Embed Size (px)
DESCRIPTION
fly vehicle identification
Citation preview

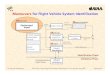
AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug.2006 Validation/1Dr. Ravindra Jategaonkar
ParameterAdjustments
Model Response
ResponseError
ActualResponseInput
Maneuver
ModelValidation
ComplementaryFlight Data
Identification Phase
Validation Phase
OptimizedInput
Flight Vehicle
IdentificationCriteria
EstimationAlgorithm /Optimization
Data Collection& Compatibility
easurementsM
ethodsM
odelsM
A Priori Values,lower/upperbounds
Model Structure
Validation of Flight Vehicle System Identification
-+
MathematicalModel /
Simulation

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug.2006 Validation/2Dr. Ravindra Jategaonkar
This page is left intentionally blank.

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug.2006 Validation/3Dr. Ravindra Jategaonkar
Data Base Validation (1)
System identification:“Given the system inputs and responses, what is the model?”
Model Validation:“How do you know that you got the right answer?”
Definition:“… Validation refers to the process of confirming that the conceptual model is applicable or useful by demonstrating an adequatecorrespondence between the computational results of the model and the actual data (if it exists) or other theoretical data.”
Broad classification:
1) Statistical properties of the estimates,
2) Residual analysis, and
3) Model predictive quality

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug.2006 Validation/4Dr. Ravindra Jategaonkar
Data Base Validation (2)
Several criteria1) Standard derivations
2) Correlation among the estimates
3) Goodness of fit
4) Plausibility of estimates (WT data base)
5) Statistical analysis of residuals (bias, variance, covariance, and PSD)
6) Model deficiencies in terms of residual control inputs (inverse simulation)
7) Model predictive capability
"ACID TEST“Simulation and comparison with flight data not used in identification
- Criteria to be used in conjunction with each other
- Basic philosophy remains same for simple as well as for global models

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug.2006 Validation/5Dr. Ravindra Jategaonkar
Statistical Accuracy of Parameter Estimates
Measure of accuracyClues into the effectiveness, or lack thereof, of model parameters
Fischer information matrix provides a good approximation to the parameter error covariance matrix P:
Standard deviations (Cramer-Rao bounds):
Correlation coefficients:
( ) ( )1
1
1−
=
−
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧∑ ⎥⎦
⎤⎢⎣⎡
Θ∂∂
⎥⎦⎤
⎢⎣⎡
Θ∂∂
≈N
kk
Tk tyRtyP
iii p=Θσ
ji
ijji pp
p=ΘΘρ

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug.2006 Validation/6Dr. Ravindra Jategaonkar
Statistical Accuracy: Practical difficulties
Standard deviations:- Estimated error bounds are too optimistic
-> use fudge factor of 5-10(ad hoc approach to bridge the gap between theory and practice).
-> Scatter in the estimates larger than standard deviations(non trivial issue; scatter can not be avoided)
- Variances of the estimated parameters and the covariances(off diagonal elements of the error matrix) must be small.
- Correlation coefficients:-> Linear dependency (> 0.9; >0.95; >0.98…..)

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug.2006 Validation/7Dr. Ravindra Jategaonkar
Residual Analysis: Goodness of fit
Cost function value:- ML estimation: determinant of R (covariance matrix of residuals) - Most direct way to evaluate model quality- Cost function value should be small:
Value depends on the number of system outputs, noise level, and unitsof the variables (radians or degrees; g or m/s2; m/s or kts)
- Absolute value alone of limited use
- No consistent workable criteria has been put forward- Old adage: Goodness of Fit is no criteria.
It is a necessary but not a sufficient condition.
Peculiarity of cost function:Very low value does not guarantee equally good matching of all variables; In worst case a perfect match of one variable yields minimum.

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug.2006 Validation/8Dr. Ravindra Jategaonkar
Residual Analysis: Overall Fit and Decomposition of Fit Error
Theil’s inequality coefficient
Ratio of the root mean square fit error and the root mean squarevalues of the measured and estimated signals summed together
TIC is normalized: between 0 and 1
0 --> perfect fit1 --> worst case ==> two time series are very significantly different
Thumb rule: Acceptable TIC value depends on the application, in general 0. 25 to 0.3 indicates a good agreement
∑=
+∑=
∑=
−=
⎥⎦⎤
⎢⎣⎡
⎥⎦⎤
⎢⎣⎡
⎥⎦⎤
⎢⎣⎡
N
1k
2)kt(yN
1N
1k
2)kt(zN
1
N
1k
2)kt(y)kt(zN
1TIC

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug.2006 Validation/9Dr. Ravindra Jategaonkar
Residual Analysis: Decomposition of Fit Error
Bias proportion: measure of systematic
error in the identified model
Variance proportion: represents the model’s ability
to duplicate the variability inthe true system
Covariance proportion: measure of non-systematic
error
and denote the mean vales; and the standard deviations and correlation coefficients.
Bias and variance proportions should be very small (typically less than 0.1), in an ideal case, zero;
Covariance proportion should be close to one.
∑=
−
−= N
kkiki
iiMi
tytzN
yzU
1
2
2
)]()([)/1(
)(
∑=
−
−= N
kkiki
iyzSi
tytzNU i
1
2
2
)]()([)/1(
)( σσ
∑=
−
−= N
kkiki
yiziCi
tytzNU i
1
2)]()([)/1(
)1(2 σσρ
1=++ Si
Ci
Mi UUU
iz iyσ ρ

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug.2006 Validation/10Dr. Ravindra Jategaonkar
Inverse SimulationSimulation: given inputs u and system model f, find system output y
Inverse Process of calculating desired controls, for the givensimulation system model and response.
Closely similar to the control problem (namely, given system model f and output y, find control input u).
Subtle difference:Classical control problem does not require measured system responses.Inverse simulation explicitly needs measured responses, and leads to
controls based on residuals.
Aircraft
Feedbackcontroller
Mathematicalmodel
Inputu
Measured Responsez
yComputed Response
Δu+_

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug.2006 Validation/11Dr. Ravindra Jategaonkar
Elevator Aileron
Angle of attack, deg0 10 20
-.16
-.28
-.20
-.24
/rad
Clξ
Angle of attack, deg0 10 20
-1.0
-1.6
-1.2
-1.4
/rad
Cmη
Rudder
Angle of sideslip, deg0 10-10
-.14
-.18
-.16
/rad
Cnζ
Wind tunnel / analytical prediction
Estimates from flight data
Model Plausibility (1)
Example: Control surface effectiveness - ATTAS VFW-614

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug.2006 Validation/12Dr. Ravindra Jategaonkar
Rolling motionShort period motion
Mach number
-4.0
-10.0
-6.0
-8.0
/rad
0 0.2 0.60.4
Cmq
Cmα.
Mach number
-.80
-1.1
-.90
-1.0
/rad
Clp
0 0.2 0.60.4
Dutch roll motion-.10
-.70
-.40
/rad
Mach number
Cnr
Cnβ.
0 0.2 0.60.4
Wind tunnel / analytical prediction
Estimates from flight data
Damping Derivatives - ATTAS VFW-614
Model Plausibility (2)

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug.2006 Validation/13Dr. Ravindra Jategaonkar
0
1
P RP
HI
PSI
VK QTH
EU
KW
K H
Eigenvalue = ( -1.61196 , + - 0 )
0
1
P RP
HI
PSI
VK QTH
EU
KW
K H
Eigenvalue = ( -0.965076 , + - 1.75372 )
0
1
P RP
HI
PSI
VK QTH
EU
KW
K H
Eigenvalue = ( -0.142527 , + - 1.54814 )
0
1
2
3
4
5
6
-1.6 -1.4 -1.2 -1 -0.8 -0.6 -0.4 -0.2 0
Im[ra
d/s]
Re [1/s]
0.3 0.2 0.1
00
Eigenvalues and eigenvectors completely characterize the system behavior
Linearized system matrix
Model Plausibility (3)
Dutch rollShort period

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug.2006 Validation/14Dr. Ravindra Jategaonkar
Model Predictive Capability (1)
Proof-of-Match (POM):
An important part of flight simulator certification and acceptance.
Compare the flight measured system responses with those predicted by the model for the same (“identical”) control inputs.
In this POM process, the identified (aerodynamic) model is kept fixed.
Other important issues:
1) Proper choice of the data set to compare against,
2) Initial conditions on the state variables (trim), and
3) Criteria to check adequate correspondence between model response and measured aircraft outputs.

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug.2006 Validation/15Dr. Ravindra Jategaonkar
Model Predictive Capability (2)
Proof-of-Match (POM):
Data set: Complementary flight data, i.e., flight maneuvers not usedin the estimation the of aerodynamic (“Acid test”)FAA has defined a set of roughly a little more than 100 different cases, covering different modes of aircraft motion, and configurations
Initial conditions: Ideally, the simulation is to be started from the same initial conditions as in the flight
Criterion: FAA tolerances (to avoid subjective evaluation)
Non trivial task: Measurements corrupted by noisePresence of turbulenceModeling errors
Allow small biases on the selected initial conditions and on themeasured control deflections

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug.2006 Validation/16Dr. Ravindra Jategaonkar
Model Predictive Capability (3)
ReversibleFlight Control
Dynamics
Measured Aircraft MotionVariables
MeasuredPilot InputForces
Control SurfaceDeflection
Aircraft MotionVariables
Rigid BodyDynamics
Flight controls stand-alone
Measured Control SurfaceDeflect.
Rigid-body stand-alone
ReversibleFlight Control
Dynamics
Rigid BodyDynamics
Integrated model
Control SurfaceDeflection
Aircraft MotionVariables
Pilot InputForces
Stand-alone and integrated models

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug.2006 Validation/17Dr. Ravindra Jategaonkar
Model Predictive Capability (4)
Elevatordeflection
Pitch rate
Verticalacceleration
time sec
deg/s
deg
g
10
0
-5
15
0
-10
-2.5
0.5
0 2.5 5 7.5 10
Time domain verification:
Majority of VT in time domaine.g., 1.5°/s for rates, 0.1 g for accelerations
Few are in terms of dampingratio and frequency; e.g.,0.02 damping ration, 10% period
Recent effort:Frequency domain criteria
Validation test 2c11: Short period dynamics

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug.2006 Validation/18Dr. Ravindra Jategaonkar
Frequency domain criteria
Bode plots of measured to model estimated responsee.g., qm/q (error function)
Ideally, for a perfect match:0 dB magnitude and 0 deg phase angle
over the frequency range
Boundaries are based on the LOES (Low Order Equivalent System) mismatch criteria: unnoticeable dynamics
Brings our more clearly the range of model applicability
Important for high authority FCS where aeroservoelasticeffect may be dominant
Model Predictive Capability (5)
0.3 1 10 20Frequency rad/s
Phase
deg
-80
-40
0
40
-10
-5
0
5
10
Magnitude
dB
Validation test 2c11: Short period dynamics
More restrictive tolerance band in the range of 1 to 5 rad/spilot cross-over frequency, allows more error outside of it (LOES phase-lead leniency), and are asymmetric at low frequencies (allow more phase lead error than phase lag error) to have better fidelity with respect to lag error which might cause pilot-induced oscillations.

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug.2006 Validation/19Dr. Ravindra Jategaonkar
Model Predictive Capability (6)
-30
-20
-10
05
P / AILERON and P / AILERON
Magnitude
-360
-300
-240
-180
1 10Frequency
dB
rad/s
Phase
deg
From Identified model:
Linearized system matrices A, B, C, D
Frequency response matrix
From measured flight responses:
Approximation of frequency responsesthrough FFT techniques
Noisy measured data: smoothing
DB)AIj(C)j(G +−−= 1ωω

AIAA Short Course: Flight Vehicle System Identification in Time Domain, Aug.2006 Validation/20Dr. Ravindra Jategaonkar
ReferencesJategaonkar, R. V., Flight Vehicle System Identification: A Time Domain Methodology,Volume 216, AIAA Progress in Astronautics and Aeronautics SeriesPublished by AIAA Reston, VA, Aug. 2006, ISBN: 1-56347-836-6http://www.aiaa.org/content.cfm?pageid=360&id=1447
Hamel, P. G. and Jategaonkar, R. V., “Evolution of Flight Vehicle System Identification”, Journal of Aircraft, Vol. 33, No. 1, Jan.-Feb. 1996, pp. 9-28.
Hodgkinson, J. and Mitchell, D., “Handling Qualities”, in Flight Control Systems, Pratt, R. W. (Ed.), AIAA Progress in Astronautics and Aeronautics Series, Vol. 184, 2000, Chapter 4.
Jategaonkar, R.V., “Determination of Aerodynamic Characteristics from ATTAS Flight Data Gathering forGround-Based Simulator”, DLR-FB 91-15, 1991.
Murray-Smith, D. J., “Methods for the External Validation of Continuous System Simulation Models: A Review”, Journal of Mathematical and Computer Modelling of Dynamical Systems, Vol. 4, No. 1, 1998, pp. 5-31.
N.N., “Airplane Simulator Qualification”, FAA Advisory Circular, AC 120-40C,Interim Version, Jan. 1995.
N.N., “ Joint Aviation Requirements - Aeroplane Flight Simulators”, JAR-STD 1A, Westward Digital Ltd., Cheltenham, England, April 1997.
Tischler, M. B., “System Identification Methods for Aircraft Flight Control Development and Validation”,NASA TM 110369, Oct. 1995.
see also the References from the Section “Examples”