-
Human Gait Modelling Using Hidden MarkovModel For Abnormality
Detection
Sourav ChattopadhyayMachine Intelligence and Bio-Motion Research
LabDepartment of Computer Science and Engineering
National Institute of Technology RourkelaRourkela, India
[email protected]
Anup NandyMachine Intelligence and Bio-Motion Research
LabDepartment of Computer Science and Engineering
National Institute of Technology RourkelaRourkela, India
[email protected]
Abstract—This paper presents a novel approach to humangait
analysis using wearable Inertial Measurement Unit(IMU)sensor-based
technique.The proposed system emphasizeson detection of certain
abnormal gait patterns. It includeshemiplegic and equinus gait
which are synthetically generatedin our lab.The designed prototype
contains an IMU sensorwith 3 axial accelerometer and gyroscope. It
provides linearacceleration and angular velocity of human foot.A
probabilisticframework,Hidden Markov Model(HMM) is applied to
modelbipedal human gait.This model uses Symbolic
AggregateApproximation(SAX) method for generating
observationsequences obtained from sample gait cycles.The detection
ofabnormal gait pattern is based on maximum log-likelihoodof an
unknown observerd sequence,generated from a gaitcycle.The
experimental results demonstarte that the proposedHMM-based
technique is able to detect gait abnormality ingait data.The
proposed personalized gait modelling approachis cost effective and
reliable to implement in gait rehabilatationprocess.
Index Terms—IMU sensor,Human gait, Accelerometer, Gy-roscope,
HMM,Wearable sensor,Abnormal gait
I. IntroductionHuman gait is a spatio-temporal signal and it has
its
own independent nature that differs individually. It maybe
assumed that different gait features,extracted fromraw gait data
can be analyzed using different machinelearning technique for
several real world applications.Analysis of gait data can be
employed for designing anintelligent system for biometric
recognition. Gait datacan also be featured for modelling a system
to detectdifferent gait modes. Similarly human gait analysis
canalso be used in the clinical domain. There are severaltypes of
gait abnormality that can be avoided by earlydetection of unnatural
gait pattern. A proper human gaitmodelling for abnormality
detection can also help in gaitrehabilation proess. An intelligent
system can be designedin such an way to find abnormality in gait
pattern.This kind of system may provide a better assessmenton an
individual’s gait pattern than human supervisedmethod of gait
assessment. The reason includes thathuman supervised approach for
gait assessment depends
much on the observation of an observer which may vary.Human gait
is a quasi-periodic signal that gets repeatedwithin a time
interval. A single gait cycle is comprisedof eight phases. An
individual with normal gait patternshould have a smooth and
consecutive transition betweeenall this phases. On the other hand a
person with abnormalgait pattern may not have smooth transition
between twoconsecutive gait phases as it may have missed some ofthe
gait phases due to abnormality in its gait pattern.It is extremely
important to understand the normal andabnormal gait
pattern.Therefore sensor-based gait analysismethod is adopted to
detect gait abnormality.
A. Related workWang et.al [1] representd similarity comparisons
be-
tween single–task walking and dual–task walking forAlzheimer’s
disease patients.In that approach data acqui-sion was done using
IMU sensor.Three axis Accelorometerand gyroscopic data were
selected as features to be fed intothe proposed model.A cyclic left
right discrete HMM wasproposed to model abnormal human gait. Chen
et.al [2]proposed an HMM-based gait abnormality detection
mod-elling using force plate and IMU sensor-based data.Thisapproach
employed an intelligent shoe(sensors were placedinside the shoe
sole) system for data acquisition.A six statediscrete left right
HMM was used for modelling normaland two simulated abnormal type of
human gait(toe inand toe out). Bae Joonbum et.al [5] illustrated an
HMM-based gait modelling on the basis of analyzing the
gaitphases.In that approach, continuous HMM was appliedto analyze
the gait phases in gait motion.That approachemployed smart shoe
sensor-based technique for dataacquisition.The Ground Reaction
Force(GRF) was consid-ered as gait as input observation sequence to
the HMM.Khorasani Abed et.al [6]demonstrated an HMM-basedmodel for
classification of Parkinson’s disease(PD), basedon raw gait data.It
incorporated Gaussian mixture modelwith HMM to separate healthy
subjects and subjects withParkinson disease. Mannini Andrea et.al
[7]recommendeda machine learning framework for gait
classification.Itemployed inertial sensors for application of
classification
-
to different pathological gait such as elderly, post-strokeand
Huntington’s disease patients.That method used anSupport Vector
Machine(SVM) classifier to the HMMderived information. Yang Yiding
et.al [3] proposed anHMM based gait mode discrimination model.That
methodused human lower limb gait accelation signal as featurefor
the proposed model.Wavelet transformation approachwas employed for
gait feature extraction.
B. OverviewThis paper proposes a cost effective IMU sensor
based
technique for human gait analysis. Accelerometer andgyroscopic
data, captured using IMU sensor, are used inthis proposed approach
as gait freatures to be fed as inputto the model. A left-to-right
HMM for gait modellingis used instead of a cyclic left-to-right
HMM.Proposedmethod employes SAX for generating discrete
observationsequence.The proposed model is able to
discriminatebetween normal and abnormal gait cycle pattern.A
detaildescription about data acquisition and preprocessing
ispresented in section II.Section III gives an overviewof HMM and
illustrates proposed gait modelling viaHMM.Section IV depicts
experiemental details and re-sult analysis.Finally this paper is
ended with explainingconclusion and illustrates scope for future
work.
II. DATA COLLECTIONThis research approach uses a single custom
made pro-
totype that contains an IMU sensor(capable of measuring3 axial
accelarometer and gyroscopic data). This IMUsensor captures
accelerometer data, gyroscopic data andmagnetometer data in X, Y
and Z direction from humangait. Only accelerometer and gyroscopic
data is used forfeature extraction. Unlike IOT (Internet of Thing)
basedIMU sensor this sensor has inbuilt slot for holding amemory
card that stores the gait signal data.
A. Sensor specificationThe SparkFun 9DoF Razor IMU M0 has a
SAMD21
microprocessor with an MPU-9250 9DoF.Fig 2(a) and2(b) below
shows the front and back view of the senosorrespectively
(a) (b)
Fig. 1: IMU sensor
The 9DoF Razor’s MPU-9250 features three 3-axissensors—an
accelerometer, gyroscope and magnetometer
that measures linear acceleration, angular rotation veloc-ity
and magnetic field vectors.Data capturing is done atsampling
frequency of 100 Hz using this sensor.
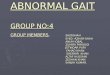
B. Positioning the sensorIn this research work sensor is placed
at right shank
position for capturing the gait data.
(a) (b)
Fig. 2: Positioning the IMU sensor
Fig. 2(a) and 2(b) shows normal and simulated equinusgait data
capture and position of the sensor. In all thecases, sensor is
placed on right leg shank only consideringthe fact, gait follows
symmetry for left and right leg in caseof normal gait.In case of
simulated gait abnormality,sensoris placed on effected right leg
shank.
C. Data captureTreadmill data is captured for 4 healthy
subjects.They
were asked to walk for 6 minutes on the treadmill atnormal
walking speed(2.5km per hour)to collect normaland simulated
abnormal gait data.Each signal produceson an average 270 gait
cycles.In this research we haveexplored large sample of gait cycles
to train the modelfor detection of gait abnormaility instead of
consideringentire gait signal (comprised of smaller number of
gaitcycles) to train the model.Since the captured gait signalis
noisy,the preprocessing technique is applied to removeunwanted
information from the signal.
Fig. 3: Raw gyroscopic signal
The captured noisy gyroscopic signal in X,Y,Z axis isillustrated
in Fig. 3.
-
D. Preprocessing of raw dataPre-processing mainly constitutes of
three main phases.
First phase is clipping the gait signal part only and
secondphase is to filter out the noise from the gait signal.
Thirdphase identifies a single gait cycle from all the gait
signals.
Fig. 4: Filtered gyroscopic signal
Fig. 4 shows filtered gyroscopic signal(at right).Firstphase of
preprocessing is completed using framingconcept and for second
phase low pass IIR (InfiniteImpulse Response) filtering is used
with a cut offfrequency of 5 Hz.
Fig. 5: Extracted single gait cycle
Fig. 5 shows extracetd single gait cycle from Y axisgyroscopic
signal which is obtained from third phase ofpre-processing.In this
phase a single gait cycle is extractedfrom filtered signal using
signal auto-correlation.
III. Proposed WorkSince gait signal is nondeterministic in
nature it requires
a probabilistic technique for modelling human gait.TheGait
phases are hidden from outside observation and theycan only be
observed using some of the gait features.TheHMM is known as double
stochastic process which issuitable for modelling gait signal to
understand the uncer-tainty present in the signal.Accelarometer and
gyroscopicdata provides three axial linear accelaration and
angularvelocity of foot respectively.In the proposed
method,gaitcycles are extracted from each of the gait signals.Each
ofthe discretized cycles are used as observation sequence for
training and testing purpose of the model.Since cyclic na-ture
of gait signal is not used for training or test purpose,a left
right, first order Hidden Markov model(HMM) isused for modelling
the gait instead of cyclic HMM.Fig. 6depicts the block diagram for
the proposed system.
A. HMM overviewAn HMM is collection of finite set of states S
=
s1, s2...sn interconnected by transitions. Each state hasnumber
of distinct observation symbols V= v1, v2...vn [8][4].An HMM model
can be represented as follows:
λ = (A,B, π) (1)
A: State transition probability distribution =aij .aij = State
transition from si to sjB: Observation
symbol=bj(Ot).bj(Ot)=Emission at state j at time t.π =initial state
probability distribution vector.Transition matrix for a four state
first order left-to-right
HMM can be defined as:
a11 a12 0 00 a22 a23 00 0 a33 a340 0 0 a44
According to this above state transition matrix a state canhave
a self loop or it can go to the immediate next stateonly but it
can’t go back to any of it’s previous state.
B. Proposed ModelIn proposed HMM model all the eight gait phases
have
been divided into four states.Hence there is four hiddenstates
in this model.State 1 includes initial contact andloading response
phase.State 2 is comprised of mid-stanceand terminal stance
phase.State 3 consists of preswing andinitial swing phase.Mid swing
and terminal swing phasesare merged into state 4.Hidden states in
fig. 7 can beconsidered as discussed above.
Fig. 6: Block diagram of proposed system
The proposed model λ = (A;B;π) uses Forwardalgorithm for forward
recursion.Backward algorithm forbackward recursion which is time
reversed version offorward algorithm.Baum-Welch algorithm is used
for
-
learning or re-estimation of the parameters for the pro-posed
model.Learning of HMM parameters(the transitionprobabilities aij
and emission probabilities bjk) is the mostimportant part in a HMM
model. There is no knownmethod for obtaining the optimal or most
likely set ofparameters from the data. But this can be always
nearly
Fig. 7: Proposed model
determined by this Baum-Welch algorithm. It is an in-stance of
generalized expectation maximization algorithm.The general approach
is to iteratively update the weightsof the model parameters in
order to better explain theobserved training sequences [8].
C. Observation sequence generation using SAX algorithmEach of
the gait cycle extracted from gait signal is
discretized in order to be fed as input to the
HMM.Fordiscretization of gait cycle SAX [11] technique isemployed
[1]. SAX is a simple but efficient techniquefor representing a time
series data into a series ofsymbols.Thus implementing SAX a signal
can beconverted into a string of symbols.Generated SAXsymbols are
multiplied by a factor in order to generatea discrete observation
sequence.SAX algorithm isimplemented using two steps.In first step,
it transformsthe time series data into a representaion,known
asPiecewise Aggregate Approximation(PAA).Second stepconverts the
PAA data into a series of symbols.
1) PAA : PAA divides a signal into N windows andthen calculates
a representing value for that window.
V̄n =
l∑m=1
vmn/l (2)
V̄n is the representing value at nth window where l is thelength
of the window.vmn means mth value in nth window.
Fig. 8: Piecewise approximation aggregation
Fig. 8 shows PAA representation of a signal.2) Conversion of PAA
values into symbols: Represent-
ing value of each window is converted into a symbolicvalue using
following equations:
V̂n = 1, if V̄n > µV̂n = 0, if V̄n < µ
(3)
µ is the mean value of the representing window values,obtained
from PAA process of SAX technique.
Fig. 9: Encoding of symbol
Fig. 9 illustrates encoding of symbols from PAA rep-resented
vallues.Once symbolic values are generated ,ob-servation sequence
is generated using following equation:
obsn = V̂gn,x ∗ 25 + V̂ gn,y ∗ 24 + V̂ gn,z ∗ 23+V̂ an,x ∗ 22 +
V̂ an,x ∗ 21 + V̂ an,x ∗ 20
(4)
obsn is observation symbol at nth window. V̂ gn,x,V̂ gn,y,V̂
gn,zare symbolic values in x,y,z axis respectively afterapplying
SAX algorithm for nth window for gyroscopicsignal.Similarly V̂
an,x,V̂ bn,y,V̂ cn,z are symbolic values in x,y,zaxis respectively
after applying SAX algorithm for nthwindow for accelarometer
signal.
D. HMM AlgorithmsForward algorithm [8] in HMM is used to find
log-
likelihood of a given sequence.Output of forward algorithmis
probabillity of generating a given sequence.Input to theforward
algorithm is the observation sequence generatedby SAX algorithm
when applied to gait signal.
Algorithm 1 Forward algorithmInput: observation sequence obsT
generated from single
gait cycleOutput: log-likelihood of given obsT
Initialisation t = 0 ,T ,aij ,bjk,αj(0)LOOP Process
1: for t = t+ 1 to T do2: αj(t) = bjkobsT (t)
∑Ni=1 αi(t− 1)aij
3: end for4: return log
∑Ni=1 α(T )
-
Backward algorithm [8] is used here to find the theprobability
of generating rest of the symbols of a givenobservation sequence
generated from a single gait cycle.
Algorithm 2 Backward algorithmInput: observation sequence obsT
generated from single
gait cycleOutput: Backward probability of given obsT
Initialisation t = T ,aij ,bjk,βj(T )LOOP Process
1: for t = t− 1 to 0 do2: βi(t) =
∑Nj=1 βj(t+ 1)aijbjkobs
T (t)3: end for4: return βi(0)
From calculated α and β matrix a new variable γ
iscalculated.
γij = αi(t− 1)aijbjkβj(t)/prob(obsT |λ) (5)
aij =
T∑t=1
γij(t)/
T∑t=1
∑k
γik(t) (6)
bjk =
T∑t=1obs(t)=k
γjl(t)/
T∑t=1
∑l
γil(t) (7)
Learning is the most important part of HMMtechnique.Baum-Welch
algorithm [4] [8] which is basicallyan expectation-maximization
algorithm is implemented forHMM parameter learning.It does not
ensure a globallyoptimized values.
Algorithm 3 HMM learning algorithmInput: aij , bjk,training
sequence obsTOutput: refined aij , bjk
Initialisation diff_likelihood, new_likelihood,old_likelihood,
convergence_threshold:θ,iteration =0,max_iteration,aij ,bjkLOOP
Process
1: while (iteration < max_iteration)or(diff_likelihood >θ)
do
2: compute new_likelihood of obsT3: compute aij(iteration) from
aij(iteration− 1) and
bjk(iteration− 1) ...by equation (6)4: compute bjk(iteration)
from aij(iteration− 1) and
bjk(iteration− 1) ...by equation (7)5:
diff_likelihood=new_likelihood−old_likelihood6:
iteration=iteration+17: end while8: return refined aij and bjk
This HMM learning algorithm presented here is mod-ified
Baum-Welch algorith for training of the multipleobservation
sequence according to the classic paper ofRabinier [4] [8] [9]
[10].
IV. Results and DiscussionExperiments are done using data
captured from 4
healthy subjects.Table I and Table II show the experi-mental
results for classification of normal and abnormalgait cycle
detection for two kinds of abnormality detectionfor subject1.
TABLE I: Log-likelihood calculation for Equinus
gaitLog-likelihood of normal and equinus gait
Log-likelihood M1(Normal gait ) M2(Abnormal gait)S1N-OS1
-14.34540342 -14.18745553S1N-OS2 -14.42071205 -14.67719142S1N-OS3
-14.48198901 -14.55779299S1N-OS4 -14.80423508 -15.03437918S1N-OS5
-14.25107514 -14.52106819S1N-OS6 -14.13267604 -14.70796865S1N-OS7
-14.15164197 -14.1785745S1N-OS8 -14.22850167 -14.47307013S1N-OS9
-14.26631103 -14.10508605S1N-OS10 -14.12640173 -14.63065957S1N-OS11
-14.22788245 -14.40307065S1ABN-OS1 -14.56738661
-14.91299052S1ABN-OS2 -14.75255629 -14.2137046S1ABN-OS3
-14.32937907 -14.37568544S1ABN-OS4 -14.1916366
-14.54954757S1ABN-OS5 -14.69153203 -14.56546745S1ABN-OS6
-14.43012332 -15.27524695S1ABN-OS7 -14.45491733
-14.21540613S1ABN-OS8 -14.66677913 -14.46674408S1ABN-OS9
-14.62681627 -14.28622814S1ABN-OS10 -14.58441958
-14.10381757S1ABN-OS11 -14.40854811 -14.088285
Model1(M1) is trained with all healthy gait cycles ob-tained
from subject1 and Model2(M2) is trained withabnormal gait cycles
obtained from simulated abnor-mal(equinus) gait pattern of
subject1.Now both themodel are tested with some unknown gait cycles
foreach of the class: normal and abnormal one.Total 250cycles are
used for training purpose.Table I and Ta-ble II shows
log-likelihood values of the test obser-vation sequences.Terms used
in I and Table II aredescribed here.S1N-OS’X’:Observation
sequence(OS) ’X’generated from normal gait(N) of
Subject1(S1).S1ABN-OS’X’:Observation sequence(OS) ’X’ generated
from ab-normal gait(ABN) of Subject1(S1). In case of
correctclassification test observation sequence shows higher
valueof log-likelihood for the model M1 if it is obtained
fromnormal gait pattern and for model M2 if it is obtainedfrom
abnormal gait pattern. In case of hemiplegic gaitclassification ’z’
axis gyroscope data is not taken accountbecause experimental result
has not shown much impactfor ’z’ axis gyroscope data in case of
hemiplegic gaitpattern.Experimental results demonstrates
classificationaccuracy of normal and abnormal gait cycles.A
properthreshold value is chosen on classification accuracy
forcorrect classification of abnormal gait.We have made ahypothesis
that if 60% of gait cycles of a person’s gait
-
pattern is classified as normal then that person’s gaitpattern
treated as normal where as if more than 60% gaitcycles of a
person’s gait pattern is found to be abnormalthen her or his gait
pattern is considered as abnormal.Inthis method, classification
accuracy of gait cycles of agait pattern is incorporated with a
suitable threshold. Theproposed approach is robust enough to detect
abnormalityfor each of the subjects and produces a 100% accuracy
forabnormal gait pattern classification.
TABLE II: Classification result for Equinus gaitclassification
result of normal and abnormal gait(equinus)
Count M1 M2 AccuracyS1N-OS 9 2 81%S1ABN-OS 4 7 63%
TABLE III: Log-likelihood calculation for Hemiplegic
gaitLog-likelihood of test observation sequence
Count M1(Normal gait ) M2(Abnormal gait)S1N-OS1 -12.03524019
-11.97098397S1N-OS2 -11.8092911 -12.31288088S1N-OS3 -12.13452507
-12.39798012S1N-OS4 -12.07099728 -11.77009159S1N-OS5 -11.98172752
-12.03702437S1N-OS6 -12.10371747 -12.18459808S1N-OS7 -11.82523449
-12.18726981S1N-OS8 -12.1972103 -12.12991209S1N-OS9 -11.96288124
-12.00354937S1N-OS10 -12.13532087 -12.13814056S1N-OS11 -12.05899107
-12.25221977S1ABN-OS1 -12.1196267 -12.05082355S1ABN-OS2
-12.05398188 -11.74591902S1ABN-OS3 -11.94491075
-12.05286717S1ABN-OS4 -11.91638192 -11.47622636S1ABN-OS5
-12.10518114 -11.6965143S1ABN-OS6 -11.97424737
-11.93497431S1ABN-OS7 -11.91819425 -12.23157458S1ABN-OS8
-11.95137167 -11.97121798S1ABN-OS9 -12.4274885
-12.02331618S1ABN-OS10 -11.9882695 -11.49315648S1ABN-OS11
-11.85335339 -12.04940352
TABLE IV: Classification result for Hemiplegic gaitNormal and
abnormal gait(Hemiplegic) classification result
Count M1 M2 AccuracyS1N-OS 8 3 72%S1ABN-OS 4 7 63%
V. CONCLUSION AND FUTURE WORKThe proposed approach for
abnormality detection is
based on classification accuracy of the gait cycles obtainedfrom
a person’s gait pattern.The gait pattern is said to bea normal or
abnormal person’s gait if detection accuracyof the gait cycles is
more than a threshold value then itcan be said that person is
having normal or abnormal
gait pattern. Apart from abnormality detection,thisapproach may
be useful for rehabilitation process ofgait assessment.We can infer
that patient is improvingfrom past condition if accuracy of normal
gait cycledetection is increased.Similarly with increasing
accuracyof abnormal gait cycle detection indicates the
increasedvalue of patient’s gait abnormality.Hence increment
inaccuracy of normal gait cycle detection or decrement inaccuracy
of abnormal gait cycle detection of a personsignifies improvement
of gait condition.On the other handincrement in accuracy of
abnormal gait cycle detection ordecrement in accuracy of normal
gait cycle detection ofa person indicates degradation of gait
condition of thatperson.Our current research scope is restricted to
workwith single IMU sensor placed at shank.Use of more thanone
sensor may improve the result by placing them into different parts
of the upper and lower limb.Finallyensembling of features collected
from different sensorscould improve the detection rate of gait
abnormality.
Acknowledgments : We would like to be extremelythankful to
Science and Engineering Research Board(SERB), DST, Govt. of India
to support this researchwork. The IMU sensors used in our research
experimentare purchased from the project funded by SERB withFILE
NO: ECR/2017/000408.
References[1] W. H. Wang, H. L. Wu, P. C. Chung and M. C. Pai,
”An HMM-
based gait comparison: Using Alzheimer’s disease patients
asexamples,” 2015 International Joint Conference on Neural
Net-works (IJCNN), Killarney, 2015, pp. 1-6.
[2] M. Chen, B. Huang and Y. Xu, ”Human Abnormal Gait Model-ing
via Hidden Markov Model,” 2007 International Conferenceon
Information Acquisition, Seogwipo-si, 2007, pp. 517-522.
[3] Y. Yang, F. Wang, Y. Peng and P. Zhang, ”Automatedgait
discrimination using Hidden Markov Model,” 2014 9thIEEE Conference
on Industrial Electronics and Applications,Hangzhou, 2014, pp.
1067-1071.
[4] L. R. Rabiner, “A tutorial on hidden markov models
andselected applications in speech recognition,” Proceedings of
theIEEE, vol. 77,Feb 1989 pp. 257–286.
[5] J. Bae, ”Gait analysis based on a hidden Markov model”,2012
12th International Conference on Control, Automation andSystems,
JeJu Island, 2012, pp. 1025-1029.
[6] Khorasani, Abed and Mohammad Reza Daliri. “HMM
forClassification of Parkinson’s Disease Based on the Raw
GaitData.” Journal of Medical Systems 38 (2014),pp. 1-6.
[7] Mannini et.al,”A Machine Learning Framework for Gait
Clas-sification Using Inertial Sensors: Application to Elderly,
Post-Stroke and Huntington’s Disease Patients”,Jan 2016.
[8] R.O.Duda, P.E.Hart and D.G.Stork,”Pattern
Classifica-tion”,Second edition,John Wiley,Nov 2000.
[9] Rakesh Dugad, U. B.Desai,”A TUTORIAL ON HIDDENMARKOV
MODELS”, Signal Processing and Artificial Neu-ral Networks
Laboratory,Department of Electrical Engineer-ing,Indian Institute
of Technology – Bombay,May 1996.
[10] Xiaolin Li et al,”Training Hidden Markov Models with
MultipleObservations A Combinatorial Method”, IEEE TRANSAC-TIONS ON
PATTERN ANALYSIS AND MACHINE INTEL-LIGENCE, VOL. 22, NO. 4, APRIL
2000.
[11] E. Keogh, J. Lin and A. Fu (2005). HOT SAX:
EfficientlyFinding the Most Unusual Time Series Subsequence. In
Proc. ofthe 5th IEEE International Conference on Data Mining
(ICDM2005),Houston, Texas, Nov 27-30, 2005, pp. 226 - 233.