-
Exact Integration Formulas for the Finite VolumeElement Method
on Simplicial MeshesT. V. Voitovich,1 S. Vandewalle21Institute of
Applied Mathematics, Albert-Ludwigs-Universität Freiburg,D-79104
Freiburg, Germany
2Department of Computer Science, Katholieke Universiteit
Leuven,B-3001 Leuven, Belgium
Received 6 December 2004; accepted 25 September 2006Published
online 12 February 2007 in Wiley InterScience
(www.interscience.wiley.com).DOI 10.1002/num.20210
This article considers the technological aspects of the finite
volume element method for the numerical solu-tion of partial
differential equations on simplicial grids in two and three
dimensions. We derive new classesof integration formulas for the
exact integration of generic monomials of barycentric coordinates
over dif-ferent types of fundamental shapes corresponding to a
barycentric dual mesh. These integration formulasconstitute an
essential component for the development of high-order accurate
finite volume element schemes.Numerical examples are presented that
illustrate the validity of the technology. © 2007 Wiley
Periodicals,Inc. Numer Methods Partial Differential Eq 23:
1059–1082, 2007
Keywords: finite volume element method; barycentric coordinates;
integration formulas
I. INTRODUCTION
Finite volume element (FVE) or box methods [1–4], also called
control-volume finite elementmethods [5–7], play an important rôle
in the present practice of numerically solving partial
dif-ferential equations (PDEs). From the finite element method,
they inherit the use of piecewisepolynomial finite element spaces
for the representation of the solution, the PDE coefficients
andsource functions. Another feature rooted in the finite element
context is the suitability for use withgeneral and irregular grids,
allowing the effective treatment of complex geometries, with a
naturalrealization of local grid refinement and adaptivity. From
the finite volume method, they inherita natural discrete
conservation property, the simplicity of approximation and the
applicability ofone-dimensional upwind schemes.
The FVE method was created to generalize and systematize the use
of piecewise polynomialfinite element spaces for discretization in
the classical finite volume method. The FVE method
Correspondence to: S. Vandewalle, Department of Computer
Science, Katholieke Universiteit Leuven, Celestijnenlaan200A,
B-3001 Leuven, Belgium (e-mail:
[email protected])Contract grant sponsor: K. U.
Leuven Research CouncilContract grant sponsor: Project
IDO/00/08Contract grant sponsor: Belgian Office for Scientific,
Technical, and Cultural Affairs
© 2007 Wiley Periodicals, Inc.
-
1060 VOITOVICH AND VANDEWALLE
starts with a partitioning of the computational domain into a
set of finite elements, and the sub-sequent definition of a dual
finite volume mesh superimposed on the finite element grid.
Forevery finite volume, the method writes out the integral
conservation form of the PDE. Using thefinite element
representation of the solution, a discrete set of linear or
nonlinear equations is thenconstructed. In that step, one is faced
with the integration of the element-based interpolation
poly-nomials over certain geometrical shapes defined by the dual
mesh. The present article addresses theproblem of the exact
integration of those polynomials. For a clear exposition of the FVE
method,a discussion of its use for solving problems on composite
meshes, an analysis of its accuracy,and a description of a
multigrid approach for solving the resulting discrete set of linear
equations,we refer to the monograph by McCormick [8]. An extension
of these ideas toward using mixedfinite elements for porous media
flow and a careful, physically motivated selection of the
controlvolumes for that type of problem are described in [9]. An
error analysis and extension towardpolynomial finite elements of
arbitrary order is given in [10] and in the thesis by Trujillo
[11].
Contrary to the finite element method, the technological basis
of the FVE method is not wellestablished; the integration formulas
are in many cases not readily available. Such formulas arebased on
a local representation of the polynomials with the use of a set of
basis functions and thesubsequent exact integration of those basis
functions over the corresponding geometrical shapes.In finite
element methods on simplicial grids, the polynomial basis functions
are usually expressedin terms of barycentric simplex coordinates.
Then, formulas for the exact integration of the genericmonomials in
barycentric coordinates along an edge of a triangle, over a
triangular element, andover a tetrahedron, as provided, e.g., by
Eisenberg and Malvern [12], are used to complete theapproximation.
For finite volume discretization, a general approach for the
integration of polyno-mial basis functions over arbitrary polygonal
and polyhedral grids was given by Liu and Vinokur[13]. In their
approach an arbitrary polyhedron is subdivided into a union of
tetrahedra and an arbi-trary polygon into a union of triangles.
Hence, a triangle and a tetrahedron, and also a straight
linesegment, are the fundamental shapes for the exact integration.
In [13], the polynomial basis func-tions are expressed as
generalized Taylor series in terms of tensor products of the
position vector.Thus, formulas for the exact integration of generic
monomials in Cartesian coordinates are derived.
In this article we develop the integral formulas required in a
typical FVE implemenation. Wefocus on simplicial grids, with
triangles (2D) and tetrahedra (3D) as the fundamental elements.We
consider barycentric dual meshes, also called Donald dual meshes.
In the 2D case, those areconstructed with the use of the
barycenters of the simplices and the midpoints of the edges; in
the3D case, also the barycenters of the tetrahedron sides are
involved. As a novel approach towardsthe derivation of FVE
integration formulas, we will adopt the finite element practice to
express thepolynomial basis functions in terms of barycentric
coordinates. This enables an easy evaluation ofthe necessary FVE
integrals, once a set of formulas for the integration of monomials
in barycentriccoordinates is available. No prior subdivision of the
integration domains into simplicial elementsas in [13] will be
required. The article will extend the previous work of the first
author [14].There, for the 2D case, formulas for the integration of
monomials of the first and second orderwere derived on the basis of
geometrical observations. In the present article a new and much
moregeneral procedure is developed for the derivation of the values
of more general integrals, in both2D and 3D settings.
The article is organized as follows. First, in Section II, we
recall the basic principles behind thefinite volume element method
and illustrate its application for solving PDEs on simplicial
grids.The integrals required in the discretization procedure are
derived. In Section III, the formulasfor the exact integration of
monomials are constructed for the 2D case. The 3D case is treated
inSection IV. Finally, in Section V, the use of the formulas is
illustrated by means of some numericalexperiments.
Numerical Methods for Partial Differential Equations DOI
10.1002/num
-
EXACT INTEGRATION FORMULAS FOR THE FVE METHOD 1061
II. A REVIEW OF THE FVE METHOD
In this section we explain the notations that are used in the
article and elaborate the main featuresof the proposed technology.
We also identify the integrals that need to be provided for an
efficientimplementation of the FVE method.
A. FVE Method Basics
The FVE method is applicable to a wide range of PDEs. Here, for
illustration purposes, we focuson a 2D
convection-diffusion-reaction equation from fluid dynamics, of the
form
∂(ρu)
∂t+ ∇ · (Jc + Jd) + γ u = fu in �T , (2.1)
where �T = � × (0, T ) is the space time cylinder, with � a
bounded domain. Jc and Jd are theconvection and diffusion fluxes of
u:
Jc = ρvu, Jd = −λ∇u,
ρ is the fluid density, v is the velocity vector, λ is the
diffusion coefficient, and fu is the volumetricsource of u. Let Th
be a conforming triangulation of �, such that the intersection of
the closures oftwo distinct triangles is either empty or consists
of one common vertex or edge. We will assumethat computational
points and finite element vertices coincide (the “cell-vertex”
arrangement).We consider a dual mesh constructed on the centroids
of the triangles and the mid-points of theedges, the so-called
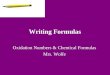
barycentric dual mesh or Donald dual mesh. Each vertex i has a
correspond-ing “complete” finite volume �i bounded by median
segments (in the case of an interior vertex)or an “incomplete”
finite volume bounded by median segments and boundary edges (in the
caseof a boundary vertex); see Fig. 1. For every �i , the integral
conservation form of PDE (2.1) iswritten as follows:∫
�i
∂(ρu)
∂td� +
∫∂�i
(Jc + Jd) · n ds +∫
�i
γ u d� =∫
�i
fu d�, (2.2)
where n is the outward unit normal to ∂�i , the boundary of �i
.
FIG. 1. Fragment of finite element (solid) and control volume
(dashed) meshes.
Numerical Methods for Partial Differential Equations DOI
10.1002/num
-
1062 VOITOVICH AND VANDEWALLE
For the representation of the FVE solution, we consider the
usual finite element space ofcontinuous piecewise polynomial
functions
Sh = {v ∈ C0(�̄) | v |T ∈ P1 ∀ T ∈ T h}, (2.3)where P1 is the
space of first degree polynomials in two variables. Finite element
space (2.3) canalso be used for the representation of spatially
varying PDE coefficients and source functions. Weshall assume that
the FVE solution uh belongs to the space ShE ,
ShE = {v ∈ Sh | v |�D= gD}, (2.4)where �D is the part of the
boundary with Dirichlet boundary condition; gD is the
correspondingfunction. The basis {ψi(x)}Ni=1 of the discrete space
Sh consists of continuous piecewise linearfunctions ψi(x) over the
triangulation T h equal to 1 at vertex xi and 0 at the other
vertices:ψi(xj ) = δij , i, j = 1, . . . , N .
The representation of uh restricted to one particular element T
∈ T h, is:
uh(x) =3∑
m=1ûmψ̂m(x) = au + bux + cuy, x ∈ T ,
where ψ̂m(x) are local linear basis functions. The coefficients
au, bu, cu can be expressed in termsof the discrete nodal unknowns
û1, û2, û3 via the inverse of the Vandermonde matrix
containingthe coordinates of the triangular nodes:
aubucu
=
1 x1 y11 x2 y2
1 x3 y3
−1 û1û2
û3
=
k11 k12 k13k21 k22 k23
k31 k32 k33
û1û2
û3
. (2.5)
The FVE method entails the numerical approximation of the
integral form (2.2) over eachcomplete or incomplete finite volume
�i of the dual mesh. The computation of these integralscan be
organized in an element by element fashion, as in the classical
finite element method. Tothat end, we introduce some more
notations. Consider a finite element T ∈ Th. Let Sk denote asegment
of the dual mesh lying on a median that emanates from the vertex k,
and let �̃l denote thebarycentric subdomain of the triangle,
adjacent to node l; we will use Ti to denote the side of
thetriangle, opposite to node i [Fig. 2(a)]. For all the balance
equations (2.2), the area integrals canbe considered
element-by-element, with the integration over barycentric
subdomains of the form�̃l . The flux integrals over the boundaries
∂�i in the equations (2.2) also can be decomposed intoelement by
element contributions, over median segments and boundary edges of
an element. Weshall denote by nνk the unit vector that is normal to
the median segment Sk and that points outwardof �̃ν [see Fig.
2(b)]. With Jνk we denote the value of the combined
convection-diffusion flux inthe direction of nνk through segment
Sk:
Jνk =∫
Sk
(Jdνk + Jcν k) · nνk ds.
It will be sufficient to approximate three of the six introduced
fluxes for the element of interest.Because of the conservation
property, we have that
J21 = −J31, J13 = −J23, J32 = −J12.We shall refer to J21, J13,
J32 as the determining fluxes of the element of interest.
Numerical Methods for Partial Differential Equations DOI
10.1002/num
-
EXACT INTEGRATION FORMULAS FOR THE FVE METHOD 1063
FIG. 2. Graphical illustration of the key notations used in the
text.
Note that for convection dominated problems the straightforward
use of the solution space ShEfor the approximation of convection
fluxes leads to oscillatory numerical results, and upwind-ing or
another stabilization is required [14, 15]. A number of such
strategies will be explorednumerically in Section V.
B. Integral Approximation Using Barycentric Coordinates
For the computation of the diffusion fluxes, we are faced with
integrals over Sk , a segment of thedual Donald mesh:
J dνk = −∫
Sk
λ∇u · nνk ds = −∇u · nνk∫
Sk
λ ds. (2.6)
Equivalently, the diffusion flux can be written as follows:
J dνk = −∫
Sk
λ∇u · nνk ds = −∫
Sk
λ∂u
∂xdy − λ∂u
∂ydx, (2.7)
in which case the segment Sk is to be traversed in the
“anti-clockwise” direction w.r.t. normal nνk .(When looking in the
direction of the normal on Sk , the segment is traversed from the
right to theleft.)
Discrete space (2.3) will be used for the local representation
of the variable diffusion coef-ficient; i.e., we shall write λ(x)
as a linear combination of the local basis functions ψ̂m(x),
or,equivalently, we can represent the interpolation function for
the diffusion coefficient in terms ofbarycentric (area)
coordinates:
λ(x) =3∑
m=1λ̂mψ̂m(x) =
3∑i=1
λ̂mLm, x ∈ T ,
where λ̂m are the nodal values of λ. The barycentric coordinates
L1, L2, L3 of a point (x, y) ∈ Tsatisfy L1 + L2 + L3 = 1, together
with
L1x̂1 + L2x̂2 + L3x̂3 = x and L1ŷ1 + L2ŷ2 + L3ŷ3 = y,where
(x̂i , ŷi) for i = 1, 2, 3 are the coordinates of the three
simplex nodes. Note that the localbasis functions and the
barycentric coordinates coincide, i.e., ψ̂m(x) = Lm, for m = 1, 2,
3 in thecase of conforming linear finite elements.
Numerical Methods for Partial Differential Equations DOI
10.1002/num
-
1064 VOITOVICH AND VANDEWALLE
Using (2.5), and nνk = (nνk,x , nνk,y)T the approximation of
(2.6) becomes
J̃ dνk = −{
3∑m=1
λ̂m
∫Sk
Lm ds
}3∑
l=1(k2lnνk,x + k3lnνk,y)ûl . (2.8)
When the alternative formulation (2.7) is used, the following
expression results:
J̃ dνk = −{
3∑m=1
λ̂m
∫Sk
Lm dy
}3∑
l=1k2l ûl +
{3∑
m=1λ̂m
∫Sk
Lm dx
}3∑
l=1k3l ûl . (2.9)
To complete the approximation, one should introduce integration
formulas for the integration ofbarycentric coordinates over the
dual mesh line segments:∫
Sk
Lm ds,∫
Sk
Lm dx,∫
Sk
Lm dy, k, m = 1, 2, 3. (2.10)
These formulas can also form a basis for the upwind
discretization of the convection fluxes; e.g.,assume that the
approximation of the convection fluxes is based on a weighting of
local massfluxes with the use of upwind values of the discrete
unknowns ũk [15]:
J̃ cνk = ũk∫
Sk
ρv · nνk ds, (2.11)
and ũk is a linear combination of the local discrete unknowns.
Obviously, the local mass flux, i.e.,the integral in the right-hand
side of (2.11), should be calculated as exactly as possible.
Assumethe components of vector ρ(x)v(x) vary linearly over each
simplex:
ρ(x)v(x) =3∑
i=1ρ̂i v̂i Li , (2.12)
where ρ̂i and v̂i are nodal values of density and nodal velocity
vectors, respectively. To completethe approximation, the values of
(2.10) are then again required. Sometimes a linear
representationfor both the velocity and the density is considered
essential, for example, in order to capture sharpgradients.
Hence,
ρ(x) =3∑
i=1ρ̂i Li , v(x) =
3∑i=1
v̂i Li ,
instead of (2.12). Now, in order to compute the fluxes in
(2.11), integrals are required formonomials of the second
order:∫
Sk
LνLµ ds, k, ν, µ = 1, 2, 3. (2.13)
Analogously, the approximation of the reaction, source and
unsteady terms requires theconstruction of formulas for the
integration of monomials in barycentric coordinates over
thebarycentric subdomains of the simplices, e.g., of type,∫
�̃k
Lν d� and∫
�̃k
LνLµ d�, k, µ, ν = 1, 2, 3. (2.14)
Numerical Methods for Partial Differential Equations DOI
10.1002/num
-
EXACT INTEGRATION FORMULAS FOR THE FVE METHOD 1065
The use of a linear representation of the source term in terms
of barycentric coordinates,fu(x) = ∑3i=1 f̂i Li , x ∈ T , requires
formulas of type (2.14) (left). For the approximation ofsource
terms that are products of two functions (would we decide to
represent each function withthe use of continuous linear elements),
or in case the source function is locally represented as ahigher
order (in casu second order) polynomial, it is necessary to
introduce the formulas of type(2.14) (right). Similar integrals
arise in the computation of the local FVE mass matrices,
whichcorrespond to the unsteady and reaction terms.
Finally, the FVE approximation of boundary conditions is based
on formulas for the integrationof barycentric coordinates over
boundary edges.
C. Summary
The success of the use of barycentric coordinates for the exact
integration of polynomials in theclassical finite element method
lies partly in the availability of exact integration formulas
forintegrals along the edges L and the area A of a triangular
element, and over the volume V of atetrahedron; see [12]: ∫
L
La1 Lb2 dL =
a! b!(a + b + 1)! |L|, (2.15)
∫A
La1 Lb2 L
c3 dA =
a! b! c!(a + b + c + 2)! 2 |A|, (2.16)
∫V
La1 Lb2 L
c3 L
d4 dV =
a! b! c! d!(a + b + c + d + 3)! 6 |V |. (2.17)
Our aim is to derive similar formulas applicable to the FVE
method. Thus, in the 2D case, wewill need to derive expressions for
three types of integrals:∫
Sk
La1 Lb2 L
c3 ds,
∫�̃k
La1 Lb2 L
c3 d�,
∫�∩�i
La1 Lb2 ds,
i.e., for the integration of monomials in simplex barycentric
coordinates over dual mesh lines,over barycentric subdomains, and
over boundary edge segments, respectively. Those integralswill
provide a technological basis on which one can construct FVE
solvers, in a similar way as(2.15)–(2.17) form the basis for the
development of finite element solvers.
III. FINITE VOLUME ELEMENT INTEGRATION IN 2D
A. Integration over Barycentric Subdomains
We start off with the exact evaluation of the integrals of the
monomials of barycentric coordinatesover barycentric subdomains,
i.e., the integral:∫
�̃k
La1 Lb2 L
c3 d� =
∫�̃k
La1 Lb2 (1 − L1 − L2)c d�. (3.1)
First, we will find the integration boundaries of the
coordinates L1, L2 within the barycentricsubregion �̃1. To that
end, we consider the images of lines of equal value of L1 on the
planarsurface z = L2, where z is the coordinate direction
orthogonal to the plane of the mesh (seeNumerical Methods for
Partial Differential Equations DOI 10.1002/num
-
1066 VOITOVICH AND VANDEWALLE
FIG. 3. Limits for the integration over barycentric subdomain
�̃1: images of the lines of equal value of thefirst coordinate L1
on the surface of the second coordinate L2.
Fig. 3). We also need the relationship between the barycentric
coordinates on the segments of thedual mesh. This relationship has
to be linear, i.e., of the form:
Lν(Lµ) = a(k)νµ + b(k)νµ Lµ on Sk , k, ν, µ = 1, 2, 3.The
result, with ν �= µ, is given by:
on Sk: Lν(Lµ) =
Lµ if ν �= k and µ �= k,1 − 2Lµ if ν = k,12 (1 − Lµ) if µ =
k.
(3.2)
Using (3.2) and the expression for the differential element
d� = 2 |T | dL1 dL2,with |T | the area of the triangle, one can
obtain the following expression:∫
�̃k
La1Lb2L
c3 d� = 2 |T |
∫ 12
13
dL1
∫ L11−2 L1
La1 Lb2 (1 − L1 − L2)c dL2
+ 2 |T |∫ 1
12
dL1
∫ 1−L10
La1 Lb2 (1 − L1 − L2)c dL2. (3.3)
Here, the first integral of the right-hand side corresponds to
the triangle EMC and the second oneto the triangle V1ME on the
surface of L2 (see Fig. 3). The substitution t = L2/(1 − L1) to
theright-hand side integrals of (3.3) gives
∫�̃k
La1Lb2L
c3 d� = 2 |T |
∫ 12
13
La1(1 − L1)b+c+1∫ L1
1−L11−2L11−L1
tb(1 − t)cdt dL1
+ 2 |T |∫ 1
12
La1(1 − L1)b+c+1 dL1∫ 1
0tb(1 − t)c dt .
Numerical Methods for Partial Differential Equations DOI
10.1002/num
-
EXACT INTEGRATION FORMULAS FOR THE FVE METHOD 1067
We will not attempt to evaluate the integrals in general form in
terms of a, b, c. Rather,we will concentrate on the relevant cases.
Calculation of the integrals for (a, b, c) ∈{(1, 0, 0), (0, 1, 0),
(0, 0, 1)} gives the following result:
∫�̃k
Lν d� ={
1154 |T | if ν = k,7
108 |T | if ν �= k.(3.4)
Calculation of the integrals for the monomials of second order
gives
∫�̃k
LνLµ d� =
85648 |T | if ν = µ = k,23
1296 |T | if ν = µ �= k,47
1296 |T | if ν �= µ and (ν = k or µ = k),7
648 |T | otherwise.(3.5)
The values of 1/|T | ∫�̃k
Lν Lµ d� are summarized in Appendix A.
B. Integration over Dual Mesh Segments
Next, we consider the exact integration of interpolation
polynomials over median segments. Thoseintegrals appear in the
approximation of the convection and diffusion fluxes. We start with
thecomputation of the following line integral:∫
Sk
La1 Lb2 L
c3 ds =
∫Sk
La1 Lb2 (1 − L1 − L2)c ds.
Without loss of generality, we will consider integration over
segment S1. Let r denote the positionvector of a point on S1, and
let the triangle T be defined by the points r1, r2, r3. Then, we
haver = L1r1 + L2r2 + L3r3, with L3 = L2 and L2 = 12 (1 − L1), for
L1 ∈ [0, 1/3]. Thus, we find
ds = |r′(L1)| dL1 = 3 |S1| dL1,where |S1| is the length of the
median segment. The general expression for the differential
elementreads
on Sk: ds ={
3 |Sk| dLµ if µ = k,6 |Sk| dLµ if µ �= k. (3.6)
With (3.6) and (3.2), one can integrate each of the generic
monomials over the different dualmesh lines. For the first order
case we have∫
S1
L1ds =∫ 1
3
0L1|r′(L1)| dL1 = 1
6|S1|,
∫S1
L2ds =∫ 1
3
0
1
2(1 − L1)|r′(L1)| dL1 = 5
12|S1|,
and∫
S1L2 ds =
∫S1
L3 ds. The following general rule results:
∫Sk
Lνds ={
16 |Sk| if ν = k,5
12 |Sk| if ν �= k.(3.7)
Numerical Methods for Partial Differential Equations DOI
10.1002/num
-
1068 VOITOVICH AND VANDEWALLE
FIG. 4. Integration of the barycentric coordinates over the dual
mesh segments.
For an implementation based on the “dx”, “dy” form of the
integrals, using, e.g., the expressionfrom (2.7), formulas similar
to (3.7) can be derived. For ξ ∈ {x, y}, we have
∫Sk
Lνdξ ={
16 lkξ if ν = k,5
12 lkξ if ν �= k.(3.8)
Here, lkx and lky are the signed lengths of the projections of
the median segment Sk onto the x-and y-axis, respectively; see Fig.
4 (left panel). In particular, we have lkx = xend − xstart , andlky
= yend − ystart . The points (xstart , ystart ) and (xend , yend)
delineate segment Sk , and indicate itsorientation, i.e., the
direction of the integration.
Formulas (3.7) and (3.8) have a simple geometrical
interpretation, as illustrated in Fig. 4 (rightpanel). Consider the
plane z = L1, and imagine a pair of trapezoids and a triangle,
constructedusing the median segments and their images on the
surface of that plane. The line integrals from(3.7) represent the
area of the trapezoids and the triangle. Considering the value 1/3
for L1 atthe centroid of the element and the value 1/2 at the
middle of the edges T2 and T3, the cor-rectness of (3.7) is easily
verified. For (3.8), one should project the triangle onto the zx
and yzcoordinate planes. The area of those projections is given by
16 |l1x | and 16 |l1y |, i.e., the absolutevalues of
∫S1
L1dx and∫
S1L1dy, respectively. Projection of the trapezoid corresponding
to S2
onto the same coordinate planes, gives areas of magnitude 512
|l2x | and 512 |l2y |, i.e., the absolutevalues of integrals
∫S2
L1dx,∫
S2L1dy, respectively. Analogous results hold for the projection
of
the trapezoid corresponding S3.With (3.2) and (3.6), one also
obtains formulas for second order monomials:
∫Sk
LνLµ ds =
127 |Sk| if ν = µ = k,7
108 |Sk| if ν �= µ and (ν = k or µ = k)19
108 |Sk| otherwise,(3.9)
where k = 1, 2, 3. In case ds is replaced by dξ , with ξ ∈ {x,
y}, the formulas in (3.6) need to beadapted by replacing |Sk| with
lkξ . In Appendix B, we have summarized the values of the
integrals1/|Sk|
∫Sk
LνLµds.
Numerical Methods for Partial Differential Equations DOI
10.1002/num
-
EXACT INTEGRATION FORMULAS FOR THE FVE METHOD 1069
FIG. 5. Implementation of the boundary conditions: integration
over boundary edge sections.
C. Integration over Segments of Boundary Edges
The FVE implementation of boundary conditions requires the exact
integration of monomials oversegments of boundary edges. We
consider two incomplete finite volumes that share a simplex T(Fig.
5). Let T3 be the edge of the element that approximates the
boundary and |T3| be its length.For the first order monomials we
have the result:
∫�i∩T3
Lν ds ={
38 |T3| if i = ν,18 |T3| if i �= ν.
(3.10)
Obviously, one has that∫
�i∩T3 L3 ds = 0, i = 1, 2. Similarly, one can obtain the
followingformulas for the integration of monomials of the second
order:
∫�i∩T3
L2ν ds ={
724 |T3| if i = ν,1
24 |T3| if i �= ν.(3.11)
Finally, one has ∫�i∩T3
L1L2 ds = 112
|T3|. (3.12)
If in any of the above integrals ds is changed into dξ , the
formulas have to be adapted by changing|T3| into lξ , the signed
length of the projection of edge T3 onto the ξ -axis.
IV. FINITE VOLUME ELEMENT INTEGRATION IN 3D
A. Introduction and Notations
We consider a PDE defined on a 3D domain �. Let Th be
triangulation of �: ∪Tn∈Th T̄n = �̄,i.e., a set of tetrahedral
elements (tetrahedrons) such that the intersection of the closures
of twodistinct elements is either empty or consists of one common
vertex, side, or edge. As before,we will assume a cell-vertex
arrangement of unknowns, i.e., the computational points and
thetetrahedron vertices coincide. For the given triangulation, we
construct the barycentric dual mesh,consisting of finite volumes
constructed with the use of the centroids of the tetrahedral
elements,the midpoints of the element edges and the centroids of
the sides. Thus, any vertex of the 3Dtriangulation has a
corresponding complete (or incomplete) control volume, bounded by
parts ofmedian planes.
Numerical Methods for Partial Differential Equations DOI
10.1002/num
-
1070 VOITOVICH AND VANDEWALLE
Consider a tetrahedron T in Th. Let T (i) denote the side of the
tetrahedron, that is opposite tothe vertex i, with i = 1, 2, 3, 4.
Let �̃i stand for the barycentric subdomain (or “quarter”
element)adjacent to node i (Fig. 6); let Eij denote the edge
connecting vertices i and j ; (x̄ij , ȳij , z̄ij ) arethe
coordinates of the midpoint of the edge Eij ; (x̂i , ŷi , ẑi )
are the coordinates of the barycenter ofthe side T (i); we shall
use (xc, yc, zc) to denote the coordinates of the centroid of the
tetrahedron.
In this section, we are faced with the calculation of integrals
of the following types:∫�̃k
P (x) d�,∫
S(q)p
P (x) dS, and∫
SpqP (x) dS, where P(x) = La1Lb2Lc3Ld4 . The region Spq is a
quadrilateral of the dual surface that lies on the median plane
coming out of edge Epq [seeFig. 8(a)]; S(q)p is the 2D barycentric
subdomain of the side opposite to node q, and adjacent tonode p
(see Fig. 9).
B. Integration over Barycentric Subdomains
For the approximation of source terms and for the evaluation of
the FVE method mass matrix,one needs the following integrals,
similar to (3.1),∫
�̃k
La1Lb2L
c3L
d4 d� =
∫�̃k
La1Lb2L
c3(1 − L1 − L2 − L3)d d�. (4.1)
Without loss of generality, we can consider the integration over
the barycentric subdomain �̃1only. The differential element d� can
be expressed as follows:
d� = 6|T | dL1 dL2 dL3,
with |T | equal to the volume of the tetrahedron. As in the 2D
case, the integral is split into twocontributions. The first
corresponds to the changes of L1 from 12 to 1 (the tetrahedron
V1P12P13P14;Fig. 6):
6|T |∫ 1
12
dL1
∫ 1−L10
dL2
∫ 1−L1−L20
La1Lb2L
c3(1 − L1 − L2 − L3)d dL3. (4.2)
The other part corresponds to the rest of the subdomain, where
L1 changes from 14 to12 :
6|T |∫ 1
2
14
dL1
∫ φ(L1)ψ(L1)
dL2
∫ χ(L1,L2)κ(L1,L2)
La1Lb2L
c3(1 − L1 − L2 − L3)d dL3. (4.3)
On its turn, the last integral is split into three
contributions: the first contribution corresponds tothe pyramid
C3C4P13P14P12, the second one to the pyramid C3C4P13P14C2, and the
last one to thetetrahedron C2C3C4C. In order to find the
integration limits for each particular case, one needsto perform
two steps.
First, in order to derive the functions κ(L1, L2) and χ(L1, L2)
one should find the variation ofL3 for fixed L1 and L2. The image
of the variation corresponds to the intersection of planes ofequal
values for L1 and L2 (see Fig. 7). These are lines that are
parallel to edge E34. Considerationof those lines with the use of
the equations for the tetrahedron sides and the median planes,
leadsto κ(L1, L2) and χ(L1, L2). Second, in order to find the
functions ψ(L1) and φ(L1) for eachsubvolume, one should consider a
projection of the subvolume onto the side T(3) (i.e., L3 =
0),parallel to E34 (i.e., L1 and L2 constant). In that projection,
one can find the integration limits forL2 that correspond to a
fixed value of L1. The projection of pyramid C3C4P13P14P12 is
triangle
Numerical Methods for Partial Differential Equations DOI
10.1002/num
-
EXACT INTEGRATION FORMULAS FOR THE FVE METHOD 1071
FIG. 6. A tetrahedron. Indicated are the centroid C, the
centroids of the side planes Ci , the midpoints ofthe edges Pij and
the tetrahedron vertices Vi , annotated with their barycentric
coordinates. Shown also arethe location of the barycentric
subvolumes �̃i and their side planes.
C3P12P14, the projection of pyramid C3C4P13P14C2 is triangle
C̃2C3P14, the projection of thetetrahedron C2C3C4C is triangle
C̃2C3C̃. Here, the auxiliary points C̃ and C̃2 have the
followingbarycentric coordinates: C̃
(14 ,
14 , 0,
12
), C̃2
(13 , 0, 0,
23
).
Finally, taking into consideration integral (4.2), one obtains
the following result: integral (4.1),denoted as I(4.1), is composed
of a sum of 4 terms:
I(4.1) = 6|T |∫ 1
12
dL1
∫ 1−L10
dL2
∫ 1−L1−L20
La1Lb2L
c3(1 − L1 − L2 − L3)d dL3
+ 6|T |∫ 1
2
13
dL1
∫ L11−2L1
dL2
∫ 1−L1−L20
La1Lb2L
c3(1 − L1 − L2 − L3)d dL3
Numerical Methods for Partial Differential Equations DOI
10.1002/num
-
1072 VOITOVICH AND VANDEWALLE
FIG. 7. Planes of equal values of L1 (a) and L2 (b).
+ 6|T |∫ 1
3
14
dL1
∫ L11−3L1
dL2
∫ L11−2L1−L2
La1Lb2L
c3(1 − L1 − L2 − L3)d dL3
+ 6|T |∫ 1
2
13
dL1
∫ 1−2L10
dL2
∫ L11−2L1−L2
La1Lb2L
c3(1 − L1 − L2 − L3)d dL3. (4.4)
We will not evaluate (4.4) in terms of general a, b, c, d.
Instead, we only present the results forthe relevant cases. We have
for the first order monomials:∫
�̃k
Lνd� ={
25192 |T | if ν = k,23576 |T | if ν �= k,
(4.5)
and for the monomials of second order,
∫�̃k
LνLµ d� =
831152 |T | if ν = µ = k,
16117280 |T | if ν = µ �= k,67
3456 |T | if ν �= µ and (ν = k or µ = k),97
17280 |T | otherwise.(4.6)
The values of the integral 1/|T | ∫�̃k
Lν Lµ d� are given in Appendix C.
C. Integration over Quadrilaterals of Dual Median Planes
We now consider the computation of the following
integral:∫Spq
La1Lb2L
c3L
d4 dS. (4.7)
Let the tetrahedron T be defined by the four points r1, r2, r3,
r4. Any position vector r in thetetrahedron can be written as r =
L1r1 + L2r2 + L3r3 + L3r4, where the barycentric
coordinatesNumerical Methods for Partial Differential Equations DOI
10.1002/num
-
EXACT INTEGRATION FORMULAS FOR THE FVE METHOD 1073
FIG. 8. A median plane, emanating from edge E12, and
quadrilateral part S12 (a); surface parametrization:partial
derivatives of the position vector r(2)1 = ∂r/∂L1, r(1)2 = ∂r/∂L2
(b).
L1, L2, L3, L4 range from 0 to 1, and satisfy L1 + L2 + L3 + L4
= 1. With r(k)i , we denotethe vector in the tetrahedron side T
(k), starting at the middle of the edge opposite to node i
andending at the node i [Fig. 8(b)].
It suffices to consider the integration over S12 only. We will
use the barycentric coordinatesL1 and L2 for the parametrization of
that surface. Recall that L3 = L4 on the surface, henceL3 = (1 − L1
− L2)/2. Therefore, a point r on S12 is given by
r = L1r1 + L2r2 + 12(1 − L1 − L2)(r3 + r4), (4.8)
and the partial derivatives of the position vector with respect
to L1, L2 will be
∂r∂L1
= r1 − 12(r3 + r4) = r(2)1 and
∂r∂L2
= r2 − 12(r3 + r4) = r(1)2 .
Note that the vectors r(2)1 and r(1)2 are parallel to the
barycentric coordinate lines, i.e., the lines
with L2, resp. L1 equal to a constant. The computation of the
integrals over S12 requires one tofind the differential element,
i.e.,
dS =∣∣∣∣ ∂r∂L1 ×
∂r∂L2
∣∣∣∣ dL1 dL2.Knowing that, in the case of barycentric dual
mesh,
−−−→P34C2 = 13 r(2)1 ,
−−−→P34C1 = 13 r(1)2 ,
−−→P34C =
14
(r(1)2 + r(2)1
)(see Fig. 6), one can compute the area of S12 to find:
|S12| = 112
∣∣∣∣ ∂r∂L1 ×∂r∂L2
∣∣∣∣ .Numerical Methods for Partial Differential Equations DOI
10.1002/num
-
1074 VOITOVICH AND VANDEWALLE
Therefore, dS = 12 |S12| dL1 dL2. Thus, integral (4.7) for (p,
q) = (1, 2) becomes∫S12
La1Lb2L
c3L
d4 dS =
12 |S12|2c+d
∫D12
La1Lb2(1 − L1 − L2)c+d dL1 dL2,
where D12 is the range of L1, L2 on the surface S12. We find
∫S12
La1Lb2L
c3L
d4 dS =
12 |S12|2c+d
∫ 14
0dL1
∫ 13 − 13 L1
0La1L
b2(1 − L1 − L2)c+d dL2
+ 12 |S12|2c+d
∫ 13
14
dL1
∫ 1−3L10
La1Lb2(1 − L1 − L2)c+d dL2. (4.9)
Consider the monomials of the first order. A careful calculation
of the two integrals in theright-hand side of (4.9), for all the
barycentric coordinates, and for the six dual quadrilaterals,leads
one to the following general expression:∫
Spq
Lν dS ={
5432 |Spq | if ν = p or ν = q,13
432 |Spq | otherwise,(4.10)
where |Spq | is the area of Spq . For the monomials of the
second order we find
∫Spq
LνLµ dS =
23864 |Spq | if ν = µ = p or ν = µ = q,5
288 |Spq | if ν = p and µ = q or µ = p and ν = q,115864 |Spq |
if ν �= p and ν �= q and µ �= p and µ �= q,41
864 |Spq | otherwise.These results, without the coefficient |Spq
|, are tabulated in Appendix D.
The implementation of the FVE method may require evaluation of
surface integrals writtenin “dy dz”, “dz dx”, or “dx dy” form,
rather than in “dS” notation. Such formulation is notuncommon,
e.g., for the diffusion flux:∫
Spq
λ∇u · n dS =∫
Spq
λ∂u
∂xdy dz + λ∂u
∂ydz dx + λ∂u
∂zdx dy. (4.11)
In the right-hand side, Spq is now to be interpreted as a part
of the median plane oriented by thenormal n. Note that one should
identify a unique “determining” normal from the two normals thatare
associated with the median plane, to have a procedure for
evaluation of local contributionsof the tetrahedron onto the global
discrete analogue of the problem. Consideration of the
vectorproducts of the vectors r(j)i allows one to do that: one can
use the condition j > i to select 6determining normals from the
set{
(r(j)i × r(i)j )/|r(j)i × r(i)j |, i, j = 1, 2, 3}.
We discuss the integration over S12. Assume the determining
normal is chosen as (r(2)1 ×
r(1)2 )/|r(2)1 × r(1)2 |. Let Syz12 , Szx12 , Sxy12 be the
signed areas of the projections of S12 onto the yz-, zx-,and
xy-coordinate planes, respectively, i.e.,
Sxy
12 =∫
S12
dx dy, (4.12)
Numerical Methods for Partial Differential Equations DOI
10.1002/num
-
EXACT INTEGRATION FORMULAS FOR THE FVE METHOD 1075
with a sign corresponding to the determining normal of S12. The
calculation is performed with theuse of a decomposition of the
quadrilateral into two triangles, e.g., S12 = (CP34C2)∪(CP34C1)(see
Fig. 6). We use the following order of the points in the triangles:
P34CC1, and P34C2C. Thatis, the orientation is anticlockwise as
seen from the top of the determining normal. For the signedarea of
the projection we then have
Sxy
12 =1
2
∣∣∣∣∣∣1 x̄34 ȳ341 xc yc1 x̂1 ŷ1
∣∣∣∣∣∣ +1
2
∣∣∣∣∣∣1 x̄34 ȳ341 x̂2 ŷ21 xc yc
∣∣∣∣∣∣ . (4.13)
Calculation of the integrals appearing in (4.11) requires one to
introduce integration formulasof the following type, which are the
analogues of (4.10),
∫Spq
Lν dx dy ={
5432S
xypq if ν = p or ν = q,
13432S
xypq otherwise.
(4.14)
Here Sxypq is the signed area of the projection of Spq onto the
xy-plane, defined in a similar way as(4.12), and computed according
to a formula similar to (4.13). Similar relations are valid for
the“dy dz” and “dz dx” integrals and for the second order
monomials.
D. Implementation of Boundary Conditions
The approach developed in the previous section for the
calculation of the surface integrals, canalso be applied for the
implementation of the boundary conditions. Let S(i)k denote the
barycentricsubdomain of side T (i) adjacent to node k (see Fig. 9).
Without loss of generality, we consider
FIG. 9. Implementation of boundary conditions: integration over
barycentric subdomains of boundarysides; parametrization of the
subdomains.
Numerical Methods for Partial Differential Equations DOI
10.1002/num
-
1076 VOITOVICH AND VANDEWALLE
integration of monomials of the form Lb2Lc3L
d4 over barycentric subdomain S
(1)2 . We shall use
barycentric coordinates L3 and L4 for the parametrization of
this surface. Let s(ν)
ij denote the vec-tor in the side of the tetrahedron opposite to
the node ν, directed from vertex i to vertex j . Onecan find
that
s(1)23 = ∂r/∂L3, s(1)24 = ∂r/∂L4.With an argument similar to
that in the previous section, and denoting by |S(1)2 | the area of
S(1)2 ,one finds that the differential element is
dS =∣∣∣∣ ∂r∂L3 ×
∂r∂L4
∣∣∣∣ dL3 dL4 = 6 |S(1)2 | dL3 dL4.After determination of the
integration limits, the integral of interest becomes
∫S(1)2
Lb2 Lc3 L
d4 dS = 6 |S(1)2 |
∫ 13
0dL3
∫ 12 − 12 L3
0(1 − L3 − L4)bLc3Ld4 dL4
+ 6 |S(1)2 |∫ 1
2
13
dL3
∫ 1−2L30
(1 − L3 − L4)b Lc3Ld4 dL4.
Calculation of all the integrals for the monomials of the first
order gives
∫S(i)k
Lν dS =
0 if ν = i,1118 |S(1)2 | if ν = k,736 |S(1)2 | if ν �= k, ν �=
i.
(4.15)
Let S(1)yz2 , S(1)zx2 , S
(1)xy2 be the signed areas of the projections of subdomain S
(1)2 onto the coor-
dinate planes, with the sign corresponding to the normal
specified in the boundary condition term.Then, formulas analogous
to (4.15) and written in terms of the signed areas are valid, e.g.,
withdS and |S(1)2 | replaced by dx dy resp. S(1)xy2 .
V. NUMERICAL EXPERIMENTS
Finally, we end this article with some numerical results. The
first example is purely academicand merely serves to illustrate the
correctness of our formulas. The second example is a lin-ear
convection-diffusion problem, whose solution exhibits a boundary
layer. The third and lastexample is a classical nonlinear problem:
laminar flow over a backward facing step. The last twoexamples
illustrate two different upwinding strategies.
A. 3D Pure Diffusion Problems
Recall that the present article extends the 2D results that were
presented in [14]. Here, a new andmore general procedure has been
developed that one can use for a much wider class of integrals.For
the 2D case, the correctness of the formulas for the integration of
monomials of the first
Numerical Methods for Partial Differential Equations DOI
10.1002/num
-
EXACT INTEGRATION FORMULAS FOR THE FVE METHOD 1077
TABLE I. Constant coefficient diffusion problem: discrete L2 and
L∞ error norms and estimated order ofconvergence (EOC).
1/h ‖u−uh‖2
‖u‖2 EOC‖u−uh‖∞
‖u‖∞ EOC
10 3.04232e-2 — 3.01895e-2 —20 7.84089e-3 1.95608 7.73328e-3
1.9649340 1.97566e-3 1.98868 1.94514e-3 1.9912180 4.94915e-4
1.99708 4.87039e-4 1.99777
order has been checked in the above reference. To check the
correctness of the 3D formulas,we implemented a constant
coefficient and a variable coefficient diffusion problem. The
formerreads
−∂2u
∂x2− ∂
2u
∂y2− ∂
2u
∂z2= f (x, y, z), (x, y, z) ∈ � = (0, 1) × (0, 1) × (0, 1),
where f is chosen in such a way that u(x, y, z) = sin(πx)
sin(πy) sin(πz). HomogeneousDirichlet boundary conditions are set
at the six boundary faces.
In the numerical experiments we used sequences of embedded
regular 3D triangulations of theunit cube. Our regular
triangulation is the result of a domain decomposition into cubes
and subse-quent regular subdivision of each of those into 6
tetrahedral elements. For the local representationof the variable
source function, a continuous piecewise linear approximation is
used, allowing usto check, e.g., the correctness of (4.5). Discrete
norms of the error and corresponding values ofthe experimental
order of convergence are given in Table I. They match well with the
expectedvalue of 2.
The second model problem is defined on the same spatial domain
and characterized by avariable diffusion coefficient,
−∇ · (λ(x, y, z)∇u) = f (x, y, z), (x, y, z) ∈ �,
with λ(x, y, z) = 1 + x + y. The function f (x, y, z) is chosen
such that the exact solutionis given by u(x, y, z) = e2x + e2y +
e2z. Dirichlet boundary conditions are set at all bound-aries. This
experiment allows us to check, among other things, the validity of
the formulas(4.10), for the exact integration of the barycentric
coordinate monomials over parts of themedian planes. Discrete norms
of the error and values of the experimental order of convergenceare
presented in Table II. Again, they behave according to the theory,
i.e., with second-orderconvergence.
TABLE II. Variable coefficient diffusion problem: discrete L2
and L∞ error norms and estimated order ofconvergence (EOC).
1/h ‖u−uh‖2
‖u‖2 EOC‖u−uh‖∞
‖u‖∞ EOC
10 2.27738e-4 — 2.35071e-4 —20 5.91379e-5 1.94522 6.04551e-5
1.9591640 1.49264e-5 1.98621 1.51472e-5 1.9968180 3.74055e-6
1.99654 3.78890e-6 1.99920
Numerical Methods for Partial Differential Equations DOI
10.1002/num
-
1078 VOITOVICH AND VANDEWALLE
B. Convection-Diffusion Problem with Solution of Boundary-Layer
Type
Next, we consider a 2D convection-diffusion problem with a small
diffusion parameter α:
∂2u
∂x2+ ∂
2u
∂y2− v
α
∂u
∂x= 0, (x, y) ∈ � = (0, 1) × (0, 1),
combined with Dirichlet boundary conditions.The exact solution
exhibits a boundary-layer in the neighborhood of x = 1:
u(x, y) = sin πyea − eb (e
a+bx − eb+ax),
with the constants a and b given by
a = v2α
+(
v2
4α2+ π 2
)1/2, b = v
2α−
(v2
4α2+ π 2
)1/2.
The approximation of the convection fluxes is based on the
concepts of local weight matricesand upwinding; see [15]. For each
simplex the convection fluxes are approximated by means offormula
(2.11), where ũk is a value associated with the median segment Sk
. It is computed as alinear combination of the local discrete
unknowns ûi :
ũk =3∑
i=1βki ûi , (5.1)
or in matrix form ũ = Bû. The three by three matrix B is the
local weight matrix and fully char-acterizes the particular upwind
scheme; vector ũ is the three-vector of the conservative
unknownvalues associated with the three median segments of the
simplex, and û is the vector of conservativeunknowns located at
the vertices.
For the numerical experiments, we consider two different upwind
schemes. In the flow-orientedmodified upwind scheme (FLOM), a
profile for the solution u is constructed that is exponentialin the
direction of the average advection velocity vector and linear in
the normal direction. Theuse of such a profile for upwinding
methods was introduced by C. Prakash and S. Patankar in[7]. With
that profile, the components of ũ can be expressed in terms of the
discrete unknowns.To this end, the profile at the midpoints of the
median segments is evaluated with the use of theinterpolation
condition at the three vertices. In the second approach, the matrix
B is calculatedusing the mass-weighted upwind scheme (MAW), as
introduced by G. Schneider and M. Raw [16]and extended for the case
of simplicial meshes by S. Rida [17]. Note that this scheme is
monotoneby construction. For both the MAW and FLOM schemes, the
local mass fluxes
∫Sk
ρv · nνk ds areapproximated with the assumption that components
of the advection velocity vector vary linearlyover each triangle;
see (2.12).
Figure 10(a) presents the solutions for the two different upwind
schemes, for three differentvalues of the local Peclet number, Pe
:= vh/α, where h = 1/20 is the mesh size. The solutionto the
problem with the steepest boundary layer is recomputed in Fig.
10(b) on a finer mesh withh = 1/50. The values of the discrete
L2-error norms and the experimental orders of convergenceare
presented in the Table III. The mass-weighted scheme is clearly
first order, the modifiedflow-oriented scheme is second-order
accurate.
Numerical Methods for Partial Differential Equations DOI
10.1002/num
-
EXACT INTEGRATION FORMULAS FOR THE FVE METHOD 1079
FIG. 10. Computed solutions u(x, 0.5) for different upwind
schemes: for different local Peclet numbers,21 × 21 uniform
triangulation (a), 51 × 51 uniform triangulation (b).
C. Laminar Flow over a Backward-facing Step
Finally, we consider the FVE modelling of laminar
incompressible, planar flow over abackward-facing step. The model
is given by the Navier-Stokes equations:
∂(ρu)∂t
+ ∇ · (ρu ⊗ u − τ) = −∇p + f , ∂ρ∂t
+ ∇ · (ρu), in �T , (5.2)
where �T = � × (0, T ) is the space-time cylinder, u is the
velocity vector, p is the pressure, τis the viscous shear stress
tensor, ρ is the density, and f is a given force.
TABLE III. Discrete L2 error norm for the solutions computed
with different upwind schemes, andestimated order of convergence
(EOC).
1/h MAW EOC FLOM EOC
v/α = 10/320 3.241E-3 — 2.632E-4 —40 1.570E-3 1.045 6.714E-5
1.97180 7.708E-4 1.026 1.692E-5 1.988
160 3.816E-4 1.014 4.249E-6 1.994320 1.898E-4 1.007 1.069E-6
1.990
v/α = 50/320 1.642E-2 — 1.799E-3 —40 9.730E-3 0.755 4.689E-4
1.94080 5.279E-3 0.882 1.192E-4 1.976
160 2.747E-3 0.942 3.009E-5 1.986320 1.401E-3 0.971 7.567E-6
1.992
v/α = 250/320 1.052E-2 — 9.929E-3 —40 1.371E-2 −0.382 8.445E-3
0.23480 1.378E-2 −0.017 4.154E-3 1.024
160 1.021E-2 0.442 1.340E-3 1.632320 6.178E-3 0.724 3.588E-4
1.901
Numerical Methods for Partial Differential Equations DOI
10.1002/num
-
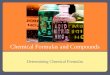
1080 VOITOVICH AND VANDEWALLE
FIG. 11. Laminar flow over a backward-facing step. Experimental
and calculated velocity profiles forRe = 389 at different
locations; �: experiment Armaly et al.; –: FVE/FLOM solution.
For the numerical solution of system (5.2) the pressure and
velocity components are consideredas the unknowns. A collocated,
equal-order scheme is used, i.e., both pressure and velocity
arecalculated at the same points, the vertices of the
triangulation, and are assumed to be piecewise-linear and
continuous; the Prakash-Patankar interpolation [5, 7] of the
velocity components inthe continuity equation is used in order to
prevent checkerboard pressure fields. The SIMPLERscheme is applied
as the overall solution scheme for this coupled, nonlinear system
of equations.
A numerical experiment was set up using the parameter values
specified in the backward-facingstep benchmark paper by B. Armaly
et al. [18]. The case considered corresponds to Reynolds num-ber Re
= 389, which is the maximal value for the planar flow regime for
which the experimentaldata are reported in the above article. In
accordance with [18], the upstream channel height isselected to be
5.2 mm and the step height S = 4.9 mm. The outlet boundary is at a
distanceof 32S downstream of the step. No-slip boundary conditions
are imposed at the wall bound-aries; a parabolic longitudinal
velocity profile approximating the experimental one is used at
theinlet boundary. The components of the viscous stress tensor are
imposed to vanish at the outletboundary.
Steady-state longitudinal velocity profiles, computed with the
flow-oriented modified upwindscheme are presented in Fig. 11. The
close match with the data from article [18] is obvious.
Thetriangulation consisted of 1594 nodes, with a refinement near
the walls and the separation line.The reattachment point calculated
with the use of the flow-oriented upwind scheme is given bythe
value 7.813S. This is in excellent agreement with the experimental
value of 7.81S. A similarcomputation with the mass-weighted upwind
scheme gives the less accurate result 7.217S.
APPENDIX A. Integration of monomials of barycentric coordinates
of the second order over thebarycentric subdomains �̃1, �̃2, and
�̃3.
�̃1 L1 L2 L3 �̃2 L1 L2 L3 �̃3 L1 L2 L3
L185
64847
129647
1296 L123
129647
12967
648 L123
12967
64847
1296
L147
129623
12967
648 L247
129685648
471296 L2
7648
231296
471296
L147
12967
64823
1296 L37
64847
129623
1296 L347
129747
129685648
Numerical Methods for Partial Differential Equations DOI
10.1002/num
-
EXACT INTEGRATION FORMULAS FOR THE FVE METHOD 1081
APPENDIX B. Integration of monomials of barycentric coordinates
of the second order over the mediansegments S1, S2, and S3.
S1 L1 L2 L3 S2 L1 L2 L3 S3 L1 L2 L3
L1127
7108
7108 L1
19108
7108
19108 L1
19108
19108
7108
L27
10819108
19108 L2
7108
127
7108 L2
19108
19108
7108
L37
10819108
19108 L3
19108
7108
19108 L3
7108
7108
127
APPENDIX C. Integration of monomials of volumetric barycentric
coordinates of the second order overbarycentric subdomains �̃1,
�̃2, �̃3, and �̃4.
�̃1 L1 L2 L3 L4 �̃2 L1 L2 L3 L4
L183
115267
345667
345667
3456 L1161
1728067
345697
1728097
17280
L267
3456161
1728097
1728097
17280 L267
345683
115267
345667
3456
L367
345697
17280161
1728097
17280 L397
1728067
3456161
1728097
17280
L467
345697
1728097
17280161
17280 L497
1728067
345697
17280161
17280
�̃3 L1 L2 L3 L4 �̃4 L1 L2 L3 L4
L1161
1728097
1728067
345697
17280 L1161
1728097
1728097
1728067
3456
L297
17280161
1728067
345697
17280 L297
17280161
1728097
1728067
3456
L367
345667
345683
115267
3456 L397
1728097
17280161
1728067
3456
L497
1728097
1728067
3456161
17280 L467
345667
345667
345683
1152
APPENDIX D. Integration of monomials of volumetric barycentric
coordinates of second order over partsof median planes: S12, S13,
S14, S23, S24, and S34.
S12 L1 L2 L3 L4 S13 L1 L2 L3 L4
L123
103685
345641
1036841
10368 L123
1036841
103685
345641
10368
L25
345623
1036841
1036841
10368 L241
10368115
1036841
10368115
10368
L341
1036841
10368115
10368115
10368 L35
345641
1036823
1036841
10368
L441
1036841
10368115
10368115
10368 L441
10368115
1036841
10368115
10368
S14 L1 L2 L3 L4 S23 L1 L2 L3 L4
L123
1036841
1036841
103685
3456 L1115
1036841
1036841
10368115
10368
L241
10368115
10368115
1036841
10368 L241
1036823
103685
345641
10368
L341
10368115
10368115
1036841
10368 L341
103685
345623
1036841
10368
L45
345641
1036841
1036823
10368 L4115
1036841
1036841
10368115
10368
S24 L1 L2 L3 L4 S34 L1 L2 L3 L4
L1115
1036841
10368115
1036841
10368 L1115
10368115
1036841
1036841
10368
L241
1036823
1036841
103685
3456 L2115
10368115
1036841
1036841
10368
L3115
1036841
10368115
1036841
10368 L341
1036841
1036823
103685
3456
L441
103685
345641
1036823
10368 L441
1036841
103685
345623
10368
Numerical Methods for Partial Differential Equations DOI
10.1002/num
-
1082 VOITOVICH AND VANDEWALLE
References
1. R. E. Bank and D. J. Rose, Some error estimates for the box
method, SIAM J Numer Anal 24 (1987),777–787.
2. Z. Cai, On the finite volume element method, Numer Math 58
(1991), 713–732.
3. Z. Cai, J. Mandel, and S. McCormick, The finite volume
element method for diffusion equations ongeneral triangulations,
SIAM J Numer Anal 38 (1991), 392–402.
4. W. Hackbusch, On first and second order box schemes,
Computing 41 (1989), 277–296.
5. B. R. Baliga and S. V. Patankar, A new finite-element
formulation for convection-diffusion problems,Numer Heat Transfer 3
(1980), 393–409.
6. C. Masson, H. I. Saabas, and B. R. Baliga, Co-located
equal-order control-volume finite element methodfor two-dimensional
axisymmetric incompressible fluid flow, Int J Numer Methods Fluids
18 (1994),1–26.
7. C. Prakash and S. V. Patankar, A control volume-based
finite-element method for solving the Navier-Stokes equations using
equal-order velocity-pressure interpolation, Numer Heat Transfer 8
(1985),259–280.
8. S. F. McCormick, Multilevel adaptive methods for partial
differential equations, SIAM, Philadelphia,1989.
9. Z. Cai, J. Jones, S. F. McCormick, and T. F. Russell, Control
volume mixed finite elements, CompGeosci 1 (1997), 289–315.
10. T. F. Russell and R. V. Trujillo, The finite volume element
method for elliptic and parabolic equations,G. A. Watson and D. F.
Griffiths, editors, Numerical analysis: R. A. Mitchell 75th
Birthday Volume,World Scientific, Singapore, 1996, pp. 271–289.
11. R. V. Trujillo, Error analysis of the finite volume element
method for elliptic and parabolic partial dif-ferential equations,
PhD thesis, Department of Applied Mathematics, University of
Colorado at Denver,1966.
12. M. A. Eisenberg and L. E. Malvern, On finite element
integration in natural coordinates, Int J NumerMethods Eng 7
(1973), 574–575.
13. Y. Liu and M. Vinokur, Exact integration of polynomials and
symmetric quadrature formulas overarbitrary polyhedral grids, J
Comput Phys 140 (1998), 122–148.
14. T. V. Voitovich, Technologies of the finite volume finite
element method for the solution of theconvection-diffusion problems
on simplicial grids, PhD thesis, Institute of Theoretical and
AppliedMechanics SB RAS, Novosibirsk, Russia, 2000.
15. T. V. Voitovich, O. P. Solonenko, and E. P. Shurina, On the
construction of high-order-accurate upwindschemes on compact
triangulation stencils, M. Feistauer, R. Rannacher, and K. Kozel,
editors, Numer-ical modelling in continuum mechanics, Proceedings
of the 4th Summer Conference held in Prague,Czech Republic, 31
July–4 August, 2000, Matfyspress, Prague, 2001, pp. 315–326.
16. G. E. Schneider and M. J. Raw, A skewed positive influence
coefficient procedure for control-volume-based finite-element
convection-diffusion computation, Numer Heat Transfer 9 (1986),
1–24.
17. S. Rida, F. McKenty, F. L. Meng, and M. Reggio, A staggered
control volume scheme for unstructuredtriangular grids, Int J Numer
Methods Fluids 25 (1995), 697–717.
18. B. Armaly, F. Durst, J. C. F. Pereira, and B. Schoening,
Experimental and theoretical investigation ofbackward-facing step
flow, J Fluid Mech 127 (1983), 473–496.
Numerical Methods for Partial Differential Equations DOI
10.1002/num