Embed Size (px)
Citation preview

J. Appl. Math. Comput.DOI 10.1007/s12190-014-0762-9
ORIGINAL RESEARCH
Global dynamics of a delayed predator–prey modelwith stage structure and holling type II functionalresponse
Lingshu Wang · Rui Xu · Guanghui Feng
Received: 2 January 2014© Korean Society for Computational and Applied Mathematics 2014
Abstract The global properties of a delayed predator-prey model with Holling typeII functional response and stage structure for both the predator and the prey are inves-tigated. By analyzing the corresponding characteristic equations, the local stability ofeach of feasible equilibria of the model is discussed. Further, it is proved that the modelundergoes a Hopf bifurcation at the coexistence equilibrium. By means of the persis-tence theory on infinite dimensional systems, it is shown that the model is permanentif the coexistence equilibrium exists. By using Lyapunov functions and the LaSalleinvariant principle, it is shown that the trivial equilibrium is globally asymptoticallystable when the predator-extinction equilibrium is not feasible, the predator-extinctionequilibrium is globally asymptotically stable when the coexistence equilibrium is notfeasible, and sufficient conditions are derived for the global stability of the coexistenceequilibrium. Numerical simulations are carried out to illustrate the main results.
Keywords Stage structure · Time delay · Hopf bifurcation · LaSalle invariantprinciple · Global stability
Mathematics Subject Classification 34K18 · 34K20 · 34K60 · 92D25
1 Introduction
Predator–prey models are important in the modelling of multi-species interactionsand have received great attention among theoretical and mathematical biologists (see,
L. WangSchool of Mathematics and Statistics, Hebei University of Economics & Business,Shijiazhuang 050061, People’s Republic of China
R. Xu · G. Feng (B)Institute of Applied Mathematics, Shijiazhuang Mechanical Engineering College,Shijiazhuang 050003, People’s Republic of Chinae-mail: [email protected]
123

L. Wang et al.
for example, [4,9–17]). It is assumed in the classical predator–prey models that eachindividual predator admits the same ability to feed on prey or each individuals preyadmits the same risk to be attacked by predators. This assumption seems not to berealistic for many animals. In the natural world, there are many species whose indi-viduals pass though an immature stage during which they are raised by their parents,and the reproductive rate during this stage can be ignored. Stage-structure is a naturalphenomenon and represents, for example, the division of a population into immatureand mature individuals. Stage-structured models have received great attention in thelast two decades (see, for example [1,4,10–17]).
In [11], Wang proposed a predator–prey model with Holling type-II functionalresponse and stage structure under the assumptions that the predator is divided intotwo groups, one immature and the other mature, and that only mature predators canattack prey and have reproductive ability, while immature predators do not attackprey and have no reproductive ability. He considered the following stage-structuredpredator–prey model:
⎧⎪⎪⎨
⎪⎪⎩
x(t) = r x(t) − ax2(t) − a1x(t)y2(t)1+mx(t)
y1(t) = a2x(t)y2(t)1+mx(t) − (r1 + d1)y1(t)
y2(t) = r1 y1(t) − d2 y2(t)
(1.1)
where x(t) represents the density of the prey at time t , y1(t) and y2(t) representthe densities of the immature and the mature predator at time t , respectively; theparameters a, a1, a2, d1, d2, r and r1 are positive constants; x/(1 + mx) is the Hollingtype-II response function of the mature predator. In [11], Wang systematically studiedmodel (1.1) and obtained the boundedness, permanence, existence of an orbitallyasymptotically stable periodic solution and the global stability of a positive equilibriumby using the general Lyapunov function.
Time delays of one type or another have been incorporated into biological modelsby many researchers (see, for example, [1–3,7,9,11–17]). In general, delay differ-ential equations exhibit much more complicated dynamics than ordinary differentialequations since a time delay could cause a stable equilibrium to become unstable andcause the population to fluctuate. Therefore, more realistic models of population inter-actions should take into account the effect of time delays. Time delay due to gestationis a common example, because generally the consumption of prey by the predatorthroughout its past history governs the present birth rate of the predator. In [15], Xuincorporated a time delay due to the gestation of mature predator into model (1.1).Sufficient conditions were derived in [15] for the global stability of a coexistenceequilibrium by using Lyapunov functionals and the LaSalle invariant principle.
Most of the researchers consider models with stage structure only for one species(see, for example, [10–17]). However, it is of importance to discuss the effects ofstage structure for both the predator and the prey species. Based on above discussions,in this paper, we incorporate stage structure for the prey and time delay due to thegestation of mature predator into model (1.1). To this end, we study the followingdelayed differential equations
123

Global dynamics of a delayed predator–prey model
⎧⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎩
x1(t) = r x2(t) − (d1 + r1)x1(t)
x2(t) = r1x1(t) − d2x2(t) − ax22 (t) − a1x2(t)y2(t)
1+mx2(t)
y1(t) = a2x2(t−τ)y2(t−τ)1+mx2(t−τ)
− (d3 + r2)y1(t)
y2(t) = r2 y1(t) − d4 y2(t)
(1.2)
where x1(t) and x2(t) represent the densities of the immature and the mature prey attime t , respectively; y1(t) and y2(t) represent the densities of the immature and themature predator at time t , respectively. The parameters a, a1, a2, d1, d2, d3, d4, r , r1and r2 are positive constants, in which r is the birth rate of the prey; a is the intra-specific competition rate of the mature prey; d1, d2, d3 and d4 are the death rates of theimmature prey, mature prey, immature predator and mature predator, respectively; r1and r2 are the transformation rates from the immature individuals to mature individualsfor the prey and the predator, respectively; a1 is the capturing rate of the predator, a2/a1is the conversion rate of nutrients into the reproduction of the predator; τ ≥ 0 is aconstant delay due to the gestation of the predator. It is assumed in (1.2) that the matureindividual predators feed on mature prey and have the ability to reproduce.
The initial conditions for model (1.2) take the form
x1(θ) = φ1(θ) ≥ 0, x2(θ) = φ2(θ) ≥ 0,
y1(θ) = ϕ1(θ) ≥ 0, y2(θ) = ϕ2(θ) ≥ 0, θ ∈ [−τ, 0),
φ1(0) > 0, φ2(0) > 0, ϕ1(0) > 0,
ϕ2(0) > 0, (φ1(θ), φ2(θ), ϕ1(θ), ϕ2(θ)) ∈ C([−τ, 0], R4+0),
(1.3)
where R4+0 = {(x1, x2, x3, x4) : xi ≥ 0, i = 1, 2, 3, 4}.It is well known by fundamental theory of functional differential equations [5],
model (1.2) has a unique solution (x1(t), x2(t), y1(t), y2(t)) satisfying initial con-ditions (1.3). It is easy to show that all solutions of (1.2) corresponding to initialconditions (1.3) are defined on [0,+∞] and remain positive for all t ≥ 0.
The organization of this paper is as follows. In the next section,we investigate thelocal stability of each of feasible equilibria of (1.2). The existence of a Hopf bifurcationat the coexistence equilibrium is studied. In Sect. 3, by means of the persistence theoryon infinite dimensional systems, we prove that model (1.2) is permanent when the coex-istence equilibrium exists. In Sect. 4, by using Lyapunov functionals and the LaSalleinvariant principle, we show that the trivial equilibrium is globally asymptotically sta-ble when the predator-extinction equilibrium is not feasible, the predator-extinctionequilibrium is globally asymptotically stable when the coexistence equilibrium doesnot exist, and sufficient conditions are obtained for the global asymptotic stability ofthe coexistence equilibrium of (1.2). A brief discussion is given in Sect. 5 to concludethis work.
2 Local stability and Hopf bifurcation
In this section, we discuss the local stability of each of feasible equilibria of model(1.2) and the existence of Hopf bifurcations at the coexistence equilibrium.
123

L. Wang et al.
Model (1.2) always has a trivial equilibrium E0(0, 0, 0, 0). It is easy to showthat if rr1 > d2(r1 + d1), model (1.2) admits a predator-extinction equilibriumE1(x0
1 , x02 , 0, 0), where
x01 = r [rr1 − d2(r1 + d1)]
a(r1 + d1)2 , x02 = rr1 − d2(r1 + d1)
a(r1 + d1).
Further, if the following holds,
(H1)rr1 − d2(r1 + d1)
a(r1 + d1)>
d4(r2 + d3)
a2r2 − md4(r2 + d3)> 0,
then model (1.2) has a unique coexistence equilibrium E∗(x∗1 , x∗
2 , y∗1 , y∗
2 ), where
x∗1 = r
r1 + d1x∗
2 , x∗2 = d4(r2 + d3)
a2r2 − md4(r2 + d3),
y∗1 = a2x∗
2 [rr1 − d2(r1 + d1) − a(r1 + d1)x∗2 ]
a1(r1 + d1)(r2 + d3), y∗
2 = r2
d4y∗
1 .
The characteristic equation of model (1.2) at the equilibrium E0(0, 0, 0, 0) is of theform
[λ2 + (r1 + d1 + d2)λ + d2(r1 + d1) − rr1][λ2 + (r2 + d3 + d4)λ + d4(r2 + d3)] = 0. (2.1)
It is easy to show that if rr1 < d2(r1 + d1), then the equilibrium E0 is locally asymp-totically stable; if rr1 > d2(r1 + d1), and then E0 is unstable.
The characteristic equation of model (1.2) at the equilibrium E1(x01 , x0
2 , 0, 0) is ofthe form
[λ2 + (r1 + d1 + d2 + 2ax02 )λ + rr1 − d2(r1 + d1)]
[
λ2 + (r2 + d3 + d4)λ + d4(r2 + d3) − a2r2x02
1 + mx02
e−λτ
]
= 0. (2.2)
If rr1 > d2(r1 + d1), it is readily seen from (2.2) that the equation
λ2 + (r1 + d1 + d2 + 2ax02 )λ + rr1 − d2(r1 + d1) = 0
always has two negative real roots. All other roots are given by the following equation
λ2 + (r2 + d3 + d4)λ + d4(r2 + d3) − a2r2x02
1 + mx02
e−λτ = 0. (2.3)
Let f (λ) = λ2 + (r2 + d3 + d4)λ + d4(r2 + d3) − a2r2x02/(1 + mx0
2 )e−λτ . If (H1)
holds, then it is easy to see that for λ real,
123

Global dynamics of a delayed predator–prey model
f (0) = d4(r2 + d3) − a2r2 < 0, limx→+∞ f (x) = +∞.
Hence, f (λ) = 0 has at least one positive real root. Therefore, if (H1) holds, theequilibrium E1 is unstable. If 0 < [rr1 − d2(r1 + d1)]/[a(r1 + d1)] < d4(r2 +d3)/[a2r2−md4(r2+d3)], it is readily seen from (2.2) that E1 is locally asymptoticallystable when τ = 0. In this case, it is easy to show that
(r2 + d3 + d4)2 − 2d4(r2 + d3) > 0, [d4(r2 + d3)]2 − (a2r2x0
2 )2
(1 + mx02 )2
> 0.
By Theorem 3.4.1 in Kuang [8], we see that if 0 < [rr1 −d2(r1 +d1)]/[a(r1 +d1)] <
d4(r2 + d3)/[a2r2 − md4(r2 + d3)], E1 is locally asymptotically stable for all τ ≥ 0.The characteristic equation of model (1.2) at the equilibrium E∗(x∗
1 , x∗2 , y∗
1 , y∗2 )
takes the form
λ4 + p3λ3 + p2λ
2 + p1λ + p0 + (q2λ2 + q1λ + q0)e
−λτ = 0, (2.4)
where
p3 = r1 + d1 + r2 + d3 + d4 + α,
p2 = d4(r2 + d3) + (r1 + d1 + α)(r2 + d3 + d4) + α(r1 + d1) − rr1,
p1 = d4(r2 + d3)(r1 + d1 + α) + (r2 + d3 + d4)[α(r1 + d1) − rr1],p0 = d4(r2 + d3)[α(r1 + d1) − rr1],q2 = −d4(r2 + d3),
q1 = d4(r2 + d3)
[a1 y∗
2
(1 + mx∗2 )2 − (r1 + d1) − α
]
,
q0 = d4(r2 + d3)
[a1(r1 + d1)y∗
2
(1 + mx∗2 )2 + rr1 − α(r1 + d1)
]
,
α = d2 + 2ax∗2 + a1 y∗
2
(1 + mx∗2 )2 .
When τ = 0, Eq. (2.4) becomes
λ4 + p3λ3 + (p2 + q2)λ + p0 + q0 = 0. (2.5)
It is easy to show that
p3 > 0, p3(p2 + q2) − (p1 + q1) > 0.
If the following holds
(H2)(p1 + q1)[p3(p2 + q2) − (p1 + q1)] > p23(p0 + q0),
then, by the Routh–Hurwitz theorem, the equilibrium E∗ of (1.2) is locally asymptot-ically stable when τ = 0, and E∗ is unstable if the inequality in (H2) is reversed.
123

L. Wang et al.
If iω(ω > 0) is a solution of (2.4), separating real and imaginary parts, we have
(q2ω2 − q0) sin ωτ + q1ω cos ωτ = p3ω
3 − p1ω,
(q2ω2 − q0) cos ωτ − q1ω sin ωτ = ω4 − p2ω
2 + p0.(2.6)
Squaring and adding the two equations of (2.6), it follows that
ω8 + h3ω6 + h2ω
4 + h1ω2 + p2
0 − q20 = 0, (2.7)
where
h3 = p23 − 2p2, h2 = p2
2 + 2p0 − q22 − 2p1 p3, h1 = p2
1 + 2q0q2 − q21 − 2p0 p2.
A direct calculation shows that
h3 = α2 + (r1 + d1)2 + (r2 + d3)
2 + d24 + 2rr1 > 0,
h2 = [(α(r1 + d1) − rr1]2 + [α2 + (r1 + d1)2 + 2rr1][(r2 + d3)
2 + d24 ] > 0,
h1 = [α(r1 + d1) − rr1]2[d24 + (r2 + d3)
2] +
[d4(r2 + d3)]2 a1 y∗2
(1 + mx∗2 )2
[
2d2 + 4ax∗2 + a1 y∗
2
(1 + mx∗2 )2
]
> 0.
If the following holds:
(H3)rr1 − d2(r1 + d1)
a(r1 + d1)<
d4(r2 + d3)
a2r2 − md4(r2 + d3)
[
2 + a2r2 − md4(r2 + d3)
a2r2 + md4(r2 + d3)
]
,
we have p20 − q2
0 > 0. Hence, (2.7) has no positive real roots. Accordingly, if (H1),(H2) and (H3) hold, then the equilibrium E∗ is locally asymptotically stable for allτ ≥ 0. If the inequality in (H3) is reversed, then (2.7) has a unique positive root ω0,that is, (2.4) admits a pair of purely imaginary roots of the form ±ω0. Denote
τ k0 = 1
ω0arccos
q1ω2(p3ω
2 − p1) + (q2ω2 − q0)(ω
4 − p2ω2 + p0)
(q1ω)2 + (q2ω2 − q0)2 + 2kπ
ω0,
k = 0, 1, 2 · · · (2.8)
Noting that if (H2) holds, E∗ is locally stable when τ = 0, by the general theoryon characteristic equation of delay differential equation from [8] (Theorem 4.1), E∗remains stable for τ < τ0, where τ0 = τ 0
0 .We now claim that
d(Re(λ))
dτ
∣∣∣∣τ=τ0
> 0.
123

Global dynamics of a delayed predator–prey model
This will signify that there exists at least one eigenvalue with positive real part forτ > τ0. Moreover, the conditions for the existence of a Hopf bifurcation are thensatisfied yielding a periodic solution. To this end, differentiating equation (2.4) withrespect τ , it follows that
[(4λ3 + 3p3λ2 + 2p2λ + p1) + (2q2λ + q1)e
−λτ − τ(q2λ2 + q1λ + q0)e
−λτ ]dλ
dτ
= λ(q2λ2 + q1λ + q0)e
−λτ .
From this equation, we can obtain
(dλ
dτ
)−1
= 4λ3 + 3p3λ2 + 2p2λ + p1
−λ(λ4 + p3λ3 + p2λ2 + p1λ + p0)+ 2q2λ + q1
λ(q2λ2 + q1λ + q0)− τ
λ.
Hence, we derive that
sgn
{d(Reλ)
dτ
}
λ=iω0
= sgn
{
Re
(dλ
dτ
)−1}
λ=iω0
= sgn
{
Re
[4λ3 + 3p3λ
2 + 2p2λ + p1
−λ(λ4 + p3λ3 + p2λ2 + p1λ + p0)+ 2q2λ + q1
λ(q2λ2 + q1λ + q0)
]
λ=iω0
}
= sgn
{2(2ω2
0 − p2)(ω40 − p2ω
40 + p0) + (3p3ω
20 − p1)(p3ω
20 − p1)
(ω40 − p2ω
20 + p0)2 + ω2
0(p3ω20 − p1)2
+ −q21 − 2q2(q2ω
20 − q0)
(q2ω20 − q0)2 + (q1ω0)2
}
.
Note that (ω40 − p2ω
20 + p0)
2 + ω20(p3ω
20 − p1)
2 = (q2ω20 − q0)
2 + (q1ω0)2, then
sgn
{d(Reλ)
dτ
}
λ=iω0
= sgn
{4ω6
0 + 3h3ω40 + 2h2ω
20 + h1
(q2ω20 − q0)2 + (q1ω0)2
}
> 0.
Therefore, the transversal condition holds and a Hopf bifurcation occurs at τ =τ0, ω = ω0.
We conclude the discussions above as follows.
Theorem 2.1 For model (1.2), we have the following:
(i) If rr1 < d2(r1 +d1), then the equilibrium E0(0, 0, 0, 0) is locally asymptoticallystable; if rr1 > d2(r1 + d1), and then E0 is unstable.
(ii) If 0 <rr1−d2(r1+d1)
a(r1+d1)<
d4(r2+d3)a2r2−md4(r2+d3)
, then the equilibrium E1(x01 , x0
2 , 0, 0) is
locally asymptotically stable; if rr1−d2(r1+d1)a(r1+d1)
>d4(r2+d3)
a2r2−md4(r2+d3)> 0, and then
E1 is unstable;
123

L. Wang et al.
0 50 100 150 200 2500
0.5
1
1.5
time t
solu
tion
(a)x
1(t)
x2(t)
y1(t)
y2(t)
0 100 200 300 400 500 6000
0.5
1
1.5
2
2.5
time t
solu
tion
(b)x
1(t)
x2(t)
y1(t)
y2(t)
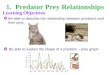
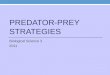
Fig. 1 The temporal solution found by numerical integration of system (1.2) with a τ = 1, b τ = 3.6;(φ1, φ2, ϕ1, ϕ2) = (0.5, 0.5, 0.5, 0.5)
(iii) Let (H2) hold. If 0 <d4(r2+d3)
a2r2−md4(r2+d3)<
rr1−d2(r1+d1)a(r1+d1)
<d4(r2+d3)
a2r2−md4(r2+d3)[2 +
a2r2−md4(r2+d3)a2r2+md4(r2+d3)
], then the equilibrium E∗ is locally asymptotically stable for all
τ ≥ 0; if rr1−d2(r1+d1)a(r1+d1)
>d4(r2+d3)
a2r2−md4(r2+d3)
[2 + a2r2−md4(r2+d3)
a2r2+md4(r2+d3)
], then there exists
a positive number τ0, such that the equilibrium E∗ is locally asymptotically stableif 0 < τ < τ0 and unstable if τ > τ0. Further, system (1.2) undergoes a Hopfbifurcation at E∗ when τ = τ0.
We now give an example to illustrate the main results in Theorem 2.1.
Example 1 In (1.2), let a = 16, a1 = 5, a2 = 3, d1 = d2 = d3 = d41/8, r = 5,r1 = r2 = 1, m = 1/10. It is easy to show that system (1.2) has a unique coexistenceequilibrium E∗(0.2093, 0.0471, 0.0896, 0.7165). By calculation, we have p2
0 − q20 ≈
−0.1844 < 0, (p1 + q1)[p3(p2 + q2) − (p1 + q1)] − p23(p0 + q0) ≈ 66.6464,
τ0 ≈ 3.5114. By Theorem 2.1, E∗ is locally asymptotically stable if 0 < τ < τ0and is unstable if τ > τ0, and system (1.2) undergoes a Hopf bifurcation at E∗ whenτ = τ0. Numerical simulation illustrates this fact(see Fig. 1).
3 Permanence
In this section, we are concerned with the permanence of model (1.2).
Lemma 3.1 There are positive constants M1 and M2, such that for any positive solu-tion (x1(t), x2(t), y1(t), y2(t)) of model (1.2),
limt→+∞ xi (t) < M1, lim
t→+∞ yi (t) < M2, i = 1, 2 (3.1)
i.e. positive solutions of (1.2) are uniformly bounded.
Proof Let (x1(t), x2(t), y1(t), y2(t)) be any positive solution of model (1.2) withinitial conditions (1.3). Define
V (t) = x1(t − τ) + x2(t − τ) + a1
a2[y1(t) + y2(t)].
123

Global dynamics of a delayed predator–prey model
Calculating the derivative of V (t) along positive solutions of (1.2), it follows that
V (t) = r x2(t − τ)−d1x1(t−τ) − d2x2(t − τ)−ax22 (t − τ)− a1
a2[d3 y1(t)+d4 y2(t)]
≤ −dV (t) − a(x2(t − τ) − r2a )2 + r2
4a
≤ −dV (t) + r2
4a ,
where d = min{d1, d2, d3, d4}, which yields lim supt→+∞ V (t) ≤ r2
4ad. Taking M1 =
r2/(4ad), M2 = a2r2/(4ada1), then (3.1) follows.
In order to study the permanence of model (1.2), we refer to the persistence theoryon infinite dimensional systems developed by Hale and Waltman in [6].
Let X be a complete metric space with metric d. Suppose that T is a continuoussemiflow on X , i.e. T : [0,+∞] × X → X is a continuous map with the followingproperties:
Tt ◦ Ts = Tt+s, t, s ≥ 0, T0(x) = x, x ∈ X,
where Tt denotes the mapping from X to X given by Tt (x) = T (t, x). The distanced(x, Y ) of a point x ∈ X from a subset Y of X is defined by d(x, Y ) = in fy∈Y d(x, y).Recall that the positive orbit γ +(x) = ⋃
t≥0{T (t)x}, and its ω− limit set is ω(x) =⋂
s≥0¯⋃
t≥s{T (t)x}. Define W s(A), the strong stable set of a compact invariant set A,to be W s(A) = {x : x ∈ X, ω(x) �= ∅, ω(x) ⊂ A}.
(A1) Assume that X0 is open and dense in X and X0 ⋃X0 = X, X0 ⋂
X0 = ∅.Moreover, the C0 semigroup T (t) on X satisfies
T (t) : X0 → X0, T (t) : X0 → X0.
Let Tb(t) = T (t) |x0 and Ab be the global attractor for Tb(t). Define Ab =⋃x∈Ab
ω(x).
Lemma 3.2 (Hale and Waltman [6]) Suppose that T (t) satisfies (A1) and the follow-ing conditions:
(i) There is a t0 ≥ 0 such that T (t) is compact for t > t0;(ii) T(t) is point dissipative in X;
(iii) Ab is isolated and has an acyclic covering M, where M = {M1, M2, · · · , Mn};(iv) W s(Mi )
⋂X0 = ∅ for i = 1, 2, · · · , n.
Then X0 is a uniform repeller with respect to X0, that is, there is an ε > 0 such thatfor any x ∈ X0, lim inf t→+∞ d(T (t)x, X0) ≥ ε.
We are now able to state and prove the result on the permanence of model (1.2).
Theorem 3.1 If (H1) holds, then model (1.2) is permanent.
123

L. Wang et al.
Proof We need only to show that the boundaries of R4+0 repel positive solutions ofmodel (1.2) uniformly. Let C+([−τ, 0], R4+0) denote the space of continuous functionsmapping [−τ, 0] into R4+0. Define
C1 = {(φ1, φ2, ϕ1, ϕ2) ∈ C+([−τ, 0], R4+0) : φi (θ) ≡ 0, θ ∈ [−τ, 0], i = 1, 2},C2 = {(φ1, φ2, ϕ1, ϕ2) ∈ C+([−τ, 0], R4+0) : φi (θ) > 0, ϕi (θ) ≡ 0, θ ∈ [−τ, 0],
i = 1, 2}.
Denote C0 = C1⋃
C2, X = C+([−τ, 0], R4+0) and C0 = intC+([−τ, 0], R4+0).
In the following, we show that the condition of C0 and Lemma 3.2 are satisfied. Bythe definition of C0 and C0, it is easy to see that C0 and C0 are positively invariant.Moreover, the conditions (i) and (i i) in Lemma 3.2 are clearly satisfied. Thus, weneed only to show that the conditions (i i i) and (iv) hold. Clearly, corresponding toxi = yi = 0 and x1(t) = x0
1 , x2(t) = x02 , yi (t) = 0, respectively, there are two
constant solutions in C0 : E0 ∈ C1, E1 ∈ C2 satisfying
E0 = {(φ1, φ2, ϕ1, ϕ2) ∈ C+([−τ, 0], R4+0) : φi (θ) ≡ 0, ϕi (θ) ≡ 0, θ ∈ [−τ, 0]},E1 = {(φ1, φ2, ϕ1, ϕ2) ∈ C+([−τ, 0], R4+0) : φ1(θ) = x0
1 , φ2(θ) = x02 , ϕi (θ) ≡ 0,
θ ∈ [−τ, 0]}.
We now verify the condition (i i i) of Lemma 3.2. If (x1(t), x2(t), y1(t), y2(t)) isa solution of (1.2) initiating from C1, then y1(t) = −(d3 + r2)y1(t), y2(t) =r2 y1(t) − d4 y2(t). If rr1 > d2(r1 + d1), then y1(t) → 0, y2(t) → 0 as t → +∞. If(x1(t), x2(t), y1(t), y2(t)) is a solution of (1.2) initiating from C2 with φi (0) > 0,then it follows from the first and second equations of model (1.2) that x1(t) =r x2(t)−(r1 +d1)x1(t), x2(t) = r1x1(t)−d2x2(t)−ax2
2 (t), which yields x1(t) → x01 ,
x2(t) → x02 as t → +∞. Noting that C1
⋂C2 = ∅, we see that the invariant sets E0
and E1 are isolated. Hence, {E0, E1} is isolated and is an acyclic covering satisfyingthe condition (i i i) in Lemma 3.2.
We now verify that W s(E0)⋂
C0 = ∅ and W s(E1)⋂
C0 = ∅. Here, we onlyprove the second equation since the proof of the first equation is simple. AssumeW s(E1)
⋂C0 = ∅. Then there is a positive solution (x1(t), x2(t), y1(t), y2(t)) sat-
isfying
limt→+∞(x1(t), x2(t), y1(t), y2(t)) = (x0
1 , x02 , 0, 0).
Since (H1) holds, we can choose ε > 0 sufficiently small, such that
a2r2(x02 − ε)
1 + m(x02 − ε)
> d4(r2 + d3). (3.2)
Since limt→+∞ x2(t) = x02 , for ε > 0 sufficiently small satisfying (3.2), there is a
t0 > 0 such that, if t > t0, x2(t) > x02 − ε. For ε > 0 sufficiently small satisfying
(3.2), it follows from the third and the fourth equations of (1.2) that, for t > t0 + τ ,
123

Global dynamics of a delayed predator–prey model
y1(t) ≥ a2(x02 − ε)
1 + m(x02 − ε)
y2(t − τ) − (r2 + d3)y1(t),
y2(t) = r2 y1(t) − d4 y2(t).
Define
Aε =⎛
⎝−(r2 + d3)
a2(x02−ε)
1+m(x02−ε)
r2 − d4
⎞
⎠
Since Aε has positive off-diagonal elements, by the Perron-Frobenius theorem, thereis a positive eigenvector η for the maximum eigenvalue α of Aε . Noting that (3.2)holds, a direct calculation shows that α > 0. Using a similar argument as that in theproof of Theorem 2.1 in [11], one can show that limt→+∞ yi (t) = +∞(i = 1, 2).This contradicts Lemma 3.1. Hence, we have W s(E1)
⋂C0 = ∅. By Lemma 3.2, we
conclude that C0 repels positive solutions of model (1.2) uniformly. Therefore, model(1.2) is permanent.
4 Global stability
In this section, we are concerned with the global stability of the trivial equilibriumE0, the predator-extinction equilibrium E1 and the coexistence equilibrium E∗ ofmodel (1.2), respectively. The strategy of proofs is to use Lyapunov functionals andthe LaSalle invariant principle.
Theorem 4.1 If rr1 < d2(r1+d1), then the trivial equilibrium E0(0, 0, 0, 0) of model(1.2) is globally asymptotically stable.
Proof Let (x1(t), x2(t), y1(t), y2(t)) be any positive solution of model (1.2) withinitial conditions (1.3). Define
V1(t) = r1
r1 + d1x1(t)+x2(t)+ a1
a2y1(t)+ a1(r2 + d3)
a2r2y2(t) + a1
t∫
t−τ
x2(s)y2(s)
1 + mx2(s)ds.
Calculating the derivative of V1(t) along positive solutions of model (1.2), it followsthat
d
dtV1(t) = r1
r1 + d1x1(t) + x2(t) + a1
a2y1(t) + a1(r2 + d3)
a2r2y2(t) + a1x2(t)y2(t)
1 + mx2(t)
− a1x2(t − τ)y2(t − τ)
1 + mx2(t − τ)
=( rr1
r1 + d1− d2
)x2(t) − ax2
2 (t) − a1d4(r2 + d3)
a2r2y2(t). (4.1)
If rr1 < d2(r1 + d1), it then follows from (4.1) that V1(t) ≤ 0. By Theorem 5.3.1in [5], solutions limit to M , the largest invariant subset of {V1(t) = 0}. Clearly, we
123

L. Wang et al.
see from (4.1) that V1(t) = 0 if and only if x2(t) = 0, y2(t) = 0. Noting that M isinvariant, for each element in M , we have x2(t) = 0, y2(t) = 0. It therefore followsfrom the first and third equations of (1.2) that
0 = x1(t) = −(r1 + d1)x1(t), 0 = y1(t) = −(r2 + d3)y1(t),
which yields x1(t) = 0, y1(t) = 0. Hence, V1(t) = 0 if and only if (x1(t), x2(t), y1(t),y2(t)) = (0, 0, 0, 0). Accordingly, the global asymptotic stability of E0 follows fromLaSalle’s invariant principle. Theorem 4.2 If 0 <
rr1−d2(r1+d1)a(r1+d1)
<d4(r2+d3)
a2r2−md4(r2+d3), then the predator-extinction
equilibrium E1(x01 , x0
2 , 0, 0) of model (1.2) is globally asymptotically stable.
Proof Assume that (x1(t), x2(t), y1(t), y2(t)) is any positive solution of model (1.2)with initial conditions (1.3). Model (1.2) can be rewritten as
x1(t) = r
x01
[− x2(t)
(x1(t) − x0
1
)+ x1(t)
(x2(t) − x0
2
)],
x2(t) = r1
x02
[− x1(t)
(x2(t) − x0
2
)+ x2(t)
(x1(t) − x0
1
)]
+ x2(t)[
− a(
x2(t) − x02
)]− a1x2(t)y2(t)
1 + mx2(t),
y1(t) = a2x2(t − τ)y2(t − τ)
1 + mx2(t − τ)− (r2 + d3)y1(t),
y2(t) = r2 y1(t) − d4 y2(t). (4.2)
Define
V21(t) = c1
(
x1 − x01 − x0
1 lnx1
x01
)
+ x2 − x02 − x0
2 lnx2
x02
+ c2 y1 + c3 y2,
where c1 = r1x01/(r x0
2 ), c2 = a1(1 + mx02 )/a2, c3 = (r2 + d3)c2/r2. Calculating the
derivative of V21(t) along positive solutions of (1.2), it follows that
V21(t) = r1(x1(t) − x01 )
x02 x1(t)
[− x2(t)
(x1(t) − x0
1
)+ x1(t)
(x2(t) − x0
2
)]
+r1
(x2(t)−x0
2
)
x02 x2(t)
[− x1(t)
(x2(t)−x0
2
)+ x2(t)
(x1(t)−x0
1
)]− a
(x2(t)−x0
2
)2
− a1 y2(t)
1 + mx2(t)
(x2(t) − x0
2
)+ a2c2x2(t − τ)y2(t − τ)
1 + mx2(t − τ)− c3d4 y2(t)
123

Global dynamics of a delayed predator–prey model
= − r1
x02
[√x2(t)
x1(t)
(x1(t) − x0
1
)−
√x1(t)
x2(t)
(x2(t) − x0
2
)]2
− a(
x2(t) − x02
)2
− a1
(1 + mx0
2
) x2(t)y2(t)
1 + mx2(t)+ a2c2x2(t − τ)y2(t − τ)
1 + mx2(t − τ)+
(a1x0
2 − c3d4
)y2(t).
(4.3)
Define
V2(t) = V21(t) + a2c2
t∫
t−τ
x2(s)y2(s)
1 + mx2(s)ds. (4.4)
We derive from (4.3) and (4.4) that
V1(t) = − r1
x02
[√x2(t)
x1(t)
(x1(t) − x0
1
)−
√x1(t)
x2(t)
(x2(t) − x0
2
)]2
− a(
x2(t) − x02
)2
+(
a1x02 − c3d4
)y2(t). (4.5)
If a1x02 < c3d4, i.e. 0 <
rr1−d2(r1+d1)a(r1+d1)
<d4(r2+d3)
a2r2−md4(r2+d3), it then follows from (4.5)
that V2(t) ≤ 0. By Theorem 5.3.1 in [5], solutions limit to M , the largest invariantsubset of {V2(t) = 0}. Clearly, we see from (4.5) that V2(t) = 0 with equality ifonly if x1 = x0
1 , x2 = x02 , y2 = 0. It follows from the fourth equation of (1.2) that
0 = y1(t) = −(r2 + d3)y1(t), which yields y1 = 0. Using the LaSalle’s invariantprinciple, the global asymptotic stability of E1 follows.
Theorem 4.3 Let (H1) hold. Then the coexistence equilibrium E∗(x∗1 , x∗
2 , y∗1 , y∗
2 ) ofmodel (1.2) is globally asymptotically stable provided that
(H4) x2 >rr1−d2(r1+d1)
a(r1+d1)− d4(r2+d3)
a2r2−md4(r2+d3), here x2 is the persistency constant for
x2 satisfying lim inf t→∞ x2(t) ≥ x2.
Proof Let (x1(t), x2(t), y1(t), y2(t)) be any positive solution of model (1.2) withinitial conditions (1.3). Model (1.2) can be rewritten as
x1(t) = r
x∗1[−x2(t)(x1(t) − x∗
1 ) + x1(t)(x2(t) − x∗2 )],
x2(t) = r1
x∗2[−x1(t)(x2(t) − x∗
2 ) + x2(t)(x1(t) − x∗1 )] + x2(t)[−a(x2(t) − x∗
2 )]
+ a1 y∗2
1 + mx∗2
x2(t) − a1x2(t)y2(t)
1 + mx2(t),
y1(t) = a2x2(t − τ)y2(t − τ)
1 + mx2(t − τ)− (r2 + d3)y1(t),
y2(t) = r2 y1(t) − d4 y2(t). (4.6)
123

L. Wang et al.
Define
V31(t) = k1(x1 − x∗1 − x∗
1 ln x1x∗
1) + x2 − x∗
2 − x∗2 ln x2
x∗2
+ k2(y1 − y∗1 − y∗
1 ln y1y∗
1)
+k3(y2 − y∗2 − y∗
2 ln y2y∗
2),
where k1 = r1x∗1/(r x∗
2 ), k2 = a1(1 + mx∗2 )/a2, k3 = k2(r2 + d3)/r2. Calculating the
derivative of V31(t) along positive solutions of model (1.2), it follows that
V31(t) = k1r(x1(t) − x∗1 )
x∗1 x1(t)
[−x2(t)(x1(t) − x∗1 ) + x1(t)(x2(t) − x∗
2 )]
+r1(x2(t) − x∗2 )
x∗2 x2(t)
[−x1(t)(x2(t) − x∗2 ) + x2(t)(x1(t) − x∗
1 )]
− a(x2(t) − x∗2 )2 − a1 y2(t)
1 + mx2(t)(x2(t) − x∗
2 )
+a2k2(y1(t) − y∗1 )x2(t − τ)y2(t − τ)
y1(t)(1 + mx2(t − τ))− k2(r2 + d3)(y2(t) − y∗
2 )
+k3r2 y1(t)(y2(t)−y∗2 )
y2(t)−k3d4(y2(t)−y∗
2 )+ a1 y∗2
1+mx∗2(x2(t) − x∗
2 )
= − r1
x∗2
[√x2(t)
x1(t)(x1(t) − x∗
1 ) −√
x1(t)
x2(t)(x2(t) − x∗
2 )
]2
− a(x2(t) − x∗2 )2 − a1(1 + mx∗
2 )x2(t)y2(t)
1 + mx2(t)+ a1(1 + mx∗
2 )
x2(t − τ)y2(t − τ)
1 + mx2(t − τ)+ a1 y∗
2
1 + mx∗2(x2(t) − x∗
2 ) − a1(1 + mx∗2 )
y∗1 x2(t − τ)y2(t − τ)
y1(t)(1 + mx2(t − τ))− k3r2 y∗
2y1(t)
y2(t)+ k2(r2 + d3)y∗
1 + k3d4 y∗2 .
(4.7)
Define
V3(t) = V31(t) + a2k2
t∫
t−τ
[x2(s)y2(s)
1 + mx2(s)− x2 ∗ y∗
2
1 + mx∗2
− x2 ∗ y∗2
1 + mx∗2
ln(1 + mx∗
2 )x2(s)y2(s)
x∗2 y∗
2 (1 + mx2(s))
]
ds. (4.8)
We derive from (4.7) and (4.8) that
V3(t) = − r1
x∗2
[√x2(t)
x1(t)(x1(t) − x∗
1 ) −√
x1(t)
x2(t)(x2(t) − x∗
2 )
]2
−a1x∗2 y∗
2
[x∗
2 (1 + mx2(t))
x2(t)(1 + mx∗2 )
− 1 − lnx∗
2 (1 + mx2(t))
x2(t)(1 + mx∗2 )
]
123

Global dynamics of a delayed predator–prey model
−a1x∗2 y∗
2
[y∗
2 y1(t)
y∗1 y2(t)
− 1 − lny∗
2 y1(t)
y∗1 y2(t)
]
−a1x∗2 y∗
2
[y∗
1 (1 + mx∗2 )x2(t − τ)y2(t − τ)
x∗2 y∗
2 (1 + mx2(t − τ))− 1−
lny∗
1 (1+mx∗2 )x2(t−τ)y2(t−τ)
x∗2 y∗
2 (1+mx2(t−τ))
]
−(x2(t)−x∗2 )2
[
a− a1 y∗2
x2(t)(1+mx∗2 )
]
.
(4.9)
If (H4) holds, we have
a − a1 y∗2
x2(t)(1 + mx∗2 )
≥ 0
with equality if and only if x2(t) = x∗2 . This, together with (4.9), implies that if (H4)
holds, V3(t) ≤ 0, with equality if and only if
x1 = x∗1 , x2 = x∗
2 ,y∗
2 y1(t)
y∗1 y2(t)
= y∗1 (1 + mx∗
2 )x2(t − τ)y2(t − τ)
x∗2 y∗
2 y1(t)(1 + mx2(t − τ))= 1.
We now look for the invariant subset M within the set
M ={
(x1, x2, y1, y2) : x1 = x∗1 , x2 = x∗
2 ,y∗
2 y1(t)
y∗1 y2(t)
= y∗1 (1 + mx∗
2 )x2(t − τ)y2(t − τ)
x∗2 y∗
2 y1(t)(1 + mx2(t − τ))= 1
}
.
Since x1 = x∗1 , x2 = x∗
2 on M and consequently 0 = x∗2 [ rr1
r1+d1− d2 − ax∗
2 − a1 y2(t)1+mx∗
2],
which yields y2(t) = y∗2 . It follows from the fourth equation of model (1.2) that
0 = y2(t) = r2 y1(t) − d4 y2(t), which leads to y1 = y∗1 . Hence, the only invariant
set in M is M = {(x∗1 , x∗
2 , y∗1 , y∗
2 )}. Using the LaSalle’s invariant principle, the globalasymptotic stability of E∗ follows.
We now give an example to illustrate the main results in Theorem 4.3.
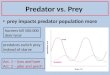
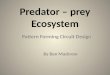
Example 2 In (1.2), let a = 16, a1 = 5, a2 = 1, d1 = d2 = d3 = d41/8, r = 3.5,r1 = r2 = 1, m = 1/10. It is easy to show that model (1.2) has a unique coexistenceequilibrium E∗(0.4437, 0.1426, 0.0179, 0.1428). Hence, by Theorem 3.1, model (1.2)is permanent. From the proof of Lemma 3.1, we have lim supt→∞ y2(t) ≤ M2. Hence,for ε > 0 sufficiently small, there is a T1 > 0, such that if t > T1, y2(t) < M2 + ε. Itfollows from (1.2) that, for t > T1,
x2(t) > r1x1(t) − d2x2(t) − ax22 (t) − a1(M1 + ε)x2(t),
123

L. Wang et al.
0 20 40 60 80 100 120 140 160 180 2000
0.2
0.4
0.6
0.8
1
1.2
1.4
time t
solu
tion
x1(t)
x2(t)
y1(t)
y2(t)
Fig. 2 The temporal solution found by numerical integration of model (1.2) with τ = 4; (φ1, φ2, ϕ1, ϕ2) =(0.5, 0.5, 0.5, 0.5)
which yields
lim inft→∞ x2(t) ≤ rr1 − (r1 + d1)(a1 M2 + d2)
a(r1 + d1):= x2
By calculation, we derive that x2 ≈ 0.0909, rr1−d2(r1+d1)a(r1+d1)
− d4(r2+d3)a2r2−md4(r2+d3)
≈ 0.0440 .By Theorem 4.3, E∗ is globally asymptotically stable. Numerical simulation illustratesthis fact (see Fig. 2).
5 Discussion
In this paper, we have incorporate stage structure for both the predator and the preyinto a predator–prey model with time delay due to the gestation of the predator. Byusing Lyapunov functionals and LaSalle’s invariance principle, we have establishedsufficient conditions for the globally stability of the trivial equilibrium, the boundaryequilibrium and the positive equilibrium. As a result, we have shown the threshold forthe permanence and extinction of the model. By Theorem 4.1–4.3, we see that: (i) ifrr1 < d2(r1 + d1), then both the prey and the predator population go to extinction;(ii) the prey species is permanent but the predator becomes extinct if and only if0 <
rr1−d2(r1+d1)a(r1+d1)
<d4(r2+d3)
a2r2−md4(r2+d3); (iii) if x2 >
rr1−d2(r1+d1)a(r1+d1)
− d4(r2+d3)a2r2−md4(r2+d3)
> 0,then both the prey and predator species of model (1.2) are permanent.
Acknowledgments This work was supported by the National Natural Science Foundation of China (No.11101117).
123

Global dynamics of a delayed predator–prey model
References
1. Aiello, W.G., Freedman, H.I.: A time delay model of single species growth with stage-structure. Math.Biosci. 101, 139–156 (1990)
2. Chen, Y., Yu, J., Sun, C.: Stability and Hopf bifurcation analysis in a three-level food chain systemwith delay. Chaos Solitons Fractals 31, 683–694 (2007)
3. Cooke, K., Grossman, Z.: Discrete delay, distributed delay and stability switches. J. Math. Anal. Appl.86, 592–627 (1982)
4. Georgescu, P., Hsieh, Y.H.: Global dynamics of a predator–prey model with stage structure for thepredator. SIAM J. Appl. Math. 67(5), 1379–1395 (2007)
5. Hale, J.: Theory of Functional Differential Equation. Springer, Heidelberg (1977)6. Hale, J., Waltman, P.: Persistence in infinite-dimentional systems. SIAM J. Math. Anal. 20, 388–395
(1989)7. Hassard, B., Kazarinoff, N., Wan, Y.H.: Theory and applications of Hopf bifurcation. In: London
Mathematical Society Lecture Notes, Series, 41. Cambridge University Press, Cambridge (1981)8. Kuang, Y.: Delay Differential Equation with Application in Population Synamics. Academic Press,
New York (1993)9. Song, Y., Han, M., Peng, Y.: Stability and Hopf bifurcations in a competitive Lotka–Volterra system
with two delays. Chaos Solitons Fractals 22, 1139–1148 (2004)10. Sun, X.K., Huo, H.F., Xiang, H.: Bifurcation and stability analysis in predator–prey model with a stage
structure for predator. Nonlinear Dyn 58(3), 497–513 (2009)11. Wang, W.: Global dynamics of a population model with stage structure for predator. In: Chen, L., et al.
(eds.) Advanced Topics in Biomathematics, pp. 253–257. Word Scientific Publishing Co., Pte. Ltd.,Singapore (1997)
12. Wang, W., Chen, L.: A predator–prey system with stage-structure for predator. Comput. Math. Appl.33, 83–91 (1997)
13. Xia, Y.H., Cao, J., Cheng, S.S.: Multiple periodic solutions of a delayed stage-structured predator–preymodel with nonmonotone functional responses. Appl. Math. Model. 31(9), 1947–1959 (2007)
14. Xiao, Y., Chen, L.: Global stability of a predator–prey system with stage structure for the predator.Acta Math. Sin. 19, 1–11 (2003)
15. Xu, R.: Global stability and Hopf bifurcation of a predator–prey model with stage structure and delayedpredator response. Nonlinear Dyn 67, 1683–1693 (2012)
16. Xu, R., Ma, Z.: The effect of stage-structure on the permanence of a predator–prey system with timedelay. Appl. Math. Comput. 189, 1164–1177 (2007)
17. Xu, R., Ma, Z.: Stability and Hopf bifurcation in a predator–prey model with stage structure for thepredator. Nonlinear Anal. Real World Appl. 9(4), 1444–1460 (2008)
123