Embed Size (px)
Citation preview

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
University Gabriele d’Annunzio Chieti-Pescara - Italy
Handling Uncertainty in Complex Systems
Dr. Serena Doria Department of Engineering and Geology,
University G. d’Annunzio
The aim of the course is to introduce some new results proposed in literature to represent and handling uncertainty in complex systems.

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
Program -Complex systems and complex decisions in the real world. Imprecise probability: a tool to represent partial knowledge.
-Iterated functions systems, attractors, fractal set: mathematical models to represent complex systems.
-A measure of the complexity of a set: the Hausdorff dimension; Hausdorff dimensional outer measures.
- A new model of upper and lower coherent conditional previsions based on Hausdorff outer measures.
- Coherent measures of risk defined by the Choquet integral with respect to Hausdorff outer measures: applications.

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
References 1. Billingsley, P. Probability and measure. Wiley, (1986) 2. Blackwell, D., Dubins L. On existence and non existence of proper, regular, conditional distributions. The annals of Probability, Vol. 3, No 5, 741-752 Wiley, (1975) 3. Choquet, G. Theory of capacities. Ann. Inst. Fourier, 5, 131-295, (1953) 4. de Finetti, B. Probability, Induction and Statistics, Wiley, New York, (1972) 5. de Finetti, B. Theory of Probability, Wiley, London, (1974) 6. Denneberg, D. Non-additive measure and integral. Kluwer Academic Publishers, (1994) 7. Doria, S. Probabilistic independence with respect to upper and lower conditional prob- abilities assigned by Hausdor_ outer and inner measures. International Journal of Ap- proximate Reasoning, 46, 617-635, (2007) 8. Doria, S. Convergences of random variables with respect to coherent upper probabilities de_ned by Hausdor_ outer measures, Advances in Soft Computing, 48, Springer, 281-288 (2008) 9. Doria, S. Coherent upper conditional previsions and their integral representation with respect to Hausdor_ outer measures Combining Soft Computing and Stats Methods, C.Borgelt et al. (Eds.) 209-216, (2010) 10. Doria, S. Coherent Upper and Lower Conditional Previsions De_ned by Hausdor_ Outer and Inner Measures in Modeling, Design, and Simulation Systems with Uncertain- ties, Mathematical Engineering, Springer, Volume 3, 175-195, (2011) 11. Doria, S. Characterization of a coherent upper conditional prevision as the Choquet integral with respect to its associated Hausdor_ outer measure, Annals of Operations Research, 195, 33-48, (2012) 12. Doria, S. Symmetric coherent upper conditional prevision by the Choquet integral with respect to Hausdorff outer measure, Annals of Operations Research, 229, 377-396, (2014) 13. Doria, S. Coherent conditional measures of risk de_ned by the Choquet integral with respect to Hausdorff outer measure and stochastic independence in risk management,

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
International Journal of approximate Reasoning, 65, 1-10, (2015) 14. Doria, S. On the disintegration property of a coherent upper conditional prevision by the Choquet integral with respect to its associated Hausdorff outer measure, Annals of Operations Research,Volume 256, Iussue 2, 253-269, (2017) 15. Di Cencio, A., Doria, S. Probabilistic Analysis of Suture Lines Developed in Am- monites: The Jurassic Examples of Hildocerataceae and Hammatocerataceae, Mathemat- ical Geosciences, Volume 49, Issue 6, 737-750, (2017) 16. Dubins, L.E. Finitely additive conditional probabilities, conglomerability and disinte- grations. The Annals of Probability, Vol. 3, 89-99, (1975) 17. Falconer, K.J. The geometry of fractals sets. Cambridge University Press, (1986) 18. Grabisch, M. Set Functions, Games and Capacities in Decision Making. Springer, (2016) 19. Regazzini, E. Finitely additive conditional probabilities, Rend. Sem. Mat. Fis., Milano, 55,69-89, (1985) 20. Regazzini, E. De Finetti's coherence and statistical inference, The Annals of Statistics, Vol. 15, No. 2, 845-864, (1987) 21. Rogers, C. A. Hausdorff measures. Cambridge University Press, (1970) 22. Srivastava, S. M. A Course on Borel Sets, Spring, (1998) 23. Troffaes M., de Cooman G. Lower Previsions, Wiley, (2014) 24. Walley, P. Coherent lower (and upper) probabilities, Statistics Research Report, Uni- versity of Warwick, (1981) 25. Walley, P. Statistical Reasoning with Imprecise Probabilities. Chapman and Hall, London, (1991)

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
Deterministic phenomena in which, starting from known initial conditions, we can determine the values of the quantities under examination and therefore the outcome of the phenomenon (e.g. a falling object) Random phenomena or well-defined phenomena whose outcome is not known until the phenomenon occurs (e.g. of a coin) Complex phenomena characterized by a non-linear response to perceived stimuli (e.g. sand castle, landslides, earthquakes, floods, chorus)

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
A complex decision is a decision where the best alternative cannot be obtained by a preference ordering represented by a linear functional
A random variable X is a bounded function from Ω to the real numbers ℝ. This function is called gamble in Walley (1991) or random quantity in de Finetti (1972, 1974).

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
A functional " defined on the class L(B) of all random variables defined on a non-empty set B is linear if for every #, % ∈ L(B) and for every ', ( ∈ ℛ
"*'# + (%, = '"*#, + ("*%,

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
A preference ordering on the class L(B) of all random variables defined on B is represented by a linear functional " (e.g. the weighted sum) if and only if
# ≻ % ⇔ "*#, > "*%, and
# ≃ % ⇔ "*#, = "*%, Nevertheless not all preference orderings can be represented by a linear functional

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
Example 1 Let Ω be a non-empty set, B = 234, 345 and let 6 be a probability measure defined on the field generated by B. Let consider the class 7 = 284, 894, 8:5 of bounded B-measurable random variables defined on B by
Random variables
34 39
84 0.3 0.3 89 0.7 0 8: 0 0.7

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
The preference ordering 84 ≻ 89 and 89 ≃ 8: cannot be represented by the linear functional
;*8, = < 6*3=
9
=>4,?=
since there exists no probability measure 6 such that the following system has solution: _

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
!84 ≻ 8984 ≃ 89
⇔ "0.36*34, + 0.36*39, > 0.76*34, + 06*39,0.76*34, + 06*39, = 06*34, + 0.76*39,
6*34, + 6*39, = 1
Remark If only the random variables 84 and 89 are considered we have that the preference 84 ≻ 89 can be represented by a linear functional, since
84 ≻ 89 ⇔ "0.36*34, + 0.36*39, > 0.76*34, + 06*39,
6*34, + 6*39, = 1

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
and the system has solutions: all pair (6*34,; 6*39,* with 6*34, < :
, and 6*39, = 1 − 6*34,. The previous example put in evidence the necessity to introduce non-linear functionals to represent preference orderings and to investigate equivalent random variables.

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
For B in B let X|B be the restriction to B of a random variable X defined on Ω and let sup X|B be the supreme value assumed by X on B. For B in B and X|B in K(B) a coherent upper conditional prevision .*8|3, is a real functional on K(B) such that the following conditions hold for every X|B and Y|B in K(B) and positive constant λ:

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
1. .*8|3, ≤ sup 8|3
2. .*48|3, = 4.*8|3, positive homogeneity
3. .*8 + 5|3, ≤ .*8|3, + .*5|3, subadditivity
4. .*3|3, = 1

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
If .*8|3, is a coherent upper conditional prevision on a linear space K(B) then its conjugate coherent lower conditional prevision is defined by .*8|3, = −.*−8|3, and
.*8|3, ≤ .*8|3, If for every X|B belonging to K(B) we have
.*8|3, = .*8|3, = .*8|3, then .*8|3, is called a coherent linear conditional prevision and it is a linear, positive functional on K(B).

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
For each X in K(B) let .*8|6) be the function defined on Ω by
.*8|6,*7, = .*8|3, if 7 ∈ 3.
.*8|6, is called a coherent upper conditional prevision and it is separately coherent if all the .*8|3, are separately coherent.

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
A necessary and sufficient condition for an upper prevision . to be coherent is to be the upper envelope of linear previsions, i.e. there exists a class M of linear previsions, defined on a same domain, such that
.*8, = sup2.*8,: . ∈ 95

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
Example 1 (continued) We consider the following class of probability measures 34 39
.4 1 0
.9 0 1
6 1 1 6 0 0

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
Let 6: be the coherent upper conditional probability defined by
6 *;, = <=?2.4*;,, .9*;,5 and let 6: be the coherent lower conditional probability defined by
6 *;, = <>?2.4*;,, .9*;,5

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
The coherent upper and lower conditional previsions can be represented as Choquet integral If the atoms 3= are enumerated so that ?= = 8*3=, are in in descending order, i.e. ?4 ≥ ?9 ≥ ⋯ ≥ ?B and ?BC4 = 0 the Choquet integral with respect to µ is given by
D E 8F6 = <*?=
B
=>4− ?=C4,6*G=,

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
where G= = 34 ∪ 39 ∪ … ∪ 3=. In Example 1 we have
.*84, = 0.3 and .*89, = .*8:, = 0 so that the preference ordering
84 ≻ 89 and 89 ≃ 8:. can be represented by the coherent lower prevision ..

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
The preference ordering cannot be represented by the coherent upper prevision . since
.*84, = 0.3 and .*89, = .*8:, = 0.7

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
A strict ordering, induced by a coherent lower conditional prevision .*⋅ |3, can be defined on the class of random variables belonging to L(B) ( Walley (Section 3.8.1)): Definition 1 We say that the alternative 8= is preferable to 8K given B with respect to .*⋅ |3,, i.e. 8= ≻∗ 8K given B if and only if
.(8= − 8KM3* > 0.

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
Some information can be lost when a strict preference order is defined by to .*⋅ |3, since . does not contain any information about which random variable, with .*8|3, = 0 are really desirable.

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
In Walley (section 3.9.4) the following definitions are given. Definition 2 Let K be a finite class of random variables. A random variable 8= in K is inadmissible in K given B if there is 8K in K such that 8K ≻∗ 8= with j≠i. Otherwise 8= is admissibile in K. Definition 2 An admissible random variable 8= in K is maximal in K given B under the coherent lower prevision .*⋅ |3, when 8= is admissible in K and

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
.(8= − 8KM3* ≥ 0 ∀8K in K.
If .*⋅ |3, is a linear prevision, the maximal random variable belonging to L(B) with respect to .*⋅ |3, is the admissible random variable 8= which satisfies
.*8=|3, ≥ .(8KM3* for all 8K in K.
Any alternative which maximizes .*8K|3, over 8K in K is called a Bayes alternative under .*⋅ |3,.

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
A Bayes random variable under a coherent lower conditional prevision is a random variable which is maximal under a linear prevision on the class of all random variables defined on B. Definition 3 An admissible random variable 8= is defined to be a Bayes random variable under a coherent lower prevision . when, for each 8K in K there is a linear prevision . ∈ 9*., such that .*8=|3, ≥ .(8KM3*∀8K in K.

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
If 8= is maximal under some . ∈ 9*., then
.*8=|3, ≥ .(8KM3* ∀8K in K so
.(8= − 8KM3* ≥ .(8= − 8KM3* = .*8=, − .*8K, ≥ 0
and 8= is maximal under .. So a Bayes random variable under a coherent lower prevision . is maximal under . but the converse is not true.
8 >O = 3=PQO R=?FS< T=R>=UVQ W?FQR . ⇒ 8 >O <=?><=V W?FQR .

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
Example 1 (continued)
Random variables
34 39
84 0.3 0.3 89 0.7 0 8: 0 0.7

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
We consider the following class of probability measures 34 39
.4 1 0
.9 0 1
6 1 1 6 0 0
We obtain .(8= − 8K* = D Z(8= − 8K*F6 < 0 for all >, [ ∈ 21,2,35 with > ≠ [
so all random variables 8= for all > ∈ 21,2,35 are admissible

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
and
.(8= − 8K* = D Z(8= − 8K*F6 ≥ 0 for all >, [ ∈ 21,2,35
so all random variables 8= for all > ∈ 21,2,35 are maximal. No random variable 8= for all > ∈ 21,2,35 is a Bayes random variable.

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
University Gabriele d’Annunzio Chieti-Pescara - Italy
Handling Uncertainty in Complex Systems
Dr. Serena Doria Department of Engineering and Geology,
University G. d’Annunzio The aim of the course is to introduce some new results proposed in literature to represent and handling uncertainty in complex systems.

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
A new model of coherent upper and lower conditional previsions based on Hausdorff
outer measures.

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
A random variable X is a bounded function from Ω to the real numbers ℝ. This function is called gamble in Walley (1991) or random quantity in de Finetti (1972, 1974).

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
For B in B let X|B be the restriction to B of a random variable X defined on Ω and let sup X|B be the supreme value assumed by X on B. For B in B and X|B in K(B) a coherent upper conditional prevision "($|&) is a real functional on K(B) such that the following conditions hold for every X|B and Y|B in K(B) and positive constant λ:

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
1. "($|&) ≤ sup$|&
2. "(-$|&) = -"($|&) positive homogeneity
3. "($ + 0|&) ≤ "($|&) + "(0|&) subadditivity
4. "(&|&) = 1

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
If "($|&) is a coherent upper conditional prevision on a linear space K(B) then its conjugate coherent lower conditional prevision is defined by "($|&) = −"(−$|&) and
"($|&) ≤ "($|&) If for every X|B belonging to K(B) we have
"($|&) = "($|&) = "($|&)

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
then "($|&) is called a coherent linear conditional prevision and it is a linear, positive functional on K(B).
For each X in K(B) let "($|3) be the function defined on Ω by
"($|3)(4) = "($|&) if 4 ∈ &.
"($|3) is called a coherent upper conditional prevision and it is separately coherent if all the "($|&) are separately coherent.

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
A necessary and sufficient condition for an upper prevision " to be coherent is to be the upper envelope of linear previsions, i.e. there exists a class M of linear previsions, defined on a same domain, such that
"($) = sup6"($): " ∈ 89

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
A random variable X on Ω is B-measurable or measurable with respect to the partition B if it is constant on the atoms of the partition B (Walley 1991, p.291).
Necessary condition for coherence If for every & ∈ 3 P(X|B) are coherent linear conditional previsions and X is B-measurable then (Walley 1991, p. 292)
"($|3) = $

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
Motivations
Why the necessity to propose a new model of coherent upper conditional prevision "($|3) ?

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
Because separately coherent upper conditional prevision "($|3) cannot always be defined as extension of conditional expectation :($|;) of measurable random variables. In fact conditional expectation :($|;) defined by the Radon-Nikodym derivative, according to the axiomatic definition, may fail to be separately coherent.

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
It occurs because one of the defining properties of the Radon- Nikodym derivative, that is to be measurable with respect to the sigma-field of the conditioning events, contradicts a necessary condition for the coherence ("($|3) = $).

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
Linear coherent conditional prevision "($|3) can be compared with conditional expectation :($|;) if the partition B generates the sigma-field G (Koch, 1997, p. 262)
:($|;)(4) = "($|&) if 4 ∈ & with & ∈ 3

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
Definition of conditional expectation (Billingsley, 1986)
Let F and G be two sigma-fields of subsets of Ω with G ⊂ F and let X be an integrable, F-measurable random variable. Let P be a probability measure on F ; define a measure = on G by
=(>) = ? $ "! .
This function is unique up to a set of P-measure zero and it is a version of the conditional expectation value.

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
This measure is finite and absolutely continuous with respect to P (i.e. "(") = 0 ⟹ =(") = 0 ∀ " ∈ & ). Thus there exists a function, the Radon-Nikodym derivative, denoted by :($|;), G-measurable, integrable and satisfying the functional equation
? :($|;) " = ? $ "!! with G in ;.
This function is unique up to a set of P-measure zero and it is a version of the conditional expectation value.

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
If linear conditional prevision "($|3) is defined by the Radon-Nikodym derivative the necessary condition for coherence "($|3) = $ is not always satisfied.

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
Theorem 1 Let Ω = [0,1], let F be the Borel sigma-field of [0,1] and let P be the Lebesgue measure on F. Let G be a sub sigma-field properly contained in F and containing all singletons of [0,1]. Let B be the partition of all singletons of [0,1] and let X be the indicator function of an event A belonging to F-G. If we define the linear conditional prevision
"($|649) equal to the Radon-Nikodym derivative with probability 1, that is
"($|649) = :($|;) except on a set N of [0,1] of P-measure zero, then the conditional prevision "($|649) is not coherent.
(Theorem 1 S. Doria, Annals of Operation Research, Vol. 195, pp. 38-44, 2012)

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
If the equality "($|649) = :($|;) holds with probability 1, the linear conditional prevision "($|649) is different from X, the indicator function of A. In fact having fixed A in F-G the indicator function of A is not G-measurable. It occurs because for every Borel set C
$+,(-) = 64 ∈ Ω ∶ $(4) ∈ -9 =

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
=
/0102∅ if 0, 1 ∉ -" if 1 ∈ - and 0 ∉ -": if 0 ∈ - and 1 ∉ -Ω if 0, 1 ∈ -
and since A ∉ G then X is not G-measurable.

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
Example 1 (Billingsley, 1986; Seidenfeld et al. 2001) Let Ω = [0,1] F = Borel sigma-field of Ω, P = the Lebesgue measure on F
G = the sub sigma-field of sets that are either countable or co-countable B = the partition of all singletons of [0,1].

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
If the linear conditional prevision is equal, with probability 1, to conditional expectation defined by the Radon-Nikodym derivative, we have that
"($|3) = :($|;) = "($)
since the events in G have probability either 0 or 1.

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
So when X is the indicator function of an event A = [a,b] with 0 < a < b < 1 then
"($|3) = "(")
and it does not satisfy the necessary condition for coherence, that is
"($|649) = $ .

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
Evident from Theorem 1 and Example 1 is the necessity to introduce a new mathematical tool to define coherent conditional previsions.

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
The model For every & ∈ 3 denote by s the Hausdorff dimension of the conditioning event B and by ℎ< the Hausdorff s-dimensional outer measure.
ℎ< is called the Hausdorff outer measure associated with the coherent upper conditional prevision "($|&).

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
Theorem 2. Let L(B) be the class of all bounded random variables on B and let m be a 0-1-valued finitely additive, but not countably additive, probability on ℘(&) such that a different m is chosen for each B. Then for each & ∈ 3 the functional "($|&) defined on L(B) by
"($|&) = ,>?(@) ? $ ℎ<@ if 0 < ℎ<(&) < +∞
"($|&) = C($&) if ℎ<(&) = 0,+∞
is a coherent upper conditional prevision. (Theorem 2 , S. Doria, Annals of Operation Research, Vol. 195, pp.38-44, 2012)

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
The unconditional coherent upper prevision "($|Ω) is obtained as a particular case when the conditioning event is Ω.
Coherent upper conditional probabilities "("|&) are obtained when only 0-1 valued random variables are considered.
Theorem 3 Let m be a 0-1-valued finitely additive, but not countably additive, probability on ℘(&) such that a different m is chosen for each B. Then for each & ∈ 3 the function "($|&) defined on ℘(&) by

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
"("|&) = ℎ<("&)ℎ<(&) DE 0 < ℎ<(&) < +∞
and by
"("|&) = C("&) DE ℎ<(&) = 0,+∞ is a coherent upper conditional probability.

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
Main Results Let B be a set with positive and finite Hausdorff outer measure in its Hausdorff dimension. Denote by
F@∗ (") = "("|&) = ℎ<("&)ℎ<(&)
the coherent upper conditional probability defined on ℘(&).
From Theorem 2 we have that the coherent upper conditional prevision "(∙ |&) is a functional on I(&) with

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
values in ℝ and the coherent upper conditional probability F@∗ integral represents "($|&) since
"($|&) = J$ F@∗ =1
ℎ<(&) J $ ℎ<@

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
If the conditioning event has positive and finite Hausdorff outer measure in its
Hausdorff dimension and K(B) is a linear lattice of bounded random variables
containing all constants
Necessary and sufficient conditions for a coherent upper conditional prevision to be
uniquely represented as the Choquet integral with respest to the upper conditional probability defined by its associated Hausdorff outer measure are to be :
Monotone Comonotonically additive Submodular Continuous from
below

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
University Gabriele d’Annunzio Chieti-Pescara - Italy
Handling Uncertainty in Complex Systems
Dr. Serena Doria Department of Engineering and Geology,
University G. d’Annunzio The aim of the course is to introduce some new results proposed in literature to represent and handling uncertainty in complex systems.

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
A new model of coherent upper and lower conditional previsions based on Hausdorff
outer measures.

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
Let B be a partition of Ω. For B in B let X|B be the restriction to B of a random variable X defined on Ω and let sup X|B be the supreme value assumed by X on B. For B in B and X|B in K(B) a coherent upper conditional prevision !(#|%) is a real functional on K(B) such that the following conditions hold for every X|B and Y|B in K(B) and positive constant λ:

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
1. !(#|%) ≤ sup #|%
2. !(,#|%) = ,!(#|%) positive homogeneity
3. !(# + /|%) ≤ !(#|%) + !(/|%) subadditivity
4. !(%|%) = 1

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
If !(#|%) is a coherent upper conditional prevision on a linear space K(B) then its conjugate coherent lower conditional prevision is defined by !(#|%) = −!(−#|%) and
!(#|%) ≤ !(#|%) If for every X|B belonging to K(B) we have
!(#|%) = !(#|%) = !(#|%) then !(#|%) is called a coherent linear conditional prevision and it is a linear, positive functional on K(B).

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
For each X in K(B) let !(#|2) be the function defined on Ω by
!(#|2)(3) = !(#|%) if 3 ∈ %.
!(#|2) is called a coherent upper conditional prevision and it is separately coherent if all the !(#|%) are separately coherent.

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
The model For every % ∈ 2 denote by s the Hausdorff dimension of the conditioning event B and by ℎ6 the Hausdorff s-dimensional outer measure.
ℎ6 is called the Hausdorff outer measure associated with the coherent upper conditional prevision !(#|%).

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
Theorem 2. Let L(B) be the class of all bounded random variables on B and let m be a 0-1-valued finitely additive, but not countably additive, probability on ℘(%) such that a different m is chosen for each B. Then for each % ∈ 2 the functional !(#|%) defined on L(B) by
!(#|%) = 89:(;) < #=ℎ6
; if 0 < ℎ6(%) < +∞
!(#|%) = !(#%) if ℎ6(%) = 0, +∞
is a coherent upper conditional prevision. (Theorem 2 , S. Doria, Annals of Operation Research, Vol. 195, pp.38-44, 2012)

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
The unconditional coherent upper prevision !(#|Ω) is obtained as a particular case when the conditioning event is Ω.
Coherent upper conditional probabilities !($|%) are obtained when only 0-1 valued random variables are considered.
Theorem 3 Let m be a 0-1-valued finitely additive, but not countably additive, probability on ℘(%) such that a different m is chosen for each B. Then for each % ∈ 2 the function !(#|%) defined on ℘(%) by

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
!($|%) = ℎ6($%)ℎ6(%) %& 0 < ℎ6(%) < +∞
and by
!($|%) = !($%) %& ℎ6(%) = 0, +∞ is a coherent upper conditional probability.

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
Main Results Let B be a set with positive and finite Hausdorff outer measure in its Hausdorff dimension. Denote by
';∗ ($) = !($|%) = ℎ6($%)ℎ6(%)
the coherent upper conditional probability defined on ℘(%).
From Theorem 2 we have that the coherent upper conditional prevision !(∙ |%) is a functional on *(%) with

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
values in ℝ and the coherent upper conditional probability ';∗ integral represents !(#|%) since
!(#|%) = , #=';∗ = 1
ℎ6(%) , #=ℎ6
;

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
If the conditioning event has positive and finite Hausdorff outer measure in its
Hausdorff dimension and K(B) is a linear lattice of bounded random variables
containing all constants
Necessary and sufficient conditions for a coherent upper conditional prevision to be
uniquely represented as the Choquet integral with respest to the upper conditional probability defined by its associated Hausdorff outer measure are to be :
Monotone Comonotonically additive Submodular Continuous from
below

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
Hausdorff outer measures Given a non-empty set Ω, let ℘(Ω) be the class of all subsets of Ω. An outer measure is a function '∗: ℘(Ω) → [0, +∞] such that '∗(∅) = 0, '∗($) ≤ '∗($2) if $ ⊆ $′ (monotonicity)
'∗ 5⋃ $7897:8 ; ≤ ∑ '∗($7)89
7:8 (subadditivity)

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
Given an additive set function ' defined on a class S properly contained in the power-set ℘(Ω) its outer measure '∗ and inner measure '∗ are defined on ℘(Ω) by
'∗($) = inf@'(%): % ⊃ $; % ∈ CD , $ ∈ ℘(Ω)
'∗($) = sup@'(%): % ⊂ $; % ∈ CD , $ ∈ ℘(Ω)

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
Examples of outer measures are the Hausdorff outer measures (named for Felix Hausdorff 1868 – 1942)

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS (Rogers C., 1970, Falconer K., 1986) Let (Ω,d) be a metric space.
Metric spaces Let Ω be a non-empty set and =: Ω × Ω → ℝ a function such that 1M) ∀ H, I ∈ Ω =(H, I) = 0 ⇔ H = I 2M)∀ H, I, K ∈ Ω =(H, I) + =(H, K) ≥ =(I, K) = is called a metric on Ω and the pair (Ω, =) is a metric space.
If in 2M) I = K, from 1M) we have

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
=(H, I) ≥ 0
If in 2M) H = K we have =(H, I) ≥ =(I, H).
Since it holds for every H, I ∈ Ω we have =(I, H) ≥ =(H, I)
That is =(H, I) = =(I, H).
A topology, called the metric topology, can be introduced in any metric space by defining the open sets of the space as the sets G with the property:

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
If x is a point of G, then for some r > 0 all points y with =(H, I) <M also belong to G.

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
Let (Ω,d) be a metric space. The diameter of a non - empty subset U of Ω is defined as
|N| = sup@=(H, I) ∶ H, I ∈ ND For δ > 0 the class @N7D7:8
89 is called a δ-cover of a subset E of Ω if
P ⊆ ⋃ N7897:8 and 0 < |N7| ≤ Q

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
Let s be a non-negative number. We define the function
ℎR6 (P) = inf S|N7|6
9
7:8
where the inferior is over all countable δ-covers @N7D7:889.

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
The Hausdorff s-dimensional outer measure of E, denoted by ℎ6, is defined as
ℎ6(P) = limR↦W ℎR6 (P)
This limit exists, but may be infinite, since ℎR6 increases as δ
decreases because less δ-covers are available.

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
Remark 1 : The limit of a monotone decreasing function when the variable δ goes to the inferior of its possible values exists and is equal to the supreme value of the possible values of the function. Remark 2: The function ℎR
6 is a decreasing function on δ,
For every Q and Q8 : Q < Q8 ⟹ ℎR6 (P) ≥ ℎR[
6 (P)
In fact if Q < Q8 the class of δ-covers is less than the class of Q8-covers because all the γ-covers with Q < \ < Q8 are Q8-covers but not δ-covers.

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
So for every subset E of Ω the function ℎR6 is a decreasing
function on δ since when δ decreases the inferior increases because it is calculated on a smaller class of δ-covers.
The Hausdorff dimension of a set A , dim](A), is defined as the unique value, such that
ℎ6($) = +∞ if 0 ≤ _ < dim]($)
ℎ6($) = 0 if dim]($) < _ < +∞

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
If 0 < ℎ6($) < +∞ then dim]($) = _, but the converse is not true (If A is a countable set → dim]($) = 0 and ℎW($) = +∞).
The Hausdorff dimension is the critical value of s at which the jump from +∞ to 0 occurs (Falconer 1990).

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
Example Let (Ω, =) be the Euclidean metric space with Ω = [0,1]`. Let P ⊆ Ω be a square of side l.

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
ℎR6 (P) = inf S|N7|6
9
7:8
|N7| = ab cde
`+ b c
de`
= cd √2 < δ
ℎR6 (P) = inf S|N7|6 = h` i j
h √2k69
7:8
ℎ6(P) = limR↦W
ℎR6 (P) = lim
d→9h` b c
d √2e6

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
_ = 0 ℎW(P) = limd→9
h` b cd √2e
W= +∞
_ = 1 ℎ8(P) = limd→9
h` b cd √2e
8= +∞
_ = 2 ℎ`(P) = limd→9
h` b cd √2e
`= 2j`
_ = 3 ℎm(P) = lim
d→9h` b c
d √2em
= 0

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
So, 0 < ℎ`(P) < +∞ ⟹ dim](P) = 2

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
A subset A of Ω is called measurable with respect to the outer measure ℎ6 if it decomposes every subset of Ω additively, that is
ℎ6(P) = ℎ6($ ∩ P) + ℎ6(P − $) for all sets P ⊆ Ω. The class of all measurable sets is a sigma-field.

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
Hausdorff s-dimensional outer measures are metric outer measures,
ℎ6(P ∪ p) = ℎ6(P) + ℎ6(p)
whenever =(P, p) = inf@=(H, I): H ∈ P, I ∈ pD > 0

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
All Borel subsets of Ω are measurable with respect to any metric outer measure (Falconer 1986, Theorem 1.5) So every Borel subset of Ω is measurable with respect to every Hausdorff outer measure ℎ6 since Hausdorff outer measures are metric.
The restriction of the Hausdorff outer measure ℎ6 to the sigma-field of ℎ6-measurable sets, containing the sigma-field of the Borel sets, is called Hausdorff s-dimensional measure.

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
The Hausdorff 0-dimensional measure is the counting measure; the Hausdorff 1-dimensional measure is the Lebeasgue measure
The Hausdorff s-dimensional measures are modular on the Borel sigma-field, that is
ℎ6($ ∪ %) + ℎ6($ ∩ %) = ℎ6($) + ℎ6(%)

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
for every pair of Borel sets A and B. So (Denneberg, 1994 Proposition 2.4) Hausdorff outer measures are submodular (or 2-alternating)
ℎ6($ ∪ %) + ℎ6($ ∩ %) ≤ ℎ6($) + ℎ6(%)

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
Denote by O the class of all open sets of Ω and by C the class of all compact sets of Ω, the restriction of each Hausdorff s-dimensional outer measure to the class H of all ℎ6-measurable sets with finite Hausdorff s-dimensional outer measure is strongly regular , that is it is regular outer regular (a) ℎ6($) = inf@ℎ6(N)|$ ⊂ N, N ∈ rD for all A∈ H inner regular (b) ℎ6($) = sup@ℎ6(s)|s ⊂ $, s ∈ tD for all A∈ H

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
With the additional property (c) inf @ℎ6(N − $)|$ ⊂ N, N ∈ rD = 0 for all A∈ H. Any Hausdorff s-dimensional outer measure is continuous from below (Falconer 1986, Lemma 1.3), that is for any increasing sequence u$vw of sets
limv→9
ℎ6x$vy = ℎ6 i limv→9
$vk

Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
Any Hausdorff s-dimensional outer measure is translation invariant (Falconer 1986, p.18)
ℎ6(H + P) = ℎ6(P) where H + P = @H + I: I ∈ PD

DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
University Gabriele d’Annunzio Chieti-Pescara - Italy
Handling Uncertainty in Complex Systems
Dr. Serena Doria
Department of Engineering and Geology, University G. d’Annunzio

DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
Cohere Coherent conditional measures of risk
Coherent conditional measures of risk defined be the Choquet integral with respect to Hausdorff outer measures and dependent risks

DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
Motivations
A new definition of coherent conditional
measure of risk based on Hausdorff outer
measures
A new definition of stochastic
independence for random variables

DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
A new model of coherent upper conditional previsions based on Hausdorff outer measures has been introduced because conditional expectation defined in the axiomatic way , by the Radon-Nikodym derivative, may fail to be coherent. (Doria, 2012 Theorem 1)

DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
A new model of coherent upper conditional prevision based on Hausdorff outer
measures (Doria, 2012 Theorem 2)
Let m be a 0-1 valued finitely additive, but not countably additive, probability on ℘(#) such that a different m is chosen for each #. Then for each # ∈ & the functionals '((|#) defined on *(#) by
'((|#) =,-. 1
ℎ1(#) 2 (3ℎ1 45 0 < ℎ1(#) < +∞#
:((#) 45 ℎ1(#) = 0, +∞
are separately coherent upper conditional previsions.

DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
• The unconditional prevision is obtained when the conditioning event is Ω.
• '((|&)(=) is the random variable equal to '((|#) if = ∈ #.

DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
Coherent upper conditional probabilities are obtained when only indicator functions of events are considered.
(Doria, 2012 Theorem 3)
Let m be a 0-1 valued finitely additive, but not countably additive, probability on ℘(#) such that a different m is chosen for each #. Then for each # ∈ & the function '(∙ |#) defined on ℘(#) by
'( |#) =,-
.ℎ1( #)ℎ1(#) 45 0 < ℎ1(#) < +∞
:( #) 45 ℎ1(#) = 0, +∞
is a coherent upper conditional probability.

DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
A coherent conditional measure of risk !(∙ |#) is a functional on the class "(#) of all random variables (or risks) defined on B, such that the following axioms are satisfied for every (, # ∈ "(#):
(i) Monotonicity ( ≤ # ⇒ !((|#) ≤ !((|#)
(ii) Subadditivity !(( + #|#) ≤ !((|#) + !(#|#)
(iii) Traslation invariance !(( + ℎ|#) ≤ !((|#) + ℎ
(iv) Positive homogeneity !('(|#) = ' !((|#)

DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
Let # ∈ & be a set with positive and finite Hausdorff outer measure in its Hausdorff dimension, i.e. 0 < ℎ1(#) < +∞, the functional !(∙ |#) defined on L(B) by
!((|#) = '((|#) = 1ℎ1(#) 2 (3ℎ1
(
is a coherent conditional measure of risk, which is comonotonically additive and continuous from below.

DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
MOTIVATIONS
• In a continuous probabilistic space, where the probability is usually assumed equal to the Lebesgue measure, the standard definition of independence given by the factorization property
'( ∩ #) = '( )'(#)
is always satisfied for finite, countable and fractal sets (i.e. sets with non integer Hausdorff dimension) since both members of the equality are zero.

DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
Hausdorff dimension of a set
Ω
DimH=2
DimH=1

DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
Sierpinsky Triangle
DimH=
log3/log2

DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
• If coherent upper and lower conditional probabilities are defined by outer and inner Hausdorff measures, an event B is always irrelevant, according to the definition proposed by Walley, to an event A if
dim-A < dim-B < dim-Ω. In fact the equalities
'( |#) = '( |#0) = '( |Ω)
'( |#) = '( |#0) = '( |Ω)
vanish to 0=0.
So the notion of s-irrelevance for events has been introduced (Doria 2007).

DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
B is s-irrelevant to A if the following conditions hold
dim-A = dim-B = dim-AB
'( |#) = '( |#0) = '( |Ω)
'( |#) = '( |#0) = '( |Ω)
If B is s-irrelevant to A and A is s-irrelevant to B thus
A and B are s-independent

DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
S-irrelevance and s-independence for random variables
The class of the weak upper level sets of the random variable X
1 = 23= ∈ Ω: ((=) ≥ 67 6 ∈ ℜ 7
Ω = [0,1]
A
X x
1

DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
The atoms of the class 1 of the weak upper level sets of the random variable X are the minimal sets with respect to inclusion in 1 − ∅
1(() = 3 7
1(() = 23 7 ∪ 3#7>
X
B A

DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
The atom is the union of the points where the random variable assumes the maximum value.
If a random variable X is such that the class of the upper level sets contains the n-Cantor sets ?@ where
?A = [0,1] , ?B = C0, BDE ∪ CF
D , 1E ,
?F = C0, BGE ∪ CF
G , BDE ∪ CF
D , HGE ∪ CI
G , 1E…….
? = ?JKLMN OPL = Q ?@
R
@SB
1(() = 3?7 34:T? = UVWFUVWD

DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
This kind of structure of the upper level sets and of the atom describes stability in the random variable because we know that after a certain interval (of time) the random variable assumes again the maximum value.

DOCTO
RAL COURSE IN EARTH SYSTEM
S AND BUILT ENVIRONM
ENTS
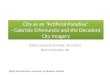
Jan-38 M
ay-01
The blue graph is related to the rainfalls in S. Eufemia ( a m
ountain village near Pescara, Abruzzo, Italy))
The pink graph is related to the water flow
rate of the source Sorgente Verde (Abruzzo, Italy). Sorgente Verde has been a w
ater source not dry during this period (and also now
). (The author is grateful to Prof. Rusi -Dept. InGeo- for the data and the graph)
0,0
0
1,0
0
2,0
0
3,0
0
4,0
0
5,0
0
6,0
0
0
10
0
20
0
30
0
40
0
50
0
60
0
gen-38set-38mag-39gen-40set-40mag-41gen-42set-42mag-43gen-44set-44mag-45gen-46set-46mag-47gen-48set-48mag-49gen-50set-50mag-51gen-52set-52mag-53gen-54set-54mag-55gen-56set-56mag-57gen-58set-58mag-59gen-60set-60mag-61gen-62set-62mag-63gen-64set-64mag-65gen-66set-66mag-67gen-68set-68mag-69gen-70set-70mag-71gen-72set-72mag-73gen-74set-74mag-75gen-76set-76mag-77gen-78set-78mag-79gen-80set-80mag-81gen-82set-82mag-83gen-84set-84mag-85gen-86set-86mag-87gen-88set-88mag-89gen-90set-90mag-91gen-92set-92mag-93gen-94set-94mag-95gen-96set-96mag-97gen-98set-98mag-99gen-00set-00mag-01
Pio
gge (m
m) S
Eu
fem
iaP
orta
ta to
tale
(m3/se
c)

DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
S-irrelevance and s-independent for random variables
Let X and Y two random variables and let S(X) and S(Y) respectively the classes of their atoms.
S(Y) is s-irrelevant to S(X) if for every E ∈ S(X) and F ∈ S(Y)
Y is s-irrelevant to X ⇔ S(Y) is s-irrelevant to S(X)
X and Y are s-independent ⇔ S(X) is s-irrelevant to S(Y) and S(Y) is s-irrelevant to S(X)

DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
S-dependent random variables
1(() = 3 7 1(#) = 3#7
Ω = [0,1]
34:T = 34:T# = 0 ≠ 34:T #
X
B
Y
A

DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
Since # = ∅
⇓
X and Y are s-dependent

DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
S-independent random variables
Ω = [0,1]
3/4 1/2 1/4 1
B
X
Y
A

DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
34:T = 34:T# = 34:T # = 1
'( |#) = '( |#[) = '( )
'(#| ) = '(#| 0) = '(#)
⇓
X and Y are s-independent

DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
• can be represented as Choquet integral• are comonotonically additive • are countinuous from below
Coherent conditional measures of risk based on
Hausdorff outer measures
• s-independence of the indicator functions of two sets does not imply s-independence of the indicator functions of their complements
• s-independence for random variables does not imply the factorization of the joint distribution into the product of the marginal distributions
S-independence for random variables or
risks

DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
According to the axiomatic definition two random variables X and Y are independent if and only if the sigma-fields generated by them, are independent. Since the sigma-field generated by a random variable X is the smallest sigma-field with respect to which X is measurable, it contains the inverse image of all borelian sets of ℜ. So if the random variables X and Y are independent then the joint distribution is equal to the product of the marginal distributions.

DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
S-independence of random variables X and Y does not imply that the joint distribution is equal to the product of the marginal and . It occurs because s-independence between random variables implies that the factorization property holds only for the atoms (i.e. minimal sets with respect to the inclusion) of the classes generated by the weak upper level sets of X and Y and not for all sets of the sigma-fields generated by X and Y .

DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
Handling Uncertainty in Complex Systems
Dr. Serena Doria
Department of Engineering and Geology, University G. d’Annunzio
The aim of the course is to introduce some new results proposed in literature to represent and handling uncertainty in complex systems.

DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
Iterated function systems
Let (ℜn, d) be the Euclidean metric space. A function f : ℜn → ℜn is called a contraction if
d( f (x), f (y)) ≤ rd(x, y) for all x, y ∈ ℜn, where 0 < r < 1 is a constant. The infimum value for which this inequality holds for all x, y is called the ratio of the contraction. A contraction that trasforms every subset of ℜn to a geometrically similar set is called a similitude. A similitude is a composition of a dilation, a rotation and translation. A set E is called invariant for a finite set of contractions f1, f2, ..., fm if
# = % &'
(
')*(#)

DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
If the contractions are similitudes and for some s we have
hs(E) > 0 and
hs( fi(E) ∩ fj(E)) = 0 for - ≠ / then E is self similar. For any finite set of contractions there exists a unique non-empty compact invariant set K (Falconer, 1986, Theorem 8.3), called attractor. Given a finite set of contractions f1, f2, ..., fm we say that the open set condition (OSC) holds if there exists a bounded open set O such that
O ⊂⋃ &'(O) (')* and &'(O) ∩ &5(O) = ∅ for - ≠ /.
If f1, f2, ..., fm are similitudes with similarity ratios ri for i = 1...m the similarity dimension, which has the advantage of being easily calculable, is the unique positive number s for which

DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
7(89): = ;<
9);
If the OSC holds then the compact invariant set K is self-similar and the Hausdorff dimension and the similarity dimension of K are equal.

DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
The model of Sierpinski triangle
Let’s try to clarify what above said by introducing a classic
example of an attractor of a family of similarities known as
Sierpinski triangle.
Let = = >?, ;! × >?, ;! (the square in the figure) e let E be
the triangle of vertices O(0,0), A(1,0), B#;$ , ;%.
All points & ∈ = represent the possible states in which the
system is to be situated after the first meeting.
E

DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
Let consider the following family of similarities '(9)9);* :
(;: ,- = ;
$ .
/ =;
; $ 0
($: ,- = ;
$ .
/ =;
; $ 0 + ;
$
2$: ,- = ;
$ . + ;$
/ =;; $ 0 + ;
$
.
Iteratively applying the three transformations to the initial
triangle E you get the attractor of the system of similarities,
known as the Sierpinsky triangle shown in the following
figure:

DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
The Hausdorff dimension of the Sierpinski triangle coincides
with the size of the similarity dimension s and is calculated
by solving the equation (1):
* 3;$4
:= ;
that is : = 567$567* < $ .
The Sierpinski triangle is a fractal, because its Hausdorff
dimension has a fractional number, and is self-similar
because its geometric structure is repeated identically at
different scales. This property is also expressed by saying

DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
that a single part reproduces the whole. In addition, the
Sierpinski triangle presents symmetries.
Fractal Antennas
Since fractals show up in the real world of nature (snail shells, leaves on a tree, pine cones), why not see if they perform well as antennas? It turns out that if you make antennas with fractal shapes, they will radiate, and often have multiband properties. Exmaples of these antennas are below:

DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara

DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
s-Independence for curves filling the space The notions of s-irrelevance and s-independence for events A and B that are represented by curves filling the space are analyzed. In particular Peano curve, Hilbert curve and Peano-Sierpinski curve are proven to be s-independent. Curves filling the space Sagan (1994) can be defined as the limit of a Cauchy sequence of continuous functions fn, each mapping the unit interval into the unit square. The convergence is uniform so that the limit is a continuous function, i.e. a curve.
Six iterations of the Hilbert curve construction, whose limiting space-filling curve was devised by
mathematician David Hilbert.

DOCTORAL COURSE IN EARTH SYSTEMS AND BUILT ENVIRONMENTS
Handling Uncertainty in Complex Systems – Serena Doria -University G. d’Annunzio Chieti - Pescara
Definition Let (Ω, d) be a metric space and let A and B be two curves filling the space _. Then A and B are s-independent if the following conditions hold • 1s) dimH(AB) = dimH(B)= dimH(A) • 2s) P(A|B) = P(A) and P(A|B) = P(A); • 3s) P(B|A) = P(B) and P(B|A) = P(B); Moreover B is s-irrelevant to A if conditions 1s) and 2s) are satisfied. Theorem Let Ω = [0, 1]n and let :; and : be the upper and lower conditional probabilities defined as in Theorem 4. If A and B are two curves filling the space then A and B are s-independent.