Embed Size (px)
Citation preview
Hierarchical models
STAT 518
Sp 08

Rainfall measurementRain gauge (1 hr)
High wind, low rain rate (evaporation)Spatially localized, temporally moderate
Radar reflectivity (6 min)Attenuation, not ground measureSpatially integrated, temporally fine
Cloud top temp. (satellite, ca 12 hrs)Not directly related to precipitationSpatially integrated, temporally sparse
Distrometer (drop sizes, 1 min)Expensive measurementSpatially localized, temporally fine
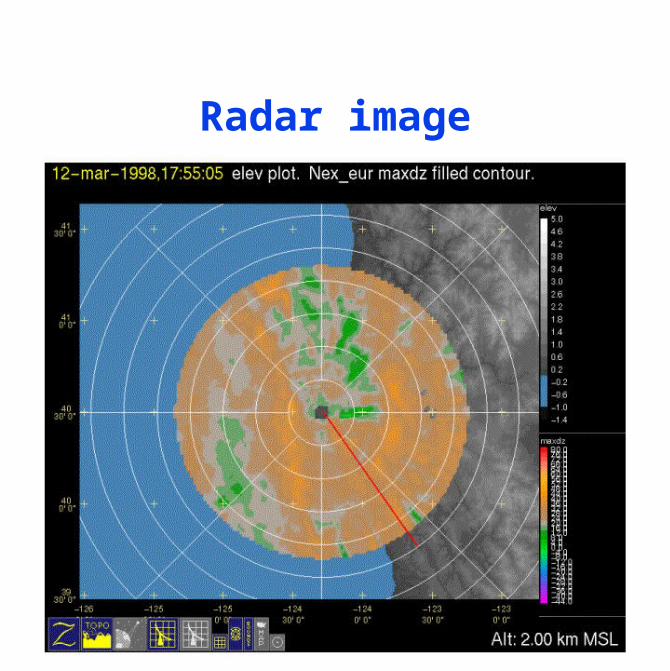
Radar image


Drop size distribution
QuickTime™ and aPhoto - JPEG decompressor
are needed to see this picture.
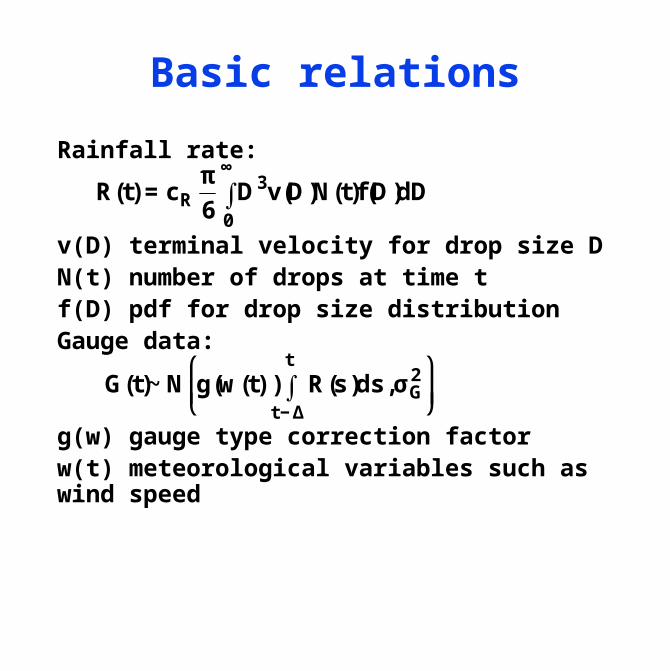
Basic relations
Rainfall rate:
v(D) terminal velocity for drop size DN(t) number of drops at time tf(D) pdf for drop size distributionGauge data:
g(w) gauge type correction factorw(t) meteorological variables such as wind speed
€
R(t) = cRπ
6D3v(D)N(t)f(D)
0
∞
∫ dD
€
G(t)~ N g(w(t)) R(s)ds,σG2
t − Δ
t
∫ ⎛
⎝ ⎜
⎞
⎠ ⎟
Basic relations, cont.
Radar reflectivity:
Observed radar reflectivity:
€
ZD(t) = cZ D6v(D)N(t)f(D)dD0
∞
∫ ⎛
⎝ ⎜
⎞
⎠ ⎟
€
Z(t) ~ N(ZD (t),σZ2 )

Structure of model
Data: [G|N(D),G] [Z|N(D),Z]
Processes: [N|N,N] [D|t,D]
log GARCH LN
Temporal dynamics: [N(t)|]
AR(1)
Model parameters: [G,Z,N,,D|H]
Hyperparameters: H
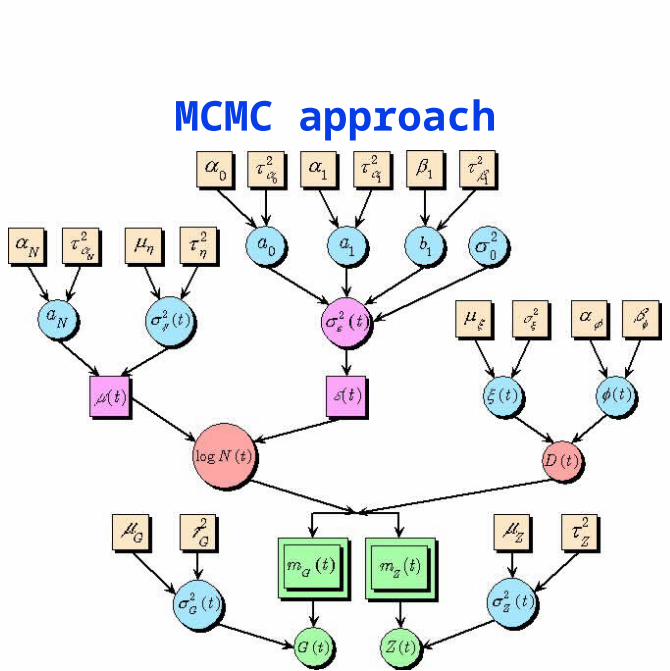
MCMC approach
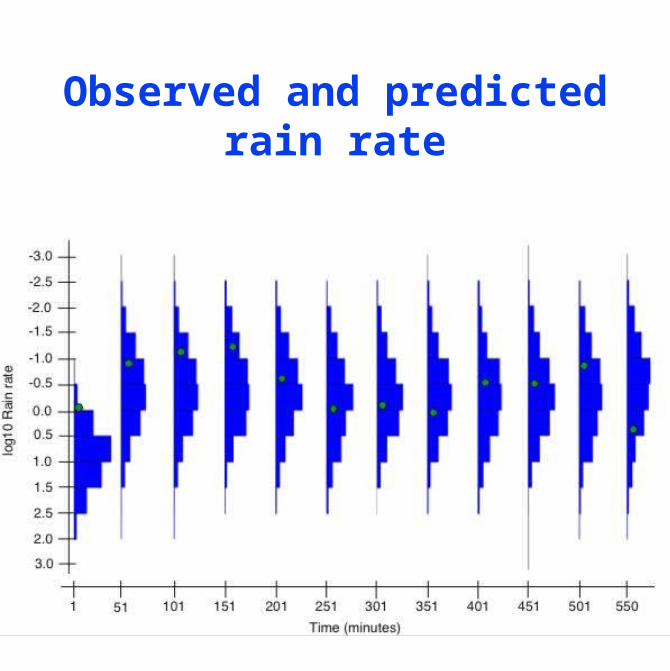
Observed and predicted rain rate
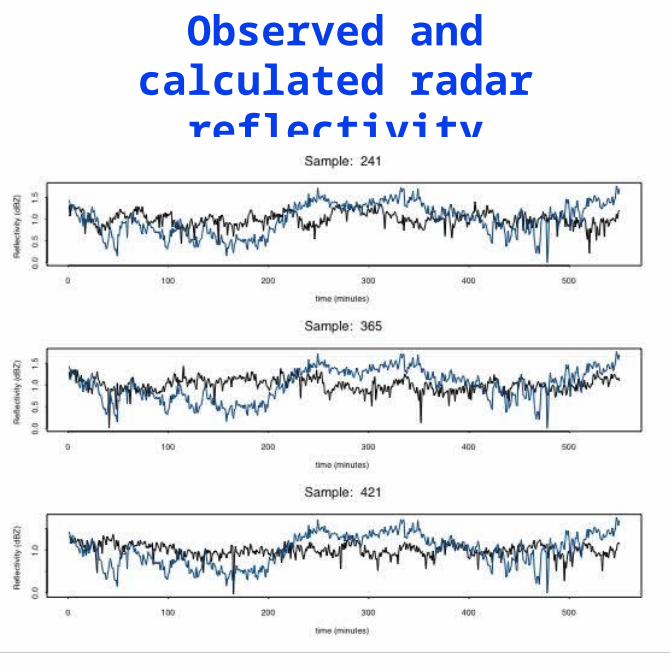
Observed and calculated radar reflectivity
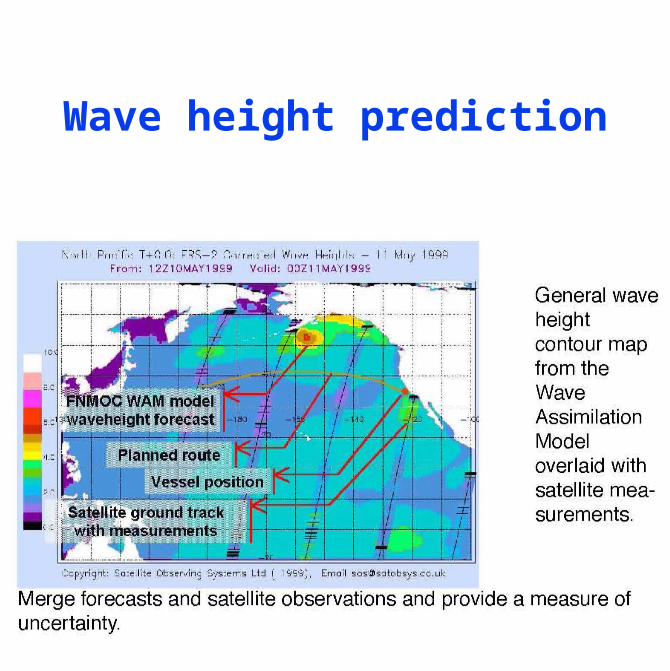
Wave height prediction
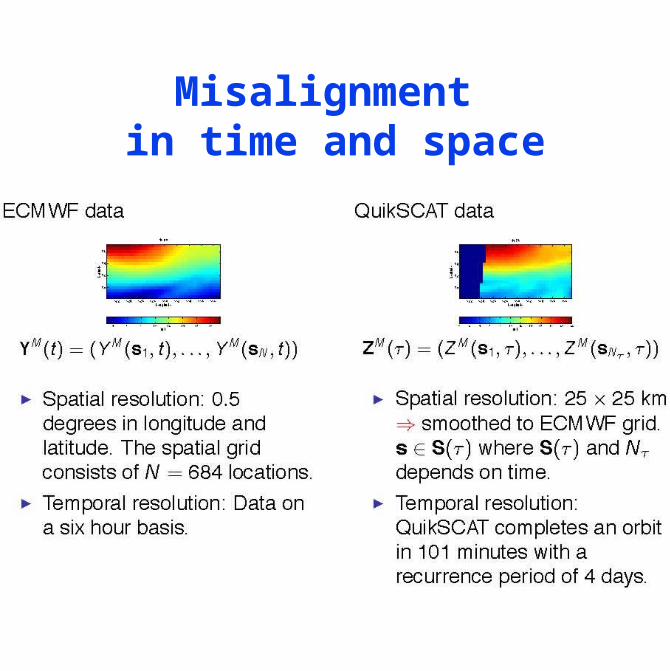
Misalignment in time and space
The Kalman filter
Gauss (1795) least squaresKolmogorov (1941)-Wiener (1942)
dynamic predictionFollin (1955) Swerling (1958)Kalman (1960)
recursive formulationprediction depends onhow far current state isfrom average
Extensions
A state-space model
Write the forecast anomalies as a weighted average
of EOFs (computed from the empirical covariance) plus small-scale noise.
The average develops as a vector autoregressive model:
Y(s, t + τ) = ws (u)Y(u, t)du+∫ η(s, t+ τ)
Y(s, t) = ai (t)φi (s)∑
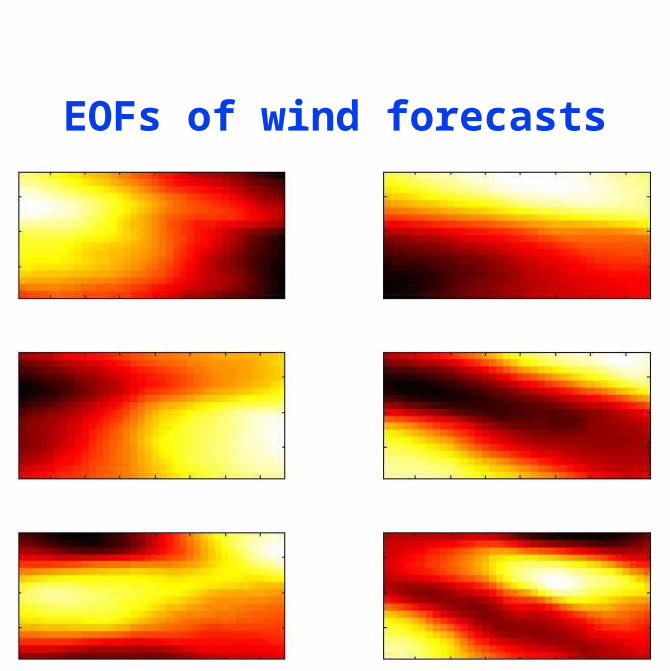
EOFs of wind forecasts
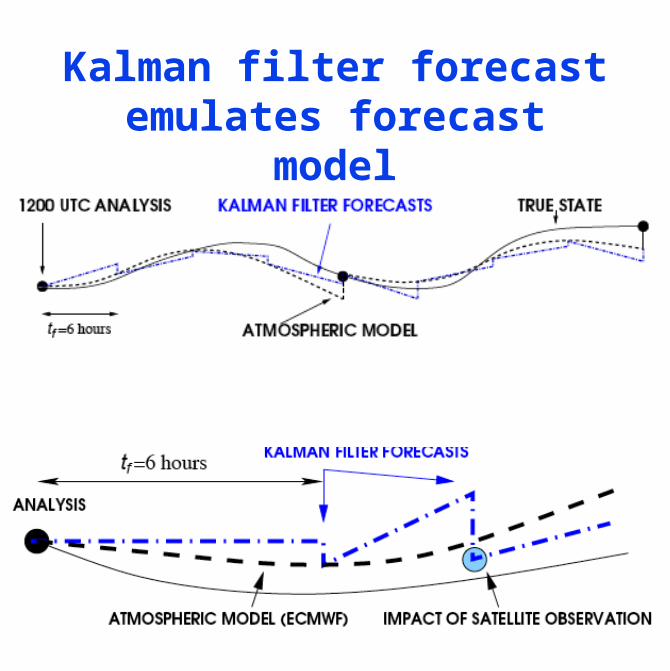
Kalman filter forecast emulates forecast model
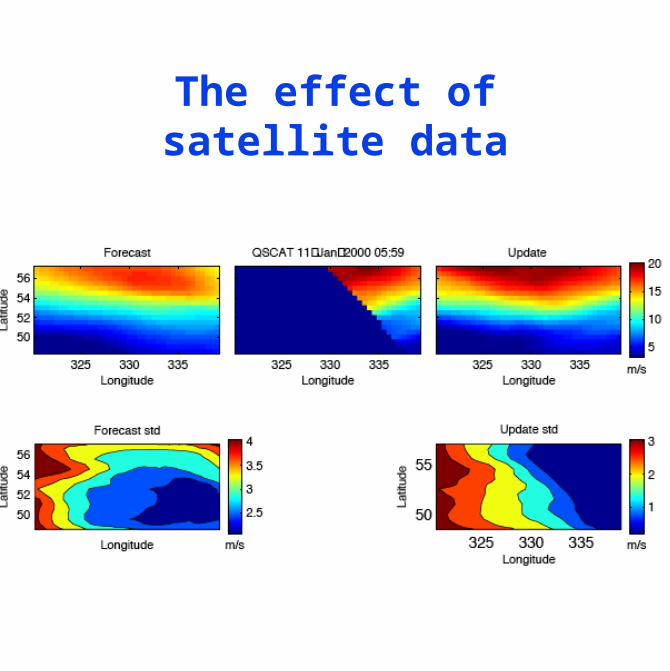
The effect of satellite data
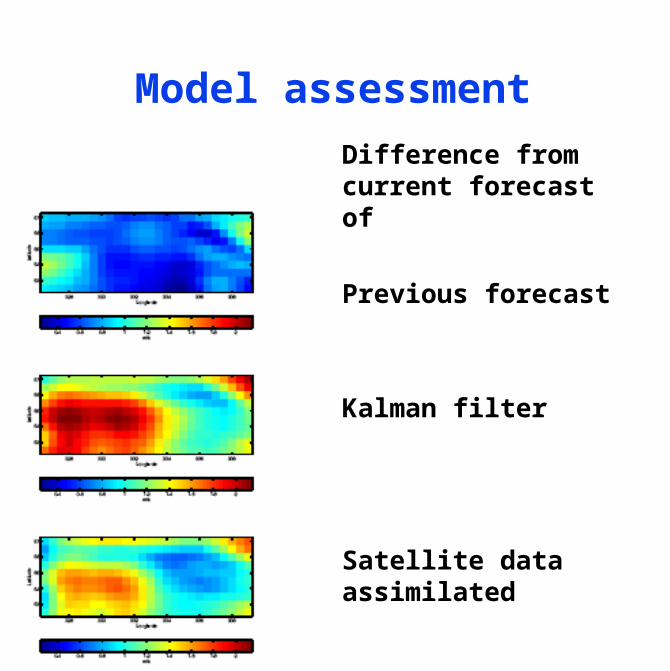
Model assessment
Difference from current forecast of
Previous forecast
Kalman filter
Satellite data assimilated