-
Hedonic Coalition Formation Game for CooperativeSpectrum Sensing
and Channel Access in
Cognitive Radio NetworksXiaolei Hao, Man Hon Cheung, Vincent
W.S. Wong, Senior Member, IEEE, and
Victor C.M. Leung, Fellow, IEEE
Abstract—Cooperative spectrum sensing is an effective tech-nique
to improve the sensing performance and increase thespectrum
efficiency in cognitive radio networks (CRNs). In thispaper, we
consider a CRN with multiple primary users (PUs) andmultiple
secondary users (SUs). We first propose a cooperativespectrum
sensing and access (CSSA) scheme for all the SUs,where the SUs
cooperatively sense the licensed channels of thePUs in the sensing
subframe. If a channel is determined to beidle, the SUs which have
sensed that channel will have a chanceto transmit packets in the
data transmission subframe. We thenformulate this multi-channel
spectrum sensing and channel accessproblem as a hedonic coalition
formation game, where a coalitioncorresponds to the SUs that have
chosen to sense and access aparticular channel. The value function
of each coalition and theutility function of each SU take into
account both the sensingaccuracy and the energy consumption. We
propose an algorithmfor decision node selection in a coalition.
Moreover, we proposean algorithm based on the switch rule to allow
the SUs to makedecisions on whether to join or leave a coalition.
We proveanalytically that the set with all the SUs converges to a
finalnetwork partition, which is both Nash-stable and
individuallystable. Besides, the proposed algorithms are adaptive
to changesin network conditions. Simulation results show that our
proposedCSSA scheme achieves a better performance than the
closestPU (CPU) scheme and the noncooperative spectrum sensing
andaccess (NSSA) scheme in terms of the average utility of the
SUs.
Index Terms—Cognitive radio networks, coalitional game the-ory,
hedonic coalition formation, cooperative spectrum sensing.
I. INTRODUCTION
SPECTRUM resources are scarce and fixed spectrum al-location may
not always be efficient [2]. This motivatesthe concept of cognitive
radio [3], which allows unlicensedusers (secondary users) to
dynamically and opportunistically
Manuscript received on October 8, 2011; revised on April 6, 2012
and June29, 2012; and accepted on August 6, 2012. This work was
supported by theNatural Sciences and Engineering Research Council
(NSERC) of Canada. Partof this paper was presented at the IEEE
Global Communications Conference(Globecom’11), Houston, TX, Dec.
2011 [1]. The review of this paper wascoordinated by Prof. Natasha
Devroye.
X. Hao is with TELUS Mobility, Vancouver, Canada, e-mail:
[email protected].
M. H. Cheung is with the Department of Information Engineering,
theChinese University of Hong Kong, Hong Kong, China, e-mail:
[email protected]. This work was completed when X. Hao and
M. H.Cheung were with the Department of Electrical and Computer
Engineering,University of British Columbia, Vancouver, BC, Canada,
V6T 1Z4.
V. W. S. Wong and V. C. M. Leung are with the Department of
Electricaland Computer Engineering, University of British Columbia,
Vancouver, BC,Canada, V6T 1Z4, e-mail: {vincentw,
vleung}@ece.ubc.ca.
access the licensed bands allocated to the legacy
spectrumholders (primary users) when the spectrum is not being
utilizedtemporarily. Cooperation techniques, such as cooperative
com-munication [4], [5], can be used in cognitive radio
networks(CRNs). In order to enable dynamic spectrum access in
CRNs,spectrum sensing [6] is performed. In local spectrum
sensing,the secondary users (SUs) are required to sense the
radioenvironment within their operating range to find the
spectrumwhich is not occupied by the primary users (PUs).
However,it can be susceptible to sensing problems due to
multipathfading, shadowing, and receiver uncertainty [6]. To
enhancethe sensing performance of local spectrum sensing, the
ideaof cooperative spectrum sensing was proposed that exploitsthe
spatial diversity in the observations of spatially locatedSUs
[6]–[8]. In [9], Liang et al. studied cooperative sensingby
formulating the sensing-throughput tradeoff problem asan
optimization problem. In [10], Saad et al. introduced adistributed
model for cooperative spectrum sensing in CRNs.The cooperative
sensing problem was modeled as a coalitionalgame, and distributed
algorithms were proposed for coalitionformation. In [11], Lee et
al. proposed an adaptive andcooperative spectrum sensing method,
and investigated howthe cooperative sensing affects the performance
of the pro-posed optimal spectrum sensing scheme. In [12], Wang et
al.proposed a distributed scheme for cooperative
multi-channelspectrum sensing based on coalitional game theory. A
coalitionselection scheme was proposed, where each channel is
sensedby one coalition. In [13], Song et al. studied the
theoreticalimprovement of the multi-channel coordination in
cooperativespectrum sensing. They proposed practical centralized
algo-rithm and distributed algorithms to find the solutions for
theformulated integer programming problem. Channel utilizationand
energy consumption are considered in spectrum sensing.In [14], Zhao
et al. proposed a periodic sensing opportunisticspectrum access
scheme. The constrained Markov decisionprocesses were used to
maximize channel utilization whilelimiting the interference with
the PUs. In [15], Su et al.proposed a spectrum sensing scheme for
CRNs to save thesensing energy consumption, and guarantee the
priority of thePUs and the spectrum opportunity for SUs.
In general, there are multiple PUs (i.e., multiple
licensedchannels) and multiple SUs in a CRN. It is important
todetermine which channel each SU should sense and access bytaking
into account the sensing accuracy [16], [17] and energyconsumption
[18]. Moreover, it is more practical if we also
-
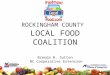
(a) Sensing subframe with duration δ (b) Sensing decision (c)
Data transmission subframe with duration T −δ
Fig. 1. An example of our system model and the proposed CSSA
scheme with M = 2 and N = 4, where the blue and red colours denote
the operationsin channels 1 and 2, respectively. (a) Each ST senses
one licensed channel during the sensing subframe. (b) When the
sensing time δ expires, each ST sendsits sensing result to one of
the STs in that channel that acts as a DN. (c) If the channel is
determined to be idle by the DN, one of the STs in that channelcan
transmit data to the corresponding secondary receiver in the data
transmission subframe.
consider channel access after spectrum sensing. Therefore,we
consider a framework in CRNs that considers spectrumsensing
accuracy, energy consumption, and channel access forthe SUs.
Algorithms are proposed which allow each SU tomake its own decision
on which channel to sense and access.Also, they enable the SUs to
adapt to different changes innetwork conditions, such as the
deployment of new PUs andSUs, the removal of existing PUs and SUs,
and the change inwireless channel conditions.
In this paper, we study cooperative spectrum sensing andchannel
access in CRNs with multiple channels. We assumethat a SU first
chooses a channel to sense locally in the sensingsubframe. Then,
all the SUs that choose to sense the samechannel cooperatively
determine the channel status. If it isdetermined to be idle, one of
the SUs which has sensed thatchannel can access it during the data
transmission subframe.We consider both the spectrum sensing
accuracy and energyconsumption in our model, and analyze the
behavior of theSUs by using hedonic coalition formation game
[19]–[21]. Themain contributions of this paper are summarized as
follows:
• We propose a cooperative spectrum sensing and access(CSSA)
scheme for the SUs in a CRN, where there aremultiple licensed
frequency channels.
• We formulate the cooperative multi-channel spectrumsensing and
access problem as a hedonic coalition for-mation game, where the
value function of each coalitionand the utility function of each SU
take into account boththe sensing accuracy and energy
consumption.
• In order for the SUs to make decisions to join or leave
acoalition, we propose algorithms for the CSSA scheme.We prove
analytically that the final partition is Nash-stable, where no SU
has an incentive to move from itscurrent coalition to another
coalition.
• Simulation results show that our CSSA scheme achieves abetter
performance than the closest PU (CPU) scheme andthe noncooperative
spectrum sensing and access (NSSA)scheme. The proposed algorithms
are adaptive to changesin network settings.
Our proposed framework is more practical as comparedwith some of
the previous works in spectrum sensing. In the
system model, we consider the general case where there
aremultiple licensed channels in the CRN, while the works in
[9],[10], [15] only analyzed the scenario with only one channelin
the network. Besides, the energy efficiency is always aconcern in
practice. Therefore, we take energy consumptioninto consideration
for spectrum sensing and channel access inCRNs. However, the works
in [9]–[14] did not consider energyconsumption. In terms of
spectrum sensing accuracy, we applycooperative spectrum sensing in
our proposed CSSA scheme.Compared to the work in [14], [15] which
only consideredlocal spectrum sensing, our CSSA scheme can further
improvethe sensing performance. Moreover, while previous works
onlyfocused on spectrum sensing and ignored channel access
(e.g.,[10], [12]), we consider both spectrum sensing and
channelaccess in our CSSA scheme, and analyze the performanceof the
system by using hedonic coalition formation game,which has not been
applied to study the cooperative spectrumsensing and channel access
in CRNs. We present a completeframework for the CRN, and propose
algorithms for our CSSAscheme.
The remainder of this paper is organized as follows. Sec-tion II
describes the system model and the CSSA scheme.The proposed
cooperative multi-channel spectrum sensing andchannel access
problem is modeled as a hedonic coalitionformation game in Section
III. In Section IV, we present thealgorithms for coalition
formation. In Section V, we discussthe nontransferable utility
(NTU) approach for the coalitionalformation game. Section VI
presents the simulation results.Conclusions are given in Section
VII.
II. SYSTEM MODEL AND CSSA SCHEME
As shown in Fig. 1(a), we consider a CRN with one accesspoint
(AP), M PUs, and N secondary transmitter-receiver (ST-SR) pairs. In
this paper, since the secondary transmitter (ST) isresponsible for
spectrum sensing and data transmission, we usethe term ST and SU
interchangeably. LetM = {1, . . . ,M} bethe set of PUs and N = {1,
. . . , N} be the set of STs. EachPUi, i ∈ M has its own licensed
channel with bandwidthBi. Thus, there are M non-overlapped channels
in total. TheM PUs are sending data to the AP. The N ST-SR pairs
are
-
located in the same area as the PUs, where each STj , j ∈ Nseeks
to exploit possible transmission opportunities in one ofthe M
channels of the PUs. We assume that each STj alwayshas data to send
and no traffic requirement is imposed on theSTs. In other words,
each STj transmits data in a best-effortmanner.
We consider a frame structure for periodic spectrum sens-ing,
where each time frame consists of one sensing subframe1
and one data transmission subframe2 as shown in the bottompart
in Fig. 1(a)-(c). We use T to denote the frame duration.All SUs
have the same spectrum sensing duration, and we useδ, where 0 <
δ ≤ T , to denote the spectrum sensing time ofthe SUs. Therefore,
the data transmission duration is T − δ.Notice that in a practical
system, a short duration between thesensing and data transmission
subframes is required for thecollection of the sensing results and
the data fusion. However,its duration is much shorter than the time
required for sensingand transmission. The received signal of the
PUs is sampledat sampling frequency fs at STj , ∀ j ∈ N . In
addition, δ is amultiple of 1/fs. Thus, the number of samples is
δfs, whichis an integer. We also assume that T is a multiple of
1/fs.
We consider narrowband sensing, where each SU choosesto sense
one channel in each time frame. Let H1,i and H0,ibe the hypothesis
that PUi, i ∈ M is active and inactive,respectively. For j ∈ N ,
STj performs spectrum sensingin the channel of PUi and determines
the probabilities ofdetection and false alarm. The probability of
detection is theprobability of correctly detecting the appearance
of PUi underhypothesis H1,i (i.e., a busy channel is determined to
be busycorrectly). The probability of false alarm is the
probability offalsely declaring the appearance of the primary
signal underhypothesisH0,i (i.e., an idle channel is determined to
be busy).
We assume the noise in the channel of PUi, i ∈ M is
anindependent and identically distributed (iid) random processwith
zero mean and variance σ2n,i. Given the power spectraldensity N0,
we have σ2n,i = N0Bi. The primary signal of PUiis an iid random
process with zero mean and variance σ2s,i.The primary signal of PUi
is independent of other primarysignals and the noise. We denote
γi,j = |gi,j |2σ2s,i/σ2n,i as thereceived signal-to-noise ratio
(SNR) of PUi, i ∈M measuredat STj , j ∈ N under the hypothesis
H1,i, where |gi,j | is theaverage channel gain of the link between
PUi and STj inchannel i. We use ε to denote the detection threshold
for all theSTs. We consider the circularly symmetric complex
Gaussian(CSCG) noise case. We also assume that the primary signal
iscomplex phase shift keying (PSK) modulated signal. With theuse of
energy detection [6], [23], under hypothesis H0,i, theprobability
of false alarm [9] in channel i ∈M by STj is
Pf,i,j(ε, δ, σ2n,i) = Pr(yj,i > ε |H0,i)
= Q
((ε
σ2n,i− 1)√
δfs
), (1)
1The duration of the sensing subframe δ is less than 15 ms when
theduration of each frame T is 100 ms [9], [22].
2During the data transmission subframe, the SU can transmit
multiplepackets. When T is equal to 100 ms and δ is equal to 2.5
ms, the datatransmitted in the data transmission subframe is about
600 kbits [9].
where yj,i is the test statistic for energy detector of STj
inchannel i, and Q is the complementary distribution functionof the
standard Gaussian. If ε and δ are the same for all theSUs, and the
bandwidth Bi are the same for all the PUs, thenPf,i,j(ε, δ, σ
2n,i) are the same ∀ i ∈ M, ∀ j ∈ N . Moreover,
under hypothesis H1,i, the probability of detection in channeli
∈M by STj , j ∈ N is
Pd,i,j(ε, δ, σ2n,i, γi,j) = Pr(yj,i > ε |H1,i)
= Q
((ε
σ2n,i− γi,j − 1
)√δfs
2γi,j + 1
).
(2)
It has been reported that the hidden node problem, deepfading
and shadowing can degrade the performance of localspectrum sensing
of individual SU [6], [24]. To overcomethis problem, cooperative
spectrum sensing was proposed,where the SUs combine their local
sensing results. In oursystem model, each SU first chooses to sense
the channelindependently, and then sends its spectrum sensing
result tothe decision node (DN) for that channel when the sensing
timeδ expires. Among those STj , j ∈ N which choose to sensechannel
i ∈ M, DNi is selected according to Algorithm 1,which will be
presented in Section IV. The DNi will combinethe sensing results of
the SUs which choose to sense channeli, and determine the status
(i.e., busy or idle) of channel i.We consider an example shown in
Fig. 1, where there aretwo channels and four ST-SR pairs. At the
beginning of eachframe, as shown in Fig. 1(a), ST1 and ST2 start
sensing thechannel of PU1 in channel 1, and ST3 and ST4 start
sensingthe channel of PU2 in channel 2. In Fig. 1(b), ST1 and
ST3serve as the DN1 and DN2, respectively. Each SU will sendits
spectrum sensing decision to the corresponding DNi whenits sensing
time δ expires. The DNi makes the final spectrumsensing decision
for the channel i ∈M.
The decision node decides on the channel status based ona
decision fusion rule to combine the sensing results of theSUs [9].
We consider k-out-of-n rule [25], where DN decidesthe presence of
primary activity if there are k or more SUsthat individually detect
the presence of primary activity. Fork = 1, k = n, and k ≥ n/2,
k-out-of-n rule becomes theOR rule, AND rule, and majority rule,
respectively [6]. Weassume that the local decisions made by the SUs
in the samechannel are independent. Let Si be the set of SUs that
chooseto sense and access channel i. We have Si ⊆ N , ∀ i ∈
Mand
⋃i∈M Si = N . Since we assume that STj , ∀ j ∈ N
can choose to sense only one channel in each frame, we haveSi ∩
Sl = ∅, ∀ i, l ∈ M, i 6= l. Let Pf,i be the probabilityof false
alarm under the hypothesis H0,i, and let Pd,i be theprobability of
detection under the hypothesis H1,i in channeli ∈ M. As an example,
when the OR rule (i.e., k = 1) isused, they are given by
Pf,i = 1−∏j∈Si
(1− Pf,i,j(ε, δ, σ2n,i)
), (3)
Pd,i = 1−∏j∈Si
(1− Pd,i,j(ε, δ, σ2n,i, γi,j)
). (4)
For the channel i ∈M, we denote PH1,i as the probabilitythat PUi
is active, and PH0,i as the probability that PUi
-
is silent. Therefore, we have PH1,i + PH0,i = 1. If DNideclares
that PUi is active, then STj , ∀ j ∈ Si cannot transmitdata during
the data transmission subframe. However, if DNideclares that
channel i is idle, then each STj , j ∈ Si hasa chance to access the
channel i with equal probability. Inthis way, the transmissions of
the SUs do not interfere witheach other. Therefore, under the
decision that channel i isidle, one SU is chosen to transmit data
among all the SUsin Si. The transmission probability of STj , j ∈
Si is 1/|Si|,and the transmission time is T − δ. As an example
shownin Fig. 1(c), ST1 and ST2 seek to access the channel of
PU1(solid arrows), and ST3 and ST4 seek to access the channel ofPU2
(dash arrows). If DNi declares that channel i is idle andPUi is
actually silent, then the secondary data transmissionin channel i
will be successful. However, if DNi determinesthat channel i is
idle but PUi is actually active (i.e., a misseddetection), then the
secondary data transmission in channel iwill interfere with PUi’s
transmission. In this case, when thecollision of PUi’s packets is
detected at the AP, we assumethat the SUs will be charged D0 > 0
by the AP at theend of the data transmission subframe as a penalty
for theinterference, where D0 can be chosen to map the level of
theperformance degradation of the PU to the penalty value of
theSUs.
Given the system model and the CSSA scheme describedabove, when
the sensing duration δ is fixed, it is importantto determine which
channel each SU should choose to senseand access in order to
achieve the optimal performance. Inthe following sections, we will
propose algorithms to solvethis spectrum sensing and access problem
by using coalitionalgame theory. Note that our algorithms can be
applied directlyto a more general system model, which is not
restricted to theuse of PSK modulated signal for transmission and
the OR rulefor data fusion.
III. HEDONIC COALITION FORMATION GAME
In this section, we formulate the problem of
multi-channelenergy-efficient cooperative spectrum sensing and
access as ahedonic coalition formation game. We apply the switch
rulefor the SUs to make decisions on whether to join or leave
acoalition. We prove that the hedonic coalition formation
gamealways terminates at the final partition that is both
Nash-stableand individually stable.
A. Value Function and Utility Function
In our system model, there are M non-overlapped channelsand N
SUs in the CRN. In order to exploit the possibletransmission
opportunities in the M channels with differentchannel conditions,
each SU should carefully make its owndecision on which channel it
should sense and access duringeach time frame by taking into
account both the sensingaccuracy and energy consumption. For the
sensing accuracy,it affects the amount of data transmitted by the
SUs duringthe data transmission subframe and the penalty charged
bythe PUs for interfering with their transmission. For the
energyconsumption of the SUs, it is an important design criterion
forspectrum sensing and data transmission in practice.
According to the CSSA scheme presented in Section II,there are
four different scenarios related to the activity of thePUi and the
decision of DNi in channel i ∈M. We presentthe payoff, energy
consumption, and the probability that eachscenario occurs as
follows:
Scenario 1: PUi is silent and the decision made by DNiis not a
false alarm. In this scenario, STj , ∀ j ∈ Si transmitsdata during
the data transmission subframe successfully. Giventhe signal
transmit power Pt, the noise power σ2n,i in channeli, and the
average channel gain |hj,i| of the link between theST-SR pair j in
channel i, the transmission rate Rj,i of STjcan be modeled as
[26]:
Rj,i = Bi log2
(1 + |hj,i|2
Ptσ2n,i
). (5)
The payoff of set Si is defined as the reward (i.e., theamount
of data transmitted by the SUs in Si) minus thepenalty (i.e., the
payment required by the SUs in Si forinterfering with PUi’s
transmission) in the data transmissionsubframe. Since the
transmission of the SUs is successfuland the penalty is zero, the
payoff of set Si is given byv0|0,D(Si) =
∑j∈Si
Rj,i
|Si| (T − δ). The energy consumption ofset Si is given by
v0|0,E(Si) = Ps|Si|δ + Pt(T − δ), wherePs is the sensing power of
STj , ∀ j ∈ N . The terms Ps|Si|δand Pt(T − δ) represent the energy
consumption for spectrumsensing and data transmission,
respectively. The probabilitythat scenario 1 will occur is P0|0,i =
PH0,i(1− Pf,i).
Scenario 2: PUi is silent and the decision made by DNiis a false
alarm. In this scenario, since STj , ∀ j ∈ Si doesnot transmit
during the idle data transmission subframe, andthere is no
interference with the PU, the payoff of set Siis v1|0,D(Si) = 0,
and the energy consumption of set Si isv1|0,E(Si) = Ps|Si|δ. The
probability that this scenario willoccur is P1|0,i = PH0,iPf,i.
Scenario 3: PUi is active and DNi fails to detect thepresence of
the primary signal. In this scenario, both PUiand STj , j ∈ Si
transmit data during the data transmissionsubframe, so they
interfere with each other. We assume thattheir transmitted packets
are corrupted, so the reward is zero.Thus, the payoff of set Si is
v0|1,D(Si) = −D0(T − δ),where D0 > 0 is the unit penalty per
second for interferingwith the PU’s data transmission. Notice that
the penalty termD0(T − δ) is decreasing with the duration of the
sensingsubframe δ. Besides, the energy consumption of set Si
isv0|1,E(Si) = Ps|Si|δ + Pt(T − δ), which is the same as thatin
scenario 1. The probability that scenario 3 will occur isP0|1,i =
PH1,i(1− Pd,i).
Scenario 4: PUi is active and DNi detects the presence ofthe
primary signal. In this scenario, STj , ∀ j ∈ Si does nottransmit
data during the data transmission subframe. Sincethe reward and
penalty are both zero, the payoff of set Siis v1|1,D(Si) = 0, and
the energy consumption of set Si isv1|1,E(Si) = Ps|Si|δ. The
probability that scenario 4 willoccur is given by P1|1,i =
PH1,iPd,i.
According to the above analysis for the four scenarios, the
-
expected payoff for set Si in each frame of duration T is
vD(Si) =1∑a=0
1∑b=0
Pa|b,iva|b,D(Si)
= P0|0,i
∑j∈Si
Rj,i
|Si|(T − δ)− P0|1,iD0(T − δ). (6)
The expected energy consumption in set Si in each frame
ofduration T is
vE(Si) =1∑a=0
1∑b=0
Pa|b,iva|b,E(Si)
= Ps|Si|δ + (P0|0,i + P0|1,i)Pt(T − δ). (7)We define the value
function of set Si as the ratio of vD(Si)
to vE(Si), which represents the expected payoff achieved perunit
of energy consumed in set Si:
v(Si) ,vD(Si)vE(Si)
=
P0|0,i∑j∈Si
Rj,i(T − δ)− |Si|P0|1,iD0(T − δ)
|Si|(Ps|Si|δ + (P0|0,i + P0|1,i)Pt(T − δ)
) . (8)In fact, by tuning the value D0 in the value function,
differentdegrees of tradeoff between the energy efficiency of the
CSSAscheme and the protection of the PU’s transmission can
beachieved. Specifically, when D0 = 0, v(Si) is equal to theenergy
efficiency (i.e., the expected amount of data transmittedby the SUs
divided by the expected energy consumption) ofthe CSSA scheme. On
the other hand, when D0 is large,more importance is placed on
protecting the PU from theinterference of the SUs. Moreover, from
(8), the value functiontakes into account the sensing accuracy by
considering thesensing results related to false alarm (i.e., P0|0,i
is related toPf,i) and detection (i.e., P0|1,i is related to Pd,i).
The value ofv(∅) is chosen such that v(Si) > v(∅), ∀Si ⊆ N and
Si 6= ∅.
Since all the SUs in set Si perform spectrum sensing andaccess
channel i with equal probability, they should receivethe same
utility. The utility function of STj , ∀ j ∈ Si is thusgiven by
xSij =v(Si)|Si|
. (9)
Given the M non-overlapped channels and N SUs in oursystem
model, each SU will make its own decision on whichchannel it should
sense and access during each time frame sothat it can achieve the
best performance in terms of the utilitydefined in (9). Notice that
the utility of each player does notcorrespond to a physical
quantity that can be divided amongthe players in a coalition.
Rather, it represents a performancemetric that each player aims to
optimize as in [21].
B. Hedonic Coalition Formation Analysis
Given the value function of set Si defined in (8) and theutility
function of each SU defined in (9), we formulate theproblem of
multi-channel cooperative spectrum sensing andchannel access as a
coalition formation game with transferableutility (TU) [20] with
the following basic elements:
• Players: The players of the coalition formation game arethe N
SUs (i.e., STj , ∀ j ∈ N ).
• Strategies: The strategy of each SU is the licensed chan-nel
it chooses to sense and access (i.e., STj chooses alicensed channel
i ∈M).
• Utilities: The utility of each SU depends on whichcoalition it
belongs to, and it is defined in (9) (i.e., theutility of STj in
coalition Si is xSij ).
Using the terminology of coalitional game theory, we referto set
Si as coalition i. Since there are M channels in theCRN, there are
M coalitions in the system, where each SUjoins one of the M
coalitions. Since we consider that therecan only be one coalition
in each channel, the coalitions arein fact operating in different
orthogonal channels. Thus, thereis no interference for SUs
belonging to different coalitions.The SUs are allowed to
autonomously form coalitions in theM channels in order to achieve
higher utilities. Moreover, wecan show that this game is a hedonic
coalition formation game[27]. Before presenting its definition, we
first introduce somebasic definitions which are commonly used in
the coalitionformation games.
Definition 1: The set S = {S1, . . . ,SM} is a partition ofN if
Si ∩ Sl = ∅, ∀ i, l ∈M, i 6= l and
⋃i∈M Si = N .
A partition is also referred to as a coalition structure [20].An
example of a partition S is shown in Fig. 1, where N ={1, 2, 3, 4},
S1 = {1, 2}, and S2 = {3, 4}. Therefore, theset S = {{1, 2}, {3,
4}} is a partition of N .
Definition 2: For any player j ∈ N , a preference relation�j is
defined as a complete, reflexive and transitive binaryrelation over
the set of all coalitions that player j can possiblyform [27].
Since the SUs are allowed to autonomously form thecoalitions in
the M channels, the above definition is used tocompare the
preference of player j over different coalitions,where player j is
a member. Consequently, for player j ∈ N ,given two coalitions S1 ⊆
N and S2 ⊆ N , S1 �j S2 indicatesthat player j prefers to be a
member of coalition S1 over tobe a member of coalition S2, or at
least, player j prefers bothcoalitions equally. Furthermore, S1 �j
S2 indicates that playerj strictly prefers being a member of
coalition S1 over beinga member of coalition S2. For evaluating the
preferences ofSTj , ∀ j ∈ N , we define the following operation
S1 �j S2 ⇔ Uj(S1) > Uj(S2), (10)where S1 ⊆ N and S2 ⊆ N are
any two coalitions thatcontains STj . The preference function
Uj(Si), j ∈ Si isdefined as
Uj(Si) ={xSij , Si /∈ h(j),−∞, otherwise, (11)
where xSij is defined in (9). h(j) is the history set of STj
,which will be defined in Definition 5. According to the
pref-erence function defined in (11), the preference over
differentcoalitions for STj , ∀ j ∈ N is related to its utility
functiondefined in (9).
Given the set of players N and a preference relation �j forevery
player j ∈ N , a hedonic coalition formation game isdefined as
follows:
-
Definition 3: A hedonic coalition formation game is acoalitional
game that satisfies the following two conditions: 1)The utility of
any player depends solely on the members of thecoalition to which
the player belongs; 2) The coalitions formas a result of the
preferences of the players over their possiblecoalition set.
Therefore, a hedonic coalition formation gameis defined by the pair
(N ,�) where N is the set of playersand � is a profile of
preferences defined for every player inN .
The formulated game is a hedonic coalition formation gameas it
satisfies the above conditions. First, from (9), the
utilityfunction of STj , ∀ j ∈ Si depends only on the SUs in
coalitionSi, i ∈ M. Second, the preference function of each SU
isdefined in (11).
From the definitions of the preference relations of the SUsin
(10) and the preference function in (11), it is clear thatSTj , ∀ j
∈ N would like to join a new coalition, which STjhas never been a
member of, if and only if STj can obtain ahigher utility in this
new coalition than ever before. Therefore,we present the switch
rule for coalition formation.
Definition 4: (Switch Rule) Given a partition S ={S1, . . .
,SM}, STj , j ∈ Si decides to leave its currentcoalition Si and
join another coalition Sl where i 6= l, if andonly if Sl
⋃ {j} �j Si.The switch rule provides a mechanism through which a
SU
can leave its current coalition and join another coalition,
giventhat the new coalition is strictly preferred over the
currentcoalition. The switch rule can be viewed as a selfish
decisionmade by a player to move from its current coalition to anew
coalition, regardless of the effect of its move on theother
players. According to the switch rule, all the N SUscan make
decisions to automatically form coalitions in thesystem. Thus, the
partition of the (N ,�) hedonic coalitionformation game may change
in each time frame. We definethe initial partition of the hedonic
coalition formation gameas S(0) = {S(0)1 , . . . ,S
(0)M }, and the partition at the r-th time
frame as S(r) = {S(r)1 , . . . ,S(r)M }. After each time
frame
of duration T , the partition may change according to
ourproposed switch rule. If S(r) = S(r−1), then there is noswitch
operation during the r-th time frame. Otherwise, one SUshould move
from its current coalition to another coalition inthe r-th time
frame. Now, we present the definition of historyset h(j) of STj ,
which appeared in (11).
Definition 5: At the r-th time frame, the history set forSTj , j
∈ N is h(j) = {S(0)i0 , . . . ,S
(r−1)ir−1
}, where we have iz ∈M and j ∈ Siz at any time frame index z ∈
{0, 1, . . . , r−1}.At the end of the r-th time frame, STj will
update its historyset h(j) by including a new element S(r)ir ,
where ir ∈M andj ∈ Sir .
Proposition 1: If STj performs the switch rule in the r-thtime
frame, which it leaves its previous coalition Si (denotedas
S(r−1)ir−1 ) and joins another coalition Sl with i 6= l, the
newlyformed coalition Sl
⋃ {j} (denoted as S(r)ir ) cannot be thesame with the previous
coalition members in the history seth(j). That is, we have Sl
⋃ {j} /∈ h(j) before the update ofh(j) at the end of the r-th
time frame.
Proof: Suppose that we can find S(r)ir = S(z)iz
, wherez ∈ {0, 1, . . . , r − 1} and S(z)iz ∈ h(j). Then, we
havexS(r)irj = x
S(z)izj according to (9). However, according to the
definition of the switch rule, STj will perform the
switchoperation if and only if the new coalition is strictly
preferredby STj over the previous coalition. Therefore, we have
xS(r)irj > x
S(z)izj , which contradicts with our assumption. Thus,
the newly formed coalition S(r)ir cannot be the same with anyof
the previous coalitions S(z)iz in the history set h(j).
Next, we will prove that there exists a stable partition inour
hedonic coalition formation game. Before presenting theproof, we
first define two types of stable partitions [19].
Definition 6: A partition S = {S1, . . . ,SM} is Nash-stableif ∀
j ∈ Si with ∀ i ∈M, Si �j Sl
⋃ {j}, ∀ l ∈M.In other words, a coalition partition S is
Nash-stable if no
player has an incentive to move from its current coalition
toanother coalition. Therefore, no player can obtain a
higherutility by performing the switch rule when the current
partitionis Nash-stable. When a partition is Nash-stable, it
implies thatit is individually stable [19] that there does not
exist anycoalition, where a player strictly prefers to join, while
theother players in that coalition do not get hurt by the
formationof this new coalition.
Definition 7: A partition S = {S1, . . . ,SM} is
individuallystable if there does not exist j ∈ Si with i ∈ M, anda
coalition Sl (l 6= i) such that Sl
⋃ {j} �j Si, andSl⋃ {j} �k Sl for all k ∈ Sl.Theorem 1: Starting
from any initial partition S(0), all
the SUs will always converge to a final partition S∗ ={S∗1 , . .
. ,S∗M}, which is both Nash-stable and individuallystable.
Proof: Given any initial partition S(0), the hedoniccoalition
formation consists of a sequence of switch oper-ations. Therefore,
there is a sequence of network partitions{S(0),S(1),S(2), . . .
,S(r)} after r iterations. According toDefinition 4, a SU will
achieve a higher utility in its newcoalition after each switch
operation. From Proposition 1, weknow that each switch operation
leads to a new partition whichhas not been visited before. Given
the number of channels Mand the number of SUs N in the CRN, the
total number ofdifferent partitions is MN , which is a finite
number. Thus,from any S(0), the switch operations will always
terminate ata point after a finite number of iterations, where the
coalitionstructure converges to the final partition S∗.
Suppose S∗ is not Nash-stable. According to Definition 6,there
exist some switch operations which can increase theutility of one
SU by moving this SU from its current coalitionto another
coalition. The partition will be updated that S∗ isnot the final
partition, which contradicts with our assumption.Thus, the final
partition S∗ must be Nash-stable. Accordingto [19], a Nash-stable
partition is individually stable.
It should be noted that when the history sets are not used,the
partition still converges to stability, but at the expense of
alonger convergence time. In the next section, we will presentthe
coalition formation algorithms.
-
Algorithm 1 Decision node DNi selection algorithm inchannel i
∈M. The algorithm is executed by STj , ∀ j ∈ Si.
1: for iteration r := 1 to MAX do2: STj broadcasts its measured
SNR information γ
(r)i,j and
transmission rate Rj,i to other secondary transmittersSTk, ∀ k ∈
S(r)i \{j}
3: STj receives the measured SNR information γ(r)i,k and
transmission rate Rk,i from other STk, ∀ k ∈ S(r)i \{j}4: q :=
argmax
p∈S(r)iγ(r)i,p
5: DN(r)i := STq
6: end for
IV. ALGORITHMS FOR COALITION FORMATION
In this section, we describe how to implement the CSSAscheme and
the hedonic coalition formation game. We proposea DN selection
algorithm, and a coalition formation algorithmbased on the switch
rule.
In order for the N SUs to play the hedonic coalitionformation
game, two stages are involved. In stage one, theAP gathers
information about the number of PUs in the CRN,the operating
frequency, bandwidth Bi of PUi, ∀ i ∈ M,the locations of the PUs,
the transmit power of the PUsσ2s,i, ∀ i ∈ M, and channel models.
Although the AP hassome information about the PUs, we assume that
it does notknow exactly when the PUs will be active. Then, all
theSUs will communicate with the AP in order to obtain
theinformation of the PUs. The AP will set the initial
partitionS(0) and convey this initial partition to all the SUs. The
initialpartition is set as S(0)1 = N and S
(0)l = ∅, ∀ l ∈ M\{1}. In
stage two, all the SUs will perform the switch operations
untilthe CRN converges to a final Nash-stable partition S∗,
whichrequires a total number of MAX iterations. Since the numberof
channels M and the number of SUs N are both finite, ifthe number of
iterations MAX is large enough, the CRN canalways converge to a
final Nash-stable partition S∗ accordingto Theorem 1. At each time
frame, only one SU can leaveits current coalition and move to
another coalition in order toobtain a higher utility. In this
stage, Algorithm 1 is used for theselection of DNi, ∀ i ∈ M, and
Algorithm 2 is used for theswitch operations in coalition
formation. After the coalitionstructure converges to the final
Nash-stable partition S∗, theSUs will stay in their current
coalitions in S∗ to sense andaccess the channels according to our
proposed CSSA scheme.
We first present an algorithm for the DN selection in
eachcoalition in Algorithm 1. We propose to choose the SU withthe
highest detection probability, which is defined in (2), incoalition
Si as DNi. The reason is that the sensing resultscan be corrupted
due to transmission error when they aresent by STj , j ∈ Si to DNi.
If the SU with the highestdetection probability is chosen as the
DN, the most reliablesensing result from that SU is not required to
be sent forreporting, and it can thus be used in the decision
fusion withoutexperiencing any corruption. Since DNi decides the
status ofchannel i, if PUi is active, the primary data transmission
canbe protected by guaranteeing the most reliable sensing
result
Algorithm 2 Coalition formation algorithm based on theswitch
rule. It is executed by STj , ∀ j ∈ N .
1: Initialization: S(0)1 := N ; S(0)l := ∅, ∀ l ∈M\{1}
2: for iteration r := 1 to MAX do3: S(r)i := S
(r−1)i , where i ∈M and j ∈ S
(r)i
4: STj generates θj , which is a Gaussian random variablewith
mean 0 and variance 1
5: STj randomly selects another licensed channel αj suchthat αj
∈M, αj 6= i
6: STj broadcasts the information of θj to otherSTk, ∀ k ∈ N , k
6= j
7: STj receives the information of θk from otherSTk, ∀ k ∈ N , k
6= j
8: m := argmaxw θw, ∀w ∈ N9: if STj = STm then
10: STj computes xS(r)ij := v(S
(r)i )/|S
(r)i |
11: S(r)i := S(r)i \{j}
12: STj requests and obtains the information of S(r)αjfrom DN
(r)αj
13: S(r)αj := S(r)αj⋃{j}
14: if S(r)αj ∈ h(j) then15: S(r)αj := S(r)αj \{j}16: S(r)i :=
S
(r)i
⋃{j}17: else18: STj computes x
S(r)αjj := v(S
(r)αj )/|S(r)αj |
19: if xS(r)αjj ≤ x
S(r)ij then
20: S(r)αj := S(r)αj \{j}21: S(r)i := S
(r)i
⋃{j}22: end if23: end if24: end if25: STj updates h(j) by adding
its current coalition at the
end of h(j)26: end for
is not corrupted, especially if the OR rule is used.In the r-th
iteration, Algorithm 1 is executed by STj , ∀ j ∈
Si in order to select DN (r)i for channel i ∈ M. Since
STjdetermines which channel it should sense and access in
eachframe, STj knows the value of i ∈ M. In the r-th iteration,all
the SUs in coalition S(r)i have to exchange their measuredSNR
information in a dedicated error-free control channel[28] (lines
2-3). Besides, the information of transmission rateRj,i is also
exchanged in order to compute the utilities inAlgorithm 2. The SU
with the highest measured SNR ischosen as DN (r)i (lines 4-5).
Since Pd,i,j(ε, δ, σ
2n,i, γi,j) is an
increasing function of γi,j , we have the following
proposition.Proposition 2: The DNi selected by Algorithm 1 has
the
highest detection probability in Si.Next, we discuss the
coalition formation based on the switch
rule in Algorithm 2, which is executed by STj , ∀ j ∈ N inthe
r-th iteration. In each iteration, Algorithm 2 consists oftwo
phases: phase one (lines 3-8) and phase two (lines 9-25).
-
In phase one, one SU has to be selected, which is carried outas
follows. A random number is first generated by each SU(line 4) and
is broadcast in the dedicated control channel [28](lines 6-7). The
SU with the largest random number is selected(line 8) to perform
the switch operation in phase two. At thebeginning of phase two, we
assume that user STj ∈ S(r)iand channel αj ∈ M, where αj 6= i (line
5), are selected.STj will be temporarily switched from its current
coalitionS(r)i to another coalition S
(r)αj (lines 11-13). In line 12, STj
obtains information of S(r)αj from DN (r)αj , which include
datarates Rk,αj (∀ k ∈ S(r)αj ), coalition size |S(r)αj |, and
statisticsPd,αj , Pf,αj , and PH0,αj . If STj has already been to
S
(r)αj
before (lines 14-17) or its achieved utility is reduced that
xS(r)αjj ≤ x
S(r)ij (lines 19-22), then STj will be switched back
to its original coalition S(r)i (i.e., there is no net effect in
thepartition in the r-th iteration). Otherwise, STj will remain
incoalition S(r)αj . After that, STj will update its history set
h(j)(line 25).
Our proposed algorithms are adaptive to changes in
networksettings. When new PUs and SUs are deployed, existing PUsand
SUs are removed, or the wireless channel conditions arechanged,
both stages one and two will be performed again inorder to find the
new Nash-stable partition. In practice, thesetwo stages will be
performed periodically for the CRN, wherechanges in network
settings may occur occasionally.
V. MODEL EXTENSION: HEDONIC COALITIONFORMATION GAME WITH
NONTRANSFERABLE UTILITYIn this section, we extend the model
considered in the
previous sections and consider the coalition formation gameunder
the nontransferable utility (NTU) framework. In SectionIII, we
present the cooperative setting, where a SU considersthe average
data rate, penalty, and energy consumption ofthe whole coalition in
its utility function in (9). Thus, all theusers belonging to the
same coalition receive the same utility,and we can apply the
coalition formation algorithm for TUgames. Alternatively, we
consider the non-cooperative setting[20] in this section, where a
SU considers its individual datarate, penalty, and energy
consumption in its utility function.The coalition formation problem
is formulated under theNTU framework. Specifically, in a NTU game,
the valuev(Si) of coalition Si is a |Si|-dimensional real vector
thatcontains the utilities of all the players in the coalition.
Thatis, v(Si) = (xSij , ∀ j ∈ Si).
A. Utility Function
The payoff of player STj in Si is defined as the reward(i.e.,
the amount of data transmitted by STj in Si) minus thepenalty
(i.e., the payment required by STj in Si for interferingwith PUi’s
transmission) in the data transmission subframe.Similar to the
analysis in Section III-A, we have four differentscenarios related
to the activity of the PUi and the decisionof DNi in channel i
∈M.
Scenario 1: PUi is silent and the decision made by DNiis not a
false alarm. In this scenario, STj , ∀ j ∈ Si transmitsdata during
the data transmission subframe successfully. The
payoff of STj is given by xSi0|0,D,j = Rj,i(T − δ)/|Si|.
Theenergy consumption of STj is given by xSi0|0,E,j = Psδ +Pt(T −
δ)/|Si|.
Scenario 2: PUi is silent and the decision made by DNi isa false
alarm. In this scenario, since STj , ∀ j ∈ Si does nottransmit
during the idle data transmission subframe, and thereis no
interference with the PU. The payoff of STj is xSi1|0,D,j =0, and
the energy consumption of STj is xSi1|0,E,j = Psδ.
Scenario 3: PUi is active and DNi fails to detect thepresence of
the primary signal. In this scenario, STj interfereswith PUi’s
transmission. The payoff of STj is xSi0|1,D,j =−D0(T − δ)/|Si|, and
the energy consumption of STj isxSi0|1,E,j = Psδ + Pt(T −
δ)/|Si|.
Scenario 4: PUi is active and DNi detects the presenceof the
primary signal. In this scenario, STj does not transmitduring the
data transmission subframe. The payoff of STj isxSi0|1,D,j = 0, and
the energy consumption of STj is x
Si0|1,E,j =
Psδ.Combining the analysis of the above four scenarios, the
expected payoff of STj is given by
xSiD,j =1∑a=0
1∑b=0
Pa|b,ixSia|b,D,j . (12)
The expected energy consumption of STj is given by
xSiE,j =1∑a=0
1∑b=0
Pa|b,ixSia|b,E,j . (13)
The utility function of STj , ∀ j ∈ Si is thus given by
xSij =xSiD,jxSiE,j
=P0|0,iRj,i(T − δ)− P0|1,iD0(T − δ)Ps|Si|δ + (P0|0,i +
P0|1,i)Pt(T − δ)
. (14)
From (14), the utility function of STj , ∀ j ∈ Si dependsonly on
the SUs in coalition Si, i ∈ M. By applying thesame preference
function in (11), the NTU game described inthis section is still a
hedonic coalition formation game fromDefinition 3.
B. Coalition Formation Algorithm
Our proposed algorithms can be applied to the NTU settingwith
minor modifications. Notice that the main differencebetween the TU
and NTU approaches is the definitions ofthe utility functions for
each SU as given by (9) and (14),respectively. Therefore, we can
still apply the switch rule toupdate the network partition, and all
the SUs will still convergeto the final partition S∗ = {S∗1 , . . .
,S∗M}, which is both Nash-stable and individually stable [29].
Furthermore, we only needto make minor changes to the proposed
Algorithms 1 and 2for decision node selection and coalition
formation in the NTUsetting. Specifically, since we define the
utility function of eachSU in a different way in our NTU approach,
the informationof the transmission rate do not need to be exchanged
in lines 2and 3 of Algorithm 1. Also, in lines 10 and 18 of
Algorithm 2,the utility xSij should be computed as in (14). With
thesemodifications, our proposed hedonic coalition formation
gameframework is applicable in the NTU setting.
-
0 20 40 60 80 1000
10
20
30
40
50
60
70
80
90
100
P U1
P U2
AP
ST1
SR1
x
y
ST2
SR2
ST3
SR3
ST4
SR4S1
S2
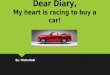
Fig. 2. An example of the Nash-stable partition (M = 2, N = 4).
In thisexample, ST1 and ST2 belong to coalition S1, while ST3 and
ST4 belongto coalition S2.
VI. PERFORMANCE EVALUATION
In this section, we first present the results for the
conver-gence of our algorithms. We then evaluate the
performancegain of our CSSA scheme over the closest PU (CPU)
scheme,where each SU chooses to sense the closest PU and joins
thatcoalition to perform cooperative sensing. We also compare
theCSSA scheme with the noncooperative spectrum sensing andaccess
(NSSA) scheme, where the SUs perform local spectrumsensing only and
do not combine their sensing results. Unlessspecified otherwise, we
consider that there are one AP, fivePUs (i.e., M = 5) and ten ST-SR
pairs (i.e, N = 10). Thepositions of each node are randomly placed
in a 100 m ×100 m square region. Notice that when M (or N )
increases,the computational complexity of our algorithms is
increased.However, a promising feature of our algorithms is that
theaverage utility of the SUs improves in every iteration if
thenetwork condition is fixed. The bandwidth of the primarychannel
Bi is 10 MHz, ∀ i ∈ M. For all i ∈ M and j ∈ N ,we model the
average channel gain of the link between PUiand STj as |gi,j |2 =
1/dγi,j , where di,j is the distance betweenPUi and STj , and γ is
the path loss exponent. Also, we modelthe average channel gain of
the link between STj and SRj as|hj,i|2 = 1/dγj,i, where dj,i is the
distance between STj andSRj . We choose γ to be equal to 2. Other
parameters used inour simulations are as follows: the length of
each time frameT is 100 ms; the sampling frequency fs is 1 kHz; the
transmitpower of each ST Pt is 10 mW; the sensing power of eachST
Ps is 10 mW; the detection threshold ε is 0.2 mW; thenoise power
σ2n,i is 0.1 mW for all i ∈ M. The probabilitythat PUi, i ∈ M is
active is PH1,i = PH1 = 0.8, ∀ i ∈ M.We choose the sensing duration
δ to be 5 ms and the unitpenalty per second D0 to be 100. We assume
that the OR ruleis used for the data fusion. Each point is averaged
over 100independent simulation runs.
Fig. 2 shows an example of the Nash-stable partition. TheAP is
deployed at the centre of the square region with two PUsand four
ST-SR pairs randomly placed. The nodes in the samerectangle
represent the SUs belonging to the same coalition.
1000 2000 3000 4000 5000 60000
1
2
3
4
5
6
7
8
r
Aver
age
uti
lity
of
SU
s
CSSA
NSSA
Fig. 3. The average utility of the SUs versus iteration index r
(M = 5,N = 10). We can see that Algorithm 2 converges quickly to a
stable partitionagain for both the CSSA and the NSSA schemes after
the change in networktopology. The change in network topology at r
= 2000 and r = 4000 aredue to the deployment of new PU and SUs,
respectively.
From Fig. 2, we can see that ST1 and ST2 form a coalitionin the
channel of PU1, while ST3 and ST4 form anothercoalition in the
channel of PU2. Therefore, the Nash-stablepartition is {{1, 2}, {3,
4}}. In this Nash-stable partition, sinceST1 and ST2 is closer to
PU1 than to PU2, their probabilitiesof detecting the activity of
PU1 is higher than that of PU2.Thus, they choose to sense and
access the channel of PU1 inthe Nash-stable partition.
Fig. 3 shows the average utility of the SUs in each
iterationusing our proposed algorithms for the CRN. We assume
thatthere is a new PU deployed in the CRN at r = 2000, andthere are
four SUs deployed at r = 4000. After each of thesechanges in the
network topology, Algorithm 2 results in theorganization of the SUs
that eventually converges to a newNash-stable partition. We can see
that the average utility ofthe SUs at the Nash-stable partition is
increased when a newPU joins the CRN, and decreased when four SUs
join theCRN. Moreover, we can see that the average utility of the
SUsachieved under the CSSA scheme is higher than that under theNSSA
scheme.
In Fig. 4, we show the average utility of the SUs obtainedby our
algorithms versus the number of PUs M in the CRNwhen N is equal to
10. Our results show that the performanceof CSSA is better than
those of CPU and NSSA. For allschemes, the average utility of the
SUs first increases withM , because the SUs can achieve higher
utilities by utilizingthe spectrum when the spectrum resources are
increased. Asfor the CPU scheme, the SUs choose to sense the
closest PUand that corresponding coalition can be too crowded.
Thus,the performance of CPU is worse than CSSA. When M < 10and N
> M , the performance of CSSA is better than that ofNSSA due to
the cooperative gain [6] of cooperative spectrumsensing. When M ≥
10, each SU will choose to sense andaccess a different channel
under CSSA and NSSA. Since thereis only one SU in one channel, the
average utilities of the SUsfor both the CSSA scheme and the NSSA
scheme are the same.Beside, when M ≥ 10, the average utility of the
SUs still
-
2 4 6 8 10 12 14 16 18 200
2
4
6
8
10
12
M
Aver
age
uti
lity
of
SU
sCSSA
CPU
NSSA
Fig. 4. The average utility of the SUs versus the number of PUs
M (N =10).
0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.91
2
3
4
5
6
7
8
9
10
PH1
Aver
age
uti
lity
of
SU
s
CSSA
CPU
NSSA
Fig. 5. The average utility of the SUs versus the probability
for PUs beingactive PH1 (M = 5, N = 10).
increases with M . It is because each SU may have a betterchoice
of channels when there are more available channelsin the CRN. When
M is large, increasing M further willnot improve the spectrum
utilization too much, because thenumber of SUs is limited and the
additional spectrum cannotbe utilized by the SUs.
In Fig. 5, we show the average utility of the SUs versus
theprobability that PUs being active PH1 . Our results show thatthe
performance of CSSA is better than CPU and NSSA. Wecan see the
performance gap between CSSA and CPU does notchange too much with
PH1 , but the performance gap betweenCSSA and NSSA increases with
PH1 . When PH1 is smallsuch that the channels are not often
occupied by the PUs,the improved sensing accuracy due to
cooperative spectrumsensing is not significant as the channels are
vacant for mostof the time. When PH1 increases so that the PUs
occupy thechannels more frequently, the improved sensing accuracy
byapplying cooperative spectrum sensing helps the SUs detectthe
activities of the PUs correctly. Thus, the SUs pay lesspenalty for
interfering the PUs’ transmission and makes aneffective use of the
energy that has been consumed for sensing.
20 50 100 150 200 2502.5
3
3.5
4
4.5
5
5.5
6
6.5
7
D0
Aver
age
uti
lity
of
SU
s
CSSA
CPU
NSSA
Fig. 6. The average utility of the SUs versus the unit penalty
per secondD0 (M = 5, N = 10).
10 20 30 40 50 60 70 80 900
1
2
3
4
5
6
7
δ (ms)
Av
erag
e u
tili
ty o
f S
Us
CSSA
CPU
NSSA
Fig. 7. The average utility of the SUs versus the sensing
duration δ (M = 5,N = 10, T = 100 ms).
In Fig. 6, we show the average utility of the SUs obtainedby the
proposed algorithms versus the unit penalty D0. Ourresults show
that the performance of CSSA is better than CPUand NSSA. When D0 is
increased, the average utility of theSUs is decreased under all
schemes. However, the rate ofreduction of the average utility with
D0 for CSSA is muchsmaller so the performance gap between CSSA and
the othertwo schemes increases with D0. The reason is that when
D0is large, each SU is incurred with a larger penalty if thereis a
missed detection. Since the probability of detection ofthe CSSA is
higher than those of CPU and NSSA, therefore,the average utility of
the SUs for CSSA will not decrease assignificantly as CPU and NSSA
when D0 is increased.
In Fig. 7, we show the average utility of the SUs versus
thesensing duration δ. Our results show that the CSSA
schemeperforms better than the CPU and NSSA schemes. Besides,
forall three schemes, the average utility of the SUs first
increaseswith δ, and then decreases with δ after reaching the
optimumpoint. Therefore, there exists an optimal sensing duration
forour proposed CSSA scheme, which is similar to the result
in[9].
-
VII. CONCLUSIONS
In this paper, we studied cooperative spectrum sensing
andchannel access in a CRN with multiple licensed channels.
Weproposed a CSSA scheme and formulated the multi-channelspectrum
sensing and channel access problem as a hedoniccoalition formation
game. The value function of each coalitionand the utility function
of each SU consider both the sensingaccuracy and energy
consumption. We proposed algorithms tofind a Nash-stable partition,
where no SU has the incentiveto perform the switch operation in
order to achieve a higherutility. Simulation results showed that
the performance of ourCSSA scheme is better than that of the CPU
and NSSAschemes. Besides, the results showed that our algorithms
resultin the organization of the SUs that achieves a higher
averageutility of the SUs after each iteration, and that there is a
Nash-stable partition for our formulated hedonic coalition
formationgame. Furthermore, the algorithms enable the SUs to
adaptto changes in network conditions. For future work, we
willextend our hedonic coalition formation game to a more
generalsetting, where each SU can choose its sensing duration as
partof its strategy.
REFERENCES
[1] X. Hao, M. H. Cheung, V. W. S. Wong, and V. C. M. Leung, “A
coalitionformation game for energy-efficient cooperative spectrum
sensing incognitive radio networks with multiple channels,” in
Proc. of IEEEGlobecom, Houston, TX, Dec. 2011.
[2] “Spectrum policy task force,” Federal Communications
Commission,Tech. Rep., 2002.
[3] J. Mitola III and G. Q. Maguire Jr., “Cognitive radio:
Making softwareradios more personal,” IEEE Personal Communications,
vol. 6, no. 4,pp. 13–18, Aug. 1999.
[4] X. Hao, M. H. Cheung, V. W. S. Wong, and V. C. M. Leung,
“AStackelberg game for cooperative transmission and random access
incognitive radio networks,” in Proc. of IEEE PIMRC, Toronto,
Canada,Sept. 2011.
[5] Y. Yi, J. Zhang, Q. Zhang, T. Jiang, and J. Zhang,
“Cooperativecommunication-aware spectrum leasing in cognitive radio
networks,”in Proc. of IEEE Symposium on New Frontiers in Dynamic
Spectrum(DySPAN), Singapore, April 2010.
[6] I. F. Akyildiz, B. F. Lo, and R. Balakrishnan, “Cooperative
spectrumsensing in cognitive radio networks: A survey,” Elsevier
Physical Com-munication, vol. 4, no. 1, pp. 40–62, March 2011.
[7] M. Gandetto and C. Regazzoni, “Spectrum sensing: A
distributedapproach for cognitive terminals,” IEEE Journal on
Selected Areas inCommunications, vol. 25, no. 3, pp. 546–557, April
2007.
[8] T. C. Aysal, S. Kandeepan, and R. Piesiewicz, “Cooperative
spectrumsensing with noisy hard decision transmissions,” in Proc.
of IEEE ICC,Dresden, Germany, June 2009.
[9] Y.-C. Liang, Y. Zeng, E. C. Peh, and A. T. Hoang,
“Sensing-throughputtradeoff for cognitive radio networks,” IEEE
Trans. on Wireless Com-munications, vol. 7, no. 4, pp. 1326–1337,
April 2008.
[10] W. Saad, Z. Han, T. Basar, M. Debbah, and A. Hjorungnes,
“Coalitionformation games for collaborative spectrum sensing,” IEEE
Trans. onVehicular Technology, vol. 60, no. 1, pp. 276–297, Jan.
2011.
[11] W.-Y. Lee and I. F. Akyildiz, “Optimal spectrum sensing
framework forcognitive radio networks,” IEEE Trans. on Wireless
Communications,vol. 7, no. 10, pp. 3845–3857, Oct. 2008.
[12] W. Wang, B. Kasiri, J. Cai, and A. S. Alfa, “Distributed
cooperativemulti-channel spectrum sensing based on dynamic
coalitional game,” inProc. of IEEE Globecom, Miami, FL, Dec.
2010.
[13] C. Song and Q. Zhang, “Cooperative spectrum sensing with
multi-channel coordination in cognitive radio networks,” in Proc.
of IEEEICC, Cape Town, South Africa, May 2010.
[14] Q. Zhao, S. Geirhofer, L. Tong, and B. M. Sadler,
“Opportunisticspectrum access via periodic channel sensing,” IEEE
Trans. on SignalProcessing, vol. 56, no. 2, pp. 785–796, Feb.
2008.
[15] H. Su and X. Zhang, “Energy-efficient spectrum sensing for
cognitiveradio networks,” in Proc. of IEEE ICC, Cape Town, South
Africa, May2010.
[16] L. Lu, H.-C. Wu, and S. Iyengar, “A novel robust detection
algorithm forspectrum sensing,” IEEE Journal on Selected Areas in
Communications,vol. 29, no. 2, pp. 305–315, Feb. 2011.
[17] J. Meng, W. Yin, H. Li, E. Hossain, and Z. Han,
“Collaborative spectrumsensing from sparse observations in
cognitive radio networks,” IEEEJournal on Selected Areas in
Communications, vol. 29, no. 2, pp. 327–337, Feb. 2011.
[18] K. Koufos, K. Ruttik, and R. Jantti, “Distributed sensing
in multibandcognitive networks,” IEEE Trans. on Wireless
Communications, vol. 10,no. 5, pp. 1667–1677, May 2011.
[19] A. Bogomolnaia and M. O. Jackson, “The stability of hedonic
coalitionstructures,” Games and Economic Behavior, vol. 38, pp.
201–230, Feb.2002.
[20] W. Saad, Z. Han, M. Debbah, A. Hjorungnes, and T. Basar,
“Coalitionalgame theory for communication networks,” IEEE Signal
ProcessingMagazine, vol. 26, no. 5, pp. 77–97, Sept. 2009.
[21] W. Saad, Z. Han, T. Basar, M. Debbah, and A. Hjorungnes,
“Hedo-nic coalition formation for distributed task allocation among
wirelessagents,” IEEE Trans. on Mobile Computing, vol. 10, no. 9,
pp. 1327–1344, Sept. 2011.
[22] IEEE 802.22 working group on wireless regional area
networks.[Online]. Available: http://www.ieee802.org/22/
[23] W. Zhang and K. B. Letaief, “Cooperative spectrum sensing
withtransmit and relay diversity in cognitive radio networks,” IEEE
Trans.on Wireless Communications, vol. 7, no. 12, pp. 4761–4766,
Dec. 2008.
[24] G. Ganesan and Y. Li, “Agility improvement through
cooperativediversity in cognitive radio,” in Proc. of IEEE
Globecom, St. Louis,MO, Dec. 2005.
[25] S. Atapattu, C. Tellambura, and H. Jiang, “Energy detection
basedcooperative spectrum sensing in cognitive radio networks,”
IEEE Trans.on Wireless Communications, vol. 10, no. 4, pp.
1232–1241, April 2011.
[26] O. Simeone, I. Stanojev, S. Savazzi, Y. Bar-Ness, U.
Spagnolini, andR. Pickholtz, “Spectrum leasing to cooperating
secondary ad hoc net-works,” IEEE Journal on Selected Areas in
Communications, vol. 26,no. 1, pp. 203–213, Jan. 2008.
[27] D. Ray, A Game-Theoretic Perspective on Coalition
Formation. OxfordUniversity Press, 2007.
[28] B. F. Lo, I. F. Akyildiz, and A. M. Al-Dhelaan, “Efficient
recoverycontrol channel design in cognitive radio ad hoc networks,”
IEEE Trans.on Vehicular Technology, vol. 59, no. 9, pp. 4513–4526,
Nov. 2010.
[29] W. Saad, Z. Han, T. Basar, A. Hjorungnes, and J. B. Song,
“Hedoniccoalition formation games for secondary base station
cooperation incognitive radio networks,” in Proc. of IEEE WCNC,
Sydney, Australia,Apr. 2010.
Xiaolei Hao (S’11) was born in Lanzhou, Gansu,China, in 1987. He
received the B.Eng. degree inCommunication Engineering from the
Beijing Uni-versity of Posts and Telecommunications (BUPT),Beijing,
China, in 2009, and the M.A.Sc. degreein Electrical and Computer
Engineering from theUniversity of British Columbia (UBC),
Vancouver,BC, Canada, in 2011. He worked as a SoftwareEngineer at
Microsoft, Beijing, China, in 2008, andat Key Laboratory of Optical
Communications inBUPT, Beijing, China, in 2009. Since October
2011,
he has been with the TELUS Mobility, Vancouver, Canada, where he
is nowworking as a Radio Frequency (RF) Engineer. His research
interests includewireless communication, optical communication,
game theory, and protocoldesign.
-
Man Hon Cheung (S’06) received the B.Eng. andM.Phil. degrees in
Information Engineering fromthe Chinese University of Hong Kong
(CUHK) in2005 and 2007, respectively, and the Ph.D. degreein
Electrical and Computer Engineering from theUniversity of British
Columbia (UBC) in 2012. Cur-rently, he is a postdoctoral fellow in
the Departmentof Information Engineering in CUHK. He receivedthe
IEEE Student Travel Grant for attending IEEEICC 2009. He was
awarded the Graduate StudentInternational Research Mobility Award
by UBC, and
the Global Scholarship Programme for Research Excellence by
CUHK. Heserves as a Technical Program Committee member in IEEE ICC
and WCNC.His research interests include the design and analysis of
medium accesscontrol protocols in wireless networks using
optimization theory, game theory,and dynamic programming.
Vincent W.S. Wong (SM’07) received the B.Sc.degree from the
University of Manitoba, Winnipeg,MB, Canada, in 1994, the M.A.Sc.
degree from theUniversity of Waterloo, Waterloo, ON, Canada,
in1996, and the Ph.D. degree from the University ofBritish Columbia
(UBC), Vancouver, BC, Canada,in 2000. From 2000 to 2001, he worked
as asystems engineer at PMC-Sierra Inc. He joined theDepartment of
Electrical and Computer Engineeringat UBC in 2002 and is currently
a Professor. Hisresearch areas include protocol design,
optimization,
and resource management of communication networks, with
applications tothe Internet, wireless networks, smart grid, RFID
systems, and intelligenttransportation systems. Dr. Wong is an
Associate Editor of the IEEE Trans-actions on Communications and
IEEE Transactions on Vehicular Technology,and an Editor of
KICS/IEEE Journal of Communications and Networks. He isthe
Symposium Co-chair of IEEE Globecom’13 − Communication
Software,Services, and Multimedia Application Symposium. Dr. Wong
has also served asthe Symposium Co-chair of IEEE Globecom’11 −
Wireless CommunicationsSymposium.
Victor C. M. Leung (S’75, M’89, SM’97, F’03)received the B.A.Sc.
(Hons.) degree in electricalengineering from the University of
British Columbia(U.B.C.) in 1977, and was awarded the APEBCGold
Medal as the head of the graduating classin the Faculty of Applied
Science. He attendedgraduate school at U.B.C. on a Natural Sciences
andEngineering Research Council Postgraduate Schol-arship and
completed the Ph.D. degree in electricalengineering in 1981.
From 1981 to 1987, Dr. Leung was a SeniorMember of Technical
Staff at MPR Teltech Ltd., specializing in the planning,design and
analysis of satellite communication systems. In 1988, he was
aLecturer in the Department of Electronics at the Chinese
University of HongKong. He returned to U.B.C. as a faculty member
in 1989, where he is cur-rently a Professor and the inaugural
holder of the TELUS Mobility ResearchChair in Advanced
Telecommunications Engineering in the Department ofElectrical and
Computer Engineering. Dr. Leung has co-authored more than600
technical papers in international journals and conference
proceedings,several of which had been selected for best paper
awards. His research interestsare in the broad areas of wireless
networks and mobile systems.
Dr. Leung is a registered professional engineer in the Province
of BritishColumbia, Canada. He is a Fellow of IEEE, the Engineering
Institute ofCanada, and the Canadian Academy of Engineering. He has
served on theeditorial boards of the IEEE Journal on Selected Areas
in Communications -Wireless Communications Series, the IEEE
Transactions on Wireless Com-munications and the IEEE Transactions
on Vehicular Technology, and isserving on the editorial boards of
the IEEE Transactions on Computers,IEEE Wireless Communications
Letters, the Journal of Communications andNetworks, Computer
Communications, as well as several other journals. Hehas
guest-edited many journal special issues, and served on the
technicalprogram committee of numerous international conferences.
He has chaired orco-chaired many conferences and workshops. Dr.
Leung was the recipient ofthe IEEE Vancouver Section Centennial
Award and the 2011 U.B.C. KillamResearch Prize.