Embed Size (px)
Citation preview

HANDLING SPATIAL ALIASING IN SPHERICAL ARRAY APPLICATIONS
Jens Meyer and Gary W Elko
mh acoustics25A Summit Ave.
Summit, NJ 07901, USA
ABSTRACT Another characteristic that determines the number of re-quired sensors is the upper frequency limit of the operating
Spherical microphone arrays are an attractive solution for bandwidth of the array. As with conventional arrays this up-many audio applications where flexible beamforming in all per frequency limit is determined by spatial aliasing. Spatialdirections is desired. However, as with all discretely sampled aliasing occurs when the spacing between adjacent sensorsarray systems, spatial aliasing puts a constraint on the upper becomes too large. The topic has been treated by other au-operating frequency range and therefore limits some poten- thors before, e.g. [4], [6]. However, no practical solutiontial applications. Simply increasing the number of sensors has been suggested for non-spatially-bandlimited soundfields.to overcome the effect of spatial aliasing is effective but can This work takes a closer look at the spatial aliasing and de-be expensive, especially if very high quality microphones scribe several solutions to reduce it.elements are used. This paper reviews the origin of spatialaliasing for spherical arrays based on modal beamformingand investigates alternative approaches to mitigate the spatial 2. MODAL BEAMFORMINGaliasing problem. The alternative approaches are based on:spatial anti-aliasing filters, exploiting the natural diffraction Spherical array beamforming is motivated by the fact that ev-of the spherical baffle and compromising the directivity at ery soundfield on a spherical surface can be expressed as ahigher frequencies. All approaches are practical and can be series of orthonormal spatial spherical harmonic modesimplemented without increasing the system cost significantly. 00 n
Index Terms- Microphone array, spherical microphone P(ka, i9, (o) = bn(ka) E3 AnmymYA(t, ()), (1)array, spatial aliasing
where bn describes the modal response, Ynm are the spherical1. INTRODUCTION harmonics of order n and degree m (see [7] for more details),
k is the wavenumber and a is the radius of the sphere. bnSpherical microphone arrays have gained attention over the can be determined analytically once the array setup is knownpast few years ([1], [2], [3], [4], [5]). Due to their inherent (surface impedance, radial microphone position, nearfield vs.
characteristics spherical arrays are an attractive solution for farfield sources. etc.). The coefficients bn are discussed laterapplications such as conferencing systems or room acoustic in more detail. All soundfield spatial information is containedmeasurement tools, to name just a few. Among others the ma- in the Anm coefficients. The idea of the modal beamformingjor characteristics are (a) a coverage of the three-dimensional is to decompose the soundfield into its modal components and(3D) space independent of direction and (b) the beamformer therefore gain access to the the soundfield information Anmmassociated with the array can be implemented in an efficient For an ideal continuous microphone aperture the isolationmanner as modular blocks allowing for independent control of modes can be done by applying a pressure sensitive mate-of the beam pattern and steering direction. rial on the spherical surface where the sensitivity M(i', 0) is
A potential drawback for spherical arrays is the relatively equivalent to the complex conjugate spherical harmonic:large number of microphones that are required. It can beshown that at least (N + 1)2 sensors are required where N Fnmin ] P(ka, V, ~o)M(i(, o) dQis the highest order mode that the array uses for beamform- Xing. The higher the order N the higher the spatial resolution f m ,of the array. For real-time arrays a maximum order of N =4 = jyP(kat,t0,c,)Ynm, (t$O,co) dQis a reasonable compromise between good spatial resolution Xand cost for the array (hardware as well as processing power). = bn' (ka)An',m' (2)
978-1-4244-2338-5/08/$25.00 ©C2008 IEEE 1 HSCMA 2008

Since bn are known, the soundfield information Anm,Tn' can be +easily computed. M stands for the aperture sensitivity func- n=1tion and F is the array factor (note that at this point the aper- x n=2
n=3ture is continuous and the term array is technically not cor--*rect). The result given in Equ. 2 is derived simply by applyingthe orthonormality characteristic of spherical harmonics: 5 -20 0 n=6
E A 9
Q5 -35/------------>/--yv)1yvrJ42........-30
3. THE ORIGIN OF THE SPATIAL ALIASING 0.5 1 2 5 10ka
Although solutions exist that allow one to realize a continu-ous spherical aperture, it is not practical since one would only Fig. 2. Modal response of a spherical array with sensorshave access to one mode at a time. To overcome this limita- mounted flush in an acoustically rigid sphere.tion one can sample the aperture at positions [a, Is, (s] andthen apply weights to the sampled positions to extract multi-ple modes in parallel. This approach basically leads to mul- However.tsearnements t a ve.tiple weight-and-add beamformers, one for each mode. The performance outside the designed range.tiple~~~~wegtan,dbafresonfrechmd. Te
Up to this point the modal response bn have been ne-array factor for mode in, m' for the sampled aperture iS ex- U oti on h oa epneb aebe epress fas:or for mode n',m' glected. For a spherical array mounted on the surface of a
rigid sphere bn becomes [7]:S-1
Fn',m' S P(ka, t, Wo)M(i.s, ( bn(ka) = jn(ka) h( )(ka) (5)s=O h$P2/(ka)n00
5 bn (ka) x and is plotted in Fig. 2. Combining the modal response withn=O the aliasing error one can see that the 6th-order aliasing only
n S-I starts for about ka > 4. Below this the 6th-order mode isE AnmT Ynm(,s, os)Yn7 (,s, fos) (4) virtually not present. For an array with a radius of 4cm this
m=-n s=O implies that the theoretical upper frequency limit for 4th-order
an_ni,m/±e(in,m,in',m') modes is about 5.5kHz. Above this frequency the 4th-ordermodes will be seriously aliased by 6th order modes (and more
where F is the array factor of the discretely sampled aper- higher order modes as the frequency continues to increase).ture. In cases where the last sum in Equ. 4 fulfills the or-thonormality constraint (e = 0), the array output agrees with 4. APPROACHES TO OVERCOME SPATIALthe continuous solution: F = F. However, due to the typi- ALIASINGcally non-spatially-bandlimited nature of soundfields aliasing(e :t 0) will occur for all but very simple soundfields. From The most obvious solution to spatial aliasing is to employ aEqu. 4 it is also obvious that aliasing depends to a great ex- more dense sensor arrangement. This would either mean antend on the sensor positions. This makes it difficult to present increase in the number of sensors or a reduction in radius. Thea general closed-form mathematical description. In the fol- first approach can become prohibitively expensive while thelowing we focus on the characteristics of a 32-element array second one is not desirable due to poorer low frequency noisegeometry where the microphones are placed at the center of performance [8]. Next, three alternative approaches are pro-the faces of a truncated icosahedron. posed to reduce spatial aliasing in spherical arrays. The solu-
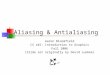
Figure 1 shows the level of the aliasing error e(n, m, n', tions require little or no additional resources and are thereforem') as a function of the order and degree of the spherical of practical relevance.harmonics. For easier visualization the order n and degree mare transformed to an index nm = (n + 1)2 - n + m. White 4.1. Limit spatial resolution at high frequencieslines are added to help separate the different orders n visually.The figure shows that the array is capable of extracting modes The first approach is motivated by a closer view at Fig. 1. It isup to 4th-order with little or no aliasing. Significant aliasing obvious that the higher order modes are more prone to spatialstarts to with 6th-order soundfield modes leaking into the 4th- aliasing than the lower order modes. For example the 1st-order beam. Note that other configurations with 32 sensors order mode experiences its first aliasing from the 9th-orderexist (e.g. [4]) that have no aliasing error up to 4th-order. mode. From Fig. 2 it canbe seen that the 9th-ordermode only
2

20
25
10 20 30 40 50 60 70 80 90 100nm
Fig. 1. Aliasing for the 32 element truncated icosahedron geometry.
contributes significant energy from about ka > 7 onwards.Therefore, by scaling back in directivity from a forth order 10 + n=0pattern to a first order pattern at high ka one can extend the 5 ° n=1
* n=2frequency range from about ka = 4 to about ka = 7. o n-3Note that the ka values and mode orders in this section x n=4
are specific to the truncated icosahedron sampling. However, | n=6the general trend should hold for other sampling schemes as LAwell.
-20-
4.2. Use of spatial anti-aliasing filter -25-
Time domain processing commonly employs anti-aliasing 10 20 30 40 60 80low-pass filters. Unfortunately, spatial anti-aliasing filter are ° [ ]not as easy to deploy. The following development of anextended sensor covering an area of the spherical array sur- Fig. 3. Sensitivity of a conformal patch sensor to modes 0 toface gives a qualitative analysis that can be used to compute 6 depending on the size of the sensor.the spatial filter operation of a larger microphone. Spatialanti-aliasing filters are also explored in [6].
To gain some insight in the modal low pass filter we startby looking at a continuous circular conformal sensor aperture Tmoa2 w(1-cosido) ,n =othat covers the pole of a sphere. To keep the analysis simple M 2 / xwe assume a constant sensitivity mo. The sensor output can 1 2n+±1then be computed according to: (Pn_2(costo)- Pn+±(costo)) n>O
'Of (7)F mo ] P(w, r, io)dQC The result from Equ. 7 is plotted in Fig. 3. Note that the
modal sensitivity is shown relative to the mode 0. The ordi-nate indicates the size of the sensor represented by the open-
S nb1(w, r)AAn (i, 0) x ing angle 00. To the left side the sensor is small, to the ex-n=O treme it is a point source or a spatial Dirac function. Com-
2-r do paring the values towards the left of Fig. 3 one finds that
moa2 f nY(ji,cc)sin(c)ddfdc (6) they agree with the spherical harmonic transform of the spa-JJ tial Dirac function. Towards the right side of the figure the
> ' ~~~~~~sensor increases in size and its sensitivity to the higher or-Mn (Wo mo ,a) der modes starts to drop. The uniform weighing of the sen-
Equation 6 introduces the new measure Mn2. This measure sor aperture results in rather large sidelobes. These can becan be seen as the sensitivity of the sensor to a mode of order reduced by optimizing the aperture weighting function. The
3

result shows that a rather large sensor (do = 30) will be re-quired to attenuate modes of order 6 and higher. ka = 0.5 90
To apply 32 sensors of the required size onto a sphere - - ka=8.0is not practical since the sensors would overlap significantly. 1soDka = 30A solution is to sample the continuous aperture with smallsensors, making sure to place small sensors dense enough toavoid spatial aliasing up to the desired frequency limit. Small 180 Osensors in the overlapping region can be used by all channelscovering this space. Sampling the large sensor area with small Vsensors also allows for easier implementation of an aperture 21 330
weighting function.At a first glance this solution seems to increase the sys- 24 0
tem cost significantly since the number of sensors requiredbecomes much larger. However, (a) the number of input chan-nels stays the same (in our example 32) and (b) since eachinput channel is now made up of many small microphones Fig. 4. Directivity pattern for an omnidirectional sensorone can use inexpensive capsules and still obtain good noise mounted flush on the surface of an acoustically rigid sphere.performance. One can also expect that the sensor tolerances- typically a major concern for array beamforming - are less 6 REFERENCESimportant since they will tend to average out among the manysensors that make up each input channel. [1] Meyer J. and Elko G. W., "A highly scalable spherical
microphone array based on an orthonormal decomposi-4.3. Using the natural diffraction of the sphere tion of the soundfield," Proc ofIEEE ICASSP, vol. II, pp.
1781-1784,2002.Utilizing the diffraction of the rigid spherical baffle is suit-able for spherical arrays that are mounted on the surface of an [2] Abhayapala T. D. and Ward D. B., "Theory and designacoustically rigid sphere. The sphere acts as an acoustic scat- of higher order sound field microphones using sphericalterer which results in a direction dependent sensitivity for an microphone arrays," Proc of IEEE ICASSP, vol. II, pp.omnidirectional microphone that is positioned at or close to 19491952,2002.the surface of the sphere. This means that an omnidirectional [3] Daniel J. and Moreau S., "Further study of sound fieldsensor actually becomes a directional sensor. This effect if coding with higher order ambisonics," Proc. 116th AESmore prominent towards higher frequencies. Fig. 4 shows the Convention, 2004.resulting directivity pattern for an omnidirectional point sen-sor positioned flush on the surface of a rigid sphere for several [4] Li Z., Duraiswami R., Grassi E., and Davies L. S., "Flex-frequencies ka. It can be seen that for ka = 2 and above the ible layout and optimal cancelation of the orthonormal-sensor exhibits directional properties. The maximum Direc- ity error for spherical microphone arrays," Proc ofIEEEtivity Index that is achieved towards higher ka is about 3.2dB. ICASSP, pp. 41-44, 2004.The Directivity Index will increase further if one uses mico-phone with larger membranes. [5] Rafaely B., "Analysis and design of spherical microphone
To overcome the spatial aliasing one can exploit the scat- arrays," IEEE Trans. Speech Audio Process., vol. 13, no.tering and diffraction and use the output of the sensor closest 1, pp. 135-143,2005.to the current look-direction at high frequencies. Since only a [6] Rafaely B., Weiss B., and Bachmat E., "Spatial alias-single sensor is used no spatial aliasing will occur. ing in spherical microphone arrays," IEEE Trans. Signal
Process., vol. 55, no. 3, pp. 1003-1010,2007.
5. CONCLUSION [7] E.G. Williams, Fourier Acoustics, Academic Press, SanDiego, 1999.
This paper presented three practical approaches to reduce theeffect of spatial aliasing. The solutions emphasize the practi- [8] Meyer J. and Elko G. W., "Spherical microphone ar-cality of an implementation. The first (sec. 4.1) and last (sec. rays for 3d sound recording," in Audio Signal Process-4.3) approach can be used in most current systems since it re- ingfor Next-Generation Multimedia Communication Sys-quires only a modification in the processing algorithm while tems, J. Benesty Y. (A.) Huang, Ed. Kluwer Academicthe second approach (sec. 4.2) would require a new physical Publishers, Boston, 2004.array setup.
4