Embed Size (px)
Citation preview
EXPERIMENTAL STUDY ON DYNAMIC BEHAVIOUR OF TROPICAL RESIDUAL SOILS IN MALAYSIA
LIM JUN XIAN
MASTER OF ENGINEERING SCIENCE
LEE KONG CHIAN FACULTY OF ENGINEERING AND SCIENCE
UNIVERSITI TUNKU ABDUL RAHMAN FEBRUARY 2018


EXPERIMENTAL STUDY ON DYNAMIC BEHAVIOUR OF
TROPICAL RESIDUAL SOILS IN MALAYSIA
By
LIM JUN XIAN
A dissertation submitted to the Department of Civil Engineering,
Lee Kong Chian Faculty of Engineering and Science,
Universiti Tunku Abdul Rahman,
in partial fulfillment of the requirements for the degree of
Master of Engineering Science
February 2018
ii
ABSTRACT
EXPERIMENTAL STUDY ON DYNAMIC BEHAVIOUR OF
TROPICAL RESIDUAL SOILS IN MALAYSIA
Lim Jun Xian
In soil dynamics, most of the studies carried out abroad focused on
investigating the dynamic behaviours of pure sand and clay. Very limited
studies have been focused on the dynamic behaviours of tropical residual soil
in Malaysia. Although the 1g shaking table test can be used to investigate the
dynamic behaviours of soil, the accuracy of the integrated displacement data is
subjected to uncertainties. The present study aims to investigate the dynamic
properties (namely shear modulus and damping ratio) of two selected tropical
residual soils (i.e. sandy silt and sandy clay) and a sand mining trail in
Malaysia. Three different setups (i.e. large laminar shear box test, small
chamber test with positive air pressure, and small sample test with suction)
were tested on a 1g shaking table to evaluate the stress-strain relationship of
soils, and hence their secant shear modulus and damping ratios. The
experimental results were then compared with the established findings from
literature. The large laminar shear box test and small chamber test with
positive air pressure were capable of testing the dynamic properties of soils
covering for large (0.077 % - 1.48 %) and medium (0.017 % - 0.077 %) shear
strain amplitudes of soil deformation, respectively. The results from the small
sample test with suction were discarded owing to the noise effect and problem
iii
of data synchronization. The experimental shear moduli for sand mining trail
were found to agree well with the established degradation curves of sand. The
results of sand mining trail also could fit with the established curves of clay
owing to low plasticity index. However, the residual soils (sandy silt and
sandy clay) could not fit to the established degradation curves of sand and
clay. The damping ratios of the residual soils also deviated from the
established damping curves. It can be concluded that the studied topical
residual soils in Malaysia are unique and behave neither as pure sand nor clay.
Fine content was found to be one of the important parameters on the dynamic
properties of the studied tropical residual soils.
iv
ACKNOWLEDGEMENTS
I would like to express my gratitude to my research main supervisors, Ir. Dr.
Lee Min Lee and co-supervisor, Prof. Dr. Yasuo Tanaka. They are very
supportive and patience towards my research. Their continuous
encouragement and invaluable guidance have deepened my understanding on
all important aspects in academic study, ability of planning in research, and
beneficially enhance my personal development as well. Through the
progressive development, I manage to conduct experiments independently and
collaborate efficiently with the laboratory assistants. I would also like to thank
all the laboratory staffs in Universiti Tunku Abdul Rahman for their relentless
technical support in my research. Lastly, I would like to appreciate kindness of
my parents, brother and the enormous effort by all previous researchers.
Without the fruitful research works contributed by the previous scholars, my
research would not be achieved.

v
APPROVAL SHEET
This dissertation/thesis entitled “EXPERIMENTAL STUDY ON
DYNAMIC BEHAVIOUR OF TROPICAL RESIDUAL SOILS IN
MALASYIA” was prepared by LIM JUN XIAN and submitted as partial
fulfillment of the requirements for the degree of Master of Engineering
Science at Universiti Tunku Abdul Rahman.
Approved by:
___________________________
(Ir. Dr. Lee Min Lee) Date:…………………..
Associate Professor/Supervisor
Department of Civil Engineering
Faculty of Engineering Science
Universiti Tunku Abdul Rahman
___________________________
(Prof. Dr. Yasuo Tanaka) Date:…………………..
Professor/Co-Supervisor
Department of Civil Engineering
Faculty of Engineering Science
Universiti Tunku Abdul Rahman

vi
FACULTY OF ENGINEERING SCIENCE
UNIVERSITI TUNKU ABDUL RAHMAN
Date: __________________
SUBMISSION OF FINAL YEAR PROJECT /DISSERTATION/THESIS
It is hereby certified that LIM JUN XIAN (ID No: 15UEM08242) has completed
this dissertation/ thesis entitled “EXPERIMENTAL STUDY ON DYNAMIC
BEHAVIOUR OF TROPICAL RESIDUAL SOILS IN MALAYSIA” under the
supervision of Ir. Dr. Lee Min Lee (Supervisor) from the Department of Civil
Engineering, Faculty of Engineering Science , and Prof. Dr. Yasuo Tanaka (Co-
Supervisor) from the Department of Civil Engineering, Faculty of Engineering
Science.
I understand that University will upload softcopy of my dissertation/ thesis in pdf
format into UTAR Institutional Repository, which may be made accessible to
UTAR community and public.
Yours truly,
____________________
(LIM JUN XIAN)

vii
DECLARATION
I hereby declare that the dissertation is based on my original work except for
quotations and citations which have been duly acknowledged. I also declare
that it has not been previously or concurrently submitted for any other degree
at UTAR or other institutions.
Name ____________________________
Date _____________________________
viii
TABLE OF CONTENTS
Page
ABSTRACT ii
ACKNOWLEDGEMENTS iv
APPROVAL SHEET v
SUBMISSION SHEET vi
DECLARATION vii
LIST OF TABLES xi
LIST OF FIGURES xii
LIST OF SYMBOLS / ABBREVIATIONS xx
CHAPTER
1.0 INTRODUCTION 1
1.1 Background Study 1
1.2 Problem Statement 3
1.3 Aims and Objectives 4
1.4 Research Framework 5
1.5 Scope of Study 7
1.6 Structure of Thesis 7
2.0 LITERATURE REVIEW 10
2.1 Introduction 10
2.2 Seismic Activities in Malaysia 10
2.3 Tropical Residual Soils in Malaysia 12
2.4 Secant Shear Modulus and Damping Ratio 14
2.5 Shear Modulus Degradation Curves for Soils 16
2.5.1 Shear Modulus Degradation Curves
for Sandy Soils 18
2.5.2 Shear Modulus Degradation Curves for
Silt and Clay 22
2.6 Relationship between Damping Ratio and
Shear Strain Amplitude 25
2.7 Laboratory Study on Dynamic Behaviours of Soil 27
2.7.1 Hollow Cylinder Simple Shear Test 27
2.7.2 Cyclic Triaxial Test 31
2.7.3 Cyclic Direct Simple Shear Test 37
2.7.4 Shaking Table Test 40
2.8 Signal Processing 45
2.8.1 Earthquake Records 45
2.8.2 Baseline Correction 48
2.8.3 Digital Filtering 51
2.9 Concluding Remarks 54
3.0 METHODOLOGY 56
ix
3.1 Introduction 56
3.2 Soil Sampling and Physical Tests 56
3.2.1 Soil Sampling 56
3.2.2 Soil Physical Tests 58
3.3 Apparatus and Instrumentation 59
3.3.1 Shaking Table System 59
3.3.2 Accelerometer 63
3.3.3 Laser Displacement Sensor 64
3.3.4 Data Acquisition System 66
3.4 Calibration of Devices 67
3.4.1 Calibration of Shaking Table System 67
3.4.2 Calibration of Accelerometers 71
3.5 Setups of Testing Models 72
3.5.1 Large Laminar Shear Box Test (LLSBT) 72
3.5.2 Small Chamber Test with Positive
Air Pressure (SCT) 77
3.5.3 Small Sample Test with Suction (SSTS) 79
3.6 Testing Parameters 81
3.7 Concluding Remarks 83
4.0 DATA PROCESSING 84
4.1 Introduction 84
4.2 Flowchart in Data Processing 84
4.3 Data Processing Methods 85
4.4 Concluding Remarks 97
5.0 RESULT AND DISCUSSION 98
5.1 Introduction 98
5.2 Physical Properties of Soils 99
5.3 Analysis of Experimental Data 100
5.3.1 Analysis of Large Laminar Shear Box Test
(LLSBT) 100
5.3.2 Analysis of Small Chamber Test with
Positive Air Pressure (SCT) 110
5.3.3 Analysis of Small Sample Test with Suction
(SSTS) 112
5.3.4 Summarizing the Results of
Three Laboratory Setups 115
5.4 Dynamic Properties of Tropical Residual Soils 116
5.4.1 Relationships between Secant Shear Modulus and
Shear Strain Amplitude 117
5.4.2 Comparison of Present Data with
Previous Findings of Residual Soils 123
5.4.3 Effect of Plasticity Index and Confining Pressure
on Shear Modulus 127
5.4.4 Relationship between Damping Ratio and
Shear Strain Amplitude 132
5.5 Concluding Remarks 136
x
6.0 CONCLUSION 139
6.1 Summary 139
6.2 Conclusions 139
6.3 Recommendation 142
REFERENCES 144
LIST OF PUBLICATION 148

xi
LIST OF TABLES
Table
2.1
2.2
Constants for Equation 2.8
Confining Pressures and Strain Ranges Reported in
Previous 1g Shaking Table Tests
Page
30
45
3.1 Calibration of Accelerometers
72
3.2 Testing Parameters
82
3.3 Input Motions for Large Laminar Shear Box Test
82
3.4 Input Motions for Small Sample Tests
83
5.1 Physical Properties of Soils
99
5.2 Advantages and Shortcomings of the Three Setups
116
xii
LIST OF FIGURES
Figures
1.1
Research Framework
Page
6
2.1 Sumatran Faults and Subduction of the Indian-
Australian Plate into the Eurasian Plate (Balendra
et al., 2001)
11
2.2 Distribution of Tropical Residual Soils in Malaysia
(after Ooi, 1982)
14
2.3 Single-Cycle Hysteresis Loop (Brennan et al.,
2005)
15
2.4 Normalised Shear Modulus for Sandy Soil (after
Oztoprak and Bolton, 2013)
19
2.5 Hyperbolic Best-Fit Curves for Sandy Soils (after
Oztoprak and Bolton, 2013)
20
2.6 Effect of Confining Pressure on Toyoura Sand
(after Oztoprak and Bolton, 2013)
21
2.7 Effect of Confining Pressure on Sand (Kokushu,
2004)
21
2.8 Normalised Shear Modulus Relationship for Silts
and Clays (Vardanega and Bolton, 2013)
23
2.9 Degradation Curves for Fine-grained Soils with
Static and Dynamic Adjustments (after Vardanega
and Bolton, 2013)
25
2.10 Influence of Vertical Effective Confining Pressure
on Damping Ratio of Saturated Sand (Seed and
Idriss, 1970)
26
2.11 Stress State of Hollow Cylinder Specimen (Xu et
al., 2013)
28
2.12 Relationship between Shear Modulus and Shear
Strain Amplitude for a Clean Dry Sand (Hardin
and Drnevich, 1972)
29
xiii
2.13 Degradation Curves for Dense Sand with different
Confining Pressures (Kokushu, 1980)
31
2.14 Degradation Curves for Dense Sand with different
Void Ratios (Kokushu, 1980)
32
2.15 Comparison of Singapore Jurong Formation Soils
and Degradation Curves by Seed and Idriss (1970)
(Leong et al., 2003)
33
2.16 Comparison of Singapore Jurong Formation Soils
and Piedmont Residual Soils (Leong et al., 2003)
34
2.17 Damping Ratio Relationship for Singapore
Residual Soils (Leong et al., 2003)
34
2.18 Best-Fit Stiffness Degradation Curves (Leong et
al., 2003)
35
2.19 Cyclic Triaxial Test Results for Singapore Tropical
Residual Soils (after Tou, 2003)
36
2.20 Comparison of Malaysia Tropical Residual Soil
and Singapore Residual Soils (Tanaka and Lee,
2016)
37
2.21 Stress Condition and Deformation in Direct
Simple Shear Test (Dyvik et al., 1987)
38
2.22 NGI Direct Simple Shear Device (Dyvik et al.,
1987)
38
2.23 Schematic Diagram of Double Specimens Direct
Simple Shear Device (Lanzo et al., 1997)
39
2.24 A Sample of Hysteresis Loop of Double
Specimens Direct Simple Shear Device (Lanzo et
al., 1997)
40
2.25 Shear Container in Shaking Table Test: (a)
Equivalent Shear Beam Container, (b) Laminar
Shear Box (after Dietz and Wood, 2007; Ueng et
al., 2007)
41
2.26 A Typical Hysteresis Loop of Soft Clay (Kazama
and Yanagisawa, 1996)
43
2.27 Acceleration and Displacement below Ground
Surface (Kazama et al., 1996)
43
xiv
2.28 Acceleration, Velocity, and Displacement Traces
during the 1999 Chi-Chi, Taiwan Earthquake (at
station TCU074)
46
2.29 Comparison of Displacements obtained from
Double Integration and GPS Measurement (after
Boore, 2001)
48
2.30 Least-Square Fitting of Velocity Record (Boore,
2001)
49
2.31 Displacement Response Spectra (Boore, 2005) 50
2.32 Acceleration and Displacement Records using the
Stable Baseline Correction (Chiu, 1997)
51
2.33 Unfiltered and Filtered Acceleration, Velocity, and
Displacement Records (Boore and Bommer, 2005)
52
2.34 Fourier Acceleration Spectrum of Unfiltered and
Filtered Acceleration Records (Boore and
Bommer, 2005)
53
3.1 Locations of Soil Sampling Sites 58
3.2 Shaking Table System 60
3.3 Signal and Power Supply Flow Diagram 61
3.4 ESA Driver Unit 61
3.5 D/A Device 61
3.6 Graphical User Interface of MOTCTLPROG 62
3.7a Accelerometer attached on Soil Surface 63
3.7b Accelerometer attached on Metal Surface 64
3.8 Laser Displacement Sensor Head (CD5-85) 64
3.9 Amplifier 65
3.10 Interface of Sensor Navigation 65
3.11 Schematic Diagram of Data Acquisition 66
3.12 TML Data Logger (TML DRA-30A) 67
3.13 Result of Trial Tests for the Shaking Table System 68
xv
3.14 Relationships between Measured and Input
Frequencies
69
3.15 Relationships between Measured and Input
Displacements
70
3.16 Relationships between Peak Acceleration and
Input Displacement
71
3.17 Schematic Diagram of LLSBT 73
3.18 Experimental Setup for LLSBT 73
3.19 Sliding Joints on Aluminium Laminar Shear
Stacks
74
3.20 Aluminium Shear Box and Rubber Membrane 75
3.21 Compaction of Soil Layer 75
3.22 Soil Contained in Laminar Shear Box 76
3.23 Accelerometers in Soil Sample 77
3.24 Setup of SCT 78
3.25 Compacted Soil Sample 79
3.26 Schematic Diagram and Photograph of SSTS 80
4.1 Flowchart in Data Processing 85
4.2 Acceleration Profiles under Different Shaking
Frequencies
86
4.3 Velocity Profile 88
4.4 Displacement Profile 89
4.5 Displacement Waveforms of Shaking Table using
Laser Displacement Sensor
92
4.6 Fourier Amplitude Spectra of Actual Shaking
Table Displacement Movement
93
4.7 Comparison of Two Baseline Correction Schemes
and Laser Displacement Measurement (6Hz @ 2
mm)
94
xvi
4.8 Fourier Amplitude Spectra of Shaking Table
Record for the Motion of Laser Sensor Mounting
System, Ground Motion, Pre-event, and Post-event
Mean Motions (6Hz @ 2 mm)
96
5.1 Filtered Acceleration Profiles along the Height of
Soil Model
101-102
5.2 Filtered Displacement Profiles along the Height of
Soil Model
103-104
5.3 Displacement Profiles at Different Elevations 106
5.4 Comparison of Displacement Profiles between
Elevations of 3.5 cm and 10.5 cm
106
5.5 Shear Strain Profiles along Different Elevation
Intervals of Soil Model
107-108
5.6 Shear Stress Profile on the Top Surface at the
Elevation 10.5 cm
109
5.7 Hysteresis Loop for LLSBT 110
5.8 Shear Strain Profile for SCT 111
5.9 Shear Stress Profile for SCT 112
5.10 Hysteresis Loop for SCT 112
5.11 Shear Strain Profile for SSTS 113
5.12 Shear Stress Profile for SSTS 114
5.13 Hysteresis Loop for SSTS 115
5.14 Degradation Curves for Soil A (Sandy Clay) 119
5.15 Degradation Curves for Soil B (Sandy Silt) 120
5.16 Degradation Curves for Soil C (Silty Sand) 122
5.17 Results of Shear Modulus for Various Types of
Residual Soil
125
5.18 Effect of Confining Pressure on Shear Modulus for
Sandy Soil (Oztoprak and Bolton, 2013)
127
5.19 Effect of Plasticity Index on Shear Modulus for
Clayey Soil (Vardanega and Bolton, 2013)
128
xvii
5.20 Effect of Plasticity Index on Shear Modulus for
Soil A and Soil B
129
5.21 Effect of Confining Pressure on Shear Modulus
(Soil C)
130
5.22 Effect of Confining Pressure on Shear Modulus
(Soil A)
131
5.23 Effect of Confining Pressure on Shear Modulus
(Soil B)
132
5.24 Relationship between Damping Ratio and Shear
Strain Amplitude in LLSBT
135
5.25 Relationship between Damping Ratio and Shear
Strain Amplitude in SCT
135
5.26 Relationship between Damping Ratio and Shear
Strain Amplitude for Saturated Sand (Brennan et
al., 2005)
136
xx
LIST OF SYMBOLS/ ABBREVIATIONS
ia Acceleration at arbitrary soil interface, m/s2
na Acceleration at nth
soil interface, m/s2
1na Acceleration at (n+1)th
soil interface, m/s2
a(t) Acceleration at arbitrary time, s
at+ Δt Acceleration at time t + Δt, m/s2
t Arbitrary time instant, s
at Acceleration at time t, m/s2
∫τ d Area of hysteresis loop, kPa
i Bulk density of soil layer, kg/m3
D Damping ratio, %
Hi Depth of soil layer, m
Dt+ Δt Displacement at time t + Δt, m
Dt Displacement at time t, m
0 Effective confining pressure, MPa
)(z Inertia shear stress at arbitrary depth, Pa
Gmax Maximum shear modulus, MPa
PI Plasticity index, %
G Secant shear modulus, MPa
Δτ Shear stress range, kPa
Δ Shear strain range
Shear strain amplitude, %
τ(t) Shear stress, Pa

xxi
Δt Time interval, s
e Void ratio
vt+ Δt Velocity at time t + Δt, m/s
vt Velocity at time t, m/s
GUI Graphical user interface
D/A Digital-to-analog
FAS Fourier amplitude spectrum
JF Jurong formation
LLSBT Large laminar shear box test
1g Single gravitational
SCT Small sample test with positive air pressure
SSTS Small sample test with suction
CHAPTER 1
INTRODUCTION
1.1 Background Study
Peninsular Malaysia is seismically affected by the far-field tremors and
earthquakes from neighbouring countries like Indonesia and Philippines. Some
of the notable earthquake incidents in the Southeast Asia region include the
2004 Aceh earthquake, the 2005 Nias earthquake, the 2000 Bengkulu
earthquake, the 2015 Sabah earthquake, etc. (Balendra, 2008). The
occurrences of seismic activities in Malaysia have attracted an increasing
attention from the public and authorities. Many studies pertaining to the
impact of earthquake focused on structural stability of buildings through
experimental testing or numerical simulation (Adnan and Suradi, 2008; Nazri
and Alexander, 2012). Studies on the soil dynamic and geotechnical
earthquake engineering are still very limited in Malaysia. This area of research
needs to be carried out progressively to enrich the database of dynamic
properties of soils in Malaysia.
In general, soil can be grouped into transported soil and residual soil.
The formation of soils largely depends on the topography, climate, and nature
of the parent rock. Residual soils are formed from rock (i.e. igneous,
metamorphic, and sedimentary) or accumulation of organic material and

2
remain at the place where they are formed (Huat et al., 2004). Malaysia, being
a tropical country with warm and humid climates, has abundant tropical
residual soils which are formed through intense physical and chemical
weathering processes. Intense rainfall, high humidity and temperature have
contributed to a thick residual soil deposit in the country (Huat et al., 2004).
Their physical properties are prominent criteria to be considered by engineers
during the design and planning stages of various engineering construction
works.
Extensive studies on the hydraulic properties, compressibility,
stiffness, and shear strength properties of residual soils can be easily traced
from the current available literature (Huat et al., 2004; Rahardjo et al., 2004;
Rahardjo et al., 2005). Several studies on dynamic behaviour of residual soils
have also been reported from different parts of the world (Borden et al., 1996;
Leong et al., 2003; Tanaka and Lee, 2016). However, studies on dynamic
behaviour of tropical residual soils in Malaysia are still very limited (Tanaka
and Lee, 2016).
Hardin and Black (1968) reported a number of factors that may
influence the shear modulus and damping ratio of soils. Those factors include
effective confining pressure (effective mean principal stress), void ratio,
degree of saturation, soil type, overconsolidation ratio, number of loading
cycles, shear strength parameters, and shear strain amplitude. The effects of
plasticity index and strain rate were found to be profound in fine-grained soils
(Vucetic and Dobry, 1991; Vardanega and Bolton, 2013). Statistical analyses
3
were carried out to form a relationship between shear modulus and shear strain
amplitude (Oztoprak and Bolton, 2013; Vardanega and Bolton, 2013). Various
types of soil dynamic laboratory tests can be used to investigate the dynamic
behaviour of soils. Among the tests include hollow cylinder simple shear test,
resonant column test, simple shear test, and shaking table test. Shaking table
test was widely used to investigate the problem of liquefaction and
deformation behaviour of soil models under a series of predesignated cyclic
motions (Kazama et al., 1996; Kazama and Yanagisawa, 1996).
Signal processing is required to process the acceleration records from
an earthquake event or a dynamic test. Baseline correction and digital filtering
techniques are among the popular approaches adopted to remove the low and
high-frequency noises from an actual signal (Boore and Bommer, 2005).
However, the integrated displacement data from an accelerometer is subjected
to uncertainties during the numerical integration process. Therefore, a direct
displacement measurement technique can be attempted as a reference when
processing the measured acceleration records.
1.2 Problem Statement
Malaysia is seismically threatened by the far-field earthquakes from
neighbouring countries and the near-field earthquakes as a result of localised
internal faults. The transmission of seismic waves through ground to the
building can have adverse effects on the superstructures. However, studies on
the response of soil to the seismic action have not been well studied in
Malaysia.

4
Previous studies on soil dynamics focused primarily on sandy and
clayey materials. However, residual soils which are the products of intensive
in-situ weathering of parent rocks cover more than three-quarters of the land
area in Peninsular Malaysia (Taha et al., 2000). The dynamic behaviour of
these residual soils which are complicated by their sand-clay mixture and
unsaturated state has yet been explored.
In a shaking table test, accelerometers are normally used to measure
the change of acceleration over time. Under normal data processing practices,
the acceleration data is adjusted and numerically integrated to obtain the linear
displacement data. However, the accuracy and reliability of the computed
displacement data and the adopted adjustment technique often raise
arguments.
1.3 Aim and Objectives
The aim of the present research is to investigate the dynamic properties of
selected tropical residual soils in Malaysia. Three objectives are set to achieve
the research aim:
i. To evaluate the performance of three different laboratory setups on a
1g shaking table for soil dynamic testing.
ii. To recommend the most suitable method of signal processing for the
shaking table test performed in this particular study.
5
iii. To investigate the dynamic properties of selected residual soils in
Malaysia.
1.4 Research Framework
The main objectives of this study are to determine the dynamic properties of
selected tropical residual soils in Malaysia and to examine the performance of
three different 1g shaking table test setups in laboratory. The main reasons of
selecting the shaking table test to investigate the dynamic behaviour of
tropical residual soils in the present study include (1) the shaking table test is
capable of reproducing simple shear deformations of a soil model. The
mechanism, which produces mechanical energy from the base towards the soil model,
can facilitate the understanding of soil deformation behaviour under a close-to-actual
seismic action; (2) the shaking table apparatus is readily available in the
geotechnical laboratory of author’s institution. To achieve the objectives, three
stages of research activities were undertaken, i.e. background study stage,
experimental stage, and data analysis stage. A research framework is
systematically laid out in Figure 1.1. The framework outlines all important
components of the study.
In the background study stage, state-of-the-art researches with regard
to soil dynamics and tropical residual soils are reviewed. Research gaps are
identified by critically examining the existing literature. From the identified
research gaps, three research objectives are formulated.

6
Prior to the main laboratory tests, soils are collected from three
sampling sites in Peninsular Malaysia. The soil samples are subjected to a
series of standard soil physical tests. There are three types of laboratory
setups used to investigate the dynamic properties of soils on a 1g shaking
table, i.e. large laminar shear box test (LLSBT), small chamber test with
positive air pressure (SCT), and small sample test with suction (SSTS). The
instrumentation devices for each setup are calibrated and the soil samples are
compacted in accordance with the volume required for each setup.
In the data analysis stage, the raw experimental data are compiled and
processed before they are used for further analysis. The analysed results are
interpreted and compared with the findings from the previous studies. Lastly,
the methodology of research, data interpretation, experimental findings, and
limitations of the experiment are reported in detail in the present thesis.
Figure 1.1: Research Framework
• Reviewing literature
• Identifying research gaps
Background Study Stage
• Soil physical tests
• Calibration of experimental & instrumentation devices
• Main laboratory tests: LLSBT, SCT, and SSTS
Experimental Stage
• Compilation and processing of the experimental data
Data Analysis Stage
7
1.5 Scope of Study
This study focuses on investigating the dynamic behaviours of selected soils in
Peninsular Malaysia using three different experimental setups tested on a 1g
shaking table. A sand mining trail (i.e. Silty Sand) and two selected tropical
residual soils (i.e. Sandy Clay and Sandy Silt) are adopted and tested on a 1g
shaking table by using three laboratory setups, namely large laminar shear box
test (LLSBT), small chamber test with positive air pressure (SCT), and small
sample test with suction (SSTS). The present experimental setups can
facilitate studies of medium-large shear strain dynamic properties of soil only.
Investigation of small-strain dynamic properties is not feasible owing to the
limitation of the laboratory setups. Each of the soil models is instrumented
with accelerometers for acceleration measurement and laser displacement
sensor for verification purposes. The dynamic properties of the soil are
interpreted from the experimental data and compared with the established
results from literature.
1.6 Structure of Thesis
This thesis is divided into six main chapters: Introduction (Chapter 1),
Literature Review (Chapter 2), Methodology (Chapter 3), Data Processing
(Chapter 4), Result and Discussion (Chapter 5), and Conclusion and
Recommendation (Chapter 6). Introductory note and concluding remark are
provided in each chapter to highlight the importance as well as to summarize
the chapter systematically.
8
Chapter 1 introduces the background study pertaining to the present
research. Problem statement, research aims, and objectives are clearly
formulated. Last but not least, the scope and limitation of the study is outlined.
Chapter 2 provides a literature review on the topics relevant to the
present research. This chapter begins with the formation and characteristics of
tropical residual soils as well as the occurrence of earthquakes in Malaysia.
Subsequently, studies of experimental soil dynamic behaviour reported by
numerous authors are critically reviewed.
Chapter 3 highlights the methodology of the three main laboratory
setups tested on a 1g shaking table, namely large laminar shear box test
(LLSBT), small chamber test with positive air pressure (SCT), and small
sample test with suction (SSTS). The physical properties of sampled soils and
preparation of the soil sample in each test are described in detail. In addition,
data acquisition system and calibration of instrumentation devices are
included.
Chapter 4 describes different approaches of data processing used to
process the measured acceleration data. Baseline correction and digital
filtering methods are used to recover the signal from low-frequency and high-
frequency noises. The acceleration data is adjusted and numerically integrated
to obtain corrected acceleration, velocity, and displacement data. A laser
displacement sensor is used as a reference when selecting an appropriate data
processing method in this particular study.

9
Chapter 5 discusses the results and findings obtained from the
experiments. The results of shear moduli and damping ratio of the three
selected soils are presented. Experimental data points are compared with the
established relationships reported from the established literature. Besides, the
influencing parameters of the soil dynamic properties are examined in detail.
Chapter 6 presents the conclusions drawn from the present study and
provides a list of recommendations for further improvement.
CHAPTER 2
LITERATURE REVIEW
2.1 Introduction
This chapter provides a review on the dynamic behaviour of soils (i.e. sand
and clay) obtained from different laboratory testing setups. Factors affecting
dynamic properties of soil are reported. The characteristics of tropical residual
soils and the occurrence of earthquakes in Malaysia are reviewed. In addition,
important aspects of signal processing and ground motion parameters are
studied.
2.2 Seismic Activities in Malaysia
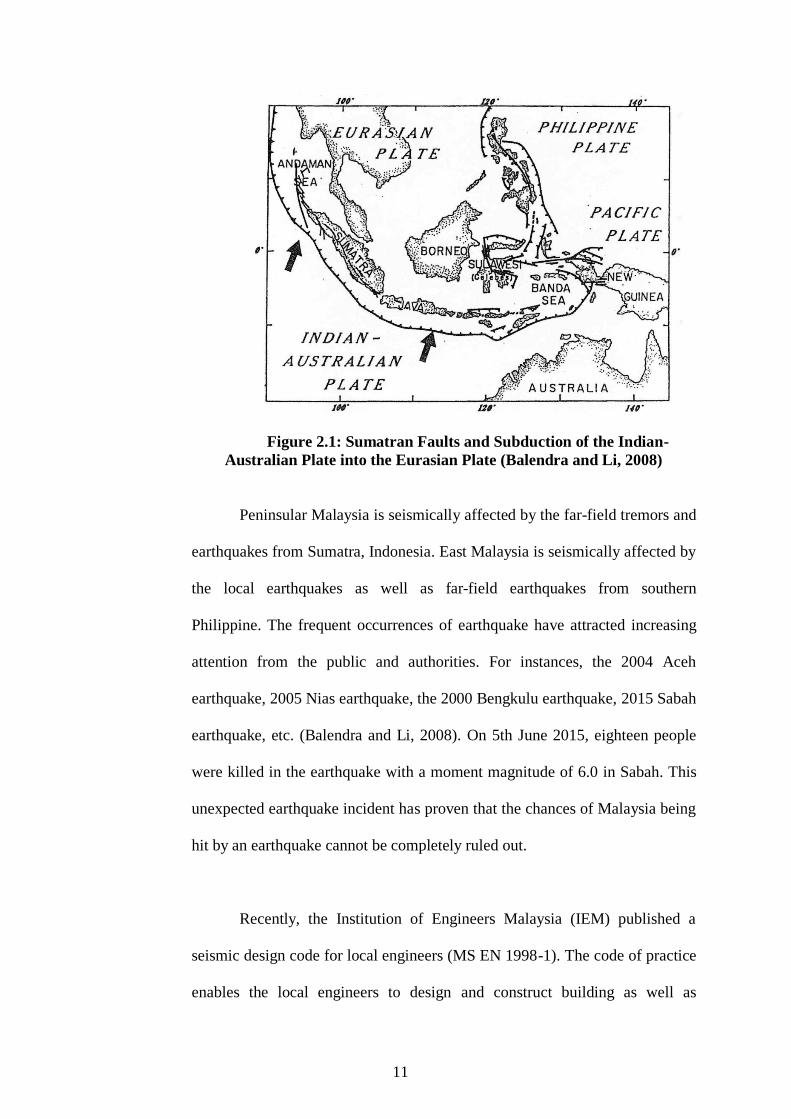
Malaysia is situated on the southern edge of the Eurasian plate which is in the
vicinity of two active plate boundaries, namely the inter-plate boundary
between Indo-Australian and Eurasian plates as well as the inter-plate
boundary between Eurasian and Philippine plates (Mohd Rosaidi, 2001).
Figure 2.1 shows the Sumatran faults and subduction zone of the Indian-
Australian plate into Eurasian plate. Peninsular Malaysia (west part of
Malaysia) is located at the seismically stable part of the Eurasian plate while
East Malaysia is located at the moderately active zone (Balendra and Li, 2008;
Mohd Rosaidi, 2001).
11
Figure 2.1: Sumatran Faults and Subduction of the Indian-
Australian Plate into the Eurasian Plate (Balendra and Li, 2008)
Peninsular Malaysia is seismically affected by the far-field tremors and
earthquakes from Sumatra, Indonesia. East Malaysia is seismically affected by
the local earthquakes as well as far-field earthquakes from southern
Philippine. The frequent occurrences of earthquake have attracted increasing
attention from the public and authorities. For instances, the 2004 Aceh
earthquake, 2005 Nias earthquake, the 2000 Bengkulu earthquake, 2015 Sabah
earthquake, etc. (Balendra and Li, 2008). On 5th June 2015, eighteen people
were killed in the earthquake with a moment magnitude of 6.0 in Sabah. This
unexpected earthquake incident has proven that the chances of Malaysia being
hit by an earthquake cannot be completely ruled out.
Recently, the Institution of Engineers Malaysia (IEM) published a
seismic design code for local engineers (MS EN 1998-1). The code of practice
enables the local engineers to design and construct building as well as

12
geotechnical structures with an adequate earthquake resistance. Besides, many
researchers from different fields have contributed to earthquake engineering in
many facets, such as seismology, structural engineering, geotechnical
earthquake engineering, etc. (Mohd Rosaidi, 2001; Shakri and Sanjery, 2015;
Sooria et al., 2012; Tanaka and Lee, 2016). Despite of the significant emphasis
put on earthquake engineering, the dynamic behaviour of soil in Malaysia still
has yet been well explored. Very limited studies have been carried out on the
geotechnical and earthquake engineering.
2.3 Tropical Residual Soils in Malaysia
In general, soil is an unconsolidated natural material and can be grouped into
transported soil and residual soil. The formation of soils largely depends on
the topography, climate, and nature of parent rock (Huat et al., 2004). Residual
soils are formed from rock (i.e. igneous, metamorphic, and sedimentary) or
accumulation of organic material and remain at the place where they were
formed (McCarthy, 1993). In addition, the Public Works Institute of Malaysia
(1996) defines a tropical residual soil as a soil formed by the decomposition of
parent material and remains in situ under tropical weathering conditions (i.e.
high temperature and humidity). Residual soils are composed of sand-to-clay
mixture with varying percentages of fine content. Over the passage of time,
the coarse-grained soil particles (e.g. quartz) will be weathered and become
clay-sized particles gradually. Unsaturated residual soils are considerably
complex attributed to several reasons, namely the behaviours of unsaturated
soils are wildly different as the air content in the void changes, the strength of
unsaturated soils cannot be described by the effective stress strength or
13
undrained shear strength, the volume will change in undrained condition when
conducting a triaxial test, and so on (Atkinson, 2007).
Residual soils originated from various types of parent rocks can be
found in many countries, particularly in the tropical regions, such as Malaysia,
Singapore, South Africa, Ghana, and Nigeria. Malaysia is a tropical country
with warm and humid climates and has abundant tropical residual soils as the
products of physical and chemical weathering processes. High rainfall,
humidity, and temperature give rise to a thick residual soil deposit in which
the rate of weathering is higher than the regions with cold and dry climates
(Huat et al., 2004). Ooi (1982) reported a geological map (referred to Figure
2.2) for the distribution of soils in Peninsular Malaysia in which the residual
soils in Malaysia can be categorized into three types based on their parent rock
formations (i.e. igneous rock, sedimentary rock, and metamorphic rock).

14
Figure 2.2: Distribution of Tropical Residual Soils in Malaysia (after Ooi,
1982)
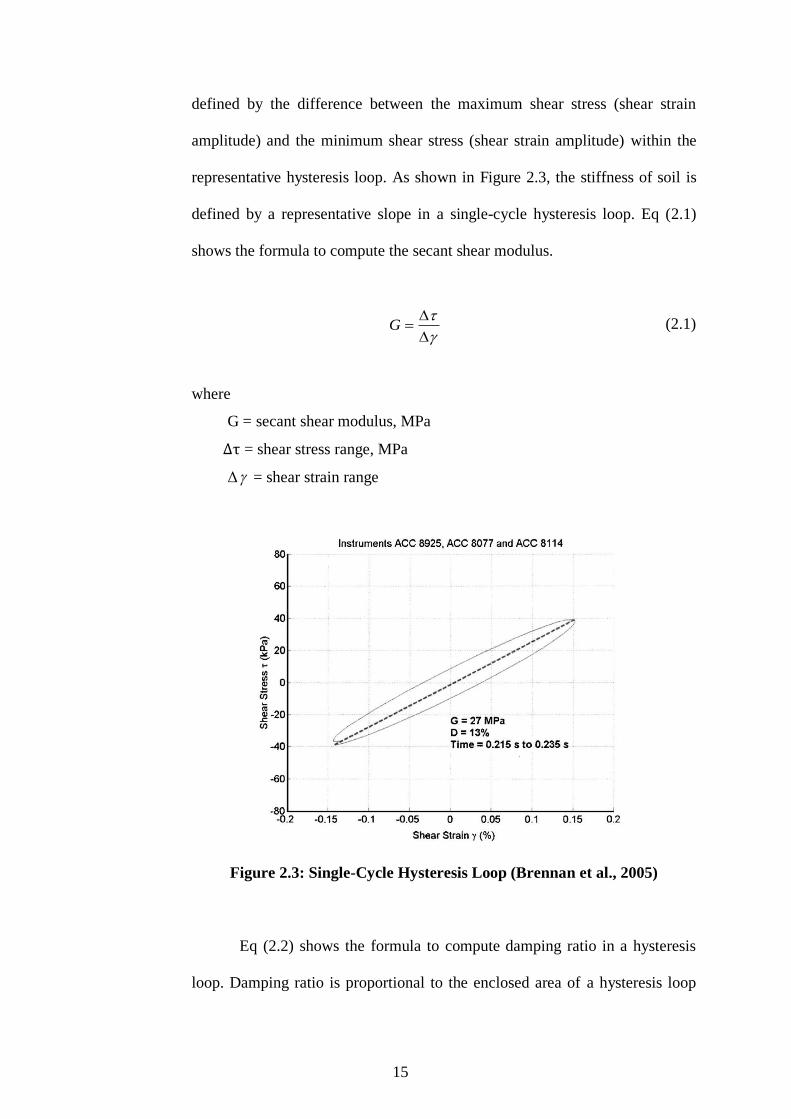
2.4 Secant Shear Modulus and Damping Ratio
Secant shear modulus (G) and damping ratio (D) are two important dynamic
properties of soil for understanding deformation behaviour of soil under cyclic
loadings and for carrying out dynamic analysis of geotechnical structures
(Kramer, 2013). Both of the parameters can be evaluated from a representative
hysteresis loop as shown in Figure 2.3. Brennan et al. (2005) reviewed the
approaches to compute secant shear modulus and damping ratio. By definition,
secant shear modulus within a cycle of hysteresis loop is the ratio of the shear
stress range to the shear strain range. The range of shear stress (shear strain) is
15
defined by the difference between the maximum shear stress (shear strain
amplitude) and the minimum shear stress (shear strain amplitude) within the
representative hysteresis loop. As shown in Figure 2.3, the stiffness of soil is
defined by a representative slope in a single-cycle hysteresis loop. Eq (2.1)
shows the formula to compute the secant shear modulus.
G (2.1)
where
G = secant shear modulus, MPa
Δτ = shear stress range, MPa
Δ = shear strain range
Figure 2.3: Single-Cycle Hysteresis Loop (Brennan et al., 2005)
Eq (2.2) shows the formula to compute damping ratio in a hysteresis
loop. Damping ratio is proportional to the enclosed area of a hysteresis loop

16
and the area of the loop can be calculated by using trapezoidal integration
method.
)25.0(2
1
dD (2.2)
where
D = damping ratio
Δτ = shear stress range, kPa
Δ = shear strain range
∫τ d = area of hysteresis loop, kPa
2.5 Shear Modulus Degradation Curves for Soils
Hardin and Black (1968) identified a number of factors that may influence the
shear modulus and damping ratio of soils. These factors included effective
confining pressure (effective mean principal stress), void ratio, degree of
saturation, soil type, overconsolidation ratio, number of loading cycles, shear
strength parameters, and shear strain amplitude. Besides, the effects of
plasticity index and strain rate were found to be profound in fine-grained soils
(Vucetic and Dobry, 1991; Vardanega and Bolton, 2013). Lanzo et al. (1997)
investigated the effects of some parameters on the dynamic behaviours of sand
and clay by using a double specimen direct simple shear (DSDSS) device.
Among the parameters were soil types, vertical effective consolidation stress,
overconsolidation ratio, void ratio, shear strain amplitude, and plasticity index.
17
Deformation properties of soils (i.e. stiffness) are characterized by
using degradation curves in which the relationships between shear modulus
and shear strain amplitude are formed. Degradation curves of soils ranging
from small, medium to large shear strain amplitudes have been investigated in
numerous studies (Hardin and Drnevich, 1972; Oztoprak and Bolton, 2013;
Vardanega and Bolton, 2013; Ishibashi and Zhang, 1993; Kokushu, 1980;
Seed and Idriss, 1970). The responses of soils at very small shear strain level
(as small as 0.001 %) are important for conducting vibration analysis on a
geotechnical structure and understanding the mechanism of wave propagation
through a soil mass. Dynamic properties covering a wide range of shear strain
amplitudes have to be determined to facilitate the study of soil behaviour in an
earthquake (Hardin and Drnevich, 1972).
Since Seed and Idriss (1970) published the first database of shear
modulus degradation curves for sand, many researches have suggested
numerous degradation curves covering a wide variety of soils. Recently, a
newly-developed database of shear modulus degradation curves for sandy as
well as clayey soils have been reported by some researchers (Oztoprak and
Bolton, 2013; Vardanega and Bolton, 2013). The construction of shear
modulus degradation curves involved statistical analysis on the database of
shear moduli from many tests published previously. It follows that the above-
mentioned database of degradation curves are suitable to be used to compare
with the laboratory results in the present study.

18
2.5.1 Shear Modulus Degradation Curves for Sandy Soils
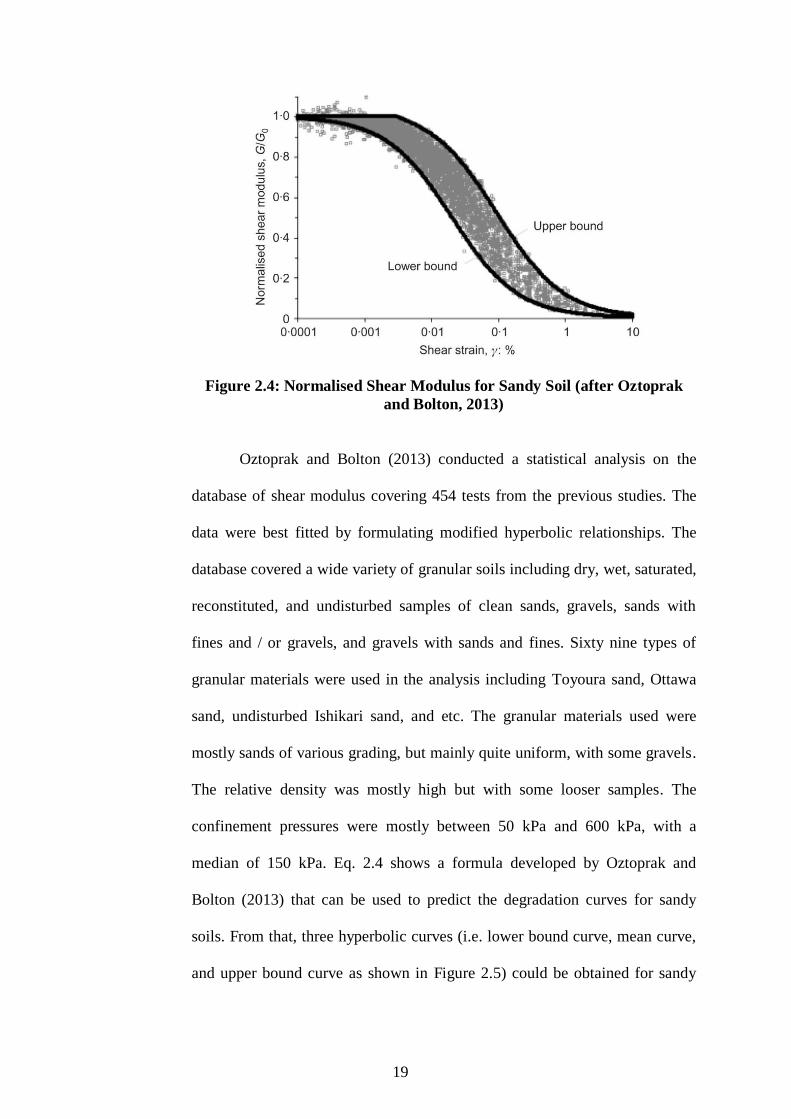
Figure 2.4 shows the shear modulus degradation curves for sandy soils
reported by Oztoprak and Bolton (2013). From the degradation curves, the
shear moduli attenuated with the increase of shear strain amplitudes. The
stiffness of soil (i.e. normalised secant shear modulus) was strain-dependant
and behaved non-linearly. The secant shear modulus at a very small shear
strain level gave rise to the maximum shear modulus (Gmax) in which linear
elastic behaviour of soil was expected. Hardin and Black (1968) reported an
empirical equation for computing the maximum shear modulus of coarse-
grained soils (Eq 2.3).
2
1
0
2
max1
)97.2(3230
e
eG
(2.3)
where
Gmax = maximum shear modulus, MPa
e = void ratio
0 = effective confining pressure, MPa
19
Figure 2.4: Normalised Shear Modulus for Sandy Soil (after Oztoprak
and Bolton, 2013)
Oztoprak and Bolton (2013) conducted a statistical analysis on the
database of shear modulus covering 454 tests from the previous studies. The
data were best fitted by formulating modified hyperbolic relationships. The
database covered a wide variety of granular soils including dry, wet, saturated,
reconstituted, and undisturbed samples of clean sands, gravels, sands with
fines and / or gravels, and gravels with sands and fines. Sixty nine types of
granular materials were used in the analysis including Toyoura sand, Ottawa
sand, undisturbed Ishikari sand, and etc. The granular materials used were
mostly sands of various grading, but mainly quite uniform, with some gravels.
The relative density was mostly high but with some looser samples. The
confinement pressures were mostly between 50 kPa and 600 kPa, with a
median of 150 kPa. Eq. 2.4 shows a formula developed by Oztoprak and
Bolton (2013) that can be used to predict the degradation curves for sandy
soils. From that, three hyperbolic curves (i.e. lower bound curve, mean curve,
and upper bound curve as shown in Figure 2.5) could be obtained for sandy
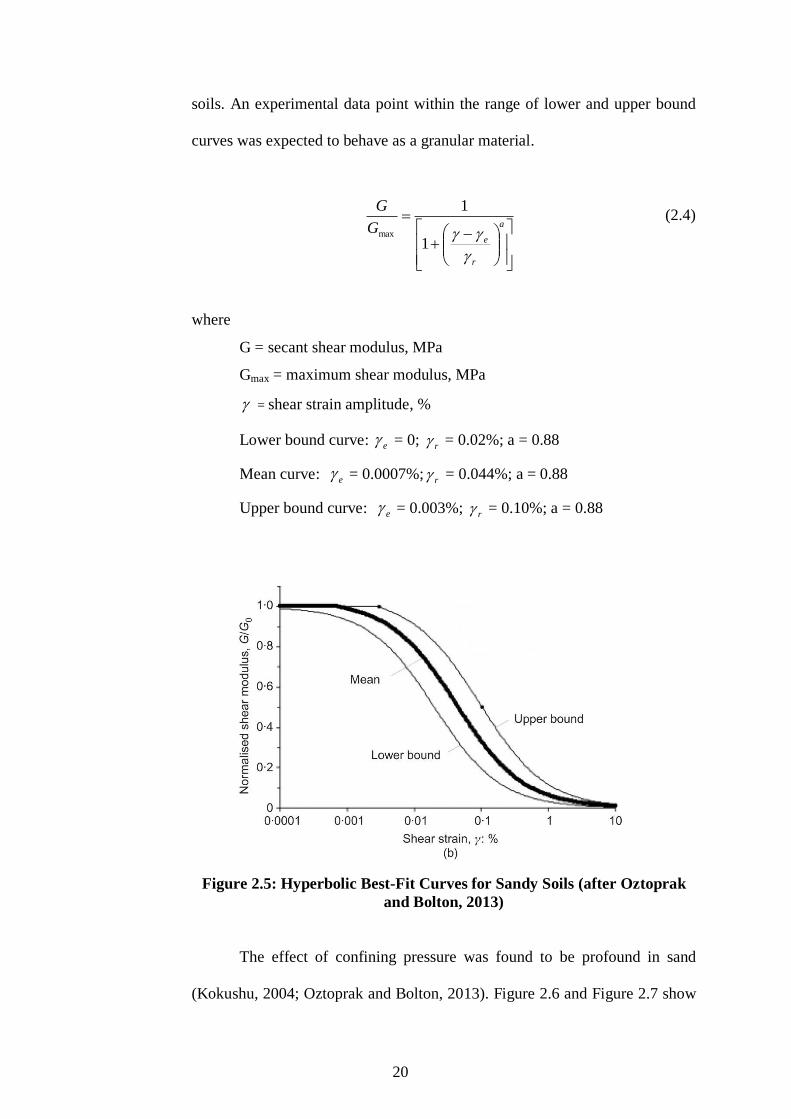
20
soils. An experimental data point within the range of lower and upper bound
curves was expected to behave as a granular material.
a
r
eG
G
1
1
max
(2.4)
where
G = secant shear modulus, MPa
Gmax = maximum shear modulus, MPa
= shear strain amplitude, %
Lower bound curve: e = 0; r = 0.02%; a = 0.88
Mean curve: e = 0.0007%; r = 0.044%; a = 0.88
Upper bound curve: e = 0.003%; r = 0.10%; a = 0.88
Figure 2.5: Hyperbolic Best-Fit Curves for Sandy Soils (after Oztoprak
and Bolton, 2013)
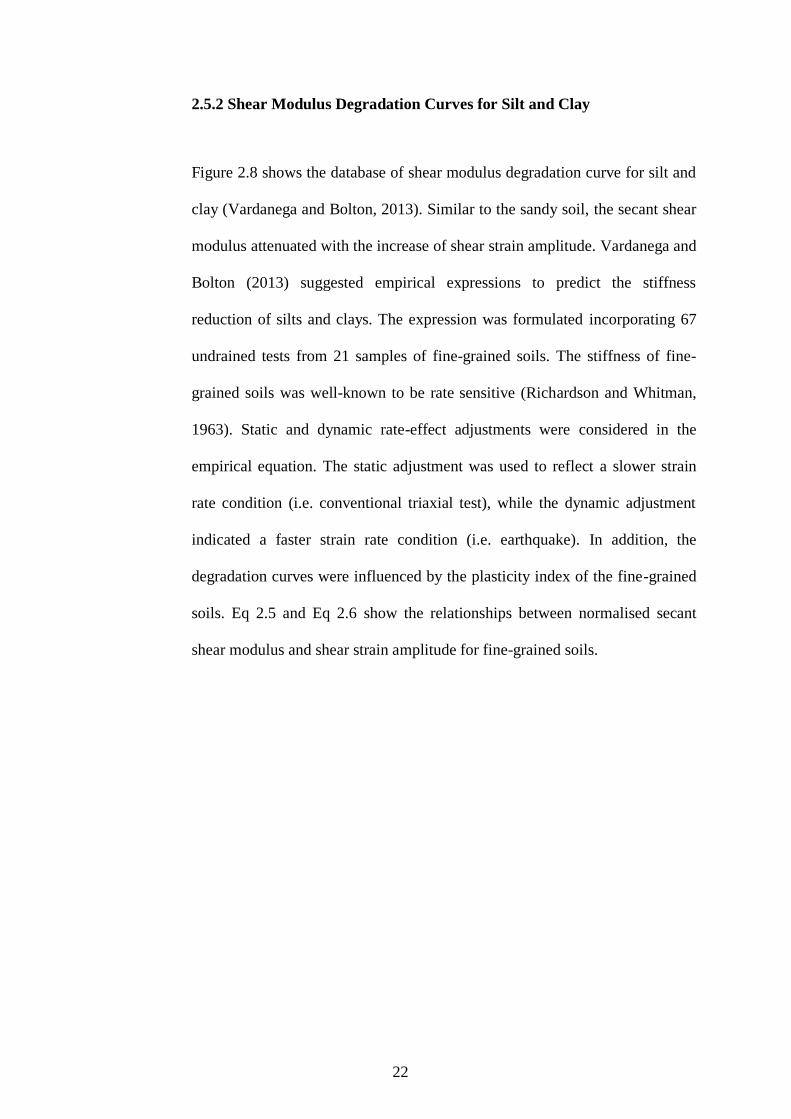
The effect of confining pressure was found to be profound in sand
(Kokushu, 2004; Oztoprak and Bolton, 2013). Figure 2.6 and Figure 2.7 show
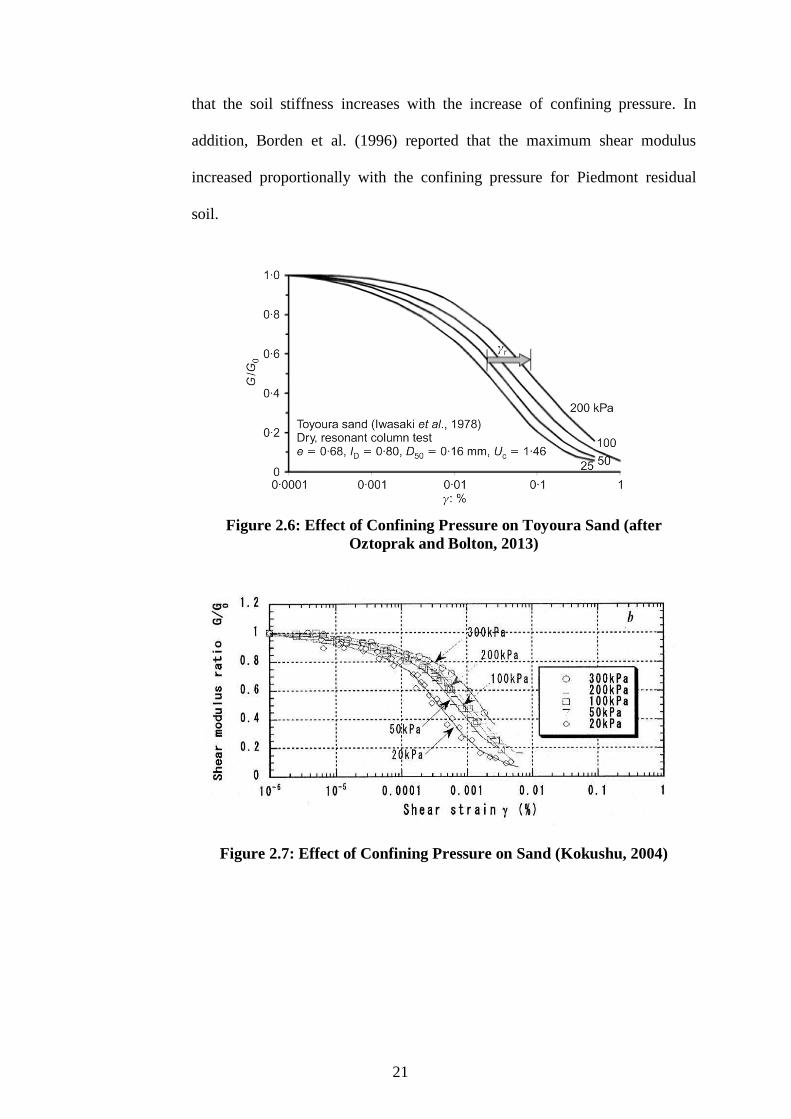
21
that the soil stiffness increases with the increase of confining pressure. In
addition, Borden et al. (1996) reported that the maximum shear modulus
increased proportionally with the confining pressure for Piedmont residual
soil.
Figure 2.6: Effect of Confining Pressure on Toyoura Sand (after
Oztoprak and Bolton, 2013)
Figure 2.7: Effect of Confining Pressure on Sand (Kokushu, 2004)
22
2.5.2 Shear Modulus Degradation Curves for Silt and Clay
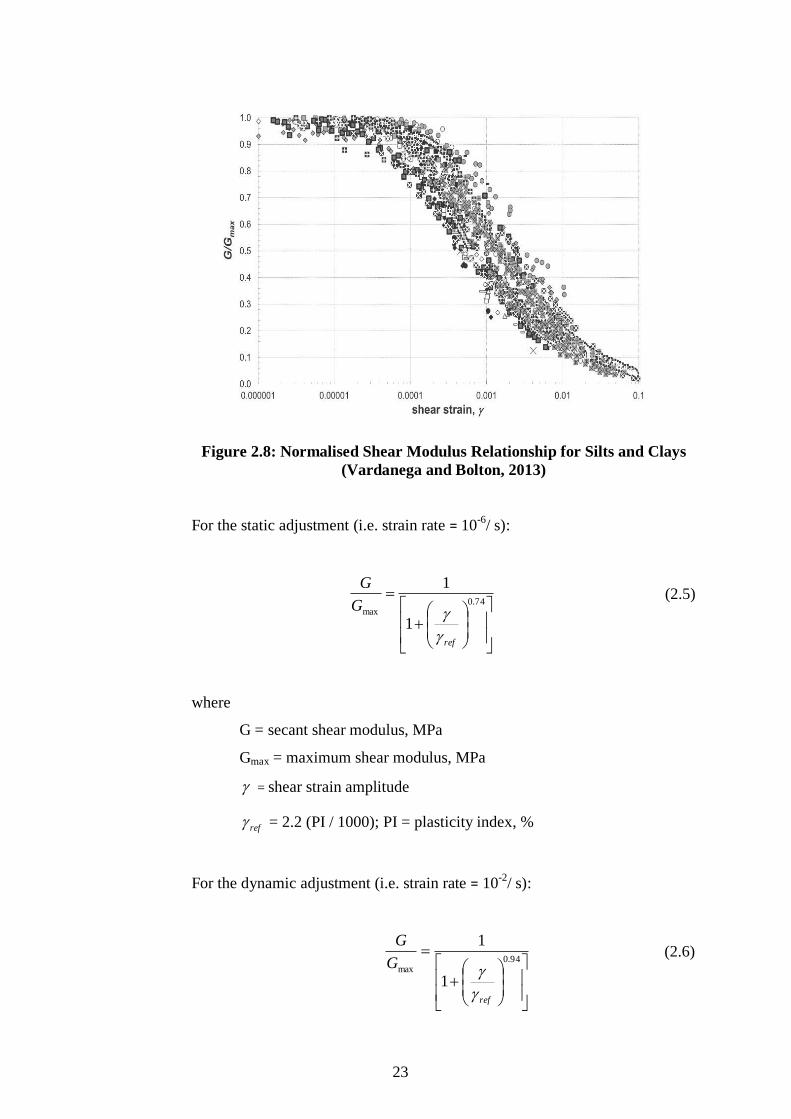
Figure 2.8 shows the database of shear modulus degradation curve for silt and
clay (Vardanega and Bolton, 2013). Similar to the sandy soil, the secant shear
modulus attenuated with the increase of shear strain amplitude. Vardanega and
Bolton (2013) suggested empirical expressions to predict the stiffness
reduction of silts and clays. The expression was formulated incorporating 67
undrained tests from 21 samples of fine-grained soils. The stiffness of fine-
grained soils was well-known to be rate sensitive (Richardson and Whitman,
1963). Static and dynamic rate-effect adjustments were considered in the
empirical equation. The static adjustment was used to reflect a slower strain
rate condition (i.e. conventional triaxial test), while the dynamic adjustment
indicated a faster strain rate condition (i.e. earthquake). In addition, the
degradation curves were influenced by the plasticity index of the fine-grained
soils. Eq 2.5 and Eq 2.6 show the relationships between normalised secant
shear modulus and shear strain amplitude for fine-grained soils.
23
Figure 2.8: Normalised Shear Modulus Relationship for Silts and Clays
(Vardanega and Bolton, 2013)
For the static adjustment (i.e. strain rate = 10-6
/ s):
74.0
max
1
1
ref
G
G
(2.5)
where
G = secant shear modulus, MPa
Gmax = maximum shear modulus, MPa
= shear strain amplitude
ref = 2.2 (PI / 1000); PI = plasticity index, %
For the dynamic adjustment (i.e. strain rate = 10-2
/ s):
94.0
max
1
1
ref
G
G
(2.6)
24
where
G = secant shear modulus, MPa
Gmax = maximum shear modulus, MPa
= shear strain amplitude
ref = 3.7 (PI / 1000); PI = plasticity index, %
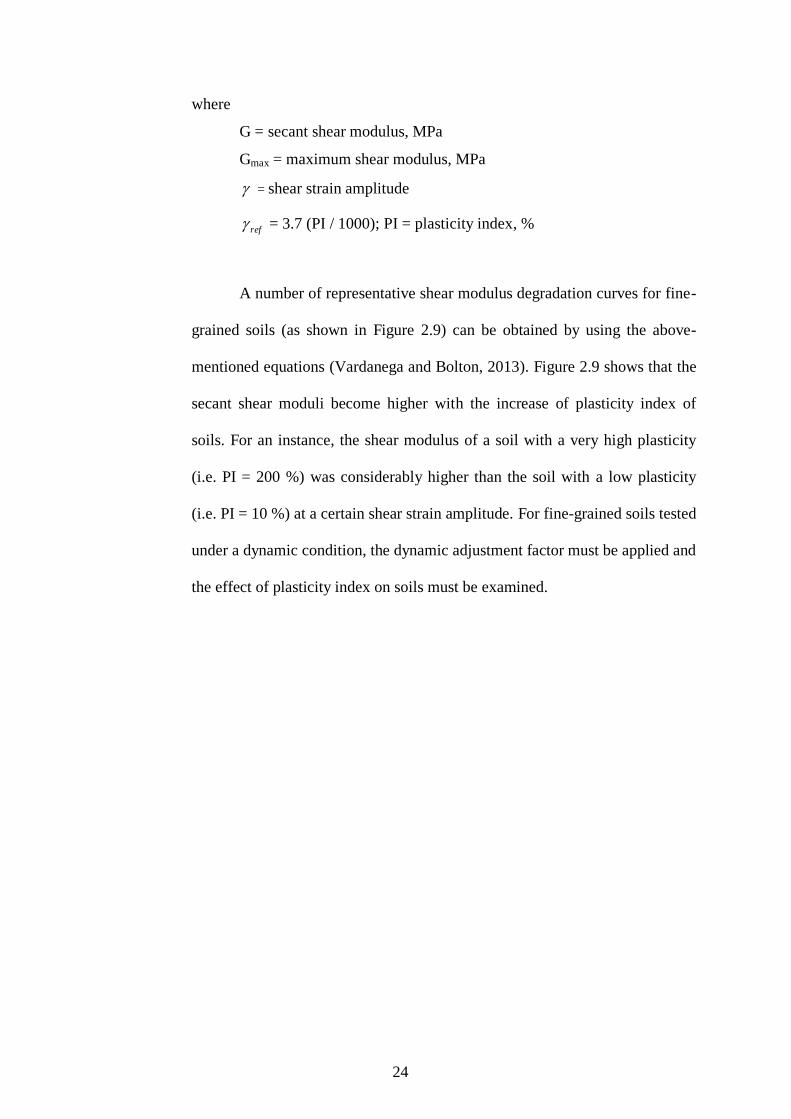
A number of representative shear modulus degradation curves for fine-
grained soils (as shown in Figure 2.9) can be obtained by using the above-
mentioned equations (Vardanega and Bolton, 2013). Figure 2.9 shows that the
secant shear moduli become higher with the increase of plasticity index of
soils. For an instance, the shear modulus of a soil with a very high plasticity
(i.e. PI = 200 %) was considerably higher than the soil with a low plasticity
(i.e. PI = 10 %) at a certain shear strain amplitude. For fine-grained soils tested
under a dynamic condition, the dynamic adjustment factor must be applied and
the effect of plasticity index on soils must be examined.
25
Figure 2.9: Degradation Curves for Fine-grained Soils with Static and
Dynamic Adjustments (Vardanega and Bolton, 2013)
2.6 Relationship between Damping Ratio and Shear Strain Amplitude
It is well accepted that damping ratio increases with the increase of shear
strain amplitude (Hardin and Drnevich, 1972; Ishibashi and Zhang, 1993; Seed
and Idriss, 1970). Figure 2.10 shows the relationship between damping ratio
and shear strain amplitude for a saturated sand (Seed and Idriss, 1970).

26
Besides, Hardin and Drnevich (1972) reported that vertical effective confining
pressure was the main factor influencing the damping ratio of sand. At a
certain shear strain amplitude, the damping ratio decreased as the confining
pressure increased. It was also found that void ratio and degree of saturation
were less influential on the damping ratio than the vertical effective pressure.
Figure 2.10: Influence of Vertical Effective Confining Pressure on
Damping Ratio of Saturated Sand (Seed and Idriss, 1970)
Hardin and Drnevich (1972) and Ishibashi and Zhang (1993) found
that damping ratio was a function of the normalised shear modulus (i.e. G/
Gmax). In addition, Ishibashi and Zhang (1993) provided a simple unified
formula relating shear modulus and damping ratio with the maximum shear
modulus, shear strain amplitude, mean effective confining stress, and plasticity
index. Eq 2.7 shows the simple relationship to formulate damping ratio curves
for a variety of soils.

27
1547.1586.02
)1(333.0
max
2
max
0145.0 3.1
G
G
G
GeD
PI
(2.7)
where
D = damping ratio, %
e = void ratio
PI = plasticity index, %
G = secant shear modulus, MPa
Gmax = maximum shear modulus, MPa
2.7 Laboratory Study on Dynamic Behaviour of Soil
There are various laboratory tests that can be used to investigate the dynamic
behaviours of soil, such as resonant column test, cyclic triaxial test, cyclic
direct simple shear test, cyclic torsional shear test, bender element test, and
shaking table test (Kramer, 2014). The dynamic properties measured by using
the above-mentioned tests are able to cover a wide range of shear strain
amplitudes. Seed and Idriss (1970) provided a list of approximate ranges of
shear strain amplitudes for laboratory tests and field tests, respectively.
2.7.1 Hollow Cylinder Simple Shear Test
Hollow cylinder simple shear device is normally used to investigate the soil
behaviours under shearing as well as the dynamic properties at a small strain
level (Hardin and Drnevich, 1972; Iwasaki et al., 1978; Wijewikreme and
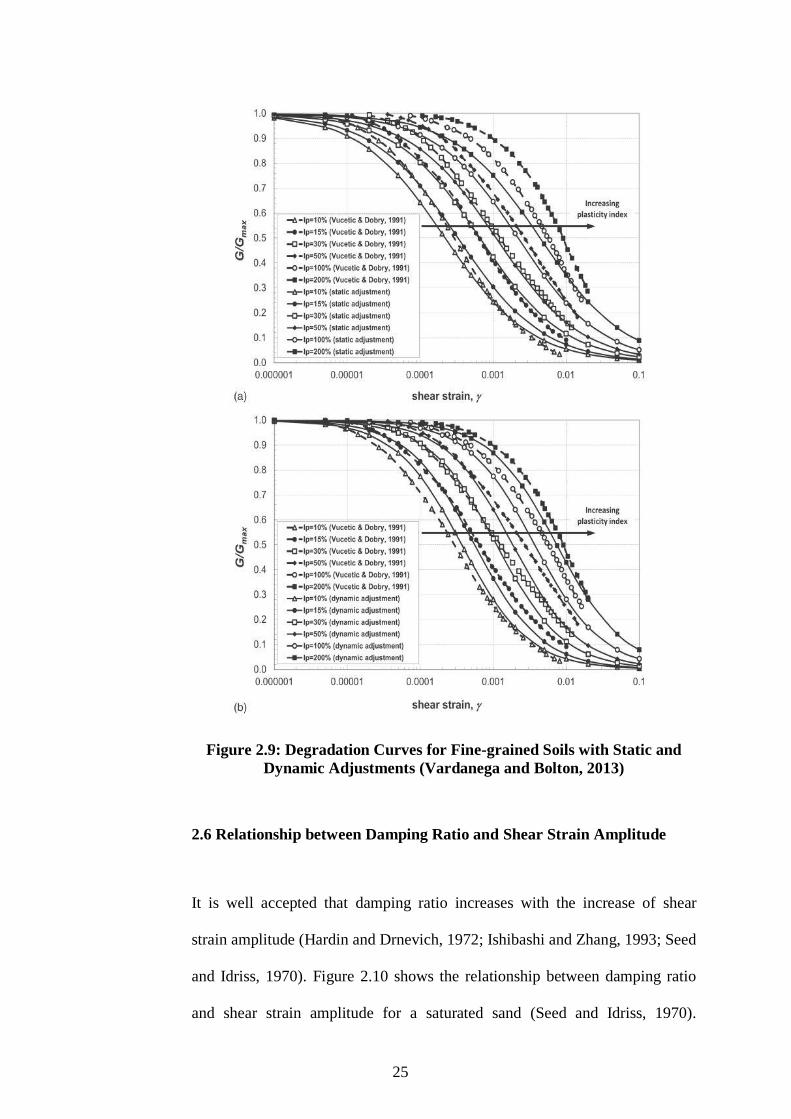
Vaid, 2008). Figure 2.11 shows a schematic diagram of the stress condition of
soil in a hollow cylinder simple shear test (Xu et al., 2013). One of the
28
advantages of using the hollow cylinder test is that the shear stress in the
circumferential direction can replicate the stress condition of soil having a
simple shear deformation throughout an infinite length. This kind of boundary
condition was difficult to be achieved in a conventional cyclic simple shear
device (Hardin and Drnevich, 1972). In addition, the torsional test allows
isotropic or anisotropic initial stress condition to be applied.
Figure 2.11: Stress State of Hollow Cylinder Specimen (Xu et al.,
2013)
Hardin and Drnevich (1972) conducted a hollow cylinder simple shear
test on a clean silica sand and an undisturbed cohesive soil at a small
frequency of loading (i.e. 1 / 12 Hz). The generated inertia force was similar to
that of a static test because of the low frequency of loading. In the same study,
shear strain amplitude, effective mean principal stress, and void ratio were
regarded as the main variables. It was realized that the shear modulus
increased with the effective mean principal stress, but decreased as the void
ratio became higher. At a small shear strain level, it varied with the square root
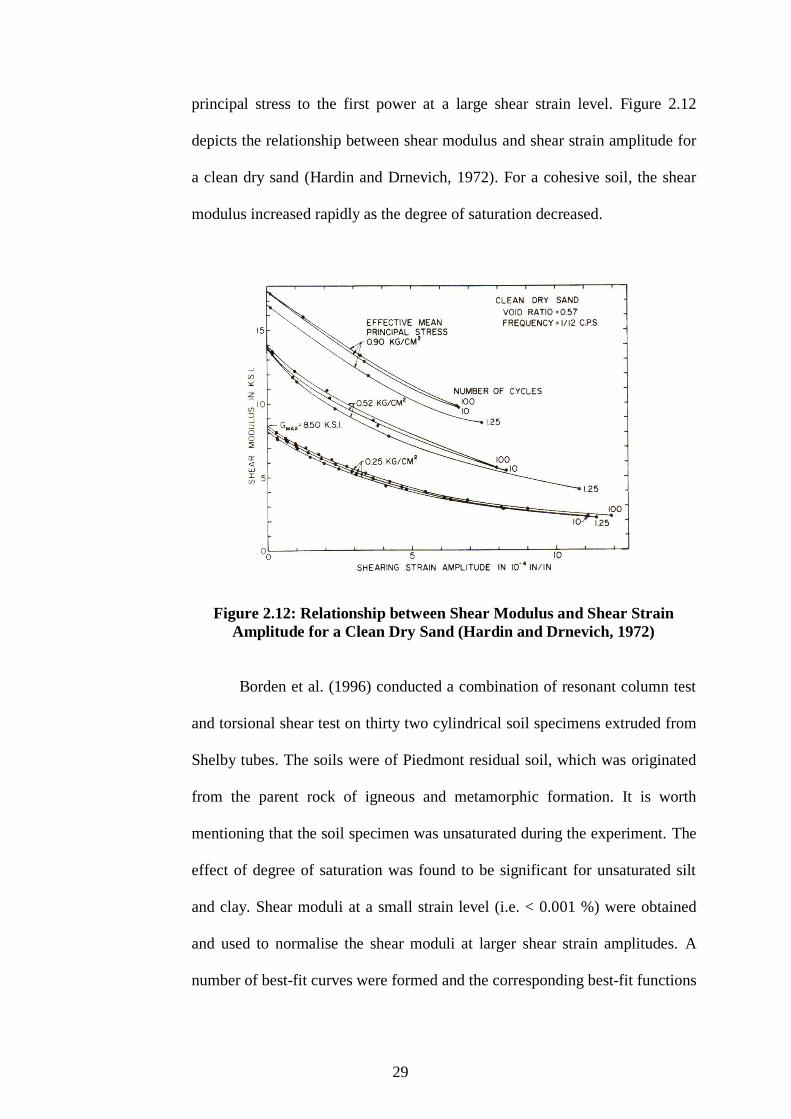
of the effective mean principal stress and became a function of effective mean
29
principal stress to the first power at a large shear strain level. Figure 2.12
depicts the relationship between shear modulus and shear strain amplitude for
a clean dry sand (Hardin and Drnevich, 1972). For a cohesive soil, the shear
modulus increased rapidly as the degree of saturation decreased.
Figure 2.12: Relationship between Shear Modulus and Shear Strain
Amplitude for a Clean Dry Sand (Hardin and Drnevich, 1972)
Borden et al. (1996) conducted a combination of resonant column test
and torsional shear test on thirty two cylindrical soil specimens extruded from
Shelby tubes. The soils were of Piedmont residual soil, which was originated
from the parent rock of igneous and metamorphic formation. It is worth
mentioning that the soil specimen was unsaturated during the experiment. The
effect of degree of saturation was found to be significant for unsaturated silt
and clay. Shear moduli at a small strain level (i.e. < 0.001 %) were obtained
and used to normalise the shear moduli at larger shear strain amplitudes. A
number of best-fit curves were formed and the corresponding best-fit functions
30
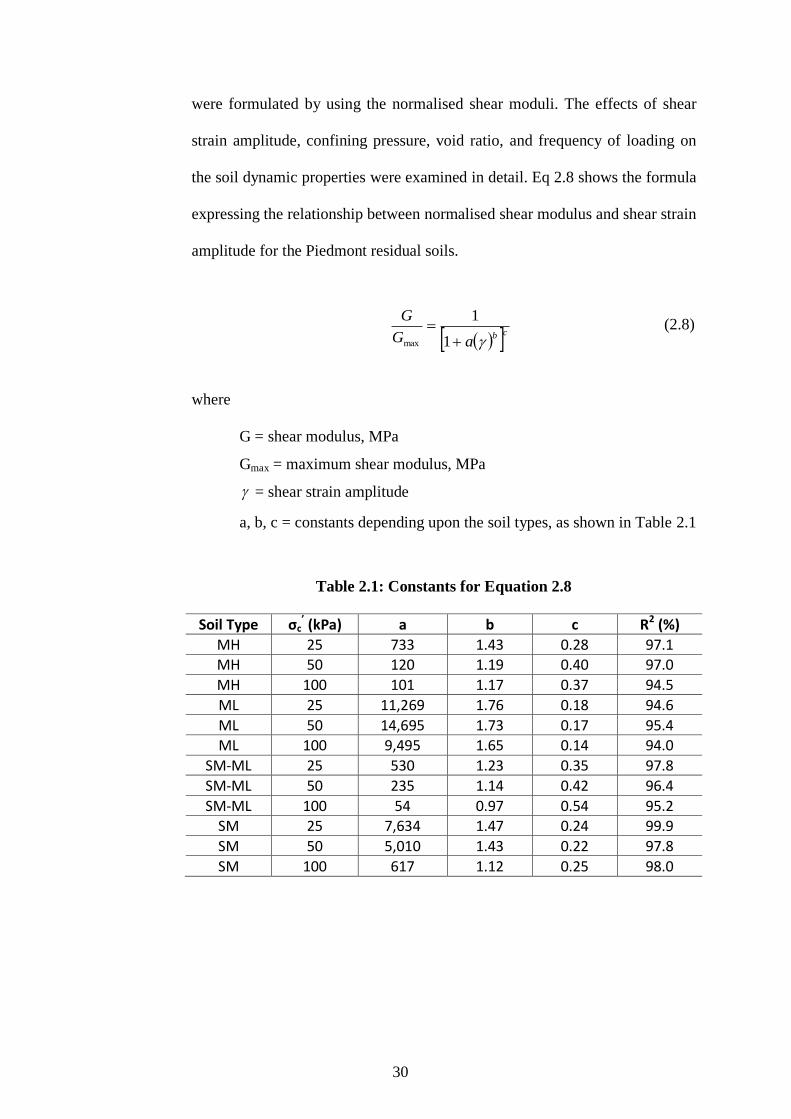
were formulated by using the normalised shear moduli. The effects of shear
strain amplitude, confining pressure, void ratio, and frequency of loading on
the soil dynamic properties were examined in detail. Eq 2.8 shows the formula
expressing the relationship between normalised shear modulus and shear strain
amplitude for the Piedmont residual soils.
cb
aG
G
1
1
max
(2.8)
where
G = shear modulus, MPa
Gmax = maximum shear modulus, MPa
= shear strain amplitude
a, b, c = constants depending upon the soil types, as shown in Table 2.1
Table 2.1: Constants for Equation 2.8
Soil Type σc’ (kPa) a b c R2 (%)
MH 25 733 1.43 0.28 97.1 MH 50 120 1.19 0.40 97.0
MH 100 101 1.17 0.37 94.5
ML 25 11,269 1.76 0.18 94.6
ML 50 14,695 1.73 0.17 95.4
ML 100 9,495 1.65 0.14 94.0
SM-ML 25 530 1.23 0.35 97.8
SM-ML 50 235 1.14 0.42 96.4
SM-ML 100 54 0.97 0.54 95.2 SM 25 7,634 1.47 0.24 99.9
SM 50 5,010 1.43 0.22 97.8
SM 100 617 1.12 0.25 98.0

31
2.7.2 Cyclic Triaxial Test
Cyclic triaxial test has been widely used to investigate the dynamic behaviours
of various types of soils (Kokushu, 1980; Leong et al., 2003; Tanaka and Lee,
2016; Tou, 2003). Kokushu (1980) examined the effects of shear strain
amplitude, effective confining pressure, and void ratio on the dynamic
properties of saturated Toyoura sand extending to a very small strain range.
Figure 2.13 and Figure 2.14 show the degradation curves of the saturated
Toyoura sand, in which the effects of confining pressure and void ratio were
examined.
Figure 2.13: Degradation Curves for Dense Sand with different
Confining Pressures (Kokushu, 1980)

32
Figure 2.14: Degradation Curves for Dense Sand with different
Void Ratios (Kokushu, 1980)
Leong et al. (2003) studied the dynamic behaviours of three selected
Singapore Jurong Formation tropical residual soils (denoted as JF1, JF2, and
JF3) by using a cyclic triaxial device tested with a loading frequency of 0.5
Hz. The fine contents of JF1, JF2, and JF3 were 75 %, 64 %, and 67 %,
respectively. In accordance with Unified Soil Classification System (USCS),
the JF1 was classified as a silt with low plasticity, while JF2 and JF3 were
classified as clay with low plasticity. The cyclic triaxial test was carried out
with an axial strain-controlled (0.005 % - 1 %) under an undrained condition.
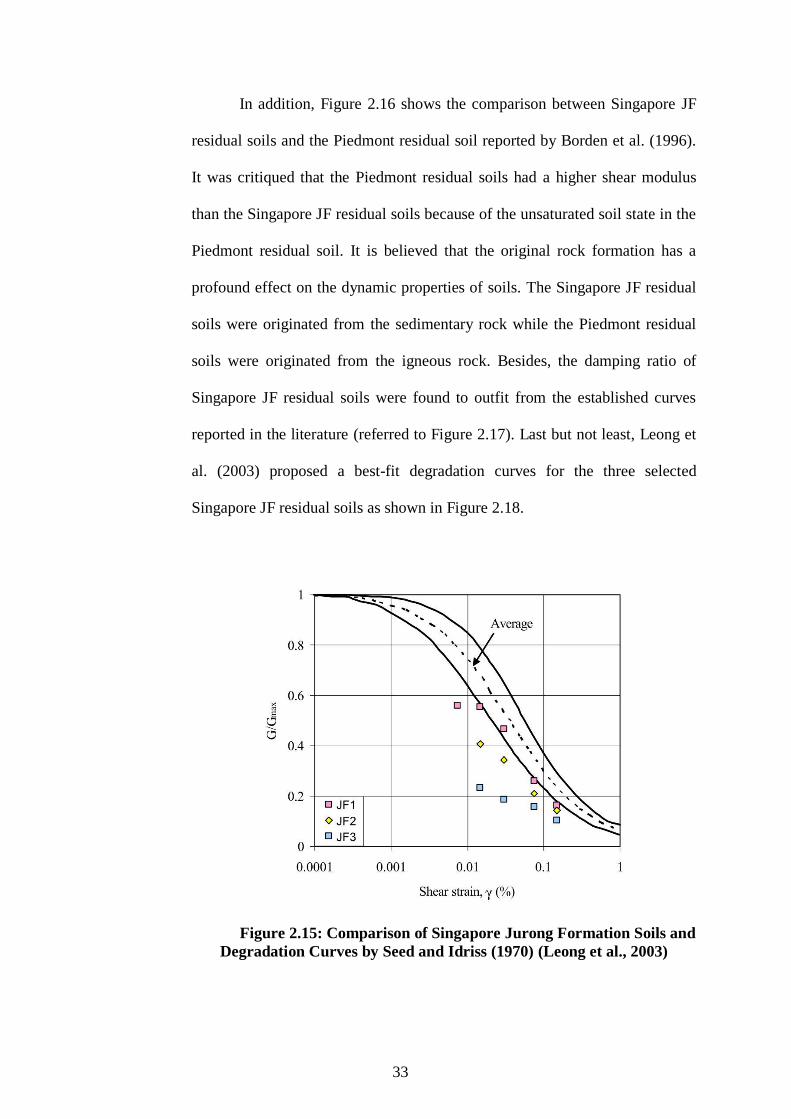
Figure 2.15 shows the comparison of Singapore JF residual soils and the
degradation relationships established by Seed and Idriss (1970). The
experimental data of Singapore JF residual soils were scattered below the
established degradation curves. The shear moduli of JF3 soil was the lowest
among the three Singapore JF residual soils. It is noteworthy that the
maximum shear modulus was computed using the empirical equations
proposed by Hardin and Black (1968), as presented in Eq 2.3.
33
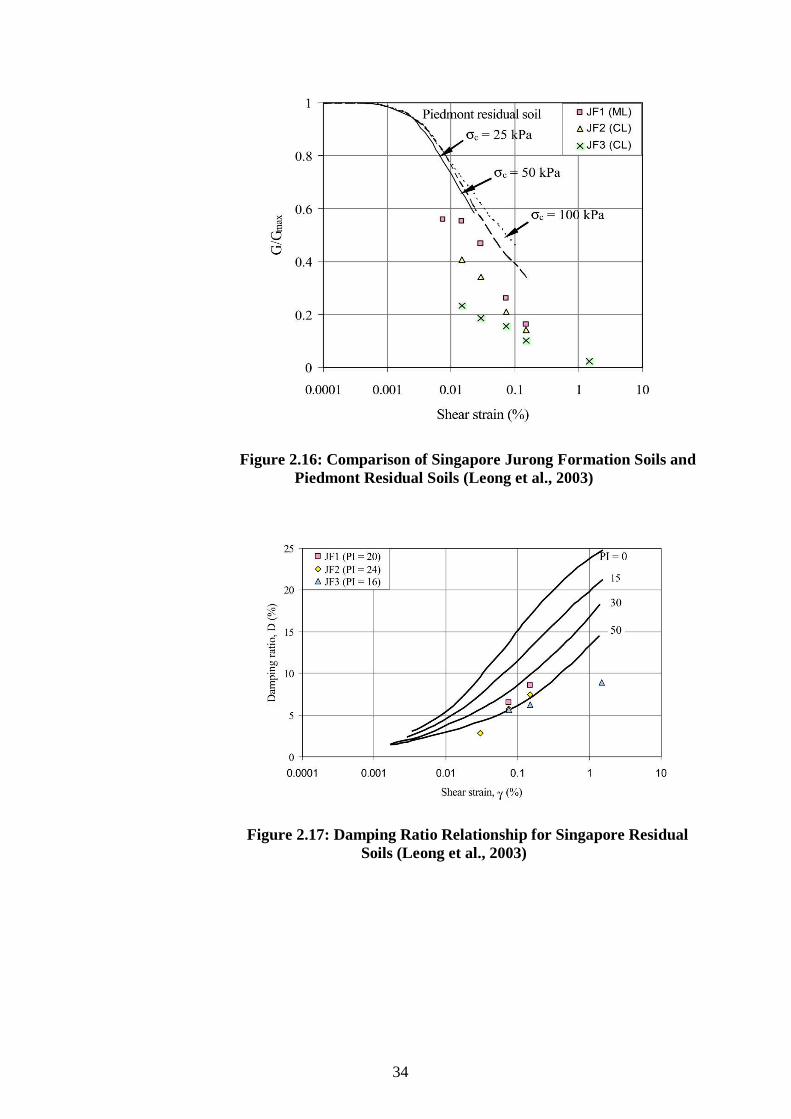
In addition, Figure 2.16 shows the comparison between Singapore JF
residual soils and the Piedmont residual soil reported by Borden et al. (1996).
It was critiqued that the Piedmont residual soils had a higher shear modulus
than the Singapore JF residual soils because of the unsaturated soil state in the
Piedmont residual soil. It is believed that the original rock formation has a
profound effect on the dynamic properties of soils. The Singapore JF residual
soils were originated from the sedimentary rock while the Piedmont residual
soils were originated from the igneous rock. Besides, the damping ratio of
Singapore JF residual soils were found to outfit from the established curves
reported in the literature (referred to Figure 2.17). Last but not least, Leong et
al. (2003) proposed a best-fit degradation curves for the three selected
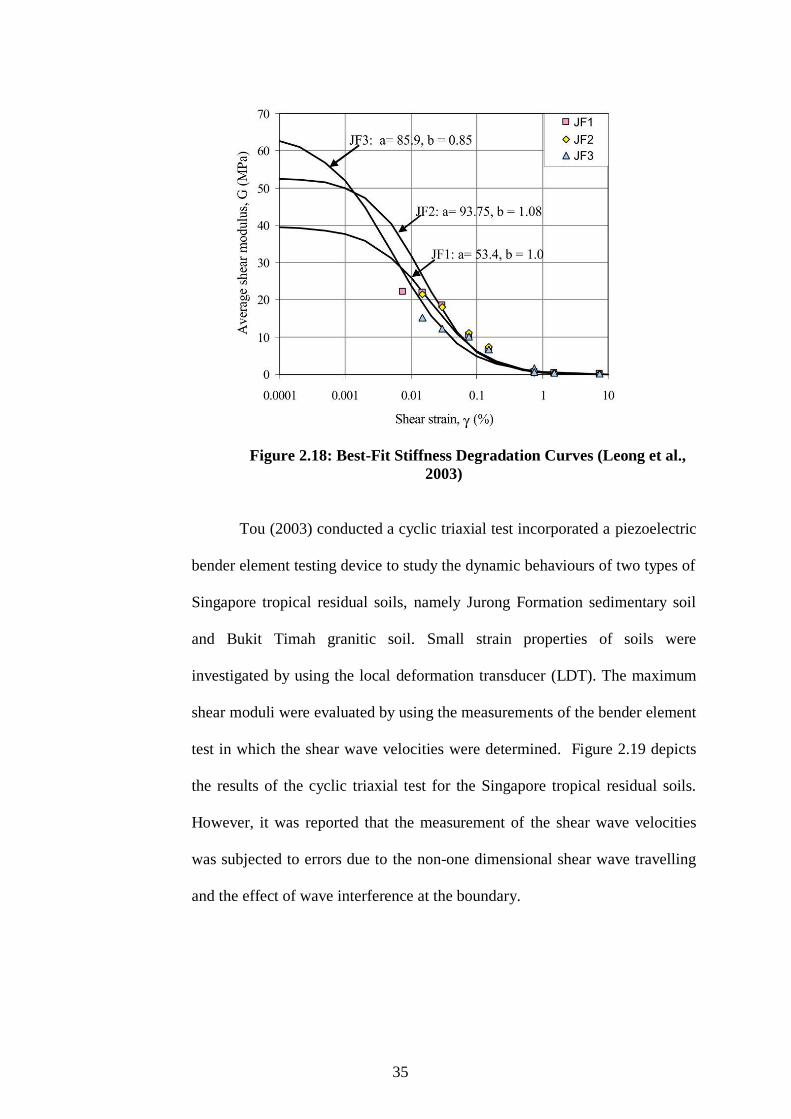
Singapore JF residual soils as shown in Figure 2.18.
Figure 2.15: Comparison of Singapore Jurong Formation Soils and
Degradation Curves by Seed and Idriss (1970) (Leong et al., 2003)
34
Figure 2.16: Comparison of Singapore Jurong Formation Soils and
Piedmont Residual Soils (Leong et al., 2003)
Figure 2.17: Damping Ratio Relationship for Singapore Residual
Soils (Leong et al., 2003)
35
Figure 2.18: Best-Fit Stiffness Degradation Curves (Leong et al.,
2003)
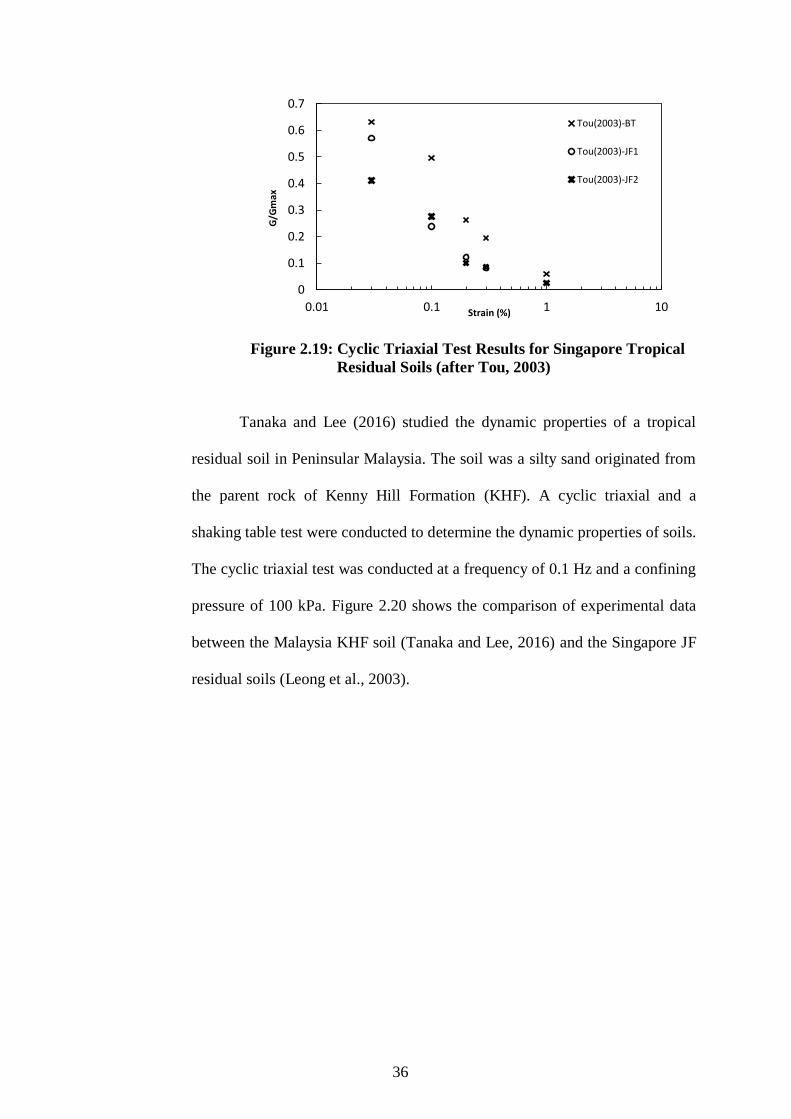
Tou (2003) conducted a cyclic triaxial test incorporated a piezoelectric
bender element testing device to study the dynamic behaviours of two types of
Singapore tropical residual soils, namely Jurong Formation sedimentary soil
and Bukit Timah granitic soil. Small strain properties of soils were
investigated by using the local deformation transducer (LDT). The maximum
shear moduli were evaluated by using the measurements of the bender element
test in which the shear wave velocities were determined. Figure 2.19 depicts
the results of the cyclic triaxial test for the Singapore tropical residual soils.
However, it was reported that the measurement of the shear wave velocities
was subjected to errors due to the non-one dimensional shear wave travelling
and the effect of wave interference at the boundary.
36
Figure 2.19: Cyclic Triaxial Test Results for Singapore Tropical
Residual Soils (after Tou, 2003)
Tanaka and Lee (2016) studied the dynamic properties of a tropical
residual soil in Peninsular Malaysia. The soil was a silty sand originated from
the parent rock of Kenny Hill Formation (KHF). A cyclic triaxial and a
shaking table test were conducted to determine the dynamic properties of soils.
The cyclic triaxial test was conducted at a frequency of 0.1 Hz and a confining
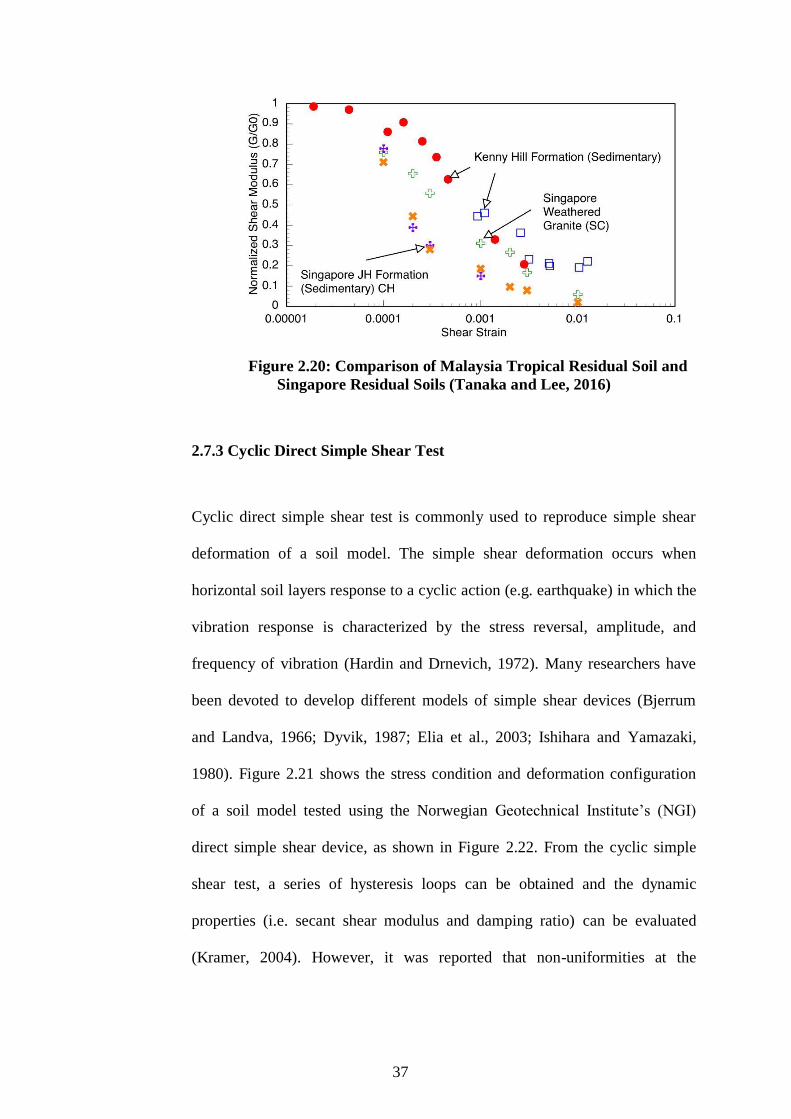
pressure of 100 kPa. Figure 2.20 shows the comparison of experimental data
between the Malaysia KHF soil (Tanaka and Lee, 2016) and the Singapore JF
residual soils (Leong et al., 2003).
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.01 0.1 1 10
G/G
max
Strain (%)
Tou(2003)-BT
Tou(2003)-JF1
Tou(2003)-JF2
37
Figure 2.20: Comparison of Malaysia Tropical Residual Soil and
Singapore Residual Soils (Tanaka and Lee, 2016)
2.7.3 Cyclic Direct Simple Shear Test
Cyclic direct simple shear test is commonly used to reproduce simple shear
deformation of a soil model. The simple shear deformation occurs when
horizontal soil layers response to a cyclic action (e.g. earthquake) in which the
vibration response is characterized by the stress reversal, amplitude, and
frequency of vibration (Hardin and Drnevich, 1972). Many researchers have
been devoted to develop different models of simple shear devices (Bjerrum
and Landva, 1966; Dyvik, 1987; Elia et al., 2003; Ishihara and Yamazaki,
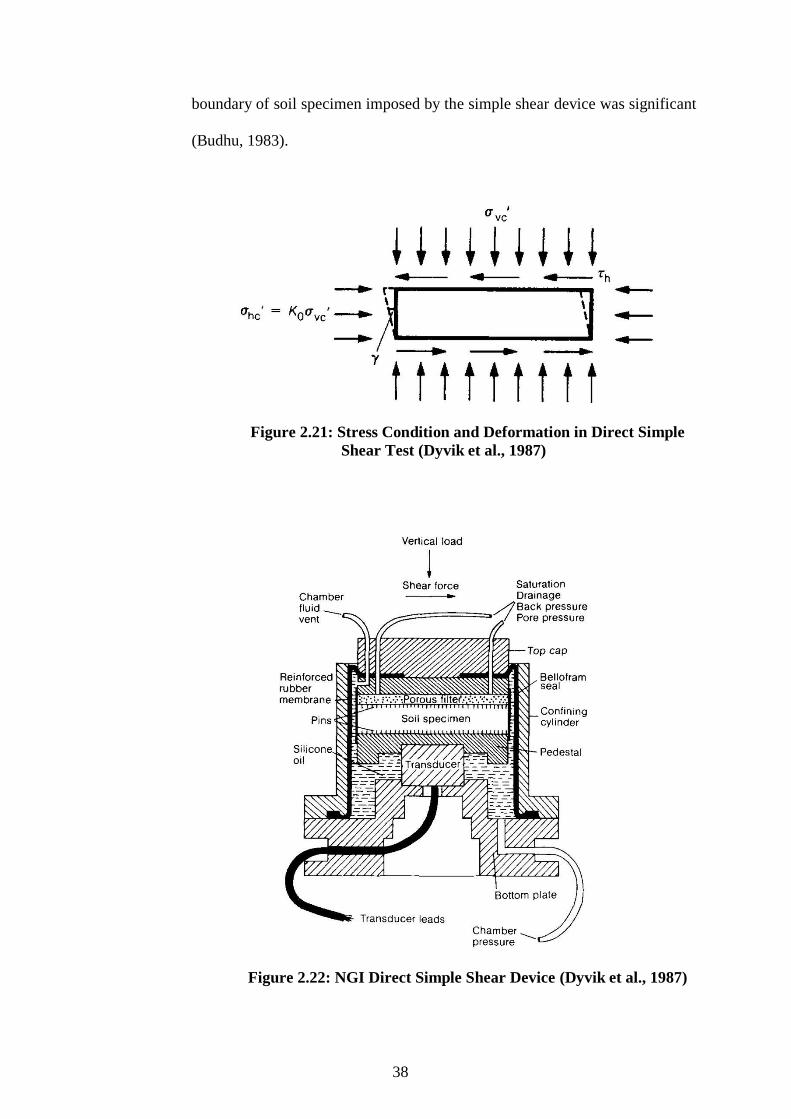
1980). Figure 2.21 shows the stress condition and deformation configuration
of a soil model tested using the Norwegian Geotechnical Institute’s (NGI)
direct simple shear device, as shown in Figure 2.22. From the cyclic simple
shear test, a series of hysteresis loops can be obtained and the dynamic
properties (i.e. secant shear modulus and damping ratio) can be evaluated
(Kramer, 2004). However, it was reported that non-uniformities at the
38
boundary of soil specimen imposed by the simple shear device was significant
(Budhu, 1983).
Figure 2.21: Stress Condition and Deformation in Direct Simple
Shear Test (Dyvik et al., 1987)
Figure 2.22: NGI Direct Simple Shear Device (Dyvik et al., 1987)

39
Besides, a double specimen direct simple shear device (DSDSS) and a
two-directional simple shear device were developed to investigate the dynamic
behaviours of soil (Elia et al., 2003; Ishihara and Yamazaki, 1980). Figure
2.23 shows the schematic diagram of the DSDSS device, while Figure 2.24
shows the hysteresis loop obtained from the testing.
Figure 2.23: Schematic Diagram of Double Specimens Direct
Simple Shear Device (Lanzo et al., 1997)
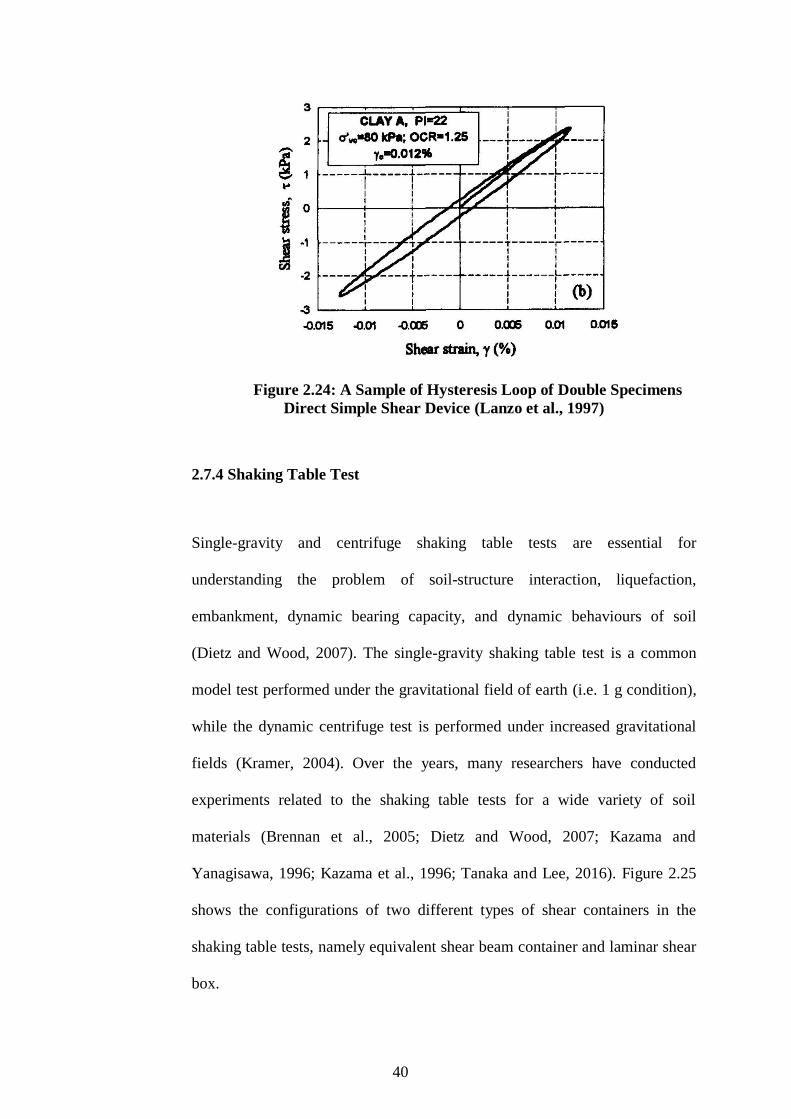
40
Figure 2.24: A Sample of Hysteresis Loop of Double Specimens
Direct Simple Shear Device (Lanzo et al., 1997)
2.7.4 Shaking Table Test
Single-gravity and centrifuge shaking table tests are essential for
understanding the problem of soil-structure interaction, liquefaction,
embankment, dynamic bearing capacity, and dynamic behaviours of soil
(Dietz and Wood, 2007). The single-gravity shaking table test is a common
model test performed under the gravitational field of earth (i.e. 1 g condition),
while the dynamic centrifuge test is performed under increased gravitational
fields (Kramer, 2004). Over the years, many researchers have conducted
experiments related to the shaking table tests for a wide variety of soil
materials (Brennan et al., 2005; Dietz and Wood, 2007; Kazama and
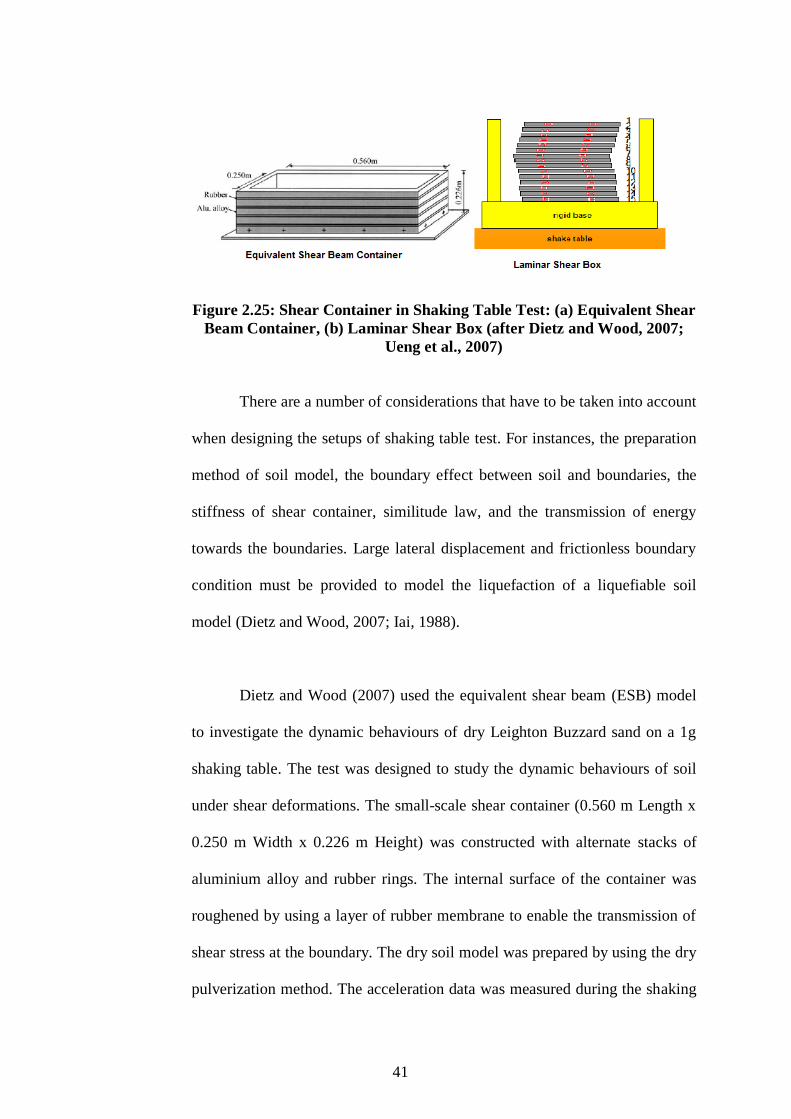
Yanagisawa, 1996; Kazama et al., 1996; Tanaka and Lee, 2016). Figure 2.25
shows the configurations of two different types of shear containers in the
shaking table tests, namely equivalent shear beam container and laminar shear
box.
41
Figure 2.25: Shear Container in Shaking Table Test: (a) Equivalent Shear
Beam Container, (b) Laminar Shear Box (after Dietz and Wood, 2007;
Ueng et al., 2007)
There are a number of considerations that have to be taken into account
when designing the setups of shaking table test. For instances, the preparation
method of soil model, the boundary effect between soil and boundaries, the
stiffness of shear container, similitude law, and the transmission of energy
towards the boundaries. Large lateral displacement and frictionless boundary
condition must be provided to model the liquefaction of a liquefiable soil
model (Dietz and Wood, 2007; Iai, 1988).
Dietz and Wood (2007) used the equivalent shear beam (ESB) model
to investigate the dynamic behaviours of dry Leighton Buzzard sand on a 1g
shaking table. The test was designed to study the dynamic behaviours of soil
under shear deformations. The small-scale shear container (0.560 m Length x
0.250 m Width x 0.226 m Height) was constructed with alternate stacks of
aluminium alloy and rubber rings. The internal surface of the container was
roughened by using a layer of rubber membrane to enable the transmission of
shear stress at the boundary. The dry soil model was prepared by using the dry
pulverization method. The acceleration data was measured during the shaking
42
table test. High-pass Butterworth filtering was performed on the measured
acceleration record to obtain the displacement profiles and subsequently the
dynamic properties of soil. The dynamic properties over a wide range of shear
strain amplitudes (i.e. 0.001 % - 6 %) were determined from the experiment.
Besides, the performance of the shear box was assessed by monitoring the
end-wall deflection of the soil model.
Kazama and Yanagisawa (1996) conducted a dynamic centrifuge
shaking table test on a saturated soft clay. Accelerometers were installed at the
surface of container while pore water pressure transducers were installed along
the height of soil internally. The measured acceleration records were
processed by using low-cut filtering approach to avoid baseline drift when
integrating. In addition, Kazama et al. (1996) carried out a dynamic centrifuge
shaking table test on a sandy soil and developed a new evaluation technique
that could reproduce the actual earthquake condition in laboratory. Figure 2.26
shows one of the hysteresis loops obtained from the centrifuge shaking table
test.
Kazama et al. (1996) also proposed an approach to determine the
inertia shear stress developed in the soil layers below ground surface. Eq 2.9
shows the formula to obtain the shear stress at an arbitrary depth of soil
deposit, while Figure 2.27 illustrates the essential terminologies involved in
the formula.

43
Figure 2.26: A Typical Hysteresis Loop of Soft Clay (Kazama and
Yanagisawa, 1996)
1
1
1
38
)(
nnnn
n
i
iii aaH
Haz
(2.9)
where
)(z = inertia shear stress at arbitrary depth, Pa
ia = acceleration at arbitrary soil interface, m/s2
Hi = depth of soil layer, m
i = bulk density of soil layer, kg/m3
na = acceleration at nth soil interface, m/s2
1na = acceleration at (n+1)th soil interface, m/s2
Figure 2.27: Acceleration and Displacement below Ground Surface
(Kazama et al., 1996)
44
Tanaka and Lee (2016) conducted a 1g shaking table test on a sandy
soil in Malaysia. The soil model, which was originated from the Kenny Hill
Formation, was compacted to the designated volume in which the soil
condition in a compacted embankment could be reproduced. Accelerometers
were installed to monitor the changes of acceleration with time and baseline
correction was performed to avoid the baseline drift. The dynamic properties
were obtained from a series of hysteresis loops. However, the integrated
displacement data from accelerometers were subjected to certain degrees of
uncertainties. Therefore, a direct displacement measurement technique has to
be performed to obtain accurate and reliable results. Slifka (2004) used laser
displacement sensor as a reference when processing the measured acceleration
data of a moving object. They also reported an acceptable difference of
displacement between the measurements obtained from the laser displacement
sensor and the displacement derived from the acceleration record. In light of
the non-destructive nature and the accurate measurement on dynamic
movement of an object, laser displacement sensor can serve as a favourable
option for measuring a small deformation of soil specimens.
Dynamic properties covering a specific range of shear strain
amplitudes can be obtained from the 1g shaking table tests, but it was limited
by the low confining pressure exerted on the soil model. Table 1 summarizes
the confining pressure and shear strain ranges that have been successfully
achieved by using the 1g shaking table test from the previous studies (Araei
and Towhata 2014, Dietz and Muir Wood 2007, Tsai et al. 2016, Tanaka and
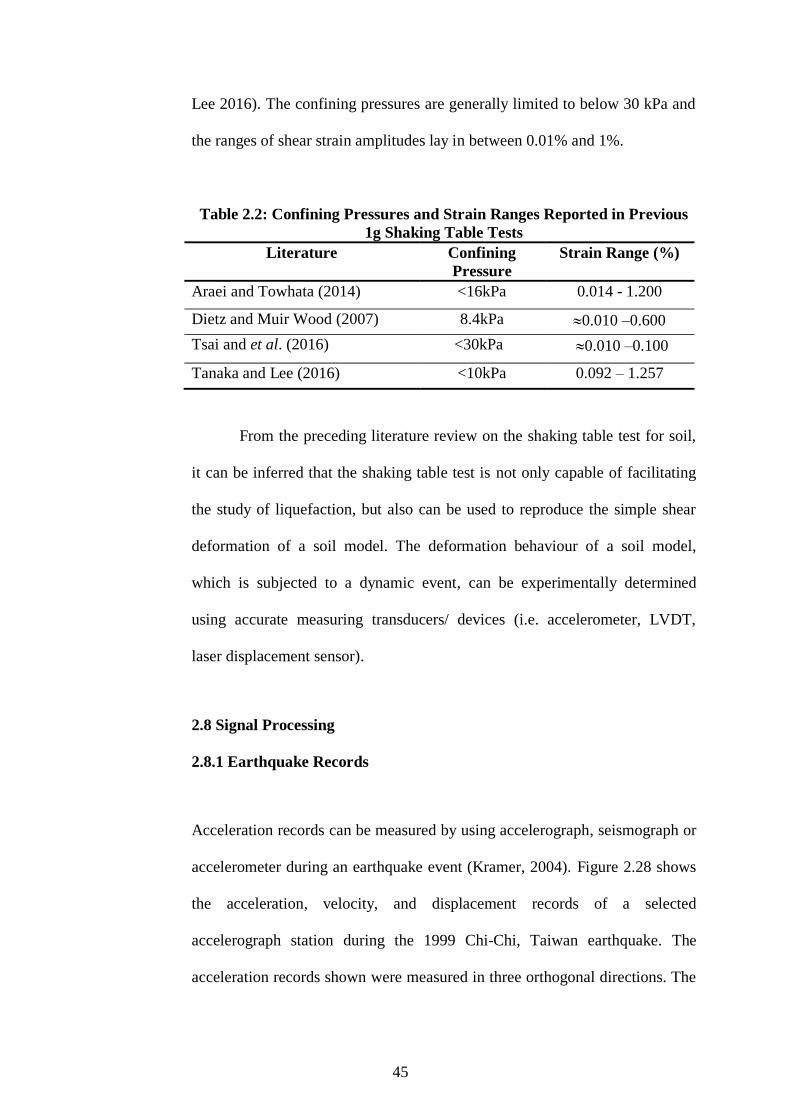
45
Lee 2016). The confining pressures are generally limited to below 30 kPa and
the ranges of shear strain amplitudes lay in between 0.01% and 1%.
Table 2.2: Confining Pressures and Strain Ranges Reported in Previous
1g Shaking Table Tests
Literature Confining
Pressure
Strain Range (%)
Araei and Towhata (2014) <16kPa 0.014 - 1.200
Dietz and Muir Wood (2007) 8.4kPa 0.010 –0.600
Tsai and et al. (2016) <30kPa 0.010 –0.100
Tanaka and Lee (2016) <10kPa 0.092 – 1.257
From the preceding literature review on the shaking table test for soil,
it can be inferred that the shaking table test is not only capable of facilitating
the study of liquefaction, but also can be used to reproduce the simple shear
deformation of a soil model. The deformation behaviour of a soil model,
which is subjected to a dynamic event, can be experimentally determined
using accurate measuring transducers/ devices (i.e. accelerometer, LVDT,
laser displacement sensor).
2.8 Signal Processing
2.8.1 Earthquake Records
Acceleration records can be measured by using accelerograph, seismograph or
accelerometer during an earthquake event (Kramer, 2004). Figure 2.28 shows
the acceleration, velocity, and displacement records of a selected
accelerograph station during the 1999 Chi-Chi, Taiwan earthquake. The
acceleration records shown were measured in three orthogonal directions. The
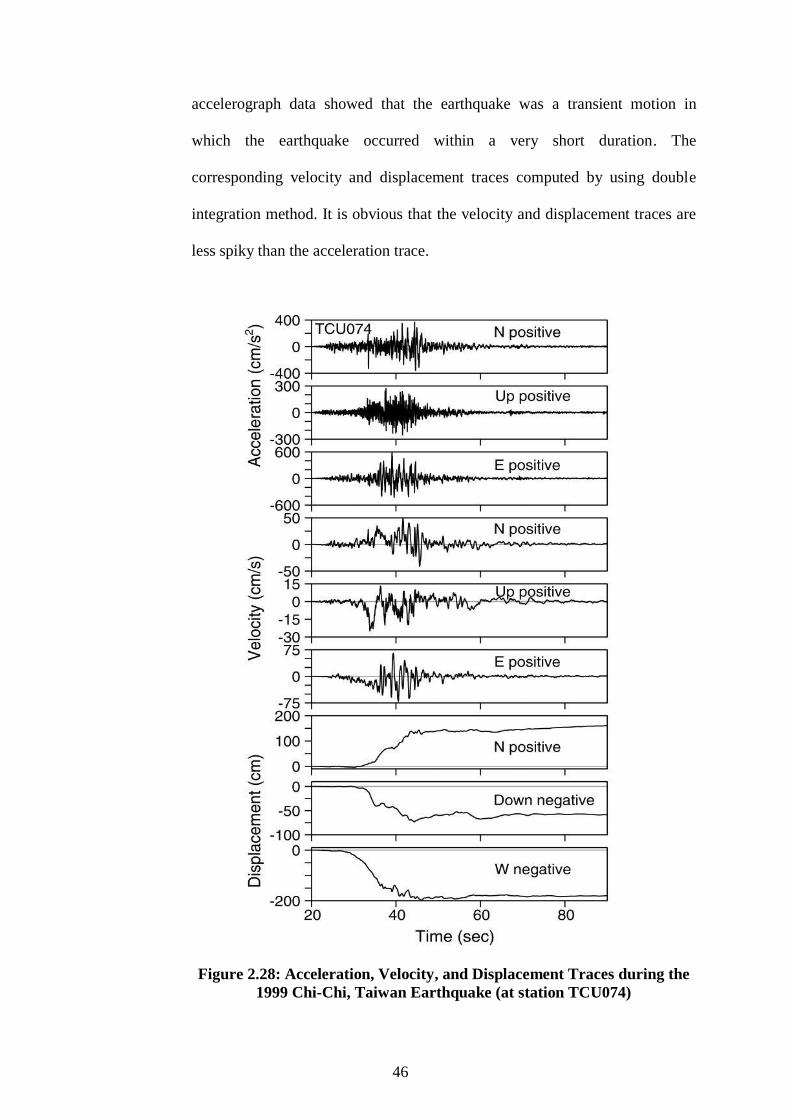
46
accelerograph data showed that the earthquake was a transient motion in
which the earthquake occurred within a very short duration. The
corresponding velocity and displacement traces computed by using double
integration method. It is obvious that the velocity and displacement traces are
less spiky than the acceleration trace.
Figure 2.28: Acceleration, Velocity, and Displacement Traces during the
1999 Chi-Chi, Taiwan Earthquake (at station TCU074)
47
Important ground motion parameters can be derived from the
acceleration records through a series of data processing approaches. Ground
motion parameters and their characteristics are of importance to seismologists,
geologists, and earthquake engineers. Among many parameters, residual
displacement is essential for investigating the fault rupture after the occurrence
of a strong ground motion. The permanent or residual displacement could be
caused by plastic deformation of near-surface material or elastic deformation
of ground as the result of co-seismic slip on the fault (Boore and Bommer,
2005).
The final displacement in Figure 2.28 is numerically large (i.e. about 2
m) and unphysical (Boore, 2001). Unphysical residual displacement will be
encountered if the acceleration record is not corrected or adjusted
appropriately. Under common practices, the interpretation of numerically
integrated displacement data from an earthquake event relies upon individual
judgement, and hence exposed to numerous uncertainties. In a study of the
Chi-Chi Taiwan earthquake, Boore (2001) used the technology of Global
Positioning System (GPS) to verify his proposed correction schemes on the
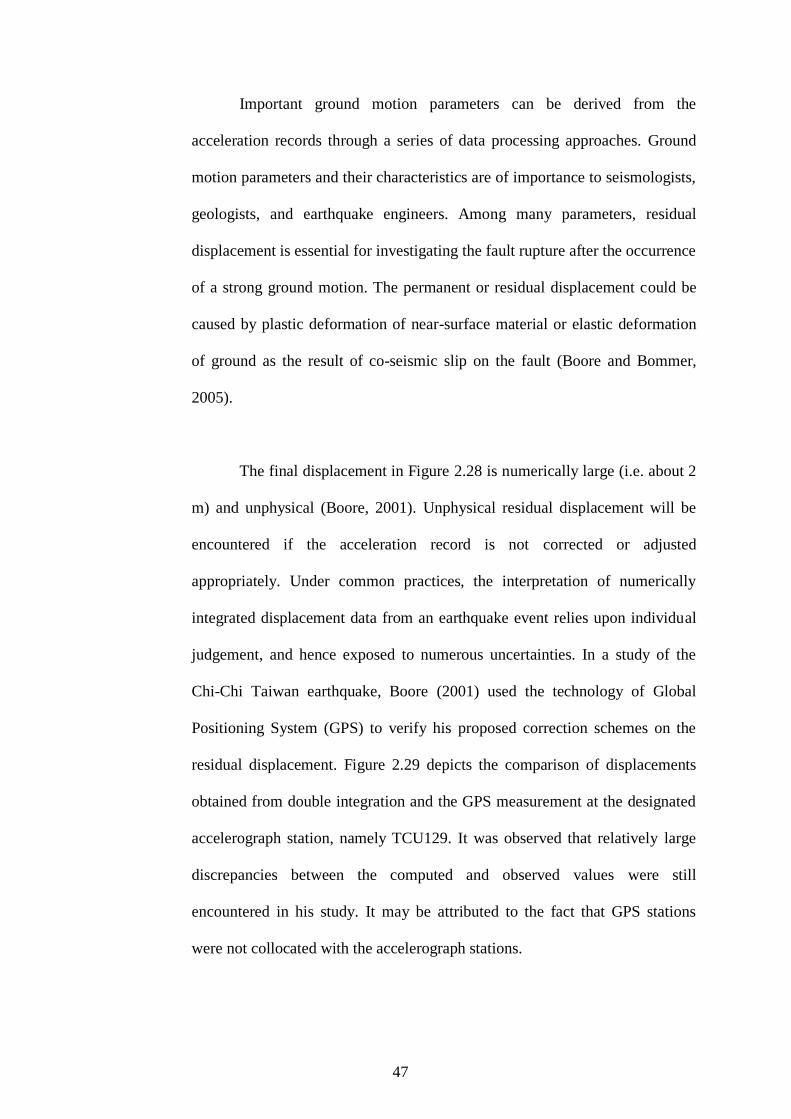
residual displacement. Figure 2.29 depicts the comparison of displacements
obtained from double integration and the GPS measurement at the designated
accelerograph station, namely TCU129. It was observed that relatively large
discrepancies between the computed and observed values were still
encountered in his study. It may be attributed to the fact that GPS stations
were not collocated with the accelerograph stations.
48
Figure 2.29: Comparison of Displacements obtained from Double
Integration and GPS Measurement (after Boore, 2001)
2.8.2 Baseline Correction
The unphysical residual displacement as shown in Figure 2.28 is attributed to
the baseline drift and the initial condition in numerical integration. At the end
of each shaking motion, the velocity should become zero while certain amount
of residual displacement could be expected (Boore and Bommer, 2005). Over
the years, numerous adjustment schemes for processing seismic records have
been proposed by many researchers worldwide (Iwan et al., 1985; Ohsaki,
1995; Chiu, 1997; Boore, 2001). Although there are various correction
schemes proposed to recover the actual shaking record, it is almost impossible
to recover an earthquake record perfectly.
49
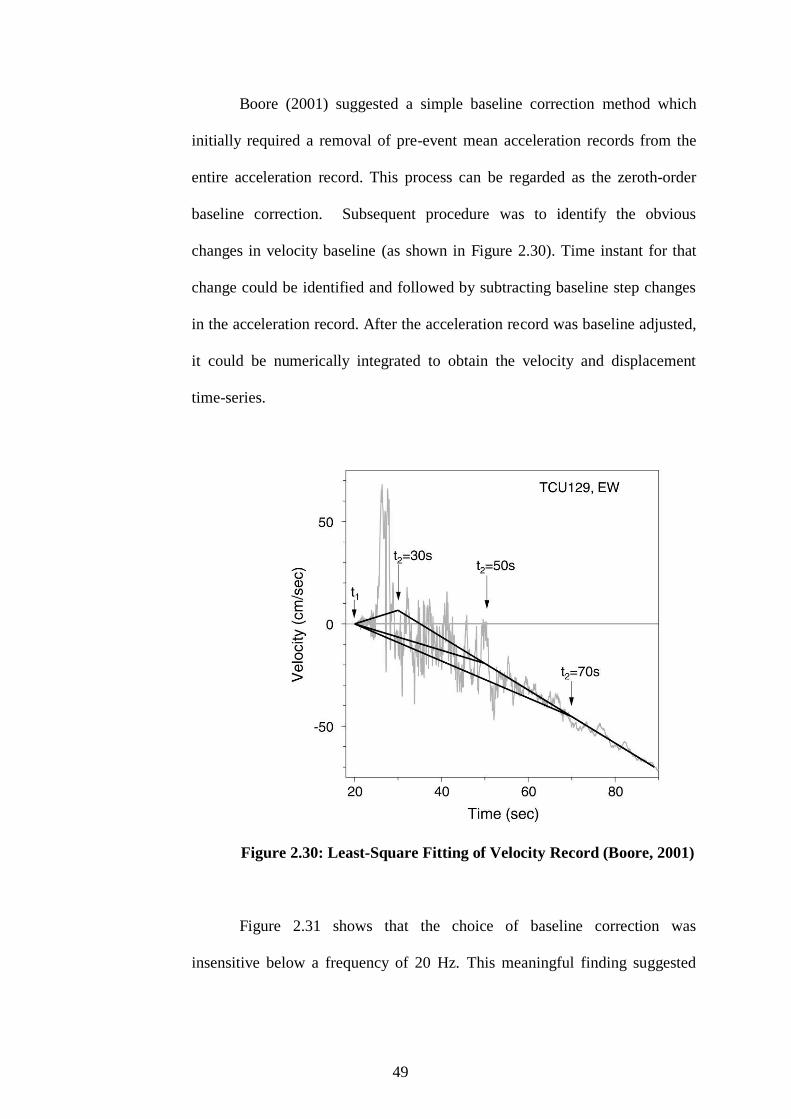
Boore (2001) suggested a simple baseline correction method which
initially required a removal of pre-event mean acceleration records from the
entire acceleration record. This process can be regarded as the zeroth-order
baseline correction. Subsequent procedure was to identify the obvious
changes in velocity baseline (as shown in Figure 2.30). Time instant for that
change could be identified and followed by subtracting baseline step changes
in the acceleration record. After the acceleration record was baseline adjusted,
it could be numerically integrated to obtain the velocity and displacement
time-series.
Figure 2.30: Least-Square Fitting of Velocity Record (Boore, 2001)
Figure 2.31 shows that the choice of baseline correction was
insensitive below a frequency of 20 Hz. This meaningful finding suggested

50
that most of the structures under seismic activities would not be affected by
the choice of baseline correction methods.
Figure 2.31: Displacement Response Spectra (Boore, 2005)
In Japan, Ohsaki (1995) suggested a well-known baseline correction
procedure which was fundamentally based on the assumptions that velocity at
the end of shaking would return to zero whilst certain amount of residual
displacement could be expected.
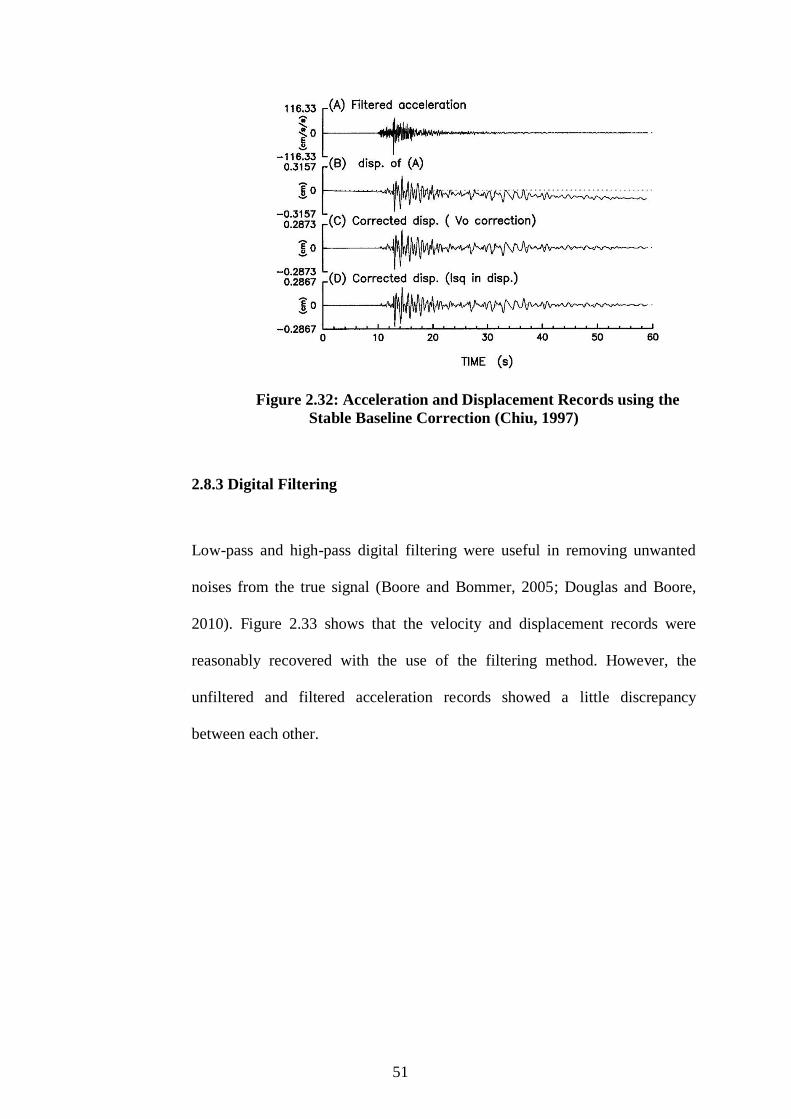
In addition, Chiu (1997) suggested a “stable” three-step algorithm
baseline correction scheme for processing digital strong motion data. This
method involved least-square fitting in acceleration record, high-pass filtering
in acceleration record, and subtracting the initial velocity value. Figure 2.32
shows the acceleration and displacement records using the approach proposed
by Chiu (1997).
51
Figure 2.32: Acceleration and Displacement Records using the
Stable Baseline Correction (Chiu, 1997)
2.8.3 Digital Filtering
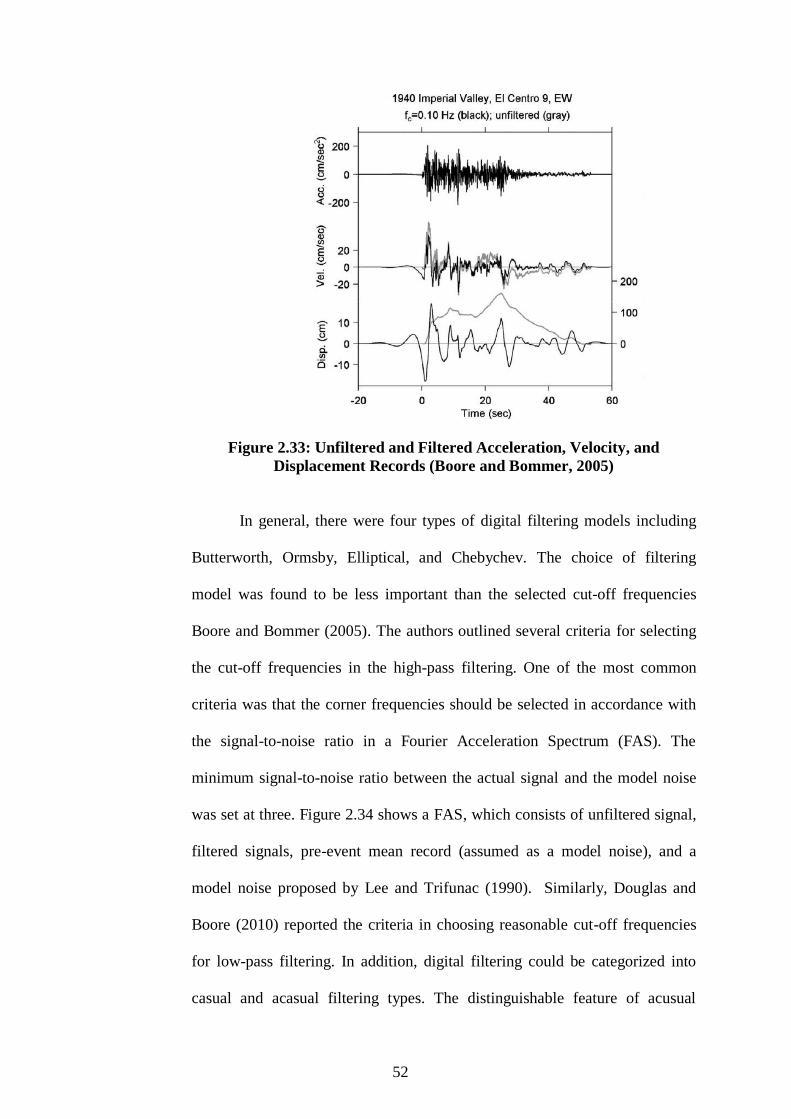
Low-pass and high-pass digital filtering were useful in removing unwanted
noises from the true signal (Boore and Bommer, 2005; Douglas and Boore,
2010). Figure 2.33 shows that the velocity and displacement records were
reasonably recovered with the use of the filtering method. However, the
unfiltered and filtered acceleration records showed a little discrepancy
between each other.
52
Figure 2.33: Unfiltered and Filtered Acceleration, Velocity, and
Displacement Records (Boore and Bommer, 2005)
In general, there were four types of digital filtering models including
Butterworth, Ormsby, Elliptical, and Chebychev. The choice of filtering
model was found to be less important than the selected cut-off frequencies
Boore and Bommer (2005). The authors outlined several criteria for selecting
the cut-off frequencies in the high-pass filtering. One of the most common
criteria was that the corner frequencies should be selected in accordance with
the signal-to-noise ratio in a Fourier Acceleration Spectrum (FAS). The
minimum signal-to-noise ratio between the actual signal and the model noise
was set at three. Figure 2.34 shows a FAS, which consists of unfiltered signal,
filtered signals, pre-event mean record (assumed as a model noise), and a
model noise proposed by Lee and Trifunac (1990). Similarly, Douglas and
Boore (2010) reported the criteria in choosing reasonable cut-off frequencies
for low-pass filtering. In addition, digital filtering could be categorized into
casual and acasual filtering types. The distinguishable feature of acusual

53
filtering is that it would not produce any phase shift in the records. This can be
accomplished by adding a line of data with zero amplitude, which is known as
pad, before the starting of a record and after the end of the record. The length
of pads depends on the filter frequency and filter order (Boore and Bommer,
2005). Boore and Bommer (2005) also opined that the pre-event and post-
event records were not often sufficient for the acasual filtering.
Figure 2.34: Fourier Acceleration Spectrum of Unfiltered and Filtered
Acceleration Records (Boore and Bommer, 2005)
Mollova (2006) presented the application of digital filtering using a
commercial software, namely SeismoSignal to process an actual earthquake
record in Turkey. SeismoSignal is one of the popular commercial software that
can be used to process earthquake strong-motion data with the function of
graphical user interface. Baseline correction and digital filtering methods are
incorporated in the software package. The effects of using various types of
54
digital filtering models (i.e. Chebyshev, Butterworth, Bessel, and Elliptic)
were examined in detail. Mollova (2006) examined the influences of filtering
types (i.e. Butterworth, Chebyshev, and Bessel) and the order of filtering on
the acceleration, velocity, and displacement time series. In addition, the
Fourier Amplitude Spectra and the response spectra (with damping
characteristics of 5 %) the dynamic event were evaluated.
2.9 Concluding Remarks
In summary, Malaysia is a tropical country with abundant of residual soils
covering the superficial soil deposits. Recent occurrences of earthquakes and
tremors have attracted increasing attention from the public in Malaysia. From
the review of the current available literature, it can be concluded that studies
on soil dynamics are still very limited in Malaysia. More experimental testing
should be carried out to enrich the current database of soil dynamic properties,
particularly for tropical residual soil.
From the literature, shear modulus degradation curves as well as the
relationships between damping ratio and shear strain amplitude were widely
used to describe the dynamic behaviours of soil. The effects of density,
effective confining pressure, plasticity index, shear strain amplitude, and etc.
on soil dynamic properties were examined. The effects of density and effective
confining pressure are profound in sandy soil, while the effect of plasticity
index and rate of loading are significant in clayey soil. From the foregoing
literature study, it is beneficial to compare the experimental data of selected
tropical residual soils in Malaysia with the above-mentioned degradation

55
curves of sand and clay. This is because tropical residual soils are peculiarly
characterized with sand-to-clay mixture. The effects of the above-mentioned
parameters on tropical residual soil, such as confining pressure, plasticity
index, shear strain amplitude, and soil type, can be investigated in further
detail.
A number of soil dynamic testing was reviewed, such as cyclic triaxial
test, cyclic torsional shear test, cyclic simple shear test, shaking table test, and
etc. Shaking table test was found to be useful in providing reasonable
representation of seismic soil response. However, the confining pressures are
generally limited to below 30 kPa and the ranges of shear strain amplitudes lay
in between 0.01 % and 1 % on a 1g shaking table.
Appropriate signal processing is required to process the acceleration
records from an earthquake or a dynamic test. Baseline correction and digital
filtering methods are essential to remove the low and high-frequency noises
from an actual signal. However, the integrated displacement data from an
accelerometer record is often subjected to uncertainties. Therefore, a direct
displacement measurement should be used as a reference when processing the
measured acceleration records.
CHAPTER 3
METHODOLOGY
3.1 Introduction
From a variety of available soil dynamic tests, the shaking table test is selected
in the present study because it can facilitate the investigation of dynamic
behaviour of tropical residual soils and the apparatus is readily available in the
laboratory of the author’s institution. This chapter describes the methodology
of soil sampling, physical tests, development of testing setups,
instrumentation, and testing parameters.
3.2 Soil Sampling and Physical Tests
3.2.1 Soil Sampling
Three types of soil were sampled from the superficial layer (i.e. at about 2 m
below ground surface) at the selected sites in Peninsular Malaysia. The soil
samples consisted of a sand mining trail and two typical types of tropical
residual soil. The sand mining trail was sampled from a site at Bandar Sunway
(Soil C), while the two samples of tropical residual soils were collected from a
site at Kajang (Soil A) and a site at Simpang Renggam (Soil B), respectively.
The sand mining trail was not a typical tropical residual soil but it was studied
for comparison purposes because the dynamic behaviour of sandy soil has
been well established in the previous literature.
57
Figure 3.1 shows the locations of the sampling sites. In general, the
residual soils in Peninsular Malaysia can be grouped into two categories,
namely granitic residual soil and sedimentary residual soil. Based on the
locations of the sampling sites as shown in the Figure 3.1, the two tropical
residual soils (i.e. Soil A and Soil B) are originated from the sedimentary rock.
In specific, the soil deposit of Kajang formation (Soil A) belongs to a
metasedimentary rock formation which consists of schist and phyllite (Gue
and Wong, 2009). The soil in Simpang Renggam area (Soil B) is originated
from a clastic sedimentary rock formation which consists of shale material
(Tan and Azwari, 2001). In tropical countries, schist and shale would produce
mostly silty materials or soils with illitic clay minerals. Apart from the
physical weathering process, chemical weathering is prevalence in hot and
humid regions in which the rock is decomposed into silty or clayey residual
soils (Huat et al., 2012). In terms of the geological age of rock, the Kajang
schist is within the Silurian and Ordovician periods, whereas the rock of
Simpang Renggam is in the middle to late Permian period. The Permian
period is earlier than the Silurian and Ordovician period (Foo, 1983).

58
Figure 3.1: Locations of Soil Sampling Sites
3.2.2 Soil Physical Tests
Soil disaggregation and standard physical tests were performed upon
collection of the soil samples. Firstly, unwanted debris and substances were
removed from the collected soils. The soils were oven-dried at 105 ºC for 24
hours. The soil physical tests were subsequently conducted in compliance with
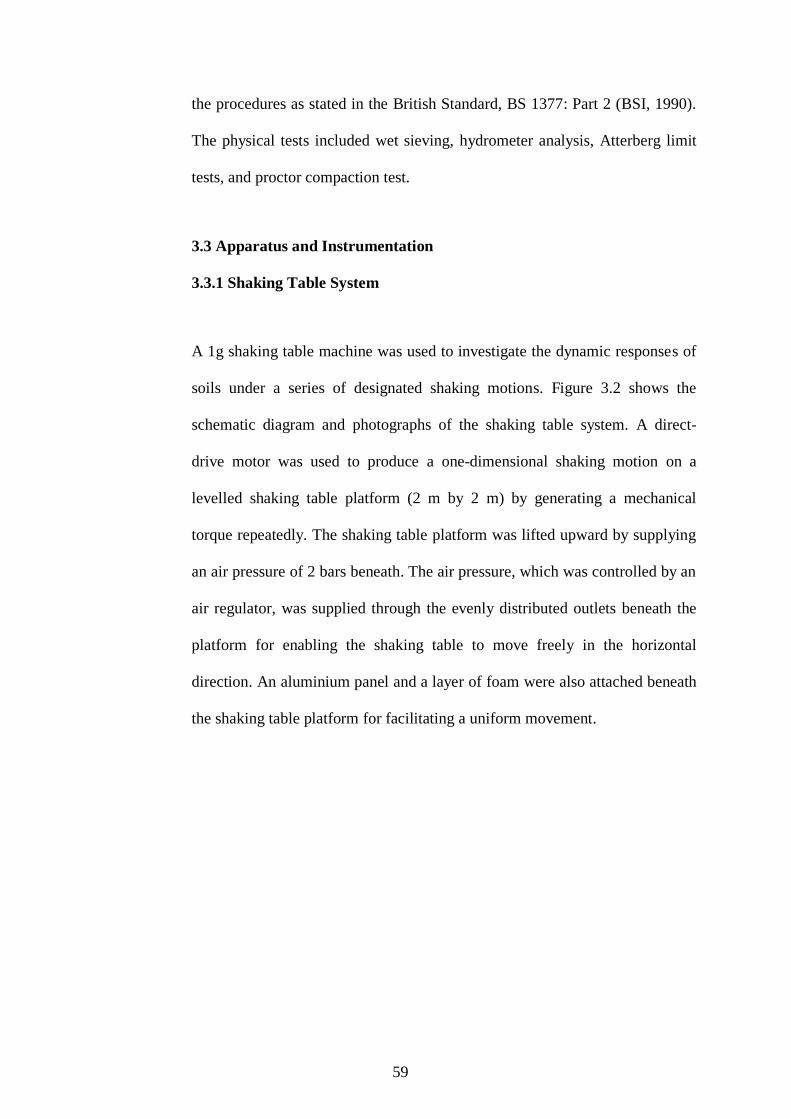
59
the procedures as stated in the British Standard, BS 1377: Part 2 (BSI, 1990).
The physical tests included wet sieving, hydrometer analysis, Atterberg limit
tests, and proctor compaction test.
3.3 Apparatus and Instrumentation
3.3.1 Shaking Table System
A 1g shaking table machine was used to investigate the dynamic responses of
soils under a series of designated shaking motions. Figure 3.2 shows the
schematic diagram and photographs of the shaking table system. A direct-
drive motor was used to produce a one-dimensional shaking motion on a
levelled shaking table platform (2 m by 2 m) by generating a mechanical
torque repeatedly. The shaking table platform was lifted upward by supplying
an air pressure of 2 bars beneath. The air pressure, which was controlled by an
air regulator, was supplied through the evenly distributed outlets beneath the
platform for enabling the shaking table to move freely in the horizontal
direction. An aluminium panel and a layer of foam were also attached beneath
the shaking table platform for facilitating a uniform movement.
60
Figure 3.2: Shaking Table System
A schematic flow diagram for the signal transmission and power
supply is illustrated in Figure 3.3. Digital signal must be sent to a driver unit
(NSK Ltd, model: ESA25, as shown in Figure 3.4) in order to produce a
desired magnitude of horizontal movement (i.e. linear displacement and
frequency of shaking). After the desired input displacement (unit of
displacement) and shaking frequency (Hz) had been input, the digital signal
was converted into an analogue signal through a digital-to-analogue converter
(D/A device). The operation of D/A device was controlled by Turtle Kogyo
D/A, as shown in Figure 3.5. It is worth mentioning that the computer was not
only used for signal transmission and communication, but also for supplying
voltage to the D/A device.
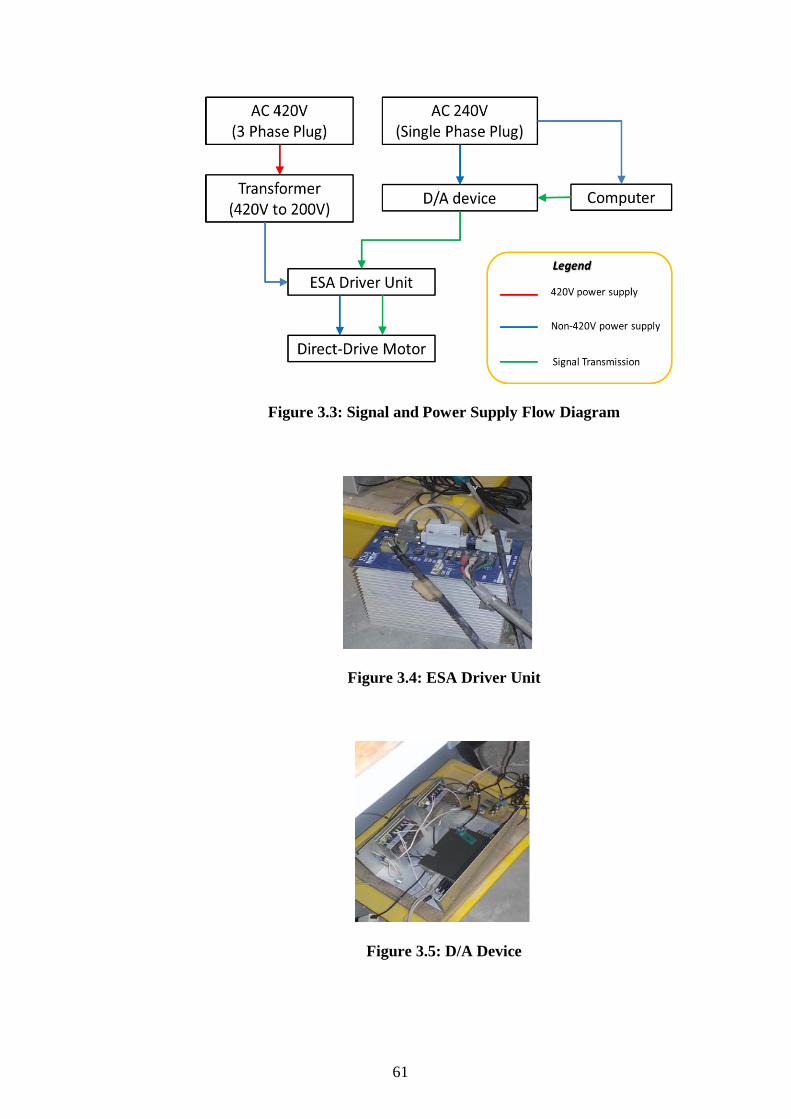
61
Figure 3.3: Signal and Power Supply Flow Diagram
Figure 3.4: ESA Driver Unit
Figure 3.5: D/A Device

62
Figure 3.6 shows the graphical user interface (GUI) of the computer
program, MOTCTLPROG (3DA-GATECTRL), which was used to input the
shaking motions. The computer program was written using Visual Basic for
Applications (VBA) programming code.
Figure 3.6: Graphical User Interface of MOTCTLPROG
The common input frequencies ranged from 0.1 Hz to 20 Hz, while the
input linear displacements ranged from 0.1 to 8 unit of displacement.
However, it was realized that the actual horizontal displacement was not
identical with the numeric value of input displacement. Therefore, it was
required to calibrate and measure the actual horizontal displacement of the
shaking table using device laser displacement sensor.
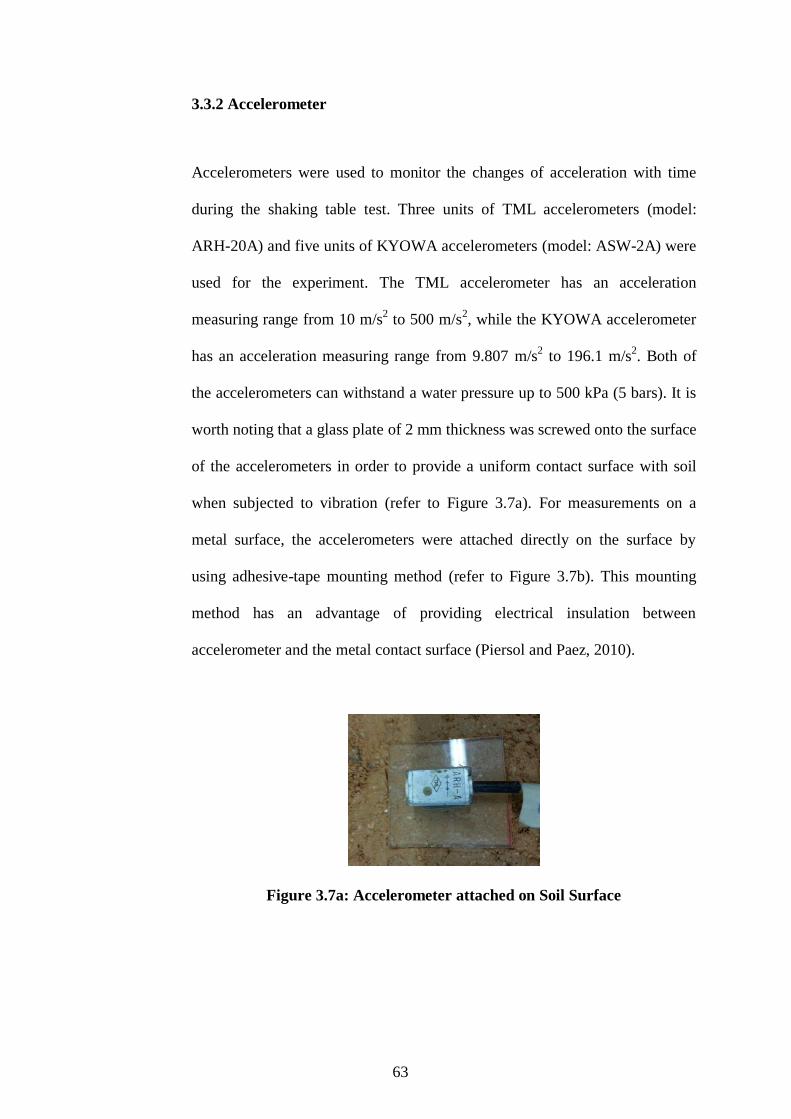
63
3.3.2 Accelerometer
Accelerometers were used to monitor the changes of acceleration with time
during the shaking table test. Three units of TML accelerometers (model:
ARH-20A) and five units of KYOWA accelerometers (model: ASW-2A) were
used for the experiment. The TML accelerometer has an acceleration
measuring range from 10 m/s2 to 500 m/s
2, while the KYOWA accelerometer
has an acceleration measuring range from 9.807 m/s2 to 196.1 m/s
2. Both of
the accelerometers can withstand a water pressure up to 500 kPa (5 bars). It is
worth noting that a glass plate of 2 mm thickness was screwed onto the surface
of the accelerometers in order to provide a uniform contact surface with soil
when subjected to vibration (refer to Figure 3.7a). For measurements on a
metal surface, the accelerometers were attached directly on the surface by
using adhesive-tape mounting method (refer to Figure 3.7b). This mounting
method has an advantage of providing electrical insulation between
accelerometer and the metal contact surface (Piersol and Paez, 2010).
Figure 3.7a: Accelerometer attached on Soil Surface

64
Figure 3.7b: Accelerometer attached on Metal Surface
3.3.3 Laser Displacement Sensor
Laser displacement sensors were utilized to monitor the changes of linear
displacement with time accurately. Within a certain measuring range, this type
of non-destructive device is able to detect the linear displacement directly
without disturbing the test specimen. The model of the laser displacement
sensors used in the present study was OPTEX FA CD5-85, as shown in Figure
3.8. It has a measuring range of 85 ± 20 mm with a measuring resolution of 1
µm and a minimum sampling interval as low as 100 µs.
Figure 3.8: Laser Displacement Sensor Head (CD5-85)
An amplifier/ controller was required to monitor and store the linear
displacement readings digitally (as shown in Figure 3.9). Voltage ranged from

65
12 V to 24 V can be transmitted to the amplifier through a power supply
driver. A USB cable was used to connect the amplifier to a computer in order
to monitor and store the measured data through a GUI software, namely
Sensor Navigation (Figure 3.10).
Figure 3.9: Amplifier
Figure 3.10: Interface of Sensor Navigation
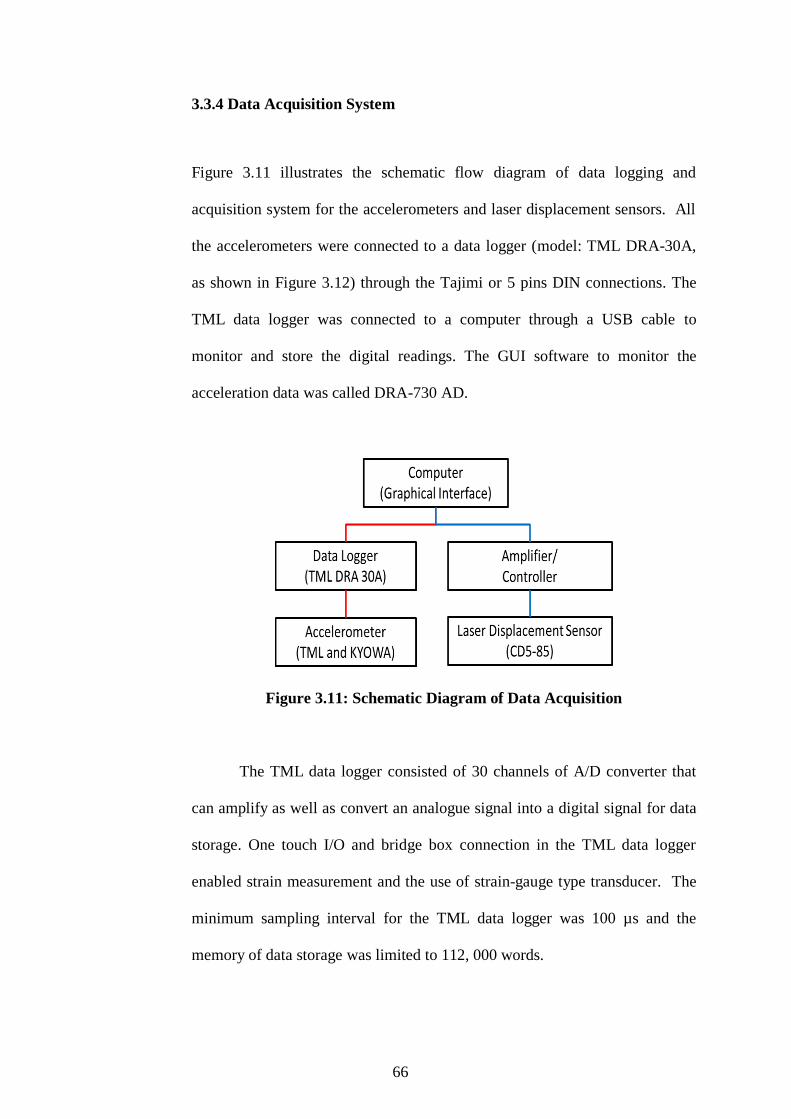
66
3.3.4 Data Acquisition System
Figure 3.11 illustrates the schematic flow diagram of data logging and
acquisition system for the accelerometers and laser displacement sensors. All
the accelerometers were connected to a data logger (model: TML DRA-30A,
as shown in Figure 3.12) through the Tajimi or 5 pins DIN connections. The
TML data logger was connected to a computer through a USB cable to
monitor and store the digital readings. The GUI software to monitor the
acceleration data was called DRA-730 AD.
Figure 3.11: Schematic Diagram of Data Acquisition
The TML data logger consisted of 30 channels of A/D converter that
can amplify as well as convert an analogue signal into a digital signal for data
storage. One touch I/O and bridge box connection in the TML data logger
enabled strain measurement and the use of strain-gauge type transducer. The
minimum sampling interval for the TML data logger was 100 µs and the
memory of data storage was limited to 112, 000 words.

67
Figure 3.12: TML Data Logger (TML DRA-30A)
3.4 Calibration of Devices
3.4.1 Calibration of Shaking Table System
A series of trial tests were first carried out by using a laser displacement
sensor to determine the feasible shaking magnitudes and the consistency of the
input and actual shaking motions of the shaking table. During the trial tests,
two important considerations were taken into account: (1) the movement of
the shaking table must not be significantly affected by noises, and (2) the
movement must be within the measuring range of the laser displacement
sensor. The results of the trial tests are presented in Figure 3.13. The feasible
shaking magnitudes were represented by the shaded zone below the envelope.
Figure 3.13 shows that a shaking magnitude with a high input frequency
should be coupled with a low input displacement, and vice versa. For
instances, a low input shaking frequency of 1 Hz permitted a maximum input
displacement of 2 unit of displacement. However, at an input frequency of 20
Hz, the maximum input displacement was only limited to 0.1 unit of
displacement.
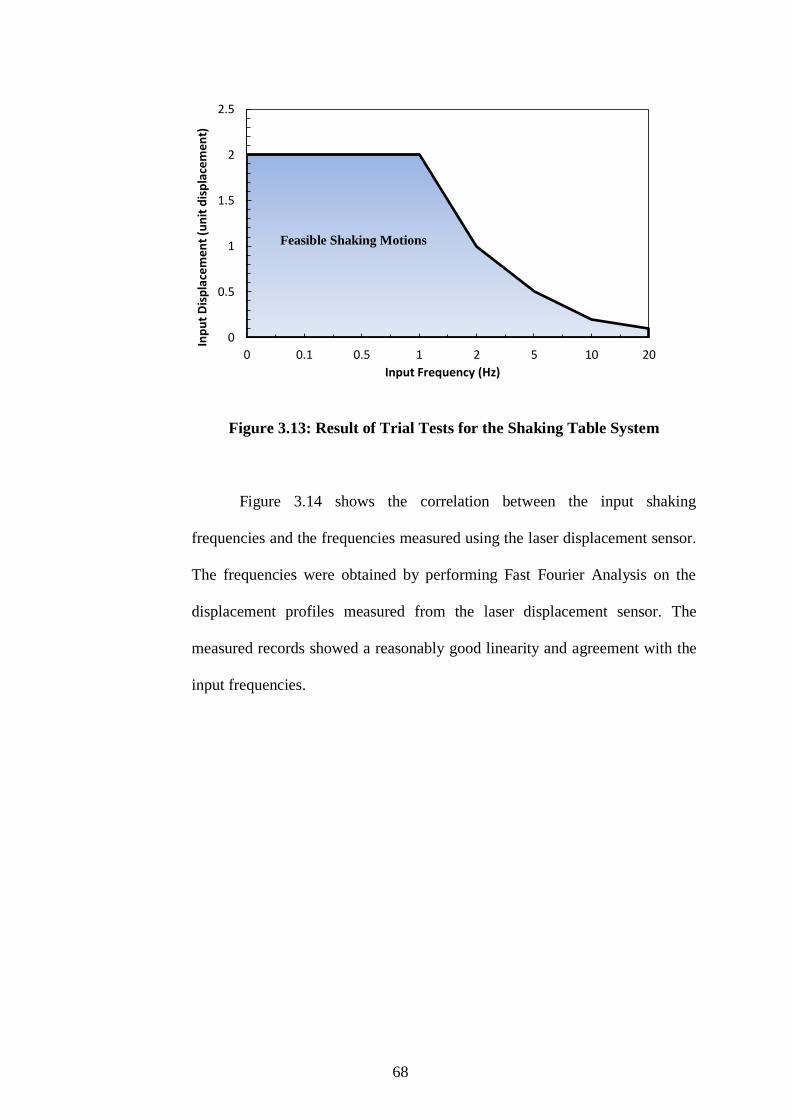
68
Figure 3.13: Result of Trial Tests for the Shaking Table System
Figure 3.14 shows the correlation between the input shaking
frequencies and the frequencies measured using the laser displacement sensor.
The frequencies were obtained by performing Fast Fourier Analysis on the
displacement profiles measured from the laser displacement sensor. The
measured records showed a reasonably good linearity and agreement with the
input frequencies.
0
0.5
1
1.5
2
2.5
0 0.1 0.5 1 2 5 10 20
Inp
ut
Dis
pla
cem
ent
(un
it d
isp
lace
men
t)
Input Frequency (Hz)
Feasible Shaking Motions

69
Figure 3.14: Relationships between Measured and Input Frequencies
Figure 3.15 depicts the relationship between the input displacements
and the displacements measured by using the laser displacement sensor. In
general, the actual displacements were found to be higher than those of input
values. At frequencies of 0.5 – 5 Hz, a good linearity and consistency was
observed in which the measured displacement was about 3.7 times higher than
the input displacement. However, at the high frequency of 5 Hz, the linearity
was only valid up to 0.5 unit of displacement. At an extremely low frequency,
i.e. 0.1 Hz, even though the shaking table was still capable of showing a linear
relationship between the input and measured displacements, the correlation
constant was found to be at 2.4, which was considerably lower than the
constant of 3.7 for other higher input frequencies.
y = 1.0549x R² = 0.9889
0
2
4
6
8
10
12
0 2 4 6 8 10 12
Me
asu
red
Fre
qu
en
cy (
Hz)
Input Frequency (Hz)
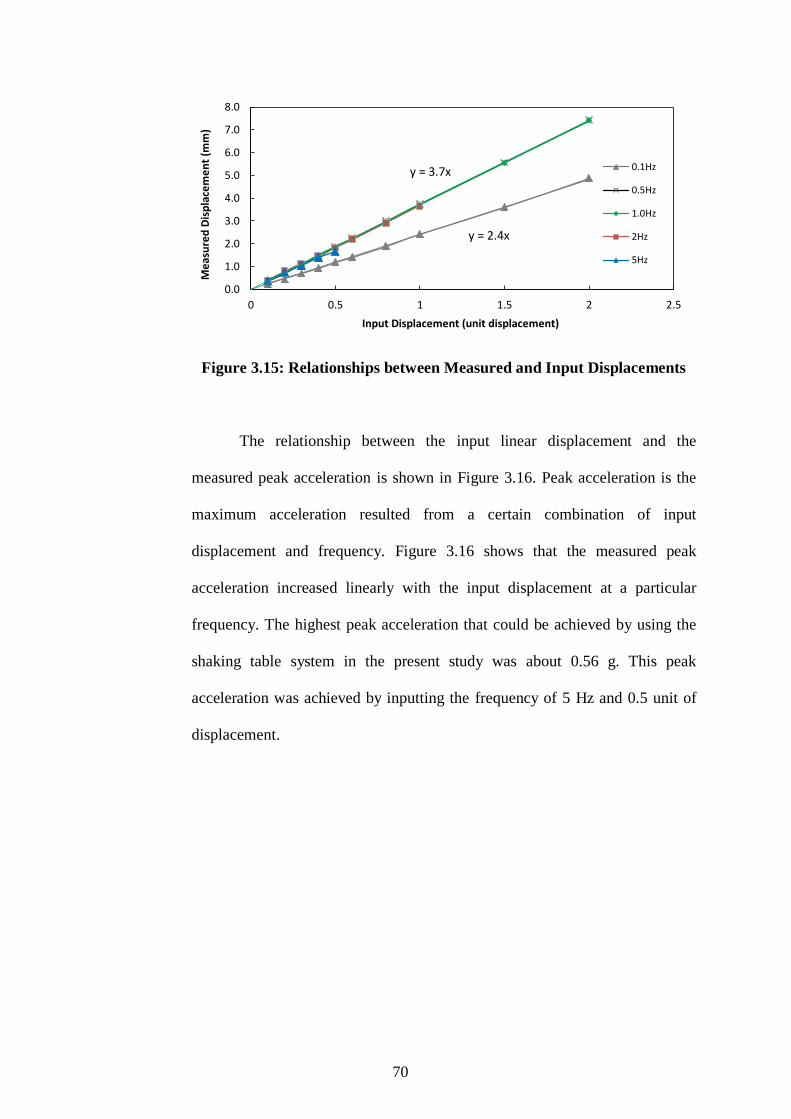
70
Figure 3.15: Relationships between Measured and Input Displacements
The relationship between the input linear displacement and the
measured peak acceleration is shown in Figure 3.16. Peak acceleration is the
maximum acceleration resulted from a certain combination of input
displacement and frequency. Figure 3.16 shows that the measured peak
acceleration increased linearly with the input displacement at a particular
frequency. The highest peak acceleration that could be achieved by using the
shaking table system in the present study was about 0.56 g. This peak
acceleration was achieved by inputting the frequency of 5 Hz and 0.5 unit of
displacement.
y = 2.4x
y = 3.7x
0.0
1.0
2.0
3.0
4.0
5.0
6.0
7.0
8.0
0 0.5 1 1.5 2 2.5
Me
asu
red
Dis
pla
cem
en
t (m
m)
Input Displacement (unit displacement)
0.1Hz
0.5Hz
1.0Hz
2Hz
5Hz

71
Figure 3.16: Relationships between Peak Acceleration and Input
Displacement
3.4.2 Calibration of Accelerometers
There were three calibrated TML accelerometers and five uncalibrated
KYOWA accelerometers used in the present study. A well-calibrated TML
accelerometer (i.e. with a code number of 52144) was used as the benchmark
for calibration of other accelerometers. The calibration of accelerometers was
carried out by correlating the unknown accelerometers with respect to a
calibrated accelerometer. All accelerometers were mounted on the shaking
table and subjected to a series of cyclic movements. Acceleration data (m/s2)
for each accelerometer was computed by multiplying a coefficient with the
recorded output voltage data (mV). For the KYOWA accelerometers, the
initial coefficients were assumed to be 0.018. The calibrated coefficients for
all KYOWA accelerometers were obtained by multiplying the initial
coefficient with improvement ratios, which were the gradients of best-fit linear
lines obtained from relationships between the acceleration data of calibrated
0
1
2
3
4
5
6
0 1 2 3 4 5 6 7 8
Pe
ak A
cce
lera
tio
n (
m/s
2 )
Input Displacement (unit displacement)
0.5Hz 1.0Hz 2.0Hz 5.0Hz
72
TML and KYOWA accelerometers. Table 3.1 summarizes the coefficients of
calibration for each accelerometer.
Table 3.1: Calibration of Accelerometers
Brand Accelerometer
Code Number
Initial
Coefficient
Improvement
Ratio
Calibrated
Coefficient
TML 52144(benchmark) 0.0212 - 0.0212
TML 52145 0.0227 - 0.0227
TML DFC-04062 0.0233 - 0.0233
KYOWA EQ-1590012 0.0180 1.0598 0.0190764
KYOWA EP-5500001 0.0180 1.0900 0.01962
KYOWA EQ-1590010 0.0180 1.1074 0.0199332
KYOWA EQ-1590007 0.0180 1.0900 0.01962
KYOWA EQ-1590008 0.0180 1.0710 0.019278
3.5 Setups of Testing Models
There were three main setups used for the shaking table test including a large
laminar shear box test (LLSBT), a small chamber test with positive air
pressure (SCT) and a small sample test with suction (SSTS). These tests were
carried out on the 1g shaking table and subjected to a series of cyclic
movements. In the following sub-sections, the methodology of each testing
setup will be explained explicitly.
3.5.1 Large Laminar Shear Box Test (LLSBT)
Figure 3.17 and Figure 3.18 show the schematic diagram and the photograph
of the LLSBT model used in the present study. The LLSBT setup consisted of
an aluminium laminar shear box of 1.5 m (length) x 0.7 m (width) x 0.21 m

73
(height), and a surcharge loading applied on top of the soil model to create an
overburden pressure. The soil model was instrumented with accelerometers to
monitor the acceleration during testing. The advantage of the LLSBT was that
the large sample could minimize the boundary effect and give a better
replication of the in-situ soil compared to small laboratory samples (Koo et al.,
2016).
Figure 3.17: Schematic Diagram of LLSBT
Figure 3.18: Experimental Setup for LLSBT

74
There were three layers of aluminium shear stacks used to confine the
soil model, with the height of each stack being 0.07 m. The base of the
aluminium shear stacks was rigidly clamped on the shaking table platform,
and the shear stacks were allowed to move freely relative to each other. This
was made possible by providing sliding joints between the aluminium laminar
shear stacks (as shown in Figure 3.19).
Figure 3.19: Sliding Joints on Aluminium Laminar Shear Stacks
A sheet of 0.3 mm thick rubber membrane was placed inside the
aluminium shear box (Figure 3.20). The functions of the rubber membrane
were to confine the soil model laterally and prevent dissipation of water from
the soil. Since the dimension of the rubber membrane was not available in the
commercial market, it was therefore fabricated in the laboratory using High
Ammonia Latex Concentrate.

75
Figure 3.20: Aluminium Shear Box and Rubber Membrane
For sample preparation, the soil was compacted to 95 % of the
maximum dry density. A wood tamper, which was coated with latex, was
fabricated to compact the soil sample into six successive layers (Figure 3.21).
The interface between soil layers was scratched to minimize heterogeneity in
the compacted layers of soil. Figure 3.22 shows the compacted soil model for
the LLSBT.
Figure 3.21: Compaction of Soil Layer
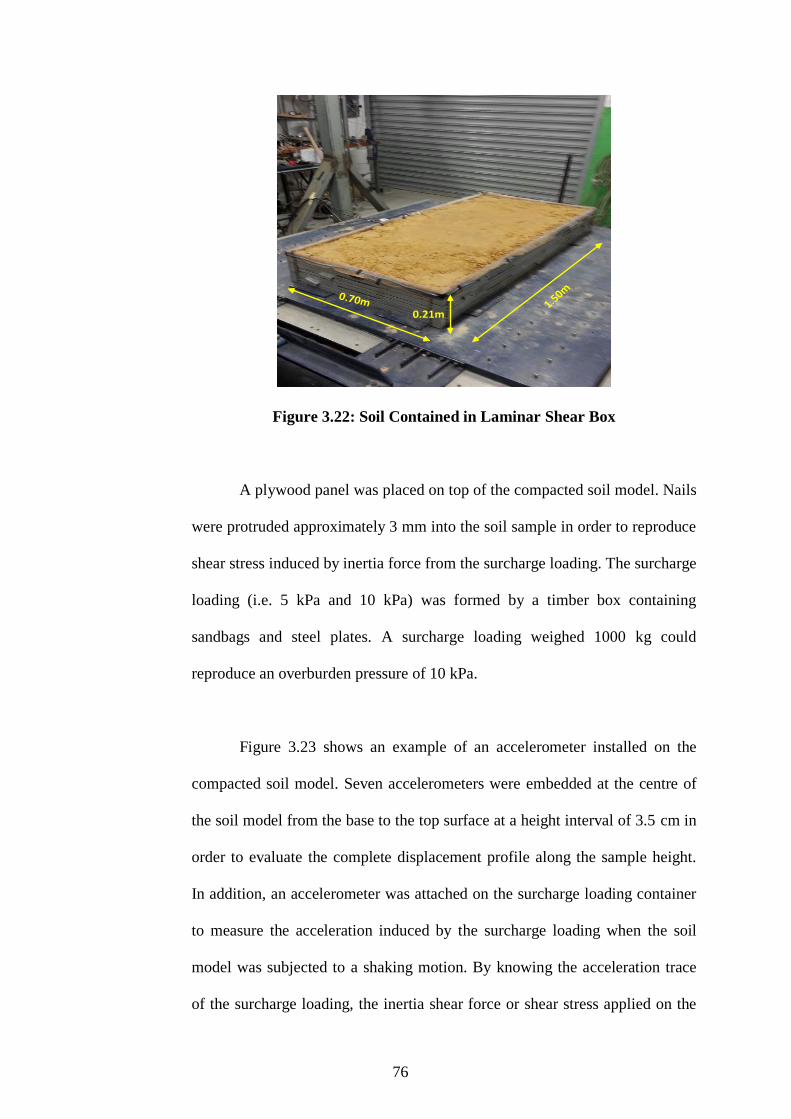
76
0.21m1.5
0m0.70m
Figure 3.22: Soil Contained in Laminar Shear Box
A plywood panel was placed on top of the compacted soil model. Nails
were protruded approximately 3 mm into the soil sample in order to reproduce
shear stress induced by inertia force from the surcharge loading. The surcharge
loading (i.e. 5 kPa and 10 kPa) was formed by a timber box containing
sandbags and steel plates. A surcharge loading weighed 1000 kg could
reproduce an overburden pressure of 10 kPa.
Figure 3.23 shows an example of an accelerometer installed on the
compacted soil model. Seven accelerometers were embedded at the centre of
the soil model from the base to the top surface at a height interval of 3.5 cm in
order to evaluate the complete displacement profile along the sample height.
In addition, an accelerometer was attached on the surcharge loading container
to measure the acceleration induced by the surcharge loading when the soil
model was subjected to a shaking motion. By knowing the acceleration trace
of the surcharge loading, the inertia shear force or shear stress applied on the
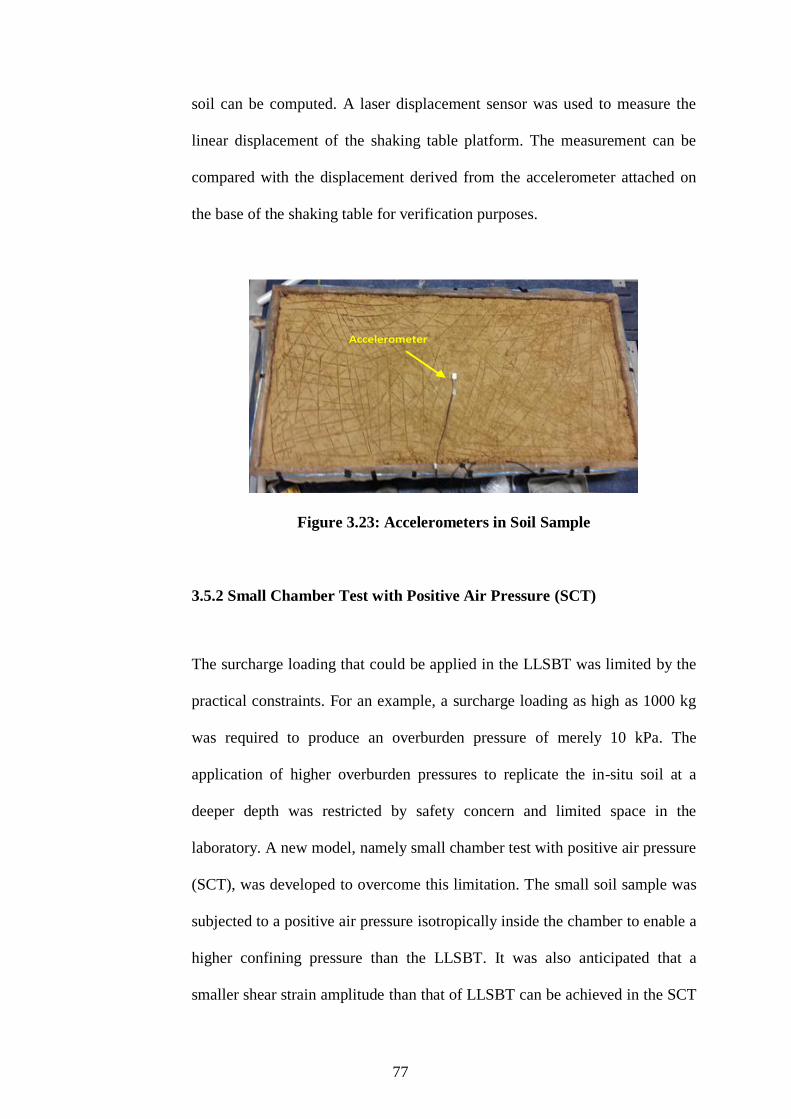
77
soil can be computed. A laser displacement sensor was used to measure the
linear displacement of the shaking table platform. The measurement can be
compared with the displacement derived from the accelerometer attached on
the base of the shaking table for verification purposes.
Accelerometer
Figure 3.23: Accelerometers in Soil Sample
3.5.2 Small Chamber Test with Positive Air Pressure (SCT)
The surcharge loading that could be applied in the LLSBT was limited by the
practical constraints. For an example, a surcharge loading as high as 1000 kg
was required to produce an overburden pressure of merely 10 kPa. The
application of higher overburden pressures to replicate the in-situ soil at a
deeper depth was restricted by safety concern and limited space in the
laboratory. A new model, namely small chamber test with positive air pressure
(SCT), was developed to overcome this limitation. The small soil sample was
subjected to a positive air pressure isotropically inside the chamber to enable a
higher confining pressure than the LLSBT. It was also anticipated that a
smaller shear strain amplitude than that of LLSBT can be achieved in the SCT

78
in order to provide insights into the deformation behaviour of soil over
different strain ranges. Figure 3.24 shows the schematic diagram and the
photograph of the SCT. The small soil sample was radially confined by
confining air pressures of 50 kPa and 100 kPa.
Figure 3.24: Setup of SCT
For sample preparation, the soil was compacted into a cylindrical
mould of 150 mm in diameter and 100 mm in height at an identical density as
that of LLSBT (as shown in Figure 3.25). The soil compaction was done in
four successive layers with the interfaces of soil layers were scratched. A
piece of filter paper was placed at the bottom of soil sample to allow for
drainage when the confining pressure was applied.

79
100 mm
150 mm
Figure 3.25: Compacted Soil Sample
The compacted soil sample was sandwiched by the base pedestal and
the top platen. Numerous pins were attached on the surface of the base and top
plates to facilitate a uniform shear stress distribution between the plates and
soil. The soil sample was confined by a sleeve of pre-fabricated rubber
membrane and tightened by a pair of O-rings at the top and bottom of the
sample. The soil model was then fixed into a PVC cylindrical chamber with an
acrylic plate cover. A thin rubber sheet was placed at the contact surface
between the PVC chamber and the acrylic plate to prevent air leakage. Silicon
grease was also applied to provide a better seal against air leakage.
A pair of accelerometers were attached on the top platen and the base
pedestal, respectively. A laser displacement sensor was also used to measure
the linear displacement of the shaking table platform for verification purposes.
3.5.3 Small Sample Test with Suction (SSTS)
In the SCT, the top and bottom displacements were derived from the
measurement of accelerometers. The derived displacement was, however,
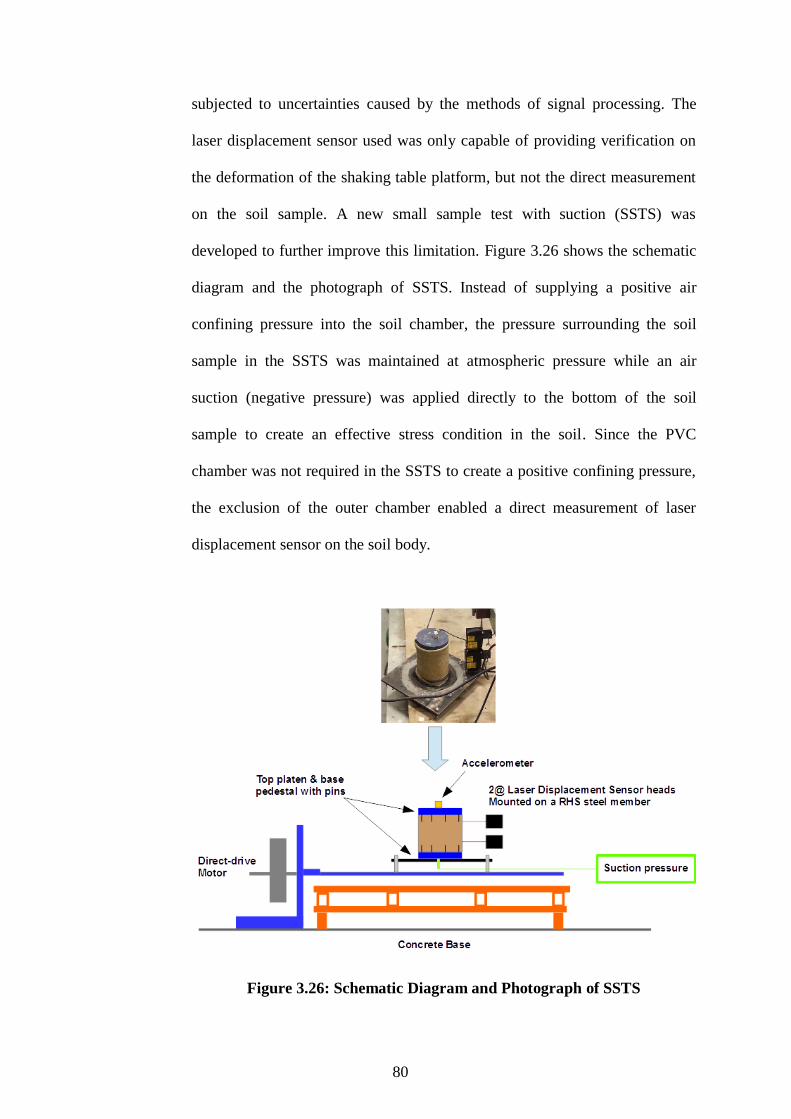
80
subjected to uncertainties caused by the methods of signal processing. The
laser displacement sensor used was only capable of providing verification on
the deformation of the shaking table platform, but not the direct measurement
on the soil sample. A new small sample test with suction (SSTS) was
developed to further improve this limitation. Figure 3.26 shows the schematic
diagram and the photograph of SSTS. Instead of supplying a positive air
confining pressure into the soil chamber, the pressure surrounding the soil
sample in the SSTS was maintained at atmospheric pressure while an air
suction (negative pressure) was applied directly to the bottom of the soil
sample to create an effective stress condition in the soil. Since the PVC
chamber was not required in the SSTS to create a positive confining pressure,
the exclusion of the outer chamber enabled a direct measurement of laser
displacement sensor on the soil body.
Figure 3.26: Schematic Diagram and Photograph of SSTS
81
Two laser displacement sensor heads were required in order to measure
the changes of shear strain profile with time. The suction (i.e. 50 kPa and 80
kPa) was supplied from a convum which was capable of converting a positive
air pressure into suction. It should be noted that the maximum suction that can
be produced was 80 kPa only as limited by the capacity of the convum.
3.6 Testing Parameters
Table 3.2 tabulates the testing parameters involved in the three laboratory
setups, namely LLSBT, SCT and SSTS. There were four main variables
investigated in the present study, i.e. shaking magnitude (i.e. input frequency
and input displacement), effective confining pressure, shear strain amplitude,
and soil type. The input motions applied for the large (LLSBT) and small
sample tests (SCT & SSTS) are summarized in Table 3.3 and Table 3.4,
respectively. It should be noted that different sets of shaking motions were
applied on the large and small sample tests. This was because the LLSBT was
first performed in this study, and hence the shaking motions covering a wide
range of frequencies and displacements were attempted in this preliminary
test. For the subsequent SCT and SSTS, it was intended to focus on the
shaking motions that could give favourable results based on the experience
from the LLSBT. Besides, the input shaking motions of the small sample test
were also constrained by the overall stability of the soil model during the
shaking test due to the slenderness and lighter selfweight of the samples
compared to the LLSBT.
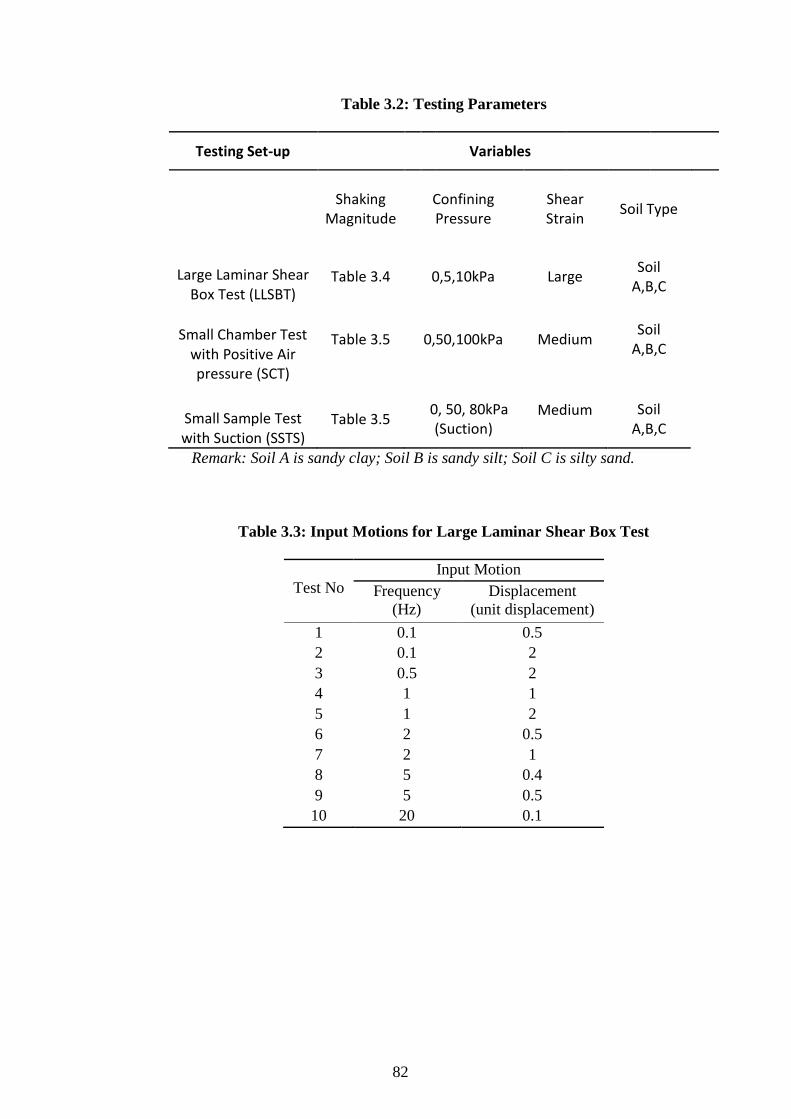
82
Table 3.2: Testing Parameters
Testing Set-up
Variables
Shaking Magnitude
Confining Pressure
Shear Strain
Soil Type
Large Laminar Shear Box Test (LLSBT)
Table 3.4 0,5,10kPa Large Soil
A,B,C
Small Chamber Test with Positive Air pressure (SCT)
Table 3.5
0,50,100kPa
Medium
Soil A,B,C
Small Sample Test with Suction (SSTS)
Table 3.5 0, 50, 80kPa
(Suction) Medium
Soil A,B,C
Remark: Soil A is sandy clay; Soil B is sandy silt; Soil C is silty sand.
Table 3.3: Input Motions for Large Laminar Shear Box Test
Test No
Input Motion
Frequency
(Hz)
Displacement
(unit displacement)
1 0.1 0.5
2 0.1 2
3 0.5 2
4 1 1
5 1 2
6 2 0.5
7 2 1
8 5 0.4
9 5 0.5
10 20 0.1
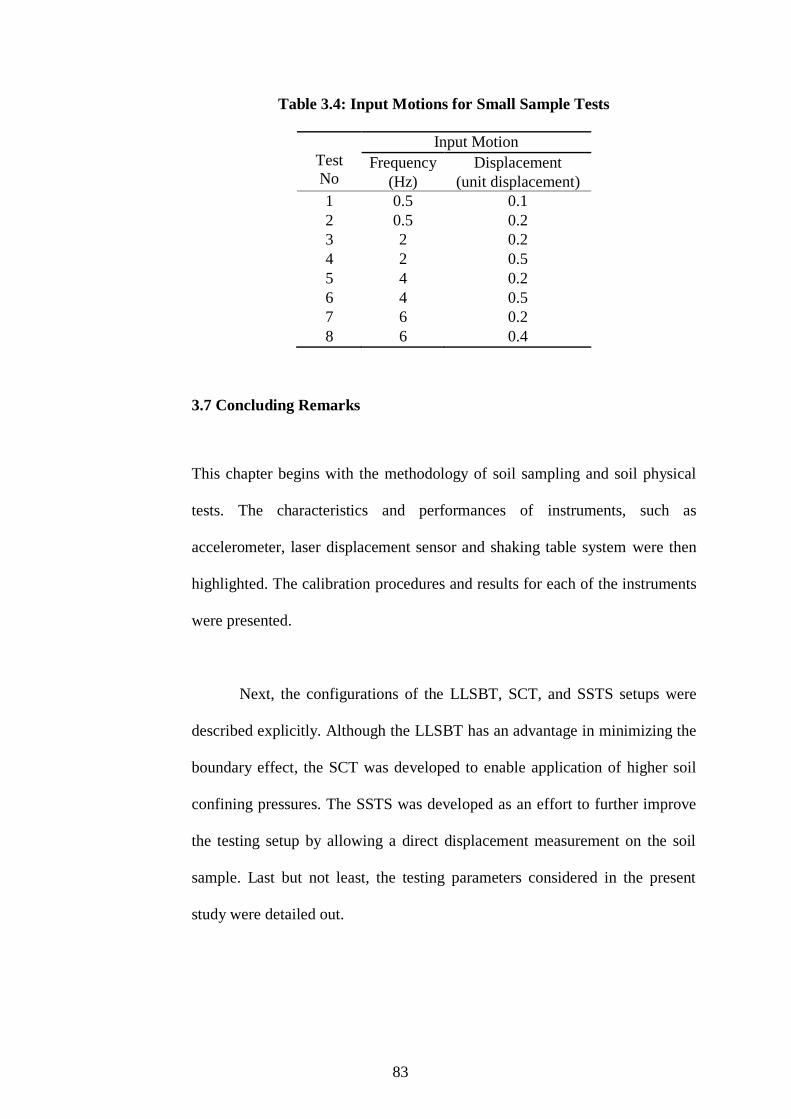
83
Table 3.4: Input Motions for Small Sample Tests
Test
No
Input Motion
Frequency Displacement
(Hz) (unit displacement)
1 0.5 0.1
2 0.5 0.2
3 2 0.2
4 2 0.5
5 4 0.2
6 4 0.5
7 6 0.2
8 6 0.4
3.7 Concluding Remarks
This chapter begins with the methodology of soil sampling and soil physical
tests. The characteristics and performances of instruments, such as
accelerometer, laser displacement sensor and shaking table system were then
highlighted. The calibration procedures and results for each of the instruments
were presented.
Next, the configurations of the LLSBT, SCT, and SSTS setups were
described explicitly. Although the LLSBT has an advantage in minimizing the
boundary effect, the SCT was developed to enable application of higher soil
confining pressures. The SSTS was developed as an effort to further improve
the testing setup by allowing a direct displacement measurement on the soil
sample. Last but not least, the testing parameters considered in the present
study were detailed out.

CHAPTER 4
DATA PROCESSING
4.1 Introduction
Selecting an appropriate methodology in signal processing of acceleration data
is of importance to determine the dynamic properties of soils in a 1g shaking
table test. The dynamic properties are derived from the adjusted acceleration
and linear displacement data. This chapter provides a detailed approach on
choosing an appropriate data processing method for the present research.
4.2 Flowchart in Data Processing
Figure 4.1 depicts the flowchart of data processing. At the beginning, the raw
acceleration and linear displacement readings were measured and digitally
logged in a computer. The acceleration was measured by using an
accelerometer while the linear displacement was monitored by using a laser
displacement sensor. The entire records were subtracted from the mean of the
pre-event data. This procedure could correct the problem caused by DC bias
and it was widely defined as the zeroth-order baseline correction (Boore,
2001). Appropriate signal processing techniques were applied to the data in
order to remove the low and high frequency noises from the actual signal. Last
but not least, a number of parameters (i.e. shear stress, shear strain, secant

85
shear modulus and damping ratio) were computed through established theories
in the literature.
Figure 4.1: Flowchart in Data Processing
4.3 Data Processing Method
Figure 4.2 shows the measured acceleration profiles subjected to different
shaking frequencies (i.e. 2 Hz, 4 Hz, and 6 Hz). To eliminate the effect of DC
bias, the entire acceleration record was normalized with respect to the pre-
event data. Waveforms containing different frequency contents and
background noise effect can be observed in Figure 4.2 clearly.
Data Acquisition
Zeroth-order Baseline Correction
Signal Processing
(Baseline Correction and/or Filtering Method)
Data Analysis
(i.e shear stress, shear strain, shear modulus and damping ratio)
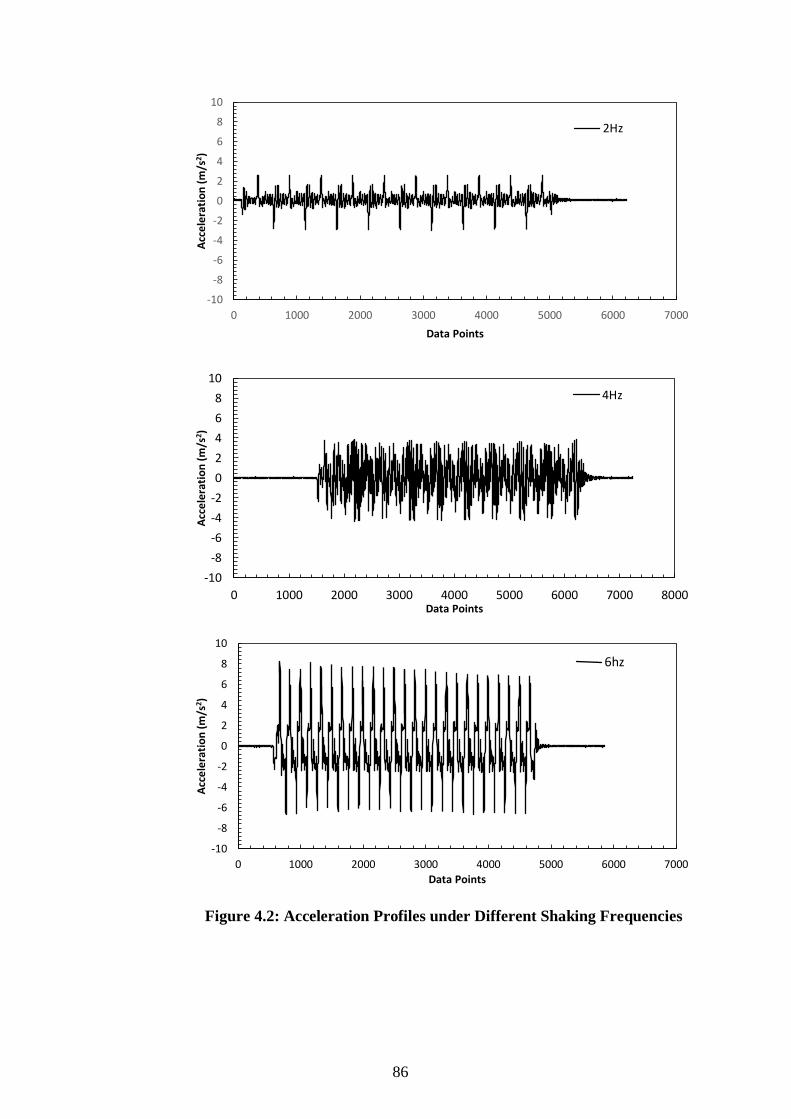
86
Figure 4.2: Acceleration Profiles under Different Shaking Frequencies
-10
-8
-6
-4
-2
0
2
4
6
8
10
0 1000 2000 3000 4000 5000 6000 7000
Acc
ele
rati
on
(m
/s2 )
Data Points
2Hz
-10
-8
-6
-4
-2
0
2
4
6
8
10
0 1000 2000 3000 4000 5000 6000 7000 8000
Acc
ele
rati
on
(m
/s2 )
Data Points
4Hz
-10
-8
-6
-4
-2
0
2
4
6
8
10
0 1000 2000 3000 4000 5000 6000 7000
Acc
ele
rati
on
(m
/s2 )
Data Points
6hz

87
Numerical integration was carried out in order to obtain the
corresponding velocity and displacement profiles. Equations for carrying out
the numerical integration are presented in Eq (4.1) - Eq (4.3). Velocity and
displacement data were obtained through numerical integration of the linearly-
approximated acceleration data points and the assumed initial conditions (i.e.
initial velocity and initial displacement values). It should be noted that the
initial velocity and displacement were assumed to be zero in the computation.
tttt at
t
aata
)( (4.1)
tttt
tt vtaa
v
2 (4.2)
ttttt
tt Dtvtaa
D
2)63
( (4.3)
where
a(t) = acceleration at arbitrary time, s
t = arbitrary time instant, s
at = acceleration at time t, m/s2
at+ Δt = acceleration at time t+ Δt, m/s2
Δt = time interval, s
vt+ Δt = velocity at time t+ Δt, m/s
vt = velocity at time t, m/s
Dt+ Δt = displacement at time t+ Δt, m
Dt = displacement at time t, m
Figure 4.3 and Figure 4.4 present the velocity and displacement time-
series under an actual shaking magnitude of 6 Hz @ 2 mm, respectively. From
a close observation on the acceleration records (Figure 4.2), there was actually
a gradual shift in the baseline. This baseline shift could lead to a significant
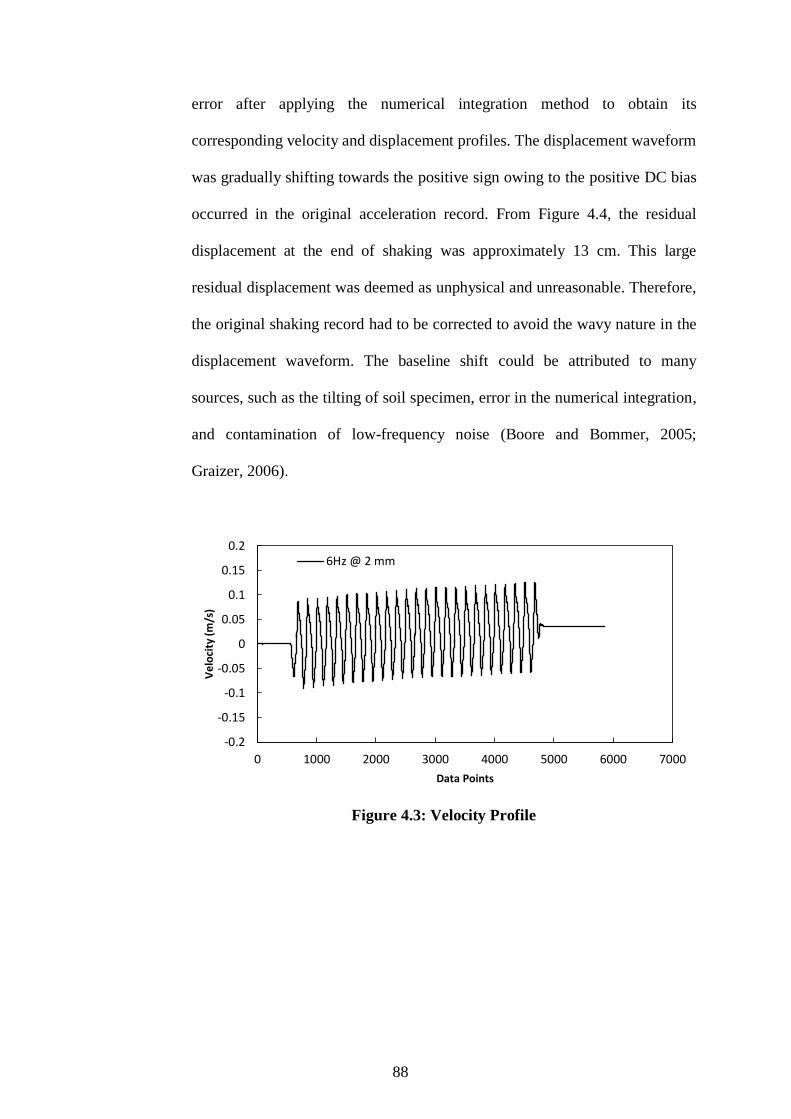
88
error after applying the numerical integration method to obtain its
corresponding velocity and displacement profiles. The displacement waveform
was gradually shifting towards the positive sign owing to the positive DC bias
occurred in the original acceleration record. From Figure 4.4, the residual
displacement at the end of shaking was approximately 13 cm. This large
residual displacement was deemed as unphysical and unreasonable. Therefore,
the original shaking record had to be corrected to avoid the wavy nature in the
displacement waveform. The baseline shift could be attributed to many
sources, such as the tilting of soil specimen, error in the numerical integration,
and contamination of low-frequency noise (Boore and Bommer, 2005;
Graizer, 2006).
Figure 4.3: Velocity Profile
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
0 1000 2000 3000 4000 5000 6000 7000
Ve
loci
ty (
m/s
)
Data Points
6Hz @ 2 mm
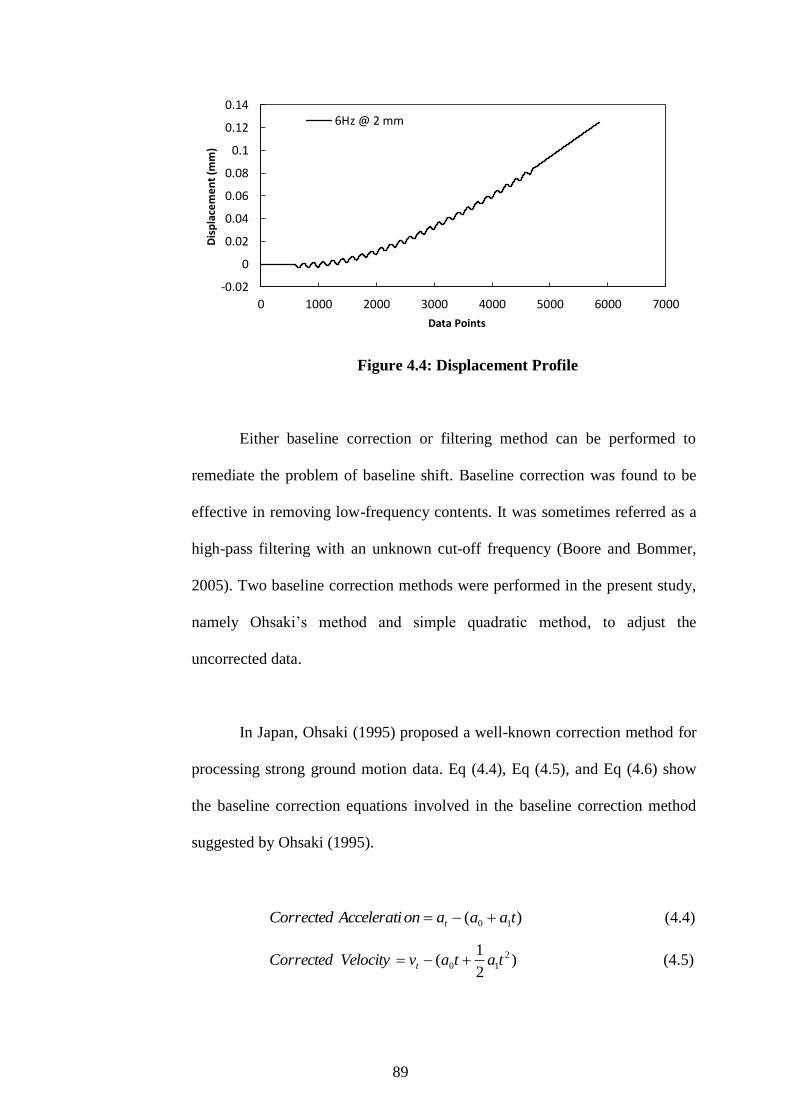
89
Figure 4.4: Displacement Profile
Either baseline correction or filtering method can be performed to
remediate the problem of baseline shift. Baseline correction was found to be
effective in removing low-frequency contents. It was sometimes referred as a
high-pass filtering with an unknown cut-off frequency (Boore and Bommer,
2005). Two baseline correction methods were performed in the present study,
namely Ohsaki’s method and simple quadratic method, to adjust the
uncorrected data.
In Japan, Ohsaki (1995) proposed a well-known correction method for
processing strong ground motion data. Eq (4.4), Eq (4.5), and Eq (4.6) show
the baseline correction equations involved in the baseline correction method
suggested by Ohsaki (1995).
)( 10 taaaonAcceleratiCorrected t (4.4)
)2
1( 2
10 tatavVelocityCorrected t (4.5)
-0.02
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0 1000 2000 3000 4000 5000 6000 7000
Dis
pla
cem
en
t (m
m)
Data Points
6Hz @ 2 mm

90
)6
1
2
1( 3
1
2
0 tataDntDisplacemeCorrected t (4.6)
where
at = acceleration, m/s2
vt = velocity, m/s
Dt = displacement, m
a0, a1 = coefficients
t = time, s
The coefficients of the above equations can be computed based on the
assumptions that velocity will eventually become zero and there is a
reasonable residual displacement at the end of each shaking test. By knowing
the coefficients (i.e. a0 and a1), the equations for baseline correction can be
formed. It follows that the corrected acceleration, velocity and displacement
time-series can be obtained. In the present study, the computation of baseline
correction by Ohsaki (1995)’s method was performed with the aid of a coded
programming language, FORTRAN.
The simple quadratic method was processed by subtracting the entire
acceleration record from a quadratic least-square fitting line prior to the
numerical integration. This approach is widely used in the commercial data
processing programs, i.e. SeismoSignal. The simple quadratic baseline
correction method as adopted in SeismoSignal consists of the following
procedures: (1) determining a quadratic best-fit curve that fits the uncorrected
acceleration time-series through a regression analysis (i.e. quadratic least-
squares fitting), (2) subtracting the original acceleration record from the
established quadratic best-fit function, (3) undertaking numerical integration

91
to determine the velocity and displacement time-series. It is worth mentioning
that the approach adopted in SeismoSignal is not conceptually identical to the
baseline correction methods reported by Boore (2001). Boore (2001) first
identified the step changes in velocity trace and applied a linear or polynomial
best-fit to the velocity record. The raw acceleration data was then subtracted
from the derivative of velocity best-fit function.
Apart from the measurement of acceleration, the laser displacement
sensor was utilised as a direct displacement measurement device for
monitoring the linear displacement over time. During the test, a laser
displacement sensor was positioned near to the shaking table platform so that
the actual displacement at the base of the soil specimen could be monitored. It
was hoped that the actual displacement reading could be used to verify the
displacement derived from the accelerometer, which was mounted on the
shaking table. A suitable correction method could then be decided from the
comparison of the displacement data.
Figure 4.5 shows a series of displacement waveforms obtained from
the laser displacement sensor. The patterns of displacement waveforms
indicated that the shaking table machine can provide a fairly consistent cyclic
movement under different input frequencies and a certain input displacement.
In addition, Fourier Amplitude Spectra of the displacement movements for
LLSBT and SCT are plotted in Figure 4.6. Fast Fourier Transform was
involved in order to obtain the Fourier Amplitude Spectra. As inferred in the
Fourier Amplitude Spectra, the movement of the shaking table was inherently
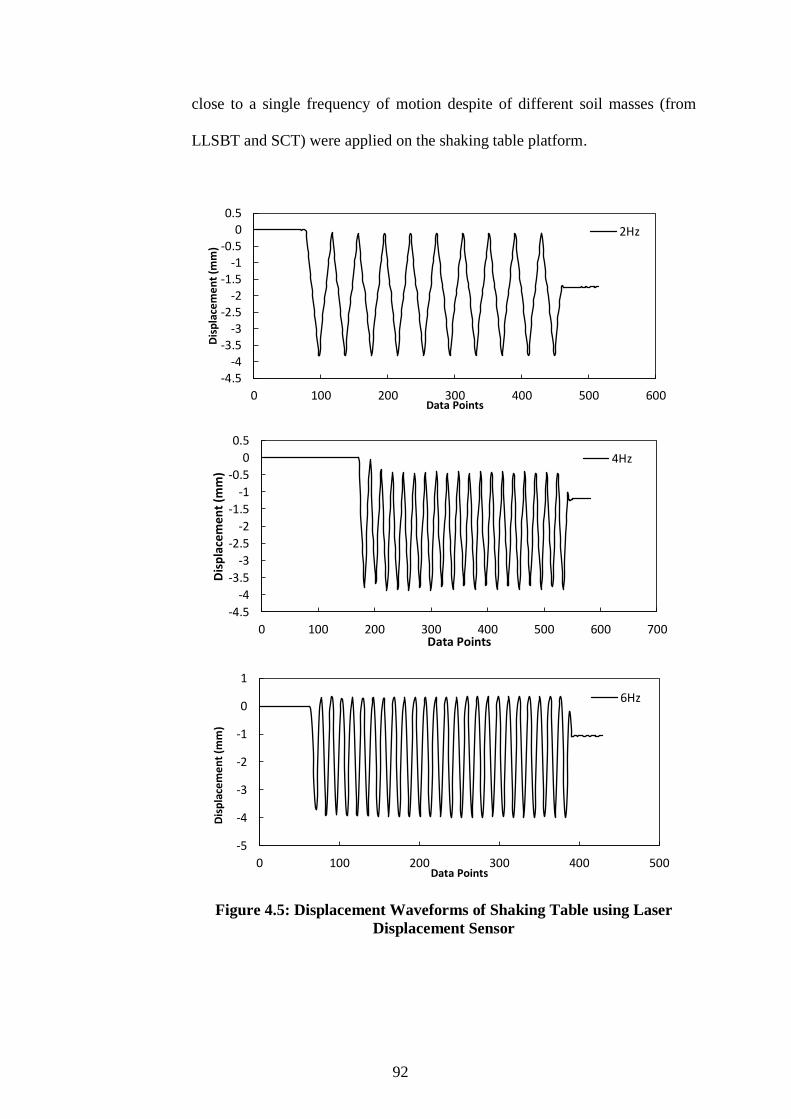
92
close to a single frequency of motion despite of different soil masses (from
LLSBT and SCT) were applied on the shaking table platform.
Figure 4.5: Displacement Waveforms of Shaking Table using Laser
Displacement Sensor
-4.5-4
-3.5-3
-2.5-2
-1.5-1
-0.50
0.5
0 100 200 300 400 500 600
Dis
pla
cem
en
t (m
m)
Data Points
2Hz
-4.5
-4
-3.5
-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
0 100 200 300 400 500 600 700
Dis
pla
cem
ent
(mm
)
Data Points
4Hz
-5
-4
-3
-2
-1
0
1
0 100 200 300 400 500
Dis
pla
cem
en
t (m
m)
Data Points
6Hz
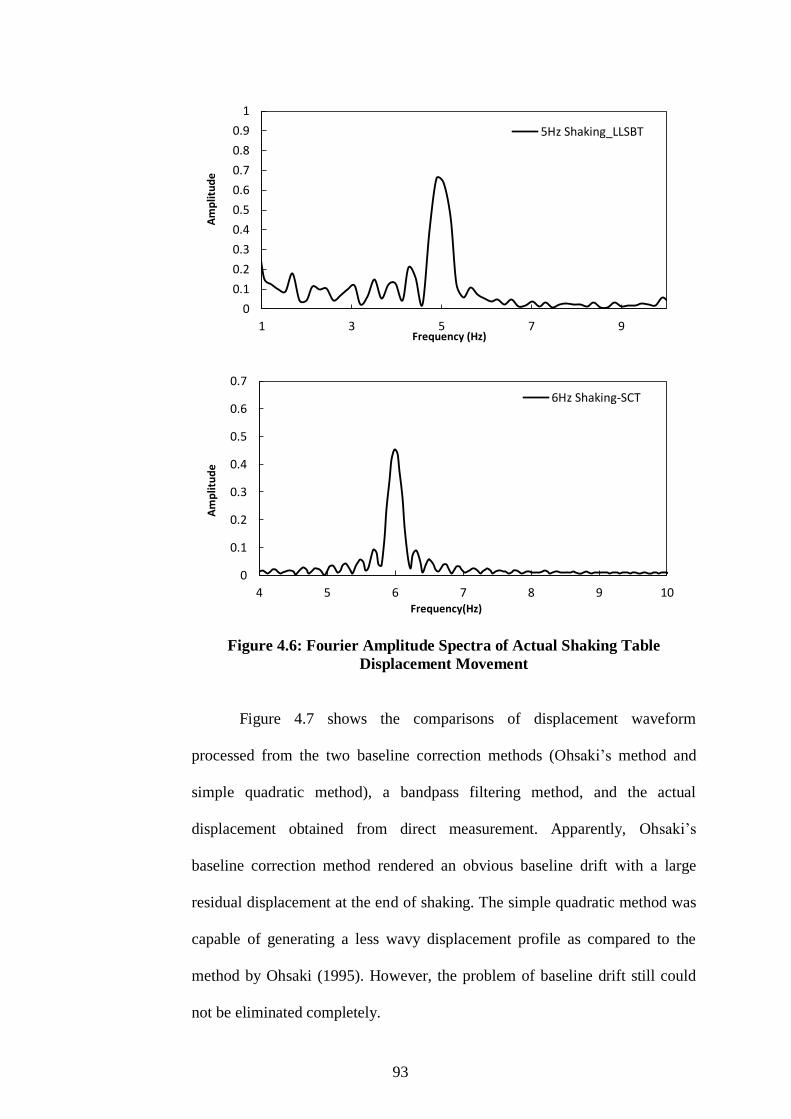
93
Figure 4.6: Fourier Amplitude Spectra of Actual Shaking Table
Displacement Movement
Figure 4.7 shows the comparisons of displacement waveform
processed from the two baseline correction methods (Ohsaki’s method and
simple quadratic method), a bandpass filtering method, and the actual
displacement obtained from direct measurement. Apparently, Ohsaki’s
baseline correction method rendered an obvious baseline drift with a large
residual displacement at the end of shaking. The simple quadratic method was
capable of generating a less wavy displacement profile as compared to the
method by Ohsaki (1995). However, the problem of baseline drift still could
not be eliminated completely.
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
1 3 5 7 9
Am
plit
ud
e
Frequency (Hz)
5Hz Shaking_LLSBT
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
4 5 6 7 8 9 10
Am
plit
ud
e
Frequency(Hz)
6Hz Shaking-SCT

94
Since the baseline-corrected record showed a somewhat wavy nature
of waveform, a high-pass or band-pass filtering was required to remove the
low-frequency and high-frequency unwanted signals. It should be noted that
the computed displacement traces from the accelerometer and the
measurements from the laser displacement sensor were not oscillated about the
same baseline. This was attributed to two standalone data logging systems
used when capturing the data.
Figure 4.7: Comparison of Three Correction Schemes and Laser
Displacement Measurement (6 Hz @ 2 mm)
Figure 4.8 shows the Fourier Amplitude Spectra of shaking table
records for the motion of laser sensor mounting system, ground motion, pre-
event motion, and post-event mean motion under a shaking magnitude of 6 Hz
@ 2 mm. It indicates that the shaking record was contaminated by low-
-0.008
-0.006
-0.004
-0.002
-1E-17
0.002
0.004
0.006
0.008
0.01
0 1 2 3 4 5 6 7
Dis
pla
cem
en
t (m
)
Time Index (s)
Simple Quadratic Baseline Correction
Osaki Baseline Correction
Laser Displacement Sensor
Bandpass Filtering
95
frequency and high-frequency noises. Boore and Bommer (2005) suggested an
approach of selecting a reasonable cut-off frequency in the low-pass filtering.
In the Fourier Amplitude Spectrum plot, the shaking record was compared
with its pre-event or post-event record. A higher frequency cut-off was
decided at a frequency where the signal record to noise ratio was below three.
Douglas and Boore (2010) also reported a detailed approach to choose a cut-
off frequency for high-pass filtering. Besides that, the frequency response of
the accelerometer was 50 Hz which should be taken into account when
selecting an appropriate cut-off frequency. However, the pre-event and post-
event records were unsuitable to be used as model noises when selecting the
cut-off frequencies, especially for the high-pass filtering. The acceleration
records, which were measured on the ground as well as on the laser sensor
mounting system, indicated that the shaking records were affected by the low-
frequency and high-frequency noises. Therefore, the displacement profiles
computed from the acceleration data were inaccurate owing to the
uncertainties in selecting an appropriate cut-off frequency.
In the present study, band-pass 4th-order Butterworth filtering was
attempted in this study. Bandpass filtering approach has been widely applied
in signal processing by many researchers (Brennan et al., 2005; Koga and
Matsuo, 1990). Herein, it was decided to set the amplitude difference between
the displacements obtained from filtering method and laser sensor
measurement to lie within 10 %, as a criterion when choosing a suitable
correction scheme. Slifka (2004) reported a similar criterion except that two
types of errors were introduced, namely standard error and peak error. From
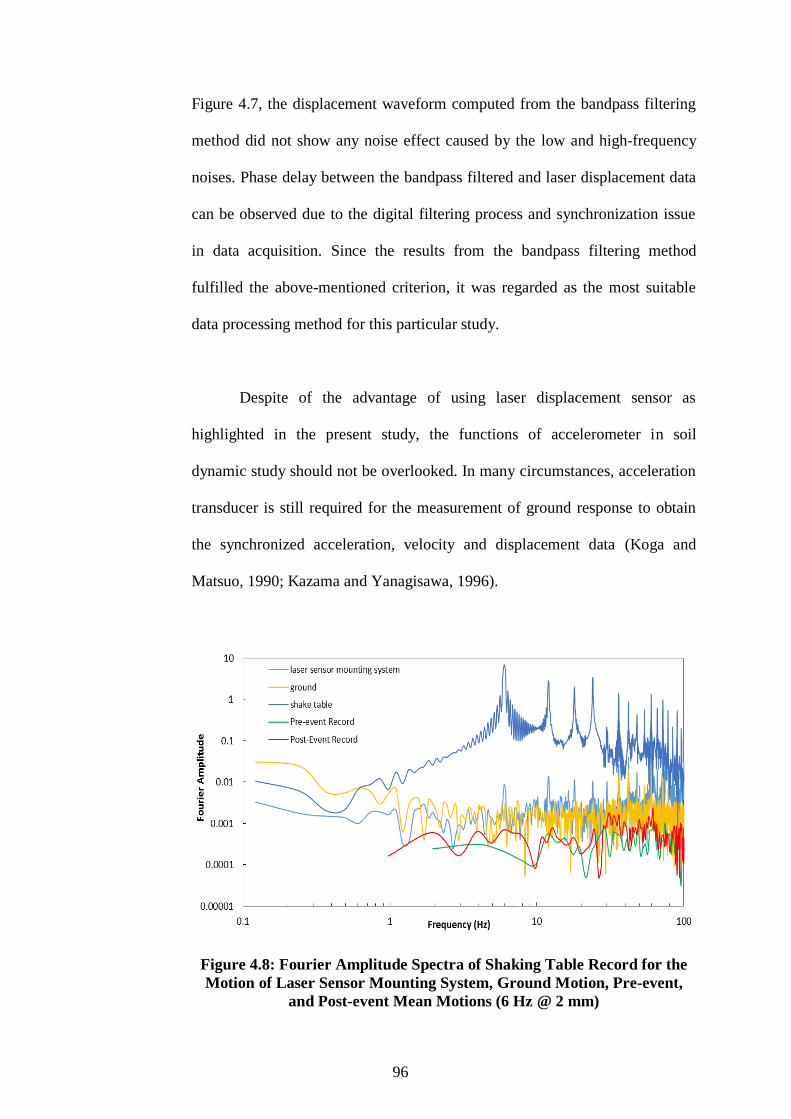
96
Figure 4.7, the displacement waveform computed from the bandpass filtering
method did not show any noise effect caused by the low and high-frequency
noises. Phase delay between the bandpass filtered and laser displacement data
can be observed due to the digital filtering process and synchronization issue
in data acquisition. Since the results from the bandpass filtering method
fulfilled the above-mentioned criterion, it was regarded as the most suitable
data processing method for this particular study.
Despite of the advantage of using laser displacement sensor as
highlighted in the present study, the functions of accelerometer in soil
dynamic study should not be overlooked. In many circumstances, acceleration
transducer is still required for the measurement of ground response to obtain
the synchronized acceleration, velocity and displacement data (Koga and
Matsuo, 1990; Kazama and Yanagisawa, 1996).
Figure 4.8: Fourier Amplitude Spectra of Shaking Table Record for the
Motion of Laser Sensor Mounting System, Ground Motion, Pre-event,
and Post-event Mean Motions (6 Hz @ 2 mm)
97
4.4 Concluding Remarks
In conclusion, this chapter provides a detailed explanation on the approaches
adopted in selecting a suitable data processing method for the soil shaking
table tests. Various methods of data processing were examined and compared.
A laser displacement sensor was used to verify with the computed acceleration
data.
After conducting the shaking table test, the acceleration data was
processed and derived in order to obtain the linear displacement data. The
measured acceleration data was adjusted and numerically integrated. Since the
shaking signal was contaminated by both low and high-frequency noises under
the laboratory testing environment, the bandpass filtering method was finally
chosen as the signal processing method in the present study considering the
movement of the shaking table was pragmatically closed to a single frequency
of motion. The measured data was adjusted by making reference to the records
of laser displacement sensor. The baseline correction, although can eliminate
low-frequency noise, showed a wavy displacement profile containing high-
frequency noise. Despite of the benefits of using laser displacement sensor to
obtain the displacement waveform, accelerometer still served its function in
this study especially under conditions where placement of laser displacement
sensor was practically not viable.

CHAPTER 5
RESULT AND DISCUSSION
5.1 Introduction
This chapter presents the interpretation of experimental findings for the three
selected soils tested on the 1g shaking table in the laboratory. Two tropical
residual soils (i.e. Soil A and Soil B) and the sand mining trail (i.e. Soil C)
were tested by using three different types of experimental setup including
LLSBT, SCT, and SSTS. The measured acceleration data were processed
through the digital band-pass filtering and numerical integration methods.
Subsequently, shear strain profiles, shear stress profiles, and hysteresis loops
were obtained. Two important dynamic properties, namely secant shear
moduli and damping ratios, were determined from a series of hysteresis loops.
The results of dynamic properties were compared with the findings reported in
the literature. In addition, the effects of various parameters (e.g. confining
pressure, plasticity index, shear strain amplitude, and types of soil) on the soil
dynamic properties were investigated explicitly in the present study.
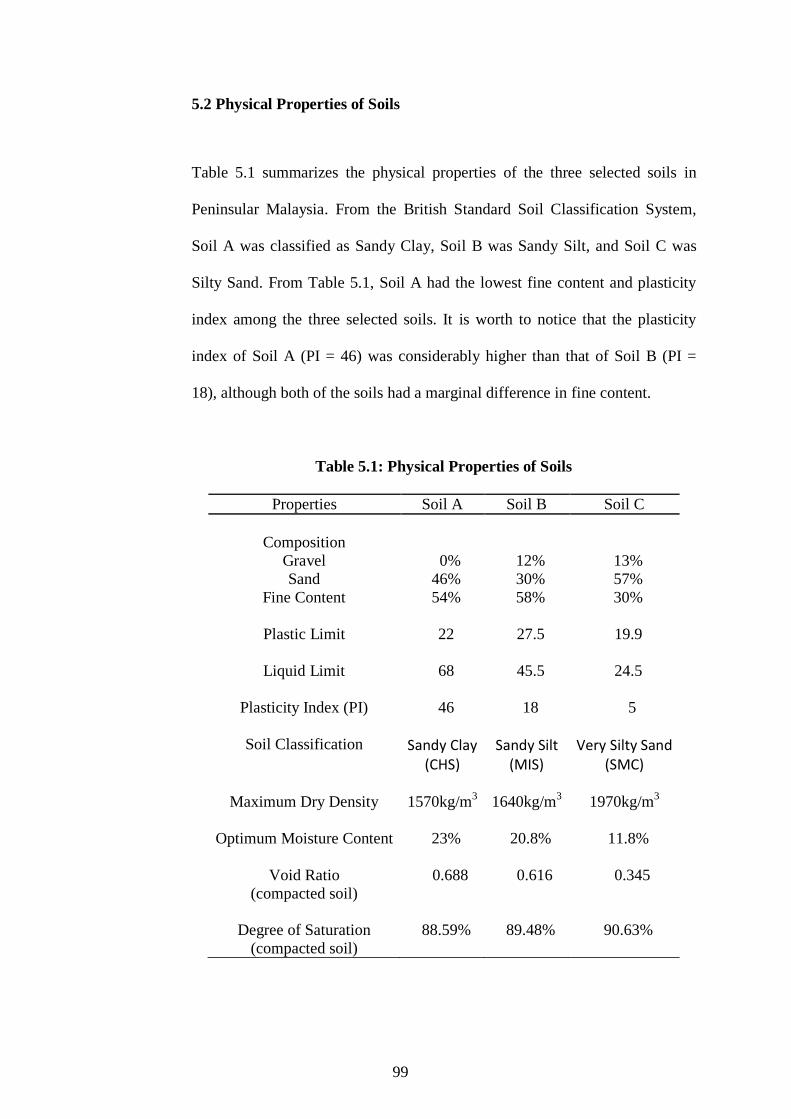
99
5.2 Physical Properties of Soils
Table 5.1 summarizes the physical properties of the three selected soils in
Peninsular Malaysia. From the British Standard Soil Classification System,
Soil A was classified as Sandy Clay, Soil B was Sandy Silt, and Soil C was
Silty Sand. From Table 5.1, Soil A had the lowest fine content and plasticity
index among the three selected soils. It is worth to notice that the plasticity
index of Soil A (PI = 46) was considerably higher than that of Soil B (PI =
18), although both of the soils had a marginal difference in fine content.
Table 5.1: Physical Properties of Soils
Properties Soil A Soil B Soil C
Composition
Gravel 0% 12% 13%
Sand 46% 30% 57%
Fine Content 54% 58% 30%
Plastic Limit
22 27.5 19.9
Liquid Limit
68 45.5 24.5
Plasticity Index (PI)
46 18 5
Soil Classification
Sandy Clay
(CHS)
Sandy Silt (MIS)
Very Silty Sand
(SMC)
Maximum Dry Density
1570kg/m3
1640kg/m3 1970kg/m
3
Optimum Moisture Content
23% 20.8% 11.8%
Void Ratio
(compacted soil)
0.688 0.616 0.345
Degree of Saturation
(compacted soil)
88.59% 89.48% 90.63%

100
5.3 Analysis of Experimental Data
This section covers the analyses of experimental data for LLSBT, SCT, and
SSTS, respectively. In the data processing stage, the uncorrected acceleration
data have been processed to eliminate the noise and baseline drift. The
adjusted acceleration and displacement data were used to analyse the dynamic
properties of soil i.e. secant shear modulus and damping ratio.
5.3.1 Analysis of Large Laminar Shear Box Test (LLSBT)
A shaking record of Soil A, with a shaking magnitude of 5 Hz @ 2.0 mm (i.e.
frequency of 5 Hz and single amplitude displacement of 2.0 mm) and
subjected to an overburden pressure of 10 kPa, was used as an example to
describe the results of data analysis using the LLSBT. Figure 5.1 depicts the
filtered acceleration profiles along the height of the soil model as well as on
the surcharge loading. At the base, the peak acceleration was approximately
0.2 g. Besides, the acceleration response on the surcharge loading (about 2.9
g) was significantly higher than the acceleration response in the soil model
(about 1.5 g – 2.0 g).

101
(a)
(b)
(c)
-5
-3
-1
1
3
5
0 1 2 3 4 5
Acc
eler
atio
n (
m/s
2)
Time (s)
Elevation: Base
-5
-3
-1
1
3
5
0 1 2 3 4 5
Acc
eler
atio
n (
m/s
2)
Time (s)
Elevation: 3.5cm
-5
-3
-1
1
3
5
0 1 2 3 4 5
Acc
eler
atio
n (
m/s
2)
Time (s)
Elevation: 7cm

102
(d)
(e)
(f)
Figure 5.1: Filtered Acceleration Profiles along the Height of Soil Model
-5
-3
-1
1
3
5
0 1 2 3 4 5
Acc
eler
atio
n (
m/s
2)
Time (s)
Elevation: 14cm
-5
-3
-1
1
3
5
0 1 2 3 4 5
Acc
eler
atio
n (
m/s
2)
Time (s)
Elevation: 21cm
-5
-3
-1
1
3
5
0 1 2 3 4 5
Acc
eler
atio
n (
m/s
2)
Time (s)
on Surchage Loading

103
Figure 5.2 shows the displacement profiles along the height of the soil
model. The filtered acceleration data (referred to Figure 5.1) were derived by
using the numerical integration method to obtain the displacement profiles.
The configuration of displacement profiles showed that the soil movements
were uniform and responded cyclically during the shaking table test. For this
example, the double amplitude of each displacement profile was nearly 0.004
m or 4 mm.
(a)
(b)
-0.003
-0.002
-0.001
0
0.001
0.002
0.003
0 1 2 3 4 5
Dis
pla
cem
ent
(m)
Time (s)
Elevation=Base
-0.003
-0.002
-0.001
0
0.001
0.002
0.003
0 1 2 3 4 5
Dis
pla
cem
ent
(m)
Time (s)
Elevation= 7cm

104
(c)
(d)
(e)
Figure 5.2: Filtered Displacement Profiles along the Height of Soil Model
-0.003
-0.002
-0.001
0
0.001
0.002
0.003
0 1 2 3 4 5
Dis
pla
cem
ent
(m)
Time (s)
Elevation= 10.5cm
-0.003
-0.002
-0.001
0
0.001
0.002
0.003
0 1 2 3 4 5
Dis
pla
cem
ent
(m)
Time (s)
Elevation= 14cm
-0.003
-0.002
-0.001
0
0.001
0.002
0.003
0 1 2 3 4 5
Dis
pla
cem
ent
(m)
Time (s)
Elevation= 21cm

105
Two monitoring points at different elevations along the same vertical
axis in the soil model were selected for verifying the occurrence of simple
shear deformation and the uniformity of shear strain profiles. Figure 5.3
depicts the displacement profiles at different elevations of the soil model
within a certain time frame. Figure 5.4 shows the displacement profiles at the
elevations of 3.5 cm and 10.5 cm, respectively. It shows that the displacement
at the elevation of 10.5 cm was greater than that of 3.5 cm and simple shear
deformation was distinguishable. The inertia shear stress applied on the top
surface of the soil at 10.5 cm was believed to have developed between the two
successive soil layers (3.5 cm – 10.5 cm) and that could represent the soil
condition below the ground surface. Besides, Figure 5.5 shows that the shear
strain profile at elevation interval of 3.5 cm – 10.5 cm was fairly uniform
compared to other intervals. Therefore the elevation interval of 3.5 cm – 10.5
cm was selected to determine the subsequent secant shear modulus and
damping ratio.

106
Figure 5.3: Displacement Profiles at Different Elevations
Figure 5.4: Comparison of Displacement Profiles between Elevations of
3.5 cm and 10.5 cm
-0.0025
-0.002
-0.0015
-0.001
-0.0005
0
0.0005
0.001
0.0015
0.002
0.0025
2.45 2.5 2.55 2.6 2.65 2.7 2.75 2.8
Dis
pla
cem
ent
(m)
Time (s)
Base
Elevation: 3.5cm
Elevation:7cm
Elevation: 10.5cm
Elevation: 14cm
Elevation: 17.5cm
Elevation: 21cm
-0.0025
-0.002
-0.0015
-0.001
-0.0005
0
0.0005
0.001
0.0015
0.002
0.0025
2 2.1 2.2 2.3 2.4 2.5 2.6
Dis
pla
cem
ent
(m)
Time (s)
Elevation=3.5cm
Elevation=10.5cm
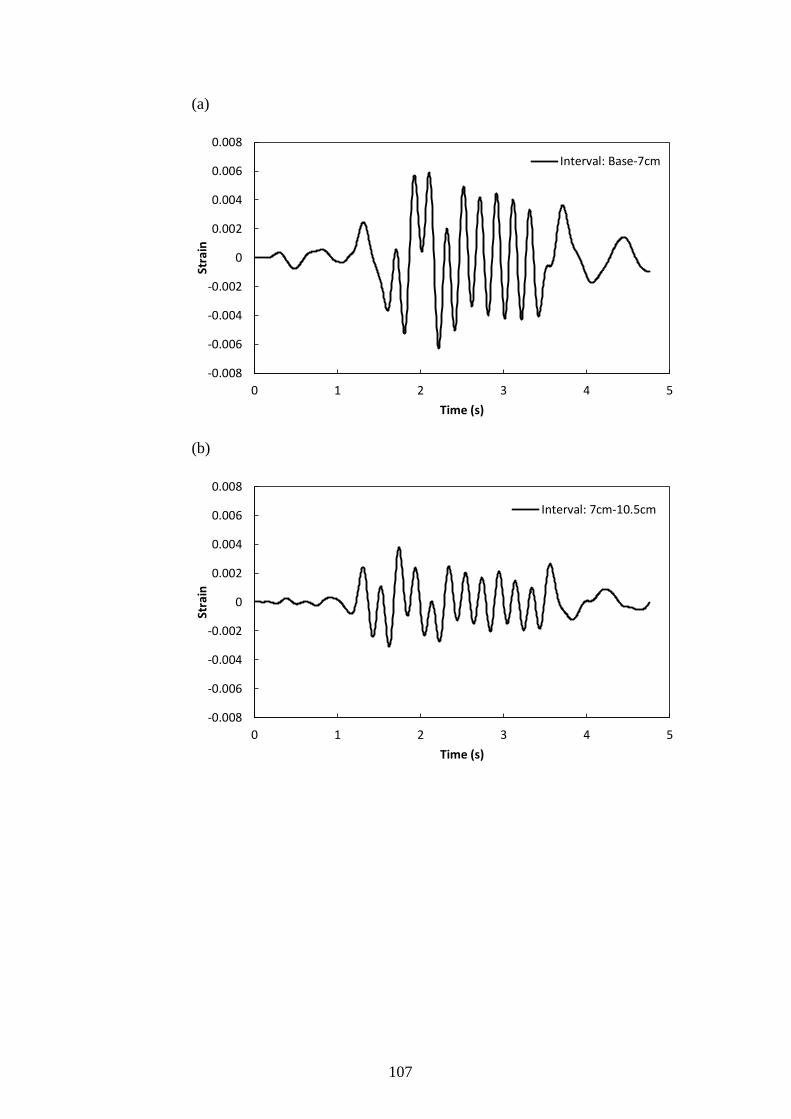
107
(a)
(b)
-0.008
-0.006
-0.004
-0.002
0
0.002
0.004
0.006
0.008
0 1 2 3 4 5
Stra
in
Time (s)
Interval: Base-7cm
-0.008
-0.006
-0.004
-0.002
0
0.002
0.004
0.006
0.008
0 1 2 3 4 5
Stra
in
Time (s)
Interval: 7cm-10.5cm

108
(c)
(d)
Figure 5.5: Shear Strain Profiles along Different Elevation Intervals of
Soil Model
The shear stress developed on the top surface of the elevation 10.5 cm
was computed by taking into account of the inertia shear stresses from the
overburden soil and the inertia shear stress induced by the surcharge loading
(Figure 5.6). The inertia shear stress of each soil layer is the integral product
-0.008
-0.006
-0.004
-0.002
0
0.002
0.004
0.006
0.008
0 1 2 3 4 5
Stra
in
Time (s)
Interval: 3.5cm-10.5cm
-0.008
-0.006
-0.004
-0.002
0
0.002
0.004
0.006
0.008
0 1 2 3 4 5
Stra
in
Time (s)
Interval: 7cm-21cm

109
of soil density and average acceleration developed in each of the soil layer
(Kazama et al., 1996).
Figure 5.6: Shear Stress Profile on the Top Surface at the Elevation 10.5
cm
Figure 5.7 shows a sample of single-cycle hysteresis loop to represent
the response of cyclic movement at the selected elevation. The enclosed loop
area represents the work done in the system and the slope indicates the shear
modulus of soil (Brennan et al., 2005).
-3
-2
-1
0
1
2
3
0 1 2 3 4 5
Stre
ss (
kPa)
Time (s)
Shear Stress on Soil Interval
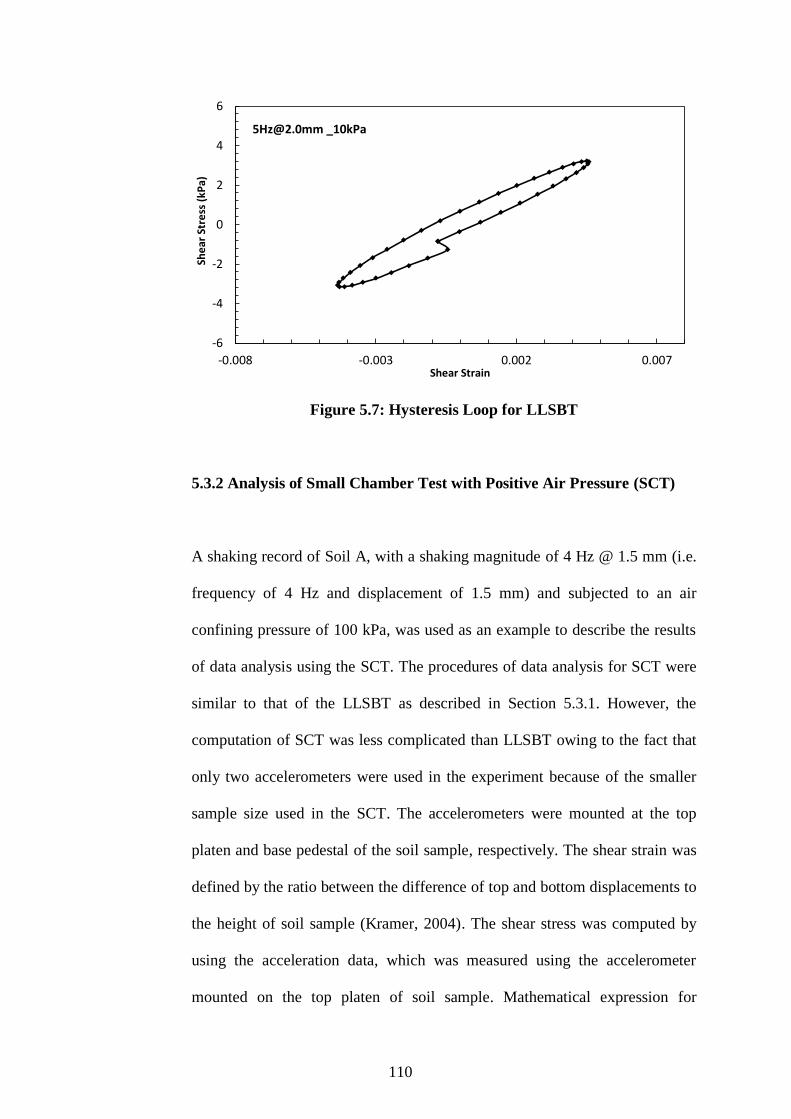
110
Figure 5.7: Hysteresis Loop for LLSBT
5.3.2 Analysis of Small Chamber Test with Positive Air Pressure (SCT)
A shaking record of Soil A, with a shaking magnitude of 4 Hz @ 1.5 mm (i.e.
frequency of 4 Hz and displacement of 1.5 mm) and subjected to an air
confining pressure of 100 kPa, was used as an example to describe the results
of data analysis using the SCT. The procedures of data analysis for SCT were
similar to that of the LLSBT as described in Section 5.3.1. However, the
computation of SCT was less complicated than LLSBT owing to the fact that
only two accelerometers were used in the experiment because of the smaller
sample size used in the SCT. The accelerometers were mounted at the top
platen and base pedestal of the soil sample, respectively. The shear strain was
defined by the ratio between the difference of top and bottom displacements to
the height of soil sample (Kramer, 2004). The shear stress was computed by
using the acceleration data, which was measured using the accelerometer
mounted on the top platen of soil sample. Mathematical expression for
-6
-4
-2
0
2
4
6
-0.008 -0.003 0.002 0.007
She
ar S
tre
ss (
kPa)
Shear Strain
[email protected] _10kPa
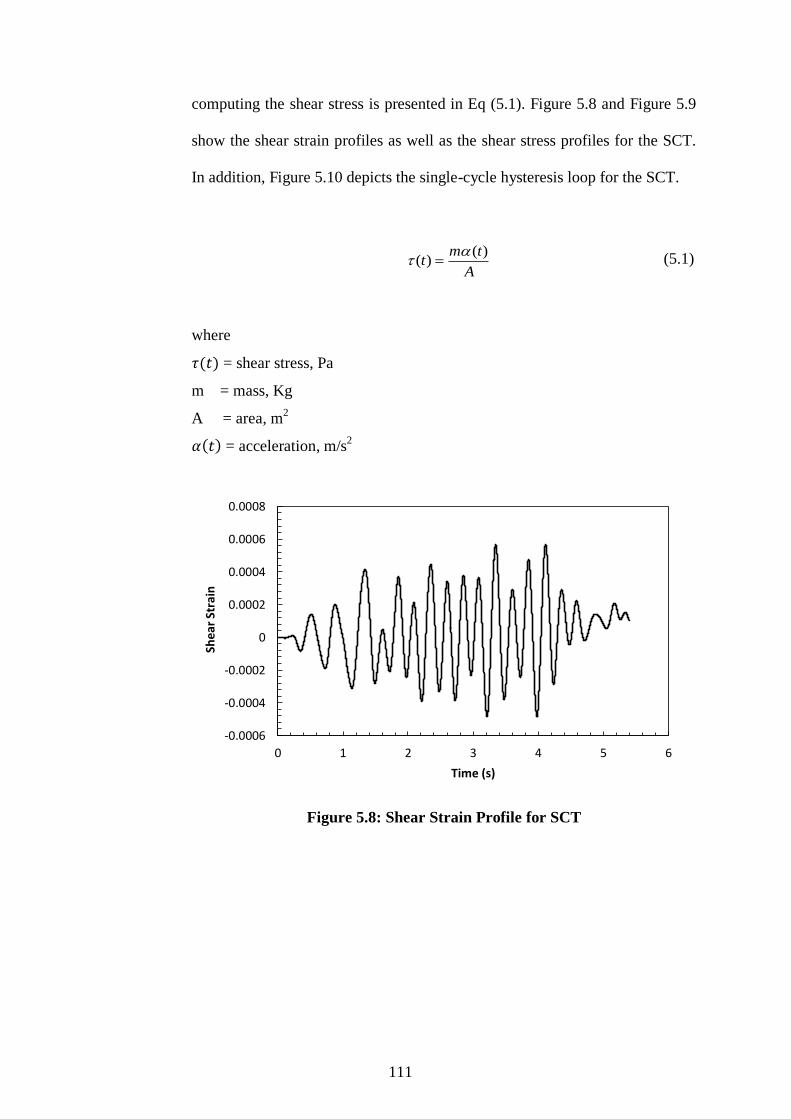
111
computing the shear stress is presented in Eq (5.1). Figure 5.8 and Figure 5.9
show the shear strain profiles as well as the shear stress profiles for the SCT.
In addition, Figure 5.10 depicts the single-cycle hysteresis loop for the SCT.
A
tmt
)()(
(5.1)
where
𝜏(𝑡) = shear stress, Pa
m = mass, Kg
A = area, m2
𝛼(𝑡) = acceleration, m/s2
Figure 5.8: Shear Strain Profile for SCT
-0.0006
-0.0004
-0.0002
0
0.0002
0.0004
0.0006
0.0008
0 1 2 3 4 5 6
Shea
r St
rain
Time (s)
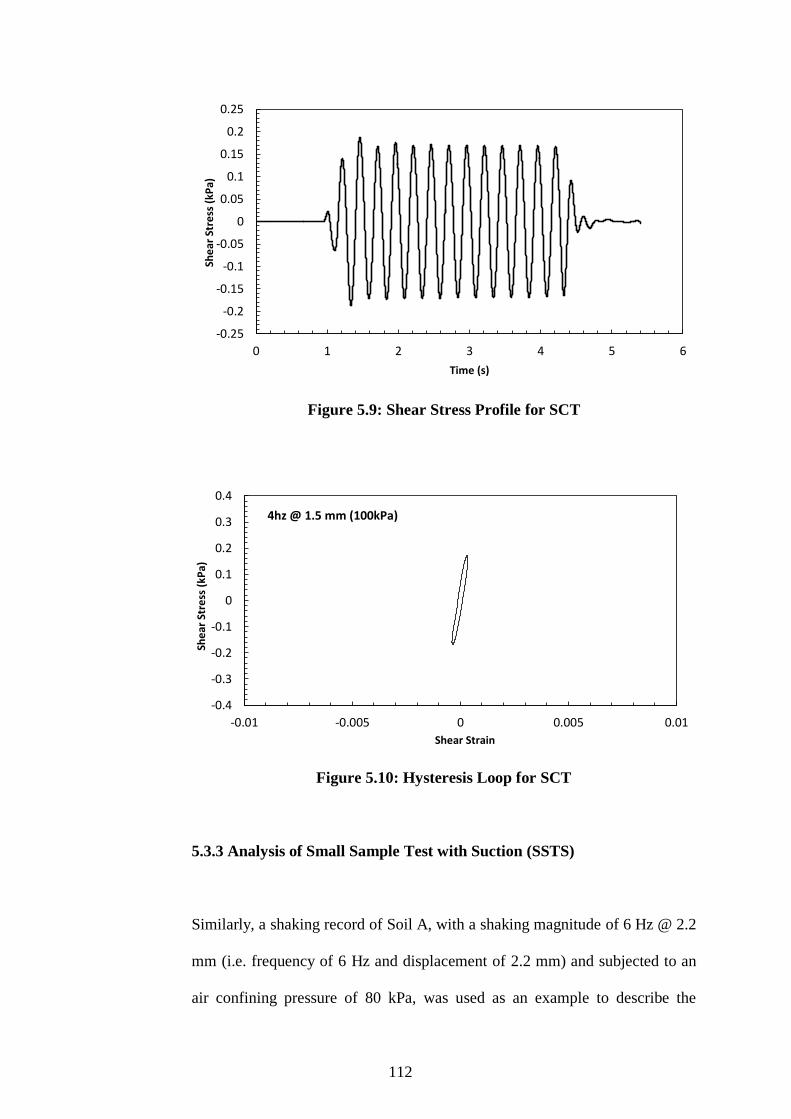
112
Figure 5.9: Shear Stress Profile for SCT
Figure 5.10: Hysteresis Loop for SCT
5.3.3 Analysis of Small Sample Test with Suction (SSTS)
Similarly, a shaking record of Soil A, with a shaking magnitude of 6 Hz @ 2.2
mm (i.e. frequency of 6 Hz and displacement of 2.2 mm) and subjected to an
air confining pressure of 80 kPa, was used as an example to describe the
-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
0 1 2 3 4 5 6
She
ar S
tre
ss (
kPa)
Time (s)
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
-0.01 -0.005 0 0.005 0.01
She
ar S
tre
ss (
kPa)
Shear Strain
4hz @ 1.5 mm (100kPa)
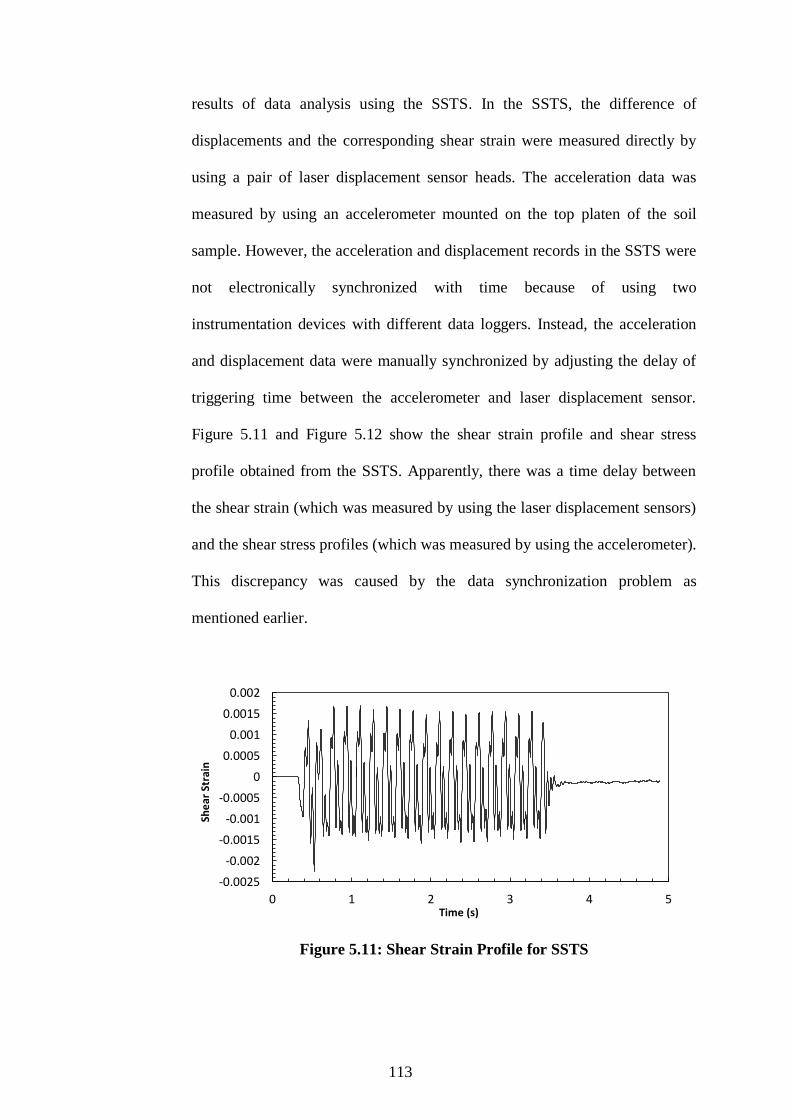
113
results of data analysis using the SSTS. In the SSTS, the difference of
displacements and the corresponding shear strain were measured directly by
using a pair of laser displacement sensor heads. The acceleration data was
measured by using an accelerometer mounted on the top platen of the soil
sample. However, the acceleration and displacement records in the SSTS were
not electronically synchronized with time because of using two
instrumentation devices with different data loggers. Instead, the acceleration
and displacement data were manually synchronized by adjusting the delay of
triggering time between the accelerometer and laser displacement sensor.
Figure 5.11 and Figure 5.12 show the shear strain profile and shear stress
profile obtained from the SSTS. Apparently, there was a time delay between
the shear strain (which was measured by using the laser displacement sensors)
and the shear stress profiles (which was measured by using the accelerometer).
This discrepancy was caused by the data synchronization problem as
mentioned earlier.
Figure 5.11: Shear Strain Profile for SSTS
-0.0025
-0.002
-0.0015
-0.001
-0.0005
0
0.0005
0.001
0.0015
0.002
0 1 2 3 4 5
She
ar S
trai
n
Time (s)

114
Figure 5.12: Shear Stress Profile for SSTS
In the previous chapter, the displacement profile of the shaking table
was found to be uniform and contained a dominant frequency of movement.
However, the trends of shear strain and stress profiles in the SSTS suggested
that the results were contaminated by noises with different frequency contents
(referred to Figure 5.11 and Figure 5.12). It was anticipated that the shear
strain and stress profiles in the SSTS were affected by the noises from the
supply of air suction pressure. Figure 5.13 shows a hysteresis loop for the
SSTS. The SSTS was unable to render a reasonable and consistent hysteresis
loop due to the problem of data synchronization and the noise effect.
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
0 1 2 3 4 5
She
ar S
tre
ss (
kPa)
Time (s)

115
Figure 5.13: Hysteresis Loop for SSTS
5.3.4 Summarizing the Results of Three Laboratory Setups
Table 5.2 summarizes the advantages and shortcomings of the LLSBT, SCT
and SSTS. Recommendations were put forward in Chapter 6 to improve the
test results of LLSBT, SCT and SSTS.
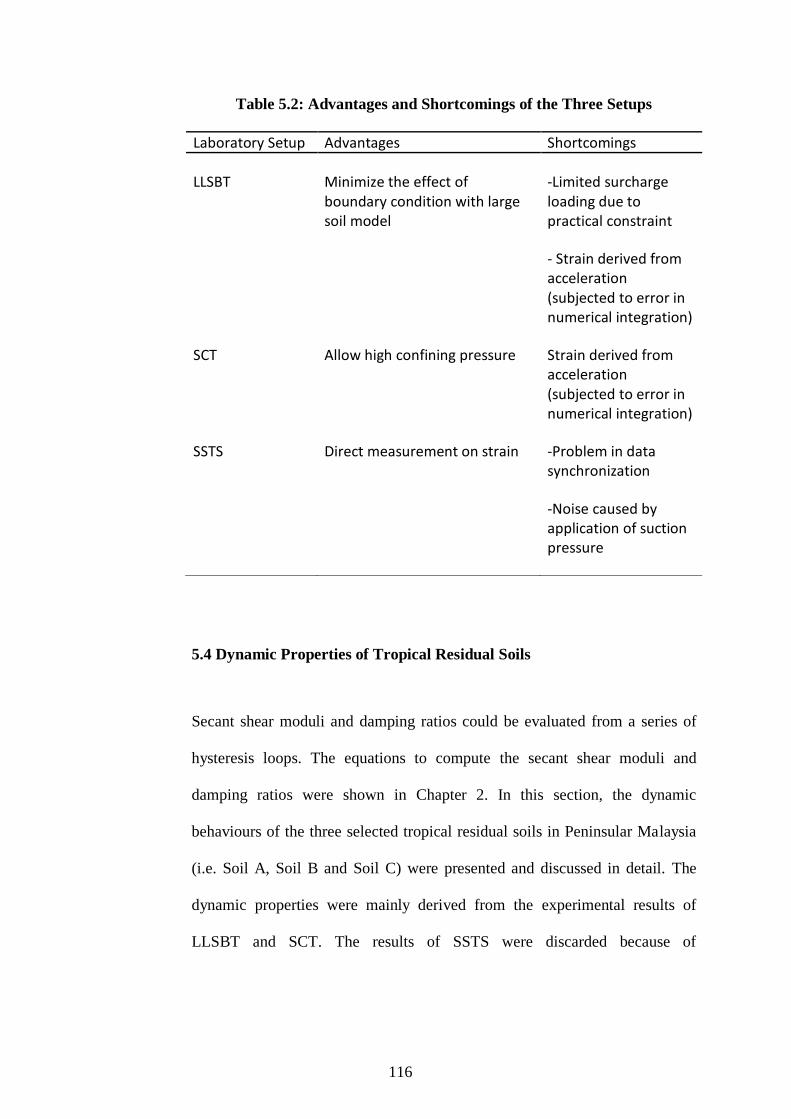
116
Table 5.2: Advantages and Shortcomings of the Three Setups
5.4 Dynamic Properties of Tropical Residual Soils
Secant shear moduli and damping ratios could be evaluated from a series of
hysteresis loops. The equations to compute the secant shear moduli and
damping ratios were shown in Chapter 2. In this section, the dynamic
behaviours of the three selected tropical residual soils in Peninsular Malaysia
(i.e. Soil A, Soil B and Soil C) were presented and discussed in detail. The
dynamic properties were mainly derived from the experimental results of
LLSBT and SCT. The results of SSTS were discarded because of
Laboratory Setup Advantages Shortcomings
LLSBT Minimize the effect of boundary condition with large soil model
-Limited surcharge loading due to practical constraint
- Strain derived from acceleration (subjected to error in numerical integration)
SCT Allow high confining pressure Strain derived from acceleration
(subjected to error in numerical integration)
SSTS Direct measurement on strain
-Problem in data synchronization
-Noise caused by application of suction pressure
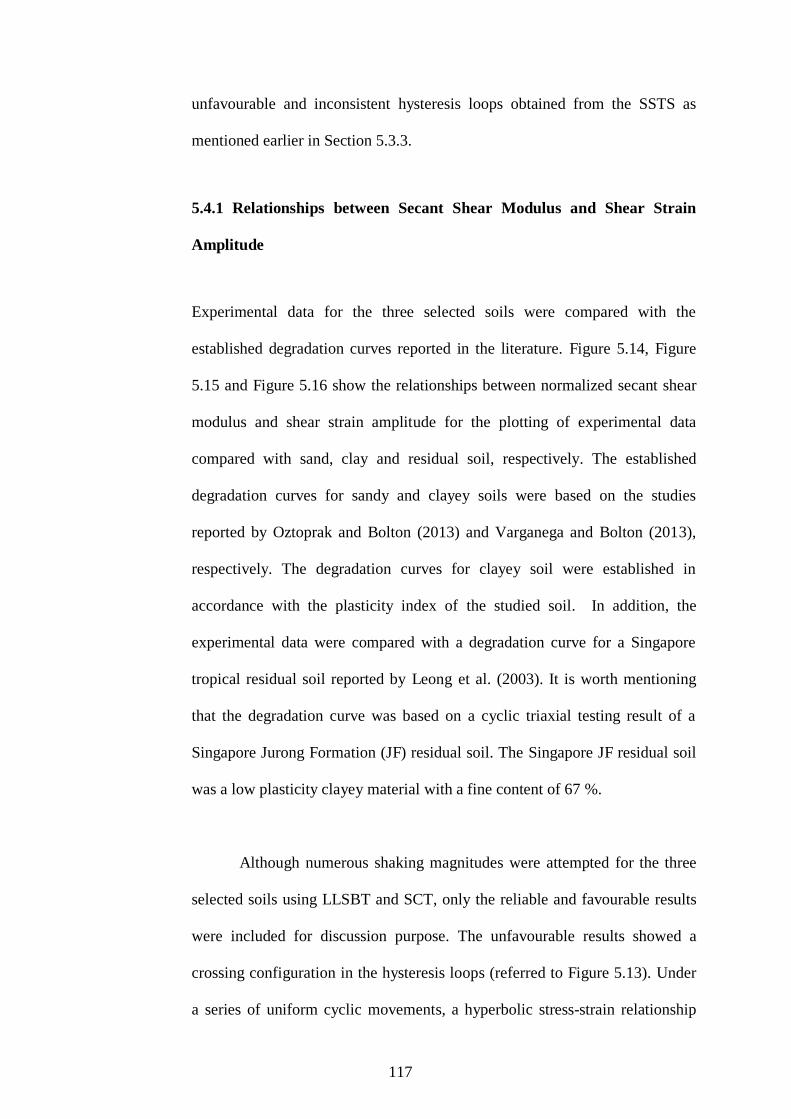
117
unfavourable and inconsistent hysteresis loops obtained from the SSTS as
mentioned earlier in Section 5.3.3.
5.4.1 Relationships between Secant Shear Modulus and Shear Strain
Amplitude
Experimental data for the three selected soils were compared with the
established degradation curves reported in the literature. Figure 5.14, Figure
5.15 and Figure 5.16 show the relationships between normalized secant shear
modulus and shear strain amplitude for the plotting of experimental data
compared with sand, clay and residual soil, respectively. The established
degradation curves for sandy and clayey soils were based on the studies
reported by Oztoprak and Bolton (2013) and Varganega and Bolton (2013),
respectively. The degradation curves for clayey soil were established in
accordance with the plasticity index of the studied soil. In addition, the
experimental data were compared with a degradation curve for a Singapore
tropical residual soil reported by Leong et al. (2003). It is worth mentioning
that the degradation curve was based on a cyclic triaxial testing result of a
Singapore Jurong Formation (JF) residual soil. The Singapore JF residual soil
was a low plasticity clayey material with a fine content of 67 %.
Although numerous shaking magnitudes were attempted for the three
selected soils using LLSBT and SCT, only the reliable and favourable results
were included for discussion purpose. The unfavourable results showed a
crossing configuration in the hysteresis loops (referred to Figure 5.13). Under
a series of uniform cyclic movements, a hyperbolic stress-strain relationship

118
was expected in a hysteresis loop (Hardin and Drnevich, 1972). For each type
of soil, there were in total four presentable data points each from the LLSBT
and SCT. When normalizing the secant shear modulus, the maximum shear
modulus was computed by using an empirical equation reported by Hardin and
Black (1968). The maximum shear moduli adopted in the present study ranged
from 10.6 MPa to 23.7 MPa depending on the soil type.
From Figure 5.15, the experimental data of Soil A (Sandy Clay) was
plotted below the lower bound of established curve for sand. It was also
plotted well below the established curve for clay. It should be noted that both
the established curves for sand and clay were developed from testing results of
pure sand and clay, respectively. It was anticipated that the mixture of sand
and clay in the natural tropical residual soil has altered their dynamic
properties significantly compared to the pure materials. For comparison with
residual soil, the experimental data of Soil A showed relatively good
agreement with the degradation curve of Singapore JF residual soil reported
by Leong et al. (2003). Similar trend as Soil A was also observed in Soil B
(Sandy Silt) as presented in Figure 5.16.
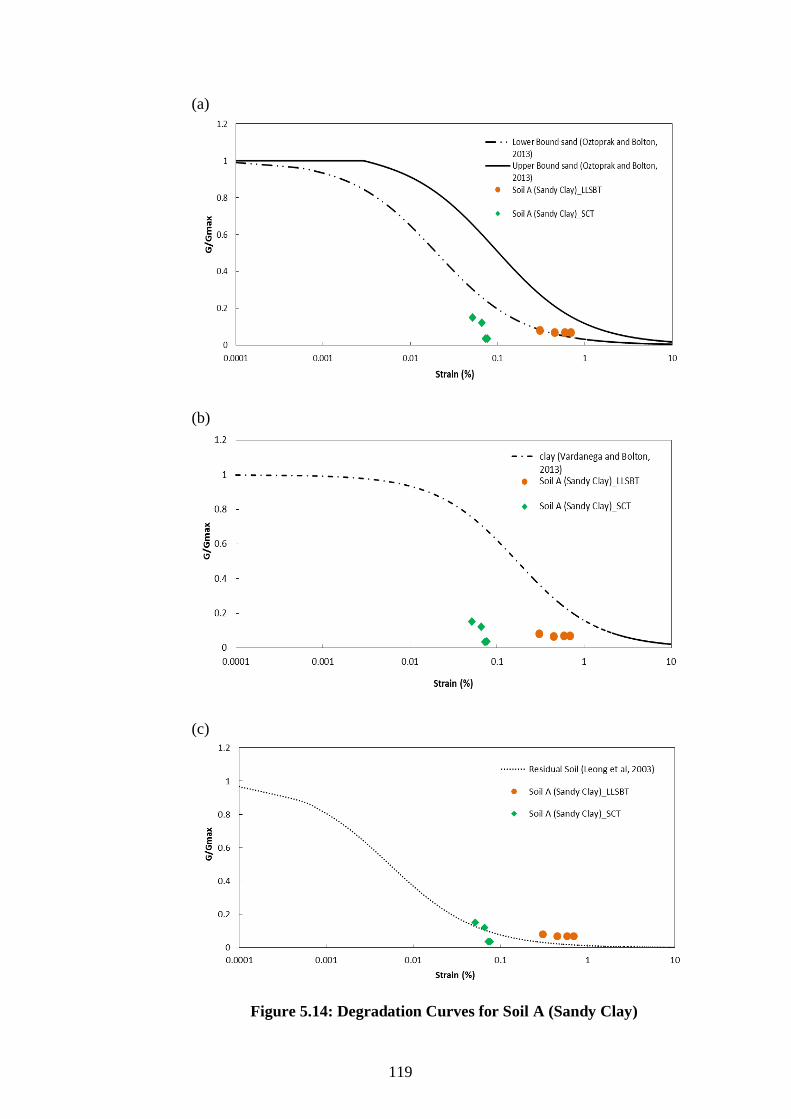
119
(a)
(b)
(c)
Figure 5.14: Degradation Curves for Soil A (Sandy Clay)

120
(a)
(b)
(c)
Figure 5.15: Degradation Curves for Soil B (Sandy Silt)
121
From the comparison between the experimental data and established
degradation curves, it can be inferred that the two selected tropical residual
soils (Soil A and Soil B) in Malaysia were unique and behaved neither as sand
nor clay. This observation was probably caused by the composition of sand-to-
fine content mixture, and the characteristics of parent rock formation of the
residual soils. This finding provoked further investigation on the dynamic
properties of residual soils in which a more explicit discussion will be
presented in the following Section 5.4.2.
From Figure 5.14, the experimental data of soil C (Silty Sand extracted
from sand mining trail) showed a relatively better fit to lower bound of sand
compared with Soil A and Soil B. This was because Soil C consists of
predominantly sandy material (i.e. content of coarse-grained material = 70 %).
However, the fine content in Soil C (i.e. 30 %) was believed to have played a
significant role on its dynamic properties. This was evidenced by some of the
mismatched data points below the lower bound of the established curve for
pure sand.

122
(a)
(b)
(c)
Figure 5.16: Degradation Curves for Soil C (Silty Sand)
123
5.4.2 Comparison of Present Data with Previous Findings of Residual
Soils
Figure 5.17 shows the comparison of experimental results in the present study
(residual Soil A and Soil B only) with the shear modulus of residual soils
reported from different parts of the world (Borden et al., 1996; Tou, 2003;
Leong et al., 2003; Tanaka and Lee, 2016). In general, shear moduli attenuate
with the increase of shear strain amplitude. The LLSBT and SCT were able to
facilitate soil movements from medium to large shear strain amplitude (i.e.
0.017 % to 1.48 %). SCT was able to facilitate soil movements with smaller
shear strain amplitude (i.e. 0.017 % - 0.077 %) as compared to the LLSBT (i.e.
0.077 % - 1.48 %).
Borden et al. (1996) investigated the dynamic properties of Piedmont
residual soil in North Carolina, United States. The compositions of Piedmont
residual soils ranged from silt to sand with different plasticity indexes. In their
study, Borden et al. (1996) focused mainly on the small-strain properties of
unsaturated soil samples using the resonant column and cyclic torsional shear
tests with the shear strain amplitude below 0.1 %. From Figure 5.17 it is
apparent that the shear moduli from the Piedmont residual soil were greater
than the experimental results of Soil A and Soil B. The discrepancy might be
attributed to the physical properties of residual soils and the characteristics of
parent rocks for different types of residual soil. The Piedmont residual soils
consisted of a wide spectrum of fine contents (in terms of silt and clay)
ranging from 10 % to 90 %, while the fine contents of Soil A and Soil B were
124
ranging from 54 % to 58 %. Besides, the degree of saturation of unsaturated
Piedmont residual soils were 39 % - 98 %, while the degree of saturation of
the residual soils in the present study were 88.6 % and 89.5 % for Soil A and
Soil B, respectively. From the literature, an unsaturated soil sample was
expected to have a higher stiffness than the saturated soil sample, and hence
the degree of saturation was an important parameter influencing the dynamic
properties of soils (Kramer, 2014). Soil A and Soil B were originated from the
sedimentary rocks whereas the Piedmont residual soil was originated from the
igneous and metamorphic rocks. In addition, the Piedmont soils are of sub-
tropic residual soils while the residual soils in the present study were
weathered under the tropical climate which was believed to have finer
particles under the intense weathering effect. From the foregoing, it can be
summarized that the dynamic properties of residual soil may be affected by
numerous factors including fine content, degree of saturation, characteristics
of parent rock, and weathering condition.
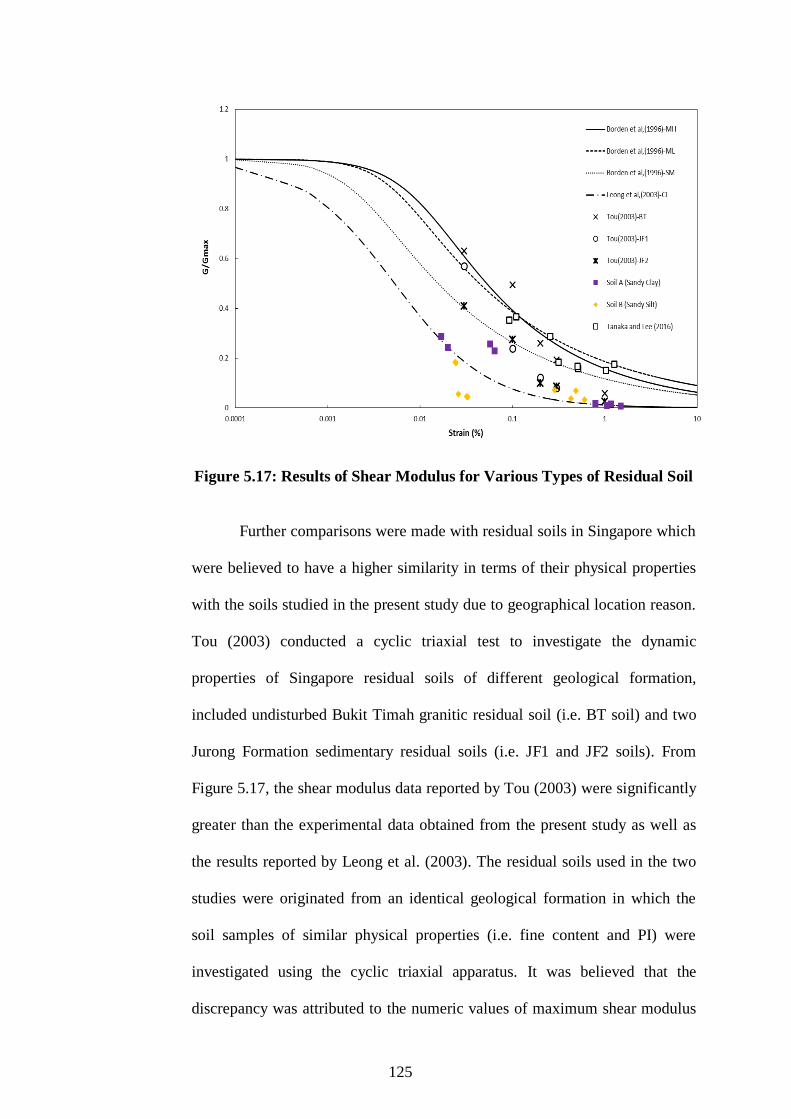
125
Figure 5.17: Results of Shear Modulus for Various Types of Residual Soil
Further comparisons were made with residual soils in Singapore which
were believed to have a higher similarity in terms of their physical properties
with the soils studied in the present study due to geographical location reason.
Tou (2003) conducted a cyclic triaxial test to investigate the dynamic
properties of Singapore residual soils of different geological formation,
included undisturbed Bukit Timah granitic residual soil (i.e. BT soil) and two
Jurong Formation sedimentary residual soils (i.e. JF1 and JF2 soils). From
Figure 5.17, the shear modulus data reported by Tou (2003) were significantly
greater than the experimental data obtained from the present study as well as
the results reported by Leong et al. (2003). The residual soils used in the two
studies were originated from an identical geological formation in which the
soil samples of similar physical properties (i.e. fine content and PI) were
investigated using the cyclic triaxial apparatus. It was believed that the
discrepancy was attributed to the numeric values of maximum shear modulus
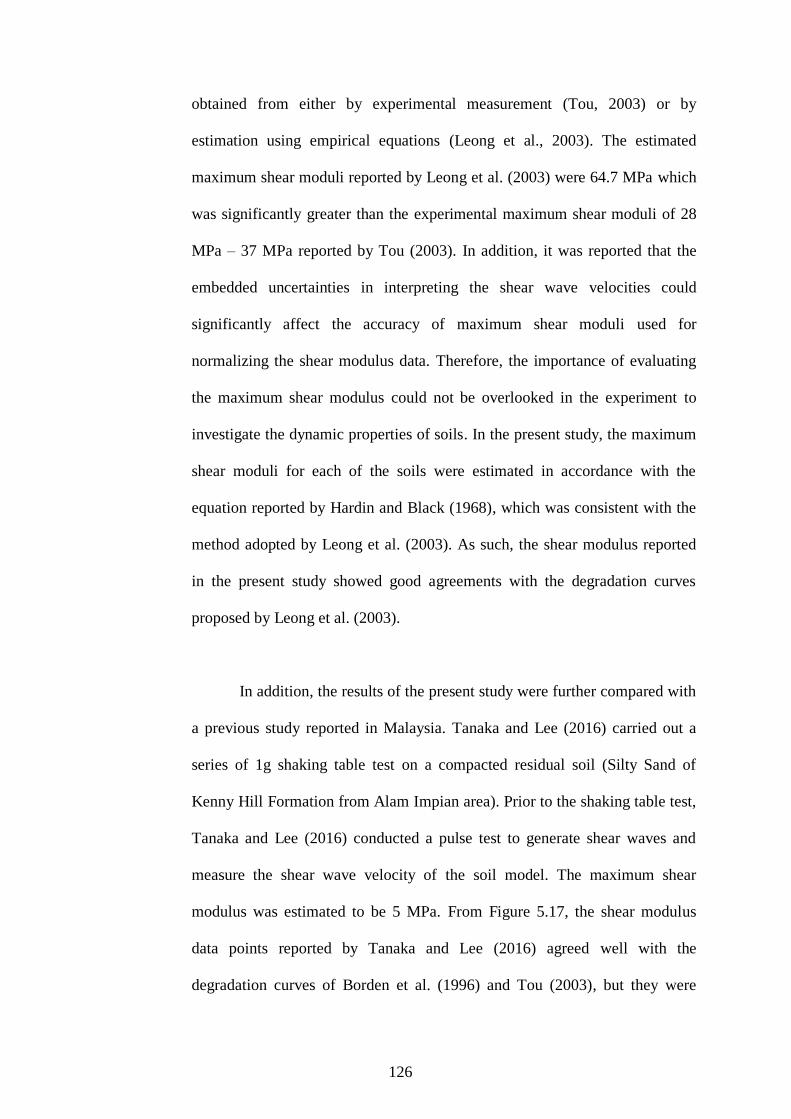
126
obtained from either by experimental measurement (Tou, 2003) or by
estimation using empirical equations (Leong et al., 2003). The estimated
maximum shear moduli reported by Leong et al. (2003) were 64.7 MPa which
was significantly greater than the experimental maximum shear moduli of 28
MPa – 37 MPa reported by Tou (2003). In addition, it was reported that the
embedded uncertainties in interpreting the shear wave velocities could
significantly affect the accuracy of maximum shear moduli used for
normalizing the shear modulus data. Therefore, the importance of evaluating
the maximum shear modulus could not be overlooked in the experiment to
investigate the dynamic properties of soils. In the present study, the maximum
shear moduli for each of the soils were estimated in accordance with the
equation reported by Hardin and Black (1968), which was consistent with the
method adopted by Leong et al. (2003). As such, the shear modulus reported
in the present study showed good agreements with the degradation curves
proposed by Leong et al. (2003).
In addition, the results of the present study were further compared with
a previous study reported in Malaysia. Tanaka and Lee (2016) carried out a
series of 1g shaking table test on a compacted residual soil (Silty Sand of
Kenny Hill Formation from Alam Impian area). Prior to the shaking table test,
Tanaka and Lee (2016) conducted a pulse test to generate shear waves and
measure the shear wave velocity of the soil model. The maximum shear
modulus was estimated to be 5 MPa. From Figure 5.17, the shear modulus
data points reported by Tanaka and Lee (2016) agreed well with the
degradation curves of Borden et al. (1996) and Tou (2003), but they were

127
significantly greater than those reported by Leong et al. (2003) and the present
study. It is believed that the discrepancy was caused by the underestimation of
the maximum shear modulus compared with the typical values of maximum
shear modulus suggested in literature.
5.4.3 Effect of Plasticity Index and Confining Pressure on Shear Modulus
From the literature review, the effect of confining pressure on shear modulus
was significant in sandy soil, while the effect of plasticity index prevailed on
clayey soils. Figure 5.18 depicts the typical degradation curves for a sandy soil
under different levels of confining pressure (Oztoprak and Bolton, 2013). At
specific shear strain amplitude, the shear modulus increased with the
increasing confining pressure.
Figure 5.18: Effect of Confining Pressure on Shear Modulus for Sandy
Soil (Oztoprak and Bolton, 2013)
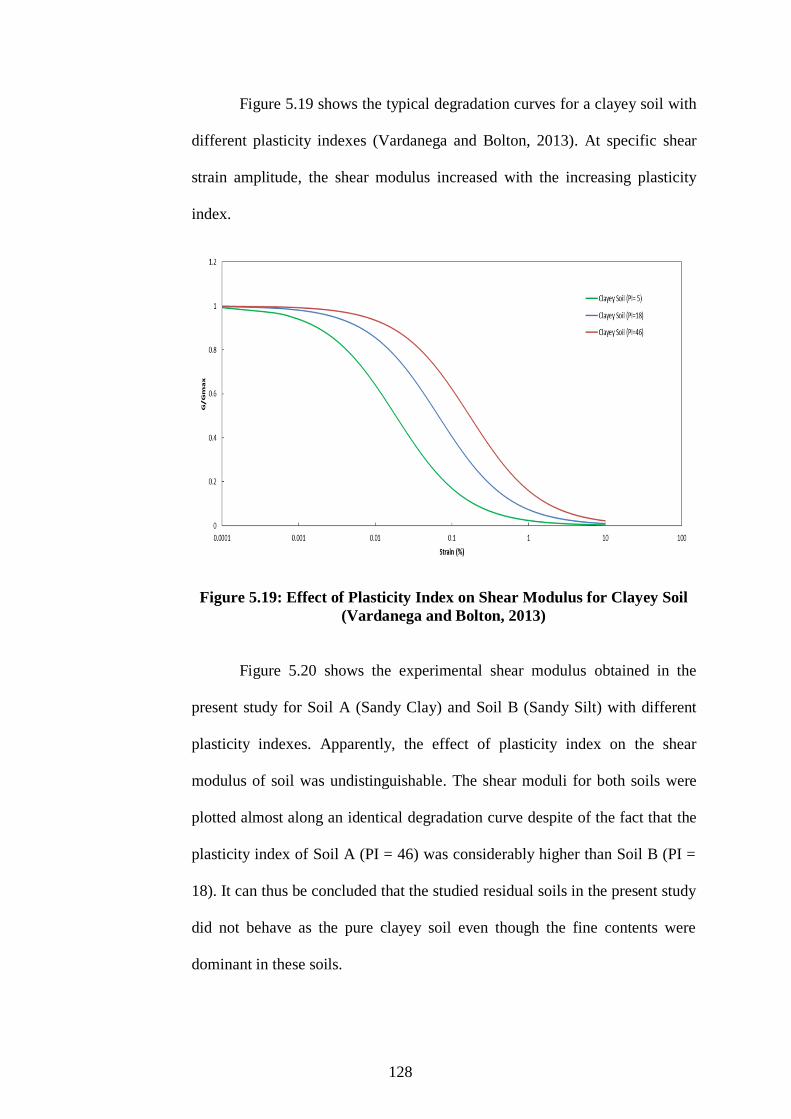
128
Figure 5.19 shows the typical degradation curves for a clayey soil with
different plasticity indexes (Vardanega and Bolton, 2013). At specific shear
strain amplitude, the shear modulus increased with the increasing plasticity
index.
Figure 5.19: Effect of Plasticity Index on Shear Modulus for Clayey Soil
(Vardanega and Bolton, 2013)
Figure 5.20 shows the experimental shear modulus obtained in the
present study for Soil A (Sandy Clay) and Soil B (Sandy Silt) with different
plasticity indexes. Apparently, the effect of plasticity index on the shear
modulus of soil was undistinguishable. The shear moduli for both soils were
plotted almost along an identical degradation curve despite of the fact that the
plasticity index of Soil A (PI = 46) was considerably higher than Soil B (PI =
18). It can thus be concluded that the studied residual soils in the present study
did not behave as the pure clayey soil even though the fine contents were
dominant in these soils.
129
Figure 5.20: Effect of Plasticity Index on Shear Modulus for Soil A and
Soil B
As mentioned earlier, the effect of confining pressure was significant
in sandy material. The effect of confining pressure on Soil C (70 % of granular
material) which was formed by sand mining trail was investigated to confirm
the statement. As shown in Figure 5.21, Soil C (Silty Sand) showed a good
agreement with the characteristics of sandy material when subjected to
different levels of confining pressures (i.e. 5 kPa, 10 kPa, 50 kPa and 100
kPa). At specific shear strain amplitude, the shear moduli for 100 kPa
confining pressure were higher than those of 50 kPa in SCT, and likewise for
LLSBT with confining pressures of 10 kPa and 5 kPa.
As for the tropical residual soils in the present study (Soil A and Soil
B), the effect of confining pressure on the shear modulus was less
distinguishable as shown in Figure 5.22 and Figure 5.23. The results implied
that the residual soils did not exhibit a similar dynamic behaviour as the sandy

130
material. This was largely attributed to the presence of fine contents in the
studied residual soils (Soil A = 54 % and Soil B = 58 % of fine contents).
(a)
(b)
Figure 5.21: Effect of Confining Pressure on Shear Modulus (Soil C)
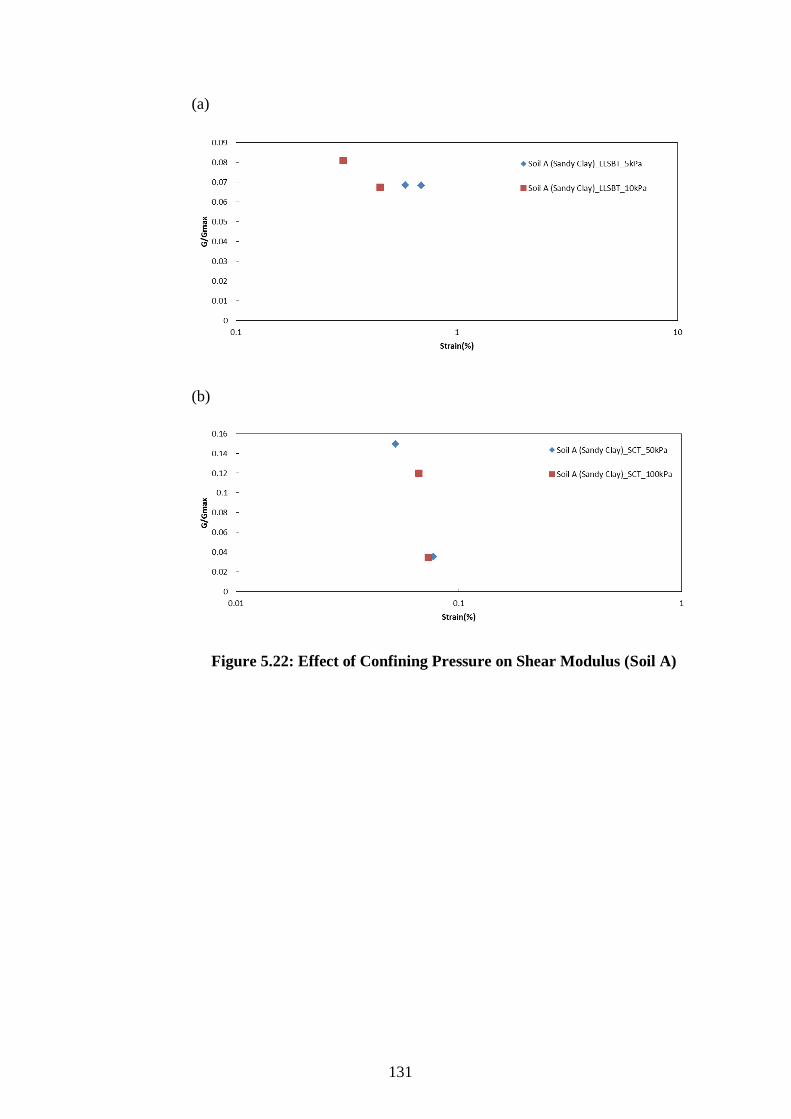
131
(a)
(b)
Figure 5.22: Effect of Confining Pressure on Shear Modulus (Soil A)

132
(a)
(b)
Figure 5.23: Effect of Confining Pressure on Shear Modulus (Soil B)
5.4.4 Relationship between Damping Ratio and Shear Strain Amplitude
Theoretically, damping ratio increases with the shear strain amplitude
(Ishibashi and Zhang, 1993). Figure 5.24 and Figure 5.25 show the
relationships between damping ratio and shear strain amplitude obtained from
the LLSBT and SCT, respectively. The experimental damping ratio data were
compared with the established damping ratio curves reported by Ishibashi and
Zhang (1993), which was obtained from statistical analysis on non-plastic
133
sand and plastic clay. From the experimental results, it was found that the
damping ratio data were not increasing with the shear strain amplitude in both
LLSBT and SCT. Besides, there was no direct relationship can be traced
between the damping ratio and the type of soil. At larger shear strain
amplitudes, the experimental data points obtained from the LLSBT were
scattered below the established curves suggested by Ishibashi and Zhang
(1993). For SCT, the experimental data points generally distributed within the
range of the established damping ratio curves at smaller shear strain
amplitudes. It should be noted that the damping ratio data reported by Leong
et al. (2003) also scattered below the established damping ratio curves.
The above-mentioned experimental observations from the LLSBT and
SCT were caused by the fact that lower shear stress and shear strain levels (i.e.
range of shear stress = 0.1 – 2.5 kPa and range of shear strain = 0.017 % -
0.077 %) were obtained in the SCT compared with those of LLSBT (i.e. range
of shear stress = 2 – 6 kPa and range of shear strain = 0.077 % - 1.48 %). This
was because the computation of damping ratio was defined by the area of
hysteresis loop divided by the multiplication of the shear stress range and
shear strain range. In this case, lower shear stress and shear strain ranges could
give rise to a greater damping ratio using the SCT despite of the fact that the
loop areas of the SCT were smaller than those of LLSBT. In specific, the low
magnitude of inertia shear stress generated in the SCT was caused by the
smaller loading mass applied on the top surface of soil sample compared with
the higher overburden loading on top of the soil model in the LLSBT. The
damping ratio data of LLSBT showed good agreements with the scattered

134
nature of data reported by Leong et al. (2003). It was unclear that this
observation was the result of sceptical reliability of the SCT setup or the
unique behaviours of tropical residual soils as opposing to the sand and clay
reported by Ishibashi and Zhang (1993). It is recommended that further studies
have to be conducted by using an alternative soil dynamic test (e.g. cyclic
triaxial test) to further investigate the damping ratio data at smaller shear strain
amplitudes. It is also worth mentioning that the frequencies of loading for the
LLSBT (i.e. 5 Hz) were slightly different to those applied in the SCT (i.e. 4
Hz – 6 Hz). This could give rise to a wider range of damping ratio data in the
SCT compared with those of LLSBT.
In addition, Brennan et al. (2005) reported that the damping ratio data
for a studied saturated sand (as shown in Figure 5.26) also scattered below the
established damping ratio curves reported by Ishibashi and Zhang (1993)
within the shear strain range of 0.1 % - 1 %.
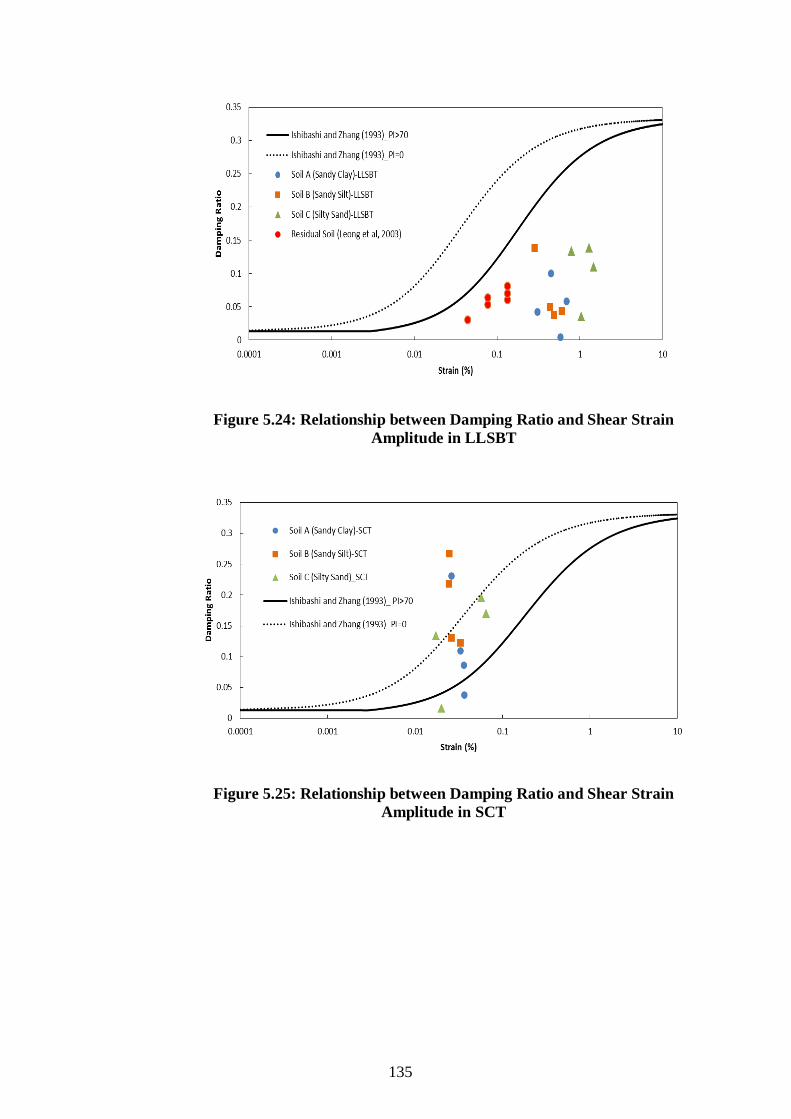
135
Figure 5.24: Relationship between Damping Ratio and Shear Strain
Amplitude in LLSBT
Figure 5.25: Relationship between Damping Ratio and Shear Strain
Amplitude in SCT
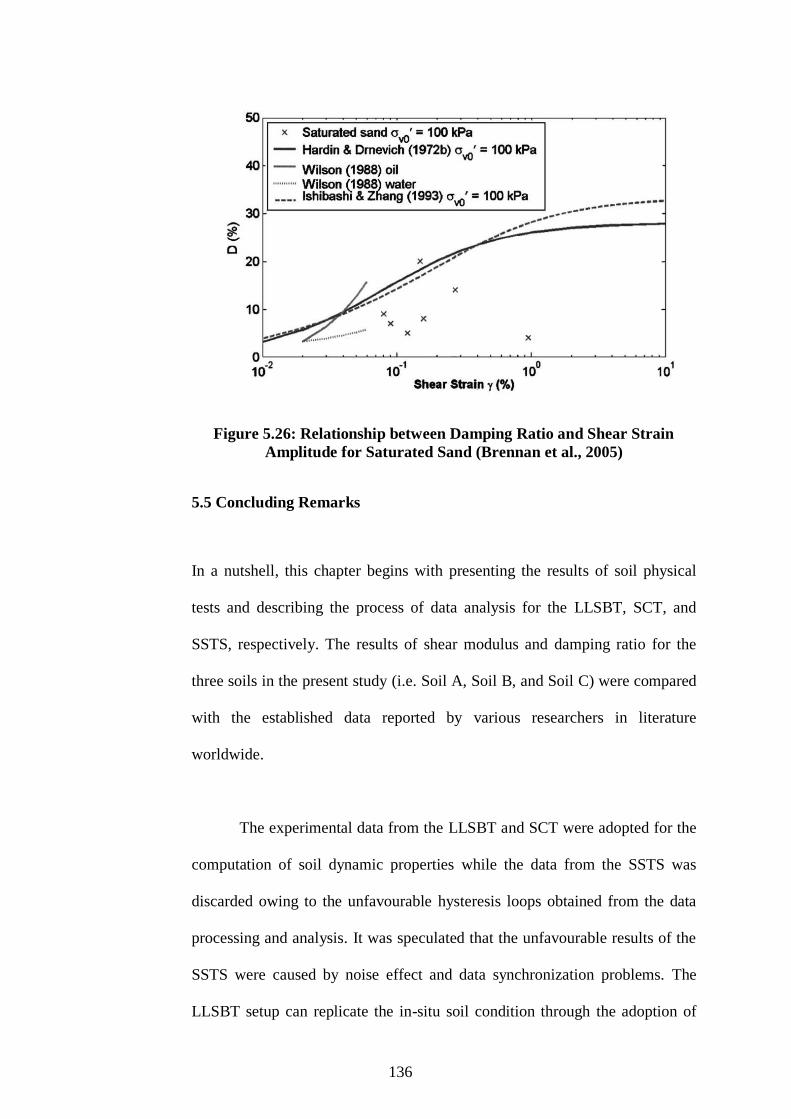
136
Figure 5.26: Relationship between Damping Ratio and Shear Strain
Amplitude for Saturated Sand (Brennan et al., 2005)
5.5 Concluding Remarks
In a nutshell, this chapter begins with presenting the results of soil physical
tests and describing the process of data analysis for the LLSBT, SCT, and
SSTS, respectively. The results of shear modulus and damping ratio for the
three soils in the present study (i.e. Soil A, Soil B, and Soil C) were compared
with the established data reported by various researchers in literature
worldwide.
The experimental data from the LLSBT and SCT were adopted for the
computation of soil dynamic properties while the data from the SSTS was
discarded owing to the unfavourable hysteresis loops obtained from the data
processing and analysis. It was speculated that the unfavourable results of the
SSTS were caused by noise effect and data synchronization problems. The
LLSBT setup can replicate the in-situ soil condition through the adoption of
137
larger soil sample, which can minimize the effect of boundary in the soil
model. However, the LLSBT was not able to produce a high overburden
pressure on the soil model owing to the practical constraint in the laboratory.
Subsequently, the SCT was developed to impose higher confining pressures to
the soil sample in which the stress condition of soil below ground surface can
be reproduced. Despite of the fact that the LLSBT and SCT can be used to
examine the dynamic properties of soil under different testing conditions, the
data processing of the measured acceleration data was heavily subjected to the
uncertainties during numerical integration. It follows that the SSTS setup was
attempted to obtain the strain profile through direct displacement measurement
by using a pair of laser displacement sensor.
From the experimental results of LLSBT and SCT, the shear moduli of Soil C
(i.e. Silty Sand, with a fine content of 30 % only) was found to fit well with
the established degradation curves of sandy soil reported in literature. The
experimental shear moduli of two studied tropical residual soils, namely Soil
A and Soil B (i.e. Sandy Clay and Sandy Silt, with fine contents ranging from
54 % to 58 %) were found to be plotted below the established degradation
curves for sand and clay obtained from literature. It can be concluded that the
studied topical residual soils in Malaysia are unique and behave neither as
pure sand nor clay. The damping ratio results obtained from the experiment in
the present study were believed to have unique characteristics compared with
those of pure sand and clay as well. Further verification on the damping ratios
at smaller shear strain amplitudes is required for the tropical residual soils in
this study.
138
From the comparison between the experimental results in the present
study with the data reported by Borden and et al. (1996), Leong and et al.
(2003), Tou (2003), and Tanaka and Lee (2016), several factors were
identified to be influential on the dynamic properties of residual soils. These
include the degree of saturation, characteristics of parent rock, and the
weathering condition of the environment. Besides, the effects of confining
pressure and plasticity index on the studied tropical residual soils were found
to be undistinguishable. In the present study, the fine content was found to be
an influential parameter on the dynamic properties of selected tropical residual
soils in Malaysia.

CHAPTER 6
CONCLUSION
6.1 Summary
In the present study, two tropical residual soils (i.e. Soil A and Soil B) and a
sand mining trail (i.e. soil C) were sampled and tested on a 1g shaking table in
the laboratory. Three different models of experimental setup (i.e. LLSBT,
SCT, and SSTS) were developed to investigate the dynamic behaviours of
selected soils in the laboratory. In the 1g shaking table test, the measured
acceleration records were processed to obtain the shear strain and shear stress
data. The direct displacement measurement from the laser displacement sensor
was used to verify the shear strain derived from the measured acceleration
data. Finally, the results of secant shear modulus and damping ratio were
evaluated from the stress-strain relationships for the studied soils. The
experimental results of shear modulus and damping ratio were then compared
with the findings reported from previous studies.
6.2 Conclusions
In this study, three conclusions can be drawn in addressing the objectives set
forth in the Chapter 1:
140
i. To evaluate the performance of three different laboratory setups
on a 1g shaking table for soil dynamic testing:
In the present study, the experimental data of LLSBT and SCT were
used as the main raw data for interpreting dynamic properties of soils,
while the data of SSTS was discarded owing to the noise effect and the
problem of data synchronization occurred in the experiment. The
LLSBT setup has the advantage of replicating the in-situ soil condition
with a larger size of soil model in which the effect of boundary
condition can be minimized. However, it was impractical to apply a
high overburden pressure on the soil model of LLSBT. To overcome
this shortcoming, the setup of SCT was developed to apply higher
confining pressures to the soil sample in which the actual stress
condition of soil below the ground surface can be reproduced.
Although the LLSBT and SCT can be used to investigate the dynamic
properties of soil under various desired testing conditions, the
processed shear strain and shear stress data were subjected to
uncertainties in the data processing and numerical integration. The
setup of SSTS was attempted to measure the deformation of soil
sample directly by using a pair of laser displacement sensor. Medium
to large shear strain amplitudes of soil deformation can be obtained
from the present testing setups, i.e. LLSBT (i.e. 0.077 % - 1.48 %) and
SCT (i.e. 0.017 % - 0.077 %).

141
ii. To recommend the most suitable method of signal processing for
the shaking table test performed in this particular study:
Digital band-pass filtering is found to be the most suitable method in
this particular study. The integrated displacement profile matches
reasonably well with the laser displacement measurement.
iii. To investigate the dynamic properties of selected residual soils in
Malaysia:
From the experimental results of LLSBT and SCT, the shear moduli of
Soil C (i.e. Silty Sand, with a fine content of 30 % only) was found to
agree well with the established degradation curves of sand reported in
literature. The fine content in Soil C (i.e. 30 %) was anticipated to play
a significant role on the dynamic properties of soil. The experimental
shear moduli of two studied tropical residual soils, namely Soil A and
Soil B (i.e. Sandy Clay and Sandy Silt, with fine contents ranging from
54 % to 58 %) were found to be mismatched with and plotted below
the degradation curves for pure sand and clay reported in literature. It
can be concluded that the studied topical residual soils in Malaysia are
unique and behave neither as pure sand nor clay. This finding provokes
the need of further investigation on the dynamic properties of tropical
residual soils in Malaysia by using different types of soil dynamic
testing. The damping ratio results of the tropical residual soils in
Malaysia were unique compared with those of non-plastic sand and
plastic clay. Further verification on the damping ratios at smaller shear
strain amplitudes is required for the tropical residual soils. Comparing

142
the data reported by Borden et al. (1996) with the experimental data in
this study, degree of saturation, characteristics of parent rock, and the
weathering condition were found to be influential on the shear moduli
of tropical residual soils in Malaysia. In addition, fine content was
found to be an influential parameter on the dynamic properties of the
selected tropical residual soils in Malaysia.
6.3 Recommendation
There are several recommendations suggested for future improvement in this
area of research:
1. The sampling rate of acceleration data acquisition system was
suggested to be 0.1 ms when carrying out a pulse test for the soil
sample. By conducting the pulse test, shear wave velocity can be
measured and the maximum shear moduli at small shear strain
amplitudes can be obtained. The accelerometers should be aligned
parallel to each other prior to the generation of shear wave pulses by
using a sledge hammer.
2. Improvement has to be undertaken so as to solve the synchronization
problem when using the laser displacement sensor and accelerometer
simultaneously.
3. Further improvement has to be undertaken to examine the actual
movement of soil sample (i.e. direct measurements on the soil instead

143
of top platen and base pedestal). A pair of accelerometers, which are
separated by a certain height, can be installed on the circumferential
surface of the soil sample by using a thin metal probe. The laser beams
of the laser displacement sensor can be positioned at the same location
as the accelerometers. In addition, the actual movement of the soil
sample can be monitored and the computed shear strain from the
accelerometers can be compared with the measurement of laser
displacement sensor.
4. Since the achievable range of shear strain amplitudes is approximately
within the range from 0.01 % to 1 %, the application of 1g shaking
table itself cannot produce a wide range of shear strain amplitudes.
Different types of laboratory testing for investigating the dynamic
properties of soils have to be conducted, such as cyclic triaxial test,
hollow cylinder torsional shear test, bender element test, and etc.
5. It is suggested to carry out more tests on different types of tropical
residual soil to enrich the database of dynamic properties of tropical
residual soils.
144
REFERENCES
Adnan, A. and Suradi, S., 2008. Comparison on the effect of earthquake and wind
loads on the performance of reinforced concrete buildings. Proceedings of the
14th World Conference on Earthquake Engineering, 12 - 17 October 2008
Beijing, China.
Atkinson, J., 2007. The mechanics of soils and foundations, 2nd ed. Oxford: Taylor
and Francis.
Araei, A.A. and Towhata, I., 2014. Impact and cyclic shaking on loose sand properties
in laminar box using gap sensors. Soil Dynamics and Earthquake Engineering,
66 (2014), pp. 401 - 414.
Balendra, T. and Li, Z., 2008. Seismic hazard of Singapore and Malaysia. EJSE,
Special Issue: Earthquake Engineering in the low and moderate seismic
regions of South East Asia and Australia (2008), pp. 57 - 63.
Bjerrum, L. and Landva, A., 1966. Direct simple-shear tests on a Norwegian quick
clay. Geotechnique, 16 (1), pp. l - 20.
Boore, D.M., 2001. Effect of baseline corrections on displacements and response
spectra for several recordings of the 1999 Chi-Chi, Taiwan, earthquake.
Bulletin of the Seismological Society of America, 91 (5), pp. 1199 – 1211.
Boore, D.M. and Bommer, J.J., 2005. Processing of strong-motion accelerograms:
Needs, options and consequences. Soil Dynamics and Earthquake Engineering,
25 (2), pp. 93 – 115.
Borden, R.H., Shao, L.S. and Gupta, A., 1996. Dynamic properties of Piedmont
residual soils. Journal of Geotechnical Engineering, 122 (10), pp. 813 – 821.
Brennan, A.J., Thusyanthan, N.I. and Madabhushi, S.P.G., 2005. Evaluation of Shear
Modulus and Damping. Journal of Geotechnical and Geoenvironmental
Engineering, 131 (12), pp. 1488 – 1497.
BSI, 1990. British Standard 1377: Methods of test for soils for civil engineering
purposes. United Kingdom: BSI Group.
Budhu, M., 1983. Nonuniformities imposed by simple shear apparatus. Canadian
Geotechnical Journal, 21 (1), pp. 125 – 137.
Chiu, H.C., 1997. Stable baseline correction of digital strong-motion data, Bulletin of
the Seismological Society of America, 87 (4), pp. 932 – 944.
Dietz, M. and Wood, D.M., 2007. Shaking table evaluation of dynamic soil properties. Proceedings of the 4th International Conference on Earthquake Geotechnical
Engineering, 25 - 28 June 2007 Thessaloniki, Greece.
Douglas, J. and Boore, D.M., 2011. High-frequency filtering of strong-motion records.
Bulletin of Earthquake Engineering, 9 (2), pp. 395 – 409.
Dyvik, R., Berre, T., Lacasse, S. and Raadim, B., 1987. Comparison of truly
undrained and constant volume direct simple shear tests. Géotechnique, 37 (1),
pp. 3 – 10.
Elia, B.D., Lanzo, G. and Pagliaroli, A., 2003. Small-Strain Stiffness and Damping of
Soils in a Direct Simple Shear Device. Proc. 2003 Pacific Conference on
Earthquake Engineering, 13 – 15 February 2003 Christchurch, New Zealand.
Foo, K.Y., 1983. The Palaeozoic sedimentary rocks of Peninsular Malaysia-
stratigraphy and correlation. Proceedings of the Workshop on Stratigraphic
Correlation of Thailand and Malaysia, 8 – 10 September 1983 Haad Yai,
Thailand.

145
Graizer, V., 2006. Tilts in strong ground motion. Bulletin of the Seismological Society
of America, 96 (6), pp. 2090 – 2102.
Gue, S.S. and Wong, S.Y., 2009. Slope engineering design and construction practice
in Malaysia. CIE-IEM Joint Seminar on Geotechnical Engineering, 26 – 27
August 2009 Yilan, Taiwan.
Hardin, B.O. and Black, W.L., 1968. Vibration modulus of normally consolidated
clay. Journal of the Soil Mechanics and Foundations Division, 94 (2), pp. 353
– 369.
Hardin, B.O. and Drnevich, V.P., 1972. Shear modulus and damping in soils: design
equations and curves, Journal of the Soil Mechanics and Foundations Division,
98 (7), pp. 667 – 692.
Huat, B.B.K., Gue, S.S. and Faisal, H.A., 2004. Tropical residual soil engineering,
1st ed. London: Taylor and Francis.
Iai, S., 1988. Similitate for shaking table tests on soil-structure-fluid model in 1g
gravitational field. Report of the Port and Harbour Research Institute, 27 (3),
pp. 3 – 24.
Ishibashi, I. and Zhang, X., 1993. Unified dynamic shear moduli and damping ratios
of sand and clay. Soils and Foundations, 33 (1), pp. 182 – 191.
Ishihara, K. and Yamazaki, F., 1980. Cyclic simple shear tests on saturated sand in
multi-directional loading. Soils and Foundations, 20 (1), pp. 45 – 59.
Iwan, W.D., Moser, M.A. and Peng, C.Y., 1985. Some observations on strong-motion
earthquake measurement using a digital accelerograph. Bulletin of the
Seismological Society of America, 75 (5), pp. 1225 – 1246.
Iwasaki, T., Tatsuoka, F. and Takagi, Y., 1978. Shear Moduli of Sand under Cyclic
Torsional Shear Loading. Soils and Foundation, 18 (1), pp. 39 – 56.
Kazama, M., Toyota, H., Towhata, I. and Yanagisawa, E., 1996. Stress strain
relationship of sandy soils obtained from centrifuge shaking table tests.
Journal of JSCE, Geotechnical Engineering, Vol. 535 / III - 34, pp. 73 - 82.
(In Japanese)
Kazama, M. and Yanagisawa, E., 1996. Dynamic properties of soft clay directly
obtained from centrifuge shaking table test. Eleventh World Conference on
Earthquake Engineering, 23 – 28 June 1996 Acapulco, Mexico.
Koga, Y. and Matsuo, O., 1990. Shaking table tests of embankment resting on
liquefiable sandy ground. Soils and Foundations, 30 (4), pp. 162 – 174.
Kokusho, T., 1980. Cyclic Triaxial Test of Dynamic Soil Properties for wide strain
ranges. Soils and Foundations, 20 (2), pp. 45 – 60.
Kokusho, T., 2004. Nonlinear site response and strain-dependent soil properties.
Current Science, 87 (10), pp. 1363 – 1369.
Koo, K.K., Lim, J.X., Yang, C.L., Lee, M.L., Tanaka, Y. and Zhao, J.J., 2016.
Shaking table test on dynamic behaviours of tropical residual soils in Malaysia.
KSCE Journal of Civil Engineering, 21 (5), pp. 1735 - 1746.
Kramer, S.L., 2013. Geotechnical Earthquake Engineering, 1st ed. United Kingdom:
Pearson New International Edition.
Lanzo, G., Vucetic, M. and Doroudian, M., 1997. Reduction of Shear Modulus at
Small Strains in Simple Shear. Journal of Geotechnical and
Geoenvironmental Engineering, 123 (11), pp. 1035–1042.
Lee, V.W. and Trifunac, M.D., 1990. Automatic digitization and processing of
accelerograms using PC. Report CE 90 – 03, Department of Civil Engineering,
University of Southern California, United States.

146
Leong, E.C., Rahardjo, H. and Cheong, H.K., 2003. Stiffness-strain relationship of
Singapore residual soils. Proc. 2003 Pacific Conference on Earthquake
Engineering, 13 – 15 February 2003 Christchurch, New Zealand.
McCarthy, D.F., 1993. Essentials of soil mechanics: Basic geotechnics, 4th ed.
Englewood Cliffs, New Jersey: Regents/ Prentice Hall.
Mollova, G., 2007. Effects of digital filtering in data processing of seismic
acceleration records. Eurasip Journal on Advances in Signal Processing, 2007
(29502), pp. 1 - 9.
Mohd Rosaidi, C.A., 2001. Earthquake monitoring in Malaysia. Seismic Risk Seminar,
25 September 2001 Kuala Lumpur, Malaysia.
Nazri, F.M. and Alexander, N.A., 2012. Predicting the collapse potential of structures.
The 15th World Conference on Earthquake Engineering, 24 - 28 September
2012 Lisbon, Portugal.
Ooi, T.A., 1982. Malaysian soils and associated problems. Chapter 2, Geotechnical
Engineering Course, 22 March – 2 April 1982, University Malaya, Malaysia.
Ohsaki, Y., 1995. New introduction to spectrum analysis of earthquake ground
motion, Japan: Kajimashuppan (in Japanese).
Oztoprak, S. and Bolton, M.D., 2012. Stiffness of sands through a laboratory test
database. Géotechnique, 63 (1), pp. 54 – 70.
Piersol, A. and Paez, T., 2010. Harris' Shock and Vibration Handbook, 6th ed. Europe,
United States: McGraw-Hill Education.
Rahardjo, H., Aung, K.K., Leong, E.C. and Rezaur, R.B., 2004. Characteristics of
residual soils in Singapore as formed by weathering. Engineering Geology, 73
(2004), pp. 157 – 169.
Rahardjo, H., Lee, T.T., Leong, E.C. and Rezaur, R.B., 2005. Response of a residual
soil slope to rainfall. Canadian Geotechnical Journal, 42 (2), pp. 340 – 351.
Richardson, A.M. and Whitman, R.V., 1963. Effect of strain-rate upon undrained
shear resistance of a saturated remoulded fat clay. Geotechnique, 13 (4), pp.
310 – 324.
Seed, H.B. and Idriss, I.M., 1970. Soil moduli and damping factors for dynamic
response analyses. EERC report, EERC, California, United States.
Shakri, M.S. and Sanjery, K.A., 2015. Study potential earthquake threat in Peninsular
Malaysia. AENSI Journal, 9 (16), pp. 13 – 19.
Slifka, L.D., 2004. An Accelerometer Based Approach to Measuring Displacement of
a Vehicle Body. Master thesis, University of Michigan, Ann Arbor, United
States.
Sooria, S.Z., Sawada, S. and Goto, H., 2012. Proposal for seismic resistant design in
Malaysia: assessment of possible ground motions in Peninsular Malaysia.
Annuals of Disas. Prev. Res. Inst., Kyoto Univ., 30 September 2012 Kyoto,
Japan.
Taha, M. R., Hossain, M. K., & Mofiz, S. A., 2000. Effect of suction on the strength
of unsaturated soil. In Proceedings of Sessions of Geo-Denver 2000 -
Advances in Unsaturated Geotechnics, 5 – 8 August 2000 Denver, Colorado.
Tan, B.K. and Azwari Huslan Mohd., 2001. Physio-chemical properties of
carboneceauos shale soilsin the Yong Peng area, Johor. Geological Society of
Malaysia Annual Geological Conference, 10 October 2001 Pangkor Island,
Malaysia.
Tanaka, Y. and Lee, M.L., 2016. Laboratory study on dynamic properties of
compacted residual soil in Malaysia. Geotechnical Engineering Journal of the
SEAGS & AGSSEA, 47 (1), pp. 1 – 8.
147
Tou, J.H., 2003. Cyclic triaxial test apparatus for evaluating dynamic properties of
residual soils. Master Thesis, Nanyang Technological University, Singapore.
Tsai, C.C., Lin, W.C. and Chiou, J.S., 2016. Identification of dynamic properties
through shaking table tests on a large saturated sand specimen in a laminar
shear box. Soil Dynamics and Earthquake Engineering, 83 (2016), pp. 59 – 68.
Ueng, T.S., Chen, C.H. and Tsou, C.F., 2007. Preparation of large Mailiao silty sand
specimen for shaking table test. 4th International Conference on Earthquake
Geotechnical Engineering, 25 - 28 June 2007 Thessaloniki, Greece.
Vardanega, P.J. and Bolton, M., 2013. Stiffness of clays and silts : Normalizing shear
modulus and shear strain. Journal of Geotechnical and Geoenvironmental
Engineering. 139 (9), pp. 1575 – 1589.
Vucetic, M. and Dobry, R., 1991. Effect of soil plasticity on cyclic response. Journal
of Geotechnical Engineering, 117 (1), pp. 89 – 107.
Wijewickreme, D. and Vaid, Y.P., 2008. Experimental observations on the response
of loose sand under simultaneous increase in stress ratio and rotation of
principal stresses. Canadian Geotechnical Journal, 45 (5), pp. 597 – 610.
Xu, B.B., Nakai, K., Noda, T. and Takaine, T., 2013. A three dimensional soil-water
coupled FE analysis of hollow cylinder test concerning non-uniform
deformation. Soils and Foundations, 53 (6), pp. 923 – 936.
148
LIST OF PUBLICATIONS
1. Lim, J.X., Lee, M.L. and Tanaka, Y., 2017. Systematic Approaches for
Signal processing of soil shaking table test. The 6th
International
Conference of Euro Asia Civil Engineering Forum (EACEF-2017), 22-
25 August 2017 Seoul, South Korea. (Published)
2. Lim, J.X., Lee, M.L. and Tanaka, Y., 2017. Effect of fine content on
soil dynamic properties. Journal of Engineering Science and
Technology. (Conditionally accepted)
3. Lim, J.X., Lee, M.L. and Tanaka, Y., 2017. Investigation of soil
dynamic properties in Malaysia using 1g shaking table test with
different experimental setups. Geomechanics and Engineering.
(Under-reviewed)





























