Embed Size (px)
Citation preview
1
GNSSGNSS--Based AutoBased Auto--Guidance Guidance Test Program DevelopmentTest Program Development
ECPA (ECPA (SkiathusSkiathus, Greece), Greece)June 6, 2007June 6, 2007
Viacheslav I. AdamchukViacheslav I. Adamchuk Roger M. HoyRoger M. HoyGeorge E. MeyerGeorge E. Meyer Michael F. Michael F. KocherKocher
Biological Systems EngineeringBiological Systems EngineeringUniversity of NebraskaUniversity of Nebraska--LincolnLincoln
BackgroundBackground• Auto-guidance (auto-steering) systems
provide numerous benefits• Performance of different systems
depends on internal and external factors
• Quality of auto-guidance performance must be quantified in repeatable manner
• ASABE has two active projects:– GPS Dynamic Test Standard (X578)– Auto-Guidance Test Standard (X605)
OutlineOutline
• Why do auto-guidance systems perform differently?
• What is “guidance error”?• 2005 auto-guidance field day demo
review• 2006 pilot test of different systems
using Nebraska Tractor Test Laboratory’s test track
• 2007 instrument development and future plans
Agricultural Vehicle GuidanceAgricultural Vehicle Guidance• Reference method
– Local triangulation– Crop-based methods
• Mechanical feelers• Laser row tracking• Machine vision
– GNSS-based guidance• Level of assistance
– Navigation aids• Lightbar parallel tracking
– Auto-guidance• Auto-steering
– Autonomous vehicles• Field robots
GNSSGNSS--Based AutoBased Auto--GuidanceGuidancePositioning
Sensor
DGPS (< 4 in)
RTK (< 1 in)
Terrain Compensation
Gyroscope
Multiple Units
Vehicle Control
Mechanical
Hydroelectric
Popular GPS SolutionsPopular GPS Solutions
• Single Frequency Receivers – WAAS, EGNOS, Beacon– OmniSTAR VBS, John Deere SF1– Subscription/Free (sub-meter accuracy)
• Dual Frequency Receivers – OmniSTAR HP/XP, John Deere SF2– Subscription (decimeter accuracy)
• RTK Receiver– Base Station (centimeter accuracy)

2
AutoAuto--Guidance ApplicabilityGuidance Applicability
• Sub-meter accuracy – 2-4 ft year-to-year– 1 ft pass-to-pass– Mechanical steering
• Decimeter accuracy– 8 in year-to-year– 4 in pass-to-pass– Electro-hydraulic controls
• Centimeter accuracy– 1 in year-to-year– 1 in pass-to-pass– Base station
Tillage/DiskingSpraying/SpreadingHarvestingSeedingMappingPlantingCultivatingBeddingStrip TillingDrip Tape PlacementLand LevelingTopographic Mapping
What does “What does “±±”” actually mean ?actually mean ?
• Nature of the test– Static vs. dynamic
• Duration of the test– Pass-to-pass vs. long-term
• Definition of the test– Precision versus accuracy
• Statistic used– 68% (1σ) vs. 95% (2σ) prediction
• Type of error– Positioning vs. guidance error
Cross-track error
AutoAuto--Guidance ErrorGuidance Error
Guidance Error
Implement Tracking
GPS Positioning
Error
Field Conditions
Vehicle Dynamics
2005 Auto2005 Auto--Guidance Field DayGuidance Field Day
August 18, 2005 – ARDC, Mead, Nebraska
2005 Field Demonstration2005 Field Demonstration
• Pull-type cart
• J-type course
• Coulter marker
• RTK-level GPS position logging
Demonstration CourseDemonstration Course
0
20
40
60
80
0 20 40 60 80 100 120 140 160
Easting, m
Nort
hing
, m
Starting point
Straight pass
Contour pass
Terrace crossing

3
Straight PassStraight Pass
5 0
5 1
5 2
5 3
5 4
5 5
5 6
5 7
5 8
5 9
6 0
4 0 6 0
E a sti n g , m
Nort
hing
, m
5 5
5 6
5 7
5 8
5 9
6 0
6 1
6 2
6 3
6 4
6 5
8 0 1 0 0
E a sti n g , m
Nort
hing
, m
Contour PassContour Pass
20
40
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
Easting, m
Nor
thin
g, m
Error DefinitionError Definition
α
(X1,Y1)
(X2,Y2)
(XA,YA)
ε
L12
LA2
L1A
212
21
22
212
212
1221
212
21
22 2
coscos2LLLLL
LLLLLA
AAAAA
−+=⇒−+= αα
αα 2cos1sin −= 2
212
21
22
212
21
11 21sin ⎟⎟
⎠
⎞⎜⎜⎝
⎛ −+−=⇒=
LLLLLLL
A
AAAA εαε
-25
-20
-15
-10
-5
0
5
10
15
20
25
0.5 1 .5 2 .5 3 .5 4 .5 5 .5
Cros
s-Tr
ack
Err
or, c
m
Curved PathStraight and Level PathStraight and Sloped Path
Error DistributionsError Distributions
Exact backtracking
System 1 System 2 System 3 System 4 System 5
-8
-6
-4
-2
0
2
4
6
8
0 1 2 3 4 5 6 7 8 9 1 0 1 1
Cros
s-tr
ack
Err
or (c
m)
Signed ErrorUnsigned ErrorNormal ModelRayleigh ModelZero ErrorAverage ErrorMedian Absolute ErrorMean Absolute ErrorRMSE
Error DistributionsError Distributions
Signed error distribution Unsigned error distribution
Cumulative DistributionCumulative Distribution
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
-8 -6 -4 -2 0 2 4 6 8
Cross-Track Error, cm
Cum
mul
utiv
e Pr
obab
ility
Signed ErrorUnsigned ErrorNormal ModelRayleigh ModelZero Error95% Threshold

4
ProducerProducer--Viewed DifferencesViewed Differences
• Interface and ease of use• Modes of operation• Installation time and options• Setup and calibration procedure• Cost and possible upgrades• Versatility and secondary use• Technical support
2006 NTTL Track Testing2006 NTTL Track Testing
Trigger
Linear potentiometerReference GPS antennae
Test cart
Two straight parallel passes
RTK Base Station
Linear Potentiometer System (LPS)Linear Potentiometer System (LPS)
Trigger
V R1 Resistor array
washers Common array
washers
Vertical support
Nuts
1.95 cm
Rw Rw Rw Rw Rw Rw
Steel rod
PVC tubing
PVC spacer
2006 Pilot Test2006 Pilot Test
• System A – Centimeter-level accuracy• System B – Decimeter-level accuracy• LPS – based analysis• GPS – based analysis• Straight passes• Three 15-min runs• Two consecutive days• Urban environment• Concrete pavement
Test SequenceTest Sequence
0
25
50
0 25 50 75 100 125 150 175 200 225 250
Easting, m
North
ing,
m
Test Run 1 Test Run 2 Test Run 3 Test Run 4
North – 9 triggers
South – 11 triggers
Spacing – 15.2 m
Swath – 38.1 m
A-B line

5
LPS OutputLPS Output
02468
101214
-39.0
-35.1
-31.2
-27.3
-23.4
-19.5
-15.6
-11.7
-7.8
-3.9 0.0 3.9 7.8
11.715 .6
19.523 .4
27.331.2
35 .139.0
R e la tive p o si tio n , cm
Num
ber o
f occ
uran
ces
N o rth 1N o rth 2N o rth 3S o u th 1S o u th 2S o u th 3
System A
02468
10121416
-39.0
-35.1
-31.2
-27.3
-23.4
-19.5
-15.6
-11.7
-7.8
-3.9 0.0 3.9 7.8
11.715.6
19.523.4
27 .331.2
35.139 .0
R e la tive p o sitio n , cm
Num
ber o
f occ
uran
ces
N o rth 1N o rth 2N o rth 3S o u th 1S o u th 2S o u th 3
System B
Reference GPS OutputReference GPS Output
R2 = 0.95
R2 = 0.95
38.0
38.5
39.0
39.5
40.0
40.5
41.0
41.5
42.0
0 50 100 150 200 250
Easting, m
Nort
hing
(Nor
th p
ass)
, m
2.0
2.5
3.0
3.5
4.0
4.5
5.0
5.5
6.0
North
ing
(Sou
th p
ass)
, m
NorthSouthLinear (South)Linear (North)
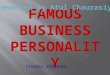
Error DefinitionError Definition• Standard error
– Difference between each trigger hit position and an average (balanced in terms of direction of travel) of all relevant hit positions calculated for each trigger separately (within 15 min for short-term error and all test data for long-term error)
– Standard error of a simple linear regression for the GPS data
• Cross-track error– Expected difference between two tracks randomly
selected from either a short-term or long-term pools of data
– Theoretically, cross-track error equals to standard error multiplied by square root of 2
System A System A –– centimeter accuracycentimeter accuracySystem A - GPS reference (short-term error)
0
1
2
3
4
5
6
7
8
-40 -30 -20 -10 0 10 20 30 40
Guidance error, cm
All dataSouth CW
South CCWSouth all data
North CWNorth CCW
North all data
System A - GPS reference (long-term error)
0
1
2
3
4
5
6
7
8
-40 -30 -20 -10 0 10 20 30 40
Guidance error, cm
All dataSouth CW
South CCWSouth all data
North CWNorth CCW
North all data
System A - LPS reference (short-term error)
0
1
2
3
4
5
6
7
8
-40 -30 -20 -10 0 10 20 30 40
Guidance error, cm
All dataSouth CW
South CCWSouth all data
North CWNorth CCW
North all data
System A - LPS reference (long-term error)
0
1
2
3
4
5
6
7
8
-40 -30 -20 -10 0 10 20 30 40
Guidance error, cm
All dataSouth CW
South CCWSouth all data
North CWNorth CCW
North all data
System B System B –– decimeter accuracydecimeter accuracySystem B - GPS reference (short-term error)
0
1
2
3
4
5
6
7
8
-40 -30 -20 -10 0 10 20 30 40
Guidance error, cm
All dataSouth CW
South CCWSouth all data
North CWNorth CCW
North all data
System B - GPS reference (long-term error)
0
1
2
3
4
5
6
7
8
-40 -30 -20 -10 0 10 20 30 40
Guidance error, cm
All dataSouth CW
South CCWSouth all data
North CWNorth CCW
North all data
System B - LPS reference (short-term error)
0
1
2
3
4
5
6
7
8
-40 -30 -20 -10 0 10 20 30 40
Guidance error, cm
All dataSouth CW
South CCWSouth all data
North CWNorth CCW
North all data
System B - LPS reference (long-term error)
0
1
2
3
4
5
6
7
8
-40 -30 -20 -10 0 10 20 30 40
Guidance error, cm
All dataSouth CW
South CCWSouth all data
North CWNorth CCW
North all data

6
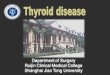
ShortShort--term Error (Passterm Error (Pass--toto--Pass)Pass)Cumulative short-term error distribution
0%
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
Error, cm
System A (LPS)System A (GPS)System B (LPS)System B (GPS)
95% probability
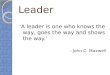
LongLong--term Error (Dayterm Error (Day--toto--Day)Day)Cumulative long-term error distribution
0%
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
Error, cm
System A (LPS)System A (GPS)System B (LPS)System B (GPS)S t A GPS (95%)
95% probability
Standard Related Discussion ItemsStandard Related Discussion Items
• Test location– Surface conditions– Clarity of sky– Test course segments
• Method of measurement– Reference receiver– Total station– Mechanical (contact)
sensor– Optical (non-contact)
sensor
• Test sequence– PDOP requirements– Pass-to-pass test– Day-to-day test
• Error terms– Dealing with bias– Parametric and non-
parametric estimates• Machinery selection
– Tractors– Sprayers
Sensor calibration
Optical Sensor DevelopmentOptical Sensor DevelopmentVideo camera with internal processor
Direct hard mounting to the tractor’s chassis
Locating the center of a painted line to within 2 mm
2007 Test Plans2007 Test Plans• Measurement close to the drawbar pivoting
point• Three 15-min test run sequences repeated
three times• Actual cross-track error calculation• Non-parametric statistics only• Three test segments
– Linear flat– Curved flat– Curved sloped
• Line acquisition test trial http://bse.unl.edu/adamchukE:mail: [email protected]