Embed Size (px)
Citation preview

1
Nonlinearly most unstable route tohigh-speed boundary-layer turbulence
Reza Jahanbakhshi1 and Tamer A. Zaki1†1Department of Mechanical Engineering, Johns Hopkins University
Baltimore, MD 21218-2682, USA
Laminar-to-turbulence transition in zero-pressure-gradient boundary layer at Mach4.5 is studied using direct numerical simulations. For a given level of total disturbanceenergy, the inflow spectra was designed to correspond to the nonlinearly most dangerouscondition that leads to the earliest possible transition Reynolds number. The synthesis ofthe inlet disturbance is formulated as a constrained optimization, where the control vectoris comprised of the amplitudes and relative phases of the inlet modes; the constraintsare the prescribed total energy and that the flow evolution satisfies the full nonlinearcompressible Navier-Stokes equations; the cost function is the average wall frictionwhich, once maximized, corresponds to the earliest possible transition location. Anensemble variational (EnVar) technique is developed to solve the optimization problem.EnVar updates the estimate of the control vector at the end of each iteration usingthe gradient of the cost function, which is computed from the outcome of an ensemble ofpossible solutions. Two inflow conditions are computed, each corresponding to a differentlevel of energy, and their spectra are contrasted: the lower energy case includes twonormal acoustic waves and one oblique vorticity perturbation, whereas the higher energycondition consists of oblique acoustic and vorticity waves. The focus is placed on theformer case because it can not be categorized as any of the classical breakdown scenarios,while the higher energy condition undergoes a typical second-mode oblique transition.At the lower energy level, the instability wave that initiates the rapid breakdown toturbulence is not present at the inlet plane. Instead, it appears at a downstream locationafter a series of nonlinear interactions that spur the fastest onset of turbulence. Theresults from the nonlinearly most potent inflow condition are also compared to otherinlet disturbances that are selected solely based on linear theory, and which all yieldrelatively delayed transition onset.
1. Introduction
The location and mechanism of laminar-to-turbulence transition in hypersonic bound-ary layers are sensitive to the flow environment. Linear theory provides criteria for theonset of exponential instability, and these primary waves subsequently undergo secondaryinstability and breakdown to turbulence. However, similar criteria for transition onset cannot be established theoretically because breakdown to turbulence is nonlinear. Nonlinearsimulations can predict the evolution of any inflow perturbation, although starting withthe linearly most unstable mode does not guarantee the earliest possible transitionlocation. And when the inflow perturbation is composed of multiple waves, the choiceof their relative amplitudes and phases can appreciably influence transition onset. Theseparameters are herein optimized using an ensemble variational (EnVar) algorithm in order
† Email address for correspondence: [email protected]
arX
iv:1
811.
1285
9v1
[ph
ysic
s.fl
u-dy
n] 3
0 N
ov 2
018

2 R. Jahanbakhshi and T.A. Zaki
to determine the earliest possible transition Reynolds number in zero-pressure-gradienthigh-speed boundary layer, for a specified level of energy of the inlet disturbance.
1.1. Transition in high-speed boundary layers
The precursors that ultimately lead to transition to turbulence in high-speed boundarylayers can be traced upstream to the early amplification of small-amplitude acoustic,entropic or vortical fluctuations (Leyva 2017). When their amplitudes are infinitesimal,these waves and their growth rates are accurately modelled by linear stability theory(LST) (Mack 1984). According to the theory, oblique first-mode instabilities, which aresimilar to the Tollmien-Schlichting waves at lower speeds, are most amplified in supersonicconditions. With increasing Mach number, however, two-dimensional acoustic instabilitywaves, which are commonly referred to as Mack’s (second-) modes (Mack 1984), playan increasingly important role. Secondary instability theory was also developed (Herbert1988) in order to examine how the state comprised of the mean-flow profile and theprimary instability will itself become unstable to new perturbations. In order to accountfor non-parallel effects on the amplification of instability waves, the linear parabolizedstability equations (PSE) were introduced by Bertolotti et al. (1992). In addition,when the disturbance amplitudes become appreciable, the nonlinear parabolized stabilityequations (Bertolotti et al. 1992; Chang & Malik 1994; Herbert 1997) can account fornonlinear modal interactions and the base-state distortion. The final stage of transition ismarked by the appearance of localized turbulence patches, or spots, which spread as theyare advected downstream. Intermittency, which is defined as the fraction of time thatthe flow at a given streamwise location is turbulent (Narasimha 1985), thus rises fromits initial value of zero in the laminar regime to unity where the spot merge to form afully turbulent boundary layer. Recent numerical and experimental studies have focusedon advancing our fundamental understanding of transition (see the reviews by Fedorov2011; Zhong & Wang 2012; Schneider 2015). A summary of select efforts is provided here,with the objective of highlighting transition mechanisms that are relevant to boundarylayers at free-stream Mach numbers larger than four.
A key determining factor of the transition mechanism, be that in simulations orin experiments, is the spectral makeup of the upstream disturbance. For example, innumerical simulations, this inflow disturbance must be specified, and changes in therelative amplitudes and phases of inflow waves can lead to quantitative and qualitativechanges in the transition process. Franko & Lele (2013, 2014) performed direct numericalsimulations of three transition mechanisms at Mach six, in zero- and adverse-pressure-gradient (ZPG and APG) boundary layers: first-mode oblique breakdown, second-modeoblique breakdown, and second-mode fundamental resonance. In all cases, the disturbancefrequencies and spanwise wavenumbers were chosen based on linear stability theory andeN method. They concluded that, for all of three mechanisms, APG increases the lineargrowth rates and promotes earlier breakdown to turbulence. Nonetheless, the nonlinearbreakdown of each of the three mechanisms was qualitatively similar for ZPG and APGconditions. Sivasubramanian & Fasel (2015, 2016) also preformed DNS of fundamentalresonance and of oblique breakdown in Mach 6 boundary layers on a sharp cone, with ahalf vertex angle equal to seven degree. A series of low-resolution simulations, informedby linear stability theory, were used to identify the instability waves that promoteearly transition. These waves are then used to performed fully resolved simulations.They reported that both second-mode fundamental and oblique breakdown lead tostrong nonlinear interactions, and are viable candidates to affect transition on the conegeometry. Novikov & Egorov (2016) performed a numerical study of laminar-turbulenttransition over a flat plate at Mach 5.37. In that effort, perturbations were introduced

Most unstable route to boundary-layer turbulence 3
into the boundary layer through a small round hole on the surface of the plate by forcedpulsations of the vertical velocity component. The authors reported that the linear stagesof transition are dominated by first-mode oblique waves, while second-mode plain wavesbecome dominant in nonlinear regions. Most recently, Zhao et al. (2018) studied theeffect of local wall heating and cooling on the stability of a flat-plate boundary layerat Mach 6. Their results revealed that the location of thermal treatment relative tothe synchronization point significantly affect the stability of a second-mode instability.These studies highlight the variety of transition mechanisms that can be explored usingnonlinear computations, and by varying the inflow condition.
In a Mach 6 wind tunnel, Zhang et al. (2013, 2015) and Zhu et al. (2016, 2018)investigated transition using Rayleigh-scattering visualization, fast-response pressuremeasurements, and particle image velocimetry. They found that the second-mode in-stability is a key modulator of the transition process, through the formation of high-frequency vortical waves and triggering a fast breakdown to turbulence. They alsoreported that the second-mode waves, accompanied by high-frequency alternating fluidcompression and expansion, produce intense aerodynamic heating in a small region.Casper et al. (2016) studied boundary-layer transition on a sharp seven-degree conein hypersonic wind tunnels at Mach five, six, eight, and fourteen. At the lowest Machnumber, transition was initiated by a combination of first- and second-mode instabilities,while at higher values the boundary layer was dominated by second-mode instabilities.Laurence et al. (2016) and Kennedy et al. (2018) also investigated transition on a slendercone at Mach 6-7 and Mach 14, respectively, using high-speed Schlieren visualizations.They specifically focused on formation and evolution of second-mode instabilities, andreported that the wave-packets form rope-like structures that become progressively moreinterwoven as transition develops. The experiments were performed for both low and high-enthalpy conditions, and highlighted the difference in the wall-normal distribution of thedisturbances in each condition. Despite laboratory experiments accounting for all stagesof transition fully, starting from receptivity through the development of the turbulentboundary layer, they do not necessarily reproduce the environmental disturbances ofhigh-altitude flight. As a result, flight experiments have been performed, and more than20 such tests were surveyed by Schneider (1999). The author noted the high cost of eachexperiment which often precludes repeating the tests. More recently, the HypersonicInternational Flight Research Experimentation (HIFiRE) program performed a seriesof tests to study transition scenarios on a cone in hypersonic flight (Juliano et al. 2015;Stanfield et al. 2015; Kimmel et al. 2018, see e.g.). The HIFiRE data show that, dependingon the flow condition and angle-of-attack, second-mode, crossflow, and separation inducedtransition are all potential causes of turbulence on different parts of the vehicle. It isimportant to note that only a limited amount of flight data on transition are availableand that in-flight environmental conditions are variable and uncertain.
1.2. The nonlinearly most dangerous disturbance
With a wealth of instability waves at hypersonic speeds, transition mechanisms innumerical simulations can vary quantitatively and qualitatively depending on the inflowdisturbance spectrum. Existing approaches synthesize the inflow as a superposition ofinstability waves that are often selected based on their growth rates or appearancein experiments. The former approach does not guarantee that these waves are themost dangerous with respect to the onset of nonlinear breakdown, and relative modalamplitudes and phases are not prescribed in a manner that exposes the most dangeroustransition scenario. When motivated by experimental observations, the choice of thecomputational inflow condition attempts to reproduce the instability waves that were

4 R. Jahanbakhshi and T.A. Zaki
experimentally measurable; precursor interactions that may have led to the generationof these modes may not be included. In addition, inflow conditions that are relevant toin-flight environments are often uncertain or unknown. These challenges motivate thepresent work and the question: how can we guarantee robust flow design in high-speedflows? The adopted approach is to determine, for a given level of disturbance energy,the nonlinearly most unstable inflow condition that will cause transition at the lowestpossible Reynolds number. No other inflow disturbance with the same energy can causeearlier breakdown to turbulence.
Compared to theory and nonlinear simulations of boundary-layer stability, studies ofnonlinearly most unstable disturbances in transitional flows are relatively recent (Pringle& Kerswell 2010; Cherubini et al. 2011; Rabin et al. 2012). The limited number of previousefforts all focused on incompressible flows; the present study is the first to consider high-speed flow. Another common feature in earlier efforts is the use of adjoint-variationaltechniques, which are commonly adopted in flow control (Bewley et al. 2001; Cherubiniet al. 2013; Luchini & Bottaro 2014; Xiao & Papadakis 2017), in order to optimize acontrol vector that is either the initial or inflow disturbance—the optimal value is thenonlinearly most dangerous disturbance. The two main ingredients of the algorithm area cost function whose optimality corresponds to the earliest transition location, anditerative numerical solution of the forward and adjoint equations to evaluate the localgradient of this cost function with respect to the control vector. One key advantage ofadjoint methods is that a forward-adjoint loop directly yields the local sensitivity ofthe cost function to the control vector. However, the adjoint approach has a number oflimitations that are relevant for the present purposes: Firstly, an accurate adjoint modelis required and is not always available, for example in the case of nonlinear parabolizedstability equations. Secondly, when the forward equations are nonlinear, the adjoint modeldepends on the time history of the forward state variables which must therefore bestored with full or high spatial and temporal resolution. Lastly, in chaotic systems itis very difficult to accurately satisfy the forward-adjoint duality relation over long timehorizons and, as a result, forward-adjoint loops are not guaranteed to provide accurateor convergent gradients of the cost function. As a result, previous efforts have often beenrestricted to short optimization horizons (e.g. Xiao & Papadakis 2017).
In order to avoid some of the limitations of adjoint-variational methods, we developan ensemble-variational (EnVar) algorithm to evaluate the nonlinearly most dangerousinflow disturbance. This technique does not require an adjoint solver and is there-fore applicable to any forward model, e.g. direct and large-eddy simulations, nonlinearPSE,...etc. In addition, absent the requirement of an adjoint, the difficulties associatedwith storage requirements and the stability of the adjoint integration are no longerrelevant. Applications of EnVar in fluid mechanics are recent, and are generally in thefield of data assimilation (Colburn et al. 2011; Suzuki 2012; Kato et al. 2015; Yang et al.2015; Mons et al. 2016; Gao et al. 2017). The current effort is the first to develop EnVarmethods for computing the nonlinearly most dangerous disturbance, and the first toexamine these disturbances in hypersonic boundary layers.
In §2, the governing equations and a detailed description of the EnVar algorithm arepresented. Section 3 provides a summary of the parameters of the numerical simulationsat the two levels of inflow energy. The nonlinearly most dangerous routes to turbulenceare discussed in detail in §4, and conclusions are provided in §5.

Most unstable route to boundary-layer turbulence 5
2. Theoretical formulation
The high-speed flow of a compressible fluid satisfies the Navier-Stokes equations,
∂ρ
∂t+∇. (ρu) = 0, (2.1a)
∂ρu
∂t+∇. (ρuu + pI− τ ) = 0, (2.1b)
and∂E
∂t+∇. (u [E + p] + θ − u.τ ) = 0, (2.1c)
where ρ is the density, u is the velocity vector, p is the pressure, I is the unit tensor,E = ρe+0.5ρu·u is the total energy, e is the specific internal energy, τ is the viscous stresstensor, and θ is the heat flux vector. To close the system of equations, the caloricallyperfect gas relations are used,
p = (γ − 1) ρe, (2.2a)
and
T =γ − 1
Re, (2.2b)
where T is the temperature, γ is the ratio of specific heats and R is the gas constant.Furthermore, the viscous stress tensor and the heat flux are defined as
τ = µs(∇u + (∇u)tr
)+
(µb −
2
3µs
)(∇.u)I, (2.3)
and
θ = −κ∇T, (2.4)
respectively, where µs is the dynamic shear viscosity, which is computed from the localtemperature via Sutherland’s law (Sutherland 1893), µb is the bulk viscosity, and κ is thethermal conductivity. The viscosity variables are related via Stokes’ hypothesis and thethermal conductivity is computed by assuming a constant Prandtl number and specificheat. We will refer to our Navier-Stokes solution algorithm, which is discussed later insection 3, in operator form as N .
The flow configuration is a zero-pressure-gradient boundary layer over a flat plate,and is shown schematically in figure 1. The computational domain starts downstream ofthe leading edge, and the inflow condition is a superposition of the compressible Blasiussolution and perturbations,
Φ = ΦB +ϕ′ (2.5)
where Φ =[ρ u v w T
]tris the inflow variables, the subscript B denotes Blasius
base-state, ϕ′ =[ρ′ u′ v′ w′ T ′
]tris the perturbations with respect to this base-
state, and the superscript tr denotes transpose. In the present work, the unknown is themost unstable disturbance vector, ϕ′, for a given level of initial energy.
2.1. Problem definition
The non-linearly most dangerous disturbance is defined as the inflow perturbations (i)with a prescribed amount of total energy; (ii) that satisfies the Navies-Stokes equations;(iii) and undergoes the fastest breakdown to turbulence. The first two elements of thedefinition are the constraints while the third is the objective. This problem can be cast

6 R. Jahanbakhshi and T.A. Zaki
Figure 1. Schematic of the computational domain for a zero-pressure-gradient transitionalboundary layer over a flat plate.
as a constrained optimization: find the control vector ϕ′ that optimizes the cost function
J (ϕ′) =1
2‖G (q) ‖2, (2.6a)
while satisfying the constraints
q = N (ϕ′) , (2.6b)
and
E (ϕ′) = E0, (2.6c)
where q is the state vector, G (q) is the observation vector that quantifies the breakdownto turbulence, N represents the Navier-Stokes solver, E is the energy operator, and E0
is the constrained energy. Choices of G (q) can be formulated based on the skin friction,wall temperature, heat flux, or perturbation energy. In the present work, the observation
vector is proportional to the skin-friction coefficient, G (q) = Cf (dx/Lx)12 .
The control vector is the inflow disturbance, which is expressed as a superposition ofinstability waves,
ϕ′ =∑n,m
Real{cn,mϕn,m(x0, y)ei(βmz−ωnt−θn,m)
}, (2.7)
where ωn and βm are the frequency and spanwise wave number, and ϕn,m is the complexmode shape which is obtained from solution of the Orr-Sommerfeld-Squire eigenvalueproblem. At each (n,m) pair, only the most unstable mode will be included at theinflow, which in the present study will be the slow mode (Fedorov 2011). The eigenmodeof each instability wave is normalized to unit energy,
1
2
∫ Ly
0
(ρ [u∗u+ v∗v + w∗w] +
R
γ − 1
[T
ρρ∗ρ+
ρ
TT ∗T
])n,m
dy = 1, (2.8)
where star denotes the complex conjugate. Assuming knowledge of the relevant range offrequencies and spanwise wave numbers, the only unknowns are the positive real-valuedmodal amplitudes cn,m and phases θn,m, which lead to the earliest transition locationdownstream. The control vector can then be redefined in terms of those two parameters,

Most unstable route to boundary-layer turbulence 7
c =[cn,m . . . θn,m . . .
]tr, (2.9)
and its size is 2M , or twice the total number of instability modes. In addition, the totalenergy of the perturbations is defined as
E (ϕ′) =1
2
∫ Ly
0
(ρ[u′2 + v′2 + w′2
]+
R
γ − 1
[T
ρρ′2 +
ρ
TT ′2])
dy, (2.10)
where overbar denotes averaging in time and the homogeneous spanwise direction. Interms of the new control vector, the perturbation energy (2.10) can be expressed as,
E (ϕ′) =1
2ctrA1c (2.11)
where
A1 =
[I OO O
]2M×2M
, (2.12)
and O and I are zero and identity matrices of size M × M , respectively. Now theconstrained optimization problem (2.6) can be rewritten as identifying c that optimizesthe cost function
J (c) =1
2‖G (q) ‖2, (2.13a)
while satisfying the constraints
q = N (c) , (2.13b)
1
2ctrA1c = E0, (2.13c)
and
A1c > 0. (2.13d)
The constraint (2.13d) is introduced because cn,m in equation (2.7) are real positivevalues. An ensemble-variational (EnVar) approach is adopted to solve the optimizationproblem (2.13).
2.2. Ensemble-variational optimization
The optimization problem (2.13) starts with an estimate, or guess, of the solution c(e).An ensemble of Nen variants, c(r) where r = 1, ..., Nen, is also constructed whose meanis equal to c(e). The optimal control vector is then expressed as the weighted sum,
c = c(e) + E′a. (2.14)
where E′ is the deviation of the ensemble members from their mean,
E′ =[c(1) − c(e) . . . c(r) − c(e) . . . c(Nen) − c(e)
]2M×Nen
, (2.15)
and a is the weight vector,
a =[a(1) . . . a(r) . . . a(Nen)
]tr. (2.16)
Since the mean c(e) and members c(r) of the ensemble are known, the control vectorbecomes the optimal weights a.
The optimization problem can be re-written in terms of the new control vector. Using

8 R. Jahanbakhshi and T.A. Zaki
equation 2.14, the energy constraint (2.13c) becomes,
1
2c(e)trA1c
(e) + c(e)trA1E′a +
1
2atrE′trA1E
′a = E0. (2.17)
Similarly, the inequality constraint (2.13d) is recast as,
A1c(e) + A1E
′a > 0. (2.18)
The details of constructing the ensemble members c(r) are provided in Appendix A. Theprocedure ensures the following three properties: (i) the mean of the ensemble members isc(e); (ii) each member and the mean satisfy the energy constraint, 1
2c(r)trA1c
(r) = E0 for
r = 1, . . . Nen and 12c
(e)trA1c(e) = E0; (iii) the deviations of the members from the mean
are controlled using a covariance matrix. It is important to note that the arithmetic meancan not satisfy (i) and (ii) simultaneously. Instead, the modal amplitudes and phases ofthe ensemble members and the mean control vector are related by, respectively,
A1c(e) ◦A1c
(e) =1
Nen
Nen∑r=1
A1c(r) ◦A1c
(r), (2.19a)
and
A2c(e) =
1
Nen
Nen∑r=1
A2c(r), (2.19b)
where ◦ is element-wise product of two vectors and
A2 =
[O OO I
]2M×2M
. (2.20)
The optimization procedure requires computation of the gradient of the cost functionwith respect to the control variable, and therefore J must be expressed as a differentiablefunction of a. First, the governing Navier-Stokes equations 2.13b are written in term ofthe new control vector,
q = N(c(e) + E′a
). (2.21)
The equation is expanded around the mean vector using Taylor series,
q = q(e) +∂N∂c
∣∣∣∣c(e)
E′a +1
2!
∂2N∂c2
∣∣∣∣c(e)
(E′a ◦E′a
)+ . . . , (2.22)
where q(e) = N(c(e)). By assuming the members of the ensemble are close to the mean,
or E′a is small, the high-order terms in equation (2.22) can be ignored,
q ≈ q(e) +∂N∂c
∣∣∣∣c(e)
E′a. (2.23)
Substituting equation (2.23) into (2.13a) and using Taylor series expansion, the costfunction is approximated as,
J (a) ≈ 1
2
∥∥∥∥G (q(e) +∂N∂c
∣∣∣∣c(e)
E′a
)∥∥∥∥2
≈ 1
2
∥∥∥∥∥G (q(e))
+∂G∂q
∣∣∣∣q(e)
∂N∂c
∣∣∣∣c(e)
E′a
∥∥∥∥∥2
. (2.24)
As long as the linear approximations in (2.23) and (2.24) are valid, constraint (2.13b) is
satisfied and the observation matrix H ≡ ∂G∂q
∣∣∣q(e)
∂N∂c
∣∣c(e) E
′ can be evaluated as,
H ≈[G(q(1)
)− G
(q(e)
). . . G
(q(Nen)
)− G
(q(e)
)]NG×Nen
, (2.25)

Most unstable route to boundary-layer turbulence 9
where NG is the size of observation vector. Note that the validity of (2.23) to (2.25) ispredicated on E′a being small — a condition that is ensured during the generation of theensemble members (Appendix A). Assembling matrix H is the most expensive part ofthe algorithm since it requires Nen+ 1 solutions of the governing equations. While in thecurrent study direct numerical simulations (DNS) are used to evaluate H, the derivationof (2.25) did not invoke any assumptions regarding the choice of the numerical approachto computing G
(q(r)
). As a result, other approaches such as large-eddy simulations and
the nonlinear PSE can potentially be adopted.
In summary, the constrained optimization (2.13) can be recast as seeking the weightvector a that optimizes the cost function,
J (a) ≈ 1
2
∥∥∥G (q(e))
+ Ha∥∥∥2
, (2.26a)
while satisfying the constraints
1
2c(e)trA1c
(e) + c(e)trA1E′a +
1
2atrE′trA1E
′a− E0 = 0, (2.26b)
and
−A2E′a 6 A2c
(e). (2.26c)
Interior-point method (Nocedal & Wright 2006; Wachter & Biegler 2006) is used tosolve (2.26) by generating iterates that satisfy the inequality bounds, strictly. The fullprocedure to solve the optimization problem, and hence identify the nonlinearly mostdangerous disturbance, is shown in algorithm 1.
Algorithm 1: Finding the nonlinearly most dangerous perturbation using anensemble-variational optimization technique.
• Iteration = 0 ;
• Establish a first guess for the control vector, c(e), that satisfies the constraints;
• Simulate the evolution of the mean control vector, q(e) = N(c(e));
• Compute the mean observation vector G(q(e)
);
while The convergence condition is not satisfied do• Construct an ensemble of c(r) that satisfy the constraints (see Appendix A);• Compute the deviation matrix E′ (equation 2.15);
• Simulate the evolution of each ensemble member, q(r) = N(c(r));
• Compute the observation vectors of the members of the ensemble G(q(r)
);
• Compute the observation matrix H (equation 2.25);• Solve the constrained optimization (2.26) using interior-point method;
• Update the mean control vector as c(e) → c(e) + E′a;
• Simulate the evolution of the mean control vector, q(e) = N(c(e));
• Compute the mean observation vector G(q(e)
);
• Check for convergence;• Iteration = Iteration + 1 ;
end

10 R. Jahanbakhshi and T.A. Zaki
Case Ma∞√
Rex0 Lx Ly Lz Nx Ny Nz Ls,x Ls,y E0 × 105 Fl Fu kz,l kz,u
E1 4.5 1800 2983.5 200 150 1989 130 108 250 30 2 10 250 0 15E2 4.5 1800 2983.5 200 150 1989 130 108 250 30 100 10 250 0 15
Table 1. Physical and computational parameters for the cases of the present study.
3. Computational aspects
During the search for the nonlinearly most dangerous inflow disturbance, the optimiza-tion algorithm involves the solution of the Navier-Stokes equations for every ensemblemember and observation of the wall friction. The simulations are performed using codeHybrid (Johnsen et al. 2010), which solves the compressible Navier-Stokes equations (2.1)on a structured grid and is designed for accurate simulations of high-speed transitionaland fully turbulent flows. It is nominally free of numerical dissipation, which is importantfor accurate prediction of the evolution of instability waves and transition onset. Thetime advancement is 4th order accurate using the Runge−Kutta scheme, and the spatialdiscretization in absence of shocks is 6th order central with a split form which improvesnonlinear stability, and a 5th order WENO scheme with Roe flux-splitting is used nearshocks. A more detailed description of the numerical methods used in Hybrid is providedin Johnsen et al. (2010).
A schematic of the simulated domain is shown in figure 1. The boundary conditionsare periodic in the spanwise (z) direction, while characteristic conditions are adopted onthe remaining four boundaries in the streamwise (x) and wall-normal (y) directions. Asindicated in the figure, sponge regions are used along the outflow boundaries to minimizereflections of disturbances back into the computational domain. Along these layers, arelaxation term is added to the governing equations to force the solution towards thespanwise average at each time step.
Two cases are examined to highlight the effect of the energy level on the nonlinearlymost dangerous inflow perturbations. Table 1 summarizes the computational and physicalparameters of each case, which are identical except for the inflow disturbance energy.The free-stream values are adopted as reference scales for normalization of velocity,temperature, density, viscosity, specific heat and conductivity. The reference length isthe Blasius length-scale, (µ∞x0/ρ∞U∞)1/2, at the inlet location, where the . representsdimensional quantities and x0 is the start location of the simulation relative to the virtualboundary-layer origin.
The free-stream Mach number in all simulations is Ma∞ = 4.5. The Reynolds numberbased on inlet is Rex0
and the streamwise position of the inflow plane is x0 =√
Rex0=
1800, which was selected based on the transition Reynolds numbers in high-altitudeflight tests being
√Rex,tr > 2000 for Ma∞ > 4 (Harvey 1978; Schneider 1999). Starting
the simulations from smaller Reynolds numbers requires a much longer domain size,which poses prohibitively high computational requirements. The lengths of computationaldomain in x, y, and z−directions are Lx, Ly and Lz, with grid points Nx, Ny and Nz. Thecomputational grid is uniform in x and z−directions, and a hyperbolic tangent stretchingis used in y−direction. The sizes of the sponge layers in x and y are denoted Ls,x andLs,y.
The two cases, E1 and E2, are distinguished by the total disturbance energy atthe inflow plane, E0, which is prescribed as a constraint in the optimization problem

Most unstable route to boundary-layer turbulence 11
0 500 1000 1500 2000 2500 3000 3500 4000 45000
50
100
150
200
250
300
350
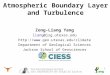
Figure 2. Neutral Curves of a zero-pressure-gradient boundary layer at Ma = 4.5. The valuesmarked on the curves correspond to the normalized spanwise wave number, b = β√
Rex× 103.
(constraint 2.26b). Comparison of E1 and E2 highlights the effect of the energy constrainon the spectral makeup of the nonlinearly most unstable inflow perturbation, and theassociated transition mechanism. The amount of energy for case E1 is chosen to be of thesame order as the turbulence kinetic energy in stratospheric layers, measured during arecent experimental campaign by Haack et al. (2014) with the balloon-borne instrumentLeibniz Institute Turbulence Observations in the Stratosphere (LITOS). The normalizedfrequencies of the disturbance (2.7) are assumed to range from Fl to Fu with an increment∆F = Fl = 10, where
F =ωn√Rex0
× 106 = nFl for n = 1, 2, . . . ,FuFl. (3.1)
Similarly, kz,l and kz,u in table 1 are the lower and upper bounds of the integer spanwisewavenumbers of the inflow disturbance, where
kz =βmLz
2π= m for m = kz,l, . . . , kz,u. (3.2)
For the three-dimensional modes at the inlet, kz > 0, the modal energy is divided equallybetween the positive and negative spanwise wave-numbers, ±βm, with the same phaseθn,m in equation (2.7). Therefore, hereafter only kz > 0 will be reported since they arerepresentative of the pairs of oblique modes. The operating gas is air and the free-streamtemperature used in Sutherland’s law is 65.15 Kelvin.
Figure 2 shows the neutral curves from linear spatial stability analysis of a zero-pressure-gradient boundary layer at Ma∞ = 4.5. The lower unstable regions in the figureare commonly referred to as (Mack’s) first-mode instability regions, whereas the upperunstable regions are called (Mack’s) second-mode disturbances (Mack 1984). The rangesof F and kz in table 1 are appropriately selected such that they include all the relevantfrequencies and spanwise wave numbers at the inlet location. For every pair of frequencyand spanwise wavenumber, the most unstable discrete mode in the Orr-Sommerfeld andSquire spectra is included; these instabilities correspond to slow modes (Fedorov 2011).

12 R. Jahanbakhshi and T.A. Zaki
1800 2000 2200 2400 2600 28000
0.5
1
1.5
2
10 -3
0 1 2 3 4 5 6 7 8 9 10 110
5
10
15(a)
1800 2000 2200 2400 2600 28000
0.5
1
1.5
210 -3
0 1 2 3 4 5 6 7 81
1.2
1.4
1.6(b)
Figure 3. Cf (left) and normalized cost function (right) for cases (a) E1 and (b) E2. In theCf plots, the dashed green profiles correspond to the initial guess, and thin to thick (also lightto dark coloured) solid lines represent the result for the mean control vector after consecutiveiterations. The dashed-dotted blue curves correspond to the nonlinearly most unstable inflowspectra for each case (see table 2).
4. Results and discussions
4.1. Nonlinearly most unstable inflow spectra
The optimization algorithm 1 seeks the nonlinearly most unstable disturbance bymaximizing the cost-function J = 1
2‖G(q)‖2 = 12Lx
∫ xfx0
C2fdx where,
Cf =τwall
12ρ∞U
2∞. (4.1)
The initial guess of the disturbance spectra was equipartition of the energy among allinstability waves and randomly assigned phases. In addition to the mean, twenty ensemblemembers were used in each iteration. The stopping criterion of the optimization was(Ji − Ji−1)/Ji < 10−3, where i is the iteration number.
For each iteration, both Cf and J /J0 associated with the mean control vector c(e) areplotted in figure 3. For case E1, the flow remains laminar throughout the computationaldomain for the initial guess and first iteration. As a result, the Cf curves of these twoinflow perturbations nearly coincide and, while (J1 − J0)/J1 ≈ 9.99 × 10−4 < 10−3,further iterations are performed. The convergence rate of the optimization algorithmis highly dependent on the observation matrix, defined in equation (2.25). Figure 3ashows that the convergence rate of the algorithm for case E1 is slow during the firsttwo iterations. This is due to the fact that the observation matrix formed by the skinfriction profiles is close to a singular matrix for these two iterations. Generally, transitionto turbulence advances upstream with successive iterations, with convergence observedfor both E1 and E2. For E1, transition location is nearly unchanged from the tenth tothe eleventh iteration, and for case E2 a similar behaviour is observed from the seventhto eighth iteration.
The choice of cost function in algorithm 1 is not unique. Depending on the applicationof interest, measures based on the total energy of the perturbations within the domain orthe wall temperature could have been adopted. Every new cost function, however, requires

Most unstable route to boundary-layer turbulence 13
1800 2000 2200 2400 2600 2800
10 -5
10 -4
10 -3
10 -2
10 -1
10 0
0 1 2 3 4 5 6 7 8 9 10 1110 0
10 1
10 2
10 3(a)
1800 2000 2200 2400 2600 2800
10 -3
10 -2
10 -1
10 0
0 1 2 3 4 5 6 7 81
1.2
1.4
1.6(b)
Figure 4. E curves (left plots) and the value of the norm function (right plots), computed asME = 1
Lx
∫ xfx0Edx, corresponding to cases (a) E1 and (b) E2. In the E plots, the dashed green
profiles correspond to the initial guess (iteration # 0 in algorithm 1), thin to thick (also light todark coloured) solid lines represent the optimal solutions after consecutive iterations, and thedashed-dotted blue profiles correspond to the nonlinearly most unstable inflow spectra for eachcase (the spectra in table 2).
repeating the entire optimization procedure, which is not performed here. Instead, foreach iterate of the optimization where the cost function was proportional to skin friction,the average integrated energy and the average wall temperature were recorded and areplotted in figures 4 and 5. Note that in figure 4, the energy E is computed from equation(2.10) with fluctuations evaluated relative to a laminar solution over the entire plate.As a result, a base-state distortion term with frequency and spanwise wavenumber 〈0, 0〉contributes to the perturbation energy.
The streamwise integrals of the energy and wall temperature are also plotted in figures4 and 5, normalized by their values from the initial guess. Note, however, that thesenorms were not used in an optimization procedure. The normalized integral of the energy,ME/ME,0, increases with every iteration for both inflow perturbation levels.
Comparison of figures 4 and 3 highlights the rationale for choosing Cf for the definitionof the cost function. The increase in the perturbation energy takes place throughout thedomain, initially through the amplification of primary instabilities, subsequent secondaryinstabilities and ultimately breakdown to turbulence if it takes place within the domain.For case E1, the initial guess yields an increasing perturbation energy even though theflow is laminar throughout the computational domain; the second iterate too yields alaminar solution, even though its energy norm is higher. Therefore, using E as theobservation vector may not in theory guarantee the fastest breakdown to turbulence,although in practice it is effective (Pringle & Kerswell 2010). In contrast, the skin-friction curve reproduces the laminar behaviour throughout the pre-transitional regionand only increases towards the turbulent correlation when intermittency is finite, whereintermittency is the fraction of time that the flow is turbulent. As a result, a costfunction based on Cf only shows appreciable increase in case E1 when the flow undergoestransition to turbulence. In addition, increasing the cost function based on Cf is directly

14 R. Jahanbakhshi and T.A. Zaki
1800 2000 2200 2400 2600 28004.4
4.5
4.6
4.7
4.8
0 1 2 3 4 5 6 7 8 9 10 111
1.01
1.02(a)
1800 2000 2200 2400 2600 28004.4
4.5
4.6
4.7
4.8
0 1 2 3 4 5 6 7 81
1.01
1.02(b)
Figure 5. Twall curves (left plots) and the value of the norm function (right plots), computed
as MTwall= 1
Lx
∫ xfx0
Twalldx, corresponding to cases (a) E1 and (b) E2. In the Twall plots,
the dashed green profiles correspond to the initial guess (iteration # 0 in algorithm 1), thin tothick (also light to dark coloured) solid lines represent the optimal solutions after consecutiveiterations, and the dashed-dotted blue profiles correspond to the nonlinearly most unstableinflow spectra for each case (the spectra in table 2).
tied to generation of turbulence early upstream, unlike a cost function based on theperturbation energy that includes contributions from laminar disturbances.
The average wall temperature is plotted versus downstream Reynolds number in figure5, along with the associated normalized norm at each iterate and for both levels of theinflow perturbation energy. The figure shows that, while a cost function based on skinfriction promotes early breakdown to turbulence, it does not guarantee that the normof the wall temperature is highest. Based on actual temperature profiles, while a costfunction based on skin friction promotes early breakdown to turbulence, it does notguarantee that the peak temperature in the transition zone is largest. In addition, itdoes not guarantee that the temperature norm is highest at convergence either. Theseresult optimizations for minimizing losses and for robust thermal design in hypersonicapplications might not necessarily lead to the same outcome; an appropriate cost functionmust be adopted for each choice and the results compared.
The focus is hereafter placed on the results from the optimization algorithm, wherethe cost function is defined using the wall friction. Figure 6 shows the energy spectra ofthe optimal inflow disturbances,
E〈F,kz〉 =1
2
∫ Ly
0
ψ∗〈F,kz〉diag (ξ) ψ〈F,kz〉dy, (4.2)
where ψ〈F,kz〉 are the two-dimensional Fourier coefficients of the perturbation vector ψ′ ≡[ρ′ u′ v′ w′ T ′
]tr, the subscripts correspond to the frequency F ≡ 106 ω/
√Rex0
and integer spanwise wavenumber kz ≡ β/ (2π/Lz), and ψ∗
is the complex-conjugate
transpose. In (4.2), the term ξ =[Rγ−1
Tρ ρ ρ ρ R
γ−1ρ
T
]trensures that the kinetic

Most unstable route to boundary-layer turbulence 15
10 40 70 100 130 160 190 220 250
0
2
4
6
8
10
12
14
-9
-8
-7
-6
-5
10 40 70 100 130 160 190 220 250
0
2
4
6
8
10
12
14
-7
-6
-5
-4
-3(a) (b)
Figure 6. The energy distribution amongst the instability modes at the inflow correspondingto the optimal solutions after the final iteration for cases (a) E1 and (b) E2.
and internal energy are appropriately weighted; note that overline in ξ denotes thelaminar state.
For case E1 (figure 6a), most of the available energy is allocated to modes 〈40, 3〉,〈100, 0〉 and 〈110, 0〉. The energy ratio among these modes is (1.66 : 1.18 : 1). The down-stream evolution of the spectra for all 400 instability waves that comprise the optimalperturbation was evaluated from the direct numerical simulations data (not shown),which confirmed that the three identified modes are indeed the most important instabilitywaves at the inlet. Collectively they are responsible for the earliest transition to turbu-lence for case E1. In order to verify this assertion, a few test cases were performed withvariations to the inlet spectra that were motivated by figure 6a and also by analysis ofthe downstream development of instability waves. All tests confirmed that a disturbancecomprised of mode 〈40, 3〉 with 43% of total energy, mode 〈100, 0〉 with 31% of totalenergy, and mode 〈110, 0〉 with 26% of total energy is the most potent inflow spectra forcase E1. This reduced form of the disturbance is reported in table 2, and will be referredto as E1N, and is examined in detail in §4.2. The associated skin-friction coefficient isreported in figure 3a (dashed blue line).
The spectra of case E2 at convergence of the optimization algorithm is reported infigure 6b: most of the available energy is in modes 〈50, 6〉 and 〈110, 1〉. The ratio oftheir energy content is (1 : 2.17). Similar to E1, the downstream evolution of the spectrafor E2 was computed from direct numerical simulation data, for all the 400 wavenumberpairs at the inflow and which can potentially be excited downstream (not shown). Carefulassessment of the spectra indicated that modes 〈50, 6〉 and 〈110, 1〉 are the most importantelements of the inflow spectra, and are responsible for the earliest transition to turbulencefor case E2. This conclusion was verified using several additional simulations where theinflow spectra was modified and transition location was compared to the optimal. Inone of the tests, the spanwise size of the domain was doubled and the energy of mode〈110, 1〉 was reassigned to mode
⟨110, 1
2
⟩in order to ensure that the width of the domain
did not influence the outcome of the optimization procedure. All tests confirmed that aninflow disturbance spectra composed of modes 〈50, 6〉 and 〈110, 1〉 with 32% and 68% oftotal energy, respectively, is the most potent inflow spectra for case E2. The skin-frictioncoefficient associated with this disturbance is reported in figure 3b by the dashed blueline. It will be designated E2N in table 2, and a detailed description of its transitionmechanism is discussed in §4.2.
The mode shapes that play an important role in cases E1N and E2N are plotted infigures 7 and 8, respectively. As the p profiles in figures 7 and 8 indicate, modes 〈110, 0〉,〈100, 0〉 and 〈110, 1〉 with one zero crossing of real(p) in the wall normal direction are theso-called second-mode instabilities (Mack 1984). These are generally sound (acoustic)waves that reflect back and forth between the wall and the sonic line of the relative flow.

16 R. Jahanbakhshi and T.A. Zaki
Case E0 × 105 Inlet’s modes E〈F,kz〉 × E−10 θ〈F,kz〉 × π
−1
E1N 2〈40, 3〉〈100, 0〉〈110, 0〉
0.430.310.26
0.090.000.12
E2N 100〈50, 6〉〈110, 1〉
0.320.68
0.000.02
E1L1 2〈100, 0〉
broadband0.990.01
randomly assigned
E1L2 2〈90, 0〉
broadband0.990.01
randomly assigned
E1L3 2〈20, 2〉
broadband0.990.01
randomly assigned
E2L 100〈110, 0〉
broadband0.990.01
randomly assigned
Table 2. E1N and E2N are the nonlinearly most unstable inflow spectra for the cases of thepresent study. E1L1, E1L2, E1L3 and E2L are the linearly most unstable inflow spectra for thecases examined here. The numbers in the brackets correspond to 〈F, kz〉.
-0.5 -0.25 0 0.25 0.50
1
2
3
-0.3 -0.15 0 0.15 0.30
1
2
3
-0.3 -0.15 0 0.15 0.30
1
2
3
-0.06 -0.03 0 0.03 0.060
1
2
3
-4 -2 0 2 40
1
2
3(a)
-0.5 -0.25 0 0.25 0.50
1
2
3
-0.3 -0.15 0 0.15 0.30
1
2
3
-0.3 -0.15 0 0.15 0.30
1
2
3
-0.06 -0.03 0 0.03 0.060
1
2
3
-4 -2 0 2 40
1
2
3(b)
-0.5 -0.25 0 0.25 0.50
1
2
3
-0.3 -0.15 0 0.15 0.30
1
2
3
-0.3 -0.15 0 0.15 0.30
1
2
3
-0.06 -0.03 0 0.03 0.060
1
2
3
-4 -2 0 2 40
1
2
3(c)
Figure 7. The mode shapes of the insatiability waves of case E1N at the inlet,√
Rex = 1800.(a) mode 〈110, 0〉, (b) mode 〈100, 0〉, and (c) mode 〈40, 3〉. The solid, dashed-dotted, dotted linesare the magnitude, real part, and imaginary part of the mode shapes respectively.
Modes 〈40, 3〉 and 〈50, 6〉 are first-mode instabilities which for Ma∞ < 5 are vorticitywaves that can cause strong inflectional instability.
Depending on the wavelength of the modes and the local boundary-layer thickness, thegrowth rate of the acoustic waves can be much larger than the typical vorticity modes. Itis also evident in figures 7 and 8 that, while the second-mode instabilities are large across

Most unstable route to boundary-layer turbulence 17
-0.5 -0.25 0 0.25 0.50
1
2
3
-0.3 -0.15 0 0.15 0.30
1
2
3
-0.3 -0.15 0 0.15 0.30
1
2
3
-0.06 -0.03 0 0.03 0.060
1
2
3
-4 -2 0 2 40
1
2
3(a)
-0.5 -0.25 0 0.25 0.50
1
2
3
-0.3 -0.15 0 0.15 0.30
1
2
3
-0.3 -0.15 0 0.15 0.30
1
2
3
-0.06 -0.03 0 0.03 0.060
1
2
3
-4 -2 0 2 40
1
2
3(b)
Figure 8. The mode shapes of the insatiability waves of case E2N at the inlet,√
Rex = 1800. (a)mode 〈110, 1〉, and (b) mode 〈50, 6〉. The solid, dashed-dotted, dotted lines are the magnitude,real part, and imaginary part of the mode shapes respectively.
the boundary layer, the first-mode instabilities have appreciable magnitude only close toits edge. These observations have important implications on the mechanism of transi-tion to turbulence in cases E1N and E2N. For instance, a commonly observed featurein hypersonic and supersonic boundary-layer transition is the generation of elongatedstreaks from the nonlinear interaction of oblique instability waves (Sivasubramanian &Fasel 2016; Franko & Lele 2013; Mayer et al. 2011; Jiang et al. 2006; Thumm et al. 1990).Since streaks are the boundary-layer response to vortical forcing by three-dimensionalmodes, they are anticipated in case E2N in response to mode 〈110, 1〉. Also note that mode〈110, 1〉 has strong wall-normal perturbation which is essential for the lift-up process thatleads to the streak response (Zaki & Durbin 2006, 2005).
4.2. Transition mechanisms
In this section we discuss the two transition mechanisms due to the nonlinearly mostunstable inflow spectra for cases E1N and E2N (table 2), respectively. In the former case,the inflow is comprised of a pair of two-dimensional second-mode disturbances and anoblique first-mode instability wave. We will demonstrate that the resulting breakdownto turbulence can not be categorized as fundamental and/or oblique, and is hence anew mechanism. Focus will therefore be placed on this case. At the higher energy level,transition follows a typical second-mode oblique breakdown which will be summarized.
The downstream evolution of E〈F,kz〉 of modes that play a principal role in transitionwas evaluated using (4.2) and is plotted in figure 9 and 11. For clarity, the curves becomethin and faint coloured beyond the location where their interactions are discussed. Figures9 and 11 also include instantaneous iso-surfaces of streamwise velocity u coloured by itsfluctuation u′. The bottom panels in both figures feature the downstream evolution ofintegrated terms in the turbulence kinetic energy (TKE) equation,
1
2
∂ρu′′i u′′i
∂t+
1
2
∂ujfρu′′i u
′′i
∂xj︸ ︷︷ ︸Dk/Dt
= −ρu′′i u′′j∂ui
f
∂xj︸ ︷︷ ︸P
−τ ′ij∂u′′i∂xj︸ ︷︷ ︸ε
−1
2
∂ρu′′i u′′i u′′j
∂xj︸ ︷︷ ︸T1
−∂p′u′iδij∂xj︸ ︷︷ ︸T2
+∂τ ′iju
′′i
∂xj︸ ︷︷ ︸T3
+ p′∂u′′i∂xi︸ ︷︷ ︸Π
+u′′i∂τij∂xj︸ ︷︷ ︸Σ1
−u′′i∂p
∂xi︸ ︷︷ ︸Σ2
. (4.3)

18 R. Jahanbakhshi and T.A. Zaki
1800 1900 2000 2100 2200 2300 2400 2500 2600 2700 280010 -7
10 -6
10 -5
10 -4
10 -3
10 -2
10 -1(a)
(b)
(c)
(d)
2300 2400 2500 2600 2700
-4
0
4
810 -4
(e)
Figure 9. Results corresponding to case E1N: (a) fluctuations’ energy content for selectedinstability modes, E〈F,kz〉, versus the streamwise coordinate. F is the normalized frequency andkz is the integer spanwise wave number, defined in Eqs. 3.1 and 3.2. (b, c, d) Instantaneousiso-surfaces of streamwise velocity component, (b) u = 0.9, (c) u = 0.6 and (d) u = 0.3, coloruedby the streamwise velocity fluctuations u′. (e) The turbulent-kinetic-energy transport termsintegrated in wall-normal direction along the transition zone.

Most unstable route to boundary-layer turbulence 19
For an arbitrary quantity X , the Reynolds average is denoted by X , the Favre (density-
weighted) average is identified by X f , and fluctuations with respect to the Reynoldsand Favre averages are marked as X ′ and X ′′, respectively. The terms on the right-handside of (4.3) correspond to production rate P , dissipation rate ε, transport by velocityfluctuations T1, transport by pressure fluctuation T2, transport by viscous diffusion T3,pressure dilatation (pressure-strain) Π, viscous mass flux coupling Σ1, and pressure massflux coupling Σ2.
In case E1N, transition involves a series of instability waves that are activated at variousdownstream locations (figure 9a): the inflow modes amplify first and, downstream, spurother instabilities which were not prominently featured in the inlet condition. Specifically,the inlet pair 〈100, 0〉 and〈110, 0〉 activate mode 〈10, 0〉—an interaction that we willdenote I(1). The resulting mode 〈10, 0〉 is manifest as a low-frequency modulation ofthe near-wall waves in panel 9d. In a subsequent interaction I(2), the pair 〈40, 3〉 and〈110, 0〉 give rise to mode 〈70, 3〉, which is visible in panel 9b near
√Rex = 2300. The next
interactions I(3) involves the newly formed three-dimensional mode and the inflow wave〈100, 0〉. It spurs the instability 〈30, 3〉 which grows at the highest rate, is evident in panel9b in the range 2400 <
√Rex < 2550, and is the seat of breakdown to turbulence (also see
movie # 1 in the supplementary material). Note that a triad I(4) is established betweenthe first two nonlinearly generated waves, 〈10, 0〉 and 〈40, 3〉, and the fastest amplifyinginstability 〈30, 3〉. Flow structures resembling an interweaving rope-shaped waves evolvefar from the wall prior to breakdown to turbulence in movie # 1, and bear resemblanceto those observed experimentally in second-mode transition at Mach 5-8 (Casper et al.2016; Laurence et al. 2016).
Streaks feature in the instantaneous field (figures 9c-d). In the spectra, they correspondto mode 〈0, 6〉, which can be generated by the nonlinear interaction of modes 〈±F, 3〉;their spanwise size is approximately equal to the thickness of boundary layer at
√Rex ≈
2550. The energy of the streaks, or mode 〈0, 6〉, shadows that of mode 〈30, 3〉 which wasdiscussed in connection with the outer Λ-shaped structure and breakdown to turbulence.The breakdown of the streaks follows almost immediately after that of the outer Λ’s.
The interactions I described above can only be hypothesized based on the spectra. Forexample, whether the streaks 〈0, 6〉 are due to the self interactions of 〈±30, 3〉, 〈±40, 3〉 or〈±70, 3〉 can not be conclusively determined; the similarity between 〈±30, 3〉 and 〈±0, 6〉suggests a connection but does not guarantee it. In order to quantify the nonlinearinteractions, we compute the energy transfer terms among wavenumber triads. Startingfrom T1 in (4.3), the following expression for I can be derived (see Appendix B fordetails),
I〈F,kz〉 =
∫ Ly
0
∣∣∣A∗〈F1,kz,1〉F 〈F2,kz,2〉
∣∣∣ dy (4.4)
where F = F1 ± F2 and kz = kz,1 ± kz,2. In equation (4.4), A and F are vector
quantities containing the Fourier coefficients of A =[ρu′′u′′ ρu′′v′′ ρu′′w′′
]trand of
F =[u′′ v′′ w′′
]tr. The quantity I〈F,kz〉 thus represents the nonlinear energy transfer
among modes 〈F, kz〉, 〈F1, kz,1〉 and 〈F2, kz,2〉 (Cheung & Zaki 2010). Since I〈F,kz〉 isindependent of the ordering of modes within the triad, it only measures the energytransfer among the three modes but not the direction of the transfer.
In case E1N, nonlinear interactions feature prominently and, therefore, I〈F,kz〉 for theseven most important interactions is plotted in figure 10. Note that the designation〈F1, kz,1〉 + 〈F2, kz,2〉 ⇒ 〈F, kz〉 in the figure is only intended to identify the triad, andbears no physical significance. However, together with the energy spectra, I〈F,kz〉 can

20 R. Jahanbakhshi and T.A. Zaki
1800 1900 2000 2100 2200 2300 2400 2500 2600 2700 280010 -10
10 -9
10 -8
10 -7
10 -6
10 -5
10 -4
10 -3
Figure 10. The modal nonlinear energy transfer coefficient, defined in (4.4), computed for themost important modal interactions corresponding to transition scenario of case E1N.
provide a clearer view of the nonlinear interactions that spur new instability waves. Theinteraction I(1) takes place between inflow modes 〈100, 0〉 and 〈110, 0〉 and generates〈10, 0〉. Similarly, I(2) takes place between inlet modes 〈40, 3〉 and 〈110, 0〉 and givesrise to 〈70, 3〉. This emergent mode has a strong interaction I(3) with 〈100, 0〉 and leadsto 〈30, 3〉 which amplifies at the highest rate. Note also that near
√Rex = 2300, this
interaction is overtaken by another triad, I(4), that involves 〈30, 3〉. The source of thestreaks 〈0, 6〉 is not a single interaction, but rather three I(5,6,7), and each of them isdominant in a region of the streamwise length. While 〈0, 6〉 shadows 〈30, 3〉 in the spectra,I(7) is only the final interaction that becomes dominant as mode 〈30, 3〉 becomes mostenergetic.
The role of every interaction, including those that precede the amplification of 〈30, 3〉,can not be discounted. We performed exhaustive tests that involved assigning a significantportion of the inflow energy to mode 〈30, 3〉 but transition was delayed. Thus, allthe events, including nonlinear interactions and base-flow distortion, that precede theformation of this mode must take place for transition to set in as upstream as recordedin our simulations.
Terms in the TKE equation are shown versus downstream Reynolds number in figure9e. Three regions can be distinguished, based on the behaviour of the rate of productionP , which represents the energy exchange between the base state and the instabilitywaves. (i) In the range 2400 <
√Rex < 2500, the production increases faster than
dissipation; In this region, the instability wave 〈30, 3〉 dominates the spectra and reachessaturation. (ii) In the region 2500 <
√Rex < 2550, the rate of production increases
as the secondary instability sets in and leads to the formation of the Λ-structures andtheir local breakdown. (iii) Finally, in the range 2550 <
√Rex < 2650, the flow starts to
approach the statistical state of a fully turbulent boundary layer.The transition scenario for case E2N is of different ilk. Figure 11a captures the fast
emergence and amplification of a streamwise elongated streak mode, 〈0, 2〉. This wavebecomes the seat of secondary instability and onset of turbulence. Its instantaneous formis evident in the visualization of the streamwise velocity iso-surfaces (panels b-d). The

Most unstable route to boundary-layer turbulence 21
1800 1900 2000 2100 2200 2300 2400 2500 2600 2700 280010 -7
10 -6
10 -5
10 -4
10 -3
10 -2
10 -1(a)
(b)
(c)
(d)
1900 2000 2100 2200 2300
-4
0
4
810 -4
(e)
Figure 11. Results corresponding to case E2N: (a) fluctuations’ energy content for selectedinstability modes, E〈F,kz〉, versus the streamwise coordinate. F is the normalized frequency andkz is the integer spanwise wave number, defined in Eqs. 3.1 and 3.2. (b, c, d) Instantaneousiso-surfaces of streamwise velocity component, (b) u = 0.9, (c) u = 0.6 and (d) u = 0.3, colouredby the streamwise velocity fluctuations u′. (e) The turbulent-kinetic-energy transport termsintegrated in wall-normal direction along the transition zone.

22 R. Jahanbakhshi and T.A. Zaki
spanwise size of the structure is approximately 3 times the thickness of boundary layerat√
Rex ≈ 2250, which is the location where the flow has reached a fully turbulentstate. Similar sizes of streaks were reported in transition at Ma∞ = 6 (Franko & Lele2013) and also at Ma∞ = 3 (Mayer et al. 2011). The streak 〈0, 2〉 is generated by themode 〈110, 1〉, which initially amplifies linearly and reaches saturation around
√Rex ≈
2000—the location where the Cf curve starts to rise (c.f. figure 3b). At this stage, themode 〈50, 6〉 starts to amplify, and reaches its highest energy level at
√Rex ≈ 2100. In
the instantaneous realization, it appears to effect the secondary instability of the streakmode 〈0, 2〉, which meanders and breaks down to turbulence (figure 11b-d and movie #2 in the supplementary material). The early stages of transition in movie # 2 involvethe alternation of light and dark regions near the wall without any visible structures atthe edge of the boundary layer. This process is very different from the appearance ofrope-like structures in movie # 1 for case E1N. A change in the transition mechanismwith inflow disturbance energy is consistent with previous experiments, e.g. at high andlow enthalpy conditions at Mach 6-7 (Laurence et al. 2016).
We can further examine the transition zone of case E2N by considering the evolution ofterms in the TKE equation in various subregions (figure 11e). In a similar manner to thediscussion of case E1N, three regions can be identified: (i) In the range 2000 <
√Rex <
2100, the increase in the rate of production, P , is moderate but P itself exceeds theintegrated ε. The energy of the streaks overtake all other modes at the start of this region,and their secondary instability is amplifying. (ii) In the region 2100 <
√Rex < 2200,
the secondary instability 〈50, 6〉 is nearly saturated, and localized patches of turbulenceemerge; here the increase in the rate of production and dissipation become steeper, thelatter enhanced by the emergence of small turbulent scales. Within the localized patchesof turbulence, production exceeds the levels of fully turbulent boundary layers (Marxen& Zaki 2018). (iii) In the region 2200 <
√Rex < 2300, the turbulence spread and fills the
domain, and terms in the TKE equation start to relax towards their equilibrium valuesfor fully turbulent boundary layers.
The transition processes in cases E1N and E2N are contrasted in figures 12 and 13.The former figure shows wall-normal profiles of the average streamwise velocity andtemperature, evaluated at different streamwise positions within the transition zone. Andthe latter figure shows three-dimensional views of the vortical structures, visualized usingthe Q−criterion, within the transition regions of both cases. Transition in case E1Ntakes place via the formation and breakdown of Λ−shaped vortices. This process takesplace over a relatively short streamwise distance as shown qualitatively in figure 13 anddemonstrated by the skin-friction profile (figure 3). The relatively abrupt transition isaccompanied by a distortion of the mean streamwise velocity profile in the near-wallregion, followed by a subsequent relaxation of the outer part of the profile towards thefully turbulent curve. The same trend is captured in the mean-temperature profile. Incase E2N, transition is due to the secondary instability of streamwise-elongated streaks.While the streaks themselves are not captured in visualization of the Q-criterion, theirsecondary instability is seen in the figure. The transition length is longer in this case, andtherefore the mean-velocity and temperature profiles gradually approaches the turbulentcurve.
For case E1N, the left and right panels of figure 13a show that the Λ-structures,which are generated as a result of the amplification of mode 〈30, 3〉, are located closeto the edge of the boundary layer. They lie above the near-wall streaks shown in figure9d, and successive rows of Λ’s are staggered in the spanwise direction. Typical of hairpinstructures in wall-bounded flows (see e.g. Adrian 2007; Farano et al. 2015), their legs leadto ejections in the plane of symmetry while the head generates a strong sweep motion. The

Most unstable route to boundary-layer turbulence 23
0 0.2 0.4 0.6 0.8 10
0.5
1
1.5
1 2 3 4 50
0.5
1
1.5(a)
0 0.2 0.4 0.6 0.8 10
0.5
1
1.5
1 2 3 4 50
0.5
1
1.5(b)
Figure 12. Wall-normal profiles of time and spanwise averaged streamwise velocity (left plots),
u, and temperature (right plots), T , at different locations along the transition zone. (a) Theprofiles of case E1N correspond to 2400 6
√Rex 6 2700 with increment of 50 from light to dark
colours (also thin to thick lines). (b) The profiles of case E2N correspond to 2000 6√
Rex 6 2300with increment of 50 from light to dark colours (also thin to thick lines).
(a)
(b)
Figure 13. Iso-surfaces of Q = 1× 10−4 coloured by u′ (left plots) and v′ (right plots)corresponding to cases (a) E1N and (b) E2N.
wall-normal and streamwise velocity fluctuations therefore have opposite signs in thoseregions. Ejections due to positive wall-normal velocity fluctuations are accompanied bytransport of low streamwise momentum upward and a negative streamwise fluctuation;sweep due to negative v′ leads to downward transport of high-momentum fluid and apositive u′ perturbation. The late-stages in the evolution of these Λ-structures resemblenatural transition to turbulence, where trains of hairpin vortices are formed and breakdown over a short streamwise distance. Since the structures are staggered in the span, afully turbulent flow is established quickly downstream thus leading to a short transitionlength.
Figure 13b for case E2N shows that Λ-structures form in this case as well, and successiverows are similarly staggered in the spanwise direction. However, breakdown to turbulence

24 R. Jahanbakhshi and T.A. Zaki
does not commence at the tips of individual structures; instead it is initiated due to theinstability of the underlying steady streaks. These streaks are clearly captured in figure11d, and at the same locations the breakdown pattern is clear in figure 13b. In thisregion, the streaks are elevated low-speed structures (negative u′) straddled by Λ’s thatinduce their ejection (positive v′). Since breakdown takes place on the low-speed streaks,it directly impacts every other row of the Λ’s and subsequently spreads to fill the domain;the transition length is therefore longer in this case relative to E1N.
4.3. Prediction from Linear Stability Theory
In order to highlight the importance of the present nonlinear approach in determiningthe inflow disturbance, we examine other possible inflow conditions that are selectedbased on linear theory alone. The starting point is to evaluate the linear evolution ofall the Orr-Sommerfeld and Squire instability waves that are part of the inlet condition,using the linear parabolized instability equations (Park & Zaki 2018). The N -factorassociated with every 〈F, kz〉 wave was obtained,
N -factor =1
2ln
(E〈F,kz〉E0
), (4.5)
where E0 is the energy of the mode at the inlet. The results are shown for threedownstream locations in figure 14(a). Depending on the point at which the growth ratesare computed, different instability waves attain highest N−factor value. Figure 14(b)shows the change of N−factor versus streamwise location for the four instability wavesthat are each most amplified within a sub-region of the computational domain; mode〈110, 0〉 for
√Rex < 2190; mode 〈100, 0〉 along 2190 <
√Rex < 2470; mode 〈90, 0〉 along
2470 <√
Rex < 2650, and mode 〈20, 2〉 for√
Rex > 2650. In order to make use of theseresults in selecting the inflow condition, prior knowledge of transition location is needed;linear theory does not provide this information.
We examined four inflow conditions that were selected based on the linear results,and computed their evolution using direct numerical simulations in order to compare theoutcome to the nonlinearly most unstable disturbance. These new cases are designatedE1L1, E1L2, E1L3, and E2L, and their parameters are reported in table 2. The first threeare at the lower inflow energy level and, since transition is expected in the second half ofthe domain, 99% of the inflow energy is allocated to modes 〈100, 0〉, 〈90, 0〉 and 〈20, 2〉,respectively. The fourth case, E2L, is at the higher inflow energy level and, therefore,99% of the inflow energy is assigned to mode 〈110, 0〉. For all four cases, the remaining1% of the inflow energy was in the form of broadband forcing, in order to enable possiblenonlinear interactions and secondary instabilities. The outcome of these simulations iscontrasted to the nonlinearly most unstable cases in figure 14c, where Cf is plotted versusdownstream distance. Note that, for some of these simulations, the domain was extendedin the streamwise direction in order to capture the delayed transition to turbulence, inparticular in E1L1 and E1L2.
The transition scenarios of the new simulations are also very different from the non-linearly obtained inflow condition (not shown here). Cases E1L1 and E1L2 are classicalfundamental second-mode transition, with a detuned secondary instability regions alongwhich streaks are generated and break down. Case E1L3 is a typical first-mode obliquebreakdown, in which the primary three-dimensional wave develops oblique instabilities,Λ-structures and ultimately hairpin vortices that become the seat for the onset ofturbulence. Similar to cases E1L1 and E1L2, the transition scenario of case E2L is atypical second-mode fundamental mechanism. However, the incited secondary instabilityhas the same frequency as the primary mode.

Most unstable route to boundary-layer turbulence 25
10 50 90 130 170 210 25002468
101214
0 1 2
10 50 90 130 170 210 25002468
101214
0 1 2 3
10 50 90 130 170 210 25002468
101214
0 1 2 3 4
(a)
(b) (c)
Figure 14. (a) Contours of N−factor computed from equation 4.5 from left to right for√Rexf = 2100, 2500 and 2900 respectively. (b) The N−factor of the important modes versus
streamwise location. (c) Skin friction curves corresponding to the nonlinearly most unstable cases(E1N and E2N), and the linearly most unstable cases (E1L1, E1L2, E1L3 and E2L) presentedin table 2.
In all four cases, the inflow primary instability is the key determinant of the path toturbulence. And while the linearly most unstable waves guarantee fastest exponentialgrowth based on linear theory, they do not necessarily guarantee largest energy in thenonlinear regime or earliest secondary instability and transition. In contrast, when thenonlinearly most unstable inflow condition was adopted, the resulting transition mecha-nism was not due to any one particular inflow wave; instead, the nonlinear interactions ofthe inflow instabilities led to the generation of new waves, the distortion of the base-flowand the earliest possible transition location.
5. Summary and conclusions
An ensemble-based variational (EnVar) algorithm is introduced to evaluate the non-linearly most unstable inflow disturbance that results in the earliest location of laminar-to-turbulence transition in a hypersonic boundary layer. This disturbance (i) has aprescribed amount of total energy, (ii) satisfies the full Navies-Stokes equations, (iii) andundergoes the fastest breakdown to turbulence. The first two elements are constraintsand the third is the objective of the constrained optimization; the latter was modelledusing a cost function that is proportional to the skin friction along the plate. Duringeach iteration of the algorithm, an ensemble of possible solutions are advanced, and theassociated outcomes are used to evaluate the gradient of the cost function. New candidatesolutions are then formed and the process is repeated until convergence.
The algorithm was applied in the case of zero-pressure-gradient boundary-layer flowat free-stream Mach number M∞ = 4.5, and for two levels of the inflow disturbanceenergy. The level of energy of the first case is of the same order as the kinetic energyof stratospheric turbulent layers, measured during a recent experimental campaign in anattempt to replicate the environmental condition of high-altitude flight tests. The second

26 R. Jahanbakhshi and T.A. Zaki
case had fifty-times larger energy, in order to highlight the effect of this parameter onthe outcome of the algorithm. The laminar-to-turbulence transition scenarios due tothe nonlinearly most dangerous disturbances from each case were examined in detail.While at the higher energy level, transition displays symptoms of second-mode obliquebreakdown, the lower energy case can not be ascribed to any classical route. Instead,transition is initiated due to nonlinear interactions of a couple of normal acoustic (second-mode) disturbances and an oblique vorticity (first-mode) instability wave. Their nonlinearinteractions spurs new instabilities waves and distort the mean flow, ultimately leadingto very rapid growth of three-dimensional waves that form Λ-structures and break downto turbulence.
A number of other inflow conditions, all selected based on the amplification ratesfrom linear theory, were also examined using direct numerical simulations. These effortsinvariably led to classical breakdown scenarios and, for the same level of inflow energy,delayed transition onset relative to the nonlinearly most unstable disturbance. The resultsthus highlight that a nonlinear approach is required to provide a strict, minimum boundon transition Reynolds number.
Despite the present use of direct numerical simulations, the EnVar technique is ap-plicable for any numerical-design tool. It is specially advantageous relative to adjoint-based techniques which become unstable over long optimization time-horizons in chaotictransitional and turbulent flows. The EnVar approach can also be adopted with any choiceof the cost function, for example based on the disturbance energy or wall temperature.The norms associated with these two quantities were evaluated when the cost functionwas based on skin friction. The results demonstrated that the optimal inflow disturbanceis likely to differ, in particular if the cost function is based on wall temperature.
The nonlinearly most dangerous disturbance provides an objective measure for evalu-ating design performance, in particular when environmental disturbances are uncertain.If a design is modified, for instance for the purpose of delaying transition, the spectralcontent of what constitutes the most dangerous disturbance will, however, change andmust be re-evaluated. If transition is delayed in the new configuration, design surety isguaranteed.
Acknowledgement
This work was supported in part by the US Air Force Office of Scientific Research (grantFA9550-16-1-0103) and by the Office of Naval Research (grant N00014-17-1-2339).
Appendix A. Ensemble generation algorithm
In this appendix, the algorithm for constructing the ensemble members that are usedin the optimization procedure (2.26) is described. The starting point is the mean controlvector, c(e), which is either the initial guess or the outcome of the optimization at theend of the previous iteration, and satisfies the energy constraint. The objective is togenerate an ensemble of control vectors, c(r) for r = 1 to Nen, around this mean; therelationship between c(e) and c(r) is given by equation (2.19), and therefore c(e) is notthe arithmetic average of the members. The latter must not deviate appreciably fromthe mean, in a sense that will be quantified using the variance of the ensemble, and musteach satisfy the energy constraint as well. Another important consideration is that, fora particular ensemble size Nen, the members must span the control vector subspace asbest as possible and be well-conditioned. The ensemble generation algorithm has twomain steps: first, a very large random ensemble is formed that satisfies specific criteria;

Most unstable route to boundary-layer turbulence 27
second, a smaller ensemble is determined from the larger one, and whose members arebetter conditioned. A detailed description of the first step is presented here, while for thesecond step we only quote the procedure and refer the reader to Evensen (2009, chapter11) for its theoretical foundation and proof of concept.
In the first step of the algorithm, our concern is to enforce the constraints that theensemble members should satisfy rather than how well the ensemble is conditioned.Therefore, in order to ensure that the members span the control-vector subspace, wegenerate a very large ensemble. Since the members will be randomly generated, andassuming a very large size of the ensemble, it is very likely that any possible controlvector can be expressed as a linear superposition of the ensemble members. There arethree constraints that must be satisfied, related to the mean, covariance and energy. Asdiscussed in §2.2, satisfying the energy constraint by the mean and ensemble members isnot possible if the arithmetic average is adopted. In order to address this challenge, weperformed two change of variables during the algorithm, referred to as e and e later in thissection. And the covariance constraint is to ensure that the members of the ensemble areclose to their mean, which is an essential condition of the EnVar optimization procedure.
We start by constructing the very large ensemble of size Υ ×Nen. In analogy to (2.19),the ensemble members are related to the mean by,
A1c(e) ◦A1c
(e) =1
ΥNen
ΥNen∑r=1
A1c(r) ◦A1c
(r), (A 1a)
and
A2c(e) =
1
ΥNen
ΥNen∑r=1
A2c(r), (A 1b)
where A1 and A2 are defined in equations (2.12) and (2.20), respectively. The above twoequalities can be encoded into one expression by defining e(r) ∈ R2M×1,
e(r) ≡ A1c(r) ◦A1c
(r) + A2c(r), (A 2)
whose arithmetic average is e(e). A further change of variables is introduced in order tosimplify the algorithm,
e(r) ≡ S−1(e(r) − e(e)
), (A 3)
where the diagonal matrix S is equal to diag (σ), and σ is a vector containing the desiredstandard deviations of the original ensemble members from their mean. By construction,e(r) has a zero mean and unit variance. Furthermore, as long as the members of theoriginal ensemble and their mean, e(r) and e(e), satisfy the energy constraint, the energyof e(r) is zero. Thus the ensemble that we are seeking satisfies the following conditions,
Pb1 = 0, (A 4a)
PPtr
= (ΥNen − 1) C, (A 4b)
and
btr1 A1P = 0, (A 4c)
where
P =[e(1) e(2) . . . e(ΥNen)
]2M×ΥNen
, (A 5)

28 R. Jahanbakhshi and T.A. Zaki
Algorithm 2: Generation of the ensemble.
Step 1 ;
• Generate ΥNen random vectors y(r) whose mean and covariance are 0 and I ;
• Find −1 6 Cij 6 1 that satisfies∑Mj=1 Cij = 0 for all 1 6 i 6M ;
• Perform Cholesky decomposition ofˆC in (A 8), and obtain LLtr, L ∈ R2M×2M ;
• Compute e(r) ∈ R2M×1 as e(r) = Ly(r), and store them in P ∈ R2M×ΥNen ;Step 2 ;
• Compute the singular value decomposition P = UΣVtr ;
• Retain the first Nen singular vectors in U, and store them in U ∈ R2M×Nen ;
• Retain the first Nen ×Nen quadrant of Σ, and store it in Σ ∈ RNen×Nen ;
• Retain the first Nen ×Nen quadrant of V, and store it in V ∈ RNen×Nen ;
• Generate the new ensemble perturbations matrix, P = U 1√ΥΣVtr.
Normalization of Σ by√Υ ensures the new ensemble has the correct variance;
• Compute e(r) = Sp(r) + e(e), where p(r) are the columns of P ∈ R2M×Nen ;
• Compute the control vectors c(r) from the set of e(r) using equation (A 2);
C =
[[Cij]M×M OM×M
OM×M IM×M
]2M×2M
, (A 6)
b1 =[1 1 . . . 1
]tr1×2M
. (A 7)
In the above, Cij = Cji are the correlation coefficients and Cii = 1, I is the identity matrix,O is a zero matrix, and A1 is defined in (2.20). Equation (A 4a) ensures that the meanof the ensemble is zero, equation (A 4b) is the covariance constraint, and equation (A 4c)enforces the energy constraint on all members of the ensemble. Note that the conditionCii = 1 is a consequence of the normalization in equation (A 3).
The problem can be simplified further by combing the covariance and the energyconstraints. From equations (A 4b) and (A 4c), we obtain btr1 A1C = 0, and therefore,
the energy constraint is equivalent to∑Mj=1 Cij = 0. Thus, we can redefine the problem
as evaluating a set of e whose arithmetic average is zero, and that are correlated withone another such that the components of their covariance matrix satisfy
∑Mj=1 Cij = 0.
The former condition is satisfied by randomly generating uncorrelated control vectors,y(r), that have a zero mean, while the latter condition is enforced by performing Choleskydecomposition of the covariance matrix and setting e(r) = Ly(r), where L is the triangularmatrix of Cholesky factorization. By definition, e(r) satisfy both conditions. Using thesymmetry of C, we can obtain CA1b1 = 0. Hence, zero is an eigenvalue of C and A1b1
is an eigenvector; the dimension of the eigenspace corresponding to this eigenvalue isunity, and the rank of C is equal to 2M − 1. Since the algorithm involves a Choleskydecomposition of the covariance matrix that can be used to span a linear space R2M×2M ,a new covariance matrix is defined whose rank is equal to 2M ,
ˆC =
[1 otr
o C
](2M+1)×(2M+1)
, (A 8)
where o ∈ R2M×1 is a vector of all zeros. Note that zero is still an eigenvalue of thismatrix.
The above procedure completes the first step of the ensemble generation, and provides

Most unstable route to boundary-layer turbulence 29
a set of e(r) ∈ R2M×1 which satisfy (A 4). The second step of the algorithm is to identify,from this large set of members, the best possible ensemble with size Nen. This taskinvolves singular-value-decomposition (SVD) of the large ensemble and choosing the Nendominant singular vectors and values as the new ensemble. In the limit of ΥNen →∞, the singular vectors and values of the large ensemble will converge to eigenvectorsand eigenvalues of the full-rank ensemble realizations (an ensemble that represents thephysical problem exactly). Using the SVD of the larger-sized ensemble to approximateits smaller-sized representation, therefore, ensures that for a given size the new ensembleprovides the best possible rendition. The complete procedure for the ensemble generationis summarized in algorithm 2.
Appendix B. Nonlinear energy transfer
In this appendix, the derivation of the nonlinear energy transfer term,
I〈F,kz〉 =
∫ Ly
0
∣∣∣A∗〈F1,kz,1〉F 〈F2,kz,2〉
∣∣∣ dy, (4.4)
is presented. The starting point is the transport term T1 in the TKE equation (4.3), whichis a nonlinear redistribution of energy between different perturbations. While all the othercontribution in the energy equation originate from linear terms of the momentum balance,T1 arises from the nonlinear advection term.
By integrating T1 in wall-normal direction, we obtain,
∫y
T1dy = −1
2
∂
∂x
∫ Ly
0
(A′ ·F ′
)dy︸ ︷︷ ︸
I
, (B 1)
where the vector quantities are defined as A′i = ρu′′u′′i and F ′i = u′′i , and the variableI represents the nonlinear interaction. In the above expression, it was assumed that thefluctuations vanish at the top and bottom boundaries of the domain and, as such, onlythe streamwise advection is retained. Using the two-dimensional Fourier representationsof the vectors A′ and F ′ in temporal frequency and spanwise wavenumber, I can berewritten as
I =
∫ Ly
0
∑F1,kz,1
∑F2,kz,2
(A〈F1,kz,1〉 · F 〈F2,kz,2〉
)e−i
(2π(kz,1+kz,2)
Lzz+
√Rex0 (F1+F2)
106t
) dy.
(B 2)A new variable is defined I〈F,kz〉 =
∑F1,kz,1
∑F2,kz,2
A〈F1,kz,1〉 · F 〈F2,kz,2〉, where the
summation is performed over all 〈F1, kz,1〉 and 〈F2, kz,2〉 that satisfy F = F1 ± F2 and
kz = kz,1 ± kz,2. In terms of I〈F,kz〉, equation (B 2) becomes,
I =∑F,kz
(∫ Ly
0
I〈F,kz〉dy
)e−i
(2πkzLz
z+
√Rex0F
106t
). (B 3)
Therefore the quantity I〈F,kz〉, referred to as the modal energy transfer coefficient(Cheung & Zaki 2010), represents the amount of energy transferred to mode 〈F, kz〉via nonlinear interaction of modes 〈F1, kz,1〉 and 〈F2, kz,2〉. The nonlinear modal en-ergy transfer coefficient is defined to include the contribution from all four quadrants

30 R. Jahanbakhshi and T.A. Zaki
〈±F,±kz〉,
I〈F,kz〉 =
∫ Ly
0
∣∣∣A∗〈F1,kz,1〉F 〈F2,kz,2〉
∣∣∣ dy (B 4)
where ∗ denotes complex conjugate transpose and |.| is the absolute value.
REFERENCES
Adrian, Ronald J 2007 Hairpin vortex organization in wall turbulence. Physics of Fluids19 (4), 041301.
Bertolotti, FP, Herbert, Th & Spalart, PR 1992 Linear and nonlinear stability of theBlasius boundary layer. Journal of fluid mechanics 242, 441–474.
Bewley, Thomas R, Moin, Parviz & Temam, Roger 2001 Dns-based predictive control ofturbulence: an optimal benchmark for feedback algorithms. Journal of Fluid Mechanics447, 179–225.
Casper, Katya M, Beresh, Steven J, Henfling, John F, Spillers, Russell W, Pruett,Brian OM & Schneider, Steven P 2016 Hypersonic wind-tunnel measurements ofboundary-layer transition on a slender cone. AIAA Journal 54 (1), 1250–1263.
Chang, Chau-Lyan & Malik, Mujeeb R 1994 Oblique-mode breakdown and secondaryinstability in supersonic boundary layers. Journal of Fluid Mechanics 273, 323–360.
Cherubini, Stefania, De Palma, Pietro, Robinet, J-C & Bottaro, Alessandro 2011 Theminimal seed of turbulent transition in the boundary layer. Journal of Fluid Mechanics689, 221–253.
Cherubini, Stefania, Robinet, J-C & De Palma, Pietro 2013 Nonlinear control ofunsteady finite-amplitude perturbations in the Blasius boundary-layer flow. Journal ofFluid Mechanics 737, 440–465.
Cheung, Lawrence C & Zaki, Tamer A 2010 Linear and nonlinear instability waves inspatially developing two-phase mixing layers. Physics of Fluids 22 (5), 052103.
Colburn, CH, Cessna, JB & Bewley, TR 2011 State estimation in wall-bounded flowsystems. part 3. the ensemble Kalman filter. Journal of Fluid Mechanics 682, 289–303.
Evensen, Geir 2009 Data Assimilation: The Ensemble Kalman Filter . Springer.Farano, Mirko, Cherubini, Stefania, Robinet, Jean-Christophe & De Palma, Pietro
2015 Hairpin-like optimal perturbations in plane poiseuille flow. Journal of FluidMechanics 775.
Fedorov, Alexander 2011 Transition and stability of high-speed boundary layers. Annualreview of fluid mechanics 43, 79–95.
Franko, Kenneth J & Lele, Sanjiva 2014 Effect of adverse pressure gradient on high speedboundary layer transition. Physics of Fluids 26 (2), 024106.
Franko, Kenneth J & Lele, Sanjiva K 2013 Breakdown mechanisms and heat transferovershoot in hypersonic zero pressure gradient boundary layers. Journal of FluidMechanics 730, 491–532.
Gao, X, Wang, Y, Overton, N, Zupanski, M & Tu, X 2017 Data-assimilatedcomputational fluid dynamics modeling of convection-diffusion-reaction problems. Journalof Computational Science 21, 38–59.
Haack, A, Gerding, M & Lubken, F-J 2014 Characteristics of stratospheric turbulent layersmeasured by LITOS and their relation to the Richardson number. Journal of GeophysicalResearch: Atmospheres 119 (18).
Harvey, William D 1978 Influence of free-stream disturbances on boundary-layer transition.NASA Technical Memorandum 78635 .
Herbert, Thorwald 1988 Secondary instability of boundary layers. Annual Review of FluidMechanics 20 (1), 487–526.
Herbert, Thorwald 1997 Parabolized stability equations. Annual Review of Fluid Mechanics29 (1), 245–283.
Jiang, Li, Choudhari, Meelan, Chang, Chau-Lyan & Liu, Chaoqun 2006 Numericalsimulations of laminar-turbulent transition in supersonic boundary layer. In 36th AIAAFluid Dynamics Conference and Exhibit , p. 3224.
Johnsen, Eric, Larsson, Johan, Bhagatwala, Ankit V, Cabot, William H, Moin,

Most unstable route to boundary-layer turbulence 31
Parviz, Olson, Britton J, Rawat, Pradeep S, Shankar, Santhosh K, Sjogreen,Bjorn, Yee, Helen C & others 2010 Assessment of high-resolution methodsfor numerical simulations of compressible turbulence with shock waves. Journal ofComputational Physics 229 (4), 1213–1237.
Juliano, Thomas J, Adamczak, David & Kimmel, Roger L 2015 HIFiRE-5 flight testresults. Journal of Spacecraft and Rockets 52 (3), 650–663.
Kato, Hiroshi, Yoshizawa, Akira, Ueno, Genta & Obayashi, Shigeru 2015 A dataassimilation methodology for reconstructing turbulent flows around aircraft. Journal ofComputational Physics 283, 559–581.
Kennedy, Richard E, Laurence, Stuart J, Smith, Michael S & Marineau, Eric C2018 Investigation of the second-mode instability at mach 14 using calibrated Schlieren.Journal of Fluid Mechanics 845.
Kimmel, Roger L, Adamczak, David W, Hartley, David, Alesi, Hans, Frost,Myles A, Pietsch, Robert, Shannon, Jeremy & Silvester, Todd 2018 Hypersonicinternational flight research experimentation-5b flight overview. Journal of Spacecraft andRockets pp. 1–12.
Laurence, SJ, Wagner, A & Hannemann, K 2016 Experimental study of second-modeinstability growth and breakdown in a hypersonic boundary layer using high-speedSchlieren visualization. Journal of Fluid Mechanics 797, 471–503.
Leyva, Ivett A 2017 The relentless pursuit of hypersonic flight. Physics Today 70 (11), 30–36.
Luchini, Paolo & Bottaro, Alessandro 2014 Adjoint equations in stability analysis. AnnualReview of fluid mechanics 46.
Mack, Leslie M 1984 Boundary-layer linear stability theory. Tech. Rep.. California Instituteof Technology, Jet Propulsion Laboratory.
Marxen, Olaf & Zaki, Tamer A. 2018 Turbulence in intermittent transitional boundarylayers and in turbulence spots. Accepted in Journal of Fluid Mechanics .
Mayer, Christian SJ, Von Terzi, Dominic A & Fasel, Hermann F 2011 Direct numericalsimulation of complete transition to turbulence via oblique breakdown at Mach 3. Journalof Fluid Mechanics 674, 5–42.
Mons, Vincent, Chassaing, J-C, Gomez, Thomas & Sagaut, Pierre 2016 Reconstructionof unsteady viscous flows using data assimilation schemes. Journal of ComputationalPhysics 316, 255–280.
Narasimha, R 1985 The laminar-turbulent transition zone in the boundary layer. Progress inAerospace Sciences 22 (1), 29–80.
Nocedal, Jorge & Wright, S. 2006 Numerical Optimization. Springer.
Novikov, Andrey V & Egorov, Ivan 2016 Direct numerical simulations of transitionalboundary layer over a flat plate in hypersonic free-stream. In 46th AIAA Fluid DynamicsConference, p. 3952.
Park, Junho & Zaki, Tamer A. 2018 Sensitivity of high-speed boundary-layer stability tobase-flow distortion. Accepted in Journal of Fluid Mechanics .
Pringle, Chris CT & Kerswell, Rich R 2010 Using nonlinear transient growth to constructthe minimal seed for shear flow turbulence. Physical review letters 105 (15), 154502.
Rabin, SME, Caulfield, CP & Kerswell, RR 2012 Triggering turbulence efficiently in planecouette flow. Journal of Fluid Mechanics 712, 244–272.
Schneider, Steven P 1999 Flight data for boundary-layer transition at hypersonic andsupersonic speeds. Journal of Spacecraft and Rockets 36 (1), 8–20.
Schneider, Steven P 2015 Developing mechanism-based methods for estimating hypersonicboundary-layer transition in flight: the role of quiet tunnels. Progress in Aerospace Sciences72, 17–29.
Sivasubramanian, Jayahar & Fasel, Hermann F 2015 Direct numerical simulation oftransition in a sharp cone boundary layer at Mach 6: fundamental breakdown. Journal ofFluid Mechanics 768, 175–218.
Sivasubramanian, Jayahar & Fasel, Hermann F 2016 Direct numerical simulation oflaminar-turbulent transition in a flared cone boundary layer at Mach 6. In 54th AIAAAerospace Sciences Meeting , p. 0846.
Stanfield, Scott A, Kimmel, Roger L, Adamczak, David & Juliano, Thomas J 2015

32 R. Jahanbakhshi and T.A. Zaki
Boundary-layer transition experiment during reentry of HIFiRE-1. Journal of Spacecraftand Rockets 52 (3), 637–649.
Sutherland, William 1893 Lii. the viscosity of gases and molecular force. The London,Edinburgh, and Dublin Philosophical Magazine and Journal of Science 36 (223), 507–531.
Suzuki, Takao 2012 Reduced-order Kalman-filtered hybrid simulation combining particletracking velocimetry and direct numerical simulation. Journal of Fluid Mechanics 709,249–288.
Thumm, A, Wolz, W & Fasel, H 1990 Numerical simulation of spatially growing three-dimensional disturbance waves in compressible boundary layers. In IUTAM Symposiumon Laminar-turbulent transition, pp. 303–308. Springer.
Wachter, Andreas & Biegler, Lorenz T. 2006 On the implementation of an interior-point filter line-search algorithm for large-scale nonlinear programming. MathematicalProgramming 106 (1), 25–57.
Xiao, Dandan & Papadakis, George 2017 Nonlinear optimal control of bypass transition ina boundary layer flow. Physics of Fluids 29 (5), 054103.
Yang, Yin, Robinson, Cordelia, Heitz, Dominique & Memin, Etienne 2015 Enhancedensemble-based 4DVar scheme for data assimilation. Computers & Fluids 115, 201–210.
Zaki, Tamer A & Durbin, Paul A 2005 Mode interaction and the bypass route to transition.Journal of Fluid Mechanics 531, 85–111.
Zaki, Tamer A & Durbin, Paul A 2006 Continuous mode transition and the effects of pressuregradient. Journal of Fluid Mechanics 563, 357–388.
Zhang, Chuanhong, Tang, Qing & Lee, Cunbiao 2013 Hypersonic boundary-layer transitionon a flared cone. Acta Mechanica Sinica 29 (1), 48–54.
Zhang, Chuanhong, Zhu, Yiding, Chen, Xi, Yuan, Huijing, Wu, Jiezhi, Chen, Shiyi,Lee, Cunbiao & Gad-el Hak, Mohamed 2015 Transition in hypersonic boundary layers.AIP Advances 5 (10), 107137.
Zhao, R, Wen, CY, Tian, XD, Long, TH & Yuan, W 2018 Numerical simulation of local wallheating and cooling effect on the stability of a hypersonic boundary layer. InternationalJournal of Heat and Mass Transfer 121, 986–998.
Zhong, Xiaolin & Wang, Xiaowen 2012 Direct numerical simulation on the receptivity,instability, and transition of hypersonic boundary layers. Annual Review of FluidMechanics 44, 527–561.
Zhu, Yiding, Chen, Xi, Wu, Jiezhi, Chen, Shiyi, Lee, Cunbiao & Gad-el Hak, Mohamed2018 Aerodynamic heating in transitional hypersonic boundary layers: Role of second-mode instability. Physics of Fluids 30 (1), 011701.
Zhu, Yiding, Zhang, Chuanhong, Chen, Xi, Yuan, Huijing, Wu, Jiezhi, Chen, Shiyi,Lee, Cunbiao & Gad-el Hak, Mohamed 2016 Transition in hypersonic boundary layers:Role of dilatational waves. AIAA Journal pp. 3039–3049.