Embed Size (px)
Citation preview

Full Terms & Conditions of access and use can be found athttp://www.tandfonline.com/action/journalInformation?journalCode=tphm20
Download by: [ JH Libraries] Date: 04 August 2016, At: 08:21
Philosophical Magazine
ISSN: 1478-6435 (Print) 1478-6443 (Online) Journal homepage: http://www.tandfonline.com/loi/tphm20
Evaluating the effects of loading parameters onsingle-crystal slip in tantalum using molecularmechanics
Coleman Alleman, Somnath Ghosh, D.J. Luscher & Curt A. Bronkhorst
To cite this article: Coleman Alleman, Somnath Ghosh, D.J. Luscher & Curt A.Bronkhorst (2014) Evaluating the effects of loading parameters on single-crystal slipin tantalum using molecular mechanics, Philosophical Magazine, 94:1, 92-116, DOI:10.1080/14786435.2013.843795
To link to this article: http://dx.doi.org/10.1080/14786435.2013.843795
Published online: 01 Oct 2013.
Submit your article to this journal
Article views: 231
View related articles
View Crossmark data
Citing articles: 4 View citing articles

Philosophical Magazine, 2014Vol. 94, No. 1, 92–116, http://dx.doi.org/10.1080/14786435.2013.843795
Evaluating the effects of loading parameters on single-crystal slip intantalum using molecular mechanics
Coleman Allemana, Somnath Ghoshb∗, D.J. Luscherc and Curt A. Bronkhorstc
aGraduate Research Associate, Johns Hopkins University, Addr: 203 Latrobe Hall,3400 N. Charles St., Baltimore, MD 21218, USA; bMichael G. Callas Professor, Johns Hopkins
University, Baltimore, MD 21218, USA; cTheoretical Division, Los Alamos National Laboratory,Los Alamos, NM 87545, USA
(Received 7 March 2013; accepted 9 September 2013)
This study is aimed at developing a physics-based crystal plasticity finite elementmodel for body-centred cubic (BCC) metals, through the introduction of atomic-level deformation information from molecular dynamics (MD) investigations ofdislocation motion at the onset of plastic flow. In this study, three critical variablesgoverning crystal plasticity mediated by dislocation motion are considered. MDsimulations are first performed across a range of finite temperatures up to 600K toquantify the temperature dependence of critical stress required for slip initiation.An important feature of slip in BCC metals is that it is not solely dependent onthe Schmid law measure of resolved shear stress, commonly employed in crystalplasticity models. The configuration of a screw dislocation and its subsequentmotion is studied under different load orientations to quantify these non-Schmideffects. Finally, the influence of strain rates on thermal activation is studied byinducing higher stresses during activation at higher applied strain rates. Functionaldependence of the critical resolved shear stress on temperature, loading orienta-tion and strain rate is determined from the MD simulation results. The functionalforms are derived from the thermal activation mechanisms that govern the plasticbehaviour and quantification of relevant deformation variables. The resultingphysics-based rate-dependent crystal plasticity model is implemented in a crystalplasticity finite element code. Uniaxial simulations reveal orientation-dependenttension–compression asymmetry of yield that more accurately represents single-crystal experimental results than standard models.
Keywords: crystal plasticity; molecular dynamics; tantalum; non-Schmid effects;strain rate; thermal activation; embedded atom method; finite element method;tension–compression asymmetry
1. Introduction
Deformation and ductile fracture of polycrystalline materials are complex processes in-volving various physical phenomena that are typically independently characterized acrossa hierarchy of disparate length and time scales. These characterizations depend on systemparameters ranging from the local arrangement of atoms in the crystal lattice to the orien-tation of the macroscopic loading path to the details of the structural configuration of the
∗Corresponding author. Email: [email protected]
© 2013 Taylor & Francis
Dow
nloa
ded
by [
JH L
ibra
ries
] at
08:
21 0
4 A
ugus
t 201
6

Philosophical Magazine 93
material. In order to model plasticity and failure in a robust and consistent way, a multiscalemodel must be developed to incorporate various characterizations of material behaviourinto a single coherent framework. As an example, it is of significant interest to use theresults of molecular dynamics (MD) simulations of screw dislocation motion in single-crystal tantalum (Ta) to inform a phenomenological crystal plasticity model of thermallyactivated slip. By incorporating quantitative information from atomic-scale simulationsinto the crystal plasticity model, a more accurate, physics-based model can be derived.The atomic-scale characterization developed in this paper includes effects on the criticalresolved shear stress (CRSS) of body-centred cubic (BCC) Ta due to loading orientation,temperature and strain rate.
The effect of loading orientation on plastic deformation of BCC metals has been a topicof significant interest to the research community dealing with deformation and damage inmetals. The Schmid law has been conventionally used to characterize the dependence ofthe resolved shear stress on loading orientation in the form of a simple geometric formula[1]. While this law has been found to be widely applicable to face-centred cubic (FCC)materials, the relationship between the CRSS and the loading orientation suggested by theSchmid law is violated in BCC materials. This behaviour has been attributed to the so-callednon-Schmid effects, first observed experimentally by Taylor in his experiments [2,3]. In thefirst paper [2], the orientation of shear bands in BCC iron was found to be dependent onthe direction of the principal applied stress rather than the lattice orientation. In the secondpaper [3], an asymmetry was found in the resistance to shear when the sense of the shearwas reversed in BCC brass. In general, these non-Schmid effects are characterized by thedependence of the CRSS on the sense of shear, as well as on stress components that do notgive rise to a Peach–Koehler force acting on the dislocation [4]. These effects, intrinsic tothe BCC crystal structure, are attributed to the lack of prescribed symmetry for slip in the〈1 1 1〉 direction except on {1 1 0} planes and on the non-planar core configurations of screwdislocations.
A number of experimental results have confirmed the presence of non-Schmid effectsin BCC metals in general and specifically in Ta. Cogent reviews of these effects are givenin, for example, [5,6]. Experiments at 4.2 K in [7], and at 77 K and 273 K respectively in[8,9] have demonstrated that orientation dependence of the yield stress for single-crystal Taspecimens does not conform to the Schmid law across a range of temperatures. Results ofthese experiments assert that the orientation dependence is due partly to the asymmetry ofthe Peierls potential for movement in the {1 1 2} planes. However, it has been concludedthat this effect is insufficient to explain the orientation dependence in isolation [9]. Tensiletests performed on Ta single crystals across a range of temperatures from 77 K to 483 K atrates of ε ≈ 10−5s−1 and 10−6s−1 indicate a breakdown of the Schmid law and suggestthat apparent {1 1 2} 〈1 1 1〉 slip could actually be cooperative motion on two {1 1 0} planes[10].
In addition to the loading orientation, temperature and strain rate play important rolesin the determination of the CRSS for BCC metals. There is a characteristic time scale overwhich slip is thermally activated, and the applied strain rate determines the magnitude ofthe applied stress during this time. Since the applied stress affects the amount of thermalenergy required to activate slip, the effects of temperature and strain rate on the CRSSare coupled. For example, experiments inducing
(1 0 1
)[1 1 1] slip in Ta single-crystal
tensile specimens across a range of temperatures from 4.2 K to 550 K at strain rates ofε ∼ 10−4s−1 and 10−2s−1 show that the athermal limit (the temperature above which the
Dow
nloa
ded
by [
JH L
ibra
ries
] at
08:
21 0
4 A
ugus
t 201
6

94 C. Alleman et al.
flow stress is constant) varies with applied strain rate [11]. This effect gives some indicationof the interplay between temperature and strain rate in the thermal activation of dislocationmotion, which is the dominant mechanism of slip at most temperatures and strain rates. Theconnection between temperature and strain rate is also revealed at the limits of the thermalactivation model at extremely low temperatures or high strain rates, where slip becomes astress-driven process.
A significant volume of numerical modelling work has been devoted to studying variousaspects of single-crystal slip in BCC materials. Early atomistic studies focused on thedissociation of a 1
2 (1 1 1) screw dislocation [12], where quantification of the dissociationfor a family of {1 1 0} planes was performed. Subsequently, it was shown that while stablestacking faults were not likely to form in BCC materials [13], elastic anisotropy of thecrystal could produce generalized stacking faults [14], inducing a stable dislocation coreconfiguration spread onto a number of slip systems [15]. It has been found that asymmetryin the dislocation core relative to loading orientation produces an asymmetry in the stressrequired to move the dislocation [16]. More recent work has extended the analysis ofdislocation behaviour with atomistic studies as in, for example, [17].
Modelling work at higher scales, for example, in [18] has employed the mechanicalthreshold stress (MTS) model to conform to experimental results at 298K and 773K.These results have shown that the yield and flow stresses of Ta polycrystals are verysensitive to the temperature and strain rate, but the hardening behaviour is less sensi-tive to these loading parameters. The authors in [18] have argued that this points to thethermal activation of overcoming the Peierls barrier as the rate-controlling mechanismfor high strain-rate deformation. Further experiments on mildly textured polycrystallineTaylor cylinders [19] have shown that while the MTS model provides a reasonable fitto the data, it requires separate calibration for different ranges of temperature and strain-rate conditions. Modelling of some recent experiments on a tantalum top-hat sample in[20] has used a combination of the MTS model and a crystal plasticity model of ther-mally activated dislocation motion to study the formation of shear bands. Recent workin [21] has suggested that it is necessary to include non-Schmid effects in dislocationdynamics simulations to adequately model experimentally observed tension–compressionasymmetry. The theory of crystal plasticity already incorporates much of the strain rateand temperature sensitivity found in the experimental results mentioned above. However,numerical implementation of the theory for finite element simulation typically does notinclude the influence of non-Schmid effects. Additionally, there is still a need for a betterphysics-based informed understanding of the slip mechanisms to be incorporated in thecrystal plasticity numerical models that can be extended to applications of extreme loadingconditions.
The present study is motivated by the need to create a physical basis for the functionalforms and quantifications of slip system parameters for crystal plasticity finite elementmodelling. Section 2 outlines a basic framework of crystal plasticity theory. Section 3describes the molecular dynamics model developed to provide the necessary tools formodelling along with validation studies with respect to various parameters. The crystalplasticity model parameters are extracted from MD simulation data and the rationale forthe non-Schmid effects are discussed in Section 4. A finite element implementation of themodel and simulation results are presented in Section 5.
Dow
nloa
ded
by [
JH L
ibra
ries
] at
08:
21 0
4 A
ugus
t 201
6

Philosophical Magazine 95
2. The Crystal plasticity constitutive modelling framework
The crystal plasticity representation of slip behaviour forms the basis for investigations per-formed in this study. Crystal plasticity theory is primarily concerned with the interpretationof plastic flow in crystalline materials as an aggregate of slip processes that is proceed bythe movement of dislocations on well-defined slip systems [22]. Plasticity thus conceivedis anisotropic, with the form of anisotropy governed by the structure of the crystal latticeand the configuration of defects in the lattice. Some details and assumptions of the rate-dependent crystal plasticity model [20,23,24] that are examined in this study are describednext.
The deformation gradient tensor F is taken as the fundamental representation of defor-mation in the crystal plasticity framework. This tensor is multiplicatively decomposed intothermo-elastic and plastic parts Fe and Fp as:
F = FeFp (1)
The thermo-elastic part of the Lagrangian strain tensor is then defined as:
Ee = 1
2
[(Fe)T Fe − I
](2)
The Cauchy stress is related to the thermo-elastic strain Ee and the temperature Tthrough the relation:
σ = 1
det (Fe)Fe
C : [Ee − Ath (T − T0)]
FeT (3)
where C is an anisotropic elasticity tensor with cubic symmetry, Ath is a second-orderthermal expansion tensor and T0 is a reference temperature.
For the BCC crystal plasticity model, slip is assumed to occur in a 〈1 1 1〉 direction alonga {1 1 0}, {1 1 2} or {1 2 3} slip plane, for a total of up to 48 potential slip systems [22]. Eachslip system α in the crystalline lattice is characterized by a slip plane with normal nα anda slip direction mα . According to the Schmid law, the resolved shear stress driving slip onthe system α is given by the projection of the Kirchhoff stress as:
τα = (mα ⊗ nα) : det (F) σ (4)
The resulting slip is characterized by the flow rule, which expresses the slip rate γ α as afunction of the resolved shear stress τα and temperature T . The flow rule [20,24] is statedas:
∀ ταeff = ∣∣τα
∣∣− μ
μ0sα
a > 0
γ α = γ0 exp
(−�Gk0
kB T
⟨1.0 −
⟨τα
effμμ0
sα0
⟩p⟩q)sign
(τα)
(5)
where 〈〉 is the Macaulay bracket expressed as 〈x〉 = 12 (|x | + x). In this equation, sα
0 is theintrinsic slip system resistance due to the Peierls barrier and sα
a is an evolving athermal slipsystem resistance due to long-range barriers such as dislocation density. The parameters μ
and μ0 are the temperature-dependent and reference (0K) shear moduli, respectively, andthe ratio μ/μ0 scales the slip system resistances with temperature. The model parameters�Gk0 , p, q and γ0 are generally empirically or phenomenologically derived from analyses
Dow
nloa
ded
by [
JH L
ibra
ries
] at
08:
21 0
4 A
ugus
t 201
6

96 C. Alleman et al.
of thermal activation. The deformation-induced velocity gradient L = FF−1 is additivelydecomposed into elastic and plastic parts as L = Le+Lp, where the plastic part is expressedas the summation of the slip rates γ α due to dislocation glide on all systems as:
Lp = Fp(Fp)−1 =∑α
γ αmα ⊗ nα (6)
The plastic deformation gradient Fp can be determined using Equation (6), whileEquation (1) determines Fe, from which the stresses are evaluated using Equation (3).Equations (1)–(6) thus form a closed set that can be solved, along with the appropriateboundary conditions, within a numerical scheme such as the finite element method.
The flow rule in Equation (5) for thermally activated slip, which relates plastic slip rate totemperature, resolved shear stress and lattice slip resistance, is used to create a link betweenthe crystal plasticity model and the atomic-scale processes observed in the MD simulationsperformed in this study. The functional form of the flow rule is generally developed throughcharacterization of a number of critical dependencies, which are each subjected to studyvia MD here to examine and re-evaluate this functional form. The flow rule is based on theOrowan equation, which relates the plastic slip rate γ α to the dislocation density ρm andthe dislocation velocity vα
d on a slip system α as:
γ α = bρmvαd (7)
where b is the magnitude of the Burger’s vector. The dislocation velocity is characterizedthrough an Arrhenius relation for thermal activation, and is expressed as the product of thejump length, the characteristic frequency v∗
0 and the probability that at a given temperatureT , a particular thermal fluctuation attains a threshold energy �Gα
k , as:
vαd = bv∗
0exp
(−�Gα
k
kB T
)(8)
An empirical form has been used in [25] to model the dependence of the activation energy�Gα
k on the effective resolved shear stress as:
�Gαk = �Gk0
⟨1 −
⟨τα
eff
τ0
⟩p⟩q(9)
where �Gk0 is the activation energy required to activate slip in the absence of an appliedstress, and p and q are empirical parameters. The critical shear stress needed to initiateslip without thermal activation is τ0 = μ
μ0sα
0 , the intrinsic lattice resistance scaled by thetemperature dependence of the shear modulus. The flow rule in Equation (5) results from acombination of Equations (7)–(9).
As a result of the evolving plastic deformation, the temperature and athermal slipresistance also evolve in the material. The rate of change in temperature induced by theplastic work is characterized by
T = η
ρcρ
∑α
ταγ α (10)
Dow
nloa
ded
by [
JH L
ibra
ries
] at
08:
21 0
4 A
ugus
t 201
6

Philosophical Magazine 97
where η is an efficiency factor that determines the amount of plastic work which is convertedinto heat. The athermal slip system resistance evolves as
sαa =
∑β
[r + (1 − r) δαβ
]hβ∣∣γ β∣∣ (11)
This evolution equation takes into account self-hardening through dislocation pile-upon the slip system α and latent hardening due to dislocation density on the other slip systemsα = β via the material parameter r . The self-hardening rate is, as given in [26],
hβ = h0
(sβ
s − sβa
sβs − sβ
a0
)(12)
where sβa0 is the initial athermal resistance, and the evolution of the saturation stress sβ
s isgiven by [27]
sαs = ss0
(γ α
γ0
) kB TA
(13)
where A is an empirical parameter.In the ensuing study, MD simulations are performed to quantify the effects of: (i)
temperature via parameters p and q in Equation (9), (ii) loading orientation via the functionalform of τα , and (iii) strain rate via the probability of slip in Equation (8). The simulationprocedures are discussed in detail in the next section followed by a presentation of theresults.
3. Atomistic simulations with MD: model details and validations
Molecular dynamics simulations, using the software LAMPPS [28], are used to evaluatethe crystal plasticity variables related to the CRSS at which dislocation motion is initiated.
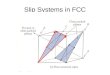
Figure 1. Illustration of MD simulation System 3 depicting dimensions and the crystal orientation.A velocity is applied to the dark grey atoms near the x1 and x2 boundaries. The vector ξ representsthe orientation of the dislocation line.
Dow
nloa
ded
by [
JH L
ibra
ries
] at
08:
21 0
4 A
ugus
t 201
6

98 C. Alleman et al.
All simulations are carried out in the canonical ensemble (NVT) across a range of thermostattemperatures from 0.1K to 600K. An initial atomic configuration is shown in Figure 1. Slipin BCC Ta is primarily mediated by the motion of 〈1 1 1〉 screw dislocations [29], and hencethe MD model is developed to manifest this configuration. The crystal lattice is orientedso that the [1 1 1] crystal direction and dislocation line are parallel to the x3 axis, [1 2 1]is parallel to the x1 axis and [1 0 1] is parallel to the x2 axis. Dislocation motion in allthe simulations proceeds along a combination of the (1 0 1) and (0 1 1) planes. Due to thegenerally non-linear nature of this motion due to finite temperature effects, slip cannotgenerally be assigned to a single slip system.
There are three simulation cells used in this study. For each, the simulation cell sizeis (lx1 = 64 nm) × (lx2 = 56 nm) in the x1 − x2 plane. In the x3 direction, the cell sizesare lx3 = 3.4 nm (System 1), lx3 = 9.1nm (System 2) and lx3 = 13.7nm (System 3). Thecells contain approximately 6.9 × 105, 1.8 × 106 and 2.8 × 106 atoms of Ta, respectively.Periodic boundary conditions are applied in the x3 direction to approximate a straight,infinitely long dislocation with the line direction shown in Figure 1. Displacement boundaryconditions are applied in the x1 and x2 directions by moving atoms near the |x1| = 28 nmand |x2| = 32 nm boundaries at a constant velocity, corresponding to a displacement fieldprescribed in Equation (20) of Section 3.4. Virial stresses, defined in Section 3.2, nearthe dislocation core are evaluated in a prismatic region with dimensions |x1| ≤ 16 nm,|x2| ≤ 19 nm and x3 = depth of the simulation box. The MD simulations are conducted fortotal times of 2 to 10 ns, using a constant time step of 2.0 fs each, resulting in 1 − 5 × 106
time steps. Details of the simulation methodology are presented next.
3.1. Interatomic potential for MD simulations
At least three essential features must be considered for any empirical potential to be usedin this study. The potential must:
(1) accurately reproduce the elastic behaviour of Ta, providing correct estimations ofthe anisotropic elastic moduli;
(2) give a suitable result for the estimation of the relevant γ -surfaces for Ta thatrepresent barriers to plastic flow; and
(3) produce the correct dislocation core configuration for a screw dislocation in Ta.
A number of central-force interatomic potentials have been developed for Ta, for whichcomputational efficiency is gained by calculating only pairwise interactions. They includethe Finnis–Sinclair potential in [30], and the embedded atom method or EAM potentialsdeveloped for Ta in [31,32]. These potentials model interatomic interactions, accountingfor the electron density [33] without characterizing any angular dependence of the density.Hence, they do not capture any directionality of the bonding in BCC materials. Moresophisticated potentials have been proposed to account for directional bonding in BCCmaterials; for example, modified generalized pseudo-potential theory or MGPT in [34,35],angular-dependent interatomic potential orADPin [36], modified embedded atom method orMEAM in [37] and the bond-order potentials or BOP in [38]. However, the computationalcost for these potentials is much higher than that for those without directionality, whichrestricts application to smaller molecular systems.
Dow
nloa
ded
by [
JH L
ibra
ries
] at
08:
21 0
4 A
ugus
t 201
6

Philosophical Magazine 99
The following discussion will show that the central-force EAM potential developed in[31] satisfies the above three conditions with high efficiency and may be used for simulatinglarger systems. This potential has been used in atomistic simulations of the structure ofsmall clusters [39], grain coalescence [40], collapse of nano-voids in Ta [41] and recentlyin the study of fracture behaviour [42]. The larger simulation box size allowed by use ofa simpler potential makes it less likely that spurious stresses introduced by the boundaryconditions will influence the initiation of slip. Also, it reduces the chances of suppressingslip mechanisms due to the imposition of a rigidly straight dislocation line through periodicboundary conditions with a very small dimension along the dislocation line length. It shouldbe noted that the value of the Peierls stress estimated by each potential is different, and thisdeserves significant attention that is beyond the scope of the current investigation. Generally,none of the studies performed using these potentials have been able to reproduce empiricallyderived values of the Peierls stress in Ta [35,43]. Consequently, the values obtained fromthe MD simulations need to be scaled to an appropriate value before being applied to acrystal plasticity framework.
The EAM model in [31] is used to model deformation in Ta in this study. The functionalform of the interaction potential is:
U = 1
2
∑i = j
V(ri j)−
∑i
F (ρi ), where (14)
ρi =∑
j
φ(ri j)
(15)
Here, V(ri j)
is the pair-potential function and F (ρi ) is the embedding function. Theelectron density for atom i is obtained by summing the contributions of neighbouring atomsj through the use of the distance-dependent density function φ
(ri j). Discrete values of the
functions, used in MD simulations, are obtained by fitting cubic splines to match forcesfrom the empirical potential to those from ab-initio calculations. In the following sections,MD model validation is carried out with respect to each of the three requirements above.
3.2. Validation of MD model for elastic behaviour
A displacement-controlled MD simulation is performed to create a deformation field thatcan aid in the evaluation of the critical stress required to move a dislocation and initiateslip. To achieve this deformation field, a constant strain rate ε0 in the x3 direction is appliedthrough the imposition of the following atomic displacements on boundary atoms; that is,
x1(t) = X1
x2(t) = X2
x3(t) = ε0t [sin (φ) X1 + cos (φ) X2] + X3 (16)
Here, the angle φ controls the orientation of the MRSSP. It is possible to express thedeformation gradient F = ∂x
∂X in Equation (1) from the atomic displacements in Equation(16), assuming a homogeneous deformation field. Then, from Equation (2), the elasticLagrangian strain tensor may be expressed as:
Dow
nloa
ded
by [
JH L
ibra
ries
] at
08:
21 0
4 A
ugus
t 201
6

100 C. Alleman et al.
0 0.02 0.04 0.060
1
2
3
4
Strain
Stre
ss [
GPa
]
23c
13c
12c
23a
13a
12a
Figure 2. Comparision of the evolution of the atomistic virial stress σ a from Equation (19) and theCauchy stress σ c from Equation (18) as a function of the applied strain ε0t .
Ee = 1
2
⎡⎣ (ε0t)2 sin2(φ) (ε0t)2 cos(φ) sin(φ) ε0t sin(φ)
(ε0t)2 cos(φ) sin(φ) (ε0t)2 cos2(φ) ε0t cos(φ)
ε0t sin(φ) ε0t cos(φ) 0
⎤⎦ (17)
The effects of temperature will be neglected in this derivation for simplicity of presentation.Components of the corresponding Cauchy stress tensor σ c in a perfect lattice, experiencingthe strain field in Equation (17), may be written using Equation (3) as:
σ c11 = μ2 sin(φ) (ε0t) + O
[(ε0t)2
]σ c
22 = −μ2 sin(φ) (ε0t) + O[(ε0t)2
]σ c
33 = O[(ε0t)2
]σ c
23 = μ1 cos(φ) (ε0t) + O[(ε0t)2
]σ c
13 = μ1 sin(φ) (ε0t) + O[(ε0t)2
]σ c
12 = μ2 cos(φ) (ε0t) + O[(ε0t)2
]
(18)
where μi , i = 1, 2, 3, are the anisotropic shear moduli in the appropriate directions.Additionally, the atomistic virial stress components σ a
i j are assumed to be analogous tothe Cauchy stress components in Equation (18), with the virial stress being defined for thesimulation box as:
σ ai j = − 1
Vbox
[N∑k
(mkvk
i vkj
)+
N∑k
(rk
i f kj
)](19)
Here, i, j = 1, 2, 3 correspond to the xi directions and k is the identifier of an atom inthe ensemble containing N atoms in a simulation box of volume Vbox . The components ofvelocity and position vector for atom k are vk
i and rki respectively, while f k
j is the force on theatom of mass mk resulting from pairwise interaction. Figure 2 compares the evolution of the
Dow
nloa
ded
by [
JH L
ibra
ries
] at
08:
21 0
4 A
ugus
t 201
6

Philosophical Magazine 101
atomistic virial stress σ a in Equation (19) with the continuum stress measure σ c in Equation(18) for crystal plasticity simulations. The stresses are plotted as a function of the appliedstrain ε0t . A very good agreement is seen between the MD and crystal plasticity measures ofthe elastic stress–strain response. This indicates that the elastic behaviour of the MD model,especially the elastic constants produced by the potential, corresponds to the experimentallydetermined, temperature-dependent elastic constants in [44]. These constants are similar tothose used in previous crystal plasticity simulations of [20,24].
3.3. Validation of MD model with respect to 〈1 1 1〉 gamma-surface prediction
The γ -surfaces and corresponding generalized stacking fault energies reveal an importantcharacteristic that governs the plastic behaviour of a model material, viz. the resistanceto plastic flow on a given slip system in a perfect crystal. In this study, the relevantγ surfaces are explored by displacing two halves of a perfect lattice split by a givenslip plane and along a given slip direction. During the motion, the atoms are allowed torelax normal to the plane into the equilibrium configuration dictated by the MD potentialemployed.
There are two EAM potentials for Ta available in the literature. The EAM potential ofGuellil and Adams [32] is a modification of the analytical EAM potential developed byJohnson and Oh [45], while the EAM potential of Li et al. [31] is developed by the force-matching method. To determine if either potential is suited for this study, a test is performedto determine their effectiveness in accurately representing the generalized stacking faultenergies predicted from the ab-initio work of [35]. The {1 1 2}/〈1 1 1〉 and {1 1 0}/〈1 1 1〉γ -surfaces produced by MD simulations using these EAM potentials are shown in Figure3. The generalized stacking fault energies represented by the maxima of the curves for the{1 1 0} and {1 1 2} slip systems are evaluated for the two EAM potentials and are comparedagainst ab-initio results from the literature in Table 1. As seen in Table 1, the EAM potentialin [31] matches more closely the maximum energies and separation between the maximafor the {1 1 0}/〈1 1 1〉 slip system found in the ab-initio work of [35]. The error is lowerfor the {1 1 2}/〈1 1 1〉 slip system for the potential in [32], but that potential significantlyunderestimates the difference between the two slip system families. Based on the resultsof this test, the EAM potential of [31] is chosen for this study based on its favourablecomparison to the ab-initio results of [35].
Table 1. Stacking fault energies in eV/Å2 (∗ estimated from figures in the references). Relative errorscompared to the values in [35] are also given.
Method [Ref.] {1 1 0}/〈1 1 1〉 {1 1 2}/〈1 1 1〉 Difference from [35]
Ab initio [36] 0.0524 0.0591 – –Ab initio [35] 0.054∗ 0.062∗ – –ADP [36] 0.0482 0.0574 11% 8%MGPT [35] 0.046∗ 0.055∗ 15% 11%EAM [31] 0.0585 0.0687 8% 11%EAM [32] 0.0614 0.0646 14% 4%
Dow
nloa
ded
by [
JH L
ibra
ries
] at
08:
21 0
4 A
ugus
t 201
6

102 C. Alleman et al.
(a) (b)
Figure 3. γ -surfaces for tantalum generated by two different potential functions for slip systems:(a) {1 1 0}/〈1 1 1〉; and (b) {1 1 2}/〈1 1 1〉. The solid and the dashed curves correspond to the EAMpotential of [31] (used in this study) and [32], respectively.
(a) (b)
Figure 4. Differential displacement maps for a 12 [1 1 1] screw dislocation core: (a) out-of-plane
dislpacements, normalized by b/3; (b) in-plane displacements, magnified by a factor of 10.
3.4. Validation of MD model with respect to screw dislocation core
Changes in the material symmetry near screw dislocation cores play an important role inthe asymmetric behaviour of BCC Ta with respect to the CRSS. To study these effects, theatomic configuration in the MD simulation volume is set up to represent an otherwise perfectTa lattice containing a single-screw dislocation as shown in Figure 1. The configuration ofa screw dislocation in an isotropic medium is given by the displacement field derived in[22] as:
u1 = u2 = 0, u3 = b
2πtan−1
(x2
x1
)(20)
Atoms in the simulation volume are displaced according to this field and then relaxed usingenergy minimization. After energy minimization, the core configuration changes into arelaxed configuration by displacement of atoms near the core, including displacement in
Dow
nloa
ded
by [
JH L
ibra
ries
] at
08:
21 0
4 A
ugus
t 201
6

Philosophical Magazine 103
the x1 − x2 plane. The relaxed core configuration is found to be spread symmetrically onthree {1 1 0} planes, producing a core configuration as shown in Figure 4.
The out-of-plane displacements in the dislocation core shown in Figure 4(a) are in goodagreement with those in [4,43] using a Finnis–Sinclair model for Ta [30], and those usingthe MGPT potential simulations in [34]. While the in-plane displacements for each potentialreveal small variations in the core produced by various potentials, the same symmetry isexhibited.
4. Crystal plasticity model parameters from MD simulation results
4.1. Thermal effects on critical resolved shear stress (CRSS)
Driving plastic slip by thermally activated dislocation motion results in a strong temperaturedependence of the CRSS. Molecular dynamics simulations can provide a characterizationof this dependence, and correspondingly a suite of simulations is carried out at a constantstrain rate ε0 = 5×106s−1 across a range of loading angles −25◦ ≤ φ ≤ 25◦ (cf. Equation(16)) and temperatures 1K ≤ T ≤ 600K. The CRSS is identified from the simulations fromthe stress state in the system when the dislocation begins to move.
Thermal effects at the atomic scale are related to the crystal plasticity framework, forwhich the CRSS is expressed as a function of temperature. This relation is obtained byinverting the relation in Equation (9) and substituting τ α from Equation (32), yielding
τ α = μ
μ0
⎧⎪⎨⎪⎩sα
a + sα0
[1 −
(�Gk
�Gk0
) 1q] 1
p
⎫⎪⎬⎪⎭ (21)
Single-crystal tantalum experiments at a range of temperatures 0.7K ≤ T ≤ 40K in[46] show that the value of the factor �Gk
kB T at the critical stress remains nearly constant
for a fixed strain rate. Experimental strain rates result in a value of �GkkB T = 24, except
below 20K, where it reaches a minimum value of approximately �GkkB T ≈ 10 at 2K [46].
This low temperature behaviour has been attributed to quantum effects on the vibrationalfrequencies of dislocations in the thermal activation process. For models that operate atroom temperature and above, the ratio is generally taken to be constant, yielding:
τ αcr = μ
μ0
⎧⎪⎨⎪⎩sα
a + sα0
[1 −
(C
kB T
�Gk0
) 1q] 1
p
⎫⎪⎬⎪⎭ (22)
Above the athermal limit T = �Gk0CkB
, where Equation (22) cannot be used, the CRSS istaken to be constant. Using this relation, the dependence of the CRSS τ α
cr on temperaturecan be parametrized by fitting to the data as shown in Figure 5.
It is assumed that the temperature dependence of τ αcr does not depend on loading
orientation. Thus, the values of the slip resistances sα0 and sα
a and the parameters p andq are fit to the entire set of MD data. As τ α
cr appears in both Equation (22) and Equation(32), these equations are fit simultaneously to obtain a consistent value. The values of theparameters in Equation (22) are tabulated in Table 2.
The system size lx3 is seen to have some effect on the parameter values as evaluated fromthe simulation results. The behaviour is qualitatively very similar, but for the larger systems
Dow
nloa
ded
by [
JH L
ibra
ries
] at
08:
21 0
4 A
ugus
t 201
6

104 C. Alleman et al.
0 200 400 6000
0.02
0.04
0.06
Temperature[K]
CR
SS
Figure 5. Temperature dependence of τ αcr for System 3. Error bars represent the standard deviation
across the range of loading angles −25◦ ≤ φ ≤ 25◦. The dashed line is fit from Equation (22).
Table 2. Values of coefficients in Equation (22). Values of C are not incorporated in the crystalplasticity models, and the �Gk0 values used in this study are not fit from the MD data, but taken from[20].
Method sα0 (MPa) sα
a (MPa) p q C �Gk0 (J)
MD System 1 4387 409 0.38 1.50 16.2MD System 2 4299 259 0.47 1.55 16.7MD System 3 4361 260 0.47 1.48 17.1CP Model [20] 550 50 0.34 1.66 2.1 × 10−19
CP Model [24] 400 22 0.28 1.34 2.77 × 10−19
at high temperatures, the slip process requires lower applied stress, indicated by the smallervalues of sα
a . At finite applied stress, the two mechanisms of thermally activated dislocationbow-out and kink-pair nucleation are in competition for dislocation movement [47]. Forthe high critical stresses observed in this study, it is expected that dislocation bow-out isthe dominant mechanism, with the limiting case of the motion of a straight dislocation line,where the activation barrier approaches a maximum. To compare the system size lx3 to thelength scales operative in the thermal activation process, it is noted that in [48], the kink-pairformation energy is found to approach an asymptotic value at separations of greater than5.7 nm. The line length in System 3 is more than twice this value. Thus, the range of systemsizes used in this study spans the lower range of the length scales required for kink-pairgeneration. Since there is no obvious changeover observed in the system behaviours, itis argued that the operative mechanism is dislocation bow-out for all the MD simulationsystems. The lower critical stress values in the larger systems at high temperatures areconsistent with larger line lengths, imposing a more relaxed constraint on the straightnessof the moving dislocation. The MD results indicate an upper bound for the activation barrierto dislocation motion, where thermally activated bow-out is the dominant mechanism.
While the values of p and q are, in general, in the same range as those used in crystalplasticity models of [20,24], the values of sα
a and sα0 are significantly higher. Such higher
Dow
nloa
ded
by [
JH L
ibra
ries
] at
08:
21 0
4 A
ugus
t 201
6

Philosophical Magazine 105
values are commonly observed in MD studies. They scale with the higher values of τcr ,and are typically ∼ 2 − 10 times higher for MD simulations than experiments, as notedin [35]. In the finite element crystal plasticity model, the parameter sα
a is interpreted as theeffect of long-range elastic interaction of dislocations. In the MD study, the value of sα
arepresents athermal slip resistance that is due to constraints on the atomistic system that donot necessarily correspond to physical phenomena present in the continuum description. Assuch, the values of sα
a used in the crystal plasticity model are determined from empiricaland theoretical considerations at that scale. Similarly, the value of sα
0 employed in the finiteelement simulations is derived to provide agreement with experimental results.
The value of C is also significantly different than the experimental value due to strain-rateeffects discussed in Section 4.3. Briefly, C is inversely proportional to the athermal limit, orthe temperature beyond which the CRSS is approximately independent of temperature. Thistemperature limit demarcates a point of changeover in behaviour. Beyond this temperature,the time scale of thermal activation is sufficiently shorter than the time scale of stressapplication that stress does not have time to develop beyond an intrinsic lower threshold.Thus, it should be expected that higher strain rates produce lower values of C , i.e. higherathermal limits.
4.2. Load-orientation effects on CRSS
Load orientation is defined as the angle between a reference plane and the MRSSP. Theload-orientation dependence of the CRSS in a crystal plasticity model for BCC crystalsis explored next using atomistic simulations. Let θ denote the angle between the normalnα(θ) to a potential slip plane α, and the normal n to the reference slip plane oriented inthe x2 direction. The Schmid tensor Sα(θ) for the system α in the deformed configurationis expressed as:
Sα(θ) = mα(θ) ⊗ nα(θ) (23)
In the undeformed configuration, the slip direction mα0 (θ) and the slip-plane normal nα
0 (θ)
are respectively written as:
mα0 (θ) =
⎡⎣ 0
01
⎤⎦ , nα
0 (θ) =⎡⎣ sin (θ)
cos (θ)
0
⎤⎦ (24)
In the current configuration corresponding to the displacement field in Equation (16), theupdated slip direction and plane normal are derived to be:
mα(θ) = Femα0 (θ) =
⎡⎣ 0
01
⎤⎦ , nα(θ) = Fe−T nα
0 (θ) =⎡⎣ sin (θ)
cos (θ)
0
⎤⎦ (25)
Here, they are unchanged by the displacement field given by Equation (16). The Schmidtensor in the deformed configuration is:
Sα(θ) =⎡⎣ 0
01
⎤⎦⊗
⎡⎣ sin (θ)
cos (θ)
0
⎤⎦ =
⎡⎣ 0 0 0
0 0 0sin (θ) cos (θ) 0
⎤⎦ (26)
Dow
nloa
ded
by [
JH L
ibra
ries
] at
08:
21 0
4 A
ugus
t 201
6

106 C. Alleman et al.
The resolved shear stress for the slip system defined by the angle θ is derived as:
τα(θ) = det (F) σ : Sα(θ) (27)
= det(Fe) σ : Sα(θ)
= sin (θ) σ13 + cos (θ) σ23
In Equation (27), det (F)σ is the Kirchhoff stress. Since det (Fp) = 1, det (F) = det (Fe)
and the Kirchhoff stress reduces to det (Fe) σ . Additionally, for the loadings characterizedby Equation (16), det (Fe) σ = σ , since det (Fe) = 1. The orientation of the MRSSP,defined by the angle χ , is obtained from the maximum condition of the resolved shearstress with respect to θ as:
∂τα(θ)
∂θ
∣∣∣∣θ=χ
= cos (χ) σ13 − sin (χ) σ23 = 0 =⇒ tan (χ) = σ13
σ23(28)
In the MD system, the angle φ is used to control the orientation of the MRSSP throughthe displacement field specified in Equation (16). A first-order approximation in ε0t leadsto:
tan (χ) = σ13
σ23≈ tan (φ) (29)
The angle χ representing the orientation of the MRSSP in MD simulations is calculatedfrom the atomic stresses and is used to assess orientation dependence of the CRSS in thecrystal plasticity model.
Under the Schmid law, typically employed in crystal plasticity models, the resolvedshear stress that drives dislocation motion on a given slip system is simply the projection ofthe stress tensor onto the slip system, given by Equation (4). The spreading of the dislocationcore, however, introduces a dependence on the non-glide stresses that are not representedby the Schmid law. This non-Schmid behaviour is represented generally by a modificationof the resolved shear stress given in [49,50] as:
τ α = τα +Nns∑i=1
aαi τα
i (30)
where τα is the resolved shear stress from the Schmid law, and the additional Nns non-Schmid terms in Equation (30) can be interpreted as non-glide stresses corresponding to theresolved shear stresses on Nns additional slip systems. The specific form of sum of tensorprojections used in this study is given in [51,52] as:
τ αcr = (mα ⊗ nα) : σ cr + a1
(mα ⊗ nα
1
) : σ cr+a2 [(nα × mα) ⊗ nα] : σ cr + a3
[(nα
1 × mα)⊗ nα
1
] : σ cr(31)
This form of the effective resolved shear stress includes the standard Schmid lawresolved shear stress τα = (mα ⊗ nα) : σ , as well as the non-Schmid contributions fromshear stresses on the slip plane nα perpendicular to the slip direction, a2 [(nα × mα) ⊗ nα] :σ , and from resolved shear stresses on an additional {1 1 0} plane with normal nα
1 . Thereare contributions from shear stresses on this additional slip plane both parallel to the slip
Dow
nloa
ded
by [
JH L
ibra
ries
] at
08:
21 0
4 A
ugus
t 201
6

Philosophical Magazine 107
Table 3. Values of the non-Schmid coefficients in Equation (32).
System a1 a2 a3
1 0.58 0.19 0.262 0.57 0.13 0.183 0.56 0.15 0.14
−30 −15 0 15 300
0.02
0.04
0.06
1 K
100 K
200 K
300 K
400 K
500 K600 K
Figure 6. Normalized values of CRSS τ αcr /C44 for the MD results for System 3. Dashed lines are fit
from Equation (22).
105
106
107
108
10−4
10−3
10−2
0K
300K
600K
Figure 7. Strain-rate dependence of τ αcr with applied loading at 0K, 300K, and 600K. Lines are a
guide to the eye.
direction, a1(mα ⊗ nα
1
) : σ , and perpendicular to the slip direction, a3[(
nα1 × mα
)⊗ nα1
] :σ . For m = (1 1 1), n = (1 0 1
), and n1 = (1 1 0
),
τ α = σ23 + a1
(−
√3
2σ13 + 1
2σ23
)+ a2σ12 + a3
[√3
4(σ22 − σ11) − 1
2σ12
](32)
Dow
nloa
ded
by [
JH L
ibra
ries
] at
08:
21 0
4 A
ugus
t 201
6

108 C. Alleman et al.
The values of the coefficients a1 − a3 in Equation (32) are fit to the entire MD dataensemble, with the value of τ α
cr for each temperature fit from Equation (22). The results ofthis fitting procedure are given in Table 3 for the three systems simulated. It is noted thatthe changes in the values of the parameters across the systems do not appear to indicatesignificantly different non-Schmid behaviours. As pertains to the finite element simulationsperformed in this study, all of the sets of parameter values in Table 3 produce effectiveSchmid factors with a maximum difference of 5% for all the load orientations studied.The parameter values obtained from System 3 are taken to be most representative of thenon-Schmid behaviour and are used in the finite element simulations presented in Section5. These parameters, along with the functional form in Equation (31), fully characterize theload-orientation effects of the atomic scale in the crystal plasticity framework when usedin Equation (5). The data for System 3 are shown in Figure 6.
4.3. Strain-rate dependence of the CRSS
To analyse the strain-rate dependence, a range of strain rates that are plausible within theshort timescale of MD simulations are applied at temperatures of 0.1K, 300K and 600Kfor System 1. The essentially stress-driven process by which slip occurs at 0.1K results ina critical stress value that is nearly identical to the result of a quasi-static loading at 0K.This low (zero) temperature behaviour is depicted as a constant value for the critical stressacross the entire range of strain rates in Figure 7. Values obtained for quasi-static loadingat 0K and the value obtained with a strain rate of 5 × 106s−1 agree to within 1%. Forfinite temperatures, where slip is a thermally activated process, strain rate affects the valueof the critical stress. The time taken for thermal activation is assumed to be a function oftemperature only, i.e. independent of strain rate. Also, higher strain rates produce highervalues of shear stress that will be developed over any given period of time. Thus, higherstrain rates will lead to higher values of CRSS. This trend is illustrated in Figure 7 for loadingat 300K and 600K. These results are in qualitative agreement with results for tungsten in[53].
The effect of strain rate on the CRSS is analysed in terms of a discrete probability ofslip occurring at each thermal fluctuation event in the lattice. The probability is based on theamount of thermal energy required to overcome the energetic barrier to slip. This perspectiveon the initiation of slip in dynamic deformation connects strain rate and temperature in thethermal activation process. The probability of a slip event B occurring on the m-th attackis approximated by the discrete product:
P (B ∈ [tm−1, tm]) = Pm
m−1∏j=1
(1 − Pj
)(33)
where [tm−1, tm] corresponds to the time interval of the m-th attack and Pi is the probabilityof success at the i-th attack. It is assumed that the probability of success does not changeappreciably over the duration of the discrete time increment from tm−1 to tm . The timeincrement is defined by the characteristic attack time, as derived below. The shear modulusμ1 (in GPa) is given as:
μ1 = 1
3(C11 − C12 + C44) = 65.23 − 0.0092 T (34)
Dow
nloa
ded
by [
JH L
ibra
ries
] at
08:
21 0
4 A
ugus
t 201
6

Philosophical Magazine 109
where T (K) is the absolute temperature. For the rest of the MD-based development, atemperature T = 0K is used for illustration. Finite temperature values are obtained bysubstituting the corresponding value of the shear modulus. The relevant transverse wavespeed and the corresponding frequency in Ta are, respectively, calculated as:
vs =√
μ1
ρ≈ 1.98 × 103 m
svD =
(3N
4πV
) 13
vs ≈ 4.69 × 1012s−1 (35)
The attack frequency is then calculated to be
v∗0 = vD
(b
l
)≈ 3.12 × 1011s−1 (36)
where the critical length l = Vact/b2 is approximated as 15b from discussions in [54].A similar value of 17b has been determined by Cuitiño and co-workers [55] using first-principles calculations involved in the development of the EAM force field [56]. Thecharacteristic attack time is
tA = 1
v∗0
≈ 3.20 × 10−12s (37)
The probability of success for an attack at a particular state of stress and temperature isexpressed as:
P(τ, T ) = exp
[−�Gk(τ )
kB T
](38)
Substituting the stress dependence of the activation energy in Equation (9) into Equation(38) yields:
P(τα
eff , T) = exp
{−�Gk0
kB T
[1 −
(τα
eff
τ0
)p]q}(39)
Finally, the probability of a slip event B occurring on the m-th attack in Equation (33)is given explicitly in terms of the applied stress and temperature as
P(τ α
cr ∈ (τm−1, τm]) =
m−1∏j=1
{1 − exp
[−�Gk0
kB T
[1 −
(τ j
τ0
)p]q] }
× exp
[−�Gk0
kB T
[1 −
(τm
τ0
)p]q](40)
The approximation to the stress τ j applied at step j is:
τ j = ταeff (t = j�t) = 1
�t
∫ t= j�t
t=( j−1)�t
∫ t=t
t=0τ α
eff
(t)
dtdt (41)
Here, the time tA in Equation (37) is used as �t = τm − τm−1. For subsequent analysis,the probability of a slip event in Equation (40) is approximated by a lognormal probabilitydistribution function as:
Dow
nloa
ded
by [
JH L
ibra
ries
] at
08:
21 0
4 A
ugus
t 201
6

110 C. Alleman et al.
0 0.02 0.04 0.060
1
Figure 8. Cumulative probability of slip initiation as a function of the resolved shear stress forloading at different strain rates and at a temperature of 300K.
f (X = x) = 1
x√
2 π βexp
[− (ln x − α)2
2 β2
](42)
where X = τref − τ and α and β are parameters of the distribution. The distributionparameters α and β can be calculated from sample estimates for the mean and varianceequations as:
α = lnμ2
X√σ 2
X + μ2
β =√
lnσ 2
X
μ2X
+ 1
(43)
In Figure 8, the cumulative probability of slip initiation is plotted as a function of theresolved shear stress for simulations carried out at 300K. The stress, which increases nearlylinearly in time according to Equation (18), determines the probability of slip. At stressesthat are relatively low for a given applied strain rate and system temperature, the probabilityof slip is near zero. This indicates that the system does not have enough thermal energy toovercome the Peierls barrier. Near the critical stress, the probability of slip increases in therange of stress where the energetic barrier to dislocation motion is commensurate with thethermal energy available to the system.
Lognormal distributions are fit to the MD simulation data at 300K and 600K such thatthe distribution means coincide with the simulation results. This is done by varying theparameters p and q to achieve suitable agreement. Results of the fitting procedure areplotted in Figure 9. As shown in the figure and seen in Table 4, the values of p and q arechanging slowly and appear to be converging asymptotically to the empirical values at lowstrain rates. This indicates that the model for stress dependence of the activation energy inEquation (9) is likely valid in this regime. At higher strain rates, the predicted values ofthe parameters diverge from their low strain-rate values with increasing strain rate. Thisindicates that the stress-dependence model for activation energy cannot be consistently
Dow
nloa
ded
by [
JH L
ibra
ries
] at
08:
21 0
4 A
ugus
t 201
6

Philosophical Magazine 111
Figure 9. Strain-rate effects on the values of the parameters p and q . Connecting lines are a guideto the eye. The dashed line represents the upper bound on the value of p and the lower bound on thevalue of q given in [25].
Table 4. Values of parameters p and q at various strain rates.
ε (s−1) p q
5 × 107 0.63 1.121 × 107 0.57 1.235 × 106 0.38 1.501 × 106 0.32 1.645 × 105 0.25 1.712 × 105 0.21 1.73
parametrized across all the strain rates studied. While the parameter values are within theranges of 0 < p < 1 and 1 < q < 2 derived in [25], the high rate results suggest significantchanges in the effective barrier shape that these values represent. This high rate behaviourcorresponds to a range of strain rates where significant changes are exhibited by the CRSS-temperature profiles due to the changing balance of stress and thermal activation of slip. Toaccount for the changing nature of the visco-plastic deformation, an additional strain-ratedependence needs to be accounted for in the model to accurately represent the very highstrain-rate behaviour.
5. Finite element implementation and simulations using the crystal plasticity model
The parametrized crystal plasticity model, developed in Sections 2 and 4, is implementedin an ABAQUS Explicit user-defined material subroutine (VUMAT). Functional formsand parameter values in the crystal plasticity model that are not related to non-Schmideffects are obtained from [20]. The complete set of crystal plasticity parameters is listedin Table 5. A value of 800 MPa for sα
0 is used for the simulations employing the non-Schmid formulation. This value is chosen so that the average yield stress in tension andcompression for the non-Schmid simulations equals the symmetric yield stress for the
Dow
nloa
ded
by [
JH L
ibra
ries
] at
08:
21 0
4 A
ugus
t 201
6

112 C. Alleman et al.
Table 5. Values of parameters used in the crystal plasticity model. The sα0 values of 550 MPa and
800 MPa are used in the simulations without and with non-Schmid effects, respectively.
Parameter Value
�Gk0 2.1 × 10−19Jsα0 550 MPa, 800 MPa
p 0.34q 1.66ρ 1.664 × 104kg/m3
cρ 150 J/kgKsαa0
50 MPar 1.4γ0 107s−1
ss0 125 MPahs0 300 MPaA 10−18Ja1 0.56a2 0.15a3 0.14
simulations employing the Schmid Law formulation. Dynamic simulations are carried outfor a 1 mm × 1 mm × mm cubic specimen of specified orientation, subjected to uniaxialtension and compression tests at 298 K. A constant logarithmic strain rate of 1s−1 is appliedby specifying a spatially uniform velocity boundary condition on the x3 = 0.5 mm face.Symmetry boundary conditions are applied on the x1 = 0, x2 = 0, x3 = 0 faces. Initialvelocities are prescribed on all nodes to avoid the introduction of stress waves and toapproximate the Poisson effects in the x1 and x2 directions. Slip is considered on the{0 1 1} [1 1 1] slip systems, alternatively with and without non-Schmid effects.
The effect of the non-Schmid formulation is analysed for loading in uniaxial tensionand compression. As seen in Figure 10(a), the stress–strain curves are identical in tensionand compression for [0 0 1] loading in the absence of non-Schmid effects. This symmetricbehaviour is quantified in Figure 10(b), where it is seen that the amount of accumulated slipis identical for tension and compression. In Figure 10(a), we can observe that including thenon-Schmid effects results in a significant tension–compression asymmetry, consistent withthe experimental results in [57,58] for specimen dimensions >∼ 1 µm and the analysis in[59]. In [21], an opposite trend has been found using dislocation dynamics (DD) simulationsof Ta. The authors of that study note that their simulation results represent the experimentalresults in [60]. They evaluated a parameter, which controlled the strength of the non-Schmideffect from the MD simulations in [43]. The non-Schmid formulation developed in the studyperformed here also reproduces the MD results in [43], correctly predicting the directionof the tension–compression asymmetries found for loading in all the directions presentedin [43]. Differences in the observed tension–compression asymmetry between the work in[21] and that reported here could be due to differences in boundary conditions and strainmagnitudes.
The tension–compression asymmetry in the [0 0 1] loading simulations is directly at-tributable to changes in the effective Schmid factor. In the absence of non-Schmid effects,
Dow
nloa
ded
by [
JH L
ibra
ries
] at
08:
21 0
4 A
ugus
t 201
6

Philosophical Magazine 113
0 0.01 0.02 0.03 0.040
100
200
300
400
Strain
Stre
ss [
MPa
]
Non−Schmid TNon−Schmid CSchmid TSchmid C
0 0.01 0.02 0.03 0.040
0.005
0.01
0.015
Strain
Acc
umul
ated
Slip
Non−Schmid TNon−Schmid CSchmid TSchmid C
(a) (b)
Figure 10. Material response for loading axis oriented along [0 0 1]: (a) stress–strain, (b) accumulatedslip on the primary slip system.
Figure 11. Yield stresses in tension and compression from simulations including non-Schmid effectsfor a range of loading orientations. Stresses are normalized by the yield stresses for each orientationfrom simulations employing the Schmid Law formulation. Lines are a guide to the eye.
all of the active slip systems have an identical Schmid factor of 0.41. With the non-Schmideffects, the Schmid factors for all of the active systems are 0.63 in tension and 0.37 incompression. This results in a delayed onset of plasticity for compressive loading. Thecorresponding change in the accumulation of slip on the active systems is shown in Figure10(b). The lower slip rate for the non-Schmid formulation observed in tension is due tothe lower stresses that are developed. The small increase in slip for compression in thenon-Schmid formulation versus the Schmid Law formulation is due to higher stresses thatare partially offset by the higher value of sα
0 used in the non-Schmid formulation.To study the impact of the non-Schmid effects on the asymmetry of yield, a number of
load cases are modelled. The orientation of the loading axis is varied to study the behaviourfor tension and compression along [0 0 1], [0 1 2], [0 1 1],
[1 2 2
],[1 1 1
]and
[1 1 2
]. A
comparison of the yield stresses at 0.5% strain obtained from each of the non-Schmidformulation simulations is presented in Figure 11. In the figure, the yield stress for eachorientation is normalized by the yield stress from the Schmid Law formulation simulationfor that orientation. From the figure, it is clear that the yield stress in compression is higherfor the [0 0 1] and [0 1 2] orientations, and the yield stress in tension is higher for the rest
Dow
nloa
ded
by [
JH L
ibra
ries
] at
08:
21 0
4 A
ugus
t 201
6

114 C. Alleman et al.
of the simulations. This is consistent with [57]. In comparison to the results in [9], there isagreement on the direction of the tension–compression asymmetry for the [0 1 1],
[1 2 2
]and
[1 1 1
]loading orientations, with yield in tension occurring at a higher stress than in
compression. For the [0 0 1] and [0 1 2] orientations, the current study predicts lower yieldstresses in tension, whereas in [9], the opposite trend is observed. Given that the results in[9] contradict those in [57] for the [0 0 1] orientation, it is argued that the difference could beexplained by heterogeneity in the experimental specimens and method of load application.Further experiments are necessary to investigate the source of the conflicting results.
6. Summary and conclusions
This study is focused on developing a methodology for creating a physical basis forfunctional parametric forms in crystal plasticity constitutive models for materials with aBCC lattice structure. This methodology is applied to develop a physically based modelfor tantalum. Specifically, the model identifies an effective measure of the critical stressrequired for thermally activated slip. The model accounts for the dependence of this effectivecritical resolved stress for slip initiation on temperature, strain rate and load orientation asobserved in atomistic simulations. It is therefore able to provide a direct link betweenrelevant atomistic processes and their crystal plasticity counterpart representations.
It is found that temperature effects are well characterized by the established functionalform in [25], where MD simulations have identified the values of the parameters. Thestrain-rate effects are explained through a probabilistic framework within which thermalactivation is modelled as a discrete process controlled by the frequency of thermal fluctuationand the probability associated with reaching the thermal activation energy required to movea dislocation. The load-orientation effects are quantified by parametrization of the effectsof non-glide stresses with reference to the general functional form in [51,52]. Analysis ofthe MD simulation results relates the relative magnitudes of non-glide stresses contributingto the effective resolved shear stress.
The new crystal plasticity model including non-Schmid effects is implemented in acommercial finite element code and simulations are conducted to validate the effectivenessof this model. The improved physics captured in this model produces realistic finite elementsimulations, consistent with experimental observations in [57] and in substantial agreementwith the results in [9] except where those observations contradict those in [57]. Specifi-cally, the orientation-dependent tension–compression asymmetry experimentally observedin BCC metals is reproduced by the new model.
AcknowledgementsThe authors gratefully acknowledge theAdvanced Simulations and Computing Program at LosAlamosNational Laboratory (Dr. M. Schraad, project leader) for support of this work. They also expressappreciation for fruitful discussions with Dr. I. Beyerlein of Los Alamos National Laboratory andProfessor V. Vitek of University of Pennsylvania.
References
[1] E. Schmid and W. Boas, Plasticity of Crystals: With Special Reference to Metals, F. A. Hughes,London, 1950.
[2] G.I. Taylor and C.F. Elam, Proc. R. Soc. London, Ser. A 112 (1926) p.337.
Dow
nloa
ded
by [
JH L
ibra
ries
] at
08:
21 0
4 A
ugus
t 201
6

Philosophical Magazine 115
[3] G.I. Taylor, Proc. R. Soc. London, Ser. A 118 (1928) p.1.[4] M.S. Duesberry and V. Vítek, Acta Mater. 46 (1998) p.1481.[5] J. Christian, Metall. Mater. Trans. A 14 (1983) p.1237. Available at http://dx.doi.org/10.1007/
BF02664806[6] G. Taylor, Prog. Mater Sci. 36 (1992) p.29. Available at http://www.sciencedirect.com/science/
article/pii/007964259290004Q[7] J.A. Shields, S.H. Goods, R. Gibala and T.E. Mitchell, Mater. Sci. Eng. 20 (1975) p.71. Available
at http://www.sciencedirect.com/science/article/pii/0025541675901329[8] J.F. Byron and D. Hull, J. Less-Common Met. 13 (1967) p.71. Available at http://www.
sciencedirect.com/science/article/pii/0022508867900483[9] J.F. Byron, J. Less-Common Met. 14 (1968) p.201. Available at http://www.sciencedirect.com/
science/article/pii/002250886890115X[10] R.T. Sato and A.K. Mukherjee, Mater. Sci. Eng. 8 (1971) p.74. Available at http://www.
sciencedirect.com/science/article/pii/002554167190084X[11] S.S. Lau, S. Ranji, A.K. Mukherjee, G. Thomas and J.E. Dorn, Acta Metall. 15 (1967) p.237.
Available at http://www.sciencedirect.com/science/article/pii/0001616067901976[12] V. Vítek, Phys. Status Solidi B 15 (1966) p.557. Available at http://dx.doi.org/10.1002/pssb.
19660150216[13] V. Vítek, Philos. Mag. 18 (1968) p.773. Available at http://www.tandfonline.com/doi/abs/10.
1080/14786436808227500[14] V.V. Vítek and F. Kroupa, Philos. Mag. 19 (1969) p.265. Available at http://www.tandfonline.
com/doi/abs/10.1080/14786436908217784[15] V. Vítek, R.C. Perrin and D.K. Bowen, Philos. Mag. 21 (1970) p.1049. Available at http://www.
tandfonline.com/doi/abs/10.1080/14786437008238490[16] M.S. Duesbery, V. Vítek and D.K. Bowen, Philos. Trans. R. Soc. London, Ser. A 332 (1973)
p.85. Available at http://www.jstor.org/stable/78267[17] A. Koester, A. Ma and A. Hartmaier, Acta Mater. 60 (2012) p.3894.[18] S. Chen and G. Gray, Metall. Mater. Trans. A 27 (1996) p.2994.[19] P.J. Maudlin, J.F. Bingert, J.W. House and S.R. Chen, Int. J. Plast. 15 (1999) p.139. Available at
http://www.sciencedirect.com/science/article/pii/S0749641998000588[20] C.A. Bronkhorst, B.L. Hansen, E.K. Cerreta and J.F. Bingert, J. Mech. Phys. Solids 55 (2007)
p.2351.[21] Z.Q. Wang and I.J. Beyerlein, Int. J. Plast. (2011). Available at http://www.sciencedirect.com/
science/article/pii/S0749641910001166[22] J.P. Hirth and J. Lothe, Theory of Dislocations, John Wiley & Sons, New York, 1982,[23] E.P. Busso and F.A. McClintock, Int. J. Plast. 12 (1996) p.1.[24] M. Kothari and L. Anand, J. Mech. Phys. Solids 46 (1997) p.51.[25] U.F. Kocks, A.S. Argon and M.F. Ashby, Thermodynamics and Kinetics of Slip, Pergamon Press,
New York, 1975,[26] A. Acharya and A.J. Beaudoin, J. Mech. Phys. Solids 48 (2000) p.2213. Available at http://www.
sciencedirect.com/science/article/pii/S0022509600000132[27] U.F. Kocks, J. Eng. Mater. Technol. 98 (1976) p.76.[28] S. Plimpton, J. Comput. Phys 117 (1995) p.1.[29] R.J. Arsenault, Acta Metall. 14 (1966) p.831.[30] G.J.Ackland and R.Thetford, Philos. Mag.A56 (1987) p.15.Available at http://www.tandfonline.
com/doi/abs/10.1080/01418618708204464[31] Y. Li, D.J. Siegel, J.B. Adams and X.Y. Liu, Phys. Rev. B 67 (2003) p.125101. Available at http://
link.aps.org/doi/10.1103/PhysRevB.67.125101[32] A.M. Guellil and J.B. Adams, J. Mater. Res. 7 (1992) p.639. Available at http://dx.doi.org/10.
1557/JMR.1992.0639
Dow
nloa
ded
by [
JH L
ibra
ries
] at
08:
21 0
4 A
ugus
t 201
6

116 C. Alleman et al.
[33] M.S. Daw and M.I. Baskes, Phys. Rev. Lett. 50 (1983) p.1285. Available at http://link.aps.org/doi/10.1103/PhysRevLett.50.1285
[34] C. Woodward and S.I. Rao, Philos. Mag. A 81 (2001) p.1305.[35] L.H. Yang, P. Söderlind and J.A. Moriarty, Philos. Mag. A 81 (2001) p.1355.[36] Y. Mishin and A.Y. Lozovoi, Acta Mater. 54 (2006) p.5013.[37] B.J. Lee, M.I. Baskes, H. Kim and Y.K. Cho, Phys. Rev. B 64 (2001) p.184102. Available at
http://link.aps.org/doi/10.1103/PhysRevB.64.184102[38] M. Mrovec, V. Vitek, D. Nguyen-Manh, D.G. Pettifor, L.G. Wang and M. Sob, MRS Proc. 578
(1999) p.199.[39] A. Jiang, T.A. Tyson and L. Axe, J. Phys. Condens. Matter 17 (2005) p.6111.[40] A.J. Detor, Phys. Rev. B 78 (2008) p.144113.[41] J. Marian, J. Knap and G.H. Campbell, Acta Mater. 56 (2008) p.2389.[42] J. Mei, Y. Ni and J. Li, Int. J. Solids Struct. 48 (2011) p.3054. Available at http://www.
sciencedirect.com/science/article/pii/S0020768311002393[43] K. Ito and V. Vitek, Philos. Mag. A 81 (2001) p.1387.[44] G. Simmons and H. Wang, Single Crystal Elastic Constants and Calculated Aggregate
Properties: A Handbook, The MIT Press, Cambridge, MA, 1971.[45] R.A. Johnson and D.J. Oh, J. Mater. Res. 4 (1989) p.1195.[46] S. Takeuchi and K. Maeda,Acta Metall. 25 (1977) p.1485.Available at http://www.sciencedirect.
com/science/article/pii/0001616077900785[47] R. Gröger and V. Vitek, Acta Mater. 56 (2008) p.5426. Available at http://www.sciencedirect.
com/science/article/pii/S1359645408005156[48] L.H. Yang and J.A. Moriarty, Mater. Sci. Eng. A 319–321 (2001) p.124. Available at http://www.
sciencedirect.com/science/article/pii/S0921509301010206[49] Q. Qin and J.L. Bassani, J. Mech. Phys. Solids 40 (1992) p.813.[50] Q. Qin and J.L. Bassani, J. Mech. Phys. Solids 40 (1992) p.835.[51] R. Gröger. Development of physically based plastic flow rules for body-centered cubic metals
with temperature and strain rate dependencies, PhD thesis, University of Pennsylvania, 2007.[52] R. Gröger, V. Racherla, J.L. Bassani and V. Vitek, Acta Materialia 56 (2008) p.5412. Available
at http://www.sciencedirect.com/science/article/pii/S1359645408005144[53] D. Brunner and V. Glebovsky, Mater. Lett. 44 (2000) p.144.[54] M. Tang, L.P. Kubin and G.R. Canova, Acta Mater. 46 (1998) p.3221. Available at http://www.
sciencedirect.com/science/article/pii/S1359645498000068[55] A.M. Cuitiño, L. Stainier, G. Wang, A. Strachan, T. Çagin, W.A. Goddard III and M. Ortiz, J.
Comput.-Aided Mater. 8 (2001) p.127.[56] A. Strachan, T. Çagin, O. Gülseren, S. Mukherjee, R.E. Cohen and W.A. Goddard III, Modell.
Simul. Mater. Sci. Eng. 12 (2004) p.445.[57] P.J. Sherwood, F. Guiu, H.C. Kim and P.L. Pratt, Can. J. Phys. 45 (1967) p.1075. Available at
http://www.nrcresearchpress.com/doi/abs/10.1139/p67-079[58] J.Y. Kim, D. Jang and J.R. Greer, Acta Mater. 58 (2010) p.2355. Available at http://www.
sciencedirect.com/science/article/pii/S1359645409008647[59] C.H. Lu, B.A. Remington, B.R. Maddox, B. Kad, H.S. Park, S.T. Prisbrey and M.A. Meyers,
Acta Materialia 60 (2012) p.6601. Available at http://www.sciencedirect.com/science/article/pii/S1359645412005551
[60] D. Hull, J.F. Byron and F.W. Noble, Can. J. Phys. 45 (1967) p.1091.
Dow
nloa
ded
by [
JH L
ibra
ries
] at
08:
21 0
4 A
ugus
t 201
6