Embed Size (px)
Citation preview
FFAAKKUULLTTII KKEEJJUURRUUTTEERRAAAANN EELLEEKKTTRROONNIIKK && KKEEJJUURRUUTTEERRAAAANN KKOOMMPPUUTTEERR SUBJECT : CONTROL PRINCIPLES BEKG 2323
GROUP : DATE : PAGE : - 1 -
CHAPTER 7 : BODE PLOTS AND GAIN ADJUSTMENTS
COMPENSATION
Objectives
Students should be able to:
Draw the bode plots for first order and second order system.
Determine the stability through the bode plots.
Use the bode plots to find a suitable gain to meet the stability
specifications.
Design the gain adjustment compensator to meet the frequency
response specifications.
6.1 INTRODUCTION
Frequency response methods, discovered by Nyquist and Bode in the
1930s. Frequency response yields a new vantage point from which to
view feedback control system. This technique has distinct advantage in
the following situations:
1. When modeling transfer function from physical data.
2. When finding the stability of nonlinear systems.
3. In settling ambiguities when sketching a root locus.
FFAAKKUULLTTII KKEEJJUURRUUTTEERRAAAANN EELLEEKKTTRROONNIIKK && KKEEJJUURRUUTTEERRAAAANN KKOOMMPPUUTTEERR SUBJECT : CONTROL PRINCIPLES BEKG 2323
GROUP : DATE : PAGE : - 2 -
6.2 PLOTTING FREQUENCY RESPONSE
In this section, we learn a method to draw the frequency response
using the bode plot technique. GG jMjG can be plotted in
several ways; two of them are
1. as a function of frequency, with separate magnitude and phase
plots.
The magnitude can be plotted in decibels (dB) vs log ,
where dB = 20 log M.
The phase curve is plotted as phase angle vs log .
The motivation for these plots is shown in next section.
2. as a polar plot, where the phasor length is the magnitude and the
phasor angle is the phase.
Based on the s-plane concept
Magnitude response at particular freq is the product of
the vector length from the zeroes of G(s) divided by the
product of vector lengths from the poles of G(s) drawn
to points on the imaginary axis.
Phase response is the sum of angles from the zeroes of
G(s) minus the sum of the angles from the poles of G(s)
drawn to points on the imaginary axis.
FFAAKKUULLTTII KKEEJJUURRUUTTEERRAAAANN EELLEEKKTTRROONNIIKK && KKEEJJUURRUUTTEERRAAAANN KKOOMMPPUUTTEERR SUBJECT : CONTROL PRINCIPLES BEKG 2323
GROUP : DATE : PAGE : - 3 -
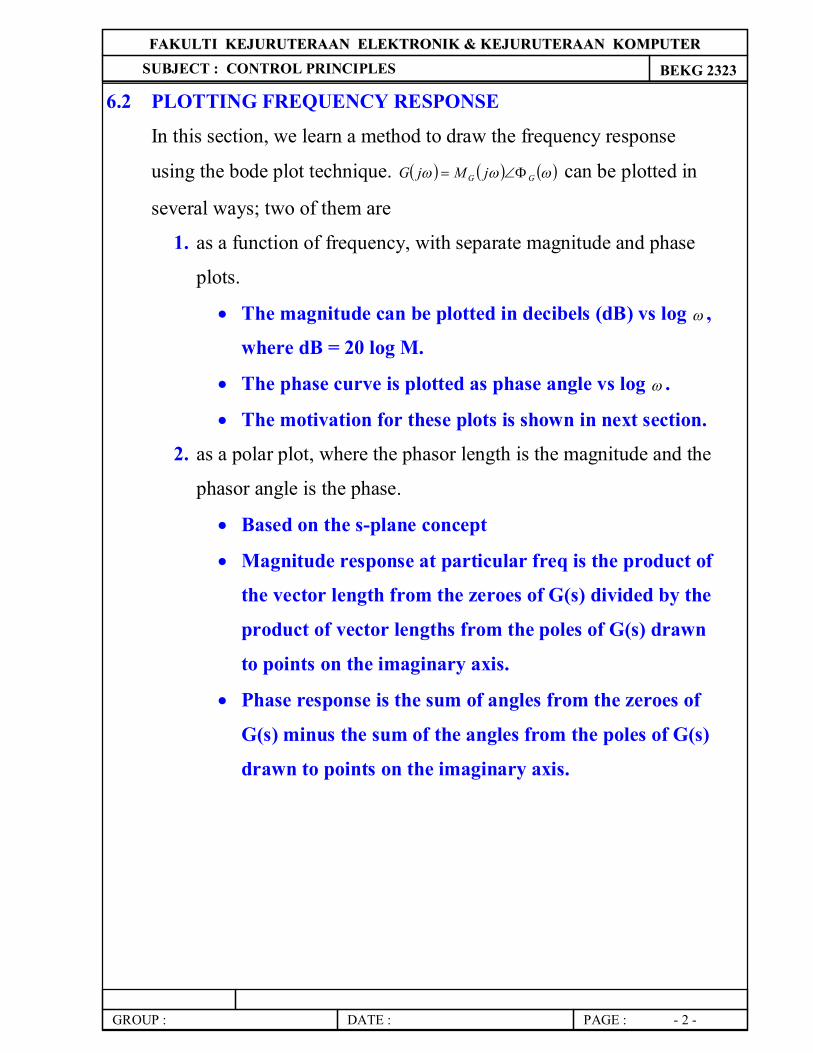
Ex 1: Demonstrates how to obtain analytical expression for
frequency response and make a plot of the result.
Problem: Find the analytical expression for the magnitude freq
response and the phase freq response for a system G(s) = 1/(s+2).
Also, plot both the separate magnitude and phase diagrams.
Solution:
Substitute s=j in the system and obtaining G(j )=1/(j+2)
G(j )=1/(j+2) = (2- j )/( 2+4)
The magnitude of this complex number, 4/1 2 MjG
The phase angle, G(j )= 2/tan 1
Refer to Figure 1 for the plot (actual Plot):
Figure 1
FFAAKKUULLTTII KKEEJJUURRUUTTEERRAAAANN EELLEEKKTTRROONNIIKK && KKEEJJUURRUUTTEERRAAAANN KKOOMMPPUUTTEERR SUBJECT : CONTROL PRINCIPLES BEKG 2323
GROUP : DATE : PAGE : - 4 -
7.3 Asymptotic Approximations: Bode Plots
The log-magnitude and phase freq response curves as functions of log
are called Bode plots or Bode diagrams.
Sketching the bode plots can be simplified because they can be
approximated as sequence of straight lines.
Consider the following transfer function:
n
mn
pspspsszszszsKsG
........
21
21
Then, the magnitude frequency response is the product of the
magnitude freq response of each term, or
jsn
m
k
pspspss
zszszsKjG
)(...)()(
...)()(
21
21
Thus, if we know the magnitude response of each pole and zero term,
we can find the total magnitude response. The process can be
simplified by working with the logarithm of the magnitude since the
zero terms’ magnitude responses would be added and the pole terms’
magnitude responses subtracted, rather than, respectively, multiplied
or divided, to yield the logarithm of the total magnitude response.
Converting the magnitude response into dB, we obtain
15.10...log20log20...
log20)(log20log20)(log20
1
21
jsm pss
zszsKjG
Thus, if we knew the response of each term, the algebraic sum would
yield the total response in dB. Further, if we could make an
approximation of each term that would consist only of straight lines,
graphic addition of terms would be greatly simplified.

FFAAKKUULLTTII KKEEJJUURRUUTTEERRAAAANN EELLEEKKTTRROONNIIKK && KKEEJJUURRUUTTEERRAAAANN KKOOMMPPUUTTEERR SUBJECT : CONTROL PRINCIPLES BEKG 2323
GROUP : DATE : PAGE : - 5 -
Bode Plots for G(s) = (s+a)
Consider a function, G(s) = (s+a), for which we want to sketch
separate logarithmic magnitude and phase response plots. Letting
s = jω, we have
1)(
ajaajjG
At low frequencies when ω approaches zero,
ajG
The magnitude response in dB is
aM log20log20
where jGM and is a constant. Equation above is shown plotted in
Figure 2 (a) from ω = 0.01a to a.
At high frequencies where ω >>a, ω = 0.01a to a becomes
00 9090
aa
ajajG
The magnitude response in dB is
log20log20log20log20 a
aM
where a . Notice from the middle term that the high-frequency
approximation is equal to the low frequency approximation when
a , and increases for a .
If we plot dB, Mlog20 , against log ω, equation
log20log20log20log20 a
aM becomes a straight line:
xy 20
where ,log20 My and logx . The line has a slope of 20 when plotted
as dB vs. log ω.
FFAAKKUULLTTII KKEEJJUURRUUTTEERRAAAANN EELLEEKKTTRROONNIIKK && KKEEJJUURRUUTTEERRAAAANN KKOOMMPPUUTTEERR SUBJECT : CONTROL PRINCIPLES BEKG 2323
GROUP : DATE : PAGE : - 6 -
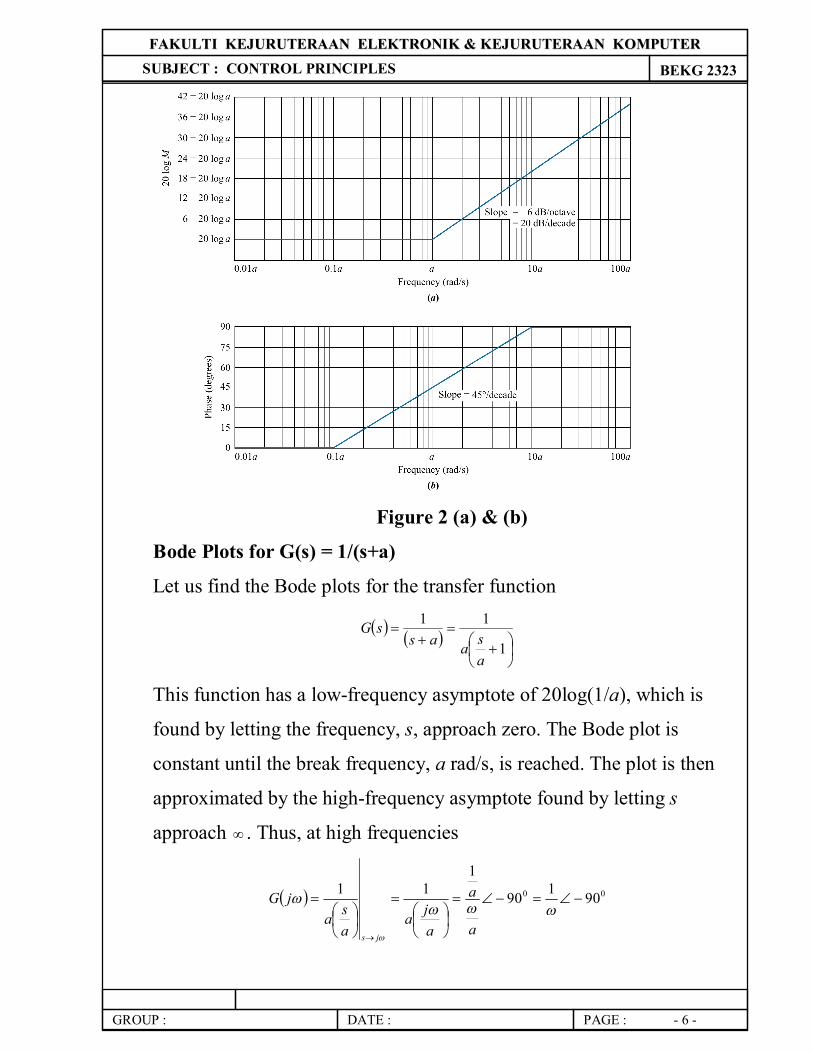
Figure 2 (a) & (b)
Bode Plots for G(s) = 1/(s+a)
Let us find the Bode plots for the transfer function
1
11
asaas
sG
This function has a low-frequency asymptote of 20log(1/a), which is
found by letting the frequency, s, approach zero. The Bode plot is
constant until the break frequency, a rad/s, is reached. The plot is then
approximated by the high-frequency asymptote found by letting s
approach . Thus, at high frequencies
00 90190
111
a
a
aja
asa
jG
js
FFAAKKUULLTTII KKEEJJUURRUUTTEERRAAAANN EELLEEKKTTRROONNIIKK && KKEEJJUURRUUTTEERRAAAANN KKOOMMPPUUTTEERR SUBJECT : CONTROL PRINCIPLES BEKG 2323
GROUP : DATE : PAGE : - 7 -
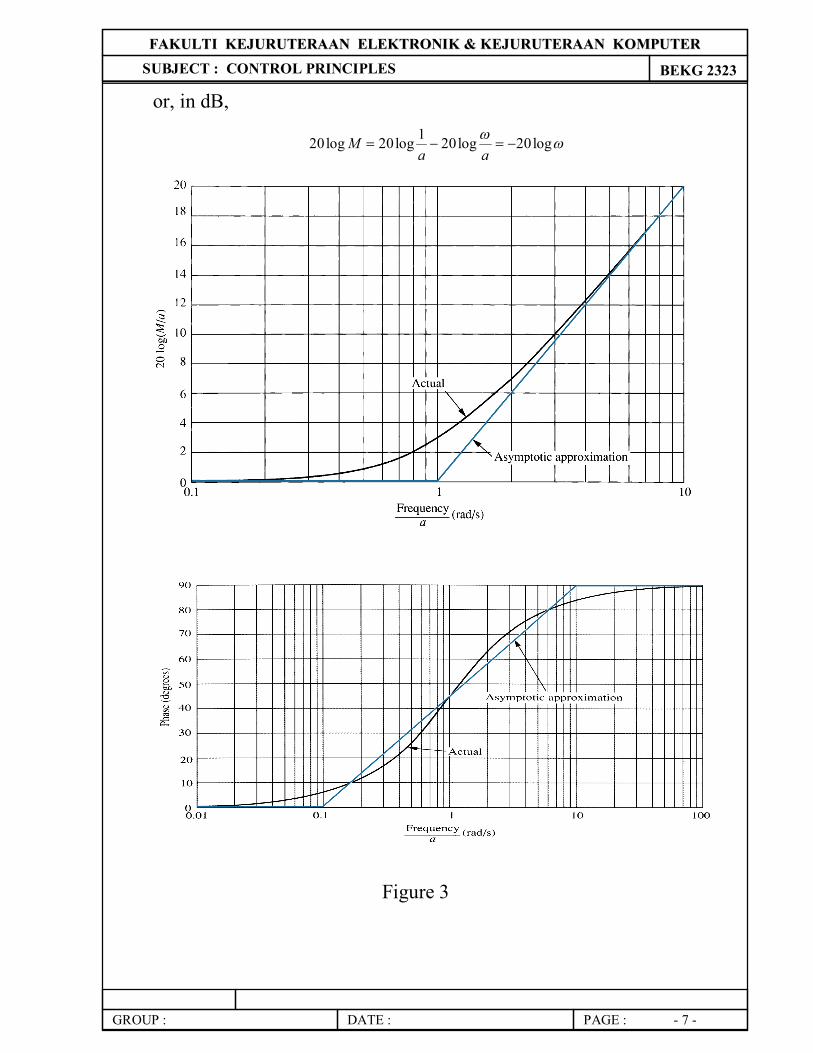
or, in dB,
log20log201log20log20 aa
M
Figure 3
FFAAKKUULLTTII KKEEJJUURRUUTTEERRAAAANN EELLEEKKTTRROONNIIKK && KKEEJJUURRUUTTEERRAAAANN KKOOMMPPUUTTEERR SUBJECT : CONTROL PRINCIPLES BEKG 2323
GROUP : DATE : PAGE : - 8 -
Notice from the middle term that the high-frequency approximation
equals the low-frequency approximation when a , and decreases for
a . This result is similar to equation log20log20log20log20 a
aM ,
except the slope is negative rather than positive. The Bode log-
magnitude diagram will decrease at a rate of 20 dB/decade rather than
increase at a rate of 20 dB/decade after the break frequency.
The phase plot is the negative of the previous example sine the
function is the inverse. The phase begins at 00 and reaches -900 at high
frequencies, going through -450 at the break frequency. Both the Bode
normalized and scaled log-magnitude and phase plot are shown in
Figure 4 (d).
Bode Plots for G(s) =s
Our next function, G(s) = s, has only a high-frequency asymptote.
Letting s=jω, the magnitude is 20 log ω, which is the same as
equation log20log20log20log20 a
aM . Hence, the Bode magnitude
lot is a straight line drawn with a +20 dB/decade slope passing through
zero dB when ω = 1. The phase plot, which is a constant +900, is
shown with the magnitude plot in Figure 4(a).
Bode Plots for G(s) = 1/s
The frequency response of the inverse of the preceding function, G(s)
= 1/s, is shown in Figure 3(b) and is a straight line with a -20
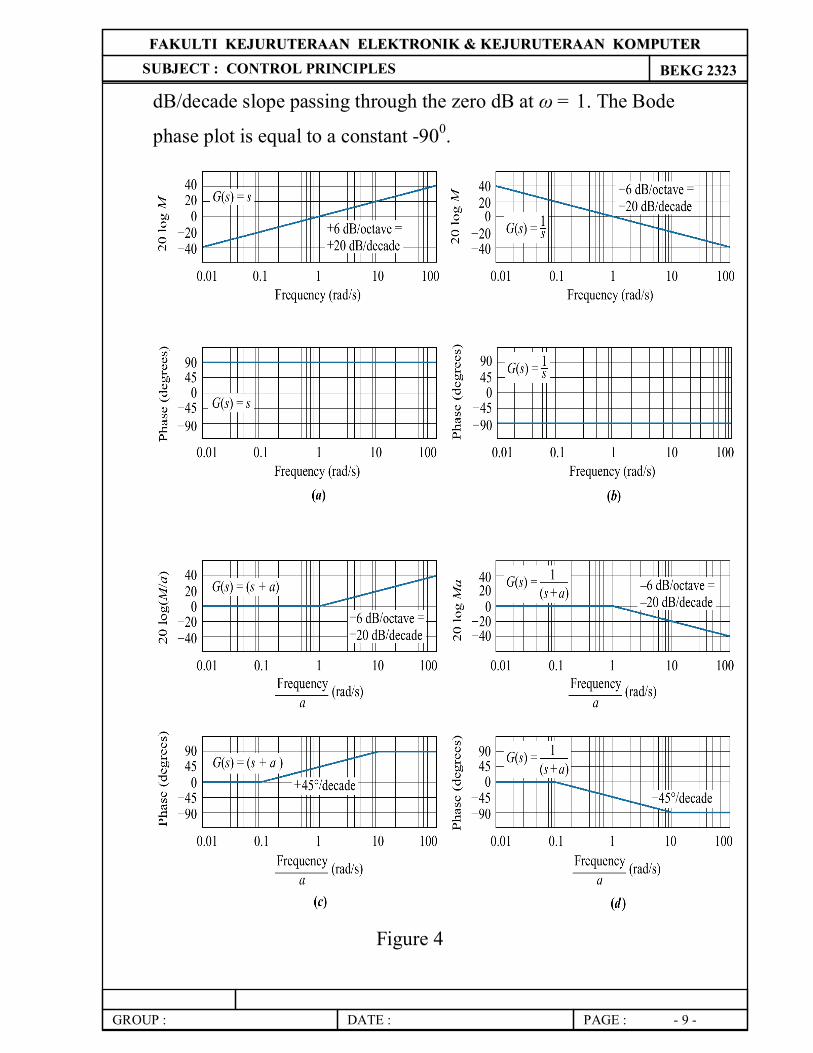
FFAAKKUULLTTII KKEEJJUURRUUTTEERRAAAANN EELLEEKKTTRROONNIIKK && KKEEJJUURRUUTTEERRAAAANN KKOOMMPPUUTTEERR SUBJECT : CONTROL PRINCIPLES BEKG 2323
GROUP : DATE : PAGE : - 9 -
dB/decade slope passing through the zero dB at ω = 1. The Bode
phase plot is equal to a constant -900.
Figure 4
FFAAKKUULLTTII KKEEJJUURRUUTTEERRAAAANN EELLEEKKTTRROONNIIKK && KKEEJJUURRUUTTEERRAAAANN KKOOMMPPUUTTEERR SUBJECT : CONTROL PRINCIPLES BEKG 2323
GROUP : DATE : PAGE : - 10 -
Ex 2: Bode plots for ratio of first-order factors.
Problem: Draw the Bode plots for the system shown in figure below,
where 21/3 ssssKsG
Solution:
Bode plot for open loop system
The bode plot is the sum of each first order system
Use the normalized plot in order to determine the cut-off
frequency easier.
The normalized TF is:
1
21
132
3
sss
sKsG
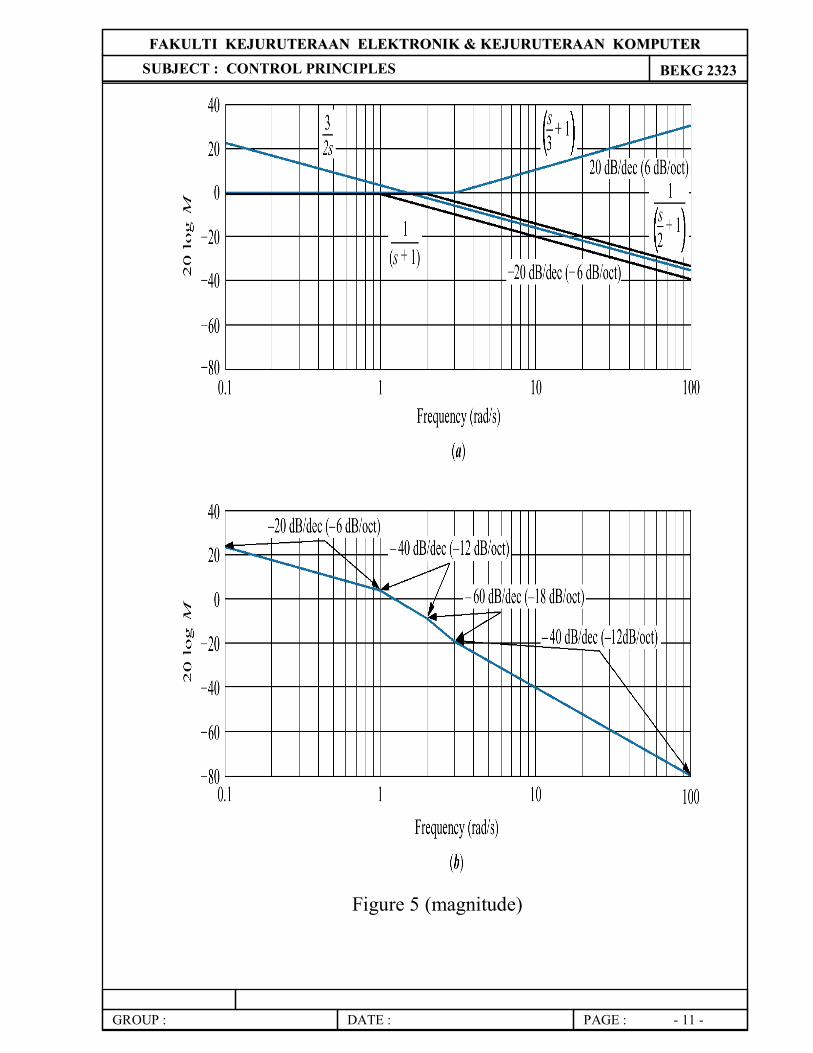
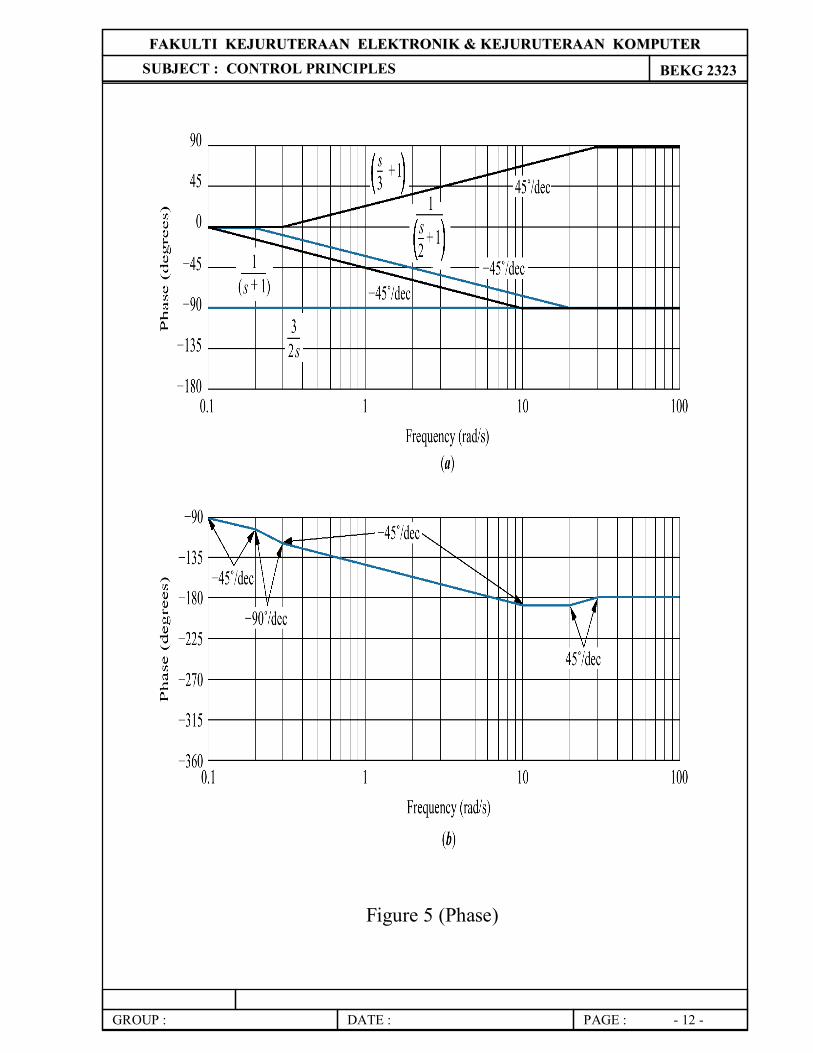
So, the cut-off frequencies are at 1, 2, and 3.
The magnitude plot should begin a decade below ( 1.0 ) the
lowest freq break and extend a decade above the highest break
freq ( 100 ).
K is chosen at 1 – easy to denormalized later for any value of K
The plot is shown in Figure 5.
FFAAKKUULLTTII KKEEJJUURRUUTTEERRAAAANN EELLEEKKTTRROONNIIKK && KKEEJJUURRUUTTEERRAAAANN KKOOMMPPUUTTEERR SUBJECT : CONTROL PRINCIPLES BEKG 2323
GROUP : DATE : PAGE : - 11 -
Figure 5 (magnitude)
FFAAKKUULLTTII KKEEJJUURRUUTTEERRAAAANN EELLEEKKTTRROONNIIKK && KKEEJJUURRUUTTEERRAAAANN KKOOMMPPUUTTEERR SUBJECT : CONTROL PRINCIPLES BEKG 2323
GROUP : DATE : PAGE : - 12 -
Figure 5 (Phase)
FFAAKKUULLTTII KKEEJJUURRUUTTEERRAAAANN EELLEEKKTTRROONNIIKK && KKEEJJUURRUUTTEERRAAAANN KKOOMMPPUUTTEERR SUBJECT : CONTROL PRINCIPLES BEKG 2323
GROUP : DATE : PAGE : - 13 -
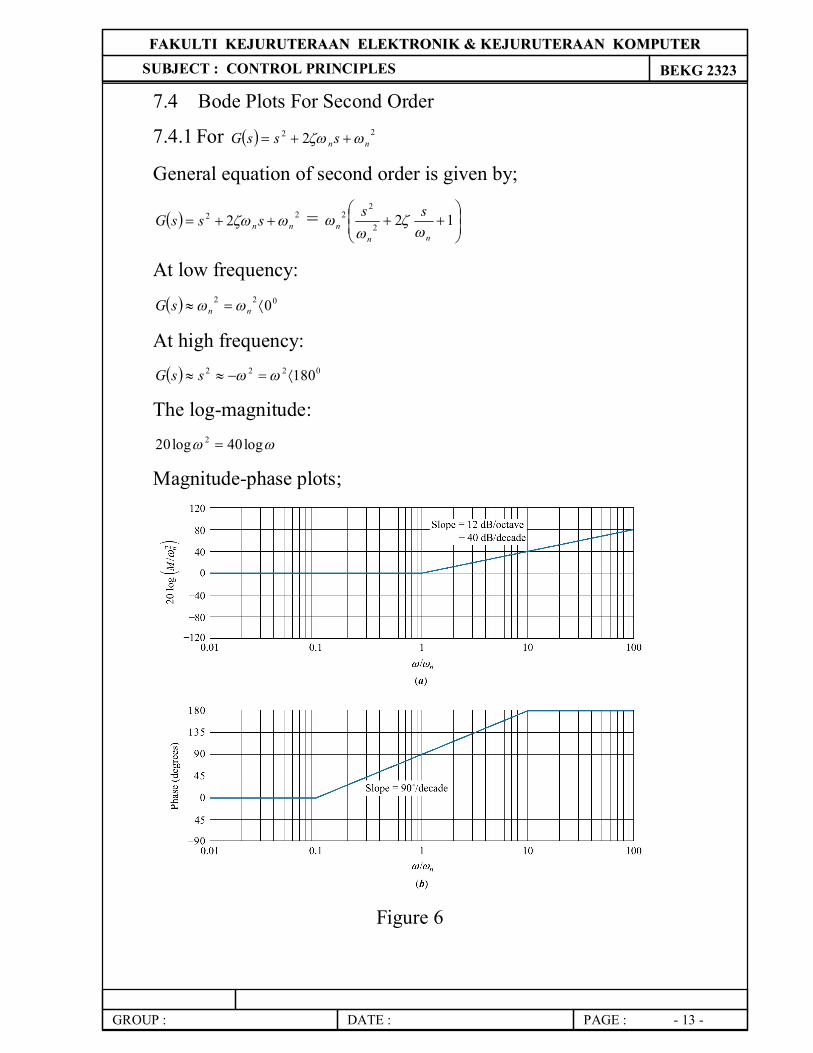
7.4 Bode Plots For Second Order
7.4.1 For 22 2 nnsssG
General equation of second order is given by;
22 2 nn sssG =
122
22
nnn
ss
At low frequency:
022 0 nnsG
At high frequency: 0222 180 ssG
The log-magnitude:
log40log20 2
Magnitude-phase plots;
Figure 6
FFAAKKUULLTTII KKEEJJUURRUUTTEERRAAAANN EELLEEKKTTRROONNIIKK && KKEEJJUURRUUTTEERRAAAANN KKOOMMPPUUTTEERR SUBJECT : CONTROL PRINCIPLES BEKG 2323
GROUP : DATE : PAGE : - 14 -
7.4.2 For 22 2/1 nn sssG
Magnitude-phase plots:
Reverse of the plots in section 7.4.1.
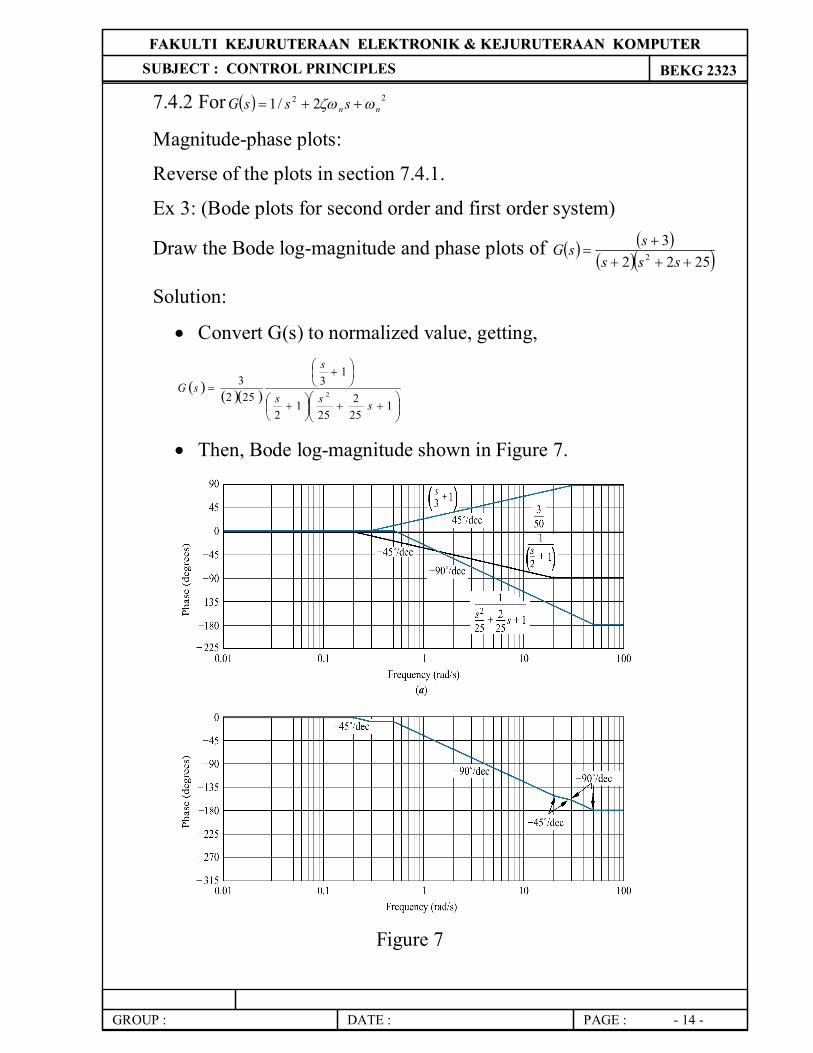
Ex 3: (Bode plots for second order and first order system)
Draw the Bode log-magnitude and phase plots of 2522
32
sss
ssG
Solution:
Convert G(s) to normalized value, getting,
1
252
251
2
13
2523
2
sss
s
sG
Then, Bode log-magnitude shown in Figure 7.
Figure 7

FFAAKKUULLTTII KKEEJJUURRUUTTEERRAAAANN EELLEEKKTTRROONNIIKK && KKEEJJUURRUUTTEERRAAAANN KKOOMMPPUUTTEERR SUBJECT : CONTROL PRINCIPLES BEKG 2323
GROUP : DATE : PAGE : - 15 -
7.5 Stability, Gain Margin, and Phase Margin via Bode Plots
7.5.1 Determining Stability
The specification below should be get in order to ensure the stability
of the system using Bode Plots
The closed loop system will be stable if the frequency response
has a gain less than unity when phase is 1800.
Ex 4:
Use Bode Plots to determine the range of K within which the unity
feedback system is stable. Let 542
sssKsG
Solution:
Convert G(s) to normalized value, yields,
1
51
41
2
140 sssKsG
Choose K = 40 in order to start the plots at 0db
Break frequency at 2, 4, and 5
Lowest frequency, 01.0 ; Highest frequency, 100
Plots,
FFAAKKUULLTTII KKEEJJUURRUUTTEERRAAAANN EELLEEKKTTRROONNIIKK && KKEEJJUURRUUTTEERRAAAANN KKOOMMPPUUTTEERR SUBJECT : CONTROL PRINCIPLES BEKG 2323
GROUP : DATE : PAGE : - 16 -
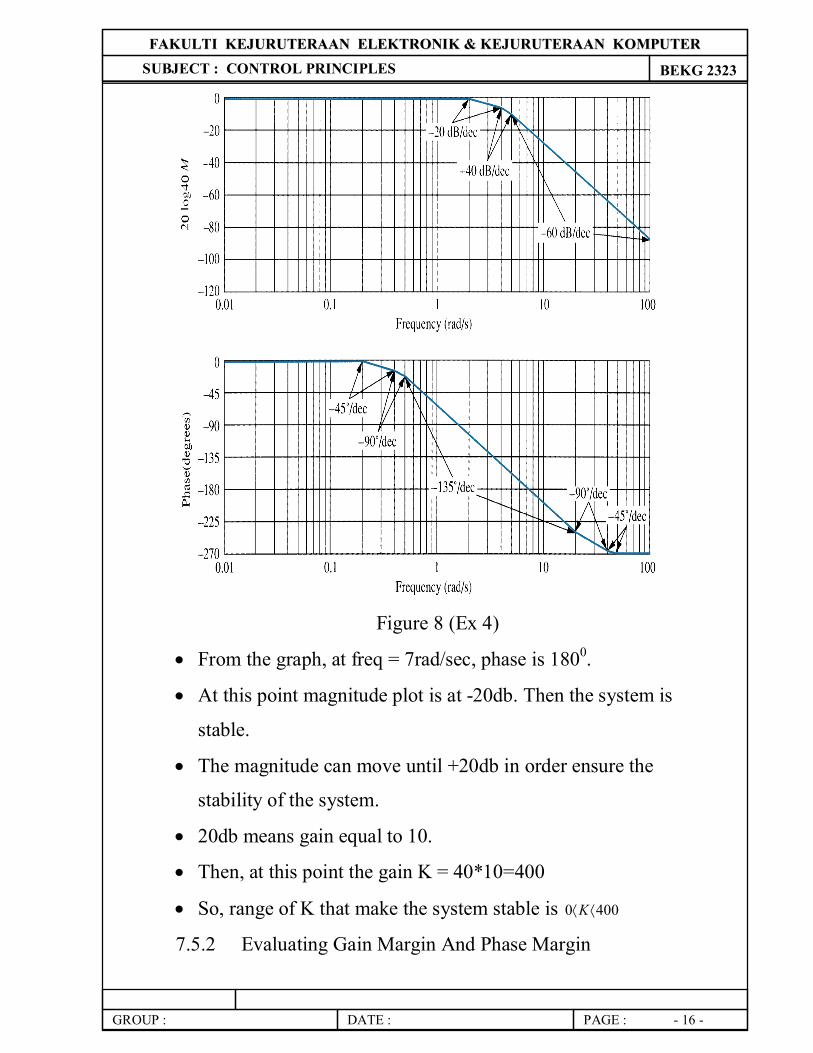
Figure 8 (Ex 4)
From the graph, at freq = 7rad/sec, phase is 1800.
At this point magnitude plot is at -20db. Then the system is
stable.
The magnitude can move until +20db in order ensure the
stability of the system.
20db means gain equal to 10.
Then, at this point the gain K = 40*10=400
So, range of K that make the system stable is 4000 K
7.5.2 Evaluating Gain Margin And Phase Margin
FFAAKKUULLTTII KKEEJJUURRUUTTEERRAAAANN EELLEEKKTTRROONNIIKK && KKEEJJUURRUUTTEERRAAAANN KKOOMMPPUUTTEERR SUBJECT : CONTROL PRINCIPLES BEKG 2323
GROUP : DATE : PAGE : - 17 -
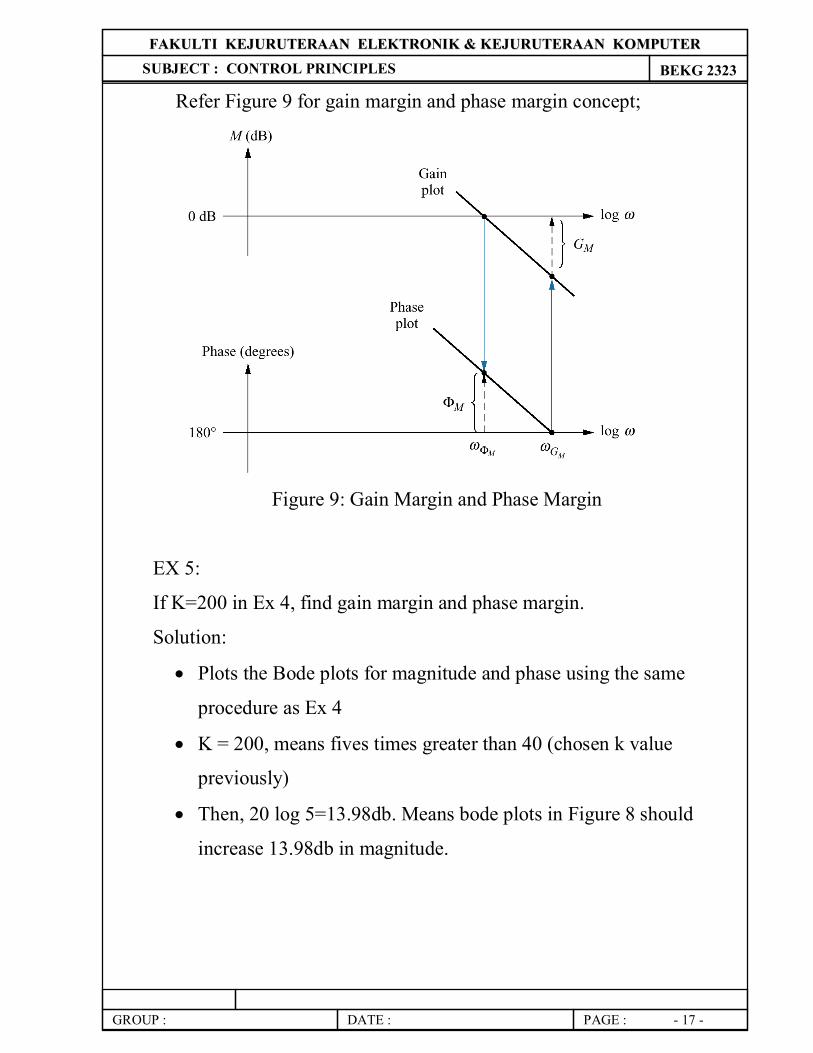
Refer Figure 9 for gain margin and phase margin concept;
Figure 9: Gain Margin and Phase Margin
EX 5:
If K=200 in Ex 4, find gain margin and phase margin.
Solution:
Plots the Bode plots for magnitude and phase using the same
procedure as Ex 4
K = 200, means fives times greater than 40 (chosen k value
previously)
Then, 20 log 5=13.98db. Means bode plots in Figure 8 should
increase 13.98db in magnitude.
FFAAKKUULLTTII KKEEJJUURRUUTTEERRAAAANN EELLEEKKTTRROONNIIKK && KKEEJJUURRUUTTEERRAAAANN KKOOMMPPUUTTEERR SUBJECT : CONTROL PRINCIPLES BEKG 2323
GROUP : DATE : PAGE : - 18 -
Therefore, to find gain margin look at phase plot and the freq
when phase is 180o. At this freq, determine from the magnitude
plot how much the gain can be increased before reaching 0dB.
From Figure 8, the phase angle is 180o at approximately 7 rad/s.
On the magnitude plot, the gain is -20 dB + 13.98 dB = -6.02 dB.
Thus, the gain margin is 6.02 dB.
For phase margin, refer freq at magnitude plot where the gain is
0 dB. At this freq, look on the phase plot to find the difference
between the phase and 180o. The difference is phase margin.
From Figure 8, remember that the magnitude plot is 13.98 dB
lower than actual plot, the 0 dB crossing (-13.98 dB for the
normalized plot shown in Figure 8) occurs at 5.5 rad/s.
At this freq, the phase angle is -165o. Thus, the phase margin is
-165-(-180) = 15o
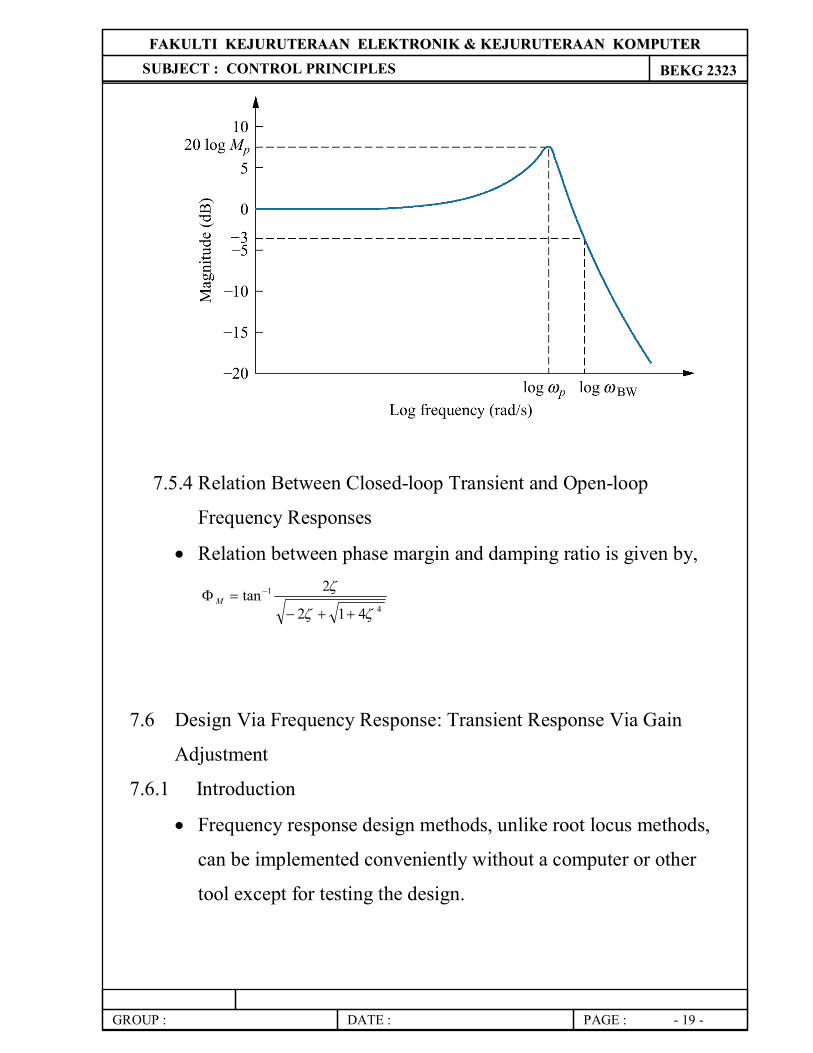
7.5.3 Relation Between Closed-loop Transient and Closed-Loop
Frequency Responses.
A relationship exists between the peak value of the closed-loop
magnitude response and the damping ratio is given by equation
below,
212
1
pM
This condition happens at a frequency p , of
221 np
Representive log-magnitude plots,
FFAAKKUULLTTII KKEEJJUURRUUTTEERRAAAANN EELLEEKKTTRROONNIIKK && KKEEJJUURRUUTTEERRAAAANN KKOOMMPPUUTTEERR SUBJECT : CONTROL PRINCIPLES BEKG 2323
GROUP : DATE : PAGE : - 19 -
7.5.4 Relation Between Closed-loop Transient and Open-loop
Frequency Responses
Relation between phase margin and damping ratio is given by,
4
1
412
2tan
M
7.6 Design Via Frequency Response: Transient Response Via Gain
Adjustment
7.6.1 Introduction
Frequency response design methods, unlike root locus methods,
can be implemented conveniently without a computer or other
tool except for testing the design.
FFAAKKUULLTTII KKEEJJUURRUUTTEERRAAAANN EELLEEKKTTRROONNIIKK && KKEEJJUURRUUTTEERRAAAANN KKOOMMPPUUTTEERR SUBJECT : CONTROL PRINCIPLES BEKG 2323
GROUP : DATE : PAGE : - 20 -
The bode plots can be designed easily using asymptotic
approximations and gain can be read from there.
7.6.2 Gain Adjustment
From previous discussion the phase margin is relates to the
damping ratio (equivalently percent overshoot).
Thus, any varying in phase margin will result on varying the
percent overshoot.
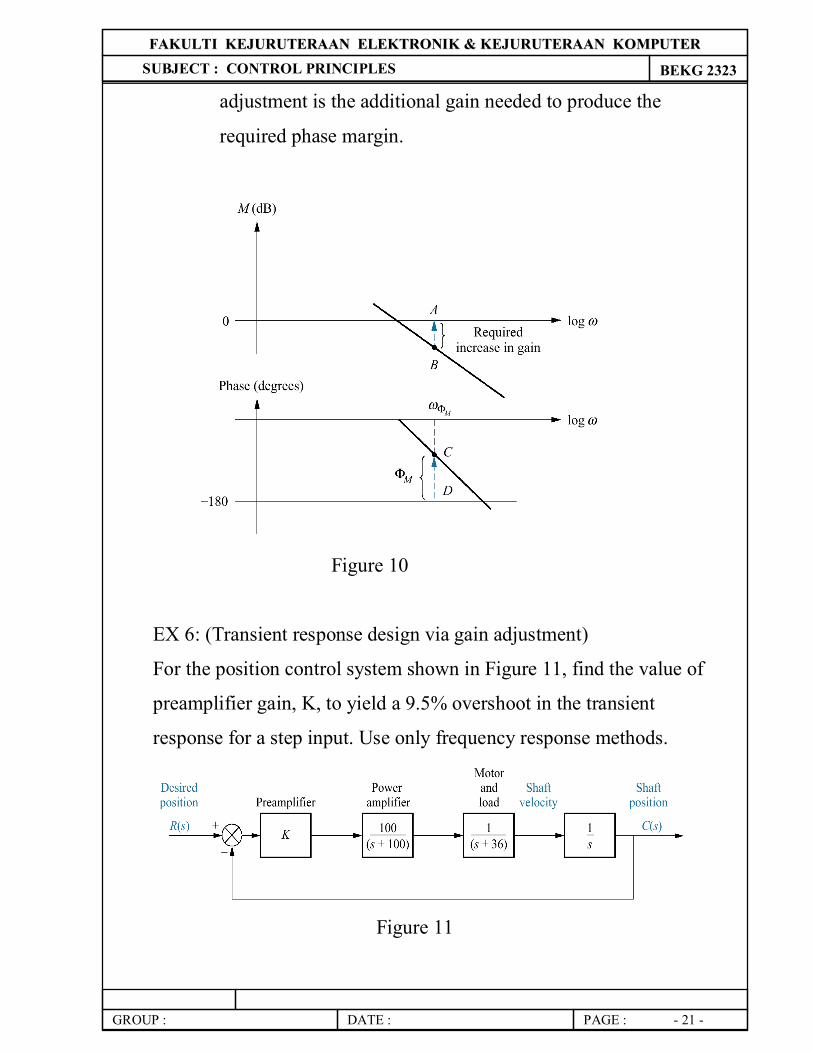
From Figure 10, if we desire a phase margin, M , represented by
CD, we would have to raise the magnitude curve by AB.
Therefore, a simple gain adjustment can be used to design phase
margin and, hence, percent overshoot.
Procedure involve in designing the gain adjustment compensator:
a) Draw the bode magnitude and phase plots for a convenient
value of gain.
b) Using equations below to determine the required phase
margin from the percent overshoot.
100%ln
100%ln
22 OS
OS
4
1
412
2tan
M
c) Find the frequency, M , on the bode phase diagram that
yields the desired phase margin, as shown in Figure 10.
d) Change the gain by the amount of AB to force the magnitude
curve to go through 0 dB at M . The amount of gain
FFAAKKUULLTTII KKEEJJUURRUUTTEERRAAAANN EELLEEKKTTRROONNIIKK && KKEEJJUURRUUTTEERRAAAANN KKOOMMPPUUTTEERR SUBJECT : CONTROL PRINCIPLES BEKG 2323
GROUP : DATE : PAGE : - 21 -
adjustment is the additional gain needed to produce the
required phase margin.
Figure 10
EX 6: (Transient response design via gain adjustment)
For the position control system shown in Figure 11, find the value of
preamplifier gain, K, to yield a 9.5% overshoot in the transient
response for a step input. Use only frequency response methods.
Figure 11
FFAAKKUULLTTII KKEEJJUURRUUTTEERRAAAANN EELLEEKKTTRROONNIIKK && KKEEJJUURRUUTTEERRAAAANN KKOOMMPPUUTTEERR SUBJECT : CONTROL PRINCIPLES BEKG 2323
GROUP : DATE : PAGE : - 22 -
Solution:
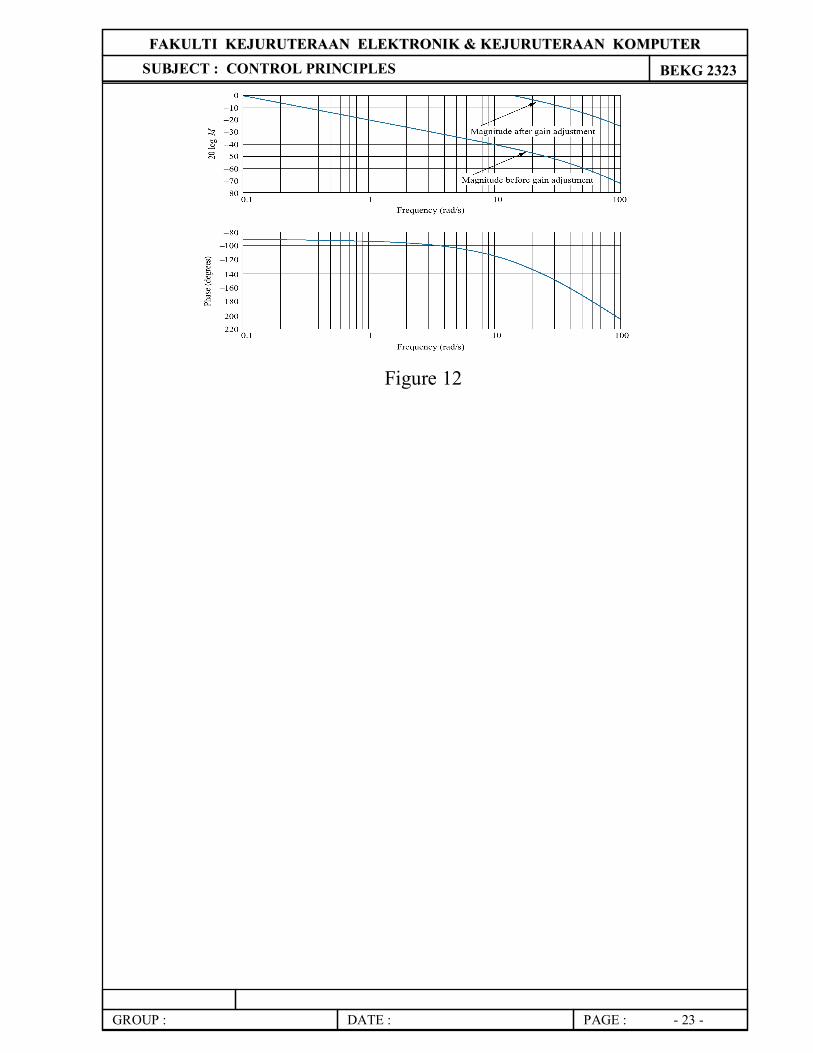
Follow the procedure stated previously,
Choose K=3.6 to start the magnitude plot at 0 dB at 1.0 in
Figure 12.
Using equation above, a 9.5% overshoot implies 6.0 for the
closed-loop dominant poles. From equation for phase margin
yields a 59.2o phase margin for a damping ratio of 0.6.
Locate on the phase plot the frequency that yields a 59.2o phase
margin. This frequency is found where the phase angle is the
difference between -180o and 59.2o, or -120.8o. The value of the
phase margin frequency is 14.8 rad/s.
At a freq of 14.8 rad/s on the magnitude plot, the gain is found to
be -44.2 dB. This magnitude has to be raised to 0 dB to yield the
required phase margin. Since the log-magnitude plot was drawn
for K=3.6, a 44.2 dB increase, or K=3.6*162.2=583.9, would
yield the required phase margin for a 9.48% overshoot.
The gain-adjusted open-loop transfer function is
1003658390
ssssG
FFAAKKUULLTTII KKEEJJUURRUUTTEERRAAAANN EELLEEKKTTRROONNIIKK && KKEEJJUURRUUTTEERRAAAANN KKOOMMPPUUTTEERR SUBJECT : CONTROL PRINCIPLES BEKG 2323
GROUP : DATE : PAGE : - 23 -
Figure 12