Embed Size (px)
Citation preview

Signal-To-Noise Calculation Per Cadence
• For each cadence, Where – is the image model fit to the PRF – is the actual pixel data including all background (this is the shot
noise term) – is the non-shot noise (read noise + quantization noise) – is over each pixel in the aperture of size
• Find Pixel Adding Order –Rank pixels by descending SNR
• Begin with first pixel then find the neighboring pixel that increases SNR the most using the above equation… working outwards until all pixels in the mask are included.
• This generates a SNR curve as a function of number of pixels in the aperture. The maximum of the curve gives the optimal SNR aperture.
s̃y
�i
SNRk =⌃k
i s̃ip⌃k
i yi + i�2
k
At measurement time t, each background-subtracted pixel x,y within the aperture is modeled as a linear mixture of responses to each point source in the scene. Let fT denote the total flux from the target star and fB1, fB2, … fBN denote the total fluxes from each background object in the vicinity. Within a measurement interval the flux from each star is distributed among pixels according to the system PSF and spacecraft motion, while the conversion of flux to measurement value is determined by the detector responsivity function. The combined effects of flux distribution and pixel responsivity are captured by the Kepler Pixel Response Function (PRF). In the equation below, PRFT(x, y, t) is shorthand for the expected response at pixel (x, y) and time t due to the target star.
With the loss of two spacecraft reaction wheels precluding further data collection in the primary mission, even greater pressure is placed on the processing pipeline to eke out every last transit signal in the data. To that end, we have developed a new method to optimize the Kepler Simple Aperture Photometry photometric apertures for both planet detection and minimization of systematic effects. The approach uses a per cadence modeling of the raw pixel data and then performs an aperture optimization based on the Kepler Combined Differential Photometric Precision (CDPP), which is a measure of the noise over the duration of a reference transit signal. We have found the new apertures to be superior to the standard Kepler apertures. We can now also find a per cadence Flux Fraction in Aperture and Crowding Metric. A modification of this new approach has also been proven robust at finding apertures in K2 data that mitigate the larger motion-induced systematics in the photometry.
Finding Every Planet We Can -- !Improving the Optimal Apertures in Kepler Data
Jeffrey C. Smith , Robert Morris, Jon Jenkins, Steve Bryson, Doug Caldwell, Shawn SeaderSETI Institute / NASA Ames Research Center
PRF Image Modelling
6 8 10 12 14 16 18−1
−0.8
−0.6
−0.4
−0.2
0
0.2
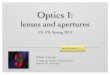
0.4Relative Improvement in CDPP vs Target Magnitude; Q15 2.1
Kepler Target Magnitude [Kp]
Rel
ativ
e Im
prov
emen
t in
CD
PP
CDPP improvement fairly uniform over all stellar magnitudes
−0.4 −0.3 −0.2 −0.1 0 0.10
20
40
60
80
100
120
140Relative Improvement in CDPP from TAD−COA and PA−COA, Kepler Prime PA V&V 9.2 data Q15 2.1
Relative change in CDPP from TAD−COA to PA−COA
Long tail of targets with significantly improved CDPP
CDPP:
• Simply speaking, CDPP is a whitened estimate of how well a transit-like signal can be detected in a stellar light curve. –A CDPP of 100 ppm means given a pure white
Gaussian signal, a 100 ppm transit signal has a detection statistic of 1 sigma.
–Detection probability is therefore inversely proportional to CDPP • A 10% improvement in CDPP results in a 10% improvement in detection (I.e. a 1.0 sigma detection becomes 1.1 sigma).
• The best aperture for planet detection is the aperture with the lowest CDPP and lowest crowding.
Detection Statistic =
Transit Depth
CDPP
pNtransits
Application to K2 data (2-Wheel Kepler)
• K2 data has dramatically more motion due to the roll drift • The optimal aperture consequently drifts over time
–Ideally, we would allow the aperture to drift or use a weighted aperture
–But the Kepler mission is committed to simple apertures • Therefore the apertures need to be opened up to account
for the drift. –This is performed by taking the union of each aperture
found from the SNR test on each cadence. … actually, four apertures are calculated and the one with the lowest CDPP is chosen (see flow chart above). Most of the time, for K2 data, the union aperture is chosen
Results
• Preliminary results show a mean reduction in CDPP of 5.5% versus old Kepler apertures –With some targets showing greater than 20%
reduction in CDPP. • Also consistently showing a reduction in focus and
motion - based systematics. –Better apertures means less work removing
systematics. • Also generates a per cadence Flux Fraction in aperture
and Crowding Metric in aperture. • Additionally provides updated magnitudes, RAs and
Declinations for the catalog. • Will be utilized in the next Kepler Pipeline release for
both 4-wheel Kepler and K2 (2-wheel).
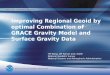
Optimizing the ApertureFind OA per
cadence using SNR
PRF Image Modelling
For Each Cadence
Find Pixel Adding Order based on SNR
Find Aperture to Maximize SNR
iCadence
Find median aperture and median pixel adding order
Find Union Aperture
Optimize Aperture with CDPP using
Pixel Adding Order
Pixel AddingOrder
Force Contiguous Apertures
Pixel Data Time Series
Select Best AperturePick which aperture has lowest CDPP
TADAperture
UnionAperture
Median SNRAperture
CDPP OptimizedAperture
Find Flux Fraction and Crowding Metric per Cadence
Optimal Aperture Photometry
Calculate SNR
PRF Model
Image Motion Model
Centroid Positions
Normalized PRFs
Optimal Aterture
Scene ModelRA, Dec, and magnitude
target flux flux from background objects
CCD Row CCD Column
CCD Row CCD Column
!"#$%&'()"#*+(,&-(.%/&&!"#$%&$#'()*#+,'!"#!#$%&!!'!&()*!+(),-./012340+#.()#&2!5$6&7!"'#!+&7/1-$1-!#/!(1!(5&.#0.&!$4!%/2&7&2!(4!(!7$1&(.!%$6#0.&!/8!.&45/14&4!#/!&()*!5/$1#!4/0.)&!$1!#*&!4)&1&!5704!(!9:!/884&#!#&.%;!!$%&'()*+$!,-.!/()01+"<"'!#'!!=!>!200*/!<!=!!?!0@<!=!ABC@<"'!#'!!=!?!DDD!?!0E<!=!ABCE<"'!#'!!=!!F*&.&!#*&!)/&88$)$&1#4!0@'!DDD!0E!2&1/#&!#*&!#/#(7!8706!/8!4#(.4!)/1#.$+0#$1-!#/!#*&!/+4&.G&2!(5&.#0.&!(12!ABC1<"'!#'!!=!$4!4*/.#*(12!8/.!#*&!ABC!&G(70(#&2!(#!#*&!)&1#./$2!)6'!)H!/8!#*&!1#*!)/1#.$+0#$1-!4#(.!(4!2&#&.%$1&2!+H!$#4!)&7&4#$(7!)//.2$1(#&4!(12!#*&!%/#$/1!%/2&7!ABC1<"'!#'!!=!>!ABC<"'!#34!54."<,-1'!(/.1='!)H<,-1'!(/.1==D!I*&!ABC!%/2&7!&65.&44&4!*/F!8706!8./%!(!-$G&1!4/0.)&!$4!2$4#.$+0#&2!(%/1-!5$6&74D!!!!
!
bkgnd _ subtracted _ flux(x,y,t) =
fT (t)PRFT (x,y, t) + fB1 (t)PRFB1 (x,y,t) +!+ fBN (t)PRFBN (x,y,t) '''()%-).'()*#+''I*&!$%(-&!%/#$/1!%/2&7!2&4).$+&4!*/F!)&7&4#$(7!)//.2$1(#&4!(.&!%(55&2!/1#/!#*&!5$6&7!-.$2!/8!#*&!5*/#/%&#&.!)*(11&7!(12!$4!2&.$G&2!(4!8/77/F4;!!!
@D J&7&)#!(!4&#!/8!KLMM!4#(.4!2$4#.$+0#&2!()./44!#*&!)*(11&7D!N2&(77H!#*&4&!4#(.4!4*/072!+&!01)./F2&2!(12!+.$-*#!+0#!1&G&.!4(#0.(#$1-!#*&!2&#&)#/.4D!
LD 9&#&.%$1&!#*&!)&1#./$2!5/4$#$/14!/8!4&7&)#&2!4#(.4!/1!#*&!5$6&7!-.$2!+H!8$##$1-!ABC!%/2&74!#/!#*&!2(#(D!OD C$#!L9!5/7H1/%$(74!4&5(.(#&7H!#/!#*&!)&1#./$2!./F4!(12!)/70%14;!
Optimal Aterture
Finding the Optimal Aperture
• The former optimal apertures in Kepler were found using a pure PRF model based on the catalog –Errors in the catalog result in errors in the aperture. –Unknown background noise/targets are also not be included.
• The new apertures proposed here are found using the real data.
1. First, Maximize the Signal-To-Noise ratio: •The numerator is from a model fit of the PRF to the background removed pixel data (See box at left)
–RA, Declination and Magnitude are updated in the fitting •The denominator is purely from the data, including background shot, read and quantization noise.
–This results in all actual sources of noise to be included 2. Then, optimize the number of pixels to minimize CDPP