Embed Size (px)
DESCRIPTION
GV for NASA GSFC’s data assimilation research Arthur Y. Hou NASA Goddard Space Flight Center. 2 nd International GPM GV Workshop, 27-29 September 2005, Taipei, Taiwan. Data assimilation requires knowledge of observation errors. - PowerPoint PPT Presentation
Citation preview

Hou/JTST2000 - 1
GV for NASA GSFC’s data assimilation research
Arthur Y. Hou
NASA Goddard Space Flight Center
2nd International GPM GV Workshop, 27-29 September 2005, Taipei, Taiwan

A. Hou. 2ndInternational GPM GV Workshop - 2
The effect of precipitation observation on the atmospheric analysis is determined by the spatial structures of observation errors and forecast model errors.
Ground-based observation systems can provide independent measurements for determining the error characteristics of satellite-based precipitation products.
Data assimilation requires knowledge of Data assimilation requires knowledge of observation errorsobservation errors

A. Hou. 2ndInternational GPM GV Workshop - 3
The type of error The type of error mattersmatters
In data assimilation it is crucial to differentiate systematic errors from random errors because:
The analysis equation is based on the following assumptions:– The underlying statistics are random, unbiased, stationary, and normally
distributed
– Observation and background errors are uncorrelated.
This means that any systematic error in observations be removed.
The random components of observation or background errors are typically parameterized based on known error statistics - often with simplifying assumptions (e.g., homogeneous, isotropic, separable horizontal and vertical structure functions).
This requires that the observables being assimilated have well-defined error statistics to guide the construction of error covariance models.

A. Hou. 2ndInternational GPM GV Workshop - 4
Impact of bias uncertainty on water/energy budget analysesImpact of bias uncertainty on water/energy budget analyses
Impact of rainfall assimilation on the global P-E budget
Precipitation (Global) Evaporation (Global)
Understanding and removal of biases in precipitation observations are essential for obtaining unbiased analysis for climate research and NWP.
Difference between GEOS-3 analyses with and without TMI+SSM/I rainfall data is ~ 0.5 mm/d for the tropics and ~ 0.3 mm/d for the global mean.
Constraining rainfall but not evaporation with observations leads to an imbalance in the P-E budget, which could be used to diagnose model errors and guide improvements in evaporation and land surface modeling – but only if bias uncertainty in observed global rain is << 0.3 mm/d.
In terms of energy fluxes, a global-mean bias of 0.13 mm/d in rain rate is comparable to 4 Wm-2 signal from CO2 doubling.

A. Hou. 2ndInternational GPM GV Workshop - 5
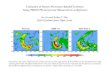
Bias uncertainty in current rainfall observationsBias uncertainty in current rainfall observations
mm/d PR and TMI V6 monthly global mean rain rates differ by 7%, or ~ 0.2 mm/d.
Uncertainties in rain algorithms may account for this. But undetected low rain rates by PR/TMI could add up to 0.07 (?) mm/d (assuming 1% of all raining grids are light rain).
GPM will have the ability to measure light rain rates to reduce this uncertainty. Ground measurements form an important part of the validation strategy.
0.5o x 0.5o January 1998
PR RR 0.1 1 10 102 (mm/d)
TM
I m
inus
PR
RR
(m
m/d
)

A. Hou. 2ndInternational GPM GV Workshop - 6
Variational assimilation of precipitation data Minimizing a cost function that measures the distance between observation yo and model estimate H(x), subject to physical model constraints:
J(x) = (xb – x)T P-1 (xb – x) + ( yo – H(x))T (Ro + Rf )-1 ( yo – H(x))
The observation operator H (forward model) is a physical model of precipitation, which may be a function of space and time (e.g., 4DVAR).
P, Ro, & Rf are error covariances characterizing the forecast model, observations, and the forward model. They define both the problem and the solution.
Minimization is done w.r.t. a control variable x, which may be the initial condition, a model tendency correction, or a model physics parameter. (The choice of x affects the form of P. The transformation of yo affects the construction of Ro, and Rf ).
For a linear H and Gaussian statistics, the analysis xa is given by:
xa = arg{min J(x)} = xb + PHT (HPHT + Ro + Rf )-1( yo – H(xb))
Use of random error information in data assimilationUse of random error information in data assimilation
“analysis increment” (correction vector)
Structure determined by P, Ro, Rf, and HT

A. Hou. 2ndInternational GPM GV Workshop - 7
Ro is the total precipitation observation error including
- measurement errors - retrieval errors associated with radiation and cloud-resolving models- error of representativeness (if averaged over space and time)
Ro is user-defined – depending on data usage and possible transformations of the observation variable to render errors more consistent with underlying statistical assumptions (e.g., rain rate vs. log of rain rate).
In practice, observation error covariances are parameterized. The current error models for precipitation are exceedingly simple: typically, Ro = <(o-bo)(o-bo)T> = o
(RR), where = error std. dev., i.e., errors are not correlated in
space or time.
Forward model error covariance Rf associated with parameterized precipitation physics is generally not known and consequently ignored.
Precipitation error covariance modelsPrecipitation error covariance models

A. Hou. 2ndInternational GPM GV Workshop - 8
Impact of incorrect observation error Impact of incorrect observation error specificationspecification
An idealized example: Assuming xb = xt + b, yo = yt + o, where x is the control variable in specific humidity, y is the vertical rain profile, b and o are background and observation errors characterized by P and Ro, respectively.
If o is vertically correlated, assimilating the rain profile assuming no correlation leads to suboptimal use of data and less accurate analysis.
Independent observations provide more information
(mm/h)
(Correct correlation length:+/- 2 levels)M
odel
leve
l
(Incorrect length = 0)
FG
RR(mm/h) and q(g/kg)
Mod
el le
vel
yo: Rain
xbSpecific humidity
b

A. Hou. 2ndInternational GPM GV Workshop - 9
Sensitivity of analysis and forecast to Sensitivity of analysis and forecast to precipitation observation errorprecipitation observation error
5-Day Bonnie forecast issued from 12 UTC 8/20/98 Impact of assigned rain errors on GEOS-3 moisture tendency correction
o = 30%
o = 80%
o = 250%
TMI + SSMI sfc rain
Sensitivity of track forecast to weights assigned to rainfall data in the initial condition
Correlation of precipitation forecast with TMI+SSM/I rain rates (20ox30o moving domain)
Difference in rain forecasts smaller than TMI+SSM/I sampling errors
(Estimated o
for 1ox1o RR ~ 15-50%)

A. Hou. 2ndInternational GPM GV Workshop - 10
Modeling error covariances using GV observationsModeling error covariances using GV observations
J(x) = (xb – x)T P-1 (xb – x) + ( yo – H(x))T (Ro + Rf )-1 ( yo – H(x))
Assimilation requires knowing the sum of Ro+ Rf , which may be estimated from observation minus forecast (O-F) statistics if the inputs (T,q,..) for H are highly accurate: <(O-F)(O-F)T> = Ro+ Rf .
Note that no explicit knowledge of Ro is needed for evaluating Ro+ Rf
This is possible at the “precipitation process” type of GV sites, which can provide not only precipitation measurements for determining Ro, but also ancillary observations needed for computing H to estimate Ro+ Rf using O-F statistics (in either physical or radiance space depending on the assimilation method).
Knowing Ro will make it possible to estimate Rf , which is needed in order to make better use of precipitation products in data assimilation.

A. Hou. 2ndInternational GPM GV Workshop - 11
SummarySummary
Precipitation measurements at GV sites may be used to estimate the spatial structure of Ro associated with satellite precipitation estimates.
Precipitation assimilation requires knowing the sum of Ro+ Rf . But Rf is generally not known. Ancillary measurements at GV sites can be used to directly estimate the combined error Ro+ Rf (in either physical or radiance space).
Knowing both Ro and Ro + Rf makes it possible to estimate Rf . The knowledge of Rf at multiple GV sites may allow Rf to be parameterized in terms of local variances and correlation functions.
A parameterized model of Rf could ultimately lead to the more effective use of precipitation information in data assimilation.