Embed Size (px)
Citation preview

ARTICLE IN PRESS
0165-1684/$ - se
doi:10.1016/j.sig
�Correspondi+44 121 414 429
E-mail addre
Signal Processing 85 (2005) 591–605
www.elsevier.com/locate/sigpro
Event detection and period extraction using multi-scalesymmetry and entropy
Robert Jacksona, David Pycockb,�, Ming Xuc, Mounther Salousb,Mark Knowlesd, Stephen Harmand
aAltera, European Technology Centre, Holmers Farm Way, High Wycombe, HP12 4XF, UKbElectronic Electrical and Computer Engineering, The University of Birmingham, Edgbaston, Birmingham, B15 2TT, UK
cCity University, London, Northampton Square, London, EC1V 0HB, UKdQinetiQ, Sensors and Electronics Division, St. Andrews Road, Malvern, Worcs., WR14 3PS, UK
Received 26 September 2003; received in revised form 23 June 2004
Abstract
We present a system for detecting discrete periodic events over a short interval and in the presence of interference. In
the first stage symmetries are identified using scale-space representation. This process detects signal events with a low
signal-to-noise ratio but has the potential to introduce a number of false responses. This process is followed by an
entropy-based algorithm that can robustly extract periodicities from a set of observed discrete events in the presence of
a large number of false alarms. The event detection and period extraction processes have a low computational cost and
can extract signal periodicity after a short observation time. This scheme was evaluated against four previously reported
methods. Results demonstrate that the period extraction algorithm presented here is more reliable than three of the
previously reported algorithms. The reliability of the algorithm presented here was similar to that of the fourth method
but the computational cost was much less.
r 2004 Elsevier B.V. All rights reserved.
Keywords: Scale-space; Multi-scale; Medial-axis transform; Period isolation; Parameter extraction; Entropy; Symmetry
1. Introduction
In radar, communications and signal identifica-tion it is often necessary to determine theperiodicity of a process by detecting and measur-
e front matter r 2004 Elsevier B.V. All rights reserve
pro.2004.10.019
ng author. Tel.: +44 121 414 4330; fax:
1.
ss: [email protected] (D. Pycock).
ing a sequence of discrete events. In manysituations, radar, radio and communicationsources (such as satellite transmitters, beaconsand ground transmitters) can be identified in thisway. To extract the period quickly it is necessaryto apply computationally efficient algorithmswhich can detect as many events as possible,including those with low signal-to-noise ratios,and rapidly extract their period.
d.

ARTICLE IN PRESS
R. Jackson et al. / Signal Processing 85 (2005) 591–605592
A common approach to extracting signals of aknown characteristic at low signal-to-noise ratiosis to use a matched filter [14]. However, inapplications where the periodic response arisesfrom a large number of possible sources or whereevents possess variable and previously unknowncharacteristics, the detector would require anumber of matched filters and the capability togenerate new filters at run-time. This leads to ahigh system complexity.
We present an approach which detects events byidentifying symmetries in their scale-space repre-sentation. Symmetries are extracted using amedial-axis transform previously used in computervision applications [18]. An algorithm (SPINDLE)which identifies periodicity through a processes ofresampling (or ‘‘folding’’ [15]), binning and en-tropy-based comparison is then applied.
Section 2 introduces the concept of scale-spacerepresentation, Sections 3 and 4 define the periodestimation problem and review previously re-ported algorithms for period extraction. Ourproposed mechanisms for detecting events usingsymmetry and extracting their period are defined
0 50 100 150 200 250 300-2
0
2
4
6
8
10
12
0 50 100 1-2
0
2
4
6
8
10
12
(a) (b
(c)
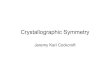
Fig. 1. Multi-scale depiction of a signal (a) original signal (b) coarse-
filter) (c) fine-scale view (equivalent to original).
in Sections 5 and 6. Results are presented inSections 7–9.
2. Scale-space techniques
Objects, be they events recorded from a radarsystem or real world images, are perceived ashaving structure at a range of scales. For example,a sine wave modulated by a square wave willappear to have the structure of the square wavewhen examined at a coarse scale; the sine wavebecoming apparent when the signal is observed ata higher level of detail, as shown in Fig. 1. Scalecan be considered as an additional continuousdimension in our analysis of signals [9]. Note thatscale representation is not the same as timedomain filtering.The scale-space representation of a signal is
constructed by applying a diffusion operation. AGaussian smoothing filter is used as the diffusionoperator, to construct a linear scale-space repre-sentation. This linear scale-space is shift invariantand does not cause local extrema to be enhanced
0 50 100 150 200 250 300-2
0
2
4
6
8
10
12
50 200 250 300
)
scale view (constructed by repeated application of a smoothing

ARTICLE IN PRESS
R. Jackson et al. / Signal Processing 85 (2005) 591–605 593
or created as scale changes from fine to coarse [9].These properties allow features to be trackedacross scale without discontinuity [8]. Uncorre-lated and slightly correlated noise is only repre-sented at fine scale and is rapidly attenuated asscale is increased [1]. Theories of Gaussian scale-space can be extended to discrete formulations [8].Multi-resolution techniques yield some of theproperties of scale-space analysis in that theyabstract and remove detail. However, a scale-spacerepresentation makes scale a metric dimension sothat scale can be interpreted with the spatial andtime axes.
An alternative approach to multi-resolutionprocessing is to use a wavelet representation ofthe data and to select basis functions andcoefficients that optimally differentiate signal fromnoise. However, it has been shown that forrelatively unstructured signals such as thoseencountered here (see Fig. 9(a)) it is not easy toidentify wavelet coefficients which characterise thesignal [7].
3. Periodic signal model
The information from which the periodicity ofthe process must be extracted can be modelled as asignal containing a series of discrete eventsoccurring with period T. The detection time ofthe first event determines the phase, t; of the signal(0ptoT). A sequence of n observed events shouldtherefore occur at times mT þ t;m 2 f1; 2; . . . ; ng:
We assume that only a fraction of events arecorrectly identified. The set of detected events isgiven as fkig: The probability that an event isincluded in the set, Pðm 2 fkigÞ; is given by Pdetect:
The detector or generating process introducessome error or jitter, ZðiÞ; in the time at which eachevent is detected. We assume that ZðiÞ is anindependent random variable with zero mean,uniformly distributed over some fraction of theinterval � T
2;þ T
2
� �: The set of detected events is
given by fkiT þ tþ ZðiÞg:The detection process introduces nFA false
alarms. Each false alarm in the setfFA1;FA2; . . . ;FAnFAg is assumed to be indepen-dent and uniformly distributed over the interval
½0; nT þ t: The set of events from which the periodmust be extracted is therefore given by
y ¼ fkiT þ tþ ZðiÞg [ fFA1; . . .g (1)
and yðiÞ is the time of detection of the ith event.
4. Period extraction: background
Previously reported methods for extracting theperiod from a set of measurements have beenbased on histograms of time differences[2,3,10,11,17], Kalman Filtering [5], forward dy-namic programming [12] and spectral analysis [6].A histogram of the difference between the time
of event detection is simply computed as fyðiÞ �
yðjÞg; i; j ¼ 1; 2; 3; . . . : The period can be deter-mined by recognising a peak (at T) and itsharmonics [10,11,17]. Alternatively, the time dif-ference between successive events, fyði þ 1Þ � yðiÞg;can be examined [2,3]. Both approaches requirethe signal to be observed for a large number ofperiods before an accurate value for T can beestimated and are sensitive to false alarms.To apply Kalman filtering [5], a simple state
machine is constructed to model the generatingprocess
Tkþ1
tkþ1
" #¼
1 0
1 1
� �Tk
tk
" #þ
Z1Z2
" #(2)
with initial state
T0
t0
" #¼
T
t
� �; (3)
where Z1; Z2 correspond to a zero mean Gaussianwhite noise sequence, termed process noise, whichaccommodates jitter, and T0; t0 are the initialvalues of T and t:The Kalman filter approach has three main
drawbacks:
�
If the initial conditions ðt0;T0Þ are not appro-priate then the filter may require a long periodof observation (considerably more than the 10cycles envisaged here) to correctly identify T.�
The state-space model does not include anymechanism for representing missed events.
ARTICLE IN PRESS
R. Jackson et al. / Signal Processing 85 (2005) 591–605594
�
As with missed events, false alarms cause thefilter to modify its state variables ðtk;TkÞ toaccept the observations and, as a results, tomove away from the correct state.Robust methods designed to overcome theselimitations significantly increase computationalcost. Elton and Slocumb [5] describe a pulsegating modification, commonly used in pulse trainde-interleaving and filtering, that can accommo-date false and missed alarms. A gating window isconstructed, centred on the predicted detectiontime of the next event and with width proportionalto the Kalman filter’s belief in the accuracy of itsstate estimate. Whilst this modification can copewith missed and false alarms it increases sensitivityto initial state values ðt0;T0Þ: Should the filterbecome fixated on an incorrect value of T or aharmonic such as 2T ; or T
2; gating may exclude
detected events that would otherwise allow acorrection of the estimate.
Moore and Krishnamurthy [12] proposed ascheme of forward dynamic processing (FDP) tode-interleave and track interleaved pulse trainsfrom multiple periodic sources. In effect, allpossible interpretations of event origin are con-sidered by looking ahead (over a finite time span)and the Kalman filter error term is used todetermine the most appropriate interpretation.This search step introduces a computational costof order OðNDþ3Þ; where N is the number ofsources and D is the number of events the look-ahead operates over. Robustness to false alarmswas incorporated by allowing the look-aheadalgorithm to designate some events as false alarms.Both modifications increase the computationalcost considerably. Extending this technique tocope with frequent false alarms is possible butfurther increases the computational cost.
Fogel and Gavish [6] proposed an algorithm forestimating periodicity by inspecting the spectralcomponents of the signal. Given that yðiÞ is the timeof detection of the ith event, T can be identifiedfrom a range of test values, T ; by selecting the valuewhich has the largest Fourier co-efficient:
T ¼ arg maxT
Xi
ej2pyðiÞ=T
����������: (4)
When no false alarms are present Eq. (4) is amaximum likelihood estimator of T [6]. Thisalgorithm is computationally intensive requiring acomplex exponentiation and summation for a largerange of possible values of T.Eq. (4) favours lower estimates of T. The
summation gives the same value when T ¼ T2as
it does when T ¼ T : In effect the algorithm doesnot distinguish between an interpretation of thesignal as having period T
2 with 50% of its eventsmissing and an interpretation having period T withno missed events. Signals with lower periodsshould yield larger coefficients as more events willhave been observed. If the signal is observed for aperiod l and has period T the summation shouldreturn a value of l
T: We therefore propose a
modified form the algorithm, which scales each co-efficient by dividing by its expected value. Hencethe modified form:
T ¼ arg maxT
T
l
Xi
e j2pyðiÞ=T
����������: (5)
Elton and Gray [4] described a mechanism for thedetection of pulse trains of a known period byconstructing a modulo-T resampled (or ‘‘folded’’)distribution, as defined in Eq. (6). The twoextremes of the new distribution are equivalentand it is therefore regarded as a continuous loop.The Z2
m circular statistic of Eq. (7) is tested todetect the presence of a periodic process.
fðyðiÞÞ ¼ 2pyðiÞ
T�
yðiÞ
T
� �; (6)
Z2m ¼
2
N
Xm
l¼1
XN
i¼1
cosðlfðyðiÞÞÞ
" #28<:
þXN
i¼1
sinðlfðyðiÞÞÞ
" #29=;; ð7Þ
where N is the number of events observed and m,the number of harmonics present in the signal.The periodicity of a signal can be determined
by selecting the value of T that maximises Z2m
(Eq. (8)).
T ¼ arg maxT
Z2mðTÞ (8)

ARTICLE IN PRESS
R. Jackson et al. / Signal Processing 85 (2005) 591–605 595
Computing the Z2m statistic has a computational
cost of order OðmNÞ: However, each stepinvolves evaluating a number of trigonometricfunctions and is therefore relatively expensive tocompute.
5. Event detection using multi-scale symmetries
To detect events which have a weak or varyingstructure we have applied a non-linear multi-scalemedial-axis (MMA) algorithm [13] which identifiesaxes of symmetry occurring at different scales. Theadvantages of this algorithm, the concordance-based medial-axis transform (CMAT) [18], overother linear MMA algorithms are improvedfeature localisation and width identification whilstretaining robustness to noise.
MMA algorithms are typically used to find axesin images or data with greater than one dimension,however, they can be efficiently used to detectsymmetries in 1D signals.
Fig. 2 illustrates medial-axis computation.Initial processing, convolution with the derivativeof a Gaussian, identifies evidence for potentialboundary points (boundariness) at a given scale(s). Boundariness information is combined, insuch a way that symmetries resulting from the twosides of an object reinforce each other, to indicatemedialness. A skeletal representation of thestructure can be constructed by extracting themedialness ridges.
Boundariness
Medialness
Signal
Medialness operator
r
r = k
Fig. 2. Constructing the MMA of a signal.
5.1. Multi-dimensional definition of CMAT
The first step in computing a CMAT medial axisinvolves calculating the boundariness of the signalat each scale. The boundary response at point a
and scale s; Bðs; aÞ; has two components: bðs; aÞthe strength of the boundary at a and nðs; aÞ thedirection to the centre of the structure of whichBðs; aÞ forms the boundary. B can be computed byconvolving the signal data with a filter based onthe first derivative of the Gaussian kernel. Theradius of the structure is taken as r ¼ ks where k isa constant relating the scale of smoothing to theradius of the operator, r. As the Gaussian responseis reduced by 95% and 99% after 2 and 3 standarddeviations, respectively, non-critical parameter k
normally takes an arbitrary value around 2 or 3.This ensures that the area considered by theboundary detection process is similar to the widthof the symmetry detector. Therefore, the boundari-ness at point a contributes to the initial medialnessresponse at point x ¼ aþ rnðs; aÞ by bðs; aÞ:By summing all the contributions we can
construct an initial description of the medialness,the Laplacian of the Gaussian medialness [18], fora given scale
mðs;xÞ ¼Xa
bðs; aÞdðx� a� rnðs; aÞÞ; (9)
where dðnÞ is the discrete Delta function defined as:dðnÞ ¼ 1 if n ¼ 0; otherwise dðnÞ ¼ 0.This initial medialness surface contains boun-
dariness contributions from single edge points.The CMAT algorithm computes a weight (theconcordance) for each boundariness point whichemphasises symmetric boundaries. The concor-dance criterion is defined as
cðs; aÞ ¼mðs; xÞ � bðs; aÞ
mðs;xÞ: (10)
The form of the concordance function cðs; aÞ andalternative expressions are discussed in a previouspaper [18]. The final CMAT response is given as
Mðs;xÞ ¼Xa
bðs; aÞcðs; aÞdðx� a� rnðs; aÞÞ:
(11)

ARTICLE IN PRESS
t
Background Background
Medialness
Test
Excluded
σ
Fig. 3. Two-dimensional windowed significance operator.
R. Jackson et al. / Signal Processing 85 (2005) 591–605596
5.2. Definition of the 1D CMAT
In the case of a 1D signal we can simplify thecomputation of the CMAT. Boundary strength,bðs; tÞ; is computed as before. However, it is muchsimpler to determine the centre of the structure:the centre is either r samples before or after t.
A positive value of b indicates the beginning of astructure and a negative value indicates the end.Positive values of bðs; tÞ; therefore, contribute tothe medialness of point t þ r whereas negativevalues contribute to the medialness of point t � r:Two boundariness subsets can be formed:
bnegðs; tÞ ¼ j bðs; t þ rÞ j bo0;
bposðs; tÞ ¼ bðs; t � rÞ b40 ð12Þ
the initial medialness can be computed as before:
mðs; tÞ ¼ bnegðs; tÞ þ bposðs; tÞ; (13)
the concordance for each point of bneg and bpos is
cnegðs; tÞ ¼mðs; tÞ � bnegðs; tÞ
mðs; tÞ;
cposðs; tÞ ¼mðs; tÞ � bposðs; tÞ
mðs; tÞ: ð14Þ
Substituting Eq. (13) for mðs; tÞ in Eq. (14)
cneqðs; tÞ ¼bposðs; tÞ
bnegðs; tÞ þ bposðs; tÞ;
cposðs; tÞ ¼bnegðs; tÞ
bnegðs; tÞ þ bposðs; tÞð15Þ
and the final medialness is computed as
Mðs; tÞ ¼ cnegðs; tÞbnegðs; tÞ þ cposðs; tÞbposðs; tÞ
¼2bnegðs; tÞbposðs; tÞ
bnegðs; tÞ þ bposðs; tÞ: ð16Þ
5.3. Multi-scale feature detection
To distinguish simple structures from noise wetest the medialness signal for evidence of symme-tries that persist across a number of scales. Weassume that noise is unstructured and thereforewill not possess symmetries that persist. Noise israpidly attenuated across scale and so signalsymmetries are more apparent at coarser scales
[16]. At fine scales the impact of noise is greaterbut the presence of less extensive structures can beidentified.The set of scales at which the medialness is
examined is given by the generalised arithmeticprogression
rn ¼ ban þ g; (17)
where g represents the minimum scale at which thesignal is present and a and b are arbitraryconstants [9]. The sampling of scale-space isdesigned to follow the geometric pattern createdby the successive reductions of scale using a seriesof convolutions. The rate of progression of thissampling is chosen so that the first step is a unit ofchange in scale and the range of covered scales isbetween one and two orders of magnitude in arelatively small number of samples.A windowed 2D significance operation is used
to integrate medialness information that is thre-sholded to detect events. The significance operator(Eq. (18)) compares the mean medialness over theregion of medialness space under test (mT) withthat in the background (mB) and returns thedifference in terms of multiples of the standarddeviation of the background (SDB):
sigðtÞ ¼ 1þmT � mBSDB
: ð18Þ
The significance operator is depicted in Fig. 3.Small regions either side of the area under test areexcluded when computing background values toprevent increased values of medialness near themain point of symmetry effecting mB and SDB
(Fig. 4). A threshold is applied to sigðtÞ in order todetect events. The value of this threshold and theSNR of the data are reflected in the probability offalse alarms (PFA) and the probability that anevent is detected (Pdetect). The selection ofan appropriate threshold depends on the

ARTICLE IN PRESS
Fig. 4. Pseudo-code description of CMAT algorithm.
R. Jackson et al. / Signal Processing 85 (2005) 591–605 597
characteristics of subsequent processing steps (i.e.sensitivity to false alarms, expected SNR). Thechoice of this threshold is not critical because therole of the event detection process is to generatecues; a list of possible events and not to detect onlytrue events. Here, SNR is defined as the ratio ofthe mean signal power over the mean noise power.
6. Entropy-based period extraction
We propose a computationally efficient algo-rithm which uses entropy to select a moduloresampling of the set of detected events corre-sponding to T. The algorithm includes a binningoperation that reduces computational costs andprovides robustness to signal jitter.
Assuming
yðkÞ ¼1 if a structure is detected at time k;
0 otherwise
�(19)
we can form the modulo-T resampled distributionyT ðmÞ as
yT ðmÞ ¼XN
k¼1; ðk mod T¼mÞ
yðkÞ; (20)
where yT ðmÞ is defined for m ¼ 1; 2; . . . ; T :The modulo resampled distribution is then
divided into B symbols (bins, b ¼ 1; 2; . . . ;B) each
with probability of occurrence
pT ðbÞ ¼
Pðbþ1Þ=BT
m¼b=BTyT ðmÞP
m yT ðmÞ(21)
the entropy of this empirical estimate of thedistribution is given as
HðTÞ ¼ �X
b
pT ðbÞ log pT ðbÞ (22)
and the value of T that minimises HðTÞ isextracted
T ¼ arg minT
j HðTÞ j : (23)
This period extraction process relies on the factthat, when resampled modulo-T, the distributionof detected events will form a pattern and hence itscomputed entropy will be reduced relative to otherresamplings. Specifically, that, when resampledmodulo-T, the set of events will demonstrate acluster centred about t: Other more complexperiodic processes such as staggered pulse trainswill also form patterns when resampled, however,their treatment is not considered here.Uniformly distributed false alarms will remain
uniformly distributed under different resamplingsand so their presence will not affect the values ofentropy used to compare different resamplings.Moreover, for a given sequence of events, the biasintroduced by these false alarms in estimatingentropy (Eq. (22)) does not change with differentresamplings and therefore does not influence theoutcome of the period extraction process. Thechoice of re-sampling interval is discussed furtherin Section 6.1.Resampling modulo fractional values of T (i.e.
mn
T ; m; n 2 Z) also gives rise to structured dis-tributions. The chance occurrence of false alarmsand missed events may lead to the formation of adistribution with a lower computed entropy thanthe modulo-T distribution and cause the algorithmto extract a fraction of the true period.The binning operation partitions the resampled
distribution into a fixed number of bins (symbols).This operation:
�
amalgamates adjacent events, making the de-tector robust to jitter;
ARTICLE IN PRESS
R. Jackson et al. / Signal Processing 85 (2005) 591–605598
�
reduces computational costs by fixing thenumber of operations needed to calculateentropy and the range of T values that need tobe tested;�
Fig. 5. Original periodic signal.
Fig. 6. Signal resampled modulo-T.
allows entropies for different values of T to becompared directly. Some other formulations forcomputing entropy depend on the length of theinterval ½0; TÞ and would require normalisationbefore comparisons could be made.
The period extraction operation relies on detectingevent clusters when resampled modulo-T. If thecluster occurs near a bin boundary the events maybe split between two bins reducing the likelihoodthat T will be correctly selected as the period. Thiscan be avoided by either testing each candidate T
value twice, shifting the bin positions by half theirwidth between computations, or by choosingsuccessive values of T sufficiently close that thecluster of events is contained within a single bin,for at least one resampling. The choice of thissampling interval is discussed below.
Fig. 7. Signal resampled modulo-ðT þ dÞ:
6.1. Sampling regime and resolutionA range of values of T must be tested to identifythe period. The computational cost, accuracy andcorrectness of the algorithm depend on the lengthof time for which the generating process isobserved, the number of bins used and the sizeof step with which T is sampled. It is possible todetermine a maximum step size, above which thealgorithm is unlikely to correctly determine theperiod, T.
Consider a sequence of n periodic eventsoccurring exactly every T samples with the firstevent occurring after t samples (0ptoT) (Fig. 5).The signal is observed for a length of time, l �
nT þ t:When resampled modulo-T ¼ T all the events
occur at the same point, t (Fig. 6). Whenresampled modulo-T ¼ T þ dT the events areevenly distributed across the interval t� ndT ; t½
(Fig. 7). Each bin covers TBsamples, where B is the
number of bins.To extract the period, T, the modulo resampling
should cause all events to fall within the same bin.To determine the interval covered by a bin, assume
that the distribution is initially resampled usingT ¼ T : If the next resampling, using candidateperiod T ¼ T þ dT ; causes the events to bedistributed across a single bin, it will be impossibleto extract the correct signal period. We therefore,choose a step size dT that will cause the events tobe distributed over an interval (ndT ) which issmaller than a bin (TþdT
B):
ndTpT þ dT
B; (24)
dTpT
nB � 1(25)
assuming nBb1 and l � nT we derive
dTpT
2
lB: (26)
Using Eq. (26) guarantees that all the detectedsignals are distributed over an interval less thanthe width of a single bin for at least two moduloresampled distributions.

ARTICLE IN PRESS
Fig. 8. Pseudo-code description of SPINDLE algorithm.
0.14
0.16
0.18
R. Jackson et al. / Signal Processing 85 (2005) 591–605 599
Eq. (26) also defines the resolution of theextraction algorithm. Resolution is inversely pro-portional to step size; increasing the number ofbins or the length of time the signal is observedincreases the accuracy with which T can becomputed, whilst the period of low-frequency(large T) signals can only be coarsely calculated.
6.2. Computational complexity
The computational complexity of SPINDLE
can be derived directly from Eqs. (20)–(23). Thepseudo-code description given in Fig. 8 assumesthat the algorithm used B bins, that n events havebeen detected and yðiÞ is the time of the ith event.A range of possible values for the period betweenT1 and T2 are examined using a fixed step of dT
between each tested value. The total computa-tional cost is O n
dT; BdT
� �:
0 100 200 300 400 500 600 700 800 900 10000
0.02
0.04
0.06
0.08
0.1
0.12
Time
Am
plitu
de
0.6
0.65
0.7
0.75
0.8
0.85
0.9
0.95
1
Pde
tect
(a)
7. Event detection performance
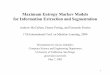
Fig. 9(b) shows the performance of the CMAT-based detector when identifying structures of thetype shown in Fig. 9(a), at low signal-to-noiseratios. At a 5 dB signal-to-noise ratio the algo-rithm yielded a probability of event detection,Pdetect of 0.95 with a probability of a false alarmthat was below 0.001.
The detector was tested for symmetries over arange of event durations set by using k ¼ 3; andfixing a ¼ 1:8; b ¼ 0:7 and g ¼ 7; resulting in r ¼
8; 9; 11; 14; 20; 30: A similar pattern is given of a ¼
2; b ¼ 0:5 and g ¼ 7; for example. The choicebetween such variations is not shown here but hasshown not to be critical. The significance operatorused a test window of width 1, with excluded andbackground regions of width 30 and 150 samples,respectively (see Fig. 3).
0 0.001 0.002 0.003 0.004 0.005 0.006 0.007 0.008 0.009 0.010.5
0.55
Pfalse alarm(b)
Fig. 9. Performance of CMAT-based detector (a) original
signal (b) Receiver operating characteristic curves for signal-to-
noise ratio of 0 dB (dotted line), 5 dB (dashed), 10 dB
(dash–dot) and 20 dB (solid line).
8. Period extraction algorithm performance
We have compared the performance of SPIN-
DLE, for a range of false alarm and jitterconditions, with that of the modified versionof Fogel and Gavish’s algorithm (F&G) given in

ARTICLE IN PRESS
R. Jackson et al. / Signal Processing 85 (2005) 591–605600
Eq. (5), the Z2m statistic given in Eq. (8), a
histogramming algorithm (CDIF [10,11]), andthe technique described by Moore and Krishna-murthy [12], using a Kalman Filter with a 6-eventFDP interval (D ¼ 6Þ). The evaluation was per-formed using simulations, with synthetic dataconsisting of lists of false alarms and eventdetection times. This was done to obtain con-trolled levels of perturbation for jitter, phase shiftand false events and to allow a systematic andquantitative evaluation. In each case 250 MonteCarlo simulations were performed for each set ofconditions.
8.1. Sensitivity to false alarms
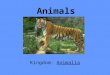
Fig. 10 shows the performance of the fivealgorithms in the presence of false alarms. Thegraphs show the results of simulations using asignal with number of events, n ¼ 10; period T
randomly selected from the interval ½750; 4750;jitter, j ¼ 0:01 (i.e. 1% of T); and phase, trandomly initialised. Both algorithms tested arange of possible values of T from 500 to 5000with a step size, dT ; of 10, (i.e.T ¼ ½500; 510; 520; . . . ; 4990; 5000). The SPIN-
DLE algorithm used 30 bins ðB ¼ 30Þ: The numberof false alarms, nFA; was varied from 0 to 100 andthe probability of detection of events, Pdetect; wasset at 0.6, 0.8 and 1.0.
Fig. 10 demonstrates that the SPINDLE algo-rithm is only outperformed by the computation-ally intensive Z2
m statistic for moderate (20 ormore) levels of false alarms. In the presence of 10false alarms, with 8 of the 10 periodic eventsdetected, the correct value for T was extracted witha probability of around 0.8. Under these condi-tions the probability that the F&G algorithm givesthe correct result dropped to 0.15.
The performance of the Z2m statistic exceeds that
of SPINDLE when a large number of harmonicsare tested (m ¼ 20); this approach is computation-ally more expensive. For each value of T tested,computing Z2
m; requires the evaluation of 2mN
trigonometric functions, where N is the number ofevents detected. The SPINDLE algorithm requiresonly B evaluations of a log function. In Fig. 10 thiscorresponds to approximately 400 trigonometric
computations for the Z2m statistic compared to 30
logarithmic computations for SPINDLE perperiod estimation.
8.2. Sensitivity to jitter
Fig. 11 shows the performance of Z2m; SPIN-
DLE, CDIF and the modified F&G algorithm asjitter was increased from 0% to 50% of T ðj ¼ 0 to0.5). The performance of the Kalman filter was nottested here as it performed very poorly in theprevious test. The parameters used for this testwere: number of false alarms, nFA ¼ 2; number ofevents, n ¼ 10; and T in the range ½750; 4750:It is clear from Fig. 11 that the CDIF algorithm
performed worst as jitter increased. Overall, theZ2
m algorithm modestly outperformed the SPIN-
DLE algorithm for most tested event detectionprobabilities. However, for small jitter, less than5%, SPINDLE outperforms the Z2
m algorithm.The performance of the SPINDLE algorithmdegraded almost linearly as jitter increased from5% to 50% of T. Very low values of jitter caused aslight degradation in performance as it becamehard to distinguish between T and its fractionalharmonics T
2 ;T3 ; . . . : A jitter of 2% of T appeared
as a jitter of 4% of T2; 6% of T
3; ::: causing the
fractional values to be correctly rejected.Fig. 11 also shows that the performance of the
modified version of F&G’s algorithm (refer to Eq.(5)) also decreased linearly with jitter (Fig. 11(c))albeit at a lower rate. Although Fig. 11 demon-strates that for some higher levels of jitter the F&Galgorithm outperforms SPINDLE it should benoted that these results deal with a situation wherethe number of false alarms is very low.
8.3. Sensitivity to phase
The binning process in SPINDLE introduces asensitivity to the phase, t; of the signal. Certainvalues of t will cause the detected structures to beclustered around the boundary between twosymbol bins when the events are resampledmodulo-T ¼ T : In addition, jitter will cause theobserved detection times of the events to be splitbetween two bins. As a result T may then not becorrectly identified as T. Under the conditions we

ARTICLE IN PRESS
0 10 20 30 40 50 60 70 80 90 1000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
number of false alarms
prob
abili
ty th
at v
alue
is w
ithin
1%
of T
0 10 20 30 40 50 60 70 80 90 1000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
number of false alarms
prob
abili
ty th
at v
alue
is w
ithin
1%
of T
0 10 20 30 40 50 60 70 80 90 1000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
number of false alarms
prob
abili
ty th
at v
alue
is w
ithin
1%
of T
0 10 20 30 40 50 60 70 80 90 1000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
number of false alarms
prob
abili
ty th
at v
alue
is w
ithin
1%
of T
0 10 20 30 40 50 60 70 80 90 1000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
number of false alarms
prob
abili
ty th
at v
alue
is w
ithin
1%
of T
(a) (b)
(c) (d)
(e)
Fig. 10. Probability that the extracted period is equal to T�1% for (a) Z2m; (b) SPINDLE, (c) histogram difference (CDIF), (d)
modified Fogel and Gavish and (e) Kalman Filtering (FDP). Probability of event detection, Pdetect of 1.0 (solid lines), 0.8 (dashed line),
0.6 (dash–dot).
R. Jackson et al. / Signal Processing 85 (2005) 591–605 601

ARTICLE IN PRESS
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.50
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
jitter (as a fraction of T)
prob
abili
ty th
at v
alue
is w
ithin
1%
of T
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.50
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
jitter (as a fraction of T)
prob
abili
ty th
at v
alue
is w
ithin
1%
of T
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.50
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
jitter (as a fraction of T)
prob
abili
ty th
at v
alue
is w
ithin
1%
of T
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.50
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
jitter (as a fraction of T)
prob
abili
ty th
at v
alue
is w
ithin
1%
of T
(a) (b)
(c) (d)
Fig. 11. Probability that T�1% is returned as jitter is increased from 0% to 50% of T: (a) Z2m; (b) SPINDLE, (c) histogram difference
(CDIF) and (d) modified Fogel and Gavish. Probability of event detection, Pdetect of 1.0 (solid lines), 0.8 (dashed line), 0.6 (dash–dot).
R. Jackson et al. / Signal Processing 85 (2005) 591–605602
have considered the chance of a cluster falling on abin boundary is low: with T ¼ 3000 and B ¼ 30the probability of a cluster being on a binboundary is of the order of 0:01: However, shouldthe number of bins be increased the risk of failingto extract T will increase. Therefore, care must betaken to ensure the range of possible values issampled within the bound stated in Eq. (26).
Fig. 12 shows the performance of SPINDLE ast was varied from 0% of T to 100% of T. TheSPINDLE algorithm was evaluated using 10 bins(B ¼ 10); number of events, n ¼ 10; number offalse alarms, nFA ¼ 10; period T randomly selectedfrom the interval ½750; 4750; jitter, j ¼ 0:01 (i.e.1% of T).
Fig. 12(a) shows the probability that thevalue of T computed was correct to within 10samples. This is the best accuracy possible asdistributions were computed at every tenthvalue for T (i.e. 500, 510, 520, etc). If the phasecauses the detected structures to cluster onone of bin boundaries when T ¼ T the correctvalue of T is not returned. However, resamplingusing T ¼ T � 10 will generate a distribution,similar to T ¼ T ; but is less likely to fall on aboundary. Therefore, even if the T value closest toT is not selected a similar value will be extracted;hence the insensitivity to phase shown inFig. 12(b), where the probability of extracting T �
30 is plotted.

ARTICLE IN PRESS
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.90
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
phase (as a fraction of T)
prob
abili
ty o
f get
ting
T−+
10
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.90
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
phase (as a fraction of T)
prob
abili
ty o
f get
ting
T−+
30
(a)
(b)
Fig. 12. Performance of SPINDLE as phase is varied: (a)
probability that T� 10 is returned, (b) probability that T� 30 is
returned. Probability of event detection, Pdetect of 1.0 (solid
lines), 0.8 (dashed line), 0.6 (dash–dot).
5 10 15 20 25 30 35 40 45 50 550
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
number of bins
prob
abili
ty th
at v
alue
is w
ithin
1%
of T
Fig. 13. Performance of SPINDLE as the number of bins is
increased from 5 to 55. Probability of event detection, Pdetect of
1.0 (solid lines), 0.8 (dashed line), 0.6 (dash–dot).
R. Jackson et al. / Signal Processing 85 (2005) 591–605 603
8.4. Sensitivity to number of bins
Fig. 13 shows the effect of varying the numberof bins used in SPINDLE. Synthetic data with:number of events, n ¼ 10; number of false alarms,nFA ¼ 20; period T randomly selected from theinterval ½750; 4750; jitter, j ¼ 0:01 (i.e. 1% of T);and phase, t randomly initialised, was used.
Accuracy of period detection increases as thenumber of bins is increased. This increase inperformance is accompanied by an increase incomputational cost and sensitivity to initial offsetand jitter. Increasing the number of bins showed
diminishing returns, with near peak performancebeing reached using 20–30 bins.
9. Overall period extraction performance
The performance of the CMAT-based detector,Fig. 9, can be combined with the simulatedperformance of the SPINDLE algorithm to givean indication of overall performance as shown inFig. 14. The number of false alarms generatedwhile observing the signal can be computed as
nFA ¼ ðnT þ tÞPFA: (27)
Fig. 14 shows the probability that the period willbe correctly determined for a signal composed ofdiscrete structures of the kind shown in Fig. 9,which has been observed for ten cycles ðn ¼ 10Þ:We assume a period, T of 2000 samples and jitter,j ¼ 0:01 (i.e. 1% of T). For a signal with a 5 dBSNR, the correct period is extracted in 90% ofcases when the threshold of the CMAT-baseddetector is set between 8 and 12.
10. Conclusions
The CMAT algorithm permits events whichexhibit symmetrical structures to be detected

ARTICLE IN PRESS
0 5 10 15 20 25 30 35 40 45 500
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Threshold
prob
abili
ty th
at v
alue
is w
ithin
1%
of T
Fig. 14. Performance of CMAT-based detector and SPINDLE.
Probability that the extracted period is equal to T�1% as the
detector threshold is raised. Signal-to-noise ratios of 0 dB
(dotted line), 5 dB (dashed), 10 dB (dash–dot) and 20 dB (solid
line).
R. Jackson et al. / Signal Processing 85 (2005) 591–605604
against a background of white noise without priorknowledge of their shape beyond crude assump-tions about their duration and symmetry. It is alsoa computationally efficient and a reliable methodof detecting events that copes with variation inevent characteristics.
The entropy-based algorithm described herepermits the rapid extraction of a period from aset of detected events. The algorithm has a lowcomputational cost of order, O n
dT; BdT
� �; and is
more reliable in the presence of large numbers offalse alarms or missed events than most previouslyreported algorithms and as good as all thosetested, to a first approximation. This has beendemonstrated using synthetic data with a simula-tion of artifacts. The addition of jitter and falsealarms provides a systematic evaluation for sourcedata that is progressively more a-periodic. Inaddition, we have used the performance of theCMAT operator on natural data to estimate theimpact of detector errors on period extraction.
The work described in this paper does notaddress the detection of events defined by signalswith a complex structure. We would, however,expect the performance of the CMAT-baseddetector to degrade gracefully since the definitionof symmetry used in formulating the detector
allows appropriate responses to be made forcomposite events with a modest degree of sym-metry. We are currently investigating extensions tothe detector which will test for the presence ofcomplex combinations of symmetric structuresand could, therefore, effectively and efficientlyidentify composite signals.
Disclaimer
The views expressed are those of the authorsand do not necessarily represent those of the MODor Her Majesty’s Government.
Acknowledgements
(C) British Crown copyright 2003. Publishedwith the permission of the Controller of HerMajesty’s Stationery Office. This work was origin-ally carried out as part of Technology Group 3,now energy guidance and control domain, of theMOD Corporate Research Programme.
References
[1] J. Blom, B.M. ter Haar Romney, A. Bel, J.J. Koenderink,
Spatial derivatives and the propagation of noise in
Gaussian scale-space, J. Vis. Commun. Image Represent.
4 (1) (March 1993) 1–13.
[2] S.D. Casey, B.M. Sadler, Modifications of the Euclidean
algorithm for isolating periodicities from a sparse set of
noisy measurements, IEEE Trans. Sig. Process. 44 (9)
(September 1996) 2260–2272.
[3] V.L. Clarkson, S.D. Howard, I.M.Y. Mareels, Estimating
the period of a pulse train from a set of sparse noisy
measurements, Proceedings of the International Sympo-
sium on Signal Processing and its Applications (ISSPA),
August 1996, pp. 885–888.
[4] S.D. Elton, D.A. Gray, The application of circular
statistics to specific radar pulse train detection, Proceed-
ings of the seventh European Signal Processing Con-
ference—EUSIPCO 94, vol. 1, September 1994, 284–287.
[5] S.D. Elton, B.J. Slocumb, A state space approach to joint
AOA and period estimation for a class of periodic
discrete event processes, Proceedings of IEEE TENCON
- Digital Signal Processing Applications, November 1996,
pp. 686–691.
[6] E. Fogel, M. Gavish, Parameter estimation of quasi-
periodic sequences, Proceedings of the International

ARTICLE IN PRESS
R. Jackson et al. / Signal Processing 85 (2005) 591–605 605
Conference on Acoustics, Speech and Signal Process.
(ICASSP), vol. 4, April 1988, pp. 2348–2351.
[7] H. Krim, D. Tucker, S. Mallat, D. Donoho, On denoising
and best signal representation, IEEE Trans. Inform.
Theory 45 (7) (November 1999) 2225–2238.
[8] T. Lindeberg, Scale-space for discrete signals, IEEE Trans.
Pattern Anal. Mach. Intell. 12 (3) (March 1990) 234–254.
[9] T. Lindeberg, Scale-space Theory in Computer Vision,
Kluwer Academic Publishers, Dordrecht, 1994, reprinted
1997.
[10] H.K. Mardia, New techniques for the deinterleaving of
repetitive sequences, IEE Proc. F 136 (4) (August 1989)
149–154.
[11] D.J. Milojevic, B.M. Popovic, Improved algorithm for
deinterleaving of radar pulses, IEE Proc. F 139 (1)
(February 1992) 98–104.
[12] J.B. Moore, V. Krishnamurthy, Deinterleaving pulse trains
using discrete-time stochastic dynamic-linear models,
IEEE Trans. Signal Process. 42 (11) (November 1994)
3092–3103.
[13] S.M. Pizer, C.A. Burbeck, J.M. Coggins, D.S. Fritsch, B.S.
Morse, Object shape before boundary shape: scale-space
medial axes, J. Math. Imaging Vis. 4 (1994) 303–313.
[14] M. Schwartz, Information, Transmission and Noise,
McGraw-Hill, New York, 1970.
[15] D.H. Staelin, Fast folding algorithm for detection of
periodic pulse trains, Proc. IEEE 75 (April 1969) 724–725.
[16] V.A. Topkar, A.K. Sood, Statistical analysis of scale-
space, Signal Process. 26 (3) (March 1992) 307–334.
[17] R.G. Wiley, Electronic Intelligence: The Analysis of Radar
Signals, Artech House, Norwood, 1982.
[18] M. Xu, D. Pycock, A scale-space medialness transform
based on boundary concordance voting, J. Math. Imaging
Vis. 11 (3) (December 1999) 277–299.