Embed Size (px)
Citation preview
Vector Spaces in Physics 8/25/2015
1 - 1
Chapter 1. Vectors
We are all familiar with the distinction between things which have a direction and those
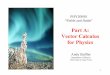
which don't. The velocity of the wind (see figure 1.1) is a classical example of a vector
quantity. There are many more of interest in physics, and in this and subsequent chapters
we will try to exhibit the fundamental properties of vectors.
Vectors are intimately related to the very nature of space. Euclidian geometry (plane
and spherical geometry) was an early way of describing space. All the basic concepts of
Euclidian geometry can be expressed in terms of angles and distances. A more recent
development in describing space was the introduction by Descartes of coordinates along
three orthogonal axes. The modern use of Cartesian vectors provides the mathematical
basis for much of physics.
A. The Displacement Vector
The preceding discussion did not lead to a definition of a vector. But you can convince
yourself that all of the things we think of as vectors can be related to a single fundamental
quantity, the vector r representing the displacement from one point in space to another.
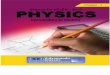
Assuming we know how to measure distances and angles, we can define a displacement
vector (in two dimensions) in terms of a distance (its magnitude), and an angle:
12
displacement from
point 1 to point 2
distance, angle measured counterclockwise from due East
r
(1-1)
(See figure 1.2.) Note that to a given pair of points corresponds a unique displacement,
but a given displacement can link many different pairs of points. Thus the fundamental
definition of a displacement gives just its magnitude and angle.
We will use the definition above to discuss certain properties of vectors from a strictly
geometrical point of view. Later we will adopt the coordinate representation of vectors
for a more general and somewhat more abstract discussion of vectors.
Figure 1-1. Where is the vector?
Vector Spaces in Physics 8/25/2015
1 - 2
B. Vector Addition
A quantity related to the displacement vector is the position vector for a point.
Positions are not absolute – they must be measured relative to a reference point. If we
call this point O (the "origin"), then the position vector for point P can be defined as
follows:
displacement from point O to point PPr (1-2)
It seems reasonable that the displacement from point 1 to point 2 should be expressed in
terms of the position vectors for 1 and 2. We are be tempted to write
1212 rrr
(1-3)
A "difference law" like this is certainly valid for temperatures, or even for distances along
a road, if 1 and 2 are two points on the road. But what does subtraction mean for
vectors? Do you subtract the lengths and angles, or what? When are two vectors equal?
In order to answer these questions we need to systematically develop the algebraic
properties of vectors.
We will let A
, B
, C
, etc. represent vectors. For the moment, the only vector
quantities we have defined are displacements in space. Other vector quantities which we
will define later will obey the same rules.
Definition of Vector Addition. The sum of two vector displacements can be defined so
as to agree with our intuitive notions of displacements in space. We will define the sum
of two displacements as the single displacement which has the same effect as carrying out
the two individual displacements, one after the other. To use this definition, we need to
be able to calculate the magnitude and angle of the sum vector. This is straightforward
using the laws of plane geometry. (The laws of geometry become more complicated in
three dimensions, where the coordinate representation is more convenient.)
Let A
and B
be two displacement vectors, each defined by giving its length and angle:
).,(
),,(
B
A
BB
AA
(1-4)
point
1
point
2
r
east
angle
distance
Figure 1-2. A vector, specified by giving a distance and an angle.
Vector Spaces in Physics 8/25/2015
1 - 3
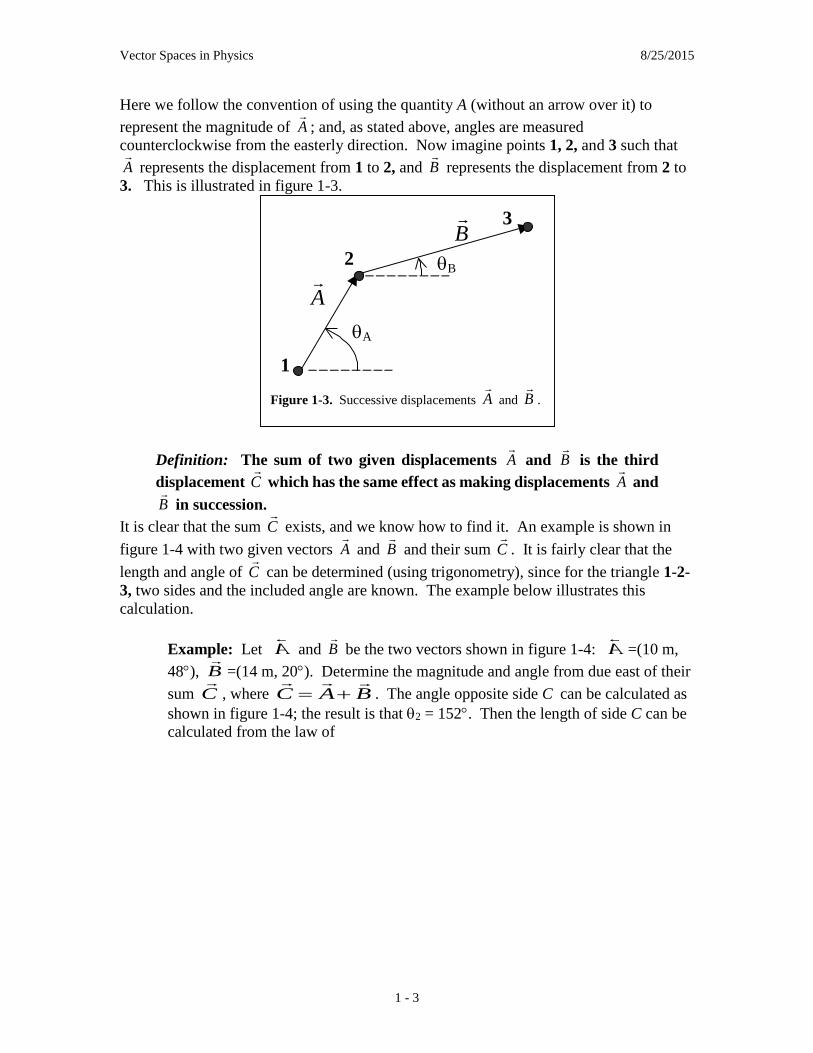
Here we follow the convention of using the quantity A (without an arrow over it) to
represent the magnitude of A
; and, as stated above, angles are measured
counterclockwise from the easterly direction. Now imagine points 1, 2, and 3 such that
A
represents the displacement from 1 to 2, and B
represents the displacement from 2 to
3. This is illustrated in figure 1-3.
Definition: The sum of two given displacements A
and B
is the third
displacement C
which has the same effect as making displacements A
and
B
in succession.
It is clear that the sum C
exists, and we know how to find it. An example is shown in
figure 1-4 with two given vectors A
and B
and their sum C
. It is fairly clear that the
length and angle of C
can be determined (using trigonometry), since for the triangle 1-2-
3, two sides and the included angle are known. The example below illustrates this
calculation.
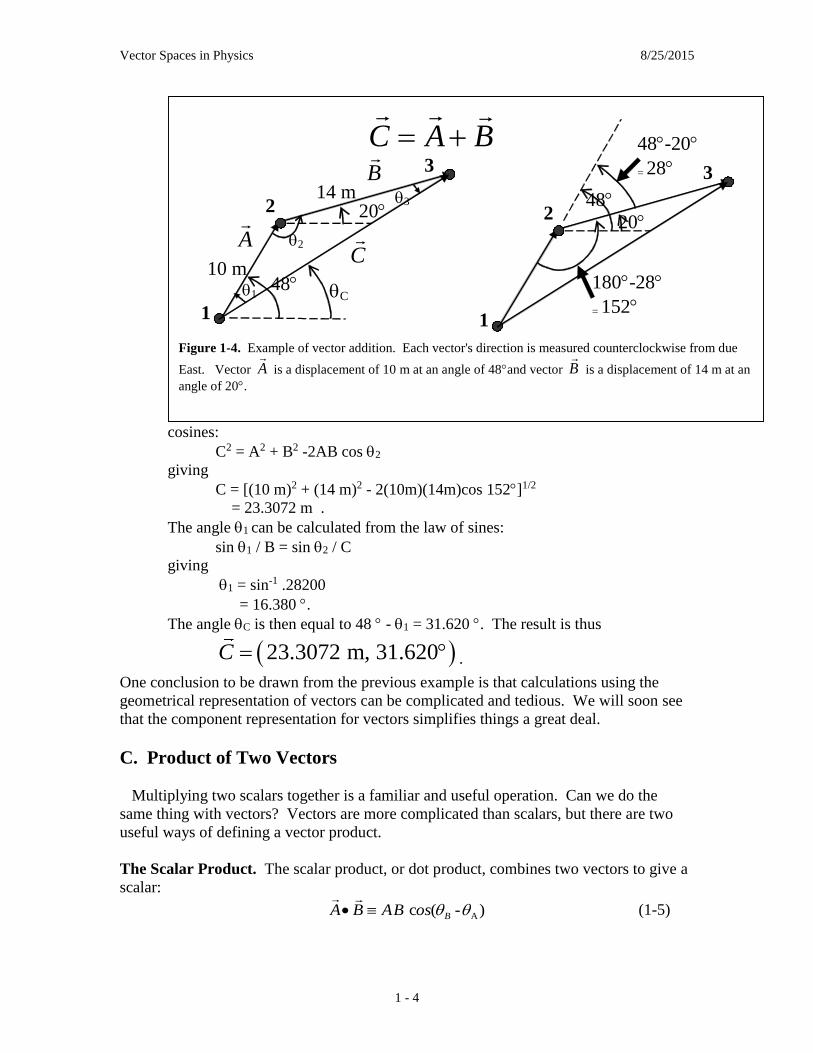
Example: Let A
and B
be the two vectors shown in figure 1-4: A
=(10 m,
48), B
=(14 m, 20). Determine the magnitude and angle from due east of their
sum C
, where BAC
. The angle opposite side C can be calculated as
shown in figure 1-4; the result is that 2 = 152. Then the length of side C can be
calculated from the law of
A
B
1
2
3
A
B
Figure 1-3. Successive displacements A
and B
.
Vector Spaces in Physics 8/25/2015
1 - 4
cosines:
C2 = A2 + B2 -2AB cos 2
giving
C = [(10 m)2 + (14 m)2 - 2(10m)(14m)cos 152]1/2
= 23.3072 m .
The angle 1 can be calculated from the law of sines:
sin 1 / B = sin 2 / C
giving
1 = sin-1 .28200
= 16.380 .
The angle C is then equal to 48 - 1 = 31.620 . The result is thus
23.3072 m, 31.620C .
One conclusion to be drawn from the previous example is that calculations using the
geometrical representation of vectors can be complicated and tedious. We will soon see
that the component representation for vectors simplifies things a great deal.
C. Product of Two Vectors
Multiplying two scalars together is a familiar and useful operation. Can we do the
same thing with vectors? Vectors are more complicated than scalars, but there are two
useful ways of defining a vector product.
The Scalar Product. The scalar product, or dot product, combines two vectors to give a
scalar:
)-(c ABosBABA
(1-5)
48
20
1
2
3
A
B
C
10 m
14 m
C
BAC
1
3
2
48
20
1
2
3
48-20
= 28
180-28
= 152
Figure 1-4. Example of vector addition. Each vector's direction is measured counterclockwise from due
East. Vector A
is a displacement of 10 m at an angle of 48and vector B
is a displacement of 14 m at an
angle of 20.
Vector Spaces in Physics 8/25/2015
1 - 5
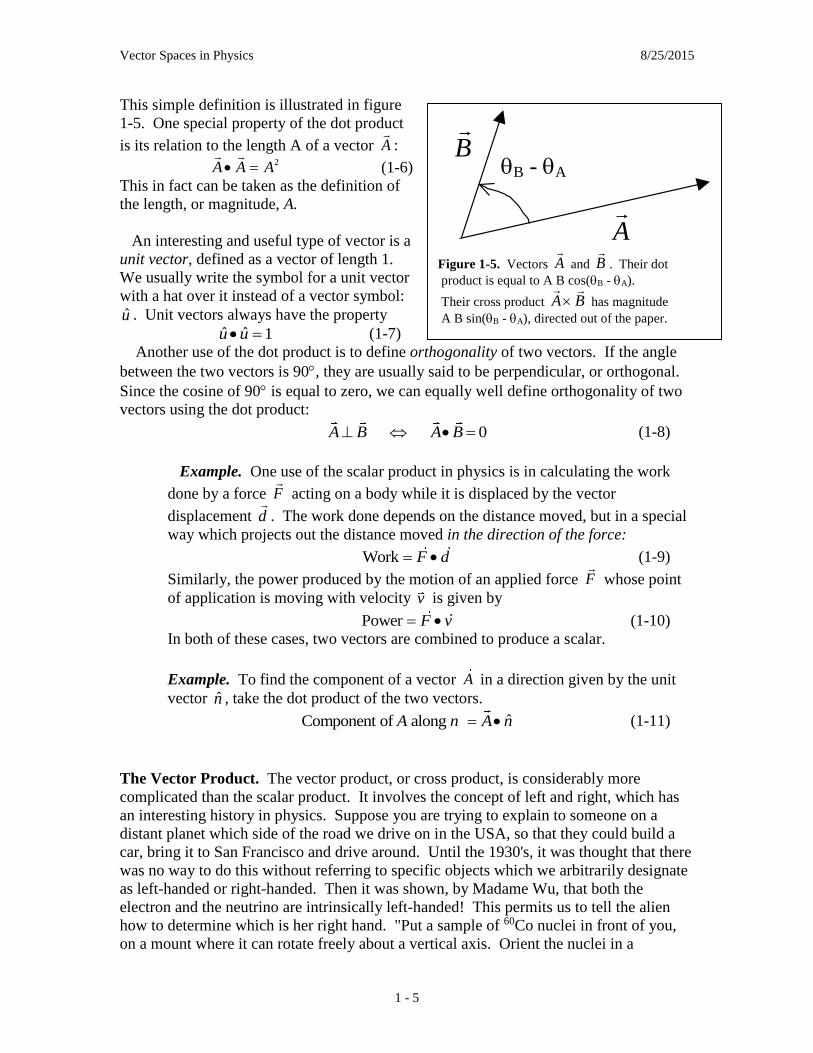
This simple definition is illustrated in figure
1-5. One special property of the dot product
is its relation to the length A of a vector A
:
2AAA
(1-6)
This in fact can be taken as the definition of
the length, or magnitude, A.
An interesting and useful type of vector is a
unit vector, defined as a vector of length 1.
We usually write the symbol for a unit vector
with a hat over it instead of a vector symbol:
u . Unit vectors always have the property
1ˆˆ uu (1-7)
Another use of the dot product is to define orthogonality of two vectors. If the angle
between the two vectors is 90, they are usually said to be perpendicular, or orthogonal.
Since the cosine of 90 is equal to zero, we can equally well define orthogonality of two
vectors using the dot product:
0A B A B (1-8)
Example. One use of the scalar product in physics is in calculating the work
done by a force F
acting on a body while it is displaced by the vector
displacement d
. The work done depends on the distance moved, but in a special
way which projects out the distance moved in the direction of the force:
Work F d (1-9)
Similarly, the power produced by the motion of an applied force F
whose point
of application is moving with velocity v is given by
Power F v (1-10)
In both of these cases, two vectors are combined to produce a scalar.
Example. To find the component of a vector A in a direction given by the unit
vector n , take the dot product of the two vectors.
ˆComponent of along A n A n (1-11)
The Vector Product. The vector product, or cross product, is considerably more
complicated than the scalar product. It involves the concept of left and right, which has
an interesting history in physics. Suppose you are trying to explain to someone on a
distant planet which side of the road we drive on in the USA, so that they could build a
car, bring it to San Francisco and drive around. Until the 1930's, it was thought that there
was no way to do this without referring to specific objects which we arbitrarily designate
as left-handed or right-handed. Then it was shown, by Madame Wu, that both the
electron and the neutrino are intrinsically left-handed! This permits us to tell the alien
how to determine which is her right hand. "Put a sample of 60Co nuclei in front of you,
on a mount where it can rotate freely about a vertical axis. Orient the nuclei in a
A
B
B - A
Figure 1-5. Vectors A
and B
. Their dot
product is equal to A B cos(B - A).
Their cross product BA
has magnitude
A B sin(B - A), directed out of the paper.
Vector Spaces in Physics 8/25/2015
1 - 6
magnetic field until the majority of the decay electrons go downwards. The sample will
gradually start to rotate so that the edge nearest you moves to the right. This is said to be
a right-handed rotation about the vertically upward axis." The reason this works is that
the magnetic field aligns the cobalt nuclei vertically, and the subsequent nuclear decays
emit electrons preferentially in the opposite direction to the nuclear spin. (Cobalt-60
decays into nickel-60 plus an electron and an anti-electron neutrino,
60 60
eCo Ni e ν (1-12)
See the Feynman Lectures for more information on this subject.) Now you can just tell
the alien, "We drive on the right." (Hope she doesn't land in Australia.)
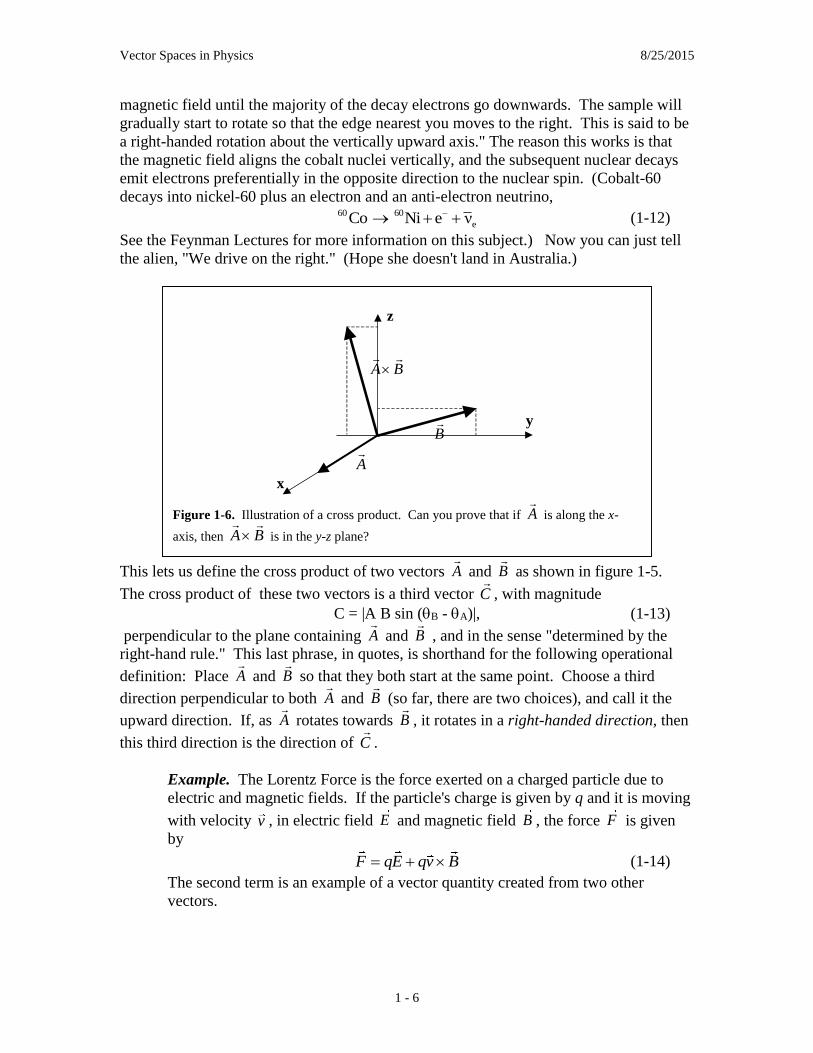
This lets us define the cross product of two vectors A
and B
as shown in figure 1-5.
The cross product of these two vectors is a third vector C
, with magnitude
C = |A B sin (B - A)|, (1-13)
perpendicular to the plane containing A
and B
, and in the sense "determined by the
right-hand rule." This last phrase, in quotes, is shorthand for the following operational
definition: Place A
and B
so that they both start at the same point. Choose a third
direction perpendicular to both A
and B
(so far, there are two choices), and call it the
upward direction. If, as A
rotates towards B
, it rotates in a right-handed direction, then
this third direction is the direction of C
.
Example. The Lorentz Force is the force exerted on a charged particle due to
electric and magnetic fields. If the particle's charge is given by q and it is moving
with velocity v , in electric field E and magnetic field B , the force F is given
by
F qE qv B (1-14)
The second term is an example of a vector quantity created from two other
vectors.
A
B
BA
x
y
z
Figure 1-6. Illustration of a cross product. Can you prove that if A
is along the x-
axis, then BA
is in the y-z plane?

Vector Spaces in Physics 8/25/2015
1 - 7
Example. The cross product is used to find the direction of the third axis in a
three-dimensional space. Let u and v be two orthogonal unit vectors,
representing the first (or x) axis and the second (or y) axis, respectively. A unit
vector w in the correct direction for the third (or z) axis of a right-handed
coordinate system is found using the cross product:
ˆ ˆ ˆw u v (1-15)
D. Vectors in Terms of Components
Until now we have discussed vectors from a purely geometrical point of view. There is
another representation, in terms of components, which makes both theoretical analysis
and practical calculations easier. It is a fact about the space that we live in that it is
possible to find three, and no more than three, vectors that are mutually orthogonal. (This
is the basis for calling our space three dimensional.) Descartes first introduced the idea
of measuring position in space by giving a distance along each of three such vectors. A
Cartesian coordinate system is determined by a particular choice of these three vectors.
In addition to requiring the vectors to be mutually orthogonal, it is convenient to take
each one to have unit length.
A set of three unit vectors defining a Cartesian coordinate system can be chosen as
follows. Start with a unit vector i in any direction you like. Then choose any second
unit vector j which is perpendicular to i . As the third unit vector, take jik ˆˆˆ .
These three unit vectors )ˆ,ˆ,ˆ( kji are said to be orthonormal. This means that they are
mutually orthogonal, and normalized so as to be unit vectors. We will often refer to their
directions as the x, y, and z directions. We will also sometimes refer to the three vectors
as )ˆ,ˆ,ˆ( 321 eee , especially when we start writing sums over the three directions.
Suppose that we have a vector A
and three orthogonal unit vectors )ˆ,ˆ,ˆ( kji , all defined
as in the previous sections by their length and direction. The three unit vectors can be
used to define vector components of A
, as follows:
.ˆ
,ˆ
,ˆ
kAA
jAA
iAA
z
y
x
(1-16)
This suggests that we can start a discussion of vectors from a component view, by simply
defining vectors as triplets of scalar numbers:
x
y
z
A
A A
A
Component Representation of Vectors (1-17)
It remains to prove that this definition is completely equivalent to the geometrical
definition, and to define vector addition and multiplication of a vector by a scalar in terms
of components.
Vector Spaces in Physics 8/25/2015
1 - 8
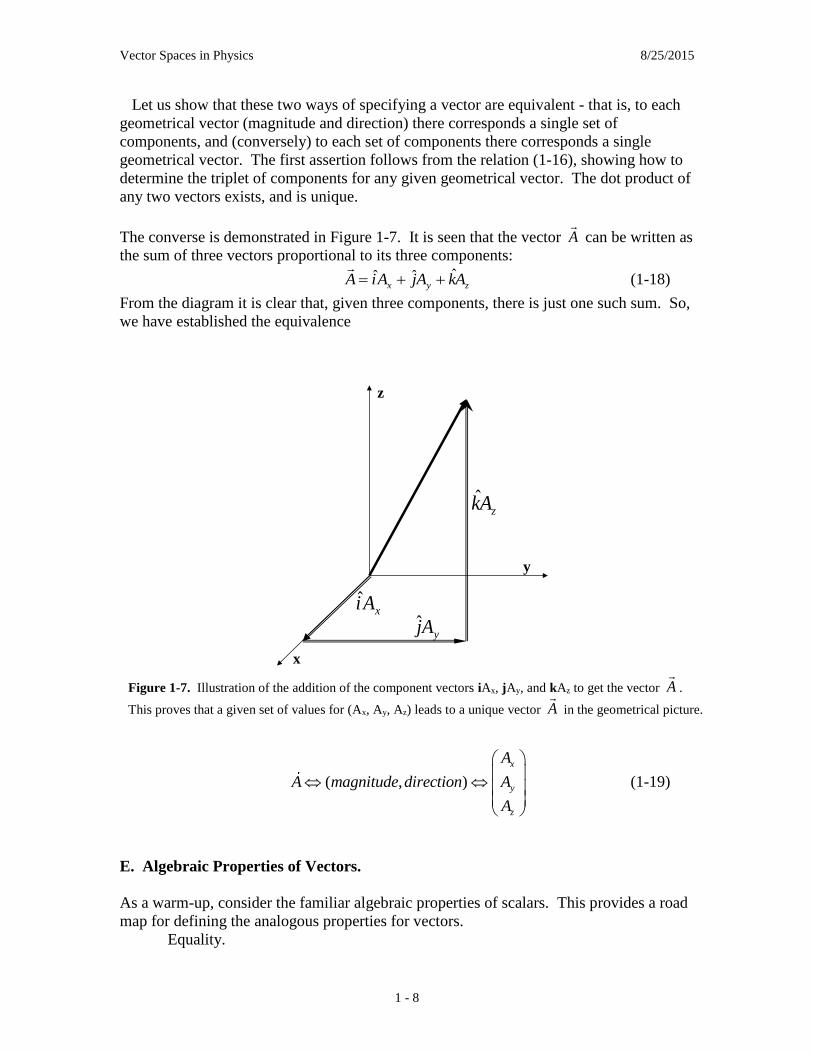
Let us show that these two ways of specifying a vector are equivalent - that is, to each
geometrical vector (magnitude and direction) there corresponds a single set of
components, and (conversely) to each set of components there corresponds a single
geometrical vector. The first assertion follows from the relation (1-16), showing how to
determine the triplet of components for any given geometrical vector. The dot product of
any two vectors exists, and is unique.
The converse is demonstrated in Figure 1-7. It is seen that the vector A
can be written as
the sum of three vectors proportional to its three components:
zyx AkAjAiA ˆˆˆ
(1-18)
From the diagram it is clear that, given three components, there is just one such sum. So,
we have established the equivalence
( , )
x
y
z
A
A magnitude direction A
A
(1-19)
E. Algebraic Properties of Vectors.
As a warm-up, consider the familiar algebraic properties of scalars. This provides a road
map for defining the analogous properties for vectors.
Equality.
x
y
z
xAi
yAj
zAk
Figure 1-7. Illustration of the addition of the component vectors iAx, jAy, and kAz to get the vector A
.
This proves that a given set of values for (Ax, Ay, Az) leads to a unique vector A
in the geometrical picture.

Vector Spaces in Physics 8/25/2015
1 - 9
and
a b b a
a b b c a c
Addition and multiplication of scalars.
( ) ( )
( ) ( )
( )
a b b a
a b c a b c a b c
ab ba
a bc ab c abc
a b c ab ac
Zero, negative numbers.
0
( ) 0
a a
a a
No surprises there.
Equality. We will say that two vectors are equal, meaning that they are really the same
vector, if all three of their components are equal:
, , .x x y y z zA B A B A B A B (1-20)
The commutative property, A B B A , and the transitive property,
and A B B C A C follow immediately, since components are scalars.
Vector Addition. We will adopt the obvious definition of vector addition using
components:
zzz
yyy
xxx
BAC
BAC
BAC
BAC
DEFINITION (1-21)
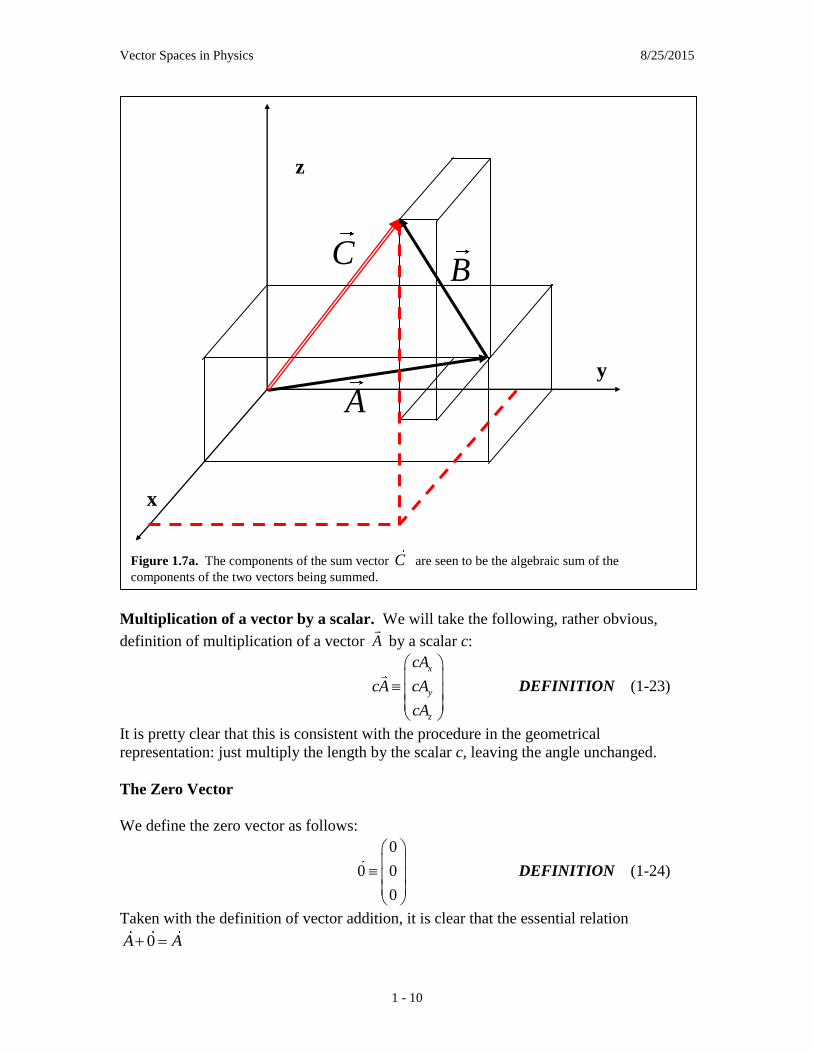
That is to say, the components of the sum are the sums of the components of the vectors
being added. It is necessary to show that this is in fact the same definition as the one we
introduced for geometrical vectors. This can be seen from the geometrical construction
shown in figure 1-7a.
Vector Spaces in Physics 8/25/2015
1 - 10
Multiplication of a vector by a scalar. We will take the following, rather obvious,
definition of multiplication of a vector A
by a scalar c:
x
y
z
cA
cA cA
cA
DEFINITION (1-23)
It is pretty clear that this is consistent with the procedure in the geometrical
representation: just multiply the length by the scalar c, leaving the angle unchanged.
The Zero Vector
We define the zero vector as follows:
0
0 0
0
DEFINITION (1-24)
Taken with the definition of vector addition, it is clear that the essential relation
0A A
y
z
x
A
B C
Figure 1.7a. The components of the sum vector C are seen to be the algebraic sum of the
components of the two vectors being summed.

Vector Spaces in Physics 8/25/2015
1 - 11
is satisfied. And a vector with all zero-length components certainly fills the bill as the
geometrical version of the zero vector.
The Negative of a Vector. The negative of a vector in terms of components is also easy
to guess:
x
y
z
A
A A
A
DEFINITION (1-26)
The essential relation 0A A will clearly be satisfied, in terms of components. It is
also easy to prove that this corresponds to the geometrical vector with the direction
reversed; we will also omit this proof.
Subtraction of Vectors. Subtraction is then defined by
( ) subtraction of vectorsA B A B (1-27)
That is, to subtract a vector from another
one, just add the vector's negative. The
"vector-subtraction parallelogram" for
two vectors A and B is shown in figure
1-8. The challenge is to choose the
directions of A and B such that the
diagonal correctly represents head-to-tail
addition of the vectors on the sides.
E. Algebraic properties of vector
addition.
Vectors follow algebraic rules similar to
those for scalars:
commutative property of vector addition
( ) ( ) ) associative property of vector addition
distributive property of scalar multiplication
another
A B B A
A B C A B C
a A B aA aB
a b A aA aB
distributive property
c associative property of scalar multiplicationdA cd A
(1-28)
In the case of geometrically defined vectors, these properties are not so easy to prove,
especially the second one. But for component vectors they all follow immediately (see
the problems). And so they must be correct also for geometrical vectors.
As an illustration, we will prove the distributive law of scalar multiplication, above, for
component vectors. We use only properties of component vectors.
AB
A
A
B
B BA
Figure 1-8. The vector-subtraction parallelogram.
Can you put arrows on the sides of the
parallelogram so that both triangles read as correct
vector-addition equations?

Vector Spaces in Physics 8/25/2015
1 - 12
( ) definition of addition of vectors
definition of multiplication by a scalar
distributive property of scalar
x x
y y
z z
x x
y y
z z
x x
y y
z z
A B
a A B a A B
A B
a A B
a A B
a A B
aA aB
aA aB
aA aB
multiplication
definition of addition of vectors
definition of multiplication of a vector by a scalar
x x
y y
z z
x x
y y
z z
aA aB
aA aB
aA aB
A B
a A a B
A B
aA aB QED
The proofs of the other four properties are similar.
F. Properties of a Vector Space.
Vectors are clearly important to physicists (and astronomers), but the simplicity and
power of representing quantities in terms of Cartesian components is such that vectors
have become a sort of mathematical paradigm. So, we will look in more detail at their
abstract properties, as members of a Vector Space.
In Table 1-1 we give a summary of the basic properties which a set of objects must have
to constitute a vector space.

Vector Spaces in Physics 8/25/2015
1 - 13
Notice that in the preceding box, vectors are not specifically defined. Nor is the method
of adding them specified. We will see later that there are many different classes of
objects which can be thought of as vectors, not just displacements or other three-
dimensional objects.
Example: Check that the set of all component vectors, defined as triplets of real
numbers, does in fact satisfy all the requirements to constitute a vector space.
Referring to Table 1-1, it is easy to see that the first four properties of a vector
space are satisfied:
1. Closure under addition. If
x
y
z
A
A A
A
and
x
y
z
B
B B
B
are both vectors, then so
is
x x
y y
z z
A B
C A B A B
A B
. This follows from the fact that the sum of two scalars
gives another scalar.
A vector space is a set of objects, called vectors, with the operations of addition of
two vectors and multiplication of a vector by a scalar defined, satisfying the
following properties.
1. Closure under addition. If A
and B
are both vectors, then so is .C A B
2. Closure under scalar multiplication. If A
is a vector and d is a scalar, then
B dA is a vector.
3. Existence of a zero. There exists a zero vector 0
, such that, for any vector A
,
AA
0 .
4. Existence of a negative. For any vector A
there exists a negative A
, such that
0)(
AA .
5. Algebraic Properties. Vector addition and scalar multiplication satisfy the
following rules:
(1-29) commutative
( ) ( ) (1-30) associative
( ) (1-31) distributive
(1-32) distr
A B B A
A B C A B C
a A B aA aB
a b A aA bA
ibutive
( ) (1-33) associativec dA cd A
Table 1-1. Properties of a vector space.

Vector Spaces in Physics 8/25/2015
1 - 14
2. Closure under multiplication. If A
is a vector and d is a scalar, then
x
y
z
dA
B dA dA
dA
is a vector. This follows from the fact that the product of two
scalars gives another scalar.
3. Zero. There exists a zero vector
0
0 0
0
, such that, for any vector A
,
0
0 0
0
x x
y y
z z
A
A A A
A
. This follows from the addition-of-zero property for
scalars.
4. Negative. For any vector A
there exists a negative
x
y
z
A
A A
A
, such that
0)(
AA . Adding components gives zero for the components of the sum.
5. The algebraic properties (1-29) through (1-33) were discussed above;
they are satisfied for component vectors.
So, all the requirements for a vector space are satisfied by component vectors.
This had better be true! The whole point of vector spaces is to generalize from
component vectors in three-dimensional space to a broader category of
mathematical objects that are very useful in physics.
Example: The properties above have clearly been chosen so that the usual
definition of vectors, including how to add them, satisfies these conditions. But
the concept of a vector space is intended to be more general. What if we define
vectors in two dimensions geometrically (having a magnitude and an angle) and
we keep multiplication by a scalar the same, but we redefine vector addition in the
following way.
( , )A BC A B A B (1-34)
This might look sort of reasonable, if you didn't know better. Which of the
properties (1)-(5) in Table 1-1 are satisfied?
1. Closure under addition: OK. A + B is an acceptable magnitude, and A +
B is an acceptable angle. (Angles greater than 360 are wrapped around.)
2. Closure under scalar multiplication: OK
3. Zero: the vector 0 (0,0) works fine; adding it on doesn't change A .
4. Negative: Not OK. There is no way to add two positive magnitudes
(magnitudes are non-negative) to get zero.
5. Algebraic properties: You can easily show that these are all satisfied.

Vector Spaces in Physics 8/25/2015
1 - 15
Conclusion: With this definition of vector addition, this is not a vector space.
G. Metric Spaces and the Scalar Product
The vector space as we have just defined it lacks something important. Thinking of
displacements, the length of a displacement, measuring the distance between two points,
is essential to describing space. So we want to add a way of assigning a magnitude to a
vector. This is provided by the scalar product.
The scalar product. The components of two vectors can be combined to give a scalar as
follows:
zzyyxx BABABABA
DEFINITION (1-40)
It is easy to show that the result follows from the representation of A
and B
in terms of
the three unit vectors of the Cartesian coordinate system:
zzyyxx
zyxzyx
BABABA
BkBjBiAkAjAiBA
)ˆˆˆ()ˆˆˆ(
where we have used the orthonormality of the unit vectors, 1ˆˆˆˆˆˆ kkjjii ,
0ˆˆˆˆˆˆ kjkiji . From the above definition in terms of components, it is easy to
demonstrate the following algebraic properties for the scalar product:
1-13
1-14
1-15
A B B A
A B C A B A C
A aB a A B
The inner product of a displacement with itself can then be used to define a distance
between points 1 and 2:
2 2 2
12 12 12 12 12 12r r r x y z (1-41)
From this expression we see that the distance between two points will not be zero unless
they are in fact the same point.
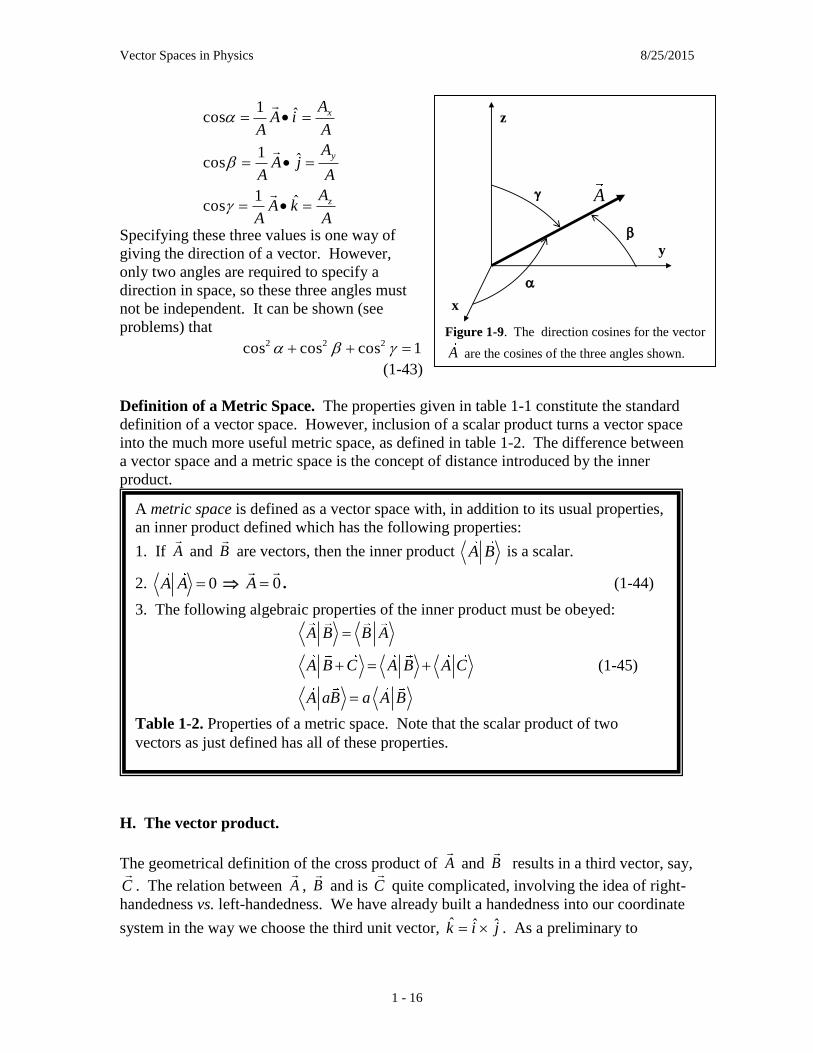
The scalar product can be used to define the direction cosines of an arbitrary vector,
with respect to a set of Cartesian coordinate axes. The direction cosines are defined as
follows (see figure 1-9):
DIRECTION COSINES , , and of a vector A
(1-42)
Vector Spaces in Physics 8/25/2015
1 - 16
A
AkA
A
A
AjA
A
A
AiA
A
z
y
x
ˆ1cos
ˆ1cos
ˆ1cos
Specifying these three values is one way of
giving the direction of a vector. However,
only two angles are required to specify a
direction in space, so these three angles must
not be independent. It can be shown (see
problems) that
1coscoscos 222
(1-43)
Definition of a Metric Space. The properties given in table 1-1 constitute the standard
definition of a vector space. However, inclusion of a scalar product turns a vector space
into the much more useful metric space, as defined in table 1-2. The difference between
a vector space and a metric space is the concept of distance introduced by the inner
product.
H. The vector product.
The geometrical definition of the cross product of A
and B
results in a third vector, say,
C
. The relation between A
, B
and is C
quite complicated, involving the idea of right-
handedness vs. left-handedness. We have already built a handedness into our coordinate
system in the way we choose the third unit vector, jik ˆˆˆ . As a preliminary to
A metric space is defined as a vector space with, in addition to its usual properties,
an inner product defined which has the following properties:
1. If A
and B
are vectors, then the inner product A B is a scalar.
2. 0A A 0
A . (1-44)
3. The following algebraic properties of the inner product must be obeyed:
A B B A
A B C A B A C
A aB a A B
(1-45)
Table 1-2. Properties of a metric space. Note that the scalar product of two
vectors as just defined has all of these properties.
A
x
y
z
Figure 1-9. The direction cosines for the vector
A are the cosines of the three angles shown.

Vector Spaces in Physics 8/25/2015
1 - 17
evaluating the cross product BA
, we work out the various cross products among the
unit vectors kji ˆ,ˆ,ˆ . From equation (1-17) we see that the cross product of two
perpendicular unit vectors has magnitude 1. We use the right-hand rule and refer to
figure 1-11 to get the direction of the cross products. This gives
jki
ijk
kij
jik
ikj
kji
ˆˆ
ˆˆˆ
ˆˆˆ
ˆˆˆ
ˆˆˆ
ˆˆˆ
(1-46)
Now it is straight forward to evaluate BA
in terms of components:
;ˆˆˆˆˆˆ
ˆˆˆˆˆˆ
iBAjBAiBAkBAjBAkBA
BkBjBiAkAjAiBA
yzxzzyxyzxyx
zyxzyx
(1-47)
This is not as hard to memorize as you might think - stare at it for a while and notice
permutation patterns (yz vs. zy, etc.) Later on we will have some other, even more
elegant ways of writing the cross product.
The cross product is used to represent a number of interesting physical quantities - for
example, the torque, Fr
, and the magnetic force, BvqF
, to name just a
couple.
The cross product satisfies the following algebraic properties:
(1-48)
( ) (1-49)
( ) ( ) (1-50)
A B B A
A B C A B A C
A aB a A B
Note that the order matters; the cross product is not commutative.
I. Dimensionality of a vector space and linear independence.
In constructing our coordinate system we used a very specific procedure for choosing the
directions of the axes, which only works for 3 dimensions. There is a broader, general
question to be asked about any vector space: What is the minimum number of vectors
required to "represent" all the others? This minimum number n is the dimensionality of a
vector space.
ˆ( )
ˆ( )
ˆ( )
y z z y
z x x z
x y y x
A B i A B A B
j A B A B
k A B A B
definition of the cross product

Vector Spaces in Physics 8/25/2015
1 - 18
Here is a more precise definition of dimensionality. Consider vectors 1E
, 2E
, . . . mE
.
These vectors are said to be linearly dependent if there exist constants (scalars) c1, c2, . . .
cm, not all zero, such that
0...2211
mm EcEcEc . (1-51)
If it is not possible to find such
constants ci, then the m vectors are
said to be linearly independent.
Now imagine searching among all
the vectors in the space to find the
largest group of linearly
independent vectors. The
dimensionality n of a vector space
is the largest number of linearly
independent vectors which can be found in the space.*
Example using geometrical vectors. Consider the three vectors shown in figure 1-
10. Which of the pairs BA
, , CA
, , and CB
, are linearly independent?
Solution: It is pretty clear that 0
CAa , for some value of a about equal to 2;
so A
and C
are not linearly independent. But A
and B
do not add up to zero no matter
what scale factors are used. To see this more clearly, suppose that there exist a and b
such that 0
BbAa ; then one can solve for B
, giving Ab
aB
. This means that
A
and B
are in the same direction, and this is clearly not so, showing by contradiction
that A
and B
are not linearly dependent. A similar line of reasoning applies to B
and
C
. Conclusion: BA
, and CB
, are the possible choices of two linearly independent
vectors.
Example using coordinates. Consider the three vectors
1 2 3
2 4 3
1 , 3 , 2 .
1 3 1
E E E
(1-52)
Are they linearly independent?
Solution: Try to find c1, c2, and c3 such that
* This may sound a bit vague. Suppose you look high and low and you can only find at most two linearly
independent displacement vectors. Are you sure that the dimensionality of your space is two? What if you
just haven't found the vectors representing the third dimension (or the fourth dimension!) This is the
subject of the short film Flatland.
x
y
A C
B
Figure 1-10. Three vectors in a plane.

Vector Spaces in Physics 8/25/2015
1 - 19
0332211
EcEcEc . (1-53)
This means that the sums of x-components, y-components and z-components must
separately add up to zero, giving three equations:
component-z 03
component-y 023
component x0342
321
321
321
ccc
ccc
ccc
.
Now we solve for c1, c2, and c3. Subtracting the third equation from the second gives c3
=0. The first and second equations then become
03
042
21
21
cc
cc.
The first equation gives c1 = -2c2, and the second equation gives c1 = -3c2. The only
consistent solution is c1 = c2 = c3 = 0. These three vectors are linearly independent!
This second example is a little messier and less satisfying than the previous example, and
it is clear that in 4, 5 or more dimensions the process would be difficult. In chapter 2 we
will discuss more elegant and powerful methods for solving simultaneous linear
equations.
Solving simultaneous linear equations with Mathematica. It is hard to resist
asking Mathematica to do this problem. Here is how you do it:
Solve[{2c1+4c2+3c3==0,c1+3c2+2c3==0,c1+3c2+c3==0},{c2,c3}] {}
This is Mathematica’s way of telling us that there is no solution.
What if we try to make 1E
, 2E
, and 3E
linearly dependent? If we change 2E
to
4
3
1
,
then the sum of 1E
and 2E
is twice 3E
, so the linear dependence relation
02 321
EEE
should be satisfied; this corresponds to c2 = c1, c3 = -2c1. Let’s ask Mathematica:
Solve[{2c1+4c2+3c3==0,c1+3c2+2c3==0,c1+c2+c3==0},{c2,c3}] {{c2->c1,c3->-2 c1}}
Sure enough!!
Is this cheating? I don't think so!

Vector Spaces in Physics 8/25/2015
1 - 20
J. Components in a Rotated Coordinate System. In physics there are lots of reasons
for changing from one coordinate system to another. Usually we try to work only with
coordinate systems defined by orthonormal unit vectors. Even so, the coordinates of a
vector fixed in space are different from one such coordinate system to another. As an
example, consider the vector A
shown in figure 1-11.
It has components Ax and Ay, relative to the x and y axes. But, relative to the x' and y'
axes, it has different components Ax' and Ay'. You can perhaps see from the complicated
construction in figure 2-3 that
Ax'=Ax cos + Ay sin (1-54)
And a similar construction leads to
Ay'=-Ax sin + Ay cos (1-55)
There is another, easier (algebraic rather than geometrical) way to obtain this result:
'ˆˆ'ˆˆ
'ˆ)ˆˆ(
'ˆ'
ijAiiA
iAjAi
iAA
yx
yx
x
,
'ˆˆ'ˆˆ
'ˆ)ˆˆ(
'ˆ'
jjAjiA
jAjAi
jAA
yx
yx
y
,
We can evaluate the dot products between unit vectors
with the aid of figure 1-12, with the result
x
y
A
Ax
x'
y'
Ay
Ax'
Ax cos
Ay sin
Figure 1-11. Coordinates of a vector A
in two different coordinate systems.
i
i'
jj'
Figure 1-12. Unit vectors for
unrotated (i and j) and rotated
(i' and j') coordinate systems.

Vector Spaces in Physics 8/25/2015
1 - 21
cos'ˆˆ
,sin)2
cos('ˆˆ
sin)2
cos('ˆˆ
,cos'ˆˆ
jj
ij
ji
ii
, (1-57)
This gives for the transformation from unprimed to primed coordinates
cossin'
sincos'
yxy
yxx
AAA
AAA
, (1-58)
It is easy to generalize this procedure to three or more dimensions. However, we will
wait to do this until we have introduced some more powerful notation, in the next
chapter.
K. Other Vector Quantities
You may wonder, "What happened to all the other vectors in physics, like velocity,
acceleration, force, . . . ?" They can ALL be derived from the displacement vector, by
taking derivatives or by using a law such as Newton's 2nd law. For example, the average
velocity of a migrating duck which flies from point 1 to point 2 in time t is equal to
)(1
1212 rrt
v
(1-40)
The quantity )( 12 rr
, is the sum of two vectors (the vector 1r
and the vector 2r
, which
is the negative of the vector 2r
), and so )( 12 rr
is itself a vector. It is multiplied by a
scalar, the quantity t
1. And the product of a vector and a scalar is a vector. So, average
velocities are vector quantities. Instantaneous velocities are obtained by taking the limit
as 0t , and the same argument still applies. You should be able to reconstruct the
line of reasoning showing that the acceleration is a vector quantity.
PROBLEMS
NOTE: In working homework problems, please: (a) make a diagram with every
problem. (b) Explain what you are doing; calculation is not enough. (c) Short is good,
but not always.
Problem 1-1. Consider the 5 quantities below as possible vector quantities:
1. Compass bearing to go to San Jose.
2. Cycles of Mac G4 clock signal in one second.

Vector Spaces in Physics 8/25/2015
1 - 22
3. Depth of the water above a point on the bottom of San Francisco Bay, say
somewhere under the Golden Gate Bridge.
4. Speed of wind, compass direction it comes from.
5. Distance and direction to the student union.
Explain why each of these is or is not a vector. (Be careful with number 3. Do you need
to use g , a vector in the direction of the gravitational field near the Golden Gate Bridge,
to define the water depth?)
Problem 1-2. [Mathematica] Consider two displacements: )0,5( feetA
,
)90,5( feetB
(The angle is measured from due East, the usual x axis.)
(a) Make a drawing, roughly to scale, showing the vector addition BAC
.
Then, using standard plane geometry and trigonometry as necessary, calculate C
(magnitude and angle).
(b) Appendix C gives a Mathematica function, Vsum, for adding two vectors. Use
Vsum to add the two given vectors. (Note that the function can be downloaded from the
Ph 385 website.)
Attach a printout showing this operation and the result. Include a brief account of what
you did and an interpretation of the results
Problem 1-3. [Mathematica] Consider the following vectors:
)90,1( A
,
)45,2( B
,
)180,1( C
.
Use the Mathematica function Vsum given in Appendix C to verify that, for these three
vectors, the associative law of vector addition, CBACBA
, is satisfied.
[This is, of course, not a general proof of the associative property.]
Attach a printout showing this operation and the result. Include a brief account of what
you did and an interpretation of the
results.
Problem 1-4. Consider adding two
vectors A
and B
in two different
ways, as shown in the diagram. These
vector-addition triangles correspond to
the vector-addition equations
1
2
C A B
C B A
.
Show using geometrical arguments (no components!) that 1 2C C .
A
B
1C
A
B
2C

Vector Spaces in Physics 8/25/2015
1 - 23
New Problem 1-4. The object of this problem is to show, by geometrical construction,
that vector addition satisfies the commutativity relation,
(to be demonstrated)A B B A
Start with the two vectors shown to the right. Draw
the vector-summation diagram forming the following
sum:
A B A B
This should form a closed figure, adding up to 0 .
(a) Explain why this figure is a parallelogram.
(b) Use this parallelogram to illustrate that
A B B A .
(You can use the definition of the negative of a vector as being the vector, drawn in the
opposite direction.)
Problem 1-5. Suppose that a quadrilateral is formed by adding four vectors A
, B
, C
,
and D
, lying in a plane, such that the end of D
just reaches the beginning of A
. That is
to say, the four vectors add up to zero: 0
DCBA .
Using vector algebra (not plane geometry), prove that the figure formed by joining the
center points of A
, B
, C
, and D
is a parallelogram. [It is sufficient to show that the
vector from the center of A
to the center of B
is equal to the vector from the center of
D
to the center of C
, and similarly for the other two parallel sides.] Note: A
, B
, and
C
are arbitrary vectors. Do not assume that the quadrilateral itself is a square or a
parallelogram.
Problem 1-6. Consider the "vector-subtraction
parallelogram'' shown here, representing the vector
equation
( ) ( ) 0A B A B .
(a) Draw the "vector-subtraction parallelogram,''
and on it draw the two vectors BAD
1 and
2D B A ; they should lie along the diagonals of
the quadrilateral.
(b) The two diagonals are alleged to bisect each
other. Using vector algebra, show this by showing
that displacing halfway along 1D leads to the same point in the plane as moving along
one side and displacing halfway along 2D . HINT: you can show that amounts to
proving that 1 2/ 2 / 2D B D .
Problem 1-7. Explain why acceleration is a vector quantity. You may assume that
velocity is a vector quantity and that time is a scalar. Be as rigorous as you can.
B
B
A A
The vector-subtraction parallelogram
A
B

Vector Spaces in Physics 8/25/2015
1 - 24
Problem 1-8. Using Hooke's law, and assuming that displacements are vectors, explain
why force should be considered as a vector quantity. Be as rigorous as you can.
Problem 1-9. Can you devise an argument to show that the electric field is a vector?
The magnetic field?
Problem 1-10. Consider a set of vectors defined as objects with magnitude (the
magnitude must be non-negative) and a single angle to give the direction (we are in a
two-dimensional space). Let us imagine defining vector addition as follows:
max( , ),2
A BA B A B
.
That is, the magnitude of the sum is equal to the greater of the magnitudes of the two
vectors being added, and the angle is equal to the average of their angles. We keep the
usual definition of multiplication of a vector by a scalar, as described in the text. (Note:
The symbol indicates an alternate definition of vector addition, and is not the same as
the usual vector addition in the geometrical representation.)
In order to see if this set of vectors constitutes a vector space,
(a) Try to define the zero vector.
(b) Try to define the negative of a vector.
(c) Test to see which of the properties (1-29) through (1-33) of a vector space can be
satisfied.
New Problem 1-10. Consider a set of vectors defined as objects with magnitude (the
magnitude must be non-negative) and a single angle to give the direction (we are in a
two-dimensional space). Let us imagine defining vector addition as follows:
, A BA B A B .
That is, the magnitude of the sum is equal to the absolute value of the difference in
magnitude of the two vectors being added, and the angle is equal to the difference of their
angles. We keep the usual definition of multiplication of a vector by a scalar, as described
in the text. (Note: The symbol indicates an alternate definition of vector addition,
and is not the same as the usual vector addition in the geometrical representation.)
In order to see if this set of vectors constitutes a vector space,
(a) Try to define the zero vector.
(b) Try to define the negative of a vector.
(c) Test to see which of the properties (1-29) through (1-33) of a vector space can be
satisfied.
Problem 1-10a. Consider a set of vectors defined as objects with three scalar
components;
x
y
z
A
A A
A
.

Vector Spaces in Physics 8/25/2015
1 - 25
Let us imagine defining vector addition as follows:
x x
y z
z y
A B
A B A B
A B
.
We keep the usual definition of multiplication of a vector by a scalar, as described in the
text. (Note: The symbol indicates an alternate definition of vector addition, and is
not the same as the usual vector addition in the component representation.)
In order to see if this set of vectors constitutes a vector space,
(a) Try to define the zero vector.
(b) Try to define the negative of a vector.
(c) Test to see which of the properties (1-29) through (1-33) of a vector space can be
satisfied.
Problem 1-11. Vector addition, in the generalized sense discussed in this chapter, is a
process which turns any two given vectors into a third vector which is defined to be their
sum. Consider the space of 3-component vectors. Suppose someone suggests that the
cross product could actually be thought of as vector addition, since from any two given
vectors it produces a third vector. What is the most serious objection that you can think of
to this idea, based on the general properties of a vector space given in the chapter?
Problem 1-12. The Lorentz force on a charged particle is given by equation (1-14) in the
text. Let us consider only the second term, representing the force on a particle of charge
q, moving with velocity v in a magnetic field B :
F qv B .
The power produced by the operation of such a force, moving with velocity v , is given
by P F v .
Using these definitions, show that the Lorentz force on a moving charged particle does
no work.
Problem 1-13. Let us consider two vectors A
and B
, members of an abstract metric
space. These vectors can be said to be perpendicular if 0A B . Using the basic
properties of the vector space (Table 1-1) and of the inner product (Table 1-2), prove that,
if 0A B , then A
and B
are linearly independent; that is, that if you write
021
BcAc ,
prove using the inner product that c1=0 and c2=0. (It is assumed that neither A
nor B
is
equal to 0
.) This is a general proof that does not depend on geometrical properties of
vectors in space. Hint: Start with 1 2 0A c A c B .
Problem 1-14. One of the important properties of a rotation is that the length of a vector
is supposed to be invariant under rotation. Use the expressions (1-54) and (1-55) for the

Vector Spaces in Physics 8/25/2015
1 - 26
coordinates of vector A
in a rotated coordinate system to compare the length of A
before and after the rotation of the coordinate system. [Use AAA
2 to determine the
length of A
.]
Problem 1-15. Calculate the following dot products: BA
, CA
, and CAB
2 .
Problem 1-16. Which vector (among A
, B
, and C
) is the longest? Which is the
shortest?
Problem 1-17. Calculate the vector product CBA
.
Problem 1-18. Find a unit vector parallel to C
.
Problem 1-19. Find the component of B
in the direction perpendicular to the plane
containing A
and C
. (Hint: the component of a vector in a particular direction can be
found by taking the dot product of the vector with a unit vector in that direction.)
Problem 1-20. Find the angle between A
and B
.
Problem 1-21. Use Mathematica to determine whether or not A
, B
, and C
(the three
vectors given above) are linearly independent. That is, ask Mathematica to find values of
c1, c2, and c3 such that 0321
CcBcAc . (See section I of this chapter, using the
"solve" function.) Your results should be briefly annotated in such a way as to explain
what you did and to interpret the results.
Problem 1-22. Use the definition of vector addition in terms of components to prove the
associative property of vector addition, equation (1-30).
Problem 1-23. Find 2 A
, 3 B
, and 2 A
-3 B
, when
(a)
1
2
1
A
and
2
1
2
B
;
(b)
3
2
3
A
and
1
1
2
B
;
The following seven problems will all make reference to these three vectors:
4 0 7
4 , 5 , 1 .
4 5 1
A B C

Vector Spaces in Physics 8/25/2015
1 - 27
(c)
6
3
1
A
and
4
2
1
B
;
Prove that BA
32 is parallel to the (x,y)-plane in (b), and parallel to the z axis in (c).
Problem 1-24. Suppose that the vector 00 , yxD
points from the origin to the center
of a circle. (We are working in two dimensions in this problem.) The points on the circle
are defined to be those for which the distance from the center point is equal to the
constant R. Let the vector from the origin to a point on the circle be yxX ,
. Then the
vector from the circle's center to the point on the circle is given by
DXR
.
The condition that the point is on the circle can then be expressed in terms of the dot
product as follows:
2RRR
.
Show that this condition leads to the standard equation for a circle, in terms of x, y, x0, y0,
and R.
Problem 1-25. Consider the vector
22
1 2ˆ ˆˆ22
0
u i j
, lying in the x-y plane.
(a) Show that u is a unit vector.
(b) Find another unit vector v which is also in the x-y plane, and is orthogonal to u .
(c) Find a third unit vector w , such that u , v , and w are mutually orthogonal.
Problem 1-26. Show that the three direction cosines corresponding to a given vector
satisfy the relation
1coscoscos 222 .

Vector Spaces in Physics 8/25/2015
1 - 28
Problem 1-27. Use the dot product and coordinate notation to find the cosine of the
angle between the body diagonal A of the cube
shown and one side B of the cube.
Problem 1-28. Consider the following situation,
analogous to the expansion of the Universe. A swarm
of particles expands through all space, with the
velocity ( )v t of a given particle with position vector
( )r t relative to a fixed origin O given by
( ) ( )dr
v t f t rdt
,
with f(t) some universal function of time. This is the Hubble law.
Show that the same rule applies to positions ( )r t and velocities ( )v t measured relative
to any given particle, say particle A, with position ( )Ar t . That is, show that for
( ) Ar t r t r t and dr
vdt
,
( )v f t r .
This invariance with respect to position in the Universe is sometimes called the
cosmological principle. Can you explain why it implies that we are not at the "center of
the Universe?"
Problem 1-29. It is sometimes convenient to think of a vector B
as having components
parallel to and perpendicular to another vector A
; call these components B and B ,
respectively
(a) Show that
2| |A
ABAB
is parallel to A
and has magnitude equal to the component ˆB A of B
in the direction of
A
; that is, show that
||ˆ ˆB A B A
where as usual A is a unit vector in the direction of A
(and A is its magnitude).
(b) Consider an expression for the part of B
perpendicular to A
:
2A
ABABB
.
Show that
1. B B B
2. 0B A
A
B
a
z
a
y
a

Vector Spaces in Physics 8/25/2015
1 - 29
Problem 1-30. Consider a cube of side a, with one
corner at the origin and sides along the x, y, and z axes
as shown. Let the vector A
be the displacement from
the origin to the opposite side of the cube, as shown, and
let B
be the vector from the origin to the other corner of
the cube on the z axis, as shown.
Use the result of the previous problem to find the
component of B
perpendicular to A
. Express the result
in component form, in terms of a.
Problem 1-31. Consider the set of positive real numbers (zero not included). Of course
we know how to add and multiply such numbers. But let us think of them as vectors,
with a crazy definition for vector addition, represented by the symbol . Here is the
definition of this possible vector space.
Consider the set { , , ,... real numbers greater than zero}a b cV , with its elements
referred to as vectors, with vector addition defined in the following way:
a b ab ,
where ab represents the usual product of the two numbers.
Refer to Table 1.1, all of the properties of a vector space except those involving scalar
multiplication. Are properties 1, 3, and 4 satisfied? Are the associative and commutative
properties of vector addition, (1-29) and (1-30), satisfied? Explain.
Problem 1-32. Consider component vectors defined in the usual way, as in section E of
this chapter. However, hoping to elevate this vector space to metric-space status, we
define the inner product of two vectors A and B in the following way:
2 2 2 2 2 2
x y z x y zA B A A A B B B .
Consider the properties of the inner product listed in Table 1-2. Are they satisfied with
this definition of the inner product? Explain.
A
B
a y
x
a
z
a