Embed Size (px)
Citation preview

Research Article119867infin
Guaranteed Cost Fault-Tolerant Control of Double-FaultNetworked Control Systems Piecewise Delay Method
Qixin Zhu 123 Kaihong Lu2 and Yonghong Zhu4
1School of Mechanical Engineering Suzhou University of Science and Technology Suzhou 215009 China2School of Electrical and Automation Engineering East China Jiaotong University Nanchang 330013 China3Jiangsu Province Key Laboratory of Intelligent Building Energy Efficiency Suzhou University of Science and TechnologySuzhou 215009 China4School of Mechanical and Electronic Engineering Jingdezhen Ceramic Institute Jingdezhen 333001 China
Correspondence should be addressed to Qixin Zhu bob21cn163com
Received 23 June 2018 Revised 13 November 2018 Accepted 29 November 2018 Published 3 January 2019
Academic Editor Sabri Arik
Copyright copy 2019 Qixin Zhu et al This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
The term double-fault networked control system means that sensor faults and actuator faults may occur simultaneously innetworked control systems The issues of modelling and an 119867infin guaranteed cost fault-tolerant control in a piecewise delay methodfor double-fault networked control systems are investigated The time-varying properties of sensor faults and actuator faults aremodelled as two time-varying and bounded parameters Based on the linear matrix inequality (LMI) approach an 119867infin guaranteedcost fault-tolerant controller in a piecewise delay method is proposed to guarantee the reliability and stability for the double-faultnetworked control systems Simulations are included to demonstrate the theoretical results of the proposed method
1 Introduction
Networked control systems (NCS) are frequently encoun-tered in many fields of applications due to their suitableand flexible structure [1ndash9] However in practical NCS thereinevitably exists time delay and data packet dropouts becauseof the introduction of the communication network [10ndash13]Sensor faults and actuator faults also occur easily at the devicelevel because of its large scale and complicated structure [14]which can have a negative impact on the system such asperformance decline and instability Thus guaranteed costand fault-tolerant control of networked control systems hasbecome a new popular issue in the network control field
To achieve stability requirements concerning sensorfaults or actuator faults fault-tolerant control has beeninvestigated in many works [15ndash26] Based on the Lyapunovstability theorem a methodology for the design of fault-tolerant control systems for chemical plants with distributedinterconnected processing units was presented by N H El-Farra and A P D Gani [15] Z Qu and C M Ihlefeld deviseda fault-tolerant robust controller for a class of nonlinear
uncertain systems considering possible sensor faults anddeveloped a robust measure to identify the stability- andperformance-vulnerable failures [16] Based on the integritycontrol theory a robust fault-tolerant controller for NCSwithactuator faults was discussed by Y N Guo [17]The diagnosisof actuator component faults and fault-tolerant control for aclass of networked control systems using adaptive observertechniques was investigated in [18] A switched model basedon probability for NCS was proposed in [19] to researchissues of fault-tolerant control when actuators age or becomepartially disabled
Recently guaranteed cost control that can guarantee thestability of a system and make it meet a certain performanceindicator has become popular in NCS [4ndash7 27ndash29] Stabilityguaranteed active fault-tolerant control against actuatorsfailures in NCS was addressed by S Li [27] X Y Luo andM J Shang proposed the so-called guaranteed cost activefault-tolerant controller (AFTC) strategy in [28] The issue ofguaranteed cost reliable control with regional pole constraintagainst actuator failures was investigated by H M Soliman
HindawiMathematical Problems in EngineeringVolume 2019 Article ID 6348727 19 pageshttpsdoiorg10115520196348727
2 Mathematical Problems in Engineering
in [6] In [7] X Li investigated the issue of integrity againstactuator faults for NCS under variable-period sampling inwhich the existence conditions of a guaranteed cost fault-tolerant control law was tested in terms of the Lyapunov sta-bility theory The resilient reliable dissipativity performanceindex for systems including actuator faults and probabilistictime delay signals is investigated by authors in [30 31] Unfor-tunately all the previously mentioned literature investigatedthe guaranteed cost fault-tolerant control for NCS of single-faults (just considering the condition that only actuator faultsoccur or sensor faults occur) Few articles examine thedouble-fault issue In practical application it is easy for thesensors and actuators to become faulty simultaneously whenthe NCS works in a poor environment and is affected byexternal disturbance Improving the control performance ofNCS when double-faults occur is important This motivatesus to investigate 119867infin guaranteed cost fault-tolerant controlof double-fault NCS which is a necessary but challengetask
This paper develops a 119867infin guaranteed cost fault-tolerantcontrol for a double-fault NCS to guarantee its stability Thetime-varying properties of sensor faults and actuator faultsare modelled as two time-varying and bounded parametermatrices and the networked control system is built as alinear closed-loop system with transmission delays and datapacket dropouts Different from [30 31] here it is necessaryto deal with two dynamic matrices One of them is locatedat the left hand side of the gain matrix and the other one islocated at the right hand side of the gain matrix This bringschallenges to searching a feasible control gain To solve suchproblem a piecewise delaymethod is proposed to analyse thedelay-dependent faulty system for reducing the conservatismThe delay falling in each subinterval is treated as a caseFor different cases different weighted technology is used toderive the 119867infin guaranteed cost fault-tolerant condition andthe controller parameter for this NCS is obtained by solvingseveral sets of LMIs Compared with [26 32ndash34] the delayconsidered in this paper can be continuously changed withtime
Notation 119877119899 denotes the n-dimensional Euclidean spaceThesuperscript ldquo119879rdquo stands for matrix transpositionThe notation119883 gt 0 means that the matrix 119883 is a real positive definitematrix 119868 is the identity matrix of appropriate dimensions[ 119883 119885lowast 119884 ] denotes a symmetricmatrix wheredenotes the entriesimplied by symmetry
2 Modelling of Double-Fault NCS
The linear control plant of NCS with uncertain parametersand external disturbance can be expressed as
1199091015840 (119905) = (119860 + Δ119860) 119909 (119905) + (119861 + Δ119861) 119906 (119905) + 119867120596 (119905)119910 (119905) = 119862119909 (119905) (1)
where 119909(119905) isin 119877119899 119906(119905) isin 119877119898 119910(119905) isin 119877119903 and 120596(119905) isin1198712[0 infin) isin 119877119899 represent state value input output andexternal disturbance respectively Separately 119860 119861 119867 and119862 are matrices with appropriate dimensions Δ119860 and Δ119861 are
x(t)
xF(t)
uF(t)
Delay sc (t)
Delay ca (t)
S1 S2
Control plant
Network
Actuator
Sensor
Controller
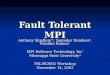
Figure 1 The structure of double-fault NCS
matrices with uncertain time-varying parameters satisfying[Δ119860 Δ119861] = 119863119865(119905)[1198641 1198642] 119865(119905) is an unknown matrixfunction with Legesgue measurable properties satisfying119865119879(119905)119865(119905) le 119868 and 119863 1198641 and 1198642 are constant matrices withappropriate dimensions
For the convenience of the later formulation two con-cepts can be initially introduced
Definition 1 The sensor faults and actuator faults could occursimultaneously that is there may be two types of faults at onetime this kind of fault is called a double-fault
Definition 2 The sensor faults and actuator faults do notoccur simultaneously that is there is only one type of faultat one time this kind of fault is called a single-fault
The structure of a double-fault NCS is shown in Figure 1Transmission delays induced by the network are the sensor-to-controller delay 120591119904119888 and the controller-to-actuator delay120591119888119886 These two delays can be combined when the feedbackcontroller is static The state of the system is assumed tobe completely measurable A piecewise continuous feedbackcontroller which is realized by a zero-order hold (ZOH) isemployed
119906 (119905) = 119870 (119905 minus 120591119888119886) 119905 isin [119905119896 119905119896+1) 119896 = 1 2 sdot sdot sdot (2)
where 119870 is the state feedback gain matrix to be designed and119905119896 is the sampling instantConsidering that sensor faults may occur 119909119865119894 (119905) is used
to represent the data from the 119894-th sensor In this paper weconsider faults that include outage and loss of effectiveness Ifthe 119894-th sensor is an outage the corresponding sampling workis interrupted and the sampling data keeps the default value119909119865119894 (119905) = 0 If the 119894-th sensor loses effectiveness the samplingdata is inaccurate and nonzero We denote the sensor faultmodel as
119909119865119894 (119905) = 119892119894 (119905) 119909119894 (119905) 119894 = 1 2 sdot sdot sdot 119899 (3)
where 119892119894(119905) is the time-varying sensor efficiency factor 119892119894 = 1represents that the 119894-th sensor is normal 119892119894 = 0 representsthat its fault is outage and 0 lt 119892119894 lt 1 or 119892119894 gt 1 representsthat its fault is loss of effectivenessThe upper bound of sensorefficiency factor 119892119894(119905) is denoted by a constant 119892119906119894 satisfying
Mathematical Problems in Engineering 3
119892119906119894 gt 1 while its lower bound is denoted by a constant 119892119897119894satisfying 0 le 119892119897119894 lt 1
Denoting 119909119865(119905) = [1199091198651 (119905) 1199091198652 (119905) sdot sdot sdot 119909119865119899 (119905)]119879 we have119909119865 (119905) = 119866 (119905) 119909 (119905) (4)
where 119866(119905) = diag(1198921(119905) 1198922(119905) sdot sdot sdot 119892119899(119905)) is the sensor faultindicator matrix Correspondingly its upper bound matrix is119866119906 = diag(1198921199061 1198921199062 sdot sdot sdot 119892119906119899) and its lower bound matrix is119866119897 = diag(1198921198971 1198921198972 sdot sdot sdot 119892119897119899)
Data packet dropouts in NCS are also unavoidablebecause of limited bandwidth Considering that data packetdropouts may occur the network is modelled as a switchWhen the switch is located in 1198781 position the data packetcontaining 119909(119905119896) is transmitted and the controller utilizes theupdated data When it is located in the 1198782 position the datapacket dropouts occur and the controller uses the old dataFor a fixed sampling period ℎ the dynamics of the switch canbe expressed as follows
The NCS with no packet dropout at time 119905119896 (119905) = 119866 (119905119896 minus 120591119904119888) 119909 (119905119896 minus 120591119904119888) (5)
The NCS with one packet dropout at time 119905119896 (119905) = 119866 (119905119896 minus 120591119904119888 minus ℎ) 119909 (119905119896 minus 120591119904119888 minus ℎ) (6)
The NCS with 119889119896 isin 119885+ packet dropout at time 119905119896 (119905) = 119866 (119905119896 minus 120591119904119888 minus 119889119896ℎ) 119909 (119905119896 minus 120591119904119888 minus 119889119896ℎ) (7)
Because the feedback controller is static (2) can be expressedas
119906 (119905)= 119870119866 (119905119896 minus 120591119888119886 minus 120591119904119888 minus 119889119896ℎ) 119909 (119905119896 minus 120591119888119886 minus 120591119904119888 minus 119889119896ℎ) (8)
Considering that actuator faults may also occur 119906119865119895 (119905) isused to represent the signal from the 119895-th actuator Similarlywe denote the actuator fault model as
119906119865119894 (119905) = 120575119895 (119905) 119906119895 (119905) 119895 = 1 2 sdot sdot sdot 119898 (9)
where 120575119895(119905) is the time-varying actuator efficiency factor 120575119895 =1 represents that the 119895-th actuator is normal 120575119895 = 0 representsthat its fault is an outage and 0 lt 120575119895 lt 1 or 120575119895 gt 1 denotes thatits fault is a loss of effectiveness The upper bound of sensorefficiency factor 120575119895(119905) is denoted by a constant 120575119906119895 satisfying120575119906119895 gt 1 while its lower bound is denoted by a constant 120575119897119895satisfying 0 le 120575119897119895 lt 1
Denoting the faulty control signal 119906119865(119905) =[1199061198651 (119905) 1199061198652 (119905) sdot sdot sdot 119906119865119898(119905) ]119879 we can obtain the fault-tolerantcontrol law as
119906119865 (119905) = Θ (119905) 119906 (119905) = Θ (119905) 119870119866 (119905119896 minus 120591119888119886 minus 120591119904119888 minus 119889119896ℎ)sdot 119909 (119905119896 minus 120591119888119886 minus 120591119904119888 minus 119889119896ℎ) (10)
whereΘ(119905) = diag(1205751(119905) 1205752(119905) sdot sdot sdot 120575119898(119905)) is the actuator faultindicator matrix Correspondingly its upper bound matrix is
Θ119906 = diag(1205751199061 1205751199062 sdot sdot sdot 120575119906119898) and its lower bound matrix isΘ119897 = diag(1205751198971 1205751198972 sdot sdot sdot 120575119897119898)Let 120578(119905) = 119905 minus 119905119896 + 120591119888119886 + 120591119904119888 + 119889119896ℎ 119905 isin [119905119896 119905119896+1) (10) can
now be expressed as follows
119906119865 (119905) = Θ (119905) 119906 (119905) = Θ (119905) 119870119866 (119905 minus 120578 (119905)) 119909 (119905119896 minus 120578 (119905)) (11)
Obviously the delay part 120578(119905) may vary with time 119905 and itsatisfies
120578119898 le 120578 (119905) = 119905 minus 119905119896 + 120591119888119886 + 120591119904119888 + 119889119896ℎ le 120578119872119905 isin [119905119896 119905119896+1) (12)
From the upper bounds119866119906 Θ119906 of fault indicator matricesand lower bounds 119866119897 Θ119897 of fault indicator matrices thenonsingular mean-value matrices are separately obtained as
1198660 = diag (11989201 11989202 sdot sdot sdot 1198920119899) 1198920119894 = 119892119906119894 + 1198921198971198942Θ0 = diag (12057501 12057502 sdot sdot sdot 1205750119898) 1205750119895 = 120575119906119895 + 1205751198971198952
(13)
Moreover the following two time-varying matrices areintroduced
119871 (119905 minus 120578 (119905))= diag (1198971 (119905 minus 120578 (119905)) 1198972 (119905 minus 120578 (119905)) sdot sdot sdot 119897119899 (119905 minus 120578 (119905)))
119897119894 (120578 (119905)) = 119892119894 (120578 (119905)) minus 11989201198941198920119894Γ (119905) = diag (1205821 (119905) 1205822 (119905) sdot sdot sdot 120582119898 (119905)) 120582119894 (119905) = 120575119895 (119905) minus 12057501198951205750119895
(14)
Obviously we have
minus1 le 119892119897119894 minus 11989201198941198920119894 le 119897119894 (119905 minus 120578 (119905)) = 119892119894 minus 11989201198941198920119894 le 119892119906119894 minus 11989201198941198920119894= 119892119906119894 minus 119892119897119894119892119906119894 + 119892119897119894 le 1 (15)
Similarly we have
minus1 le 120582119895 (119905) le 1 (16)
In expressions from (13) to (16) 119894 and 119895 meet 119894 = 1 2 119899119895 = 1 2 119898 Based on (15) and (16) we have
minus119868119899times119899 le 119871 (119905 minus 120578 (119905)) le 119868119899times119899minus119868119898times119898 le Γ (119905) le 119868119898times119898 (17)
From on (14) the following can be obtained
119892119894 (119905 minus 120578 (119905)) = 1198920119894 (1 + 119897119894 (119905 minus 120578 (119905))) 119894 = 1 2 sdot sdot sdot 119899120575119894 (119905) = 1205750119894 (1 + 120582119894 (119905)) 119895 = 1 2 sdot sdot sdot 119898 (18)
4 Mathematical Problems in Engineering
Naturally the time-varying fault indicator matrices can berewritten as
119866 (119905 minus 120578 (119905)) = 1198660 (119868 + 119871 (119905 minus 120578 (119905))Θ (119905) = Θ0 (119868 + Γ (119905)) (19)
Inserting (19) into (11) we have
119906 (119905)= Θ0 (119868 + Γ (119905)) 1198701198660 (119868 + 119871 (119905 minus 120578 (119905))) 119909 (119905 minus 120578 (119905)) (20)
Then the new model of double-fault NCS can be obtained asfollows
1199091015840 (119905) = (119860 + Δ119860) 119909 (119905) + (119861 + Δ119861) Θ0 (119868 + Γ (119905))sdot 1198701198660 (119868 + 119871 (119905 minus 120578 (119905))) 119909 (119905 minus 120578 (119905)) + 119867120596 (119905)
119910 (119905) = 119862119909 (119905)(21)
Remark 3 The networked control systems in faulty case canbe modelled as system (21) with the effects of time-varyingdelay 120578(119905)whose upper bound and lower bound are describedin (12) Unlike the previousmodels [17 21 27 35] this modelis related to both sensor faults and actuator faults the faultsare time-varying which are reflected by the time-varyingparameters 119871(119905 minus 120578(119905)) and Γ(119905) From (17) we undoubtedlyknow the time-varying parameter 119871(119905 minus 120578(119905)) satisfies 119871119879119871 =1198712 le 119868 while the parameter Γ(119905) satisfies Γ119879Γ = Γ2 le 119868Remark 4 From the descriptions of faults matrices weundoubtedly know if 119897119894 = 11198920119894 minus 1 (119894 = 1 2 sdot sdot sdot 119899) we canobtain 119892119894 = 1 and 1198660(119868 + 119871(119905 minus 120578(119905))) = 119868 and then model (21)is an actuator fault model Similarly if 120582119894 = (120575119895 minus1205750119895)1205750119895 (119895 =1 2 sdot sdot sdot 119898) we can obtain 120575119895 = 1 and Θ0(119868 + Γ(119905)) = 119868 andthen model (21) represents a sensor fault model Thereforemodel (21) of a double-fault NCS contains cases of single-faults and the single-faults are a special formof double-faults
In the following section a fundamental preliminary resultis presented to guarantee the performance of a double-faultNCS based on the delay information
3 Performance Analysis of Double-Fault NCS
For the system model (21) established in Section 2 the costfunction is given as follows
119869 = intinfin0
[119909119879 (119905) 1198781119909 (119905) + 119906119879 (119905) 1198782119906 (119905)] 119889119905= intinfin0
119909119879 (119905) 1198781119909 (119905)+ [Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) 119909 (119905 minus 120578 (119905))]119879sdot 1198782Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) 119909 (119905 minus 120578 (119905)) 119889119905
(22)
where 1198781 and 1198782 are symmetric positive definite matrices
Definition 5 Formodel (21) and its cost function (22) if thereexists a control gain matrix 119870 satisfying the conditions
(1) the closed-loop system is asymptotically stable when120596(119905) = 0(2) for any zero initial condition and any nonzero vector120596(119905) isin 1198712[0 infin) given 120574 gt 0 the output 119910(119905) satisfies119910(119905)2 le 120574120596(119905)2(3) there exists a constant 1198690 and the cost function definedas (22) satisfies 119869infin le 1198690
then matrix 119870 is the 119867infin guaranteed cost control gain ofdouble-faults NCS
To analyse the stability of the system expediently thefollowing lemmas are introduced
Lemma 6 (see [36 37]) For any matrices119882119872119873 119865(119905) withFT119865 le 119868 and any scalar 120576 gt 0 the inequality holds as
119882 + 119872119865 (119905) 119873 + 119873119879119865119879 (119905) 119872119879le 119882 + 120576119872119872119879 + 120576minus1119873119879119873 (23)
Lemma 7 (see [38]) If 1205781 le 120578(119905) le 1205782 for any matrices Π1Π2 and Φ the following inequalities are equivalent(1) [120578(119905) minus 1205781]Π1 + [1205782 minus 120578(119905)]Π2 + Φ lt 0(2) [1205782 minus 1205781]Π1 + Φ lt 0 [1205782 minus 1205781]Π2 + Φ lt 0The fundamental preliminary result is presented in the
following theorem
Theorem 8 Given symmetric positive definite matrices 1198781 and1198782 a set of constant 120578119898 120578119872 1205881 gt 0 1205882 gt 0 and 120572 =(120578119872 minus 120578119898)2 If there exists a set of symmetric positive definitematrices 119877119894 (119894 = 1 2 3) and matrix 119875 gt 0 as well as matrices119872119897120573 1198722120573 119873119897120573 1198732120573 119880120573 (120573 = 1 2 3 4 5 6 7 8) 119870 and a setof constants 120576 gt 0 and 120574 gt 0 satisfying the LMIs
[[[[[[[[[[[[[[[[[
minus120576119868 0 0 0 120576119879lowast minus (1198781 + 119862119879119862)minus1 0 0 lowast lowast minus1198782minus1 0 Σlowast lowast lowast minusΓ119897 Ω119897119896lowast lowast lowast lowast Φ119897lowast lowast lowast lowast lowastlowast lowast lowast lowast lowastlowast lowast lowast lowast lowastlowast lowast lowast lowast lowastlowast lowast lowast lowast lowast
997888rarr
0 0 0 0 00 0 0 0 00 Θ0119870119866 0 Θ0 00 0 0 0 0119879 Θ 0 Δ 119879minus120576119868 1198642Θ01198701198660 0 1198642Θ0 0lowast minus12058811198805 0 0 (1198701198660)119879lowast lowast minus1205881minus11198805minus1 0 0lowast lowast lowast minus1205882119868 0lowast lowast lowast lowast minus1205882minus1119868
]]]]]]]]]]]]]]]]]
lt 0
119897 = 1 2 119896 = 1 2
(24)
where
Mathematical Problems in Engineering 5
Φ1 =
[[[[[[[[[[[[[[[[[[[
minus1198771 + 1198801119860 + (1198801119860)119879 1198771 + (1198802119860)119879 + 11987211 (1198803119860)119879 minus 11987311 (1198804119860)119879lowast minus1198771 + 11987212 + 11987212119879 11987213119879 minus 11987312 11987214119879lowast lowast minus1198773120572 minus 11987312 minus 11987312119879 1198773120572 minus 11987314119879lowast lowast lowast minus1198773120572lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
119875 minus 1198801 + (1198805119860)119879 Ψ1 + (1198806119860)119879 (1198807119860)119879 + (1198808119860)119879 + 1198801119867 0minus1198802 + 11987215119879 Ψ2 + 11987216119879 1198802119867 + 11987217119879 + 11987218119879 0minus1198803 minus 11987315119879 Ψ3 minus 11987316119879 1198803119867 minus 11987317119879 minus 11987318119879 0
minus1198804 Ψ4 1198804119867 012057811989821198771 + 120572 (1198772 + 1198773) minus 1198805 minus 1198805119879 Ψ5 minus 1198806119879 1198805119867 minus 1198807119879 minus 1198808119879 0
lowast Ψ6 Ξ 0lowast lowast 1198807119867 + 1198808119867 + (1198807119867)119879 + (1198808119867)119879 0lowast lowast lowast minus1205742119868
]]]]]]]]]]]]]]]]]]]
Φ2 =
[[[[[[[[[[[[[[[[[[[[
minus1198771 + 1198801119860 + (1198801119860)119879 1198771 + (1198802119860)119879 (1198803119860)119879 + 11987221 (1198804119860)119879 minus 11987321lowast minus1198771 minus 1198772120572 1198772120572 + 11987222 minus11987322lowast lowast minus1198772120572 + 11987223 + 11987223119879 11987224119879 minus 11987323lowast lowast lowast minus11987324 minus 11987324119879lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
119875 minus 1198801 + (1198805119860)119879 Ψ11015840 + (1198806119860)119879 (1198807119860)119879 + (1198808119860)119879 + 1198801119867 0minus1198802 Ψ21015840 1198802119867 0
minus1198803 + 11987225119879 Ψ31015840 + 11987226119879 1198803119867 + 11987227119879 + 11987228119879 0minus1198804 minus 11987325119879 Ψ41015840 minus 11987326119879 1198804119867 minus 11987327119879 minus 11987328119879 0
12057811989821198771 + 120572 (1198772 + 1198773) minus 1198805 minus 1198805119879 Ψ51015840 minus 1198806119879 1198805119867 minus 1198807119879 minus 1198808119879 0lowast Ψ61015840 Ξ1015840 0lowast lowast 1198807119867 + 1198808119867 + (1198807119867)119879 + (1198808119867)119879 0lowast lowast lowast minus1205742119868
]]]]]]]]]]]]]]]]]]]]]
Γ1 = 1205721198772Γ2 = 1205721198773
Ω11 = 1205721198721119879
6 Mathematical Problems in Engineering
Ω12 = 1205721198731119879Ω21 = 1205721198722119879Ω22 = 1205721198732119879
1198721119879 = [11987211119879 11987212119879 11987213119879 11987214119879 11987215119879 11987216119879 11987217119879 11987218119879] 1198722119879 = [11987221119879 11987222119879 11987223119879 11987224119879 11987225119879 11987226119879 11987227119879 11987228119879]
1198731119879 = [11987311119879 11987312119879 11987313119879 11987314119879 11987315119879 11987316119879 11987317119879 11987318119879] 1198732119879 = [11987321119879 11987322119879 11987323119879 11987324119879 11987325119879 11987326119879 11987327119879 11987328119879]
Ξ = (1198807119861Θ01198701198660)119879 + (1198808119861Θ01198701198660)119879 + 1198806119867 minus 11987217119879 minus 11987218119879 + 11987317119879 + 11987318119879Ψ119894 = 119880119894119861Θ01198701198660 + 1198731119894 minus 1198721119894 (119894 = 1 2 3 4 5)
Ψ6 = 1198806119861Θ01198701198660 + (1198806119861Θ01198701198660)119879 minus 11987216 minus 11987216119879 + 11987316 + 11987316119879Ξ1015840 = (1198807119861Θ01198701198660)119879 + (1198808119861Θ01198701198660)119879 + 1198806119867 minus 11987227119879 minus 11987228119879 + 11987327119879 + 11987328119879
Ψ1198941015840 = 119880119894119861Θ01198701198660 + 1198732119894 minus 1198722119894 (119894 = 1 2 3 4 5) Ψ10158406 = 1198806119861Θ01198701198660 + (1198806119861Θ01198701198660) 119879 minus 11987226 minus 11987226119879 + 11987326 + 11987326119879
= [(1198801119863)119879 (1198802119863)119879 (1198803119863)119879 (1198804119863)119879 (1198805119863)119879 (1198806119863)119879 (1198807119863)119879 + (1198808119863)119879 0]119879 = [1198641 0 0 0 0 1198642Θ01198701198660 0 0]
0 = [0 0 0 0 0 119868 0 0]119879 = [119868 0 0 0 0 0 0 0]
Θ = [(1198801119861Θ01198701198660)119879 (1198802119861Θ01198701198660)119879 (1198803119861Θ01198701198660)119879 (1198804119861Θ01198701198660)119879 (1198805119861Θ01198701198660)119879 (1198806119861Θ01198701198660)119879 (11988071198611198701198660)119879 + (11988081198611198701198660)119879 0]119879 Δ = [(1198801119861Θ0)119879 (1198802119861Θ0)119879 (1198803119861Θ0)119879 (1198804119861Θ0)119879 (1198805119861Θ0)119879 (1198806119861Θ0)119879 (1198807119861Θ0)119879 + (1198808119861Θ0)119879 0]119879
= [0 0 0 0 0 1198701198660 0 0] Σ = [0 0 0 0 0 Θ01198701198660 0 0]
(25)
then model (21) is asymptotically stable with the 119867infin normbound 120574 In addition the upper bound 1198690 of cost function 119869 isgiven as
1198690 = 119909119879 (0119905) 119875119909 (0) + 120578119898 int0minus120578119898
int0119904
1199091015840119879 (120591) 11987711199091015840 (120591) 119889119904119889120591+ intminus120578119898minus1205781
int0119904
1199091015840119879 (120591) 11987721199091015840 (120591) 119889119904119889120591+ intminus1205781minus120578119872
int0119904
1199091015840119879 (120591) 11987731199091015840 (120591) 119889119904119889120591
(26)
Proof First with the definition of 120572 = (120578119872 minus 120578119898)2 and 1205781 =120578119898+120572 the interval of delay is distributed into two subintervalsas follows
120578 (119905) isin [120578119898 120578119872] = [120578119898 1205781] cup [1205781 120578119872] (27)
Then we consider the Lyapunov-Krasovskii functional asfollows
V (119905) = 119909119879 (119905) 119875119909 (119905)+ 120578119898 int119905
119905minus120578119898
int119905119904
1199091015840119879 (120591) 11987711199091015840 (120591) 119889119904119889120591+ int119905minus120578119898119905minus1205781
int119905119904
1199091015840119879 (120591) 11987721199091015840 (120591) 119889119904119889120591+ int119905minus1205781119905minus120578119872
int119905119904
1199091015840119879 (120591) 11987731199091015840 (120591) 119889119904119889120591
(28)
where matrix 119875 satisfies 119875 gt 0 and 119877119894 (119894 = 1 2 3)are symmetric positive definite matrices with appropriatedimensions For the convenience of writing we denote 119871 =119871(119905 minus 120578(119905)) and Γ = Γ(119905) in the following expressions
Mathematical Problems in Engineering 7
Calculating the derivative of Lyapunov-Krasovskii functionand based on (21) we have
V1015840 (119905) = 2119909119879 (119905) 1198751199091015840 (119905) + 12057821198981199091015840119879 (119905) 11987711199091015840 (119905)minus 120578119898 int119905
119905minus120578119898
1199091015840119879 (119904) 11987711199091015840 (119904) 119889119904 + (1205781 minus 120578119898) 1199091015840119879 (119905)sdot 11987721199091015840 (119905) minus int119905minus120578119898
119905minus1205781
1199091015840119879 (119904) 11987721199091015840 (119904) 119889119904 + (120578119872 minus 1205781)sdot 1199091015840119879 (119905) 11987731199091015840 (119905) minus int119905minus1205781
119905minus120578119872
1199091015840119879 (119904) 11987731199091015840 (119904) 119889119904+ 2 [120576119879 (119905) 120596119879 (119905)] 119880 [(119860 + Δ119860) 119909 (119905)+ (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) 119909 (119905 minus 120578 (119905))+ 119867120596 (119905) minus 1199091015840 (119905)]
(29)
where V1015840(119905) = lim sup120575997888rarr0+(1120575)[V(119905 + 120575) minus V(119905)] [39]Based on Jessenrsquos inequality we have
minus 120578119898 int119905119905minus120578119898
1199091015840119879 (119904) 11987711199091015840 (119904) 119889119904 le [119909119879 (119905) 119909119879 (119905 minus 120578119898)]sdot [minus1198771 11987711198771 minus1198771] [ 119909 (119905)
119909 (119905 minus 120578119898)](30)
minus int119905minus120578119898119905minus1205781
1199091015840119879 (119904) 11987721199091015840 (119904) 119889119904le 1120572 [119909119879 (119905 minus 120578119898) 119909119879 (119905 minus 1205781)]sdot [minus1198772 11987721198772 minus1198772] [119909 (119905 minus 120578119898)119909 (119905 minus 1205781)]
(31)
minus int119905minus1205781119905minus120578119872
1199091015840119879 (119904) 11987731199091015840 (119904) 119889119904le 1120572 [119909119879 (119905 minus 1205781) 119909119879 (119905 minus 120578119872)]sdot [minus1198773 11987731198773 minus1198773] [ 119909 (119905 minus 1205781)119909 (119905 minus 120578119872)]
(32)
where 120572 = (120578119872 minus 120578119898)2 For the convenience of the followingdiscussion we define
120576119879 (119905) = [119909119879 (119905) 119909119879 (119905 minus 120578119898) 119909119879 (119905 minus 1205781) 119909119879 (119905 minus 120578119872)sdot 1199091015840119879 (119905) 119909119879 (119905 minus 120578 (119905)) 120596119879 (119905)] (33)
Case 1 If 120578(119905) isin [120578119898 1205781] weighted technology based on theprinciple of Newton-Leibniz is introduced as follows
2 [120576119879 (119905) 120596119879 (119905)] 1198721 [119909 (119905 minus 120578119898) minus 119909 (119905 minus 120578 (119905))minus int119905minus120578119898119905minus120578(119905)
1199091015840119879 (119904) 119889119904] = 0(34)
and
2 [120576119879 (119905) 120596119879 (119905)] 1198731 [119909 (119905 minus 120578 (119905)) minus 119909 (119905 minus 1205781)minus int119905minus120578(119905)119905minus1205781
1199091015840119879 (119904) 119889119904] = 0(35)
Because 1198772 gt 0 we haveminus 2 [120576119879 (119905) 120596119879 (119905)] 1198721 int119905minus120578119898
119905minus120578(119905)1199091015840 (119904) 119889119904 le (120578 (119905) minus 120578119898)
sdot [120576119879 (119905) 120596119879 (119905)] 1198721119877minus12 1198721119879 [120576119879 (119905) 120596119879 (119905)]119879+ int119905minus120578119898119905minus120578(119905)
1199091015840119879 (119904) 11987721199091015840 (119904) 119889119904(36)
and
minus 2 [120576119879 (119905) 120596119879 (119905)] 1198731 int119905minus120578(119905)119905minus1205781
1199091015840 (119904) 119889119904 le (1205781 minus 120578 (119905))sdot [120576119879 (119905) 120596119879 (119905)] 1198731119877minus12 1198731119879 [120576119879 (119905) 120596119879 (119905)]119879+ int119905minus120578(119905)119905minus1205781
1199091015840119879 (119904) 11987721199091015840 (119904) 119889119904(37)
Therefore
minus 2 [120576119879 (119905) 120596119879 (119905)] 1198721 int119905minus120578119898119905minus120578(119905)
1199091015840 (119904) 119889119904minus 2 [120576119879 (119905) 120596119879 (119905)] 1198731 int119905minus120578(119905)
119905minus1205781
1199091015840 (119904) 119889119904le (120578 (119905) minus 120578119898)sdot [120576119879 (119905) 120596119879 (119905)] 1198721119877minus12 1198721119879 [120576119879 (119905) 120596119879 (119905)]119879+ (1205781 minus 120578 (119905))sdot [120576119879 (119905) 120596119879 (119905)] 1198731119877minus12 1198731119879 [120576119879 (119905) 120596119879 (119905)]119879+ int119905minus120578119898119905minus1205781
1199091015840119879 (119904) 11987721199091015840 (119904) 119889119904
(38)
In addition 119910119879(119905)119910(119905)minus1205742120596119879(119905)120596(119905) both on the left and rightsides of equality (29) and 119909119879(119905)1198781119909(119905) + [Θ0(119868 + Γ)1198701198660(119868 +119871)119909(119905 minus 120578(119905))]1198791198782Θ0(119868 + Γ)1198701198660(119868 + 119871)119909(119905 minus 120578(119905)) on the rightof the equal sign ldquo=rdquo and then inserting (30) (32) (34) (35)(38) to the obtained inequality we have
V1015840 (119905) + 119910119879 (119905) 119910 (119905) minus 1205742120596119879 (119905) 120596 (119905)le [120576119879 (119905) 120596119879 (119905)] Φ1 [120576119879 (119905) 120596119879 (119905)]119879+ (120578 (119905) minus 120578119898)sdot [120576119879 (119905) 120596119879 (119905)] 1198721119877minus12 1198721119879 [120576119879 (119905) 120596119879 (119905)]119879+ (1205781 minus 120578 (119905))sdot [120576119879 (119905) 120596119879 (119905)] 1198731119877minus12 1198731119879 [120576119879 (119905) 120596119879 (119905)]119879
(39)
where
8 Mathematical Problems in Engineering
Φ1 =
[[[[[[[[[[[[[[[[[[[[
Ξ1 1198771 + [1198802 (119860 + Δ119860)]119879 + 11987211 [1198803 (119860 + Δ119860)]119879 minus 11987311 [1198804 (119860 + Δ119860)]119879lowast minus1198771 + 11987212 + 11987212119879 11987213119879 minus 11987312 11987214119879lowast lowast minus1198773120572 minus 11987312 minus 11987312119879 1198773120572 minus 11987314119879lowast lowast lowast minus1198773120572lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
119875 minus 1198801 + [1198805 (119860 + Δ119860)]119879 Ψ1 + [1198806 (119860 + Δ119860)]119879 [1198807 (119860 + Δ119860)]119879 + [1198808 (119860 + Δ119860)]119879 + 1198801119867 0minus1198802 + 11987215119879 Ψ2 + 11987216119879 1198802119867 + 11987217119879 + 11987218119879 0minus1198803 minus 11987315119879 Ψ3 minus 11987316119879 1198803119867 minus 11987317119879 minus 11987318119879 0
minus1198804 Ψ4 1198804119867 012057811989821198771 + 120572 (1198772 + 1198773) minus 1198805 minus 1198805119879 Ψ5 minus 1198806119879 1198805119867 minus 1198807119879 minus 1198808119879 0
lowast Ψ6 Ξ2 0lowast lowast 1198807119867 + 1198808119867 + (1198807119867)119879 + (1198808119867)119879 0lowast lowast lowast minus1205742119868
]]]]]]]]]]]]]]]]]]]
Ξ1 = minus1198771 + 1198801 (119860 + Δ119860) + [1198801 (119860 + Δ119860)]119879 + 119862119879119862 + 1198781Ξ2 = [1198807 (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 + [1198808 (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 + 1198806119867 minus 11987217119879 minus 11987218119879 + 11987317119879
+ 11987318119879Ψ119894 = 119880119894 (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) + 1198731119894 minus 1198721119894 (119894 = 1 2 3 4 5) Ψ6 = 1198806 (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)
+ [1198806 (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 [Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 1198782Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) minus 11987216 minus 11987216119879 + 11987316+ 11987316119879
(40)
ifΦ1 + (120578 (119905) minus 120578119898) 1198721119877minus12 1198721119879
+ (1205781 minus 120578 (119905)) 1198731119877minus12 1198731119879 lt 0 (41)
Next we need to acquire the inequality (24) through atransformation based on inequality (41) which is equivalentto the following inequalities by applying the theory given inLemma 7 and the Schur complement also used byD Yue [38]in the previous study
[minus (1205781 minus 120578119898)minus1 1198772 1198721119879lowast Φ1 ] lt 0 (42)
[minus (1205781 minus 120578119898)minus1 1198772 1198731119879lowast Φ1 ] lt 0 (43)
Premultiplying and postmultiplying the inequalities above bydiag((1205781 minus 120578119898)119868 119868) we have
[minus1205721198772 Ω1119896lowast Φ1 ] lt 0 (44)
Applying the theory of the Schur complement to inequality(44) we have
[[[[[[[
minus (1198781 + 119862119879119862)minus1 0 0 lowast minus1198782minus1 0 Σlowast lowast minus1205721198772 Ω1119896lowast lowast lowast Φ10158401
]]]]]]]
lt 0 (45)
where
Mathematical Problems in Engineering 9
Φ11015840 =
[[[[[[[[[[[[[[[[[[[[
Ξ11015840 1198771 + [1198802 (119860 + Δ119860)]119879 + 11987211 [1198803 (119860 + Δ119860)]119879 minus 11987311 [1198804 (119860 + Δ119860)]119879lowast minus1198771 + 11987212 + 11987212119879 11987213119879 minus 11987312 11987214119879lowast lowast minus1198773120572 minus 11987312 minus 11987312119879 1198773120572 minus 11987314119879lowast lowast lowast minus1198773120572lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
119875 minus 1198801 + [1198805 (119860 + Δ119860)]119879 Ψ1 + [1198806 (119860 + Δ119860)]119879 [1198807 (119860 + Δ119860)]119879 + [1198808 (119860 + Δ119860)]119879 + 1198801119867 0minus1198802 + 11987215119879 Ψ2 + 11987216119879 1198802119867 + 11987217119879 + 11987218119879 0minus1198803 minus 11987315119879 Ψ3 minus 11987316119879 1198803119867 minus 11987317119879 minus 11987318119879 0minus1198804 Ψ4 1198804119867 0
12057811989821198771 + 120572 (1198772 + 1198773) minus 1198805 minus 1198805119879 Ψ5 minus 1198806119879 1198805119867 minus 1198807119879 minus 1198808119879 0lowast Ψ61015840 Ξ2 0lowast lowast 1198807119867 + 1198808119867 + (1198807119867)119879 + (1198808119867)119879 0lowast lowast lowast minus1205742119868
]]]]]]]]]]]]]]]]
Ξ11015840 = minus1198771 + 1198801 (119860 + Δ119860) + [1198801 (119860 + Δ119860)]119879Ψ61015840 = 1198806 (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) + [1198806 (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 minus 11987216 minus 11987216119879 + 11987316 + 11987316119879
Σ = [0 0 0 0 0 Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) 0 0]
(46)
Inequality (44) can be written as
[[[[[
minus (1198781 + 119862119879119862)minus1 0 0 lowast minus1198782minus1 0 Σlowast lowast minus1205721198772 Ω1119896lowast lowast lowast Φ101584010158401]]]]]
+ [[[[
000119863]]]]
119865 [[[[
000119864119879
]]]]
119879
+ [[[[
000119864119879
]]]]
119865119879[[[[[
000
]]]]]
119879
lt 0(47)
where
Φ110158401015840 =
[[[[[[[[[[[[[[[[[[[[
minus1198771 + 1198801119860 + (1198801119860)119879 1198771 + (1198802119860)119879 + 11987211 (1198803119860)119879 minus 11987311 (1198804119860)119879lowast minus1198771 + 11987212 + 11987212119879 11987213119879 minus 11987312 11987214119879lowast lowast minus1198773120572 minus 11987312 minus 11987312119879 1198773120572 minus 11987314119879lowast lowast lowast minus1198773120572lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
10 Mathematical Problems in Engineering
119875 minus 1198801 + (1198805119860)119879 Ψ110158401015840 + (1198806119860)119879 (1198807119860)119879 + (1198808119860)119879 + 1198801119867 0minus1198802 + 11987215119879 Ψ210158401015840 + 11987216119879 1198802119867 + 11987217119879 + 11987218119879 0minus1198803 minus 11987315119879 Ψ310158401015840 minus 11987316119879 1198803119867 minus 11987317119879 minus 11987318119879 0
minus1198804 Ψ41015840 1198804119867 012057811989821198771 + 120572 (1198772 + 1198773) minus 1198805 minus 1198805119879 Ψ510158401015840 minus 1198806119879 1198805119867 minus 1198807119879 minus 1198808119879 0
lowast Ψ610158401015840 Ξ210158401015840 0lowast lowast 1198807119867 + 1198808119867 + (1198807119867)119879 + (1198808119867)119879 0lowast lowast lowast minus1205742119868
]]]]]]]]]]]]]]]]]]]
Ξ210158401015840 = [1198807119861Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 + [1198808119861Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 + 1198806119867 minus 11987217119879 minus 11987218119879 + 11987317119879 + 11987318119879Ψ11989410158401015840 = 119880119894119861Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) + 1198731119894 minus 1198721119894 (119894 = 1 2 3 4 5)
Ψ61015840 = 1198806119861Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) + [1198806119861Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 minus 11987216 minus 11987216119879 + 11987316 + 11987316119879 = [1198641 0 0 0 0 1198642Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) 0 0]
(48)
With the definition of scalar 120576 gt 0 we apply the theory givenin Lemma 6 to (47) also used by Y Wang and L Xie [37]in which the uncertain matrix 119865 can be eliminated and asufficient condition of (47) is obtained
[[[[[[[
minus (1198781 + 119862119879119862)minus1 0 0 lowast minus1198782minus1 0 Σlowast lowast minus1205721198772 Ω1119896lowast lowast lowast Φ101584010158401
]]]]]]]
+ 120576 [[[[[[
01198630
]]]]]]
[[[[[[
01198630
]]]]]]
119879
+ 120576minus1[[[[[[[
000
119879
]]]]]]]
[[[[[[[
000
119879
]]]]]]]
119879
lt 0
(49)
Applying the Schur complement to inequality (49) we have
[[[[[[[[[[[[[[
minus120576119868 0 0 0 120576119879 0lowast minus (1198781 + 119862119879119862)minus1 0 0 0lowast lowast minus1198782minus1 0 Σ 0lowast lowast lowast minus1205721198772 Ω1119896 0lowast lowast lowast lowast Φ101584010158401 119879lowast lowast lowast lowast lowast minus120576119868
]]]]]]]]]]]]]]
lt 0
(50)
There exists 1205881 gt 0 1205882 gt 0 Based on (17) and Remark 3 inSection 2 we know that 119871119879119871 le 119868 and Γ119879Γ le 119868 According
to expressions (47) (49) and (50) we obviously know that1198805 gt 0 Using Lemma 6 again we have
Θ0 (119868 + Γ) 1198701198660119871 + [Θ0 (119868 + Γ) 1198701198660119871]119879le 1205881minus1Θ0 (119868 + Γ) 11987011986601198805minus1 [Θ0 (119868 + Γ) 1198701198660]119879
+ 12058811198805(51)
and
Θ0Γ1198701198660 + (Θ0Γ1198701198660)119879le 1205882minus1Θ0Θ0119879 + 1205882 (1198701198660)1198791198701198660
(52)
Based on inequalities (51) (52) and the Schur complementwe know inequality (24) is a sufficient condition of inequality(50) while inequality (50) is equivalent to inequality (41)Therefore we can undoubtedly obtain inequality (24) asa sufficient condition of inequality (41) Thus based oninequality (39) and (41) we know(1) if120596(119905) equiv 0 obviously we have V1015840(119905) lt 0 so system (21)is asymptotically stable(2) if 119909(0) equiv 0 we know V(0) = 0 In addition it can beobtained that V(infin) ge 0
Therefore
intinfin0
V1015840 (119905) + 119910119879 (119905) 119910 (119905) minus 1205742120596119879 (119905) 120596 (119905) 119889119905= V (infin) + intinfin
0119910119879 (119905) 119910 (119905) minus 1205742120596119879 (119905) 120596 (119905) 119889119905 lt 0
(53)
Thus
intinfin0
119910119879 (119905) 119910 (119905) lt intinfin0
1205742120596119879 (119905) 120596 (119905) 119889119905 (54)
Mathematical Problems in Engineering 11
Because 120596(119905) isin 1198712[0 infin) we have1003817100381710038171003817119910 (119905)1003817100381710038171003817 le 120574 120596 (119905)119879 (55)
It is known that model (21) is asymptotically stable with the119867infin norm bound 120574Moreover according to (39) and (41) we have
V1015840 (119905) le minus119909119879 (119905) 1198781119909 (119905)minus [Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) 119909 (119905 minus 120578 (119905))]119879
sdot 1198782Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) 119909 (119905 minus 120578 (119905))(56)
Through the integral operation it can be determined that119869 le V(0) In addition by inserting 119905 = 0 into the Lyapunov-Krasovskii function shown as expression (28) the upperbound of cost function 119869 can be obtained and shown asexpression (26) Therefore the theorem is verified if 119897 = 1Case 2 If 120578(119905) isin [1205781 120578119872] weighted technology based on theprinciple of Newton-Leibniz is introduced as follows
2 [120576119879 (119905) 120596119879 (119905)] 1198722 [119909 (119905 minus 1205781) minus 119909 (119905 minus 120578 (119905))minus int119905minus1205781119905minus120578(119905)
1199091015840119879 (119904) 119889119904] = 0(57)
2 [120576119879 (119905) 120596119879 (119905)] 1198732 [119909 (119905 minus 120578 (119905)) minus 119909 (119905 minus 120578119872)minus int119905minus120578(119905)119905minus120578119872
1199091015840119879 (119904) 119889119904] = 0(58)
Because 1198773 gt 0 we have
minus 2 [120576119879 (119905) 120596119879 (119905)] 1198722 int119905minus1205781119905minus120578(119905)
1199091015840 (119904) 119889119904 le (120578 (119905) minus 1205781)sdot [120576119879 (119905) 120596119879 (119905)] 1198722119877minus13 1198722119879 [120576119879 (119905) 120596119879 (119905)]119879+ int119905minus1205781119905minus120578(119905)
1199091015840119879 (119904) 11987731199091015840 (119904) 119889119904(59)
minus 2 [120576119879 (119905) 120596119879 (119905)] 1198732 int119905minus120578(119905)119905minus120578119872
1199091015840 (119904) 119889119904 le (120578119872 minus 120578 (119905))sdot [120576119879 (119905) 120596119879 (119905)] 1198732119877minus13 1198731119879 [120576119879 (119905) 120596119879 (119905)]119879+ int119905minus120578(119905)119905minus120578119872
1199091015840119879 (119904) 11987731199091015840 (119904) 119889119904(60)
Therefore
minus 2 [120576119879 (119905) 120596119879 (119905)] 1198722 int119905minus1205781119905minus120578(119905)
1199091015840 (119904) 119889119904
minus 2 [120576119879 (119905) 120596119879 (119905)] 1198732 int119905minus120578(119905)119905minus120578119872
1199091015840 (119904) 119889119904le (120578 (119905) minus 1205781)sdot [120576119879 (119905) 120596119879 (119905)] 1198722119877minus13 1198722119879 [120576119879 (119905) 120596119879 (119905)]119879+ (120578119872 minus 120578 (119905))sdot [120576119879 (119905) 120596119879 (119905)] 1198732119877minus13 1198732119879 [120576119879 (119905) 120596119879 (119905)]119879
+ int119905minus1205781119905minus120578119872
1199091015840119879 (119904) 11987731199091015840 (119904) 119889119904
(61)
In addition 119910119879(119905)119910(119905)minus1205742120596119879(119905)120596(119905) both on the left and rightsides of equality (29) and 119909119879(119905)1198781119909(119905) + [Θ0(119868 + Γ)1198701198660(119868 +119871)119909(119905minus120578(119905))]1198791198782Θ0(119868+Γ)1198701198660(119868+119871)119909(119905minus120578(119905)) on the right sideof equal sign ldquo=rdquo By inserting (30) (31) (57) (58) and (61)into the obtained inequality the item minus int119905minus1205781
119905minus1205781198721199091015840119879(119904)11987731199091015840(119904)119889119904
can be offset while the item minus int119905minus120578119898119905minus1205781
1199091015840119879(119904)11987721199091015840(119904)119889119904 is offsetin Case 1 Then in the same methods of transformation asCase 1 the inequality (24) when 119897 = 2 can be obtainedTherefore the proof is complete
Remark 9 In the two different cases a variational weightingmatrix and Jessenrsquos inequalities are used to derive the 119867infinguaranteed cost fault-tolerant condition of the system inwhich more delay information is employed to reduce theconservatism
The next section will provide sufficient conditions fordesigning the guaranteed cost fault-tolerant control for adouble-fault NCS
4 Guaranteed Cost Fault-Tolerant Control ofDouble-Fault NCS
Inequality (24) is not linear with respect to the gain matricesof the controller so it is needs to be reformulated into LMIsvia a change of variables
Theorem 10 Given symmetric positive definite matrices 1198781and 1198782 a set of constant 120578119898 120578119872 1205881 gt 0 1205882 gt 0 120582119894 (119894 = from1 to 7) and 120572 = (120578119872 minus 120578119898)2 If there exists a set of symmetricpositive definite matrices 119895 (119895 = 1 2 3)119883 andmatrix gt 0as well as matrices 1120573 2120573 1120573 2120573 (120573 =from 1 to 8)
12 Mathematical Problems in Engineering
119884 and a set of constants 120576 gt 0 and 120583 gt 0 satisfying theLMIs
[[[[[[[[[[[[[[[[[[[[[[[[[[
minus120576119868 0 0 0 120576119863119879lowast minus (1198781 + 119862119879119862)minus1 0 0 Πlowast lowast minus1198782minus1 0 Σlowast lowast lowast minusΓ119897 Ω119897119896lowast lowast lowast lowast Φ119897lowast lowast lowast lowast lowastlowast lowast lowast lowast lowastlowast lowast lowast lowast lowastlowast lowast lowast lowast lowastlowast lowast lowast lowast lowast
0 0 0 0 00 0 0 0 00 Θ0119884 0 Θ0 00 0 0 0 0
119864119879 Θ 119883 Δ 119884119879minus120576119868 1198642Θ0119884 0 1198642Θ0 0lowast minus1205881119883119879 0 0 119884119879lowast lowast minus1205881minus1119883 0 0lowast lowast lowast minus1205882119868 0lowast lowast lowast lowast minus1205882minus1119868
]]]]]]]]]]]]]]]]]]]]]]
lt 0
119897 = 1 2 119896 = 1 2(62)
where
Φ1 =
[[[[[[[[[[[[[[[[[[[[[
minus1 + 1205821119860119883119879 + 1205821119883119860119879 1 + 1205822119883119860119879 + 11 1205823119883119860119879 minus 11 1205824119883119860119879lowast minus1 + 12 + 12119879 13119879 minus 12 14119879lowast lowast minus3120572 minus 12 minus 12119879 3120572 minus 14119879lowast lowast lowast minus3120572lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
minus 1205821119883119879 + 119883119860119879 Ψ1 + 1205825119883119860119879 1205826119883119860119879 + 1205827119883119860119879 + 1205821119867119883119879 0minus1205822119883119879 + 15119879 Ψ2 + 16119879 1205822119867119883119879 + 17119879 + 18119879 0minus1205823119883119879 minus 15119879 Ψ3 minus 16119879 1205823119867119883119879 minus 17119879 minus 18119879 0
minus1205824119883119879 Ψ4 1205824119867119883119879 012057811989821 + 120572 (2 + 3) minus 119883119879 minus 119883 Ψ5 minus 1205825119883 119867119883119879 minus 1205826119883 minus 1205827119883 0
lowast Ψ6 Ξ 0lowast lowast 1205826119867119883119879 + 1205827119867119883119879 + 1205826119883119867119879 + 1205827119883119867119879 0lowast lowast lowast minus120583119868
]]]]]]]]]]]]]]]]]
Φ2 =
[[[[[[[[[[[[[[[[[[[[[
minus1 + 1205821119860119883119879 + 1205821119883119860119879 1 + 1205822119883119860119879 1205823119883119860119879 + 21 1205824119883119860119879 minus 21lowast minus1 minus 2120572 2120572 + 22 minus22lowast lowast minus2120572 + 23 + 23119879 24119879 minus 23lowast lowast lowast minus24 minus 24119879lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
Mathematical Problems in Engineering 13
minus 1205821119883119879 + 119883119860119879 Ψ11015840 + 1205825119883119860119879 1205826119883119860119879 + 1205827119883119860119879 + 1205821119867119883119879 0minus1205822119883119879 Ψ21015840 1205822119867119883119879 0
minus1205823119883119879 + 25119879 Ψ31015840 + 26119879 1205823119867119883119879 + 27119879 + 28119879 0minus1205824119883119879 minus 25119879 Ψ41015840 minus 26119879 1205824119867119883119879 minus 27119879 minus 28119879 0
12057811989821 + 120572 (2 + 3) minus 119883 minus 119883119879 Ψ51015840 minus 1205825119883 119867119883119879 minus 1205826119883 minus 1205827119883 0lowast Ψ61015840 Ξ1015840 0lowast lowast 1205826119867119883119879 + 1205827119867119883119879 + 1205826119883119867119879 + 1205827119883119867119879 0lowast lowast lowast minus120583119868
]]]]]]]]]]]]]]]]]]]]]
Γ1 = 1205721198772Γ1 = 1205722Γ2 = 1205723
Ω11 = 1205721119879Ω12 = 1205721119879Ω21 = 1205722119879Ω22 = 1205722119879
1119879 = [11119879 12119879 13119879 14119879 15119879 16119879 17119879 18119879] 2119879 = [21119879 22119879 23119879 24119879 25119879 26119879 27119879 28119879]
1119879 = [11119879 12119879 13119879 14119879 15119879 16119879 17119879 18119879] 1198732119879 = [21119879 22119879 23119879 24119879 25119879 26119879 27119879 28119879]
Ξ = 1205826 (119861Θ0119884)119879 + 1205827 (119861Θ0119884)119879 + 1205825119867119883119879 minus 17119879 minus 18119879 + 17119879 + 18119879Ψ119894 = 120582119894119861Θ0119884 + 1119894 minus 1119894 (119894 = 1 2 3 4)
Ψ5 = 119861Θ0119884 + 1119894 minus 1119894Ψ6 = 1205825119861Θ0119884 + 1205825 (119861Θ0119884)119879 minus 11987216 minus 11987216119879 + 11987316 + 11987316119879
Ξ1015840 = 1205826 (119861Θ0119884)119879 + 1205827 (119861Θ0119884)119879 + 1205825119867119883119879 minus 27119879 minus 28119879 + 27119879 + 28119879Ψ1198941015840 = 120582119894119861Θ0119884 + 2119894 minus 2119894 (119894 = 1 2 3 4)
Ψ51015840 = 119861Θ0119884 + 2119894 minus 2119894Ψ61015840 = 1205825119861Θ0119884 + 1205825 (119861Θ0119884)119879 minus 26 minus 26119879 + 26 + 26119879
119863 = [1205821119863119879 1205822119863119879 1205823119863119879 1205824119863119879 119863119879 1205825119863119879 1205826119863119879 + 1205827119863119879 0]119879 119864 = [1198641119883119879 0 0 0 0 1198642Θ0119884 0 0]
119883 = [0 0 0 0 0 119883119879 0 0]119879 Π = [119883119879 0 0 0 0 0 0 0]
14 Mathematical Problems in Engineering
Θ = [(1205821119861Θ0119884)119879 (1205822119861Θ0119884)119879 (1205823119861Θ0119884)119879 (1205824119861Θ0119884)119879 (119861Θ0119884)119879 (1205825119861Θ0119884)119879 (1205826119861119884)119879 + (1205827119861119884)119879 0]119879 Δ = [(1205821119861Θ0)119879 (1205822119861Θ0)119879 (1205823119861Θ0)119879 (1205824119861Θ0)119879 (119861Θ0)119879 (1205825119861Θ0)119879 (1205826119861Θ0)119879 + (1205827119861Θ0)119879 0]119879
119884 = [0 0 0 0 0 119884 0 0] Σ = [0 0 0 0 0 Θ0119884 0 0]
(63)
then the 119867infin guaranteed cost control gain 119870 = 119884119883minus1198791198660minus1 canrendermodel (21) to be asymptotically stable with the119867infin normbound 120574 = radic120583 13e upper bound 1198690 of cost function 119869 is givenas
1198690 = 119909119879 (0) 119883minus1119883minus119879119909 (0)+ 120578119898 int0
minus120578119898
int0119904
1199091015840119879 (120591) 119883minus11119883minus1198791199091015840 (120591) 119889119904119889120591+ intminus120578119898minus1205781
int0119904
1199091015840119879 (120591) 119883minus12119883minus1198791199091015840 (120591) 119889119904119889120591+ intminus1205781minus120578119872
int0119904
1199091015840119879 (120591) 119883minus13119883minus1198791199091015840 (120591) 119889119904119889120591
(64)
Proof The proof is based on a suitable transformation anda change of variables allowing us to obtain inequality (24)in Theorem 8 First we define 1198805 = 1198800 119880119894 = 1205821198941198800 (119894 =from 1 to 4) 1198806 = 12058251198800 in (24) Because we consider thedimension of state119909is equal to that of outside disturbance120596 in this paper we can also define 1198807 = 12058261198800 1198808 =12058271198800 Obviously (24) implies 1198805 gt 0 so 1198800 is nonsingularThen using the analysis method of D Yue [40] and Z Wang[41] pre- and postmultiplying both sides of inequality (24)with diag(119868 119868 119868 119883 119868 119883 119868 119868 119868) and its transpose where = diag(119883 119883 119883 119883 119883 119883 119883 119883) and 119883 = 1198800minus1 introducingnew variables 119883119875119883119879 = 119883119877119895119883119879 = 119895 (119895 = 1 2 3)119883119872119897120573119883119879 = 119897120573 119883119873119897120573119883119879 = 119897120573 (119897 = 1 2 120573 = 1 2 sdot sdot sdot 8)1198701198660119883119879 = 119884 and 120583 = 1205742 From the definition of 1198660 we know1198660 is invertible so 119870 can be obtained by calculating 119870 =119884119883minus1198791198660minus1 It is easy to see that 10 and (64) respectively imply(24) and (26) Therefore from Theorem 8 we can completethe proof
To obtain the optimal bound 119869lowast shown in (26) thecommonly used method is to consider it as an optimizationproblem like [42] in which the expression of initial state 119909(119905)(119905 isin [minus120578119872 0]) needs to be known The expression of initialstate is not given in this paper Therefore the optimizationmethod used in [42] cannot be used here A practical methodto obtain 119869lowast also used by D Yue [43] is employed as follows
Suppose 1199091015840(119905) is bounded if 119905 isin [minus120578119872 0] and satisfying1199091015840119879(120591)1199091015840(120591) le ℓ In addition suppose that there exists 120573119894 gt0 (119894 = 1 2 3) satisfying119883minus1119894119883minus119879 le 120573119894119868 119894 = 1 2 3119883minus1119883minus119879 le 1205734119868 (65)
Inserting this into (64) we have
1198690 le 1205734119909119879 (0) 119909 (0) + 05ℓ12057311205781198983 + 05ℓ1205732 (12057812 minus 1205781198982)+ 05ℓ1205733 (1205781198722 minus 12057812) = 119869lowast (66)
Applying the Schur complement to the inequalities above wehave
[minus120573119894119868 119883minus1lowast minus119877119894minus1] lt 0 119894 = 1 2 3
[minus1205734119868 119883minus1lowast minus119875minus1] lt 0
(67)
Then combining 10 and (67) 119894minus1 119894 (119894 = 1 2 3)minus1 119883minus1 119883 exist simultaneously We cannot directly usethe LMI tools to solve the problem Defining 119894minus1 = 119894(119894 = 1 2 3) minus1 = 119883minus1 = and using the idea of thecone complementary linearization algorithm the guaranteedcost fault-tolerant controller of system (21) and the value ofoptimal performance indicator 119869lowast can be obtained in thefollowing method
Minimize 119905119903119886119888119890 (11 + 22 + 33 + + )+ 1205734 + 0512057311205781198983 + 051205732 (12057812 minus 1205781198982)+ 051205733 (1205781198722 minus 12057812)
Subject to 119868119899119890119902119906119886119897119894119905119894119890119904 (62) [minus120573119894119868
lowast minus119894] lt 0 (119894 = 1 2 3)
[minus1205734119868 lowast minus] lt 0
[119883 119868lowast ] ge 0
[1 119868lowast 1] ge 0
[2 119868lowast 2] ge 0
Mathematical Problems in Engineering 15
[3 119868lowast 3] ge 0
[ 119868lowast ] ge 0
119894 gt 0 (119894 = 1 2 3) (68)
5 Simulations
Example 11 Consider inverted pendulum model that canusually be modelled as (1) and the system parameters aregiven as follows
119860 = [minus2 1110 4 ]
119861 = [01minus4]
119862 = [minus03151 01011 03]
119867 = [015 minus056minus01 032 ]
Δ119860 = [004 sin 119905 015 sin 119905minus02 sin 119905 075 sin 119905]
Δ119861 = [002 sin 119905minus01 sin 119905]
119863 = [ 01minus05]
119865 (119905) = sin 119905
(69)
Therefore we have
1198641 = [04 15] 1198642 = 02 (70)
For this simulation the initial state of system is assumed119909(0) = [2 minus1]119879 and the external disturbance is considered as120596(119905) = [015 minus05]119879 3119904 le 119905 le 4119904
0 119900119905ℎ119890119903119904 Here we take the upper
bound of time-varying delay as 120578119872 = 03119904 and its lower boundas 120578119898 = 0119904 namely 0 le 120578(119905) le 03 In addition the faultbounds of the system are given in Table 1
Table 1 The bounds of faults
Symbol Upper bound Lower boundActuatorfaultsΘ 136 009
SensorFaults119866
[[
165 00 175]
][[
0 00 015]
]
minus01
0
01
02
03
04
05
Del
ay
1 2 3 4 5 60Time s
Figure 2 The time-varying delay in double-fault NCS
We choose the parameters as follows
1205821 = 011205822 = 0151205823 = minus0641205824 = 031205825 = 1205826 = 0351205827 = 181198782 = 0311205881 = 30001205882 = 22032ℓ = 1
1198781 = [10013 00 9207]
(71)
By taking advantage of the LMI tool box and inserting theabove parameters into inequalities 10 and (68) we can obtainthe 119867infin guaranteed cost control gain
119870 = 119884119883minus1198791198660minus1 = [85163 151398] (72)
with 120574 = radic120583 = 1952516The corresponding optimal performance indicator (the
upper bound value of guaranteed cost function) is 119869lowast =83162563The time-varying delay is shown in Figure 2 In Figure 3
(a) is the actuator fault which is a piecewise-linear function
16 Mathematical Problems in Engineering
002040608
1121416
Actu
ator
faul
t
1 2 3 4 5 60Time s
(a) Time-varying actuator fault
minus020
02040608
112141618
Sens
or fa
ult
1 2 3 4 5 60Time s
(b) Time-varying sensor fault
Figure 3 The time-varying faults
x1
x2
1 2 3 4 5 60Time s
minus15
minus1
minus05
0
05
1
15
2
Stat
e X
Figure 4 The state response curve of double-fault NCS
1 2 3 4 5 60Time s
minus8minus7minus6minus5minus4minus3minus2minus1
012
Con
trol i
nput
Figure 5 The control input of double-fault NCS
It keeps the minimum value from 13119904 to 17119904 while it keepsthe maximum value from 37119904 to 43119904 The sensor faults areshown as (b) which is sinusoidal It should be noted thatthe green dotted line represents the fault of sensor 1 whilethe blue solid line represents the fault of sensor 2 Throughthe state response of the double-fault NCS shown in Figure 4and corresponding control signal shown in Figure 5 we know
x1
x2
1 2 3 4 5 60Time s
minus8
minus6
minus4
minus2
0
2
4
6
Stat
e X
Figure 6 The state response curve of double-fault NCS
the 119867infin guaranteed cost controller designed in this paper isable to make the double-fault NCS asymptotically stable Thesystem gets preliminarily steady at 2119904 and its state can returnto the equilibrium position in a certain period of time whenthe NCS is affected by external disturbance Compared withthe state response of worse stability shown in Figure 6 whenthe method proposed in [28] is used for this double-faultproblem it sufficiently proves the effectiveness and feasibilityof the method proposed in this paper
To better illustrate the effectiveness of the method pro-posed in this paper the following example is presented
Example 12 Consider the parameters of system (1) as follows
119860 = [[[[[[
021 0 035 10 minus53 minus586 323
365 minus11 minus156 minus0890 0 minus158 minus285
]]]]]]
119861 = [559 12 minus089 13]119879 119862 = [17 02 015 minus018]
Mathematical Problems in Engineering 17
minus15
minus1
minus05
0
05
1
15
Stat
e X1 2 3 4 5 6 7 8 9 100
Time s
R1R2
R3R4
Figure 7 The state response curve of double-fault NCS
Δ119860 = [[[[
082 sin 119905 0 0 00 012 sin 119905 0 00 0 minus058 sin 119905 00 0 0 101 sin 119905]]]]
Δ119861 = [[[[
minus015 sin 119905008 sin 1199050minus028 sin 119905]]]]
119867 = [[[[
minus041 096 052 0006 minus057 0 021121 0 059 0minus032 minus011 minus035 minus003]]]]
119863 = 1198684times4119865 (119905) = diag (sin 119905 sin 119905 sin 119905 sin 119905)
(73)
Therefore we have
1198641 = diag (082 012 minus058 101) 1198642 = [minus015 008 0 minus028]119879 (74)
For this simulation the initial state of system is assumedas 119909(0) = [121 minus051 023 minus018]119879 and the externaldisturbance is considered as
120596 (119905) = [015 cos 119905 015 cos 119905 minus012 sin 119905 minus025 cos 119905]119879 6119904 le 119905 le 81199040 119900119905ℎ119890119903119904 (75)
The uncertain time-varying delay satisfies 0 le 120578(119905) le023119904 In addition the fault bounds of the system are givenin Table 2 Other parameters are selected as follows
1205821 = 121205822 = minus2031205823 = 1681205824 = minus231205825 = minus1051205826 = 6051205827 = 5121198781 = diag (19888 15634 8709 12876) 1198782 = 586
1205881 = 57981205882 = 1879ℓ = 1
(76)
By taking advantage of the LMI tool box and submittingthese parameters above into inequalities 10 and (68) we canobtain the 119867infin guaranteed cost control gain
119870 = 119884119883minus1198791198660minus1= [minus17256 15512 minus08571 07451]
with 120574 = radic120583 = 5819806(77)
The corresponding optimal performance indicator is 119869lowast =65021047 From the state response shown in Figure 7 andcontrol signal shown in Figure 8 we undoubtedly know
18 Mathematical Problems in Engineering
Table 2 The bounds of faults
Symbol Upper bound Lower boundActuatorfaultsΘ 150 012
SensorFaults119866
[[[[[[[[
185 0 0 00 160 0 00 0 125 00 0 0 165
]]]]]]]]
[[[[[[[[
025 0 0 00 0 0 00 0 0 00 0 0 015
]]]]]]]]
minus4
minus3
minus2
minus1
0
1
2
Con
trol i
nput
1 2 3 4 5 6 7 8 9 100Time s
Figure 8 The control input of double-fault NCS
the double-fault NCS is asymptotically stable when the 119867infinguaranteed cost controller is used This further demonstratesthe feasibility and effectiveness of the method proposed inthis paper
6 Conclusions
The issues of modelling and 119867infin guaranteed cost fault-tolerant control of double-fault networked control systemshave been addressedThe closed-loopmodel of a double-faultNCS is set up with regard to the influences of transmissiondelay packet dropout uncertain parameters and externaldisturbance In addition the piecewise delay method is pro-posed to reduce the conservatism when analysing the delay-dependent faulty system With the help of Lee Y Srsquos lemmathe sufficient condition of guaranteed cost fault-tolerantfor time-varying double-fault NCS is introduced using theLyapunov-Krasovskii theory and weighted technology Themethod of designing a guaranteed cost fault-tolerant con-troller for this NCS is given based on LMI Our next researchtask will be choosing more reasonable values of parameters120582119894 (119894 = 1 2 3 4 5 6 7) to reduce the conservatism further Ofcourse the study on scheduling policy of double-fault NCS isalso a challenge but indispensable work
Data Availability
The data used in this paper can be got by simulations
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was partly supported by National Nature Sci-ence Foundation of China under Grants 51875380 51375323and 61563022 Cooperative Innovation Fund-Prospective ofJiangsu Province under Grant BY2016044-01Major Programof Natural Science Foundation of Jiangxi Province Chinaunder Grant 20152ACB20009 High Level Talents of ldquoSix Tal-ent Peaksrdquo in Jiangsu Province China under Grant DZXX-046
References
[1] H Zhang Y Shi J Wang and H Chen ldquoA New Delay-compensation Scheme for Networked Control Systems inController Area Networksrdquo IEEE Transactions on IndustrialElectronics vol 65 no 9 pp 7239ndash7247 2018
[2] A Da Silva and C Kawan ldquoRobustness of critical bit rates forpractical stabilization of networked control systemsrdquo Automat-ica vol 93 pp 397ndash406 2018
[3] Q Zhu K Lu and Y Zhu ldquoGuaranteed cost control ofnetworked control systems under transmission control protocolwith active queue managementrdquo Asian Journal of Control vol18 no 4 pp 1546ndash1557 2016
[4] Q Zhu K Lu and Y Zhu ldquoHinfin Guaranteed Cost Control forNetworked Control Systems under Scheduling Policy Based onPredicted Errorrdquo Mathematical Problems in Engineering vol2014 Article ID 586029 12 pages 2014
[5] W H Chen J X Xu and Z H Guan ldquoGuaranteed cost controlfor uncertain Markovian jump systems with mode-dependenttime-delaysrdquo IEEE Transactions on Automatic Control vol 48no 12 pp 2270ndash2277 2003
[6] HM Soliman A DabroumM S Mahmoud andM SolimanldquoGuaranteed-cost reliable control with regional pole placementof a power systemrdquo Journal of 13e Franklin Institute vol 348no 5 pp 884ndash898 2011
[7] X Li and X-B Wu ldquoGuaranteed cost fault-tolerant controllerdesign of networked control systems under variable-periodsamplingrdquo Information Technology Journal vol 8 no 4 pp 537ndash543 2009
[8] L Zhang and G Orosz ldquoMotif-Based Design for ConnectedVehicle Systems in Presence of Heterogeneous ConnectivityStructures and Time Delaysrdquo IEEE Transactions on IntelligentTransportation Systems vol 17 no 6 pp 1638ndash1651 2016
[9] Z Li G Guo and Z Liu ldquoCommunication parameter designfor networked control systems with the slotted ALOHA accessprotocolrdquo Information Sciences vol 447 pp 205ndash215 2018
[10] K Lu G Jing and L Wang ldquoDistributed algorithm for solv-ing convex inequalitiesrdquo Institute of Electrical and ElectronicsEngineers Transactions on Automatic Control vol 63 no 8 pp2670ndash2677 2018
[11] Q Zhu K Lu and Y Zhu ldquoObserver-based feedback controlof networked control systems with delays and packet dropoutsrdquoJournal of Dynamic SystemsMeasurement andControl vol 138no 2 pp 1ndash8 2016
Mathematical Problems in Engineering 19
[12] Y Li H Li and W Sun ldquoEvent-triggered control for robust setstabilization of logical control networksrdquo Automatica vol 95pp 556ndash560 2018
[13] X Luan P Shi and F Liu ldquoStabilization of networked controlsystems with random delaysrdquo IEEE Transactions on IndustrialElectronics vol 58 no 9 pp 4323ndash4330 2011
[14] Y Zhang and J Jiang ldquoBibliographical review on reconfigurablefault-tolerant control systemsrdquo Annual Reviews in Control vol32 no 2 pp 229ndash252 2008
[15] N H Ei-Farra A Gani and P D Christofides ldquoFault-tolerantcontrol of process systems using communication networksrdquoAIChE Journal vol 51 no 6 pp 1665ndash1682 2005
[16] H R Karimi and H Gao ldquoNew delay-dependent exponentialHinfin synchronization for uncertain neural networks withmixedtime delaysrdquo IEEE Transactions on Systems Man and Cybernet-ics Part B Cybernetics vol 40 no 1 pp 173ndash185 2010
[17] Y N Guo Q Y Zhang D W Gong and J H Zhang ldquoRobustfault-tolerant control of networked control systems with time-varying delaysrdquoControl andDecision vol 23 no 6 pp 689ndash6922008
[18] Z Mao and B Jiang ldquoFault identification and fault-tolerantcontrol for a class of networked control systemsrdquo InternationalJournal of Innovative Computing Information and Control vol3 no 5 pp 1121ndash1130 2007
[19] C-X Yang Z-H Guan and J Huang ldquoStochastic fault tolerantcontrol of networked control systemsrdquo Journal of 13e FranklinInstitute vol 346 no 10 pp 1006ndash1020 2009
[20] Z Mao Y Pan B Jiang and W Chen ldquoFault Detectionfor a Class of Nonlinear Networked Control Systems withCommunication Constraintsrdquo International Journal of ControlAutomation and Systems vol 16 no 1 pp 256ndash264 2018
[21] A Qiu J Gu C Wen and J Zhang ldquoSelf-triggered faultestimation and fault tolerant control for networked controlsystemsrdquo Neurocomputing vol 272 no 1 pp 629ndash637 2018
[22] Q Zhu K Lu G Xie and Y Zhu ldquoGuaranteed Cost Fault-Tolerant Control for Networked Control Systems with SensorFaultsrdquoMathematical Problems in Engineering vol 2015 ArticleID 549347 9 pages 2015
[23] W Wu and Y Zhang ldquoEvent-triggered fault-tolerant controland scheduling codesign for nonlinear networked control sys-tems with medium-access constraint and packet disorderingrdquoInternational Journal of Robust and Nonlinear Control vol 28no 4 pp 1182ndash1198 2018
[24] X Xiao and X-J Li ldquoAdaptive dynamic programming method-based synchronisation control of a class of complex dynamicalnetworks with unknown dynamics and actuator faultsrdquo IETControl 13eory amp Applications vol 12 no 2 pp 291ndash298 2018
[25] PMhaskar AGani CMcFall PDChristofides and J FDavisldquoFault-tolerant control of nonlinear process systems subject tosensor faultsrdquo AIChE Journal vol 53 no 3 pp 654ndash668 2007
[26] M Liu P Shi L Zhang and X Zhao ldquoFault-tolerant controlfor nonlinear Markovian jump systems via proportional andderivative sliding mode observer techniquerdquo IEEE Transactionson Circuits and Systems I Regular Papers vol 58 no 11 pp2755ndash2764 2011
[27] S Li D Sauter C Aubrun and J Yame ldquoStability guaranteedactive fault-tolerant control of networked control systemsrdquoJournal of Control Science and Engineering vol 2008 Article ID189064 9 pages 2008
[28] X Y Luo M J Shang C L Chen and X P Guan ldquoGuaranteedcost active fault-tolerant control of networked control system
with packet dropout and transmission delayrdquo InternationalJournal of Automation and Computing vol 7 no 4 pp 509ndash5152010
[29] Q Zhu B Xie and Y Zhu ldquoGuaranteed Cost Control forMultirate Networked Control Systems with Both Time-Delayand Packet-Dropoutrdquo Mathematical Problems in Engineeringvol 2014 Article ID 637329 9 pages 2014
[30] R Manivannan R Samidurai J Cao and M Perc ldquoDesign ofResilient Reliable Dissipativity Control for Systems with Actu-ator Faults and Probabilistic Time-Delay Signals via Sampled-Data Approachrdquo IEEE Transactions on Systems Man andCybernetics Systems 2018
[31] R Manivannan R Samidurai J Cao A Alsaedi and F EAlsaadi ldquoNon-Fragile Extended Dissipativity Control Designfor Generalized Neural Networks with Interval Time-DelaySignalsrdquo Asian Journal of Control 2019
[32] Q Gao and N Olgac ldquoBounds of imaginary spectra of LTIsystems in the domain of two of the multiple time delaysrdquoAutomatica vol 72 pp 235ndash241 2016
[33] Q Gao A S Kammer U Zalluhoglu and N Olgac ldquoCriticaleffects of the polarity change in delayed states within anLTI dynamics with multiple delaysrdquo Institute of Electrical andElectronics Engineers Transactions onAutomatic Control vol 60no 11 pp 3018ndash3022 2015
[34] Q Gao Z Zhang and C Yang ldquoSign inverting control andits important properties for multiple time-delayed systemsrdquo inProceedings of the 10th ASME Dynamic Systems and ControlConference pp 979ndash984 Virginia USA 2017
[35] Y M Zhang and J Jiang ldquoActive fault-tolerant control systemagainst partial actuator failuresrdquo IEE Proceedings Control13eoryand Applications vol 149 no 1 pp 95ndash104 2002
[36] G Garcia J Bernussou andD Arzelier ldquoRobust stabilization ofdiscrete-time linear systems with norm-bounded time-varyinguncertaintyrdquo Systems amp Control Letters vol 22 no 5 pp 327ndash339 1994
[37] Y Wang L Xie and C E de Souza ldquoRobust control of a classof uncertain nonlinear systemsrdquo Systems amp Control Letters vol19 no 2 pp 139ndash149 1992
[38] D Yue E Tian and Y Zhang ldquoA piecewise analysis methodto stability analysis of linear continuousdiscrete systems withtime-varying delayrdquo International Journal of Robust and Non-linear Control vol 19 no 13 pp 1493ndash1518 2009
[39] X-J Jing D-L Tan and Y-C Wang ldquoAn LMI approach tostability of systems with severe time-delayrdquo IEEE Transactionson Automatic Control vol 49 no 7 pp 1192ndash1195 2004
[40] D Yue Q-L Han and J Lam ldquoNetwork-based robust Hinfincontrol of systems with uncertaintyrdquo Automatica vol 41 no 6pp 999ndash1007 2005
[41] Z Wang F Yang D W C Ho and X Liu ldquoRobust Hinfincontrol for networked systemswith randompacket lossesrdquo IEEETransactions on Systems Man and Cybernetics Part B vol 37no 4 pp 916ndash924 2007
[42] M S Mahmoud ldquoControl of uncertain state-delay systemsguaranteed cost approachrdquo IMA Journal of Mathematical Con-trol and Information vol 18 no 1 pp 109ndash128 2001
[43] D Yue C Peng andG Y Tang ldquoGuaranteed cost control of lin-ear systems over networks with state and input quantisationsrdquoIEE Proceedings Control 13eory and Applications vol 153 no 6pp 658ndash664 2006
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

2 Mathematical Problems in Engineering
in [6] In [7] X Li investigated the issue of integrity againstactuator faults for NCS under variable-period sampling inwhich the existence conditions of a guaranteed cost fault-tolerant control law was tested in terms of the Lyapunov sta-bility theory The resilient reliable dissipativity performanceindex for systems including actuator faults and probabilistictime delay signals is investigated by authors in [30 31] Unfor-tunately all the previously mentioned literature investigatedthe guaranteed cost fault-tolerant control for NCS of single-faults (just considering the condition that only actuator faultsoccur or sensor faults occur) Few articles examine thedouble-fault issue In practical application it is easy for thesensors and actuators to become faulty simultaneously whenthe NCS works in a poor environment and is affected byexternal disturbance Improving the control performance ofNCS when double-faults occur is important This motivatesus to investigate 119867infin guaranteed cost fault-tolerant controlof double-fault NCS which is a necessary but challengetask
This paper develops a 119867infin guaranteed cost fault-tolerantcontrol for a double-fault NCS to guarantee its stability Thetime-varying properties of sensor faults and actuator faultsare modelled as two time-varying and bounded parametermatrices and the networked control system is built as alinear closed-loop system with transmission delays and datapacket dropouts Different from [30 31] here it is necessaryto deal with two dynamic matrices One of them is locatedat the left hand side of the gain matrix and the other one islocated at the right hand side of the gain matrix This bringschallenges to searching a feasible control gain To solve suchproblem a piecewise delaymethod is proposed to analyse thedelay-dependent faulty system for reducing the conservatismThe delay falling in each subinterval is treated as a caseFor different cases different weighted technology is used toderive the 119867infin guaranteed cost fault-tolerant condition andthe controller parameter for this NCS is obtained by solvingseveral sets of LMIs Compared with [26 32ndash34] the delayconsidered in this paper can be continuously changed withtime
Notation 119877119899 denotes the n-dimensional Euclidean spaceThesuperscript ldquo119879rdquo stands for matrix transpositionThe notation119883 gt 0 means that the matrix 119883 is a real positive definitematrix 119868 is the identity matrix of appropriate dimensions[ 119883 119885lowast 119884 ] denotes a symmetricmatrix wheredenotes the entriesimplied by symmetry
2 Modelling of Double-Fault NCS
The linear control plant of NCS with uncertain parametersand external disturbance can be expressed as
1199091015840 (119905) = (119860 + Δ119860) 119909 (119905) + (119861 + Δ119861) 119906 (119905) + 119867120596 (119905)119910 (119905) = 119862119909 (119905) (1)
where 119909(119905) isin 119877119899 119906(119905) isin 119877119898 119910(119905) isin 119877119903 and 120596(119905) isin1198712[0 infin) isin 119877119899 represent state value input output andexternal disturbance respectively Separately 119860 119861 119867 and119862 are matrices with appropriate dimensions Δ119860 and Δ119861 are
x(t)
xF(t)
uF(t)
Delay sc (t)
Delay ca (t)
S1 S2
Control plant
Network
Actuator
Sensor
Controller
Figure 1 The structure of double-fault NCS
matrices with uncertain time-varying parameters satisfying[Δ119860 Δ119861] = 119863119865(119905)[1198641 1198642] 119865(119905) is an unknown matrixfunction with Legesgue measurable properties satisfying119865119879(119905)119865(119905) le 119868 and 119863 1198641 and 1198642 are constant matrices withappropriate dimensions
For the convenience of the later formulation two con-cepts can be initially introduced
Definition 1 The sensor faults and actuator faults could occursimultaneously that is there may be two types of faults at onetime this kind of fault is called a double-fault
Definition 2 The sensor faults and actuator faults do notoccur simultaneously that is there is only one type of faultat one time this kind of fault is called a single-fault
The structure of a double-fault NCS is shown in Figure 1Transmission delays induced by the network are the sensor-to-controller delay 120591119904119888 and the controller-to-actuator delay120591119888119886 These two delays can be combined when the feedbackcontroller is static The state of the system is assumed tobe completely measurable A piecewise continuous feedbackcontroller which is realized by a zero-order hold (ZOH) isemployed
119906 (119905) = 119870 (119905 minus 120591119888119886) 119905 isin [119905119896 119905119896+1) 119896 = 1 2 sdot sdot sdot (2)
where 119870 is the state feedback gain matrix to be designed and119905119896 is the sampling instantConsidering that sensor faults may occur 119909119865119894 (119905) is used
to represent the data from the 119894-th sensor In this paper weconsider faults that include outage and loss of effectiveness Ifthe 119894-th sensor is an outage the corresponding sampling workis interrupted and the sampling data keeps the default value119909119865119894 (119905) = 0 If the 119894-th sensor loses effectiveness the samplingdata is inaccurate and nonzero We denote the sensor faultmodel as
119909119865119894 (119905) = 119892119894 (119905) 119909119894 (119905) 119894 = 1 2 sdot sdot sdot 119899 (3)
where 119892119894(119905) is the time-varying sensor efficiency factor 119892119894 = 1represents that the 119894-th sensor is normal 119892119894 = 0 representsthat its fault is outage and 0 lt 119892119894 lt 1 or 119892119894 gt 1 representsthat its fault is loss of effectivenessThe upper bound of sensorefficiency factor 119892119894(119905) is denoted by a constant 119892119906119894 satisfying
Mathematical Problems in Engineering 3
119892119906119894 gt 1 while its lower bound is denoted by a constant 119892119897119894satisfying 0 le 119892119897119894 lt 1
Denoting 119909119865(119905) = [1199091198651 (119905) 1199091198652 (119905) sdot sdot sdot 119909119865119899 (119905)]119879 we have119909119865 (119905) = 119866 (119905) 119909 (119905) (4)
where 119866(119905) = diag(1198921(119905) 1198922(119905) sdot sdot sdot 119892119899(119905)) is the sensor faultindicator matrix Correspondingly its upper bound matrix is119866119906 = diag(1198921199061 1198921199062 sdot sdot sdot 119892119906119899) and its lower bound matrix is119866119897 = diag(1198921198971 1198921198972 sdot sdot sdot 119892119897119899)
Data packet dropouts in NCS are also unavoidablebecause of limited bandwidth Considering that data packetdropouts may occur the network is modelled as a switchWhen the switch is located in 1198781 position the data packetcontaining 119909(119905119896) is transmitted and the controller utilizes theupdated data When it is located in the 1198782 position the datapacket dropouts occur and the controller uses the old dataFor a fixed sampling period ℎ the dynamics of the switch canbe expressed as follows
The NCS with no packet dropout at time 119905119896 (119905) = 119866 (119905119896 minus 120591119904119888) 119909 (119905119896 minus 120591119904119888) (5)
The NCS with one packet dropout at time 119905119896 (119905) = 119866 (119905119896 minus 120591119904119888 minus ℎ) 119909 (119905119896 minus 120591119904119888 minus ℎ) (6)
The NCS with 119889119896 isin 119885+ packet dropout at time 119905119896 (119905) = 119866 (119905119896 minus 120591119904119888 minus 119889119896ℎ) 119909 (119905119896 minus 120591119904119888 minus 119889119896ℎ) (7)
Because the feedback controller is static (2) can be expressedas
119906 (119905)= 119870119866 (119905119896 minus 120591119888119886 minus 120591119904119888 minus 119889119896ℎ) 119909 (119905119896 minus 120591119888119886 minus 120591119904119888 minus 119889119896ℎ) (8)
Considering that actuator faults may also occur 119906119865119895 (119905) isused to represent the signal from the 119895-th actuator Similarlywe denote the actuator fault model as
119906119865119894 (119905) = 120575119895 (119905) 119906119895 (119905) 119895 = 1 2 sdot sdot sdot 119898 (9)
where 120575119895(119905) is the time-varying actuator efficiency factor 120575119895 =1 represents that the 119895-th actuator is normal 120575119895 = 0 representsthat its fault is an outage and 0 lt 120575119895 lt 1 or 120575119895 gt 1 denotes thatits fault is a loss of effectiveness The upper bound of sensorefficiency factor 120575119895(119905) is denoted by a constant 120575119906119895 satisfying120575119906119895 gt 1 while its lower bound is denoted by a constant 120575119897119895satisfying 0 le 120575119897119895 lt 1
Denoting the faulty control signal 119906119865(119905) =[1199061198651 (119905) 1199061198652 (119905) sdot sdot sdot 119906119865119898(119905) ]119879 we can obtain the fault-tolerantcontrol law as
119906119865 (119905) = Θ (119905) 119906 (119905) = Θ (119905) 119870119866 (119905119896 minus 120591119888119886 minus 120591119904119888 minus 119889119896ℎ)sdot 119909 (119905119896 minus 120591119888119886 minus 120591119904119888 minus 119889119896ℎ) (10)
whereΘ(119905) = diag(1205751(119905) 1205752(119905) sdot sdot sdot 120575119898(119905)) is the actuator faultindicator matrix Correspondingly its upper bound matrix is
Θ119906 = diag(1205751199061 1205751199062 sdot sdot sdot 120575119906119898) and its lower bound matrix isΘ119897 = diag(1205751198971 1205751198972 sdot sdot sdot 120575119897119898)Let 120578(119905) = 119905 minus 119905119896 + 120591119888119886 + 120591119904119888 + 119889119896ℎ 119905 isin [119905119896 119905119896+1) (10) can
now be expressed as follows
119906119865 (119905) = Θ (119905) 119906 (119905) = Θ (119905) 119870119866 (119905 minus 120578 (119905)) 119909 (119905119896 minus 120578 (119905)) (11)
Obviously the delay part 120578(119905) may vary with time 119905 and itsatisfies
120578119898 le 120578 (119905) = 119905 minus 119905119896 + 120591119888119886 + 120591119904119888 + 119889119896ℎ le 120578119872119905 isin [119905119896 119905119896+1) (12)
From the upper bounds119866119906 Θ119906 of fault indicator matricesand lower bounds 119866119897 Θ119897 of fault indicator matrices thenonsingular mean-value matrices are separately obtained as
1198660 = diag (11989201 11989202 sdot sdot sdot 1198920119899) 1198920119894 = 119892119906119894 + 1198921198971198942Θ0 = diag (12057501 12057502 sdot sdot sdot 1205750119898) 1205750119895 = 120575119906119895 + 1205751198971198952
(13)
Moreover the following two time-varying matrices areintroduced
119871 (119905 minus 120578 (119905))= diag (1198971 (119905 minus 120578 (119905)) 1198972 (119905 minus 120578 (119905)) sdot sdot sdot 119897119899 (119905 minus 120578 (119905)))
119897119894 (120578 (119905)) = 119892119894 (120578 (119905)) minus 11989201198941198920119894Γ (119905) = diag (1205821 (119905) 1205822 (119905) sdot sdot sdot 120582119898 (119905)) 120582119894 (119905) = 120575119895 (119905) minus 12057501198951205750119895
(14)
Obviously we have
minus1 le 119892119897119894 minus 11989201198941198920119894 le 119897119894 (119905 minus 120578 (119905)) = 119892119894 minus 11989201198941198920119894 le 119892119906119894 minus 11989201198941198920119894= 119892119906119894 minus 119892119897119894119892119906119894 + 119892119897119894 le 1 (15)
Similarly we have
minus1 le 120582119895 (119905) le 1 (16)
In expressions from (13) to (16) 119894 and 119895 meet 119894 = 1 2 119899119895 = 1 2 119898 Based on (15) and (16) we have
minus119868119899times119899 le 119871 (119905 minus 120578 (119905)) le 119868119899times119899minus119868119898times119898 le Γ (119905) le 119868119898times119898 (17)
From on (14) the following can be obtained
119892119894 (119905 minus 120578 (119905)) = 1198920119894 (1 + 119897119894 (119905 minus 120578 (119905))) 119894 = 1 2 sdot sdot sdot 119899120575119894 (119905) = 1205750119894 (1 + 120582119894 (119905)) 119895 = 1 2 sdot sdot sdot 119898 (18)
4 Mathematical Problems in Engineering
Naturally the time-varying fault indicator matrices can berewritten as
119866 (119905 minus 120578 (119905)) = 1198660 (119868 + 119871 (119905 minus 120578 (119905))Θ (119905) = Θ0 (119868 + Γ (119905)) (19)
Inserting (19) into (11) we have
119906 (119905)= Θ0 (119868 + Γ (119905)) 1198701198660 (119868 + 119871 (119905 minus 120578 (119905))) 119909 (119905 minus 120578 (119905)) (20)
Then the new model of double-fault NCS can be obtained asfollows
1199091015840 (119905) = (119860 + Δ119860) 119909 (119905) + (119861 + Δ119861) Θ0 (119868 + Γ (119905))sdot 1198701198660 (119868 + 119871 (119905 minus 120578 (119905))) 119909 (119905 minus 120578 (119905)) + 119867120596 (119905)
119910 (119905) = 119862119909 (119905)(21)
Remark 3 The networked control systems in faulty case canbe modelled as system (21) with the effects of time-varyingdelay 120578(119905)whose upper bound and lower bound are describedin (12) Unlike the previousmodels [17 21 27 35] this modelis related to both sensor faults and actuator faults the faultsare time-varying which are reflected by the time-varyingparameters 119871(119905 minus 120578(119905)) and Γ(119905) From (17) we undoubtedlyknow the time-varying parameter 119871(119905 minus 120578(119905)) satisfies 119871119879119871 =1198712 le 119868 while the parameter Γ(119905) satisfies Γ119879Γ = Γ2 le 119868Remark 4 From the descriptions of faults matrices weundoubtedly know if 119897119894 = 11198920119894 minus 1 (119894 = 1 2 sdot sdot sdot 119899) we canobtain 119892119894 = 1 and 1198660(119868 + 119871(119905 minus 120578(119905))) = 119868 and then model (21)is an actuator fault model Similarly if 120582119894 = (120575119895 minus1205750119895)1205750119895 (119895 =1 2 sdot sdot sdot 119898) we can obtain 120575119895 = 1 and Θ0(119868 + Γ(119905)) = 119868 andthen model (21) represents a sensor fault model Thereforemodel (21) of a double-fault NCS contains cases of single-faults and the single-faults are a special formof double-faults
In the following section a fundamental preliminary resultis presented to guarantee the performance of a double-faultNCS based on the delay information
3 Performance Analysis of Double-Fault NCS
For the system model (21) established in Section 2 the costfunction is given as follows
119869 = intinfin0
[119909119879 (119905) 1198781119909 (119905) + 119906119879 (119905) 1198782119906 (119905)] 119889119905= intinfin0
119909119879 (119905) 1198781119909 (119905)+ [Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) 119909 (119905 minus 120578 (119905))]119879sdot 1198782Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) 119909 (119905 minus 120578 (119905)) 119889119905
(22)
where 1198781 and 1198782 are symmetric positive definite matrices
Definition 5 Formodel (21) and its cost function (22) if thereexists a control gain matrix 119870 satisfying the conditions
(1) the closed-loop system is asymptotically stable when120596(119905) = 0(2) for any zero initial condition and any nonzero vector120596(119905) isin 1198712[0 infin) given 120574 gt 0 the output 119910(119905) satisfies119910(119905)2 le 120574120596(119905)2(3) there exists a constant 1198690 and the cost function definedas (22) satisfies 119869infin le 1198690
then matrix 119870 is the 119867infin guaranteed cost control gain ofdouble-faults NCS
To analyse the stability of the system expediently thefollowing lemmas are introduced
Lemma 6 (see [36 37]) For any matrices119882119872119873 119865(119905) withFT119865 le 119868 and any scalar 120576 gt 0 the inequality holds as
119882 + 119872119865 (119905) 119873 + 119873119879119865119879 (119905) 119872119879le 119882 + 120576119872119872119879 + 120576minus1119873119879119873 (23)
Lemma 7 (see [38]) If 1205781 le 120578(119905) le 1205782 for any matrices Π1Π2 and Φ the following inequalities are equivalent(1) [120578(119905) minus 1205781]Π1 + [1205782 minus 120578(119905)]Π2 + Φ lt 0(2) [1205782 minus 1205781]Π1 + Φ lt 0 [1205782 minus 1205781]Π2 + Φ lt 0The fundamental preliminary result is presented in the
following theorem
Theorem 8 Given symmetric positive definite matrices 1198781 and1198782 a set of constant 120578119898 120578119872 1205881 gt 0 1205882 gt 0 and 120572 =(120578119872 minus 120578119898)2 If there exists a set of symmetric positive definitematrices 119877119894 (119894 = 1 2 3) and matrix 119875 gt 0 as well as matrices119872119897120573 1198722120573 119873119897120573 1198732120573 119880120573 (120573 = 1 2 3 4 5 6 7 8) 119870 and a setof constants 120576 gt 0 and 120574 gt 0 satisfying the LMIs
[[[[[[[[[[[[[[[[[
minus120576119868 0 0 0 120576119879lowast minus (1198781 + 119862119879119862)minus1 0 0 lowast lowast minus1198782minus1 0 Σlowast lowast lowast minusΓ119897 Ω119897119896lowast lowast lowast lowast Φ119897lowast lowast lowast lowast lowastlowast lowast lowast lowast lowastlowast lowast lowast lowast lowastlowast lowast lowast lowast lowastlowast lowast lowast lowast lowast
997888rarr
0 0 0 0 00 0 0 0 00 Θ0119870119866 0 Θ0 00 0 0 0 0119879 Θ 0 Δ 119879minus120576119868 1198642Θ01198701198660 0 1198642Θ0 0lowast minus12058811198805 0 0 (1198701198660)119879lowast lowast minus1205881minus11198805minus1 0 0lowast lowast lowast minus1205882119868 0lowast lowast lowast lowast minus1205882minus1119868
]]]]]]]]]]]]]]]]]
lt 0
119897 = 1 2 119896 = 1 2
(24)
where
Mathematical Problems in Engineering 5
Φ1 =
[[[[[[[[[[[[[[[[[[[
minus1198771 + 1198801119860 + (1198801119860)119879 1198771 + (1198802119860)119879 + 11987211 (1198803119860)119879 minus 11987311 (1198804119860)119879lowast minus1198771 + 11987212 + 11987212119879 11987213119879 minus 11987312 11987214119879lowast lowast minus1198773120572 minus 11987312 minus 11987312119879 1198773120572 minus 11987314119879lowast lowast lowast minus1198773120572lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
119875 minus 1198801 + (1198805119860)119879 Ψ1 + (1198806119860)119879 (1198807119860)119879 + (1198808119860)119879 + 1198801119867 0minus1198802 + 11987215119879 Ψ2 + 11987216119879 1198802119867 + 11987217119879 + 11987218119879 0minus1198803 minus 11987315119879 Ψ3 minus 11987316119879 1198803119867 minus 11987317119879 minus 11987318119879 0
minus1198804 Ψ4 1198804119867 012057811989821198771 + 120572 (1198772 + 1198773) minus 1198805 minus 1198805119879 Ψ5 minus 1198806119879 1198805119867 minus 1198807119879 minus 1198808119879 0
lowast Ψ6 Ξ 0lowast lowast 1198807119867 + 1198808119867 + (1198807119867)119879 + (1198808119867)119879 0lowast lowast lowast minus1205742119868
]]]]]]]]]]]]]]]]]]]
Φ2 =
[[[[[[[[[[[[[[[[[[[[
minus1198771 + 1198801119860 + (1198801119860)119879 1198771 + (1198802119860)119879 (1198803119860)119879 + 11987221 (1198804119860)119879 minus 11987321lowast minus1198771 minus 1198772120572 1198772120572 + 11987222 minus11987322lowast lowast minus1198772120572 + 11987223 + 11987223119879 11987224119879 minus 11987323lowast lowast lowast minus11987324 minus 11987324119879lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
119875 minus 1198801 + (1198805119860)119879 Ψ11015840 + (1198806119860)119879 (1198807119860)119879 + (1198808119860)119879 + 1198801119867 0minus1198802 Ψ21015840 1198802119867 0
minus1198803 + 11987225119879 Ψ31015840 + 11987226119879 1198803119867 + 11987227119879 + 11987228119879 0minus1198804 minus 11987325119879 Ψ41015840 minus 11987326119879 1198804119867 minus 11987327119879 minus 11987328119879 0
12057811989821198771 + 120572 (1198772 + 1198773) minus 1198805 minus 1198805119879 Ψ51015840 minus 1198806119879 1198805119867 minus 1198807119879 minus 1198808119879 0lowast Ψ61015840 Ξ1015840 0lowast lowast 1198807119867 + 1198808119867 + (1198807119867)119879 + (1198808119867)119879 0lowast lowast lowast minus1205742119868
]]]]]]]]]]]]]]]]]]]]]
Γ1 = 1205721198772Γ2 = 1205721198773
Ω11 = 1205721198721119879
6 Mathematical Problems in Engineering
Ω12 = 1205721198731119879Ω21 = 1205721198722119879Ω22 = 1205721198732119879
1198721119879 = [11987211119879 11987212119879 11987213119879 11987214119879 11987215119879 11987216119879 11987217119879 11987218119879] 1198722119879 = [11987221119879 11987222119879 11987223119879 11987224119879 11987225119879 11987226119879 11987227119879 11987228119879]
1198731119879 = [11987311119879 11987312119879 11987313119879 11987314119879 11987315119879 11987316119879 11987317119879 11987318119879] 1198732119879 = [11987321119879 11987322119879 11987323119879 11987324119879 11987325119879 11987326119879 11987327119879 11987328119879]
Ξ = (1198807119861Θ01198701198660)119879 + (1198808119861Θ01198701198660)119879 + 1198806119867 minus 11987217119879 minus 11987218119879 + 11987317119879 + 11987318119879Ψ119894 = 119880119894119861Θ01198701198660 + 1198731119894 minus 1198721119894 (119894 = 1 2 3 4 5)
Ψ6 = 1198806119861Θ01198701198660 + (1198806119861Θ01198701198660)119879 minus 11987216 minus 11987216119879 + 11987316 + 11987316119879Ξ1015840 = (1198807119861Θ01198701198660)119879 + (1198808119861Θ01198701198660)119879 + 1198806119867 minus 11987227119879 minus 11987228119879 + 11987327119879 + 11987328119879
Ψ1198941015840 = 119880119894119861Θ01198701198660 + 1198732119894 minus 1198722119894 (119894 = 1 2 3 4 5) Ψ10158406 = 1198806119861Θ01198701198660 + (1198806119861Θ01198701198660) 119879 minus 11987226 minus 11987226119879 + 11987326 + 11987326119879
= [(1198801119863)119879 (1198802119863)119879 (1198803119863)119879 (1198804119863)119879 (1198805119863)119879 (1198806119863)119879 (1198807119863)119879 + (1198808119863)119879 0]119879 = [1198641 0 0 0 0 1198642Θ01198701198660 0 0]
0 = [0 0 0 0 0 119868 0 0]119879 = [119868 0 0 0 0 0 0 0]
Θ = [(1198801119861Θ01198701198660)119879 (1198802119861Θ01198701198660)119879 (1198803119861Θ01198701198660)119879 (1198804119861Θ01198701198660)119879 (1198805119861Θ01198701198660)119879 (1198806119861Θ01198701198660)119879 (11988071198611198701198660)119879 + (11988081198611198701198660)119879 0]119879 Δ = [(1198801119861Θ0)119879 (1198802119861Θ0)119879 (1198803119861Θ0)119879 (1198804119861Θ0)119879 (1198805119861Θ0)119879 (1198806119861Θ0)119879 (1198807119861Θ0)119879 + (1198808119861Θ0)119879 0]119879
= [0 0 0 0 0 1198701198660 0 0] Σ = [0 0 0 0 0 Θ01198701198660 0 0]
(25)
then model (21) is asymptotically stable with the 119867infin normbound 120574 In addition the upper bound 1198690 of cost function 119869 isgiven as
1198690 = 119909119879 (0119905) 119875119909 (0) + 120578119898 int0minus120578119898
int0119904
1199091015840119879 (120591) 11987711199091015840 (120591) 119889119904119889120591+ intminus120578119898minus1205781
int0119904
1199091015840119879 (120591) 11987721199091015840 (120591) 119889119904119889120591+ intminus1205781minus120578119872
int0119904
1199091015840119879 (120591) 11987731199091015840 (120591) 119889119904119889120591
(26)
Proof First with the definition of 120572 = (120578119872 minus 120578119898)2 and 1205781 =120578119898+120572 the interval of delay is distributed into two subintervalsas follows
120578 (119905) isin [120578119898 120578119872] = [120578119898 1205781] cup [1205781 120578119872] (27)
Then we consider the Lyapunov-Krasovskii functional asfollows
V (119905) = 119909119879 (119905) 119875119909 (119905)+ 120578119898 int119905
119905minus120578119898
int119905119904
1199091015840119879 (120591) 11987711199091015840 (120591) 119889119904119889120591+ int119905minus120578119898119905minus1205781
int119905119904
1199091015840119879 (120591) 11987721199091015840 (120591) 119889119904119889120591+ int119905minus1205781119905minus120578119872
int119905119904
1199091015840119879 (120591) 11987731199091015840 (120591) 119889119904119889120591
(28)
where matrix 119875 satisfies 119875 gt 0 and 119877119894 (119894 = 1 2 3)are symmetric positive definite matrices with appropriatedimensions For the convenience of writing we denote 119871 =119871(119905 minus 120578(119905)) and Γ = Γ(119905) in the following expressions
Mathematical Problems in Engineering 7
Calculating the derivative of Lyapunov-Krasovskii functionand based on (21) we have
V1015840 (119905) = 2119909119879 (119905) 1198751199091015840 (119905) + 12057821198981199091015840119879 (119905) 11987711199091015840 (119905)minus 120578119898 int119905
119905minus120578119898
1199091015840119879 (119904) 11987711199091015840 (119904) 119889119904 + (1205781 minus 120578119898) 1199091015840119879 (119905)sdot 11987721199091015840 (119905) minus int119905minus120578119898
119905minus1205781
1199091015840119879 (119904) 11987721199091015840 (119904) 119889119904 + (120578119872 minus 1205781)sdot 1199091015840119879 (119905) 11987731199091015840 (119905) minus int119905minus1205781
119905minus120578119872
1199091015840119879 (119904) 11987731199091015840 (119904) 119889119904+ 2 [120576119879 (119905) 120596119879 (119905)] 119880 [(119860 + Δ119860) 119909 (119905)+ (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) 119909 (119905 minus 120578 (119905))+ 119867120596 (119905) minus 1199091015840 (119905)]
(29)
where V1015840(119905) = lim sup120575997888rarr0+(1120575)[V(119905 + 120575) minus V(119905)] [39]Based on Jessenrsquos inequality we have
minus 120578119898 int119905119905minus120578119898
1199091015840119879 (119904) 11987711199091015840 (119904) 119889119904 le [119909119879 (119905) 119909119879 (119905 minus 120578119898)]sdot [minus1198771 11987711198771 minus1198771] [ 119909 (119905)
119909 (119905 minus 120578119898)](30)
minus int119905minus120578119898119905minus1205781
1199091015840119879 (119904) 11987721199091015840 (119904) 119889119904le 1120572 [119909119879 (119905 minus 120578119898) 119909119879 (119905 minus 1205781)]sdot [minus1198772 11987721198772 minus1198772] [119909 (119905 minus 120578119898)119909 (119905 minus 1205781)]
(31)
minus int119905minus1205781119905minus120578119872
1199091015840119879 (119904) 11987731199091015840 (119904) 119889119904le 1120572 [119909119879 (119905 minus 1205781) 119909119879 (119905 minus 120578119872)]sdot [minus1198773 11987731198773 minus1198773] [ 119909 (119905 minus 1205781)119909 (119905 minus 120578119872)]
(32)
where 120572 = (120578119872 minus 120578119898)2 For the convenience of the followingdiscussion we define
120576119879 (119905) = [119909119879 (119905) 119909119879 (119905 minus 120578119898) 119909119879 (119905 minus 1205781) 119909119879 (119905 minus 120578119872)sdot 1199091015840119879 (119905) 119909119879 (119905 minus 120578 (119905)) 120596119879 (119905)] (33)
Case 1 If 120578(119905) isin [120578119898 1205781] weighted technology based on theprinciple of Newton-Leibniz is introduced as follows
2 [120576119879 (119905) 120596119879 (119905)] 1198721 [119909 (119905 minus 120578119898) minus 119909 (119905 minus 120578 (119905))minus int119905minus120578119898119905minus120578(119905)
1199091015840119879 (119904) 119889119904] = 0(34)
and
2 [120576119879 (119905) 120596119879 (119905)] 1198731 [119909 (119905 minus 120578 (119905)) minus 119909 (119905 minus 1205781)minus int119905minus120578(119905)119905minus1205781
1199091015840119879 (119904) 119889119904] = 0(35)
Because 1198772 gt 0 we haveminus 2 [120576119879 (119905) 120596119879 (119905)] 1198721 int119905minus120578119898
119905minus120578(119905)1199091015840 (119904) 119889119904 le (120578 (119905) minus 120578119898)
sdot [120576119879 (119905) 120596119879 (119905)] 1198721119877minus12 1198721119879 [120576119879 (119905) 120596119879 (119905)]119879+ int119905minus120578119898119905minus120578(119905)
1199091015840119879 (119904) 11987721199091015840 (119904) 119889119904(36)
and
minus 2 [120576119879 (119905) 120596119879 (119905)] 1198731 int119905minus120578(119905)119905minus1205781
1199091015840 (119904) 119889119904 le (1205781 minus 120578 (119905))sdot [120576119879 (119905) 120596119879 (119905)] 1198731119877minus12 1198731119879 [120576119879 (119905) 120596119879 (119905)]119879+ int119905minus120578(119905)119905minus1205781
1199091015840119879 (119904) 11987721199091015840 (119904) 119889119904(37)
Therefore
minus 2 [120576119879 (119905) 120596119879 (119905)] 1198721 int119905minus120578119898119905minus120578(119905)
1199091015840 (119904) 119889119904minus 2 [120576119879 (119905) 120596119879 (119905)] 1198731 int119905minus120578(119905)
119905minus1205781
1199091015840 (119904) 119889119904le (120578 (119905) minus 120578119898)sdot [120576119879 (119905) 120596119879 (119905)] 1198721119877minus12 1198721119879 [120576119879 (119905) 120596119879 (119905)]119879+ (1205781 minus 120578 (119905))sdot [120576119879 (119905) 120596119879 (119905)] 1198731119877minus12 1198731119879 [120576119879 (119905) 120596119879 (119905)]119879+ int119905minus120578119898119905minus1205781
1199091015840119879 (119904) 11987721199091015840 (119904) 119889119904
(38)
In addition 119910119879(119905)119910(119905)minus1205742120596119879(119905)120596(119905) both on the left and rightsides of equality (29) and 119909119879(119905)1198781119909(119905) + [Θ0(119868 + Γ)1198701198660(119868 +119871)119909(119905 minus 120578(119905))]1198791198782Θ0(119868 + Γ)1198701198660(119868 + 119871)119909(119905 minus 120578(119905)) on the rightof the equal sign ldquo=rdquo and then inserting (30) (32) (34) (35)(38) to the obtained inequality we have
V1015840 (119905) + 119910119879 (119905) 119910 (119905) minus 1205742120596119879 (119905) 120596 (119905)le [120576119879 (119905) 120596119879 (119905)] Φ1 [120576119879 (119905) 120596119879 (119905)]119879+ (120578 (119905) minus 120578119898)sdot [120576119879 (119905) 120596119879 (119905)] 1198721119877minus12 1198721119879 [120576119879 (119905) 120596119879 (119905)]119879+ (1205781 minus 120578 (119905))sdot [120576119879 (119905) 120596119879 (119905)] 1198731119877minus12 1198731119879 [120576119879 (119905) 120596119879 (119905)]119879
(39)
where
8 Mathematical Problems in Engineering
Φ1 =
[[[[[[[[[[[[[[[[[[[[
Ξ1 1198771 + [1198802 (119860 + Δ119860)]119879 + 11987211 [1198803 (119860 + Δ119860)]119879 minus 11987311 [1198804 (119860 + Δ119860)]119879lowast minus1198771 + 11987212 + 11987212119879 11987213119879 minus 11987312 11987214119879lowast lowast minus1198773120572 minus 11987312 minus 11987312119879 1198773120572 minus 11987314119879lowast lowast lowast minus1198773120572lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
119875 minus 1198801 + [1198805 (119860 + Δ119860)]119879 Ψ1 + [1198806 (119860 + Δ119860)]119879 [1198807 (119860 + Δ119860)]119879 + [1198808 (119860 + Δ119860)]119879 + 1198801119867 0minus1198802 + 11987215119879 Ψ2 + 11987216119879 1198802119867 + 11987217119879 + 11987218119879 0minus1198803 minus 11987315119879 Ψ3 minus 11987316119879 1198803119867 minus 11987317119879 minus 11987318119879 0
minus1198804 Ψ4 1198804119867 012057811989821198771 + 120572 (1198772 + 1198773) minus 1198805 minus 1198805119879 Ψ5 minus 1198806119879 1198805119867 minus 1198807119879 minus 1198808119879 0
lowast Ψ6 Ξ2 0lowast lowast 1198807119867 + 1198808119867 + (1198807119867)119879 + (1198808119867)119879 0lowast lowast lowast minus1205742119868
]]]]]]]]]]]]]]]]]]]
Ξ1 = minus1198771 + 1198801 (119860 + Δ119860) + [1198801 (119860 + Δ119860)]119879 + 119862119879119862 + 1198781Ξ2 = [1198807 (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 + [1198808 (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 + 1198806119867 minus 11987217119879 minus 11987218119879 + 11987317119879
+ 11987318119879Ψ119894 = 119880119894 (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) + 1198731119894 minus 1198721119894 (119894 = 1 2 3 4 5) Ψ6 = 1198806 (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)
+ [1198806 (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 [Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 1198782Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) minus 11987216 minus 11987216119879 + 11987316+ 11987316119879
(40)
ifΦ1 + (120578 (119905) minus 120578119898) 1198721119877minus12 1198721119879
+ (1205781 minus 120578 (119905)) 1198731119877minus12 1198731119879 lt 0 (41)
Next we need to acquire the inequality (24) through atransformation based on inequality (41) which is equivalentto the following inequalities by applying the theory given inLemma 7 and the Schur complement also used byD Yue [38]in the previous study
[minus (1205781 minus 120578119898)minus1 1198772 1198721119879lowast Φ1 ] lt 0 (42)
[minus (1205781 minus 120578119898)minus1 1198772 1198731119879lowast Φ1 ] lt 0 (43)
Premultiplying and postmultiplying the inequalities above bydiag((1205781 minus 120578119898)119868 119868) we have
[minus1205721198772 Ω1119896lowast Φ1 ] lt 0 (44)
Applying the theory of the Schur complement to inequality(44) we have
[[[[[[[
minus (1198781 + 119862119879119862)minus1 0 0 lowast minus1198782minus1 0 Σlowast lowast minus1205721198772 Ω1119896lowast lowast lowast Φ10158401
]]]]]]]
lt 0 (45)
where
Mathematical Problems in Engineering 9
Φ11015840 =
[[[[[[[[[[[[[[[[[[[[
Ξ11015840 1198771 + [1198802 (119860 + Δ119860)]119879 + 11987211 [1198803 (119860 + Δ119860)]119879 minus 11987311 [1198804 (119860 + Δ119860)]119879lowast minus1198771 + 11987212 + 11987212119879 11987213119879 minus 11987312 11987214119879lowast lowast minus1198773120572 minus 11987312 minus 11987312119879 1198773120572 minus 11987314119879lowast lowast lowast minus1198773120572lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
119875 minus 1198801 + [1198805 (119860 + Δ119860)]119879 Ψ1 + [1198806 (119860 + Δ119860)]119879 [1198807 (119860 + Δ119860)]119879 + [1198808 (119860 + Δ119860)]119879 + 1198801119867 0minus1198802 + 11987215119879 Ψ2 + 11987216119879 1198802119867 + 11987217119879 + 11987218119879 0minus1198803 minus 11987315119879 Ψ3 minus 11987316119879 1198803119867 minus 11987317119879 minus 11987318119879 0minus1198804 Ψ4 1198804119867 0
12057811989821198771 + 120572 (1198772 + 1198773) minus 1198805 minus 1198805119879 Ψ5 minus 1198806119879 1198805119867 minus 1198807119879 minus 1198808119879 0lowast Ψ61015840 Ξ2 0lowast lowast 1198807119867 + 1198808119867 + (1198807119867)119879 + (1198808119867)119879 0lowast lowast lowast minus1205742119868
]]]]]]]]]]]]]]]]
Ξ11015840 = minus1198771 + 1198801 (119860 + Δ119860) + [1198801 (119860 + Δ119860)]119879Ψ61015840 = 1198806 (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) + [1198806 (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 minus 11987216 minus 11987216119879 + 11987316 + 11987316119879
Σ = [0 0 0 0 0 Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) 0 0]
(46)
Inequality (44) can be written as
[[[[[
minus (1198781 + 119862119879119862)minus1 0 0 lowast minus1198782minus1 0 Σlowast lowast minus1205721198772 Ω1119896lowast lowast lowast Φ101584010158401]]]]]
+ [[[[
000119863]]]]
119865 [[[[
000119864119879
]]]]
119879
+ [[[[
000119864119879
]]]]
119865119879[[[[[
000
]]]]]
119879
lt 0(47)
where
Φ110158401015840 =
[[[[[[[[[[[[[[[[[[[[
minus1198771 + 1198801119860 + (1198801119860)119879 1198771 + (1198802119860)119879 + 11987211 (1198803119860)119879 minus 11987311 (1198804119860)119879lowast minus1198771 + 11987212 + 11987212119879 11987213119879 minus 11987312 11987214119879lowast lowast minus1198773120572 minus 11987312 minus 11987312119879 1198773120572 minus 11987314119879lowast lowast lowast minus1198773120572lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
10 Mathematical Problems in Engineering
119875 minus 1198801 + (1198805119860)119879 Ψ110158401015840 + (1198806119860)119879 (1198807119860)119879 + (1198808119860)119879 + 1198801119867 0minus1198802 + 11987215119879 Ψ210158401015840 + 11987216119879 1198802119867 + 11987217119879 + 11987218119879 0minus1198803 minus 11987315119879 Ψ310158401015840 minus 11987316119879 1198803119867 minus 11987317119879 minus 11987318119879 0
minus1198804 Ψ41015840 1198804119867 012057811989821198771 + 120572 (1198772 + 1198773) minus 1198805 minus 1198805119879 Ψ510158401015840 minus 1198806119879 1198805119867 minus 1198807119879 minus 1198808119879 0
lowast Ψ610158401015840 Ξ210158401015840 0lowast lowast 1198807119867 + 1198808119867 + (1198807119867)119879 + (1198808119867)119879 0lowast lowast lowast minus1205742119868
]]]]]]]]]]]]]]]]]]]
Ξ210158401015840 = [1198807119861Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 + [1198808119861Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 + 1198806119867 minus 11987217119879 minus 11987218119879 + 11987317119879 + 11987318119879Ψ11989410158401015840 = 119880119894119861Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) + 1198731119894 minus 1198721119894 (119894 = 1 2 3 4 5)
Ψ61015840 = 1198806119861Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) + [1198806119861Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 minus 11987216 minus 11987216119879 + 11987316 + 11987316119879 = [1198641 0 0 0 0 1198642Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) 0 0]
(48)
With the definition of scalar 120576 gt 0 we apply the theory givenin Lemma 6 to (47) also used by Y Wang and L Xie [37]in which the uncertain matrix 119865 can be eliminated and asufficient condition of (47) is obtained
[[[[[[[
minus (1198781 + 119862119879119862)minus1 0 0 lowast minus1198782minus1 0 Σlowast lowast minus1205721198772 Ω1119896lowast lowast lowast Φ101584010158401
]]]]]]]
+ 120576 [[[[[[
01198630
]]]]]]
[[[[[[
01198630
]]]]]]
119879
+ 120576minus1[[[[[[[
000
119879
]]]]]]]
[[[[[[[
000
119879
]]]]]]]
119879
lt 0
(49)
Applying the Schur complement to inequality (49) we have
[[[[[[[[[[[[[[
minus120576119868 0 0 0 120576119879 0lowast minus (1198781 + 119862119879119862)minus1 0 0 0lowast lowast minus1198782minus1 0 Σ 0lowast lowast lowast minus1205721198772 Ω1119896 0lowast lowast lowast lowast Φ101584010158401 119879lowast lowast lowast lowast lowast minus120576119868
]]]]]]]]]]]]]]
lt 0
(50)
There exists 1205881 gt 0 1205882 gt 0 Based on (17) and Remark 3 inSection 2 we know that 119871119879119871 le 119868 and Γ119879Γ le 119868 According
to expressions (47) (49) and (50) we obviously know that1198805 gt 0 Using Lemma 6 again we have
Θ0 (119868 + Γ) 1198701198660119871 + [Θ0 (119868 + Γ) 1198701198660119871]119879le 1205881minus1Θ0 (119868 + Γ) 11987011986601198805minus1 [Θ0 (119868 + Γ) 1198701198660]119879
+ 12058811198805(51)
and
Θ0Γ1198701198660 + (Θ0Γ1198701198660)119879le 1205882minus1Θ0Θ0119879 + 1205882 (1198701198660)1198791198701198660
(52)
Based on inequalities (51) (52) and the Schur complementwe know inequality (24) is a sufficient condition of inequality(50) while inequality (50) is equivalent to inequality (41)Therefore we can undoubtedly obtain inequality (24) asa sufficient condition of inequality (41) Thus based oninequality (39) and (41) we know(1) if120596(119905) equiv 0 obviously we have V1015840(119905) lt 0 so system (21)is asymptotically stable(2) if 119909(0) equiv 0 we know V(0) = 0 In addition it can beobtained that V(infin) ge 0
Therefore
intinfin0
V1015840 (119905) + 119910119879 (119905) 119910 (119905) minus 1205742120596119879 (119905) 120596 (119905) 119889119905= V (infin) + intinfin
0119910119879 (119905) 119910 (119905) minus 1205742120596119879 (119905) 120596 (119905) 119889119905 lt 0
(53)
Thus
intinfin0
119910119879 (119905) 119910 (119905) lt intinfin0
1205742120596119879 (119905) 120596 (119905) 119889119905 (54)
Mathematical Problems in Engineering 11
Because 120596(119905) isin 1198712[0 infin) we have1003817100381710038171003817119910 (119905)1003817100381710038171003817 le 120574 120596 (119905)119879 (55)
It is known that model (21) is asymptotically stable with the119867infin norm bound 120574Moreover according to (39) and (41) we have
V1015840 (119905) le minus119909119879 (119905) 1198781119909 (119905)minus [Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) 119909 (119905 minus 120578 (119905))]119879
sdot 1198782Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) 119909 (119905 minus 120578 (119905))(56)
Through the integral operation it can be determined that119869 le V(0) In addition by inserting 119905 = 0 into the Lyapunov-Krasovskii function shown as expression (28) the upperbound of cost function 119869 can be obtained and shown asexpression (26) Therefore the theorem is verified if 119897 = 1Case 2 If 120578(119905) isin [1205781 120578119872] weighted technology based on theprinciple of Newton-Leibniz is introduced as follows
2 [120576119879 (119905) 120596119879 (119905)] 1198722 [119909 (119905 minus 1205781) minus 119909 (119905 minus 120578 (119905))minus int119905minus1205781119905minus120578(119905)
1199091015840119879 (119904) 119889119904] = 0(57)
2 [120576119879 (119905) 120596119879 (119905)] 1198732 [119909 (119905 minus 120578 (119905)) minus 119909 (119905 minus 120578119872)minus int119905minus120578(119905)119905minus120578119872
1199091015840119879 (119904) 119889119904] = 0(58)
Because 1198773 gt 0 we have
minus 2 [120576119879 (119905) 120596119879 (119905)] 1198722 int119905minus1205781119905minus120578(119905)
1199091015840 (119904) 119889119904 le (120578 (119905) minus 1205781)sdot [120576119879 (119905) 120596119879 (119905)] 1198722119877minus13 1198722119879 [120576119879 (119905) 120596119879 (119905)]119879+ int119905minus1205781119905minus120578(119905)
1199091015840119879 (119904) 11987731199091015840 (119904) 119889119904(59)
minus 2 [120576119879 (119905) 120596119879 (119905)] 1198732 int119905minus120578(119905)119905minus120578119872
1199091015840 (119904) 119889119904 le (120578119872 minus 120578 (119905))sdot [120576119879 (119905) 120596119879 (119905)] 1198732119877minus13 1198731119879 [120576119879 (119905) 120596119879 (119905)]119879+ int119905minus120578(119905)119905minus120578119872
1199091015840119879 (119904) 11987731199091015840 (119904) 119889119904(60)
Therefore
minus 2 [120576119879 (119905) 120596119879 (119905)] 1198722 int119905minus1205781119905minus120578(119905)
1199091015840 (119904) 119889119904
minus 2 [120576119879 (119905) 120596119879 (119905)] 1198732 int119905minus120578(119905)119905minus120578119872
1199091015840 (119904) 119889119904le (120578 (119905) minus 1205781)sdot [120576119879 (119905) 120596119879 (119905)] 1198722119877minus13 1198722119879 [120576119879 (119905) 120596119879 (119905)]119879+ (120578119872 minus 120578 (119905))sdot [120576119879 (119905) 120596119879 (119905)] 1198732119877minus13 1198732119879 [120576119879 (119905) 120596119879 (119905)]119879
+ int119905minus1205781119905minus120578119872
1199091015840119879 (119904) 11987731199091015840 (119904) 119889119904
(61)
In addition 119910119879(119905)119910(119905)minus1205742120596119879(119905)120596(119905) both on the left and rightsides of equality (29) and 119909119879(119905)1198781119909(119905) + [Θ0(119868 + Γ)1198701198660(119868 +119871)119909(119905minus120578(119905))]1198791198782Θ0(119868+Γ)1198701198660(119868+119871)119909(119905minus120578(119905)) on the right sideof equal sign ldquo=rdquo By inserting (30) (31) (57) (58) and (61)into the obtained inequality the item minus int119905minus1205781
119905minus1205781198721199091015840119879(119904)11987731199091015840(119904)119889119904
can be offset while the item minus int119905minus120578119898119905minus1205781
1199091015840119879(119904)11987721199091015840(119904)119889119904 is offsetin Case 1 Then in the same methods of transformation asCase 1 the inequality (24) when 119897 = 2 can be obtainedTherefore the proof is complete
Remark 9 In the two different cases a variational weightingmatrix and Jessenrsquos inequalities are used to derive the 119867infinguaranteed cost fault-tolerant condition of the system inwhich more delay information is employed to reduce theconservatism
The next section will provide sufficient conditions fordesigning the guaranteed cost fault-tolerant control for adouble-fault NCS
4 Guaranteed Cost Fault-Tolerant Control ofDouble-Fault NCS
Inequality (24) is not linear with respect to the gain matricesof the controller so it is needs to be reformulated into LMIsvia a change of variables
Theorem 10 Given symmetric positive definite matrices 1198781and 1198782 a set of constant 120578119898 120578119872 1205881 gt 0 1205882 gt 0 120582119894 (119894 = from1 to 7) and 120572 = (120578119872 minus 120578119898)2 If there exists a set of symmetricpositive definite matrices 119895 (119895 = 1 2 3)119883 andmatrix gt 0as well as matrices 1120573 2120573 1120573 2120573 (120573 =from 1 to 8)
12 Mathematical Problems in Engineering
119884 and a set of constants 120576 gt 0 and 120583 gt 0 satisfying theLMIs
[[[[[[[[[[[[[[[[[[[[[[[[[[
minus120576119868 0 0 0 120576119863119879lowast minus (1198781 + 119862119879119862)minus1 0 0 Πlowast lowast minus1198782minus1 0 Σlowast lowast lowast minusΓ119897 Ω119897119896lowast lowast lowast lowast Φ119897lowast lowast lowast lowast lowastlowast lowast lowast lowast lowastlowast lowast lowast lowast lowastlowast lowast lowast lowast lowastlowast lowast lowast lowast lowast
0 0 0 0 00 0 0 0 00 Θ0119884 0 Θ0 00 0 0 0 0
119864119879 Θ 119883 Δ 119884119879minus120576119868 1198642Θ0119884 0 1198642Θ0 0lowast minus1205881119883119879 0 0 119884119879lowast lowast minus1205881minus1119883 0 0lowast lowast lowast minus1205882119868 0lowast lowast lowast lowast minus1205882minus1119868
]]]]]]]]]]]]]]]]]]]]]]
lt 0
119897 = 1 2 119896 = 1 2(62)
where
Φ1 =
[[[[[[[[[[[[[[[[[[[[[
minus1 + 1205821119860119883119879 + 1205821119883119860119879 1 + 1205822119883119860119879 + 11 1205823119883119860119879 minus 11 1205824119883119860119879lowast minus1 + 12 + 12119879 13119879 minus 12 14119879lowast lowast minus3120572 minus 12 minus 12119879 3120572 minus 14119879lowast lowast lowast minus3120572lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
minus 1205821119883119879 + 119883119860119879 Ψ1 + 1205825119883119860119879 1205826119883119860119879 + 1205827119883119860119879 + 1205821119867119883119879 0minus1205822119883119879 + 15119879 Ψ2 + 16119879 1205822119867119883119879 + 17119879 + 18119879 0minus1205823119883119879 minus 15119879 Ψ3 minus 16119879 1205823119867119883119879 minus 17119879 minus 18119879 0
minus1205824119883119879 Ψ4 1205824119867119883119879 012057811989821 + 120572 (2 + 3) minus 119883119879 minus 119883 Ψ5 minus 1205825119883 119867119883119879 minus 1205826119883 minus 1205827119883 0
lowast Ψ6 Ξ 0lowast lowast 1205826119867119883119879 + 1205827119867119883119879 + 1205826119883119867119879 + 1205827119883119867119879 0lowast lowast lowast minus120583119868
]]]]]]]]]]]]]]]]]
Φ2 =
[[[[[[[[[[[[[[[[[[[[[
minus1 + 1205821119860119883119879 + 1205821119883119860119879 1 + 1205822119883119860119879 1205823119883119860119879 + 21 1205824119883119860119879 minus 21lowast minus1 minus 2120572 2120572 + 22 minus22lowast lowast minus2120572 + 23 + 23119879 24119879 minus 23lowast lowast lowast minus24 minus 24119879lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
Mathematical Problems in Engineering 13
minus 1205821119883119879 + 119883119860119879 Ψ11015840 + 1205825119883119860119879 1205826119883119860119879 + 1205827119883119860119879 + 1205821119867119883119879 0minus1205822119883119879 Ψ21015840 1205822119867119883119879 0
minus1205823119883119879 + 25119879 Ψ31015840 + 26119879 1205823119867119883119879 + 27119879 + 28119879 0minus1205824119883119879 minus 25119879 Ψ41015840 minus 26119879 1205824119867119883119879 minus 27119879 minus 28119879 0
12057811989821 + 120572 (2 + 3) minus 119883 minus 119883119879 Ψ51015840 minus 1205825119883 119867119883119879 minus 1205826119883 minus 1205827119883 0lowast Ψ61015840 Ξ1015840 0lowast lowast 1205826119867119883119879 + 1205827119867119883119879 + 1205826119883119867119879 + 1205827119883119867119879 0lowast lowast lowast minus120583119868
]]]]]]]]]]]]]]]]]]]]]
Γ1 = 1205721198772Γ1 = 1205722Γ2 = 1205723
Ω11 = 1205721119879Ω12 = 1205721119879Ω21 = 1205722119879Ω22 = 1205722119879
1119879 = [11119879 12119879 13119879 14119879 15119879 16119879 17119879 18119879] 2119879 = [21119879 22119879 23119879 24119879 25119879 26119879 27119879 28119879]
1119879 = [11119879 12119879 13119879 14119879 15119879 16119879 17119879 18119879] 1198732119879 = [21119879 22119879 23119879 24119879 25119879 26119879 27119879 28119879]
Ξ = 1205826 (119861Θ0119884)119879 + 1205827 (119861Θ0119884)119879 + 1205825119867119883119879 minus 17119879 minus 18119879 + 17119879 + 18119879Ψ119894 = 120582119894119861Θ0119884 + 1119894 minus 1119894 (119894 = 1 2 3 4)
Ψ5 = 119861Θ0119884 + 1119894 minus 1119894Ψ6 = 1205825119861Θ0119884 + 1205825 (119861Θ0119884)119879 minus 11987216 minus 11987216119879 + 11987316 + 11987316119879
Ξ1015840 = 1205826 (119861Θ0119884)119879 + 1205827 (119861Θ0119884)119879 + 1205825119867119883119879 minus 27119879 minus 28119879 + 27119879 + 28119879Ψ1198941015840 = 120582119894119861Θ0119884 + 2119894 minus 2119894 (119894 = 1 2 3 4)
Ψ51015840 = 119861Θ0119884 + 2119894 minus 2119894Ψ61015840 = 1205825119861Θ0119884 + 1205825 (119861Θ0119884)119879 minus 26 minus 26119879 + 26 + 26119879
119863 = [1205821119863119879 1205822119863119879 1205823119863119879 1205824119863119879 119863119879 1205825119863119879 1205826119863119879 + 1205827119863119879 0]119879 119864 = [1198641119883119879 0 0 0 0 1198642Θ0119884 0 0]
119883 = [0 0 0 0 0 119883119879 0 0]119879 Π = [119883119879 0 0 0 0 0 0 0]
14 Mathematical Problems in Engineering
Θ = [(1205821119861Θ0119884)119879 (1205822119861Θ0119884)119879 (1205823119861Θ0119884)119879 (1205824119861Θ0119884)119879 (119861Θ0119884)119879 (1205825119861Θ0119884)119879 (1205826119861119884)119879 + (1205827119861119884)119879 0]119879 Δ = [(1205821119861Θ0)119879 (1205822119861Θ0)119879 (1205823119861Θ0)119879 (1205824119861Θ0)119879 (119861Θ0)119879 (1205825119861Θ0)119879 (1205826119861Θ0)119879 + (1205827119861Θ0)119879 0]119879
119884 = [0 0 0 0 0 119884 0 0] Σ = [0 0 0 0 0 Θ0119884 0 0]
(63)
then the 119867infin guaranteed cost control gain 119870 = 119884119883minus1198791198660minus1 canrendermodel (21) to be asymptotically stable with the119867infin normbound 120574 = radic120583 13e upper bound 1198690 of cost function 119869 is givenas
1198690 = 119909119879 (0) 119883minus1119883minus119879119909 (0)+ 120578119898 int0
minus120578119898
int0119904
1199091015840119879 (120591) 119883minus11119883minus1198791199091015840 (120591) 119889119904119889120591+ intminus120578119898minus1205781
int0119904
1199091015840119879 (120591) 119883minus12119883minus1198791199091015840 (120591) 119889119904119889120591+ intminus1205781minus120578119872
int0119904
1199091015840119879 (120591) 119883minus13119883minus1198791199091015840 (120591) 119889119904119889120591
(64)
Proof The proof is based on a suitable transformation anda change of variables allowing us to obtain inequality (24)in Theorem 8 First we define 1198805 = 1198800 119880119894 = 1205821198941198800 (119894 =from 1 to 4) 1198806 = 12058251198800 in (24) Because we consider thedimension of state119909is equal to that of outside disturbance120596 in this paper we can also define 1198807 = 12058261198800 1198808 =12058271198800 Obviously (24) implies 1198805 gt 0 so 1198800 is nonsingularThen using the analysis method of D Yue [40] and Z Wang[41] pre- and postmultiplying both sides of inequality (24)with diag(119868 119868 119868 119883 119868 119883 119868 119868 119868) and its transpose where = diag(119883 119883 119883 119883 119883 119883 119883 119883) and 119883 = 1198800minus1 introducingnew variables 119883119875119883119879 = 119883119877119895119883119879 = 119895 (119895 = 1 2 3)119883119872119897120573119883119879 = 119897120573 119883119873119897120573119883119879 = 119897120573 (119897 = 1 2 120573 = 1 2 sdot sdot sdot 8)1198701198660119883119879 = 119884 and 120583 = 1205742 From the definition of 1198660 we know1198660 is invertible so 119870 can be obtained by calculating 119870 =119884119883minus1198791198660minus1 It is easy to see that 10 and (64) respectively imply(24) and (26) Therefore from Theorem 8 we can completethe proof
To obtain the optimal bound 119869lowast shown in (26) thecommonly used method is to consider it as an optimizationproblem like [42] in which the expression of initial state 119909(119905)(119905 isin [minus120578119872 0]) needs to be known The expression of initialstate is not given in this paper Therefore the optimizationmethod used in [42] cannot be used here A practical methodto obtain 119869lowast also used by D Yue [43] is employed as follows
Suppose 1199091015840(119905) is bounded if 119905 isin [minus120578119872 0] and satisfying1199091015840119879(120591)1199091015840(120591) le ℓ In addition suppose that there exists 120573119894 gt0 (119894 = 1 2 3) satisfying119883minus1119894119883minus119879 le 120573119894119868 119894 = 1 2 3119883minus1119883minus119879 le 1205734119868 (65)
Inserting this into (64) we have
1198690 le 1205734119909119879 (0) 119909 (0) + 05ℓ12057311205781198983 + 05ℓ1205732 (12057812 minus 1205781198982)+ 05ℓ1205733 (1205781198722 minus 12057812) = 119869lowast (66)
Applying the Schur complement to the inequalities above wehave
[minus120573119894119868 119883minus1lowast minus119877119894minus1] lt 0 119894 = 1 2 3
[minus1205734119868 119883minus1lowast minus119875minus1] lt 0
(67)
Then combining 10 and (67) 119894minus1 119894 (119894 = 1 2 3)minus1 119883minus1 119883 exist simultaneously We cannot directly usethe LMI tools to solve the problem Defining 119894minus1 = 119894(119894 = 1 2 3) minus1 = 119883minus1 = and using the idea of thecone complementary linearization algorithm the guaranteedcost fault-tolerant controller of system (21) and the value ofoptimal performance indicator 119869lowast can be obtained in thefollowing method
Minimize 119905119903119886119888119890 (11 + 22 + 33 + + )+ 1205734 + 0512057311205781198983 + 051205732 (12057812 minus 1205781198982)+ 051205733 (1205781198722 minus 12057812)
Subject to 119868119899119890119902119906119886119897119894119905119894119890119904 (62) [minus120573119894119868
lowast minus119894] lt 0 (119894 = 1 2 3)
[minus1205734119868 lowast minus] lt 0
[119883 119868lowast ] ge 0
[1 119868lowast 1] ge 0
[2 119868lowast 2] ge 0
Mathematical Problems in Engineering 15
[3 119868lowast 3] ge 0
[ 119868lowast ] ge 0
119894 gt 0 (119894 = 1 2 3) (68)
5 Simulations
Example 11 Consider inverted pendulum model that canusually be modelled as (1) and the system parameters aregiven as follows
119860 = [minus2 1110 4 ]
119861 = [01minus4]
119862 = [minus03151 01011 03]
119867 = [015 minus056minus01 032 ]
Δ119860 = [004 sin 119905 015 sin 119905minus02 sin 119905 075 sin 119905]
Δ119861 = [002 sin 119905minus01 sin 119905]
119863 = [ 01minus05]
119865 (119905) = sin 119905
(69)
Therefore we have
1198641 = [04 15] 1198642 = 02 (70)
For this simulation the initial state of system is assumed119909(0) = [2 minus1]119879 and the external disturbance is considered as120596(119905) = [015 minus05]119879 3119904 le 119905 le 4119904
0 119900119905ℎ119890119903119904 Here we take the upper
bound of time-varying delay as 120578119872 = 03119904 and its lower boundas 120578119898 = 0119904 namely 0 le 120578(119905) le 03 In addition the faultbounds of the system are given in Table 1
Table 1 The bounds of faults
Symbol Upper bound Lower boundActuatorfaultsΘ 136 009
SensorFaults119866
[[
165 00 175]
][[
0 00 015]
]
minus01
0
01
02
03
04
05
Del
ay
1 2 3 4 5 60Time s
Figure 2 The time-varying delay in double-fault NCS
We choose the parameters as follows
1205821 = 011205822 = 0151205823 = minus0641205824 = 031205825 = 1205826 = 0351205827 = 181198782 = 0311205881 = 30001205882 = 22032ℓ = 1
1198781 = [10013 00 9207]
(71)
By taking advantage of the LMI tool box and inserting theabove parameters into inequalities 10 and (68) we can obtainthe 119867infin guaranteed cost control gain
119870 = 119884119883minus1198791198660minus1 = [85163 151398] (72)
with 120574 = radic120583 = 1952516The corresponding optimal performance indicator (the
upper bound value of guaranteed cost function) is 119869lowast =83162563The time-varying delay is shown in Figure 2 In Figure 3
(a) is the actuator fault which is a piecewise-linear function
16 Mathematical Problems in Engineering
002040608
1121416
Actu
ator
faul
t
1 2 3 4 5 60Time s
(a) Time-varying actuator fault
minus020
02040608
112141618
Sens
or fa
ult
1 2 3 4 5 60Time s
(b) Time-varying sensor fault
Figure 3 The time-varying faults
x1
x2
1 2 3 4 5 60Time s
minus15
minus1
minus05
0
05
1
15
2
Stat
e X
Figure 4 The state response curve of double-fault NCS
1 2 3 4 5 60Time s
minus8minus7minus6minus5minus4minus3minus2minus1
012
Con
trol i
nput
Figure 5 The control input of double-fault NCS
It keeps the minimum value from 13119904 to 17119904 while it keepsthe maximum value from 37119904 to 43119904 The sensor faults areshown as (b) which is sinusoidal It should be noted thatthe green dotted line represents the fault of sensor 1 whilethe blue solid line represents the fault of sensor 2 Throughthe state response of the double-fault NCS shown in Figure 4and corresponding control signal shown in Figure 5 we know
x1
x2
1 2 3 4 5 60Time s
minus8
minus6
minus4
minus2
0
2
4
6
Stat
e X
Figure 6 The state response curve of double-fault NCS
the 119867infin guaranteed cost controller designed in this paper isable to make the double-fault NCS asymptotically stable Thesystem gets preliminarily steady at 2119904 and its state can returnto the equilibrium position in a certain period of time whenthe NCS is affected by external disturbance Compared withthe state response of worse stability shown in Figure 6 whenthe method proposed in [28] is used for this double-faultproblem it sufficiently proves the effectiveness and feasibilityof the method proposed in this paper
To better illustrate the effectiveness of the method pro-posed in this paper the following example is presented
Example 12 Consider the parameters of system (1) as follows
119860 = [[[[[[
021 0 035 10 minus53 minus586 323
365 minus11 minus156 minus0890 0 minus158 minus285
]]]]]]
119861 = [559 12 minus089 13]119879 119862 = [17 02 015 minus018]
Mathematical Problems in Engineering 17
minus15
minus1
minus05
0
05
1
15
Stat
e X1 2 3 4 5 6 7 8 9 100
Time s
R1R2
R3R4
Figure 7 The state response curve of double-fault NCS
Δ119860 = [[[[
082 sin 119905 0 0 00 012 sin 119905 0 00 0 minus058 sin 119905 00 0 0 101 sin 119905]]]]
Δ119861 = [[[[
minus015 sin 119905008 sin 1199050minus028 sin 119905]]]]
119867 = [[[[
minus041 096 052 0006 minus057 0 021121 0 059 0minus032 minus011 minus035 minus003]]]]
119863 = 1198684times4119865 (119905) = diag (sin 119905 sin 119905 sin 119905 sin 119905)
(73)
Therefore we have
1198641 = diag (082 012 minus058 101) 1198642 = [minus015 008 0 minus028]119879 (74)
For this simulation the initial state of system is assumedas 119909(0) = [121 minus051 023 minus018]119879 and the externaldisturbance is considered as
120596 (119905) = [015 cos 119905 015 cos 119905 minus012 sin 119905 minus025 cos 119905]119879 6119904 le 119905 le 81199040 119900119905ℎ119890119903119904 (75)
The uncertain time-varying delay satisfies 0 le 120578(119905) le023119904 In addition the fault bounds of the system are givenin Table 2 Other parameters are selected as follows
1205821 = 121205822 = minus2031205823 = 1681205824 = minus231205825 = minus1051205826 = 6051205827 = 5121198781 = diag (19888 15634 8709 12876) 1198782 = 586
1205881 = 57981205882 = 1879ℓ = 1
(76)
By taking advantage of the LMI tool box and submittingthese parameters above into inequalities 10 and (68) we canobtain the 119867infin guaranteed cost control gain
119870 = 119884119883minus1198791198660minus1= [minus17256 15512 minus08571 07451]
with 120574 = radic120583 = 5819806(77)
The corresponding optimal performance indicator is 119869lowast =65021047 From the state response shown in Figure 7 andcontrol signal shown in Figure 8 we undoubtedly know
18 Mathematical Problems in Engineering
Table 2 The bounds of faults
Symbol Upper bound Lower boundActuatorfaultsΘ 150 012
SensorFaults119866
[[[[[[[[
185 0 0 00 160 0 00 0 125 00 0 0 165
]]]]]]]]
[[[[[[[[
025 0 0 00 0 0 00 0 0 00 0 0 015
]]]]]]]]
minus4
minus3
minus2
minus1
0
1
2
Con
trol i
nput
1 2 3 4 5 6 7 8 9 100Time s
Figure 8 The control input of double-fault NCS
the double-fault NCS is asymptotically stable when the 119867infinguaranteed cost controller is used This further demonstratesthe feasibility and effectiveness of the method proposed inthis paper
6 Conclusions
The issues of modelling and 119867infin guaranteed cost fault-tolerant control of double-fault networked control systemshave been addressedThe closed-loopmodel of a double-faultNCS is set up with regard to the influences of transmissiondelay packet dropout uncertain parameters and externaldisturbance In addition the piecewise delay method is pro-posed to reduce the conservatism when analysing the delay-dependent faulty system With the help of Lee Y Srsquos lemmathe sufficient condition of guaranteed cost fault-tolerantfor time-varying double-fault NCS is introduced using theLyapunov-Krasovskii theory and weighted technology Themethod of designing a guaranteed cost fault-tolerant con-troller for this NCS is given based on LMI Our next researchtask will be choosing more reasonable values of parameters120582119894 (119894 = 1 2 3 4 5 6 7) to reduce the conservatism further Ofcourse the study on scheduling policy of double-fault NCS isalso a challenge but indispensable work
Data Availability
The data used in this paper can be got by simulations
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was partly supported by National Nature Sci-ence Foundation of China under Grants 51875380 51375323and 61563022 Cooperative Innovation Fund-Prospective ofJiangsu Province under Grant BY2016044-01Major Programof Natural Science Foundation of Jiangxi Province Chinaunder Grant 20152ACB20009 High Level Talents of ldquoSix Tal-ent Peaksrdquo in Jiangsu Province China under Grant DZXX-046
References
[1] H Zhang Y Shi J Wang and H Chen ldquoA New Delay-compensation Scheme for Networked Control Systems inController Area Networksrdquo IEEE Transactions on IndustrialElectronics vol 65 no 9 pp 7239ndash7247 2018
[2] A Da Silva and C Kawan ldquoRobustness of critical bit rates forpractical stabilization of networked control systemsrdquo Automat-ica vol 93 pp 397ndash406 2018
[3] Q Zhu K Lu and Y Zhu ldquoGuaranteed cost control ofnetworked control systems under transmission control protocolwith active queue managementrdquo Asian Journal of Control vol18 no 4 pp 1546ndash1557 2016
[4] Q Zhu K Lu and Y Zhu ldquoHinfin Guaranteed Cost Control forNetworked Control Systems under Scheduling Policy Based onPredicted Errorrdquo Mathematical Problems in Engineering vol2014 Article ID 586029 12 pages 2014
[5] W H Chen J X Xu and Z H Guan ldquoGuaranteed cost controlfor uncertain Markovian jump systems with mode-dependenttime-delaysrdquo IEEE Transactions on Automatic Control vol 48no 12 pp 2270ndash2277 2003
[6] HM Soliman A DabroumM S Mahmoud andM SolimanldquoGuaranteed-cost reliable control with regional pole placementof a power systemrdquo Journal of 13e Franklin Institute vol 348no 5 pp 884ndash898 2011
[7] X Li and X-B Wu ldquoGuaranteed cost fault-tolerant controllerdesign of networked control systems under variable-periodsamplingrdquo Information Technology Journal vol 8 no 4 pp 537ndash543 2009
[8] L Zhang and G Orosz ldquoMotif-Based Design for ConnectedVehicle Systems in Presence of Heterogeneous ConnectivityStructures and Time Delaysrdquo IEEE Transactions on IntelligentTransportation Systems vol 17 no 6 pp 1638ndash1651 2016
[9] Z Li G Guo and Z Liu ldquoCommunication parameter designfor networked control systems with the slotted ALOHA accessprotocolrdquo Information Sciences vol 447 pp 205ndash215 2018
[10] K Lu G Jing and L Wang ldquoDistributed algorithm for solv-ing convex inequalitiesrdquo Institute of Electrical and ElectronicsEngineers Transactions on Automatic Control vol 63 no 8 pp2670ndash2677 2018
[11] Q Zhu K Lu and Y Zhu ldquoObserver-based feedback controlof networked control systems with delays and packet dropoutsrdquoJournal of Dynamic SystemsMeasurement andControl vol 138no 2 pp 1ndash8 2016
Mathematical Problems in Engineering 19
[12] Y Li H Li and W Sun ldquoEvent-triggered control for robust setstabilization of logical control networksrdquo Automatica vol 95pp 556ndash560 2018
[13] X Luan P Shi and F Liu ldquoStabilization of networked controlsystems with random delaysrdquo IEEE Transactions on IndustrialElectronics vol 58 no 9 pp 4323ndash4330 2011
[14] Y Zhang and J Jiang ldquoBibliographical review on reconfigurablefault-tolerant control systemsrdquo Annual Reviews in Control vol32 no 2 pp 229ndash252 2008
[15] N H Ei-Farra A Gani and P D Christofides ldquoFault-tolerantcontrol of process systems using communication networksrdquoAIChE Journal vol 51 no 6 pp 1665ndash1682 2005
[16] H R Karimi and H Gao ldquoNew delay-dependent exponentialHinfin synchronization for uncertain neural networks withmixedtime delaysrdquo IEEE Transactions on Systems Man and Cybernet-ics Part B Cybernetics vol 40 no 1 pp 173ndash185 2010
[17] Y N Guo Q Y Zhang D W Gong and J H Zhang ldquoRobustfault-tolerant control of networked control systems with time-varying delaysrdquoControl andDecision vol 23 no 6 pp 689ndash6922008
[18] Z Mao and B Jiang ldquoFault identification and fault-tolerantcontrol for a class of networked control systemsrdquo InternationalJournal of Innovative Computing Information and Control vol3 no 5 pp 1121ndash1130 2007
[19] C-X Yang Z-H Guan and J Huang ldquoStochastic fault tolerantcontrol of networked control systemsrdquo Journal of 13e FranklinInstitute vol 346 no 10 pp 1006ndash1020 2009
[20] Z Mao Y Pan B Jiang and W Chen ldquoFault Detectionfor a Class of Nonlinear Networked Control Systems withCommunication Constraintsrdquo International Journal of ControlAutomation and Systems vol 16 no 1 pp 256ndash264 2018
[21] A Qiu J Gu C Wen and J Zhang ldquoSelf-triggered faultestimation and fault tolerant control for networked controlsystemsrdquo Neurocomputing vol 272 no 1 pp 629ndash637 2018
[22] Q Zhu K Lu G Xie and Y Zhu ldquoGuaranteed Cost Fault-Tolerant Control for Networked Control Systems with SensorFaultsrdquoMathematical Problems in Engineering vol 2015 ArticleID 549347 9 pages 2015
[23] W Wu and Y Zhang ldquoEvent-triggered fault-tolerant controland scheduling codesign for nonlinear networked control sys-tems with medium-access constraint and packet disorderingrdquoInternational Journal of Robust and Nonlinear Control vol 28no 4 pp 1182ndash1198 2018
[24] X Xiao and X-J Li ldquoAdaptive dynamic programming method-based synchronisation control of a class of complex dynamicalnetworks with unknown dynamics and actuator faultsrdquo IETControl 13eory amp Applications vol 12 no 2 pp 291ndash298 2018
[25] PMhaskar AGani CMcFall PDChristofides and J FDavisldquoFault-tolerant control of nonlinear process systems subject tosensor faultsrdquo AIChE Journal vol 53 no 3 pp 654ndash668 2007
[26] M Liu P Shi L Zhang and X Zhao ldquoFault-tolerant controlfor nonlinear Markovian jump systems via proportional andderivative sliding mode observer techniquerdquo IEEE Transactionson Circuits and Systems I Regular Papers vol 58 no 11 pp2755ndash2764 2011
[27] S Li D Sauter C Aubrun and J Yame ldquoStability guaranteedactive fault-tolerant control of networked control systemsrdquoJournal of Control Science and Engineering vol 2008 Article ID189064 9 pages 2008
[28] X Y Luo M J Shang C L Chen and X P Guan ldquoGuaranteedcost active fault-tolerant control of networked control system
with packet dropout and transmission delayrdquo InternationalJournal of Automation and Computing vol 7 no 4 pp 509ndash5152010
[29] Q Zhu B Xie and Y Zhu ldquoGuaranteed Cost Control forMultirate Networked Control Systems with Both Time-Delayand Packet-Dropoutrdquo Mathematical Problems in Engineeringvol 2014 Article ID 637329 9 pages 2014
[30] R Manivannan R Samidurai J Cao and M Perc ldquoDesign ofResilient Reliable Dissipativity Control for Systems with Actu-ator Faults and Probabilistic Time-Delay Signals via Sampled-Data Approachrdquo IEEE Transactions on Systems Man andCybernetics Systems 2018
[31] R Manivannan R Samidurai J Cao A Alsaedi and F EAlsaadi ldquoNon-Fragile Extended Dissipativity Control Designfor Generalized Neural Networks with Interval Time-DelaySignalsrdquo Asian Journal of Control 2019
[32] Q Gao and N Olgac ldquoBounds of imaginary spectra of LTIsystems in the domain of two of the multiple time delaysrdquoAutomatica vol 72 pp 235ndash241 2016
[33] Q Gao A S Kammer U Zalluhoglu and N Olgac ldquoCriticaleffects of the polarity change in delayed states within anLTI dynamics with multiple delaysrdquo Institute of Electrical andElectronics Engineers Transactions onAutomatic Control vol 60no 11 pp 3018ndash3022 2015
[34] Q Gao Z Zhang and C Yang ldquoSign inverting control andits important properties for multiple time-delayed systemsrdquo inProceedings of the 10th ASME Dynamic Systems and ControlConference pp 979ndash984 Virginia USA 2017
[35] Y M Zhang and J Jiang ldquoActive fault-tolerant control systemagainst partial actuator failuresrdquo IEE Proceedings Control13eoryand Applications vol 149 no 1 pp 95ndash104 2002
[36] G Garcia J Bernussou andD Arzelier ldquoRobust stabilization ofdiscrete-time linear systems with norm-bounded time-varyinguncertaintyrdquo Systems amp Control Letters vol 22 no 5 pp 327ndash339 1994
[37] Y Wang L Xie and C E de Souza ldquoRobust control of a classof uncertain nonlinear systemsrdquo Systems amp Control Letters vol19 no 2 pp 139ndash149 1992
[38] D Yue E Tian and Y Zhang ldquoA piecewise analysis methodto stability analysis of linear continuousdiscrete systems withtime-varying delayrdquo International Journal of Robust and Non-linear Control vol 19 no 13 pp 1493ndash1518 2009
[39] X-J Jing D-L Tan and Y-C Wang ldquoAn LMI approach tostability of systems with severe time-delayrdquo IEEE Transactionson Automatic Control vol 49 no 7 pp 1192ndash1195 2004
[40] D Yue Q-L Han and J Lam ldquoNetwork-based robust Hinfincontrol of systems with uncertaintyrdquo Automatica vol 41 no 6pp 999ndash1007 2005
[41] Z Wang F Yang D W C Ho and X Liu ldquoRobust Hinfincontrol for networked systemswith randompacket lossesrdquo IEEETransactions on Systems Man and Cybernetics Part B vol 37no 4 pp 916ndash924 2007
[42] M S Mahmoud ldquoControl of uncertain state-delay systemsguaranteed cost approachrdquo IMA Journal of Mathematical Con-trol and Information vol 18 no 1 pp 109ndash128 2001
[43] D Yue C Peng andG Y Tang ldquoGuaranteed cost control of lin-ear systems over networks with state and input quantisationsrdquoIEE Proceedings Control 13eory and Applications vol 153 no 6pp 658ndash664 2006
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Mathematical Problems in Engineering 3
119892119906119894 gt 1 while its lower bound is denoted by a constant 119892119897119894satisfying 0 le 119892119897119894 lt 1
Denoting 119909119865(119905) = [1199091198651 (119905) 1199091198652 (119905) sdot sdot sdot 119909119865119899 (119905)]119879 we have119909119865 (119905) = 119866 (119905) 119909 (119905) (4)
where 119866(119905) = diag(1198921(119905) 1198922(119905) sdot sdot sdot 119892119899(119905)) is the sensor faultindicator matrix Correspondingly its upper bound matrix is119866119906 = diag(1198921199061 1198921199062 sdot sdot sdot 119892119906119899) and its lower bound matrix is119866119897 = diag(1198921198971 1198921198972 sdot sdot sdot 119892119897119899)
Data packet dropouts in NCS are also unavoidablebecause of limited bandwidth Considering that data packetdropouts may occur the network is modelled as a switchWhen the switch is located in 1198781 position the data packetcontaining 119909(119905119896) is transmitted and the controller utilizes theupdated data When it is located in the 1198782 position the datapacket dropouts occur and the controller uses the old dataFor a fixed sampling period ℎ the dynamics of the switch canbe expressed as follows
The NCS with no packet dropout at time 119905119896 (119905) = 119866 (119905119896 minus 120591119904119888) 119909 (119905119896 minus 120591119904119888) (5)
The NCS with one packet dropout at time 119905119896 (119905) = 119866 (119905119896 minus 120591119904119888 minus ℎ) 119909 (119905119896 minus 120591119904119888 minus ℎ) (6)
The NCS with 119889119896 isin 119885+ packet dropout at time 119905119896 (119905) = 119866 (119905119896 minus 120591119904119888 minus 119889119896ℎ) 119909 (119905119896 minus 120591119904119888 minus 119889119896ℎ) (7)
Because the feedback controller is static (2) can be expressedas
119906 (119905)= 119870119866 (119905119896 minus 120591119888119886 minus 120591119904119888 minus 119889119896ℎ) 119909 (119905119896 minus 120591119888119886 minus 120591119904119888 minus 119889119896ℎ) (8)
Considering that actuator faults may also occur 119906119865119895 (119905) isused to represent the signal from the 119895-th actuator Similarlywe denote the actuator fault model as
119906119865119894 (119905) = 120575119895 (119905) 119906119895 (119905) 119895 = 1 2 sdot sdot sdot 119898 (9)
where 120575119895(119905) is the time-varying actuator efficiency factor 120575119895 =1 represents that the 119895-th actuator is normal 120575119895 = 0 representsthat its fault is an outage and 0 lt 120575119895 lt 1 or 120575119895 gt 1 denotes thatits fault is a loss of effectiveness The upper bound of sensorefficiency factor 120575119895(119905) is denoted by a constant 120575119906119895 satisfying120575119906119895 gt 1 while its lower bound is denoted by a constant 120575119897119895satisfying 0 le 120575119897119895 lt 1
Denoting the faulty control signal 119906119865(119905) =[1199061198651 (119905) 1199061198652 (119905) sdot sdot sdot 119906119865119898(119905) ]119879 we can obtain the fault-tolerantcontrol law as
119906119865 (119905) = Θ (119905) 119906 (119905) = Θ (119905) 119870119866 (119905119896 minus 120591119888119886 minus 120591119904119888 minus 119889119896ℎ)sdot 119909 (119905119896 minus 120591119888119886 minus 120591119904119888 minus 119889119896ℎ) (10)
whereΘ(119905) = diag(1205751(119905) 1205752(119905) sdot sdot sdot 120575119898(119905)) is the actuator faultindicator matrix Correspondingly its upper bound matrix is
Θ119906 = diag(1205751199061 1205751199062 sdot sdot sdot 120575119906119898) and its lower bound matrix isΘ119897 = diag(1205751198971 1205751198972 sdot sdot sdot 120575119897119898)Let 120578(119905) = 119905 minus 119905119896 + 120591119888119886 + 120591119904119888 + 119889119896ℎ 119905 isin [119905119896 119905119896+1) (10) can
now be expressed as follows
119906119865 (119905) = Θ (119905) 119906 (119905) = Θ (119905) 119870119866 (119905 minus 120578 (119905)) 119909 (119905119896 minus 120578 (119905)) (11)
Obviously the delay part 120578(119905) may vary with time 119905 and itsatisfies
120578119898 le 120578 (119905) = 119905 minus 119905119896 + 120591119888119886 + 120591119904119888 + 119889119896ℎ le 120578119872119905 isin [119905119896 119905119896+1) (12)
From the upper bounds119866119906 Θ119906 of fault indicator matricesand lower bounds 119866119897 Θ119897 of fault indicator matrices thenonsingular mean-value matrices are separately obtained as
1198660 = diag (11989201 11989202 sdot sdot sdot 1198920119899) 1198920119894 = 119892119906119894 + 1198921198971198942Θ0 = diag (12057501 12057502 sdot sdot sdot 1205750119898) 1205750119895 = 120575119906119895 + 1205751198971198952
(13)
Moreover the following two time-varying matrices areintroduced
119871 (119905 minus 120578 (119905))= diag (1198971 (119905 minus 120578 (119905)) 1198972 (119905 minus 120578 (119905)) sdot sdot sdot 119897119899 (119905 minus 120578 (119905)))
119897119894 (120578 (119905)) = 119892119894 (120578 (119905)) minus 11989201198941198920119894Γ (119905) = diag (1205821 (119905) 1205822 (119905) sdot sdot sdot 120582119898 (119905)) 120582119894 (119905) = 120575119895 (119905) minus 12057501198951205750119895
(14)
Obviously we have
minus1 le 119892119897119894 minus 11989201198941198920119894 le 119897119894 (119905 minus 120578 (119905)) = 119892119894 minus 11989201198941198920119894 le 119892119906119894 minus 11989201198941198920119894= 119892119906119894 minus 119892119897119894119892119906119894 + 119892119897119894 le 1 (15)
Similarly we have
minus1 le 120582119895 (119905) le 1 (16)
In expressions from (13) to (16) 119894 and 119895 meet 119894 = 1 2 119899119895 = 1 2 119898 Based on (15) and (16) we have
minus119868119899times119899 le 119871 (119905 minus 120578 (119905)) le 119868119899times119899minus119868119898times119898 le Γ (119905) le 119868119898times119898 (17)
From on (14) the following can be obtained
119892119894 (119905 minus 120578 (119905)) = 1198920119894 (1 + 119897119894 (119905 minus 120578 (119905))) 119894 = 1 2 sdot sdot sdot 119899120575119894 (119905) = 1205750119894 (1 + 120582119894 (119905)) 119895 = 1 2 sdot sdot sdot 119898 (18)
4 Mathematical Problems in Engineering
Naturally the time-varying fault indicator matrices can berewritten as
119866 (119905 minus 120578 (119905)) = 1198660 (119868 + 119871 (119905 minus 120578 (119905))Θ (119905) = Θ0 (119868 + Γ (119905)) (19)
Inserting (19) into (11) we have
119906 (119905)= Θ0 (119868 + Γ (119905)) 1198701198660 (119868 + 119871 (119905 minus 120578 (119905))) 119909 (119905 minus 120578 (119905)) (20)
Then the new model of double-fault NCS can be obtained asfollows
1199091015840 (119905) = (119860 + Δ119860) 119909 (119905) + (119861 + Δ119861) Θ0 (119868 + Γ (119905))sdot 1198701198660 (119868 + 119871 (119905 minus 120578 (119905))) 119909 (119905 minus 120578 (119905)) + 119867120596 (119905)
119910 (119905) = 119862119909 (119905)(21)
Remark 3 The networked control systems in faulty case canbe modelled as system (21) with the effects of time-varyingdelay 120578(119905)whose upper bound and lower bound are describedin (12) Unlike the previousmodels [17 21 27 35] this modelis related to both sensor faults and actuator faults the faultsare time-varying which are reflected by the time-varyingparameters 119871(119905 minus 120578(119905)) and Γ(119905) From (17) we undoubtedlyknow the time-varying parameter 119871(119905 minus 120578(119905)) satisfies 119871119879119871 =1198712 le 119868 while the parameter Γ(119905) satisfies Γ119879Γ = Γ2 le 119868Remark 4 From the descriptions of faults matrices weundoubtedly know if 119897119894 = 11198920119894 minus 1 (119894 = 1 2 sdot sdot sdot 119899) we canobtain 119892119894 = 1 and 1198660(119868 + 119871(119905 minus 120578(119905))) = 119868 and then model (21)is an actuator fault model Similarly if 120582119894 = (120575119895 minus1205750119895)1205750119895 (119895 =1 2 sdot sdot sdot 119898) we can obtain 120575119895 = 1 and Θ0(119868 + Γ(119905)) = 119868 andthen model (21) represents a sensor fault model Thereforemodel (21) of a double-fault NCS contains cases of single-faults and the single-faults are a special formof double-faults
In the following section a fundamental preliminary resultis presented to guarantee the performance of a double-faultNCS based on the delay information
3 Performance Analysis of Double-Fault NCS
For the system model (21) established in Section 2 the costfunction is given as follows
119869 = intinfin0
[119909119879 (119905) 1198781119909 (119905) + 119906119879 (119905) 1198782119906 (119905)] 119889119905= intinfin0
119909119879 (119905) 1198781119909 (119905)+ [Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) 119909 (119905 minus 120578 (119905))]119879sdot 1198782Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) 119909 (119905 minus 120578 (119905)) 119889119905
(22)
where 1198781 and 1198782 are symmetric positive definite matrices
Definition 5 Formodel (21) and its cost function (22) if thereexists a control gain matrix 119870 satisfying the conditions
(1) the closed-loop system is asymptotically stable when120596(119905) = 0(2) for any zero initial condition and any nonzero vector120596(119905) isin 1198712[0 infin) given 120574 gt 0 the output 119910(119905) satisfies119910(119905)2 le 120574120596(119905)2(3) there exists a constant 1198690 and the cost function definedas (22) satisfies 119869infin le 1198690
then matrix 119870 is the 119867infin guaranteed cost control gain ofdouble-faults NCS
To analyse the stability of the system expediently thefollowing lemmas are introduced
Lemma 6 (see [36 37]) For any matrices119882119872119873 119865(119905) withFT119865 le 119868 and any scalar 120576 gt 0 the inequality holds as
119882 + 119872119865 (119905) 119873 + 119873119879119865119879 (119905) 119872119879le 119882 + 120576119872119872119879 + 120576minus1119873119879119873 (23)
Lemma 7 (see [38]) If 1205781 le 120578(119905) le 1205782 for any matrices Π1Π2 and Φ the following inequalities are equivalent(1) [120578(119905) minus 1205781]Π1 + [1205782 minus 120578(119905)]Π2 + Φ lt 0(2) [1205782 minus 1205781]Π1 + Φ lt 0 [1205782 minus 1205781]Π2 + Φ lt 0The fundamental preliminary result is presented in the
following theorem
Theorem 8 Given symmetric positive definite matrices 1198781 and1198782 a set of constant 120578119898 120578119872 1205881 gt 0 1205882 gt 0 and 120572 =(120578119872 minus 120578119898)2 If there exists a set of symmetric positive definitematrices 119877119894 (119894 = 1 2 3) and matrix 119875 gt 0 as well as matrices119872119897120573 1198722120573 119873119897120573 1198732120573 119880120573 (120573 = 1 2 3 4 5 6 7 8) 119870 and a setof constants 120576 gt 0 and 120574 gt 0 satisfying the LMIs
[[[[[[[[[[[[[[[[[
minus120576119868 0 0 0 120576119879lowast minus (1198781 + 119862119879119862)minus1 0 0 lowast lowast minus1198782minus1 0 Σlowast lowast lowast minusΓ119897 Ω119897119896lowast lowast lowast lowast Φ119897lowast lowast lowast lowast lowastlowast lowast lowast lowast lowastlowast lowast lowast lowast lowastlowast lowast lowast lowast lowastlowast lowast lowast lowast lowast
997888rarr
0 0 0 0 00 0 0 0 00 Θ0119870119866 0 Θ0 00 0 0 0 0119879 Θ 0 Δ 119879minus120576119868 1198642Θ01198701198660 0 1198642Θ0 0lowast minus12058811198805 0 0 (1198701198660)119879lowast lowast minus1205881minus11198805minus1 0 0lowast lowast lowast minus1205882119868 0lowast lowast lowast lowast minus1205882minus1119868
]]]]]]]]]]]]]]]]]
lt 0
119897 = 1 2 119896 = 1 2
(24)
where
Mathematical Problems in Engineering 5
Φ1 =
[[[[[[[[[[[[[[[[[[[
minus1198771 + 1198801119860 + (1198801119860)119879 1198771 + (1198802119860)119879 + 11987211 (1198803119860)119879 minus 11987311 (1198804119860)119879lowast minus1198771 + 11987212 + 11987212119879 11987213119879 minus 11987312 11987214119879lowast lowast minus1198773120572 minus 11987312 minus 11987312119879 1198773120572 minus 11987314119879lowast lowast lowast minus1198773120572lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
119875 minus 1198801 + (1198805119860)119879 Ψ1 + (1198806119860)119879 (1198807119860)119879 + (1198808119860)119879 + 1198801119867 0minus1198802 + 11987215119879 Ψ2 + 11987216119879 1198802119867 + 11987217119879 + 11987218119879 0minus1198803 minus 11987315119879 Ψ3 minus 11987316119879 1198803119867 minus 11987317119879 minus 11987318119879 0
minus1198804 Ψ4 1198804119867 012057811989821198771 + 120572 (1198772 + 1198773) minus 1198805 minus 1198805119879 Ψ5 minus 1198806119879 1198805119867 minus 1198807119879 minus 1198808119879 0
lowast Ψ6 Ξ 0lowast lowast 1198807119867 + 1198808119867 + (1198807119867)119879 + (1198808119867)119879 0lowast lowast lowast minus1205742119868
]]]]]]]]]]]]]]]]]]]
Φ2 =
[[[[[[[[[[[[[[[[[[[[
minus1198771 + 1198801119860 + (1198801119860)119879 1198771 + (1198802119860)119879 (1198803119860)119879 + 11987221 (1198804119860)119879 minus 11987321lowast minus1198771 minus 1198772120572 1198772120572 + 11987222 minus11987322lowast lowast minus1198772120572 + 11987223 + 11987223119879 11987224119879 minus 11987323lowast lowast lowast minus11987324 minus 11987324119879lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
119875 minus 1198801 + (1198805119860)119879 Ψ11015840 + (1198806119860)119879 (1198807119860)119879 + (1198808119860)119879 + 1198801119867 0minus1198802 Ψ21015840 1198802119867 0
minus1198803 + 11987225119879 Ψ31015840 + 11987226119879 1198803119867 + 11987227119879 + 11987228119879 0minus1198804 minus 11987325119879 Ψ41015840 minus 11987326119879 1198804119867 minus 11987327119879 minus 11987328119879 0
12057811989821198771 + 120572 (1198772 + 1198773) minus 1198805 minus 1198805119879 Ψ51015840 minus 1198806119879 1198805119867 minus 1198807119879 minus 1198808119879 0lowast Ψ61015840 Ξ1015840 0lowast lowast 1198807119867 + 1198808119867 + (1198807119867)119879 + (1198808119867)119879 0lowast lowast lowast minus1205742119868
]]]]]]]]]]]]]]]]]]]]]
Γ1 = 1205721198772Γ2 = 1205721198773
Ω11 = 1205721198721119879
6 Mathematical Problems in Engineering
Ω12 = 1205721198731119879Ω21 = 1205721198722119879Ω22 = 1205721198732119879
1198721119879 = [11987211119879 11987212119879 11987213119879 11987214119879 11987215119879 11987216119879 11987217119879 11987218119879] 1198722119879 = [11987221119879 11987222119879 11987223119879 11987224119879 11987225119879 11987226119879 11987227119879 11987228119879]
1198731119879 = [11987311119879 11987312119879 11987313119879 11987314119879 11987315119879 11987316119879 11987317119879 11987318119879] 1198732119879 = [11987321119879 11987322119879 11987323119879 11987324119879 11987325119879 11987326119879 11987327119879 11987328119879]
Ξ = (1198807119861Θ01198701198660)119879 + (1198808119861Θ01198701198660)119879 + 1198806119867 minus 11987217119879 minus 11987218119879 + 11987317119879 + 11987318119879Ψ119894 = 119880119894119861Θ01198701198660 + 1198731119894 minus 1198721119894 (119894 = 1 2 3 4 5)
Ψ6 = 1198806119861Θ01198701198660 + (1198806119861Θ01198701198660)119879 minus 11987216 minus 11987216119879 + 11987316 + 11987316119879Ξ1015840 = (1198807119861Θ01198701198660)119879 + (1198808119861Θ01198701198660)119879 + 1198806119867 minus 11987227119879 minus 11987228119879 + 11987327119879 + 11987328119879
Ψ1198941015840 = 119880119894119861Θ01198701198660 + 1198732119894 minus 1198722119894 (119894 = 1 2 3 4 5) Ψ10158406 = 1198806119861Θ01198701198660 + (1198806119861Θ01198701198660) 119879 minus 11987226 minus 11987226119879 + 11987326 + 11987326119879
= [(1198801119863)119879 (1198802119863)119879 (1198803119863)119879 (1198804119863)119879 (1198805119863)119879 (1198806119863)119879 (1198807119863)119879 + (1198808119863)119879 0]119879 = [1198641 0 0 0 0 1198642Θ01198701198660 0 0]
0 = [0 0 0 0 0 119868 0 0]119879 = [119868 0 0 0 0 0 0 0]
Θ = [(1198801119861Θ01198701198660)119879 (1198802119861Θ01198701198660)119879 (1198803119861Θ01198701198660)119879 (1198804119861Θ01198701198660)119879 (1198805119861Θ01198701198660)119879 (1198806119861Θ01198701198660)119879 (11988071198611198701198660)119879 + (11988081198611198701198660)119879 0]119879 Δ = [(1198801119861Θ0)119879 (1198802119861Θ0)119879 (1198803119861Θ0)119879 (1198804119861Θ0)119879 (1198805119861Θ0)119879 (1198806119861Θ0)119879 (1198807119861Θ0)119879 + (1198808119861Θ0)119879 0]119879
= [0 0 0 0 0 1198701198660 0 0] Σ = [0 0 0 0 0 Θ01198701198660 0 0]
(25)
then model (21) is asymptotically stable with the 119867infin normbound 120574 In addition the upper bound 1198690 of cost function 119869 isgiven as
1198690 = 119909119879 (0119905) 119875119909 (0) + 120578119898 int0minus120578119898
int0119904
1199091015840119879 (120591) 11987711199091015840 (120591) 119889119904119889120591+ intminus120578119898minus1205781
int0119904
1199091015840119879 (120591) 11987721199091015840 (120591) 119889119904119889120591+ intminus1205781minus120578119872
int0119904
1199091015840119879 (120591) 11987731199091015840 (120591) 119889119904119889120591
(26)
Proof First with the definition of 120572 = (120578119872 minus 120578119898)2 and 1205781 =120578119898+120572 the interval of delay is distributed into two subintervalsas follows
120578 (119905) isin [120578119898 120578119872] = [120578119898 1205781] cup [1205781 120578119872] (27)
Then we consider the Lyapunov-Krasovskii functional asfollows
V (119905) = 119909119879 (119905) 119875119909 (119905)+ 120578119898 int119905
119905minus120578119898
int119905119904
1199091015840119879 (120591) 11987711199091015840 (120591) 119889119904119889120591+ int119905minus120578119898119905minus1205781
int119905119904
1199091015840119879 (120591) 11987721199091015840 (120591) 119889119904119889120591+ int119905minus1205781119905minus120578119872
int119905119904
1199091015840119879 (120591) 11987731199091015840 (120591) 119889119904119889120591
(28)
where matrix 119875 satisfies 119875 gt 0 and 119877119894 (119894 = 1 2 3)are symmetric positive definite matrices with appropriatedimensions For the convenience of writing we denote 119871 =119871(119905 minus 120578(119905)) and Γ = Γ(119905) in the following expressions
Mathematical Problems in Engineering 7
Calculating the derivative of Lyapunov-Krasovskii functionand based on (21) we have
V1015840 (119905) = 2119909119879 (119905) 1198751199091015840 (119905) + 12057821198981199091015840119879 (119905) 11987711199091015840 (119905)minus 120578119898 int119905
119905minus120578119898
1199091015840119879 (119904) 11987711199091015840 (119904) 119889119904 + (1205781 minus 120578119898) 1199091015840119879 (119905)sdot 11987721199091015840 (119905) minus int119905minus120578119898
119905minus1205781
1199091015840119879 (119904) 11987721199091015840 (119904) 119889119904 + (120578119872 minus 1205781)sdot 1199091015840119879 (119905) 11987731199091015840 (119905) minus int119905minus1205781
119905minus120578119872
1199091015840119879 (119904) 11987731199091015840 (119904) 119889119904+ 2 [120576119879 (119905) 120596119879 (119905)] 119880 [(119860 + Δ119860) 119909 (119905)+ (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) 119909 (119905 minus 120578 (119905))+ 119867120596 (119905) minus 1199091015840 (119905)]
(29)
where V1015840(119905) = lim sup120575997888rarr0+(1120575)[V(119905 + 120575) minus V(119905)] [39]Based on Jessenrsquos inequality we have
minus 120578119898 int119905119905minus120578119898
1199091015840119879 (119904) 11987711199091015840 (119904) 119889119904 le [119909119879 (119905) 119909119879 (119905 minus 120578119898)]sdot [minus1198771 11987711198771 minus1198771] [ 119909 (119905)
119909 (119905 minus 120578119898)](30)
minus int119905minus120578119898119905minus1205781
1199091015840119879 (119904) 11987721199091015840 (119904) 119889119904le 1120572 [119909119879 (119905 minus 120578119898) 119909119879 (119905 minus 1205781)]sdot [minus1198772 11987721198772 minus1198772] [119909 (119905 minus 120578119898)119909 (119905 minus 1205781)]
(31)
minus int119905minus1205781119905minus120578119872
1199091015840119879 (119904) 11987731199091015840 (119904) 119889119904le 1120572 [119909119879 (119905 minus 1205781) 119909119879 (119905 minus 120578119872)]sdot [minus1198773 11987731198773 minus1198773] [ 119909 (119905 minus 1205781)119909 (119905 minus 120578119872)]
(32)
where 120572 = (120578119872 minus 120578119898)2 For the convenience of the followingdiscussion we define
120576119879 (119905) = [119909119879 (119905) 119909119879 (119905 minus 120578119898) 119909119879 (119905 minus 1205781) 119909119879 (119905 minus 120578119872)sdot 1199091015840119879 (119905) 119909119879 (119905 minus 120578 (119905)) 120596119879 (119905)] (33)
Case 1 If 120578(119905) isin [120578119898 1205781] weighted technology based on theprinciple of Newton-Leibniz is introduced as follows
2 [120576119879 (119905) 120596119879 (119905)] 1198721 [119909 (119905 minus 120578119898) minus 119909 (119905 minus 120578 (119905))minus int119905minus120578119898119905minus120578(119905)
1199091015840119879 (119904) 119889119904] = 0(34)
and
2 [120576119879 (119905) 120596119879 (119905)] 1198731 [119909 (119905 minus 120578 (119905)) minus 119909 (119905 minus 1205781)minus int119905minus120578(119905)119905minus1205781
1199091015840119879 (119904) 119889119904] = 0(35)
Because 1198772 gt 0 we haveminus 2 [120576119879 (119905) 120596119879 (119905)] 1198721 int119905minus120578119898
119905minus120578(119905)1199091015840 (119904) 119889119904 le (120578 (119905) minus 120578119898)
sdot [120576119879 (119905) 120596119879 (119905)] 1198721119877minus12 1198721119879 [120576119879 (119905) 120596119879 (119905)]119879+ int119905minus120578119898119905minus120578(119905)
1199091015840119879 (119904) 11987721199091015840 (119904) 119889119904(36)
and
minus 2 [120576119879 (119905) 120596119879 (119905)] 1198731 int119905minus120578(119905)119905minus1205781
1199091015840 (119904) 119889119904 le (1205781 minus 120578 (119905))sdot [120576119879 (119905) 120596119879 (119905)] 1198731119877minus12 1198731119879 [120576119879 (119905) 120596119879 (119905)]119879+ int119905minus120578(119905)119905minus1205781
1199091015840119879 (119904) 11987721199091015840 (119904) 119889119904(37)
Therefore
minus 2 [120576119879 (119905) 120596119879 (119905)] 1198721 int119905minus120578119898119905minus120578(119905)
1199091015840 (119904) 119889119904minus 2 [120576119879 (119905) 120596119879 (119905)] 1198731 int119905minus120578(119905)
119905minus1205781
1199091015840 (119904) 119889119904le (120578 (119905) minus 120578119898)sdot [120576119879 (119905) 120596119879 (119905)] 1198721119877minus12 1198721119879 [120576119879 (119905) 120596119879 (119905)]119879+ (1205781 minus 120578 (119905))sdot [120576119879 (119905) 120596119879 (119905)] 1198731119877minus12 1198731119879 [120576119879 (119905) 120596119879 (119905)]119879+ int119905minus120578119898119905minus1205781
1199091015840119879 (119904) 11987721199091015840 (119904) 119889119904
(38)
In addition 119910119879(119905)119910(119905)minus1205742120596119879(119905)120596(119905) both on the left and rightsides of equality (29) and 119909119879(119905)1198781119909(119905) + [Θ0(119868 + Γ)1198701198660(119868 +119871)119909(119905 minus 120578(119905))]1198791198782Θ0(119868 + Γ)1198701198660(119868 + 119871)119909(119905 minus 120578(119905)) on the rightof the equal sign ldquo=rdquo and then inserting (30) (32) (34) (35)(38) to the obtained inequality we have
V1015840 (119905) + 119910119879 (119905) 119910 (119905) minus 1205742120596119879 (119905) 120596 (119905)le [120576119879 (119905) 120596119879 (119905)] Φ1 [120576119879 (119905) 120596119879 (119905)]119879+ (120578 (119905) minus 120578119898)sdot [120576119879 (119905) 120596119879 (119905)] 1198721119877minus12 1198721119879 [120576119879 (119905) 120596119879 (119905)]119879+ (1205781 minus 120578 (119905))sdot [120576119879 (119905) 120596119879 (119905)] 1198731119877minus12 1198731119879 [120576119879 (119905) 120596119879 (119905)]119879
(39)
where
8 Mathematical Problems in Engineering
Φ1 =
[[[[[[[[[[[[[[[[[[[[
Ξ1 1198771 + [1198802 (119860 + Δ119860)]119879 + 11987211 [1198803 (119860 + Δ119860)]119879 minus 11987311 [1198804 (119860 + Δ119860)]119879lowast minus1198771 + 11987212 + 11987212119879 11987213119879 minus 11987312 11987214119879lowast lowast minus1198773120572 minus 11987312 minus 11987312119879 1198773120572 minus 11987314119879lowast lowast lowast minus1198773120572lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
119875 minus 1198801 + [1198805 (119860 + Δ119860)]119879 Ψ1 + [1198806 (119860 + Δ119860)]119879 [1198807 (119860 + Δ119860)]119879 + [1198808 (119860 + Δ119860)]119879 + 1198801119867 0minus1198802 + 11987215119879 Ψ2 + 11987216119879 1198802119867 + 11987217119879 + 11987218119879 0minus1198803 minus 11987315119879 Ψ3 minus 11987316119879 1198803119867 minus 11987317119879 minus 11987318119879 0
minus1198804 Ψ4 1198804119867 012057811989821198771 + 120572 (1198772 + 1198773) minus 1198805 minus 1198805119879 Ψ5 minus 1198806119879 1198805119867 minus 1198807119879 minus 1198808119879 0
lowast Ψ6 Ξ2 0lowast lowast 1198807119867 + 1198808119867 + (1198807119867)119879 + (1198808119867)119879 0lowast lowast lowast minus1205742119868
]]]]]]]]]]]]]]]]]]]
Ξ1 = minus1198771 + 1198801 (119860 + Δ119860) + [1198801 (119860 + Δ119860)]119879 + 119862119879119862 + 1198781Ξ2 = [1198807 (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 + [1198808 (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 + 1198806119867 minus 11987217119879 minus 11987218119879 + 11987317119879
+ 11987318119879Ψ119894 = 119880119894 (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) + 1198731119894 minus 1198721119894 (119894 = 1 2 3 4 5) Ψ6 = 1198806 (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)
+ [1198806 (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 [Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 1198782Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) minus 11987216 minus 11987216119879 + 11987316+ 11987316119879
(40)
ifΦ1 + (120578 (119905) minus 120578119898) 1198721119877minus12 1198721119879
+ (1205781 minus 120578 (119905)) 1198731119877minus12 1198731119879 lt 0 (41)
Next we need to acquire the inequality (24) through atransformation based on inequality (41) which is equivalentto the following inequalities by applying the theory given inLemma 7 and the Schur complement also used byD Yue [38]in the previous study
[minus (1205781 minus 120578119898)minus1 1198772 1198721119879lowast Φ1 ] lt 0 (42)
[minus (1205781 minus 120578119898)minus1 1198772 1198731119879lowast Φ1 ] lt 0 (43)
Premultiplying and postmultiplying the inequalities above bydiag((1205781 minus 120578119898)119868 119868) we have
[minus1205721198772 Ω1119896lowast Φ1 ] lt 0 (44)
Applying the theory of the Schur complement to inequality(44) we have
[[[[[[[
minus (1198781 + 119862119879119862)minus1 0 0 lowast minus1198782minus1 0 Σlowast lowast minus1205721198772 Ω1119896lowast lowast lowast Φ10158401
]]]]]]]
lt 0 (45)
where
Mathematical Problems in Engineering 9
Φ11015840 =
[[[[[[[[[[[[[[[[[[[[
Ξ11015840 1198771 + [1198802 (119860 + Δ119860)]119879 + 11987211 [1198803 (119860 + Δ119860)]119879 minus 11987311 [1198804 (119860 + Δ119860)]119879lowast minus1198771 + 11987212 + 11987212119879 11987213119879 minus 11987312 11987214119879lowast lowast minus1198773120572 minus 11987312 minus 11987312119879 1198773120572 minus 11987314119879lowast lowast lowast minus1198773120572lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
119875 minus 1198801 + [1198805 (119860 + Δ119860)]119879 Ψ1 + [1198806 (119860 + Δ119860)]119879 [1198807 (119860 + Δ119860)]119879 + [1198808 (119860 + Δ119860)]119879 + 1198801119867 0minus1198802 + 11987215119879 Ψ2 + 11987216119879 1198802119867 + 11987217119879 + 11987218119879 0minus1198803 minus 11987315119879 Ψ3 minus 11987316119879 1198803119867 minus 11987317119879 minus 11987318119879 0minus1198804 Ψ4 1198804119867 0
12057811989821198771 + 120572 (1198772 + 1198773) minus 1198805 minus 1198805119879 Ψ5 minus 1198806119879 1198805119867 minus 1198807119879 minus 1198808119879 0lowast Ψ61015840 Ξ2 0lowast lowast 1198807119867 + 1198808119867 + (1198807119867)119879 + (1198808119867)119879 0lowast lowast lowast minus1205742119868
]]]]]]]]]]]]]]]]
Ξ11015840 = minus1198771 + 1198801 (119860 + Δ119860) + [1198801 (119860 + Δ119860)]119879Ψ61015840 = 1198806 (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) + [1198806 (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 minus 11987216 minus 11987216119879 + 11987316 + 11987316119879
Σ = [0 0 0 0 0 Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) 0 0]
(46)
Inequality (44) can be written as
[[[[[
minus (1198781 + 119862119879119862)minus1 0 0 lowast minus1198782minus1 0 Σlowast lowast minus1205721198772 Ω1119896lowast lowast lowast Φ101584010158401]]]]]
+ [[[[
000119863]]]]
119865 [[[[
000119864119879
]]]]
119879
+ [[[[
000119864119879
]]]]
119865119879[[[[[
000
]]]]]
119879
lt 0(47)
where
Φ110158401015840 =
[[[[[[[[[[[[[[[[[[[[
minus1198771 + 1198801119860 + (1198801119860)119879 1198771 + (1198802119860)119879 + 11987211 (1198803119860)119879 minus 11987311 (1198804119860)119879lowast minus1198771 + 11987212 + 11987212119879 11987213119879 minus 11987312 11987214119879lowast lowast minus1198773120572 minus 11987312 minus 11987312119879 1198773120572 minus 11987314119879lowast lowast lowast minus1198773120572lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
10 Mathematical Problems in Engineering
119875 minus 1198801 + (1198805119860)119879 Ψ110158401015840 + (1198806119860)119879 (1198807119860)119879 + (1198808119860)119879 + 1198801119867 0minus1198802 + 11987215119879 Ψ210158401015840 + 11987216119879 1198802119867 + 11987217119879 + 11987218119879 0minus1198803 minus 11987315119879 Ψ310158401015840 minus 11987316119879 1198803119867 minus 11987317119879 minus 11987318119879 0
minus1198804 Ψ41015840 1198804119867 012057811989821198771 + 120572 (1198772 + 1198773) minus 1198805 minus 1198805119879 Ψ510158401015840 minus 1198806119879 1198805119867 minus 1198807119879 minus 1198808119879 0
lowast Ψ610158401015840 Ξ210158401015840 0lowast lowast 1198807119867 + 1198808119867 + (1198807119867)119879 + (1198808119867)119879 0lowast lowast lowast minus1205742119868
]]]]]]]]]]]]]]]]]]]
Ξ210158401015840 = [1198807119861Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 + [1198808119861Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 + 1198806119867 minus 11987217119879 minus 11987218119879 + 11987317119879 + 11987318119879Ψ11989410158401015840 = 119880119894119861Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) + 1198731119894 minus 1198721119894 (119894 = 1 2 3 4 5)
Ψ61015840 = 1198806119861Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) + [1198806119861Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 minus 11987216 minus 11987216119879 + 11987316 + 11987316119879 = [1198641 0 0 0 0 1198642Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) 0 0]
(48)
With the definition of scalar 120576 gt 0 we apply the theory givenin Lemma 6 to (47) also used by Y Wang and L Xie [37]in which the uncertain matrix 119865 can be eliminated and asufficient condition of (47) is obtained
[[[[[[[
minus (1198781 + 119862119879119862)minus1 0 0 lowast minus1198782minus1 0 Σlowast lowast minus1205721198772 Ω1119896lowast lowast lowast Φ101584010158401
]]]]]]]
+ 120576 [[[[[[
01198630
]]]]]]
[[[[[[
01198630
]]]]]]
119879
+ 120576minus1[[[[[[[
000
119879
]]]]]]]
[[[[[[[
000
119879
]]]]]]]
119879
lt 0
(49)
Applying the Schur complement to inequality (49) we have
[[[[[[[[[[[[[[
minus120576119868 0 0 0 120576119879 0lowast minus (1198781 + 119862119879119862)minus1 0 0 0lowast lowast minus1198782minus1 0 Σ 0lowast lowast lowast minus1205721198772 Ω1119896 0lowast lowast lowast lowast Φ101584010158401 119879lowast lowast lowast lowast lowast minus120576119868
]]]]]]]]]]]]]]
lt 0
(50)
There exists 1205881 gt 0 1205882 gt 0 Based on (17) and Remark 3 inSection 2 we know that 119871119879119871 le 119868 and Γ119879Γ le 119868 According
to expressions (47) (49) and (50) we obviously know that1198805 gt 0 Using Lemma 6 again we have
Θ0 (119868 + Γ) 1198701198660119871 + [Θ0 (119868 + Γ) 1198701198660119871]119879le 1205881minus1Θ0 (119868 + Γ) 11987011986601198805minus1 [Θ0 (119868 + Γ) 1198701198660]119879
+ 12058811198805(51)
and
Θ0Γ1198701198660 + (Θ0Γ1198701198660)119879le 1205882minus1Θ0Θ0119879 + 1205882 (1198701198660)1198791198701198660
(52)
Based on inequalities (51) (52) and the Schur complementwe know inequality (24) is a sufficient condition of inequality(50) while inequality (50) is equivalent to inequality (41)Therefore we can undoubtedly obtain inequality (24) asa sufficient condition of inequality (41) Thus based oninequality (39) and (41) we know(1) if120596(119905) equiv 0 obviously we have V1015840(119905) lt 0 so system (21)is asymptotically stable(2) if 119909(0) equiv 0 we know V(0) = 0 In addition it can beobtained that V(infin) ge 0
Therefore
intinfin0
V1015840 (119905) + 119910119879 (119905) 119910 (119905) minus 1205742120596119879 (119905) 120596 (119905) 119889119905= V (infin) + intinfin
0119910119879 (119905) 119910 (119905) minus 1205742120596119879 (119905) 120596 (119905) 119889119905 lt 0
(53)
Thus
intinfin0
119910119879 (119905) 119910 (119905) lt intinfin0
1205742120596119879 (119905) 120596 (119905) 119889119905 (54)
Mathematical Problems in Engineering 11
Because 120596(119905) isin 1198712[0 infin) we have1003817100381710038171003817119910 (119905)1003817100381710038171003817 le 120574 120596 (119905)119879 (55)
It is known that model (21) is asymptotically stable with the119867infin norm bound 120574Moreover according to (39) and (41) we have
V1015840 (119905) le minus119909119879 (119905) 1198781119909 (119905)minus [Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) 119909 (119905 minus 120578 (119905))]119879
sdot 1198782Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) 119909 (119905 minus 120578 (119905))(56)
Through the integral operation it can be determined that119869 le V(0) In addition by inserting 119905 = 0 into the Lyapunov-Krasovskii function shown as expression (28) the upperbound of cost function 119869 can be obtained and shown asexpression (26) Therefore the theorem is verified if 119897 = 1Case 2 If 120578(119905) isin [1205781 120578119872] weighted technology based on theprinciple of Newton-Leibniz is introduced as follows
2 [120576119879 (119905) 120596119879 (119905)] 1198722 [119909 (119905 minus 1205781) minus 119909 (119905 minus 120578 (119905))minus int119905minus1205781119905minus120578(119905)
1199091015840119879 (119904) 119889119904] = 0(57)
2 [120576119879 (119905) 120596119879 (119905)] 1198732 [119909 (119905 minus 120578 (119905)) minus 119909 (119905 minus 120578119872)minus int119905minus120578(119905)119905minus120578119872
1199091015840119879 (119904) 119889119904] = 0(58)
Because 1198773 gt 0 we have
minus 2 [120576119879 (119905) 120596119879 (119905)] 1198722 int119905minus1205781119905minus120578(119905)
1199091015840 (119904) 119889119904 le (120578 (119905) minus 1205781)sdot [120576119879 (119905) 120596119879 (119905)] 1198722119877minus13 1198722119879 [120576119879 (119905) 120596119879 (119905)]119879+ int119905minus1205781119905minus120578(119905)
1199091015840119879 (119904) 11987731199091015840 (119904) 119889119904(59)
minus 2 [120576119879 (119905) 120596119879 (119905)] 1198732 int119905minus120578(119905)119905minus120578119872
1199091015840 (119904) 119889119904 le (120578119872 minus 120578 (119905))sdot [120576119879 (119905) 120596119879 (119905)] 1198732119877minus13 1198731119879 [120576119879 (119905) 120596119879 (119905)]119879+ int119905minus120578(119905)119905minus120578119872
1199091015840119879 (119904) 11987731199091015840 (119904) 119889119904(60)
Therefore
minus 2 [120576119879 (119905) 120596119879 (119905)] 1198722 int119905minus1205781119905minus120578(119905)
1199091015840 (119904) 119889119904
minus 2 [120576119879 (119905) 120596119879 (119905)] 1198732 int119905minus120578(119905)119905minus120578119872
1199091015840 (119904) 119889119904le (120578 (119905) minus 1205781)sdot [120576119879 (119905) 120596119879 (119905)] 1198722119877minus13 1198722119879 [120576119879 (119905) 120596119879 (119905)]119879+ (120578119872 minus 120578 (119905))sdot [120576119879 (119905) 120596119879 (119905)] 1198732119877minus13 1198732119879 [120576119879 (119905) 120596119879 (119905)]119879
+ int119905minus1205781119905minus120578119872
1199091015840119879 (119904) 11987731199091015840 (119904) 119889119904
(61)
In addition 119910119879(119905)119910(119905)minus1205742120596119879(119905)120596(119905) both on the left and rightsides of equality (29) and 119909119879(119905)1198781119909(119905) + [Θ0(119868 + Γ)1198701198660(119868 +119871)119909(119905minus120578(119905))]1198791198782Θ0(119868+Γ)1198701198660(119868+119871)119909(119905minus120578(119905)) on the right sideof equal sign ldquo=rdquo By inserting (30) (31) (57) (58) and (61)into the obtained inequality the item minus int119905minus1205781
119905minus1205781198721199091015840119879(119904)11987731199091015840(119904)119889119904
can be offset while the item minus int119905minus120578119898119905minus1205781
1199091015840119879(119904)11987721199091015840(119904)119889119904 is offsetin Case 1 Then in the same methods of transformation asCase 1 the inequality (24) when 119897 = 2 can be obtainedTherefore the proof is complete
Remark 9 In the two different cases a variational weightingmatrix and Jessenrsquos inequalities are used to derive the 119867infinguaranteed cost fault-tolerant condition of the system inwhich more delay information is employed to reduce theconservatism
The next section will provide sufficient conditions fordesigning the guaranteed cost fault-tolerant control for adouble-fault NCS
4 Guaranteed Cost Fault-Tolerant Control ofDouble-Fault NCS
Inequality (24) is not linear with respect to the gain matricesof the controller so it is needs to be reformulated into LMIsvia a change of variables
Theorem 10 Given symmetric positive definite matrices 1198781and 1198782 a set of constant 120578119898 120578119872 1205881 gt 0 1205882 gt 0 120582119894 (119894 = from1 to 7) and 120572 = (120578119872 minus 120578119898)2 If there exists a set of symmetricpositive definite matrices 119895 (119895 = 1 2 3)119883 andmatrix gt 0as well as matrices 1120573 2120573 1120573 2120573 (120573 =from 1 to 8)
12 Mathematical Problems in Engineering
119884 and a set of constants 120576 gt 0 and 120583 gt 0 satisfying theLMIs
[[[[[[[[[[[[[[[[[[[[[[[[[[
minus120576119868 0 0 0 120576119863119879lowast minus (1198781 + 119862119879119862)minus1 0 0 Πlowast lowast minus1198782minus1 0 Σlowast lowast lowast minusΓ119897 Ω119897119896lowast lowast lowast lowast Φ119897lowast lowast lowast lowast lowastlowast lowast lowast lowast lowastlowast lowast lowast lowast lowastlowast lowast lowast lowast lowastlowast lowast lowast lowast lowast
0 0 0 0 00 0 0 0 00 Θ0119884 0 Θ0 00 0 0 0 0
119864119879 Θ 119883 Δ 119884119879minus120576119868 1198642Θ0119884 0 1198642Θ0 0lowast minus1205881119883119879 0 0 119884119879lowast lowast minus1205881minus1119883 0 0lowast lowast lowast minus1205882119868 0lowast lowast lowast lowast minus1205882minus1119868
]]]]]]]]]]]]]]]]]]]]]]
lt 0
119897 = 1 2 119896 = 1 2(62)
where
Φ1 =
[[[[[[[[[[[[[[[[[[[[[
minus1 + 1205821119860119883119879 + 1205821119883119860119879 1 + 1205822119883119860119879 + 11 1205823119883119860119879 minus 11 1205824119883119860119879lowast minus1 + 12 + 12119879 13119879 minus 12 14119879lowast lowast minus3120572 minus 12 minus 12119879 3120572 minus 14119879lowast lowast lowast minus3120572lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
minus 1205821119883119879 + 119883119860119879 Ψ1 + 1205825119883119860119879 1205826119883119860119879 + 1205827119883119860119879 + 1205821119867119883119879 0minus1205822119883119879 + 15119879 Ψ2 + 16119879 1205822119867119883119879 + 17119879 + 18119879 0minus1205823119883119879 minus 15119879 Ψ3 minus 16119879 1205823119867119883119879 minus 17119879 minus 18119879 0
minus1205824119883119879 Ψ4 1205824119867119883119879 012057811989821 + 120572 (2 + 3) minus 119883119879 minus 119883 Ψ5 minus 1205825119883 119867119883119879 minus 1205826119883 minus 1205827119883 0
lowast Ψ6 Ξ 0lowast lowast 1205826119867119883119879 + 1205827119867119883119879 + 1205826119883119867119879 + 1205827119883119867119879 0lowast lowast lowast minus120583119868
]]]]]]]]]]]]]]]]]
Φ2 =
[[[[[[[[[[[[[[[[[[[[[
minus1 + 1205821119860119883119879 + 1205821119883119860119879 1 + 1205822119883119860119879 1205823119883119860119879 + 21 1205824119883119860119879 minus 21lowast minus1 minus 2120572 2120572 + 22 minus22lowast lowast minus2120572 + 23 + 23119879 24119879 minus 23lowast lowast lowast minus24 minus 24119879lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
Mathematical Problems in Engineering 13
minus 1205821119883119879 + 119883119860119879 Ψ11015840 + 1205825119883119860119879 1205826119883119860119879 + 1205827119883119860119879 + 1205821119867119883119879 0minus1205822119883119879 Ψ21015840 1205822119867119883119879 0
minus1205823119883119879 + 25119879 Ψ31015840 + 26119879 1205823119867119883119879 + 27119879 + 28119879 0minus1205824119883119879 minus 25119879 Ψ41015840 minus 26119879 1205824119867119883119879 minus 27119879 minus 28119879 0
12057811989821 + 120572 (2 + 3) minus 119883 minus 119883119879 Ψ51015840 minus 1205825119883 119867119883119879 minus 1205826119883 minus 1205827119883 0lowast Ψ61015840 Ξ1015840 0lowast lowast 1205826119867119883119879 + 1205827119867119883119879 + 1205826119883119867119879 + 1205827119883119867119879 0lowast lowast lowast minus120583119868
]]]]]]]]]]]]]]]]]]]]]
Γ1 = 1205721198772Γ1 = 1205722Γ2 = 1205723
Ω11 = 1205721119879Ω12 = 1205721119879Ω21 = 1205722119879Ω22 = 1205722119879
1119879 = [11119879 12119879 13119879 14119879 15119879 16119879 17119879 18119879] 2119879 = [21119879 22119879 23119879 24119879 25119879 26119879 27119879 28119879]
1119879 = [11119879 12119879 13119879 14119879 15119879 16119879 17119879 18119879] 1198732119879 = [21119879 22119879 23119879 24119879 25119879 26119879 27119879 28119879]
Ξ = 1205826 (119861Θ0119884)119879 + 1205827 (119861Θ0119884)119879 + 1205825119867119883119879 minus 17119879 minus 18119879 + 17119879 + 18119879Ψ119894 = 120582119894119861Θ0119884 + 1119894 minus 1119894 (119894 = 1 2 3 4)
Ψ5 = 119861Θ0119884 + 1119894 minus 1119894Ψ6 = 1205825119861Θ0119884 + 1205825 (119861Θ0119884)119879 minus 11987216 minus 11987216119879 + 11987316 + 11987316119879
Ξ1015840 = 1205826 (119861Θ0119884)119879 + 1205827 (119861Θ0119884)119879 + 1205825119867119883119879 minus 27119879 minus 28119879 + 27119879 + 28119879Ψ1198941015840 = 120582119894119861Θ0119884 + 2119894 minus 2119894 (119894 = 1 2 3 4)
Ψ51015840 = 119861Θ0119884 + 2119894 minus 2119894Ψ61015840 = 1205825119861Θ0119884 + 1205825 (119861Θ0119884)119879 minus 26 minus 26119879 + 26 + 26119879
119863 = [1205821119863119879 1205822119863119879 1205823119863119879 1205824119863119879 119863119879 1205825119863119879 1205826119863119879 + 1205827119863119879 0]119879 119864 = [1198641119883119879 0 0 0 0 1198642Θ0119884 0 0]
119883 = [0 0 0 0 0 119883119879 0 0]119879 Π = [119883119879 0 0 0 0 0 0 0]
14 Mathematical Problems in Engineering
Θ = [(1205821119861Θ0119884)119879 (1205822119861Θ0119884)119879 (1205823119861Θ0119884)119879 (1205824119861Θ0119884)119879 (119861Θ0119884)119879 (1205825119861Θ0119884)119879 (1205826119861119884)119879 + (1205827119861119884)119879 0]119879 Δ = [(1205821119861Θ0)119879 (1205822119861Θ0)119879 (1205823119861Θ0)119879 (1205824119861Θ0)119879 (119861Θ0)119879 (1205825119861Θ0)119879 (1205826119861Θ0)119879 + (1205827119861Θ0)119879 0]119879
119884 = [0 0 0 0 0 119884 0 0] Σ = [0 0 0 0 0 Θ0119884 0 0]
(63)
then the 119867infin guaranteed cost control gain 119870 = 119884119883minus1198791198660minus1 canrendermodel (21) to be asymptotically stable with the119867infin normbound 120574 = radic120583 13e upper bound 1198690 of cost function 119869 is givenas
1198690 = 119909119879 (0) 119883minus1119883minus119879119909 (0)+ 120578119898 int0
minus120578119898
int0119904
1199091015840119879 (120591) 119883minus11119883minus1198791199091015840 (120591) 119889119904119889120591+ intminus120578119898minus1205781
int0119904
1199091015840119879 (120591) 119883minus12119883minus1198791199091015840 (120591) 119889119904119889120591+ intminus1205781minus120578119872
int0119904
1199091015840119879 (120591) 119883minus13119883minus1198791199091015840 (120591) 119889119904119889120591
(64)
Proof The proof is based on a suitable transformation anda change of variables allowing us to obtain inequality (24)in Theorem 8 First we define 1198805 = 1198800 119880119894 = 1205821198941198800 (119894 =from 1 to 4) 1198806 = 12058251198800 in (24) Because we consider thedimension of state119909is equal to that of outside disturbance120596 in this paper we can also define 1198807 = 12058261198800 1198808 =12058271198800 Obviously (24) implies 1198805 gt 0 so 1198800 is nonsingularThen using the analysis method of D Yue [40] and Z Wang[41] pre- and postmultiplying both sides of inequality (24)with diag(119868 119868 119868 119883 119868 119883 119868 119868 119868) and its transpose where = diag(119883 119883 119883 119883 119883 119883 119883 119883) and 119883 = 1198800minus1 introducingnew variables 119883119875119883119879 = 119883119877119895119883119879 = 119895 (119895 = 1 2 3)119883119872119897120573119883119879 = 119897120573 119883119873119897120573119883119879 = 119897120573 (119897 = 1 2 120573 = 1 2 sdot sdot sdot 8)1198701198660119883119879 = 119884 and 120583 = 1205742 From the definition of 1198660 we know1198660 is invertible so 119870 can be obtained by calculating 119870 =119884119883minus1198791198660minus1 It is easy to see that 10 and (64) respectively imply(24) and (26) Therefore from Theorem 8 we can completethe proof
To obtain the optimal bound 119869lowast shown in (26) thecommonly used method is to consider it as an optimizationproblem like [42] in which the expression of initial state 119909(119905)(119905 isin [minus120578119872 0]) needs to be known The expression of initialstate is not given in this paper Therefore the optimizationmethod used in [42] cannot be used here A practical methodto obtain 119869lowast also used by D Yue [43] is employed as follows
Suppose 1199091015840(119905) is bounded if 119905 isin [minus120578119872 0] and satisfying1199091015840119879(120591)1199091015840(120591) le ℓ In addition suppose that there exists 120573119894 gt0 (119894 = 1 2 3) satisfying119883minus1119894119883minus119879 le 120573119894119868 119894 = 1 2 3119883minus1119883minus119879 le 1205734119868 (65)
Inserting this into (64) we have
1198690 le 1205734119909119879 (0) 119909 (0) + 05ℓ12057311205781198983 + 05ℓ1205732 (12057812 minus 1205781198982)+ 05ℓ1205733 (1205781198722 minus 12057812) = 119869lowast (66)
Applying the Schur complement to the inequalities above wehave
[minus120573119894119868 119883minus1lowast minus119877119894minus1] lt 0 119894 = 1 2 3
[minus1205734119868 119883minus1lowast minus119875minus1] lt 0
(67)
Then combining 10 and (67) 119894minus1 119894 (119894 = 1 2 3)minus1 119883minus1 119883 exist simultaneously We cannot directly usethe LMI tools to solve the problem Defining 119894minus1 = 119894(119894 = 1 2 3) minus1 = 119883minus1 = and using the idea of thecone complementary linearization algorithm the guaranteedcost fault-tolerant controller of system (21) and the value ofoptimal performance indicator 119869lowast can be obtained in thefollowing method
Minimize 119905119903119886119888119890 (11 + 22 + 33 + + )+ 1205734 + 0512057311205781198983 + 051205732 (12057812 minus 1205781198982)+ 051205733 (1205781198722 minus 12057812)
Subject to 119868119899119890119902119906119886119897119894119905119894119890119904 (62) [minus120573119894119868
lowast minus119894] lt 0 (119894 = 1 2 3)
[minus1205734119868 lowast minus] lt 0
[119883 119868lowast ] ge 0
[1 119868lowast 1] ge 0
[2 119868lowast 2] ge 0
Mathematical Problems in Engineering 15
[3 119868lowast 3] ge 0
[ 119868lowast ] ge 0
119894 gt 0 (119894 = 1 2 3) (68)
5 Simulations
Example 11 Consider inverted pendulum model that canusually be modelled as (1) and the system parameters aregiven as follows
119860 = [minus2 1110 4 ]
119861 = [01minus4]
119862 = [minus03151 01011 03]
119867 = [015 minus056minus01 032 ]
Δ119860 = [004 sin 119905 015 sin 119905minus02 sin 119905 075 sin 119905]
Δ119861 = [002 sin 119905minus01 sin 119905]
119863 = [ 01minus05]
119865 (119905) = sin 119905
(69)
Therefore we have
1198641 = [04 15] 1198642 = 02 (70)
For this simulation the initial state of system is assumed119909(0) = [2 minus1]119879 and the external disturbance is considered as120596(119905) = [015 minus05]119879 3119904 le 119905 le 4119904
0 119900119905ℎ119890119903119904 Here we take the upper
bound of time-varying delay as 120578119872 = 03119904 and its lower boundas 120578119898 = 0119904 namely 0 le 120578(119905) le 03 In addition the faultbounds of the system are given in Table 1
Table 1 The bounds of faults
Symbol Upper bound Lower boundActuatorfaultsΘ 136 009
SensorFaults119866
[[
165 00 175]
][[
0 00 015]
]
minus01
0
01
02
03
04
05
Del
ay
1 2 3 4 5 60Time s
Figure 2 The time-varying delay in double-fault NCS
We choose the parameters as follows
1205821 = 011205822 = 0151205823 = minus0641205824 = 031205825 = 1205826 = 0351205827 = 181198782 = 0311205881 = 30001205882 = 22032ℓ = 1
1198781 = [10013 00 9207]
(71)
By taking advantage of the LMI tool box and inserting theabove parameters into inequalities 10 and (68) we can obtainthe 119867infin guaranteed cost control gain
119870 = 119884119883minus1198791198660minus1 = [85163 151398] (72)
with 120574 = radic120583 = 1952516The corresponding optimal performance indicator (the
upper bound value of guaranteed cost function) is 119869lowast =83162563The time-varying delay is shown in Figure 2 In Figure 3
(a) is the actuator fault which is a piecewise-linear function
16 Mathematical Problems in Engineering
002040608
1121416
Actu
ator
faul
t
1 2 3 4 5 60Time s
(a) Time-varying actuator fault
minus020
02040608
112141618
Sens
or fa
ult
1 2 3 4 5 60Time s
(b) Time-varying sensor fault
Figure 3 The time-varying faults
x1
x2
1 2 3 4 5 60Time s
minus15
minus1
minus05
0
05
1
15
2
Stat
e X
Figure 4 The state response curve of double-fault NCS
1 2 3 4 5 60Time s
minus8minus7minus6minus5minus4minus3minus2minus1
012
Con
trol i
nput
Figure 5 The control input of double-fault NCS
It keeps the minimum value from 13119904 to 17119904 while it keepsthe maximum value from 37119904 to 43119904 The sensor faults areshown as (b) which is sinusoidal It should be noted thatthe green dotted line represents the fault of sensor 1 whilethe blue solid line represents the fault of sensor 2 Throughthe state response of the double-fault NCS shown in Figure 4and corresponding control signal shown in Figure 5 we know
x1
x2
1 2 3 4 5 60Time s
minus8
minus6
minus4
minus2
0
2
4
6
Stat
e X
Figure 6 The state response curve of double-fault NCS
the 119867infin guaranteed cost controller designed in this paper isable to make the double-fault NCS asymptotically stable Thesystem gets preliminarily steady at 2119904 and its state can returnto the equilibrium position in a certain period of time whenthe NCS is affected by external disturbance Compared withthe state response of worse stability shown in Figure 6 whenthe method proposed in [28] is used for this double-faultproblem it sufficiently proves the effectiveness and feasibilityof the method proposed in this paper
To better illustrate the effectiveness of the method pro-posed in this paper the following example is presented
Example 12 Consider the parameters of system (1) as follows
119860 = [[[[[[
021 0 035 10 minus53 minus586 323
365 minus11 minus156 minus0890 0 minus158 minus285
]]]]]]
119861 = [559 12 minus089 13]119879 119862 = [17 02 015 minus018]
Mathematical Problems in Engineering 17
minus15
minus1
minus05
0
05
1
15
Stat
e X1 2 3 4 5 6 7 8 9 100
Time s
R1R2
R3R4
Figure 7 The state response curve of double-fault NCS
Δ119860 = [[[[
082 sin 119905 0 0 00 012 sin 119905 0 00 0 minus058 sin 119905 00 0 0 101 sin 119905]]]]
Δ119861 = [[[[
minus015 sin 119905008 sin 1199050minus028 sin 119905]]]]
119867 = [[[[
minus041 096 052 0006 minus057 0 021121 0 059 0minus032 minus011 minus035 minus003]]]]
119863 = 1198684times4119865 (119905) = diag (sin 119905 sin 119905 sin 119905 sin 119905)
(73)
Therefore we have
1198641 = diag (082 012 minus058 101) 1198642 = [minus015 008 0 minus028]119879 (74)
For this simulation the initial state of system is assumedas 119909(0) = [121 minus051 023 minus018]119879 and the externaldisturbance is considered as
120596 (119905) = [015 cos 119905 015 cos 119905 minus012 sin 119905 minus025 cos 119905]119879 6119904 le 119905 le 81199040 119900119905ℎ119890119903119904 (75)
The uncertain time-varying delay satisfies 0 le 120578(119905) le023119904 In addition the fault bounds of the system are givenin Table 2 Other parameters are selected as follows
1205821 = 121205822 = minus2031205823 = 1681205824 = minus231205825 = minus1051205826 = 6051205827 = 5121198781 = diag (19888 15634 8709 12876) 1198782 = 586
1205881 = 57981205882 = 1879ℓ = 1
(76)
By taking advantage of the LMI tool box and submittingthese parameters above into inequalities 10 and (68) we canobtain the 119867infin guaranteed cost control gain
119870 = 119884119883minus1198791198660minus1= [minus17256 15512 minus08571 07451]
with 120574 = radic120583 = 5819806(77)
The corresponding optimal performance indicator is 119869lowast =65021047 From the state response shown in Figure 7 andcontrol signal shown in Figure 8 we undoubtedly know
18 Mathematical Problems in Engineering
Table 2 The bounds of faults
Symbol Upper bound Lower boundActuatorfaultsΘ 150 012
SensorFaults119866
[[[[[[[[
185 0 0 00 160 0 00 0 125 00 0 0 165
]]]]]]]]
[[[[[[[[
025 0 0 00 0 0 00 0 0 00 0 0 015
]]]]]]]]
minus4
minus3
minus2
minus1
0
1
2
Con
trol i
nput
1 2 3 4 5 6 7 8 9 100Time s
Figure 8 The control input of double-fault NCS
the double-fault NCS is asymptotically stable when the 119867infinguaranteed cost controller is used This further demonstratesthe feasibility and effectiveness of the method proposed inthis paper
6 Conclusions
The issues of modelling and 119867infin guaranteed cost fault-tolerant control of double-fault networked control systemshave been addressedThe closed-loopmodel of a double-faultNCS is set up with regard to the influences of transmissiondelay packet dropout uncertain parameters and externaldisturbance In addition the piecewise delay method is pro-posed to reduce the conservatism when analysing the delay-dependent faulty system With the help of Lee Y Srsquos lemmathe sufficient condition of guaranteed cost fault-tolerantfor time-varying double-fault NCS is introduced using theLyapunov-Krasovskii theory and weighted technology Themethod of designing a guaranteed cost fault-tolerant con-troller for this NCS is given based on LMI Our next researchtask will be choosing more reasonable values of parameters120582119894 (119894 = 1 2 3 4 5 6 7) to reduce the conservatism further Ofcourse the study on scheduling policy of double-fault NCS isalso a challenge but indispensable work
Data Availability
The data used in this paper can be got by simulations
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was partly supported by National Nature Sci-ence Foundation of China under Grants 51875380 51375323and 61563022 Cooperative Innovation Fund-Prospective ofJiangsu Province under Grant BY2016044-01Major Programof Natural Science Foundation of Jiangxi Province Chinaunder Grant 20152ACB20009 High Level Talents of ldquoSix Tal-ent Peaksrdquo in Jiangsu Province China under Grant DZXX-046
References
[1] H Zhang Y Shi J Wang and H Chen ldquoA New Delay-compensation Scheme for Networked Control Systems inController Area Networksrdquo IEEE Transactions on IndustrialElectronics vol 65 no 9 pp 7239ndash7247 2018
[2] A Da Silva and C Kawan ldquoRobustness of critical bit rates forpractical stabilization of networked control systemsrdquo Automat-ica vol 93 pp 397ndash406 2018
[3] Q Zhu K Lu and Y Zhu ldquoGuaranteed cost control ofnetworked control systems under transmission control protocolwith active queue managementrdquo Asian Journal of Control vol18 no 4 pp 1546ndash1557 2016
[4] Q Zhu K Lu and Y Zhu ldquoHinfin Guaranteed Cost Control forNetworked Control Systems under Scheduling Policy Based onPredicted Errorrdquo Mathematical Problems in Engineering vol2014 Article ID 586029 12 pages 2014
[5] W H Chen J X Xu and Z H Guan ldquoGuaranteed cost controlfor uncertain Markovian jump systems with mode-dependenttime-delaysrdquo IEEE Transactions on Automatic Control vol 48no 12 pp 2270ndash2277 2003
[6] HM Soliman A DabroumM S Mahmoud andM SolimanldquoGuaranteed-cost reliable control with regional pole placementof a power systemrdquo Journal of 13e Franklin Institute vol 348no 5 pp 884ndash898 2011
[7] X Li and X-B Wu ldquoGuaranteed cost fault-tolerant controllerdesign of networked control systems under variable-periodsamplingrdquo Information Technology Journal vol 8 no 4 pp 537ndash543 2009
[8] L Zhang and G Orosz ldquoMotif-Based Design for ConnectedVehicle Systems in Presence of Heterogeneous ConnectivityStructures and Time Delaysrdquo IEEE Transactions on IntelligentTransportation Systems vol 17 no 6 pp 1638ndash1651 2016
[9] Z Li G Guo and Z Liu ldquoCommunication parameter designfor networked control systems with the slotted ALOHA accessprotocolrdquo Information Sciences vol 447 pp 205ndash215 2018
[10] K Lu G Jing and L Wang ldquoDistributed algorithm for solv-ing convex inequalitiesrdquo Institute of Electrical and ElectronicsEngineers Transactions on Automatic Control vol 63 no 8 pp2670ndash2677 2018
[11] Q Zhu K Lu and Y Zhu ldquoObserver-based feedback controlof networked control systems with delays and packet dropoutsrdquoJournal of Dynamic SystemsMeasurement andControl vol 138no 2 pp 1ndash8 2016
Mathematical Problems in Engineering 19
[12] Y Li H Li and W Sun ldquoEvent-triggered control for robust setstabilization of logical control networksrdquo Automatica vol 95pp 556ndash560 2018
[13] X Luan P Shi and F Liu ldquoStabilization of networked controlsystems with random delaysrdquo IEEE Transactions on IndustrialElectronics vol 58 no 9 pp 4323ndash4330 2011
[14] Y Zhang and J Jiang ldquoBibliographical review on reconfigurablefault-tolerant control systemsrdquo Annual Reviews in Control vol32 no 2 pp 229ndash252 2008
[15] N H Ei-Farra A Gani and P D Christofides ldquoFault-tolerantcontrol of process systems using communication networksrdquoAIChE Journal vol 51 no 6 pp 1665ndash1682 2005
[16] H R Karimi and H Gao ldquoNew delay-dependent exponentialHinfin synchronization for uncertain neural networks withmixedtime delaysrdquo IEEE Transactions on Systems Man and Cybernet-ics Part B Cybernetics vol 40 no 1 pp 173ndash185 2010
[17] Y N Guo Q Y Zhang D W Gong and J H Zhang ldquoRobustfault-tolerant control of networked control systems with time-varying delaysrdquoControl andDecision vol 23 no 6 pp 689ndash6922008
[18] Z Mao and B Jiang ldquoFault identification and fault-tolerantcontrol for a class of networked control systemsrdquo InternationalJournal of Innovative Computing Information and Control vol3 no 5 pp 1121ndash1130 2007
[19] C-X Yang Z-H Guan and J Huang ldquoStochastic fault tolerantcontrol of networked control systemsrdquo Journal of 13e FranklinInstitute vol 346 no 10 pp 1006ndash1020 2009
[20] Z Mao Y Pan B Jiang and W Chen ldquoFault Detectionfor a Class of Nonlinear Networked Control Systems withCommunication Constraintsrdquo International Journal of ControlAutomation and Systems vol 16 no 1 pp 256ndash264 2018
[21] A Qiu J Gu C Wen and J Zhang ldquoSelf-triggered faultestimation and fault tolerant control for networked controlsystemsrdquo Neurocomputing vol 272 no 1 pp 629ndash637 2018
[22] Q Zhu K Lu G Xie and Y Zhu ldquoGuaranteed Cost Fault-Tolerant Control for Networked Control Systems with SensorFaultsrdquoMathematical Problems in Engineering vol 2015 ArticleID 549347 9 pages 2015
[23] W Wu and Y Zhang ldquoEvent-triggered fault-tolerant controland scheduling codesign for nonlinear networked control sys-tems with medium-access constraint and packet disorderingrdquoInternational Journal of Robust and Nonlinear Control vol 28no 4 pp 1182ndash1198 2018
[24] X Xiao and X-J Li ldquoAdaptive dynamic programming method-based synchronisation control of a class of complex dynamicalnetworks with unknown dynamics and actuator faultsrdquo IETControl 13eory amp Applications vol 12 no 2 pp 291ndash298 2018
[25] PMhaskar AGani CMcFall PDChristofides and J FDavisldquoFault-tolerant control of nonlinear process systems subject tosensor faultsrdquo AIChE Journal vol 53 no 3 pp 654ndash668 2007
[26] M Liu P Shi L Zhang and X Zhao ldquoFault-tolerant controlfor nonlinear Markovian jump systems via proportional andderivative sliding mode observer techniquerdquo IEEE Transactionson Circuits and Systems I Regular Papers vol 58 no 11 pp2755ndash2764 2011
[27] S Li D Sauter C Aubrun and J Yame ldquoStability guaranteedactive fault-tolerant control of networked control systemsrdquoJournal of Control Science and Engineering vol 2008 Article ID189064 9 pages 2008
[28] X Y Luo M J Shang C L Chen and X P Guan ldquoGuaranteedcost active fault-tolerant control of networked control system
with packet dropout and transmission delayrdquo InternationalJournal of Automation and Computing vol 7 no 4 pp 509ndash5152010
[29] Q Zhu B Xie and Y Zhu ldquoGuaranteed Cost Control forMultirate Networked Control Systems with Both Time-Delayand Packet-Dropoutrdquo Mathematical Problems in Engineeringvol 2014 Article ID 637329 9 pages 2014
[30] R Manivannan R Samidurai J Cao and M Perc ldquoDesign ofResilient Reliable Dissipativity Control for Systems with Actu-ator Faults and Probabilistic Time-Delay Signals via Sampled-Data Approachrdquo IEEE Transactions on Systems Man andCybernetics Systems 2018
[31] R Manivannan R Samidurai J Cao A Alsaedi and F EAlsaadi ldquoNon-Fragile Extended Dissipativity Control Designfor Generalized Neural Networks with Interval Time-DelaySignalsrdquo Asian Journal of Control 2019
[32] Q Gao and N Olgac ldquoBounds of imaginary spectra of LTIsystems in the domain of two of the multiple time delaysrdquoAutomatica vol 72 pp 235ndash241 2016
[33] Q Gao A S Kammer U Zalluhoglu and N Olgac ldquoCriticaleffects of the polarity change in delayed states within anLTI dynamics with multiple delaysrdquo Institute of Electrical andElectronics Engineers Transactions onAutomatic Control vol 60no 11 pp 3018ndash3022 2015
[34] Q Gao Z Zhang and C Yang ldquoSign inverting control andits important properties for multiple time-delayed systemsrdquo inProceedings of the 10th ASME Dynamic Systems and ControlConference pp 979ndash984 Virginia USA 2017
[35] Y M Zhang and J Jiang ldquoActive fault-tolerant control systemagainst partial actuator failuresrdquo IEE Proceedings Control13eoryand Applications vol 149 no 1 pp 95ndash104 2002
[36] G Garcia J Bernussou andD Arzelier ldquoRobust stabilization ofdiscrete-time linear systems with norm-bounded time-varyinguncertaintyrdquo Systems amp Control Letters vol 22 no 5 pp 327ndash339 1994
[37] Y Wang L Xie and C E de Souza ldquoRobust control of a classof uncertain nonlinear systemsrdquo Systems amp Control Letters vol19 no 2 pp 139ndash149 1992
[38] D Yue E Tian and Y Zhang ldquoA piecewise analysis methodto stability analysis of linear continuousdiscrete systems withtime-varying delayrdquo International Journal of Robust and Non-linear Control vol 19 no 13 pp 1493ndash1518 2009
[39] X-J Jing D-L Tan and Y-C Wang ldquoAn LMI approach tostability of systems with severe time-delayrdquo IEEE Transactionson Automatic Control vol 49 no 7 pp 1192ndash1195 2004
[40] D Yue Q-L Han and J Lam ldquoNetwork-based robust Hinfincontrol of systems with uncertaintyrdquo Automatica vol 41 no 6pp 999ndash1007 2005
[41] Z Wang F Yang D W C Ho and X Liu ldquoRobust Hinfincontrol for networked systemswith randompacket lossesrdquo IEEETransactions on Systems Man and Cybernetics Part B vol 37no 4 pp 916ndash924 2007
[42] M S Mahmoud ldquoControl of uncertain state-delay systemsguaranteed cost approachrdquo IMA Journal of Mathematical Con-trol and Information vol 18 no 1 pp 109ndash128 2001
[43] D Yue C Peng andG Y Tang ldquoGuaranteed cost control of lin-ear systems over networks with state and input quantisationsrdquoIEE Proceedings Control 13eory and Applications vol 153 no 6pp 658ndash664 2006
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

4 Mathematical Problems in Engineering
Naturally the time-varying fault indicator matrices can berewritten as
119866 (119905 minus 120578 (119905)) = 1198660 (119868 + 119871 (119905 minus 120578 (119905))Θ (119905) = Θ0 (119868 + Γ (119905)) (19)
Inserting (19) into (11) we have
119906 (119905)= Θ0 (119868 + Γ (119905)) 1198701198660 (119868 + 119871 (119905 minus 120578 (119905))) 119909 (119905 minus 120578 (119905)) (20)
Then the new model of double-fault NCS can be obtained asfollows
1199091015840 (119905) = (119860 + Δ119860) 119909 (119905) + (119861 + Δ119861) Θ0 (119868 + Γ (119905))sdot 1198701198660 (119868 + 119871 (119905 minus 120578 (119905))) 119909 (119905 minus 120578 (119905)) + 119867120596 (119905)
119910 (119905) = 119862119909 (119905)(21)
Remark 3 The networked control systems in faulty case canbe modelled as system (21) with the effects of time-varyingdelay 120578(119905)whose upper bound and lower bound are describedin (12) Unlike the previousmodels [17 21 27 35] this modelis related to both sensor faults and actuator faults the faultsare time-varying which are reflected by the time-varyingparameters 119871(119905 minus 120578(119905)) and Γ(119905) From (17) we undoubtedlyknow the time-varying parameter 119871(119905 minus 120578(119905)) satisfies 119871119879119871 =1198712 le 119868 while the parameter Γ(119905) satisfies Γ119879Γ = Γ2 le 119868Remark 4 From the descriptions of faults matrices weundoubtedly know if 119897119894 = 11198920119894 minus 1 (119894 = 1 2 sdot sdot sdot 119899) we canobtain 119892119894 = 1 and 1198660(119868 + 119871(119905 minus 120578(119905))) = 119868 and then model (21)is an actuator fault model Similarly if 120582119894 = (120575119895 minus1205750119895)1205750119895 (119895 =1 2 sdot sdot sdot 119898) we can obtain 120575119895 = 1 and Θ0(119868 + Γ(119905)) = 119868 andthen model (21) represents a sensor fault model Thereforemodel (21) of a double-fault NCS contains cases of single-faults and the single-faults are a special formof double-faults
In the following section a fundamental preliminary resultis presented to guarantee the performance of a double-faultNCS based on the delay information
3 Performance Analysis of Double-Fault NCS
For the system model (21) established in Section 2 the costfunction is given as follows
119869 = intinfin0
[119909119879 (119905) 1198781119909 (119905) + 119906119879 (119905) 1198782119906 (119905)] 119889119905= intinfin0
119909119879 (119905) 1198781119909 (119905)+ [Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) 119909 (119905 minus 120578 (119905))]119879sdot 1198782Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) 119909 (119905 minus 120578 (119905)) 119889119905
(22)
where 1198781 and 1198782 are symmetric positive definite matrices
Definition 5 Formodel (21) and its cost function (22) if thereexists a control gain matrix 119870 satisfying the conditions
(1) the closed-loop system is asymptotically stable when120596(119905) = 0(2) for any zero initial condition and any nonzero vector120596(119905) isin 1198712[0 infin) given 120574 gt 0 the output 119910(119905) satisfies119910(119905)2 le 120574120596(119905)2(3) there exists a constant 1198690 and the cost function definedas (22) satisfies 119869infin le 1198690
then matrix 119870 is the 119867infin guaranteed cost control gain ofdouble-faults NCS
To analyse the stability of the system expediently thefollowing lemmas are introduced
Lemma 6 (see [36 37]) For any matrices119882119872119873 119865(119905) withFT119865 le 119868 and any scalar 120576 gt 0 the inequality holds as
119882 + 119872119865 (119905) 119873 + 119873119879119865119879 (119905) 119872119879le 119882 + 120576119872119872119879 + 120576minus1119873119879119873 (23)
Lemma 7 (see [38]) If 1205781 le 120578(119905) le 1205782 for any matrices Π1Π2 and Φ the following inequalities are equivalent(1) [120578(119905) minus 1205781]Π1 + [1205782 minus 120578(119905)]Π2 + Φ lt 0(2) [1205782 minus 1205781]Π1 + Φ lt 0 [1205782 minus 1205781]Π2 + Φ lt 0The fundamental preliminary result is presented in the
following theorem
Theorem 8 Given symmetric positive definite matrices 1198781 and1198782 a set of constant 120578119898 120578119872 1205881 gt 0 1205882 gt 0 and 120572 =(120578119872 minus 120578119898)2 If there exists a set of symmetric positive definitematrices 119877119894 (119894 = 1 2 3) and matrix 119875 gt 0 as well as matrices119872119897120573 1198722120573 119873119897120573 1198732120573 119880120573 (120573 = 1 2 3 4 5 6 7 8) 119870 and a setof constants 120576 gt 0 and 120574 gt 0 satisfying the LMIs
[[[[[[[[[[[[[[[[[
minus120576119868 0 0 0 120576119879lowast minus (1198781 + 119862119879119862)minus1 0 0 lowast lowast minus1198782minus1 0 Σlowast lowast lowast minusΓ119897 Ω119897119896lowast lowast lowast lowast Φ119897lowast lowast lowast lowast lowastlowast lowast lowast lowast lowastlowast lowast lowast lowast lowastlowast lowast lowast lowast lowastlowast lowast lowast lowast lowast
997888rarr
0 0 0 0 00 0 0 0 00 Θ0119870119866 0 Θ0 00 0 0 0 0119879 Θ 0 Δ 119879minus120576119868 1198642Θ01198701198660 0 1198642Θ0 0lowast minus12058811198805 0 0 (1198701198660)119879lowast lowast minus1205881minus11198805minus1 0 0lowast lowast lowast minus1205882119868 0lowast lowast lowast lowast minus1205882minus1119868
]]]]]]]]]]]]]]]]]
lt 0
119897 = 1 2 119896 = 1 2
(24)
where
Mathematical Problems in Engineering 5
Φ1 =
[[[[[[[[[[[[[[[[[[[
minus1198771 + 1198801119860 + (1198801119860)119879 1198771 + (1198802119860)119879 + 11987211 (1198803119860)119879 minus 11987311 (1198804119860)119879lowast minus1198771 + 11987212 + 11987212119879 11987213119879 minus 11987312 11987214119879lowast lowast minus1198773120572 minus 11987312 minus 11987312119879 1198773120572 minus 11987314119879lowast lowast lowast minus1198773120572lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
119875 minus 1198801 + (1198805119860)119879 Ψ1 + (1198806119860)119879 (1198807119860)119879 + (1198808119860)119879 + 1198801119867 0minus1198802 + 11987215119879 Ψ2 + 11987216119879 1198802119867 + 11987217119879 + 11987218119879 0minus1198803 minus 11987315119879 Ψ3 minus 11987316119879 1198803119867 minus 11987317119879 minus 11987318119879 0
minus1198804 Ψ4 1198804119867 012057811989821198771 + 120572 (1198772 + 1198773) minus 1198805 minus 1198805119879 Ψ5 minus 1198806119879 1198805119867 minus 1198807119879 minus 1198808119879 0
lowast Ψ6 Ξ 0lowast lowast 1198807119867 + 1198808119867 + (1198807119867)119879 + (1198808119867)119879 0lowast lowast lowast minus1205742119868
]]]]]]]]]]]]]]]]]]]
Φ2 =
[[[[[[[[[[[[[[[[[[[[
minus1198771 + 1198801119860 + (1198801119860)119879 1198771 + (1198802119860)119879 (1198803119860)119879 + 11987221 (1198804119860)119879 minus 11987321lowast minus1198771 minus 1198772120572 1198772120572 + 11987222 minus11987322lowast lowast minus1198772120572 + 11987223 + 11987223119879 11987224119879 minus 11987323lowast lowast lowast minus11987324 minus 11987324119879lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
119875 minus 1198801 + (1198805119860)119879 Ψ11015840 + (1198806119860)119879 (1198807119860)119879 + (1198808119860)119879 + 1198801119867 0minus1198802 Ψ21015840 1198802119867 0
minus1198803 + 11987225119879 Ψ31015840 + 11987226119879 1198803119867 + 11987227119879 + 11987228119879 0minus1198804 minus 11987325119879 Ψ41015840 minus 11987326119879 1198804119867 minus 11987327119879 minus 11987328119879 0
12057811989821198771 + 120572 (1198772 + 1198773) minus 1198805 minus 1198805119879 Ψ51015840 minus 1198806119879 1198805119867 minus 1198807119879 minus 1198808119879 0lowast Ψ61015840 Ξ1015840 0lowast lowast 1198807119867 + 1198808119867 + (1198807119867)119879 + (1198808119867)119879 0lowast lowast lowast minus1205742119868
]]]]]]]]]]]]]]]]]]]]]
Γ1 = 1205721198772Γ2 = 1205721198773
Ω11 = 1205721198721119879
6 Mathematical Problems in Engineering
Ω12 = 1205721198731119879Ω21 = 1205721198722119879Ω22 = 1205721198732119879
1198721119879 = [11987211119879 11987212119879 11987213119879 11987214119879 11987215119879 11987216119879 11987217119879 11987218119879] 1198722119879 = [11987221119879 11987222119879 11987223119879 11987224119879 11987225119879 11987226119879 11987227119879 11987228119879]
1198731119879 = [11987311119879 11987312119879 11987313119879 11987314119879 11987315119879 11987316119879 11987317119879 11987318119879] 1198732119879 = [11987321119879 11987322119879 11987323119879 11987324119879 11987325119879 11987326119879 11987327119879 11987328119879]
Ξ = (1198807119861Θ01198701198660)119879 + (1198808119861Θ01198701198660)119879 + 1198806119867 minus 11987217119879 minus 11987218119879 + 11987317119879 + 11987318119879Ψ119894 = 119880119894119861Θ01198701198660 + 1198731119894 minus 1198721119894 (119894 = 1 2 3 4 5)
Ψ6 = 1198806119861Θ01198701198660 + (1198806119861Θ01198701198660)119879 minus 11987216 minus 11987216119879 + 11987316 + 11987316119879Ξ1015840 = (1198807119861Θ01198701198660)119879 + (1198808119861Θ01198701198660)119879 + 1198806119867 minus 11987227119879 minus 11987228119879 + 11987327119879 + 11987328119879
Ψ1198941015840 = 119880119894119861Θ01198701198660 + 1198732119894 minus 1198722119894 (119894 = 1 2 3 4 5) Ψ10158406 = 1198806119861Θ01198701198660 + (1198806119861Θ01198701198660) 119879 minus 11987226 minus 11987226119879 + 11987326 + 11987326119879
= [(1198801119863)119879 (1198802119863)119879 (1198803119863)119879 (1198804119863)119879 (1198805119863)119879 (1198806119863)119879 (1198807119863)119879 + (1198808119863)119879 0]119879 = [1198641 0 0 0 0 1198642Θ01198701198660 0 0]
0 = [0 0 0 0 0 119868 0 0]119879 = [119868 0 0 0 0 0 0 0]
Θ = [(1198801119861Θ01198701198660)119879 (1198802119861Θ01198701198660)119879 (1198803119861Θ01198701198660)119879 (1198804119861Θ01198701198660)119879 (1198805119861Θ01198701198660)119879 (1198806119861Θ01198701198660)119879 (11988071198611198701198660)119879 + (11988081198611198701198660)119879 0]119879 Δ = [(1198801119861Θ0)119879 (1198802119861Θ0)119879 (1198803119861Θ0)119879 (1198804119861Θ0)119879 (1198805119861Θ0)119879 (1198806119861Θ0)119879 (1198807119861Θ0)119879 + (1198808119861Θ0)119879 0]119879
= [0 0 0 0 0 1198701198660 0 0] Σ = [0 0 0 0 0 Θ01198701198660 0 0]
(25)
then model (21) is asymptotically stable with the 119867infin normbound 120574 In addition the upper bound 1198690 of cost function 119869 isgiven as
1198690 = 119909119879 (0119905) 119875119909 (0) + 120578119898 int0minus120578119898
int0119904
1199091015840119879 (120591) 11987711199091015840 (120591) 119889119904119889120591+ intminus120578119898minus1205781
int0119904
1199091015840119879 (120591) 11987721199091015840 (120591) 119889119904119889120591+ intminus1205781minus120578119872
int0119904
1199091015840119879 (120591) 11987731199091015840 (120591) 119889119904119889120591
(26)
Proof First with the definition of 120572 = (120578119872 minus 120578119898)2 and 1205781 =120578119898+120572 the interval of delay is distributed into two subintervalsas follows
120578 (119905) isin [120578119898 120578119872] = [120578119898 1205781] cup [1205781 120578119872] (27)
Then we consider the Lyapunov-Krasovskii functional asfollows
V (119905) = 119909119879 (119905) 119875119909 (119905)+ 120578119898 int119905
119905minus120578119898
int119905119904
1199091015840119879 (120591) 11987711199091015840 (120591) 119889119904119889120591+ int119905minus120578119898119905minus1205781
int119905119904
1199091015840119879 (120591) 11987721199091015840 (120591) 119889119904119889120591+ int119905minus1205781119905minus120578119872
int119905119904
1199091015840119879 (120591) 11987731199091015840 (120591) 119889119904119889120591
(28)
where matrix 119875 satisfies 119875 gt 0 and 119877119894 (119894 = 1 2 3)are symmetric positive definite matrices with appropriatedimensions For the convenience of writing we denote 119871 =119871(119905 minus 120578(119905)) and Γ = Γ(119905) in the following expressions
Mathematical Problems in Engineering 7
Calculating the derivative of Lyapunov-Krasovskii functionand based on (21) we have
V1015840 (119905) = 2119909119879 (119905) 1198751199091015840 (119905) + 12057821198981199091015840119879 (119905) 11987711199091015840 (119905)minus 120578119898 int119905
119905minus120578119898
1199091015840119879 (119904) 11987711199091015840 (119904) 119889119904 + (1205781 minus 120578119898) 1199091015840119879 (119905)sdot 11987721199091015840 (119905) minus int119905minus120578119898
119905minus1205781
1199091015840119879 (119904) 11987721199091015840 (119904) 119889119904 + (120578119872 minus 1205781)sdot 1199091015840119879 (119905) 11987731199091015840 (119905) minus int119905minus1205781
119905minus120578119872
1199091015840119879 (119904) 11987731199091015840 (119904) 119889119904+ 2 [120576119879 (119905) 120596119879 (119905)] 119880 [(119860 + Δ119860) 119909 (119905)+ (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) 119909 (119905 minus 120578 (119905))+ 119867120596 (119905) minus 1199091015840 (119905)]
(29)
where V1015840(119905) = lim sup120575997888rarr0+(1120575)[V(119905 + 120575) minus V(119905)] [39]Based on Jessenrsquos inequality we have
minus 120578119898 int119905119905minus120578119898
1199091015840119879 (119904) 11987711199091015840 (119904) 119889119904 le [119909119879 (119905) 119909119879 (119905 minus 120578119898)]sdot [minus1198771 11987711198771 minus1198771] [ 119909 (119905)
119909 (119905 minus 120578119898)](30)
minus int119905minus120578119898119905minus1205781
1199091015840119879 (119904) 11987721199091015840 (119904) 119889119904le 1120572 [119909119879 (119905 minus 120578119898) 119909119879 (119905 minus 1205781)]sdot [minus1198772 11987721198772 minus1198772] [119909 (119905 minus 120578119898)119909 (119905 minus 1205781)]
(31)
minus int119905minus1205781119905minus120578119872
1199091015840119879 (119904) 11987731199091015840 (119904) 119889119904le 1120572 [119909119879 (119905 minus 1205781) 119909119879 (119905 minus 120578119872)]sdot [minus1198773 11987731198773 minus1198773] [ 119909 (119905 minus 1205781)119909 (119905 minus 120578119872)]
(32)
where 120572 = (120578119872 minus 120578119898)2 For the convenience of the followingdiscussion we define
120576119879 (119905) = [119909119879 (119905) 119909119879 (119905 minus 120578119898) 119909119879 (119905 minus 1205781) 119909119879 (119905 minus 120578119872)sdot 1199091015840119879 (119905) 119909119879 (119905 minus 120578 (119905)) 120596119879 (119905)] (33)
Case 1 If 120578(119905) isin [120578119898 1205781] weighted technology based on theprinciple of Newton-Leibniz is introduced as follows
2 [120576119879 (119905) 120596119879 (119905)] 1198721 [119909 (119905 minus 120578119898) minus 119909 (119905 minus 120578 (119905))minus int119905minus120578119898119905minus120578(119905)
1199091015840119879 (119904) 119889119904] = 0(34)
and
2 [120576119879 (119905) 120596119879 (119905)] 1198731 [119909 (119905 minus 120578 (119905)) minus 119909 (119905 minus 1205781)minus int119905minus120578(119905)119905minus1205781
1199091015840119879 (119904) 119889119904] = 0(35)
Because 1198772 gt 0 we haveminus 2 [120576119879 (119905) 120596119879 (119905)] 1198721 int119905minus120578119898
119905minus120578(119905)1199091015840 (119904) 119889119904 le (120578 (119905) minus 120578119898)
sdot [120576119879 (119905) 120596119879 (119905)] 1198721119877minus12 1198721119879 [120576119879 (119905) 120596119879 (119905)]119879+ int119905minus120578119898119905minus120578(119905)
1199091015840119879 (119904) 11987721199091015840 (119904) 119889119904(36)
and
minus 2 [120576119879 (119905) 120596119879 (119905)] 1198731 int119905minus120578(119905)119905minus1205781
1199091015840 (119904) 119889119904 le (1205781 minus 120578 (119905))sdot [120576119879 (119905) 120596119879 (119905)] 1198731119877minus12 1198731119879 [120576119879 (119905) 120596119879 (119905)]119879+ int119905minus120578(119905)119905minus1205781
1199091015840119879 (119904) 11987721199091015840 (119904) 119889119904(37)
Therefore
minus 2 [120576119879 (119905) 120596119879 (119905)] 1198721 int119905minus120578119898119905minus120578(119905)
1199091015840 (119904) 119889119904minus 2 [120576119879 (119905) 120596119879 (119905)] 1198731 int119905minus120578(119905)
119905minus1205781
1199091015840 (119904) 119889119904le (120578 (119905) minus 120578119898)sdot [120576119879 (119905) 120596119879 (119905)] 1198721119877minus12 1198721119879 [120576119879 (119905) 120596119879 (119905)]119879+ (1205781 minus 120578 (119905))sdot [120576119879 (119905) 120596119879 (119905)] 1198731119877minus12 1198731119879 [120576119879 (119905) 120596119879 (119905)]119879+ int119905minus120578119898119905minus1205781
1199091015840119879 (119904) 11987721199091015840 (119904) 119889119904
(38)
In addition 119910119879(119905)119910(119905)minus1205742120596119879(119905)120596(119905) both on the left and rightsides of equality (29) and 119909119879(119905)1198781119909(119905) + [Θ0(119868 + Γ)1198701198660(119868 +119871)119909(119905 minus 120578(119905))]1198791198782Θ0(119868 + Γ)1198701198660(119868 + 119871)119909(119905 minus 120578(119905)) on the rightof the equal sign ldquo=rdquo and then inserting (30) (32) (34) (35)(38) to the obtained inequality we have
V1015840 (119905) + 119910119879 (119905) 119910 (119905) minus 1205742120596119879 (119905) 120596 (119905)le [120576119879 (119905) 120596119879 (119905)] Φ1 [120576119879 (119905) 120596119879 (119905)]119879+ (120578 (119905) minus 120578119898)sdot [120576119879 (119905) 120596119879 (119905)] 1198721119877minus12 1198721119879 [120576119879 (119905) 120596119879 (119905)]119879+ (1205781 minus 120578 (119905))sdot [120576119879 (119905) 120596119879 (119905)] 1198731119877minus12 1198731119879 [120576119879 (119905) 120596119879 (119905)]119879
(39)
where
8 Mathematical Problems in Engineering
Φ1 =
[[[[[[[[[[[[[[[[[[[[
Ξ1 1198771 + [1198802 (119860 + Δ119860)]119879 + 11987211 [1198803 (119860 + Δ119860)]119879 minus 11987311 [1198804 (119860 + Δ119860)]119879lowast minus1198771 + 11987212 + 11987212119879 11987213119879 minus 11987312 11987214119879lowast lowast minus1198773120572 minus 11987312 minus 11987312119879 1198773120572 minus 11987314119879lowast lowast lowast minus1198773120572lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
119875 minus 1198801 + [1198805 (119860 + Δ119860)]119879 Ψ1 + [1198806 (119860 + Δ119860)]119879 [1198807 (119860 + Δ119860)]119879 + [1198808 (119860 + Δ119860)]119879 + 1198801119867 0minus1198802 + 11987215119879 Ψ2 + 11987216119879 1198802119867 + 11987217119879 + 11987218119879 0minus1198803 minus 11987315119879 Ψ3 minus 11987316119879 1198803119867 minus 11987317119879 minus 11987318119879 0
minus1198804 Ψ4 1198804119867 012057811989821198771 + 120572 (1198772 + 1198773) minus 1198805 minus 1198805119879 Ψ5 minus 1198806119879 1198805119867 minus 1198807119879 minus 1198808119879 0
lowast Ψ6 Ξ2 0lowast lowast 1198807119867 + 1198808119867 + (1198807119867)119879 + (1198808119867)119879 0lowast lowast lowast minus1205742119868
]]]]]]]]]]]]]]]]]]]
Ξ1 = minus1198771 + 1198801 (119860 + Δ119860) + [1198801 (119860 + Δ119860)]119879 + 119862119879119862 + 1198781Ξ2 = [1198807 (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 + [1198808 (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 + 1198806119867 minus 11987217119879 minus 11987218119879 + 11987317119879
+ 11987318119879Ψ119894 = 119880119894 (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) + 1198731119894 minus 1198721119894 (119894 = 1 2 3 4 5) Ψ6 = 1198806 (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)
+ [1198806 (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 [Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 1198782Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) minus 11987216 minus 11987216119879 + 11987316+ 11987316119879
(40)
ifΦ1 + (120578 (119905) minus 120578119898) 1198721119877minus12 1198721119879
+ (1205781 minus 120578 (119905)) 1198731119877minus12 1198731119879 lt 0 (41)
Next we need to acquire the inequality (24) through atransformation based on inequality (41) which is equivalentto the following inequalities by applying the theory given inLemma 7 and the Schur complement also used byD Yue [38]in the previous study
[minus (1205781 minus 120578119898)minus1 1198772 1198721119879lowast Φ1 ] lt 0 (42)
[minus (1205781 minus 120578119898)minus1 1198772 1198731119879lowast Φ1 ] lt 0 (43)
Premultiplying and postmultiplying the inequalities above bydiag((1205781 minus 120578119898)119868 119868) we have
[minus1205721198772 Ω1119896lowast Φ1 ] lt 0 (44)
Applying the theory of the Schur complement to inequality(44) we have
[[[[[[[
minus (1198781 + 119862119879119862)minus1 0 0 lowast minus1198782minus1 0 Σlowast lowast minus1205721198772 Ω1119896lowast lowast lowast Φ10158401
]]]]]]]
lt 0 (45)
where
Mathematical Problems in Engineering 9
Φ11015840 =
[[[[[[[[[[[[[[[[[[[[
Ξ11015840 1198771 + [1198802 (119860 + Δ119860)]119879 + 11987211 [1198803 (119860 + Δ119860)]119879 minus 11987311 [1198804 (119860 + Δ119860)]119879lowast minus1198771 + 11987212 + 11987212119879 11987213119879 minus 11987312 11987214119879lowast lowast minus1198773120572 minus 11987312 minus 11987312119879 1198773120572 minus 11987314119879lowast lowast lowast minus1198773120572lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
119875 minus 1198801 + [1198805 (119860 + Δ119860)]119879 Ψ1 + [1198806 (119860 + Δ119860)]119879 [1198807 (119860 + Δ119860)]119879 + [1198808 (119860 + Δ119860)]119879 + 1198801119867 0minus1198802 + 11987215119879 Ψ2 + 11987216119879 1198802119867 + 11987217119879 + 11987218119879 0minus1198803 minus 11987315119879 Ψ3 minus 11987316119879 1198803119867 minus 11987317119879 minus 11987318119879 0minus1198804 Ψ4 1198804119867 0
12057811989821198771 + 120572 (1198772 + 1198773) minus 1198805 minus 1198805119879 Ψ5 minus 1198806119879 1198805119867 minus 1198807119879 minus 1198808119879 0lowast Ψ61015840 Ξ2 0lowast lowast 1198807119867 + 1198808119867 + (1198807119867)119879 + (1198808119867)119879 0lowast lowast lowast minus1205742119868
]]]]]]]]]]]]]]]]
Ξ11015840 = minus1198771 + 1198801 (119860 + Δ119860) + [1198801 (119860 + Δ119860)]119879Ψ61015840 = 1198806 (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) + [1198806 (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 minus 11987216 minus 11987216119879 + 11987316 + 11987316119879
Σ = [0 0 0 0 0 Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) 0 0]
(46)
Inequality (44) can be written as
[[[[[
minus (1198781 + 119862119879119862)minus1 0 0 lowast minus1198782minus1 0 Σlowast lowast minus1205721198772 Ω1119896lowast lowast lowast Φ101584010158401]]]]]
+ [[[[
000119863]]]]
119865 [[[[
000119864119879
]]]]
119879
+ [[[[
000119864119879
]]]]
119865119879[[[[[
000
]]]]]
119879
lt 0(47)
where
Φ110158401015840 =
[[[[[[[[[[[[[[[[[[[[
minus1198771 + 1198801119860 + (1198801119860)119879 1198771 + (1198802119860)119879 + 11987211 (1198803119860)119879 minus 11987311 (1198804119860)119879lowast minus1198771 + 11987212 + 11987212119879 11987213119879 minus 11987312 11987214119879lowast lowast minus1198773120572 minus 11987312 minus 11987312119879 1198773120572 minus 11987314119879lowast lowast lowast minus1198773120572lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
10 Mathematical Problems in Engineering
119875 minus 1198801 + (1198805119860)119879 Ψ110158401015840 + (1198806119860)119879 (1198807119860)119879 + (1198808119860)119879 + 1198801119867 0minus1198802 + 11987215119879 Ψ210158401015840 + 11987216119879 1198802119867 + 11987217119879 + 11987218119879 0minus1198803 minus 11987315119879 Ψ310158401015840 minus 11987316119879 1198803119867 minus 11987317119879 minus 11987318119879 0
minus1198804 Ψ41015840 1198804119867 012057811989821198771 + 120572 (1198772 + 1198773) minus 1198805 minus 1198805119879 Ψ510158401015840 minus 1198806119879 1198805119867 minus 1198807119879 minus 1198808119879 0
lowast Ψ610158401015840 Ξ210158401015840 0lowast lowast 1198807119867 + 1198808119867 + (1198807119867)119879 + (1198808119867)119879 0lowast lowast lowast minus1205742119868
]]]]]]]]]]]]]]]]]]]
Ξ210158401015840 = [1198807119861Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 + [1198808119861Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 + 1198806119867 minus 11987217119879 minus 11987218119879 + 11987317119879 + 11987318119879Ψ11989410158401015840 = 119880119894119861Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) + 1198731119894 minus 1198721119894 (119894 = 1 2 3 4 5)
Ψ61015840 = 1198806119861Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) + [1198806119861Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 minus 11987216 minus 11987216119879 + 11987316 + 11987316119879 = [1198641 0 0 0 0 1198642Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) 0 0]
(48)
With the definition of scalar 120576 gt 0 we apply the theory givenin Lemma 6 to (47) also used by Y Wang and L Xie [37]in which the uncertain matrix 119865 can be eliminated and asufficient condition of (47) is obtained
[[[[[[[
minus (1198781 + 119862119879119862)minus1 0 0 lowast minus1198782minus1 0 Σlowast lowast minus1205721198772 Ω1119896lowast lowast lowast Φ101584010158401
]]]]]]]
+ 120576 [[[[[[
01198630
]]]]]]
[[[[[[
01198630
]]]]]]
119879
+ 120576minus1[[[[[[[
000
119879
]]]]]]]
[[[[[[[
000
119879
]]]]]]]
119879
lt 0
(49)
Applying the Schur complement to inequality (49) we have
[[[[[[[[[[[[[[
minus120576119868 0 0 0 120576119879 0lowast minus (1198781 + 119862119879119862)minus1 0 0 0lowast lowast minus1198782minus1 0 Σ 0lowast lowast lowast minus1205721198772 Ω1119896 0lowast lowast lowast lowast Φ101584010158401 119879lowast lowast lowast lowast lowast minus120576119868
]]]]]]]]]]]]]]
lt 0
(50)
There exists 1205881 gt 0 1205882 gt 0 Based on (17) and Remark 3 inSection 2 we know that 119871119879119871 le 119868 and Γ119879Γ le 119868 According
to expressions (47) (49) and (50) we obviously know that1198805 gt 0 Using Lemma 6 again we have
Θ0 (119868 + Γ) 1198701198660119871 + [Θ0 (119868 + Γ) 1198701198660119871]119879le 1205881minus1Θ0 (119868 + Γ) 11987011986601198805minus1 [Θ0 (119868 + Γ) 1198701198660]119879
+ 12058811198805(51)
and
Θ0Γ1198701198660 + (Θ0Γ1198701198660)119879le 1205882minus1Θ0Θ0119879 + 1205882 (1198701198660)1198791198701198660
(52)
Based on inequalities (51) (52) and the Schur complementwe know inequality (24) is a sufficient condition of inequality(50) while inequality (50) is equivalent to inequality (41)Therefore we can undoubtedly obtain inequality (24) asa sufficient condition of inequality (41) Thus based oninequality (39) and (41) we know(1) if120596(119905) equiv 0 obviously we have V1015840(119905) lt 0 so system (21)is asymptotically stable(2) if 119909(0) equiv 0 we know V(0) = 0 In addition it can beobtained that V(infin) ge 0
Therefore
intinfin0
V1015840 (119905) + 119910119879 (119905) 119910 (119905) minus 1205742120596119879 (119905) 120596 (119905) 119889119905= V (infin) + intinfin
0119910119879 (119905) 119910 (119905) minus 1205742120596119879 (119905) 120596 (119905) 119889119905 lt 0
(53)
Thus
intinfin0
119910119879 (119905) 119910 (119905) lt intinfin0
1205742120596119879 (119905) 120596 (119905) 119889119905 (54)
Mathematical Problems in Engineering 11
Because 120596(119905) isin 1198712[0 infin) we have1003817100381710038171003817119910 (119905)1003817100381710038171003817 le 120574 120596 (119905)119879 (55)
It is known that model (21) is asymptotically stable with the119867infin norm bound 120574Moreover according to (39) and (41) we have
V1015840 (119905) le minus119909119879 (119905) 1198781119909 (119905)minus [Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) 119909 (119905 minus 120578 (119905))]119879
sdot 1198782Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) 119909 (119905 minus 120578 (119905))(56)
Through the integral operation it can be determined that119869 le V(0) In addition by inserting 119905 = 0 into the Lyapunov-Krasovskii function shown as expression (28) the upperbound of cost function 119869 can be obtained and shown asexpression (26) Therefore the theorem is verified if 119897 = 1Case 2 If 120578(119905) isin [1205781 120578119872] weighted technology based on theprinciple of Newton-Leibniz is introduced as follows
2 [120576119879 (119905) 120596119879 (119905)] 1198722 [119909 (119905 minus 1205781) minus 119909 (119905 minus 120578 (119905))minus int119905minus1205781119905minus120578(119905)
1199091015840119879 (119904) 119889119904] = 0(57)
2 [120576119879 (119905) 120596119879 (119905)] 1198732 [119909 (119905 minus 120578 (119905)) minus 119909 (119905 minus 120578119872)minus int119905minus120578(119905)119905minus120578119872
1199091015840119879 (119904) 119889119904] = 0(58)
Because 1198773 gt 0 we have
minus 2 [120576119879 (119905) 120596119879 (119905)] 1198722 int119905minus1205781119905minus120578(119905)
1199091015840 (119904) 119889119904 le (120578 (119905) minus 1205781)sdot [120576119879 (119905) 120596119879 (119905)] 1198722119877minus13 1198722119879 [120576119879 (119905) 120596119879 (119905)]119879+ int119905minus1205781119905minus120578(119905)
1199091015840119879 (119904) 11987731199091015840 (119904) 119889119904(59)
minus 2 [120576119879 (119905) 120596119879 (119905)] 1198732 int119905minus120578(119905)119905minus120578119872
1199091015840 (119904) 119889119904 le (120578119872 minus 120578 (119905))sdot [120576119879 (119905) 120596119879 (119905)] 1198732119877minus13 1198731119879 [120576119879 (119905) 120596119879 (119905)]119879+ int119905minus120578(119905)119905minus120578119872
1199091015840119879 (119904) 11987731199091015840 (119904) 119889119904(60)
Therefore
minus 2 [120576119879 (119905) 120596119879 (119905)] 1198722 int119905minus1205781119905minus120578(119905)
1199091015840 (119904) 119889119904
minus 2 [120576119879 (119905) 120596119879 (119905)] 1198732 int119905minus120578(119905)119905minus120578119872
1199091015840 (119904) 119889119904le (120578 (119905) minus 1205781)sdot [120576119879 (119905) 120596119879 (119905)] 1198722119877minus13 1198722119879 [120576119879 (119905) 120596119879 (119905)]119879+ (120578119872 minus 120578 (119905))sdot [120576119879 (119905) 120596119879 (119905)] 1198732119877minus13 1198732119879 [120576119879 (119905) 120596119879 (119905)]119879
+ int119905minus1205781119905minus120578119872
1199091015840119879 (119904) 11987731199091015840 (119904) 119889119904
(61)
In addition 119910119879(119905)119910(119905)minus1205742120596119879(119905)120596(119905) both on the left and rightsides of equality (29) and 119909119879(119905)1198781119909(119905) + [Θ0(119868 + Γ)1198701198660(119868 +119871)119909(119905minus120578(119905))]1198791198782Θ0(119868+Γ)1198701198660(119868+119871)119909(119905minus120578(119905)) on the right sideof equal sign ldquo=rdquo By inserting (30) (31) (57) (58) and (61)into the obtained inequality the item minus int119905minus1205781
119905minus1205781198721199091015840119879(119904)11987731199091015840(119904)119889119904
can be offset while the item minus int119905minus120578119898119905minus1205781
1199091015840119879(119904)11987721199091015840(119904)119889119904 is offsetin Case 1 Then in the same methods of transformation asCase 1 the inequality (24) when 119897 = 2 can be obtainedTherefore the proof is complete
Remark 9 In the two different cases a variational weightingmatrix and Jessenrsquos inequalities are used to derive the 119867infinguaranteed cost fault-tolerant condition of the system inwhich more delay information is employed to reduce theconservatism
The next section will provide sufficient conditions fordesigning the guaranteed cost fault-tolerant control for adouble-fault NCS
4 Guaranteed Cost Fault-Tolerant Control ofDouble-Fault NCS
Inequality (24) is not linear with respect to the gain matricesof the controller so it is needs to be reformulated into LMIsvia a change of variables
Theorem 10 Given symmetric positive definite matrices 1198781and 1198782 a set of constant 120578119898 120578119872 1205881 gt 0 1205882 gt 0 120582119894 (119894 = from1 to 7) and 120572 = (120578119872 minus 120578119898)2 If there exists a set of symmetricpositive definite matrices 119895 (119895 = 1 2 3)119883 andmatrix gt 0as well as matrices 1120573 2120573 1120573 2120573 (120573 =from 1 to 8)
12 Mathematical Problems in Engineering
119884 and a set of constants 120576 gt 0 and 120583 gt 0 satisfying theLMIs
[[[[[[[[[[[[[[[[[[[[[[[[[[
minus120576119868 0 0 0 120576119863119879lowast minus (1198781 + 119862119879119862)minus1 0 0 Πlowast lowast minus1198782minus1 0 Σlowast lowast lowast minusΓ119897 Ω119897119896lowast lowast lowast lowast Φ119897lowast lowast lowast lowast lowastlowast lowast lowast lowast lowastlowast lowast lowast lowast lowastlowast lowast lowast lowast lowastlowast lowast lowast lowast lowast
0 0 0 0 00 0 0 0 00 Θ0119884 0 Θ0 00 0 0 0 0
119864119879 Θ 119883 Δ 119884119879minus120576119868 1198642Θ0119884 0 1198642Θ0 0lowast minus1205881119883119879 0 0 119884119879lowast lowast minus1205881minus1119883 0 0lowast lowast lowast minus1205882119868 0lowast lowast lowast lowast minus1205882minus1119868
]]]]]]]]]]]]]]]]]]]]]]
lt 0
119897 = 1 2 119896 = 1 2(62)
where
Φ1 =
[[[[[[[[[[[[[[[[[[[[[
minus1 + 1205821119860119883119879 + 1205821119883119860119879 1 + 1205822119883119860119879 + 11 1205823119883119860119879 minus 11 1205824119883119860119879lowast minus1 + 12 + 12119879 13119879 minus 12 14119879lowast lowast minus3120572 minus 12 minus 12119879 3120572 minus 14119879lowast lowast lowast minus3120572lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
minus 1205821119883119879 + 119883119860119879 Ψ1 + 1205825119883119860119879 1205826119883119860119879 + 1205827119883119860119879 + 1205821119867119883119879 0minus1205822119883119879 + 15119879 Ψ2 + 16119879 1205822119867119883119879 + 17119879 + 18119879 0minus1205823119883119879 minus 15119879 Ψ3 minus 16119879 1205823119867119883119879 minus 17119879 minus 18119879 0
minus1205824119883119879 Ψ4 1205824119867119883119879 012057811989821 + 120572 (2 + 3) minus 119883119879 minus 119883 Ψ5 minus 1205825119883 119867119883119879 minus 1205826119883 minus 1205827119883 0
lowast Ψ6 Ξ 0lowast lowast 1205826119867119883119879 + 1205827119867119883119879 + 1205826119883119867119879 + 1205827119883119867119879 0lowast lowast lowast minus120583119868
]]]]]]]]]]]]]]]]]
Φ2 =
[[[[[[[[[[[[[[[[[[[[[
minus1 + 1205821119860119883119879 + 1205821119883119860119879 1 + 1205822119883119860119879 1205823119883119860119879 + 21 1205824119883119860119879 minus 21lowast minus1 minus 2120572 2120572 + 22 minus22lowast lowast minus2120572 + 23 + 23119879 24119879 minus 23lowast lowast lowast minus24 minus 24119879lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
Mathematical Problems in Engineering 13
minus 1205821119883119879 + 119883119860119879 Ψ11015840 + 1205825119883119860119879 1205826119883119860119879 + 1205827119883119860119879 + 1205821119867119883119879 0minus1205822119883119879 Ψ21015840 1205822119867119883119879 0
minus1205823119883119879 + 25119879 Ψ31015840 + 26119879 1205823119867119883119879 + 27119879 + 28119879 0minus1205824119883119879 minus 25119879 Ψ41015840 minus 26119879 1205824119867119883119879 minus 27119879 minus 28119879 0
12057811989821 + 120572 (2 + 3) minus 119883 minus 119883119879 Ψ51015840 minus 1205825119883 119867119883119879 minus 1205826119883 minus 1205827119883 0lowast Ψ61015840 Ξ1015840 0lowast lowast 1205826119867119883119879 + 1205827119867119883119879 + 1205826119883119867119879 + 1205827119883119867119879 0lowast lowast lowast minus120583119868
]]]]]]]]]]]]]]]]]]]]]
Γ1 = 1205721198772Γ1 = 1205722Γ2 = 1205723
Ω11 = 1205721119879Ω12 = 1205721119879Ω21 = 1205722119879Ω22 = 1205722119879
1119879 = [11119879 12119879 13119879 14119879 15119879 16119879 17119879 18119879] 2119879 = [21119879 22119879 23119879 24119879 25119879 26119879 27119879 28119879]
1119879 = [11119879 12119879 13119879 14119879 15119879 16119879 17119879 18119879] 1198732119879 = [21119879 22119879 23119879 24119879 25119879 26119879 27119879 28119879]
Ξ = 1205826 (119861Θ0119884)119879 + 1205827 (119861Θ0119884)119879 + 1205825119867119883119879 minus 17119879 minus 18119879 + 17119879 + 18119879Ψ119894 = 120582119894119861Θ0119884 + 1119894 minus 1119894 (119894 = 1 2 3 4)
Ψ5 = 119861Θ0119884 + 1119894 minus 1119894Ψ6 = 1205825119861Θ0119884 + 1205825 (119861Θ0119884)119879 minus 11987216 minus 11987216119879 + 11987316 + 11987316119879
Ξ1015840 = 1205826 (119861Θ0119884)119879 + 1205827 (119861Θ0119884)119879 + 1205825119867119883119879 minus 27119879 minus 28119879 + 27119879 + 28119879Ψ1198941015840 = 120582119894119861Θ0119884 + 2119894 minus 2119894 (119894 = 1 2 3 4)
Ψ51015840 = 119861Θ0119884 + 2119894 minus 2119894Ψ61015840 = 1205825119861Θ0119884 + 1205825 (119861Θ0119884)119879 minus 26 minus 26119879 + 26 + 26119879
119863 = [1205821119863119879 1205822119863119879 1205823119863119879 1205824119863119879 119863119879 1205825119863119879 1205826119863119879 + 1205827119863119879 0]119879 119864 = [1198641119883119879 0 0 0 0 1198642Θ0119884 0 0]
119883 = [0 0 0 0 0 119883119879 0 0]119879 Π = [119883119879 0 0 0 0 0 0 0]
14 Mathematical Problems in Engineering
Θ = [(1205821119861Θ0119884)119879 (1205822119861Θ0119884)119879 (1205823119861Θ0119884)119879 (1205824119861Θ0119884)119879 (119861Θ0119884)119879 (1205825119861Θ0119884)119879 (1205826119861119884)119879 + (1205827119861119884)119879 0]119879 Δ = [(1205821119861Θ0)119879 (1205822119861Θ0)119879 (1205823119861Θ0)119879 (1205824119861Θ0)119879 (119861Θ0)119879 (1205825119861Θ0)119879 (1205826119861Θ0)119879 + (1205827119861Θ0)119879 0]119879
119884 = [0 0 0 0 0 119884 0 0] Σ = [0 0 0 0 0 Θ0119884 0 0]
(63)
then the 119867infin guaranteed cost control gain 119870 = 119884119883minus1198791198660minus1 canrendermodel (21) to be asymptotically stable with the119867infin normbound 120574 = radic120583 13e upper bound 1198690 of cost function 119869 is givenas
1198690 = 119909119879 (0) 119883minus1119883minus119879119909 (0)+ 120578119898 int0
minus120578119898
int0119904
1199091015840119879 (120591) 119883minus11119883minus1198791199091015840 (120591) 119889119904119889120591+ intminus120578119898minus1205781
int0119904
1199091015840119879 (120591) 119883minus12119883minus1198791199091015840 (120591) 119889119904119889120591+ intminus1205781minus120578119872
int0119904
1199091015840119879 (120591) 119883minus13119883minus1198791199091015840 (120591) 119889119904119889120591
(64)
Proof The proof is based on a suitable transformation anda change of variables allowing us to obtain inequality (24)in Theorem 8 First we define 1198805 = 1198800 119880119894 = 1205821198941198800 (119894 =from 1 to 4) 1198806 = 12058251198800 in (24) Because we consider thedimension of state119909is equal to that of outside disturbance120596 in this paper we can also define 1198807 = 12058261198800 1198808 =12058271198800 Obviously (24) implies 1198805 gt 0 so 1198800 is nonsingularThen using the analysis method of D Yue [40] and Z Wang[41] pre- and postmultiplying both sides of inequality (24)with diag(119868 119868 119868 119883 119868 119883 119868 119868 119868) and its transpose where = diag(119883 119883 119883 119883 119883 119883 119883 119883) and 119883 = 1198800minus1 introducingnew variables 119883119875119883119879 = 119883119877119895119883119879 = 119895 (119895 = 1 2 3)119883119872119897120573119883119879 = 119897120573 119883119873119897120573119883119879 = 119897120573 (119897 = 1 2 120573 = 1 2 sdot sdot sdot 8)1198701198660119883119879 = 119884 and 120583 = 1205742 From the definition of 1198660 we know1198660 is invertible so 119870 can be obtained by calculating 119870 =119884119883minus1198791198660minus1 It is easy to see that 10 and (64) respectively imply(24) and (26) Therefore from Theorem 8 we can completethe proof
To obtain the optimal bound 119869lowast shown in (26) thecommonly used method is to consider it as an optimizationproblem like [42] in which the expression of initial state 119909(119905)(119905 isin [minus120578119872 0]) needs to be known The expression of initialstate is not given in this paper Therefore the optimizationmethod used in [42] cannot be used here A practical methodto obtain 119869lowast also used by D Yue [43] is employed as follows
Suppose 1199091015840(119905) is bounded if 119905 isin [minus120578119872 0] and satisfying1199091015840119879(120591)1199091015840(120591) le ℓ In addition suppose that there exists 120573119894 gt0 (119894 = 1 2 3) satisfying119883minus1119894119883minus119879 le 120573119894119868 119894 = 1 2 3119883minus1119883minus119879 le 1205734119868 (65)
Inserting this into (64) we have
1198690 le 1205734119909119879 (0) 119909 (0) + 05ℓ12057311205781198983 + 05ℓ1205732 (12057812 minus 1205781198982)+ 05ℓ1205733 (1205781198722 minus 12057812) = 119869lowast (66)
Applying the Schur complement to the inequalities above wehave
[minus120573119894119868 119883minus1lowast minus119877119894minus1] lt 0 119894 = 1 2 3
[minus1205734119868 119883minus1lowast minus119875minus1] lt 0
(67)
Then combining 10 and (67) 119894minus1 119894 (119894 = 1 2 3)minus1 119883minus1 119883 exist simultaneously We cannot directly usethe LMI tools to solve the problem Defining 119894minus1 = 119894(119894 = 1 2 3) minus1 = 119883minus1 = and using the idea of thecone complementary linearization algorithm the guaranteedcost fault-tolerant controller of system (21) and the value ofoptimal performance indicator 119869lowast can be obtained in thefollowing method
Minimize 119905119903119886119888119890 (11 + 22 + 33 + + )+ 1205734 + 0512057311205781198983 + 051205732 (12057812 minus 1205781198982)+ 051205733 (1205781198722 minus 12057812)
Subject to 119868119899119890119902119906119886119897119894119905119894119890119904 (62) [minus120573119894119868
lowast minus119894] lt 0 (119894 = 1 2 3)
[minus1205734119868 lowast minus] lt 0
[119883 119868lowast ] ge 0
[1 119868lowast 1] ge 0
[2 119868lowast 2] ge 0
Mathematical Problems in Engineering 15
[3 119868lowast 3] ge 0
[ 119868lowast ] ge 0
119894 gt 0 (119894 = 1 2 3) (68)
5 Simulations
Example 11 Consider inverted pendulum model that canusually be modelled as (1) and the system parameters aregiven as follows
119860 = [minus2 1110 4 ]
119861 = [01minus4]
119862 = [minus03151 01011 03]
119867 = [015 minus056minus01 032 ]
Δ119860 = [004 sin 119905 015 sin 119905minus02 sin 119905 075 sin 119905]
Δ119861 = [002 sin 119905minus01 sin 119905]
119863 = [ 01minus05]
119865 (119905) = sin 119905
(69)
Therefore we have
1198641 = [04 15] 1198642 = 02 (70)
For this simulation the initial state of system is assumed119909(0) = [2 minus1]119879 and the external disturbance is considered as120596(119905) = [015 minus05]119879 3119904 le 119905 le 4119904
0 119900119905ℎ119890119903119904 Here we take the upper
bound of time-varying delay as 120578119872 = 03119904 and its lower boundas 120578119898 = 0119904 namely 0 le 120578(119905) le 03 In addition the faultbounds of the system are given in Table 1
Table 1 The bounds of faults
Symbol Upper bound Lower boundActuatorfaultsΘ 136 009
SensorFaults119866
[[
165 00 175]
][[
0 00 015]
]
minus01
0
01
02
03
04
05
Del
ay
1 2 3 4 5 60Time s
Figure 2 The time-varying delay in double-fault NCS
We choose the parameters as follows
1205821 = 011205822 = 0151205823 = minus0641205824 = 031205825 = 1205826 = 0351205827 = 181198782 = 0311205881 = 30001205882 = 22032ℓ = 1
1198781 = [10013 00 9207]
(71)
By taking advantage of the LMI tool box and inserting theabove parameters into inequalities 10 and (68) we can obtainthe 119867infin guaranteed cost control gain
119870 = 119884119883minus1198791198660minus1 = [85163 151398] (72)
with 120574 = radic120583 = 1952516The corresponding optimal performance indicator (the
upper bound value of guaranteed cost function) is 119869lowast =83162563The time-varying delay is shown in Figure 2 In Figure 3
(a) is the actuator fault which is a piecewise-linear function
16 Mathematical Problems in Engineering
002040608
1121416
Actu
ator
faul
t
1 2 3 4 5 60Time s
(a) Time-varying actuator fault
minus020
02040608
112141618
Sens
or fa
ult
1 2 3 4 5 60Time s
(b) Time-varying sensor fault
Figure 3 The time-varying faults
x1
x2
1 2 3 4 5 60Time s
minus15
minus1
minus05
0
05
1
15
2
Stat
e X
Figure 4 The state response curve of double-fault NCS
1 2 3 4 5 60Time s
minus8minus7minus6minus5minus4minus3minus2minus1
012
Con
trol i
nput
Figure 5 The control input of double-fault NCS
It keeps the minimum value from 13119904 to 17119904 while it keepsthe maximum value from 37119904 to 43119904 The sensor faults areshown as (b) which is sinusoidal It should be noted thatthe green dotted line represents the fault of sensor 1 whilethe blue solid line represents the fault of sensor 2 Throughthe state response of the double-fault NCS shown in Figure 4and corresponding control signal shown in Figure 5 we know
x1
x2
1 2 3 4 5 60Time s
minus8
minus6
minus4
minus2
0
2
4
6
Stat
e X
Figure 6 The state response curve of double-fault NCS
the 119867infin guaranteed cost controller designed in this paper isable to make the double-fault NCS asymptotically stable Thesystem gets preliminarily steady at 2119904 and its state can returnto the equilibrium position in a certain period of time whenthe NCS is affected by external disturbance Compared withthe state response of worse stability shown in Figure 6 whenthe method proposed in [28] is used for this double-faultproblem it sufficiently proves the effectiveness and feasibilityof the method proposed in this paper
To better illustrate the effectiveness of the method pro-posed in this paper the following example is presented
Example 12 Consider the parameters of system (1) as follows
119860 = [[[[[[
021 0 035 10 minus53 minus586 323
365 minus11 minus156 minus0890 0 minus158 minus285
]]]]]]
119861 = [559 12 minus089 13]119879 119862 = [17 02 015 minus018]
Mathematical Problems in Engineering 17
minus15
minus1
minus05
0
05
1
15
Stat
e X1 2 3 4 5 6 7 8 9 100
Time s
R1R2
R3R4
Figure 7 The state response curve of double-fault NCS
Δ119860 = [[[[
082 sin 119905 0 0 00 012 sin 119905 0 00 0 minus058 sin 119905 00 0 0 101 sin 119905]]]]
Δ119861 = [[[[
minus015 sin 119905008 sin 1199050minus028 sin 119905]]]]
119867 = [[[[
minus041 096 052 0006 minus057 0 021121 0 059 0minus032 minus011 minus035 minus003]]]]
119863 = 1198684times4119865 (119905) = diag (sin 119905 sin 119905 sin 119905 sin 119905)
(73)
Therefore we have
1198641 = diag (082 012 minus058 101) 1198642 = [minus015 008 0 minus028]119879 (74)
For this simulation the initial state of system is assumedas 119909(0) = [121 minus051 023 minus018]119879 and the externaldisturbance is considered as
120596 (119905) = [015 cos 119905 015 cos 119905 minus012 sin 119905 minus025 cos 119905]119879 6119904 le 119905 le 81199040 119900119905ℎ119890119903119904 (75)
The uncertain time-varying delay satisfies 0 le 120578(119905) le023119904 In addition the fault bounds of the system are givenin Table 2 Other parameters are selected as follows
1205821 = 121205822 = minus2031205823 = 1681205824 = minus231205825 = minus1051205826 = 6051205827 = 5121198781 = diag (19888 15634 8709 12876) 1198782 = 586
1205881 = 57981205882 = 1879ℓ = 1
(76)
By taking advantage of the LMI tool box and submittingthese parameters above into inequalities 10 and (68) we canobtain the 119867infin guaranteed cost control gain
119870 = 119884119883minus1198791198660minus1= [minus17256 15512 minus08571 07451]
with 120574 = radic120583 = 5819806(77)
The corresponding optimal performance indicator is 119869lowast =65021047 From the state response shown in Figure 7 andcontrol signal shown in Figure 8 we undoubtedly know
18 Mathematical Problems in Engineering
Table 2 The bounds of faults
Symbol Upper bound Lower boundActuatorfaultsΘ 150 012
SensorFaults119866
[[[[[[[[
185 0 0 00 160 0 00 0 125 00 0 0 165
]]]]]]]]
[[[[[[[[
025 0 0 00 0 0 00 0 0 00 0 0 015
]]]]]]]]
minus4
minus3
minus2
minus1
0
1
2
Con
trol i
nput
1 2 3 4 5 6 7 8 9 100Time s
Figure 8 The control input of double-fault NCS
the double-fault NCS is asymptotically stable when the 119867infinguaranteed cost controller is used This further demonstratesthe feasibility and effectiveness of the method proposed inthis paper
6 Conclusions
The issues of modelling and 119867infin guaranteed cost fault-tolerant control of double-fault networked control systemshave been addressedThe closed-loopmodel of a double-faultNCS is set up with regard to the influences of transmissiondelay packet dropout uncertain parameters and externaldisturbance In addition the piecewise delay method is pro-posed to reduce the conservatism when analysing the delay-dependent faulty system With the help of Lee Y Srsquos lemmathe sufficient condition of guaranteed cost fault-tolerantfor time-varying double-fault NCS is introduced using theLyapunov-Krasovskii theory and weighted technology Themethod of designing a guaranteed cost fault-tolerant con-troller for this NCS is given based on LMI Our next researchtask will be choosing more reasonable values of parameters120582119894 (119894 = 1 2 3 4 5 6 7) to reduce the conservatism further Ofcourse the study on scheduling policy of double-fault NCS isalso a challenge but indispensable work
Data Availability
The data used in this paper can be got by simulations
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was partly supported by National Nature Sci-ence Foundation of China under Grants 51875380 51375323and 61563022 Cooperative Innovation Fund-Prospective ofJiangsu Province under Grant BY2016044-01Major Programof Natural Science Foundation of Jiangxi Province Chinaunder Grant 20152ACB20009 High Level Talents of ldquoSix Tal-ent Peaksrdquo in Jiangsu Province China under Grant DZXX-046
References
[1] H Zhang Y Shi J Wang and H Chen ldquoA New Delay-compensation Scheme for Networked Control Systems inController Area Networksrdquo IEEE Transactions on IndustrialElectronics vol 65 no 9 pp 7239ndash7247 2018
[2] A Da Silva and C Kawan ldquoRobustness of critical bit rates forpractical stabilization of networked control systemsrdquo Automat-ica vol 93 pp 397ndash406 2018
[3] Q Zhu K Lu and Y Zhu ldquoGuaranteed cost control ofnetworked control systems under transmission control protocolwith active queue managementrdquo Asian Journal of Control vol18 no 4 pp 1546ndash1557 2016
[4] Q Zhu K Lu and Y Zhu ldquoHinfin Guaranteed Cost Control forNetworked Control Systems under Scheduling Policy Based onPredicted Errorrdquo Mathematical Problems in Engineering vol2014 Article ID 586029 12 pages 2014
[5] W H Chen J X Xu and Z H Guan ldquoGuaranteed cost controlfor uncertain Markovian jump systems with mode-dependenttime-delaysrdquo IEEE Transactions on Automatic Control vol 48no 12 pp 2270ndash2277 2003
[6] HM Soliman A DabroumM S Mahmoud andM SolimanldquoGuaranteed-cost reliable control with regional pole placementof a power systemrdquo Journal of 13e Franklin Institute vol 348no 5 pp 884ndash898 2011
[7] X Li and X-B Wu ldquoGuaranteed cost fault-tolerant controllerdesign of networked control systems under variable-periodsamplingrdquo Information Technology Journal vol 8 no 4 pp 537ndash543 2009
[8] L Zhang and G Orosz ldquoMotif-Based Design for ConnectedVehicle Systems in Presence of Heterogeneous ConnectivityStructures and Time Delaysrdquo IEEE Transactions on IntelligentTransportation Systems vol 17 no 6 pp 1638ndash1651 2016
[9] Z Li G Guo and Z Liu ldquoCommunication parameter designfor networked control systems with the slotted ALOHA accessprotocolrdquo Information Sciences vol 447 pp 205ndash215 2018
[10] K Lu G Jing and L Wang ldquoDistributed algorithm for solv-ing convex inequalitiesrdquo Institute of Electrical and ElectronicsEngineers Transactions on Automatic Control vol 63 no 8 pp2670ndash2677 2018
[11] Q Zhu K Lu and Y Zhu ldquoObserver-based feedback controlof networked control systems with delays and packet dropoutsrdquoJournal of Dynamic SystemsMeasurement andControl vol 138no 2 pp 1ndash8 2016
Mathematical Problems in Engineering 19
[12] Y Li H Li and W Sun ldquoEvent-triggered control for robust setstabilization of logical control networksrdquo Automatica vol 95pp 556ndash560 2018
[13] X Luan P Shi and F Liu ldquoStabilization of networked controlsystems with random delaysrdquo IEEE Transactions on IndustrialElectronics vol 58 no 9 pp 4323ndash4330 2011
[14] Y Zhang and J Jiang ldquoBibliographical review on reconfigurablefault-tolerant control systemsrdquo Annual Reviews in Control vol32 no 2 pp 229ndash252 2008
[15] N H Ei-Farra A Gani and P D Christofides ldquoFault-tolerantcontrol of process systems using communication networksrdquoAIChE Journal vol 51 no 6 pp 1665ndash1682 2005
[16] H R Karimi and H Gao ldquoNew delay-dependent exponentialHinfin synchronization for uncertain neural networks withmixedtime delaysrdquo IEEE Transactions on Systems Man and Cybernet-ics Part B Cybernetics vol 40 no 1 pp 173ndash185 2010
[17] Y N Guo Q Y Zhang D W Gong and J H Zhang ldquoRobustfault-tolerant control of networked control systems with time-varying delaysrdquoControl andDecision vol 23 no 6 pp 689ndash6922008
[18] Z Mao and B Jiang ldquoFault identification and fault-tolerantcontrol for a class of networked control systemsrdquo InternationalJournal of Innovative Computing Information and Control vol3 no 5 pp 1121ndash1130 2007
[19] C-X Yang Z-H Guan and J Huang ldquoStochastic fault tolerantcontrol of networked control systemsrdquo Journal of 13e FranklinInstitute vol 346 no 10 pp 1006ndash1020 2009
[20] Z Mao Y Pan B Jiang and W Chen ldquoFault Detectionfor a Class of Nonlinear Networked Control Systems withCommunication Constraintsrdquo International Journal of ControlAutomation and Systems vol 16 no 1 pp 256ndash264 2018
[21] A Qiu J Gu C Wen and J Zhang ldquoSelf-triggered faultestimation and fault tolerant control for networked controlsystemsrdquo Neurocomputing vol 272 no 1 pp 629ndash637 2018
[22] Q Zhu K Lu G Xie and Y Zhu ldquoGuaranteed Cost Fault-Tolerant Control for Networked Control Systems with SensorFaultsrdquoMathematical Problems in Engineering vol 2015 ArticleID 549347 9 pages 2015
[23] W Wu and Y Zhang ldquoEvent-triggered fault-tolerant controland scheduling codesign for nonlinear networked control sys-tems with medium-access constraint and packet disorderingrdquoInternational Journal of Robust and Nonlinear Control vol 28no 4 pp 1182ndash1198 2018
[24] X Xiao and X-J Li ldquoAdaptive dynamic programming method-based synchronisation control of a class of complex dynamicalnetworks with unknown dynamics and actuator faultsrdquo IETControl 13eory amp Applications vol 12 no 2 pp 291ndash298 2018
[25] PMhaskar AGani CMcFall PDChristofides and J FDavisldquoFault-tolerant control of nonlinear process systems subject tosensor faultsrdquo AIChE Journal vol 53 no 3 pp 654ndash668 2007
[26] M Liu P Shi L Zhang and X Zhao ldquoFault-tolerant controlfor nonlinear Markovian jump systems via proportional andderivative sliding mode observer techniquerdquo IEEE Transactionson Circuits and Systems I Regular Papers vol 58 no 11 pp2755ndash2764 2011
[27] S Li D Sauter C Aubrun and J Yame ldquoStability guaranteedactive fault-tolerant control of networked control systemsrdquoJournal of Control Science and Engineering vol 2008 Article ID189064 9 pages 2008
[28] X Y Luo M J Shang C L Chen and X P Guan ldquoGuaranteedcost active fault-tolerant control of networked control system
with packet dropout and transmission delayrdquo InternationalJournal of Automation and Computing vol 7 no 4 pp 509ndash5152010
[29] Q Zhu B Xie and Y Zhu ldquoGuaranteed Cost Control forMultirate Networked Control Systems with Both Time-Delayand Packet-Dropoutrdquo Mathematical Problems in Engineeringvol 2014 Article ID 637329 9 pages 2014
[30] R Manivannan R Samidurai J Cao and M Perc ldquoDesign ofResilient Reliable Dissipativity Control for Systems with Actu-ator Faults and Probabilistic Time-Delay Signals via Sampled-Data Approachrdquo IEEE Transactions on Systems Man andCybernetics Systems 2018
[31] R Manivannan R Samidurai J Cao A Alsaedi and F EAlsaadi ldquoNon-Fragile Extended Dissipativity Control Designfor Generalized Neural Networks with Interval Time-DelaySignalsrdquo Asian Journal of Control 2019
[32] Q Gao and N Olgac ldquoBounds of imaginary spectra of LTIsystems in the domain of two of the multiple time delaysrdquoAutomatica vol 72 pp 235ndash241 2016
[33] Q Gao A S Kammer U Zalluhoglu and N Olgac ldquoCriticaleffects of the polarity change in delayed states within anLTI dynamics with multiple delaysrdquo Institute of Electrical andElectronics Engineers Transactions onAutomatic Control vol 60no 11 pp 3018ndash3022 2015
[34] Q Gao Z Zhang and C Yang ldquoSign inverting control andits important properties for multiple time-delayed systemsrdquo inProceedings of the 10th ASME Dynamic Systems and ControlConference pp 979ndash984 Virginia USA 2017
[35] Y M Zhang and J Jiang ldquoActive fault-tolerant control systemagainst partial actuator failuresrdquo IEE Proceedings Control13eoryand Applications vol 149 no 1 pp 95ndash104 2002
[36] G Garcia J Bernussou andD Arzelier ldquoRobust stabilization ofdiscrete-time linear systems with norm-bounded time-varyinguncertaintyrdquo Systems amp Control Letters vol 22 no 5 pp 327ndash339 1994
[37] Y Wang L Xie and C E de Souza ldquoRobust control of a classof uncertain nonlinear systemsrdquo Systems amp Control Letters vol19 no 2 pp 139ndash149 1992
[38] D Yue E Tian and Y Zhang ldquoA piecewise analysis methodto stability analysis of linear continuousdiscrete systems withtime-varying delayrdquo International Journal of Robust and Non-linear Control vol 19 no 13 pp 1493ndash1518 2009
[39] X-J Jing D-L Tan and Y-C Wang ldquoAn LMI approach tostability of systems with severe time-delayrdquo IEEE Transactionson Automatic Control vol 49 no 7 pp 1192ndash1195 2004
[40] D Yue Q-L Han and J Lam ldquoNetwork-based robust Hinfincontrol of systems with uncertaintyrdquo Automatica vol 41 no 6pp 999ndash1007 2005
[41] Z Wang F Yang D W C Ho and X Liu ldquoRobust Hinfincontrol for networked systemswith randompacket lossesrdquo IEEETransactions on Systems Man and Cybernetics Part B vol 37no 4 pp 916ndash924 2007
[42] M S Mahmoud ldquoControl of uncertain state-delay systemsguaranteed cost approachrdquo IMA Journal of Mathematical Con-trol and Information vol 18 no 1 pp 109ndash128 2001
[43] D Yue C Peng andG Y Tang ldquoGuaranteed cost control of lin-ear systems over networks with state and input quantisationsrdquoIEE Proceedings Control 13eory and Applications vol 153 no 6pp 658ndash664 2006
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Mathematical Problems in Engineering 5
Φ1 =
[[[[[[[[[[[[[[[[[[[
minus1198771 + 1198801119860 + (1198801119860)119879 1198771 + (1198802119860)119879 + 11987211 (1198803119860)119879 minus 11987311 (1198804119860)119879lowast minus1198771 + 11987212 + 11987212119879 11987213119879 minus 11987312 11987214119879lowast lowast minus1198773120572 minus 11987312 minus 11987312119879 1198773120572 minus 11987314119879lowast lowast lowast minus1198773120572lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
119875 minus 1198801 + (1198805119860)119879 Ψ1 + (1198806119860)119879 (1198807119860)119879 + (1198808119860)119879 + 1198801119867 0minus1198802 + 11987215119879 Ψ2 + 11987216119879 1198802119867 + 11987217119879 + 11987218119879 0minus1198803 minus 11987315119879 Ψ3 minus 11987316119879 1198803119867 minus 11987317119879 minus 11987318119879 0
minus1198804 Ψ4 1198804119867 012057811989821198771 + 120572 (1198772 + 1198773) minus 1198805 minus 1198805119879 Ψ5 minus 1198806119879 1198805119867 minus 1198807119879 minus 1198808119879 0
lowast Ψ6 Ξ 0lowast lowast 1198807119867 + 1198808119867 + (1198807119867)119879 + (1198808119867)119879 0lowast lowast lowast minus1205742119868
]]]]]]]]]]]]]]]]]]]
Φ2 =
[[[[[[[[[[[[[[[[[[[[
minus1198771 + 1198801119860 + (1198801119860)119879 1198771 + (1198802119860)119879 (1198803119860)119879 + 11987221 (1198804119860)119879 minus 11987321lowast minus1198771 minus 1198772120572 1198772120572 + 11987222 minus11987322lowast lowast minus1198772120572 + 11987223 + 11987223119879 11987224119879 minus 11987323lowast lowast lowast minus11987324 minus 11987324119879lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
119875 minus 1198801 + (1198805119860)119879 Ψ11015840 + (1198806119860)119879 (1198807119860)119879 + (1198808119860)119879 + 1198801119867 0minus1198802 Ψ21015840 1198802119867 0
minus1198803 + 11987225119879 Ψ31015840 + 11987226119879 1198803119867 + 11987227119879 + 11987228119879 0minus1198804 minus 11987325119879 Ψ41015840 minus 11987326119879 1198804119867 minus 11987327119879 minus 11987328119879 0
12057811989821198771 + 120572 (1198772 + 1198773) minus 1198805 minus 1198805119879 Ψ51015840 minus 1198806119879 1198805119867 minus 1198807119879 minus 1198808119879 0lowast Ψ61015840 Ξ1015840 0lowast lowast 1198807119867 + 1198808119867 + (1198807119867)119879 + (1198808119867)119879 0lowast lowast lowast minus1205742119868
]]]]]]]]]]]]]]]]]]]]]
Γ1 = 1205721198772Γ2 = 1205721198773
Ω11 = 1205721198721119879
6 Mathematical Problems in Engineering
Ω12 = 1205721198731119879Ω21 = 1205721198722119879Ω22 = 1205721198732119879
1198721119879 = [11987211119879 11987212119879 11987213119879 11987214119879 11987215119879 11987216119879 11987217119879 11987218119879] 1198722119879 = [11987221119879 11987222119879 11987223119879 11987224119879 11987225119879 11987226119879 11987227119879 11987228119879]
1198731119879 = [11987311119879 11987312119879 11987313119879 11987314119879 11987315119879 11987316119879 11987317119879 11987318119879] 1198732119879 = [11987321119879 11987322119879 11987323119879 11987324119879 11987325119879 11987326119879 11987327119879 11987328119879]
Ξ = (1198807119861Θ01198701198660)119879 + (1198808119861Θ01198701198660)119879 + 1198806119867 minus 11987217119879 minus 11987218119879 + 11987317119879 + 11987318119879Ψ119894 = 119880119894119861Θ01198701198660 + 1198731119894 minus 1198721119894 (119894 = 1 2 3 4 5)
Ψ6 = 1198806119861Θ01198701198660 + (1198806119861Θ01198701198660)119879 minus 11987216 minus 11987216119879 + 11987316 + 11987316119879Ξ1015840 = (1198807119861Θ01198701198660)119879 + (1198808119861Θ01198701198660)119879 + 1198806119867 minus 11987227119879 minus 11987228119879 + 11987327119879 + 11987328119879
Ψ1198941015840 = 119880119894119861Θ01198701198660 + 1198732119894 minus 1198722119894 (119894 = 1 2 3 4 5) Ψ10158406 = 1198806119861Θ01198701198660 + (1198806119861Θ01198701198660) 119879 minus 11987226 minus 11987226119879 + 11987326 + 11987326119879
= [(1198801119863)119879 (1198802119863)119879 (1198803119863)119879 (1198804119863)119879 (1198805119863)119879 (1198806119863)119879 (1198807119863)119879 + (1198808119863)119879 0]119879 = [1198641 0 0 0 0 1198642Θ01198701198660 0 0]
0 = [0 0 0 0 0 119868 0 0]119879 = [119868 0 0 0 0 0 0 0]
Θ = [(1198801119861Θ01198701198660)119879 (1198802119861Θ01198701198660)119879 (1198803119861Θ01198701198660)119879 (1198804119861Θ01198701198660)119879 (1198805119861Θ01198701198660)119879 (1198806119861Θ01198701198660)119879 (11988071198611198701198660)119879 + (11988081198611198701198660)119879 0]119879 Δ = [(1198801119861Θ0)119879 (1198802119861Θ0)119879 (1198803119861Θ0)119879 (1198804119861Θ0)119879 (1198805119861Θ0)119879 (1198806119861Θ0)119879 (1198807119861Θ0)119879 + (1198808119861Θ0)119879 0]119879
= [0 0 0 0 0 1198701198660 0 0] Σ = [0 0 0 0 0 Θ01198701198660 0 0]
(25)
then model (21) is asymptotically stable with the 119867infin normbound 120574 In addition the upper bound 1198690 of cost function 119869 isgiven as
1198690 = 119909119879 (0119905) 119875119909 (0) + 120578119898 int0minus120578119898
int0119904
1199091015840119879 (120591) 11987711199091015840 (120591) 119889119904119889120591+ intminus120578119898minus1205781
int0119904
1199091015840119879 (120591) 11987721199091015840 (120591) 119889119904119889120591+ intminus1205781minus120578119872
int0119904
1199091015840119879 (120591) 11987731199091015840 (120591) 119889119904119889120591
(26)
Proof First with the definition of 120572 = (120578119872 minus 120578119898)2 and 1205781 =120578119898+120572 the interval of delay is distributed into two subintervalsas follows
120578 (119905) isin [120578119898 120578119872] = [120578119898 1205781] cup [1205781 120578119872] (27)
Then we consider the Lyapunov-Krasovskii functional asfollows
V (119905) = 119909119879 (119905) 119875119909 (119905)+ 120578119898 int119905
119905minus120578119898
int119905119904
1199091015840119879 (120591) 11987711199091015840 (120591) 119889119904119889120591+ int119905minus120578119898119905minus1205781
int119905119904
1199091015840119879 (120591) 11987721199091015840 (120591) 119889119904119889120591+ int119905minus1205781119905minus120578119872
int119905119904
1199091015840119879 (120591) 11987731199091015840 (120591) 119889119904119889120591
(28)
where matrix 119875 satisfies 119875 gt 0 and 119877119894 (119894 = 1 2 3)are symmetric positive definite matrices with appropriatedimensions For the convenience of writing we denote 119871 =119871(119905 minus 120578(119905)) and Γ = Γ(119905) in the following expressions
Mathematical Problems in Engineering 7
Calculating the derivative of Lyapunov-Krasovskii functionand based on (21) we have
V1015840 (119905) = 2119909119879 (119905) 1198751199091015840 (119905) + 12057821198981199091015840119879 (119905) 11987711199091015840 (119905)minus 120578119898 int119905
119905minus120578119898
1199091015840119879 (119904) 11987711199091015840 (119904) 119889119904 + (1205781 minus 120578119898) 1199091015840119879 (119905)sdot 11987721199091015840 (119905) minus int119905minus120578119898
119905minus1205781
1199091015840119879 (119904) 11987721199091015840 (119904) 119889119904 + (120578119872 minus 1205781)sdot 1199091015840119879 (119905) 11987731199091015840 (119905) minus int119905minus1205781
119905minus120578119872
1199091015840119879 (119904) 11987731199091015840 (119904) 119889119904+ 2 [120576119879 (119905) 120596119879 (119905)] 119880 [(119860 + Δ119860) 119909 (119905)+ (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) 119909 (119905 minus 120578 (119905))+ 119867120596 (119905) minus 1199091015840 (119905)]
(29)
where V1015840(119905) = lim sup120575997888rarr0+(1120575)[V(119905 + 120575) minus V(119905)] [39]Based on Jessenrsquos inequality we have
minus 120578119898 int119905119905minus120578119898
1199091015840119879 (119904) 11987711199091015840 (119904) 119889119904 le [119909119879 (119905) 119909119879 (119905 minus 120578119898)]sdot [minus1198771 11987711198771 minus1198771] [ 119909 (119905)
119909 (119905 minus 120578119898)](30)
minus int119905minus120578119898119905minus1205781
1199091015840119879 (119904) 11987721199091015840 (119904) 119889119904le 1120572 [119909119879 (119905 minus 120578119898) 119909119879 (119905 minus 1205781)]sdot [minus1198772 11987721198772 minus1198772] [119909 (119905 minus 120578119898)119909 (119905 minus 1205781)]
(31)
minus int119905minus1205781119905minus120578119872
1199091015840119879 (119904) 11987731199091015840 (119904) 119889119904le 1120572 [119909119879 (119905 minus 1205781) 119909119879 (119905 minus 120578119872)]sdot [minus1198773 11987731198773 minus1198773] [ 119909 (119905 minus 1205781)119909 (119905 minus 120578119872)]
(32)
where 120572 = (120578119872 minus 120578119898)2 For the convenience of the followingdiscussion we define
120576119879 (119905) = [119909119879 (119905) 119909119879 (119905 minus 120578119898) 119909119879 (119905 minus 1205781) 119909119879 (119905 minus 120578119872)sdot 1199091015840119879 (119905) 119909119879 (119905 minus 120578 (119905)) 120596119879 (119905)] (33)
Case 1 If 120578(119905) isin [120578119898 1205781] weighted technology based on theprinciple of Newton-Leibniz is introduced as follows
2 [120576119879 (119905) 120596119879 (119905)] 1198721 [119909 (119905 minus 120578119898) minus 119909 (119905 minus 120578 (119905))minus int119905minus120578119898119905minus120578(119905)
1199091015840119879 (119904) 119889119904] = 0(34)
and
2 [120576119879 (119905) 120596119879 (119905)] 1198731 [119909 (119905 minus 120578 (119905)) minus 119909 (119905 minus 1205781)minus int119905minus120578(119905)119905minus1205781
1199091015840119879 (119904) 119889119904] = 0(35)
Because 1198772 gt 0 we haveminus 2 [120576119879 (119905) 120596119879 (119905)] 1198721 int119905minus120578119898
119905minus120578(119905)1199091015840 (119904) 119889119904 le (120578 (119905) minus 120578119898)
sdot [120576119879 (119905) 120596119879 (119905)] 1198721119877minus12 1198721119879 [120576119879 (119905) 120596119879 (119905)]119879+ int119905minus120578119898119905minus120578(119905)
1199091015840119879 (119904) 11987721199091015840 (119904) 119889119904(36)
and
minus 2 [120576119879 (119905) 120596119879 (119905)] 1198731 int119905minus120578(119905)119905minus1205781
1199091015840 (119904) 119889119904 le (1205781 minus 120578 (119905))sdot [120576119879 (119905) 120596119879 (119905)] 1198731119877minus12 1198731119879 [120576119879 (119905) 120596119879 (119905)]119879+ int119905minus120578(119905)119905minus1205781
1199091015840119879 (119904) 11987721199091015840 (119904) 119889119904(37)
Therefore
minus 2 [120576119879 (119905) 120596119879 (119905)] 1198721 int119905minus120578119898119905minus120578(119905)
1199091015840 (119904) 119889119904minus 2 [120576119879 (119905) 120596119879 (119905)] 1198731 int119905minus120578(119905)
119905minus1205781
1199091015840 (119904) 119889119904le (120578 (119905) minus 120578119898)sdot [120576119879 (119905) 120596119879 (119905)] 1198721119877minus12 1198721119879 [120576119879 (119905) 120596119879 (119905)]119879+ (1205781 minus 120578 (119905))sdot [120576119879 (119905) 120596119879 (119905)] 1198731119877minus12 1198731119879 [120576119879 (119905) 120596119879 (119905)]119879+ int119905minus120578119898119905minus1205781
1199091015840119879 (119904) 11987721199091015840 (119904) 119889119904
(38)
In addition 119910119879(119905)119910(119905)minus1205742120596119879(119905)120596(119905) both on the left and rightsides of equality (29) and 119909119879(119905)1198781119909(119905) + [Θ0(119868 + Γ)1198701198660(119868 +119871)119909(119905 minus 120578(119905))]1198791198782Θ0(119868 + Γ)1198701198660(119868 + 119871)119909(119905 minus 120578(119905)) on the rightof the equal sign ldquo=rdquo and then inserting (30) (32) (34) (35)(38) to the obtained inequality we have
V1015840 (119905) + 119910119879 (119905) 119910 (119905) minus 1205742120596119879 (119905) 120596 (119905)le [120576119879 (119905) 120596119879 (119905)] Φ1 [120576119879 (119905) 120596119879 (119905)]119879+ (120578 (119905) minus 120578119898)sdot [120576119879 (119905) 120596119879 (119905)] 1198721119877minus12 1198721119879 [120576119879 (119905) 120596119879 (119905)]119879+ (1205781 minus 120578 (119905))sdot [120576119879 (119905) 120596119879 (119905)] 1198731119877minus12 1198731119879 [120576119879 (119905) 120596119879 (119905)]119879
(39)
where
8 Mathematical Problems in Engineering
Φ1 =
[[[[[[[[[[[[[[[[[[[[
Ξ1 1198771 + [1198802 (119860 + Δ119860)]119879 + 11987211 [1198803 (119860 + Δ119860)]119879 minus 11987311 [1198804 (119860 + Δ119860)]119879lowast minus1198771 + 11987212 + 11987212119879 11987213119879 minus 11987312 11987214119879lowast lowast minus1198773120572 minus 11987312 minus 11987312119879 1198773120572 minus 11987314119879lowast lowast lowast minus1198773120572lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
119875 minus 1198801 + [1198805 (119860 + Δ119860)]119879 Ψ1 + [1198806 (119860 + Δ119860)]119879 [1198807 (119860 + Δ119860)]119879 + [1198808 (119860 + Δ119860)]119879 + 1198801119867 0minus1198802 + 11987215119879 Ψ2 + 11987216119879 1198802119867 + 11987217119879 + 11987218119879 0minus1198803 minus 11987315119879 Ψ3 minus 11987316119879 1198803119867 minus 11987317119879 minus 11987318119879 0
minus1198804 Ψ4 1198804119867 012057811989821198771 + 120572 (1198772 + 1198773) minus 1198805 minus 1198805119879 Ψ5 minus 1198806119879 1198805119867 minus 1198807119879 minus 1198808119879 0
lowast Ψ6 Ξ2 0lowast lowast 1198807119867 + 1198808119867 + (1198807119867)119879 + (1198808119867)119879 0lowast lowast lowast minus1205742119868
]]]]]]]]]]]]]]]]]]]
Ξ1 = minus1198771 + 1198801 (119860 + Δ119860) + [1198801 (119860 + Δ119860)]119879 + 119862119879119862 + 1198781Ξ2 = [1198807 (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 + [1198808 (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 + 1198806119867 minus 11987217119879 minus 11987218119879 + 11987317119879
+ 11987318119879Ψ119894 = 119880119894 (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) + 1198731119894 minus 1198721119894 (119894 = 1 2 3 4 5) Ψ6 = 1198806 (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)
+ [1198806 (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 [Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 1198782Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) minus 11987216 minus 11987216119879 + 11987316+ 11987316119879
(40)
ifΦ1 + (120578 (119905) minus 120578119898) 1198721119877minus12 1198721119879
+ (1205781 minus 120578 (119905)) 1198731119877minus12 1198731119879 lt 0 (41)
Next we need to acquire the inequality (24) through atransformation based on inequality (41) which is equivalentto the following inequalities by applying the theory given inLemma 7 and the Schur complement also used byD Yue [38]in the previous study
[minus (1205781 minus 120578119898)minus1 1198772 1198721119879lowast Φ1 ] lt 0 (42)
[minus (1205781 minus 120578119898)minus1 1198772 1198731119879lowast Φ1 ] lt 0 (43)
Premultiplying and postmultiplying the inequalities above bydiag((1205781 minus 120578119898)119868 119868) we have
[minus1205721198772 Ω1119896lowast Φ1 ] lt 0 (44)
Applying the theory of the Schur complement to inequality(44) we have
[[[[[[[
minus (1198781 + 119862119879119862)minus1 0 0 lowast minus1198782minus1 0 Σlowast lowast minus1205721198772 Ω1119896lowast lowast lowast Φ10158401
]]]]]]]
lt 0 (45)
where
Mathematical Problems in Engineering 9
Φ11015840 =
[[[[[[[[[[[[[[[[[[[[
Ξ11015840 1198771 + [1198802 (119860 + Δ119860)]119879 + 11987211 [1198803 (119860 + Δ119860)]119879 minus 11987311 [1198804 (119860 + Δ119860)]119879lowast minus1198771 + 11987212 + 11987212119879 11987213119879 minus 11987312 11987214119879lowast lowast minus1198773120572 minus 11987312 minus 11987312119879 1198773120572 minus 11987314119879lowast lowast lowast minus1198773120572lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
119875 minus 1198801 + [1198805 (119860 + Δ119860)]119879 Ψ1 + [1198806 (119860 + Δ119860)]119879 [1198807 (119860 + Δ119860)]119879 + [1198808 (119860 + Δ119860)]119879 + 1198801119867 0minus1198802 + 11987215119879 Ψ2 + 11987216119879 1198802119867 + 11987217119879 + 11987218119879 0minus1198803 minus 11987315119879 Ψ3 minus 11987316119879 1198803119867 minus 11987317119879 minus 11987318119879 0minus1198804 Ψ4 1198804119867 0
12057811989821198771 + 120572 (1198772 + 1198773) minus 1198805 minus 1198805119879 Ψ5 minus 1198806119879 1198805119867 minus 1198807119879 minus 1198808119879 0lowast Ψ61015840 Ξ2 0lowast lowast 1198807119867 + 1198808119867 + (1198807119867)119879 + (1198808119867)119879 0lowast lowast lowast minus1205742119868
]]]]]]]]]]]]]]]]
Ξ11015840 = minus1198771 + 1198801 (119860 + Δ119860) + [1198801 (119860 + Δ119860)]119879Ψ61015840 = 1198806 (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) + [1198806 (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 minus 11987216 minus 11987216119879 + 11987316 + 11987316119879
Σ = [0 0 0 0 0 Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) 0 0]
(46)
Inequality (44) can be written as
[[[[[
minus (1198781 + 119862119879119862)minus1 0 0 lowast minus1198782minus1 0 Σlowast lowast minus1205721198772 Ω1119896lowast lowast lowast Φ101584010158401]]]]]
+ [[[[
000119863]]]]
119865 [[[[
000119864119879
]]]]
119879
+ [[[[
000119864119879
]]]]
119865119879[[[[[
000
]]]]]
119879
lt 0(47)
where
Φ110158401015840 =
[[[[[[[[[[[[[[[[[[[[
minus1198771 + 1198801119860 + (1198801119860)119879 1198771 + (1198802119860)119879 + 11987211 (1198803119860)119879 minus 11987311 (1198804119860)119879lowast minus1198771 + 11987212 + 11987212119879 11987213119879 minus 11987312 11987214119879lowast lowast minus1198773120572 minus 11987312 minus 11987312119879 1198773120572 minus 11987314119879lowast lowast lowast minus1198773120572lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
10 Mathematical Problems in Engineering
119875 minus 1198801 + (1198805119860)119879 Ψ110158401015840 + (1198806119860)119879 (1198807119860)119879 + (1198808119860)119879 + 1198801119867 0minus1198802 + 11987215119879 Ψ210158401015840 + 11987216119879 1198802119867 + 11987217119879 + 11987218119879 0minus1198803 minus 11987315119879 Ψ310158401015840 minus 11987316119879 1198803119867 minus 11987317119879 minus 11987318119879 0
minus1198804 Ψ41015840 1198804119867 012057811989821198771 + 120572 (1198772 + 1198773) minus 1198805 minus 1198805119879 Ψ510158401015840 minus 1198806119879 1198805119867 minus 1198807119879 minus 1198808119879 0
lowast Ψ610158401015840 Ξ210158401015840 0lowast lowast 1198807119867 + 1198808119867 + (1198807119867)119879 + (1198808119867)119879 0lowast lowast lowast minus1205742119868
]]]]]]]]]]]]]]]]]]]
Ξ210158401015840 = [1198807119861Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 + [1198808119861Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 + 1198806119867 minus 11987217119879 minus 11987218119879 + 11987317119879 + 11987318119879Ψ11989410158401015840 = 119880119894119861Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) + 1198731119894 minus 1198721119894 (119894 = 1 2 3 4 5)
Ψ61015840 = 1198806119861Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) + [1198806119861Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 minus 11987216 minus 11987216119879 + 11987316 + 11987316119879 = [1198641 0 0 0 0 1198642Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) 0 0]
(48)
With the definition of scalar 120576 gt 0 we apply the theory givenin Lemma 6 to (47) also used by Y Wang and L Xie [37]in which the uncertain matrix 119865 can be eliminated and asufficient condition of (47) is obtained
[[[[[[[
minus (1198781 + 119862119879119862)minus1 0 0 lowast minus1198782minus1 0 Σlowast lowast minus1205721198772 Ω1119896lowast lowast lowast Φ101584010158401
]]]]]]]
+ 120576 [[[[[[
01198630
]]]]]]
[[[[[[
01198630
]]]]]]
119879
+ 120576minus1[[[[[[[
000
119879
]]]]]]]
[[[[[[[
000
119879
]]]]]]]
119879
lt 0
(49)
Applying the Schur complement to inequality (49) we have
[[[[[[[[[[[[[[
minus120576119868 0 0 0 120576119879 0lowast minus (1198781 + 119862119879119862)minus1 0 0 0lowast lowast minus1198782minus1 0 Σ 0lowast lowast lowast minus1205721198772 Ω1119896 0lowast lowast lowast lowast Φ101584010158401 119879lowast lowast lowast lowast lowast minus120576119868
]]]]]]]]]]]]]]
lt 0
(50)
There exists 1205881 gt 0 1205882 gt 0 Based on (17) and Remark 3 inSection 2 we know that 119871119879119871 le 119868 and Γ119879Γ le 119868 According
to expressions (47) (49) and (50) we obviously know that1198805 gt 0 Using Lemma 6 again we have
Θ0 (119868 + Γ) 1198701198660119871 + [Θ0 (119868 + Γ) 1198701198660119871]119879le 1205881minus1Θ0 (119868 + Γ) 11987011986601198805minus1 [Θ0 (119868 + Γ) 1198701198660]119879
+ 12058811198805(51)
and
Θ0Γ1198701198660 + (Θ0Γ1198701198660)119879le 1205882minus1Θ0Θ0119879 + 1205882 (1198701198660)1198791198701198660
(52)
Based on inequalities (51) (52) and the Schur complementwe know inequality (24) is a sufficient condition of inequality(50) while inequality (50) is equivalent to inequality (41)Therefore we can undoubtedly obtain inequality (24) asa sufficient condition of inequality (41) Thus based oninequality (39) and (41) we know(1) if120596(119905) equiv 0 obviously we have V1015840(119905) lt 0 so system (21)is asymptotically stable(2) if 119909(0) equiv 0 we know V(0) = 0 In addition it can beobtained that V(infin) ge 0
Therefore
intinfin0
V1015840 (119905) + 119910119879 (119905) 119910 (119905) minus 1205742120596119879 (119905) 120596 (119905) 119889119905= V (infin) + intinfin
0119910119879 (119905) 119910 (119905) minus 1205742120596119879 (119905) 120596 (119905) 119889119905 lt 0
(53)
Thus
intinfin0
119910119879 (119905) 119910 (119905) lt intinfin0
1205742120596119879 (119905) 120596 (119905) 119889119905 (54)
Mathematical Problems in Engineering 11
Because 120596(119905) isin 1198712[0 infin) we have1003817100381710038171003817119910 (119905)1003817100381710038171003817 le 120574 120596 (119905)119879 (55)
It is known that model (21) is asymptotically stable with the119867infin norm bound 120574Moreover according to (39) and (41) we have
V1015840 (119905) le minus119909119879 (119905) 1198781119909 (119905)minus [Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) 119909 (119905 minus 120578 (119905))]119879
sdot 1198782Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) 119909 (119905 minus 120578 (119905))(56)
Through the integral operation it can be determined that119869 le V(0) In addition by inserting 119905 = 0 into the Lyapunov-Krasovskii function shown as expression (28) the upperbound of cost function 119869 can be obtained and shown asexpression (26) Therefore the theorem is verified if 119897 = 1Case 2 If 120578(119905) isin [1205781 120578119872] weighted technology based on theprinciple of Newton-Leibniz is introduced as follows
2 [120576119879 (119905) 120596119879 (119905)] 1198722 [119909 (119905 minus 1205781) minus 119909 (119905 minus 120578 (119905))minus int119905minus1205781119905minus120578(119905)
1199091015840119879 (119904) 119889119904] = 0(57)
2 [120576119879 (119905) 120596119879 (119905)] 1198732 [119909 (119905 minus 120578 (119905)) minus 119909 (119905 minus 120578119872)minus int119905minus120578(119905)119905minus120578119872
1199091015840119879 (119904) 119889119904] = 0(58)
Because 1198773 gt 0 we have
minus 2 [120576119879 (119905) 120596119879 (119905)] 1198722 int119905minus1205781119905minus120578(119905)
1199091015840 (119904) 119889119904 le (120578 (119905) minus 1205781)sdot [120576119879 (119905) 120596119879 (119905)] 1198722119877minus13 1198722119879 [120576119879 (119905) 120596119879 (119905)]119879+ int119905minus1205781119905minus120578(119905)
1199091015840119879 (119904) 11987731199091015840 (119904) 119889119904(59)
minus 2 [120576119879 (119905) 120596119879 (119905)] 1198732 int119905minus120578(119905)119905minus120578119872
1199091015840 (119904) 119889119904 le (120578119872 minus 120578 (119905))sdot [120576119879 (119905) 120596119879 (119905)] 1198732119877minus13 1198731119879 [120576119879 (119905) 120596119879 (119905)]119879+ int119905minus120578(119905)119905minus120578119872
1199091015840119879 (119904) 11987731199091015840 (119904) 119889119904(60)
Therefore
minus 2 [120576119879 (119905) 120596119879 (119905)] 1198722 int119905minus1205781119905minus120578(119905)
1199091015840 (119904) 119889119904
minus 2 [120576119879 (119905) 120596119879 (119905)] 1198732 int119905minus120578(119905)119905minus120578119872
1199091015840 (119904) 119889119904le (120578 (119905) minus 1205781)sdot [120576119879 (119905) 120596119879 (119905)] 1198722119877minus13 1198722119879 [120576119879 (119905) 120596119879 (119905)]119879+ (120578119872 minus 120578 (119905))sdot [120576119879 (119905) 120596119879 (119905)] 1198732119877minus13 1198732119879 [120576119879 (119905) 120596119879 (119905)]119879
+ int119905minus1205781119905minus120578119872
1199091015840119879 (119904) 11987731199091015840 (119904) 119889119904
(61)
In addition 119910119879(119905)119910(119905)minus1205742120596119879(119905)120596(119905) both on the left and rightsides of equality (29) and 119909119879(119905)1198781119909(119905) + [Θ0(119868 + Γ)1198701198660(119868 +119871)119909(119905minus120578(119905))]1198791198782Θ0(119868+Γ)1198701198660(119868+119871)119909(119905minus120578(119905)) on the right sideof equal sign ldquo=rdquo By inserting (30) (31) (57) (58) and (61)into the obtained inequality the item minus int119905minus1205781
119905minus1205781198721199091015840119879(119904)11987731199091015840(119904)119889119904
can be offset while the item minus int119905minus120578119898119905minus1205781
1199091015840119879(119904)11987721199091015840(119904)119889119904 is offsetin Case 1 Then in the same methods of transformation asCase 1 the inequality (24) when 119897 = 2 can be obtainedTherefore the proof is complete
Remark 9 In the two different cases a variational weightingmatrix and Jessenrsquos inequalities are used to derive the 119867infinguaranteed cost fault-tolerant condition of the system inwhich more delay information is employed to reduce theconservatism
The next section will provide sufficient conditions fordesigning the guaranteed cost fault-tolerant control for adouble-fault NCS
4 Guaranteed Cost Fault-Tolerant Control ofDouble-Fault NCS
Inequality (24) is not linear with respect to the gain matricesof the controller so it is needs to be reformulated into LMIsvia a change of variables
Theorem 10 Given symmetric positive definite matrices 1198781and 1198782 a set of constant 120578119898 120578119872 1205881 gt 0 1205882 gt 0 120582119894 (119894 = from1 to 7) and 120572 = (120578119872 minus 120578119898)2 If there exists a set of symmetricpositive definite matrices 119895 (119895 = 1 2 3)119883 andmatrix gt 0as well as matrices 1120573 2120573 1120573 2120573 (120573 =from 1 to 8)
12 Mathematical Problems in Engineering
119884 and a set of constants 120576 gt 0 and 120583 gt 0 satisfying theLMIs
[[[[[[[[[[[[[[[[[[[[[[[[[[
minus120576119868 0 0 0 120576119863119879lowast minus (1198781 + 119862119879119862)minus1 0 0 Πlowast lowast minus1198782minus1 0 Σlowast lowast lowast minusΓ119897 Ω119897119896lowast lowast lowast lowast Φ119897lowast lowast lowast lowast lowastlowast lowast lowast lowast lowastlowast lowast lowast lowast lowastlowast lowast lowast lowast lowastlowast lowast lowast lowast lowast
0 0 0 0 00 0 0 0 00 Θ0119884 0 Θ0 00 0 0 0 0
119864119879 Θ 119883 Δ 119884119879minus120576119868 1198642Θ0119884 0 1198642Θ0 0lowast minus1205881119883119879 0 0 119884119879lowast lowast minus1205881minus1119883 0 0lowast lowast lowast minus1205882119868 0lowast lowast lowast lowast minus1205882minus1119868
]]]]]]]]]]]]]]]]]]]]]]
lt 0
119897 = 1 2 119896 = 1 2(62)
where
Φ1 =
[[[[[[[[[[[[[[[[[[[[[
minus1 + 1205821119860119883119879 + 1205821119883119860119879 1 + 1205822119883119860119879 + 11 1205823119883119860119879 minus 11 1205824119883119860119879lowast minus1 + 12 + 12119879 13119879 minus 12 14119879lowast lowast minus3120572 minus 12 minus 12119879 3120572 minus 14119879lowast lowast lowast minus3120572lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
minus 1205821119883119879 + 119883119860119879 Ψ1 + 1205825119883119860119879 1205826119883119860119879 + 1205827119883119860119879 + 1205821119867119883119879 0minus1205822119883119879 + 15119879 Ψ2 + 16119879 1205822119867119883119879 + 17119879 + 18119879 0minus1205823119883119879 minus 15119879 Ψ3 minus 16119879 1205823119867119883119879 minus 17119879 minus 18119879 0
minus1205824119883119879 Ψ4 1205824119867119883119879 012057811989821 + 120572 (2 + 3) minus 119883119879 minus 119883 Ψ5 minus 1205825119883 119867119883119879 minus 1205826119883 minus 1205827119883 0
lowast Ψ6 Ξ 0lowast lowast 1205826119867119883119879 + 1205827119867119883119879 + 1205826119883119867119879 + 1205827119883119867119879 0lowast lowast lowast minus120583119868
]]]]]]]]]]]]]]]]]
Φ2 =
[[[[[[[[[[[[[[[[[[[[[
minus1 + 1205821119860119883119879 + 1205821119883119860119879 1 + 1205822119883119860119879 1205823119883119860119879 + 21 1205824119883119860119879 minus 21lowast minus1 minus 2120572 2120572 + 22 minus22lowast lowast minus2120572 + 23 + 23119879 24119879 minus 23lowast lowast lowast minus24 minus 24119879lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
Mathematical Problems in Engineering 13
minus 1205821119883119879 + 119883119860119879 Ψ11015840 + 1205825119883119860119879 1205826119883119860119879 + 1205827119883119860119879 + 1205821119867119883119879 0minus1205822119883119879 Ψ21015840 1205822119867119883119879 0
minus1205823119883119879 + 25119879 Ψ31015840 + 26119879 1205823119867119883119879 + 27119879 + 28119879 0minus1205824119883119879 minus 25119879 Ψ41015840 minus 26119879 1205824119867119883119879 minus 27119879 minus 28119879 0
12057811989821 + 120572 (2 + 3) minus 119883 minus 119883119879 Ψ51015840 minus 1205825119883 119867119883119879 minus 1205826119883 minus 1205827119883 0lowast Ψ61015840 Ξ1015840 0lowast lowast 1205826119867119883119879 + 1205827119867119883119879 + 1205826119883119867119879 + 1205827119883119867119879 0lowast lowast lowast minus120583119868
]]]]]]]]]]]]]]]]]]]]]
Γ1 = 1205721198772Γ1 = 1205722Γ2 = 1205723
Ω11 = 1205721119879Ω12 = 1205721119879Ω21 = 1205722119879Ω22 = 1205722119879
1119879 = [11119879 12119879 13119879 14119879 15119879 16119879 17119879 18119879] 2119879 = [21119879 22119879 23119879 24119879 25119879 26119879 27119879 28119879]
1119879 = [11119879 12119879 13119879 14119879 15119879 16119879 17119879 18119879] 1198732119879 = [21119879 22119879 23119879 24119879 25119879 26119879 27119879 28119879]
Ξ = 1205826 (119861Θ0119884)119879 + 1205827 (119861Θ0119884)119879 + 1205825119867119883119879 minus 17119879 minus 18119879 + 17119879 + 18119879Ψ119894 = 120582119894119861Θ0119884 + 1119894 minus 1119894 (119894 = 1 2 3 4)
Ψ5 = 119861Θ0119884 + 1119894 minus 1119894Ψ6 = 1205825119861Θ0119884 + 1205825 (119861Θ0119884)119879 minus 11987216 minus 11987216119879 + 11987316 + 11987316119879
Ξ1015840 = 1205826 (119861Θ0119884)119879 + 1205827 (119861Θ0119884)119879 + 1205825119867119883119879 minus 27119879 minus 28119879 + 27119879 + 28119879Ψ1198941015840 = 120582119894119861Θ0119884 + 2119894 minus 2119894 (119894 = 1 2 3 4)
Ψ51015840 = 119861Θ0119884 + 2119894 minus 2119894Ψ61015840 = 1205825119861Θ0119884 + 1205825 (119861Θ0119884)119879 minus 26 minus 26119879 + 26 + 26119879
119863 = [1205821119863119879 1205822119863119879 1205823119863119879 1205824119863119879 119863119879 1205825119863119879 1205826119863119879 + 1205827119863119879 0]119879 119864 = [1198641119883119879 0 0 0 0 1198642Θ0119884 0 0]
119883 = [0 0 0 0 0 119883119879 0 0]119879 Π = [119883119879 0 0 0 0 0 0 0]
14 Mathematical Problems in Engineering
Θ = [(1205821119861Θ0119884)119879 (1205822119861Θ0119884)119879 (1205823119861Θ0119884)119879 (1205824119861Θ0119884)119879 (119861Θ0119884)119879 (1205825119861Θ0119884)119879 (1205826119861119884)119879 + (1205827119861119884)119879 0]119879 Δ = [(1205821119861Θ0)119879 (1205822119861Θ0)119879 (1205823119861Θ0)119879 (1205824119861Θ0)119879 (119861Θ0)119879 (1205825119861Θ0)119879 (1205826119861Θ0)119879 + (1205827119861Θ0)119879 0]119879
119884 = [0 0 0 0 0 119884 0 0] Σ = [0 0 0 0 0 Θ0119884 0 0]
(63)
then the 119867infin guaranteed cost control gain 119870 = 119884119883minus1198791198660minus1 canrendermodel (21) to be asymptotically stable with the119867infin normbound 120574 = radic120583 13e upper bound 1198690 of cost function 119869 is givenas
1198690 = 119909119879 (0) 119883minus1119883minus119879119909 (0)+ 120578119898 int0
minus120578119898
int0119904
1199091015840119879 (120591) 119883minus11119883minus1198791199091015840 (120591) 119889119904119889120591+ intminus120578119898minus1205781
int0119904
1199091015840119879 (120591) 119883minus12119883minus1198791199091015840 (120591) 119889119904119889120591+ intminus1205781minus120578119872
int0119904
1199091015840119879 (120591) 119883minus13119883minus1198791199091015840 (120591) 119889119904119889120591
(64)
Proof The proof is based on a suitable transformation anda change of variables allowing us to obtain inequality (24)in Theorem 8 First we define 1198805 = 1198800 119880119894 = 1205821198941198800 (119894 =from 1 to 4) 1198806 = 12058251198800 in (24) Because we consider thedimension of state119909is equal to that of outside disturbance120596 in this paper we can also define 1198807 = 12058261198800 1198808 =12058271198800 Obviously (24) implies 1198805 gt 0 so 1198800 is nonsingularThen using the analysis method of D Yue [40] and Z Wang[41] pre- and postmultiplying both sides of inequality (24)with diag(119868 119868 119868 119883 119868 119883 119868 119868 119868) and its transpose where = diag(119883 119883 119883 119883 119883 119883 119883 119883) and 119883 = 1198800minus1 introducingnew variables 119883119875119883119879 = 119883119877119895119883119879 = 119895 (119895 = 1 2 3)119883119872119897120573119883119879 = 119897120573 119883119873119897120573119883119879 = 119897120573 (119897 = 1 2 120573 = 1 2 sdot sdot sdot 8)1198701198660119883119879 = 119884 and 120583 = 1205742 From the definition of 1198660 we know1198660 is invertible so 119870 can be obtained by calculating 119870 =119884119883minus1198791198660minus1 It is easy to see that 10 and (64) respectively imply(24) and (26) Therefore from Theorem 8 we can completethe proof
To obtain the optimal bound 119869lowast shown in (26) thecommonly used method is to consider it as an optimizationproblem like [42] in which the expression of initial state 119909(119905)(119905 isin [minus120578119872 0]) needs to be known The expression of initialstate is not given in this paper Therefore the optimizationmethod used in [42] cannot be used here A practical methodto obtain 119869lowast also used by D Yue [43] is employed as follows
Suppose 1199091015840(119905) is bounded if 119905 isin [minus120578119872 0] and satisfying1199091015840119879(120591)1199091015840(120591) le ℓ In addition suppose that there exists 120573119894 gt0 (119894 = 1 2 3) satisfying119883minus1119894119883minus119879 le 120573119894119868 119894 = 1 2 3119883minus1119883minus119879 le 1205734119868 (65)
Inserting this into (64) we have
1198690 le 1205734119909119879 (0) 119909 (0) + 05ℓ12057311205781198983 + 05ℓ1205732 (12057812 minus 1205781198982)+ 05ℓ1205733 (1205781198722 minus 12057812) = 119869lowast (66)
Applying the Schur complement to the inequalities above wehave
[minus120573119894119868 119883minus1lowast minus119877119894minus1] lt 0 119894 = 1 2 3
[minus1205734119868 119883minus1lowast minus119875minus1] lt 0
(67)
Then combining 10 and (67) 119894minus1 119894 (119894 = 1 2 3)minus1 119883minus1 119883 exist simultaneously We cannot directly usethe LMI tools to solve the problem Defining 119894minus1 = 119894(119894 = 1 2 3) minus1 = 119883minus1 = and using the idea of thecone complementary linearization algorithm the guaranteedcost fault-tolerant controller of system (21) and the value ofoptimal performance indicator 119869lowast can be obtained in thefollowing method
Minimize 119905119903119886119888119890 (11 + 22 + 33 + + )+ 1205734 + 0512057311205781198983 + 051205732 (12057812 minus 1205781198982)+ 051205733 (1205781198722 minus 12057812)
Subject to 119868119899119890119902119906119886119897119894119905119894119890119904 (62) [minus120573119894119868
lowast minus119894] lt 0 (119894 = 1 2 3)
[minus1205734119868 lowast minus] lt 0
[119883 119868lowast ] ge 0
[1 119868lowast 1] ge 0
[2 119868lowast 2] ge 0
Mathematical Problems in Engineering 15
[3 119868lowast 3] ge 0
[ 119868lowast ] ge 0
119894 gt 0 (119894 = 1 2 3) (68)
5 Simulations
Example 11 Consider inverted pendulum model that canusually be modelled as (1) and the system parameters aregiven as follows
119860 = [minus2 1110 4 ]
119861 = [01minus4]
119862 = [minus03151 01011 03]
119867 = [015 minus056minus01 032 ]
Δ119860 = [004 sin 119905 015 sin 119905minus02 sin 119905 075 sin 119905]
Δ119861 = [002 sin 119905minus01 sin 119905]
119863 = [ 01minus05]
119865 (119905) = sin 119905
(69)
Therefore we have
1198641 = [04 15] 1198642 = 02 (70)
For this simulation the initial state of system is assumed119909(0) = [2 minus1]119879 and the external disturbance is considered as120596(119905) = [015 minus05]119879 3119904 le 119905 le 4119904
0 119900119905ℎ119890119903119904 Here we take the upper
bound of time-varying delay as 120578119872 = 03119904 and its lower boundas 120578119898 = 0119904 namely 0 le 120578(119905) le 03 In addition the faultbounds of the system are given in Table 1
Table 1 The bounds of faults
Symbol Upper bound Lower boundActuatorfaultsΘ 136 009
SensorFaults119866
[[
165 00 175]
][[
0 00 015]
]
minus01
0
01
02
03
04
05
Del
ay
1 2 3 4 5 60Time s
Figure 2 The time-varying delay in double-fault NCS
We choose the parameters as follows
1205821 = 011205822 = 0151205823 = minus0641205824 = 031205825 = 1205826 = 0351205827 = 181198782 = 0311205881 = 30001205882 = 22032ℓ = 1
1198781 = [10013 00 9207]
(71)
By taking advantage of the LMI tool box and inserting theabove parameters into inequalities 10 and (68) we can obtainthe 119867infin guaranteed cost control gain
119870 = 119884119883minus1198791198660minus1 = [85163 151398] (72)
with 120574 = radic120583 = 1952516The corresponding optimal performance indicator (the
upper bound value of guaranteed cost function) is 119869lowast =83162563The time-varying delay is shown in Figure 2 In Figure 3
(a) is the actuator fault which is a piecewise-linear function
16 Mathematical Problems in Engineering
002040608
1121416
Actu
ator
faul
t
1 2 3 4 5 60Time s
(a) Time-varying actuator fault
minus020
02040608
112141618
Sens
or fa
ult
1 2 3 4 5 60Time s
(b) Time-varying sensor fault
Figure 3 The time-varying faults
x1
x2
1 2 3 4 5 60Time s
minus15
minus1
minus05
0
05
1
15
2
Stat
e X
Figure 4 The state response curve of double-fault NCS
1 2 3 4 5 60Time s
minus8minus7minus6minus5minus4minus3minus2minus1
012
Con
trol i
nput
Figure 5 The control input of double-fault NCS
It keeps the minimum value from 13119904 to 17119904 while it keepsthe maximum value from 37119904 to 43119904 The sensor faults areshown as (b) which is sinusoidal It should be noted thatthe green dotted line represents the fault of sensor 1 whilethe blue solid line represents the fault of sensor 2 Throughthe state response of the double-fault NCS shown in Figure 4and corresponding control signal shown in Figure 5 we know
x1
x2
1 2 3 4 5 60Time s
minus8
minus6
minus4
minus2
0
2
4
6
Stat
e X
Figure 6 The state response curve of double-fault NCS
the 119867infin guaranteed cost controller designed in this paper isable to make the double-fault NCS asymptotically stable Thesystem gets preliminarily steady at 2119904 and its state can returnto the equilibrium position in a certain period of time whenthe NCS is affected by external disturbance Compared withthe state response of worse stability shown in Figure 6 whenthe method proposed in [28] is used for this double-faultproblem it sufficiently proves the effectiveness and feasibilityof the method proposed in this paper
To better illustrate the effectiveness of the method pro-posed in this paper the following example is presented
Example 12 Consider the parameters of system (1) as follows
119860 = [[[[[[
021 0 035 10 minus53 minus586 323
365 minus11 minus156 minus0890 0 minus158 minus285
]]]]]]
119861 = [559 12 minus089 13]119879 119862 = [17 02 015 minus018]
Mathematical Problems in Engineering 17
minus15
minus1
minus05
0
05
1
15
Stat
e X1 2 3 4 5 6 7 8 9 100
Time s
R1R2
R3R4
Figure 7 The state response curve of double-fault NCS
Δ119860 = [[[[
082 sin 119905 0 0 00 012 sin 119905 0 00 0 minus058 sin 119905 00 0 0 101 sin 119905]]]]
Δ119861 = [[[[
minus015 sin 119905008 sin 1199050minus028 sin 119905]]]]
119867 = [[[[
minus041 096 052 0006 minus057 0 021121 0 059 0minus032 minus011 minus035 minus003]]]]
119863 = 1198684times4119865 (119905) = diag (sin 119905 sin 119905 sin 119905 sin 119905)
(73)
Therefore we have
1198641 = diag (082 012 minus058 101) 1198642 = [minus015 008 0 minus028]119879 (74)
For this simulation the initial state of system is assumedas 119909(0) = [121 minus051 023 minus018]119879 and the externaldisturbance is considered as
120596 (119905) = [015 cos 119905 015 cos 119905 minus012 sin 119905 minus025 cos 119905]119879 6119904 le 119905 le 81199040 119900119905ℎ119890119903119904 (75)
The uncertain time-varying delay satisfies 0 le 120578(119905) le023119904 In addition the fault bounds of the system are givenin Table 2 Other parameters are selected as follows
1205821 = 121205822 = minus2031205823 = 1681205824 = minus231205825 = minus1051205826 = 6051205827 = 5121198781 = diag (19888 15634 8709 12876) 1198782 = 586
1205881 = 57981205882 = 1879ℓ = 1
(76)
By taking advantage of the LMI tool box and submittingthese parameters above into inequalities 10 and (68) we canobtain the 119867infin guaranteed cost control gain
119870 = 119884119883minus1198791198660minus1= [minus17256 15512 minus08571 07451]
with 120574 = radic120583 = 5819806(77)
The corresponding optimal performance indicator is 119869lowast =65021047 From the state response shown in Figure 7 andcontrol signal shown in Figure 8 we undoubtedly know
18 Mathematical Problems in Engineering
Table 2 The bounds of faults
Symbol Upper bound Lower boundActuatorfaultsΘ 150 012
SensorFaults119866
[[[[[[[[
185 0 0 00 160 0 00 0 125 00 0 0 165
]]]]]]]]
[[[[[[[[
025 0 0 00 0 0 00 0 0 00 0 0 015
]]]]]]]]
minus4
minus3
minus2
minus1
0
1
2
Con
trol i
nput
1 2 3 4 5 6 7 8 9 100Time s
Figure 8 The control input of double-fault NCS
the double-fault NCS is asymptotically stable when the 119867infinguaranteed cost controller is used This further demonstratesthe feasibility and effectiveness of the method proposed inthis paper
6 Conclusions
The issues of modelling and 119867infin guaranteed cost fault-tolerant control of double-fault networked control systemshave been addressedThe closed-loopmodel of a double-faultNCS is set up with regard to the influences of transmissiondelay packet dropout uncertain parameters and externaldisturbance In addition the piecewise delay method is pro-posed to reduce the conservatism when analysing the delay-dependent faulty system With the help of Lee Y Srsquos lemmathe sufficient condition of guaranteed cost fault-tolerantfor time-varying double-fault NCS is introduced using theLyapunov-Krasovskii theory and weighted technology Themethod of designing a guaranteed cost fault-tolerant con-troller for this NCS is given based on LMI Our next researchtask will be choosing more reasonable values of parameters120582119894 (119894 = 1 2 3 4 5 6 7) to reduce the conservatism further Ofcourse the study on scheduling policy of double-fault NCS isalso a challenge but indispensable work
Data Availability
The data used in this paper can be got by simulations
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was partly supported by National Nature Sci-ence Foundation of China under Grants 51875380 51375323and 61563022 Cooperative Innovation Fund-Prospective ofJiangsu Province under Grant BY2016044-01Major Programof Natural Science Foundation of Jiangxi Province Chinaunder Grant 20152ACB20009 High Level Talents of ldquoSix Tal-ent Peaksrdquo in Jiangsu Province China under Grant DZXX-046
References
[1] H Zhang Y Shi J Wang and H Chen ldquoA New Delay-compensation Scheme for Networked Control Systems inController Area Networksrdquo IEEE Transactions on IndustrialElectronics vol 65 no 9 pp 7239ndash7247 2018
[2] A Da Silva and C Kawan ldquoRobustness of critical bit rates forpractical stabilization of networked control systemsrdquo Automat-ica vol 93 pp 397ndash406 2018
[3] Q Zhu K Lu and Y Zhu ldquoGuaranteed cost control ofnetworked control systems under transmission control protocolwith active queue managementrdquo Asian Journal of Control vol18 no 4 pp 1546ndash1557 2016
[4] Q Zhu K Lu and Y Zhu ldquoHinfin Guaranteed Cost Control forNetworked Control Systems under Scheduling Policy Based onPredicted Errorrdquo Mathematical Problems in Engineering vol2014 Article ID 586029 12 pages 2014
[5] W H Chen J X Xu and Z H Guan ldquoGuaranteed cost controlfor uncertain Markovian jump systems with mode-dependenttime-delaysrdquo IEEE Transactions on Automatic Control vol 48no 12 pp 2270ndash2277 2003
[6] HM Soliman A DabroumM S Mahmoud andM SolimanldquoGuaranteed-cost reliable control with regional pole placementof a power systemrdquo Journal of 13e Franklin Institute vol 348no 5 pp 884ndash898 2011
[7] X Li and X-B Wu ldquoGuaranteed cost fault-tolerant controllerdesign of networked control systems under variable-periodsamplingrdquo Information Technology Journal vol 8 no 4 pp 537ndash543 2009
[8] L Zhang and G Orosz ldquoMotif-Based Design for ConnectedVehicle Systems in Presence of Heterogeneous ConnectivityStructures and Time Delaysrdquo IEEE Transactions on IntelligentTransportation Systems vol 17 no 6 pp 1638ndash1651 2016
[9] Z Li G Guo and Z Liu ldquoCommunication parameter designfor networked control systems with the slotted ALOHA accessprotocolrdquo Information Sciences vol 447 pp 205ndash215 2018
[10] K Lu G Jing and L Wang ldquoDistributed algorithm for solv-ing convex inequalitiesrdquo Institute of Electrical and ElectronicsEngineers Transactions on Automatic Control vol 63 no 8 pp2670ndash2677 2018
[11] Q Zhu K Lu and Y Zhu ldquoObserver-based feedback controlof networked control systems with delays and packet dropoutsrdquoJournal of Dynamic SystemsMeasurement andControl vol 138no 2 pp 1ndash8 2016
Mathematical Problems in Engineering 19
[12] Y Li H Li and W Sun ldquoEvent-triggered control for robust setstabilization of logical control networksrdquo Automatica vol 95pp 556ndash560 2018
[13] X Luan P Shi and F Liu ldquoStabilization of networked controlsystems with random delaysrdquo IEEE Transactions on IndustrialElectronics vol 58 no 9 pp 4323ndash4330 2011
[14] Y Zhang and J Jiang ldquoBibliographical review on reconfigurablefault-tolerant control systemsrdquo Annual Reviews in Control vol32 no 2 pp 229ndash252 2008
[15] N H Ei-Farra A Gani and P D Christofides ldquoFault-tolerantcontrol of process systems using communication networksrdquoAIChE Journal vol 51 no 6 pp 1665ndash1682 2005
[16] H R Karimi and H Gao ldquoNew delay-dependent exponentialHinfin synchronization for uncertain neural networks withmixedtime delaysrdquo IEEE Transactions on Systems Man and Cybernet-ics Part B Cybernetics vol 40 no 1 pp 173ndash185 2010
[17] Y N Guo Q Y Zhang D W Gong and J H Zhang ldquoRobustfault-tolerant control of networked control systems with time-varying delaysrdquoControl andDecision vol 23 no 6 pp 689ndash6922008
[18] Z Mao and B Jiang ldquoFault identification and fault-tolerantcontrol for a class of networked control systemsrdquo InternationalJournal of Innovative Computing Information and Control vol3 no 5 pp 1121ndash1130 2007
[19] C-X Yang Z-H Guan and J Huang ldquoStochastic fault tolerantcontrol of networked control systemsrdquo Journal of 13e FranklinInstitute vol 346 no 10 pp 1006ndash1020 2009
[20] Z Mao Y Pan B Jiang and W Chen ldquoFault Detectionfor a Class of Nonlinear Networked Control Systems withCommunication Constraintsrdquo International Journal of ControlAutomation and Systems vol 16 no 1 pp 256ndash264 2018
[21] A Qiu J Gu C Wen and J Zhang ldquoSelf-triggered faultestimation and fault tolerant control for networked controlsystemsrdquo Neurocomputing vol 272 no 1 pp 629ndash637 2018
[22] Q Zhu K Lu G Xie and Y Zhu ldquoGuaranteed Cost Fault-Tolerant Control for Networked Control Systems with SensorFaultsrdquoMathematical Problems in Engineering vol 2015 ArticleID 549347 9 pages 2015
[23] W Wu and Y Zhang ldquoEvent-triggered fault-tolerant controland scheduling codesign for nonlinear networked control sys-tems with medium-access constraint and packet disorderingrdquoInternational Journal of Robust and Nonlinear Control vol 28no 4 pp 1182ndash1198 2018
[24] X Xiao and X-J Li ldquoAdaptive dynamic programming method-based synchronisation control of a class of complex dynamicalnetworks with unknown dynamics and actuator faultsrdquo IETControl 13eory amp Applications vol 12 no 2 pp 291ndash298 2018
[25] PMhaskar AGani CMcFall PDChristofides and J FDavisldquoFault-tolerant control of nonlinear process systems subject tosensor faultsrdquo AIChE Journal vol 53 no 3 pp 654ndash668 2007
[26] M Liu P Shi L Zhang and X Zhao ldquoFault-tolerant controlfor nonlinear Markovian jump systems via proportional andderivative sliding mode observer techniquerdquo IEEE Transactionson Circuits and Systems I Regular Papers vol 58 no 11 pp2755ndash2764 2011
[27] S Li D Sauter C Aubrun and J Yame ldquoStability guaranteedactive fault-tolerant control of networked control systemsrdquoJournal of Control Science and Engineering vol 2008 Article ID189064 9 pages 2008
[28] X Y Luo M J Shang C L Chen and X P Guan ldquoGuaranteedcost active fault-tolerant control of networked control system
with packet dropout and transmission delayrdquo InternationalJournal of Automation and Computing vol 7 no 4 pp 509ndash5152010
[29] Q Zhu B Xie and Y Zhu ldquoGuaranteed Cost Control forMultirate Networked Control Systems with Both Time-Delayand Packet-Dropoutrdquo Mathematical Problems in Engineeringvol 2014 Article ID 637329 9 pages 2014
[30] R Manivannan R Samidurai J Cao and M Perc ldquoDesign ofResilient Reliable Dissipativity Control for Systems with Actu-ator Faults and Probabilistic Time-Delay Signals via Sampled-Data Approachrdquo IEEE Transactions on Systems Man andCybernetics Systems 2018
[31] R Manivannan R Samidurai J Cao A Alsaedi and F EAlsaadi ldquoNon-Fragile Extended Dissipativity Control Designfor Generalized Neural Networks with Interval Time-DelaySignalsrdquo Asian Journal of Control 2019
[32] Q Gao and N Olgac ldquoBounds of imaginary spectra of LTIsystems in the domain of two of the multiple time delaysrdquoAutomatica vol 72 pp 235ndash241 2016
[33] Q Gao A S Kammer U Zalluhoglu and N Olgac ldquoCriticaleffects of the polarity change in delayed states within anLTI dynamics with multiple delaysrdquo Institute of Electrical andElectronics Engineers Transactions onAutomatic Control vol 60no 11 pp 3018ndash3022 2015
[34] Q Gao Z Zhang and C Yang ldquoSign inverting control andits important properties for multiple time-delayed systemsrdquo inProceedings of the 10th ASME Dynamic Systems and ControlConference pp 979ndash984 Virginia USA 2017
[35] Y M Zhang and J Jiang ldquoActive fault-tolerant control systemagainst partial actuator failuresrdquo IEE Proceedings Control13eoryand Applications vol 149 no 1 pp 95ndash104 2002
[36] G Garcia J Bernussou andD Arzelier ldquoRobust stabilization ofdiscrete-time linear systems with norm-bounded time-varyinguncertaintyrdquo Systems amp Control Letters vol 22 no 5 pp 327ndash339 1994
[37] Y Wang L Xie and C E de Souza ldquoRobust control of a classof uncertain nonlinear systemsrdquo Systems amp Control Letters vol19 no 2 pp 139ndash149 1992
[38] D Yue E Tian and Y Zhang ldquoA piecewise analysis methodto stability analysis of linear continuousdiscrete systems withtime-varying delayrdquo International Journal of Robust and Non-linear Control vol 19 no 13 pp 1493ndash1518 2009
[39] X-J Jing D-L Tan and Y-C Wang ldquoAn LMI approach tostability of systems with severe time-delayrdquo IEEE Transactionson Automatic Control vol 49 no 7 pp 1192ndash1195 2004
[40] D Yue Q-L Han and J Lam ldquoNetwork-based robust Hinfincontrol of systems with uncertaintyrdquo Automatica vol 41 no 6pp 999ndash1007 2005
[41] Z Wang F Yang D W C Ho and X Liu ldquoRobust Hinfincontrol for networked systemswith randompacket lossesrdquo IEEETransactions on Systems Man and Cybernetics Part B vol 37no 4 pp 916ndash924 2007
[42] M S Mahmoud ldquoControl of uncertain state-delay systemsguaranteed cost approachrdquo IMA Journal of Mathematical Con-trol and Information vol 18 no 1 pp 109ndash128 2001
[43] D Yue C Peng andG Y Tang ldquoGuaranteed cost control of lin-ear systems over networks with state and input quantisationsrdquoIEE Proceedings Control 13eory and Applications vol 153 no 6pp 658ndash664 2006
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

6 Mathematical Problems in Engineering
Ω12 = 1205721198731119879Ω21 = 1205721198722119879Ω22 = 1205721198732119879
1198721119879 = [11987211119879 11987212119879 11987213119879 11987214119879 11987215119879 11987216119879 11987217119879 11987218119879] 1198722119879 = [11987221119879 11987222119879 11987223119879 11987224119879 11987225119879 11987226119879 11987227119879 11987228119879]
1198731119879 = [11987311119879 11987312119879 11987313119879 11987314119879 11987315119879 11987316119879 11987317119879 11987318119879] 1198732119879 = [11987321119879 11987322119879 11987323119879 11987324119879 11987325119879 11987326119879 11987327119879 11987328119879]
Ξ = (1198807119861Θ01198701198660)119879 + (1198808119861Θ01198701198660)119879 + 1198806119867 minus 11987217119879 minus 11987218119879 + 11987317119879 + 11987318119879Ψ119894 = 119880119894119861Θ01198701198660 + 1198731119894 minus 1198721119894 (119894 = 1 2 3 4 5)
Ψ6 = 1198806119861Θ01198701198660 + (1198806119861Θ01198701198660)119879 minus 11987216 minus 11987216119879 + 11987316 + 11987316119879Ξ1015840 = (1198807119861Θ01198701198660)119879 + (1198808119861Θ01198701198660)119879 + 1198806119867 minus 11987227119879 minus 11987228119879 + 11987327119879 + 11987328119879
Ψ1198941015840 = 119880119894119861Θ01198701198660 + 1198732119894 minus 1198722119894 (119894 = 1 2 3 4 5) Ψ10158406 = 1198806119861Θ01198701198660 + (1198806119861Θ01198701198660) 119879 minus 11987226 minus 11987226119879 + 11987326 + 11987326119879
= [(1198801119863)119879 (1198802119863)119879 (1198803119863)119879 (1198804119863)119879 (1198805119863)119879 (1198806119863)119879 (1198807119863)119879 + (1198808119863)119879 0]119879 = [1198641 0 0 0 0 1198642Θ01198701198660 0 0]
0 = [0 0 0 0 0 119868 0 0]119879 = [119868 0 0 0 0 0 0 0]
Θ = [(1198801119861Θ01198701198660)119879 (1198802119861Θ01198701198660)119879 (1198803119861Θ01198701198660)119879 (1198804119861Θ01198701198660)119879 (1198805119861Θ01198701198660)119879 (1198806119861Θ01198701198660)119879 (11988071198611198701198660)119879 + (11988081198611198701198660)119879 0]119879 Δ = [(1198801119861Θ0)119879 (1198802119861Θ0)119879 (1198803119861Θ0)119879 (1198804119861Θ0)119879 (1198805119861Θ0)119879 (1198806119861Θ0)119879 (1198807119861Θ0)119879 + (1198808119861Θ0)119879 0]119879
= [0 0 0 0 0 1198701198660 0 0] Σ = [0 0 0 0 0 Θ01198701198660 0 0]
(25)
then model (21) is asymptotically stable with the 119867infin normbound 120574 In addition the upper bound 1198690 of cost function 119869 isgiven as
1198690 = 119909119879 (0119905) 119875119909 (0) + 120578119898 int0minus120578119898
int0119904
1199091015840119879 (120591) 11987711199091015840 (120591) 119889119904119889120591+ intminus120578119898minus1205781
int0119904
1199091015840119879 (120591) 11987721199091015840 (120591) 119889119904119889120591+ intminus1205781minus120578119872
int0119904
1199091015840119879 (120591) 11987731199091015840 (120591) 119889119904119889120591
(26)
Proof First with the definition of 120572 = (120578119872 minus 120578119898)2 and 1205781 =120578119898+120572 the interval of delay is distributed into two subintervalsas follows
120578 (119905) isin [120578119898 120578119872] = [120578119898 1205781] cup [1205781 120578119872] (27)
Then we consider the Lyapunov-Krasovskii functional asfollows
V (119905) = 119909119879 (119905) 119875119909 (119905)+ 120578119898 int119905
119905minus120578119898
int119905119904
1199091015840119879 (120591) 11987711199091015840 (120591) 119889119904119889120591+ int119905minus120578119898119905minus1205781
int119905119904
1199091015840119879 (120591) 11987721199091015840 (120591) 119889119904119889120591+ int119905minus1205781119905minus120578119872
int119905119904
1199091015840119879 (120591) 11987731199091015840 (120591) 119889119904119889120591
(28)
where matrix 119875 satisfies 119875 gt 0 and 119877119894 (119894 = 1 2 3)are symmetric positive definite matrices with appropriatedimensions For the convenience of writing we denote 119871 =119871(119905 minus 120578(119905)) and Γ = Γ(119905) in the following expressions
Mathematical Problems in Engineering 7
Calculating the derivative of Lyapunov-Krasovskii functionand based on (21) we have
V1015840 (119905) = 2119909119879 (119905) 1198751199091015840 (119905) + 12057821198981199091015840119879 (119905) 11987711199091015840 (119905)minus 120578119898 int119905
119905minus120578119898
1199091015840119879 (119904) 11987711199091015840 (119904) 119889119904 + (1205781 minus 120578119898) 1199091015840119879 (119905)sdot 11987721199091015840 (119905) minus int119905minus120578119898
119905minus1205781
1199091015840119879 (119904) 11987721199091015840 (119904) 119889119904 + (120578119872 minus 1205781)sdot 1199091015840119879 (119905) 11987731199091015840 (119905) minus int119905minus1205781
119905minus120578119872
1199091015840119879 (119904) 11987731199091015840 (119904) 119889119904+ 2 [120576119879 (119905) 120596119879 (119905)] 119880 [(119860 + Δ119860) 119909 (119905)+ (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) 119909 (119905 minus 120578 (119905))+ 119867120596 (119905) minus 1199091015840 (119905)]
(29)
where V1015840(119905) = lim sup120575997888rarr0+(1120575)[V(119905 + 120575) minus V(119905)] [39]Based on Jessenrsquos inequality we have
minus 120578119898 int119905119905minus120578119898
1199091015840119879 (119904) 11987711199091015840 (119904) 119889119904 le [119909119879 (119905) 119909119879 (119905 minus 120578119898)]sdot [minus1198771 11987711198771 minus1198771] [ 119909 (119905)
119909 (119905 minus 120578119898)](30)
minus int119905minus120578119898119905minus1205781
1199091015840119879 (119904) 11987721199091015840 (119904) 119889119904le 1120572 [119909119879 (119905 minus 120578119898) 119909119879 (119905 minus 1205781)]sdot [minus1198772 11987721198772 minus1198772] [119909 (119905 minus 120578119898)119909 (119905 minus 1205781)]
(31)
minus int119905minus1205781119905minus120578119872
1199091015840119879 (119904) 11987731199091015840 (119904) 119889119904le 1120572 [119909119879 (119905 minus 1205781) 119909119879 (119905 minus 120578119872)]sdot [minus1198773 11987731198773 minus1198773] [ 119909 (119905 minus 1205781)119909 (119905 minus 120578119872)]
(32)
where 120572 = (120578119872 minus 120578119898)2 For the convenience of the followingdiscussion we define
120576119879 (119905) = [119909119879 (119905) 119909119879 (119905 minus 120578119898) 119909119879 (119905 minus 1205781) 119909119879 (119905 minus 120578119872)sdot 1199091015840119879 (119905) 119909119879 (119905 minus 120578 (119905)) 120596119879 (119905)] (33)
Case 1 If 120578(119905) isin [120578119898 1205781] weighted technology based on theprinciple of Newton-Leibniz is introduced as follows
2 [120576119879 (119905) 120596119879 (119905)] 1198721 [119909 (119905 minus 120578119898) minus 119909 (119905 minus 120578 (119905))minus int119905minus120578119898119905minus120578(119905)
1199091015840119879 (119904) 119889119904] = 0(34)
and
2 [120576119879 (119905) 120596119879 (119905)] 1198731 [119909 (119905 minus 120578 (119905)) minus 119909 (119905 minus 1205781)minus int119905minus120578(119905)119905minus1205781
1199091015840119879 (119904) 119889119904] = 0(35)
Because 1198772 gt 0 we haveminus 2 [120576119879 (119905) 120596119879 (119905)] 1198721 int119905minus120578119898
119905minus120578(119905)1199091015840 (119904) 119889119904 le (120578 (119905) minus 120578119898)
sdot [120576119879 (119905) 120596119879 (119905)] 1198721119877minus12 1198721119879 [120576119879 (119905) 120596119879 (119905)]119879+ int119905minus120578119898119905minus120578(119905)
1199091015840119879 (119904) 11987721199091015840 (119904) 119889119904(36)
and
minus 2 [120576119879 (119905) 120596119879 (119905)] 1198731 int119905minus120578(119905)119905minus1205781
1199091015840 (119904) 119889119904 le (1205781 minus 120578 (119905))sdot [120576119879 (119905) 120596119879 (119905)] 1198731119877minus12 1198731119879 [120576119879 (119905) 120596119879 (119905)]119879+ int119905minus120578(119905)119905minus1205781
1199091015840119879 (119904) 11987721199091015840 (119904) 119889119904(37)
Therefore
minus 2 [120576119879 (119905) 120596119879 (119905)] 1198721 int119905minus120578119898119905minus120578(119905)
1199091015840 (119904) 119889119904minus 2 [120576119879 (119905) 120596119879 (119905)] 1198731 int119905minus120578(119905)
119905minus1205781
1199091015840 (119904) 119889119904le (120578 (119905) minus 120578119898)sdot [120576119879 (119905) 120596119879 (119905)] 1198721119877minus12 1198721119879 [120576119879 (119905) 120596119879 (119905)]119879+ (1205781 minus 120578 (119905))sdot [120576119879 (119905) 120596119879 (119905)] 1198731119877minus12 1198731119879 [120576119879 (119905) 120596119879 (119905)]119879+ int119905minus120578119898119905minus1205781
1199091015840119879 (119904) 11987721199091015840 (119904) 119889119904
(38)
In addition 119910119879(119905)119910(119905)minus1205742120596119879(119905)120596(119905) both on the left and rightsides of equality (29) and 119909119879(119905)1198781119909(119905) + [Θ0(119868 + Γ)1198701198660(119868 +119871)119909(119905 minus 120578(119905))]1198791198782Θ0(119868 + Γ)1198701198660(119868 + 119871)119909(119905 minus 120578(119905)) on the rightof the equal sign ldquo=rdquo and then inserting (30) (32) (34) (35)(38) to the obtained inequality we have
V1015840 (119905) + 119910119879 (119905) 119910 (119905) minus 1205742120596119879 (119905) 120596 (119905)le [120576119879 (119905) 120596119879 (119905)] Φ1 [120576119879 (119905) 120596119879 (119905)]119879+ (120578 (119905) minus 120578119898)sdot [120576119879 (119905) 120596119879 (119905)] 1198721119877minus12 1198721119879 [120576119879 (119905) 120596119879 (119905)]119879+ (1205781 minus 120578 (119905))sdot [120576119879 (119905) 120596119879 (119905)] 1198731119877minus12 1198731119879 [120576119879 (119905) 120596119879 (119905)]119879
(39)
where
8 Mathematical Problems in Engineering
Φ1 =
[[[[[[[[[[[[[[[[[[[[
Ξ1 1198771 + [1198802 (119860 + Δ119860)]119879 + 11987211 [1198803 (119860 + Δ119860)]119879 minus 11987311 [1198804 (119860 + Δ119860)]119879lowast minus1198771 + 11987212 + 11987212119879 11987213119879 minus 11987312 11987214119879lowast lowast minus1198773120572 minus 11987312 minus 11987312119879 1198773120572 minus 11987314119879lowast lowast lowast minus1198773120572lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
119875 minus 1198801 + [1198805 (119860 + Δ119860)]119879 Ψ1 + [1198806 (119860 + Δ119860)]119879 [1198807 (119860 + Δ119860)]119879 + [1198808 (119860 + Δ119860)]119879 + 1198801119867 0minus1198802 + 11987215119879 Ψ2 + 11987216119879 1198802119867 + 11987217119879 + 11987218119879 0minus1198803 minus 11987315119879 Ψ3 minus 11987316119879 1198803119867 minus 11987317119879 minus 11987318119879 0
minus1198804 Ψ4 1198804119867 012057811989821198771 + 120572 (1198772 + 1198773) minus 1198805 minus 1198805119879 Ψ5 minus 1198806119879 1198805119867 minus 1198807119879 minus 1198808119879 0
lowast Ψ6 Ξ2 0lowast lowast 1198807119867 + 1198808119867 + (1198807119867)119879 + (1198808119867)119879 0lowast lowast lowast minus1205742119868
]]]]]]]]]]]]]]]]]]]
Ξ1 = minus1198771 + 1198801 (119860 + Δ119860) + [1198801 (119860 + Δ119860)]119879 + 119862119879119862 + 1198781Ξ2 = [1198807 (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 + [1198808 (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 + 1198806119867 minus 11987217119879 minus 11987218119879 + 11987317119879
+ 11987318119879Ψ119894 = 119880119894 (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) + 1198731119894 minus 1198721119894 (119894 = 1 2 3 4 5) Ψ6 = 1198806 (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)
+ [1198806 (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 [Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 1198782Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) minus 11987216 minus 11987216119879 + 11987316+ 11987316119879
(40)
ifΦ1 + (120578 (119905) minus 120578119898) 1198721119877minus12 1198721119879
+ (1205781 minus 120578 (119905)) 1198731119877minus12 1198731119879 lt 0 (41)
Next we need to acquire the inequality (24) through atransformation based on inequality (41) which is equivalentto the following inequalities by applying the theory given inLemma 7 and the Schur complement also used byD Yue [38]in the previous study
[minus (1205781 minus 120578119898)minus1 1198772 1198721119879lowast Φ1 ] lt 0 (42)
[minus (1205781 minus 120578119898)minus1 1198772 1198731119879lowast Φ1 ] lt 0 (43)
Premultiplying and postmultiplying the inequalities above bydiag((1205781 minus 120578119898)119868 119868) we have
[minus1205721198772 Ω1119896lowast Φ1 ] lt 0 (44)
Applying the theory of the Schur complement to inequality(44) we have
[[[[[[[
minus (1198781 + 119862119879119862)minus1 0 0 lowast minus1198782minus1 0 Σlowast lowast minus1205721198772 Ω1119896lowast lowast lowast Φ10158401
]]]]]]]
lt 0 (45)
where
Mathematical Problems in Engineering 9
Φ11015840 =
[[[[[[[[[[[[[[[[[[[[
Ξ11015840 1198771 + [1198802 (119860 + Δ119860)]119879 + 11987211 [1198803 (119860 + Δ119860)]119879 minus 11987311 [1198804 (119860 + Δ119860)]119879lowast minus1198771 + 11987212 + 11987212119879 11987213119879 minus 11987312 11987214119879lowast lowast minus1198773120572 minus 11987312 minus 11987312119879 1198773120572 minus 11987314119879lowast lowast lowast minus1198773120572lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
119875 minus 1198801 + [1198805 (119860 + Δ119860)]119879 Ψ1 + [1198806 (119860 + Δ119860)]119879 [1198807 (119860 + Δ119860)]119879 + [1198808 (119860 + Δ119860)]119879 + 1198801119867 0minus1198802 + 11987215119879 Ψ2 + 11987216119879 1198802119867 + 11987217119879 + 11987218119879 0minus1198803 minus 11987315119879 Ψ3 minus 11987316119879 1198803119867 minus 11987317119879 minus 11987318119879 0minus1198804 Ψ4 1198804119867 0
12057811989821198771 + 120572 (1198772 + 1198773) minus 1198805 minus 1198805119879 Ψ5 minus 1198806119879 1198805119867 minus 1198807119879 minus 1198808119879 0lowast Ψ61015840 Ξ2 0lowast lowast 1198807119867 + 1198808119867 + (1198807119867)119879 + (1198808119867)119879 0lowast lowast lowast minus1205742119868
]]]]]]]]]]]]]]]]
Ξ11015840 = minus1198771 + 1198801 (119860 + Δ119860) + [1198801 (119860 + Δ119860)]119879Ψ61015840 = 1198806 (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) + [1198806 (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 minus 11987216 minus 11987216119879 + 11987316 + 11987316119879
Σ = [0 0 0 0 0 Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) 0 0]
(46)
Inequality (44) can be written as
[[[[[
minus (1198781 + 119862119879119862)minus1 0 0 lowast minus1198782minus1 0 Σlowast lowast minus1205721198772 Ω1119896lowast lowast lowast Φ101584010158401]]]]]
+ [[[[
000119863]]]]
119865 [[[[
000119864119879
]]]]
119879
+ [[[[
000119864119879
]]]]
119865119879[[[[[
000
]]]]]
119879
lt 0(47)
where
Φ110158401015840 =
[[[[[[[[[[[[[[[[[[[[
minus1198771 + 1198801119860 + (1198801119860)119879 1198771 + (1198802119860)119879 + 11987211 (1198803119860)119879 minus 11987311 (1198804119860)119879lowast minus1198771 + 11987212 + 11987212119879 11987213119879 minus 11987312 11987214119879lowast lowast minus1198773120572 minus 11987312 minus 11987312119879 1198773120572 minus 11987314119879lowast lowast lowast minus1198773120572lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
10 Mathematical Problems in Engineering
119875 minus 1198801 + (1198805119860)119879 Ψ110158401015840 + (1198806119860)119879 (1198807119860)119879 + (1198808119860)119879 + 1198801119867 0minus1198802 + 11987215119879 Ψ210158401015840 + 11987216119879 1198802119867 + 11987217119879 + 11987218119879 0minus1198803 minus 11987315119879 Ψ310158401015840 minus 11987316119879 1198803119867 minus 11987317119879 minus 11987318119879 0
minus1198804 Ψ41015840 1198804119867 012057811989821198771 + 120572 (1198772 + 1198773) minus 1198805 minus 1198805119879 Ψ510158401015840 minus 1198806119879 1198805119867 minus 1198807119879 minus 1198808119879 0
lowast Ψ610158401015840 Ξ210158401015840 0lowast lowast 1198807119867 + 1198808119867 + (1198807119867)119879 + (1198808119867)119879 0lowast lowast lowast minus1205742119868
]]]]]]]]]]]]]]]]]]]
Ξ210158401015840 = [1198807119861Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 + [1198808119861Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 + 1198806119867 minus 11987217119879 minus 11987218119879 + 11987317119879 + 11987318119879Ψ11989410158401015840 = 119880119894119861Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) + 1198731119894 minus 1198721119894 (119894 = 1 2 3 4 5)
Ψ61015840 = 1198806119861Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) + [1198806119861Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 minus 11987216 minus 11987216119879 + 11987316 + 11987316119879 = [1198641 0 0 0 0 1198642Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) 0 0]
(48)
With the definition of scalar 120576 gt 0 we apply the theory givenin Lemma 6 to (47) also used by Y Wang and L Xie [37]in which the uncertain matrix 119865 can be eliminated and asufficient condition of (47) is obtained
[[[[[[[
minus (1198781 + 119862119879119862)minus1 0 0 lowast minus1198782minus1 0 Σlowast lowast minus1205721198772 Ω1119896lowast lowast lowast Φ101584010158401
]]]]]]]
+ 120576 [[[[[[
01198630
]]]]]]
[[[[[[
01198630
]]]]]]
119879
+ 120576minus1[[[[[[[
000
119879
]]]]]]]
[[[[[[[
000
119879
]]]]]]]
119879
lt 0
(49)
Applying the Schur complement to inequality (49) we have
[[[[[[[[[[[[[[
minus120576119868 0 0 0 120576119879 0lowast minus (1198781 + 119862119879119862)minus1 0 0 0lowast lowast minus1198782minus1 0 Σ 0lowast lowast lowast minus1205721198772 Ω1119896 0lowast lowast lowast lowast Φ101584010158401 119879lowast lowast lowast lowast lowast minus120576119868
]]]]]]]]]]]]]]
lt 0
(50)
There exists 1205881 gt 0 1205882 gt 0 Based on (17) and Remark 3 inSection 2 we know that 119871119879119871 le 119868 and Γ119879Γ le 119868 According
to expressions (47) (49) and (50) we obviously know that1198805 gt 0 Using Lemma 6 again we have
Θ0 (119868 + Γ) 1198701198660119871 + [Θ0 (119868 + Γ) 1198701198660119871]119879le 1205881minus1Θ0 (119868 + Γ) 11987011986601198805minus1 [Θ0 (119868 + Γ) 1198701198660]119879
+ 12058811198805(51)
and
Θ0Γ1198701198660 + (Θ0Γ1198701198660)119879le 1205882minus1Θ0Θ0119879 + 1205882 (1198701198660)1198791198701198660
(52)
Based on inequalities (51) (52) and the Schur complementwe know inequality (24) is a sufficient condition of inequality(50) while inequality (50) is equivalent to inequality (41)Therefore we can undoubtedly obtain inequality (24) asa sufficient condition of inequality (41) Thus based oninequality (39) and (41) we know(1) if120596(119905) equiv 0 obviously we have V1015840(119905) lt 0 so system (21)is asymptotically stable(2) if 119909(0) equiv 0 we know V(0) = 0 In addition it can beobtained that V(infin) ge 0
Therefore
intinfin0
V1015840 (119905) + 119910119879 (119905) 119910 (119905) minus 1205742120596119879 (119905) 120596 (119905) 119889119905= V (infin) + intinfin
0119910119879 (119905) 119910 (119905) minus 1205742120596119879 (119905) 120596 (119905) 119889119905 lt 0
(53)
Thus
intinfin0
119910119879 (119905) 119910 (119905) lt intinfin0
1205742120596119879 (119905) 120596 (119905) 119889119905 (54)
Mathematical Problems in Engineering 11
Because 120596(119905) isin 1198712[0 infin) we have1003817100381710038171003817119910 (119905)1003817100381710038171003817 le 120574 120596 (119905)119879 (55)
It is known that model (21) is asymptotically stable with the119867infin norm bound 120574Moreover according to (39) and (41) we have
V1015840 (119905) le minus119909119879 (119905) 1198781119909 (119905)minus [Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) 119909 (119905 minus 120578 (119905))]119879
sdot 1198782Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) 119909 (119905 minus 120578 (119905))(56)
Through the integral operation it can be determined that119869 le V(0) In addition by inserting 119905 = 0 into the Lyapunov-Krasovskii function shown as expression (28) the upperbound of cost function 119869 can be obtained and shown asexpression (26) Therefore the theorem is verified if 119897 = 1Case 2 If 120578(119905) isin [1205781 120578119872] weighted technology based on theprinciple of Newton-Leibniz is introduced as follows
2 [120576119879 (119905) 120596119879 (119905)] 1198722 [119909 (119905 minus 1205781) minus 119909 (119905 minus 120578 (119905))minus int119905minus1205781119905minus120578(119905)
1199091015840119879 (119904) 119889119904] = 0(57)
2 [120576119879 (119905) 120596119879 (119905)] 1198732 [119909 (119905 minus 120578 (119905)) minus 119909 (119905 minus 120578119872)minus int119905minus120578(119905)119905minus120578119872
1199091015840119879 (119904) 119889119904] = 0(58)
Because 1198773 gt 0 we have
minus 2 [120576119879 (119905) 120596119879 (119905)] 1198722 int119905minus1205781119905minus120578(119905)
1199091015840 (119904) 119889119904 le (120578 (119905) minus 1205781)sdot [120576119879 (119905) 120596119879 (119905)] 1198722119877minus13 1198722119879 [120576119879 (119905) 120596119879 (119905)]119879+ int119905minus1205781119905minus120578(119905)
1199091015840119879 (119904) 11987731199091015840 (119904) 119889119904(59)
minus 2 [120576119879 (119905) 120596119879 (119905)] 1198732 int119905minus120578(119905)119905minus120578119872
1199091015840 (119904) 119889119904 le (120578119872 minus 120578 (119905))sdot [120576119879 (119905) 120596119879 (119905)] 1198732119877minus13 1198731119879 [120576119879 (119905) 120596119879 (119905)]119879+ int119905minus120578(119905)119905minus120578119872
1199091015840119879 (119904) 11987731199091015840 (119904) 119889119904(60)
Therefore
minus 2 [120576119879 (119905) 120596119879 (119905)] 1198722 int119905minus1205781119905minus120578(119905)
1199091015840 (119904) 119889119904
minus 2 [120576119879 (119905) 120596119879 (119905)] 1198732 int119905minus120578(119905)119905minus120578119872
1199091015840 (119904) 119889119904le (120578 (119905) minus 1205781)sdot [120576119879 (119905) 120596119879 (119905)] 1198722119877minus13 1198722119879 [120576119879 (119905) 120596119879 (119905)]119879+ (120578119872 minus 120578 (119905))sdot [120576119879 (119905) 120596119879 (119905)] 1198732119877minus13 1198732119879 [120576119879 (119905) 120596119879 (119905)]119879
+ int119905minus1205781119905minus120578119872
1199091015840119879 (119904) 11987731199091015840 (119904) 119889119904
(61)
In addition 119910119879(119905)119910(119905)minus1205742120596119879(119905)120596(119905) both on the left and rightsides of equality (29) and 119909119879(119905)1198781119909(119905) + [Θ0(119868 + Γ)1198701198660(119868 +119871)119909(119905minus120578(119905))]1198791198782Θ0(119868+Γ)1198701198660(119868+119871)119909(119905minus120578(119905)) on the right sideof equal sign ldquo=rdquo By inserting (30) (31) (57) (58) and (61)into the obtained inequality the item minus int119905minus1205781
119905minus1205781198721199091015840119879(119904)11987731199091015840(119904)119889119904
can be offset while the item minus int119905minus120578119898119905minus1205781
1199091015840119879(119904)11987721199091015840(119904)119889119904 is offsetin Case 1 Then in the same methods of transformation asCase 1 the inequality (24) when 119897 = 2 can be obtainedTherefore the proof is complete
Remark 9 In the two different cases a variational weightingmatrix and Jessenrsquos inequalities are used to derive the 119867infinguaranteed cost fault-tolerant condition of the system inwhich more delay information is employed to reduce theconservatism
The next section will provide sufficient conditions fordesigning the guaranteed cost fault-tolerant control for adouble-fault NCS
4 Guaranteed Cost Fault-Tolerant Control ofDouble-Fault NCS
Inequality (24) is not linear with respect to the gain matricesof the controller so it is needs to be reformulated into LMIsvia a change of variables
Theorem 10 Given symmetric positive definite matrices 1198781and 1198782 a set of constant 120578119898 120578119872 1205881 gt 0 1205882 gt 0 120582119894 (119894 = from1 to 7) and 120572 = (120578119872 minus 120578119898)2 If there exists a set of symmetricpositive definite matrices 119895 (119895 = 1 2 3)119883 andmatrix gt 0as well as matrices 1120573 2120573 1120573 2120573 (120573 =from 1 to 8)
12 Mathematical Problems in Engineering
119884 and a set of constants 120576 gt 0 and 120583 gt 0 satisfying theLMIs
[[[[[[[[[[[[[[[[[[[[[[[[[[
minus120576119868 0 0 0 120576119863119879lowast minus (1198781 + 119862119879119862)minus1 0 0 Πlowast lowast minus1198782minus1 0 Σlowast lowast lowast minusΓ119897 Ω119897119896lowast lowast lowast lowast Φ119897lowast lowast lowast lowast lowastlowast lowast lowast lowast lowastlowast lowast lowast lowast lowastlowast lowast lowast lowast lowastlowast lowast lowast lowast lowast
0 0 0 0 00 0 0 0 00 Θ0119884 0 Θ0 00 0 0 0 0
119864119879 Θ 119883 Δ 119884119879minus120576119868 1198642Θ0119884 0 1198642Θ0 0lowast minus1205881119883119879 0 0 119884119879lowast lowast minus1205881minus1119883 0 0lowast lowast lowast minus1205882119868 0lowast lowast lowast lowast minus1205882minus1119868
]]]]]]]]]]]]]]]]]]]]]]
lt 0
119897 = 1 2 119896 = 1 2(62)
where
Φ1 =
[[[[[[[[[[[[[[[[[[[[[
minus1 + 1205821119860119883119879 + 1205821119883119860119879 1 + 1205822119883119860119879 + 11 1205823119883119860119879 minus 11 1205824119883119860119879lowast minus1 + 12 + 12119879 13119879 minus 12 14119879lowast lowast minus3120572 minus 12 minus 12119879 3120572 minus 14119879lowast lowast lowast minus3120572lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
minus 1205821119883119879 + 119883119860119879 Ψ1 + 1205825119883119860119879 1205826119883119860119879 + 1205827119883119860119879 + 1205821119867119883119879 0minus1205822119883119879 + 15119879 Ψ2 + 16119879 1205822119867119883119879 + 17119879 + 18119879 0minus1205823119883119879 minus 15119879 Ψ3 minus 16119879 1205823119867119883119879 minus 17119879 minus 18119879 0
minus1205824119883119879 Ψ4 1205824119867119883119879 012057811989821 + 120572 (2 + 3) minus 119883119879 minus 119883 Ψ5 minus 1205825119883 119867119883119879 minus 1205826119883 minus 1205827119883 0
lowast Ψ6 Ξ 0lowast lowast 1205826119867119883119879 + 1205827119867119883119879 + 1205826119883119867119879 + 1205827119883119867119879 0lowast lowast lowast minus120583119868
]]]]]]]]]]]]]]]]]
Φ2 =
[[[[[[[[[[[[[[[[[[[[[
minus1 + 1205821119860119883119879 + 1205821119883119860119879 1 + 1205822119883119860119879 1205823119883119860119879 + 21 1205824119883119860119879 minus 21lowast minus1 minus 2120572 2120572 + 22 minus22lowast lowast minus2120572 + 23 + 23119879 24119879 minus 23lowast lowast lowast minus24 minus 24119879lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
Mathematical Problems in Engineering 13
minus 1205821119883119879 + 119883119860119879 Ψ11015840 + 1205825119883119860119879 1205826119883119860119879 + 1205827119883119860119879 + 1205821119867119883119879 0minus1205822119883119879 Ψ21015840 1205822119867119883119879 0
minus1205823119883119879 + 25119879 Ψ31015840 + 26119879 1205823119867119883119879 + 27119879 + 28119879 0minus1205824119883119879 minus 25119879 Ψ41015840 minus 26119879 1205824119867119883119879 minus 27119879 minus 28119879 0
12057811989821 + 120572 (2 + 3) minus 119883 minus 119883119879 Ψ51015840 minus 1205825119883 119867119883119879 minus 1205826119883 minus 1205827119883 0lowast Ψ61015840 Ξ1015840 0lowast lowast 1205826119867119883119879 + 1205827119867119883119879 + 1205826119883119867119879 + 1205827119883119867119879 0lowast lowast lowast minus120583119868
]]]]]]]]]]]]]]]]]]]]]
Γ1 = 1205721198772Γ1 = 1205722Γ2 = 1205723
Ω11 = 1205721119879Ω12 = 1205721119879Ω21 = 1205722119879Ω22 = 1205722119879
1119879 = [11119879 12119879 13119879 14119879 15119879 16119879 17119879 18119879] 2119879 = [21119879 22119879 23119879 24119879 25119879 26119879 27119879 28119879]
1119879 = [11119879 12119879 13119879 14119879 15119879 16119879 17119879 18119879] 1198732119879 = [21119879 22119879 23119879 24119879 25119879 26119879 27119879 28119879]
Ξ = 1205826 (119861Θ0119884)119879 + 1205827 (119861Θ0119884)119879 + 1205825119867119883119879 minus 17119879 minus 18119879 + 17119879 + 18119879Ψ119894 = 120582119894119861Θ0119884 + 1119894 minus 1119894 (119894 = 1 2 3 4)
Ψ5 = 119861Θ0119884 + 1119894 minus 1119894Ψ6 = 1205825119861Θ0119884 + 1205825 (119861Θ0119884)119879 minus 11987216 minus 11987216119879 + 11987316 + 11987316119879
Ξ1015840 = 1205826 (119861Θ0119884)119879 + 1205827 (119861Θ0119884)119879 + 1205825119867119883119879 minus 27119879 minus 28119879 + 27119879 + 28119879Ψ1198941015840 = 120582119894119861Θ0119884 + 2119894 minus 2119894 (119894 = 1 2 3 4)
Ψ51015840 = 119861Θ0119884 + 2119894 minus 2119894Ψ61015840 = 1205825119861Θ0119884 + 1205825 (119861Θ0119884)119879 minus 26 minus 26119879 + 26 + 26119879
119863 = [1205821119863119879 1205822119863119879 1205823119863119879 1205824119863119879 119863119879 1205825119863119879 1205826119863119879 + 1205827119863119879 0]119879 119864 = [1198641119883119879 0 0 0 0 1198642Θ0119884 0 0]
119883 = [0 0 0 0 0 119883119879 0 0]119879 Π = [119883119879 0 0 0 0 0 0 0]
14 Mathematical Problems in Engineering
Θ = [(1205821119861Θ0119884)119879 (1205822119861Θ0119884)119879 (1205823119861Θ0119884)119879 (1205824119861Θ0119884)119879 (119861Θ0119884)119879 (1205825119861Θ0119884)119879 (1205826119861119884)119879 + (1205827119861119884)119879 0]119879 Δ = [(1205821119861Θ0)119879 (1205822119861Θ0)119879 (1205823119861Θ0)119879 (1205824119861Θ0)119879 (119861Θ0)119879 (1205825119861Θ0)119879 (1205826119861Θ0)119879 + (1205827119861Θ0)119879 0]119879
119884 = [0 0 0 0 0 119884 0 0] Σ = [0 0 0 0 0 Θ0119884 0 0]
(63)
then the 119867infin guaranteed cost control gain 119870 = 119884119883minus1198791198660minus1 canrendermodel (21) to be asymptotically stable with the119867infin normbound 120574 = radic120583 13e upper bound 1198690 of cost function 119869 is givenas
1198690 = 119909119879 (0) 119883minus1119883minus119879119909 (0)+ 120578119898 int0
minus120578119898
int0119904
1199091015840119879 (120591) 119883minus11119883minus1198791199091015840 (120591) 119889119904119889120591+ intminus120578119898minus1205781
int0119904
1199091015840119879 (120591) 119883minus12119883minus1198791199091015840 (120591) 119889119904119889120591+ intminus1205781minus120578119872
int0119904
1199091015840119879 (120591) 119883minus13119883minus1198791199091015840 (120591) 119889119904119889120591
(64)
Proof The proof is based on a suitable transformation anda change of variables allowing us to obtain inequality (24)in Theorem 8 First we define 1198805 = 1198800 119880119894 = 1205821198941198800 (119894 =from 1 to 4) 1198806 = 12058251198800 in (24) Because we consider thedimension of state119909is equal to that of outside disturbance120596 in this paper we can also define 1198807 = 12058261198800 1198808 =12058271198800 Obviously (24) implies 1198805 gt 0 so 1198800 is nonsingularThen using the analysis method of D Yue [40] and Z Wang[41] pre- and postmultiplying both sides of inequality (24)with diag(119868 119868 119868 119883 119868 119883 119868 119868 119868) and its transpose where = diag(119883 119883 119883 119883 119883 119883 119883 119883) and 119883 = 1198800minus1 introducingnew variables 119883119875119883119879 = 119883119877119895119883119879 = 119895 (119895 = 1 2 3)119883119872119897120573119883119879 = 119897120573 119883119873119897120573119883119879 = 119897120573 (119897 = 1 2 120573 = 1 2 sdot sdot sdot 8)1198701198660119883119879 = 119884 and 120583 = 1205742 From the definition of 1198660 we know1198660 is invertible so 119870 can be obtained by calculating 119870 =119884119883minus1198791198660minus1 It is easy to see that 10 and (64) respectively imply(24) and (26) Therefore from Theorem 8 we can completethe proof
To obtain the optimal bound 119869lowast shown in (26) thecommonly used method is to consider it as an optimizationproblem like [42] in which the expression of initial state 119909(119905)(119905 isin [minus120578119872 0]) needs to be known The expression of initialstate is not given in this paper Therefore the optimizationmethod used in [42] cannot be used here A practical methodto obtain 119869lowast also used by D Yue [43] is employed as follows
Suppose 1199091015840(119905) is bounded if 119905 isin [minus120578119872 0] and satisfying1199091015840119879(120591)1199091015840(120591) le ℓ In addition suppose that there exists 120573119894 gt0 (119894 = 1 2 3) satisfying119883minus1119894119883minus119879 le 120573119894119868 119894 = 1 2 3119883minus1119883minus119879 le 1205734119868 (65)
Inserting this into (64) we have
1198690 le 1205734119909119879 (0) 119909 (0) + 05ℓ12057311205781198983 + 05ℓ1205732 (12057812 minus 1205781198982)+ 05ℓ1205733 (1205781198722 minus 12057812) = 119869lowast (66)
Applying the Schur complement to the inequalities above wehave
[minus120573119894119868 119883minus1lowast minus119877119894minus1] lt 0 119894 = 1 2 3
[minus1205734119868 119883minus1lowast minus119875minus1] lt 0
(67)
Then combining 10 and (67) 119894minus1 119894 (119894 = 1 2 3)minus1 119883minus1 119883 exist simultaneously We cannot directly usethe LMI tools to solve the problem Defining 119894minus1 = 119894(119894 = 1 2 3) minus1 = 119883minus1 = and using the idea of thecone complementary linearization algorithm the guaranteedcost fault-tolerant controller of system (21) and the value ofoptimal performance indicator 119869lowast can be obtained in thefollowing method
Minimize 119905119903119886119888119890 (11 + 22 + 33 + + )+ 1205734 + 0512057311205781198983 + 051205732 (12057812 minus 1205781198982)+ 051205733 (1205781198722 minus 12057812)
Subject to 119868119899119890119902119906119886119897119894119905119894119890119904 (62) [minus120573119894119868
lowast minus119894] lt 0 (119894 = 1 2 3)
[minus1205734119868 lowast minus] lt 0
[119883 119868lowast ] ge 0
[1 119868lowast 1] ge 0
[2 119868lowast 2] ge 0
Mathematical Problems in Engineering 15
[3 119868lowast 3] ge 0
[ 119868lowast ] ge 0
119894 gt 0 (119894 = 1 2 3) (68)
5 Simulations
Example 11 Consider inverted pendulum model that canusually be modelled as (1) and the system parameters aregiven as follows
119860 = [minus2 1110 4 ]
119861 = [01minus4]
119862 = [minus03151 01011 03]
119867 = [015 minus056minus01 032 ]
Δ119860 = [004 sin 119905 015 sin 119905minus02 sin 119905 075 sin 119905]
Δ119861 = [002 sin 119905minus01 sin 119905]
119863 = [ 01minus05]
119865 (119905) = sin 119905
(69)
Therefore we have
1198641 = [04 15] 1198642 = 02 (70)
For this simulation the initial state of system is assumed119909(0) = [2 minus1]119879 and the external disturbance is considered as120596(119905) = [015 minus05]119879 3119904 le 119905 le 4119904
0 119900119905ℎ119890119903119904 Here we take the upper
bound of time-varying delay as 120578119872 = 03119904 and its lower boundas 120578119898 = 0119904 namely 0 le 120578(119905) le 03 In addition the faultbounds of the system are given in Table 1
Table 1 The bounds of faults
Symbol Upper bound Lower boundActuatorfaultsΘ 136 009
SensorFaults119866
[[
165 00 175]
][[
0 00 015]
]
minus01
0
01
02
03
04
05
Del
ay
1 2 3 4 5 60Time s
Figure 2 The time-varying delay in double-fault NCS
We choose the parameters as follows
1205821 = 011205822 = 0151205823 = minus0641205824 = 031205825 = 1205826 = 0351205827 = 181198782 = 0311205881 = 30001205882 = 22032ℓ = 1
1198781 = [10013 00 9207]
(71)
By taking advantage of the LMI tool box and inserting theabove parameters into inequalities 10 and (68) we can obtainthe 119867infin guaranteed cost control gain
119870 = 119884119883minus1198791198660minus1 = [85163 151398] (72)
with 120574 = radic120583 = 1952516The corresponding optimal performance indicator (the
upper bound value of guaranteed cost function) is 119869lowast =83162563The time-varying delay is shown in Figure 2 In Figure 3
(a) is the actuator fault which is a piecewise-linear function
16 Mathematical Problems in Engineering
002040608
1121416
Actu
ator
faul
t
1 2 3 4 5 60Time s
(a) Time-varying actuator fault
minus020
02040608
112141618
Sens
or fa
ult
1 2 3 4 5 60Time s
(b) Time-varying sensor fault
Figure 3 The time-varying faults
x1
x2
1 2 3 4 5 60Time s
minus15
minus1
minus05
0
05
1
15
2
Stat
e X
Figure 4 The state response curve of double-fault NCS
1 2 3 4 5 60Time s
minus8minus7minus6minus5minus4minus3minus2minus1
012
Con
trol i
nput
Figure 5 The control input of double-fault NCS
It keeps the minimum value from 13119904 to 17119904 while it keepsthe maximum value from 37119904 to 43119904 The sensor faults areshown as (b) which is sinusoidal It should be noted thatthe green dotted line represents the fault of sensor 1 whilethe blue solid line represents the fault of sensor 2 Throughthe state response of the double-fault NCS shown in Figure 4and corresponding control signal shown in Figure 5 we know
x1
x2
1 2 3 4 5 60Time s
minus8
minus6
minus4
minus2
0
2
4
6
Stat
e X
Figure 6 The state response curve of double-fault NCS
the 119867infin guaranteed cost controller designed in this paper isable to make the double-fault NCS asymptotically stable Thesystem gets preliminarily steady at 2119904 and its state can returnto the equilibrium position in a certain period of time whenthe NCS is affected by external disturbance Compared withthe state response of worse stability shown in Figure 6 whenthe method proposed in [28] is used for this double-faultproblem it sufficiently proves the effectiveness and feasibilityof the method proposed in this paper
To better illustrate the effectiveness of the method pro-posed in this paper the following example is presented
Example 12 Consider the parameters of system (1) as follows
119860 = [[[[[[
021 0 035 10 minus53 minus586 323
365 minus11 minus156 minus0890 0 minus158 minus285
]]]]]]
119861 = [559 12 minus089 13]119879 119862 = [17 02 015 minus018]
Mathematical Problems in Engineering 17
minus15
minus1
minus05
0
05
1
15
Stat
e X1 2 3 4 5 6 7 8 9 100
Time s
R1R2
R3R4
Figure 7 The state response curve of double-fault NCS
Δ119860 = [[[[
082 sin 119905 0 0 00 012 sin 119905 0 00 0 minus058 sin 119905 00 0 0 101 sin 119905]]]]
Δ119861 = [[[[
minus015 sin 119905008 sin 1199050minus028 sin 119905]]]]
119867 = [[[[
minus041 096 052 0006 minus057 0 021121 0 059 0minus032 minus011 minus035 minus003]]]]
119863 = 1198684times4119865 (119905) = diag (sin 119905 sin 119905 sin 119905 sin 119905)
(73)
Therefore we have
1198641 = diag (082 012 minus058 101) 1198642 = [minus015 008 0 minus028]119879 (74)
For this simulation the initial state of system is assumedas 119909(0) = [121 minus051 023 minus018]119879 and the externaldisturbance is considered as
120596 (119905) = [015 cos 119905 015 cos 119905 minus012 sin 119905 minus025 cos 119905]119879 6119904 le 119905 le 81199040 119900119905ℎ119890119903119904 (75)
The uncertain time-varying delay satisfies 0 le 120578(119905) le023119904 In addition the fault bounds of the system are givenin Table 2 Other parameters are selected as follows
1205821 = 121205822 = minus2031205823 = 1681205824 = minus231205825 = minus1051205826 = 6051205827 = 5121198781 = diag (19888 15634 8709 12876) 1198782 = 586
1205881 = 57981205882 = 1879ℓ = 1
(76)
By taking advantage of the LMI tool box and submittingthese parameters above into inequalities 10 and (68) we canobtain the 119867infin guaranteed cost control gain
119870 = 119884119883minus1198791198660minus1= [minus17256 15512 minus08571 07451]
with 120574 = radic120583 = 5819806(77)
The corresponding optimal performance indicator is 119869lowast =65021047 From the state response shown in Figure 7 andcontrol signal shown in Figure 8 we undoubtedly know
18 Mathematical Problems in Engineering
Table 2 The bounds of faults
Symbol Upper bound Lower boundActuatorfaultsΘ 150 012
SensorFaults119866
[[[[[[[[
185 0 0 00 160 0 00 0 125 00 0 0 165
]]]]]]]]
[[[[[[[[
025 0 0 00 0 0 00 0 0 00 0 0 015
]]]]]]]]
minus4
minus3
minus2
minus1
0
1
2
Con
trol i
nput
1 2 3 4 5 6 7 8 9 100Time s
Figure 8 The control input of double-fault NCS
the double-fault NCS is asymptotically stable when the 119867infinguaranteed cost controller is used This further demonstratesthe feasibility and effectiveness of the method proposed inthis paper
6 Conclusions
The issues of modelling and 119867infin guaranteed cost fault-tolerant control of double-fault networked control systemshave been addressedThe closed-loopmodel of a double-faultNCS is set up with regard to the influences of transmissiondelay packet dropout uncertain parameters and externaldisturbance In addition the piecewise delay method is pro-posed to reduce the conservatism when analysing the delay-dependent faulty system With the help of Lee Y Srsquos lemmathe sufficient condition of guaranteed cost fault-tolerantfor time-varying double-fault NCS is introduced using theLyapunov-Krasovskii theory and weighted technology Themethod of designing a guaranteed cost fault-tolerant con-troller for this NCS is given based on LMI Our next researchtask will be choosing more reasonable values of parameters120582119894 (119894 = 1 2 3 4 5 6 7) to reduce the conservatism further Ofcourse the study on scheduling policy of double-fault NCS isalso a challenge but indispensable work
Data Availability
The data used in this paper can be got by simulations
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was partly supported by National Nature Sci-ence Foundation of China under Grants 51875380 51375323and 61563022 Cooperative Innovation Fund-Prospective ofJiangsu Province under Grant BY2016044-01Major Programof Natural Science Foundation of Jiangxi Province Chinaunder Grant 20152ACB20009 High Level Talents of ldquoSix Tal-ent Peaksrdquo in Jiangsu Province China under Grant DZXX-046
References
[1] H Zhang Y Shi J Wang and H Chen ldquoA New Delay-compensation Scheme for Networked Control Systems inController Area Networksrdquo IEEE Transactions on IndustrialElectronics vol 65 no 9 pp 7239ndash7247 2018
[2] A Da Silva and C Kawan ldquoRobustness of critical bit rates forpractical stabilization of networked control systemsrdquo Automat-ica vol 93 pp 397ndash406 2018
[3] Q Zhu K Lu and Y Zhu ldquoGuaranteed cost control ofnetworked control systems under transmission control protocolwith active queue managementrdquo Asian Journal of Control vol18 no 4 pp 1546ndash1557 2016
[4] Q Zhu K Lu and Y Zhu ldquoHinfin Guaranteed Cost Control forNetworked Control Systems under Scheduling Policy Based onPredicted Errorrdquo Mathematical Problems in Engineering vol2014 Article ID 586029 12 pages 2014
[5] W H Chen J X Xu and Z H Guan ldquoGuaranteed cost controlfor uncertain Markovian jump systems with mode-dependenttime-delaysrdquo IEEE Transactions on Automatic Control vol 48no 12 pp 2270ndash2277 2003
[6] HM Soliman A DabroumM S Mahmoud andM SolimanldquoGuaranteed-cost reliable control with regional pole placementof a power systemrdquo Journal of 13e Franklin Institute vol 348no 5 pp 884ndash898 2011
[7] X Li and X-B Wu ldquoGuaranteed cost fault-tolerant controllerdesign of networked control systems under variable-periodsamplingrdquo Information Technology Journal vol 8 no 4 pp 537ndash543 2009
[8] L Zhang and G Orosz ldquoMotif-Based Design for ConnectedVehicle Systems in Presence of Heterogeneous ConnectivityStructures and Time Delaysrdquo IEEE Transactions on IntelligentTransportation Systems vol 17 no 6 pp 1638ndash1651 2016
[9] Z Li G Guo and Z Liu ldquoCommunication parameter designfor networked control systems with the slotted ALOHA accessprotocolrdquo Information Sciences vol 447 pp 205ndash215 2018
[10] K Lu G Jing and L Wang ldquoDistributed algorithm for solv-ing convex inequalitiesrdquo Institute of Electrical and ElectronicsEngineers Transactions on Automatic Control vol 63 no 8 pp2670ndash2677 2018
[11] Q Zhu K Lu and Y Zhu ldquoObserver-based feedback controlof networked control systems with delays and packet dropoutsrdquoJournal of Dynamic SystemsMeasurement andControl vol 138no 2 pp 1ndash8 2016
Mathematical Problems in Engineering 19
[12] Y Li H Li and W Sun ldquoEvent-triggered control for robust setstabilization of logical control networksrdquo Automatica vol 95pp 556ndash560 2018
[13] X Luan P Shi and F Liu ldquoStabilization of networked controlsystems with random delaysrdquo IEEE Transactions on IndustrialElectronics vol 58 no 9 pp 4323ndash4330 2011
[14] Y Zhang and J Jiang ldquoBibliographical review on reconfigurablefault-tolerant control systemsrdquo Annual Reviews in Control vol32 no 2 pp 229ndash252 2008
[15] N H Ei-Farra A Gani and P D Christofides ldquoFault-tolerantcontrol of process systems using communication networksrdquoAIChE Journal vol 51 no 6 pp 1665ndash1682 2005
[16] H R Karimi and H Gao ldquoNew delay-dependent exponentialHinfin synchronization for uncertain neural networks withmixedtime delaysrdquo IEEE Transactions on Systems Man and Cybernet-ics Part B Cybernetics vol 40 no 1 pp 173ndash185 2010
[17] Y N Guo Q Y Zhang D W Gong and J H Zhang ldquoRobustfault-tolerant control of networked control systems with time-varying delaysrdquoControl andDecision vol 23 no 6 pp 689ndash6922008
[18] Z Mao and B Jiang ldquoFault identification and fault-tolerantcontrol for a class of networked control systemsrdquo InternationalJournal of Innovative Computing Information and Control vol3 no 5 pp 1121ndash1130 2007
[19] C-X Yang Z-H Guan and J Huang ldquoStochastic fault tolerantcontrol of networked control systemsrdquo Journal of 13e FranklinInstitute vol 346 no 10 pp 1006ndash1020 2009
[20] Z Mao Y Pan B Jiang and W Chen ldquoFault Detectionfor a Class of Nonlinear Networked Control Systems withCommunication Constraintsrdquo International Journal of ControlAutomation and Systems vol 16 no 1 pp 256ndash264 2018
[21] A Qiu J Gu C Wen and J Zhang ldquoSelf-triggered faultestimation and fault tolerant control for networked controlsystemsrdquo Neurocomputing vol 272 no 1 pp 629ndash637 2018
[22] Q Zhu K Lu G Xie and Y Zhu ldquoGuaranteed Cost Fault-Tolerant Control for Networked Control Systems with SensorFaultsrdquoMathematical Problems in Engineering vol 2015 ArticleID 549347 9 pages 2015
[23] W Wu and Y Zhang ldquoEvent-triggered fault-tolerant controland scheduling codesign for nonlinear networked control sys-tems with medium-access constraint and packet disorderingrdquoInternational Journal of Robust and Nonlinear Control vol 28no 4 pp 1182ndash1198 2018
[24] X Xiao and X-J Li ldquoAdaptive dynamic programming method-based synchronisation control of a class of complex dynamicalnetworks with unknown dynamics and actuator faultsrdquo IETControl 13eory amp Applications vol 12 no 2 pp 291ndash298 2018
[25] PMhaskar AGani CMcFall PDChristofides and J FDavisldquoFault-tolerant control of nonlinear process systems subject tosensor faultsrdquo AIChE Journal vol 53 no 3 pp 654ndash668 2007
[26] M Liu P Shi L Zhang and X Zhao ldquoFault-tolerant controlfor nonlinear Markovian jump systems via proportional andderivative sliding mode observer techniquerdquo IEEE Transactionson Circuits and Systems I Regular Papers vol 58 no 11 pp2755ndash2764 2011
[27] S Li D Sauter C Aubrun and J Yame ldquoStability guaranteedactive fault-tolerant control of networked control systemsrdquoJournal of Control Science and Engineering vol 2008 Article ID189064 9 pages 2008
[28] X Y Luo M J Shang C L Chen and X P Guan ldquoGuaranteedcost active fault-tolerant control of networked control system
with packet dropout and transmission delayrdquo InternationalJournal of Automation and Computing vol 7 no 4 pp 509ndash5152010
[29] Q Zhu B Xie and Y Zhu ldquoGuaranteed Cost Control forMultirate Networked Control Systems with Both Time-Delayand Packet-Dropoutrdquo Mathematical Problems in Engineeringvol 2014 Article ID 637329 9 pages 2014
[30] R Manivannan R Samidurai J Cao and M Perc ldquoDesign ofResilient Reliable Dissipativity Control for Systems with Actu-ator Faults and Probabilistic Time-Delay Signals via Sampled-Data Approachrdquo IEEE Transactions on Systems Man andCybernetics Systems 2018
[31] R Manivannan R Samidurai J Cao A Alsaedi and F EAlsaadi ldquoNon-Fragile Extended Dissipativity Control Designfor Generalized Neural Networks with Interval Time-DelaySignalsrdquo Asian Journal of Control 2019
[32] Q Gao and N Olgac ldquoBounds of imaginary spectra of LTIsystems in the domain of two of the multiple time delaysrdquoAutomatica vol 72 pp 235ndash241 2016
[33] Q Gao A S Kammer U Zalluhoglu and N Olgac ldquoCriticaleffects of the polarity change in delayed states within anLTI dynamics with multiple delaysrdquo Institute of Electrical andElectronics Engineers Transactions onAutomatic Control vol 60no 11 pp 3018ndash3022 2015
[34] Q Gao Z Zhang and C Yang ldquoSign inverting control andits important properties for multiple time-delayed systemsrdquo inProceedings of the 10th ASME Dynamic Systems and ControlConference pp 979ndash984 Virginia USA 2017
[35] Y M Zhang and J Jiang ldquoActive fault-tolerant control systemagainst partial actuator failuresrdquo IEE Proceedings Control13eoryand Applications vol 149 no 1 pp 95ndash104 2002
[36] G Garcia J Bernussou andD Arzelier ldquoRobust stabilization ofdiscrete-time linear systems with norm-bounded time-varyinguncertaintyrdquo Systems amp Control Letters vol 22 no 5 pp 327ndash339 1994
[37] Y Wang L Xie and C E de Souza ldquoRobust control of a classof uncertain nonlinear systemsrdquo Systems amp Control Letters vol19 no 2 pp 139ndash149 1992
[38] D Yue E Tian and Y Zhang ldquoA piecewise analysis methodto stability analysis of linear continuousdiscrete systems withtime-varying delayrdquo International Journal of Robust and Non-linear Control vol 19 no 13 pp 1493ndash1518 2009
[39] X-J Jing D-L Tan and Y-C Wang ldquoAn LMI approach tostability of systems with severe time-delayrdquo IEEE Transactionson Automatic Control vol 49 no 7 pp 1192ndash1195 2004
[40] D Yue Q-L Han and J Lam ldquoNetwork-based robust Hinfincontrol of systems with uncertaintyrdquo Automatica vol 41 no 6pp 999ndash1007 2005
[41] Z Wang F Yang D W C Ho and X Liu ldquoRobust Hinfincontrol for networked systemswith randompacket lossesrdquo IEEETransactions on Systems Man and Cybernetics Part B vol 37no 4 pp 916ndash924 2007
[42] M S Mahmoud ldquoControl of uncertain state-delay systemsguaranteed cost approachrdquo IMA Journal of Mathematical Con-trol and Information vol 18 no 1 pp 109ndash128 2001
[43] D Yue C Peng andG Y Tang ldquoGuaranteed cost control of lin-ear systems over networks with state and input quantisationsrdquoIEE Proceedings Control 13eory and Applications vol 153 no 6pp 658ndash664 2006
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Mathematical Problems in Engineering 7
Calculating the derivative of Lyapunov-Krasovskii functionand based on (21) we have
V1015840 (119905) = 2119909119879 (119905) 1198751199091015840 (119905) + 12057821198981199091015840119879 (119905) 11987711199091015840 (119905)minus 120578119898 int119905
119905minus120578119898
1199091015840119879 (119904) 11987711199091015840 (119904) 119889119904 + (1205781 minus 120578119898) 1199091015840119879 (119905)sdot 11987721199091015840 (119905) minus int119905minus120578119898
119905minus1205781
1199091015840119879 (119904) 11987721199091015840 (119904) 119889119904 + (120578119872 minus 1205781)sdot 1199091015840119879 (119905) 11987731199091015840 (119905) minus int119905minus1205781
119905minus120578119872
1199091015840119879 (119904) 11987731199091015840 (119904) 119889119904+ 2 [120576119879 (119905) 120596119879 (119905)] 119880 [(119860 + Δ119860) 119909 (119905)+ (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) 119909 (119905 minus 120578 (119905))+ 119867120596 (119905) minus 1199091015840 (119905)]
(29)
where V1015840(119905) = lim sup120575997888rarr0+(1120575)[V(119905 + 120575) minus V(119905)] [39]Based on Jessenrsquos inequality we have
minus 120578119898 int119905119905minus120578119898
1199091015840119879 (119904) 11987711199091015840 (119904) 119889119904 le [119909119879 (119905) 119909119879 (119905 minus 120578119898)]sdot [minus1198771 11987711198771 minus1198771] [ 119909 (119905)
119909 (119905 minus 120578119898)](30)
minus int119905minus120578119898119905minus1205781
1199091015840119879 (119904) 11987721199091015840 (119904) 119889119904le 1120572 [119909119879 (119905 minus 120578119898) 119909119879 (119905 minus 1205781)]sdot [minus1198772 11987721198772 minus1198772] [119909 (119905 minus 120578119898)119909 (119905 minus 1205781)]
(31)
minus int119905minus1205781119905minus120578119872
1199091015840119879 (119904) 11987731199091015840 (119904) 119889119904le 1120572 [119909119879 (119905 minus 1205781) 119909119879 (119905 minus 120578119872)]sdot [minus1198773 11987731198773 minus1198773] [ 119909 (119905 minus 1205781)119909 (119905 minus 120578119872)]
(32)
where 120572 = (120578119872 minus 120578119898)2 For the convenience of the followingdiscussion we define
120576119879 (119905) = [119909119879 (119905) 119909119879 (119905 minus 120578119898) 119909119879 (119905 minus 1205781) 119909119879 (119905 minus 120578119872)sdot 1199091015840119879 (119905) 119909119879 (119905 minus 120578 (119905)) 120596119879 (119905)] (33)
Case 1 If 120578(119905) isin [120578119898 1205781] weighted technology based on theprinciple of Newton-Leibniz is introduced as follows
2 [120576119879 (119905) 120596119879 (119905)] 1198721 [119909 (119905 minus 120578119898) minus 119909 (119905 minus 120578 (119905))minus int119905minus120578119898119905minus120578(119905)
1199091015840119879 (119904) 119889119904] = 0(34)
and
2 [120576119879 (119905) 120596119879 (119905)] 1198731 [119909 (119905 minus 120578 (119905)) minus 119909 (119905 minus 1205781)minus int119905minus120578(119905)119905minus1205781
1199091015840119879 (119904) 119889119904] = 0(35)
Because 1198772 gt 0 we haveminus 2 [120576119879 (119905) 120596119879 (119905)] 1198721 int119905minus120578119898
119905minus120578(119905)1199091015840 (119904) 119889119904 le (120578 (119905) minus 120578119898)
sdot [120576119879 (119905) 120596119879 (119905)] 1198721119877minus12 1198721119879 [120576119879 (119905) 120596119879 (119905)]119879+ int119905minus120578119898119905minus120578(119905)
1199091015840119879 (119904) 11987721199091015840 (119904) 119889119904(36)
and
minus 2 [120576119879 (119905) 120596119879 (119905)] 1198731 int119905minus120578(119905)119905minus1205781
1199091015840 (119904) 119889119904 le (1205781 minus 120578 (119905))sdot [120576119879 (119905) 120596119879 (119905)] 1198731119877minus12 1198731119879 [120576119879 (119905) 120596119879 (119905)]119879+ int119905minus120578(119905)119905minus1205781
1199091015840119879 (119904) 11987721199091015840 (119904) 119889119904(37)
Therefore
minus 2 [120576119879 (119905) 120596119879 (119905)] 1198721 int119905minus120578119898119905minus120578(119905)
1199091015840 (119904) 119889119904minus 2 [120576119879 (119905) 120596119879 (119905)] 1198731 int119905minus120578(119905)
119905minus1205781
1199091015840 (119904) 119889119904le (120578 (119905) minus 120578119898)sdot [120576119879 (119905) 120596119879 (119905)] 1198721119877minus12 1198721119879 [120576119879 (119905) 120596119879 (119905)]119879+ (1205781 minus 120578 (119905))sdot [120576119879 (119905) 120596119879 (119905)] 1198731119877minus12 1198731119879 [120576119879 (119905) 120596119879 (119905)]119879+ int119905minus120578119898119905minus1205781
1199091015840119879 (119904) 11987721199091015840 (119904) 119889119904
(38)
In addition 119910119879(119905)119910(119905)minus1205742120596119879(119905)120596(119905) both on the left and rightsides of equality (29) and 119909119879(119905)1198781119909(119905) + [Θ0(119868 + Γ)1198701198660(119868 +119871)119909(119905 minus 120578(119905))]1198791198782Θ0(119868 + Γ)1198701198660(119868 + 119871)119909(119905 minus 120578(119905)) on the rightof the equal sign ldquo=rdquo and then inserting (30) (32) (34) (35)(38) to the obtained inequality we have
V1015840 (119905) + 119910119879 (119905) 119910 (119905) minus 1205742120596119879 (119905) 120596 (119905)le [120576119879 (119905) 120596119879 (119905)] Φ1 [120576119879 (119905) 120596119879 (119905)]119879+ (120578 (119905) minus 120578119898)sdot [120576119879 (119905) 120596119879 (119905)] 1198721119877minus12 1198721119879 [120576119879 (119905) 120596119879 (119905)]119879+ (1205781 minus 120578 (119905))sdot [120576119879 (119905) 120596119879 (119905)] 1198731119877minus12 1198731119879 [120576119879 (119905) 120596119879 (119905)]119879
(39)
where
8 Mathematical Problems in Engineering
Φ1 =
[[[[[[[[[[[[[[[[[[[[
Ξ1 1198771 + [1198802 (119860 + Δ119860)]119879 + 11987211 [1198803 (119860 + Δ119860)]119879 minus 11987311 [1198804 (119860 + Δ119860)]119879lowast minus1198771 + 11987212 + 11987212119879 11987213119879 minus 11987312 11987214119879lowast lowast minus1198773120572 minus 11987312 minus 11987312119879 1198773120572 minus 11987314119879lowast lowast lowast minus1198773120572lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
119875 minus 1198801 + [1198805 (119860 + Δ119860)]119879 Ψ1 + [1198806 (119860 + Δ119860)]119879 [1198807 (119860 + Δ119860)]119879 + [1198808 (119860 + Δ119860)]119879 + 1198801119867 0minus1198802 + 11987215119879 Ψ2 + 11987216119879 1198802119867 + 11987217119879 + 11987218119879 0minus1198803 minus 11987315119879 Ψ3 minus 11987316119879 1198803119867 minus 11987317119879 minus 11987318119879 0
minus1198804 Ψ4 1198804119867 012057811989821198771 + 120572 (1198772 + 1198773) minus 1198805 minus 1198805119879 Ψ5 minus 1198806119879 1198805119867 minus 1198807119879 minus 1198808119879 0
lowast Ψ6 Ξ2 0lowast lowast 1198807119867 + 1198808119867 + (1198807119867)119879 + (1198808119867)119879 0lowast lowast lowast minus1205742119868
]]]]]]]]]]]]]]]]]]]
Ξ1 = minus1198771 + 1198801 (119860 + Δ119860) + [1198801 (119860 + Δ119860)]119879 + 119862119879119862 + 1198781Ξ2 = [1198807 (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 + [1198808 (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 + 1198806119867 minus 11987217119879 minus 11987218119879 + 11987317119879
+ 11987318119879Ψ119894 = 119880119894 (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) + 1198731119894 minus 1198721119894 (119894 = 1 2 3 4 5) Ψ6 = 1198806 (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)
+ [1198806 (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 [Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 1198782Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) minus 11987216 minus 11987216119879 + 11987316+ 11987316119879
(40)
ifΦ1 + (120578 (119905) minus 120578119898) 1198721119877minus12 1198721119879
+ (1205781 minus 120578 (119905)) 1198731119877minus12 1198731119879 lt 0 (41)
Next we need to acquire the inequality (24) through atransformation based on inequality (41) which is equivalentto the following inequalities by applying the theory given inLemma 7 and the Schur complement also used byD Yue [38]in the previous study
[minus (1205781 minus 120578119898)minus1 1198772 1198721119879lowast Φ1 ] lt 0 (42)
[minus (1205781 minus 120578119898)minus1 1198772 1198731119879lowast Φ1 ] lt 0 (43)
Premultiplying and postmultiplying the inequalities above bydiag((1205781 minus 120578119898)119868 119868) we have
[minus1205721198772 Ω1119896lowast Φ1 ] lt 0 (44)
Applying the theory of the Schur complement to inequality(44) we have
[[[[[[[
minus (1198781 + 119862119879119862)minus1 0 0 lowast minus1198782minus1 0 Σlowast lowast minus1205721198772 Ω1119896lowast lowast lowast Φ10158401
]]]]]]]
lt 0 (45)
where
Mathematical Problems in Engineering 9
Φ11015840 =
[[[[[[[[[[[[[[[[[[[[
Ξ11015840 1198771 + [1198802 (119860 + Δ119860)]119879 + 11987211 [1198803 (119860 + Δ119860)]119879 minus 11987311 [1198804 (119860 + Δ119860)]119879lowast minus1198771 + 11987212 + 11987212119879 11987213119879 minus 11987312 11987214119879lowast lowast minus1198773120572 minus 11987312 minus 11987312119879 1198773120572 minus 11987314119879lowast lowast lowast minus1198773120572lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
119875 minus 1198801 + [1198805 (119860 + Δ119860)]119879 Ψ1 + [1198806 (119860 + Δ119860)]119879 [1198807 (119860 + Δ119860)]119879 + [1198808 (119860 + Δ119860)]119879 + 1198801119867 0minus1198802 + 11987215119879 Ψ2 + 11987216119879 1198802119867 + 11987217119879 + 11987218119879 0minus1198803 minus 11987315119879 Ψ3 minus 11987316119879 1198803119867 minus 11987317119879 minus 11987318119879 0minus1198804 Ψ4 1198804119867 0
12057811989821198771 + 120572 (1198772 + 1198773) minus 1198805 minus 1198805119879 Ψ5 minus 1198806119879 1198805119867 minus 1198807119879 minus 1198808119879 0lowast Ψ61015840 Ξ2 0lowast lowast 1198807119867 + 1198808119867 + (1198807119867)119879 + (1198808119867)119879 0lowast lowast lowast minus1205742119868
]]]]]]]]]]]]]]]]
Ξ11015840 = minus1198771 + 1198801 (119860 + Δ119860) + [1198801 (119860 + Δ119860)]119879Ψ61015840 = 1198806 (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) + [1198806 (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 minus 11987216 minus 11987216119879 + 11987316 + 11987316119879
Σ = [0 0 0 0 0 Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) 0 0]
(46)
Inequality (44) can be written as
[[[[[
minus (1198781 + 119862119879119862)minus1 0 0 lowast minus1198782minus1 0 Σlowast lowast minus1205721198772 Ω1119896lowast lowast lowast Φ101584010158401]]]]]
+ [[[[
000119863]]]]
119865 [[[[
000119864119879
]]]]
119879
+ [[[[
000119864119879
]]]]
119865119879[[[[[
000
]]]]]
119879
lt 0(47)
where
Φ110158401015840 =
[[[[[[[[[[[[[[[[[[[[
minus1198771 + 1198801119860 + (1198801119860)119879 1198771 + (1198802119860)119879 + 11987211 (1198803119860)119879 minus 11987311 (1198804119860)119879lowast minus1198771 + 11987212 + 11987212119879 11987213119879 minus 11987312 11987214119879lowast lowast minus1198773120572 minus 11987312 minus 11987312119879 1198773120572 minus 11987314119879lowast lowast lowast minus1198773120572lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
10 Mathematical Problems in Engineering
119875 minus 1198801 + (1198805119860)119879 Ψ110158401015840 + (1198806119860)119879 (1198807119860)119879 + (1198808119860)119879 + 1198801119867 0minus1198802 + 11987215119879 Ψ210158401015840 + 11987216119879 1198802119867 + 11987217119879 + 11987218119879 0minus1198803 minus 11987315119879 Ψ310158401015840 minus 11987316119879 1198803119867 minus 11987317119879 minus 11987318119879 0
minus1198804 Ψ41015840 1198804119867 012057811989821198771 + 120572 (1198772 + 1198773) minus 1198805 minus 1198805119879 Ψ510158401015840 minus 1198806119879 1198805119867 minus 1198807119879 minus 1198808119879 0
lowast Ψ610158401015840 Ξ210158401015840 0lowast lowast 1198807119867 + 1198808119867 + (1198807119867)119879 + (1198808119867)119879 0lowast lowast lowast minus1205742119868
]]]]]]]]]]]]]]]]]]]
Ξ210158401015840 = [1198807119861Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 + [1198808119861Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 + 1198806119867 minus 11987217119879 minus 11987218119879 + 11987317119879 + 11987318119879Ψ11989410158401015840 = 119880119894119861Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) + 1198731119894 minus 1198721119894 (119894 = 1 2 3 4 5)
Ψ61015840 = 1198806119861Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) + [1198806119861Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 minus 11987216 minus 11987216119879 + 11987316 + 11987316119879 = [1198641 0 0 0 0 1198642Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) 0 0]
(48)
With the definition of scalar 120576 gt 0 we apply the theory givenin Lemma 6 to (47) also used by Y Wang and L Xie [37]in which the uncertain matrix 119865 can be eliminated and asufficient condition of (47) is obtained
[[[[[[[
minus (1198781 + 119862119879119862)minus1 0 0 lowast minus1198782minus1 0 Σlowast lowast minus1205721198772 Ω1119896lowast lowast lowast Φ101584010158401
]]]]]]]
+ 120576 [[[[[[
01198630
]]]]]]
[[[[[[
01198630
]]]]]]
119879
+ 120576minus1[[[[[[[
000
119879
]]]]]]]
[[[[[[[
000
119879
]]]]]]]
119879
lt 0
(49)
Applying the Schur complement to inequality (49) we have
[[[[[[[[[[[[[[
minus120576119868 0 0 0 120576119879 0lowast minus (1198781 + 119862119879119862)minus1 0 0 0lowast lowast minus1198782minus1 0 Σ 0lowast lowast lowast minus1205721198772 Ω1119896 0lowast lowast lowast lowast Φ101584010158401 119879lowast lowast lowast lowast lowast minus120576119868
]]]]]]]]]]]]]]
lt 0
(50)
There exists 1205881 gt 0 1205882 gt 0 Based on (17) and Remark 3 inSection 2 we know that 119871119879119871 le 119868 and Γ119879Γ le 119868 According
to expressions (47) (49) and (50) we obviously know that1198805 gt 0 Using Lemma 6 again we have
Θ0 (119868 + Γ) 1198701198660119871 + [Θ0 (119868 + Γ) 1198701198660119871]119879le 1205881minus1Θ0 (119868 + Γ) 11987011986601198805minus1 [Θ0 (119868 + Γ) 1198701198660]119879
+ 12058811198805(51)
and
Θ0Γ1198701198660 + (Θ0Γ1198701198660)119879le 1205882minus1Θ0Θ0119879 + 1205882 (1198701198660)1198791198701198660
(52)
Based on inequalities (51) (52) and the Schur complementwe know inequality (24) is a sufficient condition of inequality(50) while inequality (50) is equivalent to inequality (41)Therefore we can undoubtedly obtain inequality (24) asa sufficient condition of inequality (41) Thus based oninequality (39) and (41) we know(1) if120596(119905) equiv 0 obviously we have V1015840(119905) lt 0 so system (21)is asymptotically stable(2) if 119909(0) equiv 0 we know V(0) = 0 In addition it can beobtained that V(infin) ge 0
Therefore
intinfin0
V1015840 (119905) + 119910119879 (119905) 119910 (119905) minus 1205742120596119879 (119905) 120596 (119905) 119889119905= V (infin) + intinfin
0119910119879 (119905) 119910 (119905) minus 1205742120596119879 (119905) 120596 (119905) 119889119905 lt 0
(53)
Thus
intinfin0
119910119879 (119905) 119910 (119905) lt intinfin0
1205742120596119879 (119905) 120596 (119905) 119889119905 (54)
Mathematical Problems in Engineering 11
Because 120596(119905) isin 1198712[0 infin) we have1003817100381710038171003817119910 (119905)1003817100381710038171003817 le 120574 120596 (119905)119879 (55)
It is known that model (21) is asymptotically stable with the119867infin norm bound 120574Moreover according to (39) and (41) we have
V1015840 (119905) le minus119909119879 (119905) 1198781119909 (119905)minus [Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) 119909 (119905 minus 120578 (119905))]119879
sdot 1198782Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) 119909 (119905 minus 120578 (119905))(56)
Through the integral operation it can be determined that119869 le V(0) In addition by inserting 119905 = 0 into the Lyapunov-Krasovskii function shown as expression (28) the upperbound of cost function 119869 can be obtained and shown asexpression (26) Therefore the theorem is verified if 119897 = 1Case 2 If 120578(119905) isin [1205781 120578119872] weighted technology based on theprinciple of Newton-Leibniz is introduced as follows
2 [120576119879 (119905) 120596119879 (119905)] 1198722 [119909 (119905 minus 1205781) minus 119909 (119905 minus 120578 (119905))minus int119905minus1205781119905minus120578(119905)
1199091015840119879 (119904) 119889119904] = 0(57)
2 [120576119879 (119905) 120596119879 (119905)] 1198732 [119909 (119905 minus 120578 (119905)) minus 119909 (119905 minus 120578119872)minus int119905minus120578(119905)119905minus120578119872
1199091015840119879 (119904) 119889119904] = 0(58)
Because 1198773 gt 0 we have
minus 2 [120576119879 (119905) 120596119879 (119905)] 1198722 int119905minus1205781119905minus120578(119905)
1199091015840 (119904) 119889119904 le (120578 (119905) minus 1205781)sdot [120576119879 (119905) 120596119879 (119905)] 1198722119877minus13 1198722119879 [120576119879 (119905) 120596119879 (119905)]119879+ int119905minus1205781119905minus120578(119905)
1199091015840119879 (119904) 11987731199091015840 (119904) 119889119904(59)
minus 2 [120576119879 (119905) 120596119879 (119905)] 1198732 int119905minus120578(119905)119905minus120578119872
1199091015840 (119904) 119889119904 le (120578119872 minus 120578 (119905))sdot [120576119879 (119905) 120596119879 (119905)] 1198732119877minus13 1198731119879 [120576119879 (119905) 120596119879 (119905)]119879+ int119905minus120578(119905)119905minus120578119872
1199091015840119879 (119904) 11987731199091015840 (119904) 119889119904(60)
Therefore
minus 2 [120576119879 (119905) 120596119879 (119905)] 1198722 int119905minus1205781119905minus120578(119905)
1199091015840 (119904) 119889119904
minus 2 [120576119879 (119905) 120596119879 (119905)] 1198732 int119905minus120578(119905)119905minus120578119872
1199091015840 (119904) 119889119904le (120578 (119905) minus 1205781)sdot [120576119879 (119905) 120596119879 (119905)] 1198722119877minus13 1198722119879 [120576119879 (119905) 120596119879 (119905)]119879+ (120578119872 minus 120578 (119905))sdot [120576119879 (119905) 120596119879 (119905)] 1198732119877minus13 1198732119879 [120576119879 (119905) 120596119879 (119905)]119879
+ int119905minus1205781119905minus120578119872
1199091015840119879 (119904) 11987731199091015840 (119904) 119889119904
(61)
In addition 119910119879(119905)119910(119905)minus1205742120596119879(119905)120596(119905) both on the left and rightsides of equality (29) and 119909119879(119905)1198781119909(119905) + [Θ0(119868 + Γ)1198701198660(119868 +119871)119909(119905minus120578(119905))]1198791198782Θ0(119868+Γ)1198701198660(119868+119871)119909(119905minus120578(119905)) on the right sideof equal sign ldquo=rdquo By inserting (30) (31) (57) (58) and (61)into the obtained inequality the item minus int119905minus1205781
119905minus1205781198721199091015840119879(119904)11987731199091015840(119904)119889119904
can be offset while the item minus int119905minus120578119898119905minus1205781
1199091015840119879(119904)11987721199091015840(119904)119889119904 is offsetin Case 1 Then in the same methods of transformation asCase 1 the inequality (24) when 119897 = 2 can be obtainedTherefore the proof is complete
Remark 9 In the two different cases a variational weightingmatrix and Jessenrsquos inequalities are used to derive the 119867infinguaranteed cost fault-tolerant condition of the system inwhich more delay information is employed to reduce theconservatism
The next section will provide sufficient conditions fordesigning the guaranteed cost fault-tolerant control for adouble-fault NCS
4 Guaranteed Cost Fault-Tolerant Control ofDouble-Fault NCS
Inequality (24) is not linear with respect to the gain matricesof the controller so it is needs to be reformulated into LMIsvia a change of variables
Theorem 10 Given symmetric positive definite matrices 1198781and 1198782 a set of constant 120578119898 120578119872 1205881 gt 0 1205882 gt 0 120582119894 (119894 = from1 to 7) and 120572 = (120578119872 minus 120578119898)2 If there exists a set of symmetricpositive definite matrices 119895 (119895 = 1 2 3)119883 andmatrix gt 0as well as matrices 1120573 2120573 1120573 2120573 (120573 =from 1 to 8)
12 Mathematical Problems in Engineering
119884 and a set of constants 120576 gt 0 and 120583 gt 0 satisfying theLMIs
[[[[[[[[[[[[[[[[[[[[[[[[[[
minus120576119868 0 0 0 120576119863119879lowast minus (1198781 + 119862119879119862)minus1 0 0 Πlowast lowast minus1198782minus1 0 Σlowast lowast lowast minusΓ119897 Ω119897119896lowast lowast lowast lowast Φ119897lowast lowast lowast lowast lowastlowast lowast lowast lowast lowastlowast lowast lowast lowast lowastlowast lowast lowast lowast lowastlowast lowast lowast lowast lowast
0 0 0 0 00 0 0 0 00 Θ0119884 0 Θ0 00 0 0 0 0
119864119879 Θ 119883 Δ 119884119879minus120576119868 1198642Θ0119884 0 1198642Θ0 0lowast minus1205881119883119879 0 0 119884119879lowast lowast minus1205881minus1119883 0 0lowast lowast lowast minus1205882119868 0lowast lowast lowast lowast minus1205882minus1119868
]]]]]]]]]]]]]]]]]]]]]]
lt 0
119897 = 1 2 119896 = 1 2(62)
where
Φ1 =
[[[[[[[[[[[[[[[[[[[[[
minus1 + 1205821119860119883119879 + 1205821119883119860119879 1 + 1205822119883119860119879 + 11 1205823119883119860119879 minus 11 1205824119883119860119879lowast minus1 + 12 + 12119879 13119879 minus 12 14119879lowast lowast minus3120572 minus 12 minus 12119879 3120572 minus 14119879lowast lowast lowast minus3120572lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
minus 1205821119883119879 + 119883119860119879 Ψ1 + 1205825119883119860119879 1205826119883119860119879 + 1205827119883119860119879 + 1205821119867119883119879 0minus1205822119883119879 + 15119879 Ψ2 + 16119879 1205822119867119883119879 + 17119879 + 18119879 0minus1205823119883119879 minus 15119879 Ψ3 minus 16119879 1205823119867119883119879 minus 17119879 minus 18119879 0
minus1205824119883119879 Ψ4 1205824119867119883119879 012057811989821 + 120572 (2 + 3) minus 119883119879 minus 119883 Ψ5 minus 1205825119883 119867119883119879 minus 1205826119883 minus 1205827119883 0
lowast Ψ6 Ξ 0lowast lowast 1205826119867119883119879 + 1205827119867119883119879 + 1205826119883119867119879 + 1205827119883119867119879 0lowast lowast lowast minus120583119868
]]]]]]]]]]]]]]]]]
Φ2 =
[[[[[[[[[[[[[[[[[[[[[
minus1 + 1205821119860119883119879 + 1205821119883119860119879 1 + 1205822119883119860119879 1205823119883119860119879 + 21 1205824119883119860119879 minus 21lowast minus1 minus 2120572 2120572 + 22 minus22lowast lowast minus2120572 + 23 + 23119879 24119879 minus 23lowast lowast lowast minus24 minus 24119879lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
Mathematical Problems in Engineering 13
minus 1205821119883119879 + 119883119860119879 Ψ11015840 + 1205825119883119860119879 1205826119883119860119879 + 1205827119883119860119879 + 1205821119867119883119879 0minus1205822119883119879 Ψ21015840 1205822119867119883119879 0
minus1205823119883119879 + 25119879 Ψ31015840 + 26119879 1205823119867119883119879 + 27119879 + 28119879 0minus1205824119883119879 minus 25119879 Ψ41015840 minus 26119879 1205824119867119883119879 minus 27119879 minus 28119879 0
12057811989821 + 120572 (2 + 3) minus 119883 minus 119883119879 Ψ51015840 minus 1205825119883 119867119883119879 minus 1205826119883 minus 1205827119883 0lowast Ψ61015840 Ξ1015840 0lowast lowast 1205826119867119883119879 + 1205827119867119883119879 + 1205826119883119867119879 + 1205827119883119867119879 0lowast lowast lowast minus120583119868
]]]]]]]]]]]]]]]]]]]]]
Γ1 = 1205721198772Γ1 = 1205722Γ2 = 1205723
Ω11 = 1205721119879Ω12 = 1205721119879Ω21 = 1205722119879Ω22 = 1205722119879
1119879 = [11119879 12119879 13119879 14119879 15119879 16119879 17119879 18119879] 2119879 = [21119879 22119879 23119879 24119879 25119879 26119879 27119879 28119879]
1119879 = [11119879 12119879 13119879 14119879 15119879 16119879 17119879 18119879] 1198732119879 = [21119879 22119879 23119879 24119879 25119879 26119879 27119879 28119879]
Ξ = 1205826 (119861Θ0119884)119879 + 1205827 (119861Θ0119884)119879 + 1205825119867119883119879 minus 17119879 minus 18119879 + 17119879 + 18119879Ψ119894 = 120582119894119861Θ0119884 + 1119894 minus 1119894 (119894 = 1 2 3 4)
Ψ5 = 119861Θ0119884 + 1119894 minus 1119894Ψ6 = 1205825119861Θ0119884 + 1205825 (119861Θ0119884)119879 minus 11987216 minus 11987216119879 + 11987316 + 11987316119879
Ξ1015840 = 1205826 (119861Θ0119884)119879 + 1205827 (119861Θ0119884)119879 + 1205825119867119883119879 minus 27119879 minus 28119879 + 27119879 + 28119879Ψ1198941015840 = 120582119894119861Θ0119884 + 2119894 minus 2119894 (119894 = 1 2 3 4)
Ψ51015840 = 119861Θ0119884 + 2119894 minus 2119894Ψ61015840 = 1205825119861Θ0119884 + 1205825 (119861Θ0119884)119879 minus 26 minus 26119879 + 26 + 26119879
119863 = [1205821119863119879 1205822119863119879 1205823119863119879 1205824119863119879 119863119879 1205825119863119879 1205826119863119879 + 1205827119863119879 0]119879 119864 = [1198641119883119879 0 0 0 0 1198642Θ0119884 0 0]
119883 = [0 0 0 0 0 119883119879 0 0]119879 Π = [119883119879 0 0 0 0 0 0 0]
14 Mathematical Problems in Engineering
Θ = [(1205821119861Θ0119884)119879 (1205822119861Θ0119884)119879 (1205823119861Θ0119884)119879 (1205824119861Θ0119884)119879 (119861Θ0119884)119879 (1205825119861Θ0119884)119879 (1205826119861119884)119879 + (1205827119861119884)119879 0]119879 Δ = [(1205821119861Θ0)119879 (1205822119861Θ0)119879 (1205823119861Θ0)119879 (1205824119861Θ0)119879 (119861Θ0)119879 (1205825119861Θ0)119879 (1205826119861Θ0)119879 + (1205827119861Θ0)119879 0]119879
119884 = [0 0 0 0 0 119884 0 0] Σ = [0 0 0 0 0 Θ0119884 0 0]
(63)
then the 119867infin guaranteed cost control gain 119870 = 119884119883minus1198791198660minus1 canrendermodel (21) to be asymptotically stable with the119867infin normbound 120574 = radic120583 13e upper bound 1198690 of cost function 119869 is givenas
1198690 = 119909119879 (0) 119883minus1119883minus119879119909 (0)+ 120578119898 int0
minus120578119898
int0119904
1199091015840119879 (120591) 119883minus11119883minus1198791199091015840 (120591) 119889119904119889120591+ intminus120578119898minus1205781
int0119904
1199091015840119879 (120591) 119883minus12119883minus1198791199091015840 (120591) 119889119904119889120591+ intminus1205781minus120578119872
int0119904
1199091015840119879 (120591) 119883minus13119883minus1198791199091015840 (120591) 119889119904119889120591
(64)
Proof The proof is based on a suitable transformation anda change of variables allowing us to obtain inequality (24)in Theorem 8 First we define 1198805 = 1198800 119880119894 = 1205821198941198800 (119894 =from 1 to 4) 1198806 = 12058251198800 in (24) Because we consider thedimension of state119909is equal to that of outside disturbance120596 in this paper we can also define 1198807 = 12058261198800 1198808 =12058271198800 Obviously (24) implies 1198805 gt 0 so 1198800 is nonsingularThen using the analysis method of D Yue [40] and Z Wang[41] pre- and postmultiplying both sides of inequality (24)with diag(119868 119868 119868 119883 119868 119883 119868 119868 119868) and its transpose where = diag(119883 119883 119883 119883 119883 119883 119883 119883) and 119883 = 1198800minus1 introducingnew variables 119883119875119883119879 = 119883119877119895119883119879 = 119895 (119895 = 1 2 3)119883119872119897120573119883119879 = 119897120573 119883119873119897120573119883119879 = 119897120573 (119897 = 1 2 120573 = 1 2 sdot sdot sdot 8)1198701198660119883119879 = 119884 and 120583 = 1205742 From the definition of 1198660 we know1198660 is invertible so 119870 can be obtained by calculating 119870 =119884119883minus1198791198660minus1 It is easy to see that 10 and (64) respectively imply(24) and (26) Therefore from Theorem 8 we can completethe proof
To obtain the optimal bound 119869lowast shown in (26) thecommonly used method is to consider it as an optimizationproblem like [42] in which the expression of initial state 119909(119905)(119905 isin [minus120578119872 0]) needs to be known The expression of initialstate is not given in this paper Therefore the optimizationmethod used in [42] cannot be used here A practical methodto obtain 119869lowast also used by D Yue [43] is employed as follows
Suppose 1199091015840(119905) is bounded if 119905 isin [minus120578119872 0] and satisfying1199091015840119879(120591)1199091015840(120591) le ℓ In addition suppose that there exists 120573119894 gt0 (119894 = 1 2 3) satisfying119883minus1119894119883minus119879 le 120573119894119868 119894 = 1 2 3119883minus1119883minus119879 le 1205734119868 (65)
Inserting this into (64) we have
1198690 le 1205734119909119879 (0) 119909 (0) + 05ℓ12057311205781198983 + 05ℓ1205732 (12057812 minus 1205781198982)+ 05ℓ1205733 (1205781198722 minus 12057812) = 119869lowast (66)
Applying the Schur complement to the inequalities above wehave
[minus120573119894119868 119883minus1lowast minus119877119894minus1] lt 0 119894 = 1 2 3
[minus1205734119868 119883minus1lowast minus119875minus1] lt 0
(67)
Then combining 10 and (67) 119894minus1 119894 (119894 = 1 2 3)minus1 119883minus1 119883 exist simultaneously We cannot directly usethe LMI tools to solve the problem Defining 119894minus1 = 119894(119894 = 1 2 3) minus1 = 119883minus1 = and using the idea of thecone complementary linearization algorithm the guaranteedcost fault-tolerant controller of system (21) and the value ofoptimal performance indicator 119869lowast can be obtained in thefollowing method
Minimize 119905119903119886119888119890 (11 + 22 + 33 + + )+ 1205734 + 0512057311205781198983 + 051205732 (12057812 minus 1205781198982)+ 051205733 (1205781198722 minus 12057812)
Subject to 119868119899119890119902119906119886119897119894119905119894119890119904 (62) [minus120573119894119868
lowast minus119894] lt 0 (119894 = 1 2 3)
[minus1205734119868 lowast minus] lt 0
[119883 119868lowast ] ge 0
[1 119868lowast 1] ge 0
[2 119868lowast 2] ge 0
Mathematical Problems in Engineering 15
[3 119868lowast 3] ge 0
[ 119868lowast ] ge 0
119894 gt 0 (119894 = 1 2 3) (68)
5 Simulations
Example 11 Consider inverted pendulum model that canusually be modelled as (1) and the system parameters aregiven as follows
119860 = [minus2 1110 4 ]
119861 = [01minus4]
119862 = [minus03151 01011 03]
119867 = [015 minus056minus01 032 ]
Δ119860 = [004 sin 119905 015 sin 119905minus02 sin 119905 075 sin 119905]
Δ119861 = [002 sin 119905minus01 sin 119905]
119863 = [ 01minus05]
119865 (119905) = sin 119905
(69)
Therefore we have
1198641 = [04 15] 1198642 = 02 (70)
For this simulation the initial state of system is assumed119909(0) = [2 minus1]119879 and the external disturbance is considered as120596(119905) = [015 minus05]119879 3119904 le 119905 le 4119904
0 119900119905ℎ119890119903119904 Here we take the upper
bound of time-varying delay as 120578119872 = 03119904 and its lower boundas 120578119898 = 0119904 namely 0 le 120578(119905) le 03 In addition the faultbounds of the system are given in Table 1
Table 1 The bounds of faults
Symbol Upper bound Lower boundActuatorfaultsΘ 136 009
SensorFaults119866
[[
165 00 175]
][[
0 00 015]
]
minus01
0
01
02
03
04
05
Del
ay
1 2 3 4 5 60Time s
Figure 2 The time-varying delay in double-fault NCS
We choose the parameters as follows
1205821 = 011205822 = 0151205823 = minus0641205824 = 031205825 = 1205826 = 0351205827 = 181198782 = 0311205881 = 30001205882 = 22032ℓ = 1
1198781 = [10013 00 9207]
(71)
By taking advantage of the LMI tool box and inserting theabove parameters into inequalities 10 and (68) we can obtainthe 119867infin guaranteed cost control gain
119870 = 119884119883minus1198791198660minus1 = [85163 151398] (72)
with 120574 = radic120583 = 1952516The corresponding optimal performance indicator (the
upper bound value of guaranteed cost function) is 119869lowast =83162563The time-varying delay is shown in Figure 2 In Figure 3
(a) is the actuator fault which is a piecewise-linear function
16 Mathematical Problems in Engineering
002040608
1121416
Actu
ator
faul
t
1 2 3 4 5 60Time s
(a) Time-varying actuator fault
minus020
02040608
112141618
Sens
or fa
ult
1 2 3 4 5 60Time s
(b) Time-varying sensor fault
Figure 3 The time-varying faults
x1
x2
1 2 3 4 5 60Time s
minus15
minus1
minus05
0
05
1
15
2
Stat
e X
Figure 4 The state response curve of double-fault NCS
1 2 3 4 5 60Time s
minus8minus7minus6minus5minus4minus3minus2minus1
012
Con
trol i
nput
Figure 5 The control input of double-fault NCS
It keeps the minimum value from 13119904 to 17119904 while it keepsthe maximum value from 37119904 to 43119904 The sensor faults areshown as (b) which is sinusoidal It should be noted thatthe green dotted line represents the fault of sensor 1 whilethe blue solid line represents the fault of sensor 2 Throughthe state response of the double-fault NCS shown in Figure 4and corresponding control signal shown in Figure 5 we know
x1
x2
1 2 3 4 5 60Time s
minus8
minus6
minus4
minus2
0
2
4
6
Stat
e X
Figure 6 The state response curve of double-fault NCS
the 119867infin guaranteed cost controller designed in this paper isable to make the double-fault NCS asymptotically stable Thesystem gets preliminarily steady at 2119904 and its state can returnto the equilibrium position in a certain period of time whenthe NCS is affected by external disturbance Compared withthe state response of worse stability shown in Figure 6 whenthe method proposed in [28] is used for this double-faultproblem it sufficiently proves the effectiveness and feasibilityof the method proposed in this paper
To better illustrate the effectiveness of the method pro-posed in this paper the following example is presented
Example 12 Consider the parameters of system (1) as follows
119860 = [[[[[[
021 0 035 10 minus53 minus586 323
365 minus11 minus156 minus0890 0 minus158 minus285
]]]]]]
119861 = [559 12 minus089 13]119879 119862 = [17 02 015 minus018]
Mathematical Problems in Engineering 17
minus15
minus1
minus05
0
05
1
15
Stat
e X1 2 3 4 5 6 7 8 9 100
Time s
R1R2
R3R4
Figure 7 The state response curve of double-fault NCS
Δ119860 = [[[[
082 sin 119905 0 0 00 012 sin 119905 0 00 0 minus058 sin 119905 00 0 0 101 sin 119905]]]]
Δ119861 = [[[[
minus015 sin 119905008 sin 1199050minus028 sin 119905]]]]
119867 = [[[[
minus041 096 052 0006 minus057 0 021121 0 059 0minus032 minus011 minus035 minus003]]]]
119863 = 1198684times4119865 (119905) = diag (sin 119905 sin 119905 sin 119905 sin 119905)
(73)
Therefore we have
1198641 = diag (082 012 minus058 101) 1198642 = [minus015 008 0 minus028]119879 (74)
For this simulation the initial state of system is assumedas 119909(0) = [121 minus051 023 minus018]119879 and the externaldisturbance is considered as
120596 (119905) = [015 cos 119905 015 cos 119905 minus012 sin 119905 minus025 cos 119905]119879 6119904 le 119905 le 81199040 119900119905ℎ119890119903119904 (75)
The uncertain time-varying delay satisfies 0 le 120578(119905) le023119904 In addition the fault bounds of the system are givenin Table 2 Other parameters are selected as follows
1205821 = 121205822 = minus2031205823 = 1681205824 = minus231205825 = minus1051205826 = 6051205827 = 5121198781 = diag (19888 15634 8709 12876) 1198782 = 586
1205881 = 57981205882 = 1879ℓ = 1
(76)
By taking advantage of the LMI tool box and submittingthese parameters above into inequalities 10 and (68) we canobtain the 119867infin guaranteed cost control gain
119870 = 119884119883minus1198791198660minus1= [minus17256 15512 minus08571 07451]
with 120574 = radic120583 = 5819806(77)
The corresponding optimal performance indicator is 119869lowast =65021047 From the state response shown in Figure 7 andcontrol signal shown in Figure 8 we undoubtedly know
18 Mathematical Problems in Engineering
Table 2 The bounds of faults
Symbol Upper bound Lower boundActuatorfaultsΘ 150 012
SensorFaults119866
[[[[[[[[
185 0 0 00 160 0 00 0 125 00 0 0 165
]]]]]]]]
[[[[[[[[
025 0 0 00 0 0 00 0 0 00 0 0 015
]]]]]]]]
minus4
minus3
minus2
minus1
0
1
2
Con
trol i
nput
1 2 3 4 5 6 7 8 9 100Time s
Figure 8 The control input of double-fault NCS
the double-fault NCS is asymptotically stable when the 119867infinguaranteed cost controller is used This further demonstratesthe feasibility and effectiveness of the method proposed inthis paper
6 Conclusions
The issues of modelling and 119867infin guaranteed cost fault-tolerant control of double-fault networked control systemshave been addressedThe closed-loopmodel of a double-faultNCS is set up with regard to the influences of transmissiondelay packet dropout uncertain parameters and externaldisturbance In addition the piecewise delay method is pro-posed to reduce the conservatism when analysing the delay-dependent faulty system With the help of Lee Y Srsquos lemmathe sufficient condition of guaranteed cost fault-tolerantfor time-varying double-fault NCS is introduced using theLyapunov-Krasovskii theory and weighted technology Themethod of designing a guaranteed cost fault-tolerant con-troller for this NCS is given based on LMI Our next researchtask will be choosing more reasonable values of parameters120582119894 (119894 = 1 2 3 4 5 6 7) to reduce the conservatism further Ofcourse the study on scheduling policy of double-fault NCS isalso a challenge but indispensable work
Data Availability
The data used in this paper can be got by simulations
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was partly supported by National Nature Sci-ence Foundation of China under Grants 51875380 51375323and 61563022 Cooperative Innovation Fund-Prospective ofJiangsu Province under Grant BY2016044-01Major Programof Natural Science Foundation of Jiangxi Province Chinaunder Grant 20152ACB20009 High Level Talents of ldquoSix Tal-ent Peaksrdquo in Jiangsu Province China under Grant DZXX-046
References
[1] H Zhang Y Shi J Wang and H Chen ldquoA New Delay-compensation Scheme for Networked Control Systems inController Area Networksrdquo IEEE Transactions on IndustrialElectronics vol 65 no 9 pp 7239ndash7247 2018
[2] A Da Silva and C Kawan ldquoRobustness of critical bit rates forpractical stabilization of networked control systemsrdquo Automat-ica vol 93 pp 397ndash406 2018
[3] Q Zhu K Lu and Y Zhu ldquoGuaranteed cost control ofnetworked control systems under transmission control protocolwith active queue managementrdquo Asian Journal of Control vol18 no 4 pp 1546ndash1557 2016
[4] Q Zhu K Lu and Y Zhu ldquoHinfin Guaranteed Cost Control forNetworked Control Systems under Scheduling Policy Based onPredicted Errorrdquo Mathematical Problems in Engineering vol2014 Article ID 586029 12 pages 2014
[5] W H Chen J X Xu and Z H Guan ldquoGuaranteed cost controlfor uncertain Markovian jump systems with mode-dependenttime-delaysrdquo IEEE Transactions on Automatic Control vol 48no 12 pp 2270ndash2277 2003
[6] HM Soliman A DabroumM S Mahmoud andM SolimanldquoGuaranteed-cost reliable control with regional pole placementof a power systemrdquo Journal of 13e Franklin Institute vol 348no 5 pp 884ndash898 2011
[7] X Li and X-B Wu ldquoGuaranteed cost fault-tolerant controllerdesign of networked control systems under variable-periodsamplingrdquo Information Technology Journal vol 8 no 4 pp 537ndash543 2009
[8] L Zhang and G Orosz ldquoMotif-Based Design for ConnectedVehicle Systems in Presence of Heterogeneous ConnectivityStructures and Time Delaysrdquo IEEE Transactions on IntelligentTransportation Systems vol 17 no 6 pp 1638ndash1651 2016
[9] Z Li G Guo and Z Liu ldquoCommunication parameter designfor networked control systems with the slotted ALOHA accessprotocolrdquo Information Sciences vol 447 pp 205ndash215 2018
[10] K Lu G Jing and L Wang ldquoDistributed algorithm for solv-ing convex inequalitiesrdquo Institute of Electrical and ElectronicsEngineers Transactions on Automatic Control vol 63 no 8 pp2670ndash2677 2018
[11] Q Zhu K Lu and Y Zhu ldquoObserver-based feedback controlof networked control systems with delays and packet dropoutsrdquoJournal of Dynamic SystemsMeasurement andControl vol 138no 2 pp 1ndash8 2016
Mathematical Problems in Engineering 19
[12] Y Li H Li and W Sun ldquoEvent-triggered control for robust setstabilization of logical control networksrdquo Automatica vol 95pp 556ndash560 2018
[13] X Luan P Shi and F Liu ldquoStabilization of networked controlsystems with random delaysrdquo IEEE Transactions on IndustrialElectronics vol 58 no 9 pp 4323ndash4330 2011
[14] Y Zhang and J Jiang ldquoBibliographical review on reconfigurablefault-tolerant control systemsrdquo Annual Reviews in Control vol32 no 2 pp 229ndash252 2008
[15] N H Ei-Farra A Gani and P D Christofides ldquoFault-tolerantcontrol of process systems using communication networksrdquoAIChE Journal vol 51 no 6 pp 1665ndash1682 2005
[16] H R Karimi and H Gao ldquoNew delay-dependent exponentialHinfin synchronization for uncertain neural networks withmixedtime delaysrdquo IEEE Transactions on Systems Man and Cybernet-ics Part B Cybernetics vol 40 no 1 pp 173ndash185 2010
[17] Y N Guo Q Y Zhang D W Gong and J H Zhang ldquoRobustfault-tolerant control of networked control systems with time-varying delaysrdquoControl andDecision vol 23 no 6 pp 689ndash6922008
[18] Z Mao and B Jiang ldquoFault identification and fault-tolerantcontrol for a class of networked control systemsrdquo InternationalJournal of Innovative Computing Information and Control vol3 no 5 pp 1121ndash1130 2007
[19] C-X Yang Z-H Guan and J Huang ldquoStochastic fault tolerantcontrol of networked control systemsrdquo Journal of 13e FranklinInstitute vol 346 no 10 pp 1006ndash1020 2009
[20] Z Mao Y Pan B Jiang and W Chen ldquoFault Detectionfor a Class of Nonlinear Networked Control Systems withCommunication Constraintsrdquo International Journal of ControlAutomation and Systems vol 16 no 1 pp 256ndash264 2018
[21] A Qiu J Gu C Wen and J Zhang ldquoSelf-triggered faultestimation and fault tolerant control for networked controlsystemsrdquo Neurocomputing vol 272 no 1 pp 629ndash637 2018
[22] Q Zhu K Lu G Xie and Y Zhu ldquoGuaranteed Cost Fault-Tolerant Control for Networked Control Systems with SensorFaultsrdquoMathematical Problems in Engineering vol 2015 ArticleID 549347 9 pages 2015
[23] W Wu and Y Zhang ldquoEvent-triggered fault-tolerant controland scheduling codesign for nonlinear networked control sys-tems with medium-access constraint and packet disorderingrdquoInternational Journal of Robust and Nonlinear Control vol 28no 4 pp 1182ndash1198 2018
[24] X Xiao and X-J Li ldquoAdaptive dynamic programming method-based synchronisation control of a class of complex dynamicalnetworks with unknown dynamics and actuator faultsrdquo IETControl 13eory amp Applications vol 12 no 2 pp 291ndash298 2018
[25] PMhaskar AGani CMcFall PDChristofides and J FDavisldquoFault-tolerant control of nonlinear process systems subject tosensor faultsrdquo AIChE Journal vol 53 no 3 pp 654ndash668 2007
[26] M Liu P Shi L Zhang and X Zhao ldquoFault-tolerant controlfor nonlinear Markovian jump systems via proportional andderivative sliding mode observer techniquerdquo IEEE Transactionson Circuits and Systems I Regular Papers vol 58 no 11 pp2755ndash2764 2011
[27] S Li D Sauter C Aubrun and J Yame ldquoStability guaranteedactive fault-tolerant control of networked control systemsrdquoJournal of Control Science and Engineering vol 2008 Article ID189064 9 pages 2008
[28] X Y Luo M J Shang C L Chen and X P Guan ldquoGuaranteedcost active fault-tolerant control of networked control system
with packet dropout and transmission delayrdquo InternationalJournal of Automation and Computing vol 7 no 4 pp 509ndash5152010
[29] Q Zhu B Xie and Y Zhu ldquoGuaranteed Cost Control forMultirate Networked Control Systems with Both Time-Delayand Packet-Dropoutrdquo Mathematical Problems in Engineeringvol 2014 Article ID 637329 9 pages 2014
[30] R Manivannan R Samidurai J Cao and M Perc ldquoDesign ofResilient Reliable Dissipativity Control for Systems with Actu-ator Faults and Probabilistic Time-Delay Signals via Sampled-Data Approachrdquo IEEE Transactions on Systems Man andCybernetics Systems 2018
[31] R Manivannan R Samidurai J Cao A Alsaedi and F EAlsaadi ldquoNon-Fragile Extended Dissipativity Control Designfor Generalized Neural Networks with Interval Time-DelaySignalsrdquo Asian Journal of Control 2019
[32] Q Gao and N Olgac ldquoBounds of imaginary spectra of LTIsystems in the domain of two of the multiple time delaysrdquoAutomatica vol 72 pp 235ndash241 2016
[33] Q Gao A S Kammer U Zalluhoglu and N Olgac ldquoCriticaleffects of the polarity change in delayed states within anLTI dynamics with multiple delaysrdquo Institute of Electrical andElectronics Engineers Transactions onAutomatic Control vol 60no 11 pp 3018ndash3022 2015
[34] Q Gao Z Zhang and C Yang ldquoSign inverting control andits important properties for multiple time-delayed systemsrdquo inProceedings of the 10th ASME Dynamic Systems and ControlConference pp 979ndash984 Virginia USA 2017
[35] Y M Zhang and J Jiang ldquoActive fault-tolerant control systemagainst partial actuator failuresrdquo IEE Proceedings Control13eoryand Applications vol 149 no 1 pp 95ndash104 2002
[36] G Garcia J Bernussou andD Arzelier ldquoRobust stabilization ofdiscrete-time linear systems with norm-bounded time-varyinguncertaintyrdquo Systems amp Control Letters vol 22 no 5 pp 327ndash339 1994
[37] Y Wang L Xie and C E de Souza ldquoRobust control of a classof uncertain nonlinear systemsrdquo Systems amp Control Letters vol19 no 2 pp 139ndash149 1992
[38] D Yue E Tian and Y Zhang ldquoA piecewise analysis methodto stability analysis of linear continuousdiscrete systems withtime-varying delayrdquo International Journal of Robust and Non-linear Control vol 19 no 13 pp 1493ndash1518 2009
[39] X-J Jing D-L Tan and Y-C Wang ldquoAn LMI approach tostability of systems with severe time-delayrdquo IEEE Transactionson Automatic Control vol 49 no 7 pp 1192ndash1195 2004
[40] D Yue Q-L Han and J Lam ldquoNetwork-based robust Hinfincontrol of systems with uncertaintyrdquo Automatica vol 41 no 6pp 999ndash1007 2005
[41] Z Wang F Yang D W C Ho and X Liu ldquoRobust Hinfincontrol for networked systemswith randompacket lossesrdquo IEEETransactions on Systems Man and Cybernetics Part B vol 37no 4 pp 916ndash924 2007
[42] M S Mahmoud ldquoControl of uncertain state-delay systemsguaranteed cost approachrdquo IMA Journal of Mathematical Con-trol and Information vol 18 no 1 pp 109ndash128 2001
[43] D Yue C Peng andG Y Tang ldquoGuaranteed cost control of lin-ear systems over networks with state and input quantisationsrdquoIEE Proceedings Control 13eory and Applications vol 153 no 6pp 658ndash664 2006
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

8 Mathematical Problems in Engineering
Φ1 =
[[[[[[[[[[[[[[[[[[[[
Ξ1 1198771 + [1198802 (119860 + Δ119860)]119879 + 11987211 [1198803 (119860 + Δ119860)]119879 minus 11987311 [1198804 (119860 + Δ119860)]119879lowast minus1198771 + 11987212 + 11987212119879 11987213119879 minus 11987312 11987214119879lowast lowast minus1198773120572 minus 11987312 minus 11987312119879 1198773120572 minus 11987314119879lowast lowast lowast minus1198773120572lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
119875 minus 1198801 + [1198805 (119860 + Δ119860)]119879 Ψ1 + [1198806 (119860 + Δ119860)]119879 [1198807 (119860 + Δ119860)]119879 + [1198808 (119860 + Δ119860)]119879 + 1198801119867 0minus1198802 + 11987215119879 Ψ2 + 11987216119879 1198802119867 + 11987217119879 + 11987218119879 0minus1198803 minus 11987315119879 Ψ3 minus 11987316119879 1198803119867 minus 11987317119879 minus 11987318119879 0
minus1198804 Ψ4 1198804119867 012057811989821198771 + 120572 (1198772 + 1198773) minus 1198805 minus 1198805119879 Ψ5 minus 1198806119879 1198805119867 minus 1198807119879 minus 1198808119879 0
lowast Ψ6 Ξ2 0lowast lowast 1198807119867 + 1198808119867 + (1198807119867)119879 + (1198808119867)119879 0lowast lowast lowast minus1205742119868
]]]]]]]]]]]]]]]]]]]
Ξ1 = minus1198771 + 1198801 (119860 + Δ119860) + [1198801 (119860 + Δ119860)]119879 + 119862119879119862 + 1198781Ξ2 = [1198807 (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 + [1198808 (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 + 1198806119867 minus 11987217119879 minus 11987218119879 + 11987317119879
+ 11987318119879Ψ119894 = 119880119894 (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) + 1198731119894 minus 1198721119894 (119894 = 1 2 3 4 5) Ψ6 = 1198806 (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)
+ [1198806 (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 [Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 1198782Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) minus 11987216 minus 11987216119879 + 11987316+ 11987316119879
(40)
ifΦ1 + (120578 (119905) minus 120578119898) 1198721119877minus12 1198721119879
+ (1205781 minus 120578 (119905)) 1198731119877minus12 1198731119879 lt 0 (41)
Next we need to acquire the inequality (24) through atransformation based on inequality (41) which is equivalentto the following inequalities by applying the theory given inLemma 7 and the Schur complement also used byD Yue [38]in the previous study
[minus (1205781 minus 120578119898)minus1 1198772 1198721119879lowast Φ1 ] lt 0 (42)
[minus (1205781 minus 120578119898)minus1 1198772 1198731119879lowast Φ1 ] lt 0 (43)
Premultiplying and postmultiplying the inequalities above bydiag((1205781 minus 120578119898)119868 119868) we have
[minus1205721198772 Ω1119896lowast Φ1 ] lt 0 (44)
Applying the theory of the Schur complement to inequality(44) we have
[[[[[[[
minus (1198781 + 119862119879119862)minus1 0 0 lowast minus1198782minus1 0 Σlowast lowast minus1205721198772 Ω1119896lowast lowast lowast Φ10158401
]]]]]]]
lt 0 (45)
where
Mathematical Problems in Engineering 9
Φ11015840 =
[[[[[[[[[[[[[[[[[[[[
Ξ11015840 1198771 + [1198802 (119860 + Δ119860)]119879 + 11987211 [1198803 (119860 + Δ119860)]119879 minus 11987311 [1198804 (119860 + Δ119860)]119879lowast minus1198771 + 11987212 + 11987212119879 11987213119879 minus 11987312 11987214119879lowast lowast minus1198773120572 minus 11987312 minus 11987312119879 1198773120572 minus 11987314119879lowast lowast lowast minus1198773120572lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
119875 minus 1198801 + [1198805 (119860 + Δ119860)]119879 Ψ1 + [1198806 (119860 + Δ119860)]119879 [1198807 (119860 + Δ119860)]119879 + [1198808 (119860 + Δ119860)]119879 + 1198801119867 0minus1198802 + 11987215119879 Ψ2 + 11987216119879 1198802119867 + 11987217119879 + 11987218119879 0minus1198803 minus 11987315119879 Ψ3 minus 11987316119879 1198803119867 minus 11987317119879 minus 11987318119879 0minus1198804 Ψ4 1198804119867 0
12057811989821198771 + 120572 (1198772 + 1198773) minus 1198805 minus 1198805119879 Ψ5 minus 1198806119879 1198805119867 minus 1198807119879 minus 1198808119879 0lowast Ψ61015840 Ξ2 0lowast lowast 1198807119867 + 1198808119867 + (1198807119867)119879 + (1198808119867)119879 0lowast lowast lowast minus1205742119868
]]]]]]]]]]]]]]]]
Ξ11015840 = minus1198771 + 1198801 (119860 + Δ119860) + [1198801 (119860 + Δ119860)]119879Ψ61015840 = 1198806 (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) + [1198806 (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 minus 11987216 minus 11987216119879 + 11987316 + 11987316119879
Σ = [0 0 0 0 0 Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) 0 0]
(46)
Inequality (44) can be written as
[[[[[
minus (1198781 + 119862119879119862)minus1 0 0 lowast minus1198782minus1 0 Σlowast lowast minus1205721198772 Ω1119896lowast lowast lowast Φ101584010158401]]]]]
+ [[[[
000119863]]]]
119865 [[[[
000119864119879
]]]]
119879
+ [[[[
000119864119879
]]]]
119865119879[[[[[
000
]]]]]
119879
lt 0(47)
where
Φ110158401015840 =
[[[[[[[[[[[[[[[[[[[[
minus1198771 + 1198801119860 + (1198801119860)119879 1198771 + (1198802119860)119879 + 11987211 (1198803119860)119879 minus 11987311 (1198804119860)119879lowast minus1198771 + 11987212 + 11987212119879 11987213119879 minus 11987312 11987214119879lowast lowast minus1198773120572 minus 11987312 minus 11987312119879 1198773120572 minus 11987314119879lowast lowast lowast minus1198773120572lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
10 Mathematical Problems in Engineering
119875 minus 1198801 + (1198805119860)119879 Ψ110158401015840 + (1198806119860)119879 (1198807119860)119879 + (1198808119860)119879 + 1198801119867 0minus1198802 + 11987215119879 Ψ210158401015840 + 11987216119879 1198802119867 + 11987217119879 + 11987218119879 0minus1198803 minus 11987315119879 Ψ310158401015840 minus 11987316119879 1198803119867 minus 11987317119879 minus 11987318119879 0
minus1198804 Ψ41015840 1198804119867 012057811989821198771 + 120572 (1198772 + 1198773) minus 1198805 minus 1198805119879 Ψ510158401015840 minus 1198806119879 1198805119867 minus 1198807119879 minus 1198808119879 0
lowast Ψ610158401015840 Ξ210158401015840 0lowast lowast 1198807119867 + 1198808119867 + (1198807119867)119879 + (1198808119867)119879 0lowast lowast lowast minus1205742119868
]]]]]]]]]]]]]]]]]]]
Ξ210158401015840 = [1198807119861Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 + [1198808119861Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 + 1198806119867 minus 11987217119879 minus 11987218119879 + 11987317119879 + 11987318119879Ψ11989410158401015840 = 119880119894119861Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) + 1198731119894 minus 1198721119894 (119894 = 1 2 3 4 5)
Ψ61015840 = 1198806119861Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) + [1198806119861Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 minus 11987216 minus 11987216119879 + 11987316 + 11987316119879 = [1198641 0 0 0 0 1198642Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) 0 0]
(48)
With the definition of scalar 120576 gt 0 we apply the theory givenin Lemma 6 to (47) also used by Y Wang and L Xie [37]in which the uncertain matrix 119865 can be eliminated and asufficient condition of (47) is obtained
[[[[[[[
minus (1198781 + 119862119879119862)minus1 0 0 lowast minus1198782minus1 0 Σlowast lowast minus1205721198772 Ω1119896lowast lowast lowast Φ101584010158401
]]]]]]]
+ 120576 [[[[[[
01198630
]]]]]]
[[[[[[
01198630
]]]]]]
119879
+ 120576minus1[[[[[[[
000
119879
]]]]]]]
[[[[[[[
000
119879
]]]]]]]
119879
lt 0
(49)
Applying the Schur complement to inequality (49) we have
[[[[[[[[[[[[[[
minus120576119868 0 0 0 120576119879 0lowast minus (1198781 + 119862119879119862)minus1 0 0 0lowast lowast minus1198782minus1 0 Σ 0lowast lowast lowast minus1205721198772 Ω1119896 0lowast lowast lowast lowast Φ101584010158401 119879lowast lowast lowast lowast lowast minus120576119868
]]]]]]]]]]]]]]
lt 0
(50)
There exists 1205881 gt 0 1205882 gt 0 Based on (17) and Remark 3 inSection 2 we know that 119871119879119871 le 119868 and Γ119879Γ le 119868 According
to expressions (47) (49) and (50) we obviously know that1198805 gt 0 Using Lemma 6 again we have
Θ0 (119868 + Γ) 1198701198660119871 + [Θ0 (119868 + Γ) 1198701198660119871]119879le 1205881minus1Θ0 (119868 + Γ) 11987011986601198805minus1 [Θ0 (119868 + Γ) 1198701198660]119879
+ 12058811198805(51)
and
Θ0Γ1198701198660 + (Θ0Γ1198701198660)119879le 1205882minus1Θ0Θ0119879 + 1205882 (1198701198660)1198791198701198660
(52)
Based on inequalities (51) (52) and the Schur complementwe know inequality (24) is a sufficient condition of inequality(50) while inequality (50) is equivalent to inequality (41)Therefore we can undoubtedly obtain inequality (24) asa sufficient condition of inequality (41) Thus based oninequality (39) and (41) we know(1) if120596(119905) equiv 0 obviously we have V1015840(119905) lt 0 so system (21)is asymptotically stable(2) if 119909(0) equiv 0 we know V(0) = 0 In addition it can beobtained that V(infin) ge 0
Therefore
intinfin0
V1015840 (119905) + 119910119879 (119905) 119910 (119905) minus 1205742120596119879 (119905) 120596 (119905) 119889119905= V (infin) + intinfin
0119910119879 (119905) 119910 (119905) minus 1205742120596119879 (119905) 120596 (119905) 119889119905 lt 0
(53)
Thus
intinfin0
119910119879 (119905) 119910 (119905) lt intinfin0
1205742120596119879 (119905) 120596 (119905) 119889119905 (54)
Mathematical Problems in Engineering 11
Because 120596(119905) isin 1198712[0 infin) we have1003817100381710038171003817119910 (119905)1003817100381710038171003817 le 120574 120596 (119905)119879 (55)
It is known that model (21) is asymptotically stable with the119867infin norm bound 120574Moreover according to (39) and (41) we have
V1015840 (119905) le minus119909119879 (119905) 1198781119909 (119905)minus [Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) 119909 (119905 minus 120578 (119905))]119879
sdot 1198782Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) 119909 (119905 minus 120578 (119905))(56)
Through the integral operation it can be determined that119869 le V(0) In addition by inserting 119905 = 0 into the Lyapunov-Krasovskii function shown as expression (28) the upperbound of cost function 119869 can be obtained and shown asexpression (26) Therefore the theorem is verified if 119897 = 1Case 2 If 120578(119905) isin [1205781 120578119872] weighted technology based on theprinciple of Newton-Leibniz is introduced as follows
2 [120576119879 (119905) 120596119879 (119905)] 1198722 [119909 (119905 minus 1205781) minus 119909 (119905 minus 120578 (119905))minus int119905minus1205781119905minus120578(119905)
1199091015840119879 (119904) 119889119904] = 0(57)
2 [120576119879 (119905) 120596119879 (119905)] 1198732 [119909 (119905 minus 120578 (119905)) minus 119909 (119905 minus 120578119872)minus int119905minus120578(119905)119905minus120578119872
1199091015840119879 (119904) 119889119904] = 0(58)
Because 1198773 gt 0 we have
minus 2 [120576119879 (119905) 120596119879 (119905)] 1198722 int119905minus1205781119905minus120578(119905)
1199091015840 (119904) 119889119904 le (120578 (119905) minus 1205781)sdot [120576119879 (119905) 120596119879 (119905)] 1198722119877minus13 1198722119879 [120576119879 (119905) 120596119879 (119905)]119879+ int119905minus1205781119905minus120578(119905)
1199091015840119879 (119904) 11987731199091015840 (119904) 119889119904(59)
minus 2 [120576119879 (119905) 120596119879 (119905)] 1198732 int119905minus120578(119905)119905minus120578119872
1199091015840 (119904) 119889119904 le (120578119872 minus 120578 (119905))sdot [120576119879 (119905) 120596119879 (119905)] 1198732119877minus13 1198731119879 [120576119879 (119905) 120596119879 (119905)]119879+ int119905minus120578(119905)119905minus120578119872
1199091015840119879 (119904) 11987731199091015840 (119904) 119889119904(60)
Therefore
minus 2 [120576119879 (119905) 120596119879 (119905)] 1198722 int119905minus1205781119905minus120578(119905)
1199091015840 (119904) 119889119904
minus 2 [120576119879 (119905) 120596119879 (119905)] 1198732 int119905minus120578(119905)119905minus120578119872
1199091015840 (119904) 119889119904le (120578 (119905) minus 1205781)sdot [120576119879 (119905) 120596119879 (119905)] 1198722119877minus13 1198722119879 [120576119879 (119905) 120596119879 (119905)]119879+ (120578119872 minus 120578 (119905))sdot [120576119879 (119905) 120596119879 (119905)] 1198732119877minus13 1198732119879 [120576119879 (119905) 120596119879 (119905)]119879
+ int119905minus1205781119905minus120578119872
1199091015840119879 (119904) 11987731199091015840 (119904) 119889119904
(61)
In addition 119910119879(119905)119910(119905)minus1205742120596119879(119905)120596(119905) both on the left and rightsides of equality (29) and 119909119879(119905)1198781119909(119905) + [Θ0(119868 + Γ)1198701198660(119868 +119871)119909(119905minus120578(119905))]1198791198782Θ0(119868+Γ)1198701198660(119868+119871)119909(119905minus120578(119905)) on the right sideof equal sign ldquo=rdquo By inserting (30) (31) (57) (58) and (61)into the obtained inequality the item minus int119905minus1205781
119905minus1205781198721199091015840119879(119904)11987731199091015840(119904)119889119904
can be offset while the item minus int119905minus120578119898119905minus1205781
1199091015840119879(119904)11987721199091015840(119904)119889119904 is offsetin Case 1 Then in the same methods of transformation asCase 1 the inequality (24) when 119897 = 2 can be obtainedTherefore the proof is complete
Remark 9 In the two different cases a variational weightingmatrix and Jessenrsquos inequalities are used to derive the 119867infinguaranteed cost fault-tolerant condition of the system inwhich more delay information is employed to reduce theconservatism
The next section will provide sufficient conditions fordesigning the guaranteed cost fault-tolerant control for adouble-fault NCS
4 Guaranteed Cost Fault-Tolerant Control ofDouble-Fault NCS
Inequality (24) is not linear with respect to the gain matricesof the controller so it is needs to be reformulated into LMIsvia a change of variables
Theorem 10 Given symmetric positive definite matrices 1198781and 1198782 a set of constant 120578119898 120578119872 1205881 gt 0 1205882 gt 0 120582119894 (119894 = from1 to 7) and 120572 = (120578119872 minus 120578119898)2 If there exists a set of symmetricpositive definite matrices 119895 (119895 = 1 2 3)119883 andmatrix gt 0as well as matrices 1120573 2120573 1120573 2120573 (120573 =from 1 to 8)
12 Mathematical Problems in Engineering
119884 and a set of constants 120576 gt 0 and 120583 gt 0 satisfying theLMIs
[[[[[[[[[[[[[[[[[[[[[[[[[[
minus120576119868 0 0 0 120576119863119879lowast minus (1198781 + 119862119879119862)minus1 0 0 Πlowast lowast minus1198782minus1 0 Σlowast lowast lowast minusΓ119897 Ω119897119896lowast lowast lowast lowast Φ119897lowast lowast lowast lowast lowastlowast lowast lowast lowast lowastlowast lowast lowast lowast lowastlowast lowast lowast lowast lowastlowast lowast lowast lowast lowast
0 0 0 0 00 0 0 0 00 Θ0119884 0 Θ0 00 0 0 0 0
119864119879 Θ 119883 Δ 119884119879minus120576119868 1198642Θ0119884 0 1198642Θ0 0lowast minus1205881119883119879 0 0 119884119879lowast lowast minus1205881minus1119883 0 0lowast lowast lowast minus1205882119868 0lowast lowast lowast lowast minus1205882minus1119868
]]]]]]]]]]]]]]]]]]]]]]
lt 0
119897 = 1 2 119896 = 1 2(62)
where
Φ1 =
[[[[[[[[[[[[[[[[[[[[[
minus1 + 1205821119860119883119879 + 1205821119883119860119879 1 + 1205822119883119860119879 + 11 1205823119883119860119879 minus 11 1205824119883119860119879lowast minus1 + 12 + 12119879 13119879 minus 12 14119879lowast lowast minus3120572 minus 12 minus 12119879 3120572 minus 14119879lowast lowast lowast minus3120572lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
minus 1205821119883119879 + 119883119860119879 Ψ1 + 1205825119883119860119879 1205826119883119860119879 + 1205827119883119860119879 + 1205821119867119883119879 0minus1205822119883119879 + 15119879 Ψ2 + 16119879 1205822119867119883119879 + 17119879 + 18119879 0minus1205823119883119879 minus 15119879 Ψ3 minus 16119879 1205823119867119883119879 minus 17119879 minus 18119879 0
minus1205824119883119879 Ψ4 1205824119867119883119879 012057811989821 + 120572 (2 + 3) minus 119883119879 minus 119883 Ψ5 minus 1205825119883 119867119883119879 minus 1205826119883 minus 1205827119883 0
lowast Ψ6 Ξ 0lowast lowast 1205826119867119883119879 + 1205827119867119883119879 + 1205826119883119867119879 + 1205827119883119867119879 0lowast lowast lowast minus120583119868
]]]]]]]]]]]]]]]]]
Φ2 =
[[[[[[[[[[[[[[[[[[[[[
minus1 + 1205821119860119883119879 + 1205821119883119860119879 1 + 1205822119883119860119879 1205823119883119860119879 + 21 1205824119883119860119879 minus 21lowast minus1 minus 2120572 2120572 + 22 minus22lowast lowast minus2120572 + 23 + 23119879 24119879 minus 23lowast lowast lowast minus24 minus 24119879lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
Mathematical Problems in Engineering 13
minus 1205821119883119879 + 119883119860119879 Ψ11015840 + 1205825119883119860119879 1205826119883119860119879 + 1205827119883119860119879 + 1205821119867119883119879 0minus1205822119883119879 Ψ21015840 1205822119867119883119879 0
minus1205823119883119879 + 25119879 Ψ31015840 + 26119879 1205823119867119883119879 + 27119879 + 28119879 0minus1205824119883119879 minus 25119879 Ψ41015840 minus 26119879 1205824119867119883119879 minus 27119879 minus 28119879 0
12057811989821 + 120572 (2 + 3) minus 119883 minus 119883119879 Ψ51015840 minus 1205825119883 119867119883119879 minus 1205826119883 minus 1205827119883 0lowast Ψ61015840 Ξ1015840 0lowast lowast 1205826119867119883119879 + 1205827119867119883119879 + 1205826119883119867119879 + 1205827119883119867119879 0lowast lowast lowast minus120583119868
]]]]]]]]]]]]]]]]]]]]]
Γ1 = 1205721198772Γ1 = 1205722Γ2 = 1205723
Ω11 = 1205721119879Ω12 = 1205721119879Ω21 = 1205722119879Ω22 = 1205722119879
1119879 = [11119879 12119879 13119879 14119879 15119879 16119879 17119879 18119879] 2119879 = [21119879 22119879 23119879 24119879 25119879 26119879 27119879 28119879]
1119879 = [11119879 12119879 13119879 14119879 15119879 16119879 17119879 18119879] 1198732119879 = [21119879 22119879 23119879 24119879 25119879 26119879 27119879 28119879]
Ξ = 1205826 (119861Θ0119884)119879 + 1205827 (119861Θ0119884)119879 + 1205825119867119883119879 minus 17119879 minus 18119879 + 17119879 + 18119879Ψ119894 = 120582119894119861Θ0119884 + 1119894 minus 1119894 (119894 = 1 2 3 4)
Ψ5 = 119861Θ0119884 + 1119894 minus 1119894Ψ6 = 1205825119861Θ0119884 + 1205825 (119861Θ0119884)119879 minus 11987216 minus 11987216119879 + 11987316 + 11987316119879
Ξ1015840 = 1205826 (119861Θ0119884)119879 + 1205827 (119861Θ0119884)119879 + 1205825119867119883119879 minus 27119879 minus 28119879 + 27119879 + 28119879Ψ1198941015840 = 120582119894119861Θ0119884 + 2119894 minus 2119894 (119894 = 1 2 3 4)
Ψ51015840 = 119861Θ0119884 + 2119894 minus 2119894Ψ61015840 = 1205825119861Θ0119884 + 1205825 (119861Θ0119884)119879 minus 26 minus 26119879 + 26 + 26119879
119863 = [1205821119863119879 1205822119863119879 1205823119863119879 1205824119863119879 119863119879 1205825119863119879 1205826119863119879 + 1205827119863119879 0]119879 119864 = [1198641119883119879 0 0 0 0 1198642Θ0119884 0 0]
119883 = [0 0 0 0 0 119883119879 0 0]119879 Π = [119883119879 0 0 0 0 0 0 0]
14 Mathematical Problems in Engineering
Θ = [(1205821119861Θ0119884)119879 (1205822119861Θ0119884)119879 (1205823119861Θ0119884)119879 (1205824119861Θ0119884)119879 (119861Θ0119884)119879 (1205825119861Θ0119884)119879 (1205826119861119884)119879 + (1205827119861119884)119879 0]119879 Δ = [(1205821119861Θ0)119879 (1205822119861Θ0)119879 (1205823119861Θ0)119879 (1205824119861Θ0)119879 (119861Θ0)119879 (1205825119861Θ0)119879 (1205826119861Θ0)119879 + (1205827119861Θ0)119879 0]119879
119884 = [0 0 0 0 0 119884 0 0] Σ = [0 0 0 0 0 Θ0119884 0 0]
(63)
then the 119867infin guaranteed cost control gain 119870 = 119884119883minus1198791198660minus1 canrendermodel (21) to be asymptotically stable with the119867infin normbound 120574 = radic120583 13e upper bound 1198690 of cost function 119869 is givenas
1198690 = 119909119879 (0) 119883minus1119883minus119879119909 (0)+ 120578119898 int0
minus120578119898
int0119904
1199091015840119879 (120591) 119883minus11119883minus1198791199091015840 (120591) 119889119904119889120591+ intminus120578119898minus1205781
int0119904
1199091015840119879 (120591) 119883minus12119883minus1198791199091015840 (120591) 119889119904119889120591+ intminus1205781minus120578119872
int0119904
1199091015840119879 (120591) 119883minus13119883minus1198791199091015840 (120591) 119889119904119889120591
(64)
Proof The proof is based on a suitable transformation anda change of variables allowing us to obtain inequality (24)in Theorem 8 First we define 1198805 = 1198800 119880119894 = 1205821198941198800 (119894 =from 1 to 4) 1198806 = 12058251198800 in (24) Because we consider thedimension of state119909is equal to that of outside disturbance120596 in this paper we can also define 1198807 = 12058261198800 1198808 =12058271198800 Obviously (24) implies 1198805 gt 0 so 1198800 is nonsingularThen using the analysis method of D Yue [40] and Z Wang[41] pre- and postmultiplying both sides of inequality (24)with diag(119868 119868 119868 119883 119868 119883 119868 119868 119868) and its transpose where = diag(119883 119883 119883 119883 119883 119883 119883 119883) and 119883 = 1198800minus1 introducingnew variables 119883119875119883119879 = 119883119877119895119883119879 = 119895 (119895 = 1 2 3)119883119872119897120573119883119879 = 119897120573 119883119873119897120573119883119879 = 119897120573 (119897 = 1 2 120573 = 1 2 sdot sdot sdot 8)1198701198660119883119879 = 119884 and 120583 = 1205742 From the definition of 1198660 we know1198660 is invertible so 119870 can be obtained by calculating 119870 =119884119883minus1198791198660minus1 It is easy to see that 10 and (64) respectively imply(24) and (26) Therefore from Theorem 8 we can completethe proof
To obtain the optimal bound 119869lowast shown in (26) thecommonly used method is to consider it as an optimizationproblem like [42] in which the expression of initial state 119909(119905)(119905 isin [minus120578119872 0]) needs to be known The expression of initialstate is not given in this paper Therefore the optimizationmethod used in [42] cannot be used here A practical methodto obtain 119869lowast also used by D Yue [43] is employed as follows
Suppose 1199091015840(119905) is bounded if 119905 isin [minus120578119872 0] and satisfying1199091015840119879(120591)1199091015840(120591) le ℓ In addition suppose that there exists 120573119894 gt0 (119894 = 1 2 3) satisfying119883minus1119894119883minus119879 le 120573119894119868 119894 = 1 2 3119883minus1119883minus119879 le 1205734119868 (65)
Inserting this into (64) we have
1198690 le 1205734119909119879 (0) 119909 (0) + 05ℓ12057311205781198983 + 05ℓ1205732 (12057812 minus 1205781198982)+ 05ℓ1205733 (1205781198722 minus 12057812) = 119869lowast (66)
Applying the Schur complement to the inequalities above wehave
[minus120573119894119868 119883minus1lowast minus119877119894minus1] lt 0 119894 = 1 2 3
[minus1205734119868 119883minus1lowast minus119875minus1] lt 0
(67)
Then combining 10 and (67) 119894minus1 119894 (119894 = 1 2 3)minus1 119883minus1 119883 exist simultaneously We cannot directly usethe LMI tools to solve the problem Defining 119894minus1 = 119894(119894 = 1 2 3) minus1 = 119883minus1 = and using the idea of thecone complementary linearization algorithm the guaranteedcost fault-tolerant controller of system (21) and the value ofoptimal performance indicator 119869lowast can be obtained in thefollowing method
Minimize 119905119903119886119888119890 (11 + 22 + 33 + + )+ 1205734 + 0512057311205781198983 + 051205732 (12057812 minus 1205781198982)+ 051205733 (1205781198722 minus 12057812)
Subject to 119868119899119890119902119906119886119897119894119905119894119890119904 (62) [minus120573119894119868
lowast minus119894] lt 0 (119894 = 1 2 3)
[minus1205734119868 lowast minus] lt 0
[119883 119868lowast ] ge 0
[1 119868lowast 1] ge 0
[2 119868lowast 2] ge 0
Mathematical Problems in Engineering 15
[3 119868lowast 3] ge 0
[ 119868lowast ] ge 0
119894 gt 0 (119894 = 1 2 3) (68)
5 Simulations
Example 11 Consider inverted pendulum model that canusually be modelled as (1) and the system parameters aregiven as follows
119860 = [minus2 1110 4 ]
119861 = [01minus4]
119862 = [minus03151 01011 03]
119867 = [015 minus056minus01 032 ]
Δ119860 = [004 sin 119905 015 sin 119905minus02 sin 119905 075 sin 119905]
Δ119861 = [002 sin 119905minus01 sin 119905]
119863 = [ 01minus05]
119865 (119905) = sin 119905
(69)
Therefore we have
1198641 = [04 15] 1198642 = 02 (70)
For this simulation the initial state of system is assumed119909(0) = [2 minus1]119879 and the external disturbance is considered as120596(119905) = [015 minus05]119879 3119904 le 119905 le 4119904
0 119900119905ℎ119890119903119904 Here we take the upper
bound of time-varying delay as 120578119872 = 03119904 and its lower boundas 120578119898 = 0119904 namely 0 le 120578(119905) le 03 In addition the faultbounds of the system are given in Table 1
Table 1 The bounds of faults
Symbol Upper bound Lower boundActuatorfaultsΘ 136 009
SensorFaults119866
[[
165 00 175]
][[
0 00 015]
]
minus01
0
01
02
03
04
05
Del
ay
1 2 3 4 5 60Time s
Figure 2 The time-varying delay in double-fault NCS
We choose the parameters as follows
1205821 = 011205822 = 0151205823 = minus0641205824 = 031205825 = 1205826 = 0351205827 = 181198782 = 0311205881 = 30001205882 = 22032ℓ = 1
1198781 = [10013 00 9207]
(71)
By taking advantage of the LMI tool box and inserting theabove parameters into inequalities 10 and (68) we can obtainthe 119867infin guaranteed cost control gain
119870 = 119884119883minus1198791198660minus1 = [85163 151398] (72)
with 120574 = radic120583 = 1952516The corresponding optimal performance indicator (the
upper bound value of guaranteed cost function) is 119869lowast =83162563The time-varying delay is shown in Figure 2 In Figure 3
(a) is the actuator fault which is a piecewise-linear function
16 Mathematical Problems in Engineering
002040608
1121416
Actu
ator
faul
t
1 2 3 4 5 60Time s
(a) Time-varying actuator fault
minus020
02040608
112141618
Sens
or fa
ult
1 2 3 4 5 60Time s
(b) Time-varying sensor fault
Figure 3 The time-varying faults
x1
x2
1 2 3 4 5 60Time s
minus15
minus1
minus05
0
05
1
15
2
Stat
e X
Figure 4 The state response curve of double-fault NCS
1 2 3 4 5 60Time s
minus8minus7minus6minus5minus4minus3minus2minus1
012
Con
trol i
nput
Figure 5 The control input of double-fault NCS
It keeps the minimum value from 13119904 to 17119904 while it keepsthe maximum value from 37119904 to 43119904 The sensor faults areshown as (b) which is sinusoidal It should be noted thatthe green dotted line represents the fault of sensor 1 whilethe blue solid line represents the fault of sensor 2 Throughthe state response of the double-fault NCS shown in Figure 4and corresponding control signal shown in Figure 5 we know
x1
x2
1 2 3 4 5 60Time s
minus8
minus6
minus4
minus2
0
2
4
6
Stat
e X
Figure 6 The state response curve of double-fault NCS
the 119867infin guaranteed cost controller designed in this paper isable to make the double-fault NCS asymptotically stable Thesystem gets preliminarily steady at 2119904 and its state can returnto the equilibrium position in a certain period of time whenthe NCS is affected by external disturbance Compared withthe state response of worse stability shown in Figure 6 whenthe method proposed in [28] is used for this double-faultproblem it sufficiently proves the effectiveness and feasibilityof the method proposed in this paper
To better illustrate the effectiveness of the method pro-posed in this paper the following example is presented
Example 12 Consider the parameters of system (1) as follows
119860 = [[[[[[
021 0 035 10 minus53 minus586 323
365 minus11 minus156 minus0890 0 minus158 minus285
]]]]]]
119861 = [559 12 minus089 13]119879 119862 = [17 02 015 minus018]
Mathematical Problems in Engineering 17
minus15
minus1
minus05
0
05
1
15
Stat
e X1 2 3 4 5 6 7 8 9 100
Time s
R1R2
R3R4
Figure 7 The state response curve of double-fault NCS
Δ119860 = [[[[
082 sin 119905 0 0 00 012 sin 119905 0 00 0 minus058 sin 119905 00 0 0 101 sin 119905]]]]
Δ119861 = [[[[
minus015 sin 119905008 sin 1199050minus028 sin 119905]]]]
119867 = [[[[
minus041 096 052 0006 minus057 0 021121 0 059 0minus032 minus011 minus035 minus003]]]]
119863 = 1198684times4119865 (119905) = diag (sin 119905 sin 119905 sin 119905 sin 119905)
(73)
Therefore we have
1198641 = diag (082 012 minus058 101) 1198642 = [minus015 008 0 minus028]119879 (74)
For this simulation the initial state of system is assumedas 119909(0) = [121 minus051 023 minus018]119879 and the externaldisturbance is considered as
120596 (119905) = [015 cos 119905 015 cos 119905 minus012 sin 119905 minus025 cos 119905]119879 6119904 le 119905 le 81199040 119900119905ℎ119890119903119904 (75)
The uncertain time-varying delay satisfies 0 le 120578(119905) le023119904 In addition the fault bounds of the system are givenin Table 2 Other parameters are selected as follows
1205821 = 121205822 = minus2031205823 = 1681205824 = minus231205825 = minus1051205826 = 6051205827 = 5121198781 = diag (19888 15634 8709 12876) 1198782 = 586
1205881 = 57981205882 = 1879ℓ = 1
(76)
By taking advantage of the LMI tool box and submittingthese parameters above into inequalities 10 and (68) we canobtain the 119867infin guaranteed cost control gain
119870 = 119884119883minus1198791198660minus1= [minus17256 15512 minus08571 07451]
with 120574 = radic120583 = 5819806(77)
The corresponding optimal performance indicator is 119869lowast =65021047 From the state response shown in Figure 7 andcontrol signal shown in Figure 8 we undoubtedly know
18 Mathematical Problems in Engineering
Table 2 The bounds of faults
Symbol Upper bound Lower boundActuatorfaultsΘ 150 012
SensorFaults119866
[[[[[[[[
185 0 0 00 160 0 00 0 125 00 0 0 165
]]]]]]]]
[[[[[[[[
025 0 0 00 0 0 00 0 0 00 0 0 015
]]]]]]]]
minus4
minus3
minus2
minus1
0
1
2
Con
trol i
nput
1 2 3 4 5 6 7 8 9 100Time s
Figure 8 The control input of double-fault NCS
the double-fault NCS is asymptotically stable when the 119867infinguaranteed cost controller is used This further demonstratesthe feasibility and effectiveness of the method proposed inthis paper
6 Conclusions
The issues of modelling and 119867infin guaranteed cost fault-tolerant control of double-fault networked control systemshave been addressedThe closed-loopmodel of a double-faultNCS is set up with regard to the influences of transmissiondelay packet dropout uncertain parameters and externaldisturbance In addition the piecewise delay method is pro-posed to reduce the conservatism when analysing the delay-dependent faulty system With the help of Lee Y Srsquos lemmathe sufficient condition of guaranteed cost fault-tolerantfor time-varying double-fault NCS is introduced using theLyapunov-Krasovskii theory and weighted technology Themethod of designing a guaranteed cost fault-tolerant con-troller for this NCS is given based on LMI Our next researchtask will be choosing more reasonable values of parameters120582119894 (119894 = 1 2 3 4 5 6 7) to reduce the conservatism further Ofcourse the study on scheduling policy of double-fault NCS isalso a challenge but indispensable work
Data Availability
The data used in this paper can be got by simulations
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was partly supported by National Nature Sci-ence Foundation of China under Grants 51875380 51375323and 61563022 Cooperative Innovation Fund-Prospective ofJiangsu Province under Grant BY2016044-01Major Programof Natural Science Foundation of Jiangxi Province Chinaunder Grant 20152ACB20009 High Level Talents of ldquoSix Tal-ent Peaksrdquo in Jiangsu Province China under Grant DZXX-046
References
[1] H Zhang Y Shi J Wang and H Chen ldquoA New Delay-compensation Scheme for Networked Control Systems inController Area Networksrdquo IEEE Transactions on IndustrialElectronics vol 65 no 9 pp 7239ndash7247 2018
[2] A Da Silva and C Kawan ldquoRobustness of critical bit rates forpractical stabilization of networked control systemsrdquo Automat-ica vol 93 pp 397ndash406 2018
[3] Q Zhu K Lu and Y Zhu ldquoGuaranteed cost control ofnetworked control systems under transmission control protocolwith active queue managementrdquo Asian Journal of Control vol18 no 4 pp 1546ndash1557 2016
[4] Q Zhu K Lu and Y Zhu ldquoHinfin Guaranteed Cost Control forNetworked Control Systems under Scheduling Policy Based onPredicted Errorrdquo Mathematical Problems in Engineering vol2014 Article ID 586029 12 pages 2014
[5] W H Chen J X Xu and Z H Guan ldquoGuaranteed cost controlfor uncertain Markovian jump systems with mode-dependenttime-delaysrdquo IEEE Transactions on Automatic Control vol 48no 12 pp 2270ndash2277 2003
[6] HM Soliman A DabroumM S Mahmoud andM SolimanldquoGuaranteed-cost reliable control with regional pole placementof a power systemrdquo Journal of 13e Franklin Institute vol 348no 5 pp 884ndash898 2011
[7] X Li and X-B Wu ldquoGuaranteed cost fault-tolerant controllerdesign of networked control systems under variable-periodsamplingrdquo Information Technology Journal vol 8 no 4 pp 537ndash543 2009
[8] L Zhang and G Orosz ldquoMotif-Based Design for ConnectedVehicle Systems in Presence of Heterogeneous ConnectivityStructures and Time Delaysrdquo IEEE Transactions on IntelligentTransportation Systems vol 17 no 6 pp 1638ndash1651 2016
[9] Z Li G Guo and Z Liu ldquoCommunication parameter designfor networked control systems with the slotted ALOHA accessprotocolrdquo Information Sciences vol 447 pp 205ndash215 2018
[10] K Lu G Jing and L Wang ldquoDistributed algorithm for solv-ing convex inequalitiesrdquo Institute of Electrical and ElectronicsEngineers Transactions on Automatic Control vol 63 no 8 pp2670ndash2677 2018
[11] Q Zhu K Lu and Y Zhu ldquoObserver-based feedback controlof networked control systems with delays and packet dropoutsrdquoJournal of Dynamic SystemsMeasurement andControl vol 138no 2 pp 1ndash8 2016
Mathematical Problems in Engineering 19
[12] Y Li H Li and W Sun ldquoEvent-triggered control for robust setstabilization of logical control networksrdquo Automatica vol 95pp 556ndash560 2018
[13] X Luan P Shi and F Liu ldquoStabilization of networked controlsystems with random delaysrdquo IEEE Transactions on IndustrialElectronics vol 58 no 9 pp 4323ndash4330 2011
[14] Y Zhang and J Jiang ldquoBibliographical review on reconfigurablefault-tolerant control systemsrdquo Annual Reviews in Control vol32 no 2 pp 229ndash252 2008
[15] N H Ei-Farra A Gani and P D Christofides ldquoFault-tolerantcontrol of process systems using communication networksrdquoAIChE Journal vol 51 no 6 pp 1665ndash1682 2005
[16] H R Karimi and H Gao ldquoNew delay-dependent exponentialHinfin synchronization for uncertain neural networks withmixedtime delaysrdquo IEEE Transactions on Systems Man and Cybernet-ics Part B Cybernetics vol 40 no 1 pp 173ndash185 2010
[17] Y N Guo Q Y Zhang D W Gong and J H Zhang ldquoRobustfault-tolerant control of networked control systems with time-varying delaysrdquoControl andDecision vol 23 no 6 pp 689ndash6922008
[18] Z Mao and B Jiang ldquoFault identification and fault-tolerantcontrol for a class of networked control systemsrdquo InternationalJournal of Innovative Computing Information and Control vol3 no 5 pp 1121ndash1130 2007
[19] C-X Yang Z-H Guan and J Huang ldquoStochastic fault tolerantcontrol of networked control systemsrdquo Journal of 13e FranklinInstitute vol 346 no 10 pp 1006ndash1020 2009
[20] Z Mao Y Pan B Jiang and W Chen ldquoFault Detectionfor a Class of Nonlinear Networked Control Systems withCommunication Constraintsrdquo International Journal of ControlAutomation and Systems vol 16 no 1 pp 256ndash264 2018
[21] A Qiu J Gu C Wen and J Zhang ldquoSelf-triggered faultestimation and fault tolerant control for networked controlsystemsrdquo Neurocomputing vol 272 no 1 pp 629ndash637 2018
[22] Q Zhu K Lu G Xie and Y Zhu ldquoGuaranteed Cost Fault-Tolerant Control for Networked Control Systems with SensorFaultsrdquoMathematical Problems in Engineering vol 2015 ArticleID 549347 9 pages 2015
[23] W Wu and Y Zhang ldquoEvent-triggered fault-tolerant controland scheduling codesign for nonlinear networked control sys-tems with medium-access constraint and packet disorderingrdquoInternational Journal of Robust and Nonlinear Control vol 28no 4 pp 1182ndash1198 2018
[24] X Xiao and X-J Li ldquoAdaptive dynamic programming method-based synchronisation control of a class of complex dynamicalnetworks with unknown dynamics and actuator faultsrdquo IETControl 13eory amp Applications vol 12 no 2 pp 291ndash298 2018
[25] PMhaskar AGani CMcFall PDChristofides and J FDavisldquoFault-tolerant control of nonlinear process systems subject tosensor faultsrdquo AIChE Journal vol 53 no 3 pp 654ndash668 2007
[26] M Liu P Shi L Zhang and X Zhao ldquoFault-tolerant controlfor nonlinear Markovian jump systems via proportional andderivative sliding mode observer techniquerdquo IEEE Transactionson Circuits and Systems I Regular Papers vol 58 no 11 pp2755ndash2764 2011
[27] S Li D Sauter C Aubrun and J Yame ldquoStability guaranteedactive fault-tolerant control of networked control systemsrdquoJournal of Control Science and Engineering vol 2008 Article ID189064 9 pages 2008
[28] X Y Luo M J Shang C L Chen and X P Guan ldquoGuaranteedcost active fault-tolerant control of networked control system
with packet dropout and transmission delayrdquo InternationalJournal of Automation and Computing vol 7 no 4 pp 509ndash5152010
[29] Q Zhu B Xie and Y Zhu ldquoGuaranteed Cost Control forMultirate Networked Control Systems with Both Time-Delayand Packet-Dropoutrdquo Mathematical Problems in Engineeringvol 2014 Article ID 637329 9 pages 2014
[30] R Manivannan R Samidurai J Cao and M Perc ldquoDesign ofResilient Reliable Dissipativity Control for Systems with Actu-ator Faults and Probabilistic Time-Delay Signals via Sampled-Data Approachrdquo IEEE Transactions on Systems Man andCybernetics Systems 2018
[31] R Manivannan R Samidurai J Cao A Alsaedi and F EAlsaadi ldquoNon-Fragile Extended Dissipativity Control Designfor Generalized Neural Networks with Interval Time-DelaySignalsrdquo Asian Journal of Control 2019
[32] Q Gao and N Olgac ldquoBounds of imaginary spectra of LTIsystems in the domain of two of the multiple time delaysrdquoAutomatica vol 72 pp 235ndash241 2016
[33] Q Gao A S Kammer U Zalluhoglu and N Olgac ldquoCriticaleffects of the polarity change in delayed states within anLTI dynamics with multiple delaysrdquo Institute of Electrical andElectronics Engineers Transactions onAutomatic Control vol 60no 11 pp 3018ndash3022 2015
[34] Q Gao Z Zhang and C Yang ldquoSign inverting control andits important properties for multiple time-delayed systemsrdquo inProceedings of the 10th ASME Dynamic Systems and ControlConference pp 979ndash984 Virginia USA 2017
[35] Y M Zhang and J Jiang ldquoActive fault-tolerant control systemagainst partial actuator failuresrdquo IEE Proceedings Control13eoryand Applications vol 149 no 1 pp 95ndash104 2002
[36] G Garcia J Bernussou andD Arzelier ldquoRobust stabilization ofdiscrete-time linear systems with norm-bounded time-varyinguncertaintyrdquo Systems amp Control Letters vol 22 no 5 pp 327ndash339 1994
[37] Y Wang L Xie and C E de Souza ldquoRobust control of a classof uncertain nonlinear systemsrdquo Systems amp Control Letters vol19 no 2 pp 139ndash149 1992
[38] D Yue E Tian and Y Zhang ldquoA piecewise analysis methodto stability analysis of linear continuousdiscrete systems withtime-varying delayrdquo International Journal of Robust and Non-linear Control vol 19 no 13 pp 1493ndash1518 2009
[39] X-J Jing D-L Tan and Y-C Wang ldquoAn LMI approach tostability of systems with severe time-delayrdquo IEEE Transactionson Automatic Control vol 49 no 7 pp 1192ndash1195 2004
[40] D Yue Q-L Han and J Lam ldquoNetwork-based robust Hinfincontrol of systems with uncertaintyrdquo Automatica vol 41 no 6pp 999ndash1007 2005
[41] Z Wang F Yang D W C Ho and X Liu ldquoRobust Hinfincontrol for networked systemswith randompacket lossesrdquo IEEETransactions on Systems Man and Cybernetics Part B vol 37no 4 pp 916ndash924 2007
[42] M S Mahmoud ldquoControl of uncertain state-delay systemsguaranteed cost approachrdquo IMA Journal of Mathematical Con-trol and Information vol 18 no 1 pp 109ndash128 2001
[43] D Yue C Peng andG Y Tang ldquoGuaranteed cost control of lin-ear systems over networks with state and input quantisationsrdquoIEE Proceedings Control 13eory and Applications vol 153 no 6pp 658ndash664 2006
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Mathematical Problems in Engineering 9
Φ11015840 =
[[[[[[[[[[[[[[[[[[[[
Ξ11015840 1198771 + [1198802 (119860 + Δ119860)]119879 + 11987211 [1198803 (119860 + Δ119860)]119879 minus 11987311 [1198804 (119860 + Δ119860)]119879lowast minus1198771 + 11987212 + 11987212119879 11987213119879 minus 11987312 11987214119879lowast lowast minus1198773120572 minus 11987312 minus 11987312119879 1198773120572 minus 11987314119879lowast lowast lowast minus1198773120572lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
119875 minus 1198801 + [1198805 (119860 + Δ119860)]119879 Ψ1 + [1198806 (119860 + Δ119860)]119879 [1198807 (119860 + Δ119860)]119879 + [1198808 (119860 + Δ119860)]119879 + 1198801119867 0minus1198802 + 11987215119879 Ψ2 + 11987216119879 1198802119867 + 11987217119879 + 11987218119879 0minus1198803 minus 11987315119879 Ψ3 minus 11987316119879 1198803119867 minus 11987317119879 minus 11987318119879 0minus1198804 Ψ4 1198804119867 0
12057811989821198771 + 120572 (1198772 + 1198773) minus 1198805 minus 1198805119879 Ψ5 minus 1198806119879 1198805119867 minus 1198807119879 minus 1198808119879 0lowast Ψ61015840 Ξ2 0lowast lowast 1198807119867 + 1198808119867 + (1198807119867)119879 + (1198808119867)119879 0lowast lowast lowast minus1205742119868
]]]]]]]]]]]]]]]]
Ξ11015840 = minus1198771 + 1198801 (119860 + Δ119860) + [1198801 (119860 + Δ119860)]119879Ψ61015840 = 1198806 (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) + [1198806 (119861 + Δ119861) Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 minus 11987216 minus 11987216119879 + 11987316 + 11987316119879
Σ = [0 0 0 0 0 Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) 0 0]
(46)
Inequality (44) can be written as
[[[[[
minus (1198781 + 119862119879119862)minus1 0 0 lowast minus1198782minus1 0 Σlowast lowast minus1205721198772 Ω1119896lowast lowast lowast Φ101584010158401]]]]]
+ [[[[
000119863]]]]
119865 [[[[
000119864119879
]]]]
119879
+ [[[[
000119864119879
]]]]
119865119879[[[[[
000
]]]]]
119879
lt 0(47)
where
Φ110158401015840 =
[[[[[[[[[[[[[[[[[[[[
minus1198771 + 1198801119860 + (1198801119860)119879 1198771 + (1198802119860)119879 + 11987211 (1198803119860)119879 minus 11987311 (1198804119860)119879lowast minus1198771 + 11987212 + 11987212119879 11987213119879 minus 11987312 11987214119879lowast lowast minus1198773120572 minus 11987312 minus 11987312119879 1198773120572 minus 11987314119879lowast lowast lowast minus1198773120572lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
10 Mathematical Problems in Engineering
119875 minus 1198801 + (1198805119860)119879 Ψ110158401015840 + (1198806119860)119879 (1198807119860)119879 + (1198808119860)119879 + 1198801119867 0minus1198802 + 11987215119879 Ψ210158401015840 + 11987216119879 1198802119867 + 11987217119879 + 11987218119879 0minus1198803 minus 11987315119879 Ψ310158401015840 minus 11987316119879 1198803119867 minus 11987317119879 minus 11987318119879 0
minus1198804 Ψ41015840 1198804119867 012057811989821198771 + 120572 (1198772 + 1198773) minus 1198805 minus 1198805119879 Ψ510158401015840 minus 1198806119879 1198805119867 minus 1198807119879 minus 1198808119879 0
lowast Ψ610158401015840 Ξ210158401015840 0lowast lowast 1198807119867 + 1198808119867 + (1198807119867)119879 + (1198808119867)119879 0lowast lowast lowast minus1205742119868
]]]]]]]]]]]]]]]]]]]
Ξ210158401015840 = [1198807119861Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 + [1198808119861Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 + 1198806119867 minus 11987217119879 minus 11987218119879 + 11987317119879 + 11987318119879Ψ11989410158401015840 = 119880119894119861Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) + 1198731119894 minus 1198721119894 (119894 = 1 2 3 4 5)
Ψ61015840 = 1198806119861Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) + [1198806119861Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 minus 11987216 minus 11987216119879 + 11987316 + 11987316119879 = [1198641 0 0 0 0 1198642Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) 0 0]
(48)
With the definition of scalar 120576 gt 0 we apply the theory givenin Lemma 6 to (47) also used by Y Wang and L Xie [37]in which the uncertain matrix 119865 can be eliminated and asufficient condition of (47) is obtained
[[[[[[[
minus (1198781 + 119862119879119862)minus1 0 0 lowast minus1198782minus1 0 Σlowast lowast minus1205721198772 Ω1119896lowast lowast lowast Φ101584010158401
]]]]]]]
+ 120576 [[[[[[
01198630
]]]]]]
[[[[[[
01198630
]]]]]]
119879
+ 120576minus1[[[[[[[
000
119879
]]]]]]]
[[[[[[[
000
119879
]]]]]]]
119879
lt 0
(49)
Applying the Schur complement to inequality (49) we have
[[[[[[[[[[[[[[
minus120576119868 0 0 0 120576119879 0lowast minus (1198781 + 119862119879119862)minus1 0 0 0lowast lowast minus1198782minus1 0 Σ 0lowast lowast lowast minus1205721198772 Ω1119896 0lowast lowast lowast lowast Φ101584010158401 119879lowast lowast lowast lowast lowast minus120576119868
]]]]]]]]]]]]]]
lt 0
(50)
There exists 1205881 gt 0 1205882 gt 0 Based on (17) and Remark 3 inSection 2 we know that 119871119879119871 le 119868 and Γ119879Γ le 119868 According
to expressions (47) (49) and (50) we obviously know that1198805 gt 0 Using Lemma 6 again we have
Θ0 (119868 + Γ) 1198701198660119871 + [Θ0 (119868 + Γ) 1198701198660119871]119879le 1205881minus1Θ0 (119868 + Γ) 11987011986601198805minus1 [Θ0 (119868 + Γ) 1198701198660]119879
+ 12058811198805(51)
and
Θ0Γ1198701198660 + (Θ0Γ1198701198660)119879le 1205882minus1Θ0Θ0119879 + 1205882 (1198701198660)1198791198701198660
(52)
Based on inequalities (51) (52) and the Schur complementwe know inequality (24) is a sufficient condition of inequality(50) while inequality (50) is equivalent to inequality (41)Therefore we can undoubtedly obtain inequality (24) asa sufficient condition of inequality (41) Thus based oninequality (39) and (41) we know(1) if120596(119905) equiv 0 obviously we have V1015840(119905) lt 0 so system (21)is asymptotically stable(2) if 119909(0) equiv 0 we know V(0) = 0 In addition it can beobtained that V(infin) ge 0
Therefore
intinfin0
V1015840 (119905) + 119910119879 (119905) 119910 (119905) minus 1205742120596119879 (119905) 120596 (119905) 119889119905= V (infin) + intinfin
0119910119879 (119905) 119910 (119905) minus 1205742120596119879 (119905) 120596 (119905) 119889119905 lt 0
(53)
Thus
intinfin0
119910119879 (119905) 119910 (119905) lt intinfin0
1205742120596119879 (119905) 120596 (119905) 119889119905 (54)
Mathematical Problems in Engineering 11
Because 120596(119905) isin 1198712[0 infin) we have1003817100381710038171003817119910 (119905)1003817100381710038171003817 le 120574 120596 (119905)119879 (55)
It is known that model (21) is asymptotically stable with the119867infin norm bound 120574Moreover according to (39) and (41) we have
V1015840 (119905) le minus119909119879 (119905) 1198781119909 (119905)minus [Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) 119909 (119905 minus 120578 (119905))]119879
sdot 1198782Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) 119909 (119905 minus 120578 (119905))(56)
Through the integral operation it can be determined that119869 le V(0) In addition by inserting 119905 = 0 into the Lyapunov-Krasovskii function shown as expression (28) the upperbound of cost function 119869 can be obtained and shown asexpression (26) Therefore the theorem is verified if 119897 = 1Case 2 If 120578(119905) isin [1205781 120578119872] weighted technology based on theprinciple of Newton-Leibniz is introduced as follows
2 [120576119879 (119905) 120596119879 (119905)] 1198722 [119909 (119905 minus 1205781) minus 119909 (119905 minus 120578 (119905))minus int119905minus1205781119905minus120578(119905)
1199091015840119879 (119904) 119889119904] = 0(57)
2 [120576119879 (119905) 120596119879 (119905)] 1198732 [119909 (119905 minus 120578 (119905)) minus 119909 (119905 minus 120578119872)minus int119905minus120578(119905)119905minus120578119872
1199091015840119879 (119904) 119889119904] = 0(58)
Because 1198773 gt 0 we have
minus 2 [120576119879 (119905) 120596119879 (119905)] 1198722 int119905minus1205781119905minus120578(119905)
1199091015840 (119904) 119889119904 le (120578 (119905) minus 1205781)sdot [120576119879 (119905) 120596119879 (119905)] 1198722119877minus13 1198722119879 [120576119879 (119905) 120596119879 (119905)]119879+ int119905minus1205781119905minus120578(119905)
1199091015840119879 (119904) 11987731199091015840 (119904) 119889119904(59)
minus 2 [120576119879 (119905) 120596119879 (119905)] 1198732 int119905minus120578(119905)119905minus120578119872
1199091015840 (119904) 119889119904 le (120578119872 minus 120578 (119905))sdot [120576119879 (119905) 120596119879 (119905)] 1198732119877minus13 1198731119879 [120576119879 (119905) 120596119879 (119905)]119879+ int119905minus120578(119905)119905minus120578119872
1199091015840119879 (119904) 11987731199091015840 (119904) 119889119904(60)
Therefore
minus 2 [120576119879 (119905) 120596119879 (119905)] 1198722 int119905minus1205781119905minus120578(119905)
1199091015840 (119904) 119889119904
minus 2 [120576119879 (119905) 120596119879 (119905)] 1198732 int119905minus120578(119905)119905minus120578119872
1199091015840 (119904) 119889119904le (120578 (119905) minus 1205781)sdot [120576119879 (119905) 120596119879 (119905)] 1198722119877minus13 1198722119879 [120576119879 (119905) 120596119879 (119905)]119879+ (120578119872 minus 120578 (119905))sdot [120576119879 (119905) 120596119879 (119905)] 1198732119877minus13 1198732119879 [120576119879 (119905) 120596119879 (119905)]119879
+ int119905minus1205781119905minus120578119872
1199091015840119879 (119904) 11987731199091015840 (119904) 119889119904
(61)
In addition 119910119879(119905)119910(119905)minus1205742120596119879(119905)120596(119905) both on the left and rightsides of equality (29) and 119909119879(119905)1198781119909(119905) + [Θ0(119868 + Γ)1198701198660(119868 +119871)119909(119905minus120578(119905))]1198791198782Θ0(119868+Γ)1198701198660(119868+119871)119909(119905minus120578(119905)) on the right sideof equal sign ldquo=rdquo By inserting (30) (31) (57) (58) and (61)into the obtained inequality the item minus int119905minus1205781
119905minus1205781198721199091015840119879(119904)11987731199091015840(119904)119889119904
can be offset while the item minus int119905minus120578119898119905minus1205781
1199091015840119879(119904)11987721199091015840(119904)119889119904 is offsetin Case 1 Then in the same methods of transformation asCase 1 the inequality (24) when 119897 = 2 can be obtainedTherefore the proof is complete
Remark 9 In the two different cases a variational weightingmatrix and Jessenrsquos inequalities are used to derive the 119867infinguaranteed cost fault-tolerant condition of the system inwhich more delay information is employed to reduce theconservatism
The next section will provide sufficient conditions fordesigning the guaranteed cost fault-tolerant control for adouble-fault NCS
4 Guaranteed Cost Fault-Tolerant Control ofDouble-Fault NCS
Inequality (24) is not linear with respect to the gain matricesof the controller so it is needs to be reformulated into LMIsvia a change of variables
Theorem 10 Given symmetric positive definite matrices 1198781and 1198782 a set of constant 120578119898 120578119872 1205881 gt 0 1205882 gt 0 120582119894 (119894 = from1 to 7) and 120572 = (120578119872 minus 120578119898)2 If there exists a set of symmetricpositive definite matrices 119895 (119895 = 1 2 3)119883 andmatrix gt 0as well as matrices 1120573 2120573 1120573 2120573 (120573 =from 1 to 8)
12 Mathematical Problems in Engineering
119884 and a set of constants 120576 gt 0 and 120583 gt 0 satisfying theLMIs
[[[[[[[[[[[[[[[[[[[[[[[[[[
minus120576119868 0 0 0 120576119863119879lowast minus (1198781 + 119862119879119862)minus1 0 0 Πlowast lowast minus1198782minus1 0 Σlowast lowast lowast minusΓ119897 Ω119897119896lowast lowast lowast lowast Φ119897lowast lowast lowast lowast lowastlowast lowast lowast lowast lowastlowast lowast lowast lowast lowastlowast lowast lowast lowast lowastlowast lowast lowast lowast lowast
0 0 0 0 00 0 0 0 00 Θ0119884 0 Θ0 00 0 0 0 0
119864119879 Θ 119883 Δ 119884119879minus120576119868 1198642Θ0119884 0 1198642Θ0 0lowast minus1205881119883119879 0 0 119884119879lowast lowast minus1205881minus1119883 0 0lowast lowast lowast minus1205882119868 0lowast lowast lowast lowast minus1205882minus1119868
]]]]]]]]]]]]]]]]]]]]]]
lt 0
119897 = 1 2 119896 = 1 2(62)
where
Φ1 =
[[[[[[[[[[[[[[[[[[[[[
minus1 + 1205821119860119883119879 + 1205821119883119860119879 1 + 1205822119883119860119879 + 11 1205823119883119860119879 minus 11 1205824119883119860119879lowast minus1 + 12 + 12119879 13119879 minus 12 14119879lowast lowast minus3120572 minus 12 minus 12119879 3120572 minus 14119879lowast lowast lowast minus3120572lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
minus 1205821119883119879 + 119883119860119879 Ψ1 + 1205825119883119860119879 1205826119883119860119879 + 1205827119883119860119879 + 1205821119867119883119879 0minus1205822119883119879 + 15119879 Ψ2 + 16119879 1205822119867119883119879 + 17119879 + 18119879 0minus1205823119883119879 minus 15119879 Ψ3 minus 16119879 1205823119867119883119879 minus 17119879 minus 18119879 0
minus1205824119883119879 Ψ4 1205824119867119883119879 012057811989821 + 120572 (2 + 3) minus 119883119879 minus 119883 Ψ5 minus 1205825119883 119867119883119879 minus 1205826119883 minus 1205827119883 0
lowast Ψ6 Ξ 0lowast lowast 1205826119867119883119879 + 1205827119867119883119879 + 1205826119883119867119879 + 1205827119883119867119879 0lowast lowast lowast minus120583119868
]]]]]]]]]]]]]]]]]
Φ2 =
[[[[[[[[[[[[[[[[[[[[[
minus1 + 1205821119860119883119879 + 1205821119883119860119879 1 + 1205822119883119860119879 1205823119883119860119879 + 21 1205824119883119860119879 minus 21lowast minus1 minus 2120572 2120572 + 22 minus22lowast lowast minus2120572 + 23 + 23119879 24119879 minus 23lowast lowast lowast minus24 minus 24119879lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
Mathematical Problems in Engineering 13
minus 1205821119883119879 + 119883119860119879 Ψ11015840 + 1205825119883119860119879 1205826119883119860119879 + 1205827119883119860119879 + 1205821119867119883119879 0minus1205822119883119879 Ψ21015840 1205822119867119883119879 0
minus1205823119883119879 + 25119879 Ψ31015840 + 26119879 1205823119867119883119879 + 27119879 + 28119879 0minus1205824119883119879 minus 25119879 Ψ41015840 minus 26119879 1205824119867119883119879 minus 27119879 minus 28119879 0
12057811989821 + 120572 (2 + 3) minus 119883 minus 119883119879 Ψ51015840 minus 1205825119883 119867119883119879 minus 1205826119883 minus 1205827119883 0lowast Ψ61015840 Ξ1015840 0lowast lowast 1205826119867119883119879 + 1205827119867119883119879 + 1205826119883119867119879 + 1205827119883119867119879 0lowast lowast lowast minus120583119868
]]]]]]]]]]]]]]]]]]]]]
Γ1 = 1205721198772Γ1 = 1205722Γ2 = 1205723
Ω11 = 1205721119879Ω12 = 1205721119879Ω21 = 1205722119879Ω22 = 1205722119879
1119879 = [11119879 12119879 13119879 14119879 15119879 16119879 17119879 18119879] 2119879 = [21119879 22119879 23119879 24119879 25119879 26119879 27119879 28119879]
1119879 = [11119879 12119879 13119879 14119879 15119879 16119879 17119879 18119879] 1198732119879 = [21119879 22119879 23119879 24119879 25119879 26119879 27119879 28119879]
Ξ = 1205826 (119861Θ0119884)119879 + 1205827 (119861Θ0119884)119879 + 1205825119867119883119879 minus 17119879 minus 18119879 + 17119879 + 18119879Ψ119894 = 120582119894119861Θ0119884 + 1119894 minus 1119894 (119894 = 1 2 3 4)
Ψ5 = 119861Θ0119884 + 1119894 minus 1119894Ψ6 = 1205825119861Θ0119884 + 1205825 (119861Θ0119884)119879 minus 11987216 minus 11987216119879 + 11987316 + 11987316119879
Ξ1015840 = 1205826 (119861Θ0119884)119879 + 1205827 (119861Θ0119884)119879 + 1205825119867119883119879 minus 27119879 minus 28119879 + 27119879 + 28119879Ψ1198941015840 = 120582119894119861Θ0119884 + 2119894 minus 2119894 (119894 = 1 2 3 4)
Ψ51015840 = 119861Θ0119884 + 2119894 minus 2119894Ψ61015840 = 1205825119861Θ0119884 + 1205825 (119861Θ0119884)119879 minus 26 minus 26119879 + 26 + 26119879
119863 = [1205821119863119879 1205822119863119879 1205823119863119879 1205824119863119879 119863119879 1205825119863119879 1205826119863119879 + 1205827119863119879 0]119879 119864 = [1198641119883119879 0 0 0 0 1198642Θ0119884 0 0]
119883 = [0 0 0 0 0 119883119879 0 0]119879 Π = [119883119879 0 0 0 0 0 0 0]
14 Mathematical Problems in Engineering
Θ = [(1205821119861Θ0119884)119879 (1205822119861Θ0119884)119879 (1205823119861Θ0119884)119879 (1205824119861Θ0119884)119879 (119861Θ0119884)119879 (1205825119861Θ0119884)119879 (1205826119861119884)119879 + (1205827119861119884)119879 0]119879 Δ = [(1205821119861Θ0)119879 (1205822119861Θ0)119879 (1205823119861Θ0)119879 (1205824119861Θ0)119879 (119861Θ0)119879 (1205825119861Θ0)119879 (1205826119861Θ0)119879 + (1205827119861Θ0)119879 0]119879
119884 = [0 0 0 0 0 119884 0 0] Σ = [0 0 0 0 0 Θ0119884 0 0]
(63)
then the 119867infin guaranteed cost control gain 119870 = 119884119883minus1198791198660minus1 canrendermodel (21) to be asymptotically stable with the119867infin normbound 120574 = radic120583 13e upper bound 1198690 of cost function 119869 is givenas
1198690 = 119909119879 (0) 119883minus1119883minus119879119909 (0)+ 120578119898 int0
minus120578119898
int0119904
1199091015840119879 (120591) 119883minus11119883minus1198791199091015840 (120591) 119889119904119889120591+ intminus120578119898minus1205781
int0119904
1199091015840119879 (120591) 119883minus12119883minus1198791199091015840 (120591) 119889119904119889120591+ intminus1205781minus120578119872
int0119904
1199091015840119879 (120591) 119883minus13119883minus1198791199091015840 (120591) 119889119904119889120591
(64)
Proof The proof is based on a suitable transformation anda change of variables allowing us to obtain inequality (24)in Theorem 8 First we define 1198805 = 1198800 119880119894 = 1205821198941198800 (119894 =from 1 to 4) 1198806 = 12058251198800 in (24) Because we consider thedimension of state119909is equal to that of outside disturbance120596 in this paper we can also define 1198807 = 12058261198800 1198808 =12058271198800 Obviously (24) implies 1198805 gt 0 so 1198800 is nonsingularThen using the analysis method of D Yue [40] and Z Wang[41] pre- and postmultiplying both sides of inequality (24)with diag(119868 119868 119868 119883 119868 119883 119868 119868 119868) and its transpose where = diag(119883 119883 119883 119883 119883 119883 119883 119883) and 119883 = 1198800minus1 introducingnew variables 119883119875119883119879 = 119883119877119895119883119879 = 119895 (119895 = 1 2 3)119883119872119897120573119883119879 = 119897120573 119883119873119897120573119883119879 = 119897120573 (119897 = 1 2 120573 = 1 2 sdot sdot sdot 8)1198701198660119883119879 = 119884 and 120583 = 1205742 From the definition of 1198660 we know1198660 is invertible so 119870 can be obtained by calculating 119870 =119884119883minus1198791198660minus1 It is easy to see that 10 and (64) respectively imply(24) and (26) Therefore from Theorem 8 we can completethe proof
To obtain the optimal bound 119869lowast shown in (26) thecommonly used method is to consider it as an optimizationproblem like [42] in which the expression of initial state 119909(119905)(119905 isin [minus120578119872 0]) needs to be known The expression of initialstate is not given in this paper Therefore the optimizationmethod used in [42] cannot be used here A practical methodto obtain 119869lowast also used by D Yue [43] is employed as follows
Suppose 1199091015840(119905) is bounded if 119905 isin [minus120578119872 0] and satisfying1199091015840119879(120591)1199091015840(120591) le ℓ In addition suppose that there exists 120573119894 gt0 (119894 = 1 2 3) satisfying119883minus1119894119883minus119879 le 120573119894119868 119894 = 1 2 3119883minus1119883minus119879 le 1205734119868 (65)
Inserting this into (64) we have
1198690 le 1205734119909119879 (0) 119909 (0) + 05ℓ12057311205781198983 + 05ℓ1205732 (12057812 minus 1205781198982)+ 05ℓ1205733 (1205781198722 minus 12057812) = 119869lowast (66)
Applying the Schur complement to the inequalities above wehave
[minus120573119894119868 119883minus1lowast minus119877119894minus1] lt 0 119894 = 1 2 3
[minus1205734119868 119883minus1lowast minus119875minus1] lt 0
(67)
Then combining 10 and (67) 119894minus1 119894 (119894 = 1 2 3)minus1 119883minus1 119883 exist simultaneously We cannot directly usethe LMI tools to solve the problem Defining 119894minus1 = 119894(119894 = 1 2 3) minus1 = 119883minus1 = and using the idea of thecone complementary linearization algorithm the guaranteedcost fault-tolerant controller of system (21) and the value ofoptimal performance indicator 119869lowast can be obtained in thefollowing method
Minimize 119905119903119886119888119890 (11 + 22 + 33 + + )+ 1205734 + 0512057311205781198983 + 051205732 (12057812 minus 1205781198982)+ 051205733 (1205781198722 minus 12057812)
Subject to 119868119899119890119902119906119886119897119894119905119894119890119904 (62) [minus120573119894119868
lowast minus119894] lt 0 (119894 = 1 2 3)
[minus1205734119868 lowast minus] lt 0
[119883 119868lowast ] ge 0
[1 119868lowast 1] ge 0
[2 119868lowast 2] ge 0
Mathematical Problems in Engineering 15
[3 119868lowast 3] ge 0
[ 119868lowast ] ge 0
119894 gt 0 (119894 = 1 2 3) (68)
5 Simulations
Example 11 Consider inverted pendulum model that canusually be modelled as (1) and the system parameters aregiven as follows
119860 = [minus2 1110 4 ]
119861 = [01minus4]
119862 = [minus03151 01011 03]
119867 = [015 minus056minus01 032 ]
Δ119860 = [004 sin 119905 015 sin 119905minus02 sin 119905 075 sin 119905]
Δ119861 = [002 sin 119905minus01 sin 119905]
119863 = [ 01minus05]
119865 (119905) = sin 119905
(69)
Therefore we have
1198641 = [04 15] 1198642 = 02 (70)
For this simulation the initial state of system is assumed119909(0) = [2 minus1]119879 and the external disturbance is considered as120596(119905) = [015 minus05]119879 3119904 le 119905 le 4119904
0 119900119905ℎ119890119903119904 Here we take the upper
bound of time-varying delay as 120578119872 = 03119904 and its lower boundas 120578119898 = 0119904 namely 0 le 120578(119905) le 03 In addition the faultbounds of the system are given in Table 1
Table 1 The bounds of faults
Symbol Upper bound Lower boundActuatorfaultsΘ 136 009
SensorFaults119866
[[
165 00 175]
][[
0 00 015]
]
minus01
0
01
02
03
04
05
Del
ay
1 2 3 4 5 60Time s
Figure 2 The time-varying delay in double-fault NCS
We choose the parameters as follows
1205821 = 011205822 = 0151205823 = minus0641205824 = 031205825 = 1205826 = 0351205827 = 181198782 = 0311205881 = 30001205882 = 22032ℓ = 1
1198781 = [10013 00 9207]
(71)
By taking advantage of the LMI tool box and inserting theabove parameters into inequalities 10 and (68) we can obtainthe 119867infin guaranteed cost control gain
119870 = 119884119883minus1198791198660minus1 = [85163 151398] (72)
with 120574 = radic120583 = 1952516The corresponding optimal performance indicator (the
upper bound value of guaranteed cost function) is 119869lowast =83162563The time-varying delay is shown in Figure 2 In Figure 3
(a) is the actuator fault which is a piecewise-linear function
16 Mathematical Problems in Engineering
002040608
1121416
Actu
ator
faul
t
1 2 3 4 5 60Time s
(a) Time-varying actuator fault
minus020
02040608
112141618
Sens
or fa
ult
1 2 3 4 5 60Time s
(b) Time-varying sensor fault
Figure 3 The time-varying faults
x1
x2
1 2 3 4 5 60Time s
minus15
minus1
minus05
0
05
1
15
2
Stat
e X
Figure 4 The state response curve of double-fault NCS
1 2 3 4 5 60Time s
minus8minus7minus6minus5minus4minus3minus2minus1
012
Con
trol i
nput
Figure 5 The control input of double-fault NCS
It keeps the minimum value from 13119904 to 17119904 while it keepsthe maximum value from 37119904 to 43119904 The sensor faults areshown as (b) which is sinusoidal It should be noted thatthe green dotted line represents the fault of sensor 1 whilethe blue solid line represents the fault of sensor 2 Throughthe state response of the double-fault NCS shown in Figure 4and corresponding control signal shown in Figure 5 we know
x1
x2
1 2 3 4 5 60Time s
minus8
minus6
minus4
minus2
0
2
4
6
Stat
e X
Figure 6 The state response curve of double-fault NCS
the 119867infin guaranteed cost controller designed in this paper isable to make the double-fault NCS asymptotically stable Thesystem gets preliminarily steady at 2119904 and its state can returnto the equilibrium position in a certain period of time whenthe NCS is affected by external disturbance Compared withthe state response of worse stability shown in Figure 6 whenthe method proposed in [28] is used for this double-faultproblem it sufficiently proves the effectiveness and feasibilityof the method proposed in this paper
To better illustrate the effectiveness of the method pro-posed in this paper the following example is presented
Example 12 Consider the parameters of system (1) as follows
119860 = [[[[[[
021 0 035 10 minus53 minus586 323
365 minus11 minus156 minus0890 0 minus158 minus285
]]]]]]
119861 = [559 12 minus089 13]119879 119862 = [17 02 015 minus018]
Mathematical Problems in Engineering 17
minus15
minus1
minus05
0
05
1
15
Stat
e X1 2 3 4 5 6 7 8 9 100
Time s
R1R2
R3R4
Figure 7 The state response curve of double-fault NCS
Δ119860 = [[[[
082 sin 119905 0 0 00 012 sin 119905 0 00 0 minus058 sin 119905 00 0 0 101 sin 119905]]]]
Δ119861 = [[[[
minus015 sin 119905008 sin 1199050minus028 sin 119905]]]]
119867 = [[[[
minus041 096 052 0006 minus057 0 021121 0 059 0minus032 minus011 minus035 minus003]]]]
119863 = 1198684times4119865 (119905) = diag (sin 119905 sin 119905 sin 119905 sin 119905)
(73)
Therefore we have
1198641 = diag (082 012 minus058 101) 1198642 = [minus015 008 0 minus028]119879 (74)
For this simulation the initial state of system is assumedas 119909(0) = [121 minus051 023 minus018]119879 and the externaldisturbance is considered as
120596 (119905) = [015 cos 119905 015 cos 119905 minus012 sin 119905 minus025 cos 119905]119879 6119904 le 119905 le 81199040 119900119905ℎ119890119903119904 (75)
The uncertain time-varying delay satisfies 0 le 120578(119905) le023119904 In addition the fault bounds of the system are givenin Table 2 Other parameters are selected as follows
1205821 = 121205822 = minus2031205823 = 1681205824 = minus231205825 = minus1051205826 = 6051205827 = 5121198781 = diag (19888 15634 8709 12876) 1198782 = 586
1205881 = 57981205882 = 1879ℓ = 1
(76)
By taking advantage of the LMI tool box and submittingthese parameters above into inequalities 10 and (68) we canobtain the 119867infin guaranteed cost control gain
119870 = 119884119883minus1198791198660minus1= [minus17256 15512 minus08571 07451]
with 120574 = radic120583 = 5819806(77)
The corresponding optimal performance indicator is 119869lowast =65021047 From the state response shown in Figure 7 andcontrol signal shown in Figure 8 we undoubtedly know
18 Mathematical Problems in Engineering
Table 2 The bounds of faults
Symbol Upper bound Lower boundActuatorfaultsΘ 150 012
SensorFaults119866
[[[[[[[[
185 0 0 00 160 0 00 0 125 00 0 0 165
]]]]]]]]
[[[[[[[[
025 0 0 00 0 0 00 0 0 00 0 0 015
]]]]]]]]
minus4
minus3
minus2
minus1
0
1
2
Con
trol i
nput
1 2 3 4 5 6 7 8 9 100Time s
Figure 8 The control input of double-fault NCS
the double-fault NCS is asymptotically stable when the 119867infinguaranteed cost controller is used This further demonstratesthe feasibility and effectiveness of the method proposed inthis paper
6 Conclusions
The issues of modelling and 119867infin guaranteed cost fault-tolerant control of double-fault networked control systemshave been addressedThe closed-loopmodel of a double-faultNCS is set up with regard to the influences of transmissiondelay packet dropout uncertain parameters and externaldisturbance In addition the piecewise delay method is pro-posed to reduce the conservatism when analysing the delay-dependent faulty system With the help of Lee Y Srsquos lemmathe sufficient condition of guaranteed cost fault-tolerantfor time-varying double-fault NCS is introduced using theLyapunov-Krasovskii theory and weighted technology Themethod of designing a guaranteed cost fault-tolerant con-troller for this NCS is given based on LMI Our next researchtask will be choosing more reasonable values of parameters120582119894 (119894 = 1 2 3 4 5 6 7) to reduce the conservatism further Ofcourse the study on scheduling policy of double-fault NCS isalso a challenge but indispensable work
Data Availability
The data used in this paper can be got by simulations
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was partly supported by National Nature Sci-ence Foundation of China under Grants 51875380 51375323and 61563022 Cooperative Innovation Fund-Prospective ofJiangsu Province under Grant BY2016044-01Major Programof Natural Science Foundation of Jiangxi Province Chinaunder Grant 20152ACB20009 High Level Talents of ldquoSix Tal-ent Peaksrdquo in Jiangsu Province China under Grant DZXX-046
References
[1] H Zhang Y Shi J Wang and H Chen ldquoA New Delay-compensation Scheme for Networked Control Systems inController Area Networksrdquo IEEE Transactions on IndustrialElectronics vol 65 no 9 pp 7239ndash7247 2018
[2] A Da Silva and C Kawan ldquoRobustness of critical bit rates forpractical stabilization of networked control systemsrdquo Automat-ica vol 93 pp 397ndash406 2018
[3] Q Zhu K Lu and Y Zhu ldquoGuaranteed cost control ofnetworked control systems under transmission control protocolwith active queue managementrdquo Asian Journal of Control vol18 no 4 pp 1546ndash1557 2016
[4] Q Zhu K Lu and Y Zhu ldquoHinfin Guaranteed Cost Control forNetworked Control Systems under Scheduling Policy Based onPredicted Errorrdquo Mathematical Problems in Engineering vol2014 Article ID 586029 12 pages 2014
[5] W H Chen J X Xu and Z H Guan ldquoGuaranteed cost controlfor uncertain Markovian jump systems with mode-dependenttime-delaysrdquo IEEE Transactions on Automatic Control vol 48no 12 pp 2270ndash2277 2003
[6] HM Soliman A DabroumM S Mahmoud andM SolimanldquoGuaranteed-cost reliable control with regional pole placementof a power systemrdquo Journal of 13e Franklin Institute vol 348no 5 pp 884ndash898 2011
[7] X Li and X-B Wu ldquoGuaranteed cost fault-tolerant controllerdesign of networked control systems under variable-periodsamplingrdquo Information Technology Journal vol 8 no 4 pp 537ndash543 2009
[8] L Zhang and G Orosz ldquoMotif-Based Design for ConnectedVehicle Systems in Presence of Heterogeneous ConnectivityStructures and Time Delaysrdquo IEEE Transactions on IntelligentTransportation Systems vol 17 no 6 pp 1638ndash1651 2016
[9] Z Li G Guo and Z Liu ldquoCommunication parameter designfor networked control systems with the slotted ALOHA accessprotocolrdquo Information Sciences vol 447 pp 205ndash215 2018
[10] K Lu G Jing and L Wang ldquoDistributed algorithm for solv-ing convex inequalitiesrdquo Institute of Electrical and ElectronicsEngineers Transactions on Automatic Control vol 63 no 8 pp2670ndash2677 2018
[11] Q Zhu K Lu and Y Zhu ldquoObserver-based feedback controlof networked control systems with delays and packet dropoutsrdquoJournal of Dynamic SystemsMeasurement andControl vol 138no 2 pp 1ndash8 2016
Mathematical Problems in Engineering 19
[12] Y Li H Li and W Sun ldquoEvent-triggered control for robust setstabilization of logical control networksrdquo Automatica vol 95pp 556ndash560 2018
[13] X Luan P Shi and F Liu ldquoStabilization of networked controlsystems with random delaysrdquo IEEE Transactions on IndustrialElectronics vol 58 no 9 pp 4323ndash4330 2011
[14] Y Zhang and J Jiang ldquoBibliographical review on reconfigurablefault-tolerant control systemsrdquo Annual Reviews in Control vol32 no 2 pp 229ndash252 2008
[15] N H Ei-Farra A Gani and P D Christofides ldquoFault-tolerantcontrol of process systems using communication networksrdquoAIChE Journal vol 51 no 6 pp 1665ndash1682 2005
[16] H R Karimi and H Gao ldquoNew delay-dependent exponentialHinfin synchronization for uncertain neural networks withmixedtime delaysrdquo IEEE Transactions on Systems Man and Cybernet-ics Part B Cybernetics vol 40 no 1 pp 173ndash185 2010
[17] Y N Guo Q Y Zhang D W Gong and J H Zhang ldquoRobustfault-tolerant control of networked control systems with time-varying delaysrdquoControl andDecision vol 23 no 6 pp 689ndash6922008
[18] Z Mao and B Jiang ldquoFault identification and fault-tolerantcontrol for a class of networked control systemsrdquo InternationalJournal of Innovative Computing Information and Control vol3 no 5 pp 1121ndash1130 2007
[19] C-X Yang Z-H Guan and J Huang ldquoStochastic fault tolerantcontrol of networked control systemsrdquo Journal of 13e FranklinInstitute vol 346 no 10 pp 1006ndash1020 2009
[20] Z Mao Y Pan B Jiang and W Chen ldquoFault Detectionfor a Class of Nonlinear Networked Control Systems withCommunication Constraintsrdquo International Journal of ControlAutomation and Systems vol 16 no 1 pp 256ndash264 2018
[21] A Qiu J Gu C Wen and J Zhang ldquoSelf-triggered faultestimation and fault tolerant control for networked controlsystemsrdquo Neurocomputing vol 272 no 1 pp 629ndash637 2018
[22] Q Zhu K Lu G Xie and Y Zhu ldquoGuaranteed Cost Fault-Tolerant Control for Networked Control Systems with SensorFaultsrdquoMathematical Problems in Engineering vol 2015 ArticleID 549347 9 pages 2015
[23] W Wu and Y Zhang ldquoEvent-triggered fault-tolerant controland scheduling codesign for nonlinear networked control sys-tems with medium-access constraint and packet disorderingrdquoInternational Journal of Robust and Nonlinear Control vol 28no 4 pp 1182ndash1198 2018
[24] X Xiao and X-J Li ldquoAdaptive dynamic programming method-based synchronisation control of a class of complex dynamicalnetworks with unknown dynamics and actuator faultsrdquo IETControl 13eory amp Applications vol 12 no 2 pp 291ndash298 2018
[25] PMhaskar AGani CMcFall PDChristofides and J FDavisldquoFault-tolerant control of nonlinear process systems subject tosensor faultsrdquo AIChE Journal vol 53 no 3 pp 654ndash668 2007
[26] M Liu P Shi L Zhang and X Zhao ldquoFault-tolerant controlfor nonlinear Markovian jump systems via proportional andderivative sliding mode observer techniquerdquo IEEE Transactionson Circuits and Systems I Regular Papers vol 58 no 11 pp2755ndash2764 2011
[27] S Li D Sauter C Aubrun and J Yame ldquoStability guaranteedactive fault-tolerant control of networked control systemsrdquoJournal of Control Science and Engineering vol 2008 Article ID189064 9 pages 2008
[28] X Y Luo M J Shang C L Chen and X P Guan ldquoGuaranteedcost active fault-tolerant control of networked control system
with packet dropout and transmission delayrdquo InternationalJournal of Automation and Computing vol 7 no 4 pp 509ndash5152010
[29] Q Zhu B Xie and Y Zhu ldquoGuaranteed Cost Control forMultirate Networked Control Systems with Both Time-Delayand Packet-Dropoutrdquo Mathematical Problems in Engineeringvol 2014 Article ID 637329 9 pages 2014
[30] R Manivannan R Samidurai J Cao and M Perc ldquoDesign ofResilient Reliable Dissipativity Control for Systems with Actu-ator Faults and Probabilistic Time-Delay Signals via Sampled-Data Approachrdquo IEEE Transactions on Systems Man andCybernetics Systems 2018
[31] R Manivannan R Samidurai J Cao A Alsaedi and F EAlsaadi ldquoNon-Fragile Extended Dissipativity Control Designfor Generalized Neural Networks with Interval Time-DelaySignalsrdquo Asian Journal of Control 2019
[32] Q Gao and N Olgac ldquoBounds of imaginary spectra of LTIsystems in the domain of two of the multiple time delaysrdquoAutomatica vol 72 pp 235ndash241 2016
[33] Q Gao A S Kammer U Zalluhoglu and N Olgac ldquoCriticaleffects of the polarity change in delayed states within anLTI dynamics with multiple delaysrdquo Institute of Electrical andElectronics Engineers Transactions onAutomatic Control vol 60no 11 pp 3018ndash3022 2015
[34] Q Gao Z Zhang and C Yang ldquoSign inverting control andits important properties for multiple time-delayed systemsrdquo inProceedings of the 10th ASME Dynamic Systems and ControlConference pp 979ndash984 Virginia USA 2017
[35] Y M Zhang and J Jiang ldquoActive fault-tolerant control systemagainst partial actuator failuresrdquo IEE Proceedings Control13eoryand Applications vol 149 no 1 pp 95ndash104 2002
[36] G Garcia J Bernussou andD Arzelier ldquoRobust stabilization ofdiscrete-time linear systems with norm-bounded time-varyinguncertaintyrdquo Systems amp Control Letters vol 22 no 5 pp 327ndash339 1994
[37] Y Wang L Xie and C E de Souza ldquoRobust control of a classof uncertain nonlinear systemsrdquo Systems amp Control Letters vol19 no 2 pp 139ndash149 1992
[38] D Yue E Tian and Y Zhang ldquoA piecewise analysis methodto stability analysis of linear continuousdiscrete systems withtime-varying delayrdquo International Journal of Robust and Non-linear Control vol 19 no 13 pp 1493ndash1518 2009
[39] X-J Jing D-L Tan and Y-C Wang ldquoAn LMI approach tostability of systems with severe time-delayrdquo IEEE Transactionson Automatic Control vol 49 no 7 pp 1192ndash1195 2004
[40] D Yue Q-L Han and J Lam ldquoNetwork-based robust Hinfincontrol of systems with uncertaintyrdquo Automatica vol 41 no 6pp 999ndash1007 2005
[41] Z Wang F Yang D W C Ho and X Liu ldquoRobust Hinfincontrol for networked systemswith randompacket lossesrdquo IEEETransactions on Systems Man and Cybernetics Part B vol 37no 4 pp 916ndash924 2007
[42] M S Mahmoud ldquoControl of uncertain state-delay systemsguaranteed cost approachrdquo IMA Journal of Mathematical Con-trol and Information vol 18 no 1 pp 109ndash128 2001
[43] D Yue C Peng andG Y Tang ldquoGuaranteed cost control of lin-ear systems over networks with state and input quantisationsrdquoIEE Proceedings Control 13eory and Applications vol 153 no 6pp 658ndash664 2006
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

10 Mathematical Problems in Engineering
119875 minus 1198801 + (1198805119860)119879 Ψ110158401015840 + (1198806119860)119879 (1198807119860)119879 + (1198808119860)119879 + 1198801119867 0minus1198802 + 11987215119879 Ψ210158401015840 + 11987216119879 1198802119867 + 11987217119879 + 11987218119879 0minus1198803 minus 11987315119879 Ψ310158401015840 minus 11987316119879 1198803119867 minus 11987317119879 minus 11987318119879 0
minus1198804 Ψ41015840 1198804119867 012057811989821198771 + 120572 (1198772 + 1198773) minus 1198805 minus 1198805119879 Ψ510158401015840 minus 1198806119879 1198805119867 minus 1198807119879 minus 1198808119879 0
lowast Ψ610158401015840 Ξ210158401015840 0lowast lowast 1198807119867 + 1198808119867 + (1198807119867)119879 + (1198808119867)119879 0lowast lowast lowast minus1205742119868
]]]]]]]]]]]]]]]]]]]
Ξ210158401015840 = [1198807119861Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 + [1198808119861Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 + 1198806119867 minus 11987217119879 minus 11987218119879 + 11987317119879 + 11987318119879Ψ11989410158401015840 = 119880119894119861Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) + 1198731119894 minus 1198721119894 (119894 = 1 2 3 4 5)
Ψ61015840 = 1198806119861Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) + [1198806119861Θ0 (119868 + Γ) 1198701198660 (119868 + 119871)]119879 minus 11987216 minus 11987216119879 + 11987316 + 11987316119879 = [1198641 0 0 0 0 1198642Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) 0 0]
(48)
With the definition of scalar 120576 gt 0 we apply the theory givenin Lemma 6 to (47) also used by Y Wang and L Xie [37]in which the uncertain matrix 119865 can be eliminated and asufficient condition of (47) is obtained
[[[[[[[
minus (1198781 + 119862119879119862)minus1 0 0 lowast minus1198782minus1 0 Σlowast lowast minus1205721198772 Ω1119896lowast lowast lowast Φ101584010158401
]]]]]]]
+ 120576 [[[[[[
01198630
]]]]]]
[[[[[[
01198630
]]]]]]
119879
+ 120576minus1[[[[[[[
000
119879
]]]]]]]
[[[[[[[
000
119879
]]]]]]]
119879
lt 0
(49)
Applying the Schur complement to inequality (49) we have
[[[[[[[[[[[[[[
minus120576119868 0 0 0 120576119879 0lowast minus (1198781 + 119862119879119862)minus1 0 0 0lowast lowast minus1198782minus1 0 Σ 0lowast lowast lowast minus1205721198772 Ω1119896 0lowast lowast lowast lowast Φ101584010158401 119879lowast lowast lowast lowast lowast minus120576119868
]]]]]]]]]]]]]]
lt 0
(50)
There exists 1205881 gt 0 1205882 gt 0 Based on (17) and Remark 3 inSection 2 we know that 119871119879119871 le 119868 and Γ119879Γ le 119868 According
to expressions (47) (49) and (50) we obviously know that1198805 gt 0 Using Lemma 6 again we have
Θ0 (119868 + Γ) 1198701198660119871 + [Θ0 (119868 + Γ) 1198701198660119871]119879le 1205881minus1Θ0 (119868 + Γ) 11987011986601198805minus1 [Θ0 (119868 + Γ) 1198701198660]119879
+ 12058811198805(51)
and
Θ0Γ1198701198660 + (Θ0Γ1198701198660)119879le 1205882minus1Θ0Θ0119879 + 1205882 (1198701198660)1198791198701198660
(52)
Based on inequalities (51) (52) and the Schur complementwe know inequality (24) is a sufficient condition of inequality(50) while inequality (50) is equivalent to inequality (41)Therefore we can undoubtedly obtain inequality (24) asa sufficient condition of inequality (41) Thus based oninequality (39) and (41) we know(1) if120596(119905) equiv 0 obviously we have V1015840(119905) lt 0 so system (21)is asymptotically stable(2) if 119909(0) equiv 0 we know V(0) = 0 In addition it can beobtained that V(infin) ge 0
Therefore
intinfin0
V1015840 (119905) + 119910119879 (119905) 119910 (119905) minus 1205742120596119879 (119905) 120596 (119905) 119889119905= V (infin) + intinfin
0119910119879 (119905) 119910 (119905) minus 1205742120596119879 (119905) 120596 (119905) 119889119905 lt 0
(53)
Thus
intinfin0
119910119879 (119905) 119910 (119905) lt intinfin0
1205742120596119879 (119905) 120596 (119905) 119889119905 (54)
Mathematical Problems in Engineering 11
Because 120596(119905) isin 1198712[0 infin) we have1003817100381710038171003817119910 (119905)1003817100381710038171003817 le 120574 120596 (119905)119879 (55)
It is known that model (21) is asymptotically stable with the119867infin norm bound 120574Moreover according to (39) and (41) we have
V1015840 (119905) le minus119909119879 (119905) 1198781119909 (119905)minus [Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) 119909 (119905 minus 120578 (119905))]119879
sdot 1198782Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) 119909 (119905 minus 120578 (119905))(56)
Through the integral operation it can be determined that119869 le V(0) In addition by inserting 119905 = 0 into the Lyapunov-Krasovskii function shown as expression (28) the upperbound of cost function 119869 can be obtained and shown asexpression (26) Therefore the theorem is verified if 119897 = 1Case 2 If 120578(119905) isin [1205781 120578119872] weighted technology based on theprinciple of Newton-Leibniz is introduced as follows
2 [120576119879 (119905) 120596119879 (119905)] 1198722 [119909 (119905 minus 1205781) minus 119909 (119905 minus 120578 (119905))minus int119905minus1205781119905minus120578(119905)
1199091015840119879 (119904) 119889119904] = 0(57)
2 [120576119879 (119905) 120596119879 (119905)] 1198732 [119909 (119905 minus 120578 (119905)) minus 119909 (119905 minus 120578119872)minus int119905minus120578(119905)119905minus120578119872
1199091015840119879 (119904) 119889119904] = 0(58)
Because 1198773 gt 0 we have
minus 2 [120576119879 (119905) 120596119879 (119905)] 1198722 int119905minus1205781119905minus120578(119905)
1199091015840 (119904) 119889119904 le (120578 (119905) minus 1205781)sdot [120576119879 (119905) 120596119879 (119905)] 1198722119877minus13 1198722119879 [120576119879 (119905) 120596119879 (119905)]119879+ int119905minus1205781119905minus120578(119905)
1199091015840119879 (119904) 11987731199091015840 (119904) 119889119904(59)
minus 2 [120576119879 (119905) 120596119879 (119905)] 1198732 int119905minus120578(119905)119905minus120578119872
1199091015840 (119904) 119889119904 le (120578119872 minus 120578 (119905))sdot [120576119879 (119905) 120596119879 (119905)] 1198732119877minus13 1198731119879 [120576119879 (119905) 120596119879 (119905)]119879+ int119905minus120578(119905)119905minus120578119872
1199091015840119879 (119904) 11987731199091015840 (119904) 119889119904(60)
Therefore
minus 2 [120576119879 (119905) 120596119879 (119905)] 1198722 int119905minus1205781119905minus120578(119905)
1199091015840 (119904) 119889119904
minus 2 [120576119879 (119905) 120596119879 (119905)] 1198732 int119905minus120578(119905)119905minus120578119872
1199091015840 (119904) 119889119904le (120578 (119905) minus 1205781)sdot [120576119879 (119905) 120596119879 (119905)] 1198722119877minus13 1198722119879 [120576119879 (119905) 120596119879 (119905)]119879+ (120578119872 minus 120578 (119905))sdot [120576119879 (119905) 120596119879 (119905)] 1198732119877minus13 1198732119879 [120576119879 (119905) 120596119879 (119905)]119879
+ int119905minus1205781119905minus120578119872
1199091015840119879 (119904) 11987731199091015840 (119904) 119889119904
(61)
In addition 119910119879(119905)119910(119905)minus1205742120596119879(119905)120596(119905) both on the left and rightsides of equality (29) and 119909119879(119905)1198781119909(119905) + [Θ0(119868 + Γ)1198701198660(119868 +119871)119909(119905minus120578(119905))]1198791198782Θ0(119868+Γ)1198701198660(119868+119871)119909(119905minus120578(119905)) on the right sideof equal sign ldquo=rdquo By inserting (30) (31) (57) (58) and (61)into the obtained inequality the item minus int119905minus1205781
119905minus1205781198721199091015840119879(119904)11987731199091015840(119904)119889119904
can be offset while the item minus int119905minus120578119898119905minus1205781
1199091015840119879(119904)11987721199091015840(119904)119889119904 is offsetin Case 1 Then in the same methods of transformation asCase 1 the inequality (24) when 119897 = 2 can be obtainedTherefore the proof is complete
Remark 9 In the two different cases a variational weightingmatrix and Jessenrsquos inequalities are used to derive the 119867infinguaranteed cost fault-tolerant condition of the system inwhich more delay information is employed to reduce theconservatism
The next section will provide sufficient conditions fordesigning the guaranteed cost fault-tolerant control for adouble-fault NCS
4 Guaranteed Cost Fault-Tolerant Control ofDouble-Fault NCS
Inequality (24) is not linear with respect to the gain matricesof the controller so it is needs to be reformulated into LMIsvia a change of variables
Theorem 10 Given symmetric positive definite matrices 1198781and 1198782 a set of constant 120578119898 120578119872 1205881 gt 0 1205882 gt 0 120582119894 (119894 = from1 to 7) and 120572 = (120578119872 minus 120578119898)2 If there exists a set of symmetricpositive definite matrices 119895 (119895 = 1 2 3)119883 andmatrix gt 0as well as matrices 1120573 2120573 1120573 2120573 (120573 =from 1 to 8)
12 Mathematical Problems in Engineering
119884 and a set of constants 120576 gt 0 and 120583 gt 0 satisfying theLMIs
[[[[[[[[[[[[[[[[[[[[[[[[[[
minus120576119868 0 0 0 120576119863119879lowast minus (1198781 + 119862119879119862)minus1 0 0 Πlowast lowast minus1198782minus1 0 Σlowast lowast lowast minusΓ119897 Ω119897119896lowast lowast lowast lowast Φ119897lowast lowast lowast lowast lowastlowast lowast lowast lowast lowastlowast lowast lowast lowast lowastlowast lowast lowast lowast lowastlowast lowast lowast lowast lowast
0 0 0 0 00 0 0 0 00 Θ0119884 0 Θ0 00 0 0 0 0
119864119879 Θ 119883 Δ 119884119879minus120576119868 1198642Θ0119884 0 1198642Θ0 0lowast minus1205881119883119879 0 0 119884119879lowast lowast minus1205881minus1119883 0 0lowast lowast lowast minus1205882119868 0lowast lowast lowast lowast minus1205882minus1119868
]]]]]]]]]]]]]]]]]]]]]]
lt 0
119897 = 1 2 119896 = 1 2(62)
where
Φ1 =
[[[[[[[[[[[[[[[[[[[[[
minus1 + 1205821119860119883119879 + 1205821119883119860119879 1 + 1205822119883119860119879 + 11 1205823119883119860119879 minus 11 1205824119883119860119879lowast minus1 + 12 + 12119879 13119879 minus 12 14119879lowast lowast minus3120572 minus 12 minus 12119879 3120572 minus 14119879lowast lowast lowast minus3120572lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
minus 1205821119883119879 + 119883119860119879 Ψ1 + 1205825119883119860119879 1205826119883119860119879 + 1205827119883119860119879 + 1205821119867119883119879 0minus1205822119883119879 + 15119879 Ψ2 + 16119879 1205822119867119883119879 + 17119879 + 18119879 0minus1205823119883119879 minus 15119879 Ψ3 minus 16119879 1205823119867119883119879 minus 17119879 minus 18119879 0
minus1205824119883119879 Ψ4 1205824119867119883119879 012057811989821 + 120572 (2 + 3) minus 119883119879 minus 119883 Ψ5 minus 1205825119883 119867119883119879 minus 1205826119883 minus 1205827119883 0
lowast Ψ6 Ξ 0lowast lowast 1205826119867119883119879 + 1205827119867119883119879 + 1205826119883119867119879 + 1205827119883119867119879 0lowast lowast lowast minus120583119868
]]]]]]]]]]]]]]]]]
Φ2 =
[[[[[[[[[[[[[[[[[[[[[
minus1 + 1205821119860119883119879 + 1205821119883119860119879 1 + 1205822119883119860119879 1205823119883119860119879 + 21 1205824119883119860119879 minus 21lowast minus1 minus 2120572 2120572 + 22 minus22lowast lowast minus2120572 + 23 + 23119879 24119879 minus 23lowast lowast lowast minus24 minus 24119879lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
Mathematical Problems in Engineering 13
minus 1205821119883119879 + 119883119860119879 Ψ11015840 + 1205825119883119860119879 1205826119883119860119879 + 1205827119883119860119879 + 1205821119867119883119879 0minus1205822119883119879 Ψ21015840 1205822119867119883119879 0
minus1205823119883119879 + 25119879 Ψ31015840 + 26119879 1205823119867119883119879 + 27119879 + 28119879 0minus1205824119883119879 minus 25119879 Ψ41015840 minus 26119879 1205824119867119883119879 minus 27119879 minus 28119879 0
12057811989821 + 120572 (2 + 3) minus 119883 minus 119883119879 Ψ51015840 minus 1205825119883 119867119883119879 minus 1205826119883 minus 1205827119883 0lowast Ψ61015840 Ξ1015840 0lowast lowast 1205826119867119883119879 + 1205827119867119883119879 + 1205826119883119867119879 + 1205827119883119867119879 0lowast lowast lowast minus120583119868
]]]]]]]]]]]]]]]]]]]]]
Γ1 = 1205721198772Γ1 = 1205722Γ2 = 1205723
Ω11 = 1205721119879Ω12 = 1205721119879Ω21 = 1205722119879Ω22 = 1205722119879
1119879 = [11119879 12119879 13119879 14119879 15119879 16119879 17119879 18119879] 2119879 = [21119879 22119879 23119879 24119879 25119879 26119879 27119879 28119879]
1119879 = [11119879 12119879 13119879 14119879 15119879 16119879 17119879 18119879] 1198732119879 = [21119879 22119879 23119879 24119879 25119879 26119879 27119879 28119879]
Ξ = 1205826 (119861Θ0119884)119879 + 1205827 (119861Θ0119884)119879 + 1205825119867119883119879 minus 17119879 minus 18119879 + 17119879 + 18119879Ψ119894 = 120582119894119861Θ0119884 + 1119894 minus 1119894 (119894 = 1 2 3 4)
Ψ5 = 119861Θ0119884 + 1119894 minus 1119894Ψ6 = 1205825119861Θ0119884 + 1205825 (119861Θ0119884)119879 minus 11987216 minus 11987216119879 + 11987316 + 11987316119879
Ξ1015840 = 1205826 (119861Θ0119884)119879 + 1205827 (119861Θ0119884)119879 + 1205825119867119883119879 minus 27119879 minus 28119879 + 27119879 + 28119879Ψ1198941015840 = 120582119894119861Θ0119884 + 2119894 minus 2119894 (119894 = 1 2 3 4)
Ψ51015840 = 119861Θ0119884 + 2119894 minus 2119894Ψ61015840 = 1205825119861Θ0119884 + 1205825 (119861Θ0119884)119879 minus 26 minus 26119879 + 26 + 26119879
119863 = [1205821119863119879 1205822119863119879 1205823119863119879 1205824119863119879 119863119879 1205825119863119879 1205826119863119879 + 1205827119863119879 0]119879 119864 = [1198641119883119879 0 0 0 0 1198642Θ0119884 0 0]
119883 = [0 0 0 0 0 119883119879 0 0]119879 Π = [119883119879 0 0 0 0 0 0 0]
14 Mathematical Problems in Engineering
Θ = [(1205821119861Θ0119884)119879 (1205822119861Θ0119884)119879 (1205823119861Θ0119884)119879 (1205824119861Θ0119884)119879 (119861Θ0119884)119879 (1205825119861Θ0119884)119879 (1205826119861119884)119879 + (1205827119861119884)119879 0]119879 Δ = [(1205821119861Θ0)119879 (1205822119861Θ0)119879 (1205823119861Θ0)119879 (1205824119861Θ0)119879 (119861Θ0)119879 (1205825119861Θ0)119879 (1205826119861Θ0)119879 + (1205827119861Θ0)119879 0]119879
119884 = [0 0 0 0 0 119884 0 0] Σ = [0 0 0 0 0 Θ0119884 0 0]
(63)
then the 119867infin guaranteed cost control gain 119870 = 119884119883minus1198791198660minus1 canrendermodel (21) to be asymptotically stable with the119867infin normbound 120574 = radic120583 13e upper bound 1198690 of cost function 119869 is givenas
1198690 = 119909119879 (0) 119883minus1119883minus119879119909 (0)+ 120578119898 int0
minus120578119898
int0119904
1199091015840119879 (120591) 119883minus11119883minus1198791199091015840 (120591) 119889119904119889120591+ intminus120578119898minus1205781
int0119904
1199091015840119879 (120591) 119883minus12119883minus1198791199091015840 (120591) 119889119904119889120591+ intminus1205781minus120578119872
int0119904
1199091015840119879 (120591) 119883minus13119883minus1198791199091015840 (120591) 119889119904119889120591
(64)
Proof The proof is based on a suitable transformation anda change of variables allowing us to obtain inequality (24)in Theorem 8 First we define 1198805 = 1198800 119880119894 = 1205821198941198800 (119894 =from 1 to 4) 1198806 = 12058251198800 in (24) Because we consider thedimension of state119909is equal to that of outside disturbance120596 in this paper we can also define 1198807 = 12058261198800 1198808 =12058271198800 Obviously (24) implies 1198805 gt 0 so 1198800 is nonsingularThen using the analysis method of D Yue [40] and Z Wang[41] pre- and postmultiplying both sides of inequality (24)with diag(119868 119868 119868 119883 119868 119883 119868 119868 119868) and its transpose where = diag(119883 119883 119883 119883 119883 119883 119883 119883) and 119883 = 1198800minus1 introducingnew variables 119883119875119883119879 = 119883119877119895119883119879 = 119895 (119895 = 1 2 3)119883119872119897120573119883119879 = 119897120573 119883119873119897120573119883119879 = 119897120573 (119897 = 1 2 120573 = 1 2 sdot sdot sdot 8)1198701198660119883119879 = 119884 and 120583 = 1205742 From the definition of 1198660 we know1198660 is invertible so 119870 can be obtained by calculating 119870 =119884119883minus1198791198660minus1 It is easy to see that 10 and (64) respectively imply(24) and (26) Therefore from Theorem 8 we can completethe proof
To obtain the optimal bound 119869lowast shown in (26) thecommonly used method is to consider it as an optimizationproblem like [42] in which the expression of initial state 119909(119905)(119905 isin [minus120578119872 0]) needs to be known The expression of initialstate is not given in this paper Therefore the optimizationmethod used in [42] cannot be used here A practical methodto obtain 119869lowast also used by D Yue [43] is employed as follows
Suppose 1199091015840(119905) is bounded if 119905 isin [minus120578119872 0] and satisfying1199091015840119879(120591)1199091015840(120591) le ℓ In addition suppose that there exists 120573119894 gt0 (119894 = 1 2 3) satisfying119883minus1119894119883minus119879 le 120573119894119868 119894 = 1 2 3119883minus1119883minus119879 le 1205734119868 (65)
Inserting this into (64) we have
1198690 le 1205734119909119879 (0) 119909 (0) + 05ℓ12057311205781198983 + 05ℓ1205732 (12057812 minus 1205781198982)+ 05ℓ1205733 (1205781198722 minus 12057812) = 119869lowast (66)
Applying the Schur complement to the inequalities above wehave
[minus120573119894119868 119883minus1lowast minus119877119894minus1] lt 0 119894 = 1 2 3
[minus1205734119868 119883minus1lowast minus119875minus1] lt 0
(67)
Then combining 10 and (67) 119894minus1 119894 (119894 = 1 2 3)minus1 119883minus1 119883 exist simultaneously We cannot directly usethe LMI tools to solve the problem Defining 119894minus1 = 119894(119894 = 1 2 3) minus1 = 119883minus1 = and using the idea of thecone complementary linearization algorithm the guaranteedcost fault-tolerant controller of system (21) and the value ofoptimal performance indicator 119869lowast can be obtained in thefollowing method
Minimize 119905119903119886119888119890 (11 + 22 + 33 + + )+ 1205734 + 0512057311205781198983 + 051205732 (12057812 minus 1205781198982)+ 051205733 (1205781198722 minus 12057812)
Subject to 119868119899119890119902119906119886119897119894119905119894119890119904 (62) [minus120573119894119868
lowast minus119894] lt 0 (119894 = 1 2 3)
[minus1205734119868 lowast minus] lt 0
[119883 119868lowast ] ge 0
[1 119868lowast 1] ge 0
[2 119868lowast 2] ge 0
Mathematical Problems in Engineering 15
[3 119868lowast 3] ge 0
[ 119868lowast ] ge 0
119894 gt 0 (119894 = 1 2 3) (68)
5 Simulations
Example 11 Consider inverted pendulum model that canusually be modelled as (1) and the system parameters aregiven as follows
119860 = [minus2 1110 4 ]
119861 = [01minus4]
119862 = [minus03151 01011 03]
119867 = [015 minus056minus01 032 ]
Δ119860 = [004 sin 119905 015 sin 119905minus02 sin 119905 075 sin 119905]
Δ119861 = [002 sin 119905minus01 sin 119905]
119863 = [ 01minus05]
119865 (119905) = sin 119905
(69)
Therefore we have
1198641 = [04 15] 1198642 = 02 (70)
For this simulation the initial state of system is assumed119909(0) = [2 minus1]119879 and the external disturbance is considered as120596(119905) = [015 minus05]119879 3119904 le 119905 le 4119904
0 119900119905ℎ119890119903119904 Here we take the upper
bound of time-varying delay as 120578119872 = 03119904 and its lower boundas 120578119898 = 0119904 namely 0 le 120578(119905) le 03 In addition the faultbounds of the system are given in Table 1
Table 1 The bounds of faults
Symbol Upper bound Lower boundActuatorfaultsΘ 136 009
SensorFaults119866
[[
165 00 175]
][[
0 00 015]
]
minus01
0
01
02
03
04
05
Del
ay
1 2 3 4 5 60Time s
Figure 2 The time-varying delay in double-fault NCS
We choose the parameters as follows
1205821 = 011205822 = 0151205823 = minus0641205824 = 031205825 = 1205826 = 0351205827 = 181198782 = 0311205881 = 30001205882 = 22032ℓ = 1
1198781 = [10013 00 9207]
(71)
By taking advantage of the LMI tool box and inserting theabove parameters into inequalities 10 and (68) we can obtainthe 119867infin guaranteed cost control gain
119870 = 119884119883minus1198791198660minus1 = [85163 151398] (72)
with 120574 = radic120583 = 1952516The corresponding optimal performance indicator (the
upper bound value of guaranteed cost function) is 119869lowast =83162563The time-varying delay is shown in Figure 2 In Figure 3
(a) is the actuator fault which is a piecewise-linear function
16 Mathematical Problems in Engineering
002040608
1121416
Actu
ator
faul
t
1 2 3 4 5 60Time s
(a) Time-varying actuator fault
minus020
02040608
112141618
Sens
or fa
ult
1 2 3 4 5 60Time s
(b) Time-varying sensor fault
Figure 3 The time-varying faults
x1
x2
1 2 3 4 5 60Time s
minus15
minus1
minus05
0
05
1
15
2
Stat
e X
Figure 4 The state response curve of double-fault NCS
1 2 3 4 5 60Time s
minus8minus7minus6minus5minus4minus3minus2minus1
012
Con
trol i
nput
Figure 5 The control input of double-fault NCS
It keeps the minimum value from 13119904 to 17119904 while it keepsthe maximum value from 37119904 to 43119904 The sensor faults areshown as (b) which is sinusoidal It should be noted thatthe green dotted line represents the fault of sensor 1 whilethe blue solid line represents the fault of sensor 2 Throughthe state response of the double-fault NCS shown in Figure 4and corresponding control signal shown in Figure 5 we know
x1
x2
1 2 3 4 5 60Time s
minus8
minus6
minus4
minus2
0
2
4
6
Stat
e X
Figure 6 The state response curve of double-fault NCS
the 119867infin guaranteed cost controller designed in this paper isable to make the double-fault NCS asymptotically stable Thesystem gets preliminarily steady at 2119904 and its state can returnto the equilibrium position in a certain period of time whenthe NCS is affected by external disturbance Compared withthe state response of worse stability shown in Figure 6 whenthe method proposed in [28] is used for this double-faultproblem it sufficiently proves the effectiveness and feasibilityof the method proposed in this paper
To better illustrate the effectiveness of the method pro-posed in this paper the following example is presented
Example 12 Consider the parameters of system (1) as follows
119860 = [[[[[[
021 0 035 10 minus53 minus586 323
365 minus11 minus156 minus0890 0 minus158 minus285
]]]]]]
119861 = [559 12 minus089 13]119879 119862 = [17 02 015 minus018]
Mathematical Problems in Engineering 17
minus15
minus1
minus05
0
05
1
15
Stat
e X1 2 3 4 5 6 7 8 9 100
Time s
R1R2
R3R4
Figure 7 The state response curve of double-fault NCS
Δ119860 = [[[[
082 sin 119905 0 0 00 012 sin 119905 0 00 0 minus058 sin 119905 00 0 0 101 sin 119905]]]]
Δ119861 = [[[[
minus015 sin 119905008 sin 1199050minus028 sin 119905]]]]
119867 = [[[[
minus041 096 052 0006 minus057 0 021121 0 059 0minus032 minus011 minus035 minus003]]]]
119863 = 1198684times4119865 (119905) = diag (sin 119905 sin 119905 sin 119905 sin 119905)
(73)
Therefore we have
1198641 = diag (082 012 minus058 101) 1198642 = [minus015 008 0 minus028]119879 (74)
For this simulation the initial state of system is assumedas 119909(0) = [121 minus051 023 minus018]119879 and the externaldisturbance is considered as
120596 (119905) = [015 cos 119905 015 cos 119905 minus012 sin 119905 minus025 cos 119905]119879 6119904 le 119905 le 81199040 119900119905ℎ119890119903119904 (75)
The uncertain time-varying delay satisfies 0 le 120578(119905) le023119904 In addition the fault bounds of the system are givenin Table 2 Other parameters are selected as follows
1205821 = 121205822 = minus2031205823 = 1681205824 = minus231205825 = minus1051205826 = 6051205827 = 5121198781 = diag (19888 15634 8709 12876) 1198782 = 586
1205881 = 57981205882 = 1879ℓ = 1
(76)
By taking advantage of the LMI tool box and submittingthese parameters above into inequalities 10 and (68) we canobtain the 119867infin guaranteed cost control gain
119870 = 119884119883minus1198791198660minus1= [minus17256 15512 minus08571 07451]
with 120574 = radic120583 = 5819806(77)
The corresponding optimal performance indicator is 119869lowast =65021047 From the state response shown in Figure 7 andcontrol signal shown in Figure 8 we undoubtedly know
18 Mathematical Problems in Engineering
Table 2 The bounds of faults
Symbol Upper bound Lower boundActuatorfaultsΘ 150 012
SensorFaults119866
[[[[[[[[
185 0 0 00 160 0 00 0 125 00 0 0 165
]]]]]]]]
[[[[[[[[
025 0 0 00 0 0 00 0 0 00 0 0 015
]]]]]]]]
minus4
minus3
minus2
minus1
0
1
2
Con
trol i
nput
1 2 3 4 5 6 7 8 9 100Time s
Figure 8 The control input of double-fault NCS
the double-fault NCS is asymptotically stable when the 119867infinguaranteed cost controller is used This further demonstratesthe feasibility and effectiveness of the method proposed inthis paper
6 Conclusions
The issues of modelling and 119867infin guaranteed cost fault-tolerant control of double-fault networked control systemshave been addressedThe closed-loopmodel of a double-faultNCS is set up with regard to the influences of transmissiondelay packet dropout uncertain parameters and externaldisturbance In addition the piecewise delay method is pro-posed to reduce the conservatism when analysing the delay-dependent faulty system With the help of Lee Y Srsquos lemmathe sufficient condition of guaranteed cost fault-tolerantfor time-varying double-fault NCS is introduced using theLyapunov-Krasovskii theory and weighted technology Themethod of designing a guaranteed cost fault-tolerant con-troller for this NCS is given based on LMI Our next researchtask will be choosing more reasonable values of parameters120582119894 (119894 = 1 2 3 4 5 6 7) to reduce the conservatism further Ofcourse the study on scheduling policy of double-fault NCS isalso a challenge but indispensable work
Data Availability
The data used in this paper can be got by simulations
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was partly supported by National Nature Sci-ence Foundation of China under Grants 51875380 51375323and 61563022 Cooperative Innovation Fund-Prospective ofJiangsu Province under Grant BY2016044-01Major Programof Natural Science Foundation of Jiangxi Province Chinaunder Grant 20152ACB20009 High Level Talents of ldquoSix Tal-ent Peaksrdquo in Jiangsu Province China under Grant DZXX-046
References
[1] H Zhang Y Shi J Wang and H Chen ldquoA New Delay-compensation Scheme for Networked Control Systems inController Area Networksrdquo IEEE Transactions on IndustrialElectronics vol 65 no 9 pp 7239ndash7247 2018
[2] A Da Silva and C Kawan ldquoRobustness of critical bit rates forpractical stabilization of networked control systemsrdquo Automat-ica vol 93 pp 397ndash406 2018
[3] Q Zhu K Lu and Y Zhu ldquoGuaranteed cost control ofnetworked control systems under transmission control protocolwith active queue managementrdquo Asian Journal of Control vol18 no 4 pp 1546ndash1557 2016
[4] Q Zhu K Lu and Y Zhu ldquoHinfin Guaranteed Cost Control forNetworked Control Systems under Scheduling Policy Based onPredicted Errorrdquo Mathematical Problems in Engineering vol2014 Article ID 586029 12 pages 2014
[5] W H Chen J X Xu and Z H Guan ldquoGuaranteed cost controlfor uncertain Markovian jump systems with mode-dependenttime-delaysrdquo IEEE Transactions on Automatic Control vol 48no 12 pp 2270ndash2277 2003
[6] HM Soliman A DabroumM S Mahmoud andM SolimanldquoGuaranteed-cost reliable control with regional pole placementof a power systemrdquo Journal of 13e Franklin Institute vol 348no 5 pp 884ndash898 2011
[7] X Li and X-B Wu ldquoGuaranteed cost fault-tolerant controllerdesign of networked control systems under variable-periodsamplingrdquo Information Technology Journal vol 8 no 4 pp 537ndash543 2009
[8] L Zhang and G Orosz ldquoMotif-Based Design for ConnectedVehicle Systems in Presence of Heterogeneous ConnectivityStructures and Time Delaysrdquo IEEE Transactions on IntelligentTransportation Systems vol 17 no 6 pp 1638ndash1651 2016
[9] Z Li G Guo and Z Liu ldquoCommunication parameter designfor networked control systems with the slotted ALOHA accessprotocolrdquo Information Sciences vol 447 pp 205ndash215 2018
[10] K Lu G Jing and L Wang ldquoDistributed algorithm for solv-ing convex inequalitiesrdquo Institute of Electrical and ElectronicsEngineers Transactions on Automatic Control vol 63 no 8 pp2670ndash2677 2018
[11] Q Zhu K Lu and Y Zhu ldquoObserver-based feedback controlof networked control systems with delays and packet dropoutsrdquoJournal of Dynamic SystemsMeasurement andControl vol 138no 2 pp 1ndash8 2016
Mathematical Problems in Engineering 19
[12] Y Li H Li and W Sun ldquoEvent-triggered control for robust setstabilization of logical control networksrdquo Automatica vol 95pp 556ndash560 2018
[13] X Luan P Shi and F Liu ldquoStabilization of networked controlsystems with random delaysrdquo IEEE Transactions on IndustrialElectronics vol 58 no 9 pp 4323ndash4330 2011
[14] Y Zhang and J Jiang ldquoBibliographical review on reconfigurablefault-tolerant control systemsrdquo Annual Reviews in Control vol32 no 2 pp 229ndash252 2008
[15] N H Ei-Farra A Gani and P D Christofides ldquoFault-tolerantcontrol of process systems using communication networksrdquoAIChE Journal vol 51 no 6 pp 1665ndash1682 2005
[16] H R Karimi and H Gao ldquoNew delay-dependent exponentialHinfin synchronization for uncertain neural networks withmixedtime delaysrdquo IEEE Transactions on Systems Man and Cybernet-ics Part B Cybernetics vol 40 no 1 pp 173ndash185 2010
[17] Y N Guo Q Y Zhang D W Gong and J H Zhang ldquoRobustfault-tolerant control of networked control systems with time-varying delaysrdquoControl andDecision vol 23 no 6 pp 689ndash6922008
[18] Z Mao and B Jiang ldquoFault identification and fault-tolerantcontrol for a class of networked control systemsrdquo InternationalJournal of Innovative Computing Information and Control vol3 no 5 pp 1121ndash1130 2007
[19] C-X Yang Z-H Guan and J Huang ldquoStochastic fault tolerantcontrol of networked control systemsrdquo Journal of 13e FranklinInstitute vol 346 no 10 pp 1006ndash1020 2009
[20] Z Mao Y Pan B Jiang and W Chen ldquoFault Detectionfor a Class of Nonlinear Networked Control Systems withCommunication Constraintsrdquo International Journal of ControlAutomation and Systems vol 16 no 1 pp 256ndash264 2018
[21] A Qiu J Gu C Wen and J Zhang ldquoSelf-triggered faultestimation and fault tolerant control for networked controlsystemsrdquo Neurocomputing vol 272 no 1 pp 629ndash637 2018
[22] Q Zhu K Lu G Xie and Y Zhu ldquoGuaranteed Cost Fault-Tolerant Control for Networked Control Systems with SensorFaultsrdquoMathematical Problems in Engineering vol 2015 ArticleID 549347 9 pages 2015
[23] W Wu and Y Zhang ldquoEvent-triggered fault-tolerant controland scheduling codesign for nonlinear networked control sys-tems with medium-access constraint and packet disorderingrdquoInternational Journal of Robust and Nonlinear Control vol 28no 4 pp 1182ndash1198 2018
[24] X Xiao and X-J Li ldquoAdaptive dynamic programming method-based synchronisation control of a class of complex dynamicalnetworks with unknown dynamics and actuator faultsrdquo IETControl 13eory amp Applications vol 12 no 2 pp 291ndash298 2018
[25] PMhaskar AGani CMcFall PDChristofides and J FDavisldquoFault-tolerant control of nonlinear process systems subject tosensor faultsrdquo AIChE Journal vol 53 no 3 pp 654ndash668 2007
[26] M Liu P Shi L Zhang and X Zhao ldquoFault-tolerant controlfor nonlinear Markovian jump systems via proportional andderivative sliding mode observer techniquerdquo IEEE Transactionson Circuits and Systems I Regular Papers vol 58 no 11 pp2755ndash2764 2011
[27] S Li D Sauter C Aubrun and J Yame ldquoStability guaranteedactive fault-tolerant control of networked control systemsrdquoJournal of Control Science and Engineering vol 2008 Article ID189064 9 pages 2008
[28] X Y Luo M J Shang C L Chen and X P Guan ldquoGuaranteedcost active fault-tolerant control of networked control system
with packet dropout and transmission delayrdquo InternationalJournal of Automation and Computing vol 7 no 4 pp 509ndash5152010
[29] Q Zhu B Xie and Y Zhu ldquoGuaranteed Cost Control forMultirate Networked Control Systems with Both Time-Delayand Packet-Dropoutrdquo Mathematical Problems in Engineeringvol 2014 Article ID 637329 9 pages 2014
[30] R Manivannan R Samidurai J Cao and M Perc ldquoDesign ofResilient Reliable Dissipativity Control for Systems with Actu-ator Faults and Probabilistic Time-Delay Signals via Sampled-Data Approachrdquo IEEE Transactions on Systems Man andCybernetics Systems 2018
[31] R Manivannan R Samidurai J Cao A Alsaedi and F EAlsaadi ldquoNon-Fragile Extended Dissipativity Control Designfor Generalized Neural Networks with Interval Time-DelaySignalsrdquo Asian Journal of Control 2019
[32] Q Gao and N Olgac ldquoBounds of imaginary spectra of LTIsystems in the domain of two of the multiple time delaysrdquoAutomatica vol 72 pp 235ndash241 2016
[33] Q Gao A S Kammer U Zalluhoglu and N Olgac ldquoCriticaleffects of the polarity change in delayed states within anLTI dynamics with multiple delaysrdquo Institute of Electrical andElectronics Engineers Transactions onAutomatic Control vol 60no 11 pp 3018ndash3022 2015
[34] Q Gao Z Zhang and C Yang ldquoSign inverting control andits important properties for multiple time-delayed systemsrdquo inProceedings of the 10th ASME Dynamic Systems and ControlConference pp 979ndash984 Virginia USA 2017
[35] Y M Zhang and J Jiang ldquoActive fault-tolerant control systemagainst partial actuator failuresrdquo IEE Proceedings Control13eoryand Applications vol 149 no 1 pp 95ndash104 2002
[36] G Garcia J Bernussou andD Arzelier ldquoRobust stabilization ofdiscrete-time linear systems with norm-bounded time-varyinguncertaintyrdquo Systems amp Control Letters vol 22 no 5 pp 327ndash339 1994
[37] Y Wang L Xie and C E de Souza ldquoRobust control of a classof uncertain nonlinear systemsrdquo Systems amp Control Letters vol19 no 2 pp 139ndash149 1992
[38] D Yue E Tian and Y Zhang ldquoA piecewise analysis methodto stability analysis of linear continuousdiscrete systems withtime-varying delayrdquo International Journal of Robust and Non-linear Control vol 19 no 13 pp 1493ndash1518 2009
[39] X-J Jing D-L Tan and Y-C Wang ldquoAn LMI approach tostability of systems with severe time-delayrdquo IEEE Transactionson Automatic Control vol 49 no 7 pp 1192ndash1195 2004
[40] D Yue Q-L Han and J Lam ldquoNetwork-based robust Hinfincontrol of systems with uncertaintyrdquo Automatica vol 41 no 6pp 999ndash1007 2005
[41] Z Wang F Yang D W C Ho and X Liu ldquoRobust Hinfincontrol for networked systemswith randompacket lossesrdquo IEEETransactions on Systems Man and Cybernetics Part B vol 37no 4 pp 916ndash924 2007
[42] M S Mahmoud ldquoControl of uncertain state-delay systemsguaranteed cost approachrdquo IMA Journal of Mathematical Con-trol and Information vol 18 no 1 pp 109ndash128 2001
[43] D Yue C Peng andG Y Tang ldquoGuaranteed cost control of lin-ear systems over networks with state and input quantisationsrdquoIEE Proceedings Control 13eory and Applications vol 153 no 6pp 658ndash664 2006
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Mathematical Problems in Engineering 11
Because 120596(119905) isin 1198712[0 infin) we have1003817100381710038171003817119910 (119905)1003817100381710038171003817 le 120574 120596 (119905)119879 (55)
It is known that model (21) is asymptotically stable with the119867infin norm bound 120574Moreover according to (39) and (41) we have
V1015840 (119905) le minus119909119879 (119905) 1198781119909 (119905)minus [Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) 119909 (119905 minus 120578 (119905))]119879
sdot 1198782Θ0 (119868 + Γ) 1198701198660 (119868 + 119871) 119909 (119905 minus 120578 (119905))(56)
Through the integral operation it can be determined that119869 le V(0) In addition by inserting 119905 = 0 into the Lyapunov-Krasovskii function shown as expression (28) the upperbound of cost function 119869 can be obtained and shown asexpression (26) Therefore the theorem is verified if 119897 = 1Case 2 If 120578(119905) isin [1205781 120578119872] weighted technology based on theprinciple of Newton-Leibniz is introduced as follows
2 [120576119879 (119905) 120596119879 (119905)] 1198722 [119909 (119905 minus 1205781) minus 119909 (119905 minus 120578 (119905))minus int119905minus1205781119905minus120578(119905)
1199091015840119879 (119904) 119889119904] = 0(57)
2 [120576119879 (119905) 120596119879 (119905)] 1198732 [119909 (119905 minus 120578 (119905)) minus 119909 (119905 minus 120578119872)minus int119905minus120578(119905)119905minus120578119872
1199091015840119879 (119904) 119889119904] = 0(58)
Because 1198773 gt 0 we have
minus 2 [120576119879 (119905) 120596119879 (119905)] 1198722 int119905minus1205781119905minus120578(119905)
1199091015840 (119904) 119889119904 le (120578 (119905) minus 1205781)sdot [120576119879 (119905) 120596119879 (119905)] 1198722119877minus13 1198722119879 [120576119879 (119905) 120596119879 (119905)]119879+ int119905minus1205781119905minus120578(119905)
1199091015840119879 (119904) 11987731199091015840 (119904) 119889119904(59)
minus 2 [120576119879 (119905) 120596119879 (119905)] 1198732 int119905minus120578(119905)119905minus120578119872
1199091015840 (119904) 119889119904 le (120578119872 minus 120578 (119905))sdot [120576119879 (119905) 120596119879 (119905)] 1198732119877minus13 1198731119879 [120576119879 (119905) 120596119879 (119905)]119879+ int119905minus120578(119905)119905minus120578119872
1199091015840119879 (119904) 11987731199091015840 (119904) 119889119904(60)
Therefore
minus 2 [120576119879 (119905) 120596119879 (119905)] 1198722 int119905minus1205781119905minus120578(119905)
1199091015840 (119904) 119889119904
minus 2 [120576119879 (119905) 120596119879 (119905)] 1198732 int119905minus120578(119905)119905minus120578119872
1199091015840 (119904) 119889119904le (120578 (119905) minus 1205781)sdot [120576119879 (119905) 120596119879 (119905)] 1198722119877minus13 1198722119879 [120576119879 (119905) 120596119879 (119905)]119879+ (120578119872 minus 120578 (119905))sdot [120576119879 (119905) 120596119879 (119905)] 1198732119877minus13 1198732119879 [120576119879 (119905) 120596119879 (119905)]119879
+ int119905minus1205781119905minus120578119872
1199091015840119879 (119904) 11987731199091015840 (119904) 119889119904
(61)
In addition 119910119879(119905)119910(119905)minus1205742120596119879(119905)120596(119905) both on the left and rightsides of equality (29) and 119909119879(119905)1198781119909(119905) + [Θ0(119868 + Γ)1198701198660(119868 +119871)119909(119905minus120578(119905))]1198791198782Θ0(119868+Γ)1198701198660(119868+119871)119909(119905minus120578(119905)) on the right sideof equal sign ldquo=rdquo By inserting (30) (31) (57) (58) and (61)into the obtained inequality the item minus int119905minus1205781
119905minus1205781198721199091015840119879(119904)11987731199091015840(119904)119889119904
can be offset while the item minus int119905minus120578119898119905minus1205781
1199091015840119879(119904)11987721199091015840(119904)119889119904 is offsetin Case 1 Then in the same methods of transformation asCase 1 the inequality (24) when 119897 = 2 can be obtainedTherefore the proof is complete
Remark 9 In the two different cases a variational weightingmatrix and Jessenrsquos inequalities are used to derive the 119867infinguaranteed cost fault-tolerant condition of the system inwhich more delay information is employed to reduce theconservatism
The next section will provide sufficient conditions fordesigning the guaranteed cost fault-tolerant control for adouble-fault NCS
4 Guaranteed Cost Fault-Tolerant Control ofDouble-Fault NCS
Inequality (24) is not linear with respect to the gain matricesof the controller so it is needs to be reformulated into LMIsvia a change of variables
Theorem 10 Given symmetric positive definite matrices 1198781and 1198782 a set of constant 120578119898 120578119872 1205881 gt 0 1205882 gt 0 120582119894 (119894 = from1 to 7) and 120572 = (120578119872 minus 120578119898)2 If there exists a set of symmetricpositive definite matrices 119895 (119895 = 1 2 3)119883 andmatrix gt 0as well as matrices 1120573 2120573 1120573 2120573 (120573 =from 1 to 8)
12 Mathematical Problems in Engineering
119884 and a set of constants 120576 gt 0 and 120583 gt 0 satisfying theLMIs
[[[[[[[[[[[[[[[[[[[[[[[[[[
minus120576119868 0 0 0 120576119863119879lowast minus (1198781 + 119862119879119862)minus1 0 0 Πlowast lowast minus1198782minus1 0 Σlowast lowast lowast minusΓ119897 Ω119897119896lowast lowast lowast lowast Φ119897lowast lowast lowast lowast lowastlowast lowast lowast lowast lowastlowast lowast lowast lowast lowastlowast lowast lowast lowast lowastlowast lowast lowast lowast lowast
0 0 0 0 00 0 0 0 00 Θ0119884 0 Θ0 00 0 0 0 0
119864119879 Θ 119883 Δ 119884119879minus120576119868 1198642Θ0119884 0 1198642Θ0 0lowast minus1205881119883119879 0 0 119884119879lowast lowast minus1205881minus1119883 0 0lowast lowast lowast minus1205882119868 0lowast lowast lowast lowast minus1205882minus1119868
]]]]]]]]]]]]]]]]]]]]]]
lt 0
119897 = 1 2 119896 = 1 2(62)
where
Φ1 =
[[[[[[[[[[[[[[[[[[[[[
minus1 + 1205821119860119883119879 + 1205821119883119860119879 1 + 1205822119883119860119879 + 11 1205823119883119860119879 minus 11 1205824119883119860119879lowast minus1 + 12 + 12119879 13119879 minus 12 14119879lowast lowast minus3120572 minus 12 minus 12119879 3120572 minus 14119879lowast lowast lowast minus3120572lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
minus 1205821119883119879 + 119883119860119879 Ψ1 + 1205825119883119860119879 1205826119883119860119879 + 1205827119883119860119879 + 1205821119867119883119879 0minus1205822119883119879 + 15119879 Ψ2 + 16119879 1205822119867119883119879 + 17119879 + 18119879 0minus1205823119883119879 minus 15119879 Ψ3 minus 16119879 1205823119867119883119879 minus 17119879 minus 18119879 0
minus1205824119883119879 Ψ4 1205824119867119883119879 012057811989821 + 120572 (2 + 3) minus 119883119879 minus 119883 Ψ5 minus 1205825119883 119867119883119879 minus 1205826119883 minus 1205827119883 0
lowast Ψ6 Ξ 0lowast lowast 1205826119867119883119879 + 1205827119867119883119879 + 1205826119883119867119879 + 1205827119883119867119879 0lowast lowast lowast minus120583119868
]]]]]]]]]]]]]]]]]
Φ2 =
[[[[[[[[[[[[[[[[[[[[[
minus1 + 1205821119860119883119879 + 1205821119883119860119879 1 + 1205822119883119860119879 1205823119883119860119879 + 21 1205824119883119860119879 minus 21lowast minus1 minus 2120572 2120572 + 22 minus22lowast lowast minus2120572 + 23 + 23119879 24119879 minus 23lowast lowast lowast minus24 minus 24119879lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
Mathematical Problems in Engineering 13
minus 1205821119883119879 + 119883119860119879 Ψ11015840 + 1205825119883119860119879 1205826119883119860119879 + 1205827119883119860119879 + 1205821119867119883119879 0minus1205822119883119879 Ψ21015840 1205822119867119883119879 0
minus1205823119883119879 + 25119879 Ψ31015840 + 26119879 1205823119867119883119879 + 27119879 + 28119879 0minus1205824119883119879 minus 25119879 Ψ41015840 minus 26119879 1205824119867119883119879 minus 27119879 minus 28119879 0
12057811989821 + 120572 (2 + 3) minus 119883 minus 119883119879 Ψ51015840 minus 1205825119883 119867119883119879 minus 1205826119883 minus 1205827119883 0lowast Ψ61015840 Ξ1015840 0lowast lowast 1205826119867119883119879 + 1205827119867119883119879 + 1205826119883119867119879 + 1205827119883119867119879 0lowast lowast lowast minus120583119868
]]]]]]]]]]]]]]]]]]]]]
Γ1 = 1205721198772Γ1 = 1205722Γ2 = 1205723
Ω11 = 1205721119879Ω12 = 1205721119879Ω21 = 1205722119879Ω22 = 1205722119879
1119879 = [11119879 12119879 13119879 14119879 15119879 16119879 17119879 18119879] 2119879 = [21119879 22119879 23119879 24119879 25119879 26119879 27119879 28119879]
1119879 = [11119879 12119879 13119879 14119879 15119879 16119879 17119879 18119879] 1198732119879 = [21119879 22119879 23119879 24119879 25119879 26119879 27119879 28119879]
Ξ = 1205826 (119861Θ0119884)119879 + 1205827 (119861Θ0119884)119879 + 1205825119867119883119879 minus 17119879 minus 18119879 + 17119879 + 18119879Ψ119894 = 120582119894119861Θ0119884 + 1119894 minus 1119894 (119894 = 1 2 3 4)
Ψ5 = 119861Θ0119884 + 1119894 minus 1119894Ψ6 = 1205825119861Θ0119884 + 1205825 (119861Θ0119884)119879 minus 11987216 minus 11987216119879 + 11987316 + 11987316119879
Ξ1015840 = 1205826 (119861Θ0119884)119879 + 1205827 (119861Θ0119884)119879 + 1205825119867119883119879 minus 27119879 minus 28119879 + 27119879 + 28119879Ψ1198941015840 = 120582119894119861Θ0119884 + 2119894 minus 2119894 (119894 = 1 2 3 4)
Ψ51015840 = 119861Θ0119884 + 2119894 minus 2119894Ψ61015840 = 1205825119861Θ0119884 + 1205825 (119861Θ0119884)119879 minus 26 minus 26119879 + 26 + 26119879
119863 = [1205821119863119879 1205822119863119879 1205823119863119879 1205824119863119879 119863119879 1205825119863119879 1205826119863119879 + 1205827119863119879 0]119879 119864 = [1198641119883119879 0 0 0 0 1198642Θ0119884 0 0]
119883 = [0 0 0 0 0 119883119879 0 0]119879 Π = [119883119879 0 0 0 0 0 0 0]
14 Mathematical Problems in Engineering
Θ = [(1205821119861Θ0119884)119879 (1205822119861Θ0119884)119879 (1205823119861Θ0119884)119879 (1205824119861Θ0119884)119879 (119861Θ0119884)119879 (1205825119861Θ0119884)119879 (1205826119861119884)119879 + (1205827119861119884)119879 0]119879 Δ = [(1205821119861Θ0)119879 (1205822119861Θ0)119879 (1205823119861Θ0)119879 (1205824119861Θ0)119879 (119861Θ0)119879 (1205825119861Θ0)119879 (1205826119861Θ0)119879 + (1205827119861Θ0)119879 0]119879
119884 = [0 0 0 0 0 119884 0 0] Σ = [0 0 0 0 0 Θ0119884 0 0]
(63)
then the 119867infin guaranteed cost control gain 119870 = 119884119883minus1198791198660minus1 canrendermodel (21) to be asymptotically stable with the119867infin normbound 120574 = radic120583 13e upper bound 1198690 of cost function 119869 is givenas
1198690 = 119909119879 (0) 119883minus1119883minus119879119909 (0)+ 120578119898 int0
minus120578119898
int0119904
1199091015840119879 (120591) 119883minus11119883minus1198791199091015840 (120591) 119889119904119889120591+ intminus120578119898minus1205781
int0119904
1199091015840119879 (120591) 119883minus12119883minus1198791199091015840 (120591) 119889119904119889120591+ intminus1205781minus120578119872
int0119904
1199091015840119879 (120591) 119883minus13119883minus1198791199091015840 (120591) 119889119904119889120591
(64)
Proof The proof is based on a suitable transformation anda change of variables allowing us to obtain inequality (24)in Theorem 8 First we define 1198805 = 1198800 119880119894 = 1205821198941198800 (119894 =from 1 to 4) 1198806 = 12058251198800 in (24) Because we consider thedimension of state119909is equal to that of outside disturbance120596 in this paper we can also define 1198807 = 12058261198800 1198808 =12058271198800 Obviously (24) implies 1198805 gt 0 so 1198800 is nonsingularThen using the analysis method of D Yue [40] and Z Wang[41] pre- and postmultiplying both sides of inequality (24)with diag(119868 119868 119868 119883 119868 119883 119868 119868 119868) and its transpose where = diag(119883 119883 119883 119883 119883 119883 119883 119883) and 119883 = 1198800minus1 introducingnew variables 119883119875119883119879 = 119883119877119895119883119879 = 119895 (119895 = 1 2 3)119883119872119897120573119883119879 = 119897120573 119883119873119897120573119883119879 = 119897120573 (119897 = 1 2 120573 = 1 2 sdot sdot sdot 8)1198701198660119883119879 = 119884 and 120583 = 1205742 From the definition of 1198660 we know1198660 is invertible so 119870 can be obtained by calculating 119870 =119884119883minus1198791198660minus1 It is easy to see that 10 and (64) respectively imply(24) and (26) Therefore from Theorem 8 we can completethe proof
To obtain the optimal bound 119869lowast shown in (26) thecommonly used method is to consider it as an optimizationproblem like [42] in which the expression of initial state 119909(119905)(119905 isin [minus120578119872 0]) needs to be known The expression of initialstate is not given in this paper Therefore the optimizationmethod used in [42] cannot be used here A practical methodto obtain 119869lowast also used by D Yue [43] is employed as follows
Suppose 1199091015840(119905) is bounded if 119905 isin [minus120578119872 0] and satisfying1199091015840119879(120591)1199091015840(120591) le ℓ In addition suppose that there exists 120573119894 gt0 (119894 = 1 2 3) satisfying119883minus1119894119883minus119879 le 120573119894119868 119894 = 1 2 3119883minus1119883minus119879 le 1205734119868 (65)
Inserting this into (64) we have
1198690 le 1205734119909119879 (0) 119909 (0) + 05ℓ12057311205781198983 + 05ℓ1205732 (12057812 minus 1205781198982)+ 05ℓ1205733 (1205781198722 minus 12057812) = 119869lowast (66)
Applying the Schur complement to the inequalities above wehave
[minus120573119894119868 119883minus1lowast minus119877119894minus1] lt 0 119894 = 1 2 3
[minus1205734119868 119883minus1lowast minus119875minus1] lt 0
(67)
Then combining 10 and (67) 119894minus1 119894 (119894 = 1 2 3)minus1 119883minus1 119883 exist simultaneously We cannot directly usethe LMI tools to solve the problem Defining 119894minus1 = 119894(119894 = 1 2 3) minus1 = 119883minus1 = and using the idea of thecone complementary linearization algorithm the guaranteedcost fault-tolerant controller of system (21) and the value ofoptimal performance indicator 119869lowast can be obtained in thefollowing method
Minimize 119905119903119886119888119890 (11 + 22 + 33 + + )+ 1205734 + 0512057311205781198983 + 051205732 (12057812 minus 1205781198982)+ 051205733 (1205781198722 minus 12057812)
Subject to 119868119899119890119902119906119886119897119894119905119894119890119904 (62) [minus120573119894119868
lowast minus119894] lt 0 (119894 = 1 2 3)
[minus1205734119868 lowast minus] lt 0
[119883 119868lowast ] ge 0
[1 119868lowast 1] ge 0
[2 119868lowast 2] ge 0
Mathematical Problems in Engineering 15
[3 119868lowast 3] ge 0
[ 119868lowast ] ge 0
119894 gt 0 (119894 = 1 2 3) (68)
5 Simulations
Example 11 Consider inverted pendulum model that canusually be modelled as (1) and the system parameters aregiven as follows
119860 = [minus2 1110 4 ]
119861 = [01minus4]
119862 = [minus03151 01011 03]
119867 = [015 minus056minus01 032 ]
Δ119860 = [004 sin 119905 015 sin 119905minus02 sin 119905 075 sin 119905]
Δ119861 = [002 sin 119905minus01 sin 119905]
119863 = [ 01minus05]
119865 (119905) = sin 119905
(69)
Therefore we have
1198641 = [04 15] 1198642 = 02 (70)
For this simulation the initial state of system is assumed119909(0) = [2 minus1]119879 and the external disturbance is considered as120596(119905) = [015 minus05]119879 3119904 le 119905 le 4119904
0 119900119905ℎ119890119903119904 Here we take the upper
bound of time-varying delay as 120578119872 = 03119904 and its lower boundas 120578119898 = 0119904 namely 0 le 120578(119905) le 03 In addition the faultbounds of the system are given in Table 1
Table 1 The bounds of faults
Symbol Upper bound Lower boundActuatorfaultsΘ 136 009
SensorFaults119866
[[
165 00 175]
][[
0 00 015]
]
minus01
0
01
02
03
04
05
Del
ay
1 2 3 4 5 60Time s
Figure 2 The time-varying delay in double-fault NCS
We choose the parameters as follows
1205821 = 011205822 = 0151205823 = minus0641205824 = 031205825 = 1205826 = 0351205827 = 181198782 = 0311205881 = 30001205882 = 22032ℓ = 1
1198781 = [10013 00 9207]
(71)
By taking advantage of the LMI tool box and inserting theabove parameters into inequalities 10 and (68) we can obtainthe 119867infin guaranteed cost control gain
119870 = 119884119883minus1198791198660minus1 = [85163 151398] (72)
with 120574 = radic120583 = 1952516The corresponding optimal performance indicator (the
upper bound value of guaranteed cost function) is 119869lowast =83162563The time-varying delay is shown in Figure 2 In Figure 3
(a) is the actuator fault which is a piecewise-linear function
16 Mathematical Problems in Engineering
002040608
1121416
Actu
ator
faul
t
1 2 3 4 5 60Time s
(a) Time-varying actuator fault
minus020
02040608
112141618
Sens
or fa
ult
1 2 3 4 5 60Time s
(b) Time-varying sensor fault
Figure 3 The time-varying faults
x1
x2
1 2 3 4 5 60Time s
minus15
minus1
minus05
0
05
1
15
2
Stat
e X
Figure 4 The state response curve of double-fault NCS
1 2 3 4 5 60Time s
minus8minus7minus6minus5minus4minus3minus2minus1
012
Con
trol i
nput
Figure 5 The control input of double-fault NCS
It keeps the minimum value from 13119904 to 17119904 while it keepsthe maximum value from 37119904 to 43119904 The sensor faults areshown as (b) which is sinusoidal It should be noted thatthe green dotted line represents the fault of sensor 1 whilethe blue solid line represents the fault of sensor 2 Throughthe state response of the double-fault NCS shown in Figure 4and corresponding control signal shown in Figure 5 we know
x1
x2
1 2 3 4 5 60Time s
minus8
minus6
minus4
minus2
0
2
4
6
Stat
e X
Figure 6 The state response curve of double-fault NCS
the 119867infin guaranteed cost controller designed in this paper isable to make the double-fault NCS asymptotically stable Thesystem gets preliminarily steady at 2119904 and its state can returnto the equilibrium position in a certain period of time whenthe NCS is affected by external disturbance Compared withthe state response of worse stability shown in Figure 6 whenthe method proposed in [28] is used for this double-faultproblem it sufficiently proves the effectiveness and feasibilityof the method proposed in this paper
To better illustrate the effectiveness of the method pro-posed in this paper the following example is presented
Example 12 Consider the parameters of system (1) as follows
119860 = [[[[[[
021 0 035 10 minus53 minus586 323
365 minus11 minus156 minus0890 0 minus158 minus285
]]]]]]
119861 = [559 12 minus089 13]119879 119862 = [17 02 015 minus018]
Mathematical Problems in Engineering 17
minus15
minus1
minus05
0
05
1
15
Stat
e X1 2 3 4 5 6 7 8 9 100
Time s
R1R2
R3R4
Figure 7 The state response curve of double-fault NCS
Δ119860 = [[[[
082 sin 119905 0 0 00 012 sin 119905 0 00 0 minus058 sin 119905 00 0 0 101 sin 119905]]]]
Δ119861 = [[[[
minus015 sin 119905008 sin 1199050minus028 sin 119905]]]]
119867 = [[[[
minus041 096 052 0006 minus057 0 021121 0 059 0minus032 minus011 minus035 minus003]]]]
119863 = 1198684times4119865 (119905) = diag (sin 119905 sin 119905 sin 119905 sin 119905)
(73)
Therefore we have
1198641 = diag (082 012 minus058 101) 1198642 = [minus015 008 0 minus028]119879 (74)
For this simulation the initial state of system is assumedas 119909(0) = [121 minus051 023 minus018]119879 and the externaldisturbance is considered as
120596 (119905) = [015 cos 119905 015 cos 119905 minus012 sin 119905 minus025 cos 119905]119879 6119904 le 119905 le 81199040 119900119905ℎ119890119903119904 (75)
The uncertain time-varying delay satisfies 0 le 120578(119905) le023119904 In addition the fault bounds of the system are givenin Table 2 Other parameters are selected as follows
1205821 = 121205822 = minus2031205823 = 1681205824 = minus231205825 = minus1051205826 = 6051205827 = 5121198781 = diag (19888 15634 8709 12876) 1198782 = 586
1205881 = 57981205882 = 1879ℓ = 1
(76)
By taking advantage of the LMI tool box and submittingthese parameters above into inequalities 10 and (68) we canobtain the 119867infin guaranteed cost control gain
119870 = 119884119883minus1198791198660minus1= [minus17256 15512 minus08571 07451]
with 120574 = radic120583 = 5819806(77)
The corresponding optimal performance indicator is 119869lowast =65021047 From the state response shown in Figure 7 andcontrol signal shown in Figure 8 we undoubtedly know
18 Mathematical Problems in Engineering
Table 2 The bounds of faults
Symbol Upper bound Lower boundActuatorfaultsΘ 150 012
SensorFaults119866
[[[[[[[[
185 0 0 00 160 0 00 0 125 00 0 0 165
]]]]]]]]
[[[[[[[[
025 0 0 00 0 0 00 0 0 00 0 0 015
]]]]]]]]
minus4
minus3
minus2
minus1
0
1
2
Con
trol i
nput
1 2 3 4 5 6 7 8 9 100Time s
Figure 8 The control input of double-fault NCS
the double-fault NCS is asymptotically stable when the 119867infinguaranteed cost controller is used This further demonstratesthe feasibility and effectiveness of the method proposed inthis paper
6 Conclusions
The issues of modelling and 119867infin guaranteed cost fault-tolerant control of double-fault networked control systemshave been addressedThe closed-loopmodel of a double-faultNCS is set up with regard to the influences of transmissiondelay packet dropout uncertain parameters and externaldisturbance In addition the piecewise delay method is pro-posed to reduce the conservatism when analysing the delay-dependent faulty system With the help of Lee Y Srsquos lemmathe sufficient condition of guaranteed cost fault-tolerantfor time-varying double-fault NCS is introduced using theLyapunov-Krasovskii theory and weighted technology Themethod of designing a guaranteed cost fault-tolerant con-troller for this NCS is given based on LMI Our next researchtask will be choosing more reasonable values of parameters120582119894 (119894 = 1 2 3 4 5 6 7) to reduce the conservatism further Ofcourse the study on scheduling policy of double-fault NCS isalso a challenge but indispensable work
Data Availability
The data used in this paper can be got by simulations
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was partly supported by National Nature Sci-ence Foundation of China under Grants 51875380 51375323and 61563022 Cooperative Innovation Fund-Prospective ofJiangsu Province under Grant BY2016044-01Major Programof Natural Science Foundation of Jiangxi Province Chinaunder Grant 20152ACB20009 High Level Talents of ldquoSix Tal-ent Peaksrdquo in Jiangsu Province China under Grant DZXX-046
References
[1] H Zhang Y Shi J Wang and H Chen ldquoA New Delay-compensation Scheme for Networked Control Systems inController Area Networksrdquo IEEE Transactions on IndustrialElectronics vol 65 no 9 pp 7239ndash7247 2018
[2] A Da Silva and C Kawan ldquoRobustness of critical bit rates forpractical stabilization of networked control systemsrdquo Automat-ica vol 93 pp 397ndash406 2018
[3] Q Zhu K Lu and Y Zhu ldquoGuaranteed cost control ofnetworked control systems under transmission control protocolwith active queue managementrdquo Asian Journal of Control vol18 no 4 pp 1546ndash1557 2016
[4] Q Zhu K Lu and Y Zhu ldquoHinfin Guaranteed Cost Control forNetworked Control Systems under Scheduling Policy Based onPredicted Errorrdquo Mathematical Problems in Engineering vol2014 Article ID 586029 12 pages 2014
[5] W H Chen J X Xu and Z H Guan ldquoGuaranteed cost controlfor uncertain Markovian jump systems with mode-dependenttime-delaysrdquo IEEE Transactions on Automatic Control vol 48no 12 pp 2270ndash2277 2003
[6] HM Soliman A DabroumM S Mahmoud andM SolimanldquoGuaranteed-cost reliable control with regional pole placementof a power systemrdquo Journal of 13e Franklin Institute vol 348no 5 pp 884ndash898 2011
[7] X Li and X-B Wu ldquoGuaranteed cost fault-tolerant controllerdesign of networked control systems under variable-periodsamplingrdquo Information Technology Journal vol 8 no 4 pp 537ndash543 2009
[8] L Zhang and G Orosz ldquoMotif-Based Design for ConnectedVehicle Systems in Presence of Heterogeneous ConnectivityStructures and Time Delaysrdquo IEEE Transactions on IntelligentTransportation Systems vol 17 no 6 pp 1638ndash1651 2016
[9] Z Li G Guo and Z Liu ldquoCommunication parameter designfor networked control systems with the slotted ALOHA accessprotocolrdquo Information Sciences vol 447 pp 205ndash215 2018
[10] K Lu G Jing and L Wang ldquoDistributed algorithm for solv-ing convex inequalitiesrdquo Institute of Electrical and ElectronicsEngineers Transactions on Automatic Control vol 63 no 8 pp2670ndash2677 2018
[11] Q Zhu K Lu and Y Zhu ldquoObserver-based feedback controlof networked control systems with delays and packet dropoutsrdquoJournal of Dynamic SystemsMeasurement andControl vol 138no 2 pp 1ndash8 2016
Mathematical Problems in Engineering 19
[12] Y Li H Li and W Sun ldquoEvent-triggered control for robust setstabilization of logical control networksrdquo Automatica vol 95pp 556ndash560 2018
[13] X Luan P Shi and F Liu ldquoStabilization of networked controlsystems with random delaysrdquo IEEE Transactions on IndustrialElectronics vol 58 no 9 pp 4323ndash4330 2011
[14] Y Zhang and J Jiang ldquoBibliographical review on reconfigurablefault-tolerant control systemsrdquo Annual Reviews in Control vol32 no 2 pp 229ndash252 2008
[15] N H Ei-Farra A Gani and P D Christofides ldquoFault-tolerantcontrol of process systems using communication networksrdquoAIChE Journal vol 51 no 6 pp 1665ndash1682 2005
[16] H R Karimi and H Gao ldquoNew delay-dependent exponentialHinfin synchronization for uncertain neural networks withmixedtime delaysrdquo IEEE Transactions on Systems Man and Cybernet-ics Part B Cybernetics vol 40 no 1 pp 173ndash185 2010
[17] Y N Guo Q Y Zhang D W Gong and J H Zhang ldquoRobustfault-tolerant control of networked control systems with time-varying delaysrdquoControl andDecision vol 23 no 6 pp 689ndash6922008
[18] Z Mao and B Jiang ldquoFault identification and fault-tolerantcontrol for a class of networked control systemsrdquo InternationalJournal of Innovative Computing Information and Control vol3 no 5 pp 1121ndash1130 2007
[19] C-X Yang Z-H Guan and J Huang ldquoStochastic fault tolerantcontrol of networked control systemsrdquo Journal of 13e FranklinInstitute vol 346 no 10 pp 1006ndash1020 2009
[20] Z Mao Y Pan B Jiang and W Chen ldquoFault Detectionfor a Class of Nonlinear Networked Control Systems withCommunication Constraintsrdquo International Journal of ControlAutomation and Systems vol 16 no 1 pp 256ndash264 2018
[21] A Qiu J Gu C Wen and J Zhang ldquoSelf-triggered faultestimation and fault tolerant control for networked controlsystemsrdquo Neurocomputing vol 272 no 1 pp 629ndash637 2018
[22] Q Zhu K Lu G Xie and Y Zhu ldquoGuaranteed Cost Fault-Tolerant Control for Networked Control Systems with SensorFaultsrdquoMathematical Problems in Engineering vol 2015 ArticleID 549347 9 pages 2015
[23] W Wu and Y Zhang ldquoEvent-triggered fault-tolerant controland scheduling codesign for nonlinear networked control sys-tems with medium-access constraint and packet disorderingrdquoInternational Journal of Robust and Nonlinear Control vol 28no 4 pp 1182ndash1198 2018
[24] X Xiao and X-J Li ldquoAdaptive dynamic programming method-based synchronisation control of a class of complex dynamicalnetworks with unknown dynamics and actuator faultsrdquo IETControl 13eory amp Applications vol 12 no 2 pp 291ndash298 2018
[25] PMhaskar AGani CMcFall PDChristofides and J FDavisldquoFault-tolerant control of nonlinear process systems subject tosensor faultsrdquo AIChE Journal vol 53 no 3 pp 654ndash668 2007
[26] M Liu P Shi L Zhang and X Zhao ldquoFault-tolerant controlfor nonlinear Markovian jump systems via proportional andderivative sliding mode observer techniquerdquo IEEE Transactionson Circuits and Systems I Regular Papers vol 58 no 11 pp2755ndash2764 2011
[27] S Li D Sauter C Aubrun and J Yame ldquoStability guaranteedactive fault-tolerant control of networked control systemsrdquoJournal of Control Science and Engineering vol 2008 Article ID189064 9 pages 2008
[28] X Y Luo M J Shang C L Chen and X P Guan ldquoGuaranteedcost active fault-tolerant control of networked control system
with packet dropout and transmission delayrdquo InternationalJournal of Automation and Computing vol 7 no 4 pp 509ndash5152010
[29] Q Zhu B Xie and Y Zhu ldquoGuaranteed Cost Control forMultirate Networked Control Systems with Both Time-Delayand Packet-Dropoutrdquo Mathematical Problems in Engineeringvol 2014 Article ID 637329 9 pages 2014
[30] R Manivannan R Samidurai J Cao and M Perc ldquoDesign ofResilient Reliable Dissipativity Control for Systems with Actu-ator Faults and Probabilistic Time-Delay Signals via Sampled-Data Approachrdquo IEEE Transactions on Systems Man andCybernetics Systems 2018
[31] R Manivannan R Samidurai J Cao A Alsaedi and F EAlsaadi ldquoNon-Fragile Extended Dissipativity Control Designfor Generalized Neural Networks with Interval Time-DelaySignalsrdquo Asian Journal of Control 2019
[32] Q Gao and N Olgac ldquoBounds of imaginary spectra of LTIsystems in the domain of two of the multiple time delaysrdquoAutomatica vol 72 pp 235ndash241 2016
[33] Q Gao A S Kammer U Zalluhoglu and N Olgac ldquoCriticaleffects of the polarity change in delayed states within anLTI dynamics with multiple delaysrdquo Institute of Electrical andElectronics Engineers Transactions onAutomatic Control vol 60no 11 pp 3018ndash3022 2015
[34] Q Gao Z Zhang and C Yang ldquoSign inverting control andits important properties for multiple time-delayed systemsrdquo inProceedings of the 10th ASME Dynamic Systems and ControlConference pp 979ndash984 Virginia USA 2017
[35] Y M Zhang and J Jiang ldquoActive fault-tolerant control systemagainst partial actuator failuresrdquo IEE Proceedings Control13eoryand Applications vol 149 no 1 pp 95ndash104 2002
[36] G Garcia J Bernussou andD Arzelier ldquoRobust stabilization ofdiscrete-time linear systems with norm-bounded time-varyinguncertaintyrdquo Systems amp Control Letters vol 22 no 5 pp 327ndash339 1994
[37] Y Wang L Xie and C E de Souza ldquoRobust control of a classof uncertain nonlinear systemsrdquo Systems amp Control Letters vol19 no 2 pp 139ndash149 1992
[38] D Yue E Tian and Y Zhang ldquoA piecewise analysis methodto stability analysis of linear continuousdiscrete systems withtime-varying delayrdquo International Journal of Robust and Non-linear Control vol 19 no 13 pp 1493ndash1518 2009
[39] X-J Jing D-L Tan and Y-C Wang ldquoAn LMI approach tostability of systems with severe time-delayrdquo IEEE Transactionson Automatic Control vol 49 no 7 pp 1192ndash1195 2004
[40] D Yue Q-L Han and J Lam ldquoNetwork-based robust Hinfincontrol of systems with uncertaintyrdquo Automatica vol 41 no 6pp 999ndash1007 2005
[41] Z Wang F Yang D W C Ho and X Liu ldquoRobust Hinfincontrol for networked systemswith randompacket lossesrdquo IEEETransactions on Systems Man and Cybernetics Part B vol 37no 4 pp 916ndash924 2007
[42] M S Mahmoud ldquoControl of uncertain state-delay systemsguaranteed cost approachrdquo IMA Journal of Mathematical Con-trol and Information vol 18 no 1 pp 109ndash128 2001
[43] D Yue C Peng andG Y Tang ldquoGuaranteed cost control of lin-ear systems over networks with state and input quantisationsrdquoIEE Proceedings Control 13eory and Applications vol 153 no 6pp 658ndash664 2006
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

12 Mathematical Problems in Engineering
119884 and a set of constants 120576 gt 0 and 120583 gt 0 satisfying theLMIs
[[[[[[[[[[[[[[[[[[[[[[[[[[
minus120576119868 0 0 0 120576119863119879lowast minus (1198781 + 119862119879119862)minus1 0 0 Πlowast lowast minus1198782minus1 0 Σlowast lowast lowast minusΓ119897 Ω119897119896lowast lowast lowast lowast Φ119897lowast lowast lowast lowast lowastlowast lowast lowast lowast lowastlowast lowast lowast lowast lowastlowast lowast lowast lowast lowastlowast lowast lowast lowast lowast
0 0 0 0 00 0 0 0 00 Θ0119884 0 Θ0 00 0 0 0 0
119864119879 Θ 119883 Δ 119884119879minus120576119868 1198642Θ0119884 0 1198642Θ0 0lowast minus1205881119883119879 0 0 119884119879lowast lowast minus1205881minus1119883 0 0lowast lowast lowast minus1205882119868 0lowast lowast lowast lowast minus1205882minus1119868
]]]]]]]]]]]]]]]]]]]]]]
lt 0
119897 = 1 2 119896 = 1 2(62)
where
Φ1 =
[[[[[[[[[[[[[[[[[[[[[
minus1 + 1205821119860119883119879 + 1205821119883119860119879 1 + 1205822119883119860119879 + 11 1205823119883119860119879 minus 11 1205824119883119860119879lowast minus1 + 12 + 12119879 13119879 minus 12 14119879lowast lowast minus3120572 minus 12 minus 12119879 3120572 minus 14119879lowast lowast lowast minus3120572lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
minus 1205821119883119879 + 119883119860119879 Ψ1 + 1205825119883119860119879 1205826119883119860119879 + 1205827119883119860119879 + 1205821119867119883119879 0minus1205822119883119879 + 15119879 Ψ2 + 16119879 1205822119867119883119879 + 17119879 + 18119879 0minus1205823119883119879 minus 15119879 Ψ3 minus 16119879 1205823119867119883119879 minus 17119879 minus 18119879 0
minus1205824119883119879 Ψ4 1205824119867119883119879 012057811989821 + 120572 (2 + 3) minus 119883119879 minus 119883 Ψ5 minus 1205825119883 119867119883119879 minus 1205826119883 minus 1205827119883 0
lowast Ψ6 Ξ 0lowast lowast 1205826119867119883119879 + 1205827119867119883119879 + 1205826119883119867119879 + 1205827119883119867119879 0lowast lowast lowast minus120583119868
]]]]]]]]]]]]]]]]]
Φ2 =
[[[[[[[[[[[[[[[[[[[[[
minus1 + 1205821119860119883119879 + 1205821119883119860119879 1 + 1205822119883119860119879 1205823119883119860119879 + 21 1205824119883119860119879 minus 21lowast minus1 minus 2120572 2120572 + 22 minus22lowast lowast minus2120572 + 23 + 23119879 24119879 minus 23lowast lowast lowast minus24 minus 24119879lowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowastlowast lowast lowast lowast
997888rarr
Mathematical Problems in Engineering 13
minus 1205821119883119879 + 119883119860119879 Ψ11015840 + 1205825119883119860119879 1205826119883119860119879 + 1205827119883119860119879 + 1205821119867119883119879 0minus1205822119883119879 Ψ21015840 1205822119867119883119879 0
minus1205823119883119879 + 25119879 Ψ31015840 + 26119879 1205823119867119883119879 + 27119879 + 28119879 0minus1205824119883119879 minus 25119879 Ψ41015840 minus 26119879 1205824119867119883119879 minus 27119879 minus 28119879 0
12057811989821 + 120572 (2 + 3) minus 119883 minus 119883119879 Ψ51015840 minus 1205825119883 119867119883119879 minus 1205826119883 minus 1205827119883 0lowast Ψ61015840 Ξ1015840 0lowast lowast 1205826119867119883119879 + 1205827119867119883119879 + 1205826119883119867119879 + 1205827119883119867119879 0lowast lowast lowast minus120583119868
]]]]]]]]]]]]]]]]]]]]]
Γ1 = 1205721198772Γ1 = 1205722Γ2 = 1205723
Ω11 = 1205721119879Ω12 = 1205721119879Ω21 = 1205722119879Ω22 = 1205722119879
1119879 = [11119879 12119879 13119879 14119879 15119879 16119879 17119879 18119879] 2119879 = [21119879 22119879 23119879 24119879 25119879 26119879 27119879 28119879]
1119879 = [11119879 12119879 13119879 14119879 15119879 16119879 17119879 18119879] 1198732119879 = [21119879 22119879 23119879 24119879 25119879 26119879 27119879 28119879]
Ξ = 1205826 (119861Θ0119884)119879 + 1205827 (119861Θ0119884)119879 + 1205825119867119883119879 minus 17119879 minus 18119879 + 17119879 + 18119879Ψ119894 = 120582119894119861Θ0119884 + 1119894 minus 1119894 (119894 = 1 2 3 4)
Ψ5 = 119861Θ0119884 + 1119894 minus 1119894Ψ6 = 1205825119861Θ0119884 + 1205825 (119861Θ0119884)119879 minus 11987216 minus 11987216119879 + 11987316 + 11987316119879
Ξ1015840 = 1205826 (119861Θ0119884)119879 + 1205827 (119861Θ0119884)119879 + 1205825119867119883119879 minus 27119879 minus 28119879 + 27119879 + 28119879Ψ1198941015840 = 120582119894119861Θ0119884 + 2119894 minus 2119894 (119894 = 1 2 3 4)
Ψ51015840 = 119861Θ0119884 + 2119894 minus 2119894Ψ61015840 = 1205825119861Θ0119884 + 1205825 (119861Θ0119884)119879 minus 26 minus 26119879 + 26 + 26119879
119863 = [1205821119863119879 1205822119863119879 1205823119863119879 1205824119863119879 119863119879 1205825119863119879 1205826119863119879 + 1205827119863119879 0]119879 119864 = [1198641119883119879 0 0 0 0 1198642Θ0119884 0 0]
119883 = [0 0 0 0 0 119883119879 0 0]119879 Π = [119883119879 0 0 0 0 0 0 0]
14 Mathematical Problems in Engineering
Θ = [(1205821119861Θ0119884)119879 (1205822119861Θ0119884)119879 (1205823119861Θ0119884)119879 (1205824119861Θ0119884)119879 (119861Θ0119884)119879 (1205825119861Θ0119884)119879 (1205826119861119884)119879 + (1205827119861119884)119879 0]119879 Δ = [(1205821119861Θ0)119879 (1205822119861Θ0)119879 (1205823119861Θ0)119879 (1205824119861Θ0)119879 (119861Θ0)119879 (1205825119861Θ0)119879 (1205826119861Θ0)119879 + (1205827119861Θ0)119879 0]119879
119884 = [0 0 0 0 0 119884 0 0] Σ = [0 0 0 0 0 Θ0119884 0 0]
(63)
then the 119867infin guaranteed cost control gain 119870 = 119884119883minus1198791198660minus1 canrendermodel (21) to be asymptotically stable with the119867infin normbound 120574 = radic120583 13e upper bound 1198690 of cost function 119869 is givenas
1198690 = 119909119879 (0) 119883minus1119883minus119879119909 (0)+ 120578119898 int0
minus120578119898
int0119904
1199091015840119879 (120591) 119883minus11119883minus1198791199091015840 (120591) 119889119904119889120591+ intminus120578119898minus1205781
int0119904
1199091015840119879 (120591) 119883minus12119883minus1198791199091015840 (120591) 119889119904119889120591+ intminus1205781minus120578119872
int0119904
1199091015840119879 (120591) 119883minus13119883minus1198791199091015840 (120591) 119889119904119889120591
(64)
Proof The proof is based on a suitable transformation anda change of variables allowing us to obtain inequality (24)in Theorem 8 First we define 1198805 = 1198800 119880119894 = 1205821198941198800 (119894 =from 1 to 4) 1198806 = 12058251198800 in (24) Because we consider thedimension of state119909is equal to that of outside disturbance120596 in this paper we can also define 1198807 = 12058261198800 1198808 =12058271198800 Obviously (24) implies 1198805 gt 0 so 1198800 is nonsingularThen using the analysis method of D Yue [40] and Z Wang[41] pre- and postmultiplying both sides of inequality (24)with diag(119868 119868 119868 119883 119868 119883 119868 119868 119868) and its transpose where = diag(119883 119883 119883 119883 119883 119883 119883 119883) and 119883 = 1198800minus1 introducingnew variables 119883119875119883119879 = 119883119877119895119883119879 = 119895 (119895 = 1 2 3)119883119872119897120573119883119879 = 119897120573 119883119873119897120573119883119879 = 119897120573 (119897 = 1 2 120573 = 1 2 sdot sdot sdot 8)1198701198660119883119879 = 119884 and 120583 = 1205742 From the definition of 1198660 we know1198660 is invertible so 119870 can be obtained by calculating 119870 =119884119883minus1198791198660minus1 It is easy to see that 10 and (64) respectively imply(24) and (26) Therefore from Theorem 8 we can completethe proof
To obtain the optimal bound 119869lowast shown in (26) thecommonly used method is to consider it as an optimizationproblem like [42] in which the expression of initial state 119909(119905)(119905 isin [minus120578119872 0]) needs to be known The expression of initialstate is not given in this paper Therefore the optimizationmethod used in [42] cannot be used here A practical methodto obtain 119869lowast also used by D Yue [43] is employed as follows
Suppose 1199091015840(119905) is bounded if 119905 isin [minus120578119872 0] and satisfying1199091015840119879(120591)1199091015840(120591) le ℓ In addition suppose that there exists 120573119894 gt0 (119894 = 1 2 3) satisfying119883minus1119894119883minus119879 le 120573119894119868 119894 = 1 2 3119883minus1119883minus119879 le 1205734119868 (65)
Inserting this into (64) we have
1198690 le 1205734119909119879 (0) 119909 (0) + 05ℓ12057311205781198983 + 05ℓ1205732 (12057812 minus 1205781198982)+ 05ℓ1205733 (1205781198722 minus 12057812) = 119869lowast (66)
Applying the Schur complement to the inequalities above wehave
[minus120573119894119868 119883minus1lowast minus119877119894minus1] lt 0 119894 = 1 2 3
[minus1205734119868 119883minus1lowast minus119875minus1] lt 0
(67)
Then combining 10 and (67) 119894minus1 119894 (119894 = 1 2 3)minus1 119883minus1 119883 exist simultaneously We cannot directly usethe LMI tools to solve the problem Defining 119894minus1 = 119894(119894 = 1 2 3) minus1 = 119883minus1 = and using the idea of thecone complementary linearization algorithm the guaranteedcost fault-tolerant controller of system (21) and the value ofoptimal performance indicator 119869lowast can be obtained in thefollowing method
Minimize 119905119903119886119888119890 (11 + 22 + 33 + + )+ 1205734 + 0512057311205781198983 + 051205732 (12057812 minus 1205781198982)+ 051205733 (1205781198722 minus 12057812)
Subject to 119868119899119890119902119906119886119897119894119905119894119890119904 (62) [minus120573119894119868
lowast minus119894] lt 0 (119894 = 1 2 3)
[minus1205734119868 lowast minus] lt 0
[119883 119868lowast ] ge 0
[1 119868lowast 1] ge 0
[2 119868lowast 2] ge 0
Mathematical Problems in Engineering 15
[3 119868lowast 3] ge 0
[ 119868lowast ] ge 0
119894 gt 0 (119894 = 1 2 3) (68)
5 Simulations
Example 11 Consider inverted pendulum model that canusually be modelled as (1) and the system parameters aregiven as follows
119860 = [minus2 1110 4 ]
119861 = [01minus4]
119862 = [minus03151 01011 03]
119867 = [015 minus056minus01 032 ]
Δ119860 = [004 sin 119905 015 sin 119905minus02 sin 119905 075 sin 119905]
Δ119861 = [002 sin 119905minus01 sin 119905]
119863 = [ 01minus05]
119865 (119905) = sin 119905
(69)
Therefore we have
1198641 = [04 15] 1198642 = 02 (70)
For this simulation the initial state of system is assumed119909(0) = [2 minus1]119879 and the external disturbance is considered as120596(119905) = [015 minus05]119879 3119904 le 119905 le 4119904
0 119900119905ℎ119890119903119904 Here we take the upper
bound of time-varying delay as 120578119872 = 03119904 and its lower boundas 120578119898 = 0119904 namely 0 le 120578(119905) le 03 In addition the faultbounds of the system are given in Table 1
Table 1 The bounds of faults
Symbol Upper bound Lower boundActuatorfaultsΘ 136 009
SensorFaults119866
[[
165 00 175]
][[
0 00 015]
]
minus01
0
01
02
03
04
05
Del
ay
1 2 3 4 5 60Time s
Figure 2 The time-varying delay in double-fault NCS
We choose the parameters as follows
1205821 = 011205822 = 0151205823 = minus0641205824 = 031205825 = 1205826 = 0351205827 = 181198782 = 0311205881 = 30001205882 = 22032ℓ = 1
1198781 = [10013 00 9207]
(71)
By taking advantage of the LMI tool box and inserting theabove parameters into inequalities 10 and (68) we can obtainthe 119867infin guaranteed cost control gain
119870 = 119884119883minus1198791198660minus1 = [85163 151398] (72)
with 120574 = radic120583 = 1952516The corresponding optimal performance indicator (the
upper bound value of guaranteed cost function) is 119869lowast =83162563The time-varying delay is shown in Figure 2 In Figure 3
(a) is the actuator fault which is a piecewise-linear function
16 Mathematical Problems in Engineering
002040608
1121416
Actu
ator
faul
t
1 2 3 4 5 60Time s
(a) Time-varying actuator fault
minus020
02040608
112141618
Sens
or fa
ult
1 2 3 4 5 60Time s
(b) Time-varying sensor fault
Figure 3 The time-varying faults
x1
x2
1 2 3 4 5 60Time s
minus15
minus1
minus05
0
05
1
15
2
Stat
e X
Figure 4 The state response curve of double-fault NCS
1 2 3 4 5 60Time s
minus8minus7minus6minus5minus4minus3minus2minus1
012
Con
trol i
nput
Figure 5 The control input of double-fault NCS
It keeps the minimum value from 13119904 to 17119904 while it keepsthe maximum value from 37119904 to 43119904 The sensor faults areshown as (b) which is sinusoidal It should be noted thatthe green dotted line represents the fault of sensor 1 whilethe blue solid line represents the fault of sensor 2 Throughthe state response of the double-fault NCS shown in Figure 4and corresponding control signal shown in Figure 5 we know
x1
x2
1 2 3 4 5 60Time s
minus8
minus6
minus4
minus2
0
2
4
6
Stat
e X
Figure 6 The state response curve of double-fault NCS
the 119867infin guaranteed cost controller designed in this paper isable to make the double-fault NCS asymptotically stable Thesystem gets preliminarily steady at 2119904 and its state can returnto the equilibrium position in a certain period of time whenthe NCS is affected by external disturbance Compared withthe state response of worse stability shown in Figure 6 whenthe method proposed in [28] is used for this double-faultproblem it sufficiently proves the effectiveness and feasibilityof the method proposed in this paper
To better illustrate the effectiveness of the method pro-posed in this paper the following example is presented
Example 12 Consider the parameters of system (1) as follows
119860 = [[[[[[
021 0 035 10 minus53 minus586 323
365 minus11 minus156 minus0890 0 minus158 minus285
]]]]]]
119861 = [559 12 minus089 13]119879 119862 = [17 02 015 minus018]
Mathematical Problems in Engineering 17
minus15
minus1
minus05
0
05
1
15
Stat
e X1 2 3 4 5 6 7 8 9 100
Time s
R1R2
R3R4
Figure 7 The state response curve of double-fault NCS
Δ119860 = [[[[
082 sin 119905 0 0 00 012 sin 119905 0 00 0 minus058 sin 119905 00 0 0 101 sin 119905]]]]
Δ119861 = [[[[
minus015 sin 119905008 sin 1199050minus028 sin 119905]]]]
119867 = [[[[
minus041 096 052 0006 minus057 0 021121 0 059 0minus032 minus011 minus035 minus003]]]]
119863 = 1198684times4119865 (119905) = diag (sin 119905 sin 119905 sin 119905 sin 119905)
(73)
Therefore we have
1198641 = diag (082 012 minus058 101) 1198642 = [minus015 008 0 minus028]119879 (74)
For this simulation the initial state of system is assumedas 119909(0) = [121 minus051 023 minus018]119879 and the externaldisturbance is considered as
120596 (119905) = [015 cos 119905 015 cos 119905 minus012 sin 119905 minus025 cos 119905]119879 6119904 le 119905 le 81199040 119900119905ℎ119890119903119904 (75)
The uncertain time-varying delay satisfies 0 le 120578(119905) le023119904 In addition the fault bounds of the system are givenin Table 2 Other parameters are selected as follows
1205821 = 121205822 = minus2031205823 = 1681205824 = minus231205825 = minus1051205826 = 6051205827 = 5121198781 = diag (19888 15634 8709 12876) 1198782 = 586
1205881 = 57981205882 = 1879ℓ = 1
(76)
By taking advantage of the LMI tool box and submittingthese parameters above into inequalities 10 and (68) we canobtain the 119867infin guaranteed cost control gain
119870 = 119884119883minus1198791198660minus1= [minus17256 15512 minus08571 07451]
with 120574 = radic120583 = 5819806(77)
The corresponding optimal performance indicator is 119869lowast =65021047 From the state response shown in Figure 7 andcontrol signal shown in Figure 8 we undoubtedly know
18 Mathematical Problems in Engineering
Table 2 The bounds of faults
Symbol Upper bound Lower boundActuatorfaultsΘ 150 012
SensorFaults119866
[[[[[[[[
185 0 0 00 160 0 00 0 125 00 0 0 165
]]]]]]]]
[[[[[[[[
025 0 0 00 0 0 00 0 0 00 0 0 015
]]]]]]]]
minus4
minus3
minus2
minus1
0
1
2
Con
trol i
nput
1 2 3 4 5 6 7 8 9 100Time s
Figure 8 The control input of double-fault NCS
the double-fault NCS is asymptotically stable when the 119867infinguaranteed cost controller is used This further demonstratesthe feasibility and effectiveness of the method proposed inthis paper
6 Conclusions
The issues of modelling and 119867infin guaranteed cost fault-tolerant control of double-fault networked control systemshave been addressedThe closed-loopmodel of a double-faultNCS is set up with regard to the influences of transmissiondelay packet dropout uncertain parameters and externaldisturbance In addition the piecewise delay method is pro-posed to reduce the conservatism when analysing the delay-dependent faulty system With the help of Lee Y Srsquos lemmathe sufficient condition of guaranteed cost fault-tolerantfor time-varying double-fault NCS is introduced using theLyapunov-Krasovskii theory and weighted technology Themethod of designing a guaranteed cost fault-tolerant con-troller for this NCS is given based on LMI Our next researchtask will be choosing more reasonable values of parameters120582119894 (119894 = 1 2 3 4 5 6 7) to reduce the conservatism further Ofcourse the study on scheduling policy of double-fault NCS isalso a challenge but indispensable work
Data Availability
The data used in this paper can be got by simulations
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was partly supported by National Nature Sci-ence Foundation of China under Grants 51875380 51375323and 61563022 Cooperative Innovation Fund-Prospective ofJiangsu Province under Grant BY2016044-01Major Programof Natural Science Foundation of Jiangxi Province Chinaunder Grant 20152ACB20009 High Level Talents of ldquoSix Tal-ent Peaksrdquo in Jiangsu Province China under Grant DZXX-046
References
[1] H Zhang Y Shi J Wang and H Chen ldquoA New Delay-compensation Scheme for Networked Control Systems inController Area Networksrdquo IEEE Transactions on IndustrialElectronics vol 65 no 9 pp 7239ndash7247 2018
[2] A Da Silva and C Kawan ldquoRobustness of critical bit rates forpractical stabilization of networked control systemsrdquo Automat-ica vol 93 pp 397ndash406 2018
[3] Q Zhu K Lu and Y Zhu ldquoGuaranteed cost control ofnetworked control systems under transmission control protocolwith active queue managementrdquo Asian Journal of Control vol18 no 4 pp 1546ndash1557 2016
[4] Q Zhu K Lu and Y Zhu ldquoHinfin Guaranteed Cost Control forNetworked Control Systems under Scheduling Policy Based onPredicted Errorrdquo Mathematical Problems in Engineering vol2014 Article ID 586029 12 pages 2014
[5] W H Chen J X Xu and Z H Guan ldquoGuaranteed cost controlfor uncertain Markovian jump systems with mode-dependenttime-delaysrdquo IEEE Transactions on Automatic Control vol 48no 12 pp 2270ndash2277 2003
[6] HM Soliman A DabroumM S Mahmoud andM SolimanldquoGuaranteed-cost reliable control with regional pole placementof a power systemrdquo Journal of 13e Franklin Institute vol 348no 5 pp 884ndash898 2011
[7] X Li and X-B Wu ldquoGuaranteed cost fault-tolerant controllerdesign of networked control systems under variable-periodsamplingrdquo Information Technology Journal vol 8 no 4 pp 537ndash543 2009
[8] L Zhang and G Orosz ldquoMotif-Based Design for ConnectedVehicle Systems in Presence of Heterogeneous ConnectivityStructures and Time Delaysrdquo IEEE Transactions on IntelligentTransportation Systems vol 17 no 6 pp 1638ndash1651 2016
[9] Z Li G Guo and Z Liu ldquoCommunication parameter designfor networked control systems with the slotted ALOHA accessprotocolrdquo Information Sciences vol 447 pp 205ndash215 2018
[10] K Lu G Jing and L Wang ldquoDistributed algorithm for solv-ing convex inequalitiesrdquo Institute of Electrical and ElectronicsEngineers Transactions on Automatic Control vol 63 no 8 pp2670ndash2677 2018
[11] Q Zhu K Lu and Y Zhu ldquoObserver-based feedback controlof networked control systems with delays and packet dropoutsrdquoJournal of Dynamic SystemsMeasurement andControl vol 138no 2 pp 1ndash8 2016
Mathematical Problems in Engineering 19
[12] Y Li H Li and W Sun ldquoEvent-triggered control for robust setstabilization of logical control networksrdquo Automatica vol 95pp 556ndash560 2018
[13] X Luan P Shi and F Liu ldquoStabilization of networked controlsystems with random delaysrdquo IEEE Transactions on IndustrialElectronics vol 58 no 9 pp 4323ndash4330 2011
[14] Y Zhang and J Jiang ldquoBibliographical review on reconfigurablefault-tolerant control systemsrdquo Annual Reviews in Control vol32 no 2 pp 229ndash252 2008
[15] N H Ei-Farra A Gani and P D Christofides ldquoFault-tolerantcontrol of process systems using communication networksrdquoAIChE Journal vol 51 no 6 pp 1665ndash1682 2005
[16] H R Karimi and H Gao ldquoNew delay-dependent exponentialHinfin synchronization for uncertain neural networks withmixedtime delaysrdquo IEEE Transactions on Systems Man and Cybernet-ics Part B Cybernetics vol 40 no 1 pp 173ndash185 2010
[17] Y N Guo Q Y Zhang D W Gong and J H Zhang ldquoRobustfault-tolerant control of networked control systems with time-varying delaysrdquoControl andDecision vol 23 no 6 pp 689ndash6922008
[18] Z Mao and B Jiang ldquoFault identification and fault-tolerantcontrol for a class of networked control systemsrdquo InternationalJournal of Innovative Computing Information and Control vol3 no 5 pp 1121ndash1130 2007
[19] C-X Yang Z-H Guan and J Huang ldquoStochastic fault tolerantcontrol of networked control systemsrdquo Journal of 13e FranklinInstitute vol 346 no 10 pp 1006ndash1020 2009
[20] Z Mao Y Pan B Jiang and W Chen ldquoFault Detectionfor a Class of Nonlinear Networked Control Systems withCommunication Constraintsrdquo International Journal of ControlAutomation and Systems vol 16 no 1 pp 256ndash264 2018
[21] A Qiu J Gu C Wen and J Zhang ldquoSelf-triggered faultestimation and fault tolerant control for networked controlsystemsrdquo Neurocomputing vol 272 no 1 pp 629ndash637 2018
[22] Q Zhu K Lu G Xie and Y Zhu ldquoGuaranteed Cost Fault-Tolerant Control for Networked Control Systems with SensorFaultsrdquoMathematical Problems in Engineering vol 2015 ArticleID 549347 9 pages 2015
[23] W Wu and Y Zhang ldquoEvent-triggered fault-tolerant controland scheduling codesign for nonlinear networked control sys-tems with medium-access constraint and packet disorderingrdquoInternational Journal of Robust and Nonlinear Control vol 28no 4 pp 1182ndash1198 2018
[24] X Xiao and X-J Li ldquoAdaptive dynamic programming method-based synchronisation control of a class of complex dynamicalnetworks with unknown dynamics and actuator faultsrdquo IETControl 13eory amp Applications vol 12 no 2 pp 291ndash298 2018
[25] PMhaskar AGani CMcFall PDChristofides and J FDavisldquoFault-tolerant control of nonlinear process systems subject tosensor faultsrdquo AIChE Journal vol 53 no 3 pp 654ndash668 2007
[26] M Liu P Shi L Zhang and X Zhao ldquoFault-tolerant controlfor nonlinear Markovian jump systems via proportional andderivative sliding mode observer techniquerdquo IEEE Transactionson Circuits and Systems I Regular Papers vol 58 no 11 pp2755ndash2764 2011
[27] S Li D Sauter C Aubrun and J Yame ldquoStability guaranteedactive fault-tolerant control of networked control systemsrdquoJournal of Control Science and Engineering vol 2008 Article ID189064 9 pages 2008
[28] X Y Luo M J Shang C L Chen and X P Guan ldquoGuaranteedcost active fault-tolerant control of networked control system
with packet dropout and transmission delayrdquo InternationalJournal of Automation and Computing vol 7 no 4 pp 509ndash5152010
[29] Q Zhu B Xie and Y Zhu ldquoGuaranteed Cost Control forMultirate Networked Control Systems with Both Time-Delayand Packet-Dropoutrdquo Mathematical Problems in Engineeringvol 2014 Article ID 637329 9 pages 2014
[30] R Manivannan R Samidurai J Cao and M Perc ldquoDesign ofResilient Reliable Dissipativity Control for Systems with Actu-ator Faults and Probabilistic Time-Delay Signals via Sampled-Data Approachrdquo IEEE Transactions on Systems Man andCybernetics Systems 2018
[31] R Manivannan R Samidurai J Cao A Alsaedi and F EAlsaadi ldquoNon-Fragile Extended Dissipativity Control Designfor Generalized Neural Networks with Interval Time-DelaySignalsrdquo Asian Journal of Control 2019
[32] Q Gao and N Olgac ldquoBounds of imaginary spectra of LTIsystems in the domain of two of the multiple time delaysrdquoAutomatica vol 72 pp 235ndash241 2016
[33] Q Gao A S Kammer U Zalluhoglu and N Olgac ldquoCriticaleffects of the polarity change in delayed states within anLTI dynamics with multiple delaysrdquo Institute of Electrical andElectronics Engineers Transactions onAutomatic Control vol 60no 11 pp 3018ndash3022 2015
[34] Q Gao Z Zhang and C Yang ldquoSign inverting control andits important properties for multiple time-delayed systemsrdquo inProceedings of the 10th ASME Dynamic Systems and ControlConference pp 979ndash984 Virginia USA 2017
[35] Y M Zhang and J Jiang ldquoActive fault-tolerant control systemagainst partial actuator failuresrdquo IEE Proceedings Control13eoryand Applications vol 149 no 1 pp 95ndash104 2002
[36] G Garcia J Bernussou andD Arzelier ldquoRobust stabilization ofdiscrete-time linear systems with norm-bounded time-varyinguncertaintyrdquo Systems amp Control Letters vol 22 no 5 pp 327ndash339 1994
[37] Y Wang L Xie and C E de Souza ldquoRobust control of a classof uncertain nonlinear systemsrdquo Systems amp Control Letters vol19 no 2 pp 139ndash149 1992
[38] D Yue E Tian and Y Zhang ldquoA piecewise analysis methodto stability analysis of linear continuousdiscrete systems withtime-varying delayrdquo International Journal of Robust and Non-linear Control vol 19 no 13 pp 1493ndash1518 2009
[39] X-J Jing D-L Tan and Y-C Wang ldquoAn LMI approach tostability of systems with severe time-delayrdquo IEEE Transactionson Automatic Control vol 49 no 7 pp 1192ndash1195 2004
[40] D Yue Q-L Han and J Lam ldquoNetwork-based robust Hinfincontrol of systems with uncertaintyrdquo Automatica vol 41 no 6pp 999ndash1007 2005
[41] Z Wang F Yang D W C Ho and X Liu ldquoRobust Hinfincontrol for networked systemswith randompacket lossesrdquo IEEETransactions on Systems Man and Cybernetics Part B vol 37no 4 pp 916ndash924 2007
[42] M S Mahmoud ldquoControl of uncertain state-delay systemsguaranteed cost approachrdquo IMA Journal of Mathematical Con-trol and Information vol 18 no 1 pp 109ndash128 2001
[43] D Yue C Peng andG Y Tang ldquoGuaranteed cost control of lin-ear systems over networks with state and input quantisationsrdquoIEE Proceedings Control 13eory and Applications vol 153 no 6pp 658ndash664 2006
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Mathematical Problems in Engineering 13
minus 1205821119883119879 + 119883119860119879 Ψ11015840 + 1205825119883119860119879 1205826119883119860119879 + 1205827119883119860119879 + 1205821119867119883119879 0minus1205822119883119879 Ψ21015840 1205822119867119883119879 0
minus1205823119883119879 + 25119879 Ψ31015840 + 26119879 1205823119867119883119879 + 27119879 + 28119879 0minus1205824119883119879 minus 25119879 Ψ41015840 minus 26119879 1205824119867119883119879 minus 27119879 minus 28119879 0
12057811989821 + 120572 (2 + 3) minus 119883 minus 119883119879 Ψ51015840 minus 1205825119883 119867119883119879 minus 1205826119883 minus 1205827119883 0lowast Ψ61015840 Ξ1015840 0lowast lowast 1205826119867119883119879 + 1205827119867119883119879 + 1205826119883119867119879 + 1205827119883119867119879 0lowast lowast lowast minus120583119868
]]]]]]]]]]]]]]]]]]]]]
Γ1 = 1205721198772Γ1 = 1205722Γ2 = 1205723
Ω11 = 1205721119879Ω12 = 1205721119879Ω21 = 1205722119879Ω22 = 1205722119879
1119879 = [11119879 12119879 13119879 14119879 15119879 16119879 17119879 18119879] 2119879 = [21119879 22119879 23119879 24119879 25119879 26119879 27119879 28119879]
1119879 = [11119879 12119879 13119879 14119879 15119879 16119879 17119879 18119879] 1198732119879 = [21119879 22119879 23119879 24119879 25119879 26119879 27119879 28119879]
Ξ = 1205826 (119861Θ0119884)119879 + 1205827 (119861Θ0119884)119879 + 1205825119867119883119879 minus 17119879 minus 18119879 + 17119879 + 18119879Ψ119894 = 120582119894119861Θ0119884 + 1119894 minus 1119894 (119894 = 1 2 3 4)
Ψ5 = 119861Θ0119884 + 1119894 minus 1119894Ψ6 = 1205825119861Θ0119884 + 1205825 (119861Θ0119884)119879 minus 11987216 minus 11987216119879 + 11987316 + 11987316119879
Ξ1015840 = 1205826 (119861Θ0119884)119879 + 1205827 (119861Θ0119884)119879 + 1205825119867119883119879 minus 27119879 minus 28119879 + 27119879 + 28119879Ψ1198941015840 = 120582119894119861Θ0119884 + 2119894 minus 2119894 (119894 = 1 2 3 4)
Ψ51015840 = 119861Θ0119884 + 2119894 minus 2119894Ψ61015840 = 1205825119861Θ0119884 + 1205825 (119861Θ0119884)119879 minus 26 minus 26119879 + 26 + 26119879
119863 = [1205821119863119879 1205822119863119879 1205823119863119879 1205824119863119879 119863119879 1205825119863119879 1205826119863119879 + 1205827119863119879 0]119879 119864 = [1198641119883119879 0 0 0 0 1198642Θ0119884 0 0]
119883 = [0 0 0 0 0 119883119879 0 0]119879 Π = [119883119879 0 0 0 0 0 0 0]
14 Mathematical Problems in Engineering
Θ = [(1205821119861Θ0119884)119879 (1205822119861Θ0119884)119879 (1205823119861Θ0119884)119879 (1205824119861Θ0119884)119879 (119861Θ0119884)119879 (1205825119861Θ0119884)119879 (1205826119861119884)119879 + (1205827119861119884)119879 0]119879 Δ = [(1205821119861Θ0)119879 (1205822119861Θ0)119879 (1205823119861Θ0)119879 (1205824119861Θ0)119879 (119861Θ0)119879 (1205825119861Θ0)119879 (1205826119861Θ0)119879 + (1205827119861Θ0)119879 0]119879
119884 = [0 0 0 0 0 119884 0 0] Σ = [0 0 0 0 0 Θ0119884 0 0]
(63)
then the 119867infin guaranteed cost control gain 119870 = 119884119883minus1198791198660minus1 canrendermodel (21) to be asymptotically stable with the119867infin normbound 120574 = radic120583 13e upper bound 1198690 of cost function 119869 is givenas
1198690 = 119909119879 (0) 119883minus1119883minus119879119909 (0)+ 120578119898 int0
minus120578119898
int0119904
1199091015840119879 (120591) 119883minus11119883minus1198791199091015840 (120591) 119889119904119889120591+ intminus120578119898minus1205781
int0119904
1199091015840119879 (120591) 119883minus12119883minus1198791199091015840 (120591) 119889119904119889120591+ intminus1205781minus120578119872
int0119904
1199091015840119879 (120591) 119883minus13119883minus1198791199091015840 (120591) 119889119904119889120591
(64)
Proof The proof is based on a suitable transformation anda change of variables allowing us to obtain inequality (24)in Theorem 8 First we define 1198805 = 1198800 119880119894 = 1205821198941198800 (119894 =from 1 to 4) 1198806 = 12058251198800 in (24) Because we consider thedimension of state119909is equal to that of outside disturbance120596 in this paper we can also define 1198807 = 12058261198800 1198808 =12058271198800 Obviously (24) implies 1198805 gt 0 so 1198800 is nonsingularThen using the analysis method of D Yue [40] and Z Wang[41] pre- and postmultiplying both sides of inequality (24)with diag(119868 119868 119868 119883 119868 119883 119868 119868 119868) and its transpose where = diag(119883 119883 119883 119883 119883 119883 119883 119883) and 119883 = 1198800minus1 introducingnew variables 119883119875119883119879 = 119883119877119895119883119879 = 119895 (119895 = 1 2 3)119883119872119897120573119883119879 = 119897120573 119883119873119897120573119883119879 = 119897120573 (119897 = 1 2 120573 = 1 2 sdot sdot sdot 8)1198701198660119883119879 = 119884 and 120583 = 1205742 From the definition of 1198660 we know1198660 is invertible so 119870 can be obtained by calculating 119870 =119884119883minus1198791198660minus1 It is easy to see that 10 and (64) respectively imply(24) and (26) Therefore from Theorem 8 we can completethe proof
To obtain the optimal bound 119869lowast shown in (26) thecommonly used method is to consider it as an optimizationproblem like [42] in which the expression of initial state 119909(119905)(119905 isin [minus120578119872 0]) needs to be known The expression of initialstate is not given in this paper Therefore the optimizationmethod used in [42] cannot be used here A practical methodto obtain 119869lowast also used by D Yue [43] is employed as follows
Suppose 1199091015840(119905) is bounded if 119905 isin [minus120578119872 0] and satisfying1199091015840119879(120591)1199091015840(120591) le ℓ In addition suppose that there exists 120573119894 gt0 (119894 = 1 2 3) satisfying119883minus1119894119883minus119879 le 120573119894119868 119894 = 1 2 3119883minus1119883minus119879 le 1205734119868 (65)
Inserting this into (64) we have
1198690 le 1205734119909119879 (0) 119909 (0) + 05ℓ12057311205781198983 + 05ℓ1205732 (12057812 minus 1205781198982)+ 05ℓ1205733 (1205781198722 minus 12057812) = 119869lowast (66)
Applying the Schur complement to the inequalities above wehave
[minus120573119894119868 119883minus1lowast minus119877119894minus1] lt 0 119894 = 1 2 3
[minus1205734119868 119883minus1lowast minus119875minus1] lt 0
(67)
Then combining 10 and (67) 119894minus1 119894 (119894 = 1 2 3)minus1 119883minus1 119883 exist simultaneously We cannot directly usethe LMI tools to solve the problem Defining 119894minus1 = 119894(119894 = 1 2 3) minus1 = 119883minus1 = and using the idea of thecone complementary linearization algorithm the guaranteedcost fault-tolerant controller of system (21) and the value ofoptimal performance indicator 119869lowast can be obtained in thefollowing method
Minimize 119905119903119886119888119890 (11 + 22 + 33 + + )+ 1205734 + 0512057311205781198983 + 051205732 (12057812 minus 1205781198982)+ 051205733 (1205781198722 minus 12057812)
Subject to 119868119899119890119902119906119886119897119894119905119894119890119904 (62) [minus120573119894119868
lowast minus119894] lt 0 (119894 = 1 2 3)
[minus1205734119868 lowast minus] lt 0
[119883 119868lowast ] ge 0
[1 119868lowast 1] ge 0
[2 119868lowast 2] ge 0
Mathematical Problems in Engineering 15
[3 119868lowast 3] ge 0
[ 119868lowast ] ge 0
119894 gt 0 (119894 = 1 2 3) (68)
5 Simulations
Example 11 Consider inverted pendulum model that canusually be modelled as (1) and the system parameters aregiven as follows
119860 = [minus2 1110 4 ]
119861 = [01minus4]
119862 = [minus03151 01011 03]
119867 = [015 minus056minus01 032 ]
Δ119860 = [004 sin 119905 015 sin 119905minus02 sin 119905 075 sin 119905]
Δ119861 = [002 sin 119905minus01 sin 119905]
119863 = [ 01minus05]
119865 (119905) = sin 119905
(69)
Therefore we have
1198641 = [04 15] 1198642 = 02 (70)
For this simulation the initial state of system is assumed119909(0) = [2 minus1]119879 and the external disturbance is considered as120596(119905) = [015 minus05]119879 3119904 le 119905 le 4119904
0 119900119905ℎ119890119903119904 Here we take the upper
bound of time-varying delay as 120578119872 = 03119904 and its lower boundas 120578119898 = 0119904 namely 0 le 120578(119905) le 03 In addition the faultbounds of the system are given in Table 1
Table 1 The bounds of faults
Symbol Upper bound Lower boundActuatorfaultsΘ 136 009
SensorFaults119866
[[
165 00 175]
][[
0 00 015]
]
minus01
0
01
02
03
04
05
Del
ay
1 2 3 4 5 60Time s
Figure 2 The time-varying delay in double-fault NCS
We choose the parameters as follows
1205821 = 011205822 = 0151205823 = minus0641205824 = 031205825 = 1205826 = 0351205827 = 181198782 = 0311205881 = 30001205882 = 22032ℓ = 1
1198781 = [10013 00 9207]
(71)
By taking advantage of the LMI tool box and inserting theabove parameters into inequalities 10 and (68) we can obtainthe 119867infin guaranteed cost control gain
119870 = 119884119883minus1198791198660minus1 = [85163 151398] (72)
with 120574 = radic120583 = 1952516The corresponding optimal performance indicator (the
upper bound value of guaranteed cost function) is 119869lowast =83162563The time-varying delay is shown in Figure 2 In Figure 3
(a) is the actuator fault which is a piecewise-linear function
16 Mathematical Problems in Engineering
002040608
1121416
Actu
ator
faul
t
1 2 3 4 5 60Time s
(a) Time-varying actuator fault
minus020
02040608
112141618
Sens
or fa
ult
1 2 3 4 5 60Time s
(b) Time-varying sensor fault
Figure 3 The time-varying faults
x1
x2
1 2 3 4 5 60Time s
minus15
minus1
minus05
0
05
1
15
2
Stat
e X
Figure 4 The state response curve of double-fault NCS
1 2 3 4 5 60Time s
minus8minus7minus6minus5minus4minus3minus2minus1
012
Con
trol i
nput
Figure 5 The control input of double-fault NCS
It keeps the minimum value from 13119904 to 17119904 while it keepsthe maximum value from 37119904 to 43119904 The sensor faults areshown as (b) which is sinusoidal It should be noted thatthe green dotted line represents the fault of sensor 1 whilethe blue solid line represents the fault of sensor 2 Throughthe state response of the double-fault NCS shown in Figure 4and corresponding control signal shown in Figure 5 we know
x1
x2
1 2 3 4 5 60Time s
minus8
minus6
minus4
minus2
0
2
4
6
Stat
e X
Figure 6 The state response curve of double-fault NCS
the 119867infin guaranteed cost controller designed in this paper isable to make the double-fault NCS asymptotically stable Thesystem gets preliminarily steady at 2119904 and its state can returnto the equilibrium position in a certain period of time whenthe NCS is affected by external disturbance Compared withthe state response of worse stability shown in Figure 6 whenthe method proposed in [28] is used for this double-faultproblem it sufficiently proves the effectiveness and feasibilityof the method proposed in this paper
To better illustrate the effectiveness of the method pro-posed in this paper the following example is presented
Example 12 Consider the parameters of system (1) as follows
119860 = [[[[[[
021 0 035 10 minus53 minus586 323
365 minus11 minus156 minus0890 0 minus158 minus285
]]]]]]
119861 = [559 12 minus089 13]119879 119862 = [17 02 015 minus018]
Mathematical Problems in Engineering 17
minus15
minus1
minus05
0
05
1
15
Stat
e X1 2 3 4 5 6 7 8 9 100
Time s
R1R2
R3R4
Figure 7 The state response curve of double-fault NCS
Δ119860 = [[[[
082 sin 119905 0 0 00 012 sin 119905 0 00 0 minus058 sin 119905 00 0 0 101 sin 119905]]]]
Δ119861 = [[[[
minus015 sin 119905008 sin 1199050minus028 sin 119905]]]]
119867 = [[[[
minus041 096 052 0006 minus057 0 021121 0 059 0minus032 minus011 minus035 minus003]]]]
119863 = 1198684times4119865 (119905) = diag (sin 119905 sin 119905 sin 119905 sin 119905)
(73)
Therefore we have
1198641 = diag (082 012 minus058 101) 1198642 = [minus015 008 0 minus028]119879 (74)
For this simulation the initial state of system is assumedas 119909(0) = [121 minus051 023 minus018]119879 and the externaldisturbance is considered as
120596 (119905) = [015 cos 119905 015 cos 119905 minus012 sin 119905 minus025 cos 119905]119879 6119904 le 119905 le 81199040 119900119905ℎ119890119903119904 (75)
The uncertain time-varying delay satisfies 0 le 120578(119905) le023119904 In addition the fault bounds of the system are givenin Table 2 Other parameters are selected as follows
1205821 = 121205822 = minus2031205823 = 1681205824 = minus231205825 = minus1051205826 = 6051205827 = 5121198781 = diag (19888 15634 8709 12876) 1198782 = 586
1205881 = 57981205882 = 1879ℓ = 1
(76)
By taking advantage of the LMI tool box and submittingthese parameters above into inequalities 10 and (68) we canobtain the 119867infin guaranteed cost control gain
119870 = 119884119883minus1198791198660minus1= [minus17256 15512 minus08571 07451]
with 120574 = radic120583 = 5819806(77)
The corresponding optimal performance indicator is 119869lowast =65021047 From the state response shown in Figure 7 andcontrol signal shown in Figure 8 we undoubtedly know
18 Mathematical Problems in Engineering
Table 2 The bounds of faults
Symbol Upper bound Lower boundActuatorfaultsΘ 150 012
SensorFaults119866
[[[[[[[[
185 0 0 00 160 0 00 0 125 00 0 0 165
]]]]]]]]
[[[[[[[[
025 0 0 00 0 0 00 0 0 00 0 0 015
]]]]]]]]
minus4
minus3
minus2
minus1
0
1
2
Con
trol i
nput
1 2 3 4 5 6 7 8 9 100Time s
Figure 8 The control input of double-fault NCS
the double-fault NCS is asymptotically stable when the 119867infinguaranteed cost controller is used This further demonstratesthe feasibility and effectiveness of the method proposed inthis paper
6 Conclusions
The issues of modelling and 119867infin guaranteed cost fault-tolerant control of double-fault networked control systemshave been addressedThe closed-loopmodel of a double-faultNCS is set up with regard to the influences of transmissiondelay packet dropout uncertain parameters and externaldisturbance In addition the piecewise delay method is pro-posed to reduce the conservatism when analysing the delay-dependent faulty system With the help of Lee Y Srsquos lemmathe sufficient condition of guaranteed cost fault-tolerantfor time-varying double-fault NCS is introduced using theLyapunov-Krasovskii theory and weighted technology Themethod of designing a guaranteed cost fault-tolerant con-troller for this NCS is given based on LMI Our next researchtask will be choosing more reasonable values of parameters120582119894 (119894 = 1 2 3 4 5 6 7) to reduce the conservatism further Ofcourse the study on scheduling policy of double-fault NCS isalso a challenge but indispensable work
Data Availability
The data used in this paper can be got by simulations
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was partly supported by National Nature Sci-ence Foundation of China under Grants 51875380 51375323and 61563022 Cooperative Innovation Fund-Prospective ofJiangsu Province under Grant BY2016044-01Major Programof Natural Science Foundation of Jiangxi Province Chinaunder Grant 20152ACB20009 High Level Talents of ldquoSix Tal-ent Peaksrdquo in Jiangsu Province China under Grant DZXX-046
References
[1] H Zhang Y Shi J Wang and H Chen ldquoA New Delay-compensation Scheme for Networked Control Systems inController Area Networksrdquo IEEE Transactions on IndustrialElectronics vol 65 no 9 pp 7239ndash7247 2018
[2] A Da Silva and C Kawan ldquoRobustness of critical bit rates forpractical stabilization of networked control systemsrdquo Automat-ica vol 93 pp 397ndash406 2018
[3] Q Zhu K Lu and Y Zhu ldquoGuaranteed cost control ofnetworked control systems under transmission control protocolwith active queue managementrdquo Asian Journal of Control vol18 no 4 pp 1546ndash1557 2016
[4] Q Zhu K Lu and Y Zhu ldquoHinfin Guaranteed Cost Control forNetworked Control Systems under Scheduling Policy Based onPredicted Errorrdquo Mathematical Problems in Engineering vol2014 Article ID 586029 12 pages 2014
[5] W H Chen J X Xu and Z H Guan ldquoGuaranteed cost controlfor uncertain Markovian jump systems with mode-dependenttime-delaysrdquo IEEE Transactions on Automatic Control vol 48no 12 pp 2270ndash2277 2003
[6] HM Soliman A DabroumM S Mahmoud andM SolimanldquoGuaranteed-cost reliable control with regional pole placementof a power systemrdquo Journal of 13e Franklin Institute vol 348no 5 pp 884ndash898 2011
[7] X Li and X-B Wu ldquoGuaranteed cost fault-tolerant controllerdesign of networked control systems under variable-periodsamplingrdquo Information Technology Journal vol 8 no 4 pp 537ndash543 2009
[8] L Zhang and G Orosz ldquoMotif-Based Design for ConnectedVehicle Systems in Presence of Heterogeneous ConnectivityStructures and Time Delaysrdquo IEEE Transactions on IntelligentTransportation Systems vol 17 no 6 pp 1638ndash1651 2016
[9] Z Li G Guo and Z Liu ldquoCommunication parameter designfor networked control systems with the slotted ALOHA accessprotocolrdquo Information Sciences vol 447 pp 205ndash215 2018
[10] K Lu G Jing and L Wang ldquoDistributed algorithm for solv-ing convex inequalitiesrdquo Institute of Electrical and ElectronicsEngineers Transactions on Automatic Control vol 63 no 8 pp2670ndash2677 2018
[11] Q Zhu K Lu and Y Zhu ldquoObserver-based feedback controlof networked control systems with delays and packet dropoutsrdquoJournal of Dynamic SystemsMeasurement andControl vol 138no 2 pp 1ndash8 2016
Mathematical Problems in Engineering 19
[12] Y Li H Li and W Sun ldquoEvent-triggered control for robust setstabilization of logical control networksrdquo Automatica vol 95pp 556ndash560 2018
[13] X Luan P Shi and F Liu ldquoStabilization of networked controlsystems with random delaysrdquo IEEE Transactions on IndustrialElectronics vol 58 no 9 pp 4323ndash4330 2011
[14] Y Zhang and J Jiang ldquoBibliographical review on reconfigurablefault-tolerant control systemsrdquo Annual Reviews in Control vol32 no 2 pp 229ndash252 2008
[15] N H Ei-Farra A Gani and P D Christofides ldquoFault-tolerantcontrol of process systems using communication networksrdquoAIChE Journal vol 51 no 6 pp 1665ndash1682 2005
[16] H R Karimi and H Gao ldquoNew delay-dependent exponentialHinfin synchronization for uncertain neural networks withmixedtime delaysrdquo IEEE Transactions on Systems Man and Cybernet-ics Part B Cybernetics vol 40 no 1 pp 173ndash185 2010
[17] Y N Guo Q Y Zhang D W Gong and J H Zhang ldquoRobustfault-tolerant control of networked control systems with time-varying delaysrdquoControl andDecision vol 23 no 6 pp 689ndash6922008
[18] Z Mao and B Jiang ldquoFault identification and fault-tolerantcontrol for a class of networked control systemsrdquo InternationalJournal of Innovative Computing Information and Control vol3 no 5 pp 1121ndash1130 2007
[19] C-X Yang Z-H Guan and J Huang ldquoStochastic fault tolerantcontrol of networked control systemsrdquo Journal of 13e FranklinInstitute vol 346 no 10 pp 1006ndash1020 2009
[20] Z Mao Y Pan B Jiang and W Chen ldquoFault Detectionfor a Class of Nonlinear Networked Control Systems withCommunication Constraintsrdquo International Journal of ControlAutomation and Systems vol 16 no 1 pp 256ndash264 2018
[21] A Qiu J Gu C Wen and J Zhang ldquoSelf-triggered faultestimation and fault tolerant control for networked controlsystemsrdquo Neurocomputing vol 272 no 1 pp 629ndash637 2018
[22] Q Zhu K Lu G Xie and Y Zhu ldquoGuaranteed Cost Fault-Tolerant Control for Networked Control Systems with SensorFaultsrdquoMathematical Problems in Engineering vol 2015 ArticleID 549347 9 pages 2015
[23] W Wu and Y Zhang ldquoEvent-triggered fault-tolerant controland scheduling codesign for nonlinear networked control sys-tems with medium-access constraint and packet disorderingrdquoInternational Journal of Robust and Nonlinear Control vol 28no 4 pp 1182ndash1198 2018
[24] X Xiao and X-J Li ldquoAdaptive dynamic programming method-based synchronisation control of a class of complex dynamicalnetworks with unknown dynamics and actuator faultsrdquo IETControl 13eory amp Applications vol 12 no 2 pp 291ndash298 2018
[25] PMhaskar AGani CMcFall PDChristofides and J FDavisldquoFault-tolerant control of nonlinear process systems subject tosensor faultsrdquo AIChE Journal vol 53 no 3 pp 654ndash668 2007
[26] M Liu P Shi L Zhang and X Zhao ldquoFault-tolerant controlfor nonlinear Markovian jump systems via proportional andderivative sliding mode observer techniquerdquo IEEE Transactionson Circuits and Systems I Regular Papers vol 58 no 11 pp2755ndash2764 2011
[27] S Li D Sauter C Aubrun and J Yame ldquoStability guaranteedactive fault-tolerant control of networked control systemsrdquoJournal of Control Science and Engineering vol 2008 Article ID189064 9 pages 2008
[28] X Y Luo M J Shang C L Chen and X P Guan ldquoGuaranteedcost active fault-tolerant control of networked control system
with packet dropout and transmission delayrdquo InternationalJournal of Automation and Computing vol 7 no 4 pp 509ndash5152010
[29] Q Zhu B Xie and Y Zhu ldquoGuaranteed Cost Control forMultirate Networked Control Systems with Both Time-Delayand Packet-Dropoutrdquo Mathematical Problems in Engineeringvol 2014 Article ID 637329 9 pages 2014
[30] R Manivannan R Samidurai J Cao and M Perc ldquoDesign ofResilient Reliable Dissipativity Control for Systems with Actu-ator Faults and Probabilistic Time-Delay Signals via Sampled-Data Approachrdquo IEEE Transactions on Systems Man andCybernetics Systems 2018
[31] R Manivannan R Samidurai J Cao A Alsaedi and F EAlsaadi ldquoNon-Fragile Extended Dissipativity Control Designfor Generalized Neural Networks with Interval Time-DelaySignalsrdquo Asian Journal of Control 2019
[32] Q Gao and N Olgac ldquoBounds of imaginary spectra of LTIsystems in the domain of two of the multiple time delaysrdquoAutomatica vol 72 pp 235ndash241 2016
[33] Q Gao A S Kammer U Zalluhoglu and N Olgac ldquoCriticaleffects of the polarity change in delayed states within anLTI dynamics with multiple delaysrdquo Institute of Electrical andElectronics Engineers Transactions onAutomatic Control vol 60no 11 pp 3018ndash3022 2015
[34] Q Gao Z Zhang and C Yang ldquoSign inverting control andits important properties for multiple time-delayed systemsrdquo inProceedings of the 10th ASME Dynamic Systems and ControlConference pp 979ndash984 Virginia USA 2017
[35] Y M Zhang and J Jiang ldquoActive fault-tolerant control systemagainst partial actuator failuresrdquo IEE Proceedings Control13eoryand Applications vol 149 no 1 pp 95ndash104 2002
[36] G Garcia J Bernussou andD Arzelier ldquoRobust stabilization ofdiscrete-time linear systems with norm-bounded time-varyinguncertaintyrdquo Systems amp Control Letters vol 22 no 5 pp 327ndash339 1994
[37] Y Wang L Xie and C E de Souza ldquoRobust control of a classof uncertain nonlinear systemsrdquo Systems amp Control Letters vol19 no 2 pp 139ndash149 1992
[38] D Yue E Tian and Y Zhang ldquoA piecewise analysis methodto stability analysis of linear continuousdiscrete systems withtime-varying delayrdquo International Journal of Robust and Non-linear Control vol 19 no 13 pp 1493ndash1518 2009
[39] X-J Jing D-L Tan and Y-C Wang ldquoAn LMI approach tostability of systems with severe time-delayrdquo IEEE Transactionson Automatic Control vol 49 no 7 pp 1192ndash1195 2004
[40] D Yue Q-L Han and J Lam ldquoNetwork-based robust Hinfincontrol of systems with uncertaintyrdquo Automatica vol 41 no 6pp 999ndash1007 2005
[41] Z Wang F Yang D W C Ho and X Liu ldquoRobust Hinfincontrol for networked systemswith randompacket lossesrdquo IEEETransactions on Systems Man and Cybernetics Part B vol 37no 4 pp 916ndash924 2007
[42] M S Mahmoud ldquoControl of uncertain state-delay systemsguaranteed cost approachrdquo IMA Journal of Mathematical Con-trol and Information vol 18 no 1 pp 109ndash128 2001
[43] D Yue C Peng andG Y Tang ldquoGuaranteed cost control of lin-ear systems over networks with state and input quantisationsrdquoIEE Proceedings Control 13eory and Applications vol 153 no 6pp 658ndash664 2006
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

14 Mathematical Problems in Engineering
Θ = [(1205821119861Θ0119884)119879 (1205822119861Θ0119884)119879 (1205823119861Θ0119884)119879 (1205824119861Θ0119884)119879 (119861Θ0119884)119879 (1205825119861Θ0119884)119879 (1205826119861119884)119879 + (1205827119861119884)119879 0]119879 Δ = [(1205821119861Θ0)119879 (1205822119861Θ0)119879 (1205823119861Θ0)119879 (1205824119861Θ0)119879 (119861Θ0)119879 (1205825119861Θ0)119879 (1205826119861Θ0)119879 + (1205827119861Θ0)119879 0]119879
119884 = [0 0 0 0 0 119884 0 0] Σ = [0 0 0 0 0 Θ0119884 0 0]
(63)
then the 119867infin guaranteed cost control gain 119870 = 119884119883minus1198791198660minus1 canrendermodel (21) to be asymptotically stable with the119867infin normbound 120574 = radic120583 13e upper bound 1198690 of cost function 119869 is givenas
1198690 = 119909119879 (0) 119883minus1119883minus119879119909 (0)+ 120578119898 int0
minus120578119898
int0119904
1199091015840119879 (120591) 119883minus11119883minus1198791199091015840 (120591) 119889119904119889120591+ intminus120578119898minus1205781
int0119904
1199091015840119879 (120591) 119883minus12119883minus1198791199091015840 (120591) 119889119904119889120591+ intminus1205781minus120578119872
int0119904
1199091015840119879 (120591) 119883minus13119883minus1198791199091015840 (120591) 119889119904119889120591
(64)
Proof The proof is based on a suitable transformation anda change of variables allowing us to obtain inequality (24)in Theorem 8 First we define 1198805 = 1198800 119880119894 = 1205821198941198800 (119894 =from 1 to 4) 1198806 = 12058251198800 in (24) Because we consider thedimension of state119909is equal to that of outside disturbance120596 in this paper we can also define 1198807 = 12058261198800 1198808 =12058271198800 Obviously (24) implies 1198805 gt 0 so 1198800 is nonsingularThen using the analysis method of D Yue [40] and Z Wang[41] pre- and postmultiplying both sides of inequality (24)with diag(119868 119868 119868 119883 119868 119883 119868 119868 119868) and its transpose where = diag(119883 119883 119883 119883 119883 119883 119883 119883) and 119883 = 1198800minus1 introducingnew variables 119883119875119883119879 = 119883119877119895119883119879 = 119895 (119895 = 1 2 3)119883119872119897120573119883119879 = 119897120573 119883119873119897120573119883119879 = 119897120573 (119897 = 1 2 120573 = 1 2 sdot sdot sdot 8)1198701198660119883119879 = 119884 and 120583 = 1205742 From the definition of 1198660 we know1198660 is invertible so 119870 can be obtained by calculating 119870 =119884119883minus1198791198660minus1 It is easy to see that 10 and (64) respectively imply(24) and (26) Therefore from Theorem 8 we can completethe proof
To obtain the optimal bound 119869lowast shown in (26) thecommonly used method is to consider it as an optimizationproblem like [42] in which the expression of initial state 119909(119905)(119905 isin [minus120578119872 0]) needs to be known The expression of initialstate is not given in this paper Therefore the optimizationmethod used in [42] cannot be used here A practical methodto obtain 119869lowast also used by D Yue [43] is employed as follows
Suppose 1199091015840(119905) is bounded if 119905 isin [minus120578119872 0] and satisfying1199091015840119879(120591)1199091015840(120591) le ℓ In addition suppose that there exists 120573119894 gt0 (119894 = 1 2 3) satisfying119883minus1119894119883minus119879 le 120573119894119868 119894 = 1 2 3119883minus1119883minus119879 le 1205734119868 (65)
Inserting this into (64) we have
1198690 le 1205734119909119879 (0) 119909 (0) + 05ℓ12057311205781198983 + 05ℓ1205732 (12057812 minus 1205781198982)+ 05ℓ1205733 (1205781198722 minus 12057812) = 119869lowast (66)
Applying the Schur complement to the inequalities above wehave
[minus120573119894119868 119883minus1lowast minus119877119894minus1] lt 0 119894 = 1 2 3
[minus1205734119868 119883minus1lowast minus119875minus1] lt 0
(67)
Then combining 10 and (67) 119894minus1 119894 (119894 = 1 2 3)minus1 119883minus1 119883 exist simultaneously We cannot directly usethe LMI tools to solve the problem Defining 119894minus1 = 119894(119894 = 1 2 3) minus1 = 119883minus1 = and using the idea of thecone complementary linearization algorithm the guaranteedcost fault-tolerant controller of system (21) and the value ofoptimal performance indicator 119869lowast can be obtained in thefollowing method
Minimize 119905119903119886119888119890 (11 + 22 + 33 + + )+ 1205734 + 0512057311205781198983 + 051205732 (12057812 minus 1205781198982)+ 051205733 (1205781198722 minus 12057812)
Subject to 119868119899119890119902119906119886119897119894119905119894119890119904 (62) [minus120573119894119868
lowast minus119894] lt 0 (119894 = 1 2 3)
[minus1205734119868 lowast minus] lt 0
[119883 119868lowast ] ge 0
[1 119868lowast 1] ge 0
[2 119868lowast 2] ge 0
Mathematical Problems in Engineering 15
[3 119868lowast 3] ge 0
[ 119868lowast ] ge 0
119894 gt 0 (119894 = 1 2 3) (68)
5 Simulations
Example 11 Consider inverted pendulum model that canusually be modelled as (1) and the system parameters aregiven as follows
119860 = [minus2 1110 4 ]
119861 = [01minus4]
119862 = [minus03151 01011 03]
119867 = [015 minus056minus01 032 ]
Δ119860 = [004 sin 119905 015 sin 119905minus02 sin 119905 075 sin 119905]
Δ119861 = [002 sin 119905minus01 sin 119905]
119863 = [ 01minus05]
119865 (119905) = sin 119905
(69)
Therefore we have
1198641 = [04 15] 1198642 = 02 (70)
For this simulation the initial state of system is assumed119909(0) = [2 minus1]119879 and the external disturbance is considered as120596(119905) = [015 minus05]119879 3119904 le 119905 le 4119904
0 119900119905ℎ119890119903119904 Here we take the upper
bound of time-varying delay as 120578119872 = 03119904 and its lower boundas 120578119898 = 0119904 namely 0 le 120578(119905) le 03 In addition the faultbounds of the system are given in Table 1
Table 1 The bounds of faults
Symbol Upper bound Lower boundActuatorfaultsΘ 136 009
SensorFaults119866
[[
165 00 175]
][[
0 00 015]
]
minus01
0
01
02
03
04
05
Del
ay
1 2 3 4 5 60Time s
Figure 2 The time-varying delay in double-fault NCS
We choose the parameters as follows
1205821 = 011205822 = 0151205823 = minus0641205824 = 031205825 = 1205826 = 0351205827 = 181198782 = 0311205881 = 30001205882 = 22032ℓ = 1
1198781 = [10013 00 9207]
(71)
By taking advantage of the LMI tool box and inserting theabove parameters into inequalities 10 and (68) we can obtainthe 119867infin guaranteed cost control gain
119870 = 119884119883minus1198791198660minus1 = [85163 151398] (72)
with 120574 = radic120583 = 1952516The corresponding optimal performance indicator (the
upper bound value of guaranteed cost function) is 119869lowast =83162563The time-varying delay is shown in Figure 2 In Figure 3
(a) is the actuator fault which is a piecewise-linear function
16 Mathematical Problems in Engineering
002040608
1121416
Actu
ator
faul
t
1 2 3 4 5 60Time s
(a) Time-varying actuator fault
minus020
02040608
112141618
Sens
or fa
ult
1 2 3 4 5 60Time s
(b) Time-varying sensor fault
Figure 3 The time-varying faults
x1
x2
1 2 3 4 5 60Time s
minus15
minus1
minus05
0
05
1
15
2
Stat
e X
Figure 4 The state response curve of double-fault NCS
1 2 3 4 5 60Time s
minus8minus7minus6minus5minus4minus3minus2minus1
012
Con
trol i
nput
Figure 5 The control input of double-fault NCS
It keeps the minimum value from 13119904 to 17119904 while it keepsthe maximum value from 37119904 to 43119904 The sensor faults areshown as (b) which is sinusoidal It should be noted thatthe green dotted line represents the fault of sensor 1 whilethe blue solid line represents the fault of sensor 2 Throughthe state response of the double-fault NCS shown in Figure 4and corresponding control signal shown in Figure 5 we know
x1
x2
1 2 3 4 5 60Time s
minus8
minus6
minus4
minus2
0
2
4
6
Stat
e X
Figure 6 The state response curve of double-fault NCS
the 119867infin guaranteed cost controller designed in this paper isable to make the double-fault NCS asymptotically stable Thesystem gets preliminarily steady at 2119904 and its state can returnto the equilibrium position in a certain period of time whenthe NCS is affected by external disturbance Compared withthe state response of worse stability shown in Figure 6 whenthe method proposed in [28] is used for this double-faultproblem it sufficiently proves the effectiveness and feasibilityof the method proposed in this paper
To better illustrate the effectiveness of the method pro-posed in this paper the following example is presented
Example 12 Consider the parameters of system (1) as follows
119860 = [[[[[[
021 0 035 10 minus53 minus586 323
365 minus11 minus156 minus0890 0 minus158 minus285
]]]]]]
119861 = [559 12 minus089 13]119879 119862 = [17 02 015 minus018]
Mathematical Problems in Engineering 17
minus15
minus1
minus05
0
05
1
15
Stat
e X1 2 3 4 5 6 7 8 9 100
Time s
R1R2
R3R4
Figure 7 The state response curve of double-fault NCS
Δ119860 = [[[[
082 sin 119905 0 0 00 012 sin 119905 0 00 0 minus058 sin 119905 00 0 0 101 sin 119905]]]]
Δ119861 = [[[[
minus015 sin 119905008 sin 1199050minus028 sin 119905]]]]
119867 = [[[[
minus041 096 052 0006 minus057 0 021121 0 059 0minus032 minus011 minus035 minus003]]]]
119863 = 1198684times4119865 (119905) = diag (sin 119905 sin 119905 sin 119905 sin 119905)
(73)
Therefore we have
1198641 = diag (082 012 minus058 101) 1198642 = [minus015 008 0 minus028]119879 (74)
For this simulation the initial state of system is assumedas 119909(0) = [121 minus051 023 minus018]119879 and the externaldisturbance is considered as
120596 (119905) = [015 cos 119905 015 cos 119905 minus012 sin 119905 minus025 cos 119905]119879 6119904 le 119905 le 81199040 119900119905ℎ119890119903119904 (75)
The uncertain time-varying delay satisfies 0 le 120578(119905) le023119904 In addition the fault bounds of the system are givenin Table 2 Other parameters are selected as follows
1205821 = 121205822 = minus2031205823 = 1681205824 = minus231205825 = minus1051205826 = 6051205827 = 5121198781 = diag (19888 15634 8709 12876) 1198782 = 586
1205881 = 57981205882 = 1879ℓ = 1
(76)
By taking advantage of the LMI tool box and submittingthese parameters above into inequalities 10 and (68) we canobtain the 119867infin guaranteed cost control gain
119870 = 119884119883minus1198791198660minus1= [minus17256 15512 minus08571 07451]
with 120574 = radic120583 = 5819806(77)
The corresponding optimal performance indicator is 119869lowast =65021047 From the state response shown in Figure 7 andcontrol signal shown in Figure 8 we undoubtedly know
18 Mathematical Problems in Engineering
Table 2 The bounds of faults
Symbol Upper bound Lower boundActuatorfaultsΘ 150 012
SensorFaults119866
[[[[[[[[
185 0 0 00 160 0 00 0 125 00 0 0 165
]]]]]]]]
[[[[[[[[
025 0 0 00 0 0 00 0 0 00 0 0 015
]]]]]]]]
minus4
minus3
minus2
minus1
0
1
2
Con
trol i
nput
1 2 3 4 5 6 7 8 9 100Time s
Figure 8 The control input of double-fault NCS
the double-fault NCS is asymptotically stable when the 119867infinguaranteed cost controller is used This further demonstratesthe feasibility and effectiveness of the method proposed inthis paper
6 Conclusions
The issues of modelling and 119867infin guaranteed cost fault-tolerant control of double-fault networked control systemshave been addressedThe closed-loopmodel of a double-faultNCS is set up with regard to the influences of transmissiondelay packet dropout uncertain parameters and externaldisturbance In addition the piecewise delay method is pro-posed to reduce the conservatism when analysing the delay-dependent faulty system With the help of Lee Y Srsquos lemmathe sufficient condition of guaranteed cost fault-tolerantfor time-varying double-fault NCS is introduced using theLyapunov-Krasovskii theory and weighted technology Themethod of designing a guaranteed cost fault-tolerant con-troller for this NCS is given based on LMI Our next researchtask will be choosing more reasonable values of parameters120582119894 (119894 = 1 2 3 4 5 6 7) to reduce the conservatism further Ofcourse the study on scheduling policy of double-fault NCS isalso a challenge but indispensable work
Data Availability
The data used in this paper can be got by simulations
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was partly supported by National Nature Sci-ence Foundation of China under Grants 51875380 51375323and 61563022 Cooperative Innovation Fund-Prospective ofJiangsu Province under Grant BY2016044-01Major Programof Natural Science Foundation of Jiangxi Province Chinaunder Grant 20152ACB20009 High Level Talents of ldquoSix Tal-ent Peaksrdquo in Jiangsu Province China under Grant DZXX-046
References
[1] H Zhang Y Shi J Wang and H Chen ldquoA New Delay-compensation Scheme for Networked Control Systems inController Area Networksrdquo IEEE Transactions on IndustrialElectronics vol 65 no 9 pp 7239ndash7247 2018
[2] A Da Silva and C Kawan ldquoRobustness of critical bit rates forpractical stabilization of networked control systemsrdquo Automat-ica vol 93 pp 397ndash406 2018
[3] Q Zhu K Lu and Y Zhu ldquoGuaranteed cost control ofnetworked control systems under transmission control protocolwith active queue managementrdquo Asian Journal of Control vol18 no 4 pp 1546ndash1557 2016
[4] Q Zhu K Lu and Y Zhu ldquoHinfin Guaranteed Cost Control forNetworked Control Systems under Scheduling Policy Based onPredicted Errorrdquo Mathematical Problems in Engineering vol2014 Article ID 586029 12 pages 2014
[5] W H Chen J X Xu and Z H Guan ldquoGuaranteed cost controlfor uncertain Markovian jump systems with mode-dependenttime-delaysrdquo IEEE Transactions on Automatic Control vol 48no 12 pp 2270ndash2277 2003
[6] HM Soliman A DabroumM S Mahmoud andM SolimanldquoGuaranteed-cost reliable control with regional pole placementof a power systemrdquo Journal of 13e Franklin Institute vol 348no 5 pp 884ndash898 2011
[7] X Li and X-B Wu ldquoGuaranteed cost fault-tolerant controllerdesign of networked control systems under variable-periodsamplingrdquo Information Technology Journal vol 8 no 4 pp 537ndash543 2009
[8] L Zhang and G Orosz ldquoMotif-Based Design for ConnectedVehicle Systems in Presence of Heterogeneous ConnectivityStructures and Time Delaysrdquo IEEE Transactions on IntelligentTransportation Systems vol 17 no 6 pp 1638ndash1651 2016
[9] Z Li G Guo and Z Liu ldquoCommunication parameter designfor networked control systems with the slotted ALOHA accessprotocolrdquo Information Sciences vol 447 pp 205ndash215 2018
[10] K Lu G Jing and L Wang ldquoDistributed algorithm for solv-ing convex inequalitiesrdquo Institute of Electrical and ElectronicsEngineers Transactions on Automatic Control vol 63 no 8 pp2670ndash2677 2018
[11] Q Zhu K Lu and Y Zhu ldquoObserver-based feedback controlof networked control systems with delays and packet dropoutsrdquoJournal of Dynamic SystemsMeasurement andControl vol 138no 2 pp 1ndash8 2016
Mathematical Problems in Engineering 19
[12] Y Li H Li and W Sun ldquoEvent-triggered control for robust setstabilization of logical control networksrdquo Automatica vol 95pp 556ndash560 2018
[13] X Luan P Shi and F Liu ldquoStabilization of networked controlsystems with random delaysrdquo IEEE Transactions on IndustrialElectronics vol 58 no 9 pp 4323ndash4330 2011
[14] Y Zhang and J Jiang ldquoBibliographical review on reconfigurablefault-tolerant control systemsrdquo Annual Reviews in Control vol32 no 2 pp 229ndash252 2008
[15] N H Ei-Farra A Gani and P D Christofides ldquoFault-tolerantcontrol of process systems using communication networksrdquoAIChE Journal vol 51 no 6 pp 1665ndash1682 2005
[16] H R Karimi and H Gao ldquoNew delay-dependent exponentialHinfin synchronization for uncertain neural networks withmixedtime delaysrdquo IEEE Transactions on Systems Man and Cybernet-ics Part B Cybernetics vol 40 no 1 pp 173ndash185 2010
[17] Y N Guo Q Y Zhang D W Gong and J H Zhang ldquoRobustfault-tolerant control of networked control systems with time-varying delaysrdquoControl andDecision vol 23 no 6 pp 689ndash6922008
[18] Z Mao and B Jiang ldquoFault identification and fault-tolerantcontrol for a class of networked control systemsrdquo InternationalJournal of Innovative Computing Information and Control vol3 no 5 pp 1121ndash1130 2007
[19] C-X Yang Z-H Guan and J Huang ldquoStochastic fault tolerantcontrol of networked control systemsrdquo Journal of 13e FranklinInstitute vol 346 no 10 pp 1006ndash1020 2009
[20] Z Mao Y Pan B Jiang and W Chen ldquoFault Detectionfor a Class of Nonlinear Networked Control Systems withCommunication Constraintsrdquo International Journal of ControlAutomation and Systems vol 16 no 1 pp 256ndash264 2018
[21] A Qiu J Gu C Wen and J Zhang ldquoSelf-triggered faultestimation and fault tolerant control for networked controlsystemsrdquo Neurocomputing vol 272 no 1 pp 629ndash637 2018
[22] Q Zhu K Lu G Xie and Y Zhu ldquoGuaranteed Cost Fault-Tolerant Control for Networked Control Systems with SensorFaultsrdquoMathematical Problems in Engineering vol 2015 ArticleID 549347 9 pages 2015
[23] W Wu and Y Zhang ldquoEvent-triggered fault-tolerant controland scheduling codesign for nonlinear networked control sys-tems with medium-access constraint and packet disorderingrdquoInternational Journal of Robust and Nonlinear Control vol 28no 4 pp 1182ndash1198 2018
[24] X Xiao and X-J Li ldquoAdaptive dynamic programming method-based synchronisation control of a class of complex dynamicalnetworks with unknown dynamics and actuator faultsrdquo IETControl 13eory amp Applications vol 12 no 2 pp 291ndash298 2018
[25] PMhaskar AGani CMcFall PDChristofides and J FDavisldquoFault-tolerant control of nonlinear process systems subject tosensor faultsrdquo AIChE Journal vol 53 no 3 pp 654ndash668 2007
[26] M Liu P Shi L Zhang and X Zhao ldquoFault-tolerant controlfor nonlinear Markovian jump systems via proportional andderivative sliding mode observer techniquerdquo IEEE Transactionson Circuits and Systems I Regular Papers vol 58 no 11 pp2755ndash2764 2011
[27] S Li D Sauter C Aubrun and J Yame ldquoStability guaranteedactive fault-tolerant control of networked control systemsrdquoJournal of Control Science and Engineering vol 2008 Article ID189064 9 pages 2008
[28] X Y Luo M J Shang C L Chen and X P Guan ldquoGuaranteedcost active fault-tolerant control of networked control system
with packet dropout and transmission delayrdquo InternationalJournal of Automation and Computing vol 7 no 4 pp 509ndash5152010
[29] Q Zhu B Xie and Y Zhu ldquoGuaranteed Cost Control forMultirate Networked Control Systems with Both Time-Delayand Packet-Dropoutrdquo Mathematical Problems in Engineeringvol 2014 Article ID 637329 9 pages 2014
[30] R Manivannan R Samidurai J Cao and M Perc ldquoDesign ofResilient Reliable Dissipativity Control for Systems with Actu-ator Faults and Probabilistic Time-Delay Signals via Sampled-Data Approachrdquo IEEE Transactions on Systems Man andCybernetics Systems 2018
[31] R Manivannan R Samidurai J Cao A Alsaedi and F EAlsaadi ldquoNon-Fragile Extended Dissipativity Control Designfor Generalized Neural Networks with Interval Time-DelaySignalsrdquo Asian Journal of Control 2019
[32] Q Gao and N Olgac ldquoBounds of imaginary spectra of LTIsystems in the domain of two of the multiple time delaysrdquoAutomatica vol 72 pp 235ndash241 2016
[33] Q Gao A S Kammer U Zalluhoglu and N Olgac ldquoCriticaleffects of the polarity change in delayed states within anLTI dynamics with multiple delaysrdquo Institute of Electrical andElectronics Engineers Transactions onAutomatic Control vol 60no 11 pp 3018ndash3022 2015
[34] Q Gao Z Zhang and C Yang ldquoSign inverting control andits important properties for multiple time-delayed systemsrdquo inProceedings of the 10th ASME Dynamic Systems and ControlConference pp 979ndash984 Virginia USA 2017
[35] Y M Zhang and J Jiang ldquoActive fault-tolerant control systemagainst partial actuator failuresrdquo IEE Proceedings Control13eoryand Applications vol 149 no 1 pp 95ndash104 2002
[36] G Garcia J Bernussou andD Arzelier ldquoRobust stabilization ofdiscrete-time linear systems with norm-bounded time-varyinguncertaintyrdquo Systems amp Control Letters vol 22 no 5 pp 327ndash339 1994
[37] Y Wang L Xie and C E de Souza ldquoRobust control of a classof uncertain nonlinear systemsrdquo Systems amp Control Letters vol19 no 2 pp 139ndash149 1992
[38] D Yue E Tian and Y Zhang ldquoA piecewise analysis methodto stability analysis of linear continuousdiscrete systems withtime-varying delayrdquo International Journal of Robust and Non-linear Control vol 19 no 13 pp 1493ndash1518 2009
[39] X-J Jing D-L Tan and Y-C Wang ldquoAn LMI approach tostability of systems with severe time-delayrdquo IEEE Transactionson Automatic Control vol 49 no 7 pp 1192ndash1195 2004
[40] D Yue Q-L Han and J Lam ldquoNetwork-based robust Hinfincontrol of systems with uncertaintyrdquo Automatica vol 41 no 6pp 999ndash1007 2005
[41] Z Wang F Yang D W C Ho and X Liu ldquoRobust Hinfincontrol for networked systemswith randompacket lossesrdquo IEEETransactions on Systems Man and Cybernetics Part B vol 37no 4 pp 916ndash924 2007
[42] M S Mahmoud ldquoControl of uncertain state-delay systemsguaranteed cost approachrdquo IMA Journal of Mathematical Con-trol and Information vol 18 no 1 pp 109ndash128 2001
[43] D Yue C Peng andG Y Tang ldquoGuaranteed cost control of lin-ear systems over networks with state and input quantisationsrdquoIEE Proceedings Control 13eory and Applications vol 153 no 6pp 658ndash664 2006
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Mathematical Problems in Engineering 15
[3 119868lowast 3] ge 0
[ 119868lowast ] ge 0
119894 gt 0 (119894 = 1 2 3) (68)
5 Simulations
Example 11 Consider inverted pendulum model that canusually be modelled as (1) and the system parameters aregiven as follows
119860 = [minus2 1110 4 ]
119861 = [01minus4]
119862 = [minus03151 01011 03]
119867 = [015 minus056minus01 032 ]
Δ119860 = [004 sin 119905 015 sin 119905minus02 sin 119905 075 sin 119905]
Δ119861 = [002 sin 119905minus01 sin 119905]
119863 = [ 01minus05]
119865 (119905) = sin 119905
(69)
Therefore we have
1198641 = [04 15] 1198642 = 02 (70)
For this simulation the initial state of system is assumed119909(0) = [2 minus1]119879 and the external disturbance is considered as120596(119905) = [015 minus05]119879 3119904 le 119905 le 4119904
0 119900119905ℎ119890119903119904 Here we take the upper
bound of time-varying delay as 120578119872 = 03119904 and its lower boundas 120578119898 = 0119904 namely 0 le 120578(119905) le 03 In addition the faultbounds of the system are given in Table 1
Table 1 The bounds of faults
Symbol Upper bound Lower boundActuatorfaultsΘ 136 009
SensorFaults119866
[[
165 00 175]
][[
0 00 015]
]
minus01
0
01
02
03
04
05
Del
ay
1 2 3 4 5 60Time s
Figure 2 The time-varying delay in double-fault NCS
We choose the parameters as follows
1205821 = 011205822 = 0151205823 = minus0641205824 = 031205825 = 1205826 = 0351205827 = 181198782 = 0311205881 = 30001205882 = 22032ℓ = 1
1198781 = [10013 00 9207]
(71)
By taking advantage of the LMI tool box and inserting theabove parameters into inequalities 10 and (68) we can obtainthe 119867infin guaranteed cost control gain
119870 = 119884119883minus1198791198660minus1 = [85163 151398] (72)
with 120574 = radic120583 = 1952516The corresponding optimal performance indicator (the
upper bound value of guaranteed cost function) is 119869lowast =83162563The time-varying delay is shown in Figure 2 In Figure 3
(a) is the actuator fault which is a piecewise-linear function
16 Mathematical Problems in Engineering
002040608
1121416
Actu
ator
faul
t
1 2 3 4 5 60Time s
(a) Time-varying actuator fault
minus020
02040608
112141618
Sens
or fa
ult
1 2 3 4 5 60Time s
(b) Time-varying sensor fault
Figure 3 The time-varying faults
x1
x2
1 2 3 4 5 60Time s
minus15
minus1
minus05
0
05
1
15
2
Stat
e X
Figure 4 The state response curve of double-fault NCS
1 2 3 4 5 60Time s
minus8minus7minus6minus5minus4minus3minus2minus1
012
Con
trol i
nput
Figure 5 The control input of double-fault NCS
It keeps the minimum value from 13119904 to 17119904 while it keepsthe maximum value from 37119904 to 43119904 The sensor faults areshown as (b) which is sinusoidal It should be noted thatthe green dotted line represents the fault of sensor 1 whilethe blue solid line represents the fault of sensor 2 Throughthe state response of the double-fault NCS shown in Figure 4and corresponding control signal shown in Figure 5 we know
x1
x2
1 2 3 4 5 60Time s
minus8
minus6
minus4
minus2
0
2
4
6
Stat
e X
Figure 6 The state response curve of double-fault NCS
the 119867infin guaranteed cost controller designed in this paper isable to make the double-fault NCS asymptotically stable Thesystem gets preliminarily steady at 2119904 and its state can returnto the equilibrium position in a certain period of time whenthe NCS is affected by external disturbance Compared withthe state response of worse stability shown in Figure 6 whenthe method proposed in [28] is used for this double-faultproblem it sufficiently proves the effectiveness and feasibilityof the method proposed in this paper
To better illustrate the effectiveness of the method pro-posed in this paper the following example is presented
Example 12 Consider the parameters of system (1) as follows
119860 = [[[[[[
021 0 035 10 minus53 minus586 323
365 minus11 minus156 minus0890 0 minus158 minus285
]]]]]]
119861 = [559 12 minus089 13]119879 119862 = [17 02 015 minus018]
Mathematical Problems in Engineering 17
minus15
minus1
minus05
0
05
1
15
Stat
e X1 2 3 4 5 6 7 8 9 100
Time s
R1R2
R3R4
Figure 7 The state response curve of double-fault NCS
Δ119860 = [[[[
082 sin 119905 0 0 00 012 sin 119905 0 00 0 minus058 sin 119905 00 0 0 101 sin 119905]]]]
Δ119861 = [[[[
minus015 sin 119905008 sin 1199050minus028 sin 119905]]]]
119867 = [[[[
minus041 096 052 0006 minus057 0 021121 0 059 0minus032 minus011 minus035 minus003]]]]
119863 = 1198684times4119865 (119905) = diag (sin 119905 sin 119905 sin 119905 sin 119905)
(73)
Therefore we have
1198641 = diag (082 012 minus058 101) 1198642 = [minus015 008 0 minus028]119879 (74)
For this simulation the initial state of system is assumedas 119909(0) = [121 minus051 023 minus018]119879 and the externaldisturbance is considered as
120596 (119905) = [015 cos 119905 015 cos 119905 minus012 sin 119905 minus025 cos 119905]119879 6119904 le 119905 le 81199040 119900119905ℎ119890119903119904 (75)
The uncertain time-varying delay satisfies 0 le 120578(119905) le023119904 In addition the fault bounds of the system are givenin Table 2 Other parameters are selected as follows
1205821 = 121205822 = minus2031205823 = 1681205824 = minus231205825 = minus1051205826 = 6051205827 = 5121198781 = diag (19888 15634 8709 12876) 1198782 = 586
1205881 = 57981205882 = 1879ℓ = 1
(76)
By taking advantage of the LMI tool box and submittingthese parameters above into inequalities 10 and (68) we canobtain the 119867infin guaranteed cost control gain
119870 = 119884119883minus1198791198660minus1= [minus17256 15512 minus08571 07451]
with 120574 = radic120583 = 5819806(77)
The corresponding optimal performance indicator is 119869lowast =65021047 From the state response shown in Figure 7 andcontrol signal shown in Figure 8 we undoubtedly know
18 Mathematical Problems in Engineering
Table 2 The bounds of faults
Symbol Upper bound Lower boundActuatorfaultsΘ 150 012
SensorFaults119866
[[[[[[[[
185 0 0 00 160 0 00 0 125 00 0 0 165
]]]]]]]]
[[[[[[[[
025 0 0 00 0 0 00 0 0 00 0 0 015
]]]]]]]]
minus4
minus3
minus2
minus1
0
1
2
Con
trol i
nput
1 2 3 4 5 6 7 8 9 100Time s
Figure 8 The control input of double-fault NCS
the double-fault NCS is asymptotically stable when the 119867infinguaranteed cost controller is used This further demonstratesthe feasibility and effectiveness of the method proposed inthis paper
6 Conclusions
The issues of modelling and 119867infin guaranteed cost fault-tolerant control of double-fault networked control systemshave been addressedThe closed-loopmodel of a double-faultNCS is set up with regard to the influences of transmissiondelay packet dropout uncertain parameters and externaldisturbance In addition the piecewise delay method is pro-posed to reduce the conservatism when analysing the delay-dependent faulty system With the help of Lee Y Srsquos lemmathe sufficient condition of guaranteed cost fault-tolerantfor time-varying double-fault NCS is introduced using theLyapunov-Krasovskii theory and weighted technology Themethod of designing a guaranteed cost fault-tolerant con-troller for this NCS is given based on LMI Our next researchtask will be choosing more reasonable values of parameters120582119894 (119894 = 1 2 3 4 5 6 7) to reduce the conservatism further Ofcourse the study on scheduling policy of double-fault NCS isalso a challenge but indispensable work
Data Availability
The data used in this paper can be got by simulations
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was partly supported by National Nature Sci-ence Foundation of China under Grants 51875380 51375323and 61563022 Cooperative Innovation Fund-Prospective ofJiangsu Province under Grant BY2016044-01Major Programof Natural Science Foundation of Jiangxi Province Chinaunder Grant 20152ACB20009 High Level Talents of ldquoSix Tal-ent Peaksrdquo in Jiangsu Province China under Grant DZXX-046
References
[1] H Zhang Y Shi J Wang and H Chen ldquoA New Delay-compensation Scheme for Networked Control Systems inController Area Networksrdquo IEEE Transactions on IndustrialElectronics vol 65 no 9 pp 7239ndash7247 2018
[2] A Da Silva and C Kawan ldquoRobustness of critical bit rates forpractical stabilization of networked control systemsrdquo Automat-ica vol 93 pp 397ndash406 2018
[3] Q Zhu K Lu and Y Zhu ldquoGuaranteed cost control ofnetworked control systems under transmission control protocolwith active queue managementrdquo Asian Journal of Control vol18 no 4 pp 1546ndash1557 2016
[4] Q Zhu K Lu and Y Zhu ldquoHinfin Guaranteed Cost Control forNetworked Control Systems under Scheduling Policy Based onPredicted Errorrdquo Mathematical Problems in Engineering vol2014 Article ID 586029 12 pages 2014
[5] W H Chen J X Xu and Z H Guan ldquoGuaranteed cost controlfor uncertain Markovian jump systems with mode-dependenttime-delaysrdquo IEEE Transactions on Automatic Control vol 48no 12 pp 2270ndash2277 2003
[6] HM Soliman A DabroumM S Mahmoud andM SolimanldquoGuaranteed-cost reliable control with regional pole placementof a power systemrdquo Journal of 13e Franklin Institute vol 348no 5 pp 884ndash898 2011
[7] X Li and X-B Wu ldquoGuaranteed cost fault-tolerant controllerdesign of networked control systems under variable-periodsamplingrdquo Information Technology Journal vol 8 no 4 pp 537ndash543 2009
[8] L Zhang and G Orosz ldquoMotif-Based Design for ConnectedVehicle Systems in Presence of Heterogeneous ConnectivityStructures and Time Delaysrdquo IEEE Transactions on IntelligentTransportation Systems vol 17 no 6 pp 1638ndash1651 2016
[9] Z Li G Guo and Z Liu ldquoCommunication parameter designfor networked control systems with the slotted ALOHA accessprotocolrdquo Information Sciences vol 447 pp 205ndash215 2018
[10] K Lu G Jing and L Wang ldquoDistributed algorithm for solv-ing convex inequalitiesrdquo Institute of Electrical and ElectronicsEngineers Transactions on Automatic Control vol 63 no 8 pp2670ndash2677 2018
[11] Q Zhu K Lu and Y Zhu ldquoObserver-based feedback controlof networked control systems with delays and packet dropoutsrdquoJournal of Dynamic SystemsMeasurement andControl vol 138no 2 pp 1ndash8 2016
Mathematical Problems in Engineering 19
[12] Y Li H Li and W Sun ldquoEvent-triggered control for robust setstabilization of logical control networksrdquo Automatica vol 95pp 556ndash560 2018
[13] X Luan P Shi and F Liu ldquoStabilization of networked controlsystems with random delaysrdquo IEEE Transactions on IndustrialElectronics vol 58 no 9 pp 4323ndash4330 2011
[14] Y Zhang and J Jiang ldquoBibliographical review on reconfigurablefault-tolerant control systemsrdquo Annual Reviews in Control vol32 no 2 pp 229ndash252 2008
[15] N H Ei-Farra A Gani and P D Christofides ldquoFault-tolerantcontrol of process systems using communication networksrdquoAIChE Journal vol 51 no 6 pp 1665ndash1682 2005
[16] H R Karimi and H Gao ldquoNew delay-dependent exponentialHinfin synchronization for uncertain neural networks withmixedtime delaysrdquo IEEE Transactions on Systems Man and Cybernet-ics Part B Cybernetics vol 40 no 1 pp 173ndash185 2010
[17] Y N Guo Q Y Zhang D W Gong and J H Zhang ldquoRobustfault-tolerant control of networked control systems with time-varying delaysrdquoControl andDecision vol 23 no 6 pp 689ndash6922008
[18] Z Mao and B Jiang ldquoFault identification and fault-tolerantcontrol for a class of networked control systemsrdquo InternationalJournal of Innovative Computing Information and Control vol3 no 5 pp 1121ndash1130 2007
[19] C-X Yang Z-H Guan and J Huang ldquoStochastic fault tolerantcontrol of networked control systemsrdquo Journal of 13e FranklinInstitute vol 346 no 10 pp 1006ndash1020 2009
[20] Z Mao Y Pan B Jiang and W Chen ldquoFault Detectionfor a Class of Nonlinear Networked Control Systems withCommunication Constraintsrdquo International Journal of ControlAutomation and Systems vol 16 no 1 pp 256ndash264 2018
[21] A Qiu J Gu C Wen and J Zhang ldquoSelf-triggered faultestimation and fault tolerant control for networked controlsystemsrdquo Neurocomputing vol 272 no 1 pp 629ndash637 2018
[22] Q Zhu K Lu G Xie and Y Zhu ldquoGuaranteed Cost Fault-Tolerant Control for Networked Control Systems with SensorFaultsrdquoMathematical Problems in Engineering vol 2015 ArticleID 549347 9 pages 2015
[23] W Wu and Y Zhang ldquoEvent-triggered fault-tolerant controland scheduling codesign for nonlinear networked control sys-tems with medium-access constraint and packet disorderingrdquoInternational Journal of Robust and Nonlinear Control vol 28no 4 pp 1182ndash1198 2018
[24] X Xiao and X-J Li ldquoAdaptive dynamic programming method-based synchronisation control of a class of complex dynamicalnetworks with unknown dynamics and actuator faultsrdquo IETControl 13eory amp Applications vol 12 no 2 pp 291ndash298 2018
[25] PMhaskar AGani CMcFall PDChristofides and J FDavisldquoFault-tolerant control of nonlinear process systems subject tosensor faultsrdquo AIChE Journal vol 53 no 3 pp 654ndash668 2007
[26] M Liu P Shi L Zhang and X Zhao ldquoFault-tolerant controlfor nonlinear Markovian jump systems via proportional andderivative sliding mode observer techniquerdquo IEEE Transactionson Circuits and Systems I Regular Papers vol 58 no 11 pp2755ndash2764 2011
[27] S Li D Sauter C Aubrun and J Yame ldquoStability guaranteedactive fault-tolerant control of networked control systemsrdquoJournal of Control Science and Engineering vol 2008 Article ID189064 9 pages 2008
[28] X Y Luo M J Shang C L Chen and X P Guan ldquoGuaranteedcost active fault-tolerant control of networked control system
with packet dropout and transmission delayrdquo InternationalJournal of Automation and Computing vol 7 no 4 pp 509ndash5152010
[29] Q Zhu B Xie and Y Zhu ldquoGuaranteed Cost Control forMultirate Networked Control Systems with Both Time-Delayand Packet-Dropoutrdquo Mathematical Problems in Engineeringvol 2014 Article ID 637329 9 pages 2014
[30] R Manivannan R Samidurai J Cao and M Perc ldquoDesign ofResilient Reliable Dissipativity Control for Systems with Actu-ator Faults and Probabilistic Time-Delay Signals via Sampled-Data Approachrdquo IEEE Transactions on Systems Man andCybernetics Systems 2018
[31] R Manivannan R Samidurai J Cao A Alsaedi and F EAlsaadi ldquoNon-Fragile Extended Dissipativity Control Designfor Generalized Neural Networks with Interval Time-DelaySignalsrdquo Asian Journal of Control 2019
[32] Q Gao and N Olgac ldquoBounds of imaginary spectra of LTIsystems in the domain of two of the multiple time delaysrdquoAutomatica vol 72 pp 235ndash241 2016
[33] Q Gao A S Kammer U Zalluhoglu and N Olgac ldquoCriticaleffects of the polarity change in delayed states within anLTI dynamics with multiple delaysrdquo Institute of Electrical andElectronics Engineers Transactions onAutomatic Control vol 60no 11 pp 3018ndash3022 2015
[34] Q Gao Z Zhang and C Yang ldquoSign inverting control andits important properties for multiple time-delayed systemsrdquo inProceedings of the 10th ASME Dynamic Systems and ControlConference pp 979ndash984 Virginia USA 2017
[35] Y M Zhang and J Jiang ldquoActive fault-tolerant control systemagainst partial actuator failuresrdquo IEE Proceedings Control13eoryand Applications vol 149 no 1 pp 95ndash104 2002
[36] G Garcia J Bernussou andD Arzelier ldquoRobust stabilization ofdiscrete-time linear systems with norm-bounded time-varyinguncertaintyrdquo Systems amp Control Letters vol 22 no 5 pp 327ndash339 1994
[37] Y Wang L Xie and C E de Souza ldquoRobust control of a classof uncertain nonlinear systemsrdquo Systems amp Control Letters vol19 no 2 pp 139ndash149 1992
[38] D Yue E Tian and Y Zhang ldquoA piecewise analysis methodto stability analysis of linear continuousdiscrete systems withtime-varying delayrdquo International Journal of Robust and Non-linear Control vol 19 no 13 pp 1493ndash1518 2009
[39] X-J Jing D-L Tan and Y-C Wang ldquoAn LMI approach tostability of systems with severe time-delayrdquo IEEE Transactionson Automatic Control vol 49 no 7 pp 1192ndash1195 2004
[40] D Yue Q-L Han and J Lam ldquoNetwork-based robust Hinfincontrol of systems with uncertaintyrdquo Automatica vol 41 no 6pp 999ndash1007 2005
[41] Z Wang F Yang D W C Ho and X Liu ldquoRobust Hinfincontrol for networked systemswith randompacket lossesrdquo IEEETransactions on Systems Man and Cybernetics Part B vol 37no 4 pp 916ndash924 2007
[42] M S Mahmoud ldquoControl of uncertain state-delay systemsguaranteed cost approachrdquo IMA Journal of Mathematical Con-trol and Information vol 18 no 1 pp 109ndash128 2001
[43] D Yue C Peng andG Y Tang ldquoGuaranteed cost control of lin-ear systems over networks with state and input quantisationsrdquoIEE Proceedings Control 13eory and Applications vol 153 no 6pp 658ndash664 2006
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

16 Mathematical Problems in Engineering
002040608
1121416
Actu
ator
faul
t
1 2 3 4 5 60Time s
(a) Time-varying actuator fault
minus020
02040608
112141618
Sens
or fa
ult
1 2 3 4 5 60Time s
(b) Time-varying sensor fault
Figure 3 The time-varying faults
x1
x2
1 2 3 4 5 60Time s
minus15
minus1
minus05
0
05
1
15
2
Stat
e X
Figure 4 The state response curve of double-fault NCS
1 2 3 4 5 60Time s
minus8minus7minus6minus5minus4minus3minus2minus1
012
Con
trol i
nput
Figure 5 The control input of double-fault NCS
It keeps the minimum value from 13119904 to 17119904 while it keepsthe maximum value from 37119904 to 43119904 The sensor faults areshown as (b) which is sinusoidal It should be noted thatthe green dotted line represents the fault of sensor 1 whilethe blue solid line represents the fault of sensor 2 Throughthe state response of the double-fault NCS shown in Figure 4and corresponding control signal shown in Figure 5 we know
x1
x2
1 2 3 4 5 60Time s
minus8
minus6
minus4
minus2
0
2
4
6
Stat
e X
Figure 6 The state response curve of double-fault NCS
the 119867infin guaranteed cost controller designed in this paper isable to make the double-fault NCS asymptotically stable Thesystem gets preliminarily steady at 2119904 and its state can returnto the equilibrium position in a certain period of time whenthe NCS is affected by external disturbance Compared withthe state response of worse stability shown in Figure 6 whenthe method proposed in [28] is used for this double-faultproblem it sufficiently proves the effectiveness and feasibilityof the method proposed in this paper
To better illustrate the effectiveness of the method pro-posed in this paper the following example is presented
Example 12 Consider the parameters of system (1) as follows
119860 = [[[[[[
021 0 035 10 minus53 minus586 323
365 minus11 minus156 minus0890 0 minus158 minus285
]]]]]]
119861 = [559 12 minus089 13]119879 119862 = [17 02 015 minus018]
Mathematical Problems in Engineering 17
minus15
minus1
minus05
0
05
1
15
Stat
e X1 2 3 4 5 6 7 8 9 100
Time s
R1R2
R3R4
Figure 7 The state response curve of double-fault NCS
Δ119860 = [[[[
082 sin 119905 0 0 00 012 sin 119905 0 00 0 minus058 sin 119905 00 0 0 101 sin 119905]]]]
Δ119861 = [[[[
minus015 sin 119905008 sin 1199050minus028 sin 119905]]]]
119867 = [[[[
minus041 096 052 0006 minus057 0 021121 0 059 0minus032 minus011 minus035 minus003]]]]
119863 = 1198684times4119865 (119905) = diag (sin 119905 sin 119905 sin 119905 sin 119905)
(73)
Therefore we have
1198641 = diag (082 012 minus058 101) 1198642 = [minus015 008 0 minus028]119879 (74)
For this simulation the initial state of system is assumedas 119909(0) = [121 minus051 023 minus018]119879 and the externaldisturbance is considered as
120596 (119905) = [015 cos 119905 015 cos 119905 minus012 sin 119905 minus025 cos 119905]119879 6119904 le 119905 le 81199040 119900119905ℎ119890119903119904 (75)
The uncertain time-varying delay satisfies 0 le 120578(119905) le023119904 In addition the fault bounds of the system are givenin Table 2 Other parameters are selected as follows
1205821 = 121205822 = minus2031205823 = 1681205824 = minus231205825 = minus1051205826 = 6051205827 = 5121198781 = diag (19888 15634 8709 12876) 1198782 = 586
1205881 = 57981205882 = 1879ℓ = 1
(76)
By taking advantage of the LMI tool box and submittingthese parameters above into inequalities 10 and (68) we canobtain the 119867infin guaranteed cost control gain
119870 = 119884119883minus1198791198660minus1= [minus17256 15512 minus08571 07451]
with 120574 = radic120583 = 5819806(77)
The corresponding optimal performance indicator is 119869lowast =65021047 From the state response shown in Figure 7 andcontrol signal shown in Figure 8 we undoubtedly know
18 Mathematical Problems in Engineering
Table 2 The bounds of faults
Symbol Upper bound Lower boundActuatorfaultsΘ 150 012
SensorFaults119866
[[[[[[[[
185 0 0 00 160 0 00 0 125 00 0 0 165
]]]]]]]]
[[[[[[[[
025 0 0 00 0 0 00 0 0 00 0 0 015
]]]]]]]]
minus4
minus3
minus2
minus1
0
1
2
Con
trol i
nput
1 2 3 4 5 6 7 8 9 100Time s
Figure 8 The control input of double-fault NCS
the double-fault NCS is asymptotically stable when the 119867infinguaranteed cost controller is used This further demonstratesthe feasibility and effectiveness of the method proposed inthis paper
6 Conclusions
The issues of modelling and 119867infin guaranteed cost fault-tolerant control of double-fault networked control systemshave been addressedThe closed-loopmodel of a double-faultNCS is set up with regard to the influences of transmissiondelay packet dropout uncertain parameters and externaldisturbance In addition the piecewise delay method is pro-posed to reduce the conservatism when analysing the delay-dependent faulty system With the help of Lee Y Srsquos lemmathe sufficient condition of guaranteed cost fault-tolerantfor time-varying double-fault NCS is introduced using theLyapunov-Krasovskii theory and weighted technology Themethod of designing a guaranteed cost fault-tolerant con-troller for this NCS is given based on LMI Our next researchtask will be choosing more reasonable values of parameters120582119894 (119894 = 1 2 3 4 5 6 7) to reduce the conservatism further Ofcourse the study on scheduling policy of double-fault NCS isalso a challenge but indispensable work
Data Availability
The data used in this paper can be got by simulations
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was partly supported by National Nature Sci-ence Foundation of China under Grants 51875380 51375323and 61563022 Cooperative Innovation Fund-Prospective ofJiangsu Province under Grant BY2016044-01Major Programof Natural Science Foundation of Jiangxi Province Chinaunder Grant 20152ACB20009 High Level Talents of ldquoSix Tal-ent Peaksrdquo in Jiangsu Province China under Grant DZXX-046
References
[1] H Zhang Y Shi J Wang and H Chen ldquoA New Delay-compensation Scheme for Networked Control Systems inController Area Networksrdquo IEEE Transactions on IndustrialElectronics vol 65 no 9 pp 7239ndash7247 2018
[2] A Da Silva and C Kawan ldquoRobustness of critical bit rates forpractical stabilization of networked control systemsrdquo Automat-ica vol 93 pp 397ndash406 2018
[3] Q Zhu K Lu and Y Zhu ldquoGuaranteed cost control ofnetworked control systems under transmission control protocolwith active queue managementrdquo Asian Journal of Control vol18 no 4 pp 1546ndash1557 2016
[4] Q Zhu K Lu and Y Zhu ldquoHinfin Guaranteed Cost Control forNetworked Control Systems under Scheduling Policy Based onPredicted Errorrdquo Mathematical Problems in Engineering vol2014 Article ID 586029 12 pages 2014
[5] W H Chen J X Xu and Z H Guan ldquoGuaranteed cost controlfor uncertain Markovian jump systems with mode-dependenttime-delaysrdquo IEEE Transactions on Automatic Control vol 48no 12 pp 2270ndash2277 2003
[6] HM Soliman A DabroumM S Mahmoud andM SolimanldquoGuaranteed-cost reliable control with regional pole placementof a power systemrdquo Journal of 13e Franklin Institute vol 348no 5 pp 884ndash898 2011
[7] X Li and X-B Wu ldquoGuaranteed cost fault-tolerant controllerdesign of networked control systems under variable-periodsamplingrdquo Information Technology Journal vol 8 no 4 pp 537ndash543 2009
[8] L Zhang and G Orosz ldquoMotif-Based Design for ConnectedVehicle Systems in Presence of Heterogeneous ConnectivityStructures and Time Delaysrdquo IEEE Transactions on IntelligentTransportation Systems vol 17 no 6 pp 1638ndash1651 2016
[9] Z Li G Guo and Z Liu ldquoCommunication parameter designfor networked control systems with the slotted ALOHA accessprotocolrdquo Information Sciences vol 447 pp 205ndash215 2018
[10] K Lu G Jing and L Wang ldquoDistributed algorithm for solv-ing convex inequalitiesrdquo Institute of Electrical and ElectronicsEngineers Transactions on Automatic Control vol 63 no 8 pp2670ndash2677 2018
[11] Q Zhu K Lu and Y Zhu ldquoObserver-based feedback controlof networked control systems with delays and packet dropoutsrdquoJournal of Dynamic SystemsMeasurement andControl vol 138no 2 pp 1ndash8 2016
Mathematical Problems in Engineering 19
[12] Y Li H Li and W Sun ldquoEvent-triggered control for robust setstabilization of logical control networksrdquo Automatica vol 95pp 556ndash560 2018
[13] X Luan P Shi and F Liu ldquoStabilization of networked controlsystems with random delaysrdquo IEEE Transactions on IndustrialElectronics vol 58 no 9 pp 4323ndash4330 2011
[14] Y Zhang and J Jiang ldquoBibliographical review on reconfigurablefault-tolerant control systemsrdquo Annual Reviews in Control vol32 no 2 pp 229ndash252 2008
[15] N H Ei-Farra A Gani and P D Christofides ldquoFault-tolerantcontrol of process systems using communication networksrdquoAIChE Journal vol 51 no 6 pp 1665ndash1682 2005
[16] H R Karimi and H Gao ldquoNew delay-dependent exponentialHinfin synchronization for uncertain neural networks withmixedtime delaysrdquo IEEE Transactions on Systems Man and Cybernet-ics Part B Cybernetics vol 40 no 1 pp 173ndash185 2010
[17] Y N Guo Q Y Zhang D W Gong and J H Zhang ldquoRobustfault-tolerant control of networked control systems with time-varying delaysrdquoControl andDecision vol 23 no 6 pp 689ndash6922008
[18] Z Mao and B Jiang ldquoFault identification and fault-tolerantcontrol for a class of networked control systemsrdquo InternationalJournal of Innovative Computing Information and Control vol3 no 5 pp 1121ndash1130 2007
[19] C-X Yang Z-H Guan and J Huang ldquoStochastic fault tolerantcontrol of networked control systemsrdquo Journal of 13e FranklinInstitute vol 346 no 10 pp 1006ndash1020 2009
[20] Z Mao Y Pan B Jiang and W Chen ldquoFault Detectionfor a Class of Nonlinear Networked Control Systems withCommunication Constraintsrdquo International Journal of ControlAutomation and Systems vol 16 no 1 pp 256ndash264 2018
[21] A Qiu J Gu C Wen and J Zhang ldquoSelf-triggered faultestimation and fault tolerant control for networked controlsystemsrdquo Neurocomputing vol 272 no 1 pp 629ndash637 2018
[22] Q Zhu K Lu G Xie and Y Zhu ldquoGuaranteed Cost Fault-Tolerant Control for Networked Control Systems with SensorFaultsrdquoMathematical Problems in Engineering vol 2015 ArticleID 549347 9 pages 2015
[23] W Wu and Y Zhang ldquoEvent-triggered fault-tolerant controland scheduling codesign for nonlinear networked control sys-tems with medium-access constraint and packet disorderingrdquoInternational Journal of Robust and Nonlinear Control vol 28no 4 pp 1182ndash1198 2018
[24] X Xiao and X-J Li ldquoAdaptive dynamic programming method-based synchronisation control of a class of complex dynamicalnetworks with unknown dynamics and actuator faultsrdquo IETControl 13eory amp Applications vol 12 no 2 pp 291ndash298 2018
[25] PMhaskar AGani CMcFall PDChristofides and J FDavisldquoFault-tolerant control of nonlinear process systems subject tosensor faultsrdquo AIChE Journal vol 53 no 3 pp 654ndash668 2007
[26] M Liu P Shi L Zhang and X Zhao ldquoFault-tolerant controlfor nonlinear Markovian jump systems via proportional andderivative sliding mode observer techniquerdquo IEEE Transactionson Circuits and Systems I Regular Papers vol 58 no 11 pp2755ndash2764 2011
[27] S Li D Sauter C Aubrun and J Yame ldquoStability guaranteedactive fault-tolerant control of networked control systemsrdquoJournal of Control Science and Engineering vol 2008 Article ID189064 9 pages 2008
[28] X Y Luo M J Shang C L Chen and X P Guan ldquoGuaranteedcost active fault-tolerant control of networked control system
with packet dropout and transmission delayrdquo InternationalJournal of Automation and Computing vol 7 no 4 pp 509ndash5152010
[29] Q Zhu B Xie and Y Zhu ldquoGuaranteed Cost Control forMultirate Networked Control Systems with Both Time-Delayand Packet-Dropoutrdquo Mathematical Problems in Engineeringvol 2014 Article ID 637329 9 pages 2014
[30] R Manivannan R Samidurai J Cao and M Perc ldquoDesign ofResilient Reliable Dissipativity Control for Systems with Actu-ator Faults and Probabilistic Time-Delay Signals via Sampled-Data Approachrdquo IEEE Transactions on Systems Man andCybernetics Systems 2018
[31] R Manivannan R Samidurai J Cao A Alsaedi and F EAlsaadi ldquoNon-Fragile Extended Dissipativity Control Designfor Generalized Neural Networks with Interval Time-DelaySignalsrdquo Asian Journal of Control 2019
[32] Q Gao and N Olgac ldquoBounds of imaginary spectra of LTIsystems in the domain of two of the multiple time delaysrdquoAutomatica vol 72 pp 235ndash241 2016
[33] Q Gao A S Kammer U Zalluhoglu and N Olgac ldquoCriticaleffects of the polarity change in delayed states within anLTI dynamics with multiple delaysrdquo Institute of Electrical andElectronics Engineers Transactions onAutomatic Control vol 60no 11 pp 3018ndash3022 2015
[34] Q Gao Z Zhang and C Yang ldquoSign inverting control andits important properties for multiple time-delayed systemsrdquo inProceedings of the 10th ASME Dynamic Systems and ControlConference pp 979ndash984 Virginia USA 2017
[35] Y M Zhang and J Jiang ldquoActive fault-tolerant control systemagainst partial actuator failuresrdquo IEE Proceedings Control13eoryand Applications vol 149 no 1 pp 95ndash104 2002
[36] G Garcia J Bernussou andD Arzelier ldquoRobust stabilization ofdiscrete-time linear systems with norm-bounded time-varyinguncertaintyrdquo Systems amp Control Letters vol 22 no 5 pp 327ndash339 1994
[37] Y Wang L Xie and C E de Souza ldquoRobust control of a classof uncertain nonlinear systemsrdquo Systems amp Control Letters vol19 no 2 pp 139ndash149 1992
[38] D Yue E Tian and Y Zhang ldquoA piecewise analysis methodto stability analysis of linear continuousdiscrete systems withtime-varying delayrdquo International Journal of Robust and Non-linear Control vol 19 no 13 pp 1493ndash1518 2009
[39] X-J Jing D-L Tan and Y-C Wang ldquoAn LMI approach tostability of systems with severe time-delayrdquo IEEE Transactionson Automatic Control vol 49 no 7 pp 1192ndash1195 2004
[40] D Yue Q-L Han and J Lam ldquoNetwork-based robust Hinfincontrol of systems with uncertaintyrdquo Automatica vol 41 no 6pp 999ndash1007 2005
[41] Z Wang F Yang D W C Ho and X Liu ldquoRobust Hinfincontrol for networked systemswith randompacket lossesrdquo IEEETransactions on Systems Man and Cybernetics Part B vol 37no 4 pp 916ndash924 2007
[42] M S Mahmoud ldquoControl of uncertain state-delay systemsguaranteed cost approachrdquo IMA Journal of Mathematical Con-trol and Information vol 18 no 1 pp 109ndash128 2001
[43] D Yue C Peng andG Y Tang ldquoGuaranteed cost control of lin-ear systems over networks with state and input quantisationsrdquoIEE Proceedings Control 13eory and Applications vol 153 no 6pp 658ndash664 2006
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Mathematical Problems in Engineering 17
minus15
minus1
minus05
0
05
1
15
Stat
e X1 2 3 4 5 6 7 8 9 100
Time s
R1R2
R3R4
Figure 7 The state response curve of double-fault NCS
Δ119860 = [[[[
082 sin 119905 0 0 00 012 sin 119905 0 00 0 minus058 sin 119905 00 0 0 101 sin 119905]]]]
Δ119861 = [[[[
minus015 sin 119905008 sin 1199050minus028 sin 119905]]]]
119867 = [[[[
minus041 096 052 0006 minus057 0 021121 0 059 0minus032 minus011 minus035 minus003]]]]
119863 = 1198684times4119865 (119905) = diag (sin 119905 sin 119905 sin 119905 sin 119905)
(73)
Therefore we have
1198641 = diag (082 012 minus058 101) 1198642 = [minus015 008 0 minus028]119879 (74)
For this simulation the initial state of system is assumedas 119909(0) = [121 minus051 023 minus018]119879 and the externaldisturbance is considered as
120596 (119905) = [015 cos 119905 015 cos 119905 minus012 sin 119905 minus025 cos 119905]119879 6119904 le 119905 le 81199040 119900119905ℎ119890119903119904 (75)
The uncertain time-varying delay satisfies 0 le 120578(119905) le023119904 In addition the fault bounds of the system are givenin Table 2 Other parameters are selected as follows
1205821 = 121205822 = minus2031205823 = 1681205824 = minus231205825 = minus1051205826 = 6051205827 = 5121198781 = diag (19888 15634 8709 12876) 1198782 = 586
1205881 = 57981205882 = 1879ℓ = 1
(76)
By taking advantage of the LMI tool box and submittingthese parameters above into inequalities 10 and (68) we canobtain the 119867infin guaranteed cost control gain
119870 = 119884119883minus1198791198660minus1= [minus17256 15512 minus08571 07451]
with 120574 = radic120583 = 5819806(77)
The corresponding optimal performance indicator is 119869lowast =65021047 From the state response shown in Figure 7 andcontrol signal shown in Figure 8 we undoubtedly know
18 Mathematical Problems in Engineering
Table 2 The bounds of faults
Symbol Upper bound Lower boundActuatorfaultsΘ 150 012
SensorFaults119866
[[[[[[[[
185 0 0 00 160 0 00 0 125 00 0 0 165
]]]]]]]]
[[[[[[[[
025 0 0 00 0 0 00 0 0 00 0 0 015
]]]]]]]]
minus4
minus3
minus2
minus1
0
1
2
Con
trol i
nput
1 2 3 4 5 6 7 8 9 100Time s
Figure 8 The control input of double-fault NCS
the double-fault NCS is asymptotically stable when the 119867infinguaranteed cost controller is used This further demonstratesthe feasibility and effectiveness of the method proposed inthis paper
6 Conclusions
The issues of modelling and 119867infin guaranteed cost fault-tolerant control of double-fault networked control systemshave been addressedThe closed-loopmodel of a double-faultNCS is set up with regard to the influences of transmissiondelay packet dropout uncertain parameters and externaldisturbance In addition the piecewise delay method is pro-posed to reduce the conservatism when analysing the delay-dependent faulty system With the help of Lee Y Srsquos lemmathe sufficient condition of guaranteed cost fault-tolerantfor time-varying double-fault NCS is introduced using theLyapunov-Krasovskii theory and weighted technology Themethod of designing a guaranteed cost fault-tolerant con-troller for this NCS is given based on LMI Our next researchtask will be choosing more reasonable values of parameters120582119894 (119894 = 1 2 3 4 5 6 7) to reduce the conservatism further Ofcourse the study on scheduling policy of double-fault NCS isalso a challenge but indispensable work
Data Availability
The data used in this paper can be got by simulations
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was partly supported by National Nature Sci-ence Foundation of China under Grants 51875380 51375323and 61563022 Cooperative Innovation Fund-Prospective ofJiangsu Province under Grant BY2016044-01Major Programof Natural Science Foundation of Jiangxi Province Chinaunder Grant 20152ACB20009 High Level Talents of ldquoSix Tal-ent Peaksrdquo in Jiangsu Province China under Grant DZXX-046
References
[1] H Zhang Y Shi J Wang and H Chen ldquoA New Delay-compensation Scheme for Networked Control Systems inController Area Networksrdquo IEEE Transactions on IndustrialElectronics vol 65 no 9 pp 7239ndash7247 2018
[2] A Da Silva and C Kawan ldquoRobustness of critical bit rates forpractical stabilization of networked control systemsrdquo Automat-ica vol 93 pp 397ndash406 2018
[3] Q Zhu K Lu and Y Zhu ldquoGuaranteed cost control ofnetworked control systems under transmission control protocolwith active queue managementrdquo Asian Journal of Control vol18 no 4 pp 1546ndash1557 2016
[4] Q Zhu K Lu and Y Zhu ldquoHinfin Guaranteed Cost Control forNetworked Control Systems under Scheduling Policy Based onPredicted Errorrdquo Mathematical Problems in Engineering vol2014 Article ID 586029 12 pages 2014
[5] W H Chen J X Xu and Z H Guan ldquoGuaranteed cost controlfor uncertain Markovian jump systems with mode-dependenttime-delaysrdquo IEEE Transactions on Automatic Control vol 48no 12 pp 2270ndash2277 2003
[6] HM Soliman A DabroumM S Mahmoud andM SolimanldquoGuaranteed-cost reliable control with regional pole placementof a power systemrdquo Journal of 13e Franklin Institute vol 348no 5 pp 884ndash898 2011
[7] X Li and X-B Wu ldquoGuaranteed cost fault-tolerant controllerdesign of networked control systems under variable-periodsamplingrdquo Information Technology Journal vol 8 no 4 pp 537ndash543 2009
[8] L Zhang and G Orosz ldquoMotif-Based Design for ConnectedVehicle Systems in Presence of Heterogeneous ConnectivityStructures and Time Delaysrdquo IEEE Transactions on IntelligentTransportation Systems vol 17 no 6 pp 1638ndash1651 2016
[9] Z Li G Guo and Z Liu ldquoCommunication parameter designfor networked control systems with the slotted ALOHA accessprotocolrdquo Information Sciences vol 447 pp 205ndash215 2018
[10] K Lu G Jing and L Wang ldquoDistributed algorithm for solv-ing convex inequalitiesrdquo Institute of Electrical and ElectronicsEngineers Transactions on Automatic Control vol 63 no 8 pp2670ndash2677 2018
[11] Q Zhu K Lu and Y Zhu ldquoObserver-based feedback controlof networked control systems with delays and packet dropoutsrdquoJournal of Dynamic SystemsMeasurement andControl vol 138no 2 pp 1ndash8 2016
Mathematical Problems in Engineering 19
[12] Y Li H Li and W Sun ldquoEvent-triggered control for robust setstabilization of logical control networksrdquo Automatica vol 95pp 556ndash560 2018
[13] X Luan P Shi and F Liu ldquoStabilization of networked controlsystems with random delaysrdquo IEEE Transactions on IndustrialElectronics vol 58 no 9 pp 4323ndash4330 2011
[14] Y Zhang and J Jiang ldquoBibliographical review on reconfigurablefault-tolerant control systemsrdquo Annual Reviews in Control vol32 no 2 pp 229ndash252 2008
[15] N H Ei-Farra A Gani and P D Christofides ldquoFault-tolerantcontrol of process systems using communication networksrdquoAIChE Journal vol 51 no 6 pp 1665ndash1682 2005
[16] H R Karimi and H Gao ldquoNew delay-dependent exponentialHinfin synchronization for uncertain neural networks withmixedtime delaysrdquo IEEE Transactions on Systems Man and Cybernet-ics Part B Cybernetics vol 40 no 1 pp 173ndash185 2010
[17] Y N Guo Q Y Zhang D W Gong and J H Zhang ldquoRobustfault-tolerant control of networked control systems with time-varying delaysrdquoControl andDecision vol 23 no 6 pp 689ndash6922008
[18] Z Mao and B Jiang ldquoFault identification and fault-tolerantcontrol for a class of networked control systemsrdquo InternationalJournal of Innovative Computing Information and Control vol3 no 5 pp 1121ndash1130 2007
[19] C-X Yang Z-H Guan and J Huang ldquoStochastic fault tolerantcontrol of networked control systemsrdquo Journal of 13e FranklinInstitute vol 346 no 10 pp 1006ndash1020 2009
[20] Z Mao Y Pan B Jiang and W Chen ldquoFault Detectionfor a Class of Nonlinear Networked Control Systems withCommunication Constraintsrdquo International Journal of ControlAutomation and Systems vol 16 no 1 pp 256ndash264 2018
[21] A Qiu J Gu C Wen and J Zhang ldquoSelf-triggered faultestimation and fault tolerant control for networked controlsystemsrdquo Neurocomputing vol 272 no 1 pp 629ndash637 2018
[22] Q Zhu K Lu G Xie and Y Zhu ldquoGuaranteed Cost Fault-Tolerant Control for Networked Control Systems with SensorFaultsrdquoMathematical Problems in Engineering vol 2015 ArticleID 549347 9 pages 2015
[23] W Wu and Y Zhang ldquoEvent-triggered fault-tolerant controland scheduling codesign for nonlinear networked control sys-tems with medium-access constraint and packet disorderingrdquoInternational Journal of Robust and Nonlinear Control vol 28no 4 pp 1182ndash1198 2018
[24] X Xiao and X-J Li ldquoAdaptive dynamic programming method-based synchronisation control of a class of complex dynamicalnetworks with unknown dynamics and actuator faultsrdquo IETControl 13eory amp Applications vol 12 no 2 pp 291ndash298 2018
[25] PMhaskar AGani CMcFall PDChristofides and J FDavisldquoFault-tolerant control of nonlinear process systems subject tosensor faultsrdquo AIChE Journal vol 53 no 3 pp 654ndash668 2007
[26] M Liu P Shi L Zhang and X Zhao ldquoFault-tolerant controlfor nonlinear Markovian jump systems via proportional andderivative sliding mode observer techniquerdquo IEEE Transactionson Circuits and Systems I Regular Papers vol 58 no 11 pp2755ndash2764 2011
[27] S Li D Sauter C Aubrun and J Yame ldquoStability guaranteedactive fault-tolerant control of networked control systemsrdquoJournal of Control Science and Engineering vol 2008 Article ID189064 9 pages 2008
[28] X Y Luo M J Shang C L Chen and X P Guan ldquoGuaranteedcost active fault-tolerant control of networked control system
with packet dropout and transmission delayrdquo InternationalJournal of Automation and Computing vol 7 no 4 pp 509ndash5152010
[29] Q Zhu B Xie and Y Zhu ldquoGuaranteed Cost Control forMultirate Networked Control Systems with Both Time-Delayand Packet-Dropoutrdquo Mathematical Problems in Engineeringvol 2014 Article ID 637329 9 pages 2014
[30] R Manivannan R Samidurai J Cao and M Perc ldquoDesign ofResilient Reliable Dissipativity Control for Systems with Actu-ator Faults and Probabilistic Time-Delay Signals via Sampled-Data Approachrdquo IEEE Transactions on Systems Man andCybernetics Systems 2018
[31] R Manivannan R Samidurai J Cao A Alsaedi and F EAlsaadi ldquoNon-Fragile Extended Dissipativity Control Designfor Generalized Neural Networks with Interval Time-DelaySignalsrdquo Asian Journal of Control 2019
[32] Q Gao and N Olgac ldquoBounds of imaginary spectra of LTIsystems in the domain of two of the multiple time delaysrdquoAutomatica vol 72 pp 235ndash241 2016
[33] Q Gao A S Kammer U Zalluhoglu and N Olgac ldquoCriticaleffects of the polarity change in delayed states within anLTI dynamics with multiple delaysrdquo Institute of Electrical andElectronics Engineers Transactions onAutomatic Control vol 60no 11 pp 3018ndash3022 2015
[34] Q Gao Z Zhang and C Yang ldquoSign inverting control andits important properties for multiple time-delayed systemsrdquo inProceedings of the 10th ASME Dynamic Systems and ControlConference pp 979ndash984 Virginia USA 2017
[35] Y M Zhang and J Jiang ldquoActive fault-tolerant control systemagainst partial actuator failuresrdquo IEE Proceedings Control13eoryand Applications vol 149 no 1 pp 95ndash104 2002
[36] G Garcia J Bernussou andD Arzelier ldquoRobust stabilization ofdiscrete-time linear systems with norm-bounded time-varyinguncertaintyrdquo Systems amp Control Letters vol 22 no 5 pp 327ndash339 1994
[37] Y Wang L Xie and C E de Souza ldquoRobust control of a classof uncertain nonlinear systemsrdquo Systems amp Control Letters vol19 no 2 pp 139ndash149 1992
[38] D Yue E Tian and Y Zhang ldquoA piecewise analysis methodto stability analysis of linear continuousdiscrete systems withtime-varying delayrdquo International Journal of Robust and Non-linear Control vol 19 no 13 pp 1493ndash1518 2009
[39] X-J Jing D-L Tan and Y-C Wang ldquoAn LMI approach tostability of systems with severe time-delayrdquo IEEE Transactionson Automatic Control vol 49 no 7 pp 1192ndash1195 2004
[40] D Yue Q-L Han and J Lam ldquoNetwork-based robust Hinfincontrol of systems with uncertaintyrdquo Automatica vol 41 no 6pp 999ndash1007 2005
[41] Z Wang F Yang D W C Ho and X Liu ldquoRobust Hinfincontrol for networked systemswith randompacket lossesrdquo IEEETransactions on Systems Man and Cybernetics Part B vol 37no 4 pp 916ndash924 2007
[42] M S Mahmoud ldquoControl of uncertain state-delay systemsguaranteed cost approachrdquo IMA Journal of Mathematical Con-trol and Information vol 18 no 1 pp 109ndash128 2001
[43] D Yue C Peng andG Y Tang ldquoGuaranteed cost control of lin-ear systems over networks with state and input quantisationsrdquoIEE Proceedings Control 13eory and Applications vol 153 no 6pp 658ndash664 2006
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

18 Mathematical Problems in Engineering
Table 2 The bounds of faults
Symbol Upper bound Lower boundActuatorfaultsΘ 150 012
SensorFaults119866
[[[[[[[[
185 0 0 00 160 0 00 0 125 00 0 0 165
]]]]]]]]
[[[[[[[[
025 0 0 00 0 0 00 0 0 00 0 0 015
]]]]]]]]
minus4
minus3
minus2
minus1
0
1
2
Con
trol i
nput
1 2 3 4 5 6 7 8 9 100Time s
Figure 8 The control input of double-fault NCS
the double-fault NCS is asymptotically stable when the 119867infinguaranteed cost controller is used This further demonstratesthe feasibility and effectiveness of the method proposed inthis paper
6 Conclusions
The issues of modelling and 119867infin guaranteed cost fault-tolerant control of double-fault networked control systemshave been addressedThe closed-loopmodel of a double-faultNCS is set up with regard to the influences of transmissiondelay packet dropout uncertain parameters and externaldisturbance In addition the piecewise delay method is pro-posed to reduce the conservatism when analysing the delay-dependent faulty system With the help of Lee Y Srsquos lemmathe sufficient condition of guaranteed cost fault-tolerantfor time-varying double-fault NCS is introduced using theLyapunov-Krasovskii theory and weighted technology Themethod of designing a guaranteed cost fault-tolerant con-troller for this NCS is given based on LMI Our next researchtask will be choosing more reasonable values of parameters120582119894 (119894 = 1 2 3 4 5 6 7) to reduce the conservatism further Ofcourse the study on scheduling policy of double-fault NCS isalso a challenge but indispensable work
Data Availability
The data used in this paper can be got by simulations
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was partly supported by National Nature Sci-ence Foundation of China under Grants 51875380 51375323and 61563022 Cooperative Innovation Fund-Prospective ofJiangsu Province under Grant BY2016044-01Major Programof Natural Science Foundation of Jiangxi Province Chinaunder Grant 20152ACB20009 High Level Talents of ldquoSix Tal-ent Peaksrdquo in Jiangsu Province China under Grant DZXX-046
References
[1] H Zhang Y Shi J Wang and H Chen ldquoA New Delay-compensation Scheme for Networked Control Systems inController Area Networksrdquo IEEE Transactions on IndustrialElectronics vol 65 no 9 pp 7239ndash7247 2018
[2] A Da Silva and C Kawan ldquoRobustness of critical bit rates forpractical stabilization of networked control systemsrdquo Automat-ica vol 93 pp 397ndash406 2018
[3] Q Zhu K Lu and Y Zhu ldquoGuaranteed cost control ofnetworked control systems under transmission control protocolwith active queue managementrdquo Asian Journal of Control vol18 no 4 pp 1546ndash1557 2016
[4] Q Zhu K Lu and Y Zhu ldquoHinfin Guaranteed Cost Control forNetworked Control Systems under Scheduling Policy Based onPredicted Errorrdquo Mathematical Problems in Engineering vol2014 Article ID 586029 12 pages 2014
[5] W H Chen J X Xu and Z H Guan ldquoGuaranteed cost controlfor uncertain Markovian jump systems with mode-dependenttime-delaysrdquo IEEE Transactions on Automatic Control vol 48no 12 pp 2270ndash2277 2003
[6] HM Soliman A DabroumM S Mahmoud andM SolimanldquoGuaranteed-cost reliable control with regional pole placementof a power systemrdquo Journal of 13e Franklin Institute vol 348no 5 pp 884ndash898 2011
[7] X Li and X-B Wu ldquoGuaranteed cost fault-tolerant controllerdesign of networked control systems under variable-periodsamplingrdquo Information Technology Journal vol 8 no 4 pp 537ndash543 2009
[8] L Zhang and G Orosz ldquoMotif-Based Design for ConnectedVehicle Systems in Presence of Heterogeneous ConnectivityStructures and Time Delaysrdquo IEEE Transactions on IntelligentTransportation Systems vol 17 no 6 pp 1638ndash1651 2016
[9] Z Li G Guo and Z Liu ldquoCommunication parameter designfor networked control systems with the slotted ALOHA accessprotocolrdquo Information Sciences vol 447 pp 205ndash215 2018
[10] K Lu G Jing and L Wang ldquoDistributed algorithm for solv-ing convex inequalitiesrdquo Institute of Electrical and ElectronicsEngineers Transactions on Automatic Control vol 63 no 8 pp2670ndash2677 2018
[11] Q Zhu K Lu and Y Zhu ldquoObserver-based feedback controlof networked control systems with delays and packet dropoutsrdquoJournal of Dynamic SystemsMeasurement andControl vol 138no 2 pp 1ndash8 2016
Mathematical Problems in Engineering 19
[12] Y Li H Li and W Sun ldquoEvent-triggered control for robust setstabilization of logical control networksrdquo Automatica vol 95pp 556ndash560 2018
[13] X Luan P Shi and F Liu ldquoStabilization of networked controlsystems with random delaysrdquo IEEE Transactions on IndustrialElectronics vol 58 no 9 pp 4323ndash4330 2011
[14] Y Zhang and J Jiang ldquoBibliographical review on reconfigurablefault-tolerant control systemsrdquo Annual Reviews in Control vol32 no 2 pp 229ndash252 2008
[15] N H Ei-Farra A Gani and P D Christofides ldquoFault-tolerantcontrol of process systems using communication networksrdquoAIChE Journal vol 51 no 6 pp 1665ndash1682 2005
[16] H R Karimi and H Gao ldquoNew delay-dependent exponentialHinfin synchronization for uncertain neural networks withmixedtime delaysrdquo IEEE Transactions on Systems Man and Cybernet-ics Part B Cybernetics vol 40 no 1 pp 173ndash185 2010
[17] Y N Guo Q Y Zhang D W Gong and J H Zhang ldquoRobustfault-tolerant control of networked control systems with time-varying delaysrdquoControl andDecision vol 23 no 6 pp 689ndash6922008
[18] Z Mao and B Jiang ldquoFault identification and fault-tolerantcontrol for a class of networked control systemsrdquo InternationalJournal of Innovative Computing Information and Control vol3 no 5 pp 1121ndash1130 2007
[19] C-X Yang Z-H Guan and J Huang ldquoStochastic fault tolerantcontrol of networked control systemsrdquo Journal of 13e FranklinInstitute vol 346 no 10 pp 1006ndash1020 2009
[20] Z Mao Y Pan B Jiang and W Chen ldquoFault Detectionfor a Class of Nonlinear Networked Control Systems withCommunication Constraintsrdquo International Journal of ControlAutomation and Systems vol 16 no 1 pp 256ndash264 2018
[21] A Qiu J Gu C Wen and J Zhang ldquoSelf-triggered faultestimation and fault tolerant control for networked controlsystemsrdquo Neurocomputing vol 272 no 1 pp 629ndash637 2018
[22] Q Zhu K Lu G Xie and Y Zhu ldquoGuaranteed Cost Fault-Tolerant Control for Networked Control Systems with SensorFaultsrdquoMathematical Problems in Engineering vol 2015 ArticleID 549347 9 pages 2015
[23] W Wu and Y Zhang ldquoEvent-triggered fault-tolerant controland scheduling codesign for nonlinear networked control sys-tems with medium-access constraint and packet disorderingrdquoInternational Journal of Robust and Nonlinear Control vol 28no 4 pp 1182ndash1198 2018
[24] X Xiao and X-J Li ldquoAdaptive dynamic programming method-based synchronisation control of a class of complex dynamicalnetworks with unknown dynamics and actuator faultsrdquo IETControl 13eory amp Applications vol 12 no 2 pp 291ndash298 2018
[25] PMhaskar AGani CMcFall PDChristofides and J FDavisldquoFault-tolerant control of nonlinear process systems subject tosensor faultsrdquo AIChE Journal vol 53 no 3 pp 654ndash668 2007
[26] M Liu P Shi L Zhang and X Zhao ldquoFault-tolerant controlfor nonlinear Markovian jump systems via proportional andderivative sliding mode observer techniquerdquo IEEE Transactionson Circuits and Systems I Regular Papers vol 58 no 11 pp2755ndash2764 2011
[27] S Li D Sauter C Aubrun and J Yame ldquoStability guaranteedactive fault-tolerant control of networked control systemsrdquoJournal of Control Science and Engineering vol 2008 Article ID189064 9 pages 2008
[28] X Y Luo M J Shang C L Chen and X P Guan ldquoGuaranteedcost active fault-tolerant control of networked control system
with packet dropout and transmission delayrdquo InternationalJournal of Automation and Computing vol 7 no 4 pp 509ndash5152010
[29] Q Zhu B Xie and Y Zhu ldquoGuaranteed Cost Control forMultirate Networked Control Systems with Both Time-Delayand Packet-Dropoutrdquo Mathematical Problems in Engineeringvol 2014 Article ID 637329 9 pages 2014
[30] R Manivannan R Samidurai J Cao and M Perc ldquoDesign ofResilient Reliable Dissipativity Control for Systems with Actu-ator Faults and Probabilistic Time-Delay Signals via Sampled-Data Approachrdquo IEEE Transactions on Systems Man andCybernetics Systems 2018
[31] R Manivannan R Samidurai J Cao A Alsaedi and F EAlsaadi ldquoNon-Fragile Extended Dissipativity Control Designfor Generalized Neural Networks with Interval Time-DelaySignalsrdquo Asian Journal of Control 2019
[32] Q Gao and N Olgac ldquoBounds of imaginary spectra of LTIsystems in the domain of two of the multiple time delaysrdquoAutomatica vol 72 pp 235ndash241 2016
[33] Q Gao A S Kammer U Zalluhoglu and N Olgac ldquoCriticaleffects of the polarity change in delayed states within anLTI dynamics with multiple delaysrdquo Institute of Electrical andElectronics Engineers Transactions onAutomatic Control vol 60no 11 pp 3018ndash3022 2015
[34] Q Gao Z Zhang and C Yang ldquoSign inverting control andits important properties for multiple time-delayed systemsrdquo inProceedings of the 10th ASME Dynamic Systems and ControlConference pp 979ndash984 Virginia USA 2017
[35] Y M Zhang and J Jiang ldquoActive fault-tolerant control systemagainst partial actuator failuresrdquo IEE Proceedings Control13eoryand Applications vol 149 no 1 pp 95ndash104 2002
[36] G Garcia J Bernussou andD Arzelier ldquoRobust stabilization ofdiscrete-time linear systems with norm-bounded time-varyinguncertaintyrdquo Systems amp Control Letters vol 22 no 5 pp 327ndash339 1994
[37] Y Wang L Xie and C E de Souza ldquoRobust control of a classof uncertain nonlinear systemsrdquo Systems amp Control Letters vol19 no 2 pp 139ndash149 1992
[38] D Yue E Tian and Y Zhang ldquoA piecewise analysis methodto stability analysis of linear continuousdiscrete systems withtime-varying delayrdquo International Journal of Robust and Non-linear Control vol 19 no 13 pp 1493ndash1518 2009
[39] X-J Jing D-L Tan and Y-C Wang ldquoAn LMI approach tostability of systems with severe time-delayrdquo IEEE Transactionson Automatic Control vol 49 no 7 pp 1192ndash1195 2004
[40] D Yue Q-L Han and J Lam ldquoNetwork-based robust Hinfincontrol of systems with uncertaintyrdquo Automatica vol 41 no 6pp 999ndash1007 2005
[41] Z Wang F Yang D W C Ho and X Liu ldquoRobust Hinfincontrol for networked systemswith randompacket lossesrdquo IEEETransactions on Systems Man and Cybernetics Part B vol 37no 4 pp 916ndash924 2007
[42] M S Mahmoud ldquoControl of uncertain state-delay systemsguaranteed cost approachrdquo IMA Journal of Mathematical Con-trol and Information vol 18 no 1 pp 109ndash128 2001
[43] D Yue C Peng andG Y Tang ldquoGuaranteed cost control of lin-ear systems over networks with state and input quantisationsrdquoIEE Proceedings Control 13eory and Applications vol 153 no 6pp 658ndash664 2006
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Mathematical Problems in Engineering 19
[12] Y Li H Li and W Sun ldquoEvent-triggered control for robust setstabilization of logical control networksrdquo Automatica vol 95pp 556ndash560 2018
[13] X Luan P Shi and F Liu ldquoStabilization of networked controlsystems with random delaysrdquo IEEE Transactions on IndustrialElectronics vol 58 no 9 pp 4323ndash4330 2011
[14] Y Zhang and J Jiang ldquoBibliographical review on reconfigurablefault-tolerant control systemsrdquo Annual Reviews in Control vol32 no 2 pp 229ndash252 2008
[15] N H Ei-Farra A Gani and P D Christofides ldquoFault-tolerantcontrol of process systems using communication networksrdquoAIChE Journal vol 51 no 6 pp 1665ndash1682 2005
[16] H R Karimi and H Gao ldquoNew delay-dependent exponentialHinfin synchronization for uncertain neural networks withmixedtime delaysrdquo IEEE Transactions on Systems Man and Cybernet-ics Part B Cybernetics vol 40 no 1 pp 173ndash185 2010
[17] Y N Guo Q Y Zhang D W Gong and J H Zhang ldquoRobustfault-tolerant control of networked control systems with time-varying delaysrdquoControl andDecision vol 23 no 6 pp 689ndash6922008
[18] Z Mao and B Jiang ldquoFault identification and fault-tolerantcontrol for a class of networked control systemsrdquo InternationalJournal of Innovative Computing Information and Control vol3 no 5 pp 1121ndash1130 2007
[19] C-X Yang Z-H Guan and J Huang ldquoStochastic fault tolerantcontrol of networked control systemsrdquo Journal of 13e FranklinInstitute vol 346 no 10 pp 1006ndash1020 2009
[20] Z Mao Y Pan B Jiang and W Chen ldquoFault Detectionfor a Class of Nonlinear Networked Control Systems withCommunication Constraintsrdquo International Journal of ControlAutomation and Systems vol 16 no 1 pp 256ndash264 2018
[21] A Qiu J Gu C Wen and J Zhang ldquoSelf-triggered faultestimation and fault tolerant control for networked controlsystemsrdquo Neurocomputing vol 272 no 1 pp 629ndash637 2018
[22] Q Zhu K Lu G Xie and Y Zhu ldquoGuaranteed Cost Fault-Tolerant Control for Networked Control Systems with SensorFaultsrdquoMathematical Problems in Engineering vol 2015 ArticleID 549347 9 pages 2015
[23] W Wu and Y Zhang ldquoEvent-triggered fault-tolerant controland scheduling codesign for nonlinear networked control sys-tems with medium-access constraint and packet disorderingrdquoInternational Journal of Robust and Nonlinear Control vol 28no 4 pp 1182ndash1198 2018
[24] X Xiao and X-J Li ldquoAdaptive dynamic programming method-based synchronisation control of a class of complex dynamicalnetworks with unknown dynamics and actuator faultsrdquo IETControl 13eory amp Applications vol 12 no 2 pp 291ndash298 2018
[25] PMhaskar AGani CMcFall PDChristofides and J FDavisldquoFault-tolerant control of nonlinear process systems subject tosensor faultsrdquo AIChE Journal vol 53 no 3 pp 654ndash668 2007
[26] M Liu P Shi L Zhang and X Zhao ldquoFault-tolerant controlfor nonlinear Markovian jump systems via proportional andderivative sliding mode observer techniquerdquo IEEE Transactionson Circuits and Systems I Regular Papers vol 58 no 11 pp2755ndash2764 2011
[27] S Li D Sauter C Aubrun and J Yame ldquoStability guaranteedactive fault-tolerant control of networked control systemsrdquoJournal of Control Science and Engineering vol 2008 Article ID189064 9 pages 2008
[28] X Y Luo M J Shang C L Chen and X P Guan ldquoGuaranteedcost active fault-tolerant control of networked control system
with packet dropout and transmission delayrdquo InternationalJournal of Automation and Computing vol 7 no 4 pp 509ndash5152010
[29] Q Zhu B Xie and Y Zhu ldquoGuaranteed Cost Control forMultirate Networked Control Systems with Both Time-Delayand Packet-Dropoutrdquo Mathematical Problems in Engineeringvol 2014 Article ID 637329 9 pages 2014
[30] R Manivannan R Samidurai J Cao and M Perc ldquoDesign ofResilient Reliable Dissipativity Control for Systems with Actu-ator Faults and Probabilistic Time-Delay Signals via Sampled-Data Approachrdquo IEEE Transactions on Systems Man andCybernetics Systems 2018
[31] R Manivannan R Samidurai J Cao A Alsaedi and F EAlsaadi ldquoNon-Fragile Extended Dissipativity Control Designfor Generalized Neural Networks with Interval Time-DelaySignalsrdquo Asian Journal of Control 2019
[32] Q Gao and N Olgac ldquoBounds of imaginary spectra of LTIsystems in the domain of two of the multiple time delaysrdquoAutomatica vol 72 pp 235ndash241 2016
[33] Q Gao A S Kammer U Zalluhoglu and N Olgac ldquoCriticaleffects of the polarity change in delayed states within anLTI dynamics with multiple delaysrdquo Institute of Electrical andElectronics Engineers Transactions onAutomatic Control vol 60no 11 pp 3018ndash3022 2015
[34] Q Gao Z Zhang and C Yang ldquoSign inverting control andits important properties for multiple time-delayed systemsrdquo inProceedings of the 10th ASME Dynamic Systems and ControlConference pp 979ndash984 Virginia USA 2017
[35] Y M Zhang and J Jiang ldquoActive fault-tolerant control systemagainst partial actuator failuresrdquo IEE Proceedings Control13eoryand Applications vol 149 no 1 pp 95ndash104 2002
[36] G Garcia J Bernussou andD Arzelier ldquoRobust stabilization ofdiscrete-time linear systems with norm-bounded time-varyinguncertaintyrdquo Systems amp Control Letters vol 22 no 5 pp 327ndash339 1994
[37] Y Wang L Xie and C E de Souza ldquoRobust control of a classof uncertain nonlinear systemsrdquo Systems amp Control Letters vol19 no 2 pp 139ndash149 1992
[38] D Yue E Tian and Y Zhang ldquoA piecewise analysis methodto stability analysis of linear continuousdiscrete systems withtime-varying delayrdquo International Journal of Robust and Non-linear Control vol 19 no 13 pp 1493ndash1518 2009
[39] X-J Jing D-L Tan and Y-C Wang ldquoAn LMI approach tostability of systems with severe time-delayrdquo IEEE Transactionson Automatic Control vol 49 no 7 pp 1192ndash1195 2004
[40] D Yue Q-L Han and J Lam ldquoNetwork-based robust Hinfincontrol of systems with uncertaintyrdquo Automatica vol 41 no 6pp 999ndash1007 2005
[41] Z Wang F Yang D W C Ho and X Liu ldquoRobust Hinfincontrol for networked systemswith randompacket lossesrdquo IEEETransactions on Systems Man and Cybernetics Part B vol 37no 4 pp 916ndash924 2007
[42] M S Mahmoud ldquoControl of uncertain state-delay systemsguaranteed cost approachrdquo IMA Journal of Mathematical Con-trol and Information vol 18 no 1 pp 109ndash128 2001
[43] D Yue C Peng andG Y Tang ldquoGuaranteed cost control of lin-ear systems over networks with state and input quantisationsrdquoIEE Proceedings Control 13eory and Applications vol 153 no 6pp 658ndash664 2006
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom