Embed Size (px)
Citation preview

Computer Aided Geometric Design 29 (2012) 499–509
Contents lists available at SciVerse ScienceDirect
Computer Aided Geometric Design
www.elsevier.com/locate/cagd
Hierarchical bases of spline spaces with highest order smoothness overhierarchical T-subdivisions
Meng Wu, Jinlan Xu, Ruimin Wang, Zhouwang Yang ∗
School of Mathematical Sciences, University of Science and Technology of China, China
a r t i c l e i n f o a b s t r a c t
Article history:Available online 5 April 2012
Keywords:SplinesT-subdivisionsAdaptive isogeometric analysisHierarchical bases
The prospect of applying spline spaces over T-subdivisions to adaptive isogeometricanalysis is an exciting one. One major issue with spline spaces over T-subdivisions is inproviding proper bases (shape functions) for finite element analysis. In this paper, wepropose a method for the construction of hierarchical bases of a spline space with highestorder smoothness over a consistent hierarchical T-subdivision. Our method is induced bythe surjection condition, and this set of basis functions is hierarchically adaptive. We alsopresent a concrete set of non-negative hierarchical bases over a T-subdivision and applythem in adaptive finite element analysis.
© 2012 Elsevier B.V. All rights reserved.
1. Introduction
Spline spaces over T-subdivisions (Deng et al., 2006) are spaces of piecewise polynomials with a certain continuityover T-subdivisions which are a type of rectangular mesh. The definition of a spline space over a T-subdivision is parallelto the definition of a finite element space over a triangular mesh. They have a certain algebraic precision in common.Algebraic precision is important for estimation of a priori errors. This is necessary in finite element analysis because itdetermines whether the method will give a solution that converges to a true solution of the weak form of a differentialequation (Brenner and Scott, 2002).
Recently, NURBS-based isogeometric analysis (Hughes et al., 2005) has been proposed to integrate the progress of CADand CAE (finite element analysis). Adaptive process is not convenient for NURBS-based isogeometric analysis because of thetensor product structure of NURBS which leads to many superfluous degrees of freedom. Spline spaces over T-subdivisionsare suitable for adaptive isogeometric analysis because a T-subdivision allows for T-junctions and a certain algebraic preci-sion of spline spaces over T-subdivisions.
One major challenge in the application of spline spaces over T-subdivisions in isogeometric analysis is to construct bases(shape functions) of a given spline space over a T-subdivision with suitable properties. PHT-splines are classic bases thatgenerate a spline space with bicubic and continuity of order 1 along the x direction and the y direction, respectively. Theyhave been used in CAGD (Deng et al., 2008b, Wang et al., 2011b) and in adaptive isogeometric analysis (Wang et al., 2011a,Nguyen-Thanh et al., 2011b, Nguyen-Thanh et al., 2011a). However, a spline space over a T-subdivision with bicubic andcontinuity of order 2 along the x direction and the y direction, respectively, has the same algebraic precision with the spaceformed by PHT-splines over the same T-subdivision but one fewer degree of freedom. Spline spaces over T-subdivisions withbi-degree (m,n) and continuity of order (m − 1) along the x direction and (n − 1) along the y direction are called splinespaces with highest order smoothness over T-subdivisions. To achieve the same algebraic precision with as few degrees of
* Corresponding author.E-mail address: [email protected] (Z. Yang).
0167-8396/$ – see front matter © 2012 Elsevier B.V. All rights reserved.http://dx.doi.org/10.1016/j.cagd.2012.03.024

500 M. Wu et al. / Computer Aided Geometric Design 29 (2012) 499–509
Fig. 1. A T-subdivision T .
freedom as possible in adaptive isogeometric analysis, it is important to construct the bases of spline spaces with highestorder smoothness over T-subdivisions.
In Wu et al. (2011), a set of basis functions is given by an l-edge-based process. However, refinement of a T-subdivisionproceeds edge-by-edge in applications. From the perspective of applications, this paper presents an edge-based methodfor constructing a set of basis functions of spline spaces with highest order smoothness over a consistent hierarchical T-subdivision. These bases are called hierarchical bases. This edge-based method is induced by the surjection condition definedin this paper. As an example, hierarchical bicubic bases over T3,3 (Wu et al., 2011) are used to solve a two-dimensionalelliptic boundary value problem.
The rest of this paper is organized as follows. In Sections 2 and 3, definitions and some results in Deng et al. (2008a)are reviewed. The central concept of the surjection condition is introduced in Section 4. Section 5 presents an example ofhierarchical bicubic bases over T3,3 (Wu et al., 2011) in Section 5.1 and a preliminary application in finite element analysisusing these hierarchical bicubic bases in Section 5.2. Finally, we conclude with the future work in Section 6.
2. Spline spaces over T-subdivisions
In this section, the concepts of T-subdivisions (Mourrain, 2010) (i.e. T-meshes in Deng et al., 2006) and spline spacesover T-subdivisions (Deng et al., 2006) are reviewed and some results from Deng et al. (2008a) that we need are used atthe same moment.
2.1. T-subdivisions and hierarchical T-subdivisions
A T-subdivision is a rectangular mesh that allows T-junctions, and a regular T-subdivision is a T-subdivision whoseboundary grid lines form a rectangle. A grid point in a T-subdivision is called a vertex of the T-subdivision. For example, inFig. 1 {bi}i=10
i=1 ∪ {vi}i=5i=1 are the vertices of T , where v2 is a crossing vertex and {bi}i=10
i=1 ∪ {vi}i=5i=1 − {v2,b1,b3,b6,b8} are
T-vertices. The line segment connecting two adjacent vertices on a grid line is called an edge of the T-subdivision, such asv4 v5, b9b10, v2 v3 in Fig. 1. b2 v3 is a large edge (l-edge for short), which is the longest possible line segment consistingof several edges. The boundary of a regular T-subdivision consists of four l-edges, which are called boundary l-edges. Theother l-edges in a T-subdivision are called interior l-edges.
In this paper, we focus on a particular T-subdivision called a hierarchical T-subdivision (Mourrain, 2010), which isdefined as follows.
Definition 1. (See Mourrain, 2010.) A hierarchical T-subdivision is either the initial square or is obtained from a hierarchicalT-subdivision by splitting a cell along a vertical or horizontal line.
The generated progress of a hierarchical T-subdivision is suitable for adaptive subdivision.
2.2. Spline spaces with highest order smoothness over T-subdivisions
Given a T-subdivision T , C is the set of all cells of T and ΩT is the region occupied by cells in C . Spline spaces overT-subdivisions (Deng et al., 2006) are defined by
S(m,n,α,β,T ) := {f (x, y) ∈ Cα,β(ΩT ): f (x, y)|φ ∈ Pm,n, ∀φ ∈ C
}, (1)
where Pm,n is the space of all polynomials with bi-degree (m,n), and Cα,β is the space consisting of all bivariate functionsthat are continuous in ΩT with order α along the x direction and order β along the y direction. In this paper, we willfocus on the spline space S(m,n,m − 1,n − 1,T ), which is said to be a spline space with highest order smoothness over T(Wu et al., 2011).
For a T-subdivision T , its extended T-subdivision (extended T-mesh in Deng et al., 2008a) T ε associated withS(m,n,m − 1,n − 1,T ) is an enlarged T-subdivision formed by copying each horizontal boundary line of T m times,

M. Wu et al. / Computer Aided Geometric Design 29 (2012) 499–509 501
Fig. 2. A T-subdivision T and its extended T-subdivision T ε associated with S(3,3,2,2,T ).
and each vertical boundary line of T n times, and by extending all line segments with an endpoint on the boundary of T .Fig. 2 illustrates a T-subdivision (left) and its extended T-subdivision (right) associated with S(3,3,2,2,T ).
A spline space over a given T-subdivision T with homogeneous boundary conditions (Deng et al., 2008a) is defined by
S(m,n, α,β,T ) := {f (x, y) ∈ Cα,β
(R
2): f (x, y)|φ ∈ Pm,n, ∀φ ∈ C and f |R2\ΩT≡ 0
},
where Pm,n , C , ΩT are defined as above. One important observation in Deng et al. (2008a) is that the two spline spaces,S(m,n,m − 1,n − 1,T ) and S(m,n,m − 1,n − 1,T ε), are closely related.
Theorem 2. (See Remark of Theorem 2.1 in Deng et al., 2008a.) Given a T-subdivision T , let T ε be the extended T-subdivisionassociated with S(m,n,m − 1,n − 1,T ). Then,
S(m,n,m − 1,n − 1,T ) = S(m,n,m − 1,n − 1,T ε
)∣∣T
,
dim S(m,n,m − 1,n − 1,T ) = dim S(m,n,m − 1,n − 1,T ε
).
In Theorem 2, T has been extended such that multiplicities of all the edges of T ε are one associated with S(m,n,
m − 1,n − 1,T ). Based on the above theorem, we need only to consider spline spaces with highest order smoothness overT-subdivisions with homogeneous boundary conditions.
3. Conformality vector spaces
A conformality vector space (Wu et al., 2011) is a means of describing a spline space with highest order smoothness overa T-subdivision with homogeneous boundary conditions, using a smoothing cofactor method (Wang, 1979). In this section,the notion of a conformality vector space is reviewed (Wu et al., 2011). Firstly, the definition of a conformality vector spaceof degree d on a line segment is presented, as in Wu et al. (2011).
Definition 3. (See Wu et al., 2011.) Let E = [x1, xr] be a line segment with knots �: x1 < x2 < · · · < xr . A conformalityvector space of degree d on E is defined by
W (d)[E] := {k = (k1,k2, . . . ,kr): L(d)
E = 0},
where L(d)E = 0 is a linear system given by⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
r∑i=1
ki = 0,
r∑i=1
ki xi = 0,
· · ·r∑
i=1
ki xdi = 0.
(2)
It is clear that W (d)[E] is a linear space. The i-th component of k, ki , is the conformality factor corresponding to theknot xi .
For S(m,n,m − 1,n − 1,T ε) and an l-edge E of T ε , the knot sequence of E is determined by the vertices of T ε thatlie on E . If E is a horizontal (vertical) l-edge, the sequence of knots consists of the x-coordinates (y-coordinates) of thesevertices. Therefore, a linear system L(m)
E = 0 (L(n)E = 0) can be defined as Eq. (2). For simplicity, W [E] denotes W (m)[E] or
W (n)[E], where the degree m or n is chosen based on whether E is horizontal or vertical.

502 M. Wu et al. / Computer Aided Geometric Design 29 (2012) 499–509
Fig. 3. Adjacent cells of vi .
Definition 4. (See Wu et al., 2011.) An l-edge E of T ε is called a trivial l-edge of S(m,n,m − 1,n − 1,T ε), if W [E] = 0.
Thus, a horizontal (or vertical) l-edge E is a trivial l-edge of S(m,n,m − 1,n − 1,T ε) if and only if the number ofvertices of T ε on E is no more than m + 1 (or n + 1). A vertex v on an l-edge E of T ε is called a trivial vertex on E if vis the intersection point of E and a trivial l-edge E ′ of T ε . In the following, the definition of conformality vector spaces ofbi-degree (m,n) over T ε is presented.
Definition 5. (See Wu et al., 2011.) Let Ehi , i = 1,2, . . . , p, be all horizontal l-edges of T ε , and E v
j , j = 1,2, . . . ,q, be all
vertical l-edges of T ε . The conformality vector space of bi-degree (m,n) over T ε , W (m,n)[T ε], is given by
W (m,n)[T ε
] := {k = (kv1 ,kv2 , . . . ,kv N ): L(m)
Ehi
= 0, L(n)
E vj= 0, i = 1, . . . , p, j = 1, . . . ,q
},
where v1, v2, . . . , v N are the vertices of T ε and kv�is the conformality factor corresponding to �-th vertex of T ε .
For simplicity, W [T ε] denotes W (m,n)[T ε] in the following.We can define a linear mapping
K : S(m,n,m − 1,n − 1,T ε
) −→ W[T ε
]by K ( f (x, y)) = k f , where the i-th component of k f corresponding to the i-th vertex is the conformality factor of f (x, y)
corresponding to the i-th vertex as defined in Eq. (3) below.Concretely, let Ω1, Ω2, Ω3, Ω4 be the regions occupied by the cells around the i-th vertex vi (shown in Fig. 3). For a
spline function f (x, y) ∈ S(m,n,m−1,n−1,T ε), we denote by f j(x, y) the bivariate polynomial that coincides with f (x, y)
on Ω j , j = 1,2,3,4. Note that if f j1 (x, y) = f j2 (x, y) for two adjacent cells Ω j1 and Ω j2 , then Ω j1 and Ω j2 can be mergedinto a single region, and in this case vi is a T-junction. In Wu et al. (2011), Eq. (3) can be used to compute the conformalityfactor of f (x, y) corresponding to vi .
kvi = 1
m!1
n!∂m+n( f2(x, y) + f4(x, y) − f1(x, y) − f3(x, y))
∂xm∂ yn. (3)
K is determined by Eq. (3).
Theorem 6. (See Theorem 3.3 in Wu et al., 2011.) The mapping K : S(m,n,m − 1,n − 1,T ε) −→ W [T ε] is bijective.
Based on Theorem 6, the construction of a basis for S(m,n,m − 1,n − 1,T ε) can be analyzed by W [T ε]. In Definition 5,(m,n) refers to the degree of S(m,n,m − 1,n − 1,T ε) and d in Definition 3 is similar. Moreover, if T is a T-subdivisionthat is a part of T , T ⊂ T , then
S(m,n,m − 1,n − 1, T ε
) ⊂ S(m,n,m − 1,n − 1,T ε
).
So, there is an embedding,
I : W[T ε
]↪→ W
[T ε
].
By the definition of W [T ε] and W [E], if E is an l-edge of T ε , there is a projection
PE : W[T ε
] −→ W [E],that is defined by keeping the factors associated with the vertices on E of any conformality vector in W [T ε].
Definition 7. Let V E be the set of all vertices of an l-edge E . A conformality vector k ∈ W [T ε] is said to be non-trivial ona set S E ⊆ V E if ∅ �= suppE(k) ⊆ S E , where suppE(k) = {vi ∈ V E : kvi �= 0}.

M. Wu et al. / Computer Aided Geometric Design 29 (2012) 499–509 503
Fig. 4. An example for explaining these concepts, where m = 2, n = 2. (For interpretation of the colors in this figure, the reader is referred to the webversion of this article.)
4. Hierarchical bases
In this section, the surjection condition is presented. Firstly, we introduce some concepts that will then be used through-out Section 4. Secondly, we present a definition of the surjection condition based on these concepts. We then make use ofthis condition to present a general method for the construction of a set of hierarchical basis functions.
4.1. Some concepts
The initial square is denoted by T−1. Let Tl be the hierarchical T-subdivision generated by adding e0, e1, . . . , el to theinitial square, where l � 0. From Tl to Tl+1, when el+1 is added to Tl , let E be the l-edge of T ε
l+1 containing el+1. Suppose
�l+1E : v0 ≺ v1 ≺ · · · ≺ v p
is the non-trivial vertex sequence of E , where “vi ≺ vi+1” means vi is to the left of vi+1 if E is horizontal, or vi below vi+1if E is vertical.
V el+1,E is the vertex set of VT εl+1
defined by
V el+1,E := (VT εl+1
\ VT εl) ∪ Eel+1 ,
where, VT εl+1
, VT εl
are the vertex sets of T εl+1 and T ε
l respectively. Eel+1 is the vertex set of the endpoints of el+1. Thus,V el+1,E ⊆ V E .
�el+1 is called the subsequence of �l+1E with el+1 and it consists of the smallest fragment of v0 ≺ v1 ≺ · · · ≺ v p that
covers V el+1,E . Thus, there are indices i1, i2 such that 0 � i1 < i2 � p and any subsequence of vi1 ≺ vi1+1 ≺ · · · ≺ vi2 cannotcover V el+1,E . Then,
�el+1 : vi1 ≺ vi1+1 ≺ · · · ≺ vi2 .
If an endpoint of el+1 is a boundary vertex of Tl+1, then the l-edge containing el+1 should extend to the boundary ofT ε
l+1, by the definition of an “extended T-subdivision”. Thus, V el+1,E contains vertices other than the endpoints of el+1,E andi2 − i1 > 1 in this case.
Let Πqi : vi ≺ vi+1 ≺ · · · ≺ vi+q+1 denote the i-th subsequence of �l+1
E , where q = m if E is a horizontal l-edge, and q = nif E is a vertical l-edge. If k f i ∈ W [T ε
l+1] is non-trivial on the vertex set consisting of the vertices in Πqi , f i(x, y) is called
a function of Πqi , where f i(x, y) ∈ S(m,n,m − 1,n − 1,T ε
l+1) and k f i = K ( f i(x, y)).As an example, consider Fig. 4, where m = 2, n = 2.
Example 8. el+1 (in red) is added to Tl and E is the l-edge of T εl+1 containing el+1.
1. �l+1E : v0 ≺ v1 ≺ · · · ≺ v5 since v is a trivial vertex of E;
2. �el+1 : v1 ≺ v2;3. q = 2 and Π
qi : vi ≺ vi+1 ≺ vi+2 ≺ vi+3, where i = 0,1,2;
4. A B-spline B0(x, y) ∈ S(2,2,1,1,T εl+1) can be constructed over the yellow domain. The conformality vector of B0(x, y)
is non-trivial on {v0, v1, v2, v3}. Thus, B0(x, y) is a function of Π20 .
We are now able to define the surjection condition.
Definition 9. el+1 is said to be an edge satisfying the surjection condition if there is a function set Fel+1 ⊆ S(m,n,m − 1,
n − 1,T ε ) such that for all Πq that overlap with �e , there exists a unique function of Π
q in Fe .
l+1 i l+1 i l+1
504 M. Wu et al. / Computer Aided Geometric Design 29 (2012) 499–509
Fel+1 is said to be a function set of el+1. From this definition, it is easy to check that the functions in Fel+1 are linearlyindependent.
WT εl+1
[E] denotes the conformality vector space defined by the knot sequence of E , which is determined by all
non-trivial vertices on E of T εl+1, because the conformality factor of a trivial vertex on E is always 0 in view of
PE(W [T εl+1]). By Definition 9, if E1 and E2 are the l-edges of T ε
l and they are parts of E of T εl+1 that cover the ver-
tices v0, v1, . . . , vi1 , vi2 , vi2+1, . . . , v p , then if el+1 satisfies the surjection condition,
WT εl+1
[E] ∼= WT εl[E1] ⊕ WT ε
l[E2] ⊕ span
{PE(k f )
}f ∈Fel+1
. (4)
In Fig. 4, E1 is the l-edge with endpoints v0, v1 and E2 is the l-edge with endpoints v , v5.
Definition 10. Tl is said to be a hierarchical T-subdivision satisfying the surjection condition if e0, e1, . . . , el are the edgessatisfying the surjection condition.
In this paper, a hierarchical T-subdivision that satisfies the surjection condition is also termed a consistent hierarchicalT-subdivision.
4.2. Hierarchical bases over a consistent hierarchical T-subdivision
In this section we make use of the notation given in Section 4.1. In the following, we prove that if all functions in Fel+1
are added to a set of basis functions of S(m,n,m − 1,n − 1,T εl ), the resulting function set is a set of basis functions of
S(m,n,m − 1,n − 1,T εl+1). Thus, by restricting their domain to ΩTl+1 , a set of basis functions of S(m,n,m − 1,n − 1,Tl+1)
is obtained.
Lemma 11. The projection P lE1
: W [T εl ] −→ WT ε
l[E1] is surjective.
Proof. According to the definition of �el+1 , the vertices in the sequence �0: v0 ≺ v1 ≺ · · · ≺ vi1 , which is the subsequence
of �l+1E , are on E1.
Let the vertices in �0 appear in the order v0, v1, . . . , v i1 , where “v i appears” if v i is generated in the current T-subdivision and it is a non-trivial vertex of the l-edge of the current mesh along E1. Suppose that v0, v1, . . . , vd are allthe vertices in �0 that appear in T ε
j0. W [v0, v1, . . . , vd;T ε
j0] is defined by
W[v0, v1, . . . , vd;T ε
j0
] = WT εj0
[E1
1
] ⊕ WT εj0
[E2
1
] ⊕ · · · ⊕ WT εj0
[E
s j01
],
where, E11, . . . , E
s j01 are all the l-edges of T ε
j0which are parts of E1 of T ε
l .
Here, P j0 : W [T εj0] −→ W [v0, v1, . . . , vd;T ε
j0] means
P j0 = PE11⊕PE2
1⊕ · · · ⊕P
Es j01
.
When j0 = −1, no vertex in �0 has appeared on T ε−1. Thus, W [∅;T ε
−1] = 0 and
P−1 : W[T ε
−1
] −→ W[∅;T ε
−1
]is surjective.
Suppose that this lemma is true for j0, where −1 � j0 < l. Then, when e j0+1 is added to T j0 , the following cases areexhaust all possible changes to W [v0, v1, . . . , vd;T ε
j0] and P j0 .
1. No vertex is added to {v0, v1, . . . , vd} and there is no effect on W [v0, v1, . . . , vd;T εj0], i.e.,
W[{vi0 , vi1 , . . . , vid },T ε
j0+1
] = W[{vi0 , vi1 , . . . , vid },T ε
j0
],
then,
P j0+1 : W[T ε
j0+1
] −→ W[v0, v1, . . . , vd,T
εj0+1
]is surjective.
2. No vertex is added to {v0, v1, . . . , vd}, but the l-edge set of T εj0+1 with these vertices on these l-edges is different
from {E1, E2, . . . , Es j0 }. In this case, there are two l-edges in {E1, E2, . . . , E
s j0 } merged into one l-edge connected by e j0+1.
1 1 1 1 1 1
M. Wu et al. / Computer Aided Geometric Design 29 (2012) 499–509 505
There is a function set Fe j0+1 of S(m,n,m − 1,n − 1,T εj0+1) associated with e j0+1 because Tl is a consistent hierarchical
T-subdivision. Thus, the projection
P j0+1 : W[T ε
j0+1
] −→ W[v0, v1, . . . , vd;T ε
j0+1
]is surjective based on the conformality factors of those functions in Fe j0+1 associated with the vertices v0, v1, . . . , vd and
the surjective mapping P j0 : W [T εj0] −→ W [v0, v1, . . . , vd;T ε
j0].
3. There are some vertices vd+1, . . . , vd+d1 added to v0, v1, . . . , vd . For the unique edge e j0+1 inserted into T j0 and
d1 > 0, there is a unique knot sequence of l-edges in {E11, E2
1, . . . , Es j01 } that has been changed. The conformality factors of
the functions associated with e j0+1 and the surjective mapping P j0 : W [T εj0] −→ W [v0, v1, . . . , vd;T ε
j0] show that
P j0+1 : W[T ε
j0+1
] −→ W[v0, v1, . . . , vd, . . . , vd+d1 ;T ε
j0+1
]is surjective.
Thus, P lE1
: W [T εl ] −→ WT ε
l[E1] is surjective. �
For �i2 : vi2 ≺ vi2+1 ≺ · · · ≺ v p , we obtain a similar result, i.e.,
P lE2
: W[T ε
l
] −→ WT εl[E2]
is surjective.
Lemma 12. Tl+1 is a consistent hierarchical T-subdivision. P l+1E : W [T ε
l+1] −→ WT εl+1
[E] is surjective and W [T εl+1] ∼= W [T ε] ⊕
WT εl+1
[E], where T ε is a T-subdivision generated by deleting {E1, E2} from T εl .
Proof. As in the case 2 of the proof of Lemma 11, P l+1E : W [T ε
l+1] −→ WT εl+1
[E] is surjective.
Moreover, W [T εl+1] ∼= W [T ε] ⊕ WT ε
l+1[E] can be obtained from the short exact sequence
0 −→ W[T ε
] I−→ W[T ε
l+1
] Pl+1−→ WT εl+1
[E] −→ 0, (5)
where, I is the natural embedding. The proof that “the sequence (5) is exact” is the same as that of Theorem 4.3 in Wuet al. (2011). �Theorem 13. Let Bl be a set of basis functions of W [T ε
l ] and {k f } f ∈Fel+1be a set of conformality vectors of Fel+1 , then Bl+1 =
Bl ∪ {k f } f ∈Fel+1is a set of basis functions of W [T ε
l+1], where Bl ⊂ W [T εl+1] is induced by the embedding I : W [T ε
l ] ↪→ W [T εl+1].
Proof. By Lemma 12,
W[T ε
l+1
] ∼= W[T ε
] ⊕ WT εl+1
[E],
where T ε is a T-subdivision generated by deleting E1, E2 from T εl . By Lemmas 11 and 12,
W[T ε
l
] ∼= W[T ε
] ⊕ WT εl[E1] ⊕ WT ε
l[E2].
By Eq. (4),
WT εl+1
[E] ∼= WT εl[E1] ⊕ WT ε
l[E2] ⊕ span
{PE(k f )
}f ∈Fel+1
,
where k f is the conformality vectors of f (x, y) ∈ Fel+1 .It follows that,
W[T ε
l+1
] ∼= W[T ε
l
] ⊕ span{k f } f ∈Fel+1,
i.e., Bl+1 = Bl ∪ {k f } f ∈F is a set of basis functions of W [T ε ]. �
el+1 l+1
506 M. Wu et al. / Computer Aided Geometric Design 29 (2012) 499–509
Fig. 5. An example for generating T3,3 from a tensor-product mesh progressively.
From Theorems 13 and 6, we obtain the following result.
Theorem 14. If Bl is a set of basis functions of S(m,n,m − 1,n − 1,T εl ) and Fel+1 is a function set of el+1 , a set of basis functions
of S(m,n,m − 1,n − 1,T εl+1) can be constructed from Bl ∪ Fel+1 .
Thus,
S(m,n,m − 1,n − 1,T ε
l+1
) = span B−1 ⊕ span Fe0 ⊕ span Fe1 ⊕ · · · ⊕ span Fel+1 . (6)
The added functions are similar to the “hierarchical bases” (Yserentant, 1986, Bank, 1997, Krysl et al., 2003) in finiteelement analysis. Thus, these bases of S(m,n,m − 1,n − 1,T ε
l+1) are called hierarchical bases of S(m,n,m − 1,n − 1,T εl+1).
They may also be regarded as hierarchical bases of S(m,n,m − 1,n − 1,Tl+1) by restricting their domains.Moreover, the number of functions in Fel+1 is determined by the number of the non-trivial vertices on the l-edge
containing el+1 in T εl+1. Thus, the dimension of S(m,n,m − 1,n − 1,Tl+1) is geometric independent.
Theorem 14 can also be used to discuss the relationship between a spline space with highest order smoothness overa hierarchical T-subdivision and a spline space spanned by all the LR B-splines (Dokken et al., 2012) over this hierarchicalT-subdivision. For example, the spline space spanned by all the LR B-splines over T ε
l+1 with all its edges of multiplicity one
is S(m,n,m − 1,n − 1,T εl+1), when {Fei }l+1
i=0 are sets of B-splines in Theorem 14.
5. Examples
In this section, examples of bicubic hierarchical bases over T3,3 (Wu et al., 2011) and an application of these bases to atwo-dimensional elliptic boundary value problem are presented.
5.1. Bicubic hierarchical bases over T3,3
With a given order of edges during each step of subdivision, we can modify the basis functions of S(3,3,2,2,T ) pre-sented in Wu et al. (2011) to give hierarchical bases over T3,3.
In Fig. 5, we show an example of T3,3 that is generated progressively from a tensor-product mesh. The strict definitionof T3,3 and Tm,n can be obtained from Wu et al. (2011). By connecting the middle points of the opposite edges with twostraight lines, a cell in the previous mesh is refined into four new cells. If one of the four cells is refined, the other threecells should be refined as well.
Thus, we reach the conclusion as follows.
Theorem 15. (See Lemma 4.2 and Theorem 4.3 in Wu et al., 2011.) Let Tm,n be a hierarchical T-subdivision associated with (m,n),and T ε
m,n be its extended T-subdivision. EL is the set of all the interior l-edges of T εm,n. Then, the l-edges in EL can be ordered as
Et , Et−1, . . . , E1 such that the projection mapping
PEi : W[T ε
i
] −→ WT εi[Ei]
is surjective, and
W[T ε
i
] ∼= W[T ε
i+1
] ⊕ WT εi[Ei],
where i = 1,2, . . . , t. Here T εi is the T-subdivision obtained by deleting {E1, . . . , Ei−1} from T ε
m,n, and Ei ⊂ T εi is regarded as an
l-edge in T εi .
In Wu et al. (2011), the set of bicubic basis functions over T3,3 is constructed in such a way as to be associatedwith each l-edge Ei of T3,3 by Theorem 15. However, we cannot insert an l-edge to the current mesh in order to satisfylocal refinement in applications. Thus, based on the results given this paper, hierarchical bases can be constructed using agiven order of the edges added to the current mesh. If all the divided cells do not intersect with the boundary of T3,3,

M. Wu et al. / Computer Aided Geometric Design 29 (2012) 499–509 507
Fig. 6. An order of inserting edges during a step of subdivision.
Fig. 7. An example of constructing hierarchical bases associated with an edge. (For interpretation of the colors in this figure, the reader is referred to theweb version of this article.)
an order for inserting edges is shown in Fig. 6. If there is a cell intersecting with the boundary of T3,3, the similar ordercan be defined as the one in Fig. 6 (from left to right and then from top to bottom) by the definition of extended T-subdivisions.
With the order given Fig. 6, we will illustrate the process of constructing bicubic hierarchical bases.Fig. 7 shows the progress of adding one of these 12 edges to the current mesh in the order defined in Fig. 6. el+1 (in
red) is added to Tl , E is the l-edge of T εl+1 containing el+1. From this figure,
�E : v0 ≺ v1 ≺ · · · ≺ v5 ≺ v6;�el+1 : v5 ≺ v6;Π3
i : vi ≺ vi+1 ≺ vi+2 ≺ vi+3 ≺ vi+4, i = 0,1,2.
and there is a unique Π3i (i = 2) overlap with �el+1 . The B-spline B(x, y) can be constructed over the yellow domain which
is a function of Π32 . Then,
Fel+1 = {B(x, y)
}.
If Bl is a set of basis functions of S(3,3,2,2,T εl ), then
Bl+1 = Bl ∪ Fel+1
is a set of basis functions of S(3,3,2,2,T εl+1).
5.2. An application in finite element analysis
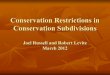
In this section, we consider a two-dimensional elliptic boundary value problem (BVP) as the model problem. In thissolution process, the finite element space is chosen to be S(m,n,m − 1,n − 1,T3,3), with a hierarchical basis over T3,3.
The strong form of the BVP is as follows. Find u : Ω −→ R, such that
−�u = f in Ω,
u = 0 on ∂Ω,
where f = 104[3(1 − x)(1 − y)x4 y4(x2 + y2) − 1.2x5 y5(x − x2 + y − y2)], Ω is a rectangular domain [0,1] × [0,1] ⊂ R2 and
its boundary is denoted as ∂Ω .

508 M. Wu et al. / Computer Aided Geometric Design 29 (2012) 499–509
Fig. 8. Finite element solutions of the model problem.
The technique of finite element analysis begins by defining a weak form of the model BVP which can be stated as follows.Given f and h, find u ∈ V , such that for all v ∈ V ,
a(u, v) = l(v), (7)
where V = {u: u ∈ H1(Ω), u|∂Ω = 0}, H1(Ω) is the Sobolev space that consists of the functions in L2(Ω) that possess weakand square-integrable derivatives. a(u, v) is the symmetric bilinear form defined as
a(u, v) =∫Ω
∇u · ∇v dΩ,
l(v) is a linear functional defined as
l(v) =∫Ω
f v dΩ.
We discretize the weak form, Eq. (7), with hierarchical bases over T3,3. The linear system
Ad = F (8)
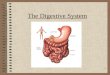
is obtained, where A is the stiffness matrix, F is the force vector and d is the displacement vector. The refinement is drivenby the adaptive strategy in Wang et al. (2011a). The solution of the weak form of Eq. (7) is plotted in Fig. 8. Fig. 9 gives asequence of adaptive refinement meshes as the solution progress.
6. Conclusions and future work
We have proposed a method for constructing hierarchical bases of a spline space with highest order smoothness over aconsistent T-subdivision. The hierarchical bases are generated by adaptive refinement of the T-subdivision. These bases havea natural hierarchical structure. We have also presented a numerical example to illustrate the application of non-negativehierarchical bases in adaptive finite element analysis.
In future work, we will choose an adaptive-suitable, consistent T-subdivision and a set of hierarchical basis functionsthat are suitable for adaptive finite element analysis and adaptive isogeometric analysis. The application of these bases inadaptive finite element analysis and adaptive isogeometric analysis will be explored, not only through examples, but alsowith a theoretical analysis.
Acknowledgements
We would like to thank the anonymous reviewers for their comments and suggestions which greatly improve themanuscript. The authors are supported by the NBRPC 2011CB302400, the NSF of China (11031007, 61073108, 11171322and 10901149), Program for New Century Excellent Talents in University (NCET-11-0881), and the 111 Project (No.b07033).

M. Wu et al. / Computer Aided Geometric Design 29 (2012) 499–509 509
Fig. 9. Adaptive refinement meshes.
References
Bank, R.E., 1997. Hierarchical bases and the finite element method. Acta Numerica.Brenner, S., Scott, L.R., 2002. The Mathematical Theory of Finite Element Methods. Springer, New York.Deng, J., Chen, F., Feng, Y., 2006. Dimensions of spline spaces over T-meshes. Journal of Computational and Applied Mathematics 194, 267–283.Deng, J., Chen, F., Jin, L., 2008a. Dimensions of biquadratic spline spaces over T-meshes. Preprint, arXiv:0804.2533 [math.NA].Deng, J., Chen, F., Li, X., Hu, C., Tong, W., Yang, Z., Feng, Y., 2008b. Polynomial splines over hierarchical T-meshes. Graphical Models 74 (4), 76–86.Dokken, T., Lyche, T., Pettersen, K.F., 2012. Locally refinable splines over box-partitions. Preprint, http://www.sintef.no/upload/IKT/9011/geometri/LR-splines%
20SINTEF%20Preprint%20-%20signatures.pdf.Hughes, T., Cottrell, J., Bazilevs, Y., 2005. Isogeometric analysis: CAD, finite elements, NURBS, exact geometry and mesh refinement. Computer Methods in
Applied Mechanics and Engineering 194, 4135–4195.Krysl, P., Grinspun, E., Schroder, P., 2003. Natural hierarchical refinement for finite element methods. Int. J. Numer. Meth. Engrg. 56, 1109–1124.Mourrain, B., 2010. On the dimension of spline spaces on planar T-subdivisions. Preprint, http://hal.inria.fr/docs/00/53/31/87/PDF/paper.pdf.Nguyen-Thanh, N., Kiendl, J., Nguyen-Xuan, H., Wuchner, R., Bletzinger, K.U., 2011a. Rotation free isogeometric thin shell analysis using PHT-splines. Com-
puter Methods in Applied Mechanics and Engineering 200, 3410–3424.Nguyen-Thanh, N., Nguyen-Xuan, H., Bordas, S.P.A., Rabczuk, T., 2011b. Isogeometric analysis using polynomial splines over hierarchical T-meshes for two-
dimensional elastic solids. Computer Methods in Applied Mechanics and Engineering 200, 1892–1908.Wang, R., 1979. On the analysis of multivariate splines in the case of arbitrary partition. Scientia Sinica.Wang, P., Xu, J., Deng, J., Chen, F., 2011a. Adaptive isogeometric analysis using rational PHT-splines. Computer-Aided Design 43 (11), 1438–1448.Wang, J., Yang, Z., Jin, L., Deng, J., Chen, F., 2011b. Parallel and adaptive surface reconstruction based on implicit PHT-splines. Computer Aided Geometric
Design 28, 463–474.Wu, M., Deng, J., Chen, F., 2011. The dimension of spline spaces with highest order smoothness over hierarchical T-meshes. Preprint, http://arxiv.org/abs/
1112.1144.Yserentant, H., 1986. On the multi-level splitting of finite element spaces. Numer. Math. 49, 379–412.