-
8/16/2019 Example Chap1
1/14
C h a p
t e r 1
1
-
8/16/2019 Example Chap1
2/14
CHAPTER I EXANPLE
2
-
8/16/2019 Example Chap1
3/14
C h a p
t e r 1
3
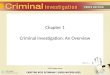
1.1 Illustrative Example: Blending system
Notation:
• w1, w2 and w are mass flow rates
• x1, x2 and x are mass
fractions of component A
-
8/16/2019 Example Chap1
4/14
C h a p
t e r 1
4
Assumptions:
1. w1 is constant
2. x2 = constant = 1 (stream 2 is pure A)
3. Perfect mixing in the tank
Control Objective:
eep x at a desired !alue (or "set point#) xsp,
despite !ariations in x1(t ). $low rate w2 can %e
ad&usted for this purpose.
Terminology:
• 'ontrolled !aria%le (or "output !aria%le#) x
• anipulated !aria%le (or "input !aria%le#) w2
• *istur%ance !aria%le (or "load !aria%le#) x
-
8/16/2019 Example Chap1
5/14
C h a p
t e r 1
5
Design Question. +hat !alue of is reuired to ha!e2w
-SP x x=
Overall balance:
Component A balance:
1 2 (1/1)w w w= + −
1 1 2 2 (1/2)w x w x wx+ − =
(0he o!er%ars denote nominal stead/state design !alues.)
• At the design conditions, . u%stitute . 1/2,
and , then sol!e . 1/2 for
SP x x= SP x x=
2 1 x = 2w
12 1 (1/3)
1
SP
SP
x xw w
x
−=
−
-
8/16/2019 Example Chap1
6/14
C h a p
t e r 1
6
• uation 1/3 is the design euation for the %lending
sstem.
• 4f our assumptions are correct, then this !alue of will
keep
at . 5ut what if conditions change-
x
SP x
Control Question. Suppose that the inlet concentration
x1
changes with time. How can we ensure that x remains at or
near
the set point ?
As a specific example, if and , then x 6 xSP.
SP x
1 1 x x> 2 2w w=
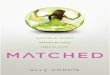
Some Possible Control Strategies:
Method 1 Measure x and adjust w2.
• 4ntuiti!el, if x is too high, we should reduce
w27
2w
-
8/16/2019 Example Chap1
7/14
C h a p
t e r 1
7
• Proportional feed%ack control law,
( ) ( )2 2
(1/8)c SP
w t w K x x t = + −
1. where K c is called the controller gain.
2. w2(t ) and x(t ) denote !aria%les that change
with time t .
3. 0he change in the flow rate, is proportional tothe de!iation
from the set point, xSP 9 x(t ).
( )2 2 ,w t w−
-
8/16/2019 Example Chap1
8/14
C h a p
t e r 1
8
-
8/16/2019 Example Chap1
9/14
C h a p
t e r 1
9
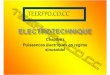
Method ! Measure x1 and adjust w2.
• 0hus, if x1 is greater than , we would decrease
w2 so that
• One approach 'onsider . (1/3) and replace and with
x1(t ) and w2(t ) to get a control law
1 x
2 27w w<
1 x 2w
( )
( )12 1 (1/:)1
SP
SP
x x t
w t w x
−
= −
-
8/16/2019 Example Chap1
10/14
C h a p
t e r 1
10
-
8/16/2019 Example Chap1
11/14
C h a p
t e r 1
11
• 5ecause . (1/3) applies onl at stead state, it is not
clear
how effecti!e the control law in (1/:) will %e for transient
conditions.
Method " Measure x1 and x, adjust w2.
• 0his approach is a com%ination of ethods 1 and 2.
Method # Use a larger tan.
• 4f a larger tank is used, fluctuations in x1 will
tend to %e damped
out due to the larger capacitance of the tank contents.
•;owe!er, a larger tank means an increased capital cost.
-
8/16/2019 Example Chap1
12/14
C h a p
t e r 1
12
1! Classi$ication o$ Control Strategies
Method Measured!aria"le
Manipulated!aria"le
#ategor$
1 x w2 $5a
2 x1 w2 $$
3 x1 and x w2 $$
-
8/16/2019 Example Chap1
13/14
C h a p
t e r 1
13
• 4t is important to make a distinction %etween negati%e
&eed"ac
and positi%e &eed"ac .
ngineering sage !s. ocial ciences
• Advantages:
'orrecti!e action is taken regardless of the source of
the
distur%ance.
>educes sensiti!it of the controlled !aria%le
todistur%ances and changes in the process (shown later).
• 'isadvantages:
?o correcti!e action occurs until after the distur%ance
hasupset the process, that is, until after x differs from
x sp.
@er oscillator responses, or e!en insta%ilit
-
8/16/2019 Example Chap1
14/14
C h a p
t e r 1
14
%eed$or(ard Control:
*istinguishing feature measure a distur%ance
!aria%le
• Advantage:
'orrect for distur%ance %efore it upsets the process.
• 'isadvantage:
ust %e a%le to measure the distur%ance.
?o correcti!e action for unmeasured distur%ances.