-
8/8/2019 Flow Meas Notes 0506 v04
1/35
1
flow meas notes 0506 v04.doc
The University of Edinburgh
School of Engineering and Electronics
Fluid Mechanics 3
Flow Measurement Methods
Tom Bruce1
February 2006
Summary
This short course aims to generate an awareness of the range of
contemporary flow measurement
devices and methods available for application to both industrial
and research flow problems in
Mechanical Engineering. Well-established mass and volume flow
rate measuring devices are
reviewed, and the strengths and weaknesses of various meters and
classes of meter are discussed.
Modern non-invasive methods - magnetic and ultrasonic - are also
discussed.
Velocimetry (or anemometry) methods are then discussed, with a
distinction drawn between
point measurement methods and 2-D methods. In the former
category, Laser-Doppler
anemometry is described in detail. Under 2-D methods, Particle
Image Velocimetry is described
in detail and a range of applications presented.
1Lecturer, School of Engineering and Electronics, University of
Edinburgh, Kings Buildings, Edinburgh,
EH9 3JL, Scotland. Tel: +44 (0)131 650 8701, email:
[email protected]
-
8/8/2019 Flow Meas Notes 0506 v04
2/35
flow meas notes 0506 v04.doc 2
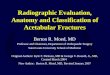
1. Introduction
1.1 Rationale, Aims and Objectives
This short course was introduced in 93/94 to reflect a major
research interest of the Fluid
Mechanics research group within the School.Fluid flow
measurements are performed across the breadth of engineering, eg
flows of oil, gas,
petrol, water, process chemicals, effluent are all necessarily
and routinely measured. In the
research laboratory, advanced flow measurements are providing
new insights into a wide range of
engineering flow problems in hydrodynamics (eg wave impact
loading on coastal defences,
beach erosion) combustion (eg low NOx burners, IC engines),
aerodynamics (eg wind turbine
optimisation and performance prediction) to list but a few.
The course aims to generate an awareness and understanding of
the range of contemporary flow
measurement techniques available with the emphasis on devices
and techniques with wide
application in Mechanical Engineering. It is the objective of
the course that by its end, the
participant should be able
to describe the principles of operation of differential
pressure, positive displacement, rotaryinferential, fluid
oscillatory, electromagnetic and ultrasonic flow meters. to discuss
advantages and disadvantages of the above meters for different
applications. to design systems incorporating differential pressure
meters. to describe the principle of operation of hot-wire
anemometry. to describe the principles of Laser-Doppler Anemometry
(LDA). to discuss the strengths, weaknesses and limitations of LDA.
to design LDA systems to suit given experimental flow problems. to
describe the principles of Particle Image Velocimetry (PIV). to
discuss the strengths, weaknesses and limitations of PIV. to design
PIV systems to suit given experimental flow problems.
1.2 Types of Measurement
Mass flow rate / volume flow rate
The most common industrial flow measurement requirement is a
measure of the volume or mass
of fluid flowing per second through a given cross-section of a
pipe. A wide range of devices exist
for these purposes reflecting the wide range of conditions which
may prevail liquid flow, gas
flow, fluid temperature, pressure, viscosity, conductivity, the
cleanliness of the fluid, the presence
of flow disturbance A selection of the most common and useful
devices are presented in
Section 2.
Velocimetry (or Anemometry)
In many applications, particularly in the research laboratory,
it is the actual local flow velocity
that is of interest rather than the total flow rate. Velocimetry
methods fall into two broad
categories: those which measure the flow velocity at a single
point and those which offer velocity
data over a 2-D plane or even a 3-D volume. Point measurement
methods may provide very high-
resolution time histories of the velocity at a point. However,
if a flow is neither steady nor
precisely repeatable or periodic, then single point methods
cannot be used to build up a 2-D
velocity map in a point by point manner. 2-D methods are a
recent addition to the armoury of
methods of flow measurement. Point measurement methods are
described in Section 3. Section 4
is devoted to the description of 2-D methods.
-
8/8/2019 Flow Meas Notes 0506 v04
3/35
flow meas notes 0506 v04.doc 3
2. Pipe Flows: Measurement of Volume and Mass Flow Rates
2.1 Differential Pressure Flow Meters
Differential pressure flow meters all infer the flowrate from a
pressure drop across a restriction in
the pipe. For many years, they were the only reliable methods
available, and they remain populardespite the development of higher
performance modern devices, mostly on account of
exceptionally well researched and documented standards.
The analysis of the flow through a restriction (Figure 2.1)
begins with assuming straight, parallel
stream lines at cross sections 1 and 2, and the absence of
energy losses along the streamline from
point 1 to point 2.
D1 Dt D2
2
1
Figure 2.1: A generalised restriction / differential pressure
flow meter.
The objective is to measure the mass flow rate, &m . By
continuity,
&m u A u A= =! !1 1 2 2
[2.1]
Bernoullis equation may now be applied to a streamline down the
centre of the pipe from a point
1 well upstream of the restriction to point 2 in the vena
contracta of the jet immediately
downstream of the restriction where the streamlines are parallel
and the pressure across the duct
may therefore be taken to be uniform:
u p u p1
2
1 2
2
2
2 2+ = +
! ![2.2]
assuming that the duct is horizontal. Combining with [2.1]
gives
& ( )mA
A
A
p p=
!
!
2
22
12
1 2
1
2" [2.3]
For a real flow through a restriction, the assumptions above do
not hold completely. Further, we
cannot easily measure the cross-sectional area of the jet at the
vena contracta at cross-section 2
where the streamlines are parallel. These errors in the
idealised analysis are accounted for by
introducing a single, cover all correction factor, the discharge
coefficient, C, such that
& ( )mCA
p pactualt
=
!
!
1
24 1 2
"
# where !"D
D
t
1
. [2.4]
Dt and At are the diameter and area of the throat of the
restriction respectively.
-
8/8/2019 Flow Meas Notes 0506 v04
4/35
-
8/8/2019 Flow Meas Notes 0506 v04
5/35
flow meas notes 0506 v04.doc 5
In summary, the principal advantages of the orifice plate
are
it is simple and robust standards are well established and
comprehensive plates are cheap may be used on gases, liquids and
wet mixtures (egsteam)Its principal drawbacks are
low dynamic range: &max
m : &minm only 4:1 at best (see tutorial 1)
performance changes with plate damage or build up of dirt.
affected by upstream swirl large head loss
Figure 2.4: Flow coefficients for orifice with corner taps.
Venturi Meter
The Venturi meter (after Giovanni Venturi, 17461822) is designed
to cause minimal head loss
as the flow passes the restriction. Figure 2.5 shows a typical
arrangement. Like the orifice plate,
the Venturi is dealt with by a British / ISO standard (BS EN ISO
5167-4)
For a Venturi, C= 0.99 for 105
-
8/8/2019 Flow Meas Notes 0506 v04
6/35
flow meas notes 0506 v04.doc 6
Figure 2.5: The Venturi meter (Furness, 1989)
The disadvantages compared to the orifice are
occupies longer length of pipe more expensive (manufacture and
installation)Flow Nozzle
In many respects, the flow nozzle is a compromise between the
compact orifice plate and the
efficient Venturi. There are two standardised designs - Figures
2.6 and 2.7. Flow nozzles have
proved particularly suited to high velocity applications,
egsteam metering.
Figure 2.6: The ISA flow nozzle.(Furness, 1989).
Figure 2.7: The ASME long radius nozzle(Furness, 1989)
For the ASME nozzle (see BS EN ISO 5127-3)
C= !0 99956 53
0 5
0 5.
.
Re
.
.
" 2% for 0.25 < < 0.75 and 10
4
-
8/8/2019 Flow Meas Notes 0506 v04
7/35
flow meas notes 0506 v04.doc 7
Figure 2.8: K for ASME long radius flow nozzles.
Figure 2.9: Comparison of permanent head loss caused by
restriction meters.
Advantages:
better head loss characteristics than orifice plate
self-cleaningDrawbacks:
higher cost than orifice plate more sensitive to upstream
disturbance than Venturi.2.2 Constant Pressure Flow Meters
-
8/8/2019 Flow Meas Notes 0506 v04
8/35
flow meas notes 0506 v04.doc 8
This class of meter measure the flow by monitoring the
position of a moving element which moves such that the
pressure drop across it remains constant. The most
common design is the rotameter - actually the name of
the first major supplier of this type of meter.
Figure 2.10 shows a rotameter. The small float is free to
move up and down a tube of taperedcross-section which
increases upwards. Thus the area available for the flow
increases as the float is forced upwards until the pressure
difference to keep the float at rest is restored.
The actual relationship between flowrate, tube and float
characteristics depends upon the fluid density and
viscosity. Ball-floats are common in gas flow
applications.
The main selling points of the rotameter are that it is
cheap and simple. It is however not a high performance
meter; accuracy is unlikely to be better than 2-3% unless
the meter is individually calibrated. A further potential
drawback is that it must be mounted vertically and can
only cope with uni-directional flow.
2.3 Positive Displacement (PD) Flow Meters
This class of meter measure the flow by dividing the fluid into
packets, each of a precisely
known volume. The number of such packets counted in a known time
gives a precise measure of
the volume flow rate. They are also known as PD Meters or simply
Displacement Meters. Undersuitable conditions, this class of device
offers the highest performance of any mechanical meter,
achieved through careful manufacture to high tolerances.
Liquid Displacement Meters
The Sliding Vane meter, Figure 2.11, is among the most accurate
PD meters - uncertainties in the
volume flow rate Q may be less than 0.2%. The dynamic range is
also quite high, typically
20:1. The liquid is channelled smoothly into the measuring
crescent, minimising head losses.
The vanes and channel are carefully machined to give smooth
operation with very low leakage.
The number of rotations is usually counted mechanically.
Another PD meter in widespread use is the Oval Gear meter -
Figure 2.12. Again, close
tolerances ensure minimal leakage. It is unlikely that an oval
gear meter can approach the
accuracy of the sliding vane meter. They may also introduce a
much greaterpulsing into the
outlet stream, which may or may not be a concern.
Figure 2.10: TheRotameter
(Furness, 1989)
-
8/8/2019 Flow Meas Notes 0506 v04
9/35
flow meas notes 0506 v04.doc 9
Figure 2.11: A Sliding Vane PD meter. Figure 2.12: An Oval
GearPD
meter.
Figure 2.13: TheNutating Disc PD meter.
A further variation on this theme is the Nutating Disc meter
(Figure 2.13). The incoming fluid
fills the chamber, alternately above and below the disc, driving
the disc in a rocking, circularmotion - nutation (cfspinning top
?). There is a greater area over which leakage could occur than
for sliding vane or oval gear meters, so the accuracy is not in
general so good, although meter life
is potentially longer.
Gas Displacement Meters
By far the most common gas PD meter is the Diaphragm meter, used
worldwide to meter
domestic gas consumption (Figure 2.15).
-
8/8/2019 Flow Meas Notes 0506 v04
10/35
flow meas notes 0506 v04.doc 10
Figure 2.15: The domestic gas meter.
The two chambers are filled and emptied alternatively,
controlled by a sliding valve as shown.
The motion of the diaphragm is connected mechanically to a
counting mechanism and readout.Mechanical reliability is
outstanding, but the design is really suited only to low flow rate,
low
pressure gas flows. Mass production means that these are
inexpensive devices.
Rotary gas meters operate in a similar manner to
oval gear meters for liquid flows. This type of
device is shown schematically in Figure 2.16.
Performance after calibration for a particular
application can be very good, 0.5%.
Dynamic ranges may be as great as 20:1.
Pressure may be as high as 80 atmospheres, but
moderately high temperatures (>600C) may cause
problems.
General Characteristics and Performance
At lowest flow rates, the friction of the moving parts may
become significant and lead to the
meter running too slowly. Leakage is also most likely to be
significant at lowest flows, again
leading to under-reading.
This class of meter all rely on moving parts with close
tolerances, so sustained operation over
long periods is not their strength. A further consequence of
their close tolerances is that they may
be sensitive to temperature changes, and almost certainly will
not operate well is the flow is not
clean, ie has particulate matter entrained at all.
Figure 2.16:
The rotary gas meter.
-
8/8/2019 Flow Meas Notes 0506 v04
11/35
flow meas notes 0506 v04.doc 11
In summary, advantages of this class of meter include
inherent high accuracy and repeatability good operational
experience high reliability insensitive to upstream flow conditions
can perform well with viscous fluids devices for liquid and gas
flowsAmong the drawbacks are
high performance designs are expensive unsuitable for use with
dirty flows pulsation introduced into out flow applicable to
uni-directional flows only applicable over limited ranges of
temperature and pressure. head loss increases with flow rate and
viscosity2.4 Rotary Inferential Flow Meters
This class of meter are all basically small hydraulic turbines
running at zero load. The rotary
element rotates at an angular velocity which is proportional to
flow rate. This rotation speed is
monitored by mechanical means, or better, by magnetic or optical
methods.
The basic axial turbine flow meter is shown in exploded view in
Figure 2.17.
Figure 2.17: Construction of anAxial Turbine flow meter.
The axial flow turbine has a bladed rotor running on bearings.
The assembly is mounted on acentral shaft, which is itself held by
hangerassemblies up and downstream. A magnetic pick up
senses the turbine blades as they pass, and the pulse frequency
is the measure the flow rate. The
total number of pulses recorded measures total volume
passed.
The driving torque of the fluid is resisted by mechanical
bearing friction, fluid drag and magnetic
drag, all of which effects vary with flow rate. The relation
between flow rate and the rotation
speed may be written
Q K= .!
whereKis the meter factorwhich must be calibrated for a given
meter.
-
8/8/2019 Flow Meas Notes 0506 v04
12/35
flow meas notes 0506 v04.doc 12
Figure 2.18: A performance curve for a turbine meter.
Figure 2.18 shows how K would typically vary with flow rate. The
actual shape of such a
characteristic curve will depend upon a multitude of parameters,
eg flow rate, viscosity, bearing
design, blade roughness, blade sharpness, inlet flow profile...
and must be determined for every
meter individually. The best meters incorporate
flow-straightening vanes upstream of the meter.
Simplification of the axial turbine meter is possible by using a
mechanical pick up to drive a
counting system. Such meters are clearly less accurate, and so
may be manufactured to lower
tolerances. The cost is lower, and they are also more suited to
dirty flows.
The propeller meter is essentially an axial turbine
meter modified in some way to reduce the cost of
production and installation to be reduced. Figure
2.19 shows one particular design in which the
bearing assembly is moved outside the flow and the
bladed propeller is inclined to the flow.
Performance is clearly poorer than for an axial
turbine meter, but the cost is much less. 2%
linearity over the operating range would be typical.
General Advantages and Drawbacks
Strengths RI flow meters include
excellent short term repeatability can indicate flow rate and
total flow directly excellent transient response relatively low
head losses designs available for liquid and gas flows reliability
is good in lubricating fluids wide flow ranges and linearity are
possible use over wide temperature and pressure ranges is
possibleDrawbacks include
necessity to calibrate to establish performance sensitive to
inlet flow profile and swirl sensitive to changes in viscosity
small designs have poor dynamic range sufficient back pressure
required to prevent cavitation2.5 Fluid Oscillatory Flow Meters (or
vortex meters)
Figure 2.19:
A propeller meter.
-
8/8/2019 Flow Meas Notes 0506 v04
13/35
flow meas notes 0506 v04.doc 13
The basis of fluid oscillatory meters is the process of vortex
shedding from a bluff body exposed
to a flow. Early work in fluid mechanics established that, at
Reynolds numbers above about 500,
continuous vortex shedding takes place, with the generation of a
vortex street in the wake
downstream of the bluff body. Further, the vortex shedding
pattern is largely independent of the
fluid density, the frequency of shedding depending only upon the
shape of the body, the
viscosity, and the flow speed. For a given shape of body in a
fluid of a given viscosity, the
Strouhal Number, S(Vincenz Strouhal, who first investigated
ringing of wires in 1878!) is given
by;
Sf d
u=
.
wherefis the frequency of the vortex shedding, dis a
characteristic dimension of the bluff body,
and u is the flow velocity.
Figure 2.20: Strouhal number vs. Reynolds number for circular
and triangular section
bluff bodies..
Figure 2.20 shows how the Strouhal number varies with Reynolds
number for vortex shedding
from bluff bodies of triangular and circular cross-sections.
Clearly, for the circular body, S 0.2
over the range 500
-
8/8/2019 Flow Meas Notes 0506 v04
14/35
flow meas notes 0506 v04.doc 14
body. The shedding of a vortex from the lower side of the bluff
body generates a lift on the body.
Similarly, shedding from the upper side causes the body to
experience a lift force in the opposite
direction. Thus the shedding of a continuous street of vortices,
alternately from upper and lower
surfaces induces a periodically varying lift force on the object
which may be measured by a force
sensor in the body. Possible sensors include piezo-electric,
thermal or mechanical devices.
The flowrate in a channel of diameterD, for a bluff body of
characteristic dimension dis given
by
QD f
S d
kd
D= !
"#$
%&'
(
(
.
. .
4
41
4
where Sis the Strouhal number,fis the vortex shedding frequency
and kis a shape factorfor the
bluff body (taking account of width and aspect ratio). Figure
2.22 illustrates a range of shapes
proffered by manufacturers of these flowmeters.
Relatively recent arrivals, these meters are now competing with
DP meters in many areas, eg
water, steam and air. Linearity may be as good as 0.5%, and
achieved dynamic ranges 15:1 (cf
Orifice meter, 4:1 at best).
Pros and Cons
No moving parts, crevices or seals - suitable for applications
where high flow cleanliness isimportant (egsemiconductor
manufacture)
May be used with liquids or gases. Insensitive to fluctuations
in temperature, pressure or density. Digital output. Very sensitive
to swirl or pulsation in incoming flow. Limited range of sizes
available. No standards yet, and limited operational experience.2.6
Electromagnetic Flow Meters
Figure 2.23: Illustration of Faradays Law - a primitive
generator.
When a conductor is moved through a magnetic field (Figure
2.23), a voltage is induced across
the conductor. This voltage (emf) e is proportional to the field
strength B, the velocity u of the
conductor and the length lof the conductor:
uBe l=
This is the basis of the electromagnetic flowmeter, ormagmeter.
For the magmeter, the conductor
is the flowing fluid, a field is applied across the pipe, and
the induced voltage is therefore a
measure of the velocity with which the conductor is moving.
Clearly, non-conducting fluids such
-
8/8/2019 Flow Meas Notes 0506 v04
15/35
flow meas notes 0506 v04.doc 15
as hydrocarbons cannot be metered by these means. For a pipe of
diameterD,
e k B u D= . . .
where k is a constant of proportionality. Figure 2.24
illustrates the components of a magnetic
flowmeter. The output signals may be very small and quite noisy,
but modern electronics can
cope cheaply and relatively easily with the necessary signal
conditioning.
Figure 2.24: An electromagnetic flowmeter.
This family of meters appear in a remarkable range of sizes
suitable for pipe bores from 3mm to
3m, with the result that they have found applications ranging
from the metering of blood flow in
arteries to the metering of flows in large hydroelectric
schemes. Typical applications include
water distribution and inorganic chemical process monitoring.
They also work well with non-
Newtonian fluid flows such as liquid metal flows, sewage
sludge...
Performance is good: 2-3% uncertainties are easily achieved;
0.5% achievable with the most
sophisticated designs.Pros and Cons
Obstructionless, so zero head loss. No moving parts. Wide size
range. Insensitive to profile distortion or swirl. Insensitive to
changes in pressure, viscosity, temperature and density. Linear
output with flowrate. Bi-directional operation no problem. Dynamic
range ~10:1. Works only with conducting fluids. Works with liquids
only. Errors larger than good PD or RI devices. Electrodes may foul
with some process liquids.
-
8/8/2019 Flow Meas Notes 0506 v04
16/35
flow meas notes 0506 v04.doc 16
2.7 Ultrasonic Time of Flight Flow Meters
The ultrasonic time of flight meter is in its relative infancy.
It is probably the only type of
meter capable of high performance (eg1%) with bores of >3m.
The basis of operation is the
measurement of the difference in the time of flight of sound
waves propagated in opposite
directions, with and opposing the flow. Figure 2.25 illustrates
the arrangement.
Figure 2.25: Time of flight ultrasonic flowmeter.
The sound propagates at velocity c through the liquid, which is
moving at velocity u. Referring to
Figure 2.25, it can be seen that the transit times from
transducer 1 to 2,21!
t , partially opposed by
the flow, and from transducer 2 to 1,12!
t , partially assisted by the flow, are given by
( )ucd
tcos
1.
sin21
!
="
and( )uc
dt
cos
1.
sin12
+=
!
The flow velocity u c, so the difference between the times of
flight is
21221
cot2
c
duttt =!=""
Thus t is proportional to u. The time difference may be very
small: eg for water flowing in a
100mm diameter pipe at 1ms-1
, the transit times are 100s, and t 100ns. Thus if a
performance to 1% is sought, timing will have to be good to 1ns
- so even now, complex
electronics is required.
These meters have been used successfully on water flows, clean
process fluid flows and on
natural gas pipelines. As with electromagnetic meters,
ultrasonic meters cover the whole
spectrum of sizes from mm up to an 11m bore application on a
hydro scheme.
Pros and Cons
Non-invasive - zero head loss. Gas or liquid flows possible.
Bi-directional applications possible. Wide range of sizes. May
simply be clamped to pipe. Sensitive to velocity profiles. Long
term stability unproven. Not suitable for dirty flows.
-
8/8/2019 Flow Meas Notes 0506 v04
17/35
flow meas notes 0506 v04.doc 17
2.8 Doppler Ultrasonic Meters
The basis of operation of this class of flowmeter is that if
sound of a given frequency is reflected
from a moving object, the frequency of the reflected sound is
shifted by an amount proportional
to the speed of the moving object (cf passing ambulance, driving
past players of bagpipes in
Glencoe laybys...). In these maters, ultrasound is transmitted
into a flow which contains scatterers
travelling with the flow (egdirt particles, bubbles), and the
scattered sound wave detected by a
receiver. The frequency shiftis then a measure of the flow
speed. A possible arrangement is
shown in Figure 2.26.
Figure 2.26: The Doppler flowmeter
The Doppler shift frequency is given by
f f f f u
c D trans rec trans= ! " 2 cos#
where c is the sound speed in the fluid and is the angle between
the transmission direction and
the pipe axis. (The theory of Doppler shifting is covered in
more detail in Section 3).
Because the velocity profile across the pipe will not, in
general, be uniform, a range of
frequencies will be received related to the velocity profile
that exists in the pipe. Usually, the
peak frequency is sought - this smearing of received, shifted
frequencies degrades the accuracy of
these devices.
Pros and Cons
Non-invasive - zero head loss. Bi-directional applications
possible. Liquids or gases. Wide range of sizes. May simply be
clamped to pipe. Works with dirty or aerated flows. Sensitive to
velocity profiles. Flow must contain ultrasound scatterers.
Long-term stability unproven. Low accuracy.
-
8/8/2019 Flow Meas Notes 0506 v04
18/35
flow meas notes 0506 v04.doc 18
2.9 Summary
Differential Pressure (DP) meters
Flow rate !p due to restriction in the flow.
Long term reliability. Gas and liquid. Extremely well documented
standards. Moderate accuracy; 1% - 5% Low dynamic range; 3:1 - 4:1
Sensitive to temperature and pressure changes. Sensitive to
upstream flow disturbances.Orifice Meter:
Simple and cheap construction. Large head loss. Error-prone in
dirty flows.Venturi: Bulky and expensive. Very low head loss. Not
susceptible to sedimentation in dirty flows.Flow Nozzle:
Compromise between Orifice and Venturi.
Positive Displacement (PD) meters
Fluid volume measured directly cumulative volumes measured.
Short-term reliability. Clean flows only. Different designs for
gases and liquids. Very accurate; better than 1% Moderate dynamic
range, up to 10:1 No calibration required. Devices suited to
limited ranges of pressures and temperatures. Not affected by
upstream disturbances. Introduces pulsation into downstream
flow.Rotary Inferential (RI) meters
A propeller rotates at a rate proportional to the flow rate.
Remote detection possible. Short-term reliability. No standard
possible - wide range of designs - calibration necessary. May be
very accurate - expensive designs may do better than 1%. High
dynamic range; up to 50:1 Designs for extremes of temperature and
pressure. Sensitive to upstream disturbance.
-
8/8/2019 Flow Meas Notes 0506 v04
19/35
flow meas notes 0506 v04.doc 19
Fluid Oscillatory meters
Vortex shedding from a bluff body - flow rate frequency of
shedding. Long-term reliability. Suitable for gas and liquid flows.
Moderate dynamic range; 15:1 possible No moving parts or seals -
suitable for applications where flow cleanliness is important.
Insensitive to changes in temperature, pressure and density.
Sensitive to upstream flow disturbance.Electromagnetic meters
Faradays Law: Voltage induced across conductor (conducting
fluid) moving in magneticfield speed of conductor, ie flow rate
induced voltage across duct.
Long-term reliability. Can be used only with conductive liquids
- no gases. Moderate to good accuracy; better than 1% when
installed correctly. Moderate dynamic range; 10:1 Application
possible in extreme conditions of temperature, pressure and flow
rate. Demanding applications in dirty flows, corrosive liquids,
non-Newtonian liquids possible. Wide range of pipe sizes.
Bi-directional flows OK. Non-invasive - zero head loss. Insensitive
to upstream disturbances.Ultrasonic Time of Flight meters
Sound propagated with and against the flow. Difference in time
of propagation flow rate. Long-term reliability. Clean gases and
liquids. Very accurate. Large dynamic range. Bi-directional flows
OK. Extremely large pipe sizes possible. Non-invasive - may be just
clamped to pipe. Sensitive to pressure and temperature
changes.Ultrasonic Doppler meters
Ultrasound scattered from moving scatterers in flow. Shift of
frequency speed of scatterer. Non-invasive - zero head loss.
Bi-directional applications possible. Liquids or gases. Wide range
of sizes. May simply be clamped to pipe. Works with dirty or
aerated flows. Sensitive to velocity profiles. Flow must contain
ultrasound scatterers. Long-term stability unproven. Low
accuracy.
-
8/8/2019 Flow Meas Notes 0506 v04
20/35
-
8/8/2019 Flow Meas Notes 0506 v04
21/35
flow meas notes 0506 v04.doc 21
The basis of these devices is that the heat transfer away from a
small heated wire, placed in a
fluid flow, is related to the local flow velocity at the wire.
The wire itself is typically only 0.1mm
to 2mm long, and of diameterm, so very high spatial resolution
is possible. Wires are usually
Tungsten, Platinum or Nickel. The wire is mounted on a thin arm
inserted into the flow - the
method is therefore intrusive.
In most designs, the current through the wire is kept constant,
and the change in resistance is the
measure of the local flow velocity. It is possible to record a
time history of the flow velocity at a
particular point, and very high time resolutions -up to 50 kHz -
are possible - though clearly such
rates require highly sophisticated electronics to track wire
resistance changes. Two or three wires
may be arranged orthogonally to give an estimate of two or all
three velocity components.
Hot wire anemometry is fundamentally a single point method, so
finds most applications in flows
whose structure is well known a priori, and where the interest
is in the time variation of velocity
at a point, eg in wind tunnel studies of vortex shedding, or in
measurements of turbulent
intensities.
3.4 Laser Doppler Anemometry (LDA)
Introduction
The early development Laser Doppler Anemometry (LDA) dates back
to the very end of the 60s,
when low power continuous wave (CW) lasers began to become
available at costs which were
not astronomical. Since then it has developed into a
sophisticated and robust tool suited both to
research laboratories and industrial applications. Developments
in electronic and computer
processing have improved data gathering and reduction beyond
measure, and optical
developments, notably in fibre-optics, have opened up many new
application possibilities.
The basis of LDA is not complicated, but a short digression into
some properties of light and of
laser beams will prove useful.
Laser Basics
All objects emit thermal radiation - a continuous range of
frequencies with the peak wavelength
of the spectrum depending upon the temperature of the body.
Hotter bodies emit a distribution of
radiation peaked at shorter wavelengths = higher energy
radiation. The radiation from the Sun
peaks at about 500 nm wavelength - green light - corresponding
to a temperature of around 6000
K. Photons from thermal sources are emitted over a wide range of
wavelengths and in all
directions.
The radiation from a laser (Light Amplification by Stimulated
Emission ofRadiation) is quite
different in character. Photons emerge with identical energies,
ie identical wavelengths, identical
phases, and all travelling in the same direction.
-
8/8/2019 Flow Meas Notes 0506 v04
22/35
flow meas notes 0506 v04.doc 22
E = 0
N
NE =!
1
2
thermal source laser source
Figure 3.3: Thermal and Laser light sources.
Figure 3.3 illustrates the fundamental difference between
thermal and laser radiation. Quantum
mechanics dictates that electrons orbiting the nuclei of atoms
cannot have any arbitrary energy,
but must be in one of a number of discrete energy states. If the
electron absorbs a quantum of
radiation - just the right amount of energy - then it moves up
to the next discrete energy level.
Equally, it may emit radiation, and in doing so, lose energy and
fall back one or more levels. The
energy associated with a photon of light of frequency fis given
by
E h f = .
where h is Plancks constant: h = 6.63 x 10-34
Js.
In a collection of atoms in a normal state, electrons are
continuously jumping between a large
number of different states, separated by a range of different
energies - they continuously absorb
and emit over a range of energies and therefore frequencies. In
a laser, it is arranged by some
means that a large number of atoms have a higher proportion of
electrons in a particular, raised
state - apopulation inversion. There is a tendency for these
electrons to drop back to their lower
energy state, and in doing so, they all emit photons of exactly
the same energy corresponding to
the energy difference between the levels.
Lasers have a unique ability to form light beams with high
energy concentrations. However, the
quantum nature of photons means that a small divergence of the
beam is always present. The
beam cannot be focused to a point, but only to a beam waistof
thickness 2wo , Figure 3.4.
!
2w0
lens
Figure 3.4: Laser beam waist.The beam waist thickness is given
by
!"
#=
.w0
Thus efforts to bring the beam to sharper focus result in
increased divergence.
Example: = 514nm, w0 = 12mm, = 0.014 mrad w = 25mm at 1000m from
waist.
= 514nm, w0 = 1mm, = 0.164 mrad w = 25mm at 6m from waist.
-
8/8/2019 Flow Meas Notes 0506 v04
23/35
-
8/8/2019 Flow Meas Notes 0506 v04
24/35
flow meas notes 0506 v04.doc 24
A receiver moving towards a stationary source of a sound wave
will encounter the wave crests at
a greater frequency than if (s)he were to be standing still.
Similarly, if (s)he were to be moving
away from the source of the waves, the crests would arrive at
the receiver at an apparently lower
frequency. The same effect applies to light.
s !
uno. of waves per second = c/"
Figure 3.6: The Doppler effect - stationary source, moving
receiver.
When the receiverR is stationary, the number of waves received
in a time tis
N f t c t0
= =.!
However, if the receiver is moving with a velocity u at an angle
to the direction of the wave
propagation as shown in the Figure, then the catch up speed of
the waves is reduced, and the
number of waves received in a time tis now
( )N ct
1 = ! component of u in direction of propagation"
( )! = " N c t 1
1
#u s.$
where $s is a unit vector in the direction of the wave
propagation. Thus the frequencies forstationary and moving
observers, f0 and f1 are given by the number of waves received per
unit
time, ie
fc
0=
!, ( )f c
1
1= !
"u s.$
and so thefrequency shiftis
! f f f = " = =0 1
1
#
$
#u s
u
.$cos
where is the angle between the direction of the wave propagation
and the receiver.
c/
-
8/8/2019 Flow Meas Notes 0506 v04
25/35
flow meas notes 0506 v04.doc 25
The Differential Doppler Method
laser!/2
beam splitter
photodetec
u
Figure 3.7: Set up for differential Doppler method.
The optical arrangement is sketched in Figure 3.7. A laser beam
passes into a beam-splitter from
which two beams emerge. Via an arrangement of mirrors, these two
beams are made to converge
at an angle , crossing at the measurement point. (The purpose of
the Bragg Cellis discussed
later in the Section). The light from these beams is then
scattered by any particle moving with the
flow -flow seeding- and the scattered light picked up by a
detector, ega photomultiplier and lenssystem. Only light scattered
in the direction of the detector is recorded - the main,
unscattered
beams pass through the system.
We can consider the scattering particle as first a receiver of
the incoming laser light, and then a
(re)transmitter of the light to the detector. The first process
- transmittal of light from a stationary
source to the moving particle - is just the situation shown in
Figure 3.6, with
= 90o
- /2. Therefore the particle receives light at a shifted
frequency. The light from the lower
beam will be shifted to a frequency
f f1 0
2= !
u sin"
#
since cos = cos (90o - /2) = sin /2 . The shifted frequency is
lower because a component of
the particles velocity is away from the source.
The light from the upper beam, when received by the particle
will also be shifted, but in this case
to a higher frequency since there is a component of the
particles velocity towards the source.
The shifted frequency is therefore
f f2 0
2= +
u sin!
"
The particle scatters the light that is incident upon it: the
scattered light is made up of two
frequencies, f1 and f2 . The particles velocity has no component
in the direction of the receiver,
so the light entering the detector is at the same frequencies at
which it was scattered from the
particle,f1 and f2 .
The final stage is to establish the shift in frequency in order
to establish the particles velocity.
When two waveforms of similar frequencies are combined, a
beatingeffect is seen (demo with
overlaying transparencies with lines drawn at spacings differing
by 5%). The beat frequency is
simply the difference between the component frequencies
f f f beat
= ! =2 1
22 u sin "
#
-
8/8/2019 Flow Meas Notes 0506 v04
26/35
flow meas notes 0506 v04.doc 26
!/2
"
fringe spacing#
u
Figure 3.8: Fringe pattern formed at beam intersection.
A more visual but less rigorous way to view the set up is to
think in terms of the fringe pattern
formed by the intersecting beams, sketched in Figure 3.8. A
particle moving through this volume
will be illuminated at intervals given by the time taken to pass
from one bright fringe to the
next. A particle travelling at speed u through a fringe pattern
with spacing will produce flashes
of light at a frequency given by
f
u
u= = =
1 1
! " "
but we know
!"
#=
2 2sin
so we arrive at the same result for the frequency of the light
received at the detector:
fu
=
2
2
!
"sin
This visual alternative formulation is useful in visualising the
effect offrequency shifting,
discussed below.
Practical Implementation
LDA systems are generally bought off the shelf. Dantec (based in
Copenhagen) and TSI Inc.
(USA) are the market leaders. The beam splitting and convergence
optics are generally packaged
into one black box, the detector plus its optics into another,
and the signal processing carried out
by sophisticated electronics in a third black box, usually
linked to a PC or workstation.
The seeding of the flow for LDA is not usually a problem: only
in the cleanest conditions in
water flow experiments are there no suitable scatterers present.
In gas flows, corn oil droplets
have been used to good effect.
Most systems are laid out as sketched in Figure 3.8 - a forward
scatterarrangement. This requiresoptical access to both sides of
the test volume. An alternative is to work in back scattermode,
detecting light scattered back in the direction of the incoming
beams. This set up has the
disadvantage that the much more light is scattered forward than
back, so for a given laser power,
there is much less light scattered to the detector. However,
optical access is required from only
one side, making it well suited to use with fibre optics - two
fibres are used - one to carry the
laser light to the measurement volume, and the second to carry
the back-scattered light to a
detector. A tiny optical head on the end of the fibre does the
beam splitting and alignment.
Multi-Component LDA
-
8/8/2019 Flow Meas Notes 0506 v04
27/35
flow meas notes 0506 v04.doc 27
A second pair of laser beams of different wavelength can be
arranged to intersect at the
measurement volume at right angles to the first pair, and
therefore give a measurement of a
second component of the flow velocity at that point. Similarly,
all three velocity components can
be measured with three pairs of intersecting beams which are
mutually perpendicular.
Two component fibre LDA systems based upon an Argon ion laser
make use of the two principal
wavelengths of laser light - the beam is split into a green beam
and a blue beam, and one used tomeasure each velocity component.
The back scattered light from both components is carried
down the one fibre before being separated again by the detector
optics.
Frequency Shifting - the Bragg Cell
In the form described above, it is clear that LDA cannot
distinguish the direction or sense of the
particles motion and therefore the fluid velocity.Frequency
shiftingis a trick to overcome this
limitation. Basically, the fringe pattern is given its own
velocity, and if this velocity is larger than
the largest velocity that the flow might have, then particles
will always appear to be crossing the
fringes in the same direction.
Put another way, if the fringes are moving back at a speed
greater than the particles backwardmotion, then the particle will
overtake the fringes, ie will be going forwards relative to the
fringe
pattern. A particle which was going forwards anyway will appear
to be going forwards even more
quickly, relative to the moving fringe pattern.
This apparent shiftedvelocity is then measured, and the known
shift subtracted to give the true
flow velocity.
The device which supplies this shift is called aBragg Cell. The
new measured frequency is
! = + f f f beat beat shift
so the apparent measured velocity is
! =!
u f"#
. beat
22.sin
The actual velocity is recovered by subtracting the shift
velocity, ushift , from the measured,
shifted velocity, u
( )u u u f f = ! " = ! "shift beat shift
#
$2 2.sin
-
8/8/2019 Flow Meas Notes 0506 v04
28/35
-
8/8/2019 Flow Meas Notes 0506 v04
29/35
flow meas notes 0506 v04.doc 29
As will be understood by the end of this Section, consideration
of the method of analysis of a
flow record to give a velocity map dictates much in the
selection of the parameters in the
experimental set-up for the recording of the flow records. Thus
the analysis methods are
discussed first - cross-correlation in Section 4.4, and
autocorrelation in Section 4.5. This is the
reverse of the historical development of the method, but
autocorrelation is perhaps more easily
explained once the principle of cross-correlation analysis is
understood.
General objectives for any analysis system can be laid down
quite simply. We have a flow
record or successive records containing velocity information
over a large field. We wish to be
able to define a grid of points over this area, and at each
point, interrogate a small area of the
photograph to establish the most common (most correlated)
particle image separation.
Additionally, we require that this process be highly accurate,
fast (ie hours are not taken to
analyse one flow record), and, apart from initialising a run,
completely automated.
4.4 Cross-Correlation PIV Analysis
The basis for cross-correlation analysis are two PIV flow
records taken ofexactly the same fieldin a flow separated by a
(usually short) time interval.
Figure 4.1: Typical interrogation areas from successive flow
records.
Figure 4.1 shows typical interrogation areas from two successive
records - selected small cells
within base and cross images, in this case of 32 x 32 pixels. A
number of approaches may be
taken to finding the distance moved by the tracers between
frames. For example, if the number
density of particle images is low, one approach might be to
carry out some image processing to
establish the positions of all images and in some way try to
pair the images. With a higher
density of images a method based on finding the
cross-correlation of the images within the
interrogation areas is a very efficient and robust approach.
The cross-correlation function C(x, y) is arrived at by
comparing the base and cross images
given by intensity distributionsIbase(x, y) and Icross(x, y). In
physical terms, the function is movingthe cross image relative to
the base image, seeking the best match between the intensity
patterns.
C x y I x y I x x y y dxdybaseIA
cross( , ) ( , ). ( , )! ! ! != " "##
The cross-correlation function in Figure 4.2 is a typical result
of the cross-correlation of partner
interrogation areas in base and cross images.
-
8/8/2019 Flow Meas Notes 0506 v04
30/35
flow meas notes 0506 v04.doc 30
Figure 4.2: The cross-correlation function arising from IAs
shown in Figure 4.1, above.
The clearly visible peak in the function indicates the offset in
x andybetween the base and cross
images at which the best correlation between the images was
found. Once the software has
calculated the cross-correlation function, it locates this peak
and records the x, y values.Knowledge of the optical magnification
and the time interval between images allows x, y
subsequently to be scaled to give a velocity vector relating to
the location of the interrogation
area.
4.5 Illumination Systems for PIV
Illumination for must usually also define a 2-d plane or sheet
through the flow. The source of
the light is typically a pulsed laser. Lasers are used because
the low divergence of their beams
allows thin sheets to be formed, and because the energy density
in the beam is very high, egwe
may need enough energy to image a 50 m tracer particle with a
camera 1 m away within a few
microseconds.
PIV illumination is usually achieved either by an expanded beam
method (Figure 4.3). The
pulsing of the illumination may be achieved by employing a
pulsed laser or (more historically)
combining a high speed shutter with a continuous wave (CW)
laser.
Figure 4.3: Expanded beam / pulsed laser illumination for
PIV.
-
8/8/2019 Flow Meas Notes 0506 v04
31/35
flow meas notes 0506 v04.doc 31
The width of the light sheet generated by either method
described above will be a compromise:
If the plane is too thick, then the measurement zone is moving
away from being a 2-d sectionthrough the flow.
If the plane is too thin, then even very small out-of-plane
motion may make it unlikely that aparticle stays in the illuminated
plane for long enough to record an image pair.
A practical criterion is that the cross plane velocity vz should
be small enough such that the cross
plane distance travelled between illuminations is less than 1/4
of the thickness of the sheet. This
is known as the out-of-plane criterion.
4.6 PIV Image Acquisition
4.6.1 Introduction
The process of acquiring good PIV flow records involves two
major stages. The first is selecting
appropriate hardware for the application eg, illumination,
seeding and camera, and the second is
using this hardware to best effect. This Section addresses both
of these stages.
4.6.2 Hardware
The hardware considerations may be divided into three broad (and
somewhat interdependent)
areas: illumination, flow seeding and camera. The illumination
system preferred for the
application of PIV to hydrodynamics has been discussed (Section
4.5).
Seeding
The selection of a suitable flow seeding is very important. The
seeding used in hydrodynamics
experiments at Edinburgh is conifer pollen. This meets the most
important criteria for a suitable
seeding: once soaked with water, it is almost exactly neutrally
buoyant, quite reflective at thewavelength of the laser, and small
enough to follow the flows studied (typical particle diameters
are 70m). Importantly, it is also quite inexpensive - the cost
to seed a flume containing six
tonnes of water is 2 - 5.
For air flows of high and low speeds, hollow glass spheres have
proved a very successful
seeding. Diameters are 10 - 20 m. Such small particles have a
tiny terminal velocity in air, and
so do not rapidly fall to Earth under gravity.
Generally now, a wide range (sizes and densities) of synthetic
seed particles are available from
PIV equipment suppliers.
Camera and Lens (Still Image Video or Conventional
Photography)
The choice of the camera and lens is also important. The lens
should be a flat-field lens in order
that distortions of the image plane are minimised. Choosing a
lens of longer focal length reduces
the apparent effect of any out-of-plane motions of particles in
the field, but increases the
difficulty of achieving a really sharp focus and makes the
process more sensitive to vibrations.
In the early years of Edinburgh PIV, a Hasselblad 500 EL/M
camera was the mainstay of PIV
measurements in hydrodynamics. In the early 90s, it was joined
by a Kodak MegaPlus still
image video camera (what would now be called simply a digital
camera). It was a
monochrome camera with 4 Mpixels (2048 x 2048 pixels
resolution). It cost over 20k - compare
this with the cost of a colour 4 Mpixel digital camera
today!
-
8/8/2019 Flow Meas Notes 0506 v04
32/35
flow meas notes 0506 v04.doc 32
Over the last ten years, PIV acquisition has become dominated by
specialist PIV cross-correlation
cameras. These cameras enable pairs of images to be acquired at
(at least) conventional video
frame rates, ie 25 base/cross image pairs taken per second.
These cameras are built to interface
easily to the trigger for a pulsed laser so that they
synchronise easily with the flow illumination.
Standard resolutions are now very good - typically 4Mpixels (2k
2k pixels) with cameras
offering up to 10 Mpixels beginning to become available (at a
price!).
Very high speed digital cameras have also been used successfully
for PIV. Frame rates of up to
30kHz have been used, though at some cost in spatial
resolution.
4.6.3 Recording the Flow Records
After the selection of the hardware, the important issues
remaining are the choice of camera
position, achieving the correct seeding density, optimising the
focus and optimising the exposure
parameters to give good, high contrast flow images
Seeding
The optimum seeding density is determined by considering the
subsequent analysis of the
photograph. In typical applications in the wave flumes at
Edinburgh, the local flow velocity at a
point on the flow record is averaged over a 32 x 32 pixel
interrogation area (IA). Thus the
seeding density should be high enough that there will always be
several (5 to 15) tracer particles
in each IA on the flow record. Experience is perhaps the best
guide to getting an optimum level
of seeding; once good results have been obtained, the successful
level of seeding can be repeated.
The size of the images of the seeding should also fall within
reasonable, intuitive bounds. Seeing
images which fill a substantial part of the IA would be too
large to offer a good correlation
between base and cross images. Similarly, if the image is so
small as to be less than one pixel in
size, then the analysis will only ever be able to see particle
image movements of whole units of
pixels (ie 1 pixel; 2 pixels; 3 pixels etc) whereas the shift
(base to cross) of an image spread overa few pixels can be measured
to sub-pixel accuracy.
The seeding should also be of a size that forms images of the
desired size. The size of a particle
image on the recording medium, di is determined by three
factors: the particle diameter, dp , the
magnification (recorded:actual size) M, and the lens aperture
used. defined by its f-number3, f#
:
d M d d i p spot = +2 2 2
where dspot is the diffraction-limited image size - the smallest
image that can be recorded by a
lens working at the given f-number, f# ,
( )d M fspot = +2 44 1. #!
Thus for larger magnifications, larger particles and larger
apertures (smaller f-numbers), the size
of the diffraction-limited image becomes less significant, and
the size of the recorded image
approaches that which would be expected on the basis of the
magnification alone.
Illumination Interval
Like the optimisation of seeding density, the choice of
illumination interval is dictated by
consideration of the subsequent analysis. The interval should be
set such that the largest velocity
3
The working diameter or aperture of the lens is usually given in
terms of the lens focal length, f, eganaperture of f/8 implies that
the aperture is 1/8
thof the focal length. In this case the f-number f# = 8.
-
8/8/2019 Flow Meas Notes 0506 v04
33/35
flow meas notes 0506 v04.doc 33
in the flow gives a particle image separation on the flow
record(s) which is the largest suitable for
the analysis system. Typically, if both particle images in a
pair are to stand a good chance of
falling within a single interrogation area, then the
criterion
max. image separation < 1/3 dimension of interrogation
area
serves as a guide. Normally an accurate estimate of the largest
velocities can be made, but it may
be necessary to try different intervals in order to optimise the
choice.
Focus
Achieving a really sharp focus is extremely important if good
PIV photographs are to be
obtained, and can be quite difficult, especially when a large
lens aperture or long focal length lens
are being used. Tests in which the focus is varied can provide a
route to optimisation.
Photographic Magnification
The magnification from the measurement zone to the image depends
upon the focal length of the
lens and the distance from the camera to the measurement zone.
Its selection is in generalanother compromise. It is often
desirable to measure as large a region as possible, but it is
again
important to consider the analysis phase. The velocities are
calculated from averaging particle
image displacements over a small (eg32 x 32 pixel) interrogation
region on the flow record. The
implicit assumption is that particle image displacements over
this small region are uniform: if
there is a strong displacement gradient present, errors are
introduced and the resulting data point
may be at best inaccurate and at worst, spurious. Therefore the
size of the area imaged onto the
flow record is typically limited to that which will result in
displacement gradients of less than
5% over any interrogation area, limiting systematic error from
this source to less than 1%.
Exposure
In general, tests trying various settings of camera aperture and
laser power is required for a newapplication. The quality of the
resulting flow records may then be assessed under analysis and
the best settings finalised.
If there is scope for choosing an aperture setting, it should be
remembered that the largest
apertures (smallest f numbers) give the poorest depth of field,
so focusing is more difficult.
However, if the particle image size is diffraction limited, the
smaller apertures (larger
f numbers) will result in larger particle images. Usingf/4
orf/5.6} is usually a good compromise.
Camera Positioning and Alignment
The geometric relation between the measurement plane in the flow
and the PIV image plane in
the camera may be generally specified by six coordinates - three
positional and three angular(Figure 4.7). The selection of these
coordinates corresponds to the positioning and alignment of
the camera.
The position of the camera in x1 and x2 (Figure 4.4) is
determined by the characteristics of the
measurement zone. In the simplest cases, the camera field of
view will be centred on the centre
of the measurement zone. However, if there is some feature in
the measurement zone which
partially obstructs the view such as a test object or a free
surface, then the selection of the camera
position may demand some care if as much as possible of the
region of interest is to be imaged.
The x3 position, the distance from camera to measurement plane
defines the magnification. The
magnification is chosen as a compromise between the size of the
measurement area and the
resolution of the velocity map.
-
8/8/2019 Flow Meas Notes 0506 v04
34/35
flow meas notes 0506 v04.doc 34
Figure 4.4: Camera alignment
Aligning the camera fixes the rotational degrees of freedom, 1 ,
2 and 3 . Thepitch 1 andyaw 2 axes must be set so that the camera
image plane is parallel to the measurement plane. If
this is not achieved precisely, not only will a systematic
distortion of the image plane result, but
also it may prove impossible to maintain a sharp focus over the
whole of the plane. The rollaxis
3 needs to be set if the object and image planes are not to be
rotated relative to one another.
Vibration
The sharpness of the particle images recorded on the film is an
important factor in the
signal-to-noise ratio of the resulting data. Therefore it is
important to consider possible sources of
mechanical vibration in the recording system and how they might
be minimised. Two possible
sources can, in general, be identified:1. the mounting of the
camera2. the internal workings of the cameraIf the camera is
mounted on a good quality tripod, itself standing on a solid lab
floor, there should
be little or no problem from this quarter. However, if the
camera is mounted otherwise, egupon a
moving stage in an image shifting system, or if the tripod rests
on a floor which vibrates for any
reason, related to the experiment or not, then steps may have to
be taken to minimise or at least
quantify the effect of vibration.
Registration
In general, it is desirable or necessary to be able to relate a
position on the flow image to anabsolute position in the real
measurement plane. This requires some form of registration
mark,
visible on the photograph, whose actual real world coordinates
are known. If there is an object
visible in the flow, ega cylinder, then this may present few
problems. Otherwise, the use of some
additional marker in the measurement plane, or even in another
known plane, will be necessary.
Calibration
Finally, provision should be made to measure the photographic
magnification from the laboratory
frame to the image frame. Again, it may be possible to measure
this directly from the image of
an object of known size in the measurement zone. However, in
most cases, it may be preferable
to take a dedicated calibration photograph before the start of a
run of experiments, egof an object
or grid of accurately known dimensions.
-
8/8/2019 Flow Meas Notes 0506 v04
35/35
4.6.4 Errors in PIV Measurement
A summary of the errors inherent in the acquisition phase of
autocorrelation PIV is presented in
Skyner [1992], from which the table below is reproduced.
factor typical random error systematic error
illumination interval 0.2 %
photographic magnification 0.3 %
photographic distortion 0.0 - 0.3 %
illumination plane flatness 0.0 - 0.3 %
illumination plane thickness 0.1 %
seeding not following flow 0.0 - 1.0 %
combined errors 0.4 % 1.0 - 1.6 %
4.7 Applications
A random selection of applications with which the Edinburgh
group has been associated...
Combustion
Flow in power station coal burners (live flame tests) Flow of
pulverised coal into power station combustion chamberCoastal
Engineering
Beach erosion /accretion Wave impacts on breakwaters Flow around
seabed pipelinesOffshore Engineering
Wave enhancement due to structure blockage Oceanic internal
waves Deep water breaking wavesWind Energy
Measurement of wake behind a wind turbineHeat Transfer
Recirculation in horizontal kettle reboilersFire Safety
Flow of fumes and smoke out of burning buildings