-
8/3/2019 Homogeneous Coordinates and Computer Graphics
1/14
Homogeneous Coordinates andComputer Graphics
Tom [email protected]
http://www.geometer.org/mathcirclesNovember 20, 2001
The relationship between Cartesian coordinates and Euclidean
geometry is well known. The theoremsfrom Euclidean geometry dont
mention anything about coordinates, but when you need to apply
thosetheorems to a physical problem, you need to calculate lengths,
angles, et cetera, or to do geometric proofsusing analytic
geometry.
Homogeneous coordinates and projective geometry bear exactly the
same relationship. Homogeneous co-ordinates provide a method for
doing calculations and proving theorems in projectivegeometry,
especiallywhen it is used in practical applications.
Although projective geometry is a perfectly good area of pure
mathematics, it is also quite useful incertain real-world
applications. The one with which the author is most familiar is in
the area of computergraphics. Since it is almost always easier to
understand mathematics when there are concrete examplesavailable,
well use computer graphics in this document as a source for almost
all the examples.
The prerequisites for the material contained herein include
matrix algebra (how to multiply, add, andinvert matrices, and how
to multiply vectors by matrices to obtain other vectors), a bit of
vector algebra,some trigonometry, and an understanding of Euclidean
geometry.
1 Computer Graphics ProblemsWell begin the study of homogeneous
coordinates by describing a set of problems from
three-dimensionalcomputer graphics that at rst seem to have
unrelated solutions. We will then show that with certaintricks, all
of them can be solved in the same way. Finally, we will show that
this same way is in fact just a recasting of the original problems
in terms of projective geometry.
1.1 Overview
Much of computer graphics concerns itself with the problem of
displaying three-dimensional objectsrealistically on a
two-dimensional screen. We would like to be able to rotate,
translate, and scale ourobjects, to view them from arbitrary points
of view, and nally, to be able to view them in perspective.
We would like to be able to display our objects in coordinate
systems that are convenient for us, and to beable to reuse object
descriptions when necessary.
As a canonical problem, lets imagine that we want to draw a
scene of a highway with a bunch of carson it. To simplify the
situation, well have all the cars look the same, but they are in
different locations,moving at different speeds, et cetera.
We have the coordinates to describe a tire, for example, in a
convenient form where the axis of the tire isaligned with the -axis
of our coordinate system, and the center of the tire is at
. We would liketo use the same description to draw all the tires
on a car simply by translating them to the four locationson the
body. Our car body, of course, is also dened in a nice coordinate
system centered at
andaligned with the , , and -axes.
Once we get the tires attached to the body, wed like to make
multiple copies of the car in different
orientations on the road. The cars may be pointing in different
directions, may be moving uphill anddownhill, and the one that was
involved in a crash may be lying upside-down.
1
-
8/3/2019 Homogeneous Coordinates and Computer Graphics
2/14
Perhaps we want to viewthe entire scene from the point of view
of a trafc helicopter that can be anywhereabove the highway in
three-dimensional space and tilted at any angle.
Well deal with the viewing in perspective later, but the rst
three problems to solve are how to translate,rotate, and scale the
coordinates used to describe the objects in the scene. Of course we
want to be ableto perform combinations of those operations 1.
We assume that every object is described in terms of
three-dimensional cartesian coordinates like ,and we will not worry
how the actual drawing takes place. (In other words, whether the
coordinates arevertices of triangles, ends of lines, or control
points for spline surfacesits all the same to uswe justtransform
the coordinates and assume that the drawing will be dragged around
with them.)
Finally, except in the cases of rotation and perspective
transformation, it is easier to visualize and ex-periment with
two-dimensional drawings and the extension to three dimensions is
obvious and straight-forward.
1.2 Translation
Translation is the simplest of the operations. If you have a set
of points described in cartesian coordinates,and if you add the
same amount to the -coordinate of every one, all will move by the
same amount inthe -direction, effectively moving the drawing by
that amount. Adding a positive amount moves to theright; a negative
amount to the left.
Similarly, additions of a constant value to the or -coordinate
cause uniform translations in those direc-tions as well. The
translations are independent and can be performed in any order,
including all at once.If an object is moved one unit to the right
and one unit up, thats the same as moving it one unit up andthen
one to the right. The net result is a motion of length units to the
upper-right.
We can dene a general translation operator as follows:
! " ! # $ & %' (0 ) 1 2 (3 ) 4 5 (0 ) 6
where ) 1 , ) 4 , and ) 6 are the translation distances in the
directions of the three coordinate axes. They maybe positive,
negative, or zero. ! " ! # is a function mapping points of
three-dimensional space into itself.This ! " ! # has an inverse, 8
7$ 9
! " ! #
%'
7
!
7
" !
7
# which simply translates in the opposite directionsalong each
coordinate axis. Clearly:
! " ! #
7
!
7
" !
7
# $ & %
A @3 ) 15 (0 ) 1 8 @B ) 45 (3 ) 4 C @B ) 6D (3 ) 6 E %' $ F
1.3 Rotation about an Axis
Well begin by considering a rotation in the - plane about the
origin by an angle G in the counter-clockwise direction. Clearly,
all of the -coordinates will remain the same after the rotation. We
willdenote this rotation by HA 6 ! I . The subscript is because the
rotation is, in fact, a rotation about the -axis.
Figure 1 shows how to obtain the equation for the rotation. We
begin with a point PQ %Q $ and wewish to nd the coordinates of PC
RS %' R R which result from rotating P by an angle G
counter-clockwiseabout the -axis. The equations are most easily
obtained by using polar coordinates, where T8 %' U VE (3 Vis the
distance from the origin to P (and to PC R ) , and W is the angle
the line connecting the origin to Pmakes with the -axis.
As we can see in the gure, X %Y T& ` a b W and %Y T& b c
d5 W , while S R %Y T& ` a b W (0 G and RS %Y T& b c d$ W
(0 G .1There is one other operation that can easily be performed
called shearing, but it is not particularly useful. The general
homogeneous transformations that well discover also handle all
the shearing operations seamlessly.
2
-
8/3/2019 Homogeneous Coordinates and Computer Graphics
3/14
P = (x, y) = (r cos , r sin )P = (x, y) = (r cos , r sin )
P = (x, y) = (r cos ( + ), r sin ( + ))P = (x, y) = (r cos ( +
), r sin ( + ))
Figure 1: Rotation about the e -axis
Using the addition formulas for sine and cosine, we obtain:f g h
i p h qs rt f u& v w x f y 3 q i u& x $ f y 0 q q
rt f u& v w x y5 v w x 2 B u& x 5 y5 x D S i u& v w
x y5 x D C 0 u x 5 yC v w x q
rt f gC v w x 2 3 pD x E S i gC x D C 3 pD v w x q
Thus we obtain: Af g$ i p i
e
q& r' f gC v w x 2 3 pE x D S i gC x D C 3 pD v w x i
e
q
(1)
As was the case with translation, rotation in the clockwise
direction is the inverse of rotation in thecounter-clockwise
direction and vice versa:
X $
r
A
. Its a good exercise to check this by applyingequation 1 and
its inverse to a point
f g i p q
.
The equations for rotation about theg
andp
axes can be obtained similarly, and for reference, here are
all
three equations together:A
f g i p i
e
q rt f g$ i pD v w x 2
e
x E S i pD x D C
e
v w x q
(2)A
f g i p i
e
q rt f g5 v w x C
e
x D S i$ p i& D g5 x D C
e
v w x q
(3)A
f g i p i
e
q rt f g5 v w x 2 B pD x D i g5 x D C 0 pD v w x S i
e
q
(4)
At rst glance, it appears that we have made an error in the
signs in equation 3 for the rotation aboutthe
p
-axis, since they are reversed from those for rotations about
theg
and e -axes. But all are correct.The apparent problem has to do
with the fact that the standard three-dimensional coordinate system
isright-handedif the
g
andp
-axes are drawn as usual on a piece of paper, we must decide
whether thepositive e -axis is above or below the paper. We have
chosen to place positive e values above the paper.
A left-handed system, where the positive e -axis goes down, is
perfectly reasonable, but the usual conven-tion is the other way,
and the difference is that the signs in some operations are
switched around. Thenormal orientation is called a right-handed
coordinate system and the other, left-handed. Even if wehad used a
left-handed system, the signs would not be the same throughout the
equations 2-4; a differentset of signs would be ipped.
Think of the orientation of a rotation as follows: to visualize
rotation about an axis, put your eye onthat axis in the positive
direction and look toward the origin. Then a positive rotation
corresponds to acounter-clockwise rotation. Weve done this with
rotation about the e -axisyour eye is above the paperlooking down
on a standard
g
-p
coordinate system. But visualize the situation looking from the
positivep
and positive e directions in a right-handed coordinate system.
Looking from theg
direction, thep
goesto the right and the e goes up, but looking from the
positive
p
-axis, theg
-axis goes to the left , while thee -axis goes up.
3
-
8/3/2019 Homogeneous Coordinates and Computer Graphics
4/14
1.4 General Rotation
What if you want to rotate about an axis that does not happen to
be one of the three principal axes (the
, , and axes are called the principal axes)? What if you want to
rotate about a point other than theorigin? It turns out that both
of these problems can be solved in terms of operations that we
already knowhow to do. Lets begin by looking at rotation about
non-principal axes that do pass through the origin.
The strategy is this: we will do one or two rotations about the
principal axes to get the axis we wantaligned with the -axis. Then
well rotate about the -axis, and nally, well undo the rotations we
didto align your axis with the -axis. To do this, assume that the
axis of rotation you want points alongthe vector . Wed like to have
it along another vector with its and -coordinates zero. If the
-coordinate is non-zero, do a rotation about the -axis to make
the -coordinate zero. If the -coordinateis still non-zero, do a
rotation about the -axis to make the -coordinate zero. Since the
rotation is aboutthe -axis, the -coordinate (which you previously
rotated to be zero) will not be affected. Thus at mosttwo rotations
will align an arbitrary axis with the -axis.
So if the problem is to rotate about the origin by an angle ,
but with an arbitrary axis, what we need to
do is perform two rotations to do the alignment. For
concreteness, assume those rotations are by aboutthe -axis and then
by about the -axis. If j j is any point in space, the new point 2 k
thatresults from a rotation of about this oddball axis is:
k
Y lA m n o lA n o & lA m n lA n lA m n C (5)
To interpret equation 5 remember that the operations are
performed from the innermost parentheses out-ward. First, rotate
about the -axis by an angle . Rotate the resulting point about the
-axis by anangle . At this point, the oddball axis is aligned with
the -axis, so the rotation you wanted to do origi-nally can now be
done with the lA m n operator. Finally, the two outermost
operations return the axis to itsoriginal orientation.
Obviously, combining ve levels of calculations from equations
2-4 will result in a nightmarish system of
equations, but something that is not difcult for a computer to
deal with.Finally, what if the rotation is not about the origin?
This time the translation operations from Section 1.2come to the
rescue together with a similar strategy to what we used above for a
non-standard axis. Wesimply need to translate the center of
rotation to the origin, perform the rotation, and translate back.
If wedenote by l any sort of rotation about any axis through the
origin (possibly constructed as a compositionof ve standard
rotations as illustrated in equation 5 above), and we wish to
perform that rotation aboutthe point $ , here is the equation that
relates an arbitrary point to its position C k after rotation:
k
Y m n n lB o m n o n o 2
1.5 Scaling (Dilatation) and Reection
What if we want to make things larger or smaller? For example,
if we have the coordinates that describean automobile, what are the
coordinates that would describe a scale model of an automobile that
istimes smaller than the original?
Its fairly clear that if we multiply all of our coordinates by
we will get a model thats thesize, but notice that if the original
coordinates had described a car a mile from the origin, the
resultingminiature car would be only about mile from the origin.
Thus our strategy does scale down the sizeof the car, but the
scaling occurs about the origin. If we wanted to scale about the
original car a mile fromthe origin, we could use the same trick we
did with rotationstranslate the car to the origin, multiply allthe
coordinates by , and nally translate the resulting coordinates back
to the original position.
Non-uniform scaling is also easy to doif we wish to make an
object twice as large in the -direction,three times as large in the
-direction, and to leave the size unchanged, we simply multiply all
the
-coordinates byz
, all the -coordinates by{
, and leave the -coordinates unchanged (or equivalently,multiply
them all by ).
4
-
8/3/2019 Homogeneous Coordinates and Computer Graphics
5/14
Thus, the most general scaling operation about the origin is
given in terms of the scale factors | } , | ~ , and| , and the
formula for such a function is:
$ & '
| }
$
| ~ |
(6)
In equation 6, if the scale values are larger than , the objects
size increases; if they are less than , itdecreases, and if they
are equal to one, the size is unchanged.
Negative scale values correspond to a combination of a size
change and a reection across the planeperpendicular to the axis in
question passing through the origin. If | } , there is no size
change, butthe object is reected through the plane
X
.
The same ideas used previously can be used to produce scaling
functions in directions not aligned withthe principal axes. If
scaling is to occur about a non-principal axis, rotate that axis to
be the -axis, scalein the -direction, and then rotate back.
Weve considered positive and negative scalings, but what happens
if, say, | }Q
? All -values arecollapsed to zero, and its as if the entire
three-dimensional space is projected to the plane
Y j
. Weare going to need this operation (or something similar) when
we draw our three-dimensional space on atwo-dimensional computer
screen.
As long as all three values | } , | ~ , and | are non-zero, the
scale function has an inverse. It should beobvious that
D $ j
, and the inverse only makes sense if all three scale values
arenon-zero. From a physical point of view its easy to see why. If
the scaling operation is really a projectionto a plane, there is no
way to undo it. Any point on the plane could have come from any of
the points onthe line through space that projected to that
point.
2 Combining Rotation, Translation, and Scaling
As we have seen above, it is often advantageous to combine the
various transformations to form a morecomplex transformation that
does exactly what we want. If we simply do the algebra, things can
getcomplicated in a hurry. To illustrate the problem, consider a
relatively simple problemwed like torotate clockwise by an angle
about an axis parallel to the -axis but passing through the point
.
The combined transformation of the point to is this:
} ~ } } ~
$
t A B Y 8 B
C
A B
C
8 3
C
and this one is pretty straight-forward. Imagine what the
combination of rotations would look like.
But there is an easy method, and well begin by looking at how to
combine rotations. It turns out that all
of the rotations about the origin can be easily expressed in
terms of matrix multiplication. If we considerour points' $
to be three-dimensional column vectors 2, every rotation
corresponds exactly to amultiplication by a certain matrix. Here is
the matrix that corresponds to a counter-clockwise rotation byan
angle about the axis:
B
C 3 D
C
C
D
The other two matrices are equally simple:2For technical
reasons, it is better to represent the vectors as column vectors.
We could use row vectors, but there are disadvan-
tages that are difcult to explain at this point. However, to
save space in the text, we will write the components as usual:
within paragraphs with the understanding that when they are
expressed as vectors in equations, they will be turned vertical to
make
column vectors. When we talk about projective lines later on,
well need to use actual row vectors, and to indicate this within
aparagraph, well use the somewhat surprising .
5
-
8/3/2019 Homogeneous Coordinates and Computer Graphics
6/14
A A Q D
E
Q C C
D
C D C
andA
D
D
D
D C
The beautiful thing about the matrix representation is that
repeated rotations about different axes corre-sponds to matrix
multiplication. Thus if you need to rotate a million vertices that
describe the skin of adinosaur in Jurassic Park VI about some weird
axis, you dont need to multiply each point by ve differentmatrices;
you simply multiply the ve matrices together once and multiply each
dinosaur point by thatone matrix. Its a savings of almost four
million matrix multiplications which can take time, even on afast
computer.
The scaling matrix is even simpler:
$
$ Q $
Q $
It can be combined in any combination with the rotation matrices
above to make still more complextransformations. As with the
rotation matrices alone, the combination of operations simply
correspondsto matrix multiplication.
Unfortunately, when we try to do the same thing with the
seemingly simpler translation operation, we aredead. It just will
not and cannot work this way. Its easy to see why. If you multiply
the column vector
by any D 2 matrix, the result will be
. The origin is xed by every matrix multiplication,yet for a
translation, we require that the origin move.
Fortunately, there is a trick 3 to get the job done. We will
simply add an articial fourth component to eachvector and we will
always set it to be
. In other words, the point we used to refer to as
, we willnow refer to as
. If you need to nd the actual three-dimensional coordinates,
simply look atthe rst three components and ignore the
in the fourth position 4 .
Of course none of the matrices above will work either, until we
add a fourth row and fourth column withall the elements equal to
zero except for the bottom corner. For example:
D
E
C
D
C D C
But now, with this articial fourth coordinate, it is possible to
represent an arbitrary translation as a matrixmultiplication:
0
3
0
Using this scheme, every rotation, translation, and scaling
operation can be represented by a matrix mul-tiplication, and any
combination of the operations above corresponds to the products of
the correspondingmatrices.
3Computer scientists, of course, refer to a trick as a hack.4
But if it is not , beware. Well handle this case later, when we run
into the problem head-on. For now, things are nice.
6
-
8/3/2019 Homogeneous Coordinates and Computer Graphics
7/14
3 A Simple Perspective Transformation
We know that by setting one of the scale factors to zero, we can
collapse all of the -coordinates, say, to8 Y . If we think of our
computer screen as having and -coordinates in the usual way, we
want to dosomething like this to nd the screen coordinates for our
points.
But setting the scale factor to zero simply projects each point
in space to the - plane in a perpendiculardirection. To model the
real world, wed like to imagine looking at real three-dimensional
objects, andprojecting them, wherever they are, to a rectangular
piece of glass (the computer screen) that is a fewinches in front
of our eye. These rays are not projected perpendicular to the
screen; they are all projectedat the eye, and they should be drawn
on the screen wherever the ray from the object to the eye hits
thescreen.
OO 11
P = (x, y, z)P = (x, y, z)
P = (x/z, y/z, 1)P = (x/z, y/z, 1)
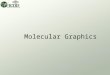
Figure 2: A Simple Perspective Projection
For deniteness, imagine that you are looking from the origin in
the direction of the negative -axis.Remember that if you look from
the positive -axis toward the negative, the - plane looks normal
toyou, with the positive -axis to the right and the positive -axis
pointing up. Imagine that we would like
to project all the points in front of you (they will be the
points with negative -coordinates) onto the planeone unit in front
of you (it will have -coordinate equal to C ). Most computer
graphics folks dont likeworking with these negative coordinates, so
they now switch to a left-handed coordinate system so thatthe point
X is in front of them, looking into the plane. Well do that here,
just so we dont need tomess with 2 as the -coordinate of
projection.
Figure 2 shows how we would like to project an arbitrary point $
to a point C on the plane.Similar triangles will show you that the
coordinates of C are $ S .
This is bad newsweve got to do a division by the -coordinate,
and the only operations we can performwith matrix multiplications
are multiplications and additions. How can we combine this
perspectivetransform with the rotations, translations, and scales
that work so well with a uniform type of matrixrepresentation?
But with one more trick (one more hack, if youre a computer
scientist), we can perform the divisionas well. It seems a shame
that we have to drag around that nal fourth coordinate when its
always goingto be equal to , but without it the matrix
multiplications dont make sense. Here is the big trick: We
willconsider two sets of coordinates to represent the same point if
one is a non-zero multiple of the other. Inother words, the point 5
represents the same point as does $ $ $ S $ 5 .
Normally, of course, , but this shows how we can convert to our
standard form if we get a pointwhose fourth coordinate does not
happen to be 1. As long as it is non-zero, we just let 0 ' , and
wend that the points 5 and $ 2 S 2 8 are equivalent.
This may seem weird at rst, but you should not feel at all
uncomfortable with it. After all, you do it allthe time with
fractions. Everybody knows that the fraction is normally written
that way, but certaincalculations give results like , , or even .
All are equivalent to .
When we represent our three-dimensional points with four
coordinates, its sort of like having a funnysort of fraction where
the three numerators share a common denominator. And exactly as is
the case with
7
-
8/3/2019 Homogeneous Coordinates and Computer Graphics
8/14
fractions, as long as the denominator (the fourth term) is not
equal to zero, well have no trouble.
Here is the matrix that performs the perspective calculation
shown in Figure 2 that takes the three-dimensional point to :
! !
" # !
$ % #
$ % #
& '
'
(
& '
'
(0 )
& '
'
(2 1
The resulting vector after the multiplication is , but remember
that we can multiply all thecomponents by the same non-zero number
and get an equivalent point, and since were looking at valuesof in
the half-space with negative -coordinates, we can multiply all of
the coordinates by to obtainthe equivalent representation: .
There is one problem with this matrix: it is singular, meaning
that it does not have an inverse. The reasonis that our calculation
effectively projected every point on the line connecting 3 and 35 4
to the same point
on the plane ) . Any function or transformation that maps two
points to the same point cannot beundone, or inverted.
At rst, this seems like a purely aesthetic problem. After all,
arent we planning to map all the pointsalong that line to the same
point on the computer screen? The problem is that in computer
graphics, youoften want to nd where to draw them on the screen but
to avoid drawing them until youve found allthe points to be drawn
there, and then to draw only the point thats nearest the eye of the
viewer. Thatsbecause in the real world, objects nearer your eye
block your vision of objects behind them.
We can solve the problem easily, and at the same time, create a
non-singular (invertable) matrix. We dontreally care that the
coordinate is after transformationall we care about are the and
coordinatesthat tell us where to paint the point on the screen.
Heres a better perspective matrix:
# ! $
% # $
! % $
! %
& '
'
(
& '
'
(6 )
8 79
& '
'
(2 1
(7)
This transforms our point to 7@ (at least after we multiply all
the coordinatesby ). The nal and coordinates are the same as
beforeeverything on that line from 3 to 35 4 goesto points with the
same and coordinatesbut the values are all different. The order of
the points isinverted, but at least its easy to see from the
transformed coordinates which ones were closer to the eye 5.
The matrix in 7 is non-singular; its inverse is:
# ! $
% # $
! % $
! %
& '
'
(
A B
)
# ! C
% # C
! ! D
! % $ E5
& '
'
(
Note that since we are dealing with transformations of
three-dimensional space, all the transformationmatrices are FH GI F
. If we were working only with points on the plane (two-dimensional
space), thetransformation matrices would have been PQ GR P . For a
line, they would have been SQ GR S , et cetera.
5 In standard computer graphics packages, a more sophisticated
version of the perspective matrix is generally used to control
thevarious aspect ratios and to control the range of T values that
emerge after the calculation. If youre interested, look at a book
oncomputer graphics for the exact forms, but the basic idea is
identical to that illustrated in transformation 7.
8
-
8/3/2019 Homogeneous Coordinates and Computer Graphics
9/14
4 Homogeneous Coordinates
Homogeneous coordinates provide a method to perform certain
standard operations on points in Euclidean
space by means of matrix multiplications. As we shall see, they
provide a great deal more, but lets rstreview what we know up to
this point.
The usual cartesian coordinates for a point consist of a list of
U points, where U is the dimension of thespace. The homogeneous
coordinates corresponding to the same point require UW VY X
coordinates.
Normally, we add a coordinate to the end of the list, and make
it equal to X . Thus the two-dimensionalpoint ` a b c d becomes ` a
b c b X d in homogeneous coordinates, and the three-dimensional
point ` ae b c b f d be-comes ` ae b c b f b X d . To learn more,
it is often useful to look at the one-dimensional space (points on
a line),and it is also useful to remember that the same method can
be applied to higher-dimensional Euclideanspaces. Homogeneous
coordinates in a seven-dimensional Euclidean space have eight
coordinates.
The nal coordinate need not be X . Since the most common use of
homogeneous coordinates is for one,two, and three-dimensional
Euclidean spaces, the nal coordinate is often called g since that
will not
interfere with the usuala
,c
, andf
-coordinates. In fact, two points are equivalent if one is a
non-zeroconstant multiple of the other. Points corresponding to
standard Euclidean points all have non-zero valuesin the nal ( g )
coordinate.
5 Projective Geometry
Whats really going on is, in a sense, far simpler. Homogeneous
coordinates are not Euclidean coordi-nates; they are the natural
coordinates of a different type of geometry called projective
geometry.
Here is the real denition of homogeneous coordinates in
projective geometry, where we will considerthe two-dimensional
version (with three coordinates) for concreteness.
Every vector of three real numbers, ` ae b c b g8 d , where at
least one of the numbers is non-zero, correspondsto a point in
two-dimensional projective geometry. The coordinates for a point
are not unique; if h is anynon-zero real number, then the
coordinates ` ae b c b g8 d and ` h ae b h c b h g8 d correspond to
exactly the samepoint.
If the g -coordinate is non-zero, it will correspond to a
Euclidean point, but if gp ir q (and at least one of a or c is
non-zero), it will correspond to a point at innity (see Section
7).
Furthermore, the allowable transformations in (two-dimensional)
projective geometry correspond to mul-tiplication by arbitrary
non-singular s5 t@ s matrices. Obviously, if two matrices are
related by the fact thatone is a constant non-zero multiple of the
other, they represent the same transformation.
The coordinates are called homogeneous since they look the same
all over the space, and with thecomplete exibility of
multiplication by an arbitrary non-singular matrix we can convert
any line to bethe line at innity, or convert points at innity to
points in normal space, et cetera. In fact, if you ever
took a perspective drawing class, the vanishing points on the
horizon are really places, where, under aperspective
transformation, points at innity wind up in normal space.
There is more to projective geometry, of course. There are
equations for lines, for conic sections, methodsto nd intersections
of lines or for nding the lines that pass thorough a pair of
points, et cetera, but wewill get to those later. Let us begin by
describing a nice mental model for two-dimensional
projectivegeometry.
6 Euclidean and Projective Geometry
Projective geometry is not the same as Euclidean geometry, but
it is closely related. The two have manythings in common. Just as
we can discuss Euclidean geometry in any nite number of dimensions,
wecan do the same for projective geometry. Of course real-world
applications are typically two and three-
9
-
8/3/2019 Homogeneous Coordinates and Computer Graphics
10/14
dimensional in both geometries, but well sometimes nd it useful
to think about the one-dimensionalversion of both.
A nice way to think about various types of geometry is in terms
of the allowable operations and theproperties that are preserved
under those operations. For example, in Euclidean geometry, we can
movegures around on the plane, rotate them, or ip them over, and if
we do these things, the resulting trans-formed gures remain
congruent to the originals. Two gures are congruent if all the
measurements arethe samelengths of sides, angles, et cetera.
In projective geometry, we are going to allow projection as the
fundamental operation. Its easy to seewhat projection means in one
and two dimensions, so well begin with those.
Suppose you have a gure drawn on a plane. You can project it to
another plane as follows: pick somepoint of projection that is on
neither of the planes. Draw straight lines through every point of
the originalgure that pass through the point of projection. The
image of each point is the intersection of that linewith the other
plane.
Note also that we can obtain projections perpendicular to the
plane of projection simply by projecting
from a point at innitysee Section 7.Notice that we have said
nothing about the orientations of the two planesthey need not be
parallel, forexample. In your minds eye, try to imagine some of
these two-dimensional projections.
7 Visualizing Projective Geometry
Here are two postulates from two-dimensional Euclidean
geometry:
u Every two points lie on a line.
u Every two lines lie on a point, unless the lines are parallel,
in which case, they dont.
In two-dimensional projective geometry, these postulates are
replaced by:
u Every two points lie on a line.
u Every two lines lie on a point.
Thats basically the whole difference. How can we visualize a
model for such a thing? The model mustdescribe all the points, all
the lines, what points are on what lines, and so on.
The easiest way is to take the points and lines from a standard
two-dimensional Euclidean plane and addstuff until the projective
postulates are satised. The rst problem is that the parallel lines
dont meet.Lines that are almost parallel meet way out in the
direction of the lines, so for parallel lines, add a single
point for each possible direction and add it to all the parallel
lines going that way. You can think of thesepoints as being points
at innityat the ends of the lines. Note that each line includes a
single point atinnitythe north-south line doesnt have both a north
and south point at innity. If you go to innityto the north and keep
going, you will nd yourself looping around from the south. Lines in
projectivegeometry form loops.
Now take all the new points at innity and add a single line at
innity going through all of them. It, too,forms a loop that can be
imagined to wrap around the whole original Euclidean plane. These
points andlines make up the projective plane.
You might make a mental picture as follows. For some small
conguration of points and lines that youare considering, imagine a
really large circle centered around them, so large that the part of
the gure of interest is like a dot in its center. Now any parallel
lines that go through that dot will hit the large circlevery close
together, at a point that depends only on their direction. Just
imagine that all parallel lines hit
the circle at that point. This large circular line surrounding
everything is the line at innity.
10
-
8/3/2019 Homogeneous Coordinates and Computer Graphics
11/14
Check the postulates. Two points in the Euclidean plane still
determine a single projective line. One pointin the plane and a
point at innity determine the projective line through the point and
going in the givendirection. Finally, the line at innity passes
through any two points at innity.
How about lines? Two non-parallel lines in the Euclidean plane
still meet in a point (the standard Eu-clidean point), and dont
meet anywhere else. Parallel lines have the same direction, so meet
at the pointat innity in that direction. Every line on the original
plane meets the line at innity at the point at innitycorresponding
to the lines direction.
Note: The projective postulates do not distinguish between
points and lines in the sense that if you sawthem written in a
foreign language:
v Every two glorphs lie on a smynx,
v Every two smynxes lie on a glorph,
there is no way to gure out whether a smynx is a line and a
glorph is a point or vice-versa. If you take any
theorem in two-dimensional projective geometry and replace point
with line and line with point,it makes a new theorem that is also
true. This is called dualitysee any text on projective
geometry.
8 Back to the Homogeneous Coordinates
So weve got a nice mental picturehow do we assign coordinates
and calculate with them? The answeris that every triple of real
numbers w x y y 5 except w y y corresponds to a projective point.
If is non-zero, w x y y 5 corresponds to the Euclidean point w x Q
y 5 in the original Euclidean plane; w xe y ycorresponds to the
point at innity corresponding to the direction of the line passing
through w y and
w x y . Generally, if is any non-zero number, the homogeneous
coordinates w xe y y 8 and w x y y 5represent the same point.
Since projective points and lines are in some sense
indistinguishable, it had better be possible to giveline
coordinates as sets of three numbers (with at least one non-zero).
If the points are column vectors,the lines will be row vectors 6
(written with a exponent that represents transpose), so w y
yrepresents a line. The point 6 w xe y y 8 lies on the line r 6 w y
y if x Y Q Y . In theEuclidean plane, the point w x y can be
written in projective coordinates as w xe y y , so the
conditionbecomes xW Y @ Y Q high-school algebras equation for a
line. The line passing through all thepoints at innity has
coordinates w y y . As with points, for any non-zero , the line
coordinates
w y y and w e y e y e represent the same line. Also, as with
points, at least one of , , or mustbe non-zero to have a set of
valid line coordinates.
In matrix notation, the point lies on the line if and only if r
9 . This is like the dot product of thevectors. Since is a row
vector and is a column vector of the same length, the product is
essentially a
5 H matrix, or basically, a scalar. If p p w x y y 5 and p w y y
, then r 9 x@ I I . If we
had chosen to represent lines as column vectors and points as
row vectors, that would work ne, too. Ithas to work because points
and lines are dual concepts.
9 Projective Transformations
Projective transformations transform (projective) points to
points and (projective) lines to lines such thatincidence is
preserved. In other words, if is a projective transformation and
points and lie on line
then @ w 5 and @ w lie on @ w . (Warning: @ w the transformation
of a linedoes not simplyuse the same matrix as for transforming
points. See later in this section.) Similarly, if lines and j
meetat point , then the lines @ w and @ w jp meet at the point @ w
.
6Remember that we are writing column vectors in the text as
rows, so were going to have to have a special notation to
indicatethat a vector in the text is really a row vector. Thats
what the transpose will be used for.
11
-
8/3/2019 Homogeneous Coordinates and Computer Graphics
12/14
The reason projective transformations are so interesting is that
if we use the model of the projectiveplane described in Section 7
where weve simply added some stuff to the Euclidean plane, the
projectivetransformations restricted to the Euclidean plane include
all rotations, translations, non-zero scales, and
shearing operations. This would be powerful enough, but if we
dont restrict the transformations to theEuclidean plane, the
projective transformations also include the standard projections,
including the veryimportant perspective projection.
Rotation, translation, scaling, shearing (and all combinations
of them) map the line at innity to itself,although the points on
that line may be mapped to other points at innity. For example, a
rotation of kdegrees maps each point at innity corresponding to a
direction to the point corresponding to the directionrotated k
degrees. Pure translations preserve the directions, so a
translation maps each point at innity toitself.
The standard perspective transformation (with a l m n eld of
view, the eye at the origin, and looking downthe o -axis) maps the
origin to the point at innity in the o -direction. The viewing
trapezoid maps to asquare.
Every non-singular e matrix (non-singular means that the matrix
has an inverse) represents a projectivetransformation, and every
projective transformation is represented by a non-singular @ R
matrix. If is such a transformation matrix and is a projective
point, then 0 is the transformed point. If is aline, represents the
transformed line. Its easy to see why this works: if lies on , 2 r
m , so
0 p m , so z { z 0 {8 p m . The matrix representation is not
uniqueas with points andlines, any constant multiple of a matrix
represents the same projective transformation.
Combinations of transformations are represented by products of
matrices; a rotation represented by matrix|
followed by a translation (matrix } ) is represented by the
matrix }|
.
A (two-dimensional) projective transformation is completely
determined if you know the images of ~independent points (or of ~
independent lines). This is easy to see. A W I matrix has nine
numbersin it, but since any constant multiple represents the same
transformation, there are basically degrees of freedom. Each point
transformation that you lock down eliminates degrees of freedom, so
the images
of ~
points completely determine the transformation.Lets look at a
simple example of how this can be used by deriving from scratch the
rotation matrix for a~ k n counter-clockwise rotation about the
origin. The origin maps to itself, the points at innity along
the
and o axes map to points at innity rotated ~ k n , and the point
z { maps to z m { .
If |
is the unknown matrix:
|
m
m
m
m
|
m
m
m
|
m
m
m
|
m
The can be any constants since any multiple of a projective
points coordinates represents thesame projective point. The
matrix
|
has basically unknowns, so those plus the ~5 s make . Eachmatrix
equation represents equations, so we have a system of equations and
unknowns that canbe solved. The computations may be ugly, but its a
straight-forward brute-force solution that gives therotation
matrix
|
as any multiple of:
|
! m
m
m m
Theres nothing special about rotation. Every projective
transformation matrix can be determined in thesame brute-force
manner starting from the images of 4 independent points.
12
-
8/3/2019 Homogeneous Coordinates and Computer Graphics
13/14
10 Three-Dimensional Projective Space
Three-dimensional projective space has a similar model. Take
three-dimensional Euclidean space, add
points at innity in every three-dimensional direction, and add a
plane at innity going through the points.In this case there will
also be an innite number of lines at innity as well. In three
dimensions, pointsand planes are dual objects.
Projective transformations in three dimensions are exactly
analogous. Points are represented by -tuplecolumn vectors: e 8 ,
and planes by row vectors: . Any multiple of a points coordi-nates
represents the same projective point. A point lies on a plane if p
r 9 . All three dimensionalprojective transformations are
represented by @ non-singular matrices.
In three dimensions, the images of independent points (or
planes) completely determine a projectivetransformation. (A R
matrix has numbers, but degrees of freedom because any multiple
rep-resents the same transformation. Each point transformation that
you nail down eliminates degrees of freedom, so the images of
independent points completely determine the transformation.) 7
The brute-force solution has
equations and
unknowns (there will beQ
s in addition to theunknowns), and although the solution is
time-consuming, it is straight-forward.
The calculation can be simplied. Suppose you want a
transformation that takes to Q , ..., and to . Let
!
Find the transformation that takes e to
and the transformation that takes to
. Because of allthe zeroes, these are much easier to work out.
The transformation you want is 5
.
10.1 Construction of an Arbitrary Transformation
Based upon the idea above, here is a purely mechanical method to
construct a transformation from anyfour independent points to any
other four points in two-dimensional projective geometry. The
method canobviously be extended to any number of dimensions, where
the images of R Y points are required todetermine the
transformation.
Suppose we seek a matrix that performs the following map:
% 5 I
%
%
%
We will construct the matrix as the product @ where:7The concept
generalizes to -dimensional space. Transformations are denoted by Q
8 Q matrices having Q
entries, but an arbitrary constant multiple reduces this to 5 e
R W Q H 8 W degrees of freedom. Each timeyou nail down the image of
an -dimensional point, you remove degrees of freedom, so the images
of @ independent pointsare required to completely determine a
projective transformation in projective -space.
13
-
8/3/2019 Homogeneous Coordinates and Computer Graphics
14/14
5
8
8
and
W I
@ H
@ H
Q R
The construction of
and
is obviously identical, so we will show the construction of
only.
We will denote the unknown entries in the matrix
by . As usual, we will also use as the arbitraryconstants in
that multiply the homogeneous coordinates of our result. The
matrix
must satisfy:
# ! "
% # "
! % $
0
5
2
(8)
There are thirteen variables including the nine and the four ,
of which we can x any one. We chooseto let
. We can actually perform the matrix multiplication on the left
of equation 8 and set
to obtain:
0
8
#
2
(9)
From equation 9, we can immediately conclude that
,
, and that
. Wedont yet know the values of except that
, but we can now rewrite equation 9 as:
e
8
8
8
"
5
8
8
(10)
The rst three columns of equation 10 dont help at all, but we
can re-write the fourth column as follows:
% "
5 8 8
(11)
We can solve equation 11 for the :
% "
5 8 8
H
(12)
Using the values of the obtained from equation 12 and
substituting those into the rst three columns of equation 9 we can
nd the unknown matrix
:
8
14