Embed Size (px)
Citation preview

IIC-06-04
コーナーリングスティフネスと車両横すべり角の推定に基づく
電気自動車のヨーレート制御法に関する一考察
高橋直樹∗,藤本博志(横浜国立大学)
Consideration on Yaw Rate Control for Electric Vehicle Based on Cornering Stiffnessand Body Slip Angle Estimation
Naoki Takahashi∗, Hiroshi Fujimoto (Yokohama National University)
Abstract
In this paper, a novel yaw-rate control law is proposed for motion stability of electric vehicles. The proposed
method can estimate the yaw-moment which is generated by the cornering force in use of the body slip angle esti-
mation with the adaptive observer and the cornering stiffness identification. The proposed control method enhances
the vehicle stability by the direct yaw-moment control (DYC) using torque difference between left and right in-wheel
motors. The simulations and experiments show that the proposed yaw-rate control has better control performance
than our conventional method named yaw-moment observer (YMO).
キーワード:電気自動車,車両横すべり角,コーナーリングスティフネス,ヨーレート制御,直接ヨーモーメント制御(electric vehicle,body slip angle,cornering stiffness,yaw-rate control,direct yaw-moment control (DYC) )
1. はじめに電気自動車 (EV)の持つ最大の特長は,モータの持つ高
度な制御性である。高度な制御性とは,まずトルク応答が高速である (エンジンより2ケタ程度速い)こと。また,電流換算によって正確に発生トルクが把握可能であること。さらに,モータは小型化が可能であることから分散配置による各輪独立駆動が可能であることである (1)。これらの特徴を活かし,内燃機関自動車 (エンジン駆動)では実現不可能な高速制御が,EV(モータ駆動)では実現可能となった。その結果,より高度な車両の駆動 ·姿勢制御が要求され,車両の様々な信号を測定し制御する必要が生じてきた。そのような信号として一般的なのは,ヨーレート γ や,直接的な検出が難しいとされている車両横すべり角 β などがあげられる。 γ は車両重心軸まわりの回転角速度であり,ジャイロセンサで簡単に測定できる。これに対し β は車体の向いている方向と車両速度が生じる方向との角度を指し,その測定には高価な対地センサを必要とするため,推定によって求める必要がある (2)。 これまで筆者らは,前後輪独立のコーナーリングスティフネス推定 (3) と横加速度を用いたロバストなオブザーバ (4)
による β 推定法を提案してきた。本論文では,このオブザーバによって推定された車両横すべり角 β を用いた新たなヨーレート制御法を提案する。なお,実験車両は後輪にインホイールモータを2個持つ左右独立駆動が可能な小型EVである。
2. 車両運動のモデル化本章では,車両モデルについて述べる。車両モデルは,四
輪車両を車軸に関して左右対称として,前輪,後輪のそれ
x
y
l
lf
lr
V
f
r
COG
Fx_f
Fx_r
Fy_f
Fy_r
Yf
r
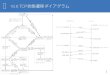
Fx_f, Fx_r: Longitudinal Force
Fy_f, Fy_r: Side Force
: Tire Side Slip Angle
: Body Slip Angle
: Yaw Rate
: Steering Angle
Y Y : Cornering Force
f r
図 1 二輪車両モデルFig. 1. Two wheel model
ぞれに発生する駆動力や横力を等価とみなす図 1に示した二輪車両モデルを用いた。この二輪車両モデルにおいて車体のローリングを無視し,速度を一定と仮定する。このモデルから導き出される車両運動方程式を変形すると,以下の状態方程式 (1)が求まる (5)。
x = A(„)x + B(„)u · · · · · · · · · · · · · · · · · · · · · · · (1)
A(„) =
[−2
Cf +Cr
MV−1 − 2
lf Cf−lrCr
MV 2
−2lf Cf−lrCr
I−2
l2f
Cf +l2rCr
IV
]
B(„) =
[2Cf
MV0
2lf Cf
I1I
]
1/6

x =
[β
γ
], u =
[δ
Nz
], „ =
[Cf
Cr
]
ただし,M :車両重量,V :車両速度,δ:舵角,Nz:左右の駆動力差による Z軸まわりの駆動力モーメント,Cf,Cr:前後輪のコーナーリングスティフネス(CS),lf , lr:車両重心から前 ·後輪軸までの距離,I:車両慣性である。
3. CSと ˛ の推定
h3 ´ 1iコーナーリングスティフネス (CS)の推定 車両重心点における,ヨー軸まわりのヨーイング運動方程式は,式 (1)より
Iγ = −2{
Cf
(β +
lfV
γ − δ)
lf − Cr
(β − lr
Vγ)
lr
}+ Nz(2)
と記述できる。これを変形し,さらに β の項を次節で述べるオブザーバから求めた βを代入した式(3)の両辺に LPF
F (s)をかける。そして,式(3)に忘却係数を用いた逐次形最小二乗法を用いて CSを推定する (3)。ただし,左辺は後に述べるヨーモーメントオブザーバ (YMO)の出力である。
y =[
Cf Cr
] [ξ1
ξ2
]· · · · · · · · · · · · · · · · · · · · · (3)
y = F (s)(Nz − Iγ), ξ1 = 2F (s)(β +
lfV
γ − δ)lf
ξ2 = −2F (s)(β − lr
Vγ)lr
h3 ´ 2i逐次形最小二乗法での条件付アップデート 前節で述べた CSの推定には,忘却係数 λを用いた逐次形最小二乗法を用い,次式に基づき推定を行う。
Γ(k) =1
λ
{Γ(k − 1) − Γ(k − 1)‰(k)‰T (k)Γ(k − 1)
λ + ‰T (k)Γ(k − 1)‰(k)
}(4)
„(k) = „(k − 1) − Γ(k − 1)‰(k)
λ + ‰T (k)Γ(k − 1)‰(k)·
{‰T (k)„(k − 1) − y(k)}· · · ·(5)
„ =[
Cf , Cr
]T
実験での CS推定では,リグレッサ ‰の PE性(Persistent
Excitation)に着目した条件付アップデートを用いて推定を行っている (6)。具体的には,現在のリグレッサ ‰(k)からmサンプル点前までのデータを用いて,式 (6)の行列M(i)
を構成する。
M(i) =1
m
i∑k=i−m
‰(k)‰(k)T · · · · · · · · · · · · · · · · · · · (6)
その時,式 (6)が正則であれば,PE性が満たされ,正確な推定が可能となる。具体的な条件付アップデートの内容は,M(i)の最小固有値 (minimum eigenvalue:ME)がある基準値 εを超えた時のみ „ の推定を行う。
h3 ´ 3i車両すべり角 ˛の推定法 車両すべり角 βの推
P
CSID
Nz
observer
^
Cf Cr^ ^
Cfn Crn
P: Plant
CSID: Cornering Stiffness Identification
図 2 固定オブザーバFig. 2. Fixed observer
定は,測定可能な信号 V,γ,δなどを用いて,プラントをモデリングしオブザーバを構成して推定するのが一般的である。オブザーバの状態方程式中のコーナーリングスティフネス (CS)の値は従来はノミナル値 „n=[Cfn,Crn]が用いられている。この一般的な β オブザーバの式を式 (7)に示す。 また,今回のシミュレーションと実験で提案法の比較対照に用いるシステムとして,一般的なオブザーバに 〈3 · 1〉節で述べた,CS の推定ブロックを組み合わした固定オブザーバ (Fixed Observer)を用いる。このブロック図を図 2
に示す。
˙x = A(„n)x + B(„n)u + k(y − y) · · · · · · · · · · · · (7)
y = γ, y = cγx, cγ = [0, 1]
しかし,一般的な線形 β オブザーバは路面状態の変動に対するモデル化誤差が過大であるので,それを解消する方法として,筆者らは文献 (3)で CSの推定値を用いる推定法(CEO: Cornering stiffness Estimation Observer)を提案した。このオブザーバは以下の式 (8)に示すように,前後輪の CSの推定値 „=[Cf,Cr]を用いることによりオブザーバを構成する。
˙x = A(„)x + B(„)u + k(y − y) · · · · · · · · · · · · · · · (8)
y = γ, y = cγx
しかし,CEOでは車両のステア特性がニュートラルステアになる時,すなわち式 (9)が成り立つ時に,CEOは不可観測になるという問題を含んでいた (4)。
lfCf − lrCr = 0 · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · (9)
また,他にモデル化誤差を小さくする方法として,横加速度 ayを用いる推定法 (LAO:Lateral Acceleration Observer)
が文献 (7) (8)で提案されている。ay = V (β + γ)より,これをオブザーバの出力に取り込むと式 (10)(11)となる。LAO
では,CS の値をノミナル値を用いている。また前後輪のCSの値を等価とみなして,„n=[Cfn,Crn]=[Cn,Cn]としている。この時オブザーバゲインKにも „nを用いている。
2/6

P
CSID
Nz
observer
^Cf Cr^ ^
Cf Cr^ ^
P: Plant
CSID: Cornering Stiffness Identification
ay
図 3 適応オブザーバFig. 3. Adaptive observer
˙x = A(„n)x + B(„n)u + K(„n)(y − y) · · · · · (10)
y = C(„n)x + D(„n)u · · · · · · · · · · · · · · · · · · · · · · (11)
C(„) =
[0 1
V a11 V (a12 + 1)
],
D(„) =
[0 0
V b11 0
], y =
[γ
ay
]
K(„) =
[λ1λ2(lf Cf−lrCr)I
2Cf Cr(lf +lr)2− 1 1
V
−λ1 − λ2M(lf
2Cf +lr2Cr)
I(lf Cf−lrCr)
]
ただし,a11~a22,b11~b22 は式 (1)の行列A(„),B(„)の各成分をとし,λ1,λ2 は設計者が任意配置できるオブザーバの極である。 そこで,不可観測性の問題を解決し,よりロバストなオブザーバを構成するため,CEOと LAOの2つのオブザーバを融合させ,前後輪独立の CSの推定値 „と横加速度 ay
を用い,文献 (7) (8) で提案されている式 (10)のオブザーバゲインKにおいて „を用いて路面状況や舵角に応じてリアルタイムでゲインを変化させる適応オブザーバ (Adaptive
Observer)を考案した (4)。このオブザーバの状態方程式は式 (12),(13)と表せ,このブロック図を図 3に示す。
˙x = A(„)x + B(„)u + K(„)(y − y) · · · · · · · · · (12)
y = C(„)x + D(„)u · · · · · · · · · · · · · · · · · · · · · · · · (13)
4. ヨーレート制御
h4 ´ 1iヨーモーメントオブザーバ (YMO) 車両重心点における,ヨー軸まわりのヨーイング運動方程式 (2)において,右辺第一項に表されるタイヤに発生するコーナーリングフォースによるヨーモーメントを Nt とすると,式(2)は,
Iγ = Nt + Nz · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · (14)
と定式化できる。また,この時 Nz と γ の信号を用いて,図 4 のようにヨーモーメントオブザーバを構成すれば (9),実際にタイヤに発生しているヨーモーメント Nt を推定することができる。またヨーレートコントローラを PI 制御
PIIs
In s
s+wc
*
Nz
Nt^
wc
+
- -
+
+ -
s+1
Kf
f
Nin
図 4 ヨーモーメントオブザーバFig. 4. Yaw moment observer
P
CSID
Nz
observer
^
Cf Cr^ ^
P: Plant
CSID: Cornering Stiffness Identification
NTE: Nt Estimation
ay
PI
N^
NTE
s+1
Kf
f
Nin+
+- -
図 5 提案手法制御ブロック図Fig. 5. Block of proposed method
で設計すると,この制御系ブロック図は図 4となる。ただし,ωcはヨーモーメントオブザーバのカットオフ周波数である。
h4 ´2i提案手法 本節では提案手法に関して説明する。提案手法では,式 (2)においてタイヤに発生するヨーモーメント Nt を,推定されたコーナーリングスティフネス Cf
,Cr と車両横すべり角 βから直接的に計算して,式 (14)のNt を以下の式 (15)のように推定し Nz により補償する。
Nt = −2{
Cf
(β +
lfV
γ − δ)
lf − Cr
(β − lr
Vγ)
lr
}(15)
また,この提案手法のブロック図を図 5に示す。5. シミュレーションによる検証h5 ´ 1iヨーレート制御のシミュレーション 次に,図
4に示す YMOによる制御ブロック図と,図 5に示す提案法のヨーレート制御ブロック図に関して,ヨーレート制御のシミュレーションを行う。 シミュレーション条件は,時速 V =20[km/h]で走行中,図6に示すような舵角 δを切ったときに,左右のモータートルク差によるヨーレートNzによって,車両重心点のヨーレート γを指令値 γ∗に追従させるシミュレーションである。但し,図 6の舵角 δは比較のため,第 6節の実験と同じデータを用いている。指令値 γ∗は舵角 δに図 4,図 5に示すようなフィードフォワードとして 1次元遅れ系のモデルに追従するように生成した。γ∗は,時定数 τf とゲインKf によって調節可能であるが,今回は V =20[km/h]において乾燥路面での実験より観測されたデータをもとに,τf=0.05[sec],Kf=4[sec−1]と設定した (10)。なお,CSのノミナル値と推
3/6

0 1 2 3 4-0.1
-0.05
0
0.05
0.1
0.15
time [sec]
Steering angle [rad]
delta
図 6 実験データの舵角 δ
Fig. 6. Experimental data of δ(t)
0 1 2 3 4
-0.4
-0.2
0
0.2
0.4
0.6
time [sec]yaw rate [rad/sec]
gamma-refproposed methodYMO
0 1 2 3 4-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
time [sec]
yaw rate [rad/sec]
gamma-refgamma-Fixed obs.
1.4 1.6 1.8 2 2.2 2.4
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
0.55
time [sec]
Yaw rate [rad/sec]
gamma-refproposed methodYMO
(a) Proposed method and YMO (b) Fixed obs. (c) Zoom of Fig.7.(a)
図 7 ヨーレート制御のシミュレーション結果(ヨーレート γ と推定値 γ)
Fig. 7. Simulation result of yaw-rate control (γ and γ)
定値の初期値は乾燥路面を想定し,Cfn = Cf (0) = 8000,Crn = Cr(0) = 8000,としモデル化誤差を持たせるため真値は雪面想定して Cf = 4700, Cr = 3800とした。 また,図 4,図 5の YMOと提案法の PI制御器は,制御入力Ninから出力 γまでの伝達関数を 1
Insとして,極配置
によって設計された同じ制御器である。その極は-5[rad/sec]
の重根として設計した。同じ制御器を用いた時に,以下に示す3つの制御方法でシミュレーション結果を比較した。ただし,以下の (2)の制御シミュレーションと実験において,先に述べたように固定オブザーバでは路面状況の変化に対するモデル化誤差の影響が過大であるため,Cf , Cr が正確に求められない。よって,式 (15)の Cf , Cr はノミナル値 Cfn, Crn を用いている。( 1) YMOのみによる制御( 2) 固定オブザーバで推定された β を用いて Nt を補
償したヨーレート制御 (図 5のオブザーバが固定オブザーバの場合)
( 3) 提案手法:適応オブザーバで推定された βと Cf , Cr
を用いて Ntを補償したヨーレート制御 (図 5のオブザーバが適応オブザーバの場合)
以上,3つの方法でのヨーレート指令値 γ∗ に対する追従特性のシミュレーションを行った。その結果を順に図 7(a),図 7(b)に示す。 図 7(a)において,YMOでは指令値 γ∗ に対し γ は完全には追従せず,多少位相がずれる結果となった。しかし,提案法では舵角を切り始めてすぐに,CS の推定が行われるため,CSに関するモデル化誤差が極めて小さくなる。従って,Nt が正確に補償され,ヨーレート γ が指令値 γ∗ に即収束している結果となった。 図 7(b)では,固定オブザーバは CSのノミナル値を用いているために,CSに関するモデル化誤差の影響で β が誤差を大きく持つ。そのために Nt が補償できず,指令値 γ∗
に対し追従するどころか発散してしまう結果となった。 以上の結果より,提案法のヨーレート制御における優位性が示される。
h5 ´2i推定補償項 Ntの検証シミュレーション シミュレーション条件は,Nz=0.0 とする以外は前節と同じ条件
0 1 2 3 4-0.05
-0.04
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
time [sec]
Body slip angle [rad]
betaAdaptive obs.Fixed obs.
0 1 2 3 4-400
-300
-200
-100
0
100
200
300
400
time [sec]
Nt [Nm]
NtAdaptive obs.YMO
(a) Estimation result of β (b) Nt and Nt
by Adaptive obs. and Fixed obs. by Adaptive obs. and YMO
0 1 2 3 4
-800
-600
-400
-200
0
200
400
600
800
time [sec]
Nt [Nm]
NtFixed obs.
0 1 2 3 43000
4000
5000
6000
7000
8000
9000
time [sec]
Cornering Stiffness [N/rad]
Cf-trueCr-trueCf-hatCr-hat
(c) Nt and Nt (d) CS estimation result
by Fixed obs. by Adaptive obs.
図 8 推定補償項 Nt の検証シミュレーション結果Fig. 8. Simulation result of Nt estimation
で行う。乾燥路面で,時速 V =20[km/h]で走行中,図 6に示すような実験データの舵角 δ を切った時を想定する。 本節では,YMO,Fixed obs. ,提案法の3つの方法で,車両重心点に発生しているヨーレートNtの推定補償精度を検証するシミュレーションを行った。そのときの,車両横すべり角の真値 β(t)と適応オブザーバと固定オブザーバそれぞれが推定した β(t)の波形を図 8(a)に示す。また,Nt(t)
の真値と適応オブザーバと YMOそれぞれによる Nt(t)の波形を図 8(b)に,固定オブザーバによる Nt(t)を図 8(c)に示す。また図 8(d)は適応オブザーバによるCSの推定値 Cf
,Crの波形と,このシミュレーションでのCSの真値Cf , Cr
とである。 図 8(a)において,適応オブザーバの車両横すべり角推定値 β は 0.5秒前後で,β に対して誤差なく推定できていることがわかる。一方,固定オブザーバは β を全く推定できない結果となった。
4/6

Battery
12V 6
L
motor
R
motor
L
inverter
R
inverter
L
controller
R
controller
accelerationand
yaw-ratesensor
steering angle
sensor
a ,a ,x y
L R
note
PC
Program
logging
data
図 9 実験車両システム構成図Fig. 9. Configuration of experimental system
図 8(b)において,YMOではNtと Ntの波形の振幅がほぼ等しく,かなりの精度で補償できている結果となった。しかし,Nt に対し Nt が若干,位相遅れが遅れる結果となった。これは YMO では LPF の時定数だけ推定が遅れるためである。一方,提案法では Nt と Nt が 0.5秒前後で完全に追従している結果となった。 図 8(c)では,Ntと Ntの振幅が大きくずれる結果となった。この図から固定オブザーバを用いると補償が正確に行えないことがわかる。 図 8(d)では,適応オブザーバを用いた提案法での CS推定値 Cf , Cr とその時の真値 Cf , Cr の結果である。CS推定値が 0.5秒前後で真値にかなり近づき,1秒前後で完全に真値に一致している。 以上の結果から,提案法では 0.5秒辺りで CSに関するモデル化誤差がなくなり正確な β 推定が完了したことが分かる。それ以降は,Nt と Nt がきれいに重なり,Nt が正確に補償できていることがわかる。一方,固定オブザーバでは CSに関するモデル化誤差の影響から β 推定が正確に行えないために,Ntを正確に推定補償することが不可能となった。以上の結果より,提案法のヨーレート制御における優位性が示される。
6. 実 験
h6 ´ 1i実機仕様 当研究室の実験車両は,シャーシはアラコ株式会社製“ COMS”を用いた,(株)チョロQモータース製の一人乗り EV“Qi(キューノ)”を改造した車両である。またモータコントローラとして,(株)マイウェイ技研にインバータユニットを発注し,協力して製作したものを用いている。このモータコントローラの最大の特徴は制御ボードにメモリを搭載しているため,実験データ取得のために PCなどを搭載する必要がないことである。また,モータにはホールセンサが付いており,位置角は線形補完することによりベクトル制御を行っている。この時のサンプリング周期は 10[kHz]とする。このシステムの概要を図9に示す。
h6 ´ 2i 実験結果 〈6 · 1〉 に示した実験車両で,時速
20[km/h] で走行中に図 6 のような正弦波状の舵角を与えた。この時の測定データは,モータのホールセンサ信号から車両速度 V(スリップは微小と仮定),横加速度 ay,ヨーレート γ,舵角 δ である。 本節では,〈5 · 2〉で示した,YMO,Fixed obs. ,提案法が補償する Nt の精度を検証する実験をオフラインで行った。取得した時系列データから,〈5 ·2〉節と同条件で,3つの方法で求めたヨーレート補償項 Nt の波形を,提案法とYMOは図 10(a)に,固定オブザーバの結果は図 10(b)に示した。また,図 10(c)は 〈5 · 2〉節のシミュレーションでのβ の波形と β 推定の実験結果である。図 10(d)はヨーレートセンサからの出力 γ と推定値 γ の結果である。図 10(e)
は,適応オブザーバでの CS の推定結果,図 10(f) は固定オブザーバでの CS推定結果である。 図 10(a) の実験結果において,YMO での Nt は図 8(b)
のシミュレーション結果とかなり近い結果が得られた。若干発生しているノイズは γ の演算に用いている擬似微分の影響である。また,提案法でもやはり,2.0秒前後から振幅的に YMOよりやや小さく,かつ位相は YMOより進んでいる図 8(b)と同様の結果が得られた。 図 10(b)の実験結果においても,図 8(c)のシミュレーション結果と同様の振幅と位相の Nt が得られた。これは固定オブザーバが CSに関して常にモデル化誤差を持ち,車両横すべり角 β の推定が不可能であるために Nt も推定できていない。 図 10(c)では,βが直接検出不可能であるためシミュレーション結果と比較した。〈5 ·2〉のシミュレーションの車両横すべり角 βと適応オブザーバの推定値 βの波形が若干の誤差はあるが,近似していることが分かる。しかし,固定オブザーバでは β の推定誤差は極めて大きいことが分かる。 図 10(d)では,適応オブザーバのヨーレート推定値 γ と測定された γ を比較することにより,提案する推定補償の検証を行っている。適応オブザーバのヨーレート推定値 γ
は γ に追従しているが,固定オブザーバでは,誤差を持つ結果となった。 図 10(e), 図 10(f)を比較すると CSの推定において適応オブザーバは,〈3 · 2〉で説明した PE性を満たす回数が多く,その結果 CSの推定値が多くアップデートしていることがわかる。 以上の結果と,シミュレーション結果との照合により,本提案法では Nt の補償が正確に行うことができ,ヨーレート制御における本提案法の優位性が示された。
7. 結 論著者らは,これまでに提案してきた前後輪独立のコーナーリングスティフネス推定法と車両横すべり角推定法を活かしたヨーレート制御法を提案した。 さらに,本提案法がヨーレート制御において著者らが以前に提案したコントローラである YMOよりも高速に応答し,路面状況の変動に対しロバストな制御が可能であることが,シミュレーションと実験結果から示された。
5/6

2 3 4-800
-600
-400
-200
0
200
400
600
800
time [sec]
Nt-hat [kg rad m2/sec
2]
Nt-hat
0 1 0 1 2 3 4-0.06
-0.04
-0.02
0
0.02
0.04
0.06
time [sec]
Body slip angle [rad]
beta-simAdaptive obs.Fixed obs.
(a) Estimation result of Nt (b) Estimation result of Nt (c) Estimation result of β
by Adaptive obs. and YMO by Fixed obs. by Adaptive obs. and Fixed obs.
2 3 4-0.6
-0.4
-0.2
0
0.2
0.4
0.6
Yaw rate [rad/sec]
gammaAdaptive obs.Fixed obs.
time [sec]0 1 2 3 4
3000
4000
5000
6000
7000
8000
9000
time [sec]
Cornering Stiffness [N/rad]
Cf-hatCr-hat
0 1 2 3 41000
2000
3000
4000
5000
6000
7000
8000
9000
time [sec]
Cornering Stiffness [N/rad]
Cf-hatCr-hat
0 1
(d) γ and γ (e) CS estimation result: Adaptive obs. (f) CS estimation result: Fixed obs.
by Adaptive and Fixed obs.
図 10 推定補償項 Nt の推定実験結果Fig. 10. Experimental result of Nt estimation
今後の予定としては,左右のモータトルク差によるヨーモーメントであるNzを制御入力に用いた車両安定化制御の実験結果を出すとともに,推定された車両すべり角とCSを用いて,EPS(Electric Power Steering)による AFS(Active
Front Safty)を行う。また,非線形領域での CS推定値の信頼性の検証を行っていく予定である。謝 辞最後に,本研究の一部はカシオ科学振興財団の研究助成
によって行われたことを付記する。参考文献(1) Yoichi Hori:“Future Vehicle Driven by Electricity and
Control-Reaerch on Four-Wheel-Motored: UOT Elec-
tric March II”, IEEE Trans. IE, Vol.51, No.5, (2004–10)
(2) U.Kiencke and A. DaiB:“Observation of Lateral Ve-
hicle Dynamics”, Control Eng. Practice, Vol.5, No.8,
pp.1145–1150, 1997
(3) N. Takahashi,H. Fujimoto, A. Tsumasaka, T.
Noguchi:“Proposal of Body Slip Angle Estimation for
Electric Vehicle Based on Identification of Front and
Rear Cornering Stiffness Coefficients”, Proc. IEE of
Japan, Technical Meeting Record, IIC–05–73,pp.89–
94(2005-3)(in Japanese)
(4) N. Takahashi,H. Fujimoto, T. Noguchi: “ Body Slip
Angle Estimation for Electric Vehicle Based on Identi-
fication of Cornering Stiffness Coefficients and Lateral
Acceleration”, JIASC–05–2–53,(2005-8)(in Japanese)
(5) 安部正人:「自動車の運動と制御」(2003)
(6) H. Fujimoto, B.Yao: “Multirate Adaptive Robust
Control for Discrete-Time Non-Minimum Phase Sys-
tems and Application to Linear Motors”, IEEE/ASME
Trans. Mechatronics, vol. 10, no. 4, pp.371–377, Aug.
2005.
(7) T. Inoue, Y. Hori:“Consideration on Linear Observers
to Estimate Vehicle Body Slip Angle β”, Trans. SICE
pp.29–31(2002–5)(in Japanese)
(8) Y. Aoki, T. Uchida, Y. Hori: ”Control of Body slip
Angle by Difference of Driving Force at Four Wheels”,IIC–05–71, (2005–3)(in Japanese)
(9) T. Saito, H. Fujimoto, T. Noguchi: “ Traction and
Steering Stabilization Control for Electric Vehicle
Based on Slip and Yaw-Moment Observers”, Proc.
IEE of Japan, Technical Meeting Record, IIC–03–52,pp.41–46(2003-3)(in Japanese)
(10) A. Tsumasaka, H. Fujimoto, T. Noguchi:“ Running
Stabilization Control Electric Vehicle Based on Cor-
nering Stiffness Estimation at Low-µ Terrain”, Proc.
IEE of Japan, Technical Meeting Record, IIC–05–71,pp.83–88(2005-3)(in Japanese)
6/6

![正準変換 - Kobe University...17 dpos [1] = ( 2 q03 p02 + 1/q02 ) dt ; 18 g これを実行すると・・・計算が破綻する!式(11.3)の右辺第2 項の分母のq がゼ](https://img.pdfslide.us/doc/110x75/602ca0694757134e771574b7/-kobe-17-dpos-1-2-q03-p02-1q02-dt-18-g-oeeoefffecoecci113ec2.jpg)