Embed Size (px)
DESCRIPTION
TRAIL/TNO Project 16. Fault detection and recovery in multi-modal transportation networks with autonomous mobile actors. Jonne Zutt [email protected] Delft University of Technology Information Technology and Systems Collective Agent Based Systems Group. Supervisors Dr. C. Witteveen - PowerPoint PPT Presentation
Citation preview

www.rsTRAIL.nl
Fault detection and recovery in multi-modaltransportation networks with autonomous mobile actors
TRAIL/TNO Project 16
Supervisors
Dr. C. Witteveen
Dr. ir. Z. Papp
Dr. ir. A.J.C. van Gemund
Jonne Zutt
Delft University of Technology
Information Technology and Systems
Collective Agent Based Systems Group
www.rsTRAIL.nl
Content
1. Project Characteristics
2. Problem setting:Transport Planning Problem
3. Scheduling Example
4. Preliminary Results
5. Future plans

www.rsTRAIL.nl
Project Characteristics
“Fault detection and recovery in multi-modal transportation networks with autonomous mobile actors”
• Planning, fault detection and recovery• Multi-agent approach• Multi-layered approach for distributed planning• Operational aspect of multi-modal transportation

www.rsTRAIL.nl
Transport Planning Problem – Orders
O = (f, v, s, Ts, d, Td, l, u, p)
f, v freight identifier / volume,s, d source / destination location,Ts, Td source / delivery time-window,l, u loading / unloading costs,p penalty.
• Transportation orders
• Infrastructure resources
• Transport resources
• Agents

www.rsTRAIL.nl
TPP – Infrastructure• Transportation orders
• Infrastructure resources
• Transport resources
• Agents

www.rsTRAIL.nl
TPP – Infrastructure model• Transportation orders
• Infrastructure resources
• Transport resources
• Agents

www.rsTRAIL.nl
TPP – Transport resources• Transportation orders
• Infrastructure resources
• Transport resources
• Agents
www.rsTRAIL.nl
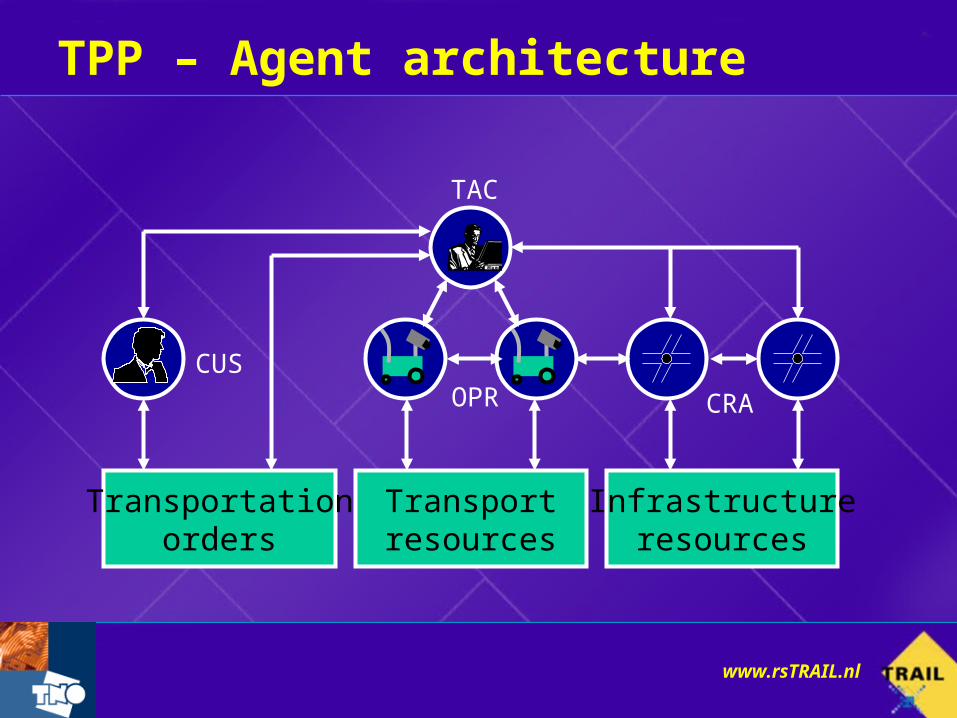
TPP – Agent architecture
Infrastructureresources
Transportresources
Transportationorders
CUS
TAC
OPR CRA

www.rsTRAIL.nl
What are incidents? Any event from outside the planning system that
cannot be anticipated with certainty.• new orders, changes in orders• road blocks, traffic jams• malfunctional vehicles
What is incident management?• Ensuring the correct operation of a system under
the events of incidents• Detection, repair and notification of problems
Incident Management

www.rsTRAIL.nl
Distributed operational planning
• Job-shop Scheduling with BlockingHatzack & Nebel (ECP 2001)
• JS scheduling: find an optimal allocation of a set R of scarce resources to a set of activities (jobs) J over time
• Blocking means that a resource is claimed by a job until it claims the next resource
• Agent plan: ((IR1, 0-2), (IR2, 5-7), (IR3, 8-9) …)

www.rsTRAIL.nl
Algorithm
• Schedule(Agent a, Route Rta) ≡
– consider the head of route Rta,
– t is the first time at which resource is not claimed by other agents,
– increment t and schedule at t until the tail of route Rta is (recursively) scheduled successfully.
www.rsTRAIL.nl
Algorithm (2)
• Process(Agent a, Order o) ≡– negotiate until agent a is allowed to schedule,– Agent a makes a schedule,– if agent a violates order o’s time-window:
negotiate until agent a is allowed to reroute,– after each reroute (of any agent), the above steps
are repeated

www.rsTRAIL.nl
A B C D
F I
E J
G H
Example
H C I J
H C I J
E F B G
E F B G
A B C D
Time Deadline

www.rsTRAIL.nl
H C I J
H C I J
E F B G
E F B G
A B C D
Time Deadline
EX: Determine Scheduling Order
(o – Mo) / Mo
(6 – 4) / 4 = 0.5
(7 – 4) / 4 = 0.75
(5 – 4) / 4 = 0.25
(6 – 4) / 4 = 0.5
(6 – 4) / 4 = 0.5
2
5
3
4
1

www.rsTRAIL.nl
EX: Compute Schedules
H C I J
H C I J
E F B G
E F B G
A B C D
Time Deadline
2
5
3
4
1 H C I J
H C I J
E F B G
E F B
A B C D
Time Deadline

www.rsTRAIL.nl
EX: Compute Schedules
H C I J
H C I J
E F B G
E F B G
A B C D
Time Deadline
2
5
3
4
1 H C I J
H C I J
E F B G
E F B G
A B C D
Time Deadline

www.rsTRAIL.nl
Experiments
• Used 3 different infrastructures,
• 20 transport agents each execute one order,
• Randomly chosen source-, destination location and fixed time-window.

www.rsTRAIL.nl
Results (averaged over 100 problem instances)
Number of alternatives
Ave
rage
% o
f de
lay
Number of alternatives
Tar
dine
ss
Tardiness aA Ca - a if Ca< aDelay { aA (Ca – Ma) / Ca } / |A|

www.rsTRAIL.nl
Future Plans
• Generate realistic problem instances,
• Repeat experiments with more different routing and conflict resolution algorithms,
• Repeat experiments under influence of incidents.

www.rsTRAIL.nl
Jonne Zutt
Delft University of Technology
Information Technology and Systems
Collective Agent Based Systems Group
Fault detection and recovery in multi-modaltransportation networks with autonomous mobile actors
TRAIL/TNO Project 16
Supervisors
Dr. C. Witteveen
Dr. ir. Z. Papp
Dr. ir. A.J.C. van Gemund