Embed Size (px)
Citation preview

Evaluation of the USDOT’sIntelligent Vehicle Initiative
(IVI)Generation 0 Field Operational TestsPresented by
John E. Orban (Battelle)
Luigi “Gino” Mastrippolito (U.S. Army ATC)NDIA 3rd Annual Intelligent Vehicle Systems Symposium and Exhibition
Traverse City, Michigan
June 11, 2004

Evaluation of IVI Generation 0 FOTs
Discussion Topics
John Orban Background – Intelligent Vehicle Initiative Safety Benefits Methodology Some Preliminary Findings
Gino Mastrippolito Nationwide FOT Data Acquisition Challenges Nationwide FOT Data Acquisition Solution

Evaluation of IVI Generation 0 FOTs
The Intelligent Vehicle Initiative Five Field Operational Tests (FOTs) of Intelligent Vehicle Safety
Systems (IVSS) Commercial Vehicles (Freightliner, Volvo, Mack) Snowplows/Specialty Vehicles (Minnesota) Transit Buses (Pennsylvania/California)
DOT Agencies ITS Joint Program Office National Highway Traffic Safety Administration Federal Motor Carrier Safety Administration
Battelle is the Independent Evaluator
ATC developed on-board data acquisition system for Volvo FOT

Evaluation of IVI Generation 0 FOTs
Five Separate Field Operational TestsVolvo: Collision Warning, Adaptive
Cruise Control, Elec. Controlled BrakesFreightliner: Rollover Advisor
Mack: Safety Advisor, Lane Departure Warning
Plus, other platforms
•Snow plows and emergency vehicles
•Transit

Evaluation of IVI Generation 0 FOTs
Mack Trucker Advisor/LDW Systems SafeTRAC Lane
Departure Warning
Trucker Safety Advisory
#0#0
#0 #0 #0#0#0 #0
#S#S
#S
#S#S
#S
#S
#S #S
#S#S#S #S#S #S#S
#S#S#S#S #S#S #S
#S#S#S#S #S#S
#S#S#S #S#S #S #S
#S #S#S #S
#S#S #S#S #S#S #S
#S#S#S #S#S #S #S#S#S #S#S #S#S
#S#S
#S #S#S #S#S#S#S#S
#S#S#S #S
#S#S#S#S #S#S#S #S
#S#S
#S
#S#S #S
#S
#S #S#S#S#S#S
#S #S#S
#S#S#S
#S#S
#S#S
#S#S
#S
#S#S
#S#S
#S#S
#S#S
#S#S
#S#S#S
#S#S
#S
#S
#S#S
#S#S
#S#S
#S#S
#S#S
#S#S#S#S#S#S#S#S#S#S#S#S#S
#S#S#S#S#S
#S#S#S#S#S
#S#S#S#S#S#S#S#S#S#S
#S#S
#S#S#S#S
#S#S
#S#S
#S#S#S#S#S#S
#S#S#S#S #S#S
#S#S
#S#S #S#S#S#S#S
#S#S
#S#S#S#S
#S#S
#S
#S#S
#S
#S
#S#S
#S#S
#S#S
#S#S
#S#S
#S#S
#S
#S#S
#S
#S
#S#S #S#S#S#S
#S#S#S#S
#S#S
#S
#S#S#S
#S#S
#S
#S#S
#S#S
#S
#S#S
#S
#S#S #S#S#S
#S
#S
#S
#S#S
#S#S
#S
#S
#S
#S
#S
#S
#S#S
#S#S#S
#S
#S
#S
#S#S
#S#S
#S
#S
#S#S
#S#S#S#S
#S#S
#S#S#S
#S#S
#S#S#S#S#S#S
#S
#S#S
#S#S
#S#S#S#S
#S#S
#S#S
#S#S
#S#S
#S#S#S#S
#S
#S#S
#S
#S
#S#S#S
#S#S#S#S
#S#S
#S
#S#S
#S
#S#S
#S#S
#S#S
#S#S
#S
#S
#S#S
#S
#S#S
#S#S
#S#S#S
#S#S
#S
#S#S#S#S
#S#S
#S
#S#S#S
#S#S#S#S
#S#S#S#S#S
#S
#S
#S
#S
#S#S#S
#S#S#S#S#S#S#S
#S#S#S
#S#S
#S
#S#S#S#S#S#S
#S
#S#S#S#S
#S#S
#S#S #S#S
#S#S#S#S
#S
#S
#S
#S#S
#S
#S#S#S#S#S#S#S#S#S#S
#S#S
#S#S
#S#S#S
#S#S
#S#S
#S#S#S
#S#S
#S#S
#S
#S#S
#S
#S#S
#S#S#S
#S#S
#S
#S#S
#S#S#S #S
#S
#S#S
#S
#S#S#S#S #S#S#S#S#S
#S#S
#S
#S
#S#S#S
#S#S#S#S
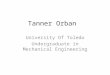
#0 Terminals#S Destinations#S Truck Advisory Zones
700 0 700 1400 Miles
N
EW
S
Terminals & Destinations with TAZ
36 McKenzie Tanker Trucks- 9 with LDW only- 9 with TSA only- 9 with LDW and TSA- 9 control trucks

Evaluation of IVI Generation 0 FOTs
Volvo Collision Warning System with ACC and ECBS
100 U.S. Xpress Long-Haul Trucks- 50 with ACC & ECBS- 50 control trucks

Evaluation of IVI Generation 0 FOTs
Freightliner Roll Advisor and Control (RA&C) System
RSA
RSA
Severity
RISKY MANEUVER
DETECTED
Level 1 (Threshold Lateral Acceleration)
ROLLOVER RISK
DETECTED
REDUCE SPEED
AT LEAST 7 MPH
Level 2 (Higher Lateral Acceleration)
HIGH RISK OF
ROLLOVER DETECTED
REDUCE SPEED AT LEAST 12 MPH
Level 3 (Highest Lateral Acceleration Range)
6 Praxair Tanker Trucks- before & after study

Evaluation of IVI Generation 0 FOTs
Evaluation Goals
1. Assess BenefitsA. Safety (highest priority)B. Mobility
C. Efficiency and Productivity
D. Environmental Quality
2. Assess Driver Acceptance and Human Factors
3. Evaluate System Performance
4. Assess Product Maturity for Deployment
5. Identify Institutional and Legal Issues

Evaluation of IVI Generation 0 FOTs
Safety Benefits Methodology – Three Data Sources: Historical Data: National Automotive Sampling System (NASS)
General Estimates System (GES) Historical crash rates (by type) without IVSS Identify “driving conflicts” that precede crashes
Driving Data from Field Operational Tests Determine frequency of driving conflicts – by type of crash Quantify conditions (speed, following interval, etc) at time of
conflict Evaluate driving behaviors (with and without IVSS)
Track Tests Validate crash simulation models Demonstrate system performance

Evaluation of IVI Generation 0 FOTs
General Methodology for Estimating Safety Benefits
CrashDatabases
(GES, FARS)
EstimateConflict
&Crash
ReductionRates
Mack FOT
Volvo FOT
Freightliner FOT
HistoricalConflict
&CrashRates
EstimateFutureCrash
Reductions

Evaluation of IVI Generation 0 FOTs
Partition Data by Driving Conflicts
S1 S2S3
Crashes
(No conflict)(Driving conflict 1)
(Driving conflict 2)
Normal Driving

Evaluation of IVI Generation 0 FOTs
Estimating Reduction in Number of Crashes
DrivenMiles)]C(P)C(P[B wwo Simplest Form
“Prevention Ratio” “Exposure Ratio”FOT Data and
Analytical ModelsFOT Data
From GES
Population Statistics
Useful form
i iwoiwo
iwiwwowo SPSCP
SPSCPCSPNB
i]
)()|(
)()|(1[)|(

Evaluation of IVI Generation 0 FOTs
“Rear-End” Driving Conflicts
Conflict Number
(Si)
Conflict Definition Relative Frequency forHeavy Trucks
Rear-end.1 Truck is traveling at a constant speed and encounters a lead vehicle traveling at a lower speed.
72%
Rear-end.2Truck is decelerating and encounters a lead vehicle, already in this vehicle’s lane, traveling in the same direction.
7%
Rear-end.3 Truck is changing lanes or merging and encounters a lead vehicle traveling at a lower speed.
2%
Rear-end.4Truck encounters a stopped vehicle in lane.
2%
Rear-end.5 Truck is traveling at a constant speed and encounters a lead vehicle decelerating.
1%
Sum 84%

Evaluation of IVI Generation 0 FOTs
Potential Rear-End Conflict: A Cut-In
Position vs. Time

Evaluation of IVI Generation 0 FOTs
Some Preliminary Results
Freightliner FOT: Roll Advisor & Control SystemRSA
RSASeverity
RISKY MANEUVER
DETECTED
Level 1 (Threshold Lateral Acceleration)
ROLLOVER RISK
DETECTED
REDUCE SPEED
AT LEAST 7 MPH
Level 2 (Higher Lateral Acceleration)
HIGH RISK OF
ROLLOVER DETECTED
REDUCE SPEED AT LEAST 12 MPH
Level 3 (Highest Lateral Acceleration Range)

Evaluation of IVI Generation 0 FOTs
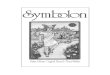
A Rollover Conflict: High Speed in Turn
-0.4-0.3-0.2-0.10.00.10.20.30.4
0 10 20 30 40
Time, s
Ay
, g
65% of static rollover threshold
-250
-200
-150
-100
-50
0
0 50 100 150 200 250
east (m)
no
rth
(m
)
Lateral Acceleration vs. Time

Evaluation of IVI Generation 0 FOTs
How to Apply Crash Reduction Equation
From GES “Prevention Ratio” “Exposure Ratio”
i iwoiwo
iwiwwowo ][
)S(P)S|C(P
)S(P)S|C(P1)C|S(PNB
i
1. Count conflicts
2. Simulate probability of a crash
3. Determine historical rates.

Evaluation of IVI Generation 0 FOTs
Estimated Exposure Ratio
Rol
love
r Ris
k R
atio
-1
0
1
2
3
Driver2010 2020 2030 2040 2050
Driver-Specific Ratios
(with 95% confidence limits)Without RA&C
With RA&C
Conflicts 90 70
VMT 225,000 250,000
Conflicts per 1,000 VMT
0.40 0.28
Exposure Ratio 0.70
Hypothetical Results

Evaluation of IVI Generation 0 FOTs
Estimating the Prevention Ratio
“Prevention Ratio”
i iwoiwo
iwiwwowo SPSCP
SPSCPCSPNB
i]
)()|(
)()|(1[)|(

Evaluation of IVI Generation 0 FOTs
Estimating the Prevention Ratio Approach:
Simulate crashes under actual conflict conditions (using time domain vehicle dynamic model)
Generate a statistical distribution of possible speeds
Select variance to match historical crash rates to simulated average w/o RA&C
Actual
Conflict
Speed
in Actual Conflict
(mph)
Simulated Roll Speed
(mph)
S1 50 53
S2 45 49
S3 43 45
. . .
. . .
. . .
S90 61 64
Example Simulation Results
i iwoiwo
iwiwwowo SPSCP
SPSCPCSPNB
i]
)()|(
)()|(1[)|(

Evaluation of IVI Generation 0 FOTs
Statistical Distribution of Possible Speeds for Each Conflict
Variance parameter selected to match FOT and historical
crash rates (w/o RA&C)
vjActual speed of this conflict
Variance = (σ · vi,j)2
vj,RSpeed where this
conflict leads to a roll
P(C|S1,j)
Probability that a crash occurs,
given this conflict
Hypothetical Result: Average Pw(C|S)/Pwo(C|S) = 1.2

Evaluation of IVI Generation 0 FOTs
Benefits Calculation (Hypothetical)
preventedyearcrashes /7
i iwoiwo
iwiwwowo ][
)S(P)S|C(P
)S(P)S|C(P1)C|S(PNB
i
]70.020.11[55.084
]16.0[46
Tank trailersToo fast in a curve
Similar calculations performed for all tractor trailers and all large trucks. These fleets account for 471 and 787 rollovers per year, respectively, without RA&C

Evaluation of IVI Generation 0 FOTs
Schedule for Completion of Final Reports Freightliner – June 2003
Volvo – Early 2004
Mack – Early 2005
DOT Release Dates TBD

Evaluation of IVI Generation 0 FOTs
Discussion Topics
John Orban Background – Intelligent Vehicle Initiative Safety Benefits Methodology Some Preliminary Findings
Gino Mastrippolito Nationwide Data Acquisition Challenges Nationwide Data Acquisition Solution

Evaluation of IVI Generation 0 FOTs
Intelligent Vehicle Initiative VOLVO Field Operational Test

Evaluation of IVI Generation 0 FOTs
Intelligent Vehicle Initiative VOLVO Field Operational Test
• Acquire data from 100 Class-8 Trucks for 2 years
• 50 Trucks will have advanced safety systems• 50 Trucks will be “control” vehicles
• 30 with CWS, 20 without CWS (later converted)
• Trucks operated in normal revenue generating service by a nationwide commercial carrier.
• Record data relevant to potentially hazardous situations
• Get data from trucks and change test parameters WITHOUT interfering with the truck’s activity
Data Acquisition Challenge

Evaluation of IVI Generation 0 FOTs
Interfaces to sensors, GPS and multiple vehicle data buses. Record data in histogram format during all vehicle
operations.• Vehicle operation history and statistics of vehicle activity.
Record data in time history format when trigger conditions are met.
• Potentially hazardous situation record.• Pre-trigger collects 10 seconds prior then 5 seconds post
trigger. Transfers the status and data to a central facility regularly. Operating parameters may be modified during test. Provide access to data for review by several groups.
Intelligent Vehicle Initiative VOLVO Field Operational Test
Data Acquisition Challenge

Evaluation of IVI Generation 0 FOTs
Instrumentation System
Intelligent Vehicle Initiative VOLVO Field Operational Test
VISION (Versatile Information System
Integrated ON-line)
GPS SATELLITES
NATIONWIDE TRUCK FLEET
DATA ACQUISITION SYSTEM
CELLULAR TELECOMMUNICATIONSHIGH PERFORMANCE
COMPUTING
AUTOMATED DATA HARVESTING
ANALYST/CUSTOMER

Evaluation of IVI Generation 0 FOTs
On-Board Data Acquisition System PC-104 based embedded
computer system Real-time operating system Analog and digital interfaces Serial Bus Interfaces Removable solid-state
memory card User Programmable and
Re-programmable Custom Features
CWS interface Integrated cellular modem Integrated bi-axial accel. Front panel connectors
Intelligent Vehicle Initiative VOLVO Field Operational Test

Evaluation of IVI Generation 0 FOTs
SAE J1939 Data Bus Road Speed Throttle Percentage Brake Pedal Percentage Service Brake Application Brake Pressure Cruise Control Status Odometer Ambient Temperature ABS Status
SAE J1708 Data Bus Vehicle Identification Number Fault Codes
GPS Receiver GPS Location GPS Time (Greenwich Mean)
VORAD Data Bus Following Distance Relative Velocity Relative Acceleration DDU Light Status DDU Audio Status Target ID Target Azimuth
Analog Sensors Steering Position Lateral Acceleration Longitudinal Acceleration
Derived Parameters Following Interval Time-to-Collision Kinetic Motion Steering Wheel Rate
Data Parameters Monitored
Intelligent Vehicle Initiative VOLVO Field Operational Test

Evaluation of IVI Generation 0 FOTs
Lateral Acceleration > 0.2 g’s Fore/Aft Accel > 0.25g when brake applied Steering Rate > 120 °/sec when speed is > 30 mph ABS active Kinetic Motion Conditions (Battelle and Volpe derived) Time-to-Collision less than 4 seconds when road
speed > 20 mph (for minimum of .66 seconds) Following interval < 0.5 seconds when road speed >
11 mph (for minimum of 0.5 seconds)
Trigger Conditions
Intelligent Vehicle Initiative VOLVO Field Operational Test

Evaluation of IVI Generation 0 FOTs
Data and Video Viewed from Database

Evaluation of IVI Generation 0 FOTs
• Active project acquiring, transferring and archiving data from a nationwide fleet of trucks.
• Programmable/Reprogrammable on-board acquisition system.
• Interface to many communications systems.
• Automated database loading.
• World Wide Web database interface.
• Graphical User Interfaces.
• Standard and evolving data mining tools.
• Valuable Test and Evaluation tool for many years/projects.
Intelligent Vehicle Initiative VOLVO Field Operational Test
Summary

Evaluation of IVI Generation 0 FOTs
Acknowledgements
Safety Benefits Methodology Anne-Claire Christiaen, Jeff Hadden, Nancy McMillan,
Vangal Narendran, Michael Neighbor, Doug Pape, Steve Shaffer, Greg Stark (Battelle)
Wassim Najm (Volpe NTSC)
Data Collection Methodology VISION Team (U.S. Army ATC)
U.S. DOT Sponsors (FMCSA, NHTSA, FHWA) August Burgett, Tim Johnson, Jim Britell, Bob Miller