Embed Size (px)
Citation preview

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 1
DA
Variational Data Assimilation
Hans Huang
NCAR
Acknowledge: Dale Barker, The WRFDA team, MMM and DATC staff
AFWA, NSF, KMA, CWB, BMB, AirDat

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 2
DA
• Introduction to data assimilation.• Basics of variational data assimilation.• Demonstration with a simple system.• The WRFDA approach.
Outline

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 3
DA
Modern weather forecast (Bjerknes,1904)
• Analysis: using observations and other information, we can specify the atmospheric state at a given initial time: “Today’s Weather”
• Forecast: using the equations, we can calculate how this state will change over time: “Tomorrow’s Weather”
Vilhelm Bjerknes (1862–1951)
• A sufficiently accurate knowledge of the state of the atmosphere at the initial time
• A sufficiently accurate knowledge of the laws according to which one state of the atmosphere develops from another.
(Peter Lynch)

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 4
DA
initial state forecast
Analysis
Model
Model state x, ~107
Observationsyo, ~105-106

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 5
DA

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 6
DA
Assimilation methods
• Empirical methods– Successive Correction Method (SCM)
– Nudging
– Physical Initialisation (PI), Latent Heat Nudging (LHN)
• Statistical methods – Optimal Interpolation (OI)
– 3-Dimensional VARiational data assimilation (3DVAR)
– 4-Dimensional VARiational data assimilation (4DVAR)
• Advanced methods– Extended Kalman Filter (EKF)
– Ensemble Kalman Filter (EnFK)

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 7
DA
• Introduction to data assimilation.• Basics of variational data assimilation.• Demonstration with a simple system.• The WRFDA approach.
Outline

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 8
DA
The analysis problem for a given time
Consider a scalar x.
The background (normally a short-range forecast):
xb=xt+b.
The observation:
xr=xt+r.
The error statistics are assumed to be known: < b > = 0, mean error (unbiased), < r > = 0, mean error (unbiased), <b2> = B, background error variance, <r2> = R, observation error variance, <br> = 0, no correlation between b and r ,
where <⋅> is ensemble average.

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 9
DA
BLUE: the Best Liner Unbiased Estimate
The analysis: xa =xt +a.Search for the best estimate: xa=αxb+βxr
Substitute the definitions, we have: α+β=1. <a>=0The variance: A=<a2>=B−2βB+β2 B+R( )
To determine β: dAdβ
=−2B+2β B+R( )=0
we have β= BB+R
The analysis: xa=xb+B
B+Rxr−xb( )
The analysis error variance: A−1=B−1+R−1

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 10
DA
limB→0
xa =xb
The analysis: xa =xb+B
B+Rxr−xb( )
0 <
BB+R
<1
The analysis error variance: A−1 =B−1 + R−1
limR→0
xa =xr
A < B
A < R
The analysis value should be
between background and
observation.
Statistically, analyses are better than
background.Statistically, analyses are better than
observations!
If B is too small,
observations are less useful.If R can be tuned, analysis
can fit
observations as close as one
wants!

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 11
DA
3D-Var
The analysis is obtained by minimizing the cost function J , defined as :
J=12
x-xb( )
T
B-1 x-xb( )+
12
x-xr( )
T
R-1 x-xr( )
The gradient of J with respect to x:
′J =B-1 x-xb( )+R-1 x-xr
( )
At the minimum, ′J =0, we have:
xa=xb+B
B+Rxr−xb( )
the same as BLUE.

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 12
DA
Sequential data assimilation (I)
True states : ..., xi−1t , xi
t , xi+1t , ...
Observations : ..., xi−1r , xi
r , xi+1r , ...
Forecasts : ..., xi−1f , xi
f , xi+1f , ...
Analyses : ..., xi−1a , xi
a, xi+1a , ...

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 13
DA
Sequential data assimilation (II)
Forecast model:
xi+1t =M xi
t( )+qi
Where qi is the model error.
As qi is unknown and xia is the best estimate of xi
t the forecast
model usually takes the form:
xi+1f =M xi
a( )
OI (and 3DVAR): xb=xif
xia=xi
f +B
B+Rxi
r−xif⎛
⎝⎜⎞⎠⎟

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 14
DA
Sequential data assimilation (III)
4DVAR analysis is obtained by minimizing the cost function J , defined as:
J xi( )=12
xi−xif⎛
⎝⎜⎞⎠⎟
T
B−1 xi−xif⎛
⎝⎜⎞⎠⎟
+12
Mk−1 xi( )−xi+kr⎡
⎣⎢⎤⎦⎥T
R−1 Mk−1 xi( )−xi+kr⎡
⎣⎢⎤⎦⎥
k=0
K∑
where, K is the assimilation window and
M−1 xi( ) = xi
M0 xi( ) = M xi( )
Mk−1 xi( ) = M (M (...M
k
1 24 34 (xi )...))

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 15
DA
Sequential data assimilation (IV)
4DVAR (continue)
The gradient of J with respect to x:
′J =B−1 xi−xif⎛
⎝⎜⎞⎠⎟ + M i+ j
T R−1 Mk−1 xi( )−xi+kr⎡
⎣⎢⎤⎦⎥
j=0
k−1∏
k=0
K∑
where, M i+ jT is the adjoint model of M at time step i+ j .

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 16
DA
Scalar to Vector
From scalar to vector:
Number of grid points ≈ 107 :
x→ x xb → xb
Dimension of B, P ≈ 107x 107Number of observations, 106 :
xr → yo
x−xr → H(x) −yo
Dimension of R ≈ 106x 106
Observation operator H

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 17
DA
H - Observation operatorH maps variables from “model space” to “observation space” x y
– Interpolations from model grids to observation locations
– Extrapolations using PBL schemes
– Time integration using full NWP models (4D-Var in generalized form)
– Transformations of model variables (u, v, T, q, ps, etc.) to “indirect” observations (e.g.
satellite radiance, radar radial winds, etc.)• Simple relations like PW, radial wind, refractivity, …
• Radar reflectivity
• Radiative transfer models
• Precipitation using simple or complex models
• …
!!! Need H, H and HT, not H-1 !!!
Z =Z(T, IWC,LWC,RWC,SWC)
0
( )( ) ( , ( ))
dTRL B T z dz
dz
νν ν∞ ⎡ ⎤≈ ⎢ ⎥⎣ ⎦∫

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 18
DA
Level of preprocessing and the observation operator
Phase and amplitude
Ionosphere correctedobservables
Refractivity profiles
Bending angle profiles
Temperature profiles
Raw data:
Frequency relations
Geometry
Abel trasformor ray tracing
Hydrostatic equlibriumand equation of state
H =I
H =H
N
H =H
RH
N
H =H
GH
RH
N
H =H
FH
GH
RH
N

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 19
DA
Sequential data assimilation
Model: xi+1
f = M x ia( )
OI: xia=xi
f +BHT HBHT + R( )-1
yo - H xi
f( )⎡⎣
⎤⎦
4D-Var: J xi( )=1
2xi -xi
f( )
T
B-1 xi -xif
( )
+1
2H Mk-1 xi( )( )-yi+k
o⎡⎣
⎤⎦
TR -1 H Mk-1 xi( )( )-yi+k
o⎡⎣
⎤⎦
k=0
k∑
′J =B-1 xi -xif
( ) + M i+ jT HTR−1 H Mk−1 xi( )[ ]−yi+k
o⎡⎣
⎤⎦
j=0
k−1∏
k=0
K∑

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 20
DA
Issues on variational data assimilation
• Observations yo
• Observation operator H
• Observation errors R
• Backgound xb
• Size of B: statistical model and tuning
• Minimization algorithm Quasi−Newton; Conjugate Gradient; …( )
• M and MT : development and validity

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 21
DA
• Introduction to data assimilation.• Basics of variational data assimilation.• Demonstration with a simple system.
• The WRFDA approach.
Outline

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 22
DA
Nonlinear equation (NL):
xi+1= axi−xi2=M xi( )
Depending on a,three types of solution are found; steady state; limited cycle; chaotic.
Tangent Linear equations (TL):
xi+1tl = a−2xi
bs( )xitl=Μixi
tl
(linearized around basic state xibs)
Adjoint equation (AD):
xiad= a−2xi
bs( )xi+1ad =Μi
T xi+1ad
Note here for this simple case we have
Μi= ΜiT = a−2xi
bs( )
The Lorenz 1964 equation

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 23
DA
Issues on data assimilation
for the system based on the Lorenz 64 equation
• Observation operator H =Η =ΗT =1
• Estimate of the true states - generated (with model error!)
• Observation errors xo−xt=σoG
• Size of Β is 1, but B=σb2 still needs attention
• Μ and ΜT : no eort in development but their validity is still a major problem
(model, assimilation window length, ...)

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 24
DA
Too simple?
Try: Lorenz63 modelTry: 1-D advection equationTry: 2-D shallow water equation…Try: ARW!!!

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 25
DA
• Introduction to data assimilation.• Basics of variational data assimilation.• Demonstration with a simple system.• The WRFDA approach.
WRFDA is a Data Assimilation system built within
the WRF software framework, used for application in both research and operational environments….
Outline

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 26
DA
WRF-Var (WRFDA) Data Assimilation Overview
• Goal: Community WRF DA system for • regional/global, • research/operations, and • deterministic/probabilistic applications.
• Techniques: • 3D-Var• 4D-Var (regional)• Ensemble DA, • Hybrid Variational/Ensemble DA.
• Model: WRF (ARW, NMM, Global)• Support: WRFDA team
• NCAR/ESSL/MMM/DAG• NCAR/RAL/JNT/DATC
• Observations: Conv.+Sat.+Radar

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 27
DA
WRFDA Observations In-Situ:
- Surface (SYNOP, METAR, SHIP, BUOY).- Upper air (TEMP, PIBAL, AIREP, ACARS,
TAMDAR). Remotely sensed retrievals:
- Atmospheric Motion Vectors (geo/polar).- Ground-based GPS Total Precipitable Water.- SSM/I oceanic surface wind speed and TPW.- Scatterometer oceanic surface winds.- Wind Profiler.- Radar radial velocities and reflectivities.- Satellite temperature/humidities.- GPS refractivity (e.g. COSMIC).
Radiative Transfer:- RTTOVS (EUMETSAT).- CRTM (JCSDA).
2004082600 ~ 2004092812
Threshold = 5.0mm
TIME
3 6 9 12 15 18 21 240.0
0.2
0.4
0.6
0.8
1.0
0.00
0.25
0.50
0.75
1.00
1.25
1.50
1.75
2.00
Th
reat
Sco
re
Bias
KMA Pre-operational Verification:
(with/without radar)

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 28
DA
Assume background error covariance estimated by model perturbations x’ :
Two ways of defining x’:
The NMC-method (Parrish and Derber 1992):
where e.g. t2=24hr, t1=12hr forecasts…
…or ensemble perturbations (Fisher 2003):
Tuning via innovation vector statistics and/or variational methods.
Model-Based Estimation of Climatological Background Errors
€
€
B0 = (xb − x t)(xb − x t)T ≈ x' x'T
€
B0 = x'x'T ≈ A(x t 2 − x t1)(x t 2 − x t1)T
€
B0 = x'x'T ≈ C(x k − x )(x k − x )T

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 29
DA
Single observation experiment- one way to view the structure of B
The solution of 3D-Var should be
€
xa = xb + BHT HBHT + R[ ]−1
y − Hxb[ ]
Single observation
€
xa − xb = Bi σ b2 + σ o
2[ ]
−1yi − x i[ ]

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 30
DA
Pressure,Temperature
Wind Speed,Vector,
v-wind component.
Example of B 3D-Var response to a single ps observation

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 31
DA
-20 -15 -10 -5 0 5 10 15 20
X GRID
5
10
15
20
25
-1-0.9-0.8-0.7-0.6-0.5-0.4-0.3-0.2-0.100.10.20.30.40.50.60.70.80.91
-20 -15 -10 -5 0 5 10 15 20
X GRID
5
10
15
20
25
-1-0.9-0.8-0.7-0.6-0.5-0.4-0.3-0.2-0.100.10.20.30.40.50.60.70.80.91
CV5-ENS
-20 -15 -10 -5 0 5 10 15 20
X GRID
5
10
15
20
25
-1-0.9-0.8-0.7-0.6-0.5-0.4-0.3-0.2-0.100.10.20.30.40.50.60.70.80.91
CV5-NMC
-20 -15 -10 -5 0 5 10 15 20
X GRID
5
10
15
20
25
-1-0.9-0.8-0.7-0.6-0.5-0.4-0.3-0.2-0.100.10.20.30.40.50.60.70.80.91
B from ensemble methodB from NMC method
Examples of BT increments : T Observation (1 Deg , 0.001 error around 850 hPa)

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 32
DA
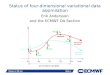
Sensitivity to Forecast Error Covariances in Antarctica(Rizvi et al 2006)
-1
-0.5
0
0.5
1
1.5
2
2.5
3
3.5
4
May 2004
bias/RMSE (K)
60km Verification (vs.
radiosondes)T+24hr Temperature
GFS-based
errors
WRF-based
errors
20km Domain2
60km Domain 1

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 33
DA
Define preconditioned control variable v space transform
where U transform CAREFULLY chosen to satisfy Bo = UUT .
Choose (at least assume) control variable components with uncorrelated errors:
where n~number pieces of independent information.
Incremental WRFDA Jb Preconditioning
€
Jb δx t0( )[ ] =1
2δx t0( ) − xb t0( ) − xg t0( )[ ]{ }
TBo
−1 δx t0( ) − xb t0( ) − xg t0( )[ ]{ }
€
δx t0( ) = Uv
€
Jb δx t0( )[ ] =1
2vn
2
n∑

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 34
DA
WRFDA Background Error Modeling
€
δx t0( ) = Uv = UpUvUhv
Uh: RF = Recursive Filter,
e.g. Purser et al 2003
Uv: Vertical correlations
EOF Decomposition
Up: Change of variable,
impose balance.

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 35
DA
WRFDA Background Error Modeling
100
200
300
400
500
600
700
800
900
1000
0 100 200 300 400 500
Error correlation lengthscale (km)
Pressure (hPa)
u
v
T
p
q
€
δx t0( ) = Uv = UpUvUhv
Uh: RF = Recursive Filter,
e.g. Purser et al 2003
Uv: Vertical correlations
EOF Decomposition
Up: Change of variable,
impose balance.

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 36
DA
WRFDA Background Error Modeling
100
200
300
400
500
600
700
800
900
1000-0.5 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5
Eigenvector Amplitude
Pressure (hPa)Mode 1Mode 2Mode 3Mode 4Mode 5
€
δx t0( ) = Uv = UpUvUhv
Uh: RF = Recursive Filter,
e.g. Purser et al 2003
Uv: Vertical correlations
EOF Decomposition
Up: Change of variable,
impose balance.

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 37
DA
WRFDA Background Error Modeling
Define control variables:
€
ψ '
€
r' = q'/ qs Tb,qb, pb( )
χu ' = χ '− χ b ' ψ '( )
Tu ' =T '−Tb ' ψ '( )
psu ' =ps '−psb ' ψ '( )
€
δx t0( ) = Uv = UpUvUhv
Uh: RF = Recursive Filter,
e.g. Purser et al 2003
Uv: Vertical correlations
EOF Decomposition
Up: Change of variable,
impose balance.

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 38
DA
WRFDA Statistical Balance Constraints
• Define statistical balance after Wu et al (2002):
• How good are these balance constraints? Test on KMA global model data. Plot correlation between “Full” and balanced components of field:
€
€
χb • χ / χ • χ
€
Tb • T / T • T
€
psb • ps / ps • ps
€
χb' = cψ '
€
Tb' (k) = G(k,k1)ψ ' (k1)
k1∑
€
psb' = W (k)ψ ' (k)
k∑

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 39
DA
WRF 4D-Var milestones
2003: WRF 4D-Var project.
2004: WRF SN (simplified nonlinear model).
Modifications to WRF 3D-Var.
2005: TL and AD of WRF dynamics.
WRF TL and AD framework.
WRF 4D-Var framework.
2006: The WRF 4D-Var prototype.
Single ob and real data experiments.
Parallelization of WRF TL and AD.
Simple physics TL and AD.
JcDF
2007: The WRF 4D-Var basic system.
2008: Further optimization and testing

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 40
DA
Basic system: 3 exes, disk I/O, parallel, full dyn, simple phys, JcDF
NL(1),…,NL(K)
TL(1),…,TL(K)
AF(K),…,AF(1)
AD00
WRF
WRF_NL
WRF_TL
WRF_AD
VAR
Outerloop
Mk
dk
Innerloop
U
UT
call
call
call
TL00
Ry1
…
yK
xb
I/O
WRFBDY B
WRF+ BS(0),…,BS(N)
MkT
HkT
Mk
Hk
xn
TLDF
WRFINPUT

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 41
DA
Why 4D-Var?• Use observations over a time interval,
which suits most asynoptic data and use tendency information from observations.
• Use a forecast model as a constraint, which enhances the dynamic balance of the analysis.
• Implicitly use flow-dependent background errors, which ensures the analysis quality for fast developing weather systems.
• NOT easy to build and maintain!

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 42
DA
QuickTime™ and aTIFF (Uncompressed) decompressor
are needed to see this picture.
QuickTime™ and aTIFF (Uncompressed) decompressor
are needed to see this picture.
QuickTime™ and aTIFF (Uncompressed) decompressor
are needed to see this picture.
QuickTime™ and aTIFF (Uncompressed) decompressor
are needed to see this picture.
QuickTime™ and aTIFF (Uncompressed) decompressor
are needed to see this picture.QuickTime™ and a
TIFF (Uncompressed) decompressorare needed to see this picture.
QuickTime™ and aTIFF (Uncompressed) decompressor
are needed to see this picture.
Radiance Observation Forcing at 7 data slots
€
H iTRi
−1(HiM iδx0 − di)

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 43
DA
Single observation experimentThe idea behind single ob tests:
The solution of 3D-Var should be
€
xa = xb + BHT HBHT + R[ ]−1
y − Hxb[ ]
Single observation
€
xa − xb = Bi σ b2 + σ o
2[ ]
−1yi − x i[ ]
3D-Var 4D-Var: H HM; H HM; HT MTHT
The solution of 4D-Var should be
€
xa = xb + BMTHT H MBMT( )HT + R[ ]−1
y − HMxb[ ]
Single observation, solution at observation time
€
M xa − xb( ) = MBMT
( )i
σ b2 + σ o
2[ ]
−1yi − x i[ ]

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 44
DA
Analysis increments of 500mb from 3D-Var at 00h and from 4D-Var at 06h
due to a 500mb T observation at 06h
++
3D-Var 4D-Var

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 45
DA
500mb increments at 00,01,02,03,04,05,06h to a 500mb T ob at 06h
OBS+

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 46
DA
500mb difference at 00,01,02,03,04,05,06h from two nonlinear runs (one from background; one from 4D-Var)
OBS+

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 47
DA
500mb difference at 00,01,02,03,04,05,06h from two nonlinear runs (one from background; one from FGAT)
OBS+

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 48
DA
Real Case: Typhoon HaitangExperimental Design (Cold-Start)
• Domain configuration: 91x73x17, 45km
• Period: 00 UTC 16 July - 00 UTC 18 July, 2005• Observations from Taiwan CWB operational database.• 5 experiments are conducted:
FGS – forecast from the background [The background fields are 6-h WRF forecasts from National Center for Environment Prediction (NCEP) GFS analysis.]
AVN- forecast from the NCEP AVN analysis 3DVAR – forecast from WRF-Var3d using FGS as background FGAT - forecast from WRF-Var3dFGAT using FGS as
background
4DVAR – forecast from WRF-Var4d using FGS as background

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 49
DA
Typhoon Haitang 2005

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 50
DA
A KMA Heavy Rain Case
Period: 12 UTC 4 May - 00 UTC 7 May, 2006
Assimilation window: 6 hours
Cycling (6h forecast
from previous cycle as
background for analysis) All KMA operational data
Grid : 60x54x31
Resolution : 30km
Domain size: the same as the
KMA operational 10km domain.

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 51
DA
Precipitation Verification
0.1 mm Precipitation
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
3 6 9 12 15 18 21 24
FCST Time (hours)
CSI3dvar4dvar
5mm Precipitation
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
3 6 9 12 15 18 21 24
FCST Time (Hours)
CSI3dvar4dvar
15 mm Precipitation
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
3 6 9 12 15 18 21 24
FCST Time (Hours)
CSI3dvar4dvar
25 mm Precipitation
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
3 6 9 12 15 18 21 24
FCST Time (Hours)
CSI3dvar
4dvar

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 52
DA
Test domain: AFWA T8 45-km
Domain configurations:• 2007-08-15-00 to 2007-08-21-00 • Horizontal grid: 123 x 111 @ 45 km grid spacing, 27
vertical levels• 3/6 hours GFS forecast as FG • Every 6 hours
Observations used:sound sonde_sfc
synop geoamv
airep pilot
ships qscat
gpspw gpsref

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 53
DA
00 h 12 h 24 h
RMSE Profiles at Verification Times (U,V)

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 54
DA
00 h 12 h 24 h
RMSE Profiles at Verification Times (T,Q)

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 55
DA
The first radar data assimilation experiment using WRF 4D-Var (OSSE)
TRUTH ----- Initial condition from TRUTH (13-h forecast initialized at 2002061212Z from AWIPS 3-h analysis) run cutted by ndown,
boundary condition from NCEP GFS data. NODA ----- Both initial condition and boundary condition from NCEP
GFS data.3DVAR ----- 3DVAR analysis at 2002061301Z used as the initial
condition, and boundary condition from NCEP GFS. Only Radar radial velocity at 2002061301Z assimilated (total # of data points = 65,195).
4DVAR ----- 4DVAR analysis at 2002061301Z used as initial condition, and boundary condition from NCEP GFS. The radar radial velocity at 4 times: 200206130100, 05, 10, and 15, are assimilated (total # of data points = 262,445).

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 56
DA
TRUTH NODA
4DVAR3DVAR
Hourly precipitation ending at 03-h forecast

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 57
DA
TRUTH NODA
3DVAR 4DVAR
Hourly precipitation ending at 06-h forecast

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 58
DA
Real data experiments
QuickTime™ and a decompressor
are needed to see this picture.

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 59
DA
• Introduction to data assimilation.• Basics of variational data assimilation.• Demonstration with a simple system.• The WRFDA approach:
• y, H, H, HT
• B• M, M, MT
• 4D-Var
Summary

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 60
DA
A short list of
variational data assimilation issues
• yo observations, preprocessing, quality control
• H new observation types, improving operators
• R observational errors, tuning, correlated observational errors
• xb improve models (an important part of DA!!)
• B Statistical models, flow-dependent features
• Minimization algorithm Quasi−Newton; Conjugate Gradient; …( )
• M and MT : development and validity (and ensemble approaches)

Hans Huang: Variational Data Assimilation, SNU lecture. June 9th, 2009 61
DA
www.mmm.ucar.edu/wrf/users/wrfda