Embed Size (px)
Citation preview

No. 589 July 2018
Gradient-based limiting and stabilization of continuous Galerkin methods
D. Kuzmin
ISSN: 2190-1767

1Gradient-based limiting and stabilization ofcontinuous Galerkin methods
Dmitri Kuzmin
Abstract
In this paper, we stabilize and limit continuous Galerkin discretizations of a lineartransport equation using an algebraic approach to derivation of artificial diffusionoperators. Building on recent advances in the analysis and design of edge-based al-gebraic flux correction schemes for singularly perturbed convection-diffusion prob-lems, we derive algebraic stabilization operators that generate nonlinear high-orderstabilization in smooth regions and enforce discrete maximum principles every-where. The correction factors for antidiffusive element or edge contributions aredefined in terms of nodal gradients that vanish at local extrema. The proposed limit-ing strategy is linearity-preserving and provides Lipschitz continuity of constrainedterms. Numerical examples are presented for two-dimensional test problems.
Keywords: hyperbolic conservation laws, finite element methods, discrete maxi-mum principles, algebraic flux correction, linearity preservation
1.1 Introduction
Bound-preserving discretizations of hyperbolic conservation laws and convection-dominated transport problems use limiting techniques to enforce discrete maximumprinciples. Recent years have witnessed an increased interest of the finite elementcommunity in algebraic flux correction (AFC) schemes [9] based on various gen-eralizations of flux-corrected transport (FCT) algorithms and total variation dimin-ishing (TVD) methods. A major breakthrough in the theoretical analysis of AFCfor continuous finite elements was achieved by Barrenechea et al. [3, 4] whose re-cent work has provided a set of design principles for derivation of limiters that lead
TU Dortmund University, Institute of Applied Mathematics (LS III), Vogelpothsweg 87, 44227Dortmund, Germany
1

2 Dmitri Kuzmin
to well-posed nonlinear problems in the context of stationary convection-diffusionequations. Limiting techniques for continuous Galerkin discretizations of hyper-bolic problems were proposed in [2, 7, 12]. As shown in [7, 12], the use of the stan-dard Galerkin method as the AFC target for hyperbolic conservation laws may giverise to bounded ripples and nonphysical weak solutions. In fact, the Galerkin dis-cretization may even produce singular matrices on criss-cross (Union Jack) meshes[13]. The use of limiters restricts the range of possible solution values but does notrule out spurious oscillations within this range. In this paper, we design artificialdiffusion operators that introduce high-order stabilization in smooth regions and en-force preservation of local bounds in the vicinity of steep fronts. The element oredge contributions to the residual of the nonlinear system are constrained using lim-iters defined in terms of nodal gradients rather than nodal correction factors. Thisapproach leads to a limiting procedure that satisfies all essential design criteria.
1.2 Artificial diffusion operators
To make the presentation self-contained, we begin with an outline of the basic AFCmethodology [9] for C0 finite element discretizations of the hyperbolic equation
∂u∂ t
+∇ · (vu) = 0 in Ω (1.1)
to be solved in a bounded domain Ω with a Lipschitz boundary Γ . The velocityfield v is assumed to be known. At the inlet Γin = x ∈Γ : v ·n < 0, we impose theboundary condition u = 0 in a weak sense by using the variational formulation∫
Ω
w∂u∂ t
dx+∫
Γ
wumax0,v ·nds−∫
Ω
∇w · (vu)dx = 0, (1.2)
where n is the unit outward normal and w ∈ H1(Ω) is an admissible test function.The numerical solution uh = ∑
Nj=1 u jϕ j is defined in terms of continuous piecewise-
linear or multilinear Lagrange basis functions ϕ j associated with vertices x j of amesh (alias triangulation) Th. The standard Galerkin discretization leads to
MCdudt
+Au = 0, (1.3)
where MC = mi j is the consistent mass matrix, A = ai j is the discrete transportoperator, and u = ui is the vector of time-dependent nodal values.Introducing the lumped mass matrix ML = δi j ∑ j mi j and a symmetric artificialdiffusion operator D = di j, we construct the low-order approximation
MLdudt
+(A−D)u = 0 (1.4)

1 Gradient-based limiting and stabilization of CG methods 3
which is provably bound-preserving if ∑ j di j = 0 and di j ≥ maxai j,0,a ji for allj 6= i [4, 9]. The original Galerkin discretization (1.3) can be written as
MLdudt
+(A−D)u = f(
u,dudt
), fi = ∑
mf mi , (1.5)
where f = fi is the antidiffusive part that requires limiting. In edge-based AFCschemes, f m
i is the contribution of edge m to node i, and there exists a neighbor nodej 6= i such that f m
j =− f mi [4, 7, 9]. In element-based versions, f m
i is the contributionof element m to node i and ∑i f m
i = 0 by definition [10, 12]. In the 1D case, thedecompositions of f into edge and element contributions are equivalent.In the process of limiting, each component f m
i is multiplied by a solution-dependentcorrection factor αm ∈ [0,1]. This modification leads to the nonlinear system
MLdudt
+(A−D)u = f(
u,dudt
), fi = ∑
mα
m f mi . (1.6)
We define f mi and αm in the next section. The discretization in time can be performed
using a strong stability preserving (SSP) Runge-Kutta method [6]. Note that only thebackward Euler method is SSP without any restrictions on the time step.
1.3 Limiting of antidiffusive terms
First and foremost, the definition of correction factors αm should guarantee that thelimited antidiffusive term fi be local extremum diminishing (LED), i.e.,
umaxi := max
j∈Niu j = ui ⇒ fi ≤ 0, (1.7)
umini := min
j∈Niu j = ui ⇒ fi ≥ 0, (1.8)
where Ni = j ∈ 1, . . . ,N : mi j 6= 0 is the computational stencil of node i.Obviously, the LED property (1.7),(1.8) holds for αm satisfying (cf. [3, 5])
αm ≤ αi := min
1,
γi minumaxi −ui,ui−umin
i maxumax
i −ui,ui−umini + εh
∀i ∈N m, (1.9)
where N m is the set of nodes belonging to the element or edge, γi > 0 is a parameterto be defined in Section 1.3.2, h is the mesh size, and ε is a small positive constant.Theoretical and numerical studies of AFC schemes indicate that the use of linearity-preserving limiters is an essential prerequisite for achieving optimal accuracy ongeneral meshes [3, 5, 9, 10]. The bound αi in formula (1.9) is linearity preservingif αi = 1 whenever uh is linear on the patch Ωi = K ∈ Th : xi ∈ K of elementscontaining an internal node xi ∈Ω . According to the analysis of Barrenechea et al.

4 Dmitri Kuzmin
[3, 5], the nodal correction factor αi defined by (1.9) possesses this property if
γi ≥ γmini :=
maxx j∈∂Ωi |xi−x j|distxi,∂Ω conv
i , (1.10)
where | · | is the Euclidean norm and Ω convi is the convex hull of points x j ∈ Ωi.
Implicit time integration requires iterative solution of nonlinear systems and onlyconverged solutions are guaranteed to be bound preserving. Therefore, convergencebehavior of iterative solvers should also be taken into account. It is essential to guar-antee that each product αm f m
i be a Lipschitz-continuous function of nodal values.This property is used in proofs of existence and uniqueness for the nonlinear discreteproblem [3, 4] and secures convergence of fixed-point iterations based on deferredcorrection methods (see [1], Proposition 4.3). Faster convergence can be achieved,e.g., using Anderson acceleration [9] or differentiable LED limiters [2].
1.3.1 Nonlinear high-order stabilization
The straightforward choice αm = mini∈N m αi of the correction factor αm for f mi
corresponds to using the oscillatory Galerkin scheme (1.3) as the limiting target.In this section, we construct a stabilized AFC scheme using a definition of αm interms of limited nodal gradients g∗i such that g∗i = 0 if ui = umax
i or ui = umini at
an internal node xi ∈ Ω . Additionally, the gradient recovery procedure should beexact for linear functions. In Section 1.3.2, we use nodal correction factors αi of theform (1.9) to correct a linearity-preserving gradient reconstruction gi and obtain aLipschitz-continuous approximation g∗i = αigi satisfying the above requirements.An element-based AFC scheme with a stabilized high-order target is defined by
αm =
(min‖|∇um
h |‖C(Km), pmini∈N m |g∗i |‖ |∇um
h |‖C(Km)+ ε
)q
, (1.11)
where ‖ ·‖C(K) is the maximum norm. The parameters p≥ 1 and q ∈N act as steep-eners that make the limiter less diffusive. By default, we use p = q = 2.If a local extremum is attained at node i for any i∈N m, then |g∗i |= 0 and, therefore,αm = 0 in accordance with the LED criterion. If uh is linear on Ωi and the parameterγi is defined by (1.16), then αi = 1 and, therefore, g∗i = gi = ∇um
h . In general, ourformula (1.11) will produce αm = 1 if the magnitude of ∇um
h does not exceed that ofthe smallest nodal gradient by more than a factor of p. Lipschitz continuity of αm f m
ican be shown following Lohmann’s [11] proofs for edge-based tensor limiters.An edge-based counterpart of our gradient-based limiter (1.11) is defined by
αm =
(minp|g∗i · (xi−x j)|, |ui−u j|, p|g∗j · (xi−x j)||ui−u j|+ ε
)q
. (1.12)

1 Gradient-based limiting and stabilization of CG methods 5
A proof of Lipschitz continuity for q ∈ N follows from Lohmann’s analysis [11].If the gradient is nonsmooth, our method may produce αm < 1 even in the case wheng∗i = gi for all i. In contrast to limiters designed to recover the standard Galerkin dis-cretization whenever it satisfies the LED constraints, our definition of αm generatesnonlinear high-order dissipation in elements free of local extrema. On a uniformmesh of 1D linear elements both (1.11) and (1.12) lead to a symmetric limited posi-tive (SLIP) scheme [8] that switches between second- and fourth-order dissipation.In predictor-corrector algorithms of FCT type, high-order dissipation can also begenerated by adding nonlinear entropy viscosity [7] or linear gradient-based stabi-lization [10, 12]. However, the use of such artificial diffusion operators in iterativeAFC schemes inhibits convergence due to the lack of Lipschitz continuity.
1.3.2 Recovery of nodal gradients
If uh is linear on Ωi, then gi = ∇uh(xi) holds for any weighted average gi of the one-sided element gradients ∇uh|K(xi), K ∈ Ωi. For example, the global lumped-massL2 projection yields the averaged nodal gradient [9]
gi =1mi
∑j∈Ni
ci ju j =1mi
∑j∈Ni\i
ci j(u j−ui), (1.13)
mi =∫
Ω
ϕidx, ci j =∫
Ω
ϕi∇ϕ jdx. (1.14)
However, the so-defined gi does not necessarily vanish if a local maximum or mini-mum is attained at xi ∈Ω . To rectify this, we consider the limited gradient
g∗i = αigi =1mi
∑j∈Ni\i
ci jαi(u j−ui), (1.15)
where αi is the nodal correction factor defined by (1.9). The limited gradient recon-struction g∗i does vanish at local extrema. Lipschitz continuity of αi(u j−ui) can beshown using Lemma 6 in [4]. Linearity preservation is guaranteed under condition(1.10) since αi = 1 if uh is linear on Ωi. The use of the sharp bound γi := γmin
i definedby (1.10) requires calculation of the distance to the convex hull and leads to ratherdiffusive minmod limiters like the one proposed in [5]. To simplify the formula forγi and make the LED constraints less restrictive, we define γi as follows.
The anisotropy of a mesh element K ∈ Th can be characterized by the ratio of thelocal mesh size hK = diam(K) and the diameter ρK of the largest ball that fits into K.A family of triangulations Th is called regular if there exists a constant σ > 0 suchthat hK
ρK≤ σ for all K ∈ Th and all h. For triangular elements, ρK is the diameter of
the inscribed circle. Since hK ≥maxx j∈K |xi−x j| and ρK ≤ distxi,∂K∩∂Ω convi for

6 Dmitri Kuzmin
all K ∈ Ωi, condition (1.10) holds for parameters γi = γi(s), s≥ 1 defined by
γi = smaxK∈Ωi
hK
minK∈ΩiρK
. (1.16)
A reasonable default setting for iterative AFC schemes is s= 2. The limiter becomesless diffusive as s is increased but the use of γi γmin
i may cause convergenceproblems when it comes to iterative solution of nonlinear systems.
1.3.3 Recovery of nodal time derivatives
By (1.3) and (1.6), the term to be limited is given by f (u, u) = (ML−MC)u−Du.Using the Neumann series approximation [7] to M−1
C , we obtain
u = M−1L (I +(ML−MC)M−1
L )( f (u,0)− (A−D)u). (1.17)
This definition of u makes it possible to determine f (0, u) without recalculatingf (u,0). Moreover, the correct steady state behavior is preserved for u = 0.In our AFC scheme for time-dependent problems, we limit f m
i (u,0) using αm de-fined in Section 1.3.1. To provide continuity, the contribution of f m
i (0, u) is limitedusing a correction factor αm such that αm = 0 if αm = 0 (see below). In the element-based version of (1.6), the limited antidiffusive components are given by
f mi (u, u) = ∑
j∈N m\i
[mm
i jαm(ui− u j)+dm
i j αm(ui−u j)
], i ∈N m. (1.18)
The coefficients mmi j and dm
i j represent the contribution of Km ∈ Th to the globalmatrix entries mi j and di j, respectively. Algebraic residual correction schemes basedon such decompositions into element contributions can be found in [10, 12].The evolutionary part f m
i (0, u) is constrained using correction factors of the form
αm = min
1,β m αm‖|∇um
h |‖C(Km)
‖|∇umh |‖C(Km)+ ε
(1.19)
such that (αm‖|∇umh |‖C(Km))/(α
m‖|∇umh |‖C(Km))≤ β m, where β m > 0 should have
units of the reciprocal second s−1. In this work, we use β m = ‖v‖C(Km)/(2hKm).In the edge-based version of (1.6), we limit f m
i = fi j and f mj =− fi j as follows:
f mi (u, u) = mi jα
m(ui− u j)+di jαm(ui−u j), i, j=: N m, (1.20)
αm = min
1,β m αm|ui−u j|
|ui− u j|+ ε
. (1.21)
In pseudo-time-stepping schemes for steady-state computations, we use αm = 0.

1 Gradient-based limiting and stabilization of CG methods 7
1.4 Numerical examples
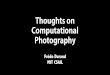
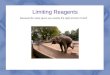
In Figures 1 and 2, we present the AFC results for the time-dependent solid bodyrotation benchmark and a stationary circular convection test. For the formulation ofthe corresponding (initial-)boundary value problems, we refer the reader to [9, 10].In this numerical study, we use the element-based version of (1.6). The station-ary problem is solved using implicit pseudo-time-stepping and a fixed-point iter-ation method [9]. The employed parameter settings and discretization parametersare summarized in the captions. The constrained Galerkin solutions satisfy localmaximum principles if αm = αm(g∗h) is defined by (1.11). To assess the amount ofintrinsic high-order stabilization, we also present the numerical solutions obtainedusing the target scheme (αm = αm(gh) and αm := αm in the unsteady case). The L1
convergence rates for the circular convection test without the discontinuous portionof the inflow profile are shown in Table 1. The AFC scheme based on αm = αm(g∗h)exhibits second-order superconvergence on uniform meshes. The convergence rateson perturbed meshes are comparable to those for αm = αm(gh) and higher than theoptimal order 1.5 for continuous P1 finite element discretizations of (1.1).
h uniform, αm(g∗h) EOC perturbed, αm(g∗h) EOC perturbed, αm(gh) EOC1/32 0.185E-01 0.150E-01 0.141E-011/64 0.511E-02 1.85 0.473E-02 1.67 0.446E-02 1.661/128 0.117E-02 2.14 0.155E-02 1.61 0.133E-02 1.751/256 0.256E-03 2.19 0.499E-03 1.64 0.438E-03 1.60
Table 1.1 Circular convection: L1 convergence history for triangular meshes consisting of 2/h2
cells, P1 approximation, AFC scheme based on (1.11), s = 2, smooth inflow profile.
Acknowledgments: This research was supported by the German Research Associ-ation (DFG) under grant KU 1530/23-1. The author would like to thank ChristophLohmann (TU Dortmund University) for helpful discussions and suggestions.
References
1. R. Abgrall, High order schemes for hyperbolic problems using globally continuous approxi-mation and avoiding mass matrices. J. Sci. Comput. 73 (2017) 461–494.
2. S. Badia and J. Bonilla, Monotonicity-preserving finite element schemes based on differen-tiable nonlinear stabilization. Computer Methods Appl. Mech. Engrg. 313 (2017) 133-158.
3. G. Barrenechea, V. John, P. Knobloch, and R. Rankin, A unified analysis of algebraic fluxcorrection schemes for convection-diffusion equations. SeMA (2018).https://doi.org/10.1007/s40324-018-0160-6
4. G. Barrenechea, V. John, and P. Knobloch, Analysis of algebraic flux correction schemes.SIAM J. Numer. Anal. 54 (2016) 2427–2451.
5. G. Barrenechea, V. John, and P. Knobloch, A linearity preserving algebraic flux correctionscheme satisfying the discrete maximum principle on general meshes. Mathematical Modelsand Methods in Applied Sciences (M3AS) 27 (2017) 525–548.

8 Dmitri Kuzmin
(a) αm(g∗h,s = 5), uh ∈ [0.0,0.992] (b) αm(gh) =: αm, uh ∈ [−0.029,1.08]
Fig. 1.1 Solid body rotation: uniform triangular mesh, 2×1282 P1 elements, AFC scheme basedon (1.11), explicit second-order SSP-RK time-stepping, ∆ t = 10−3, solutions at T = 2π .
(a) αm(g∗h,s = 2), uh ∈ [0.0,1.0] (b) αm(gh), uh ∈ [−0.082.0,1.026]
Fig. 1.2 Circular convection: perturbed triangular mesh, 2×1282 P1 elements, AFC scheme basedon (1.11), backward Euler pseudo-time-stepping, steady-state solutions.
6. S. Gottlieb, C.-W. Shu, and E. Tadmor, Strong stability-preserving high-order time discretiza-tion methods. SIAM Review 43 (2001) 89–112.
7. J.-L. Guermond, M. Nazarov, B. Popov, and Y. Yang, A second-order maximum principle pre-serving Lagrange finite element technique for nonlinear scalar conservation equations. SIAMJ. Numer. Anal. 52 (2014) 2163–2182.
8. A. Jameson, Positive schemes and shock modelling for compressible flows. Int. J. Numer.Meth. Fluids 20 (1995) 743–776.
9. D. Kuzmin, Algebraic flux correction I. Scalar conservation laws. In: D. Kuzmin, R. Lohnerand S. Turek (eds.) Flux-Corrected Transport: Principles, Algorithms, and Applications.Springer, 2nd edition: 145–192 (2012).
10. D. Kuzmin, S. Basting, and J.N. Shadid, Linearity-preserving monotone local projection sta-bilization schemes for continuous finite elements. Computer Methods Appl. Mech. Engrg. 322(2017) 23–41.
11. C. Lohmann, Algebraic flux correction schemes preserving the eigenvalue range of symmetrictensor fields. Ergebnisber. Inst. Angew. Math. 584. TU Dortmund University, 2018.
12. C. Lohmann, D. Kuzmin, J.N. Shadid, and S. Mabuza, Flux-corrected transport algorithms forcontinuous Galerkin methods based on high order Bernstein finite elements. J. Comput. Phys.344 (2017) 151–186.
13. B. Neta and R.T. Williams, Stability and phase speed for various finite element formulationsof the advection equation. Computers & Fluids 14 (1986) 393–410.