Embed Size (px)
Citation preview
Green TeamSpeed System
Proportional Only Controller Design and Experimental
11-09-05
Dustin FraleyDeAndre Strong
Stephanie Wilson
Outline Description of Speed System Previous work
Step Response Frequency Response Root Locus
Proportional only controller response curves Model Experimental
Results Conclusions

Speed System Diagram
SRC
1
ST
1
Motor /
Generator
SCZ
1
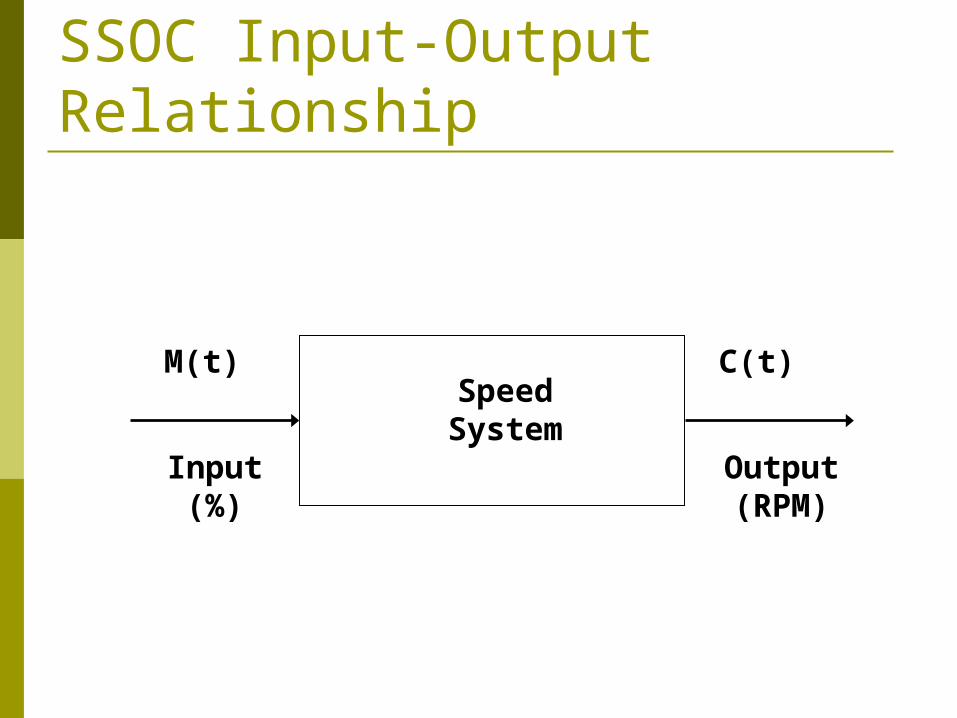
SSOC Input-Output Relationship
SpeedSystem
M(t)
Input(%)
C(t)
Output
(RPM)

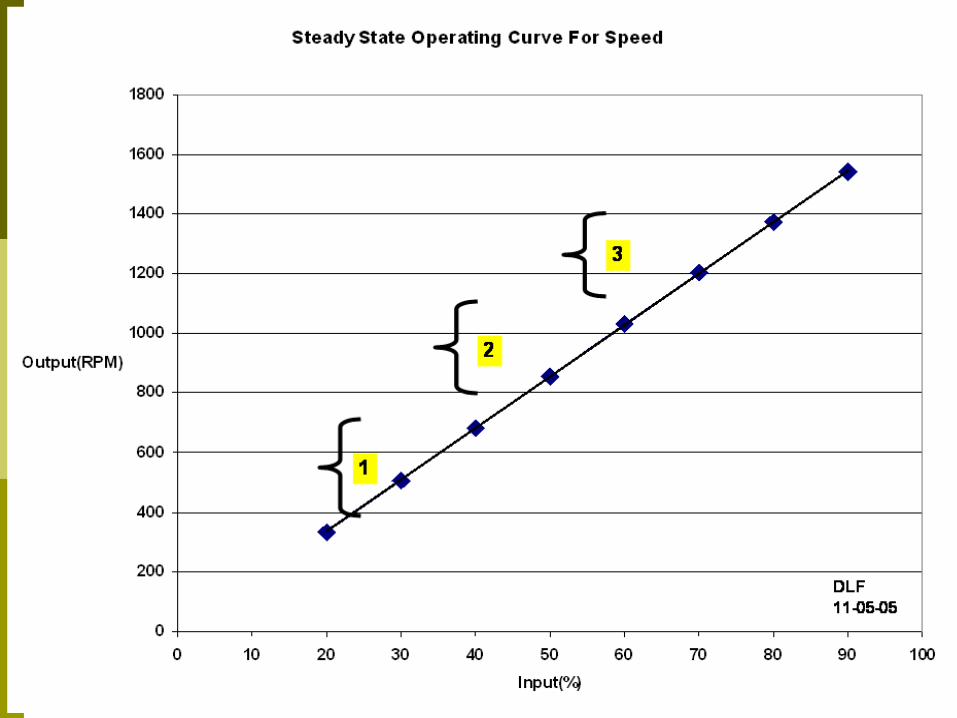
Steady State Operating Curve For Speed
C = 17.3m - 9.7
0
200
400
600
800
1000
1200
1400
1600
1800
0 10 20 30 40 50 60 70 80 90 100
Input(%)
Output(RPM)
DLF9-1-05
300 RPM-1500 RPM
20 %-90 %
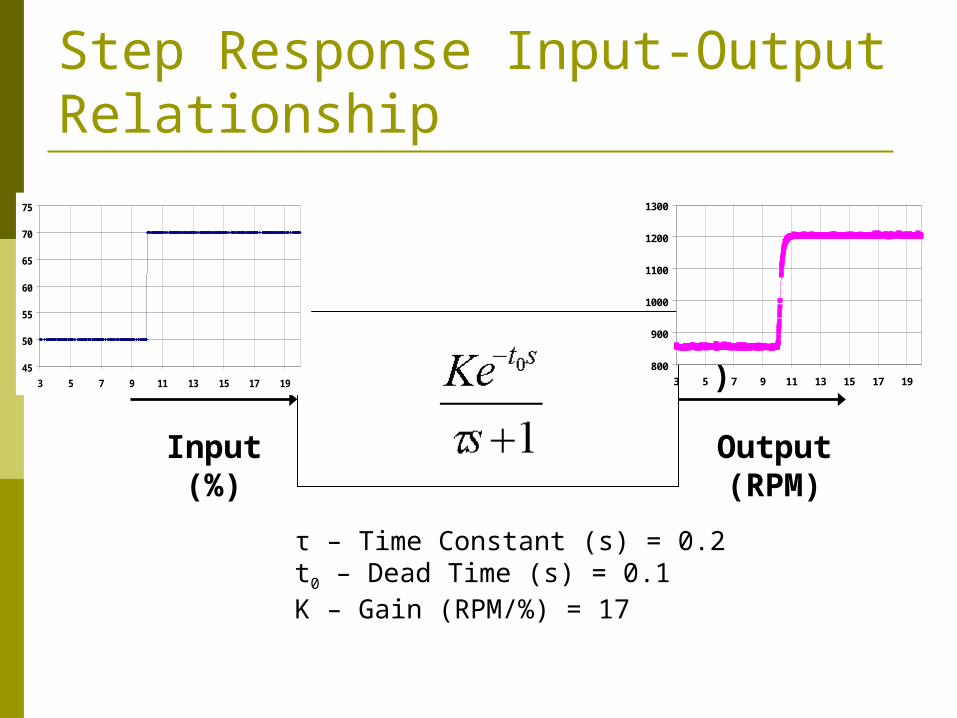
Step Response Input-Output Relationship
Ke-t0
M(t)
Input(%)
C(t)
Output
(RPM)
800
900
1000
1100
1200
1300
3 5 7 9 11 13 15 17 1945
50
55
60
65
70
75
3 5 7 9 11 13 15 17 19
τ – Time Constant (s) = 0.2 t0 – Dead Time (s) = 0.1 K – Gain (RPM/%) = 17

Frequency Response Input-Output Relationship
Ke-t0
M(t)
Input(%)
C(t)
Output
(RPM)τ – Time Constant (s)t0 – Dead Time (s)
K – Gain (RPM/%)
45
55
65
75
2 4 6 8 10 12500
700
900
1100
1300
1500
2 4 6 8 10 12

tau - t0 - tau -0.2 s
t0 – 0.1 s

Step and Frequency Response Experiments Conclusions FOPDT Parameters
= 0.2 s to = 0.1 s K = 17 RPM/%
order about 1st fu = 3.5 Hz
Kcu= 0.3%/RPM
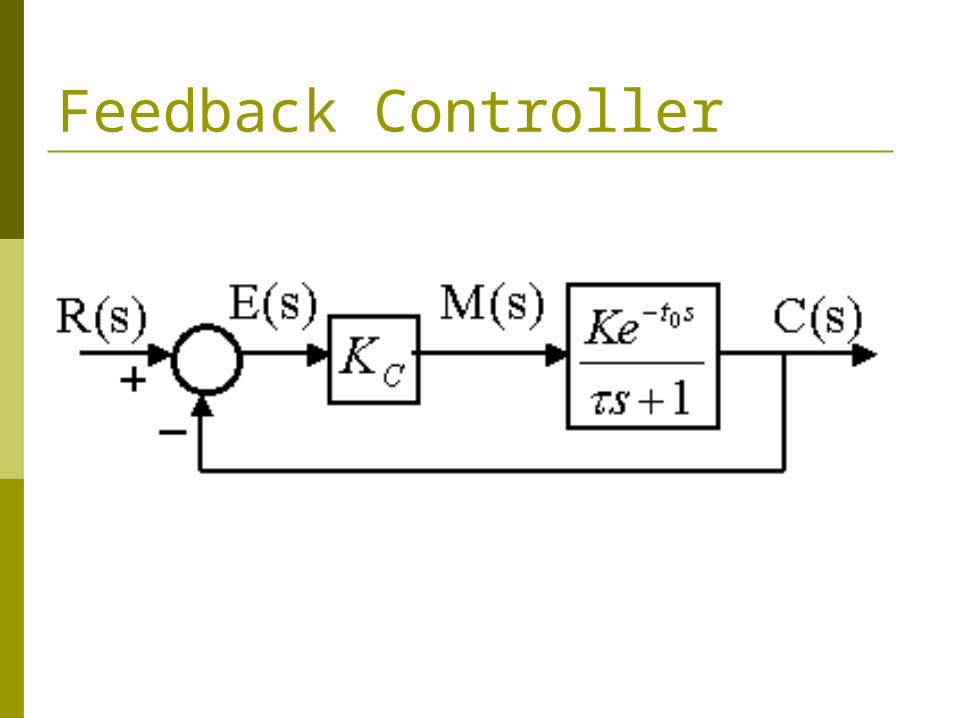
Feedback Controller

Characteristic Equation (CE)
st
st
e st
21
21
0
0
0
Padés Approximation
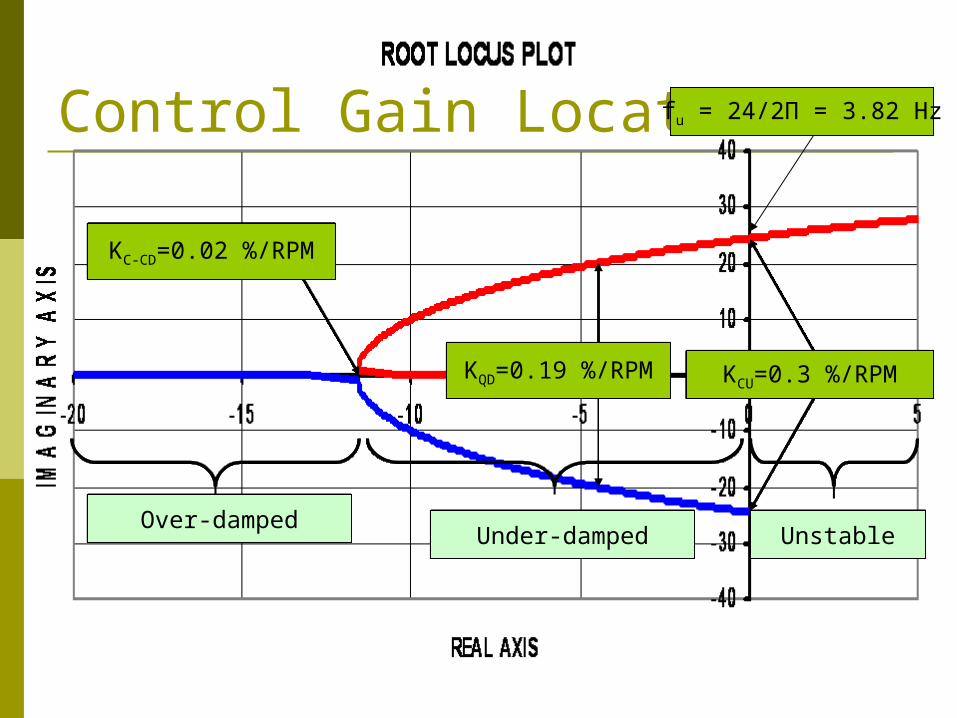
Control Gain Locations
KC-CD=0.02 %/RPM
KCU=0.3 %/RPMKQD=0.19 %/RPM
Over-dampedUnder-damped Unstable
fu = 24/2Π = 3.82 Hz

Root Locus Conclusions Ultimate Kcu= 0.3
Quarter Decay Kc = 0.19
Critically Damping KCD = 0.02
Underdamped 0.02<Kc<0.3
Overdamped 0<Kc<0.02
*all units are % / RPM

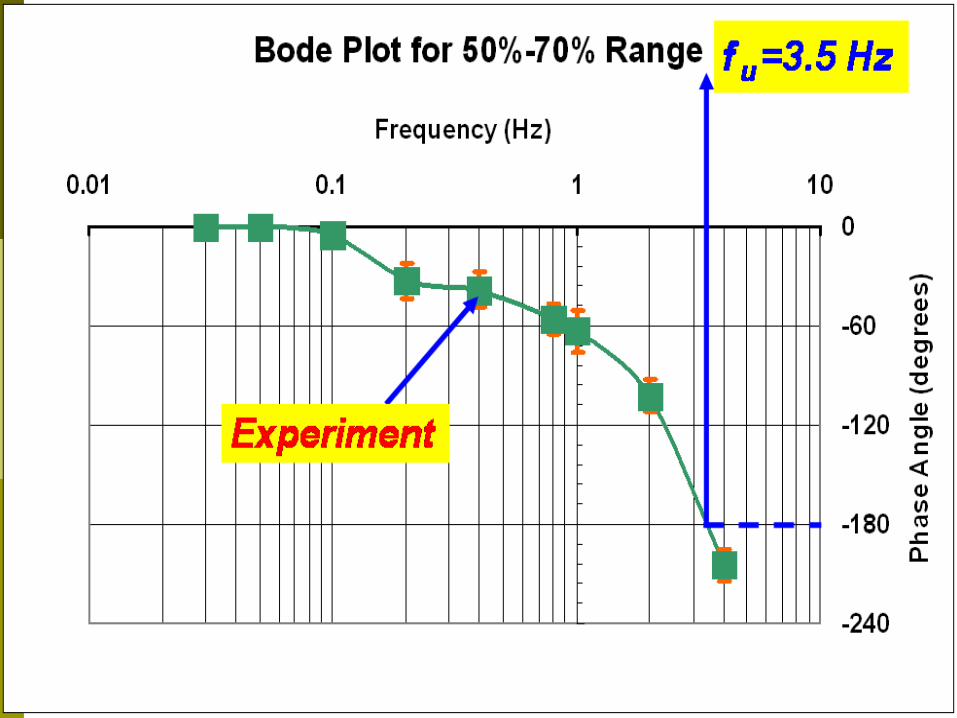
Determination of fu Bode plots
fu = 3.5 Hz
Characteristic Equation (CE) fu = 4 Hz
Root Locus fu = 3.8 Hz
0171)85.025.0(1.0 22 cuucuu KiKi
P-only Controller Analysis ModelFOPDT Parameters
= 0.2 s to = 0.1 s K = 17 RPM/%
Values found for Ultimate (Marginal Stability) Quarter Decay Critical Damping Overdamped
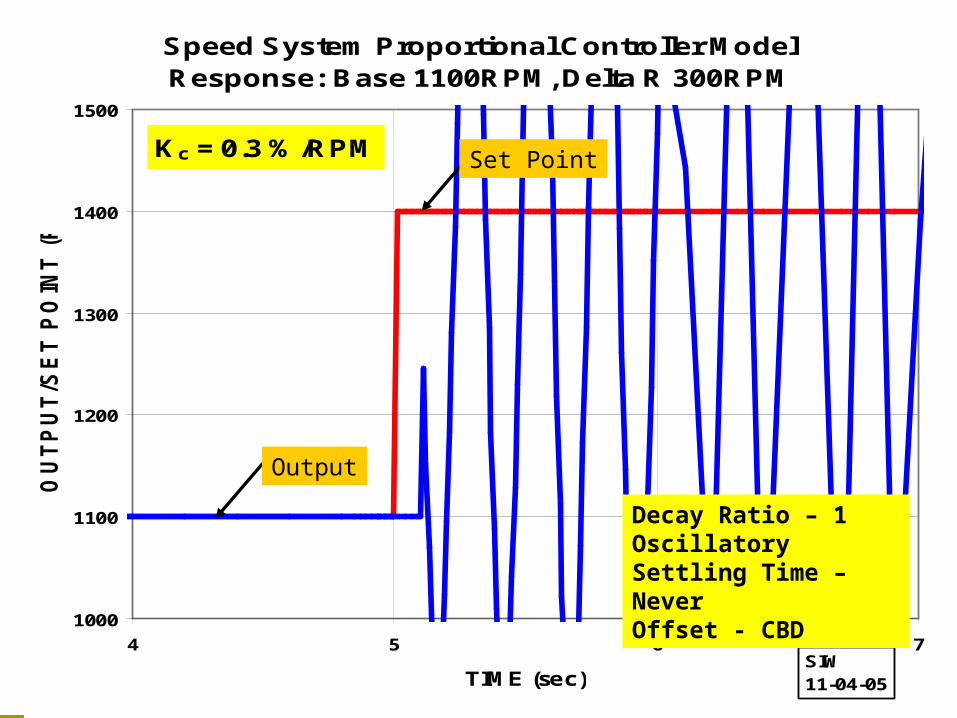
Speed System Proportional Controller Model Response: Base 1100RPM, Delta R 300RPM
1000
1100
1200
1300
1400
1500
4 5 6 7
TIME (sec)
OU
TP
UT
/SE
T P
OIN
T (
RP
M)
Kc = 0.3 %/RPM
SIW11-04-05
Decay Ratio – 1OscillatorySettling Time – NeverOffset - CBD
Set Point
Output

Speed System Proportional Controller Model Response: Base 1100RPM, Delta R 300RPM
1000
1100
1200
1300
1400
1500
4 5 6 7
TIME (sec)
OU
TP
UT
/SE
T P
OIN
T (
RP
M)
Kc = 0.19 %/RPM
SIW11-04-05
Decay Ratio – 0.25OscillatorySettling Time – 1.25 sOffset – 71 RPM
Set Point
Output

Speed System Proportional Controller Model Response: Base 1100RPM, Delta R 300RPM
1000
1100
1200
1300
1400
1500
4 5 6 7
TIME (sec)
OU
TP
UT
/SE
T P
OIN
T (
RP
M)
Kc = 0.022 %/RPM
SIW11-04-05
Decay Ratio – 0MonotonicSettling Time – 0.5 sOffset – 219 RPM
Set Point
Output

Speed System Proportional Controller Model Response: Base 1100RPM, Delta R 300RPM
1000
1100
1200
1300
1400
1500
4 5 6 7
TIME (sec)
OU
TP
UT
/SE
T P
OIN
T (
RP
M)
Kc = 0.018 %/RPM
SIW11-04-05
Decay Ratio – 0MonotonicSettling Time – 0.5 sOffset – 230 RPM
Set Point
Output

Model Decay Ratio & Offset as Function of Kc For 1100-1400 RPM
0
0.2
0.4
0.6
0.8
1
1.2
0 0.1 0.2 0.3
Kc (%/RPM)
Dec
ay R
atio
0
40
80
120
160
200
240
Off
set
(RP
M)
Decay Ratio Offset (RPM)
SIW11-5-05
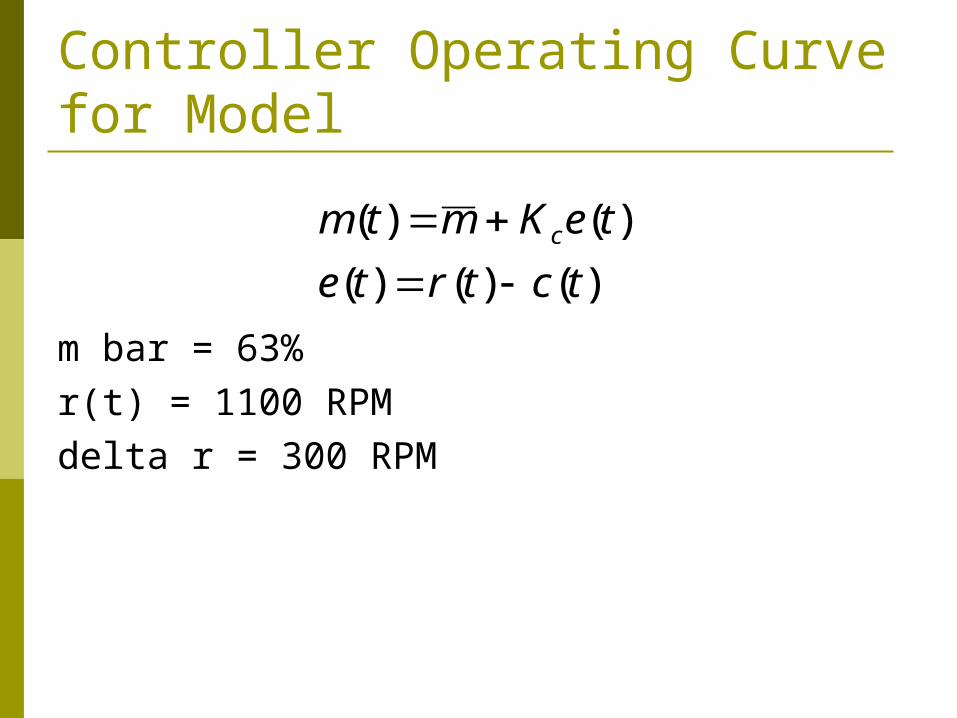
Controller Operating Curve for Model
)()()(
)()(
tctrte
teKmtm c
m bar = 63%r(t) = 1100 RPMdelta r = 300 RPM
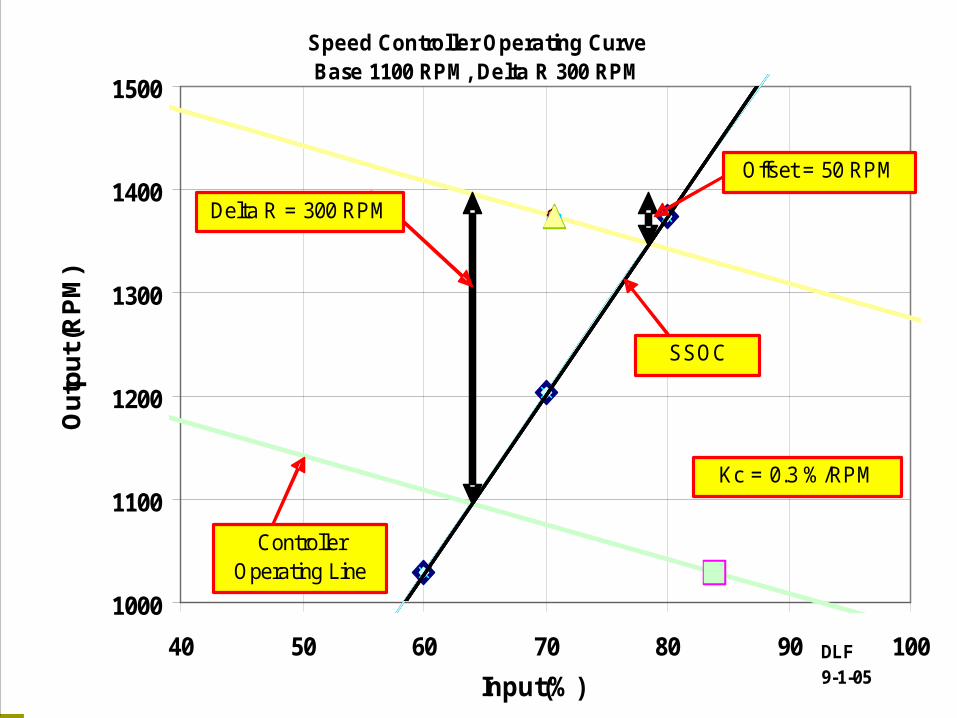
Speed Controller Operating CurveBase 1100 RPM, Delta R 300 RPM
1000
1100
1200
1300
1400
1500
40 50 60 70 80 90 100
Input(%)
Ou
tpu
t (R
PM
)
DLF9-1-05
Delta R = 300 RPM
Offset = 50 RPM
SSOC
Controller Operating Line
Kc = 0.3 %/RPM
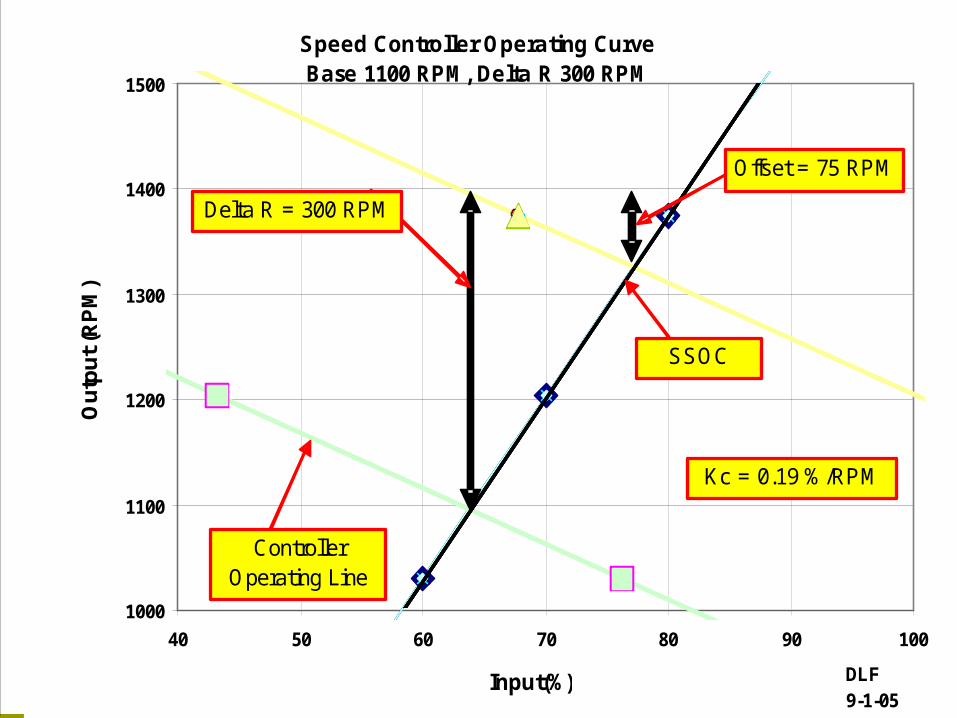
Speed Controller Operating CurveBase 1100 RPM, Delta R 300 RPM
1000
1100
1200
1300
1400
1500
40 50 60 70 80 90 100
Input(%)
Ou
tpu
t (R
PM
)
DLF9-1-05
Delta R = 300 RPM
Offset = 75 RPM
SSOC
Controller Operating Line
Kc = 0.19 %/RPM

Speed Controller Operating CurveBase 1100 RPM, Delta R 300 RPM
1000
1100
1200
1300
1400
1500
40 50 60 70 80 90 100
Input(%)
Ou
tpu
t (R
PM
)
DLF9-1-05
Delta R = 300 RPMOffset = 225 RPM
SSOC
Controller Operating Line
Kc = 0.022 %/RPM

Speed Controller Operating CurveBase 1100 RPM, Delta R 300 RPM
1000
1100
1200
1300
1400
1500
40 50 60 70 80 90 100
Input(%)
Out
put (
RPM
)
DLF9-1-05
Delta R = 300 RPMOffset = 250 RPM
SSOC
Controller Operating Line Kc = 0.018 %/RPM

P-only Controller Analysis ExperimentalFOPDT Parameters
= 0.2 s to = 0.1 s K = 17 RPM/%
Values found for Ultimate (Marginal Stability) Quarter Decay Critical Damping Overdamped

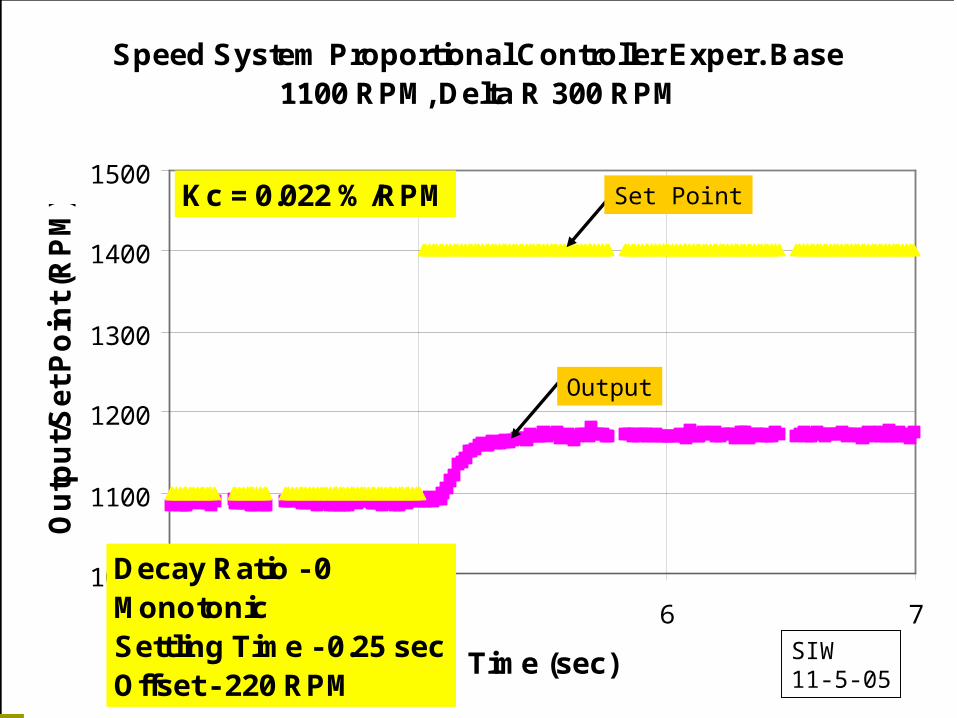
Speed System Proportional Controller Exper. Base 1100 RPM, Delta R 300 RPM
1000
1100
1200
1300
1400
1500
4 5 6 7
Time (sec)
Ou
tpu
t/S
et
Po
int
(RP
M) Kc = 0.3 %/RPM
Decay Ratio - 1OscillatorySettling Time - neverOffset - ?
Set Point
Output
SIW11-5-05

RPM
Speed System Proportional Controller Exper. Base 1100 RPM, Delta R 300 RPM
1000
1100
1200
1300
1400
1500
4 5 6 7
Time (sec)
Ou
tpu
t/S
et
Po
int
(RP
M) Kc = 0.19 %/RPM
Decay Ratio - 0.4OscillatorySettling Time - 5 secOffset - 75 RPM
Set Point
Output
SIW11-5-05
RPM
Speed System Proportional Controller Exper. Base 1100 RPM, Delta R 300 RPM
1000
1100
1200
1300
1400
1500
4 5 6 7
Time (sec)
Ou
tpu
t/S
et
Po
int
(RP
M) Kc = 0.022 %/RPM
Decay Ratio - 0MonotonicSettling Time - 0.25 secOffset - 220 RPM
Set Point
Output
SIW11-5-05
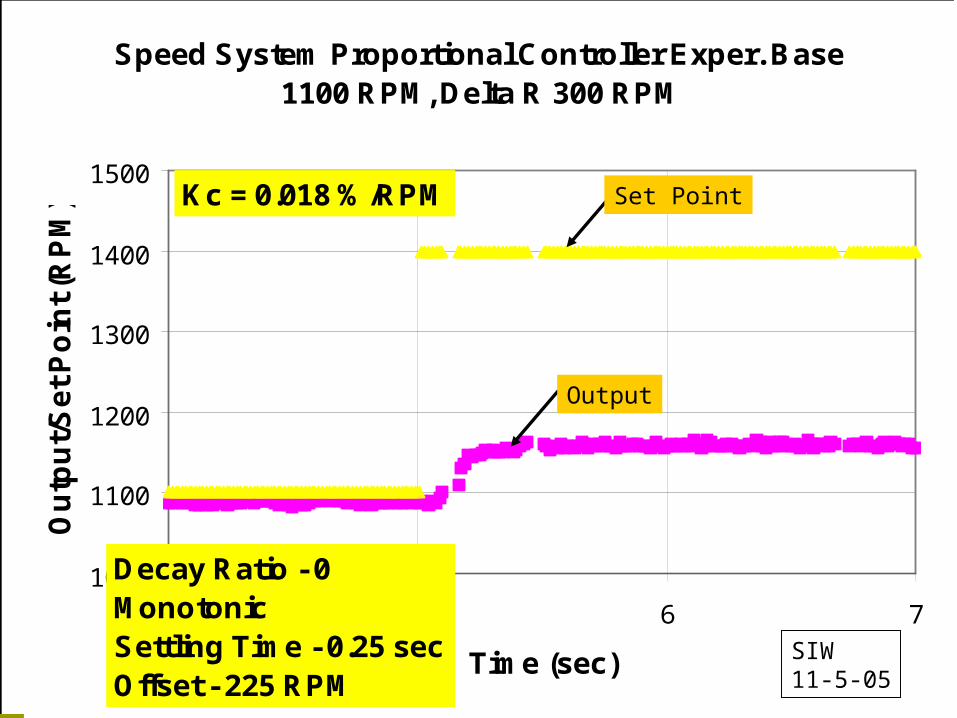
Speed System Proportional Controller Exper. Base 1100 RPM, Delta R 300 RPM
1000
1100
1200
1300
1400
1500
4 5 6 7
Time (sec)
Ou
tpu
t/S
et
Po
int
(RP
M) Kc = 0.018 %/RPM
Decay Ratio - 0MonotonicSettling Time - 0.25 secOffset - 225 RPM
Set Point
Output
SIW11-5-05

Experimental Decay Ratio & Offset as Function of Kc For 1100-1400 RPM
0
0.2
0.4
0.6
0.8
1
1.2
0 0.1 0.2 0.3
Kc (%/RPM)
Dec
ay R
atio
0
50
100
150
200
250
Off
set
(RP
M)
Decay Ratio Offset (RPM)
SIW11-5-05could not
be determined
Model vs. Experimental Decay Ratio Settling Offset
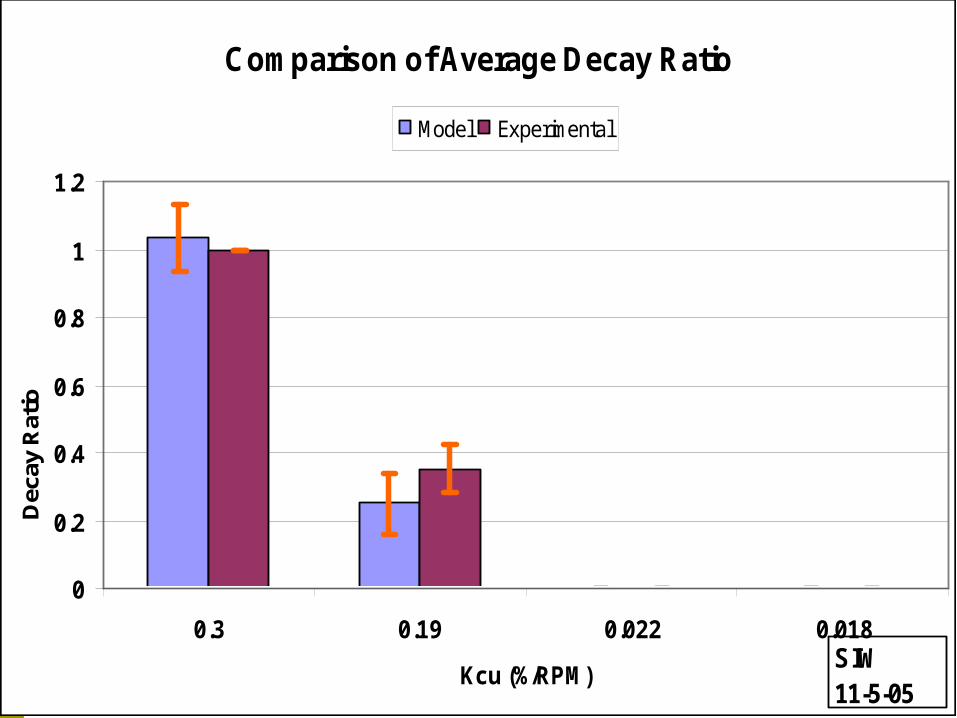
Comparison of Average Decay Ratio
0
0.2
0.4
0.6
0.8
1
1.2
0.3 0.19 0.022 0.018
Kcu (%/RPM)
Dec
ay R
atio
Model Experimental
SIW11-5-05
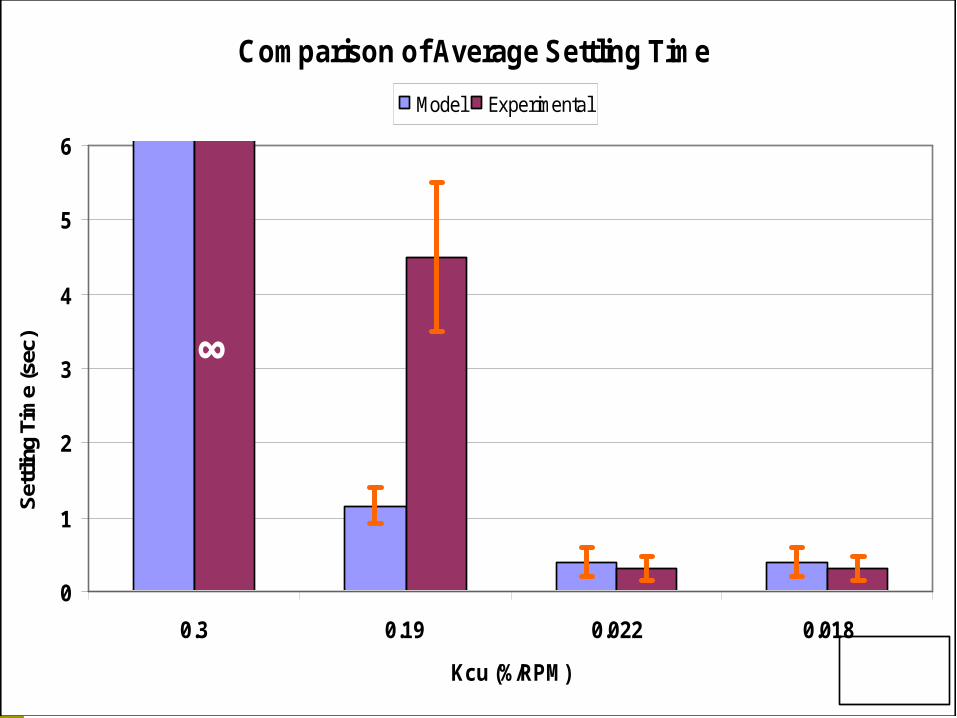
Comparison of Average Settling Time
0
1
2
3
4
5
6
0.3 0.19 0.022 0.018
Kcu (%/RPM)
Set
tling
Tim
e (s
ec)
Model Experimental
∞
∞
SIW11-5-05
∞
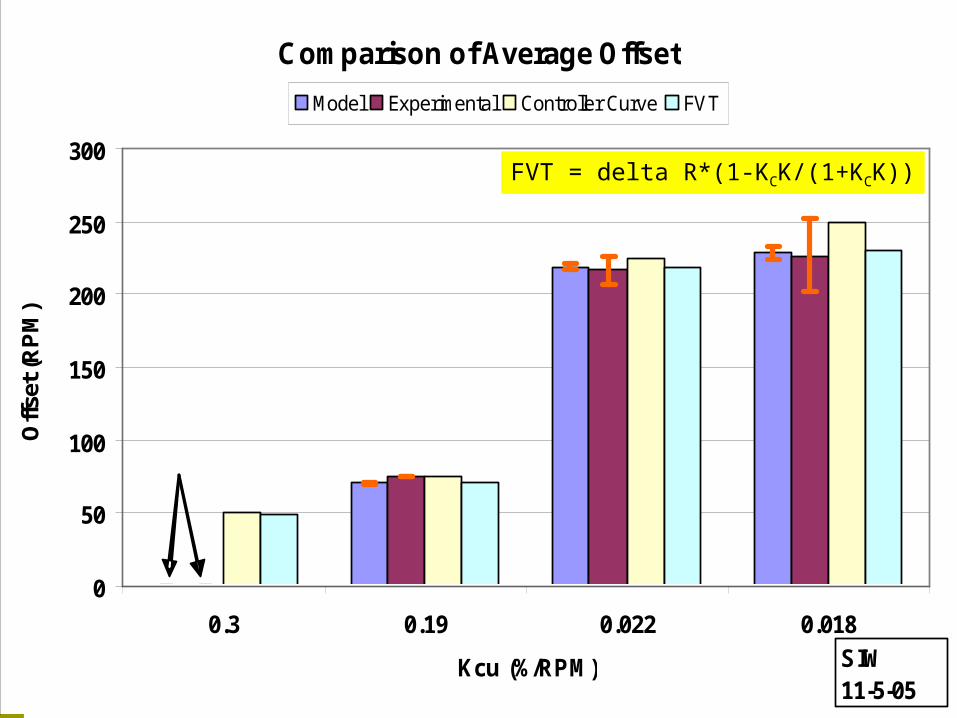
Comparison of Average Offset
0
50
100
150
200
250
300
0.3 0.19 0.022 0.018
Kcu (%/RPM)
Off
set
(RP
M)
Model Experimental Controller Curve FVT
SIW11-5-05
Could Not Be Determined
FVT = delta R*(1-KCK/(1+KCK))
Conclusions Low Kc values
Model and experimental responses are analogous
Higher Kc values Experimental responses never settle
Recommended Kc = 0.19 (%/RPM) High offset (75 RPM)
Proportional-Integral Feedback Controller