Embed Size (px)
Citation preview
Homogeneous Coordinates (Projective Space)
• Let be a point in Euclidean space
• Change to homogeneous coordinates:
• Defined up to scale:
• Can go back to non-homogeneous representation as follows:
3-D Transformations:Translation
• Ordinarily, a translation between points is expressed as a vector addition
• Homogeneous coordinates allow it to be written as a matrix multiplication:
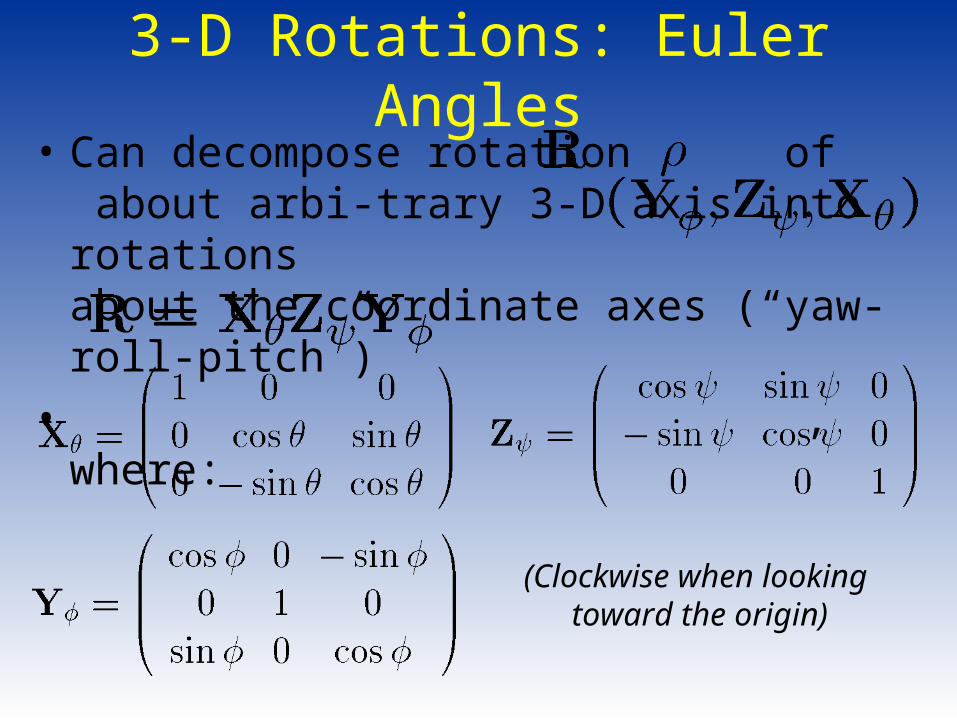
3-D Rotations: Euler Angles
• Can decompose rotation of about arbi-trary 3-D axis into rotations
about the coordinate axes (“yaw-roll-pitch”)
• , where:
(Clockwise when looking toward the origin)
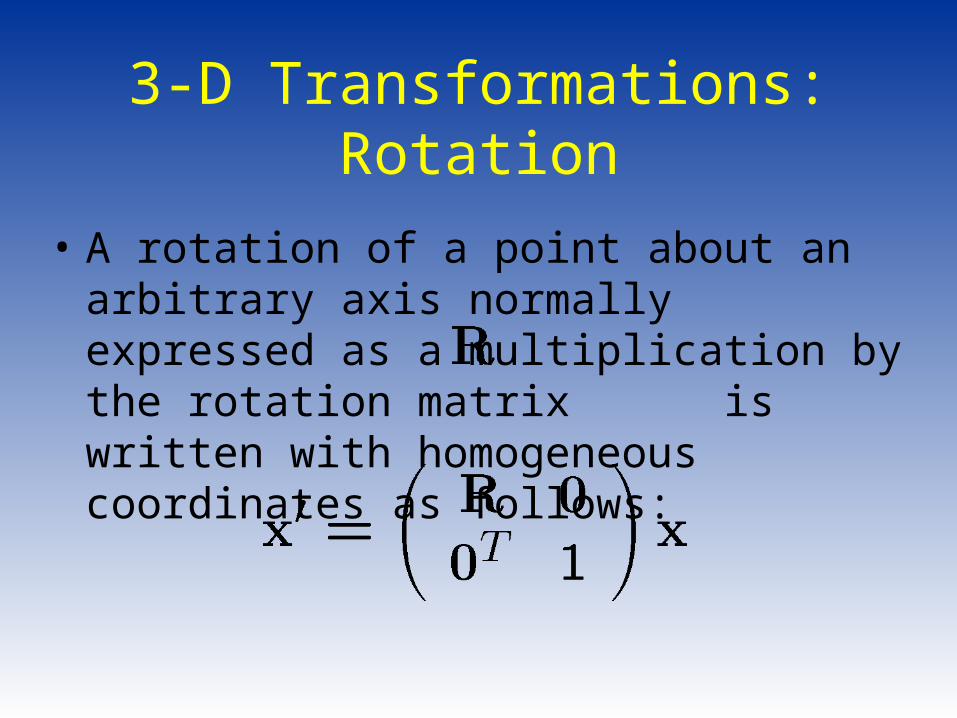
3-D Transformations:Rotation
• A rotation of a point about an arbitrary axis normally expressed as a multiplication by the rotation matrix is written with homogeneous coordinates as follows:
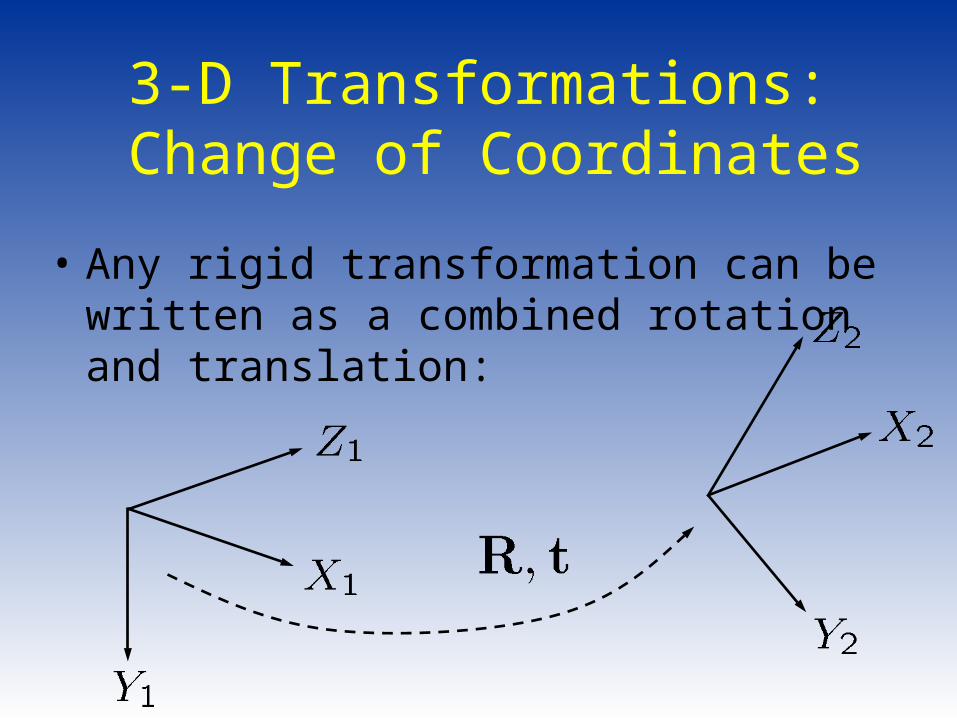
3-D Transformations: Change of Coordinates
• Any rigid transformation can be written as a combined rotation and translation:
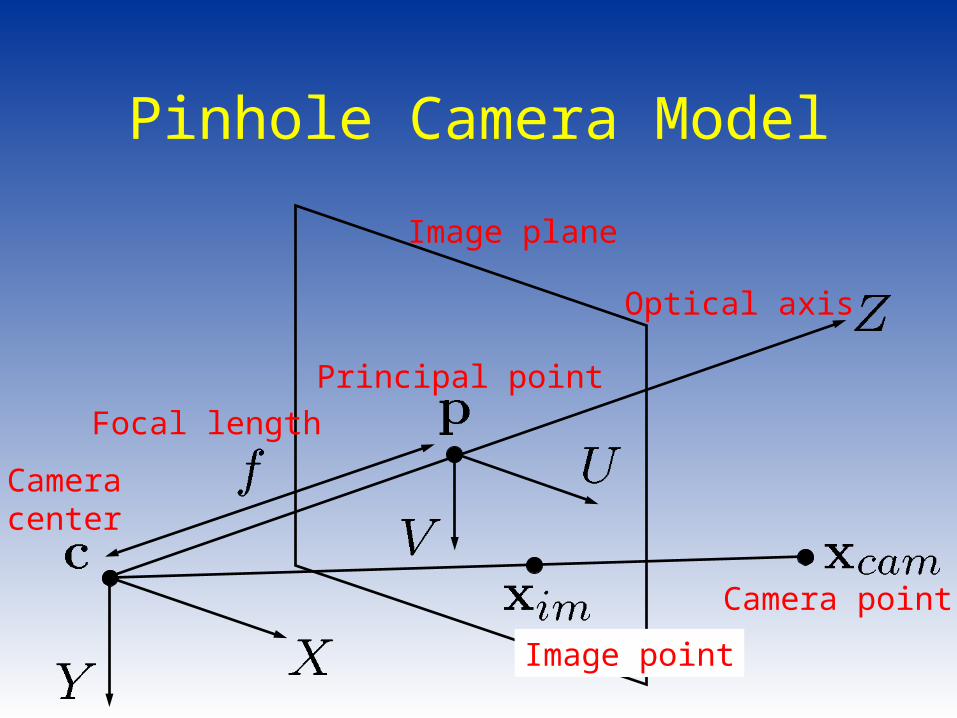
Pinhole Camera Model
Cameracenter
Principal point
Image point
Camera point
Image plane
Focal length
Optical axis
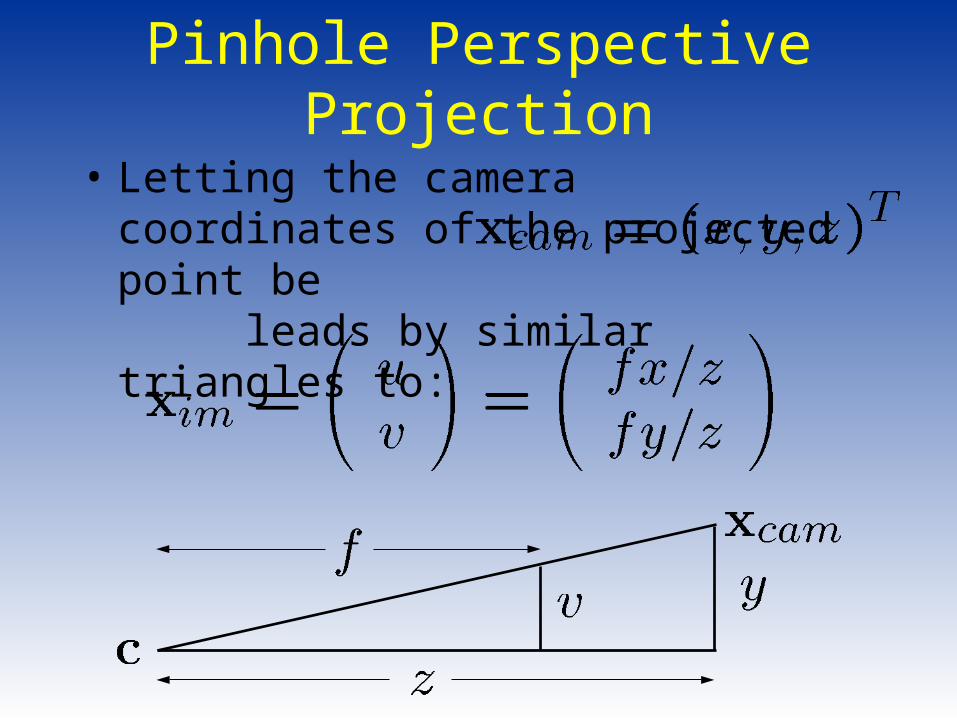
Pinhole Perspective Projection
• Letting the camera coordinates of the projected point be leads by similar triangles to:
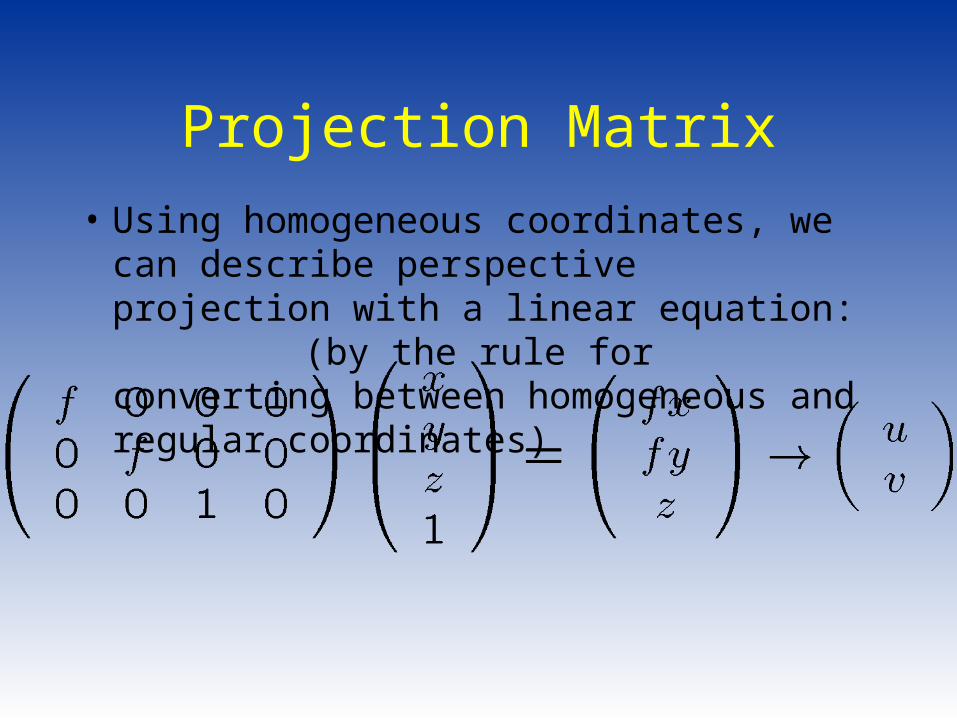
Projection Matrix
• Using homogeneous coordinates, we can describe perspective projection with a linear equation:
(by the rule for converting between homogeneous and regular coordinates)
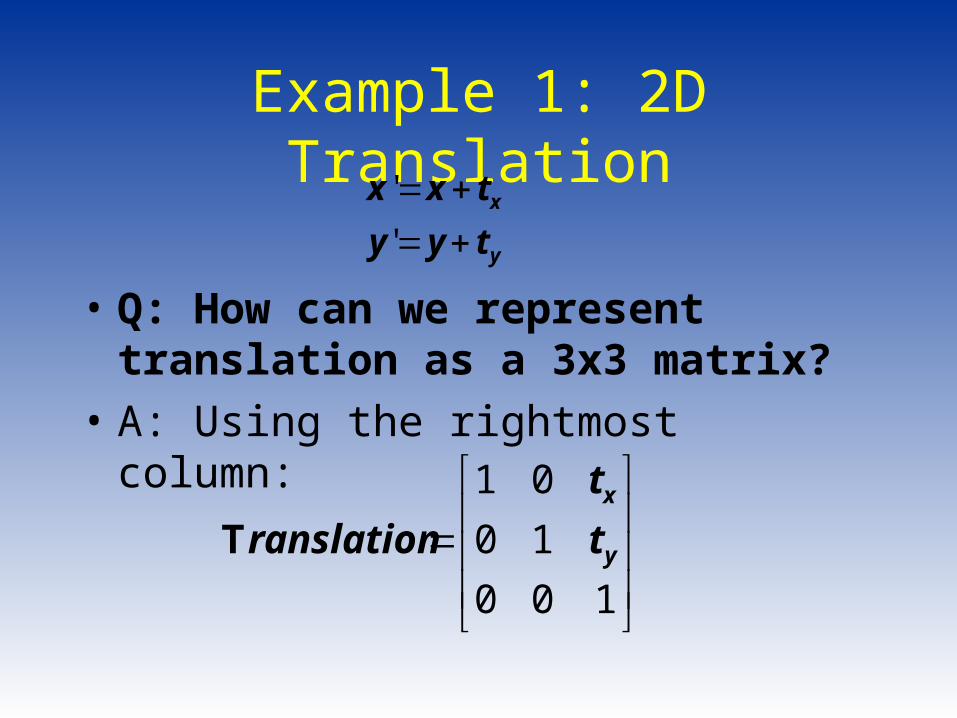
Example 1: 2D Translation
• Q: How can we represent translation as a 3x3 matrix?
• A: Using the rightmost column:
100
10
01
y
x
t
t
ranslationT
y
x
tyy
txx
'
'
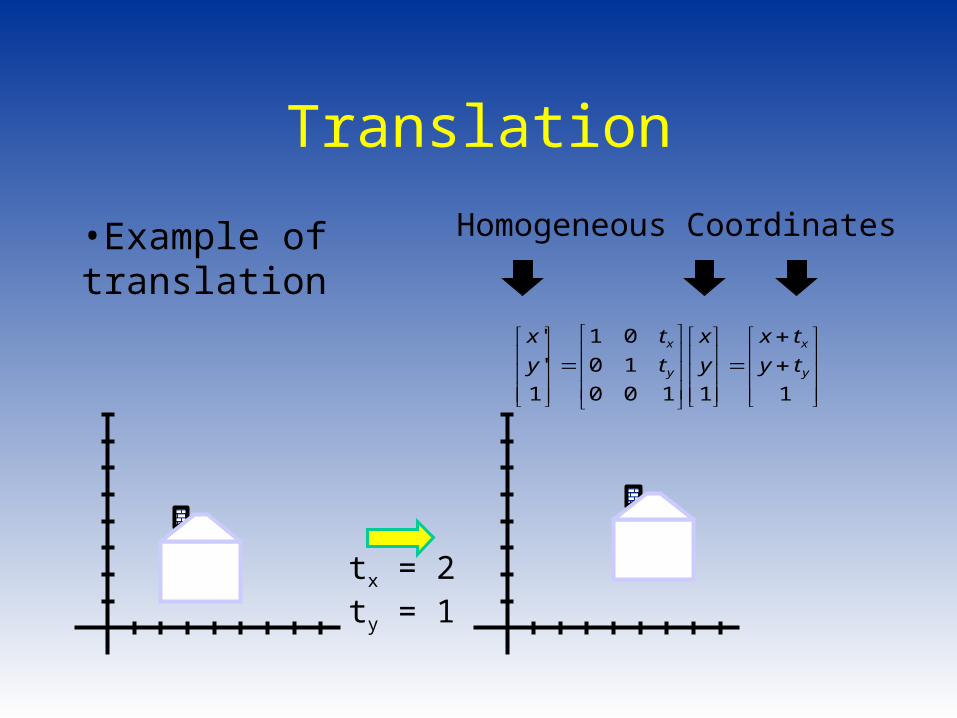
Translation
•Example of translation
11100
10
01
1
'
'
y
x
y
x
ty
tx
y
x
t
t
y
x
tx = 2ty = 1
Homogeneous Coordinates
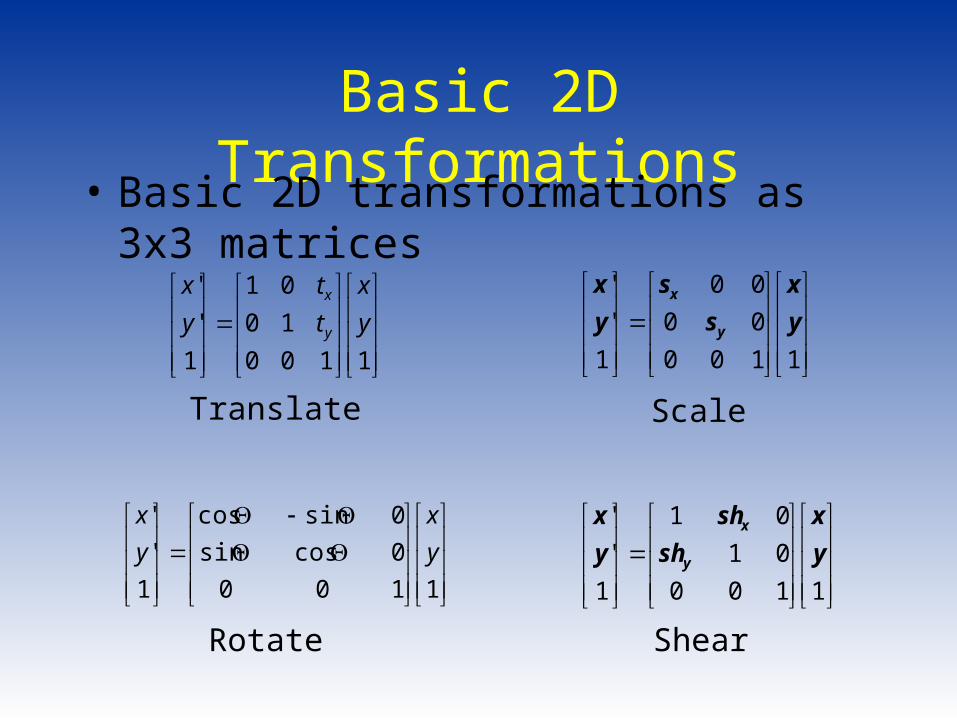
Basic 2D Transformations• Basic 2D transformations as 3x3
matrices
1100
0cossin
0sincos
1
'
'
y
x
y
x
1100
10
01
1
'
'
y
x
t
t
y
x
y
x
1100
01
01
1
'
'
y
x
sh
sh
y
x
y
x
Translate
Rotate Shear
1100
00
00
1
'
'
y
x
s
s
y
x
y
x
Scale
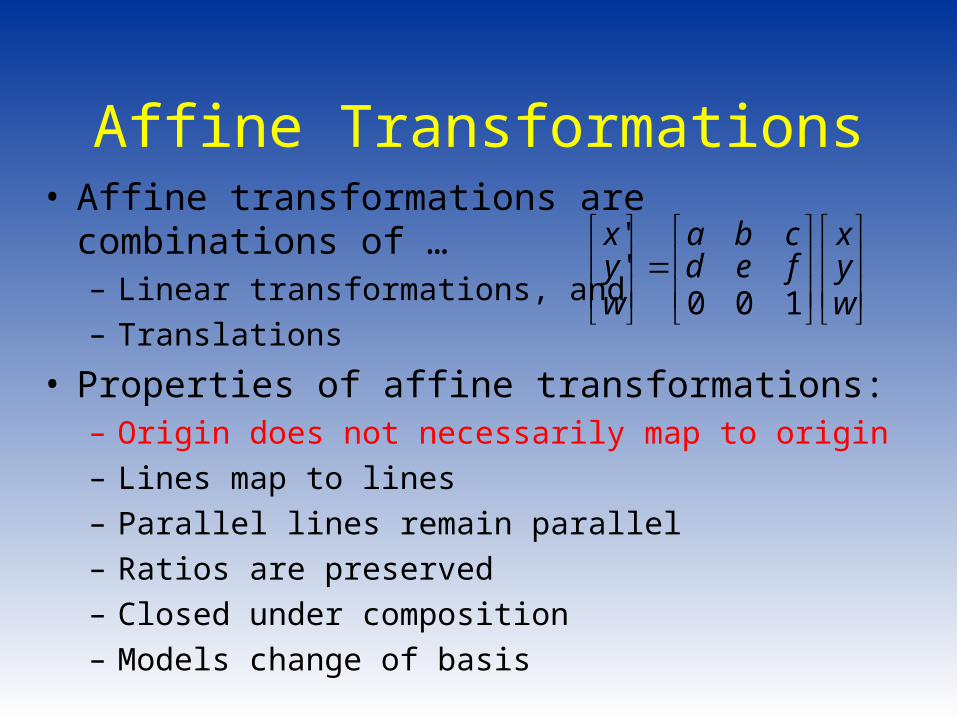
Affine Transformations• Affine transformations are combinations of
…– Linear transformations, and– Translations
• Properties of affine transformations:– Origin does not necessarily map to origin– Lines map to lines– Parallel lines remain parallel– Ratios are preserved– Closed under composition– Models change of basis
wyx
fedcba
wyx
100''

Projective Transformations• Projective transformations …
– Affine transformations, and– Projective warps
• Properties of projective transformations:– Origin does not necessarily map to origin– Lines map to lines– Parallel lines do not necessarily remain parallel– Ratios are not preserved– Closed under composition– Models change of basis
wyx
ihgfedcba
wyx
'''
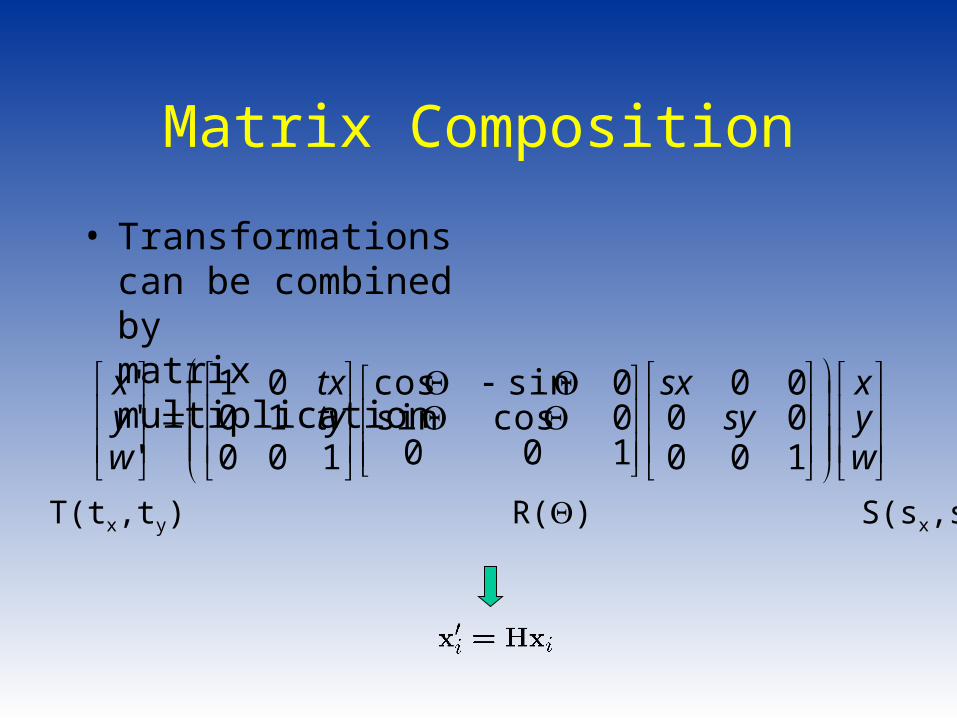
Matrix Composition
• Transformations can be combined by matrix multiplication
wyx
sysx
tytx
wyx
1000000
1000cossin0sincos
1001001
'''
p’ = T(tx,ty) R() S(sx,sy) p
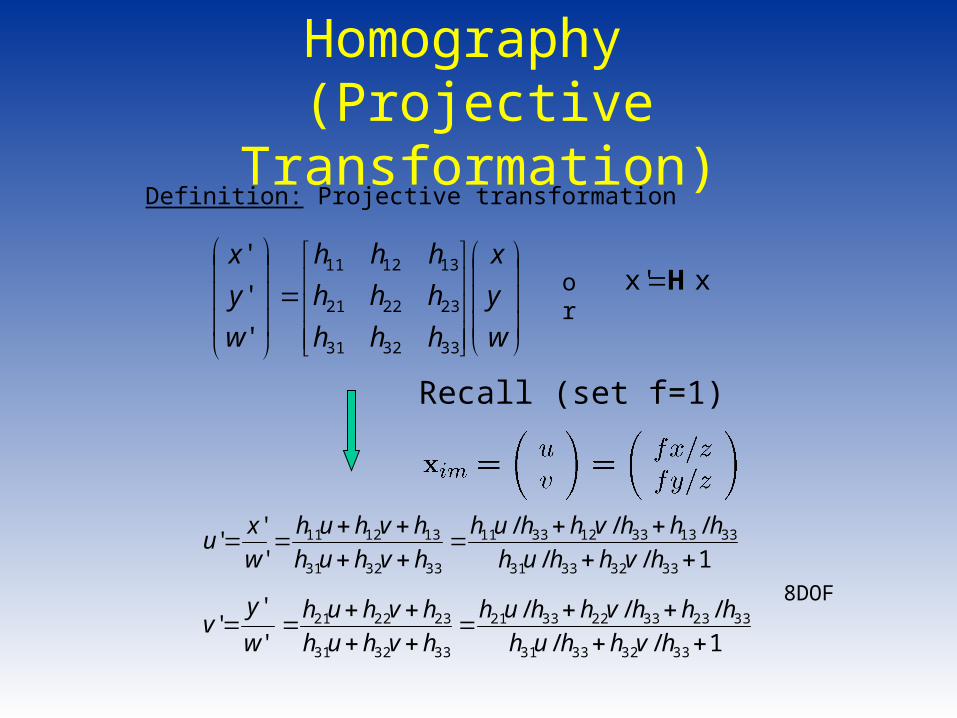
Homography (Projective Transformation)
Definition: Projective transformation
w
y
x
hhh
hhh
hhh
w
y
x
333231
232221
131211
'
'
'xx' Hor
8DOF
1//
///
'
''
33323331
331333123311
333231
131211
hvhhuh
hhhvhhuh
hvhuh
hvhuh
w
xu
1//
///
'
''
33323331
332333223321
333231
232221
hvhhuh
hhhvhhuh
hvhuh
hvhuh
w
yv
Recall (set f=1)
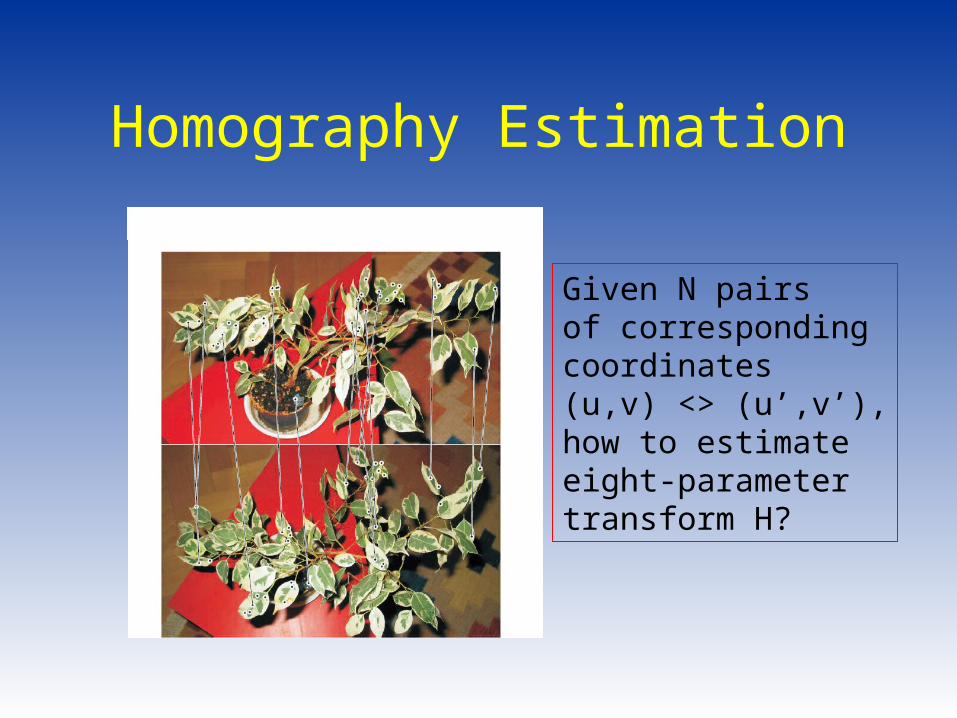
Homography Estimation
Given N pairs of correspondingcoordinates (u,v) <> (u’,v’),how to estimateeight-parametertransform H?
Computing the Homography
• 8 degrees of freedom in , so 4 pairs of 2-D points are sufficient to determine it– Other combinations of points and lines also
work
• 3 collinear points in either image are a degenerate configuration preventing a unique solution
• Direct Linear Transformation (DLT) algorithm: Least-squares method for estimating
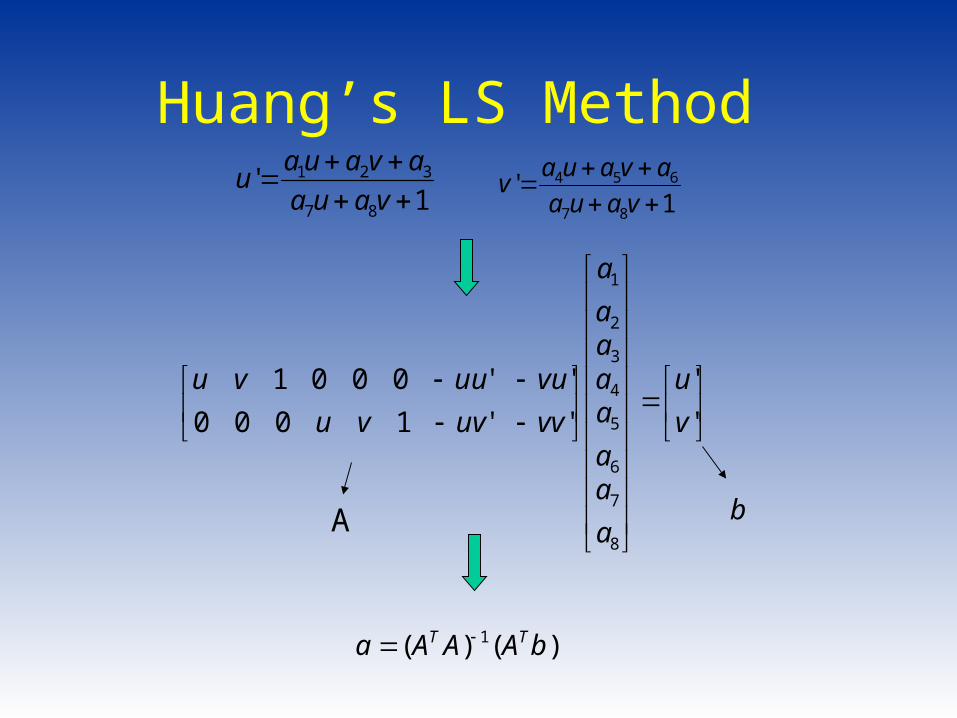
Huang’s LS Method
1'
87
654
vaua
avauav
1'
87
321
vaua
avauau
'
'
''1000
''0001
8
7
6
5
4
3
2
1
v
u
a
aa
aaaa
a
vvuvvu
vuuuvu
)()( 1 bAAAa TT
A b
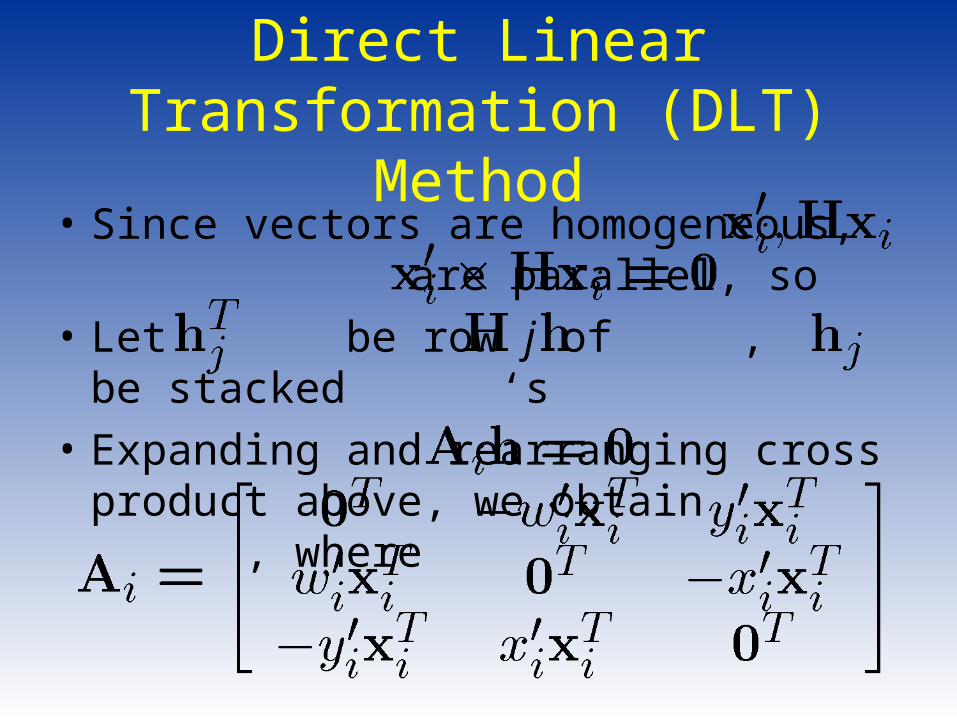
Direct Linear Transformation (DLT)
Method• Since vectors are homogeneous,
are parallel, so • Let be row j of , be stacked
‘s • Expanding and rearranging cross
product above, we obtain , where
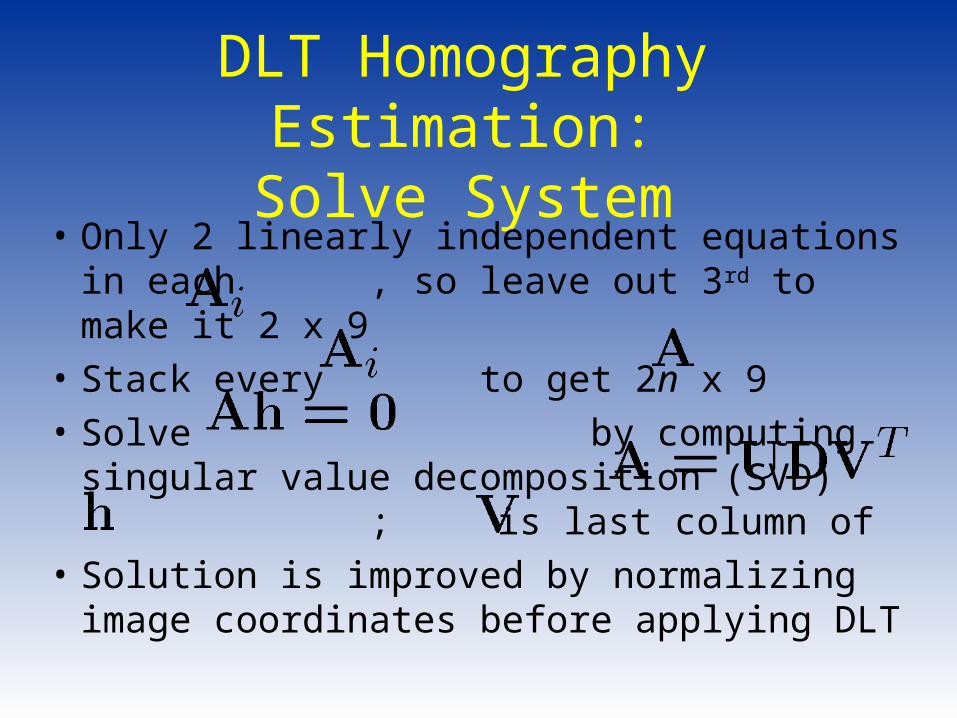
DLT Homography Estimation:
Solve System• Only 2 linearly independent equations in
each , so leave out 3rd to make it 2 x 9
• Stack every to get 2n x 9 • Solve by computing singular
value decomposition (SVD) ; is last column of
• Solution is improved by normalizing image coordinates before applying DLT
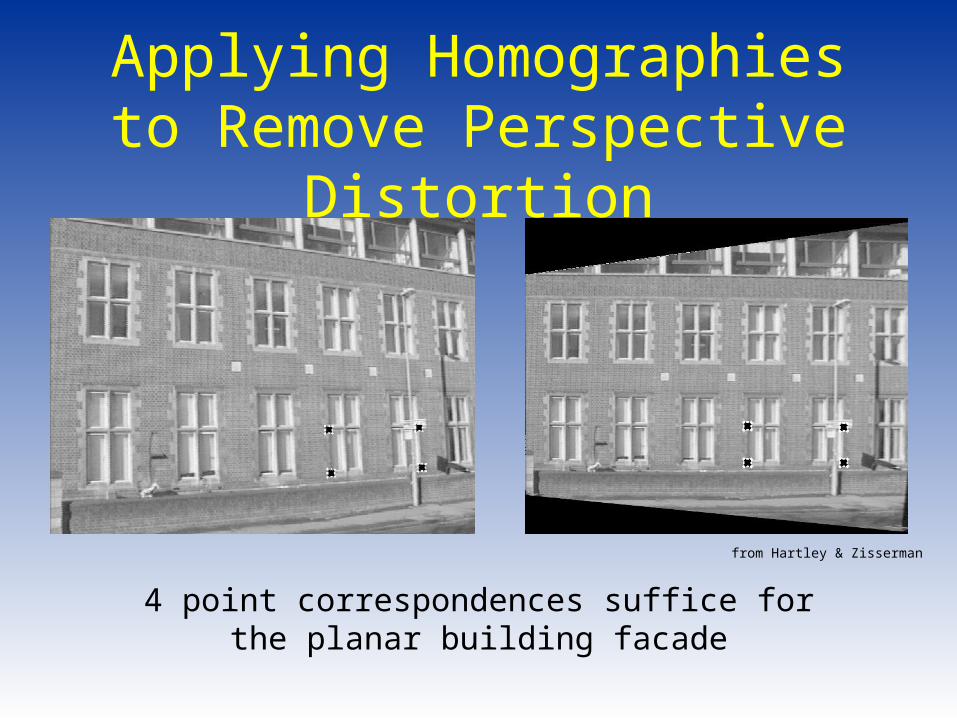
Applying Homographies to Remove Perspective
Distortion
from Hartley & Zisserman
4 point correspondences suffice forthe planar building facade
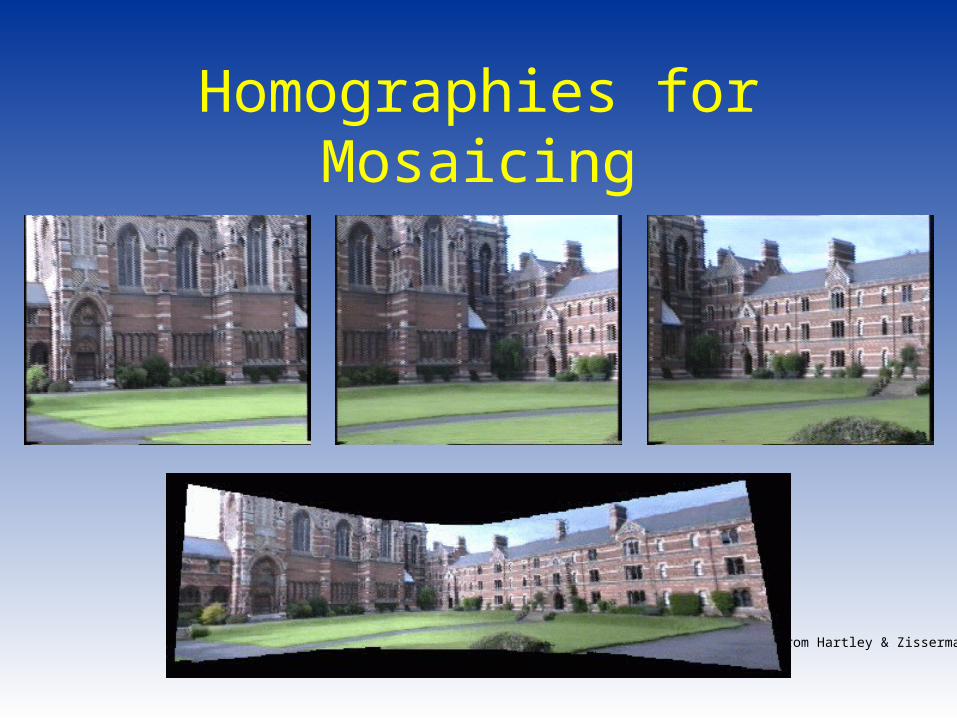
Homographies for Mosaicing
from Hartley & Zisserman