Embed Size (px)
Citation preview

Notes on Difference Equations for Macroeconomics: Part 2
Second-Order Difference Equations:
- Second order difference equation: current value or future value depends on values two periods earlier.yt = 1 yt-1 + 2 yt-2 +d
- Equilibrium if it exists: y*= yt = yt-1 = yt-2
y*= 1 y* + 2 y*+d so: y* = d/(1-1-2)
- Subtracting y* gives a homogenous 2nd order difference equation:
yt–y*= 1 (yt-1–y*) + 2 (yt-2 –y*) we will look at this below.
Solving a homogenous second-order difference equation:
- Iterative or recursive techniques used for 1st order difference equation are not so straightforward.
- How might this be solved? Let’s assume the solution is similar in form to that of a first order homogenous difference equation:
yt = at y0
- Say the homogeneous 2nd order difference equation has the form:
yt + a1 yt-1 + a2 yt-2 = 0 (everything on LHS – following Goldberg)
assume solution of the form: yt = Amt (A and m are constants: like 1st order case A depends on initial values and m on coefficients)
substitution gives:Amt + a1 Amt-1+ a2 Amt-2 = 0
Factor out Amt-2:Amt-2 (m2+a1m+a2) = 0 must hold for a solution.
Focus on non-trivial solutions (trivial? A=0) so we need the roots m1, m2 of : (m2+a1m+a2) = 0 (characteristic or auxiliary equation)
(quadratic formula: = −b±√b2−4 ∙ a∙ c2a
with a=1,b=a1, c=a2 so m1, m2 =
−a1±√a12−4 ∙ a22
)
- So we have two solutions (once m1, m2 calculated), i.e. one for each root:Call solutions: Cm1
t or Bm2t (constant depends on the root so write C and B
1

instead of just A)
General solution: Cm1t + Bm2
t
i.e. if Cm1t or Bm2
t are both solutions then:
Cm1t + a1 Cm1
t-1+ a2 Cm1t-2 =0 and
Bm2t + a1 Bm2
t-1+ a2 Bm2t-2 =0
adding the last two equations:
[Cm1t + Bm2
t] + a1 [Cm1t-1 + Bm2
t-1 ] + a2 [Cm1t-2 + Bm2
t-2 ] = 0
so Cm1t + Bm2
t is a solution too with the earlier solutions as special cases.
Particular solution: constants C and B can be obtained if the initial values of the sequence are known (y0 and y1)
i.e. set general solution equal to start value in the appropriate period – two eqns to solve for A and B (see example below).
Example: (Goldberg)yt -5 yt-1 + 6 yt-2 = 0
so: m2-5m+6 = 0 then roots: m1,m2= 5±√(−5)2−4 ∙1∙62∙1
m1=2, m2=3
General solution : Cm1t + Bm2
t = C 2t + B 3t
If initial values y0 and y1 are given C and B can be obtained:y0=C 20 + B 30 =C+B (since t=0)y1=C 21 + B 31 =2C+3B (since t=1)
2 equations : y0= C+B and y1= 2C+3B solve for B=y1-2y0 , C=3y0-y1
Particular solution : C 2t + B 3t = (3y0-y1) 2∙ t + (y1-2y0) 3∙ t
- To solve for the sequence implied by the second order difference equation you need two start values (two periods ago and one period ago). The general solution can accommodate any two start values.
- The solutions Cm1t and Bm2
t are special cases of the general solution, i.e. cases with C or B equal to 0. For certain start values the solution collapses to these special cases while for the rest the solution is a linear combination of the two special cases. In economic applications we can
2

sometimes argue that a decision-maker will only choose initial values that place 0 weight on an unstable root. These are cases with ‘saddlepath’ dynamics.
3

Nature of the Solution to the 2 nd Order Difference Equation: What Dynamics are implied?
- General solution: Cm1t + Bm2
t
- Limiting behavior: how does the solution behave as t→∞?
i.e. given the form of the solution what does it imply about the sequence of y’s? Does it converge on the equilibrium? does it explode?
- To find the solution we needed the roots m1, m2 of: (m2+a1m+a2) = 0 i.e., m1, m2 = −a1±√a12−4 a2
2
- There are three cases: (1) Two real unequal roots: whena12−4 a2>0 ;
(2) a pair of complex roots: whena12−4 a2<0 ; and
(3) real equal roots: when whena12−4 a2=0 ;
Case 1: Real roots which are unequal (see example on p. 2)
- General solution applies: Cm1t + Bm2
t
- The absolutely larger of the two roots determines the limiting values.
- Say that |m1|>|m2| then Cm1t determines limiting behavior.
If |m1|<1 solution converges to 0 (oscillations if m1<0);
If |m1|>1 solution diverges from 0 (oscillations if m1<0)
If |m1|=1 solution converges to C if m1>0 and oscillates finitely (C and -C) if m1<0
- This assumes C≠0 (this may not be true for all initial values: depends on y0, y1).- if start values are such that C=0 then the m1 does not determine limiting
behavior and Bm2t is the solution. (See example below)
4

Case 2: Complex Roots (see Goldberg pp. 136-140 and p.172)
- General solution applies: Cm1t + Bm2
t but m1 and m2 are complex numbers: m1=a+bi and m2=a-bi
(where i=√−1, a=-a1/2, b=√4 ∙ a2−a122
)
- The complex roots can be written in ‘polar form’ (see diagram): m1=a+bi=r∙ (cos( + i sin( ) , m2=a+bi=r∙ (cos( - i sin( ) using a= r∙cos( and
b=r∙sin() where r =√a2+b2 = √a2
- We can calculate m12= [r∙ (cos( + i sin( )] [r∙ (cos( + i sin( )]
= r2 cos(cos(sin(sin(i sin(cos(
This can be written as: m12= r2 ∙(cos(2 + i sin(2 )
(this step uses the trigonometric identities: sin(+) = sin()cos()+cos()sin(), cos(+)=cos()cos()-sin()sin() (here ==)
- Similarly: m1t= rt ∙(cos(t + i sin(t ) m2
t= rt ∙(cos(t - i sin(t )
Then the general solution is: Cm1t + Bm2
t = C rt ∙(cos(t + i sin(t ) + B rt ∙(cos(t - i sin(t )
- A relevant solution returns real values for ‘y’. This requires that C and B be complex and of the
following form (where q and D are determined by initial values):C = q∙(cos(D)+i sin(D)) and B = q∙(cos(D)-i sin(D)) D=angle, q=constant
The general solution is then:Cm1
t + Bm2t =C rt ∙(cos(t + i sin(t ) + B rt ∙(cos(t - i sin(t )
Which, using the definitions of C and D and trigonometric identities, can be simplified to:Cm1
t + Bm2t = 2q rt cos(t∙ +D)
- Limiting behavior? - The solution depends on cos(t+D) which is periodic and bounded between 1 and -1.
So the solution oscillates.
5

- Dampened (convergent) oscillations if 0<r<1 this is analogous to |m1|,|m2| <1
(r =√a2+b2 plays the part of |m1|,|m2| in Case 1 (it determines the nature of the dynamics). Note that since m1=a+bi, m2=a-bi we have: m1∙m2 = r2. Using the quadratic formula solutions m1, m2 = −a1±√a12−4 ∙ a2
2 gives m1∙m2 =a2 so r2=a2)
Case 3: Real but equal roots m1=m2 (=-a1/2)
- In this case we can’t calculate C and B separately in the general solution:Cm1
t + Bm2t = (C+B) m1
t
- this solution can’t accommodate all possible pairs of starting values.
- There is another possible solution when roots of characteristic equation are equal: yt= tm1
t
(substitute this solution into the difference equation yt + a1 yt-1 + a2 yt-2 = 0 to see that it works and remember that m1
2 + a1m1 +a2= 0 and a12−4 a2=0 in this case)
- Then the general solution becomes:Cm1
t + B tm1t= (C+Bt)∙m1
t
- Divergent if |m1|≥1, convergent if |m1|<1, oscillates if it is negative.
- The sequence converges regardless of the start value if:Real roots and max( |m1|, |m2|)<1.Complex roots and 0<r<1
- Goldberg p. 150 summary remarks:
(1) the solution sequence, if convergent, may remain constant, steadily increase or decrease or exhibit dampened oscillations; if divergent it may steadily increase (to +∞) steadily decrease (to -∞) or exhibit steady (finite) or explosive (infinite) oscillations;
(2) the behavior of the solution depends upon both the difference equation and the initial conditions; and
(3) the roots of the auxiliary equations are important factors determining the limiting behavior of the solution.
6

- Stability of the Solution and the Coefficients of the 2nd Order Difference Equation:
- Given the form of the solution what does it imply about the sequence of y’s? - does it converge on the equilibrium (stable)? does it explode (unstable)?
- Similar to 1st order case: need absolute values of roots <1 for convergence; negative roots: oscillations.
- What conditions must the coefficients satisfy if stability is to be satisfied?
- If the equation has real roots that are not equal (Case 1):
Specifically: m2+a1m +a2=0
Roots: m1, m2 = −a1±√a12−4 ∙ a2
2
assuming we have real roots, |m1|<1 and |m2|<1 requires:
1+a1+a2>0 and 1-a1+a2>0 to ensure stability.
- If one of the conditions is satisfied and the other is not: one stable root and one unstable root.
- this can give a saddlepath result:- it only converges if initial conditions are such that the unstable root has no weight (coefficient on that root in the general solution is 0). Otherwise the solution explodes (see example)
- Case 3 (equal real roots) fits the conditions above but an even easier condition is to note that m1=-a1/2 when roots are equal so all you need is:
|m1|=|-a1/2|<1 for stability
- If the equation has complex roots:
- Here r<1 is needed for convergence which since r2=a2 implies a2<1 (or 1-a2>0)
7

- A Quick Check: looking at the coefficients can quickly indicate the nature of solution
If we have a linear, homogenous, second-order difference equation then write it in the form: yt + a1 yt-1 + a2 yt-2 = 0
The coefficients alone can tell you which case you have and indicate the limiting behavior
Case 1: Real, unequal roots if a12−4 a2>0 stable if 1+a1+a2>0 and 1-a1+a2>0
Case 2: Complex roots if a12−4 a2<0 stable if 1-a2>0
Case 3: Real, equal roots if a12−4 a2=0 stable if 1+a1+a2>0 and 1-a1+a2>0
(or since root=-a2/2 so stable if |-a2/2|<1)
Examples:
2yt+2 +3yt+1-2yt=0 rewrite as: yt+2 +1.5yt+1-yt=0 or equivalently: yt +1.5yt-1-yt-2=0 a12−4 a2=¿1.52-4(-1)>0 so its Case 1.
1+a1+a2=1+1.5-1>0 and 1-a1+a2=1-1.5-1<0 this is not stable for all starting values.
yt+2 -2yt+1+2yt=0 (or yt -2yt-1+2yt-2=0) a12−4 a2=¿(-2)2-4(2)<0 so its Case 2 – complex roots, 1-a2=1-2<0 so not stable.
yt+2 -1yt+1+0.25yt=0 (or yt -1yt-1+0.25yt-2=0) a12−4 a2=¿(-1)2-4(0.25)<= so its Case 3 – equal real roots, root=-a2/2=0.5 so its stable
(note that 1+a1+a2>0 and 1-a1+a2>0 holds here too).
8

- Diagrams: examples of possible solutions for the second-order difference equations
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20-0.2
0
0.2
0.4
0.6
0.8
1
1.2
yt+2+.2yt+1-.5yt=0 (Real roots, stable, m1=-.5)
1 2 3 4 5 6
-50-40-30-20-10
0102030
yt+2+2yt+1-5yt=0 (real roots, unstable, m1=-3.45)
1 2 3 4 5 6 7 8 9 10-0.2
0
0.2
0.4
0.6
0.8
1
1.2
yt+2-.5yt+1+.2yt=0 (Complex, 1-a2>0, stable)
9

1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20
-600-500-400-300-200-100
0100200300
yt+2-2yt+1-2yt=0 (Complex roots, 1-a2<0 unstable)
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20
-1.5
-1
-0.5
0
0.5
1
1.5
yt+2+yt=0 (Complex roots, 1-a2=0)
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 200
0.2
0.4
0.6
0.8
1
1.2
yt+2-yt+1+.25yt (Equal real roots, m1=0.5 (stable))
10

Example with two real roots and a saddlepath: 2yt+2 +3yt+1-2yt=0
Divide through by 2 to get: yt+2 +1.5yt+1-yt=0
So: m2+a1m+a2 = 0 with a1=1.5 and a2=-1
so: m2+1.5m-1 = 0 then roots: m1,m2= −1.5±√(1.5)2−4 ∙1∙(−1)2 ∙1
m1=0.5, m2=-2General solution: Cm1
t + Bm2t = C (.5)t + B (-2)t
If initial values y0 and y1 are given C and B can be obtained:y0=C (.5)0 + B (-2)0 =C+B (since t=0)y1= C (.5)1 + B (-2)1 = .5C -2B (since t=1)
2 equations : y0= C+B and y1= .5C-2B solve for C=.4y1+.8y0 , B=.2y0-.4y1
Particular solution : C 2t + B 3t = (.4y0+.8y1) (0.5)∙ t + (.2y1-.4y0) (-2)∙ t
Limiting behavior? Governed by the m2=-2 (absolutely larger of the two roots) unless initial values are such that B=.2y0-.4y1=0 (happens if y0=2y1).
(note conditions 1+a1+a2>0 is satisfied but 1-a1+a2>0 is not so this is a saddlepath case: convergence for only a subset of starting values)
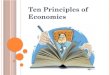
- For example (y on vertical axis, time on horizontal axis):
1 2 3 4 5 6 7 8 9 10
-60-40-20
020406080
100120
A case where initial values give non-zero C and B (m2=-2 drives the sequence, y0=y1=1)
11

1 2 3 4 5 6 7 8 9 100
0.20.40.60.8
11.2
A case where initial values give B=0 (so m1=0.5 drives the sequence, y0=1, y1=.5)
12

A System of 1 st Order Difference Equations and Second-Order Difference Equations :
- Two interdependent 1st order difference equations (a’s coefficients, z, y variables):
zt = a11 zt-1 +a12yt-1
yt = a21 zt-1 +a22yt-1
(Wickens p. 29-30 Dynamics of the Ramsey model has this form)
- This can be transformed into a 2nd-order difference equation:
- Use 1st eqn to eliminate yt-1 from second, this gives:
yt = (a22/a12)zt + [a21-(a22/a12)a11] zt-1 (so yt-1 gone!)
- Lag the result, i.e. in t-1: yt-1 = (a22/a12)zt-1 + [a21-(a22/a12)a11] zt-2
- substitute this for yt-1 in first equation so it is now in terms of z only and collect terms to give:
zt = (a11 +a22) zt-1 + (a12a21–a11a22) zt-2
i.e. a second-order difference equation.
- A solution this this second order equation in zt will also tell you how yt evolves by using: yt = (a22/a12)zt + [a21-(a22/a12)a11] zt-1
Non-homogenous second-order difference equations:
Say that we have: yt+2+a1yt+1+a2yt=d (d replaces 0 from our earlier case)
Solution strategy:
(1) solve the homogeneous part of the equation (yt+2+a1yt+1+a2yt=0): call the solution Y);
(2) find a particular solution to the non-homogenous case, a common choice would be the steady state solution if there is one (call it y*).
(3) Y+y* is a solution to general case. (4) given starting conditions solve for constants in general solution.
See Goldberg pp. 123. An example pp. 132-133 for yt+2 -3yt+1+2yt=-1
13

Appendix: Difference Equation Systems and Matrix Algebra
- Say that have a vector: ut (nx1) that evolves over time according to:
ut+1= A ut where A is nxn matrix of constants.
This is a system of first-order difference equations.
Then if we know the starting value (u0): u1 = Au0
u2 = A∙Au0 = A2 u0
.
.ut = At u0
The eigenvalues (i) and eigenvectors (xi) of the matrix A satisfy:A xi = i xi xi is an nx1 vector, i a constant
Define S as the nxn matrix whose columns are the eigenvectors (x1, x2, …. xn) And is an nxn diagonal matrix whose diagonal elements are 1 …n
Then: A xi = i xi
Implies A [x1 x2 …. xn] = [1 x1… 1 x1]
Or: A S = S then if the inverse of S exists: A = S S-1
Using this: u1 = Au0 = S S-1 u0
u2 = A2 u0 = (S S-1) S S-1 u0 = S S-1 u0
ut = At u0= S t S-1 u0
So if you solve for the eigenvalues and eigenvectors of A and you know the initial value of u then the sequence ut follows:
ut = S t S-1 u0
If there are n-independent eigenvectors u0 can be expressed as a linear combination of these eigenvectors:
u0 = S c where c is vector of constants (c1, ..cn)
Then: ut = S t S-1 u0 = = S t S-1S c = S tc
Writing this out:ut = c11
k x1 + c22k x2 + …+ cnn
k xn
This is convenient: it is much like the solution to the second-order difference equation.
So if you have solved for the eigenvectors and eigenvalues and know u0 you can find c (using u0 = S c ).
14

The eigenvalues are key to how the system evolves. The absolutely largest eigenvalue:max(|1|,|2|,…,|n|)
determines the limiting behavior of the system. If it’s absolute value >1 system is divergent; is convergent if <1. If it is negative, you also get oscillations.
But initial conditions matter too: if conditions are such that the constant ‘c’ on the absolutely largest eigenvalue is 0, then that eigenvalue no longer drives the system.
- A number of interesting cases can be fit into this framework.
- It can be applied to multivariate systems.
- Here the elements of ut are values of different variables in time t.
- For example: zt = a11 zt-1 +a12yt-1
yt = a21 zt-1 +a22yt-1
ut = [ zty t] then ut-1 = [ z t−1y t−1] and ut = A ut-1 where A =[a11 a12a21 a22]
(Possible examples: linear approximation of the Ramsey model and this; a Markov transitions models)
- By defining the elements of ut to be lags of the same variable a higher-order difference equation can be written in the form above:
yt = a1 yt-1 + a2 yt-2
Define: ut = [ y ty t−1] then ut-1 = [ y t−1y t−2] and ut = A ut-1 where A =[a1 a21 0 ]
(notice ut = A ut-1 gives 2 equations the 2nd order difference equation and an identity yt-1=yt-1)
This can be solved by finding eigenvalues and eigenvectors and will give the same solution as the earlier method (note that the eigenvalues are the roots m1, m2).
(Attraction of this method: ability to apply to higher-order cases)
15

Example with two real roots and a saddlepath: 2yt+2 +3yt+1-2yt=0 (Solution using Eignevalues)
Divide through by 2 to get: yt+2 +1.5yt+1-yt=0
- Now use the alternative method: yt+2 +1.5yt+1-yt=0 or two periods earlier yt +1.5yt-1-yt-2=0
Define: ut = [ y ty t−1] then ut-1 = [ y t−1y t−2] and ut = A ut-1 where A =[−1.5 11 0 ]
Find the eigenvalues of A: (A-I) = [−1.5− λ 11 −λ ] , I=identity matrix
Set determinant of A-I=0, det(A-I) = 2+1.5-1 =0
Solve for the roots of this equation (it’s the same one as in our earlier method!) so the roots are 0.5 and -2.
The eigenvectors (x) satisfy: (A-I) x = 0
For =.5: [−1.5−.5 11 −.5] [x11x12 ]=[00] so [ x11x12]=[12] will work yt
For =-2: [−1.5+2 11 2] [x21x22]=[00] so [ x21x22]=[ 2−1] will work
The solution is of the form: ut = c11t x1 + c22
t x2
[ y ty t−1]= c11t[ x11x12 ]+ c22
t[ x21x22]
[ y ty t−1]= c1t[12]+ c2(-t[ 2−1]yt = c1t+2c2(-t
The c’s can be found if we have initial values y0 and y1: t=0 y0 = c1 +2c2 t=1 y1 = .5c1 -4c2
solving for c1, c2gives: c1=.8y0+.4y1 and c2=.1y0-.2y1
16

and then: yt = c1t+2c2(-t =(.4y0+.8y1) (0.5)∙ t + (.2y1-.4y0) (-2)∙ t
(same result as with the earlier method)
Examples:
- Goldberg pp. 148-149 has two of the three types (unequal real root example): try graphing these.2yt+2 +3yt+1-2yt=0 has roots -2, ½ considers limits for different starts
- p. 135 has an example of each of the three types (only takes it to pt where solves for roots)yt+2 -3yt+1+2yt=0 has roots 1, 2 p.136 gives general solution, p. 148 looks at two different initial
conditionsyt+2 -2yt+1+yt=0 has two equal roots (1,1),continues with it p.137yt+2 +yt=0 has complex roots m1=I, and m2=-I (continues with it p.140, 149)
- p. 141 yt+2 -2yt+1+2yt=0 has complex roots m1=1+i, m2=1-I and gives the general solution - p. 153 yt+2 -yt+1+0.5yt=1 has complex roots for homog version and is linked to an economic example. (p. 173 a version of the same model without coeffs specified --- work out conditions for stability). Actually Chiang does this one too pp. 588-593.
Some References:
Samuel Goldberg Introduction to Difference Equations
A. Chiang Fundamental Methods of Mathematical Economics (any edition: chapters on difference equations Ch. 16,17)
A. Siebert Lecture on Difference Equations (course website)
17