Embed Size (px)
Citation preview
HAL Id: tel-00715651https://tel.archives-ouvertes.fr/tel-00715651
Submitted on 9 Jul 2012
HAL is a multi-disciplinary open accessarchive for the deposit and dissemination of sci-entific research documents, whether they are pub-lished or not. The documents may come fromteaching and research institutions in France orabroad, or from public or private research centers.
L’archive ouverte pluridisciplinaire HAL, estdestinée au dépôt et à la diffusion de documentsscientifiques de niveau recherche, publiés ou non,émanant des établissements d’enseignement et derecherche français ou étrangers, des laboratoirespublics ou privés.
Estimation de l’état pour la surveillance des systèmes degrandes dimensions. Application aux réseaux électriques
Assem Thabet
To cite this version:Assem Thabet. Estimation de l’état pour la surveillance des systèmes de grandes dimensions. Ap-plication aux réseaux électriques. Automatique / Robotique. Ecole Nationale d’Ingénieurs de Gabès,2012. Français. tel-00715651
THESE
Présentée à
de l’Ecole Nationale Des Ingénieurs de Gabés
en vue d’obtention de
DOCTORAT
en génie électrique par
ASSEM THABET
Estimation de l’état pour la surveillance des systèmesde grandes dimensions. Application aux réseaux
électriques.
Soutenue le 14 Mars 2012 devant le jury composé de
Ridha BENABDENNOUR (Professeur, Université de Gabès) Président
Lasâad SBITA (Maître de Conférence, Université de Gabès) Rapporteurs
Moez FEKI (Maître de Conférence, Université de Sousse)
Mohamed BOUTAYEB (Professeur, Université de Nancy) Examinateur
M.N ABDELKRIM (Professeur, Université de Gabès) Examinateur
Gaetan DIDIER (Maître de Conférence, Université de Nancy) Examinateur

ii
DEDICACES
En témoignage d’amour et d’affection
Je dédie ce travail
A mes parents
En signe de reconnaissance pour leurs sacrifices
A mes frères et ma fiancée Aicha
En connaissance de leur soutien moral continu
Et à tous mes amis
qu’ils trouvent dans ce travail le témoignage d’amour sincère, d’une estime profonde et
d’une reconnaissance éternelle.
REMERCIEMENTS
Les travaux de recherche présentés dans ce mémoire ont été menés à l’unité de Re-
cherche Modélisation, Analyses et Commande des Systèmes (MACS) dirigée par Mon-
sieur le Professeur Mohamed Naceur ABDELKRIM que je remercie pour la confiance
qu’il m’a témoigné en m’accueillant dans son équipe de recherche.
Je tiens à remercier les membres du jury de thèse :
Monsieur Ridha BENABDENNOUR, Professeur à l’Université de Gabés et Directeur
de l’unité de recherche CONPRI, d’avoir accepté de présider ce jury de thèse.
Monsieur Lasâad SBITA, Maître de Conférences à l’Université de Gabès, et Mon-
sieur Moez FKIH, Maître de Conférences à l’Université de Sousse, pour avoir accepté
de juger et d’enrichir ce travail en tant que rapporteurs.
Toute ma reconnaissance et ma gratitude vont à mes directeurs de thèse :
Monsieur Mohamed BOUTAYEB, Professeur à l’université de Nancy, et Monsieur Gae-
tan DIDIER, Maître de Conférences à l’Université de Nancy, pour avoir diriger cette
thèse et surtout cette thématique passionnante. La pertinence de leurs remarques, de
leurs conseils, des échanges que nous avons pu avoir, a éclairé mon chemin durant ces
trois ans de thèse. Je les remercies également pour leurs grandes qualités humaines.
Monsieur Mohamed Naceur ABDELKRIM, professeur à l’Université de Gabés, et Mon-
sieur Said CHNIBA, Maître Assistant à l’Université de Gabès, pour avoir encadré ce tra-
vail de thèse. Je les remercies entre autres pour toute la rigueur qu’ils ont apporté, pour
leurs conseils, pour l’enthousiasme insatiable dont ils font preuve pour la recherche.
Je remercie l’ensemble de mes collègues au MACS et à l’Institut Supérieur des Sys-
tèmes Industriels de Gabés (ISSIG), surtout : Rym, Ahmed, Anis, Messaoud, Habib,
Monia, Asma, Majdi, Abdalah, .. pour leur soutien et leurs conseils. Je n’oublie pas
mes amis à l’équipe de Longwy, notamment Lama, Mohamed, Ali, Arnaud, Bertrand,

v
Adrien, Asma, Zarrougui et Ibrahima...pour leur soutien et leurs conseils. Je remercie
particulièrement Monsieur Kamel ABDERAHIM, Michel ZASADZINSKI et Hugues
RAFARALAHY pour leurs aides.
Une dernière pensée émue pour ma famille, en particulier mes parents qui me vouent une
confiance inconditionnelle et qui m’ont toujours soutenus dans mes projets. Mes derniers
mots iront à mes fréres Khaled et Touhami et ma fiancée Aicha qui m’ont accompagné
pendant cette thèse.
TABLE DES MATIÈRES
REMERCIEMENTS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iv
TABLE DES MATIÈRES . . . . . . . . . . . . . . . . . . . . . . . . . . . . vi
LISTE DES TABLEAUX . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ix
LISTE DES FIGURES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . x
LISTE DES ANNEXES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xiii
1 : CHAPITRE 1 : LES ASPECTS STATIQUESET DYNAMIQUES DANS LES RÉSEAUXÉLECTRIQUES . . . . . . . . . . . . . . . . . . . 1
1.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Modélisation des élements constituants le réseau . . . . . . . . . . . . 1
1.2.1 Modèle de la ligne . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2.2 Modèle du transformateur . . . . . . . . . . . . . . . . . . . . 3
1.3 Matrice d’admittance nodale . . . . . . . . . . . . . . . . . . . . . . . 5
1.4 Aspect Statique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.4.1 Notion de flux de puissance . . . . . . . . . . . . . . . . . . . 6
1.4.2 Notion d’estimation d’état . . . . . . . . . . . . . . . . . . . . 14
1.5 Mode Dynamique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
1.5.1 Modèle A . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
1.5.2 Modèle B . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
1.5.3 Modèle C . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
1.5.4 Diagramme de simulation dynamique . . . . . . . . . . . . . . 30
1.5.5 Exemple de simulation . . . . . . . . . . . . . . . . . . . . . . 31
1.6 Analyse de Stabilité . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
1.6.1 Stabilité des méthodes de calcul de flux de puissance . . . . . . 34
vii
1.6.2 Stabilité des méthodes d’estimation d’état . . . . . . . . . . . . 35
1.6.3 Exemple d’application . . . . . . . . . . . . . . . . . . . . . . 35
1.7 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
2 : CHAPITRE 2 : ÉTAT DE L’ART SUR LESOBSERVATEURS D’ÉTAT NON LINÉAIRES 38
2.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
2.2 Observabilité des systèmes non linéaires . . . . . . . . . . . . . . . . . 38
2.2.1 Cas des systèmes continus . . . . . . . . . . . . . . . . . . . . 39
2.2.2 Cas des systèmes discrets . . . . . . . . . . . . . . . . . . . . . 41
2.3 Estimation d’état : les différents types d’observateurs . . . . . . . . . . 43
2.3.1 Filtre de Kalman Etendu . . . . . . . . . . . . . . . . . . . . . 44
2.3.2 Observateur de Thau . . . . . . . . . . . . . . . . . . . . . . . 45
2.3.3 Observateur sous forme canonique . . . . . . . . . . . . . . . . 48
2.3.4 Observateur à Grand Gain . . . . . . . . . . . . . . . . . . . . 51
2.3.5 Observateur à entrée inconnue . . . . . . . . . . . . . . . . . . 58
2.3.6 Approche LMI . . . . . . . . . . . . . . . . . . . . . . . . . . 60
2.4 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
3 : CHAPITRE 3 : ESTIMATION D’ÉTATET DIAGNOSTIC DES RÉSEAUX ÉLEC-TRIQUES HT . . . . . . . . . . . . . . . . . . . . . 65
3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
3.2 Modélisation dynamique du réseau . . . . . . . . . . . . . . . . . . . . 65
3.2.1 Transformation du modèle dynamique du réseau . . . . . . . . 65
3.2.2 Résultats de simulation du modèle dynamique . . . . . . . . . . 68
3.3 Synthèse de Filtre pour l’estimation d’état dynamique des réseaux élec-
triques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
3.3.1 Estimateur de Kalman Etendu (E.K.E) . . . . . . . . . . . . . . 74
3.3.2 Filtre de Kalman Etendu avec fenêtre de mesure glissante (F.K.E-
MH) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
viii
3.3.3 Analyse de la convergence . . . . . . . . . . . . . . . . . . . . 79
3.3.4 Résultats de Simulation pour l’estimation d’état . . . . . . . . . 83
3.4 Diagnostic des réseaux électriques . . . . . . . . . . . . . . . . . . . . 92
3.4.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
3.4.2 Méthodes de Diagnostic . . . . . . . . . . . . . . . . . . . . . 92
3.4.3 Résultats de Simulation pour la détection des défauts . . . . . . 95
3.4.4 Localisation et Estimation des défauts dans les réseaux électriques100
3.5 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
4 : CHAPITRE 4 : APPLICATION SUR UNRÉSEAU TEST 5 NOEUDS . . . . . . . . . . 120
4.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
4.2 Présentation du réseau . . . . . . . . . . . . . . . . . . . . . . . . . . 120
4.3 Modèle dynamique du réseau . . . . . . . . . . . . . . . . . . . . . . . 121
4.4 Estimation d’état . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
4.5 Détection, Localisation et Estimation des défauts . . . . . . . . . . . . 127
4.5.1 Détection et Localisation . . . . . . . . . . . . . . . . . . . . . 127
4.5.2 Estimation des défauts . . . . . . . . . . . . . . . . . . . . . . 131
4.6 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133
BIBLIOGRAPHIE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
Annexe 147
I.1 Réseau test 3 noeuds . . . . . . . . . . . . . . . . . . . . . . . . . . . xviii
I.2 Réseau test 13 noeuds . . . . . . . . . . . . . . . . . . . . . . . . . . . xix
RÉSUMÉ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xxi
LISTE DES TABLEAUX
1.I Type des noeuds dans un réseau électrique . . . . . . . . . . . . . 7
1.II Comparaison des Performances des méthodes d’estimation d’état 25
1.III Valeurs des grandeurs σ , d et g des phases et leur influence sur les
tensions nodales . . . . . . . . . . . . . . . . . . . . . . . . . . 36
1.IV Valeurs des grandeurs σ , d et g des tensions et leur influence sur
les phases . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
1.V Valeurs des grandeurs σ , d et g des tensions nodales et des phases
estimées . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.I erreur relative (%) et temps de calcul . . . . . . . . . . . . . . . . 72
3.II erreur relative (%) et temps de calcul avec des valeurs initiales
aléatoires . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
3.III convergence (%) avec des valeurs initiales aléatoires . . . . . . . 91
3.IV Erreur relative (%) avec valeurs initiales aléatoires . . . . . . . . 92
3.V Taux (%) de détection des défauts . . . . . . . . . . . . . . . . . 99
3.VI convergence (%) avec des valeurs initiales aléatoires . . . . . . . 107
3.VII erreur relative (%) avec variation aléatoire de l’état initial . . . . . 118
4.I Caractéristiques des liaisons électriques entre noeuds . . . . . . . 121
4.II Caractéristiques des Puissances et des Tensions des noeuds . . . . 121
I.I Tableau de Puissances . . . . . . . . . . . . . . . . . . . . . . . xx
I.II Données des Lignes . . . . . . . . . . . . . . . . . . . . . . . . xx
LISTE DES FIGURES
1.1 Topologies des réseaux électriques . . . . . . . . . . . . . . . . . 2
1.2 Modèle en π d’une ligne électrique . . . . . . . . . . . . . . . . 3
1.3 Schéma équivalent d’un transformateur : Modèle en π . . . . . . 4
1.4 Calcul de V2 (KV) . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.5 Calcul de ∆P2 (MW) . . . . . . . . . . . . . . . . . . . . . . . . 12
1.6 Calcul de ∆Q2 (MVAR) . . . . . . . . . . . . . . . . . . . . . . 13
1.7 Variation du temps de calcul (s) . . . . . . . . . . . . . . . . . . 13
1.8 Evolution de V1 avec AMC, MLS et FDE . . . . . . . . . . . . . 23
1.9 Evolution de V1 avec MS2 (nMS2 = 1,4) . . . . . . . . . . . . . . 24
1.10 Schéma de principe du diagramme de simulation dynamique . . . 31
1.11 Réseau test 5 noeuds . . . . . . . . . . . . . . . . . . . . . . . . 31
1.12 Evolution de l’angle de rotation mécanique δ2 au noeud généra-
teur 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
1.13 Variation de la tension nodale V3 au noeud charge 3 . . . . . . . . 33
1.14 Variation de l’écart de puissance active au noeud charge 3 ∆P3 . . 33
2.1 Evolution de la sortie y = sin(x) . . . . . . . . . . . . . . . . . . 47
2.2 Diagramme fonctionnel d’un observateur à grand gain . . . . . . 52
3.1 Evolution de det(gxa) en OM et DM . . . . . . . . . . . . . . . . 70
3.2 Evolution de la vitesse angulaire mécanique du noeud générateur
3 (x2(k)) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
3.3 Evolution de la tension nodale au noeud charge 2 (x4(k)) . . . . . 71
3.4 Evolution de la tension au noeud 1 :V1(k) . . . . . . . . . . . . . 73
3.5 Evolution du rang de la matrice d’observabilité : rang(O(k−4,k)3noeuds) . 83
3.6 Evolution de l’erreur d’estimation . . . . . . . . . . . . . . . . . 84
3.7 Evolution de la tension nodale estimée au noeud 2 : V2(k) = x4(k) 85
3.8 Evolution de ω3(k) = x2(k) au noeud 3 . . . . . . . . . . . . . . 85
3.9 Evolution de la tension nodale estimée au noeud 2 : V2(k) = x4(k) 86
xi
3.10 Evolution du rang de la matrice d’observabilité : rang(O(k−13,k)13noeuds) 87
3.11 Evolution de (V1(k)−V1relle(k)) avec OM et DM . . . . . . . . . 88
3.12 Evolution de T1 and T2 +T3 dans OM . . . . . . . . . . . . . . . 89
3.13 Variation de ‖xrel − x‖ avec OM . . . . . . . . . . . . . . . . . . 90
3.14 Variation de ‖xrel − x‖ avec DM . . . . . . . . . . . . . . . . . . 91
3.15 Evolution de V2(k) . . . . . . . . . . . . . . . . . . . . . . . . . 96
3.16 Evolution de V2(k) . . . . . . . . . . . . . . . . . . . . . . . . . 97
3.17 Variation de residu rk . . . . . . . . . . . . . . . . . . . . . . . . 97
3.18 Variation de résidu rk . . . . . . . . . . . . . . . . . . . . . . . . 98
3.19 Schéma de principe de FDI . . . . . . . . . . . . . . . . . . . . . 104
3.20 Evolution de r(k) par le F.K.E-MH . . . . . . . . . . . . . . . . 108
3.21 Evolution des résidus par les U.I.E.K.Fs . . . . . . . . . . . . . 108
3.22 Evolution de r(k) par le F.K.E-MH . . . . . . . . . . . . . . . . 109
3.23 Evolution des résidus par les U.I.E.K.Fs . . . . . . . . . . . . . 109
3.24 Evolution de r(k) par E.K.F-MH . . . . . . . . . . . . . . . . . 110
3.25 Evolution des résidus par U.I.E.K.Fs . . . . . . . . . . . . . . . 110
3.26 Evolution de r(k) par le F.K.E-MH . . . . . . . . . . . . . . . . 111
3.27 Evolution des résidus par les U.I.E.K.Fs . . . . . . . . . . . . . 111
3.28 Evolution du rang de la matrice d’observabilité : rang(O(k−4,k)3noeuds) . 114
3.29 Evolution de ‖xrel − xa‖ avec l’E.K.F . . . . . . . . . . . . . . . 115
3.30 Evolution de ‖xrel − xa‖ avec le F.K.E-MH . . . . . . . . . . . . 115
3.31 Evolution de χ(k) (cas 1) . . . . . . . . . . . . . . . . . . . . . . 116
3.32 Evolution de χ(k) (cas 2) . . . . . . . . . . . . . . . . . . . . . 117
3.33 Evolution de χ(k) (cas 3) . . . . . . . . . . . . . . . . . . . . . 118
4.1 Réseau Test 5 Noeuds . . . . . . . . . . . . . . . . . . . . . . . 120
4.2 Schéma Simulink du réseau test 5 noeuds . . . . . . . . . . . . . 123
4.3 Evolution de la puisance de sortie estimée (P2,3 avec OM et DM) . 124
4.4 Evolution de P2,3 utilisant les modèles OM et DM . . . . . . . . 125
4.5 Evolution de l’erreur d’estimation . . . . . . . . . . . . . . . . . 125
xii
4.6 Evolution de θ4 . . . . . . . . . . . . . . . . . . . . . . . . . . 126
4.7 Evolution des residus générés par le F.K.E, l’E.K.E et le F.K.E-
M.H . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128
4.8 Evolution du residu généré par le F.K.E-M.H (1er défaut) . . . . 129
4.9 Evolution des résidus générés par les U.I.E.K.Fs . . . . . . . . . 130
4.10 Evolution du résidu généré par le F.K.E-M.H . . . . . . . . . . . 130
4.11 Evolution des résidus générés par les U.I.E.K.Fs . . . . . . . . . 131
4.12 Evolution de χ(k) générés par l’E.K.E et le F.K.E-MH . . . . . . 132
4.13 Evolution de χ(k) généré par le F.K.E-MH . . . . . . . . . . . . 133
I.1 Schéma du réseau test 3 noeuds . . . . . . . . . . . . . . . . . . xviii
I.2 Schéma du réseau test 13 noeuds . . . . . . . . . . . . . . . . . . xix
LISTE DES ANNEXES
I : Annexe 1 . . . . . . . . . . . . . . . . . . . . . . . . . . .xviii
LISTE DES ACRONYMES
FP Flux de puissance (en anglais Load Flow)
OLF Optimal Load Flow (Flux de puissance Optimale)
PL Programmation Linéaire
DAE Equations Algébro-Différentielles
ODE Equations Différentielles Ordinaires
LMI Inégalité Matricielle Linéaire
OM Modéle Ordinaire
DM Modéle Découplé
F.K.E Filtre de Kalman Etendu
E.K.E Estimateur de Kalman Etendu
F.K.E-MH Filtre de Kalman Etendu avec fenêtre de mesures glissante
U.I.E.K.F Filtre de Kalman Etendu à entrées inconnues
U.I.K.F Filtre de Kalman à entrées inconnues
INTRODUCTION
En automatique moderne, l’analyse et le contrôle/diagnostic/surveillance/commande
du comportement dynamique d’un procédé réel sont souvent fondés sur l’utilisation de
modèles de nature non linéaire. La non linéarité est due soit à la complexité des phéno-
mènes décrits, soit à la nature des bouclages utilisés. En effet, et même si on se contente
d’un modèle linéaire, le respect de certaines contraintes pratiques (saturation, hystéré-
sis,...) mène à des systèmes bouclés qui sont non linéaires. Actuellement, dans la lit-
térature, plusieurs classes de systèmes ont été étudiées : les systèmes bilinéaires, les
systèmes à paramètres variant par rapport au temps(LPV), les systèmes homogènes, etc.
Après la phase de modélisation/identification, l’étape d’estimation de l’état du système
est fondamentale pour le diagnostic et la surveillance. En effet, l’état du système n’est
pas toujours complètement accessible et ceci est dû essentiellement à deux raisons.
D’une part, en raison des contraintes technologiques, dont on ne dispose pas toujours de
capteurs pour mesurer certaines grandeurs physiques. D’autre part, pour des contraintes
économiques, dont on cherche à minimiser le coût en s’affranchissant de certains cap-
teurs. L’estimation de la partie non mesurée de l’état s’effectue à travers un observateur.
Au cours des dernières décennies, le problème de la synthèse des observateurs a suscité
l’intérêt de beaucoup de chercheurs et a fait l’objet d’un grand nombre de travaux. La
synthèse des observateurs dépend essentiellement de la classe de systèmes considérée
(systèmes bilinéaires, systèmes singuliers, LPV,etc.) et du type de l’observateur (obser-
vateurs d’ordre plein, observateurs fonctionnels, filtre de Kalman, etc.) selon l’objectif
recherché.
Ce travail de thèse est une contribution au problème d’estimation d’état et de diag-
nostic des systèmes complexes qui se traduit par les réseaux électriques et par suite la
synthèse d’observateurs ou filtre dont l’objectif est double : théorique et applicatif.
En effet, malgré une littérature abondante concernant la théorie de l’estimation linéaire,
on trouve peu de résultats concernant les systèmes non linéaires de grandes dimensions.
Ces derniers, à travers des problématiques telles que l’analyse et la synthèse des ré-
xvi
seaux de communication, des réseaux électriques, des réseaux de transports de matière
ou des systèmes énergétiques, sont devenues une préoccupation majeure et un des axes
de recherche les plus explorés. Un des objectifs de ce travail est de faire la modélisa-
tion, l’analyse et la synthèse d’estimateurs d’état afin de surveiller le comportement des
réseaux électriques. En effet, il est très difficile, voir impossible, (pour des raisons d’ac-
cessibilité, techniques et/ou de coût) de mesurer le nombre excessif des variables d’état
dans un système de grandes dimensions. Il est donc important de développer des cap-
teurs logiciels pouvant produire une estimation fiable des variables nécessaires pour le
diagnostic mais également pour la commande.
Premièrement, nous proposons des généralisations de certains résultats, à caractère
théorique, de la littérature de deux aspects fondamentaux d’un réseau électrique : sta-
tique / algébriques (flux de puissance et estimation d’état) et celui dynamique, tout en
établissant dans un premier temps des extensions et des modifications des méthodes uti-
lisées, en se basant sur la minimisation de temps de calcul, et dans un deuxième temps
un nouveau modèle dynamique se basant sur les techniques de transformations des sys-
tèmes algébro-différentiels non linéaires à des systèmes d’équations différentielles non
linéaires ordinaire en vérifiant la propriété d’index 1.
Deuxièmement, et en se basant sur les résultats à caractère théorique, nous déve-
loppons des nouvelles techniques de filtrage pour estimer les différentes grandeurs phy-
siques du réseau électriques en vue du diagnostic ou de la commande. Il s’agit en particu-
lier de diagnostiquer, localiser géographiquement et estimer quelques défauts critiques ;
tel que le court-circuit, perte de puissance d’alternateur et la coupure des lignes de trans-
port et qui sont des sources de dysfonctionnement pour le réseau avec une application
pour la validation des techniques développées.
Notre travail est organisé de la façon suivante :
Dans le premier chapitre, on aborde le problème de modélisation des réseaux élec-
triques. On présente les deux aspects de base des réseaux : Statique et Dynamique. La
notion Statique (ou algébrique) se base sur deux problématiques, qui sont le calcul de
xvii
répartition de charges (ou load flow) et l’estimation d’état statique. L’aspect dynamique
se base sur une modélisation à travers les équations algébro-différentielles non linéaires
tout en validant les méthodes et les techniques déjà utilisées ainsi que des versions mo-
difiées qu’on a développées.
Le chapitre 2 introduit le problème d’estimation d’état et donne par suite un état de
l’art sur l’estimation d’état des systèmes non-linéaires suivant une représentation d’état
spécifiques. Ainsi, des méthodes concernant l’observabilité des systèmes non-linéaires
sont exposées.
Le chapitre 3 est dédié à adopter un modèle dynamique proposé des réseaux élec-
triques en se basant sur des techniques des transformations et principalement la propriété
d’index 1. Par suite la synthèse d’un filtre pour l’estimation d’état, et dans ce sens nous
présentons un nouveau filtre de kalman en se basant sur l’ajout d’une fenêtre des mesures
glissante pour la détection et l’estimation avec une autre version à entrées inconnues pour
la localisation géographique des défauts tout en étudiant la convergence et la stabilité lo-
cale.
Dans le chapitre 4, on propose une application des méthodes, techniques et al-
gorithmes développés sur un réseau Test 5 noeuds tout en utilisant l’environnement
Simulink et la bibliothèque SimPowerSystems de MAT LABr pour prouver la faisabi-
lité des méthodes étudiées pour une application temps réel en utilisant surtout les cartes
DSP.
1
CHAPITRE 1 : LES ASPECTS STATIQUES ETDYNAMIQUES DANS LES RÉSEAUX ÉLECTRIQUES
1.1 Introduction
Certains auteurs qualifient le réseau électrique comme étant le circuit le plus grand ja-
mais inventé par l’homme. Un circuit dont les éléments (centrales, lignes,...jusqu’aux ap-
pareils les plus élémentaires de consommation d’énergie électrique) se situent et s’étendent
à l’échelle de continents entiers [1]. C’est cette étendue, en effet, qui pose la difficulté de
pouvoir prévoir le comportement et étudier le fonctionnement d’une machine aussi gi-
gantesque et comment l’exploiter dans les conditions les plus optimales ? C’est pourquoi
il est vite apparu indispensable de développer des modèles du système en question. Mo-
dèles nécessairement réduit qui soient fidèles au comportement, statique et dynamique,
du réseau réel afin de permettre son étude et son exploitation.
Dans ce chapitre, on présente, en effet, ces deux aspects. On donnera un aperçu sur le
calcul de répartition de charge et l’estimation d’état pour le comportement statique et
un aperçu sur la modélisation sous forme des équations algébro-différentielles pour le
comportement dynamique du réseau. La formulation de ces aspects en modèles mathé-
matiques permet leur compréhension et leur résolution d’une façon simple. Il est évident
que ces aspects dépendent du modèle global établi qui, lui même, dépend du modèle
élémentaire de chaque élément constituant le réseau.
1.2 Modélisation des élements constituants le réseau
Dans ce paragraphe on se limite à la présentation du modèle de la ligne et du trans-
formateur car ces sont les éléments essentiels du réseau et qui posent le plus de difficulté.
En effet, c’est eux qui assurent la liaison de tous les éléments du réseau et par lesquels
transite la totalité de l’énergie électrique.
Cette modélisation, souvent prise en fonctionnement triphasé symétrique, repose sur plu-
2
sieurs hypothèses :
• Tous les éléments sont triphasés et équilibrés.
• Les influences entre les différents éléments ne sont pas prises en compte.
Ainsi le modèle du réseau triphasé se réduit à un modèle monophasé équivalent. Les
lignes électriques sont représentées par des quadripôles équivalents à constantes concen-
trées. Les transformateurs du réseau sont modélisés par leur schéma équivalent mono-
phasé.
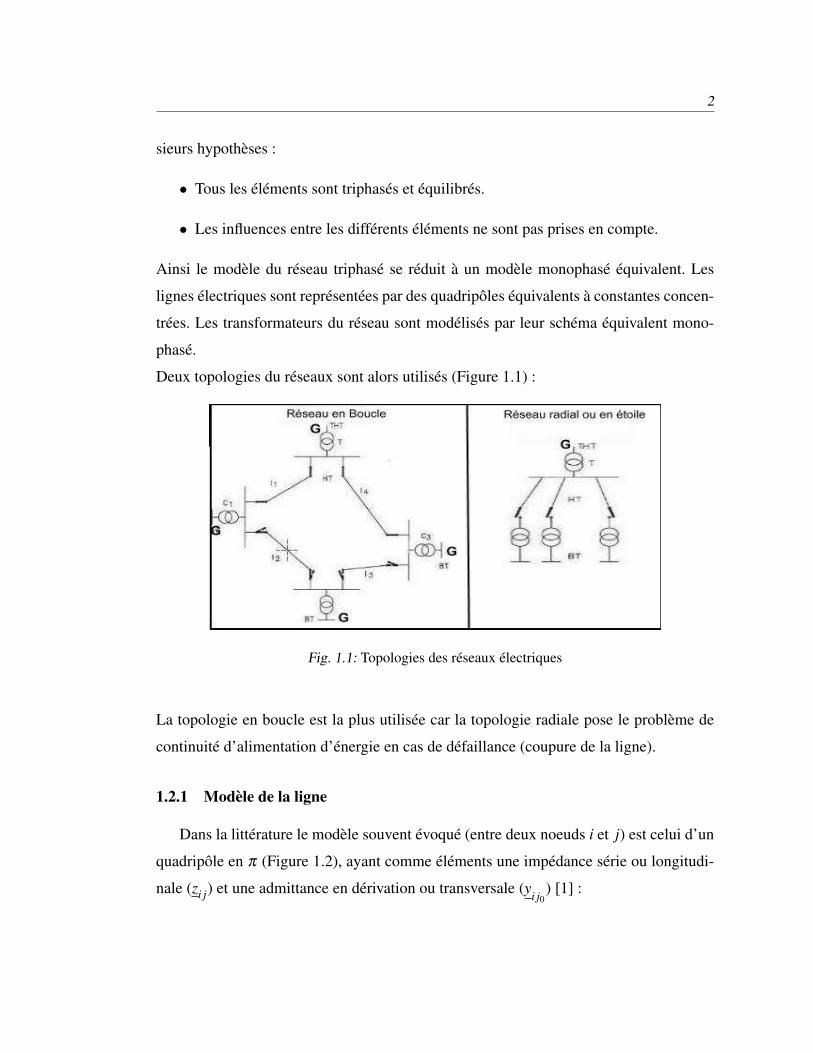
Deux topologies du réseaux sont alors utilisés (Figure 1.1) :
Fig. 1.1: Topologies des réseaux électriques
La topologie en boucle est la plus utilisée car la topologie radiale pose le problème de
continuité d’alimentation d’énergie en cas de défaillance (coupure de la ligne).
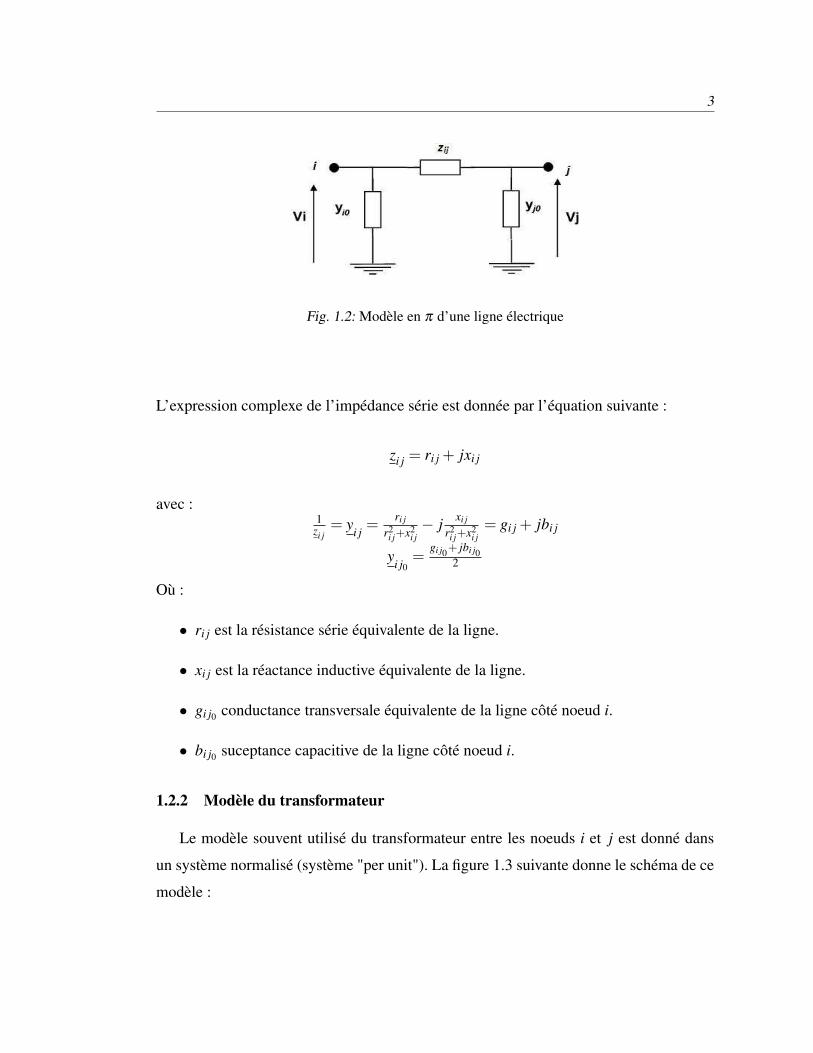
1.2.1 Modèle de la ligne
Dans la littérature le modèle souvent évoqué (entre deux noeuds i et j) est celui d’un
quadripôle en π (Figure 1.2), ayant comme éléments une impédance série ou longitudi-
nale (zi j) et une admittance en dérivation ou transversale (yi j0
) [1] :
3
Fig. 1.2: Modèle en π d’une ligne électrique
L’expression complexe de l’impédance série est donnée par l’équation suivante :
zi j = ri j + jxi j
avec :1
zi j= y
i j=
ri j
r2i j+x2
i j
− jxi j
r2i j+x2
i j
= gi j + jbi j
yi j0
=gi j0
+ jbi j0
2
Où :
• ri j est la résistance série équivalente de la ligne.
• xi j est la réactance inductive équivalente de la ligne.
• gi j0 conductance transversale équivalente de la ligne côté noeud i.
• bi j0 suceptance capacitive de la ligne côté noeud i.
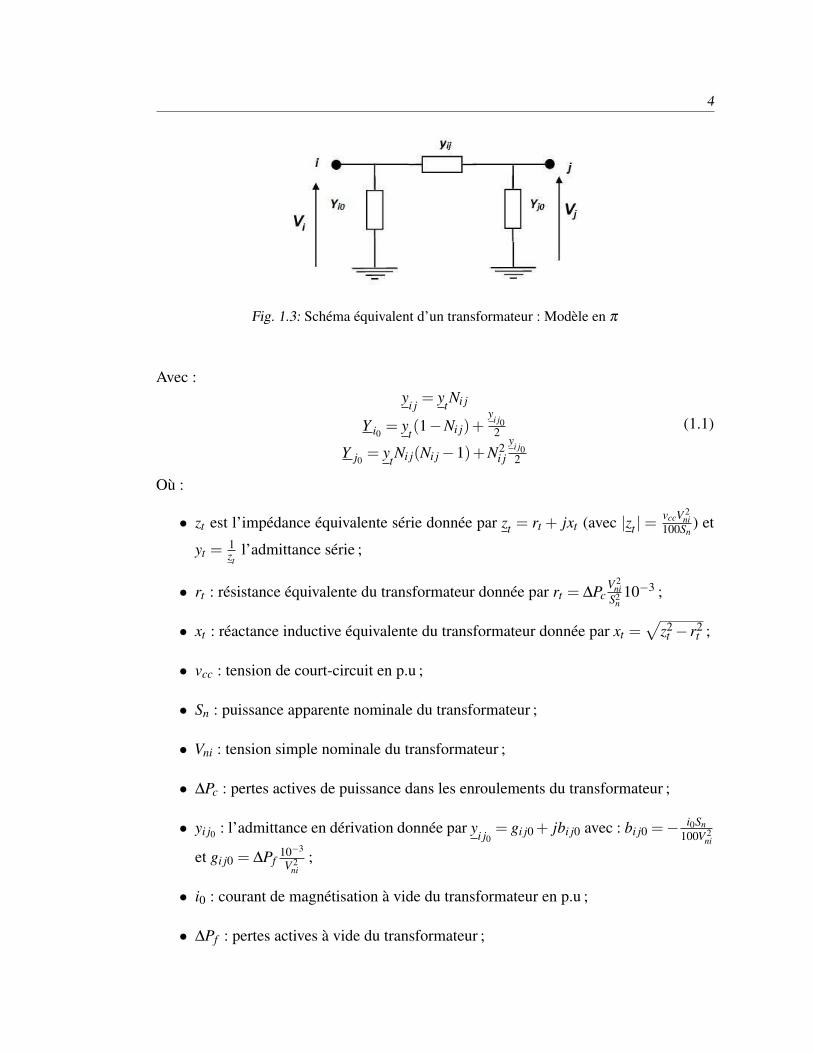
1.2.2 Modèle du transformateur
Le modèle souvent utilisé du transformateur entre les noeuds i et j est donné dans
un système normalisé (système "per unit"). La figure 1.3 suivante donne le schéma de ce
modèle :
4
Fig. 1.3: Schéma équivalent d’un transformateur : Modèle en π
Avec :
yi j= y
tNi j
Y i0= y
t(1−Ni j)+
yi j0
2
Y j0= y
tNi j(Ni j −1)+N2
i j
yi j0
2
(1.1)
Où :
• zt est l’impédance équivalente série donnée par zt = rt + jxt (avec |zt | =vccV
2ni
100Sn) et
yt =1zt
l’admittance série ;
• rt : résistance équivalente du transformateur donnée par rt = ∆PcV 2
ni
S2n
10−3 ;
• xt : réactance inductive équivalente du transformateur donnée par xt =√
z2t − r2
t ;
• vcc : tension de court-circuit en p.u ;
• Sn : puissance apparente nominale du transformateur ;
• Vni : tension simple nominale du transformateur ;
• ∆Pc : pertes actives de puissance dans les enroulements du transformateur ;
• yi j0 : l’admittance en dérivation donnée par yi j0
= gi j0+ jbi j0 avec : bi j0 =− i0Sn
100V 2ni
et gi j0 = ∆Pf10−3
V 2ni
;
• i0 : courant de magnétisation à vide du transformateur en p.u ;
• ∆Pf : pertes actives à vide du transformateur ;

5
• Ni j =Vi
V j: le rapport nominale de transformation.
Cette étape de modélisation de la ligne et ses éléments est essentielle pour le calcul
des équations principales du réseau particulièrement la matrice d’admittance nodale.
1.3 Matrice d’admittance nodale
Cette matrice est l’élément de base pour l’étude des différents aspects liés au fonc-
tionnement du réseau électrique. C’est l’expression :
[Y nn][V n] = [In] (1.2)
où :
• n est le nombre des noeuds du réseau ;
• [In] est le vecteur courants dans les noeuds ;
• [V n] est le vecteur tensions nodales ;
• [Y nn] est la matrice d’admittance nodales ayant comme termes :
Y ii = ∑nj=1(yi j
+ yi j0) = Gii + jBii
Y i j =−yji= Gi j + jBi j
(1.3)
Les règles générales d’écriture directe de la matrice [Y nn] sont :
• Y ii est l’admittance propre associée au noeud i. Elle est égale à la somme des
admittances des branches incidentes à ce noeud.
• Y i j est l’admittance de transfert associée aux noeuds i et j. Elle est égale à l’ad-
mittance de la branche qui joint ces deux noeuds changée de signe.
Après la présentation des modèles et de la matrice de l’admittance nodale du réseau, il
devient accessible de présenter le fonctionnement de ce dernier dans ses aspects statique
et dynamique.
6
1.4 Aspect Statique
Dans cet aspect deux modes fondamentaux sont à évoquer :
• Calcul de répartition de charge (communément appelée "flux de puissance" ou en
anglais "Load Flow").
• Estimation d’état statique.
1.4.1 Notion de flux de puissance
Une présentation de cette notion de flux de puissance [2] dans ces aspects mathéma-
tiques, algorithmiques [1] [3] et de simulation sont données dans ce paragraphe. Ceci
est directement lié au topologie du réseau et au nombre de noeuds qui le constitue. Un
exemple d’application sur un réseau test trois noeuds selon la standard IEEE sera pré-
senté.
1.4.1.1 Notion de Noeuds
La gestion du réseau électrique par l’utilisation de son schéma équivalent en π passe
nécessairement par la gestion du flux de puissance transitant par les noeuds. Ces derniers
sont l’élément de départ de chaque étude du réseau.
L’état électrique d’un noeud est caractérisé par 4 variables : Tension et Phase (Vi,θi)
et les puissances active et réactive (Pi,Qi). Selon le type de noeud, deux variables sont
données, les deux autres restent à déterminer [1]. On définit alors deux types de noeuds :
• Noeuds charges : (Noeud PQ) : Noeud pour lequel les puissances active et réac-
tive (P,Q) sont toujours données. La tension en module et en phase (V,θ ) sont à
calculer.
• Noeuds générateur :(Noeud PV ) : Noeud pour lequel la puissance active et le
module de tension sont données. La puissance réactive et la phase (Q,θ ) sont à
déterminer.

7
D’autres combinaisons sont possibles. On évoque les noeuds bilan et les noeuds à tension
contrôlée. Le tableau 1.I suivant présente l’ensemble des noeuds pouvant être utilisées
dans un réseau électrique. Rappelons que l’usage des grandeurs nodales impose un signe
Grandeurs connues Grandeurs à calculer
Noeud bilan |V |,θ = 0 P,QNoeuds charges P,Q |V |,θ
Noeuds générateurs |V |,P θ ,QNoeuds à tension contrôlée |V |,P,Q θ ,Ni j
Tab. 1.I: Type des noeuds dans un réseau électrique
positif pour les puissances actives des générateurs et négatif pour les charges.
Le traitement mathématique pour un réseau électrique de N-noeuds passe par l’établis-
sement de 2N équations algébriques.
1.4.1.2 Aspects mathématiques
Selon le modèle donné par la figure 1.2 du paragraphe Modèle de la ligne on peut
écrire :
V i =Viejθi
V j =Vjejθ j
(1.4)
avec θ étant le déphasage entre la tension et le courant dans le noeud.
Les expressions des puissances active Pi j et réactive Qi j de transit en i sur une liaison
i− j sont données par les relations ci-dessous [4] [5] :
Pi j =V 2i Gi j +ViVj[Gi j cos(θi −θ j)+Bi j sin(θi −θ j)]
Qi j =−V 2i Bi j −ViVj[Gi j sin(θi −θ j)−Bi j cos(θi −θ j)]
(1.5)
De même les expressions des puissances nodales active Pi et réactive Qi sont les sui-
vantes :
Pi =Vi ∑nj=1Vj[Gi j cos(θi −θ j)+Bi j sin(θi −θ j)]
Qi =−Vi ∑nj=1Vj[Gi j sin(θi −θ j)−Bi j cos(θi −θ j)]
(1.6)

8
La puissance dans un noeud i doit vérifier l’expression suivante :
Pi − ∑j∈ν(i)
Pi j = 0
Où ν(i) est le sous-ensemble des noeuds raccordés au noeud i.
De même pour la puissance réactive :
Qi − ∑j∈ν(i)
Qi j = 0
1.4.1.3 Méthode de Newton-Raphson
La méthode de Newton-Raphson est la plus utilisée pour la résolution d’un système
de 2N équations établit pour le réseau. Dans le cas d’un système d’équations non li-
néaires, on peut appliquer la méthode de Newton-Raphson de la façon suivante [6]. Soit
le système à résoudre (n = 2N) :
f1(x1, . . . ,xn) = Y1
. . .
fn(x1, . . . ,xn) = Yn
(1.7)
Le principe de cette méthode consiste à supposer qu’à partir d’un ensemble de valeurs
initiales x01, . . . ,x
0n, on cherche les variations dx1, . . . ,dxn qui satisfont les relations du
système ci dessus. L’application de la formule de Taylor permet de simplifier les expres-
sions obtenues en permettant d’écrire la forme matricielle suivante :
[ f (X0 +dX)] = [ f (X0)]+ [J(X0)][dX ] = [Y ] (1.8)
Où : [J] = [ ∂ fi∂x j
]; i, j = 1, . . . ,n est la matrice Jacobienne.
Pour un réseau où en supposant Pi et Qi sont connues, on calcul les écarts ∆Vi et ∆θi
permettant d’annuler les écarts des puissances active et réactive.

9
Soient :
Pimpi −Pi = ∑
nj=1(
∂Pi
∂V j∆Vj +
∂Pi
∂θ j∆θ j)
Qimpi −Qi = ∑
nj=1(
∂Qi
∂V j∆Vj +
∂Qi
∂θ j∆θ j)
(1.9)
Le temps de calcul peut être réduit si on exprime les inconnues par ∆θi et ∆Vi
Vi.
Les expressions des dérivées partielles se déduisent immédiatement des relations (1.10)
suivantes :∂Pi
∂θi= Hii =−Qi −BiiVi
∂Pi
∂θ j= Hi j =ViVj[Gi j sin(θi −θ j)−Bi j cos(θi −θ j)]
∂Pi
∂ViVi = Nii = GiiVi +Pi
∂Pi
∂V jVj = Ni j =ViVj[Gi j cos(θi −θ j)+Bi j sin(θi −θ j)]
∂Qi
∂θi= Jii = Pi −GiiVi
∂Qi
∂θ j= Ji j =−Ni j
∂Qi
∂ViVi = Lii = Qi −BiiVi
∂Qi
∂V jVj = Li j = Hi j
(1.10)
Ce qui donne le système matriciel suivant :
∆P
∆Q
=
J1 J2
J3 J4
∆θ
∆VV
(1.11)
Avec :
[J1] =
[
∂Pi
∂θ j
]
; [J2] =
[
∂Pi
∂VjVj
]
; [J3] =
[
∂Qi
∂θ j
]
; [J4] =
[
∂Qi
∂VjVj
]
(1.12)
où : i, j = 1,2, ...,N
L’algorithme est resoulu en suivant ces étapes :
1. Calcul des puissances nodales Pi, Qi et par la suite ∆Pi, ∆Qi d’aprés l’équation
(1.9).
2. Calcul de la matrice jacobienne J (équation 1.11) .
3. Détermination de ∆θi et ∆Vi
Vi.

10
4. Mise à jour des phases (θ i+1) et des tensions nodales (V i+1) par :
V (i+1) =V (i)+∆V (i)
θ (i+1) = θ (i)+∆θ (i)
5. Vérification de la condition de convergence de cet algorithme aboutissant à ∆P(i),∆Q(i)≤
ε , Sinon retour à l’étape 1.
1.4.1.4 Méthodes Découplées
L’objectif de cette méthode étant le même que la méthode précédente, celle ci a
l’avantage de réduire le temps de calcul [7] mais l’inconvénient quelle ne soit applicable
pour les réseaux hautes tension.
Dans un réseau à haute tension, il est connue que les phases régissent essentiellement la
circulation des puissances actives et que les modules des tensions nodales sont principa-
lement dépendants de la circulation des puissances réactives. Dans ces conditions, ceci
conduit à l’annulation des sous matrices [J2] et [J3] dans le système 1.11, ce qui permet
l’obtention de deux systèmes dont la dimension de la matrice à inverser est quatre fois
plus petite :
[∆θ ] = [J1]−1[∆P]
[
∆VV
]
= [J4]−1[∆Q]
(1.13)
Pour encore réduire d’avantage le temps de calcul, notamment dans l’étude répétée de
sécurité N −1 (perte d’un élément de production ou de transmission), une méthode dite
"rapide" est proposée [1]. Les éléments des matrices [J1] et [J4], dans ce cas sont simpli-
fiés en négligeant les parties réelles des admittances des lignes en assimilant le sinus de
la différence des phases entre noeuds à zéro et la différence d’angle de cosinus à l’unité,
ce qui permet d’écrire :
[∆θ ] = [B′]−1
(
∆PV
)
[∆V ] = [B”]−1(
∆QV
) (1.14)

11
où : B′
i j = Bi j (suceptance de la ligne i j) si i 6= j et B′
ii =−∑Nj=1 Bi j
et, B”i j = Bi j si i 6= j et B”
ii =(
−∑Nj=1 Bi j
)
+2Bsii (Bsii étant la suceptance shunt au noeud
i).
Les matrices [B′] et [B”] sont réelles et symétriques.
1.4.1.5 Exemple de simulation 1
Une application des méthodes décrites précédemment sur un réseau test 3 noeuds
suivant le standard IEEE (voir annexe I) est présentée dans cet exemple. Le réseau test
est composé de 2 noeuds générateurs. Le noeud 1 est pris comme noeud de référence et
le noeud 2 comme noeud charge.
La formulation mathématique de cet exemple avec la méthode de Newton-Raphson (N-
R) est alors :
∆P2
∆Q2
∆P3
=
H22 N22 H23
J22 L22 J23
H32 N32 H33
.
∆θ2
∆V2V2
∆θ3
Pour la méthode découplée ordinaire (M-D), on extrait directement les valeurs de J1 et
J4 du jacobéen formé par la méthode de Newton.
Pour la méthode découplée rapide (M-D-R) on procède à la formulation suivante :
∆P2V2
∆P3
V3
=
B′22 B′
23
B′32 B′
33
.
∆θ2
∆θ3
[
∆Q2V2
]
= B′′22.∆V2
Avec : B′22 = 9.80198,B′
23 = B′32 =−5.4455,B′
33 = 12.25247 et B′′22 =− Im(Y22) =
0.043049.
On choisit les valeurs initiales suivantes pour les tensions nodales et les phases :
V1 = 230KV , θ1 = 0, V(0)2 = 220KV , θ
(0)2 = 0, et V
(0)3 = 228KV , θ
(0)3 = 0 ; et on applique
les algorithmes jusqu’à ce que ∆P(i),∆Q(i) ≤ ε = 0.05.
Dans ce qui suit, on présente quelques courbes montrant l’évolution du calcul et la rapi-
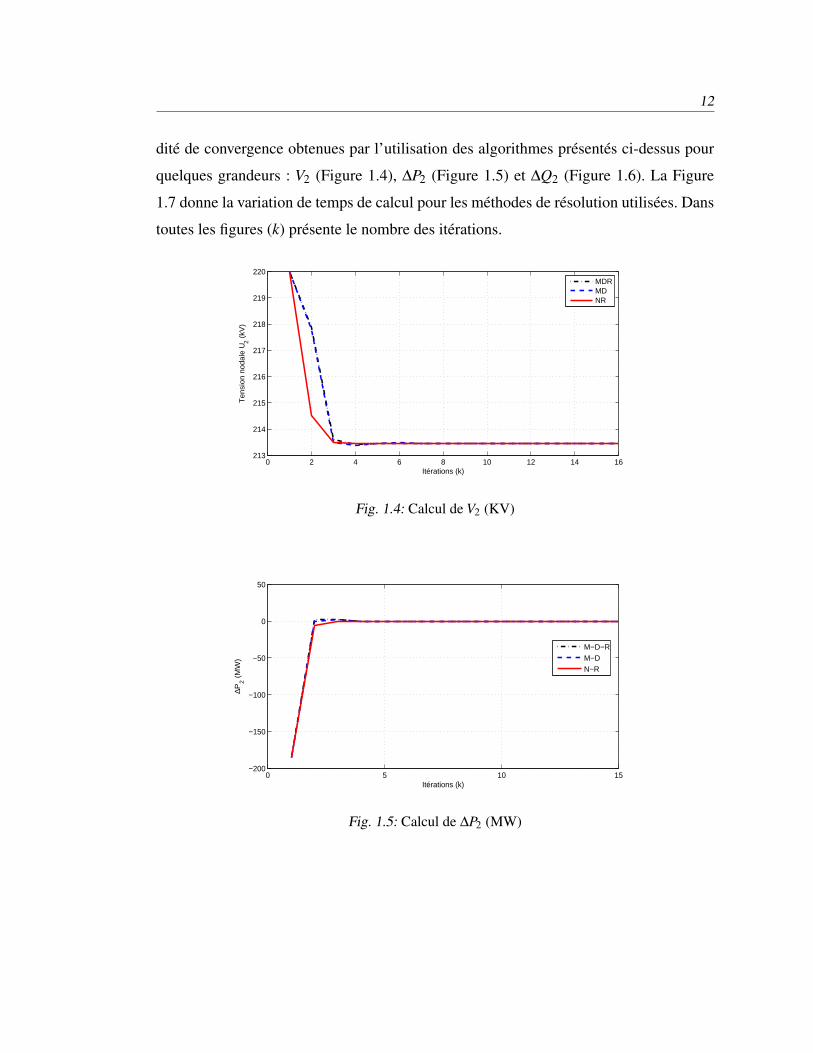
12
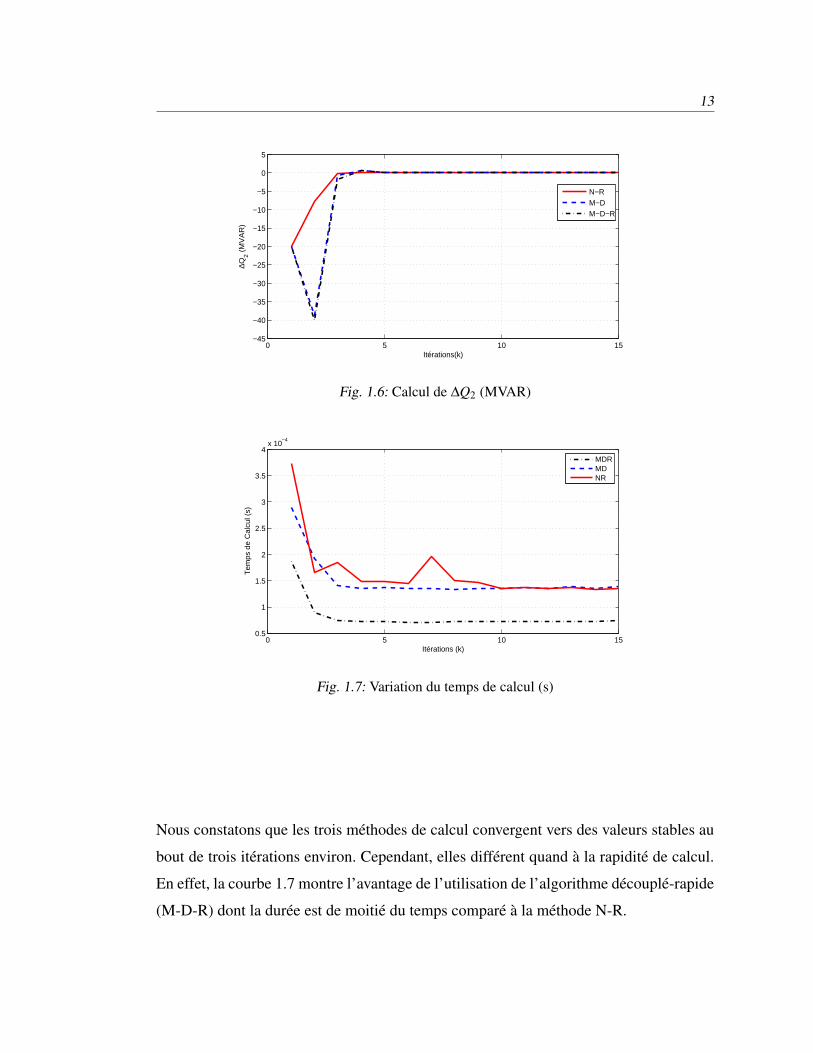
dité de convergence obtenues par l’utilisation des algorithmes présentés ci-dessus pour
quelques grandeurs : V2 (Figure 1.4), ∆P2 (Figure 1.5) et ∆Q2 (Figure 1.6). La Figure
1.7 donne la variation de temps de calcul pour les méthodes de résolution utilisées. Dans
toutes les figures (k) présente le nombre des itérations.
0 2 4 6 8 10 12 14 16213
214
215
216
217
218
219
220
Itérations (k)
Ten
sion
nod
ale
U2 (
kV)
MDRMDNR
Fig. 1.4: Calcul de V2 (KV)
0 5 10 15−200
−150
−100
−50
0
50
Itérations (k)
∆P2 (
MW
)
M−D−RM−DN−R
Fig. 1.5: Calcul de ∆P2 (MW)
13
0 5 10 15−45
−40
−35
−30
−25
−20
−15
−10
−5
0
5
Itérations(k)
∆Q2 (
MV
AR
)
N−RM−DM−D−R
Fig. 1.6: Calcul de ∆Q2 (MVAR)
0 5 10 150.5
1
1.5
2
2.5
3
3.5
4x 10
−4
Itérations (k)
Tem
ps d
e C
alcu
l (s)
MDRMDNR
Fig. 1.7: Variation du temps de calcul (s)
Nous constatons que les trois méthodes de calcul convergent vers des valeurs stables au
bout de trois itérations environ. Cependant, elles différent quand à la rapidité de calcul.
En effet, la courbe 1.7 montre l’avantage de l’utilisation de l’algorithme découplé-rapide
(M-D-R) dont la durée est de moitié du temps comparé à la méthode N-R.

14
1.4.2 Notion d’estimation d’état
1.4.2.1 Introduction
Dans les centres modernes de conduite des réseaux électriques les fonctions de sécu-
rité, sous forme de programmes exécutés en temps réel, sont destinés à aider l’opérateur
à maintenir le système dans un état de fonctionnement normal quelque soient les pertur-
bations.
Disposer d’un historique récent de l’état du réseau et de ses différents paramètres
de contrôle facilite cette tâche. Un modèle d’estimation d’état joue alors un rôle central
essentiel permettant de fournir une " image instantanée " fiable, cohérente et complète de
la valeur de toutes ces paramètres. Dans le cas où c’est la tension nodale et sa phase qui
sont les paramètres à estimer, l’estimateur d’état cherche les valeurs qui correspondent
au mieux avec les valeurs mesurées et disponibles à un instant donné.
1.4.2.2 Procédure
On procède souvent en trois étapes :
• On considère le modèle de travail qui est généralement le modèle monophasé.
• L’état du réseau, dont le nombre de noeuds N est fixé par le modèle, est com-
plètement défini par le vecteur d’état [x] formé par les modules et les phases des
tensions nodales :
[x] = [V1,V2,θ2,V3, ...,VN ,θN ]T
. Le noeud 1 dans ce cas est considéré comme
noeud bilan.
• On cherche le vecteur [x] qui soit le plus fiable possible en dépit des erreurs qui
entachent les mesures et les données à partir desquelles il a été estimé.
Différentes méthodes d’estimation d’état sont utilisées. On cite particulièrement les tech-
nique des moindres carrés pondérés complète [8] [5], les techniques se basant sur les
puissances de transits en ligne [9] et les algorithmes découplés [10] [11].

15
1.4.2.3 Modèle mathématique
Soit n le nombre de composants du vecteur d’état et soit m > n le nombre des com-
posants du vecteur de mesure [z].
Considérons que chacune des i mesures (i : 1...m) est entachée d’erreur εi. Ceci nous
permet d’écrire :
zi = zi,e + εi (1.15)
Où : zi est la valeur mesurée ; zi,e : valeur exacte, mais inconnue, de la grandeur mesurée ;
εi : l’erreur de mesure qui peut être positive ou négative.
• Hypothèses :
- En notant E espérance mathématique, on suppose que l’erreur εi a une valeur
moyenne nulle et un écart-type σi tel que E(εi) = 0 et E(ε2i) = σ2
i.
- On admettra qu’il n’y a pas de corrélation entre les erreurs, donc E(εiε j) = 0
pour i 6= j ( j : 1...m).
• Modélisation :
En exprimant zi sous forme matricielle, nous obtenons :
[z] = [ f [x]]+ [ε] (1.16)
Où : [z] =
z1
......
zm
; [ f [x]] =
f1[x]
.........
fm[x]
; [x] =
x1
....
xn
=
θ2
.....
θN
V1
.....
VN
et : E[ε] = [0];E[[ε][ε]T ] = [R] =
σ12...........
..................
...............σm2
, [R] étant la matrice diago-
nale de covariance des mesures.

16
1.4.2.4 Algorithme de moindres carrés (A.M.C)
L’état véritable [x] est toujours inconnu. A partir des valeurs mesurées [z], on cherche
une estimation [x] de l’état du réseau tel que les fonctions [ f ([x])] s’ajustent au mieux
avec les valeurs de [z]. Pour chacune des variables xi il faut disposer d’au moins une
mesure indépendante. Il est souhaitable d’obtenir un état estimé [x] qui présente une
probabilité maximale de coïncidence avec l’état vrai [x]. On cherche donc à maximiser
la probabilité permettant d’aboutir à [ f ([x])] = [ f ([x])] ou aussi à minimiser :
J([x]) =m
∑i=1
Wiεi =m
∑i=1
[zi − fi([x])]2/σi
2 = [[z]− [ f ([x])]]T [R]−1[[z]− [ f ([x])]] (1.17)
Wi étant les coefficients de pondération et [R]−1 = [W ] (W étant la matrice de l’ensemble
des valeurs Wi).
La minimisation de l’expression (1.17) est une estimation au sens des moindres carrés
pondérés (Weighted Least Squares ou WLS). On minimise la somme des écarts entre
les valeurs mesurées et valeurs calculées en pondérant chacun des termes par la variance
de la mesure correspondante. L’état estimé par cette méthode possède les propriétés
statistiques suivantes :
• Il n’est pas biaisé : E([x]− [x]) = [0].
• Il possède la variance minimale :
E[([x]− [x])([x]− [x])T ]< E[([x]− [x′])([x]− [x′])T ],∀[x′] 6= [x]
Un estimateur possédant ces propriétés est qualifié d’optimal. La minimisation de J([x])
se traduit encore par :
∇xJ(x) |x=x =
∂J([x])∂x1
∂J([x])∂x2
...........
(1.18)

17
donc [x] satisfait les conditions d’optimalité :
∇xJ(x) |x=x =−2
[H(x)]T [R]−1
z1 − f1(x)
z2 − f2(x)
............
= 0 (1.19)
Avec H(x) la matrice jacobienne donnée par :
H(x) =
∂ f1∂x1
∂ f1∂x2
.... ∂ f1∂xn
....... .......... ....... .........∂ fm∂x1
∂ fm∂x2
.... ∂ fm∂xn
(1.20)
Le système d’équations non linéaires (1.19) est résolu de manière classique par la mé-
thode de Newton-Raphson et est linéarisé par un développement en série de Taylor au
voisinage d’une solution initiale du vecteur d’état [8]. On déduit ensuite l’approximation
à l’itération suivante par (schéma itératif) :
[xk+1] = [xk]+ [[H(xk)]T[R]−1[H(xk)]]
−1[H(xk)]
T[R]−1[[z]− [ f (xk)]] (1.21)
La résolution de l’équation ci-dessus est liée à l’existance de l’inverse de matrice de gain
[[H(xk)]T[R]−1[H(xk)]] = [Gk] et que m > 2N −1.
1.4.2.5 Algorithmes Simplifiés à matrice constante
Cette méthode est une variante de la méthode A.M.C exposée ci-dessus. Elle est
appliquée surtout lorsque l’observation de l’état estimé est peu éloignée de l’état initial.
Par conséquent les éléments des matrices jacobienne et de gain, varient très peu d’une
itération à l’autre. Deux méthodes de traitement existent [1] :
1. La première méthode (M.S.1), calcule la matrice jacobienne à chaque itération
mais conserve la matrice de gain constante après la première ou deuxième itéra-
tion :
[Gk][[xk+1]− [xk]] = [H(xk)]
T[R]−1[[z]− [ f (xk)]] (1.22)

18
Où : [Gk][∆xk] = [H(xk)]T[R]−1[[z]− [ f (xk)]] , avec [Gk] constante. L’avantage de
cette méthode est de réduire le temps de calcul de la matrice de gain.
2. La seconde méthode (M.S.2), suppose que les deux matrices, jacobienne et de
gain, restent constantes à partir d’une itération n. Dés que k > n (k nombre d’ité-
rations), on aura :
[Gn][∆xk] = [H(xn)]T [R]−1[[z]− [ f (xk)]] (1.23)
avec : [[H(xn)]T [R]−1[H(xn)]] = [Gn].
Cette méthode est particulièrement utile si n = 1 et Vi =Vj = 1 et θi = θ j = 0.
1.4.2.6 Algorithmes Découplés
Ces algorithmes, comme dans le cas de calcul de répartition des charges, repose
sur le découplage actif/réactif donc phase/module de tension. Ce type d’estimateur [10]
convient essentiellement aux réseaux dont les branches présentent un rapport X/R élevé.
En premier lieu, on réécrit le vecteur de mesures et d’état comme suit :
[z] =
[zP]
[zQ]
; [x] =
[θ ]
[U ]
Les décompositions correspondantes de [H] et [G] sont :
[H([U ], [θ ])] =
[HPθ ] [HPV ]
[HQθ ] [HQV ]
(1.24)
[G([U ], [θ ])] =
[Gθθ ] [GθV ]
[GV θ ] [GVV ]
(1.25)
L’équation de la méthode de base :
[G([U ], [θ ])][∆x] = [r] (1.26)
19
Avec : [G] = [H]T [R]−1[H] ; [∆x] =
[∆θ ]
[∆U ]
;[R] =
[RP] 0
0 [RQ]
; et [r] =
[rθ ]
[rV ]
=
[H]T [R]−1[[z]− [ f (x)]] devient avec ce découplage :
[Gθθ ][∆θ ] = [rθ ] (1.27)
[GVV ][∆V ] = [rV ] (1.28)
En général, on résout d’abord l’équation (1.27) pour introduire les phases améliorées
dans l’équation (1.28).
Pour ce type de découplage, [HPV ] ≈ 0 et [HQθ ] ≈ 0, les matrices de gain sont les sui-
vantes :
[Gθθ ] = [HPθ ]T [RP]
−1[HPθ ] (1.29)
[GVV ] = [HQV ]T [RQ]
−1[HQV ] (1.30)
1.4.2.7 Algorithme Découplé Rapide (Fast Decoupled Estimator F.D.E)
La méthodologie proposée [9] est basée sur les mesures des puissances actives et ré-
actives qui transitent dans les lignes et des tensions. Les mesures de ces puissances sont
combinés en utilisant des facteurs de multiplication qui permettent de découpler l’équa-
tion de base en deux équations simplifiant ainsi la résolution. Les matrices Jacobiennes
résultantes sont constantes et sont calculées seulement une fois au début du processus
itératif [12].
La procédure de cette méthode repose sur la connaissance des puissances actives et réac-
tives dans une ligne l située entre les noeuds i et j. Ces puissances sont données par les
équations (1.5). Elles peuvent être combinées pour former deux ensembles de mesures,
réels g et imaginaires f , en utilisant les facteurs αi j et βi j comme suit :
gi j = αi jPi j +βi jQi j
fi j =−βi jPi j +αi jQi j
(1.31)

20
Les équations (1.5) et (1.31) sont linéarisées autour d’un point de fonctionnement défini.
Nous obtenons alors :
K N
M L
∆θ
∆V
=
∆g
∆ f
(1.32)
où :
∆gi j = (αi j∆Pmi j +βi j∆Qm
i j)/ViVj
∆ fi j =
(−βi j∆Pmi j +αi j∆Qm
i j)/Vj
∆V m
(1.33)
Avec :
• ∆Pmi j , ∆Qm
i j et ∆V m : les différences entre les valeurs mesurées et calculées.
• K = ∂g∂θ , N = ∂g
∂V, M = ∂ f
∂θ et L = ∂ f∂V
sont les dérivés partielles des fonctions g et
f .
L’état estimé est finallement donné par :
(
LT R j−1L
)
[∆V ] = LT R j−1 [∆ f ]
(
KT Rp−1K
)
[∆θ ] = KT Rp−1 [∆g′]
(1.34)
avec : [∆g′] = [∆g]− [N] [∆V ].
Les facteurs de multiplication sont choisis de manière à ce que αi j = Bi j et βi j = Gi j.
1.4.2.8 Méthode des Médianes (Least Median of Squares L.M.S)
Cette méthode [5]) se base sur la minimisation du critère suivant :
J([x]) = median
(zi − fi([x]))2
(1.35)

21
Nous avons proposé une version modifiée de cette méthode [13] (M.L.M.S) qui repose
sur la minimisation de critére :
J([x]) = median
(zi − fi([x]))2
σ2i
(1.36)
ceci conduit à la minimisation de l’expression :
minx
median([z−h(x)]T R−1[z−h(x)])
(1.37)
La solution est obtenue en résolvant itérativement le problème de programmation linéaire
donné par l’équation ci-dessus permettant d’avoir ∆x suffisamment faible. D’autres mé-
thodes d’estimation d’état sont proposées par la littérature tel que : la méthode WLS
modifiée [14], les méthodes se basant sur les réseaux de neurones [15], la méthode non
gaussienne [16]. Dans ce que nous avons exposé ci-dessus, on s’est limité aux méthodes
de base et aux méthodes les plus actuelles.
1.4.2.9 Observabilité pour l’estimation d’état
La vérification de l’observabilité du système, est la première étape à réaliser avant
l’application de l’estimateur. On procède de la manière suivante :
• En disposant de m mesures (m > 2N − 1) auxquelles sont associées m équations,
l’estimateur doit résoudre un système de m équations à 2N − 1 inconnues. Ceci
n’est possible que si la matrice jacobienne du système est de rang 2N−1. Dans ce
cas le réseau est observable.
• Si le réseau est observable l’estimateur doit être capable de détecter les mesures
erronées. On définit alors un coefficient dit de redondance globale donné par le
rapport du nombre de mesures au nombre de variables d’état soit :η = mn= m
2N−1.
Dans la pratique on considère qu’une redondance comprise entre 1,5 et 2,5 est
suffisante pour un bon fonctionnement de l’algorithme.

22
Dans la littérature plusieurs méthodes de base sont proposées pour la vérification de
l’observabilité. Nous présentons dans ce qui suit deux de ces méthodes.
1. Analyse par le rang de la matrice Jacobienne :
L’algorithme itératif (1.21) exige que la matrice [G] soit régulière. Si de plus la
matrice [R] est diagonale définie positive et régulière, (alors la matrice jacobienne
[H] est de rang complet), un réseau de N noeuds (dont le vecteur d’état [x] est de
dimension 2N − 1) est dit algébriquement observable si le rang de [H] est 2N −
1 pour tout x. Un réseau sera donc observable si les n colonnes de la matrice
jacobienne [H] sont linéairement indépendantes.
2. Analyse d’observabilité par la topologie :
La définition la plus utilisée pour l’observabilité d’un réseau est basée sur la ver-
sion découplée de l’estimation par moindres carrés [17]. Dans cette hypothèse, les
différentes mesures sont liées aux inconnues par l’équation suivante :
[zP]
[zQ]
=
[HPθ ] [0]
[0] [HQV ]
.
[Xθ ]
[XV ]
+
[εP]
[εQ]
(1.38)
Pour ce type de représentation, le réseau est algébriquement observable si :
rang[HPθ ] = N −1
rang[HQV ] = N(1.39)
Le problème du rang revient à un problème de connectivité : Un réseau est observable
du point de vue phases si tous les noeuds sont reliés par des mesures de puissance active
de sorte que toutes les phases pourront être calculées dès qu’un noeud de référence sera
fixé.
D’autres méthodes d’analyse d’observabilité sont aussi proposées dans la littérature
comme : l’observabilité par PMU (Phasor Measurement Units) [18], Observabilité par
signaux sinusoïdaux [19],...
23
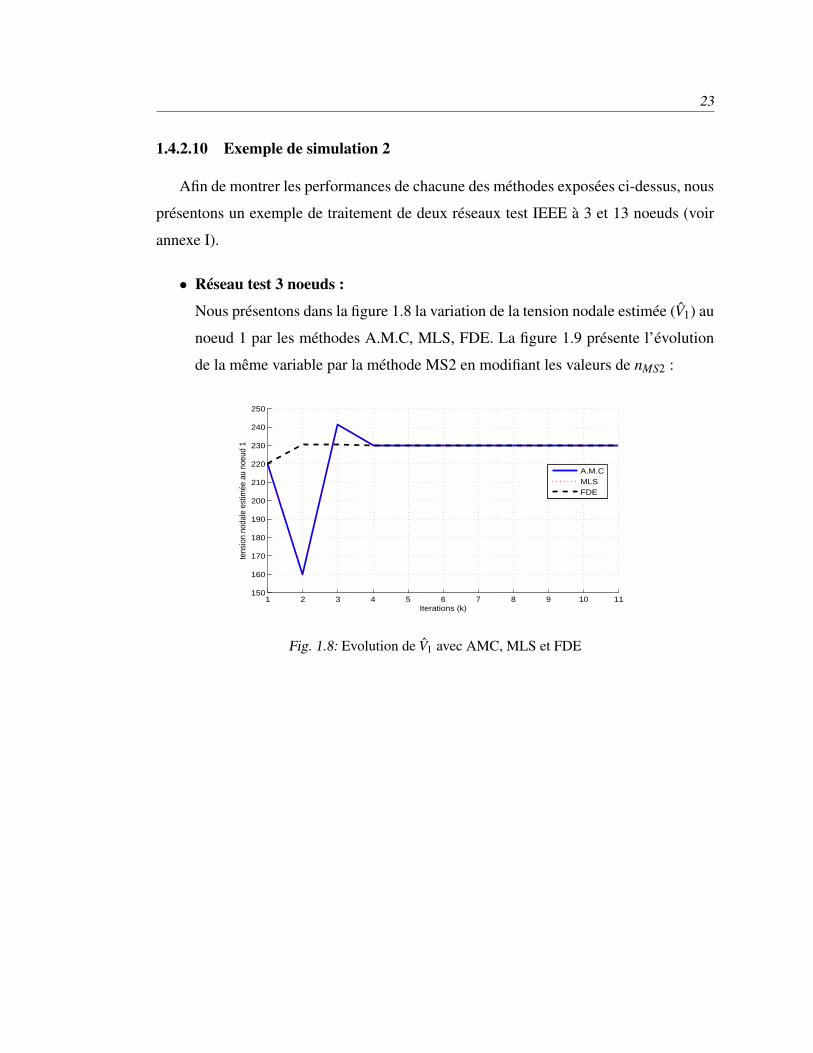
1.4.2.10 Exemple de simulation 2
Afin de montrer les performances de chacune des méthodes exposées ci-dessus, nous
présentons un exemple de traitement de deux réseaux test IEEE à 3 et 13 noeuds (voir
annexe I).
• Réseau test 3 noeuds :
Nous présentons dans la figure 1.8 la variation de la tension nodale estimée (V1) au
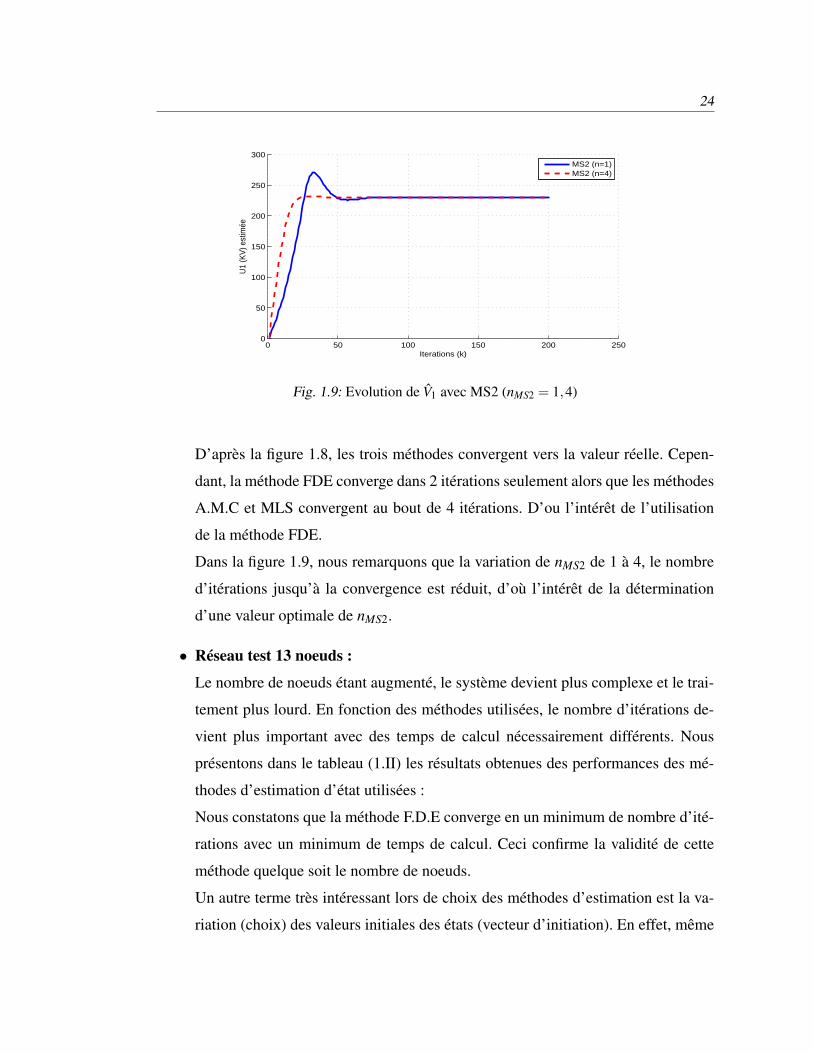
noeud 1 par les méthodes A.M.C, MLS, FDE. La figure 1.9 présente l’évolution
de la même variable par la méthode MS2 en modifiant les valeurs de nMS2 :
1 2 3 4 5 6 7 8 9 10 11150
160
170
180
190
200
210
220
230
240
250
Iterations (k)
tens
ion
noda
le e
stim
ée a
u no
eud
1
A.M.CMLSFDE
Fig. 1.8: Evolution de V1 avec AMC, MLS et FDE
24
0 50 100 150 200 2500
50
100
150
200
250
300
Iterations (k)
U1
(KV
) est
imée
MS2 (n=1)MS2 (n=4)
Fig. 1.9: Evolution de V1 avec MS2 (nMS2 = 1,4)
D’après la figure 1.8, les trois méthodes convergent vers la valeur réelle. Cepen-
dant, la méthode FDE converge dans 2 itérations seulement alors que les méthodes
A.M.C et MLS convergent au bout de 4 itérations. D’ou l’intérêt de l’utilisation
de la méthode FDE.
Dans la figure 1.9, nous remarquons que la variation de nMS2 de 1 à 4, le nombre
d’itérations jusqu’à la convergence est réduit, d’où l’intérêt de la détermination
d’une valeur optimale de nMS2.
• Réseau test 13 noeuds :
Le nombre de noeuds étant augmenté, le système devient plus complexe et le trai-
tement plus lourd. En fonction des méthodes utilisées, le nombre d’itérations de-
vient plus important avec des temps de calcul nécessairement différents. Nous
présentons dans le tableau (1.II) les résultats obtenues des performances des mé-
thodes d’estimation d’état utilisées :
Nous constatons que la méthode F.D.E converge en un minimum de nombre d’ité-
rations avec un minimum de temps de calcul. Ceci confirme la validité de cette
méthode quelque soit le nombre de noeuds.
Un autre terme très intéressant lors de choix des méthodes d’estimation est la va-
riation (choix) des valeurs initiales des états (vecteur d’initiation). En effet, même

25
Méthode Itérations CPU time
A.M.C 15 0.3438 (s)
M.S.2 avec (n = 1) 270 0.6406 (s)
M.S.2 avec (n = 4) 19 0.31094 (s)
M.L.M.S 4 0.0313 (s)
F.D.E 2 0.00617 (s)
Tab. 1.II: Comparaison des Performances des méthodes d’estimation d’état
en variant ce vecteur d’état initiale (avec des valeurs acceptables de l’ordre de
±15%), les algorithmes doivent converger toujours vers la bonne solution. Ceci
met en évidence la robustesse de la méthode ou l’algorithme choisie.
1.5 Mode Dynamique
Le comportement dynamique d’un réseau électrique peut être modélisé avec une
combinaison d’équations différentielles non-linéaires et d’équations algébriques non-
linéaires [20], [5]. Les équations différentielles non-linéaires correspondent à la dyna-
mique non-linéaire des générateurs et les équations algébriques non-linéaires corres-
pondent aux contraintes algébriques des noeuds charges du réseau.
Si le réseau est à un point d’équilibre, en négligeant les équations différentielles non-
linéaires, on se trouve dans le cas d’étude du flux de puissance et le calcul se concentre
sur la recherche de la solution itérative des équations algébriques non-linéaires.
Pour l’analyse de la stabilité, le réseau étant toujours supposé en équilibre, les équations
différentielles non-linéaires sont seules à considérer. Les équations algébriques sont sup-
posées satisfaites.
Que le réseau soit en équilibre ou non, son modèle sous forme DAE inclut les deux en-
sembles d’équations différentielles et algébriques. La forme générale du modèle dans ce
cas est donnée par :
xd(t) = F(xd(t),xa(t),u(t))
0 = g(xd(t),xa(t))
y(t) = h(xd(t),xa(t))
(1.40)
26
xd(t) ∈ Rnd , xa(t) ∈ R
na sont respectivement les variables d’états dynamiques et algé-
briques, F(.) ∈ Rnd une fonction représentant les équations différentielles non linéaires,
g(.) ∈ Rna répresente les contraintes (équations) algébriques non linéaire, u(t) ∈ R
p la
commande et y(t) ∈ Rm la sortie du système.
Les modèles dynamiques existants traités sous forme de D.A.E, subissent, souvent, des
transformations :
• Soit pour les simplifier et les linéariser [21].
• Soit pour les rendre sous forme d’un système singulier non linéaire en insérant des
hypothèses simplificatrices sur la variation des phases ou des tensions [22]. Ceci
fait disparaitre certains paramètres (surtout les paramètres algébriques).
Nous présentons dans ce qui suit des nouveaux modèles (DAE) [5] prenant en compte
toutes les variables régissant le comportement d’un réseau électrique quelque soit la
nature des générateurs et des charges.
Cette représentation [5] prend en compte les variables et les paramètres internes de la
source (alternateur) ainsi que les équations algébriques définies précédemment dans le
calcul de bilan de puissance. Nous commençons cette représentation par la modélisation
dynamique des différentes composantes du réseau.
Soient : ng le nombre des générateurs ; nld nombre des charges dynamiques et nls nombre
des charges statiques.
• Modèle de la source (sans l’excitateur) :
Le comportement du générateur, dans le domaine électromécanique peut être mo-
délisé en utilisant l’équation classique d’oscillation [23],[24]. Cette équation mo-
délise la dynamique du rotor du générateur en particulier la différence entre le
couple mécanique et le couple électromagnétique. L’expression de l’équation, en
supposant que l’angle de rotation mécanique δ est égale à l’angle de rotation élec-
trique θ du générateur, étant :
δi = ωi
ωi +Dωi
M+ PGi(δ ,θ ,V )
M= PMi
M
(1.41)

27
ωi est la vitesse angulaire mécanique ; D est la constante d’amortissement du gé-
nérateur ; M est la constante d’inertie ; PMi est la puissance mécanique d’entrée ;
V est la tension nodale et PGi est la puissance électrique du générateur donnée par
l’expression :
PGi =N
∑j=1
|Vi|∣
∣Vj
∣
∣ [Gi j cos(δi −θ j)+Bi j sin(δi −θ j)]
où :i = 1, . . . ,ng et N le nombre totale des noeuds du réseau.
• Modèle de l’excitateur :
Le modèle non linéaire de base de l’excitateur utilisé dans la littérature est le sui-
vant [24] [5] :
E ′qi+
1
T ′do
[Xd
X ′d
E ′qi−
Vi(Xd −X ′d)cos(δi −θi)
X ′d
] =EFi
T ′do
(1.42)
E ′qi
est la f.e.m transitoire (proportionnelle au flux de l’enroulement d’excitation) ;
T ′do est la constante de temps de l’enroulement de l’excitation ;Xd est la réactance
synchrone longitudinale ; X ′d est la réactance transitoire longitudinale ; Vi est la
tension nodale et EFiest la f.e.m (proportionnelle à la tension d’excitation et géné-
ralement prise comme constante).
• Modèle de la charge :
1. Cas d’une charge statique :
Les charges statiques du système sont modélisées en utilisant les équations
algébriques non linéaires basées sur les puissances actives (Pj) et réactives
(Q j) consommées à chacun des noeuds charge du réseau. Soient les équa-
tions :
Pj −Pj(δ ,θ ,V ) = 0
Q j −Q j(δ ,θ ,V ) = 0(1.43)
avec j = ng +1, . . . ,ng +nls
2. Cas d’une charge dynamique :

28
Les équations du modèle employé pour représenter les charges dynamiques
sont liées à la fréquence (à travers la puissance active) et à la tension (à travers
la puissance réactive)[25]. Les expressions de ces équations sont données
par :
θl +1λl
Pl(δ ,θ ,V ) =− 1λl
Pl
vl +1vl
Ql(δ ,θ ,V ) =− 1vl
Ql
(1.44)
Où : vl et λl sont respectivement les coefficients de dépendance de la tension
et de la fréquence et Pl et Ql sont les puissances actives et réactives données
par l’équation (1.43).
• Modèle de la sortie mesure :
On suppose que toutes les équations de mesure (h(.)) sont les puissances actives
de transit à des endroits choisis dans le réseau et qui sont données par :
h(δ ,θ ,V ) = Pcd (1.45)
c,d : 1...N.
Pcd est la puissance de transit entre les noeuds c et d considérée comme la sortie
du système.
Après la modélisation de chacun des éléments du réseau, nous présentons dans ce
qui suit les 3 types A,B,C du modèle dynamique [5].
1.5.1 Modèle A
C’est le modèle qui met en évidence la dynamique du rotor et des charges statiques :
fiI : δi −ωi = 0
fiII : ωi +
Dωi
M+ PGi(x)
M= PMi
M
g jII : Pj −Pj(x) = 0
g jIII : Q j −Q j(x) = 0
hq : Pcd
(1.46)

29
Avec : i : 1...ng −1; j : ng +1....ng +nls
Ce même modèle peut être représenté sous la forme suivante :
F(x,x,β ) = u
p = h(x,β )(1.47)
Où : u = PMi
M,β = Y bus ,F(.) = [ fi,g j]
T et x = [δ ,ω,θ ,V ]T
1.5.2 Modèle B
Ce modèle met en évidence la dynamique du rotor et de l’excitateur avec des charges
statiques :
fiI : δi −ωi = 0
fiII : ωi +
Dωi
M+ PEi(x)
M= PMi
M
fiIII : E ′
qi+ 1
T ′do
[ Xd
X ′d
E ′qi−
Vi(Xd−X ′d)cos(δi−θi)
X ′d
] =EFi
T ′do
g jI : Pi −Pi(x) = 0
g jII : Pj −Pj(x) = 0
g jIII : Q j −Q j(x) = 0
hq : Pcd
(1.48)
Avec :i : 1...ng −1; j : ng +1....ng +nls;c,d : 1...N et :
PEi =V 2
i sin[2(δi −θi)(X′di −Xqi)]
2+
E ′qiVi
X ′di
sin(δi −θi)
De même, ce modèle peut être mis sous la forme donnée par 1.47 avec :
u = PMi
M,
EFi
T ′do
,β = Y bus ,F(.) = [ fi,gi,g j]T

30
1.5.3 Modèle C
Ce modèle inclut la dynamique du rotor avec des charges statiques et dynamiques :
fiI : δi −ωi = 0
fiII : ωi +
Dωi
M+ PGi(x)
M= PMi
M
f Il : θl +
1λl
Pl(x) =− 1λl
Pl
f IIl : vl +
1vl
Ql(x) =− 1vl
Ql
g jII : Pj −Pj(x) = 0
g jIII : Q j −Q j(x) = 0
hq : Pcd
(1.49)
Où : i : 1...ng −1; l : ng +1....ng +nld; j : ng +nld +1....nld +ng +nls;c,d : 1...N. De la
même façon que dans les modèles A et B, ce modéle peut être mis sous la forme donnée
par 1.47 avec :
u = PMi
M,−
Pl
λl
,−Ql
vl
,β = Y bus ,F(.) = [ fi, fl,g j]T
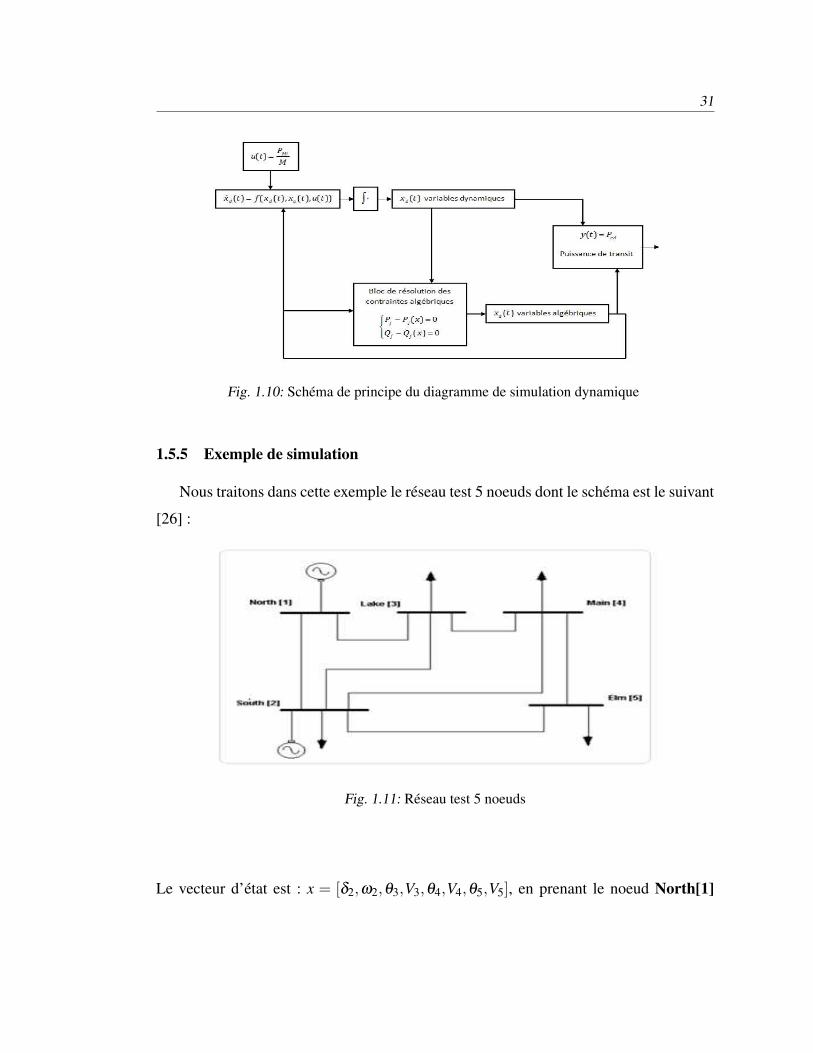
1.5.4 Diagramme de simulation dynamique
On propose dans cette section un simple diagramme de simulation des réseaux élec-
triques dynamiques (Figure 1.10) sous l’environnement SIMULINK de MAT LABr ba-
sée sur le modèle (1.40).
Pour la résolution des équations différentielles on utilise un bloc d’intégration associé à
une fonction Non Linéaire Fd(xd(t),xa(t),u(t)).
Pour la résolution des équations algébriques on fait appel à un bloc de résolution des
contraintes algébriques.
Le schéma de principe du diagramme de simulation est donné par la figure suivante :
31
Fig. 1.10: Schéma de principe du diagramme de simulation dynamique
1.5.5 Exemple de simulation
Nous traitons dans cette exemple le réseau test 5 noeuds dont le schéma est le suivant
[26] :
Fig. 1.11: Réseau test 5 noeuds
Le vecteur d’état est : x = [δ2,ω2,θ3,V3,θ4,V4,θ5,V5], en prenant le noeud North[1]
32
comme noeud bilan, le modèle dynamique de ce dernier est donné par :
f I : x1 = x2
f II : x2 +D2x2M2
+ PG2(x1,x3,x4,x5,x6,x7,x8)M2
= PM2M2
gI :
P3 −P3(x1,x3,x4,x5,x6) = 0
P4 −P4(x1,x3,x4,x5,x6,x7,x8) = 0
P5 −P5(x1,x5,x6,x7,x8) = 0
gII :
Q3 −Q3(x1,x3,x4,x5,x6) = 0
Q4 −Q4(x1,x3,x4,x5,x6,x7,x8) = 0
Q5 −Q5(x1,x5,x6,x7,x8) = 0
Les mesures peuvent être des puissances nodales, des puissances de transit, des tensions ;
...
Nous présentons dans ce qui suit les courbes d’évolution de quelques grandeurs du ré-
seau. Notant que les différentes grandeurs (puissance et paramètres des lignes se trouve
dans [26]) sont données en valeurs réduites.
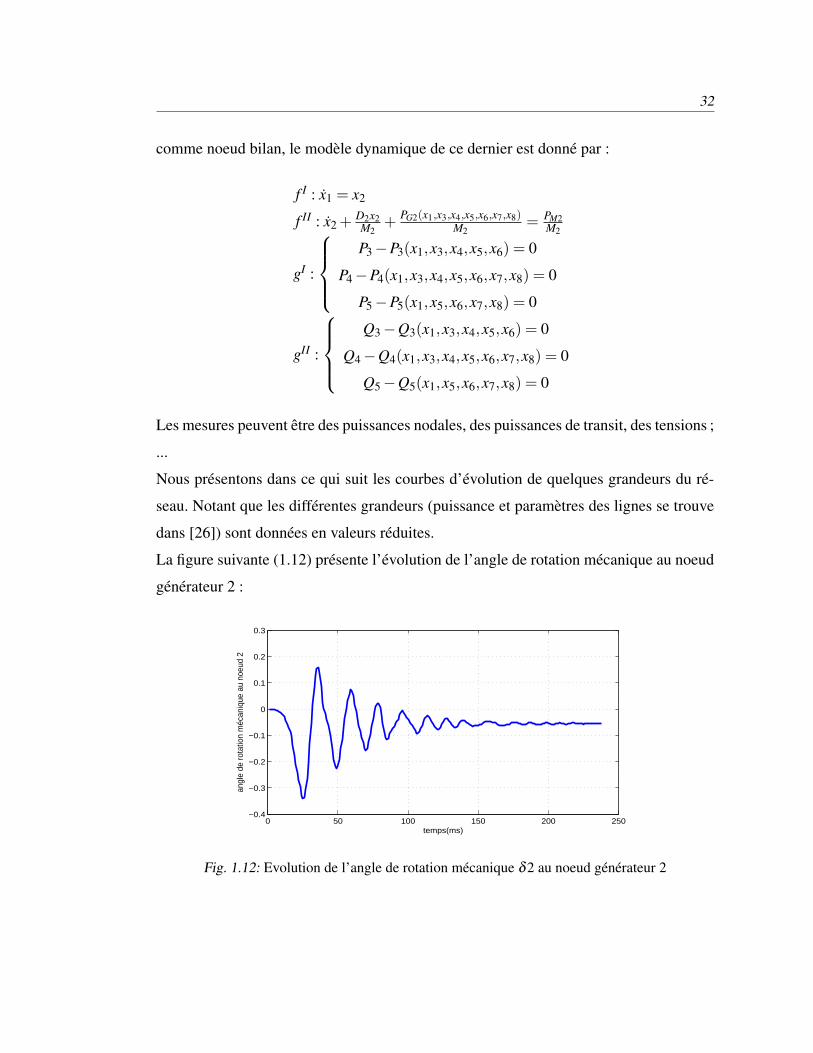
La figure suivante (1.12) présente l’évolution de l’angle de rotation mécanique au noeud
générateur 2 :
0 50 100 150 200 250−0.4
−0.3
−0.2
−0.1
0
0.1
0.2
0.3
temps(ms)
angl
e de
rota
tion
méc
aniq
ue a
u no
eud
2
Fig. 1.12: Evolution de l’angle de rotation mécanique δ2 au noeud générateur 2
33
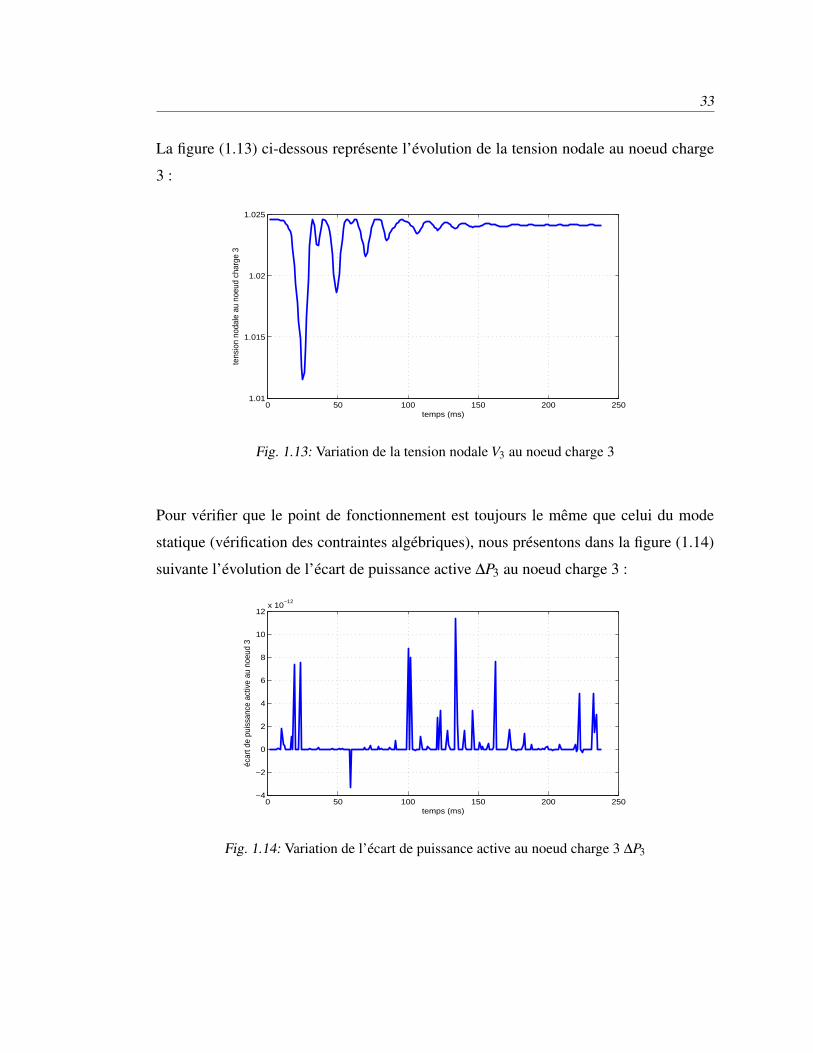
La figure (1.13) ci-dessous représente l’évolution de la tension nodale au noeud charge
3 :
0 50 100 150 200 2501.01
1.015
1.02
1.025
temps (ms)
tens
ion
noda
le a
u no
eud
char
ge 3
Fig. 1.13: Variation de la tension nodale V3 au noeud charge 3
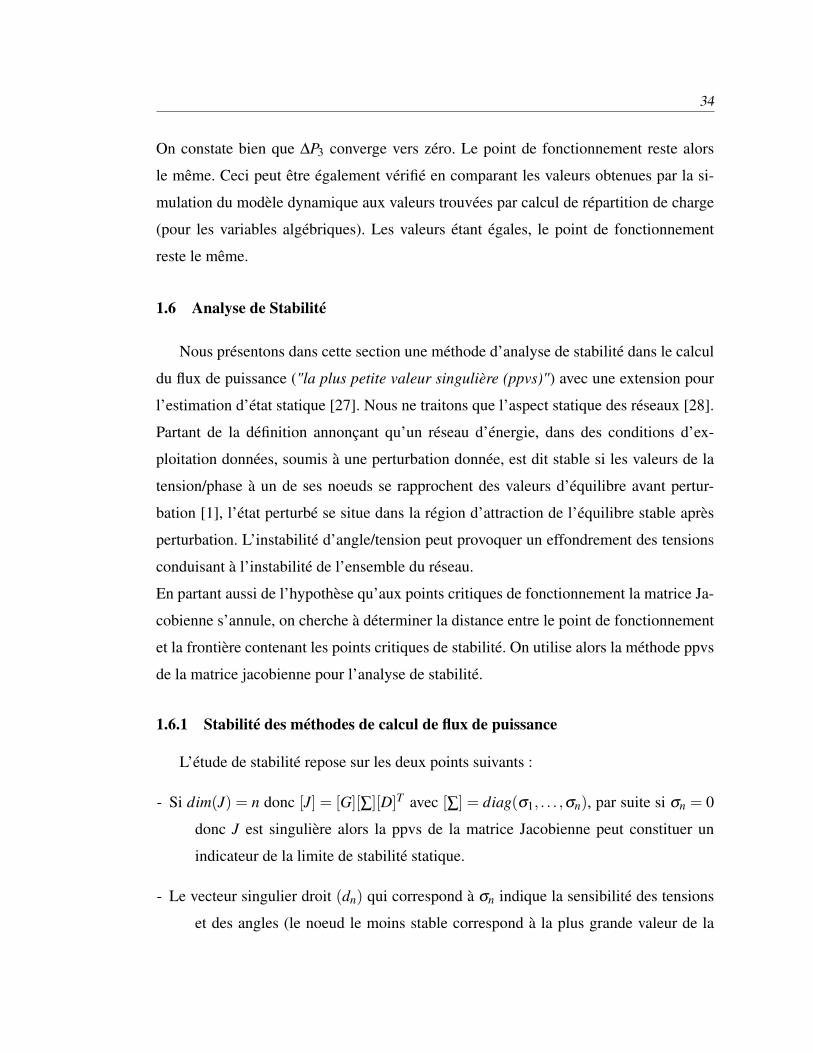
Pour vérifier que le point de fonctionnement est toujours le même que celui du mode
statique (vérification des contraintes algébriques), nous présentons dans la figure (1.14)
suivante l’évolution de l’écart de puissance active ∆P3 au noeud charge 3 :
0 50 100 150 200 250−4
−2
0
2
4
6
8
10
12x 10
−12
temps (ms)
écar
t de
puis
sanc
e ac
tive
au n
oeud
3
Fig. 1.14: Variation de l’écart de puissance active au noeud charge 3 ∆P3
34
On constate bien que ∆P3 converge vers zéro. Le point de fonctionnement reste alors
le même. Ceci peut être également vérifié en comparant les valeurs obtenues par la si-
mulation du modèle dynamique aux valeurs trouvées par calcul de répartition de charge
(pour les variables algébriques). Les valeurs étant égales, le point de fonctionnement
reste le même.
1.6 Analyse de Stabilité
Nous présentons dans cette section une méthode d’analyse de stabilité dans le calcul
du flux de puissance ("la plus petite valeur singulière (ppvs)") avec une extension pour
l’estimation d’état statique [27]. Nous ne traitons que l’aspect statique des réseaux [28].
Partant de la définition annonçant qu’un réseau d’énergie, dans des conditions d’ex-
ploitation données, soumis à une perturbation donnée, est dit stable si les valeurs de la
tension/phase à un de ses noeuds se rapprochent des valeurs d’équilibre avant pertur-
bation [1], l’état perturbé se situe dans la région d’attraction de l’équilibre stable après
perturbation. L’instabilité d’angle/tension peut provoquer un effondrement des tensions
conduisant à l’instabilité de l’ensemble du réseau.
En partant aussi de l’hypothèse qu’aux points critiques de fonctionnement la matrice Ja-
cobienne s’annule, on cherche à déterminer la distance entre le point de fonctionnement
et la frontière contenant les points critiques de stabilité. On utilise alors la méthode ppvs
de la matrice jacobienne pour l’analyse de stabilité.
1.6.1 Stabilité des méthodes de calcul de flux de puissance
L’étude de stabilité repose sur les deux points suivants :
- Si dim(J) = n donc [J] = [G][∑][D]T avec [∑] = diag(σ1, . . . ,σn), par suite si σn = 0
donc J est singulière alors la ppvs de la matrice Jacobienne peut constituer un
indicateur de la limite de stabilité statique.
- Le vecteur singulier droit (dn) qui correspond à σn indique la sensibilité des tensions
et des angles (le noeud le moins stable correspond à la plus grande valeur de la
35
composante de (dn) et le plus stable à la plus petite) et le vecteur singulier gauche
(gn) indique les directions le plus sensibles dans le comportement du système
étudié soumis à des variations ∆P,∆Q [29].
- L’analyse de la matrice Jacobienne peut être réduite par l’analyse des matrices réduites
seulement. Soit :
∆P
∆Q
=
JPθ JPV
JQθ JQV
∆θ
∆VV
En adoptant les simplifications utilisées pour le mode découplé, l’analyse de sta-
bilité des angles se traduit par l’étude de la matrice JPθ et celui des tensions par la
matrice réduite JR = JQV − JQθ .JPθ−1.JPV . On aperçoit bien que l’instabilité des
angles engendre une instabilité des tensions.
- La ppvs devient alors un indicateur de la proximité d’instabilité de tension/angle.
1.6.2 Stabilité des méthodes d’estimation d’état
Le même principe des méthodes de calcul que celui de flux de puissance est appliqué
sur les méthodes d’estimation d’état statique. La décomposition en valeur singulière
du Jacobienne H(xk) est appliquée pour la résolution de l’équation d’observateur. Pour
l’analyse de stabilité deux approches peuvent être utilisées : soit la décomposition de
H(xk) soit la décomposition de [H(xk).H(xk)T ].
1.6.3 Exemple d’application
Dans ce qui suit nous présentons une analyse de stabilité du réseau test de 13 noeuds
avec la décomposition de [H(xk).H(xk)T ] en SVD pour l’estimation d’état et la matrice
Jacobienne J pour la répartition de charge.
1.6.3.1 Répartition de charge
• Nous commençons par l’étude de la stabilité des phases et leur influence sur les
tensions (tab 1.III). Après la décomposition en svd de J, nous remarquons que la

36
plus grande valeur de dn correspond à la variable θ2 puis θ1 et la plus faible valeur
est celle de θ13. Le tableau suivant illustre les variations des grandeurs décrites ci-
dessus après ajout de perturbation de ±4% sur θ2 entre les itérations 7 et 9 (avec
SP : Sans Perturbation et AP : Avec Perturbation).
• Soient Tθ : Taux de variation des phases et TV : Taux de variation des tensions.
phase σSPi dSP
i gSPi σAP
i dAPi gAP
i Tθ TV
θ2 6.8778 0.4736 -0.4686 7.102 0.5674 -0.5023 6.43 0.05
θ1 5.6148 0.0915 -0.0856 6.4208 0.1006 -0.0973 5.75 0
θ13 0.4188 0.0161 0.00111 0.4206 0.0169 0.0021 0.1485 0
Tab. 1.III: Valeurs des grandeurs σ , d et g des phases et leur influence sur les tensions nodales
Il est claire, d’après le tableau ci-dessus, que le noeud 2 est le moins stable dans le réseau.
Ces composantes σ , d et g sont les plus élevées.
• Nous présentons dans ce qui suit une étude de stabilité des tensions (variation de
+4%) et leur influence sur les phases. Après décomposition de J en SVD, les
valeurs des grandeurs de dn sont données par le tableau suivant (tab 1.IV) :
tension σSPi dSP
i gSPi σAP
i dAPi gAP
i TV Tθ
V1 6.2194 -0.0206 0.0515 6.5623 -0.0244 0.0592 0.018 -2.2
V3 4.7079 -0.0197 0.0243 4.9108 -0.0203 0.0262 0.00001 -1.28
V13 0.0872 -0.0001 0.0001 0.0878 -0.0001 0.0001 0 -0.04
Tab. 1.IV: Valeurs des grandeurs σ , d et g des tensions et leur influence sur les phases
Une augmentation de l’ordre de perturbation (jusqu’au 28%) ne modifie pas le résultat
et la méthode utilisée peut toujours indiquer les noeuds les moins stables.
1.6.3.2 Estimation d’état
Nous étudions dans cette partie la stabilité des grandeurs estimées.
Après décomposition en svd de [H(xk).H(xk)T ] , nous remarquons que la plus grande
valeur de dn correspond à la variable θ1 puis V12 et la plus faible valeur correspond à
37
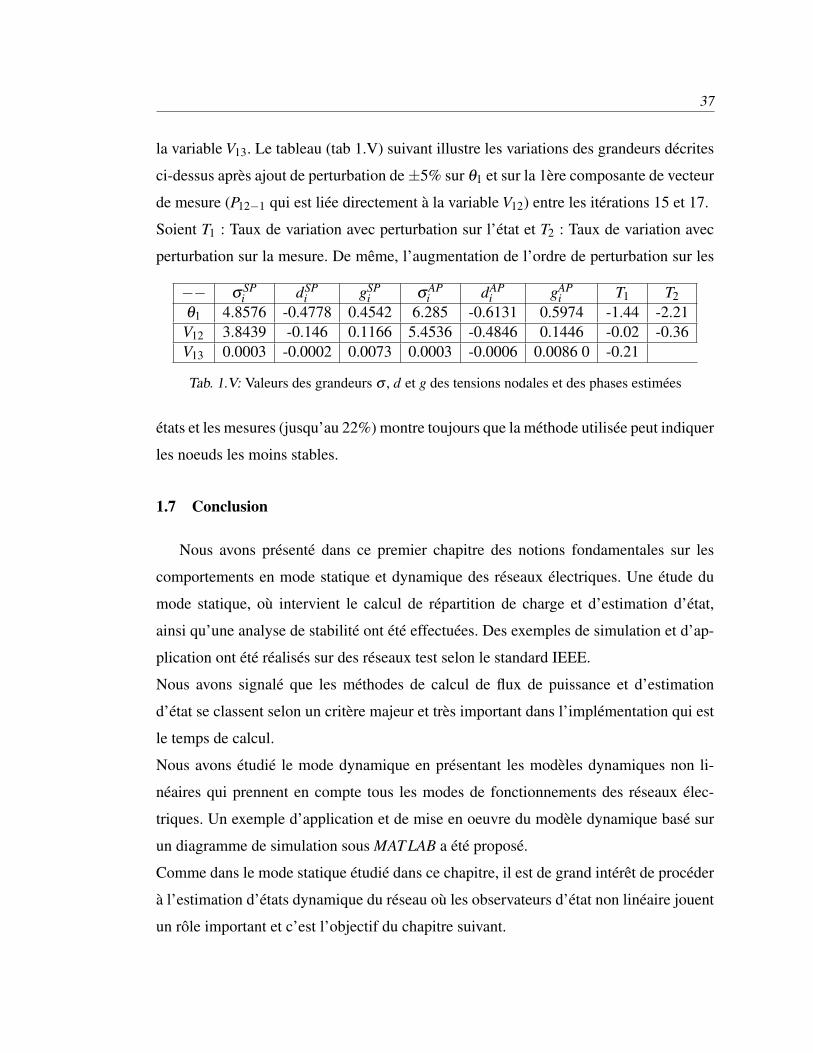
la variable V13. Le tableau (tab 1.V) suivant illustre les variations des grandeurs décrites
ci-dessus après ajout de perturbation de ±5% sur θ1 et sur la 1ère composante de vecteur
de mesure (P12−1 qui est liée directement à la variable V12) entre les itérations 15 et 17.
Soient T1 : Taux de variation avec perturbation sur l’état et T2 : Taux de variation avec
perturbation sur la mesure. De même, l’augmentation de l’ordre de perturbation sur les
−− σSPi dSP
i gSPi σAP
i dAPi gAP
i T1 T2
θ1 4.8576 -0.4778 0.4542 6.285 -0.6131 0.5974 -1.44 -2.21
V12 3.8439 -0.146 0.1166 5.4536 -0.4846 0.1446 -0.02 -0.36
V13 0.0003 -0.0002 0.0073 0.0003 -0.0006 0.0086 0 -0.21
Tab. 1.V: Valeurs des grandeurs σ , d et g des tensions nodales et des phases estimées
états et les mesures (jusqu’au 22%) montre toujours que la méthode utilisée peut indiquer
les noeuds les moins stables.
1.7 Conclusion
Nous avons présenté dans ce premier chapitre des notions fondamentales sur les
comportements en mode statique et dynamique des réseaux électriques. Une étude du
mode statique, où intervient le calcul de répartition de charge et d’estimation d’état,
ainsi qu’une analyse de stabilité ont été effectuées. Des exemples de simulation et d’ap-
plication ont été réalisés sur des réseaux test selon le standard IEEE.
Nous avons signalé que les méthodes de calcul de flux de puissance et d’estimation
d’état se classent selon un critère majeur et très important dans l’implémentation qui est
le temps de calcul.
Nous avons étudié le mode dynamique en présentant les modèles dynamiques non li-
néaires qui prennent en compte tous les modes de fonctionnements des réseaux élec-
triques. Un exemple d’application et de mise en oeuvre du modèle dynamique basé sur
un diagramme de simulation sous MAT LAB a été proposé.
Comme dans le mode statique étudié dans ce chapitre, il est de grand intérêt de procéder
à l’estimation d’états dynamique du réseau où les observateurs d’état non linéaire jouent
un rôle important et c’est l’objectif du chapitre suivant.
2
CHAPITRE 2 : ÉTAT DE L’ART SUR LESOBSERVATEURS D’ÉTAT NON LINÉAIRES
2.1 Introduction
Le but de ce chapitre est de présenter d’une part quelques rappels nécessaires pour
l’observabilité des systèmes non linéaires, et d’autre part un état de l’art sur les observa-
teurs à fin de choisir un estimateur pour les réseaux électriques.
La première partie, assez générale, est consacrée à rappeler quelques définitions et condi-
tions d’observabilité des systèmes non linéaires à temps continu et discret. Nous présen-
terons les conditions nécessaires et suffisantes garantissant l’observabilité.
La deuxième partie pose le problème de l’estimation de l’état des systèmes non linéaires.
Il s’agit de présenter les différents types d’observateurs pour les systèmes non linéaires
et de présenter une liste de techniques existantes d’estimation de l’état non linéaire. A
ce titre, nous présenterons successivement, les approches basées sur une linéarisation
du modèle au tour d’un point de fonctionnement, l’observateur de Thau, les approches
fondées sur une transformation non-linéaire ou sous forme canonique, les observateurs
à grand gain, les observateurs à entrées inconnues et l’approche LMI. Cette liste, loin
d’être exhaustive, présente les principales approches qu’on peut trouver dans la littéra-
ture.
2.2 Observabilité des systèmes non linéaires
Dans cette partie, nous allons présenter quelques définitions et des conditions pour
l’étude d’observabilité des systèmes non linéaires. On s’intéressera au deux aspects des
systèmes à temps continu et discret.

39
2.2.1 Cas des systèmes continus
Soit la représentation des systèmes non linéaires suivante :
x(t) = f (x(t),u(t))
y(t) = h(x(t))(2.1)
où : x(t) ∈ R⋉,u(t) ∈ R
⋗ et y(t) ∈ Rp. Dans ce qui suit nous allons présenter des condi-
tions géométriques et analytiques pour l’observabilité dans le cas continu et discret basée
sur les travaux de [30], [31], [32] et [33].
2.2.1.1 Conditions géométriques d’Observabilité
Le système non linéaire considéré est celui de 2.1 et soit χU[0,t](t,x0) la solution à
l’instant t du système 2.1 soumis à la commande U[0,t].
• Définition 1 :(Indiscernabilité) : Soit y0u(t) et y1
u(t) , (t ≥ 0), deux signaux de
sortie générés par l’application du signal d’entrée u(t), (t ≥ 0), au système 2.1
avec les conditions initiales x0 et x1 , respectivement. On dit que x0 et x1 sont
indiscernable ssi :
y0u(t) = y1
u(t);∀t ≥ 0
pour tout entrée u. Dans le cas contraire, on dit que x0 et x1 sont discernables.
• Définition 2 :(Observabilité) : Le système 2.1 est dit observable en x0 si x0 est
discernable de tout x ∈ R⋉. En outre, le système 2.1 est observable si ∀x0 ∈ R
⋉ ,
x0 est discernable.
• Définition 3 :(Espace d’observabilité) : l’espace d’observation pour le système
2.1 est définie comme la plus petite espace vectorielle réelle (noté par O(h)) de
C∞ fonctions contenant les composants de h et en utilisant les dérivés de Lie dans
la direction de fu := f (.,u). (aussi pour tout ϕ ∈ O(h);L f ϕ ∈ O(h) avec L fuϕ =∂ϕ∂x
f (x,u)).

40
• Définition 4 :(Observabilité par analyse de rang) : le système 2.1 satisfait la
condition d’observabilité par l’analyse du rang si :
∀x,dimdO(h)|x = n
ou dO(h)|x est l’ensemble de dϕ(x) avec ϕ ∈ O(h).
Une des méthodes les plus utilisées dans l’analyse d’observabilité au sens du rang est
celle qui se base sur les Crochets de Lie (ou dérivés de Lie) que nous présentons dans ce
qui suit :
2.2.1.2 Crochet de Lie
Soit la représentation des systèmes non linéaires suivante :
x(t) = f (x(t),u(t)) = f (x(t))+g(x(t))u(t)
y(t) = h(x(t))(2.2)
Une des méthodes d’étude d’observabilité du système 2.2 est celle de l’utilisation des
dérivés de Lie, dans ce qui suit nous présentons cette approche [34].
La dérivée de Lie d’une fonction h dans la direction de f est :
L f h = ∇h f =n
∑i=1
∂h
∂xifi (2.3)
avec : f =
f1
f2
...
fn
. Il faut noter que L f h =(
∂h∂x1
.. .. ∂h∂xn
)
.
f1
f2
...
fn
est un sca-
laire.
Conventions :
• L0f h = h

41
• L1f (h) =
∂h∂x
f et L2f (h) =
∂h∂x[L1
f (h)] f , ....
On définie par suite la matrice G, tel que (pour le cas ou h = [h1, ..,hp]) :
G =
L0f h1 ... L0
f hp
... ... ...
Ln−1f h1 ... Ln−1
f hp
(2.4)
Maintenant, on définie la matrice d’observabilité O qui est le gradient de G :
O =
dL0f h1 ... dL0
f hp
... ... ...
dLn−1f h1 ... dLn−1
f hp
(2.5)
La matrice O doit être de plein rang n pour que le système soit observable. Ainsi qu’un
autre indice d’observabilité (Indobs) peut donner et d’une façon claire le conditionnement
du système ainsi qu’une idée sur l’observabilité de chacun des états par la décomposition
en valeur singulière de la matrice O tel que : Indobs(xi) = σ i(OOT ) avec σ i est la valeur
singulière de l’état correspondant.
2.2.1.3 Conditions Analytiques d’Observabilité
• Définition 5 :(Entrée universelle) : une entrée est universelle pour le système 2.1
si :
∀x0 6= x′
0,∃τ ≥ 0 : h(χ(τ,x0)) 6= h(χ(τ,x′
0))
• Définition 6 :(Observabilité Uniforme) : un système est uniformément obser-
vable (UO) si chaque entrée est universelle.
2.2.2 Cas des systèmes discrets
Le concept d’observabilité cité précédemment peut être étendu directement à la
classe des systèmes à temps discret. Différents types de définitions ont été abordés dans

42
[35]. Nous allons étendre les propriétés présentés par [36], [37] au cas continu pour le
mode discret, soit le modèle suivant :
xk+1 = f (xk,uk)
yk = h(xk)(2.6)
où :xk ∈ Rn,uk = [u1k, . . . ,umk]
T ∈ Rm et yk ∈ R
p. Pour tout entrée uk ∈ Rm constante :
fu(xk) = f (xk,uk) est un champ de vecteur C∞ sur Rn et les hi, i = 1, . . . , p composantes
de h sont des fonctions C∞ de Rn sur R.
Soit χU[0,k−1](k,0,x0) la solution à l’instant k du système 2.6 soumis à la commande
U[0,k−1] et issue de la condition initiale à l’instant k = 0.
• Définition 7 :(Indiscrenabilité) : Deux états distincts x0, x0 ∈ Rn sont dit discer-
nables si, pour tout k ∈ N et toute séquence d’entrées admissibles U[0,k−1] , les
trajectoires h(χU[0,k−1](k,0,x0)) et h(χU[0,k−1]
(k,0, x0)) sont différentes sur leur do-
maine de définition commun. Dans ce cas, on dit que U[0,k−1] distingue les points
x0 et x0. Le système non linéaire 2.6 est dit observable en x0 ∈ Rn, si l’ensemble
des états indiscernables de x0 ne contient que x0.
• Définition 8 :(Observabilité uniforme) : Le système 2.6 est dit N-uniformément
observable en x0 ∈ Rn si, pour tout x0 ∈ R
n, tout k = 0, . . . ,N et toute séquence
d’entrée admissible U[0,k−1], il existe un entier N ∈ [n− 1,∞] et une fonction α :
R+ −→ R
+ tel que :
N
∑k=0
‖h(χU[0,k−1](k,0,x0))−h(χU[0,k−1]
(k,0, x0))‖ ≥ α‖x0 − x0‖ (2.7)
où la fonction α est continue, croissante avec α(0) = 0.
Le système 2.6 est N-uniformément observable s’il l’est pour tout xk ∈ Rn
• Définition 9 :(Observabilité au sens du rang) : Le système 2.6 est dit observable
au sens du rang en x0 ∈ Rn si :
dimdO(h)(x0) = n
43
où dO(h)(x0) est l’espace d’observabilité. Cet espace d’observabilité est défini
d’une façon numérique dans les travaux de [38] et [39].
2.3 Estimation d’état : les différents types d’observateurs
Comme la plupart des processus physiques sont décrits par des modèles mathéma-
tiques non linéaires, il est nécessaire de développer des nouvelles méthodes pour la re-
construction de l’état afin d’augmenter les performances des lois de commande pour
couvrir l’ensemble de la plage de fonctionnement. La synthèse d’observateur d’état des
systèmes non linéaires est naturellement plus difficile que celle des systèmes linéaires. A
notre connaissance il n’existe pas, à l’heure actuelle, des méthodes universelles pour la
synthèse de ces observateurs. En général, on distingue trois approches pour la synthèse
d’observateurs.
1. Les méthodes fondées sur une transformation non linéaire, basée sur l’algèbre de
Lie, permettent de mettre le système sous une forme canonique quasi-linéaire.
L’objectif est de trouver un changement de coordonnées, afin que la dynamique
de l’erreur d’estimation devienne linéaire. Une telle transformation étant faite, les
techniques d’observation des systèmes linéaires peuvent être utilisées pour esti-
mer l’état du système transformé, et donc l’état du système original en utilisant
le changement de coordonnées inverse. Des conditions nécessaires et suffisantes
pour un système non linéaire transformé sous une forme canonique ont été établies
dans [40] et [41].
2. Des méthodes sont basées sur une linéarisation du modèle autour d’un point de
fonctionnement. C’est par exemple le cas du filtre de Kalman étendu et de l’ob-
servateur de Luenberger étendu. Malgré la restriction à la convergence locale de
cette méthode, elle est largement utilisée dans la pratique et donne généralement
des bons résultats.
3. Observateurs à grand gain : Un observateur de type grand gain est synthétisé pour
une classe de systèmes non-linéaires uniformément observables [42]. Le principe

44
repose sur l’introduction d’un gain d’observation qui dépend d’un paramètre θ .
Le nom "grand gain" est dû au fait que le gain de l’observateur est suffisamment
grand pour affaiblir la non-linéarité du système. Notons cependant qu’avec l’ob-
servateur à grand gain, le choix d’un paramètre θ suffisamment grand assure une
convergence sûre et rapide, avec en contre partie une grande sensibilité au bruit
d’observation.
D’autres types d’observateurs ont été proposés récemment. Citons d’abord l’observateur
de Luenberger généralisé [43] qui consiste à ajouter à l’observateur de Luenberger un
deuxième gain à l’intérieur de la partie non linéaire du système. Citons également les
techniques d’observation basées sur la théorie de la contraction comme outil d’analyse
de la convergence entre l’observateur et le modèle [44], [45].
Nous allons présenter dans ce qui suit : le Filtre de Kalman Etendu, Observateur de
Thau et ses généralisations, l’approche LMI et les observateurs à entrée inconnues.
2.3.1 Filtre de Kalman Etendu
Le filtre de Kalman étendu [46] est l’une des techniques d’estimation les plus utili-
sées et qui était largement étudiées dans le domaine d’estimation de l’état des systèmes
dynamiques non linéaires. Le filtre de Kalman étendu est une extension directe du filtre
de Kalman standard en remplaçant les matrices d’état et de sortie du système linéaire par
les jacobéennes des non-linéarités du système en question.
Soit le système non linéaire suivant :
xt = f (xt ,ut)+ vt
yt = h(xt ,ut)+wt
(2.8)
45
avec : vt et wt sont respectivement bruit sur le système et les mesures.
les équations du filtre sont les suivantes :
˙x(t) = f (x(t),u(t))+PH(x(t),u(t))R−1(y(t)−h(x(t),u(t)))
P = F(x(t),u(t))P+PF(x(t),u(t))T +Q−PH(x(t),u(t))T R−1H(x(t),u(t))P(2.9)
ou : F(x(t),u(t)) = ∂ f∂x(x,u)|x=x et H(x(t),u(t)) = ∂h
∂x(x,u)|x=x
Pour le cas discret, où le système est représenté comme suit :
xk+1 = f (xk,uk)+Gkvk
yk = h(xk,uk)+Dkwk
(2.10)
le E.K.F s’exprime comme suit :
xk+1 = xk+1/k +Kk+1ek+1
Pk+1 = (Ind+na−Kk+1Hk+1)Pk+1/k
xk+1/k = f (xk)
Pk+1/k = FkPkFTk +Qk
(2.11)
avec :
Kk+1 = Pk+1/kHTk+1(Hk+1Pk+1/kHT
k+1 +Rk+1)−1
ek+1 = yk+1 −h(xk+1/k)(2.12)
2.3.2 Observateur de Thau
l’Observateur de Thau [47] ou appelé encore "Observateur de Lipschitz" considère
la forme spéciale suivante du système non linéaire :
x = Ax+ f (x)+Bu
y =Cx(2.13)
avec A, B, C et f (.) sont connues et (y,u) sont aussi connues.
Si la paire (A,C) est observable, donc il existe une matrice K tel que les valeurs propres
de A0 = A−KC se situent dans le demi-plan gauche. L’observateur de Thau est défini

46
alors comme suit :
˙x = Ax+ f (x)+Bu+K(y− y)
y =Cx(2.14)
On définie ensuite l’erreur d’observateur tel que :K(y− y) =−KCe avec e = x− x.
L’expression de l’équation de l’erreur dynamique est :
e = (A−KC)e+ f (x)− f (x) = A0e+ f (x)− f (x) (2.15)
Soit A0 est stable, donc pour toute matrice Q définie positive, il existe une matrice P
définie positive et unique tel que l’équation de Lyapunov suivante est établi :
AT0 P+PA0 =−2Q (2.16)
d’ou, le choix du gain K se base sur le théorème suivant :
Théorème 2.3.1. Si on choisit K tel que A0 peut donné une solution de l’équation de
Lyapunov et satisfaisant :λmin(Q)
‖P‖> L (2.17)
où : L est la constante de Lipschitz vérifiant : ‖ f (x1)− f (x2)‖< L‖x1−x2‖ pour tout x1
et x2, donc l’observateur de Thau est asymptotiquement stable.
Démonstration :
On définie la fonction candidate de Lyapunov suivante :
V = eT Pe
la dérivée de V , évaluée tout au long de la solution de l’erreur dynamique est :
V = eT Pe+ eT Pe= eT (AT
0 P+PA0)e+2eT P[ f (x)− f (x)]
=−2eT Qe+2eT P[ f (x)− f (x)](2.18)

47
En utilisant la condition de Lipschitz, on a :
V
≤−2eT Qe+2L‖e‖‖P‖‖e‖
≤ −2λmin(Q)‖e‖2 +2L‖e‖‖P‖‖e‖
≤ −2[λmin(Q)−L‖P‖]‖e‖2
(2.19)
Si λmin(Q)> L‖P‖ (doncλmin(Q)‖P‖ > L), V < 0.
e = 0 est un point d’équilibre asymptotiquement stable et :
limt−→∞
e = 0
Exemple Numérique :
Soit le système non linéaire suivant :
x1
x2
=
0 1
0 0
x1
x2
+
0
−sin(x1)
+
0
0
u
y =(
1 1
)
x1
x2
La constante de Lipschitz pour f (x) = sin(x1) est L = 1. La sortie est y = sin(x) est
donnée par la figure suivante :
Fig. 2.1: Evolution de la sortie y = sin(x)
On remarque d’aprés la figure 2.1 que la valeur maximale deλmin(Q)‖P‖ est établie lorsque

48
Q = I, donc nous allons chercher A0 tel que :
AT0 P+PA0 =−2I
et 1‖P‖ > 1 avec :
‖P‖2 =n
∑i, j=1
p2i j = tr(PT P)
On choisit P =
12
−14
−14
13
, donc : P = PT > 0 et ‖P‖= 0.68 < 1.
et soit A0 =
−1 0
−1 −1
, ici nous avons λmax(P) = 1;809 > 1 d’où la condition n’est
pas satisfaite ce qui montre la difficulté de cette approche et par suite que cette méthode
n’est pas constructive.
Cette approche a été étendue par plusieurs auteurs [48] qui ont simplifié la problème
en remplaçant la matrice Q par une matrice identité In. Une méthode basée sur des ob-
servateurs exponentiels a été proposée par [49]. Par ailleurs, une méthode constructive a
été proposée par [50].
2.3.3 Observateur sous forme canonique
Cette approche est fondée sur une transformation non-linéaire, basée sur l’algèbre de
Lie et qui permet de mettre le système sous une forme canonique [40],[51].
Soit le système non linéaire décrit par les équations suivantes :
x = f (x)
y = h(x)(2.20)
L’observabilité de tel système non linéaires est indépendante de l’entrée u. f et h sont des
fonctions C∞, il existe alors une transformation non linéaire x = T (z) tel que le système
49
2.20 peut être transformé sous forme observable suivante :
z =
0 0 . . . 0
1 . . . . . ....
0. . . . . . 0
0 0 1 0
z−
f0(zn)
f1(zn)...
fn−1(zn)
y =(
0 . . . 0 1
)
z = zn
(2.21)
Donc, l’observateur a la forme suivante :
˙z =
0 0 . . . 0
1 . . . . . ....
0. . . . . . 0
0 0 1 0
z−
f0(zn)
f1(zn)...
fn−1(zn)
−K(y− y)
y =(
0 . . . 0 1
)
z = zn
(2.22)
avec : K =[
k0 . . . kn−1
]
L’erreur dynamique de l’observateur (e = z− z) est :
e =
0 0 . . . 0
1 . . . . . ....
0. . . . . . 0
0 0 1 0
e−
k0
k1
...
kn−1
en =
0 0 . . . −k1
1 . . . . . ....
0. . . . . .
...
0 . . .. . . −kn−2
0 0 1 −kn−1
e (2.23)
Donc, le polynôme caractéristique est :
p(s) = k0 + k1s+ . . .+ kn−1sn−1 + sn (2.24)
Le choix du gain K revient donc à que le polynôme p(s) soit stable donc e −→ 0.
Le problème maintenant est de trouver une transformation x = T (z) ?

50
On rappelle tout d’abord la matrice d’observabilité Θ basée sur les dérivés de Lie :
Θ =[
L0f (dh)(x) L1
f (dh)(x) . . . Ln−1f (dh)(x)
]
(2.25)
la dernière colonne de Θ−1 est ∂T∂ z1
, ce qui donne :
∂T
∂ zk
=
(
adk−1 f ,∂T
∂ z1
)
(2.26)
avec : (adk f ,g) = [ f ,(adk−1 f ,g)] et (ad1 f ,g) = [ f ,g] = ∂ f∂x
g− ∂g∂x
f .
Exemple Numérique :
Soit le système non linéaire suivant :
x1
x2
x3
=
x2
x3 + sin(x1)
x2 + x3
y = x1
La matrice d’observabilité Θ est la suivante :
Θ =
L0f (dh)(x)
L1f (dh)(x)
L2f (dh)(x)
=
1 0 0
0 1 0
cos(x1) 0 1
il est facile de déduire que : ∂T∂ z1
=
0
0
1
, ce qui donne :
∂T
∂ z= [(ad0 f ,
∂T
∂ z1),(ad1 f ,
∂T
∂ z1),(ad2 f ,
∂T
∂ z1)] =
0 0 1
0 1 1
1 1 2

51
donc on déduit la transformation tel que :
x =
0 0 1
0 1 1
1 1 2
z
ce qui nous permet d’écrire :
f1
f2
f3
=
0 0 1
0 1 1
1 1 2
−1
x2
x3 + sin(x1)
x2 + x3
=
sin(z3)
z3 + sin(z3)
z3
la nouvelle forme observable est :
z1
z2
z3
=
0 0 0
1 0 0
0 1 0
z+
sin(z3)
z3 + sin(z3)
z3
y = z3
L’observateur donc est :
˙z1
˙z2
˙z3
=
0 0 0
1 0 0
0 1 0
z+
sin(z3)
z3 + sin(z3)
z3
−
k1
k2
k3
(z3 − z3)
y = z3
par suite on peut déterminer le polynôme caractéristique et calculer le gain K.
2.3.4 Observateur à Grand Gain
Cet observateur non linéaire est proposé par J. P.Gauthier, H. Hammouri et S. Oth-
man dans [42], il peut être considéré comme une généralisation de l’observateur à mode
glissant, il ne nécessite pas une linéarisation autour d’un point de fonctionnement du
système non linéaire et sa convergence est démontrée théoriquement.
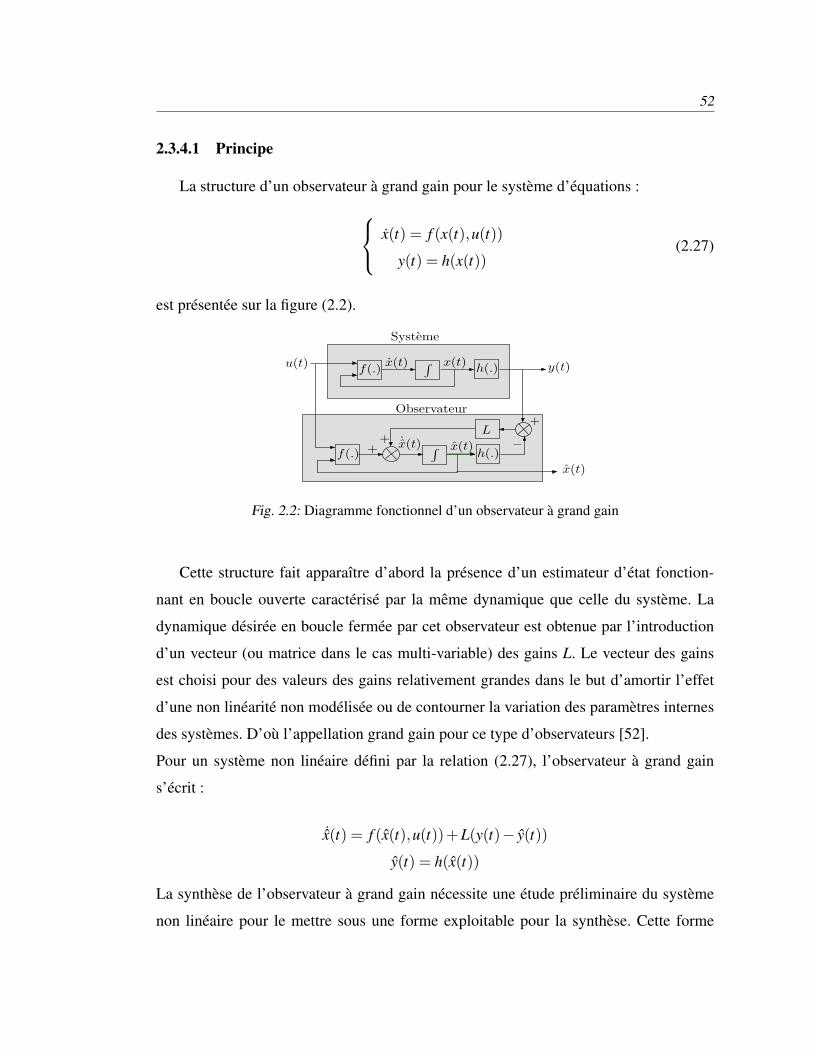
52
2.3.4.1 Principe
La structure d’un observateur à grand gain pour le système d’équations :
x(t) = f (x(t),u(t))
y(t) = h(x(t))(2.27)
est présentée sur la figure (2.2).
f(.)∫
h(.)u(t) y(t)x(t)x(t)
Systeme
f(.)∫
h(.)x(t)˙x(t)
L+
+
+
−
x(t)
Observateur
Fig. 2.2: Diagramme fonctionnel d’un observateur à grand gain
Cette structure fait apparaître d’abord la présence d’un estimateur d’état fonction-
nant en boucle ouverte caractérisé par la même dynamique que celle du système. La
dynamique désirée en boucle fermée par cet observateur est obtenue par l’introduction
d’un vecteur (ou matrice dans le cas multi-variable) des gains L. Le vecteur des gains
est choisi pour des valeurs des gains relativement grandes dans le but d’amortir l’effet
d’une non linéarité non modélisée ou de contourner la variation des paramètres internes
des systèmes. D’où l’appellation grand gain pour ce type d’observateurs [52].
Pour un système non linéaire défini par la relation (2.27), l’observateur à grand gain
s’écrit :
˙x(t) = f (x(t),u(t))+L(y(t)− y(t))
y(t) = h(x(t))
La synthèse de l’observateur à grand gain nécessite une étude préliminaire du système
non linéaire pour le mettre sous une forme exploitable pour la synthèse. Cette forme

53
exige que le système appartienne à la classe des systèmes non linéaires vérifiant la pro-
priété de l’observabilité uniforme.
2.3.4.2 Etude préliminaire
Pour ce faire, on considère le système non linéaire mono-variable suivant :
Σ0 :
z(t) = f (z(t),u(t))
y(t) = h(z(t)(2.28)
avec :
z(t) =
z1
z2
...
zn
∈ Rn;u(t) ∈ R;y(t) ∈ R
Dans le but de faciliter la reconstruction du vecteur d’état, on procède à un change-
ment des coordonnées qui permet d’exprimer la sortie mesurée du système en fonction
seulement de la première composante du vecteur d’état. La construction de la totalité du
vecteur d’état peut être réalisée par des dérivées successives de la sortie. La représenta-
tion résultante est dite forme canonique d’observabilité uniforme.
Donc, pour obtenir ceci, on pose :
x1(t) = y(t) = h(z(t))
x2(t) = x1(t) = y(t) = L f h(z(t))
x3(t) = L2f h(z(t))
...
xn(t) = xn−1(t) = Ln−1f h(z(t))
(2.29)
Par le changement des coordonnées considéré, la dynamique du système Σ0 se réécrit
dans les nouvelles coordonnées comme suit :
Σt :
x(t) = Ax(t)+ϕ(x(t),u(t))
y(t) =Cx(t) = x1(t)(2.30)

54
avec :
x(t) =
x1
x2
...
xn
∈ Rn;A =
0 1 · · · 0...
. . .. . .
...
0 · · · · · · 1
0 · · · · · · 0
;ϕ(x(t),u(t)) =
0...
0
Lnf h(z(t))
Remarque :
La représentation sous la forme canonique d’observabilité exige les conditions suivantes :
1. Le changement des coordonnées, Φ , réalise une bijection afin de pouvoir recons-
truire le vecteur d’état initial, avec Φ est telle que :
Φ : Rn → Rn
z(t) 7→ x(t) = Φ(z(t),u(t)) =
h(z(t))
L f h(z(t))...
Ln−1f h(z(t))
2. La sortie y(t) doit être (n−1) dérivable.
Par conséquent, l’observation du système Σ0 est conditionnée par l’hypothèse globale,
(l’hypothèse 1), suivante :
Hypothèse 1
La fonction Φ(z(t),u(t)) doit être un diffeomorphisme.
2.3.4.3 Equation de l’Observateur
Si le système Σ0 vérifie l’hypothèse (hypothèse 1), un observateur relatif au système
Σt est de la forme [42],[52] :
˙x(t) = Ax(t)+ϕ(x,u)−θ∆−1θ S−1CTC(x− x) (2.31)

55
avec :
description
•
∆θ = diag[
1 1θ · · · 1
θ n−1
]
;θ ≥ 1;
• la matrice S est une matrice symétrique définie positive, solution de l’équation
algébrique de Lyapunov :
S+AT S+SA−CTC = 0 (2.32)
La structure de l’observateur ainsi adoptée est un observateur à grand gain à convergence
exponentielle c’est à dire :
∃t0 ≥ 0 tel que ∀t ≥ t0 ; ∀x(0) ∈ Rn ; ∃λ ,µθ > 0 tel que :
‖x(t)− x(t)‖ ≤ λe−µθ ‖x(0)− x(0)‖
Remarques
• L’expression du vecteur gain, θ∆−1θ S−1CT , est obtenue à partir de l’article d’ori-
gine de l’observateur à grand gain [42] où Gauthier a énoncé le premier observa-
teur à grand gain ayant la structure suivante :
˙z(t) = Az(t)+ϕ(z(t),u(t))−S−1∞ CTC(z(t)− z(t))
avec S∞ est la matrice définie positive solution de l’équation :
θS∞ +S∞A+AT S∞ −CTC = 0 (2.33)
Donc, en comparant les deux équations de l’observateur, on peut remarquer que le
vecteur gain de l’observateur à grand gain a été décomposé où on a considéré :

56
S∞ =1
θ∆θ S∆θ
avec S est la solution de l’équation (2.33)pour θ = 1. Ceci peut être facilement
vérifier.
• Dans le théorème précédent, ∆−1θ S−1CT peut être remplacée par
L1θ...
Lnθ n
où L1, . . . ,Ln sont tels que les valeurs propres de la matrice A−LC sont à parties
réelles négatives.
Démonstration :
On note par x, le vecteur d’erreurs entre les deux vecteurs d’état estimé et réel, telle que
x = x(t)− x(t).
On a :
˙x(t) = Ax(t)−θ∆−1θ S−1CTCx(t)+ϕ(x(t)u(t))−ϕ(x(t),u(t))
On peut facilement vérifier que : ∆θ A∆−1θ = θA et C∆θ =C. En effet, on a :
∆θ A∆−1θ =
1 0 · · · 0
0 1θ
. . ....
.... . .
. . . 0
0 · · · 0 1θ n−1
.
0 1 · · · 0...
. . .. . .
......
. . . 1
0 · · · · · · 0
.
1 0 · · · 0
0 θ. . .
......
. . .. . . 0
0 · · · 0 θ n−1
= θA
En posant x(t) = ∆θ x(t), alors on obtient :
˙x(t) = θAx(t)−θS−1CTCx(t)+∆θ (ϕ(x(t),u(t))−ϕ(x(t),u(t)))
On définit une fonction candidate de Lyapunov V (x, t) = xT (t)Sx(t), sa dérivée par

57
rapport au temps V (x, t) peut être obtenue comme suit :
V (x, t) =
2xT S ˙x
2θ xT SAx−2θ xTCTCx+2xT S∆θ (ϕ(x,u)−ϕ(x,u))
−θV +θ xTCTCx+2xT S∆θ (ϕ(x,u)−ϕ(x,u))−2θ xTCTCx
En utilisant (2.32), la dérivée V (x, t) s’écrit sous la forme suivante :
V (x, t) =−θV +2θ(1
2xTCTCx− xTCTCx)+2xT S∆θ (ϕ(x,u)−ϕ(x,u))
≤−θV +2xT S∆θ (ϕ(x,u)−ϕ(x,u))(2.34)
Le signe V (x, t) dépendra de celui de :
xT S∆θ (ϕ(x,u)−ϕ(x,u))
Si on considère l’hypothèse (Assumption 2) suivante :
Hypothèse
La fonction ϕ(x(t),u(t)) est lipschitizienne en x c’est à dire : ∃c> 0;∀(m,n)∈ (Rn)2;‖ϕ(m)−
ϕ(n)‖ ≤ c‖m−n‖.
Pour θ ≥ 1, on déduit :
‖∆θ (ϕ(x,u)−ϕ(x,u))‖ ≤ ξ0‖x‖ (2.35)
où ξ0 est une constante positive indépendante de θ . D’après l’inégalité (2.35), l’inégalité
(2.34) devient :
V≤−θV +2λmax(S)‖x‖ξ0‖x‖
≤ −(θ − c1)V
où c1 = 2ξ0
λminavec λmin représente la plus petite valeur propre de S. Maintenant, si
on prend θ0 = max1,c1 et en remarquant que pour θ ≥ 1 on a
‖x(t)‖ ≤ ‖z(t)‖ ≤ θ n−1‖x(t)‖, alors, on peut déduire :

58
‖x(t)‖ ≤ θ n−1e[− (θ − c1
2t]‖x(0)‖
C’est facile de remarquer que λ = θ n−1,µθ = θ−c12
. Ce qui prouve la convergence
exponentielle de l’observateur à grand gain.
2.3.4.4 Equations de l’observateur dans les coordonnées originales
Puisque Φ est un difféomorphisme, les coordonnées originales z(t) sont obtenues
par :
z(t) = Φ−1(x(t))
D’après [53], l’observateur (2.31) s’écrit dans les coordonnés originales z(t) de la façon
suivante :
˙z(t) = f (z,u)−θ(∂Φ
∂(u, z))−1∆−1
θ S−1CTCz(t) (2.36)
avec z(t) est l’état estimé et z(t) = z(t)− z(t) est l’erreur d’estimation.
Des nombreuses approches proposées dans la littérature utilisent les observateurs à grand
gain : on cite [54] qui ont étendu les résultats précédents aux observateurs d’ordre réduit
et [55] qui ont synthétisé un observateur à grand gain adaptatif pour les systèmes non
linéaires à paramètres inconnus.
2.3.5 Observateur à entrée inconnue
Peu de travaux ont été réalisés pour étendre les méthodes des observateurs des sys-
tèmes non linéaires aux systèmes singuliers qui permettent généralement de décrire les
systèmes non linéaires à entrées inconnues. Boutayeb et al. [56] ont proposé une mé-
thode de synthèse d’observateur d’ordre plein pour un système non linéaire singulier.
Les conditions d’existence de l’observateur assurant la stabilité locale y sont données.
Cette approche n’utilise pas de transformation particulière et généralise les résultats pro-
posés dans [57] et [47].
Nous détaillons dans ce qui suit cette approche.

59
Soit le système singulier suivant :
Ex(t) = f (x(t))
y(t) = h(x(t))(2.37)
où : x(t) ∈ Rn, y(t) ∈ R
m, f une fonction de Rn 7−→ R
q et E une matrice de Rq×n.
On introduit la structure générale d’observateur suivante :
z(t) = g(z(t),y(t))
x(t) = z(t)+Qy(t)(2.38)
où : z(t) ∈ Rn, g :∈ R
n ×Rp 7−→ R
n et Q ∈ Rn×p.
Les conditions de convergence de l’erreur d’observation e = x−x vers zéro sont présen-
tées dans le théorème ci-dessous [56].
Théorème 2.3.2. Soit la classe de systèmes 2.37 et l’observateur 2.38. Si les hypothèses
suivantes sont vérifiées :
• rang
E
H
= n où H = ∂h∂x(0).
• la paire (PF,H) est détectable où F = ∂ f∂x(0).
Alors l’observateur 2.38 garantit que :
limt−→∞
(x(t)− x(t)) = 0
avec :
g(z,y) = P f (x)+L(x,y)
L(x,h(x)) = 0(2.39)
Démonstration :
Comme la matrice
E
H
est de plein rang colonne, il existe une matrice non-singulière

60
P Q
a b
telle que :
P Q
a b
E
H
=
In
0
(2.40)
D’après l’approximation locale y=Hx et l’expression PE+QH = In donnée par 2.40,on
obtient :
e = z−Qy− x = z−PEx
la dynamique de l’erreur a pour expression :
e = z−PEx = P f (x)−P f (x)+L(x,h(x)) = P f (e+x)−P f (x)+L(e+x,h(x)) (2.41)
En utilisant 2.40, l’équation 2.41 se réécrit :
e = P f (e+ x)−P f (x)+L(e+ x,h(x))−L(e+ x,h(x+ e)) (2.42)
ou encore :
e = (PF −KH)e (2.43)
avec : F = ∂ f∂x(0), H = ∂h
∂x(0), K = ∂L(e+x,h(x))
h(x) |x=0,e=0. Il apparait maintenant que si la
deuxième condition du théorème est satisfaite, alors on peut trouver une matrice K telle
que le vecteur d’erreur d’estimation converge vers zéro.
2.3.6 Approche LMI
Malgré l’intérêt porté, durant ces dernières années, au problème d’observation de
l’état des systèmes non linéaires, peu d’attention a été prêtée aux systèmes à temps dis-
cret. Dans cette section, nous abordons le problème de synthèse d’observateurs d’état
des systèmes non linéaires lipschitziens à temps discret qui est basé sur la résolution des
LMIs garantissant la stabilité et la convergence d’observateur [36].
61
Soit le système suivant :
xk+1 = Axk + f (xk,uk)
yk =Cxk
(2.44)
où : xk ∈ Rn,uk ∈ R
m,yk ∈ Rp, A et C sont deux matrices d’ordre approprié.
f : Rn ×Rn −→ R
n est lipschitizienne :
‖ f (x1,u)− f (x2,u)‖ ≤ γ‖x1 − x2‖ (2.45)
avec :x1,x2 ∈ Rn,γ > 0.
L’observateur de Luenberg s’écrit :
xk+1 = Axk + f (xk,uk)+L(yk −Cxk)
yk =Cxk
(2.46)
Soit l’erreur d’estimation : εk = xk − xk, en utilisant 2.44 et 2.46 nous avons :
εk+1 = (A−LC)εk +∆ fk (2.47)
avec ∆ fk = f (xk,uk)− f (xk,uk).
Le problème revient à déterminer le gain L assurant la convergence asymptotique de ε
vers 0. La synthèse de l’observateur (détermination du gain) est donnée par le théorème
suivant [58] :
Théorème 2.3.3. L’erreur d’estimation converge asymptotiquement vers l’origine s’il
existe deux matrices P = PT > 0 et R de dimensions appropriées et un scalaire positif τ
tel que la LMI suivante soit satisfaite :
−P+ τγ2In AT P−CT R AT P−CT R
(⋆) P− τIn 0
(⋆) (⋆) −P
< 0 (2.48)
le gain L est donné par L = P−1RT

62
Démonstration :
On considére la fonction de Lyapunov quadratique suivante :V (εk) = εTk Pεk. La variation
de cette fonction est :
∆V = εTk [(A−LC)T P(A−LC)]εk +2εT
k (A−LC)T P∆ fk +∆ f Tk P∆ fk
ou : ∆V =V (εk+1)−V (εk)
La fonction de Lyapunov proposée garantit la stabilité asymptotique de ε vers 0, si :
1. V (εk)> 0 pour tout εk 6= 0.
2. ∆V < 0 pour toute trajectoire possible de 2.47.
Vérfication des conditions :
1. Pour la première condition V (εk) > 0, elle est vérifiée puisque P est définie posi-
tive.
2. ∆V < 0 :
Nous avons : ∆V = [εTk ∆ f T
k ]Ω
εk
∆ fk
avec :
Ω =
(A−LC)T P(A−LC)−P (A−LC)T P
P(A−LC) P
D’autre part, d’aprés la condition de Lipscitz 2.45, nous déduisons : ∆ f Tk ∆ fk <
γ2εTk εk, ce qui est équivalent à :
Γ =[
εTk ∆ f T
k
]
−γ2In 0
0 In
εk
∆ fk
≤ 0 (2.49)

63
et comme le scalair Γ est négatif ou nul, alors :
∆V ≤ ∆V − τΓ =[
εTk ∆ f T
k
]
Ω− τ
−γ2In 0
0 In
εk
∆ fk
explicitement, on a :
Ωτ =Ω−τ
−γ2In 0
0 In
=
(A−LC)T P(A−LC)−P+ τγ2In (A−LC)T P
P(A−LC) P− τIn
Finalement en utilisant le complément de Schur et la notation PL = RT , l’inégalité
Ωτ < 0 est équivalente à 2.48.
Une amélioration de cette synthèse d’observateur est donné par [36], qui se base sur la
définition de deux nouvelles fonctions de Lyapunov, dont nous présentons le théorème
qui fourni des conditions de synthèse d’observateur moins restrictive que celui 2.48.
Théorème 2.3.4. ε converge asymptotiquement vers l’origine, s’il existe des scalaires
ε > 0,α > 0 et β ∈R et des matrices P= PT > 0, Q=QT et R de dimension appropriées
tel que les inégalités suivantes soient satisfaites :
−P+βQ+(1+ ε)αγ2In < 0
ε1+ε P− β
1+ε Q AT P−CT R AT P−CT R
PA−RTC P−αIn 0
PA−RTC 0 −P
< 0(2.50)
2.4 Conclusion
Ce deuxième chapitre présente des notions fondamentales sur l’observabilité et les
observateurs non linéaires. En prenant en considération le rôle central joué par les ob-
servateurs non linéaires dans la suite de nos travaux de recherche servant de choisir
l’une des techniques présentées pour l’estimation d’état des réseaux électriques (utili-
sation du Filtre de Kalman Etendu). Nous avons tout d’abord présenté un état de l’art
64
sur les différentes techniques d’estimation de l’état. Un état de l’art regroupe la plupart
des techniques de conception d’observateurs pour les systèmes non linéaires à temps
continu et discret. Pour cette classe générale de systèmes, nous avons vu qu’il n’existe
pas, à l’heure actuelle, de méthode universelle pour la synthèse d’observateurs. Les ap-
proches développées à ce jour sont soit une approximation des algorithmes linéaires, soit
des algorithmes non linéaires spécifiques pour certaines classes de systèmes.
3
CHAPITRE 3 : ESTIMATION D’ÉTAT ETDIAGNOSTIC DES RÉSEAUX ÉLECTRIQUES HT
3.1 Introduction
Dans ce chapitre nous traitons deux problèmes : l’estimation d’état et le diagnostic
des réseaux électriques. L’estimation d’état sera assurée par l’application de filtre du
Kalman étendu (utilisé comme estimateur E.K.E) sur un modèle dynamique transformé
des réseaux que nous détaillerons dans une première partie. Dans une deuxième partie,
la détection, la localisation et l’estimation des défauts est assurée à travers une nouvelle
approche que nous proposons basée sur l’ajout d’une fenêtre des mesures au F.K.E ainsi
qu’une version améliorée avec des entrées inconnues pour l’isolation et l’estimation des
défauts. Un algorithme regroupant les différentes étapes sera proposé.
3.2 Modélisation dynamique du réseau
3.2.1 Transformation du modèle dynamique du réseau
Dans le chapitre 1, nous avons présenté le modèle dynamique d’un réseau électrique
sous forme DAE, dans ce qui suit nous allons proposer quelques transformations afin de
le rendre sous forme ODE de base. La forme générale du modèle de DAE est donnée
comme suit :
xd(t) = F(xd(t),xa(t),u(t))
0 = g(xd(t),xa(t))
y(t) = h(xd(t),xa(t))
(3.1)
Avec : xd(t) ∈ Rnd , xa(t) ∈ R
na sont respectivement les variables d’états dynamiques
et algébriques, F(.) ∈ Rnd une fonction représentant les équations différentielles non
linéaires, g(.) ∈ Rna représente les contraintes (équations) algébriques non linéaires,
u(t) ∈ Rp la commande et y(t) ∈ R
m la sortie du système. Le problème posé par le
66
système (3.1) est que xa(t) n’apparaît pas explicitement. Pour le faire apparaître, on dif-
férentie les contraintes g(xd(t),xa(t)) par rapport au temps :
0 = gxd(xd(t),xa(t))xd(t)+gxa
(xd(t),xa(t))xa(t)
0 = gxd(xd(t),xa(t))F(xd(t),xa(t),u(t))+gxa
(xd(t),xa(t))xa(t)(3.2)
Ou gxd(xd(t),xa(t)) =
∂g(xd(t),xa(t))∂xd(t)
et gxa(xd(t),xa(t)) =
∂g(xd(t),xa(t))∂xa(t)
sont deux matrices
d’ordre approprié.
3.2.1.1 Modèle Dynamique Ordinaire (O.M)
Si autour d’un point de fonctionnement gxa(xd(t),xa(t)) est inversible [59], alors le
système algébro-différentiel 3.1 peut s’écrire sous la forme explicite (Modèle Ordinaire
O.M) :
xd(t) = F(xd(t),xa(t),u(t))
xa(t) = −g−1xa(xd(t),xa(t))gxd
(xd(t),xa(t))F(xd(t),xa(t),u(t))(3.3)
En conclusion, on a différentié une fois le système algébro-différentiel 3.1 pour obtenir
un système explicite : on dit que le système algébro-différentiel est d’indice 1 [60]. Une
étude de la nature et de la stabilité de ce type de système est donnée par [61]. Il faut noter
que :
gxa(xd,xa) =
∂g(xd ,xa)∂xa
=
gxa1 gxa2
gxa3 gxa4
≃ [J] =
j1 j2
j3 j4
(3.4)
où [J] est la matrice Jacobienne utilisée dans le calcul du Load Flow.
3.2.1.2 Modèle Dynamique Découplé (D.M)
Dans le modèle dynamique 3.3 la matrice gxa(xd,xa) est multipliée : par la matrice
gxd(xd,xa) qui comprend tous les termes manquant des noeuds générateurs ainsi que la
fonction F(.) qui contient l’expression des différentes puissances des générateurs, donc

67
on se retrouve presque dans la même formation du problème de calcul du load flow avec
toutes les composantes de la matrice Jacobienne, dans cette contribution, nous avons
appliqué un changement sur la matrice gxa(xd,xa) de façon similaire à celui du mode
découplé lors du calcul du load flow : faire l’Hypothèse du découplage des variables :
" Dans un réseau à haute tension, on sait que les phases θ réagissent essentiellement la
circulation des puissances actives et que les modules des tensions nodales U sont princi-
palement dépendants de la circulation des puissances réactives". Dans ces conditions, on
peut annuler les sous matrices [ j2] et [ j3] ", [1]. Donc on écrit cette matrice, sans perte
de généralité, sous la forme simplifiée suivante (Modèle Découplé D.M) :
gxa(xd,xa)|Dec =
∂g(xd ,xa)|Dec
∂xa=
gxa1 0
0 gxa4
≃ [J] =
j1 0
0 j4
(3.5)
Pour la suite de la thèse, le modèle que nous allons considérer (comme modèle 3.1
et sans transformations) est sous la forme suivante (Modèle qui met en évidence la dy-
namique du rotor et des charges statiques [5]) :
f Ii : δ −ωi +ωs = 0
f IIi : ωi =
ωs
2M(PMi
−PGi(δ ,θ ,V )−Dωi)
gIi : Pj −Pj(δ ,θ ,V )
gIIi : Q j −Q j(δ ,θ ,V )
yq : Pc,d Pc,d(δ ,θ ,V )
(3.6)
Avec i : 1...ng −1; j : ng +1...ng +nl;q : 1...m;c,d : 1...N et u =PMi
M,β = Ybus,F(.) =
[ fi,g j]T ou u et Pc,d seront la commande et la sortie dans le modèle 1.7.
A noter que les hypothèses et les propositions données peuvent se généraliser pour les
autres formes des modèles qui prennent en compte d’autres caractéristiques des charges
[20]et des générateurs [5].

68
Finalement le modèle complet sous forme O.D.E est le suivant :
x =
xd
xa
= f (xd,xa,u)
=
Fd(xd,xa,u)
−g−1xa(xd,xa)gxd
(xd,xa)F(xd,xa,u)
y =
0
y
= h(xd,xa) =
g(xd,xa)
h(xd,xa)
(3.7)
3.2.2 Résultats de simulation du modèle dynamique
Nous allons présenter dans cette partie les résultats de simulation des deux modèles
dynamiques discrétisés (O.M et D.M) sur les réseaux test IEEE 3 et 13 noeuds. Dans un
premier temps, nous allons présenter le modèle dynamique complet (O.M) du réseau test
3 noeuds ainsi que les transformations et les approximations faites.
Le modèle DAE du réseau test 3 noeuds est le suivant :
f I : x1 = x2 −ωs
f II : x2 =ωs
2M(PM3
−PG3(x1,x3,x4)−Dx2)
gI : P2 −P2(x1,x3,x4) = 0
gII : Q2 −Q2(x1,x3,x4) = 0
y1 : P3,2(x1,x3,x4)
(3.8)
Avec : PG3(x1,x3,x4) est la puissance électrique du noeud générateur 3, P3,2(x1,x3,x4)
est la puissance qui transite entre les noeuds 3 et 2 et :
x1 = δ3 : l’angle de rotation mécanique du noeud générateur 3
x2 = ω3 : la vitesse angulaire mécanique du noeud 3
x3 = θ2 : la phase du noeud charge 2
x4 =V2 : la tension au noeud 2
tout en notant que x1 , x2 représentent les variables dynamiques et x3,x4 les variables
algébriques. Donc pour transformer ce système 3.8 sous forme O.D.E, on fait la trans-
69
formation 3.3 tel que :
gxa(xa,xd) =
∂P2(x1,x3,x4)∂x3
∂P2(x1,x3,x4)∂x4
∂Q2(x1,x3,x4)∂x3
∂Q2(x1,x3,x4)∂x4
gxd(xa,xd) =
∂P2(x1,x3,x4)∂x1
∂P2(x1,x3,x4)∂x2
∂Q2(x1,x3,x4)∂x1
∂Q2(x1,x3,x4)∂x2
On se retrouve avec les mêmes expressions que celles calculées pour la détermination
des éléments de la diagonale de la matrice Jacobienne utilisée dans le calcul de flux de
puissance flow où les éléments de gxa(xa,xd) :
∂P2(x1,x3,x4)∂x3
= −Q2(x1,x3,x4)−B22x24
∂P2(x1,x3,x4)∂x4
= G22x4 +P2(x1,x3,x4)
x4
∂Q2(x1,x3,x4)∂x3
= P2(x1,x3,x4)−G22x24
∂Q2(x1,x3,x4)∂x4
= Q2(x1,x3,x4)x4
−B22x4
et gxd(xa,xd) :
∂P2(x1,x3,x4)∂x1
= x4V3[G23 sin(x3 − x1)−B23 cos(x3 − x1)]∂P2(x1,x3,x4)
∂x2= 0
∂Q2(x1,x3,x4)∂x1
= −x4V3[G23 cos(x3 − x1)+B23 sin(x3 − x1)]∂Q2(x1,x3,x4)
∂x2= 0
(avec : V3 est la tension imposée par le noeud générateur 3)
• Pour le modèle découplé (comme celui du calcul du Load Flow) on approxime
dans la matrice gxa(xa,xd) :
∂P2(x1,x3,x4)∂x4
≈ ∂Q2(x1,x3,x4)∂x3
≈ 0. Où g−1xa
et gxdsont
calculées numériquement.
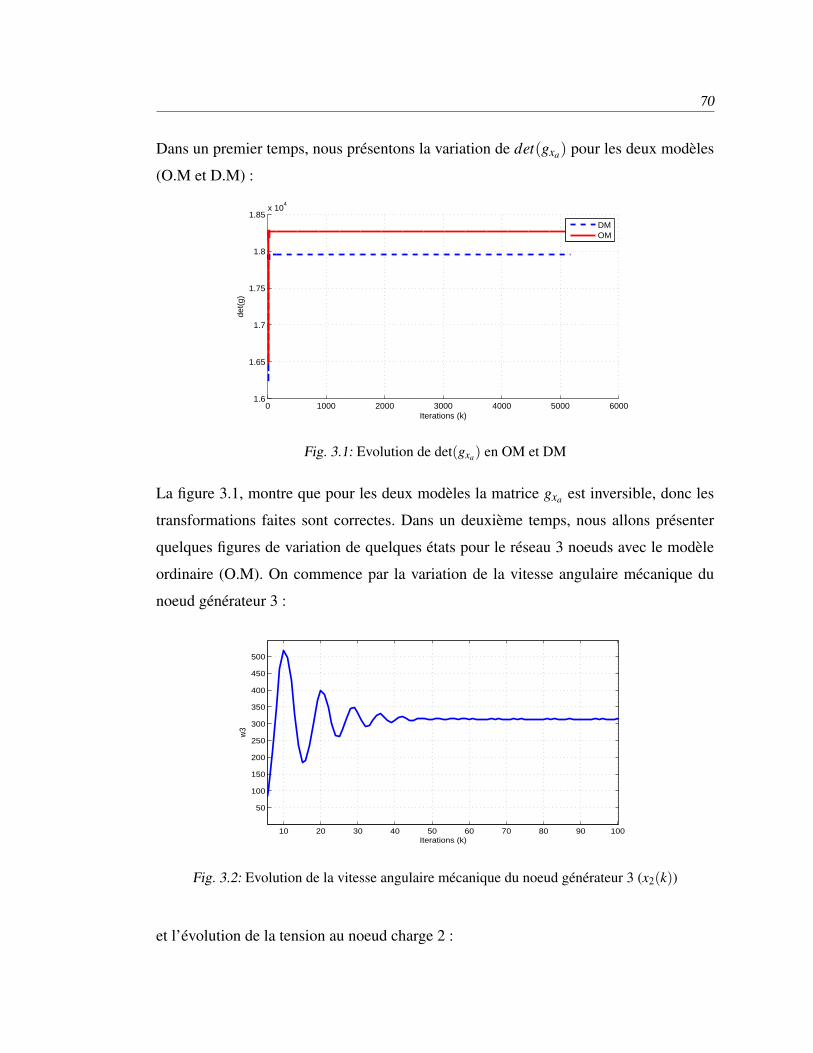
70
Dans un premier temps, nous présentons la variation de det(gxa) pour les deux modèles
(O.M et D.M) :
0 1000 2000 3000 4000 5000 60001.6
1.65
1.7
1.75
1.8
1.85x 10
4
Iterations (k)
det(
g)
DMOM
Fig. 3.1: Evolution de det(gxa) en OM et DM
La figure 3.1, montre que pour les deux modèles la matrice gxaest inversible, donc les
transformations faites sont correctes. Dans un deuxième temps, nous allons présenter
quelques figures de variation de quelques états pour le réseau 3 noeuds avec le modèle
ordinaire (O.M). On commence par la variation de la vitesse angulaire mécanique du
noeud générateur 3 :
10 20 30 40 50 60 70 80 90 100
50
100
150
200
250
300
350
400
450
500
Iterations (k)
w3
Fig. 3.2: Evolution de la vitesse angulaire mécanique du noeud générateur 3 (x2(k))
et l’évolution de la tension au noeud charge 2 :
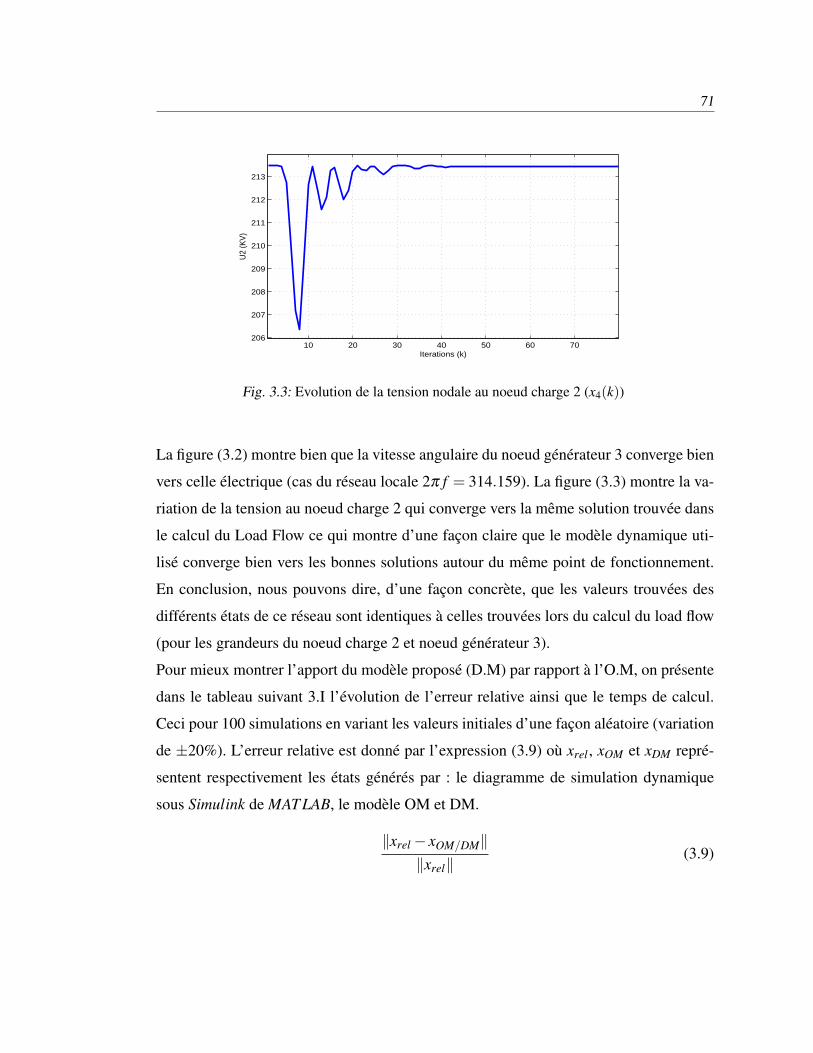
71
10 20 30 40 50 60 70206
207
208
209
210
211
212
213
Iterations (k)
U2
(KV
)
Fig. 3.3: Evolution de la tension nodale au noeud charge 2 (x4(k))
La figure (3.2) montre bien que la vitesse angulaire du noeud générateur 3 converge bien
vers celle électrique (cas du réseau locale 2π f = 314.159). La figure (3.3) montre la va-
riation de la tension au noeud charge 2 qui converge vers la même solution trouvée dans
le calcul du Load Flow ce qui montre d’une façon claire que le modèle dynamique uti-
lisé converge bien vers les bonnes solutions autour du même point de fonctionnement.
En conclusion, nous pouvons dire, d’une façon concrète, que les valeurs trouvées des
différents états de ce réseau sont identiques à celles trouvées lors du calcul du load flow
(pour les grandeurs du noeud charge 2 et noeud générateur 3).
Pour mieux montrer l’apport du modèle proposé (D.M) par rapport à l’O.M, on présente
dans le tableau suivant 3.I l’évolution de l’erreur relative ainsi que le temps de calcul.
Ceci pour 100 simulations en variant les valeurs initiales d’une façon aléatoire (variation
de ±20%). L’erreur relative est donné par l’expression (3.9) où xrel , xOM et xDM repré-
sentent respectivement les états générés par : le diagramme de simulation dynamique
sous Simulink de MAT LAB, le modèle OM et DM.
‖xrel − xOM/DM‖
‖xrel‖(3.9)

72
Tab. 3.I: erreur relative (%) et temps de calcul
OM DM
Erreur relative 4.133% 2.679%
Temps de Calcul 1.72s 1.24s
On voit bien, d’après la deuxième ligne du Tableau 3.I, que le modèle découplé proposé
converge avec une meilleur précision par rapport au modèle OM. De plus, le résultat
montre que le temps de calcul est plus faible avec le DM ce qui permet l’implémenta-
tion et l’application en temps réel. Pour le calcul de xa, l’expression mathématique est
donnée par (3.10) pour DM et (3.11) pour l’OM.
xa =
θ
V
=
−P−1θ j
Pδi0
−Q−1V j
Qδi0
Fd(xd,xa,u) (3.10)
avec Pδi=
∂Pj
∂δiet Qδi
=∂Q j
∂δi.
xa =
−P−1θ j
Pδi−T1(Pδi
+Qδi) 0
−Q−1V j
Qδi+T2 +T3 0
Fd(xd,xa,u) (3.11)
ou :
T1 =−P−1θ j
PV j(QV j
−Qθ jP−1
θ jPV j
)−1
T2 = Q−1V j
Qθ jP−1
θ jPδi
T3 = (Ina/2 +Q−1V j
Qθ jP−1
θ jPV j
)−1Q−1V j
Qθ jP−1
θ j·
·PV jQ−1
V j(Qθ j
P−1θ j
Pδi−Qδi
)
et : ∂P∂θ = Pθ , ∂P
∂V= PV , ∂Q
∂θ = Qθ et ∂Q∂V
= QV .
On note, en utilisant les équations 3.10 et 3.11, que le DM néglige les termes (T1, T2
et T3) utilisées avec l’OM (ce qui réduit le temps de calcul). Ces termes négligés peuvent
mener le système (dans le régime transitoire) à des valeurs importantes ce qui réduit le
temps de réponse ainsi que la stabilité (ces termes peuvent engendrer des instabilités nu-
mériques). Dans ce qui suit nous présentons la variation de la tension nodale au noeud
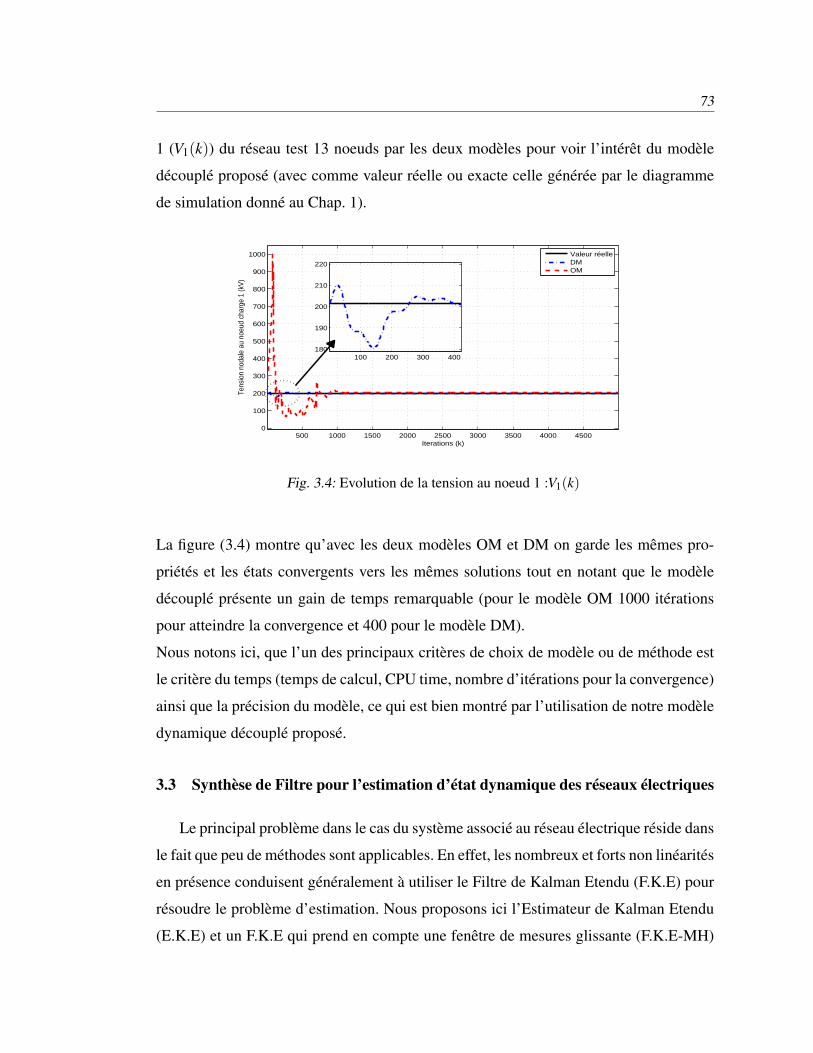
73
1 (V1(k)) du réseau test 13 noeuds par les deux modèles pour voir l’intérêt du modèle
découplé proposé (avec comme valeur réelle ou exacte celle générée par le diagramme
de simulation donné au Chap. 1).
500 1000 1500 2000 2500 3000 3500 4000 45000
100
200
300
400
500
600
700
800
900
1000
Iterations (k)
Tens
ion
noda
le a
u no
eud
char
ge 1
(kV)
100 200 300 400180
190
200
210
220
Valeur réelleDMOM
Fig. 3.4: Evolution de la tension au noeud 1 :V1(k)
La figure (3.4) montre qu’avec les deux modèles OM et DM on garde les mêmes pro-
priétés et les états convergents vers les mêmes solutions tout en notant que le modèle
découplé présente un gain de temps remarquable (pour le modèle OM 1000 itérations
pour atteindre la convergence et 400 pour le modèle DM).
Nous notons ici, que l’un des principaux critères de choix de modèle ou de méthode est
le critère du temps (temps de calcul, CPU time, nombre d’itérations pour la convergence)
ainsi que la précision du modèle, ce qui est bien montré par l’utilisation de notre modèle
dynamique découplé proposé.
3.3 Synthèse de Filtre pour l’estimation d’état dynamique des réseaux électriques
Le principal problème dans le cas du système associé au réseau électrique réside dans
le fait que peu de méthodes sont applicables. En effet, les nombreux et forts non linéarités
en présence conduisent généralement à utiliser le Filtre de Kalman Etendu (F.K.E) pour
résoudre le problème d’estimation. Nous proposons ici l’Estimateur de Kalman Etendu
(E.K.E) et un F.K.E qui prend en compte une fenêtre de mesures glissante (F.K.E-MH)

74
afin d’augmenter la précision ainsi que la robustesse d’estimation. Une étude de conver-
gence d’E.K.E sera traitée avec une extension pour le F.K.E-MH dans la suite.
3.3.1 Estimateur de Kalman Etendu (E.K.E)
Le filtre de Kalman étendu est un estimateur récursif. Cela signifie que pour estimer
l’état courant, seuls l’état précédent et les mesures actuelles sont nécessaires. L’histo-
rique des observations et des estimations n’est ainsi pas requis. Dans le filtre de Kalman
étendu (F.K.E) [36], les modèles d’évolution et d’observation n’ont pas besoin d’être des
fonctions linéaires de l’état mais peuvent à la place être des fonctions différentiables.
Notre système discret à considérer (nous utilisons la méthode d’Euler avec une période
d’échantillonnage Te, xk+1 = xk + Te f (xk,uk) pour discrétiser le modèle continu (3.7))
est de la forme discrète suivante :
xk+1 = f (xk,uk)+wk
yk = h(xk,uk)+ vk
(3.12)
avec : vk et wk sont respectivement bruit sur le système et les mesures à l’instant kTe.
La fonction f peut être utilisée pour calculer l’état estimé précédent et, également, la
fonction h peut être employée pour calculer l’observation de l’état estimé. Cependant,
f et h ne peuvent pas être appliqués directement au calcul de la covariance : une ma-
trice des dérivées partielles (la Jacobienne) est calculée à chaque instant et évaluée avec
les états estimés courants. Ces matrices peuvent être employées dans les équations du
filtre de Kalman. Ce processus linéarise essentiellement la fonction non linéaire autour
de l’estimation courante. Ceci donne les équations d’estimateur de Kalman étendu sui-
vantes :
xk+1 = f (xk,uk)+Kkek
Kk = FkPkHTk (HkPkHT
k +Rk)−1
Pk+1 = (Fk −KkHk)PkFTk +Qk
ek = yk −h(xk,uk)
(3.13)
75
ou : Fk = F(xk,uk) =∂ (xk+Te f (xk,uk))
∂xk|xk=xk
et Hk = H(xk,uk) =∂ h(xk,uk)
∂xk|xk=xk
.
Dans la littérature, il existe quelques méthodes utilisant le F.K.E sur un système modé-
lisé sous forme D.A.E linéarisé tel que [62], mais nous allons dans ce qui suit l’appliquer
sous sa forme générale avec quelques approximations numériques que nous proposons
pour le calcul de la matrice Jacobienne.
Dans un premier temps, il faut noter que suite à la difficulté (voir impossible) de construire
la matrice Fk suite à la transformation des variables algébriques du réseau électrique,
nous allons faire l’approximation numérique suivante :
Fk = F(xk,uk) =∂ (xk+Te f (xk,uk))
∂xk|xk=xk
=
∂ (xd+TeFd(xdk,xak
,uk))
∂ (xdk,xak
)
∂ (xa+Te(−g−1xa
(xdk,xak
)gxd(xdk
,xak)Fd(xdk
,xak,uk)))
∂ (xdk,xak
)
(3.14)
L’approximation numérique faite sur le deuxième terme de Fk ,vue qu’il est très difficile
à déterminer, est calculé comme suit :
∂ (xa+Te(−g−1xa
(xdk,xak
)gxd(xdk
,xak)Fd(xdk
,xak,uk)))
∂ (xdk,xak
) ≈ (Ina+Te(−g−1
xa(xdk
,xak)gxd
(xdk,xak
)∂Fd(xdk
,xak,uk)
∂ (xdk,xak
) ))
(3.15)
pour : xdk= xdk
; xak= xak
et g−1xa
; gxdsont calculées numériquement.
3.3.2 Filtre de Kalman Etendu avec fenêtre de mesure glissante (F.K.E-MH)
Nous étudions dans cette partie le Filtre de Kalman Etendu qui prend en compte
une fenêtre de mesures glissante (F.K.E-MH) afin d’augmenter la précision ainsi que la
robustesse d’estimation. Nous présentons dans cette section la synthèse de cet estimateur.
Nous considérons le système 3.12, avec f et h sont continues et dérivables, l’estimateur
proposé est donné par :
xk+1 = f (xk)+Kk
yk −h(xk)
yk−1 −h(xk−1)...
yk−M+1 −h(xk−M+1)
(3.16)

76
avec : M est la taille de la fenêtre glissante ; xk+1 est l’estimé de xk+1 en utilisant les
informations yk, . . . ,yk−M et Kk est le gain du filtre qui est déterminé de façon qu’il
minimise la trace de la matrice de covariance de l’erreur d’estimation. Dans ce qui suit
nous calculons les différents paramètres du filtre.
Nous définissons :
Pkk = E(xkxT
k )
xk+1 = xk+1 − xk+1
(3.17)
et :
• Pkk− j = E(xkxT
k− j), avec j = 1, . . . ,M
• xk− j = xk− j − xk− j
• Ck = diag[Hk(xk) . . . Hk(xk−M+1)].
où : xk+1 = xk+1 − xk+1.
Considérant les approximations suivantes :
f (xk)− f (xk) = Fkxk
h(xk)−h(xk) = Hkxk
(3.18)
et : E(wk) = E(vk) = 0 (avec Fk et Hk sont calculés de la même façon que dans E.K.E).
Nous pouvons développer Pk+1k+1 = E(xk+1xT
k+1) pour obtenir :
Pk+1k+1 = FkPk
k FTk +KkCkPkC
Tk KT
k −Fk[Pkk Pk−1
k . . . Pk−M+1k ]CT
k KTk
−KkCk
Pkk
Pkk−1...
Pkk−M+1
FTk +KkRkKT
k +Qk
(3.19)

77
Dans l’expression de 3.19, intervient la matrice de covariance d’erreur d’estimation
globale Pk. Cette matrice est calculée à l’instant suivant comme suit :
Pk+1 =
Pk+1k+1 Pk
k+1 . . . Pk−M+2k+1
Pk+1k
.... . .
Pk+1k−M+2 · · · Pk−M+2
k−M+2
(3.20)
Où d’une itération à l’autre, seule la première ligne de Pk+1 est inconnue et peut être
calculée par 3.19 pour le premier élément, les autres sont définis par :
Pk−ik+1 = E(xk+1xT
k−i) (3.21)
Nous rappelons à ce stade que : Pk−ik− j = (P
k− jk−i )
T .
Pk−ik+1 = FkPk−i
k −KkCk
Pk−ik
Pk−ik−1...
Pk−ik−M+1
(3.22)
Le gain Kk doit être calculé d’une façon à minimiser la trace de la matrice de covariance
de l’erreur d’estimation (Pk+1k+1 = E(xk+1xT
k+1)) :
∂ trace(Pk+1k+1 )
∂Kk
= 0 (3.23)
Ainsi, nous obtenons Kk satisfaisant 3.23 :
Kk = Fk[Pkk Pk−1
k . . . Pk−M+1k ]CT
k (CkPkCTk +Rk)
−1 (3.24)
Démonstration :

78
Dans un premier temps, Pk+1k+1 peut être exprimé sous la forme (3.25) en définissant :
Vk =
vk
vk−1
...
vk−M+1
Pk+1k+1 = E
[
f (xk,uk)+wk − f (xk)+Kk
yk −h(xk)
yk−1 −h(xk−1)...
yk−M+1 −h(xk−M+1)
f (xk,uk)+wk − f (xk)+Kk
yk −h(xk)
yk−1 −h(xk−1)...
yk−M+1 −h(xk−M+1)
T
]
(3.25)
donc :
Pk+1k+1 =E
[
Fkxk+wk−KkCk
xk
xk−1
...
xk−M+1
−KkVk
Fkxk+wk−KkCk
xk
xk−1
...
xk−M+1
−KkVk
T
]
(3.26)
En supposant maintenant qu’il n’y a pas de dépendance entre les bruits et l’erreur
d’estimation, nous pouvons facilement déduire en posant P1k =
[
Pkk Pk−1
k . . . Pk−M+1k
]
:
Pk+1k+1 = FkPk
k FTk +Qk +KkCkPkC
Tk KT
k −FkP1k CT
k KTk −KkCk(P
1k )
T FTk +KkRkKT
k (3.27)
à ce stade, il nous reste juste de chercher le gain Kk qui minimise la trace de Pk+1k+1 :
∂ trace(Pk+1k+1 )
∂Kk
= 0
79
ceci nous mène à :
2Kk(Rk +CkPkCTk )−2FkP1
k CTk = 0 (3.28)
ou :
Kk = FkP1k CT
k (CkPkCTk +Rk)
−1 (3.29)
Fin démonstration
Le fait d’utiliser une fenêtre glissante sur les mesures introduit une matrice Pk+1
et ses éléments, le calcul de Kk tient alors compte des mesures précédentes et diffère
en ce sens du F.K.E classique. L’initialisation du filtre est donnée par E.K.E dans sa
formulation classique :
P0 = diag[PE.K.EM PE.K.E
M−1 . . . PE.K.E0 ] (3.30)
3.3.3 Analyse de la convergence
Dans cette section, nous présentons une étude de convergence pour l’Estimateur de
Kalman Etendu [63], nous étendrons les résultats pour le Filtre de Kalman Etendu avec
une fenêtre de mesure glissante, basée sur les travaux de [64], [39] et [38] en incluant une
matrice diagonale inconnue pour la linéarisation des erreurs et une fonction de Lyapunov
qui mène à résoudre une LMI qui dépend du choix des matrices Rk et Qk.
Premièrement, soit le vecteur d’erreur défini comme suit : xk = xk − xk
et soit une fonction de Lyapunov candidate :
Vk+1 = xTk+1P−1
k+1xk+1
avec :
xk+1 = αk(Fk −KkHk)xk = αkFkxk
P−1k+1 = (FkPkFT
k +Qk)−1
αk = diag(α1k, ...,α(nd+na)k)

80
Nous avons :
Vk+1 = (αkFkxk)T P−1
k+1(αkFkxk)
= xTk FT
k αk(FkPkFTk +Qk)
−1αkFkxk
(3.31)
Une séquence décroissante Vkk=1,... nous permet de dire qu’il existe un scalaire positif
0 < ξ < 1 tel que :
Vk+1 − (1−ξ )Vk ≤ 0
Ce qui est traduit par la formulation de cette LMI :
FTk αk(FkPkFT
k +Qk)−1αkFk − (1−ξ )P−1
k ≤ 0 (3.32)
Avec le même raisonnement que celui utilisé par [64] nous déterminons les domaines où
(3.32) est satisfaite.
Avec l’hypothèse suivante :
|α jk| ≤ αk = sup j|α jk| ≤
(
(1−ξ )σ(FkPkFTk +Qk)
σ(FTk )σ(Pk)σ(Fk)
)
12
(3.33)
il est claire que Vkk=1,... est une séquence décroissante. Avec σ et σ sont respective-
ment la valeur singulière maximale et minimale. Nous définissons dés le début que la
matrice αk est une matrice diagonale, donc nous avons :
[σ(αk)]2 ≤
(1−ξ )σ(FkPkFTk +Qk)
σ(FTk)σ(Pk)σ(Fk)
≤(1−ξ )σ(P−1
k)
σ(FTk)σ((FkPkFT
k+Qk)−1)σ(Fk)
(3.34)
par la suite :
σ(FTk αk(FkPkFT
k +Qk)−1αkFk)≤ [σ(αk)]
2σ(FTk )σ((FkPkFT
k +Qk)−1)σ(Fk)≤ (1−ξ )σ(P−1
k )
(3.35)
Si (3.35) est satisfaite, consécutivement Vk est une séquence strictement décroissante.
Cette dernière équation nous donne une idée sur le choix de Qk et Rk, nous procédons

81
comme suit :
σ(Fk) = σ(Fk −KkHk) = σ(Fk −FkPkHTk (HkPkHT
k +Rk)−1Hk)
= σ [Fk(Ina+nd−PkHT
k (HkPkHTk +Rk)
−1Hk)](3.36)
en utilisant : Ak = PkHTk (HkPkHT
k +Rk)−1Hk, nous avons donc :
σ(Fk)≤ σ(Fk)σ [Ak(A−1k + Ina+nd
)]≤ σ(Fk)σ(Ak)σ(A−1k + Ina+nd
) (3.37)
et :
σ(Ak)≤ σ(PkHTk )σ((HkPkHT
k +Rk)−1Hk))
≤ σ(PkHTk )σ((HkPkHT
k +Rk)−1)σ(Hk)≤
σ(PkHTk )σ(Hk)
σ(HkPkHTk+Rk)
(3.38)
finalement, nous avons :
σ(Fk)≤σ(Fk)σ(PkHT
k )σ(Hk)σ(A−1k + Ina+nd
)
σ(HkPkHTk +Rk)
(3.39)
Par exemple nous pouvons choisir Qk suffisamment large et Rk tel que (3.35)est satis-
faite, donc αk doit être large et pas nécessairement très proche de la matrice identité.
Afin d’assurer que limk→∞(xk − xk) = 0 et puisque Vk est une séquence strictement dé-
croissante avec Pk est une matrice bornée , on a donc :
0 ≤ µ xTk xk ≤Vk ≤ (1−ξ )kV0
⇒ 0 ≤ µ limk→∞(xTk xk)≤ limk→∞(Vk)≤V0 limk→∞((1−ξ )k) = 0
avec 0 ≤ µInd+na≤ P−1
k .
Consécutivement, et toujours avec les mêmes étapes que dans [64] et [38], pour que
le F.K.E ,E.K.E et le F.K.E-MH assurent la convergence asymptotique locale, ils doivent
vérifier ce théorème (extension du théorème de [64]) :
Théorème 3.3.1. 1. le système (3.12) est A-Uniformément et localement observable
au sens du rang, donc il existe k ≥ A−1 tel que le rang de la matrice d’observa-

82
bilité est :
rank(O(k−A+1,k)) =
Hk−A+1
Hk−A+2Fk−A+1
....
HkFk−1...Fk−A+1
= (nd +na) (3.40)
dans la pratique, on utilise un test numérique pour le calcul du rang de O(k−A+
1,k).
2. Fk, Hk sont des matrices uniformément bornées et F−1k existe.
3. Les matrices Qk et Rk sont choisies tel que :
(a) Pour le F.K.E :
Qk = γeTk ekInd+na
+λ Ind+na
Rk = ςHk+1Pk+1/kHTk+1 + τIm
(3.41)
où : γ doit être choisies suffisamment large et positive, λ un scalaire positif
mais de très petite valeur et ς et τ des scalaires positifs fixé par l’utilisateur.
(b) Pour E.K.E :
Qk = ηeTk ekInd+na
+υInd+na
Rk = εHkPkHTk +µIm
(3.42)
avec : η etυ doivent être choisies larges (grande valeur) et positives et ε et
τ des scalaires positifs fixé par l’utilisateur.
(c) Pour F.K.E-MH :
Qk = σe f Tk e fkInd+na
+χInd+na
Rk = ρCkPkCTk +ρIM
(3.43)

83
avec e fk =
yk −h(xk)
yk−1 −h(xk−1)...
yk−M+1 −h(xk−M+1)
et : σ et ρ sont choisies de petites
valeurs et positives et χ et ρ des scalaires positifs.
3.3.4 Résultats de Simulation pour l’estimation d’état
Nous traitons dans cette partie de simulation les réseaux test 3 et 13 noeuds. La pé-
riode d’échantillonnage est choisie égale à 10−4s et les données ou le vecteur de mesures
est généré par le le diagramme de simulation du modèle dynamique (proposé dans le
premier chapitre, section Aspect dynamique) en utilisant Simulink de MAT LABr. Nous
notons que dans cette partie nous allons appliquer seulement le F.K.E pour l’estimation
d’état.
3.3.4.1 Réseau 3 noeuds
Dans un premier temps, et avant l’application de l’Estimateur de Kalman Etendu,
nous devons vérifier le rang de la matrice d’observabilité (c-à-d l’observabilité de notre
système) qui est illustré dans cette figure 3.5 avec A = 4 :
0 1000 2000 3000 4000 5000 60000
1
2
3
4
5
6
Iterations (k)
ran
k(O
)
Fig. 3.5: Evolution du rang de la matrice d’observabilité : rang(O(k−4,k)3noeuds)

84
Après avoir vérifier la condition d’observabilité (rang(O(k−4,k)3noeuds) = 4), nous présentons
la variation de quelques états estimés. Dans un premier temps, nous avons ajouté aux
mesures (puissance de transit P3,2) un bruit de faible valeur (de l’ordre de ±5% de la
valeur réelle) avec :
QE.K.Fk = 0.964I4
RE.K.Ek = 0.021
La figure suivante 3.6 montre la variation de l’erreur d’estimation du réseau test 3
noeuds :
0 1000 2000 3000 4000 5000 6000−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
Iterations (k)
e (k)
Fig. 3.6: Evolution de l’erreur d’estimation
Il est claire d’après la figure ci-dessus, que les états estimés convergent bien vers ceux
réels puisque ek ≈ 0 (faible variation). Nous présentons maintenant l’évolution des états
estimés : tension nodale au noeud charge 2 (x4(k)) dans la figure 3.7 et la vitesse an-
gulaire mécanique au noeud générateur 3 (x2(k)) dans la figure 3.8 tout en variant la
commande du système (puissance mécanique au noeud 3) à partir de l’itération 2750 :
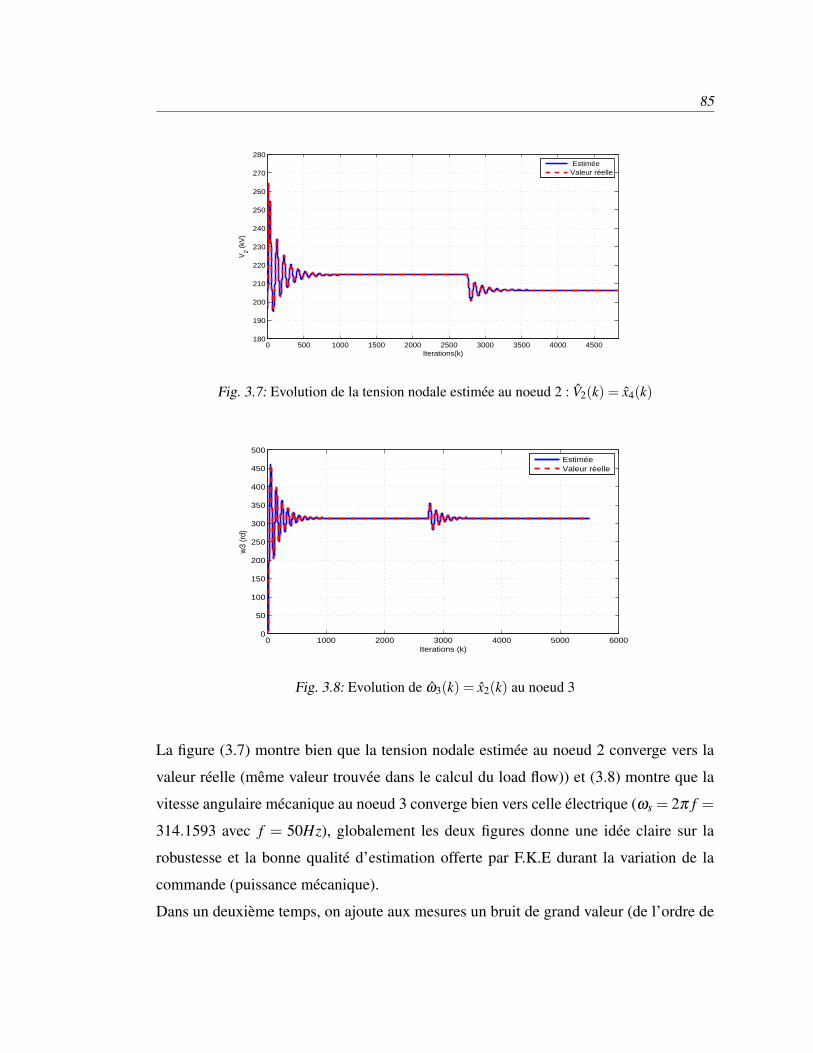
85
0 500 1000 1500 2000 2500 3000 3500 4000 4500180
190
200
210
220
230
240
250
260
270
280
Iterations(k)
V2 (k
V)
EstiméeValeur réelle
Fig. 3.7: Evolution de la tension nodale estimée au noeud 2 : V2(k) = x4(k)
0 1000 2000 3000 4000 5000 60000
50
100
150
200
250
300
350
400
450
500
Iterations (k)
w3
(rd)
EstiméeValeur réelle
Fig. 3.8: Evolution de ω3(k) = x2(k) au noeud 3
La figure (3.7) montre bien que la tension nodale estimée au noeud 2 converge vers la
valeur réelle (même valeur trouvée dans le calcul du load flow)) et (3.8) montre que la
vitesse angulaire mécanique au noeud 3 converge bien vers celle électrique (ωs = 2π f =
314.1593 avec f = 50Hz), globalement les deux figures donne une idée claire sur la
robustesse et la bonne qualité d’estimation offerte par F.K.E durant la variation de la
commande (puissance mécanique).
Dans un deuxième temps, on ajoute aux mesures un bruit de grand valeur (de l’ordre de
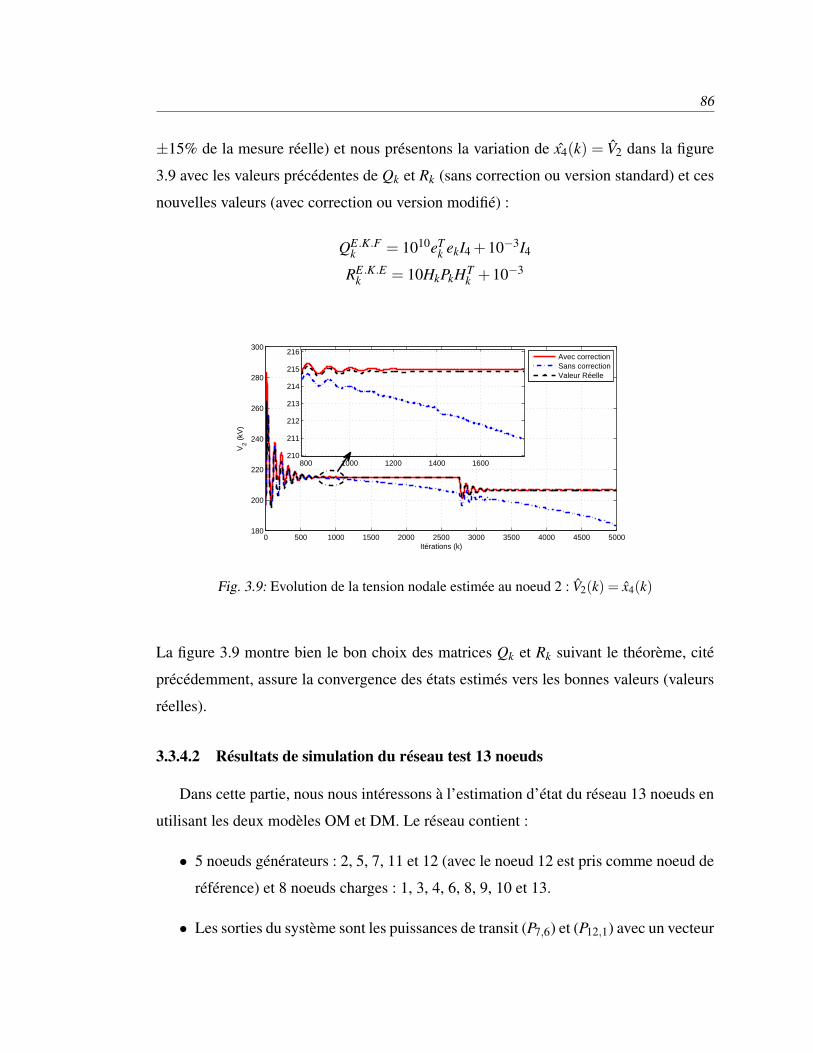
86
±15% de la mesure réelle) et nous présentons la variation de x4(k) = V2 dans la figure
3.9 avec les valeurs précédentes de Qk et Rk (sans correction ou version standard) et ces
nouvelles valeurs (avec correction ou version modifié) :
QE.K.Fk = 1010eT
k ekI4 +10−3I4
RE.K.Ek = 10HkPkHT
k +10−3
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000180
200
220
240
260
280
300
Itérations (k)
V2 (
kV)
Avec correctionSans correctionValeur Réelle
800 1000 1200 1400 1600210
211
212
213
214
215
216
Fig. 3.9: Evolution de la tension nodale estimée au noeud 2 : V2(k) = x4(k)
La figure 3.9 montre bien le bon choix des matrices Qk et Rk suivant le théorème, cité
précédemment, assure la convergence des états estimés vers les bonnes valeurs (valeurs
réelles).
3.3.4.2 Résultats de simulation du réseau test 13 noeuds
Dans cette partie, nous nous intéressons à l’estimation d’état du réseau 13 noeuds en
utilisant les deux modèles OM et DM. Le réseau contient :
• 5 noeuds générateurs : 2, 5, 7, 11 et 12 (avec le noeud 12 est pris comme noeud de
référence) et 8 noeuds charges : 1, 3, 4, 6, 8, 9, 10 et 13.
• Les sorties du système sont les puissances de transit (P7,6) et (P12,1) avec un vecteur

87
d’état composé de 24 variables ([x] = [δi ωi θ j Vj]T avec i = 2,5,7,11 et j =
1,3,4,6,8,9,10,13).
Dans un premier temps, et de même que pour le réseau 3 noeuds, nous présontons la
variation du rang de la matrice d’observabilité dans la figure (3.10).
0 500 1000 1500 2000 2500 30000
5
10
15
20
25
Iterations (k)
rank
(O)
Fig. 3.10: Evolution du rang de la matrice d’observabilité : rang(O(k−13,k)13noeuds)
Après la vérification de l’observabilité du réseau, rang(O(k−13,k)13noeuds) = 24, on s’intéresse à
l’estimation d’état. De même les mesures sont générées par le diagramme de simulation
dynamique (diagramme proposé dans le Chapitre 1, section Aspect dynamique) tout en
ajoutant un bruit de faible valeur (de ±5% de valeur réelle) et avec :
QE.K.Fk = 2.753∗10−5I24
RE.K.Ek =
0.015664 0
0 0.014307
Nous présentons, avec les deux modèles OM et DM, l’évolution de V1(k)−V1relle(k) (fi-
gure (3.11)) :
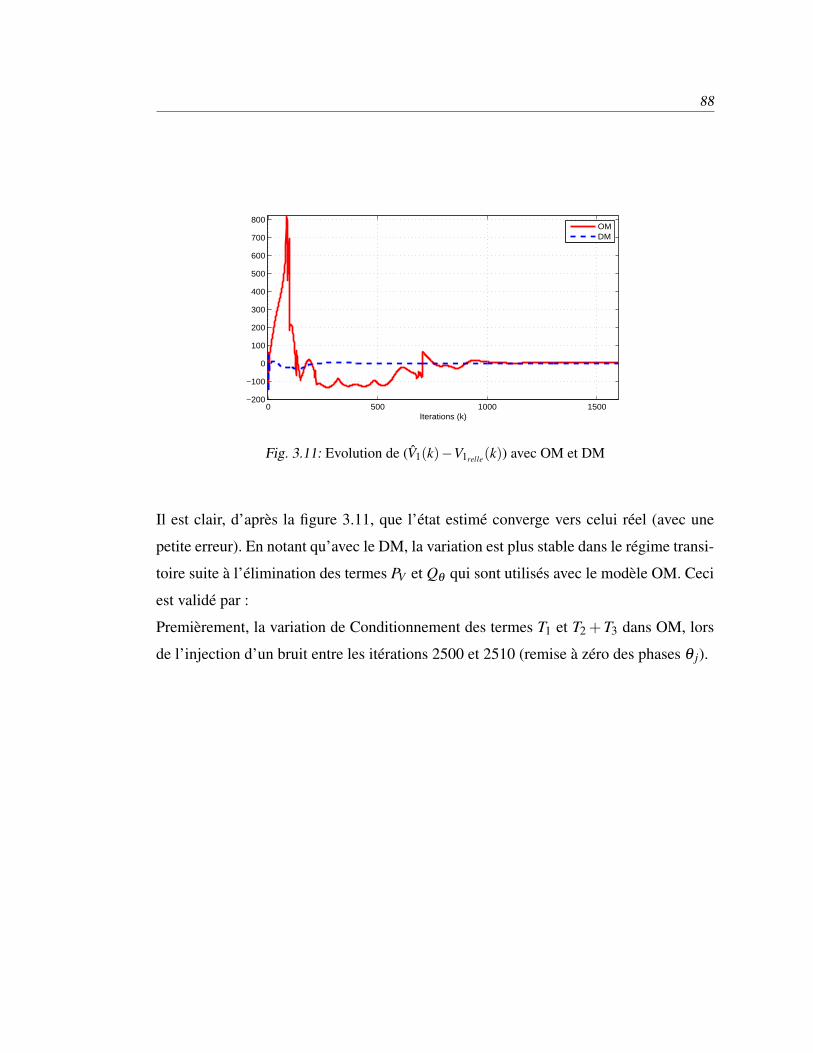
88
0 500 1000 1500−200
−100
0
100
200
300
400
500
600
700
800
Iterations (k)
OMDM
Fig. 3.11: Evolution de (V1(k)−V1relle(k)) avec OM et DM
Il est clair, d’après la figure 3.11, que l’état estimé converge vers celui réel (avec une
petite erreur). En notant qu’avec le DM, la variation est plus stable dans le régime transi-
toire suite à l’élimination des termes PV et Qθ qui sont utilisés avec le modèle OM. Ceci
est validé par :
Premièrement, la variation de Conditionnement des termes T1 et T2 +T3 dans OM, lors
de l’injection d’un bruit entre les itérations 2500 et 2510 (remise à zéro des phases θ j).
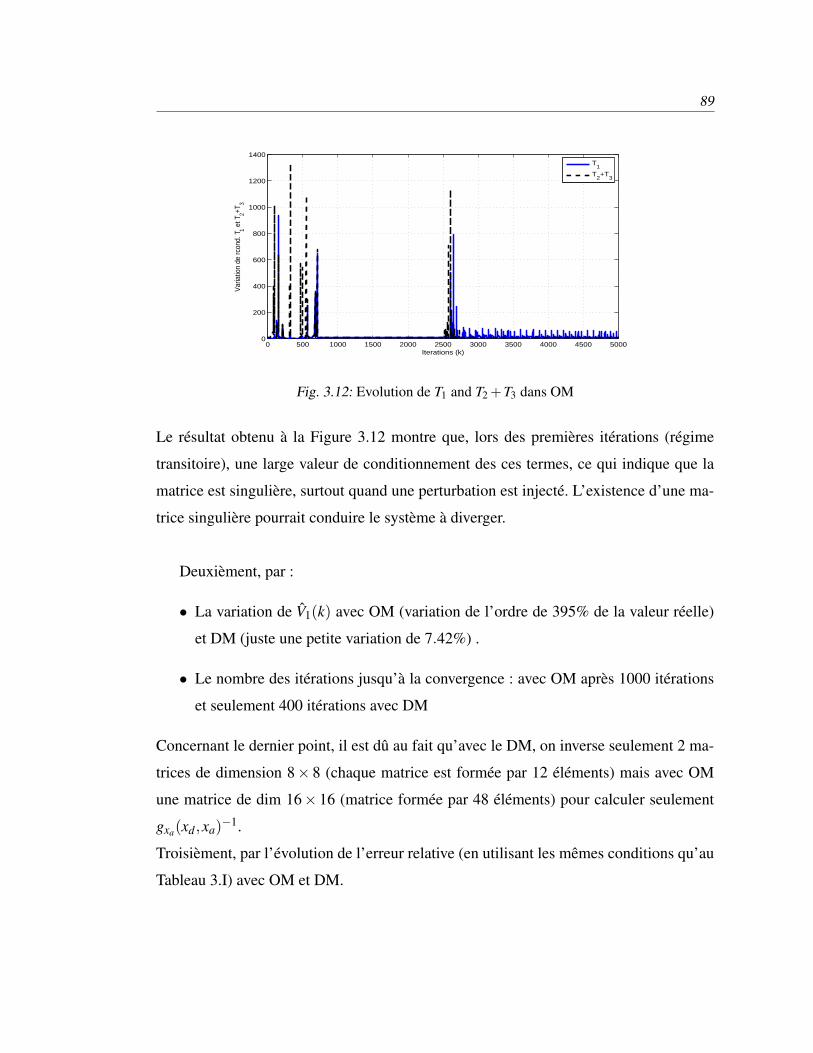
89
0 500 1000 1500 2000 2500 3000 3500 4000 4500 50000
200
400
600
800
1000
1200
1400
Iterations (k)
Varia
tion
de rc
ond.
T1 e
t T2+T
3
T
1
T2+T
3
Fig. 3.12: Evolution de T1 and T2 +T3 dans OM
Le résultat obtenu à la Figure 3.12 montre que, lors des premières itérations (régime
transitoire), une large valeur de conditionnement des ces termes, ce qui indique que la
matrice est singulière, surtout quand une perturbation est injecté. L’existence d’une ma-
trice singulière pourrait conduire le système à diverger.
Deuxièment, par :
• La variation de V1(k) avec OM (variation de l’ordre de 395% de la valeur réelle)
et DM (juste une petite variation de 7.42%) .
• Le nombre des itérations jusqu’à la convergence : avec OM après 1000 itérations
et seulement 400 itérations avec DM
Concernant le dernier point, il est dû au fait qu’avec le DM, on inverse seulement 2 ma-
trices de dimension 8× 8 (chaque matrice est formée par 12 éléments) mais avec OM
une matrice de dim 16× 16 (matrice formée par 48 éléments) pour calculer seulement
gxa(xd,xa)
−1.
Troisièment, par l’évolution de l’erreur relative (en utilisant les mêmes conditions qu’au
Tableau 3.I) avec OM et DM.

90
Tab. 3.II: erreur relative (%) et temps de calcul avec des valeurs initiales aléatoires
OM DM
Erreur relative 6.857% 3.819%
Temps de calcul 121.2s 98.016s
Le Tableau 3.II montre que le DM proposé converge avec une meilleure précision qu’avec
l’OM (avec DM 3.819% et OM 6.857%). On note aussi, que le temps de calcul utilisé
par DM (98.016s) donne une indication sur la faisabilité ainsi que la possibilité d’une
implémentation pratique.
Dans la deuxième simulation, les mesures sont générées en ajoutant un bruit de grande
variance (±15% de la valeur réelle). On présente l’évolution de la norme d’erreur d’esti-
mation par OM et DM : ‖xrel − x‖ (respectivement Fig. 3.13 et Fig. 3.14) avec les valeurs
précédentes de Qk et Rk (F.K.E Standard) et celles proposées dans le F.K.E modifié :
QE.K.Fk = 1010eT
k ekI24 +10−3I24
RE.K.Ek = 10HkPkHT
k +10−3I2
0 500 1000 1500 2000 2500 3000 3500 4000 4500 50000
1
2
3
4
5
6
7
8
9x 10
6
Iterations (k)
||xr−
x e||
E.K.F ModifiéE.K.F Standard
Fig. 3.13: Variation de ‖xrel − x‖ avec OM
Concernant l’évolution de l’erreur d’estimation, les résultats montrent que le choix pro-
posé des matrices Qk et Rk assure la convergence des états estimés vers les valeurs réelles.
Un autre problème, lié à la stabilité des méthodes utilisées pour l’estimation de l’état,
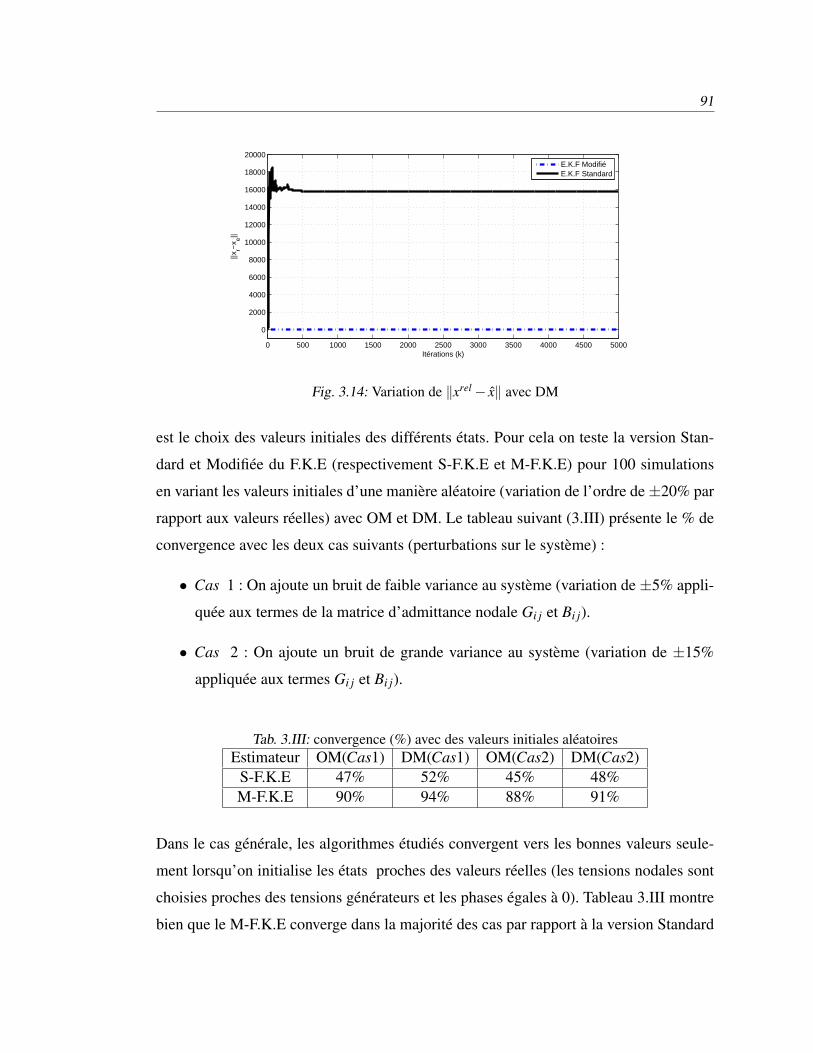
91
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000
0
2000
4000
6000
8000
10000
12000
14000
16000
18000
20000
Itérations (k)
||xr−
x e||
E.K.F ModifiéE.K.F Standard
Fig. 3.14: Variation de ‖xrel − x‖ avec DM
est le choix des valeurs initiales des différents états. Pour cela on teste la version Stan-
dard et Modifiée du F.K.E (respectivement S-F.K.E et M-F.K.E) pour 100 simulations
en variant les valeurs initiales d’une manière aléatoire (variation de l’ordre de ±20% par
rapport aux valeurs réelles) avec OM et DM. Le tableau suivant (3.III) présente le % de
convergence avec les deux cas suivants (perturbations sur le système) :
• Cas 1 : On ajoute un bruit de faible variance au système (variation de ±5% appli-
quée aux termes de la matrice d’admittance nodale Gi j et Bi j).
• Cas 2 : On ajoute un bruit de grande variance au système (variation de ±15%
appliquée aux termes Gi j et Bi j).
Tab. 3.III: convergence (%) avec des valeurs initiales aléatoires
Estimateur OM(Cas1) DM(Cas1) OM(Cas2) DM(Cas2)
S-F.K.E 47% 52% 45% 48%
M-F.K.E 90% 94% 88% 91%
Dans le cas générale, les algorithmes étudiés convergent vers les bonnes valeurs seule-
ment lorsqu’on initialise les états proches des valeurs réelles (les tensions nodales sont
choisies proches des tensions générateurs et les phases égales à 0). Tableau 3.III montre
bien que le M-F.K.E converge dans la majorité des cas par rapport à la version Standard
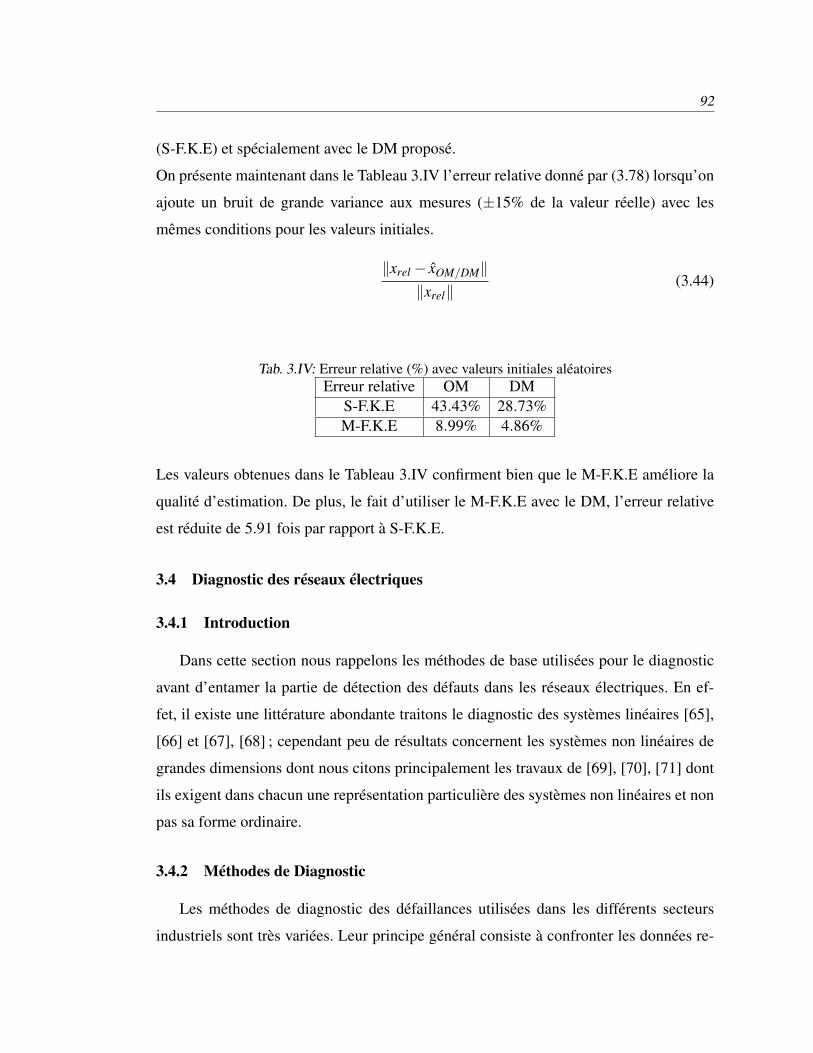
92
(S-F.K.E) et spécialement avec le DM proposé.
On présente maintenant dans le Tableau 3.IV l’erreur relative donné par (3.78) lorsqu’on
ajoute un bruit de grande variance aux mesures (±15% de la valeur réelle) avec les
mêmes conditions pour les valeurs initiales.
‖xrel − xOM/DM‖
‖xrel‖(3.44)
Tab. 3.IV: Erreur relative (%) avec valeurs initiales aléatoires
Erreur relative OM DM
S-F.K.E 43.43% 28.73%
M-F.K.E 8.99% 4.86%
Les valeurs obtenues dans le Tableau 3.IV confirment bien que le M-F.K.E améliore la
qualité d’estimation. De plus, le fait d’utiliser le M-F.K.E avec le DM, l’erreur relative
est réduite de 5.91 fois par rapport à S-F.K.E.
3.4 Diagnostic des réseaux électriques
3.4.1 Introduction
Dans cette section nous rappelons les méthodes de base utilisées pour le diagnostic
avant d’entamer la partie de détection des défauts dans les réseaux électriques. En ef-
fet, il existe une littérature abondante traitons le diagnostic des systèmes linéaires [65],
[66] et [67], [68] ; cependant peu de résultats concernent les systèmes non linéaires de
grandes dimensions dont nous citons principalement les travaux de [69], [70], [71] dont
ils exigent dans chacun une représentation particulière des systèmes non linéaires et non
pas sa forme ordinaire.
3.4.2 Méthodes de Diagnostic
Les méthodes de diagnostic des défaillances utilisées dans les différents secteurs
industriels sont très variées. Leur principe général consiste à confronter les données re-
93
levées au cours du fonctionnement réel du système avec la connaissance que l’on a de
son fonctionnement nominal ou de ses fonctionnements défaillants [72]. La forme, sous
laquelle se présente la connaissance sur le système, conditionne les différentes méthodes
utilisées pour le diagnostic. Elles peuvent être groupées en trois grandes familles [73],
[74], [75] : les méthodes de diagnostic par modélisation fonctionnelle et matérielle ou
méthodes basées sur le mode de raisonnement (définir des liens entre les causes et leurs
effets mesurables), les méthodes de diagnostic par modélisation physique ou méthodes
base modèles et enfin les méthodes de diagnostic par analyse des signatures externes
(dans le cas où la modélisation des mécanismes reliant les causes de défaillances n’est
pas techniquement possible : [ reconnaissances des formes, réseau de neurones, systèmes
experts]).
Nous nous intéressons aux méthodes qui s’articulent sur la modélisation physique qui se
dérivent dans deux approches principales qui se basent sur la redondance matérielle et
analytique.
Nous rappelons que l’un des objectifs de ce travail est de faire l’analyse et la synthèse
d’estimateurs d’état afin de surveiller le comportement des réseaux électriques puisqu’il
est très difficile voir impossible (pour des raisons d’accessibilité, techniques et/ou de
coût) de mesurer le nombre excessif des variables d’état dans un système de grandes
dimensions. Il est donc important de développer des capteurs logiciels pouvant produire
une estimation fiable des variables nécessaires pour le diagnostic.
Les approches de base utilisant la redondance analytique pour la détection des défauts
sont :
• Approche basée sur les observateurs
La génération des résidus à l’aide d’estimateur d’état consiste à reconstruire l’état
et par conséquent déduire la sortie estimée du processus à l’aide d’observateurs ou
des Filtres en utilisant par exemple l’observateur de Luenberger généralisé ou le
Filtre de Kalman Etendu. On définit alors l’erreur d’estimation de sortie comme
résidu. Un observateur est un modèle dynamique construit à partir des équations
du modèle du système réel. Il permet d’estimer un sous-ensemble de grandeurs
généralement non mesurables. Les observateurs considèrent l’erreur d’estimation
94
donnée par la différence entre la grandeur de sortie du modèle et celle du système
[76],[77].
• Approche basée sur l’espace de parité
Cette méthodologie est essentiellement basée sur l’hypothèse qu’un défaut se tra-
duit par la variation de l’état paramétrique du processus. Le suivi de l’évolution
de ses paramètres caractéristiques est donc un excellent moyen pour réaliser sa
surveillance. Le résidu est cette fois engendré par la différence entre les estima-
tions en ligne des paramètres du modèle d’un procédé et les paramètres nominaux
du procédé définis pour un fonctionnement normal. Cette méthode est très inté-
ressante car le pouvoir explicatif des estimations est très grand. Dans le cas de
l’estimation de paramètres ayant un sens physique, l’évolution des estimations
permet d’obtenir directement un diagnostic sur l’origine des défauts. Malheureu-
sement, les conditions d’estimation des paramètres sont très contraignantes, et le
retour aux paramètres physiques n’est pas toujours possible [78].
• Approche basée sur l’estimation des paramètres
Les méthodes d’estimation paramétrique supposent l’existence d’un modèle para-
métrique décrivant le comportement du système, mais il faut que les valeurs de
ces paramètres en fonctionnement nominal soient connues. Elles consistent alors
à identifier les paramètres caractérisant le fonctionnement réel, à partir de mesures
des entrées et des sorties du système. On dispose ainsi d’une estimation des para-
mètres du modèle, effectuée à partir des mesures prises sur le système et sur leurs
valeurs théoriques. Pour détecter l’apparition de défaillances dans le système, il
faut effectuer la comparaison entre les paramètres estimés et les paramètres théo-
riques. Comme pour les méthodes de redondance analytique, la théorie de la déci-
sion sert alors à déterminer si l’écart observé est dû à des aléas normaux du fonc-
tionnement ou à des défaillances. La différence entre les méthodes de redondance
analytique et les méthodes d’estimation paramétrique est qu’on effectue, pour les
premières, la comparaison entre l’état estimé et l’état théorique du système, alors

95
que pour les secondes, on compare les paramètres estimés aux paramètres théo-
riques du système [79].
Dans la suite de notre thèse nous nous intéressons au diagnostic des réseaux électriques
à base d’estimateur ou Observateur (tout en intégrant le filtre de Kalman Etendu [80]).
3.4.3 Résultats de Simulation pour la détection des défauts
Nous traitons dans ce qui suit la détection des défauts [81] avec une application sur
le réseau test 3 noeuds. Les résidus sont générés par :
1 Le Filtre de Kalman Etendu (F.K.E)
2 Le Filtre de Kalman Etendu utilisé comme estimateur (E.K.E), où on s’intéresse seule-
ment aux équations d’estimation et pas d’étape de prédiction.
3 La nouvelle version du filtre avec une fenêtre de mesures glissante (F.K.E-MH)
La détection est assurée par un simple test logique sur les résidus (comparaison avec 0).
Nous rappelons que le résidu est généré comme suit :
• Pour le F.K.E : rF.K.Ek = yk − ye
k
• Pour le E.K.E : rE.K.Ek = yk − ye
k
• Pour le F.K.E-MH : rF.K.E−MHk = yk−M+1 − ye
k−M+1
Avec yk les mesures réelles et yek celles estimées.
Nous présentons dans un premier temps l’évolution de V2(k) (Figure 3.15) en injectant
un défaut (défaut système) au noeud générateur 3 ,PG3= 0 (perte totale de production
d’énergie électrique) entre les itérations 1550 et 1600 avec un choix standard des ma-
trices Qk et Rk :
QF.K.Ek = QE.K.E
k = QF.K.E−MHk = 10−5I4
RF.K.Ek = RE.K.E
k = 10−3
RF.K.E−MHk = 10−3I4
(3.45)
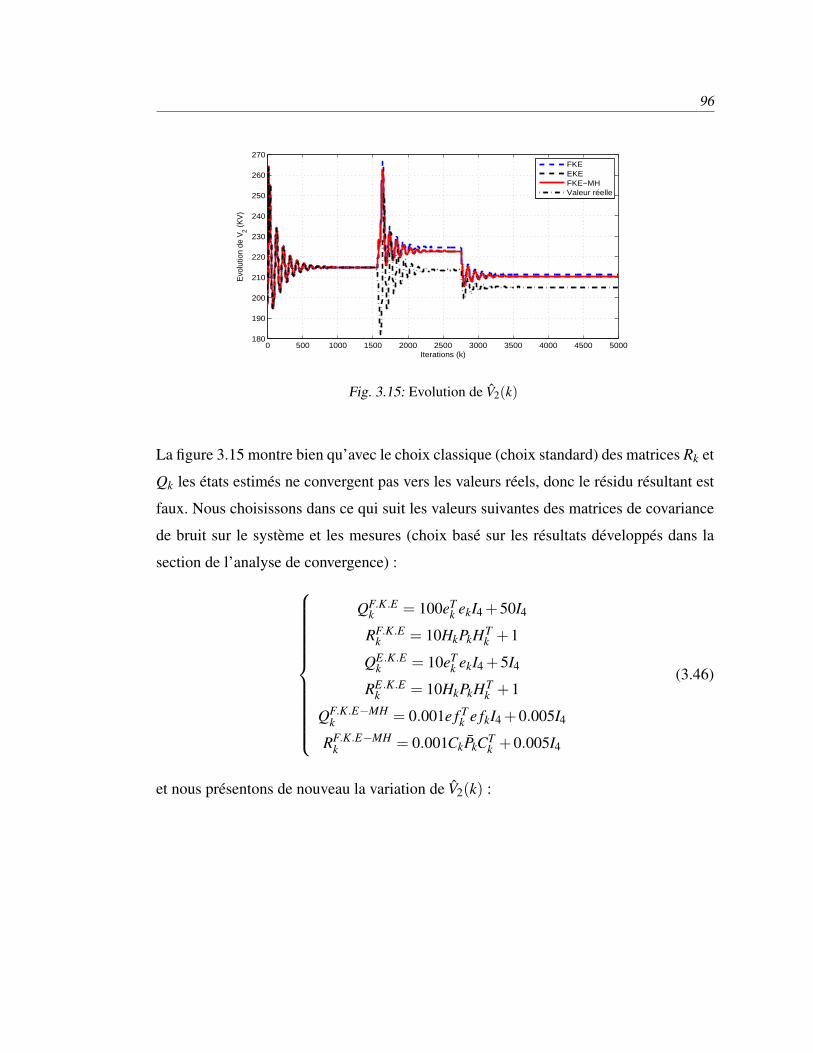
96
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000180
190
200
210
220
230
240
250
260
270
Iterations (k)
Evo
lutio
n de
V2 (K
V)
FKEEKEFKE−MHValeur réelle
Fig. 3.15: Evolution de V2(k)
La figure 3.15 montre bien qu’avec le choix classique (choix standard) des matrices Rk et
Qk les états estimés ne convergent pas vers les valeurs réels, donc le résidu résultant est
faux. Nous choisissons dans ce qui suit les valeurs suivantes des matrices de covariance
de bruit sur le système et les mesures (choix basé sur les résultats développés dans la
section de l’analyse de convergence) :
QF.K.Ek = 100eT
k ekI4 +50I4
RF.K.Ek = 10HkPkHT
k +1
QE.K.Ek = 10eT
k ekI4 +5I4
RE.K.Ek = 10HkPkHT
k +1
QF.K.E−MHk = 0.001e f T
k e fkI4 +0.005I4
RF.K.E−MHk = 0.001CkPkC
Tk +0.005I4
(3.46)
et nous présentons de nouveau la variation de V2(k) :
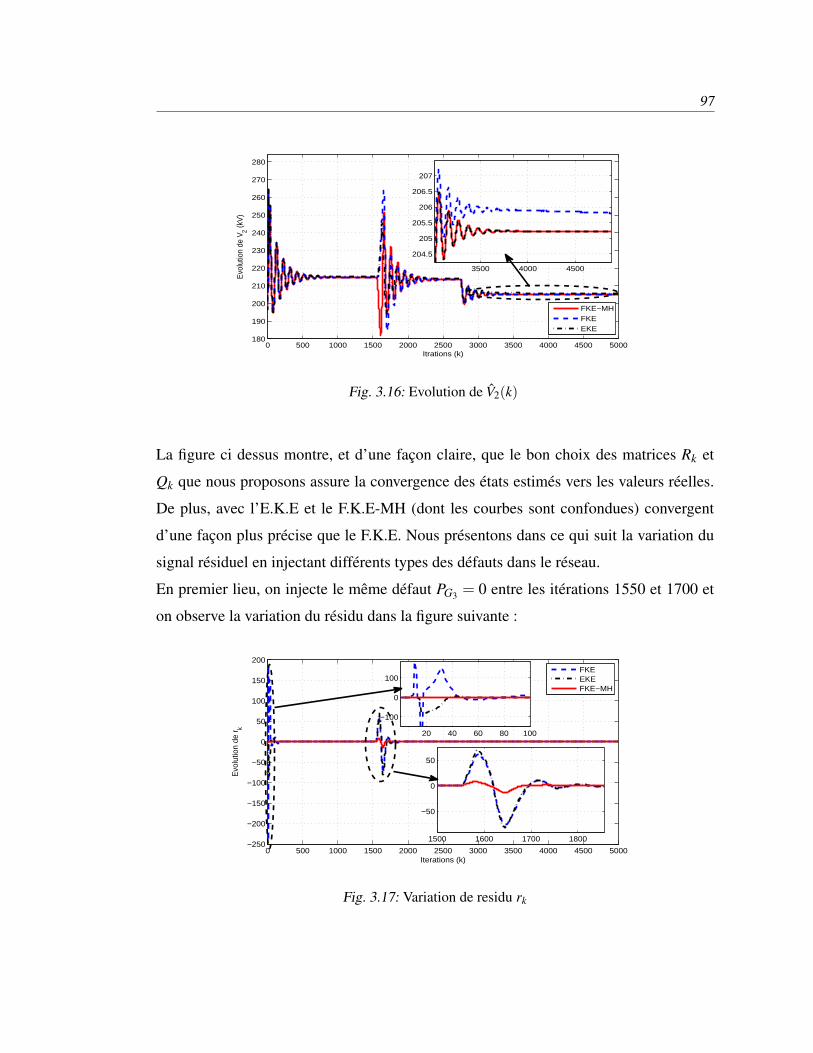
97
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000180
190
200
210
220
230
240
250
260
270
280
Itrations (k)
Evo
lutio
n de
V2 (k
V)
FKE−MHFKEEKE
3500 4000 4500
204.5
205
205.5
206
206.5
207
Fig. 3.16: Evolution de V2(k)
La figure ci dessus montre, et d’une façon claire, que le bon choix des matrices Rk et
Qk que nous proposons assure la convergence des états estimés vers les valeurs réelles.
De plus, avec l’E.K.E et le F.K.E-MH (dont les courbes sont confondues) convergent
d’une façon plus précise que le F.K.E. Nous présentons dans ce qui suit la variation du
signal résiduel en injectant différents types des défauts dans le réseau.
En premier lieu, on injecte le même défaut PG3= 0 entre les itérations 1550 et 1700 et
on observe la variation du résidu dans la figure suivante :
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000−250
−200
−150
−100
−50
0
50
100
150
200
Iterations (k)
Evo
lutio
n de
r k
20 40 60 80 100
−100
0
100
1500 1600 1700 1800
−50
0
50
FKEEKEFKE−MH
Fig. 3.17: Variation de residu rk
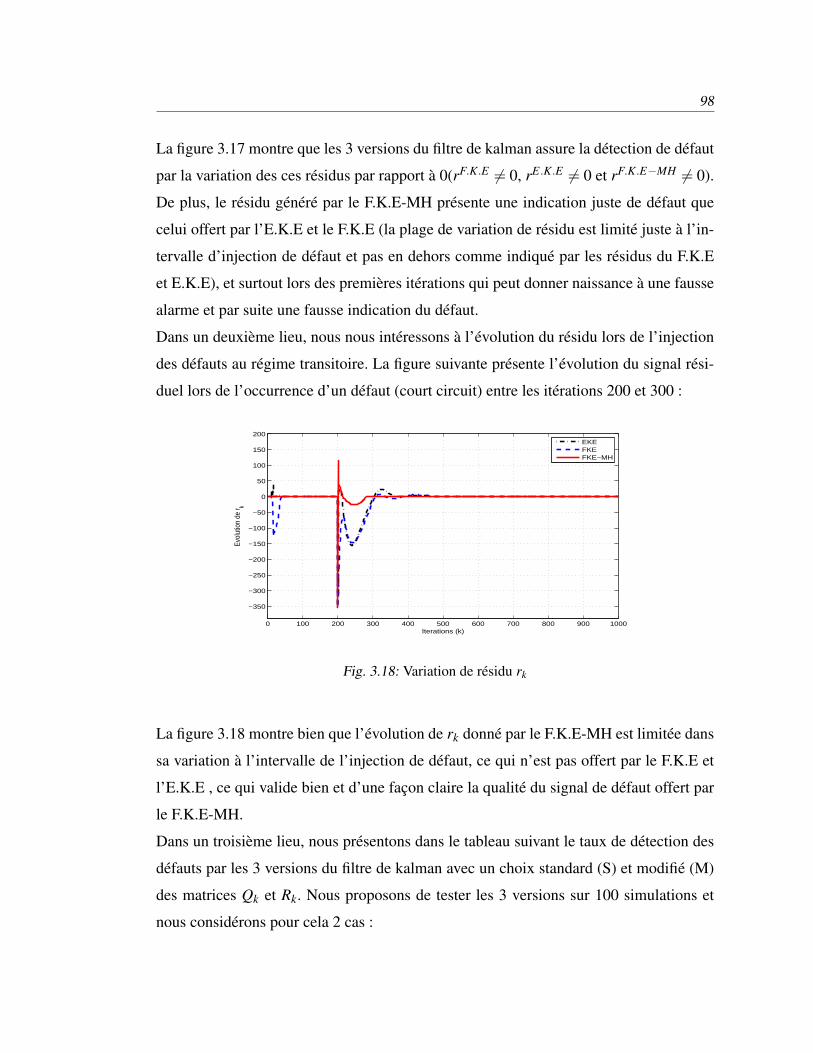
98
La figure 3.17 montre que les 3 versions du filtre de kalman assure la détection de défaut
par la variation des ces résidus par rapport à 0(rF.K.E 6= 0, rE.K.E 6= 0 et rF.K.E−MH 6= 0).
De plus, le résidu généré par le F.K.E-MH présente une indication juste de défaut que
celui offert par l’E.K.E et le F.K.E (la plage de variation de résidu est limité juste à l’in-
tervalle d’injection de défaut et pas en dehors comme indiqué par les résidus du F.K.E
et E.K.E), et surtout lors des premières itérations qui peut donner naissance à une fausse
alarme et par suite une fausse indication du défaut.
Dans un deuxième lieu, nous nous intéressons à l’évolution du résidu lors de l’injection
des défauts au régime transitoire. La figure suivante présente l’évolution du signal rési-
duel lors de l’occurrence d’un défaut (court circuit) entre les itérations 200 et 300 :
0 100 200 300 400 500 600 700 800 900 1000
−350
−300
−250
−200
−150
−100
−50
0
50
100
150
200
Iterations (k)
Evol
utio
n de
r k
EKEFKEFKE−MH
Fig. 3.18: Variation de résidu rk
La figure 3.18 montre bien que l’évolution de rk donné par le F.K.E-MH est limitée dans
sa variation à l’intervalle de l’injection de défaut, ce qui n’est pas offert par le F.K.E et
l’E.K.E , ce qui valide bien et d’une façon claire la qualité du signal de défaut offert par
le F.K.E-MH.
Dans un troisième lieu, nous présentons dans le tableau suivant le taux de détection des
défauts par les 3 versions du filtre de kalman avec un choix standard (S) et modifié (M)
des matrices Qk et Rk. Nous proposons de tester les 3 versions sur 100 simulations et
nous considérons pour cela 2 cas :
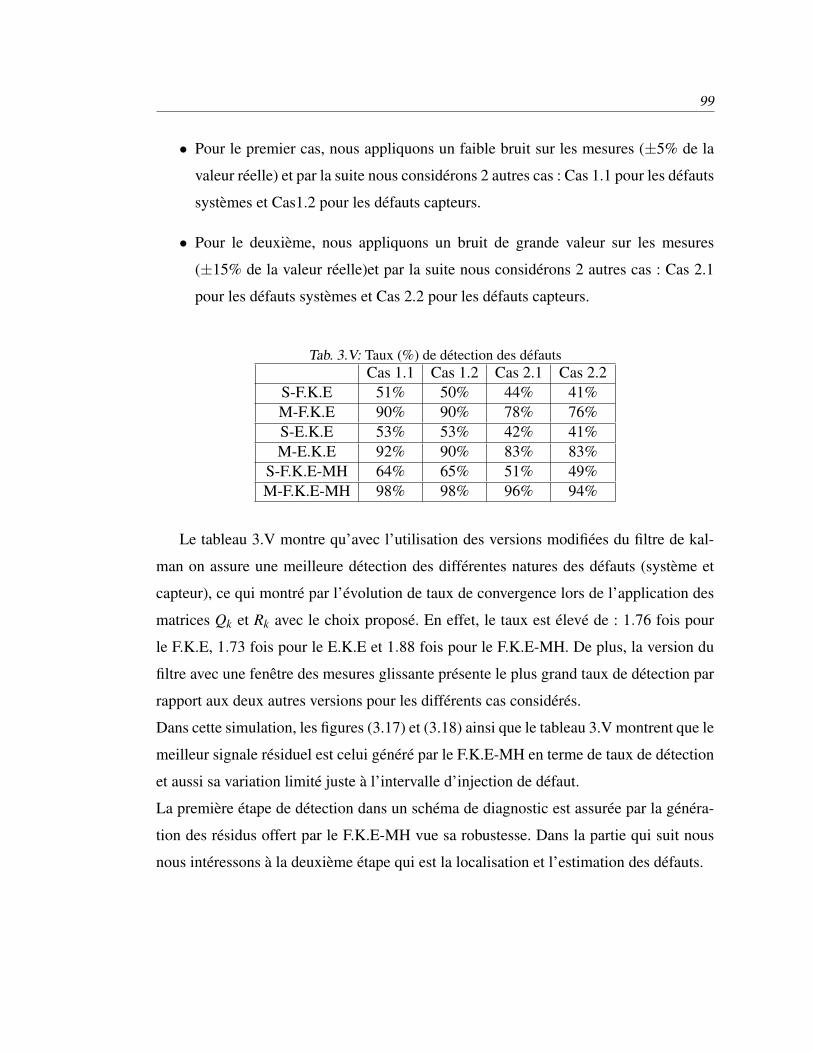
99
• Pour le premier cas, nous appliquons un faible bruit sur les mesures (±5% de la
valeur réelle) et par la suite nous considérons 2 autres cas : Cas 1.1 pour les défauts
systèmes et Cas1.2 pour les défauts capteurs.
• Pour le deuxième, nous appliquons un bruit de grande valeur sur les mesures
(±15% de la valeur réelle)et par la suite nous considérons 2 autres cas : Cas 2.1
pour les défauts systèmes et Cas 2.2 pour les défauts capteurs.
Tab. 3.V: Taux (%) de détection des défauts
Cas 1.1 Cas 1.2 Cas 2.1 Cas 2.2
S-F.K.E 51% 50% 44% 41%
M-F.K.E 90% 90% 78% 76%
S-E.K.E 53% 53% 42% 41%
M-E.K.E 92% 90% 83% 83%
S-F.K.E-MH 64% 65% 51% 49%
M-F.K.E-MH 98% 98% 96% 94%
Le tableau 3.V montre qu’avec l’utilisation des versions modifiées du filtre de kal-
man on assure une meilleure détection des différentes natures des défauts (système et
capteur), ce qui montré par l’évolution de taux de convergence lors de l’application des
matrices Qk et Rk avec le choix proposé. En effet, le taux est élevé de : 1.76 fois pour
le F.K.E, 1.73 fois pour le E.K.E et 1.88 fois pour le F.K.E-MH. De plus, la version du
filtre avec une fenêtre des mesures glissante présente le plus grand taux de détection par
rapport aux deux autres versions pour les différents cas considérés.
Dans cette simulation, les figures (3.17) et (3.18) ainsi que le tableau 3.V montrent que le
meilleur signale résiduel est celui généré par le F.K.E-MH en terme de taux de détection
et aussi sa variation limité juste à l’intervalle d’injection de défaut.
La première étape de détection dans un schéma de diagnostic est assurée par la généra-
tion des résidus offert par le F.K.E-MH vue sa robustesse. Dans la partie qui suit nous
nous intéressons à la deuxième étape qui est la localisation et l’estimation des défauts.
100
3.4.4 Localisation et Estimation des défauts dans les réseaux électriques
Dans cette partie, on s’intéresse non pas seulement à la détection (ce qui est été validé
précédemment) mais aussi à la localisation et l’estimation des défauts [82]. L’isolement
des défauts se traduit par la connaissance, pas seulement la présence d’un dysfonction-
nement suite à un défaut, mais de plus : quel est le noeud en défaut ?
Le schéma le plus adopté dans la littérature (qu’il soit le cas linéaire ou non linéaire)
est d’appliquer un banc d’observateurs dont chacun est sensible à un défaut bien appro-
prié. Dans la suite, nous proposons un schéma FDI qui contient un banc des F.K.E-MH
pour la détection et l’estimation des défauts ainsi qu’un banc de filtres de Kalman éten-
dus à entrées inconnues pour la localisation des noeuds en défauts.
3.4.4.1 Filtre de Kalman Etendu à Entrées Inconnues (U.I.E.K.F)
Dans cette partie nous proposons tout d’abord le Filtre de Kalman à Entrées Incon-
nues (U.I.K.F) dans le cas linéaire [83] puis on généralise pour le cas non linéaires.
Considérons le système linéaire discret suivant :
xk+1 = Fkxk +Bkuk +Ekdk +wk
yk+1 = Hk+1xk+1 + vk+1
(3.47)
avec : xk ∈ Rn représente le vecteur d’état ; yk ∈ R
m le vecteur de sortie ; uk ∈ Rr le
vecteur des entrées connues ; dk ∈ Rq le vecteur des entrées inconnues représentant les
distributions inconnues ou les incertitudes du modèle.
wk et vk sont les bruits sur le système et les mesure et Fk, Bk, Ek et Hk sont des matrices
connues et d’ordre approprié. L’équation du filtre, en minimisant la variance d’erreur,
est :
xk+1 = Fkxk\k +Bkuk +Lk+1(yk+1 −Hk+1xk+1\k) (3.48)

101
Dans le U.I.K.F, le gain Lk+1 doit satisfaire la condition de découplement suivante (la
même condition que celle pour les observateurs à entrées inconnues [79]) :
Lk+1Hk+1Ek = Ek (3.49)
d’aprés [79], l’équation 3.49 admet une solution si et seulement si :
rank(Hk+1Ek) = rank(Ek) = q (3.50)
La condition (3.50) signifie que les distributions peuvent être découplées si leur dimen-
sion est inférieure à celle des mesures. En se basant sur l’équation 3.49, le gain optimale
du filtre Lk+1 peut être obtenu en résolvant un problème d’optimisation avec contraintes.
D’autres formulations [84] ainsi qu’une version améliorée [85] existent.
Dans ce qui suit, nous présentons une extension de UIKF en s’inspirant de F.K.E pour le
cas non linéaire [86].
Soit le système non linéaire à temps discret avec des distributions inconnues suivant :
xk+1 = f (xk,uk)+E(xk)dk +wk
yk+1 = h(xk+1,uk+1)+ vk+1
(3.51)
avec : f , h et E sont des fonctions connues. Donc d’une façon similaire au F.K.E, on fait
l’extension de l’U.I.K.F au système 3.51 comme suit :
xk+1\k = f (xk\k,uk) (3.52)
Pk+1\k = FkPk\kFTk +Qk (3.53)
xk+1\k+1 = f (xk+1\k,uk)+Lk+1(yk+1 −h(xk+1\k,uk+1) (3.54)
Pk+1\k+1 = (I −Kk+1Hk+1)Pk+1\k +ηk+1Πk+1Vk+1ΠTk+1ηT
k+1 (3.55)
Avec :
Lk+1 = Kk+1 +ηk+1Πk+1 (3.56)
102
Kk+1 = Pk+1\kHTk+1V−1
k+1 (3.57)
ηk+1 = (I −Kk+1Hk+1)Ek (3.58)
Πk+1 = [(Hk+1Ek)TV−1
k+1(Hk+1Ek)]−1(Hk+1Ek)
TV−1k+1 (3.59)
Vk+1 = Hk+1Pk+1\kHTk+1 +Rk+1 (3.60)
Où :
Fk =∂ f
∂x|xk\k,uk
(3.61)
Hk+1 =∂h
∂x|xk+1\k,uk+1
(3.62)
Ek = E(xk\k) (3.63)
En faisant une comparaison au cas linéaire, le U.I.E.K.F est différent en terme de cal-
cul des matrices Fk et Hk+1 (comme celle du F.K.E) et E(xk) est substitué par l’estimé Ek.
Analyse de Convergence de U.I.E.K.F :
Les mêmes conditions que nous venons de proposées pour le F.K.E, E.K.E et le
F.K.E-MH, se généralisent pour l’U.I.E.K.F. On pose :
xk\k = xk − xk\k
xk+1\k = βkFkxk\k
αk+1ek+1 = Hk+1xk+1\k
βk = diag(β1k, ...,β(nd+na)k)
αk+1 = diag(α1k+1, ...,αmk+1)
(3.64)
Ce qui conduit à l’extension suivante du théorème proposé précédemment :
Théorème 3.4.1. 1. le système (3.47) est A-Uniformément et localement observable
au sens du rang, donc il existe k ≥ A−1 tel que le rang de la matrice d’observa-

103
bilité est :
rank(O(k−A+1,k)) =
Hk−A+1
Hk−A+2Fk−A+1
....
HkFk−1...Fk−A+1
= (nd +na) (3.65)
dans la pratique, on utilise un test numérique pour le calcul du rang de O(k−A+
1,k).
2. Fk, Hk sont des matrices uniformément bornées et F−1k existe.
3. les matrices Qk et Rk sont choisies tel que :
• Pour le U.I.E.K.F :
Qk = γeTk ekInd+na
+λ Ind+na
Rk = ςHk+1Pk+1/kHTk+1 + τIm
(3.66)
où : γ doit être choisies suffisamment large et positive, λ un scalaire positif
mais de très petite valeur et ς et τ des scalaires positifs fixé par l’utilisateur.
Pour les matrices Rk et Qk, leur choix est basé sur la résolution (ou determination des
conditions satisfaisantes) de :
γ ′Tk+1Nk+1γ ′k+1 < 0
avec :
Nk+1 =V−1k+1[Πk+1 − Ind+na
]
γ ′k+1 = αk+1Hk+1Fkxk\k
et la vérification de :
rank(Hk+1Tk) = rank(Tk) = q
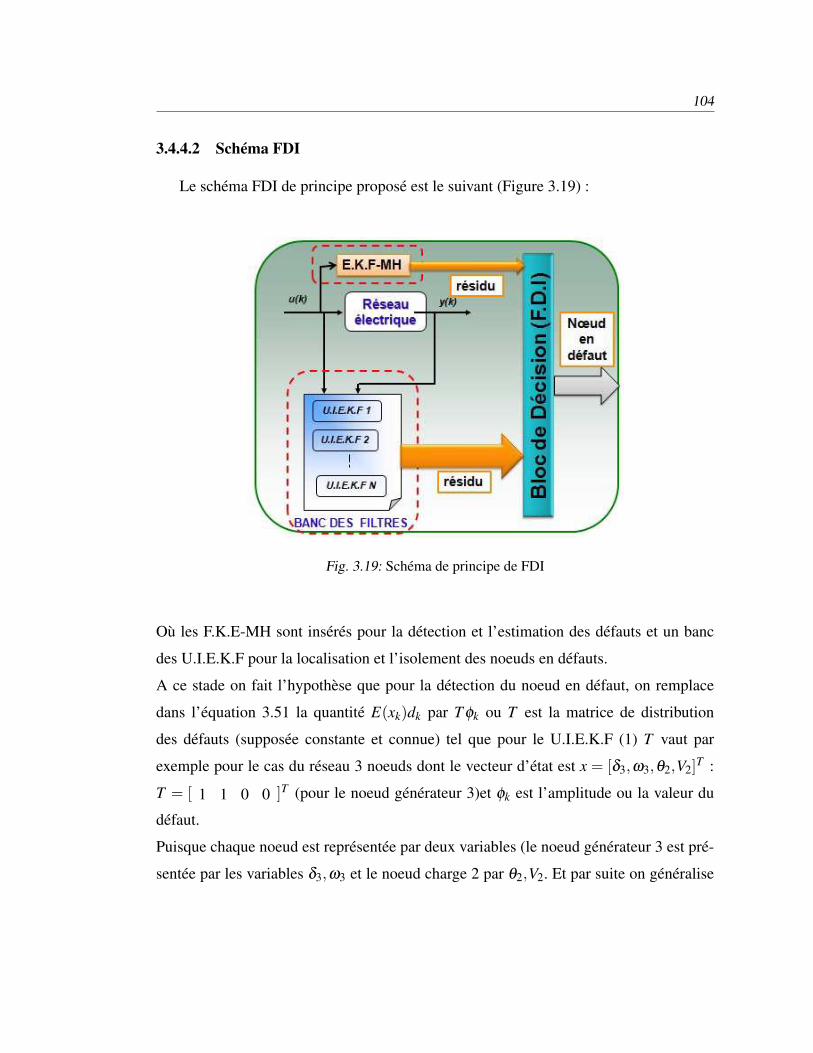
104
3.4.4.2 Schéma FDI
Le schéma FDI de principe proposé est le suivant (Figure 3.19) :
Fig. 3.19: Schéma de principe de FDI
Où les F.K.E-MH sont insérés pour la détection et l’estimation des défauts et un banc
des U.I.E.K.F pour la localisation et l’isolement des noeuds en défauts.
A ce stade on fait l’hypothèse que pour la détection du noeud en défaut, on remplace
dans l’équation 3.51 la quantité E(xk)dk par T φk ou T est la matrice de distribution
des défauts (supposée constante et connue) tel que pour le U.I.E.K.F (1) T vaut par
exemple pour le cas du réseau 3 noeuds dont le vecteur d’état est x = [δ3,ω3,θ2,V2]T :
T = [ 1 1 0 0 ]T (pour le noeud générateur 3)et φk est l’amplitude ou la valeur du
défaut.
Puisque chaque noeud est représentée par deux variables (le noeud générateur 3 est pré-
sentée par les variables δ3,ω3 et le noeud charge 2 par θ2,V2. Et par suite on généralise

105
pour un réseau de n noeuds dont le vecteur d’état est comme suit :
x = [δi,ωi,θi,Vi]T
et pour localiser les défauts au noeud i, T est choisie :
• Pour les noeuds générateurs :
x = [ δi ωi θi Vi]T
T = [ 1 1 0 . . .0]T(3.67)
puisque chaque noeud générateur est représenté par : δi et ωi
• Pour les noeuds charges :
x = [ δi ωi θi Vi]T
T = [ 0 . . .0 1 1]T(3.68)
puisque chaque noeud charge est représenté par : θi et Vi
Il faut noter qu’on s’intéresse à la localisation des défauts dans un noeud bien appro-
prié et pas aux paramètres. De plus, le choix spécifique de T que nous proposons est dû
principalement à la vérification de la condition : rang(Hk+1Tk) = rank(Tk) = q.
Ensuite, en considérant que ei est le résidu généré par le U.I.E.K.F i, le test logique pour
localiser le noeud en défaut est le suivant :
1. Si ‖ei‖> ‖e j‖ donc le noeud i est en défaut.
2. Si ‖ei‖< ‖e j‖ donc le noeud j est en défaut.
3. Si ‖ei‖ = ‖er‖ donc c’est un défaut entre les noeuds i et r (avec r présente les
noeuds en liaison électrique direct avec le noeud i).
3.4.4.3 Résultats de Simulation pour la localisation des défauts
Notre étude est appliquée sur le réseau test 3 noeuds. On dispose donc, d’un seul
F.K.E-MH (puisqu’on a une seule sortie) de deux étages de U.I.E.K.F et par suite on

106
définit :T1 = [ 1 1 0 0 ] pour le noeud 3 et T2 = [ 0 0 1 1 ] pour le noeud 2.
Nous considérons 3 types des défauts dans cette simulation :
• Perte de puissance électrique délivré par l’alternateur : φ 2k =−PG3
(k) et appliquée
dans l’expression de x2(k).
• Court-circuit dans le noeud charge 2 : φ 3k =−0.8V2(k) appliqué dans l’expression
de x4(k).
• Coupure (perte) de ligne entre les noeuds 3 et 2 : φ 4k . Ce défaut est formé en
admettant que la partie réelle et imaginaire de la matrice d’admittance nodale entre
les noeuds 3 et 2 sont égales à 0 (G3,2 =B3,2 =G2,3 =B2,3 = 0 dans les expressions
de x2(k), x3(k) et x4(k)).
Pour simplifier, nous ne considérons aucune autre distribution inconnue (dk = 0 et nous
remplaçons Ek dans les équations 3.58, 3.59 et 3.63 par T i). La localisation sera assurée
par la vérification du test logique déjà présenté.
En premier lieu on s’intéresse à la stabilité et la convergence des deux version du Filtre
de Kalman (U.I.E.K.F et le F.K.E-MH), pour cela on prend :
QU.I.E.K.Fk = QE.K.F−MH
k = 10−5I4
RU.I.E.K.Ek = 10−3
RE.K.F−MHk = 10−3I4
(3.69)
en les considérant comme constantes ou sans correction (version standard : S-U.I.E.K.F
/ S-F.K.E-M.H), et les valeurs avec corrections (version modifiée : M-U.I.E.K.F / M-
F.K.E-M.H) suivantes :
QU.I.E.K.Fk = 100eT
k ekI4 +0.5I4
RU.I.E.K.Fk = 0.01HkPkHT
k +0.05
QF.K.E−MHk = 0.001e f T
k e fkI4 +0.005I4
RF.K.E−MHk = 0.001CkPkC
Tk +0.005I4
(3.70)

107
Ensuite, on fait un test pour 100 simulations, en variant les valeurs initiales (de l’ordre
de ±20% des valeurs finales) et en ajoutant un bruit de grande variance sur les mesures
(±20% de la valeur réelle). On présente dans le Tableau 3.VI le taux de convergence des
deux versions des filtres utilisés (Standard et Modifiée) :
Tab. 3.VI: convergence (%) avec des valeurs initiales aléatoires
Observateur taux de convergence (%)
S-U.I.E.K.F 50%
S-F.K.E-M.H 51%
M-U.I.E.K.F 94%
M-F.K.E-M.H 96%
Il est claire, d’après le tableau 3.VI, que le choix proposé des matrices Qk et Rk sui-
vant les conditions présentées, dans la section Analyse de Convergence, assure bien la
convergence (la version modifiée améliore presque 2 fois le taux de convergence que
celle standard). Dans un deuxième lieu, on s’intéresse à la localisation des défauts sui-
vant le test logique déjà présenté tout en injectant un bruit sur les mesures et le système
de l’ordre de ±5%.
Dans un premier temps, on injecte le deuxième défaut (φ 2k ) dans le noeud 3 en posant
PG3= 0 entre les itérations 1450 et 2150, et on visualise l’évolution des différents rési-
dus :
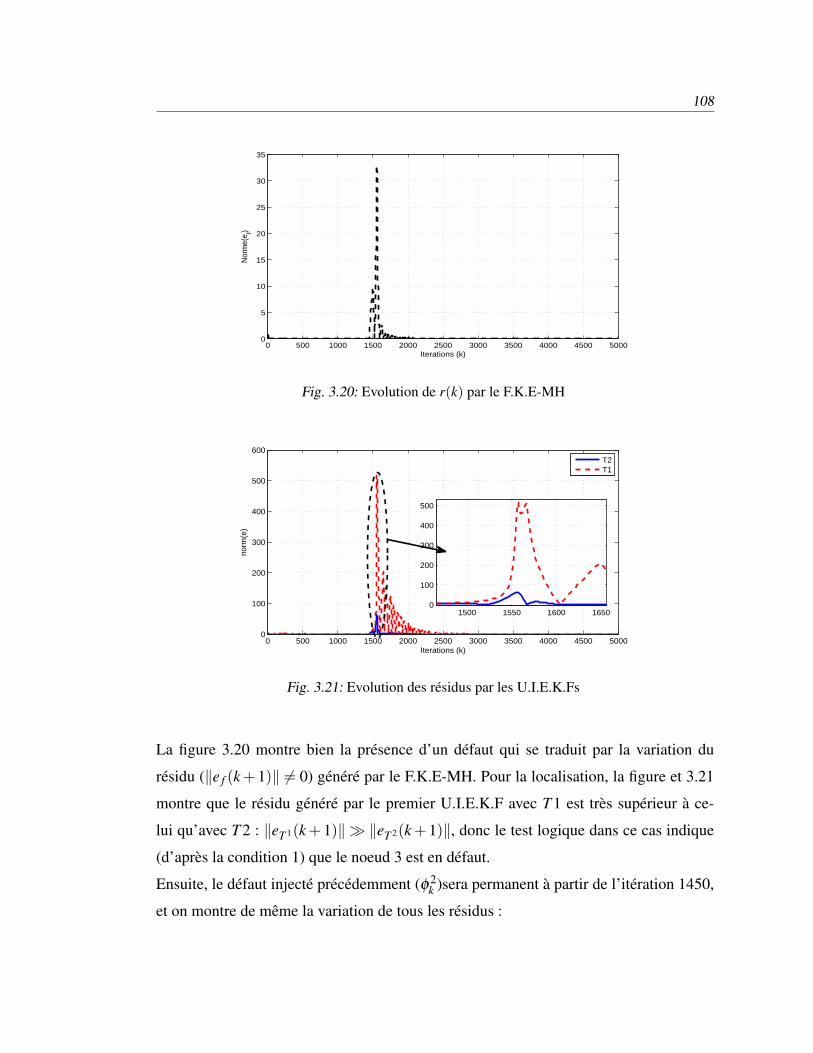
108
0 500 1000 1500 2000 2500 3000 3500 4000 4500 50000
5
10
15
20
25
30
35
Iterations (k)
Nor
me(
e f)
Fig. 3.20: Evolution de r(k) par le F.K.E-MH
0 500 1000 1500 2000 2500 3000 3500 4000 4500 50000
100
200
300
400
500
600
Iterations (k)
norm
(e)
T2T1
1500 1550 1600 16500
100
200
300
400
500
Fig. 3.21: Evolution des résidus par les U.I.E.K.Fs
La figure 3.20 montre bien la présence d’un défaut qui se traduit par la variation du
résidu (‖e f (k+1)‖ 6= 0) généré par le F.K.E-MH. Pour la localisation, la figure et 3.21
montre que le résidu généré par le premier U.I.E.K.F avec T 1 est très supérieur à ce-
lui qu’avec T 2 : ‖eT 1(k+ 1)‖ ≫ ‖eT 2(k+ 1)‖, donc le test logique dans ce cas indique
(d’après la condition 1) que le noeud 3 est en défaut.
Ensuite, le défaut injecté précédemment (φ 2k )sera permanent à partir de l’itération 1450,
et on montre de même la variation de tous les résidus :
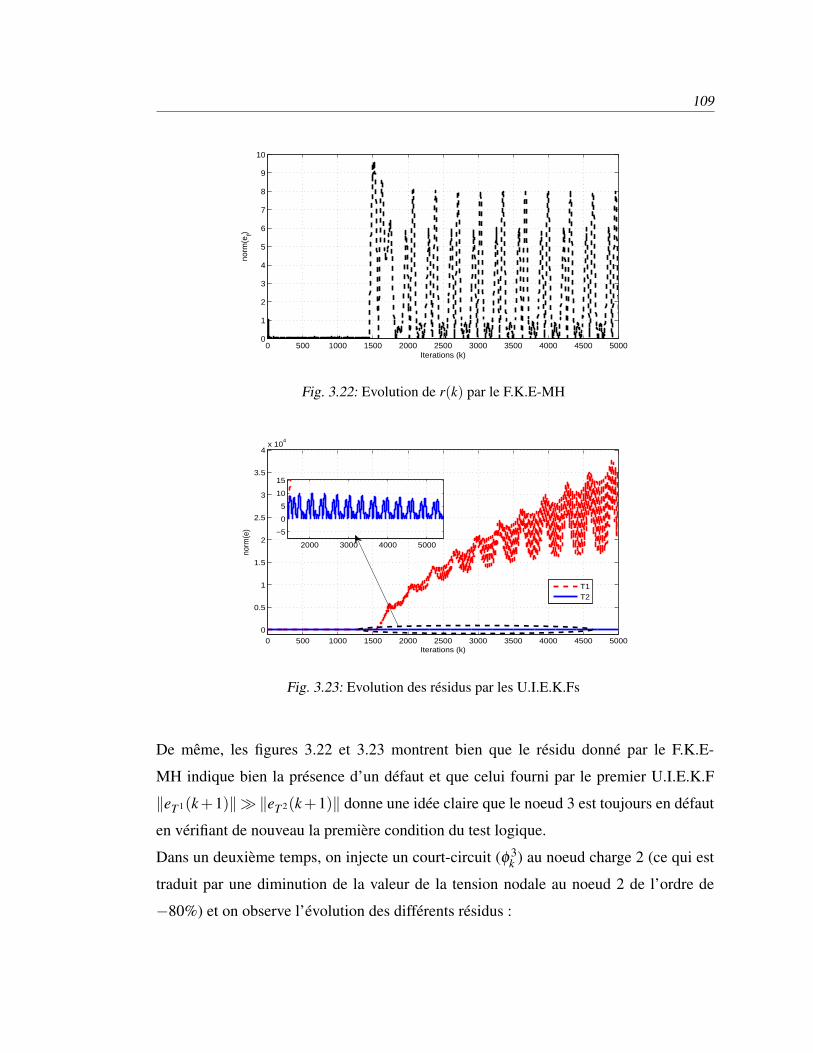
109
0 500 1000 1500 2000 2500 3000 3500 4000 4500 50000
1
2
3
4
5
6
7
8
9
10
Iterations (k)
norm
(ef)
Fig. 3.22: Evolution de r(k) par le F.K.E-MH
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000
0
0.5
1
1.5
2
2.5
3
3.5
4x 10
4
Iterations (k)
norm
(e)
2000 3000 4000 5000
−5
0
5
10
15
T1T2
Fig. 3.23: Evolution des résidus par les U.I.E.K.Fs
De même, les figures 3.22 et 3.23 montrent bien que le résidu donné par le F.K.E-
MH indique bien la présence d’un défaut et que celui fourni par le premier U.I.E.K.F
‖eT 1(k+1)‖≫ ‖eT 2(k+1)‖ donne une idée claire que le noeud 3 est toujours en défaut
en vérifiant de nouveau la première condition du test logique.
Dans un deuxième temps, on injecte un court-circuit (φ 3k ) au noeud charge 2 (ce qui est
traduit par une diminution de la valeur de la tension nodale au noeud 2 de l’ordre de
−80%) et on observe l’évolution des différents résidus :
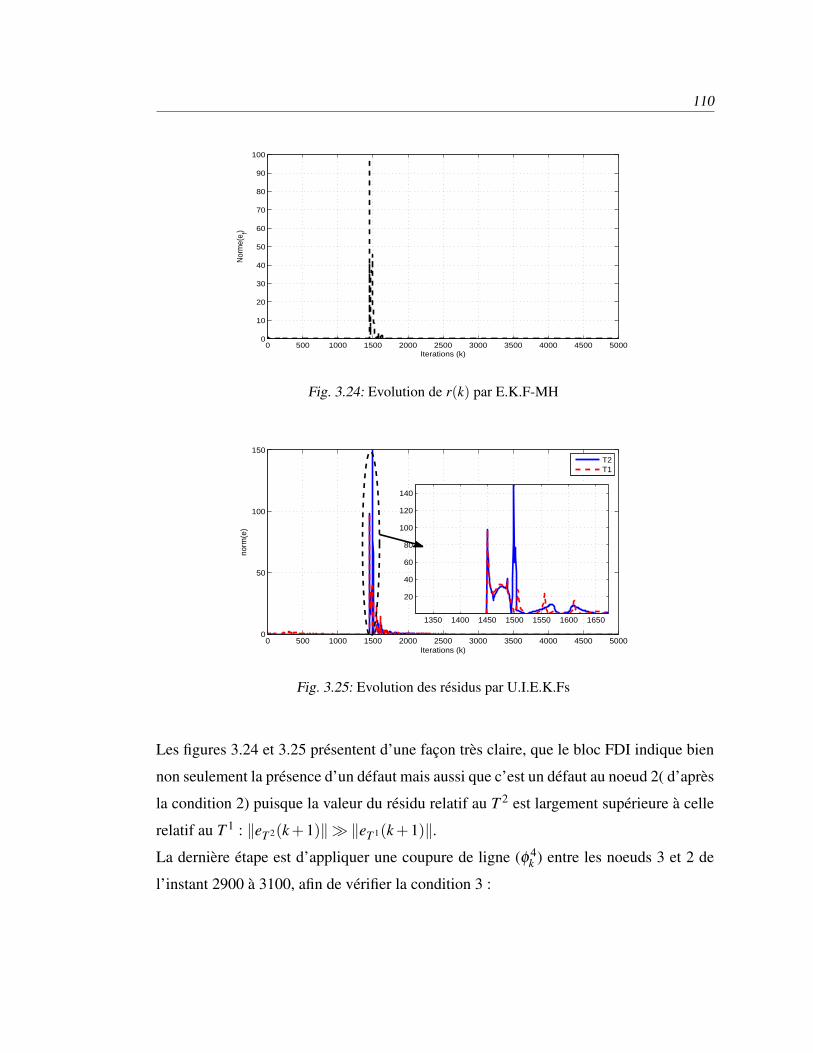
110
0 500 1000 1500 2000 2500 3000 3500 4000 4500 50000
10
20
30
40
50
60
70
80
90
100
Iterations (k)
Nor
me(
e f)
Fig. 3.24: Evolution de r(k) par E.K.F-MH
0 500 1000 1500 2000 2500 3000 3500 4000 4500 50000
50
100
150
Iterations (k)
norm
(e)
T2T1
1350 1400 1450 1500 1550 1600 1650
20
40
60
80
100
120
140
Fig. 3.25: Evolution des résidus par U.I.E.K.Fs
Les figures 3.24 et 3.25 présentent d’une façon très claire, que le bloc FDI indique bien
non seulement la présence d’un défaut mais aussi que c’est un défaut au noeud 2( d’après
la condition 2) puisque la valeur du résidu relatif au T 2 est largement supérieure à celle
relatif au T 1 : ‖eT 2(k+1)‖≫ ‖eT 1(k+1)‖.
La dernière étape est d’appliquer une coupure de ligne (φ 4k ) entre les noeuds 3 et 2 de
l’instant 2900 à 3100, afin de vérifier la condition 3 :
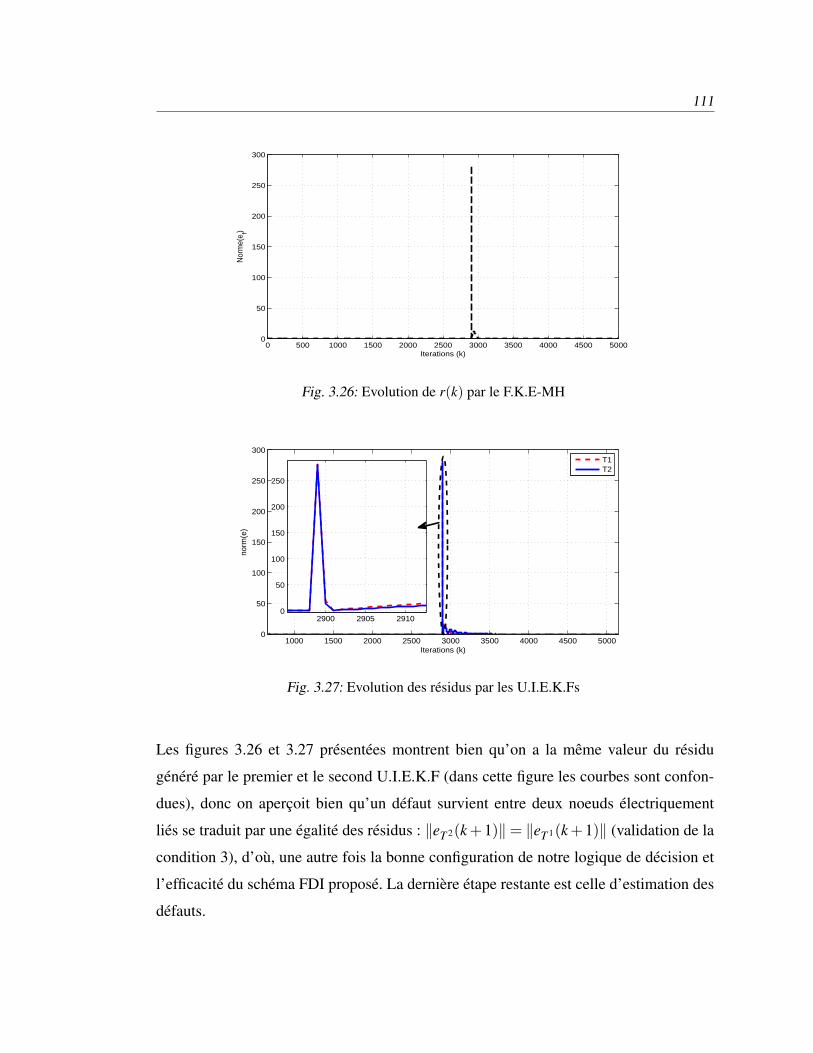
111
0 500 1000 1500 2000 2500 3000 3500 4000 4500 50000
50
100
150
200
250
300
Iterations (k)
Nor
me(
e f)
Fig. 3.26: Evolution de r(k) par le F.K.E-MH
1000 1500 2000 2500 3000 3500 4000 4500 50000
50
100
150
200
250
300
Iterations (k)
norm
(e)
T1T2
2900 2905 29100
50
100
150
200
250
Fig. 3.27: Evolution des résidus par les U.I.E.K.Fs
Les figures 3.26 et 3.27 présentées montrent bien qu’on a la même valeur du résidu
généré par le premier et le second U.I.E.K.F (dans cette figure les courbes sont confon-
dues), donc on aperçoit bien qu’un défaut survient entre deux noeuds électriquement
liés se traduit par une égalité des résidus : ‖eT 2(k+1)‖= ‖eT 1(k+1)‖ (validation de la
condition 3), d’où, une autre fois la bonne configuration de notre logique de décision et
l’efficacité du schéma FDI proposé. La dernière étape restante est celle d’estimation des
défauts.
112
3.4.4.4 Estimation de défauts dans les réseaux électriques
Pour l’estimation des défauts basée sur la connaissance du modèle, il existe quelques
travaux dont on cite principalement : observateur à mode glissant [87], neuro-floue ap-
proximation [88] ou des observateurs adaptatifs pour le diagnostic des défauts (A.F.D.O)
[89]. Mais, la plus part des méthodes sont basées sur le Filtre de Kalman [90] [91] [92].
Dans ce qui suit, on se focalise sur l’estimation des chutes de tension et celles des courts-
circuits [93]. Soit le modèle dynamique suivant :
xk+1 = f (xk,uk,χk)+ vk
yk = h(xk,uk)+wk
(3.71)
avec χk ∈Rnχ présente la valeur du défaut à estimer (χ i
k = 1 en mode normale et χ ik 6= 1
en présence d’un dysfonctionnement). Le modèle dynamique augmenté du réseau élec-
trique avec χk est :
xak+1 =
δk+1
ωk+1
θk+1
Vk+1
χk+1
=
δk +Te f1(δk,ωk,θk,Vk,uk)
ωk +Te f2(δk,ωk,θk,Vk,uk)
θk +Te f3(δk,ωk,θk,Vk,uk)
χk(Vk +Te f4(δk,ωk,θk,Vk,uk))
χk
(3.72)
avec f (xd,xa,u) = [ f1 f2 f3 f4 ] donnée par l’expression 3.7 et la matrice Jaco-
bienne augmentée est donnée par :
Fak = Fa(xa
k ,uk) =
Fk Vk +Te f4(δk,ωk,θk,Vk,uk)
0 Inχ
(3.73)
Après cette formulation, on applique une version du Filtre de Kalman Etendu (E.K.E ou
l’E.K.F-M.H). Pour l’analyse de convergence, on procède de la même façon.
Théorème 3.4.2. 1. Le système (3.47) est A-Uniformément et localement observable
au sens du rang, donc il existe k ≥ A−1 tel que le rang de la matrice d’observa-

113
bilité est :
rank(O(k−A+1,k)) =
Hk−A+1
Hk−A+2Fak−A+1
....
HkFak−1...F
ak−A+1
= (nd +na +nχ) (3.74)
dans la pratique, on utilise un test numérique pour le calcul du rang de O(k−A+
1,k).
2. Fak , Hk sont des matrices uniformément bornées et Fa−1
k existe.
3. Les matrices Qk et Rk sont choisies tel que :
Qk = γeTk ekInd+na+nχ +λ Ind+na+nχ
Rk = ςHk+1Pk+1/kHTk+1 + τIm
(3.75)
où : γ doit être choisies suffisamment large et positive, λ un scalaire positif mais
de très petite valeur et ς et τ des scalaires positifs fixé par l’utilisateur.
De même pour le F.K.E-M.H.
3.4.4.5 Résultats de Simulation pour l’Estimation des défauts
On traite de nouveau le réseau test IEEE 3 noeuds avec l’E.K.E et le F.K.E-M.H
(étude comparative). Les mesures sont générées en ajoutant un bruit de faible valeur
(±5% de la valeur réelle). De la même manière que dans les exemples précédents, la
figure 3.28 montre l’évolution du rang de la matrice d’observabilité (calcul numérique
avec A = 4).
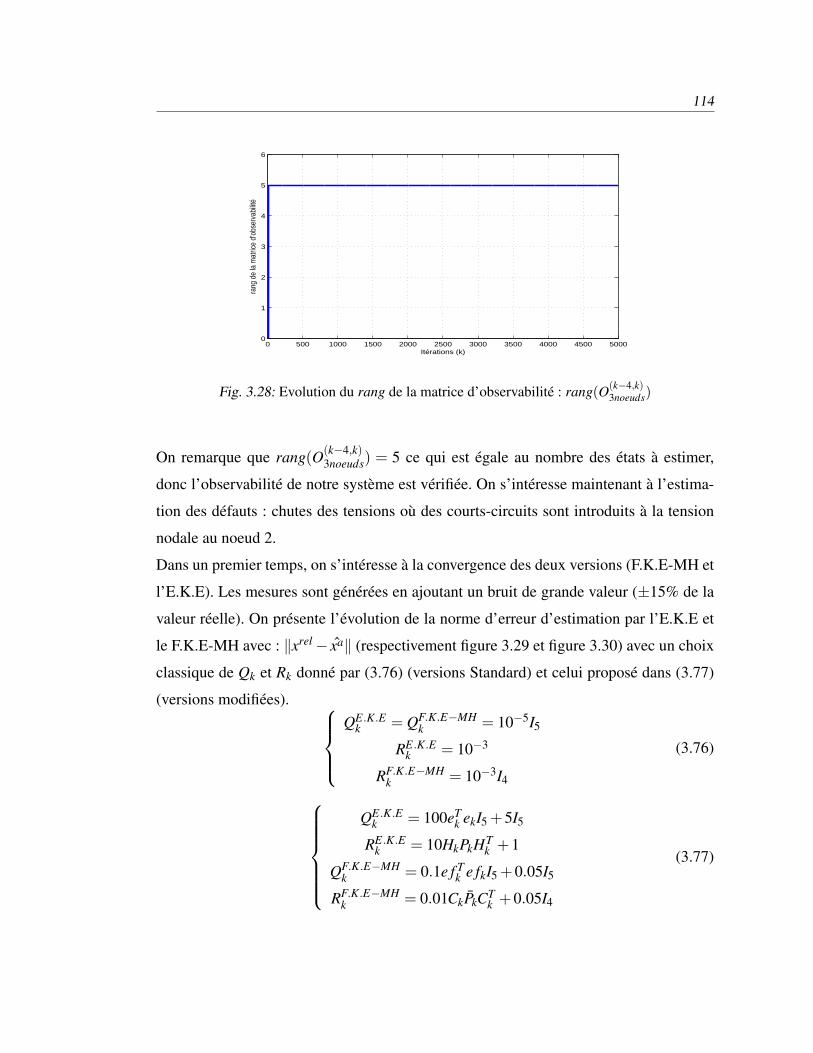
114
0 500 1000 1500 2000 2500 3000 3500 4000 4500 50000
1
2
3
4
5
6
Itérations (k)
rang
de
la m
atric
e d’
obse
rvab
ilité
Fig. 3.28: Evolution du rang de la matrice d’observabilité : rang(O(k−4,k)3noeuds)
On remarque que rang(O(k−4,k)3noeuds) = 5 ce qui est égale au nombre des états à estimer,
donc l’observabilité de notre système est vérifiée. On s’intéresse maintenant à l’estima-
tion des défauts : chutes des tensions où des courts-circuits sont introduits à la tension
nodale au noeud 2.
Dans un premier temps, on s’intéresse à la convergence des deux versions (F.K.E-MH et
l’E.K.E). Les mesures sont générées en ajoutant un bruit de grande valeur (±15% de la
valeur réelle). On présente l’évolution de la norme d’erreur d’estimation par l’E.K.E et
le F.K.E-MH avec : ‖xrel − xa‖ (respectivement figure 3.29 et figure 3.30) avec un choix
classique de Qk et Rk donné par (3.76) (versions Standard) et celui proposé dans (3.77)
(versions modifiées).
QE.K.Ek = QF.K.E−MH
k = 10−5I5
RE.K.Ek = 10−3
RF.K.E−MHk = 10−3I4
(3.76)
QE.K.Ek = 100eT
k ekI5 +5I5
RE.K.Ek = 10HkPkHT
k +1
QF.K.E−MHk = 0.1e f T
k e fkI5 +0.05I5
RF.K.E−MHk = 0.01CkPkC
Tk +0.05I4
(3.77)
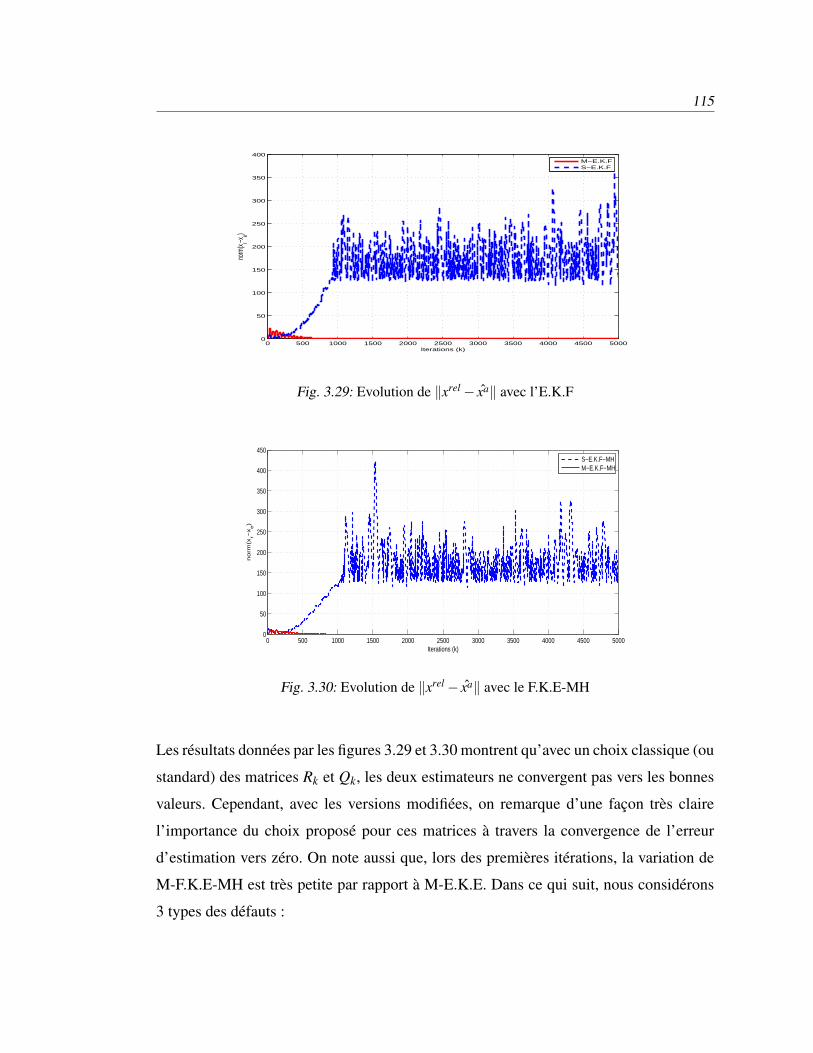
115
0 500 1000 1500 2000 2500 3000 3500 4000 4500 50000
50
100
150
200
250
300
350
400
Iterations (k)
norm
(x r−xe)
M−E.K.FS−E.K.F
Fig. 3.29: Evolution de ‖xrel − xa‖ avec l’E.K.F
0 500 1000 1500 2000 2500 3000 3500 4000 4500 50000
50
100
150
200
250
300
350
400
450
Iterations (k)
no
rm(x
r−x
e)
S−E.K.F−MHM−E.K.F−MH
Fig. 3.30: Evolution de ‖xrel − xa‖ avec le F.K.E-MH
Les résultats données par les figures 3.29 et 3.30 montrent qu’avec un choix classique (ou
standard) des matrices Rk et Qk, les deux estimateurs ne convergent pas vers les bonnes
valeurs. Cependant, avec les versions modifiées, on remarque d’une façon très claire
l’importance du choix proposé pour ces matrices à travers la convergence de l’erreur
d’estimation vers zéro. On note aussi que, lors des premières itérations, la variation de
M-F.K.E-MH est très petite par rapport à M-E.K.E. Dans ce qui suit, nous considérons
3 types des défauts :
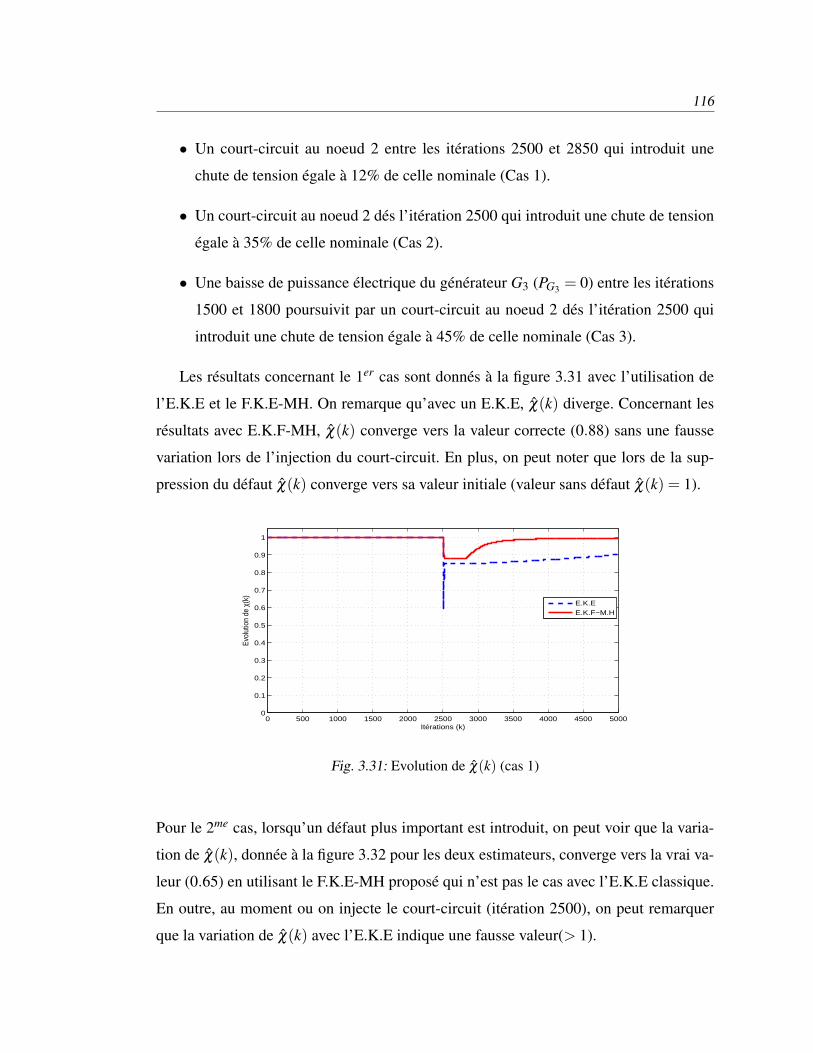
116
• Un court-circuit au noeud 2 entre les itérations 2500 et 2850 qui introduit une
chute de tension égale à 12% de celle nominale (Cas 1).
• Un court-circuit au noeud 2 dés l’itération 2500 qui introduit une chute de tension
égale à 35% de celle nominale (Cas 2).
• Une baisse de puissance électrique du générateur G3 (PG3= 0) entre les itérations
1500 et 1800 poursuivit par un court-circuit au noeud 2 dés l’itération 2500 qui
introduit une chute de tension égale à 45% de celle nominale (Cas 3).
Les résultats concernant le 1er cas sont donnés à la figure 3.31 avec l’utilisation de
l’E.K.E et le F.K.E-MH. On remarque qu’avec un E.K.E, χ(k) diverge. Concernant les
résultats avec E.K.F-MH, χ(k) converge vers la valeur correcte (0.88) sans une fausse
variation lors de l’injection du court-circuit. En plus, on peut noter que lors de la sup-
pression du défaut χ(k) converge vers sa valeur initiale (valeur sans défaut χ(k) = 1).
0 500 1000 1500 2000 2500 3000 3500 4000 4500 50000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Itérations (k)
Evol
utio
n de
χ(k
)
E.K.EE.K.F−M.H
Fig. 3.31: Evolution de χ(k) (cas 1)
Pour le 2me cas, lorsqu’un défaut plus important est introduit, on peut voir que la varia-
tion de χ(k), donnée à la figure 3.32 pour les deux estimateurs, converge vers la vrai va-
leur (0.65) en utilisant le F.K.E-MH proposé qui n’est pas le cas avec l’E.K.E classique.
En outre, au moment ou on injecte le court-circuit (itération 2500), on peut remarquer
que la variation de χ(k) avec l’E.K.E indique une fausse valeur(> 1).
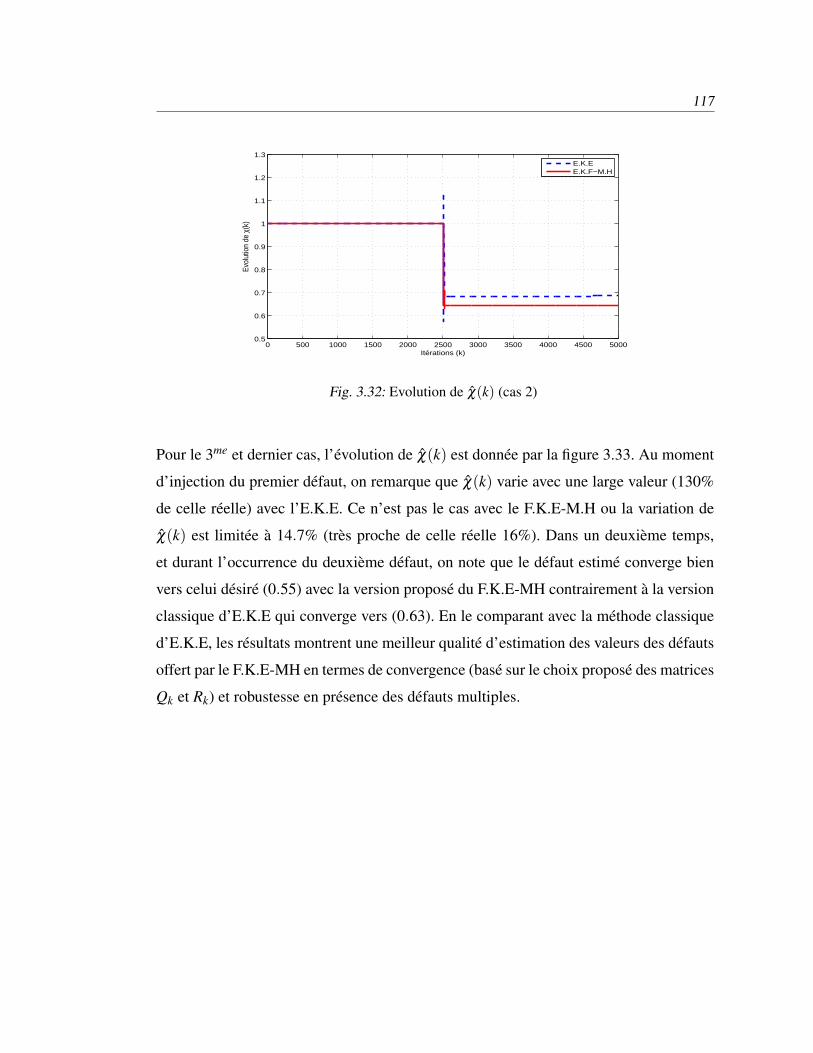
117
0 500 1000 1500 2000 2500 3000 3500 4000 4500 50000.5
0.6
0.7
0.8
0.9
1
1.1
1.2
1.3
Itérations (k)
Evol
utio
n de
χ(k
)
E.K.EE.K.F−M.H
Fig. 3.32: Evolution de χ(k) (cas 2)
Pour le 3me et dernier cas, l’évolution de χ(k) est donnée par la figure 3.33. Au moment
d’injection du premier défaut, on remarque que χ(k) varie avec une large valeur (130%
de celle réelle) avec l’E.K.E. Ce n’est pas le cas avec le F.K.E-M.H ou la variation de
χ(k) est limitée à 14.7% (très proche de celle réelle 16%). Dans un deuxième temps,
et durant l’occurrence du deuxième défaut, on note que le défaut estimé converge bien
vers celui désiré (0.55) avec la version proposé du F.K.E-MH contrairement à la version
classique d’E.K.E qui converge vers (0.63). En le comparant avec la méthode classique
d’E.K.E, les résultats montrent une meilleur qualité d’estimation des valeurs des défauts
offert par le F.K.E-MH en termes de convergence (basé sur le choix proposé des matrices
Qk et Rk) et robustesse en présence des défauts multiples.
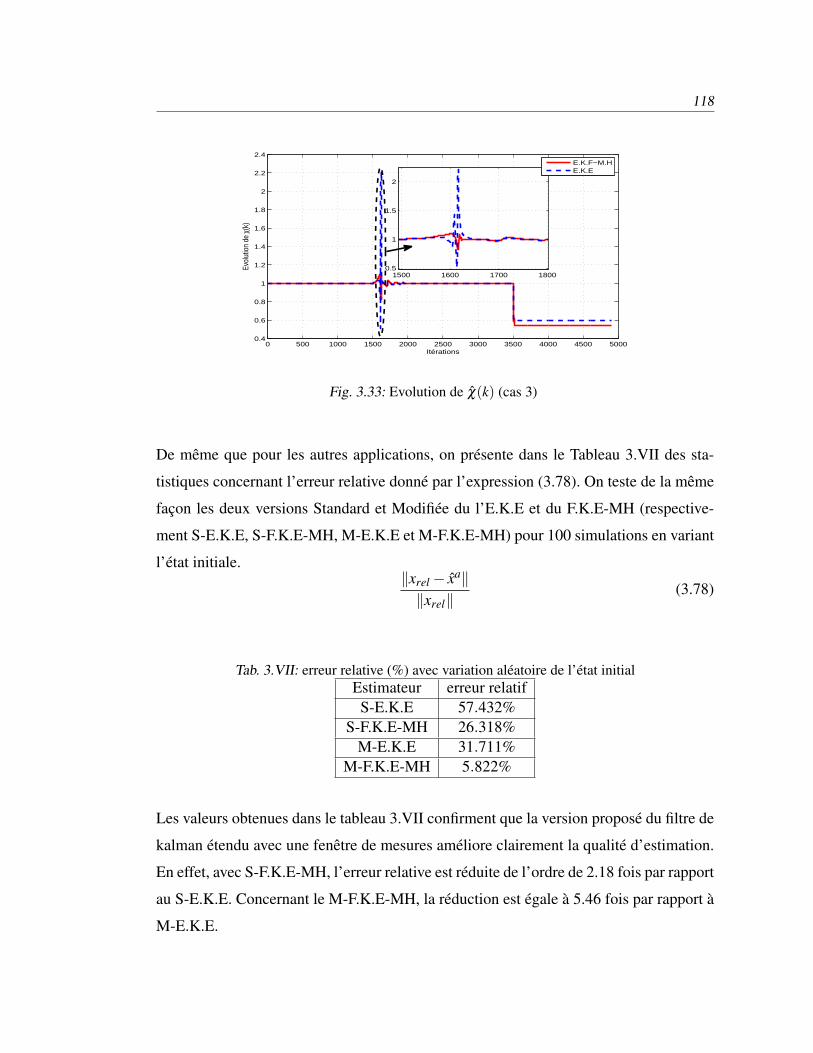
118
0 500 1000 1500 2000 2500 3000 3500 4000 4500 50000.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
2.2
2.4
Itérations
Evol
utio
n de
χ(k)
1500 1600 1700 18000.5
1
1.5
2
E.K.F−M.HE.K.E
Fig. 3.33: Evolution de χ(k) (cas 3)
De même que pour les autres applications, on présente dans le Tableau 3.VII des sta-
tistiques concernant l’erreur relative donné par l’expression (3.78). On teste de la même
façon les deux versions Standard et Modifiée du l’E.K.E et du F.K.E-MH (respective-
ment S-E.K.E, S-F.K.E-MH, M-E.K.E et M-F.K.E-MH) pour 100 simulations en variant
l’état initiale.‖xrel − xa‖
‖xrel‖(3.78)
Tab. 3.VII: erreur relative (%) avec variation aléatoire de l’état initial
Estimateur erreur relatif
S-E.K.E 57.432%
S-F.K.E-MH 26.318%
M-E.K.E 31.711%
M-F.K.E-MH 5.822%
Les valeurs obtenues dans le tableau 3.VII confirment que la version proposé du filtre de
kalman étendu avec une fenêtre de mesures améliore clairement la qualité d’estimation.
En effet, avec S-F.K.E-MH, l’erreur relative est réduite de l’ordre de 2.18 fois par rapport
au S-E.K.E. Concernant le M-F.K.E-MH, la réduction est égale à 5.46 fois par rapport à
M-E.K.E.
119
3.5 Conclusion
Dans ce chapitre nous avons proposé des nouvelles techniques, méthodes et algo-
rithmes pour :
• La modélisation, en se basant sur des techniques de transformation (ou de réduc-
tion d’index des systèmes algébro-différentiels non linéaires) pour rendre la repré-
sentation d’état d’un réseau électriques sous forme d’équations différentielles non
linéaires ordinaires et par suite le développement d’un nouveau modèle dynamique
découplé.
• L’estimation d’état, en utilisant l’estimateur de Kalman étendu comme filtre pour
estimer les états tout en introduisant des nouvelles approximations numériques
pour le calcul de la matrice Jacobienne suivie par un nouveau théorème pour la
convergence et la stabilité locale tout en minimisant le temps de calcul.
• La détection, localisation et estimation des défauts, en introduisant un schéma
FDI : un filtre de Kalman étendue qui prend en compte une fenêtre de mesures
glissantes pour assurer la tâche de détection et Estimation des défauts, et une
combinaison des observateurs à entrées inconnues pour développer un banc des
U.I.E.K.Fs assurant la localisation.
Les résultats sont validés par des simulations numériques sur des réseaux test selon le
standard IEEE, de plus ils ont montrés des bonnes performances en termes de conditions
de faisabilité, robustesse et temps de calcul.
Nous nous intéressons à l’application des différentes techniques et méthodes propo-
sées sur un réseau test 5 noeuds tout en utilisant la bibliothèque SimPowerSystems de
MAT LABr pour simuler les réseaux électriques, dont le but principale est de montrer
l’intérêt des approches développées et étudier la possibilité et la faisabilité pratique.
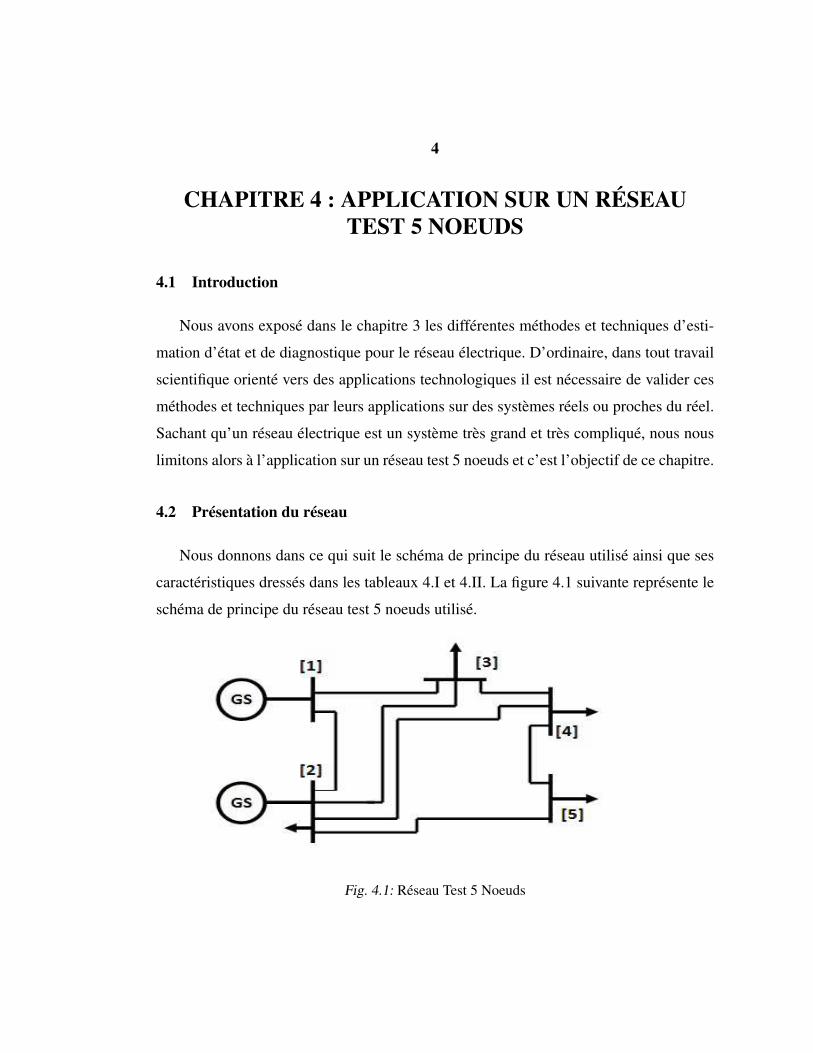
4
CHAPITRE 4 : APPLICATION SUR UN RÉSEAUTEST 5 NOEUDS
4.1 Introduction
Nous avons exposé dans le chapitre 3 les différentes méthodes et techniques d’esti-
mation d’état et de diagnostique pour le réseau électrique. D’ordinaire, dans tout travail
scientifique orienté vers des applications technologiques il est nécessaire de valider ces
méthodes et techniques par leurs applications sur des systèmes réels ou proches du réel.
Sachant qu’un réseau électrique est un système très grand et très compliqué, nous nous
limitons alors à l’application sur un réseau test 5 noeuds et c’est l’objectif de ce chapitre.
4.2 Présentation du réseau
Nous donnons dans ce qui suit le schéma de principe du réseau utilisé ainsi que ses
caractéristiques dressés dans les tableaux 4.I et 4.II. La figure 4.1 suivante représente le
schéma de principe du réseau test 5 noeuds utilisé.
Fig. 4.1: Réseau Test 5 Noeuds
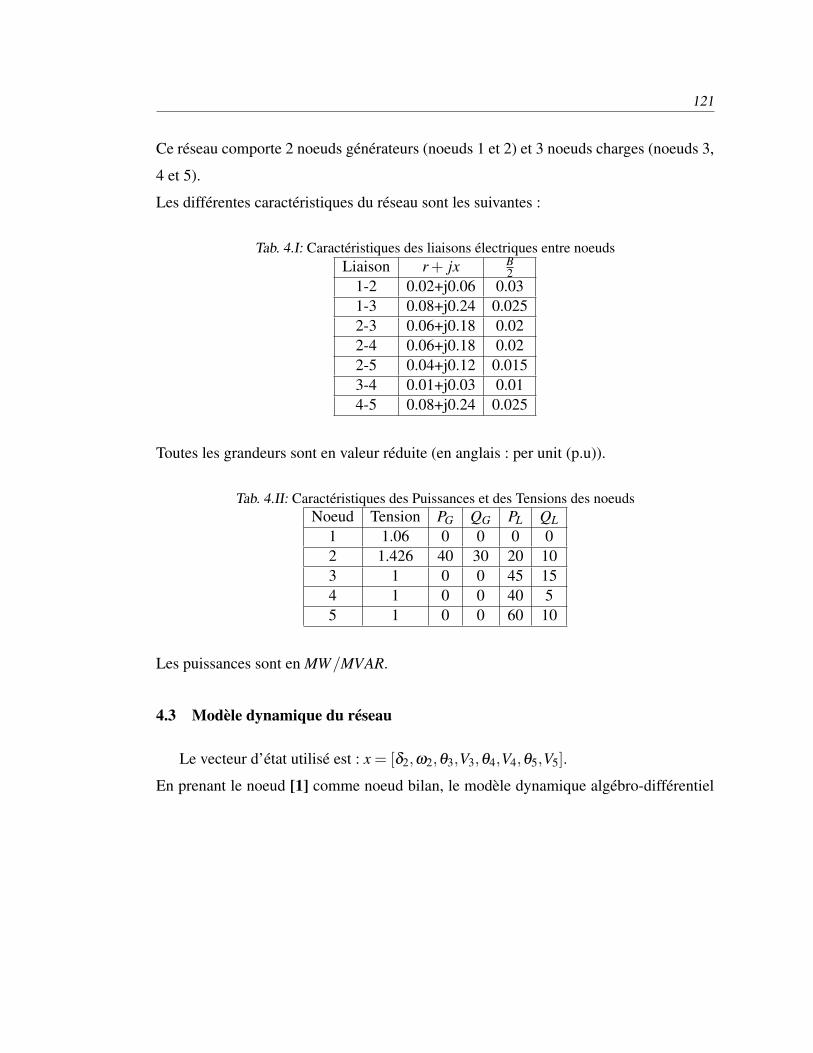
121
Ce réseau comporte 2 noeuds générateurs (noeuds 1 et 2) et 3 noeuds charges (noeuds 3,
4 et 5).
Les différentes caractéristiques du réseau sont les suivantes :
Tab. 4.I: Caractéristiques des liaisons électriques entre noeuds
Liaison r+ jx B2
1-2 0.02+j0.06 0.03
1-3 0.08+j0.24 0.025
2-3 0.06+j0.18 0.02
2-4 0.06+j0.18 0.02
2-5 0.04+j0.12 0.015
3-4 0.01+j0.03 0.01
4-5 0.08+j0.24 0.025
Toutes les grandeurs sont en valeur réduite (en anglais : per unit (p.u)).
Tab. 4.II: Caractéristiques des Puissances et des Tensions des noeuds
Noeud Tension PG QG PL QL
1 1.06 0 0 0 0
2 1.426 40 30 20 10
3 1 0 0 45 15
4 1 0 0 40 5
5 1 0 0 60 10
Les puissances sont en MW/MVAR.
4.3 Modèle dynamique du réseau
Le vecteur d’état utilisé est : x = [δ2,ω2,θ3,V3,θ4,V4,θ5,V5].
En prenant le noeud [1] comme noeud bilan, le modèle dynamique algébro-différentiel

122
du réseau sera alors :
f I : x1 = x2
f II : x2 +D2x2M2
+ PG2(x1,x3,x4,x5,x6,x7,x8)M2
= PM2M2
gI :
P3 −P3(x1,x3,x4,x5,x6) = 0
P4 −P4(x1,x3,x4,x5,x6,x7,x8) = 0
P5 −P5(x1,x5,x6,x7,x8) = 0
gII :
Q3 −Q3(x1,x3,x4,x5,x6) = 0
Q4 −Q4(x1,x3,x4,x5,x6,x7,x8) = 0
Q5 −Q5(x1,x5,x6,x7,x8) = 0
Nous mesurons la puissance de transit entre le noeud 2 et 3 (P2,3).
Les résultats de simulation du modèle dynamique ont été déjà donnés dans le chapitre1.
On ne s’intéresse dans ce qui suit alors qu’à l’estimation d’état et le diagnostic (dé-
tection, localisation et estimation des défauts) du réseau.
La bibliothèque SimPowerSystems est utilisée pour la modélisation du réseau en ques-
tion.
Les Fonctions Embedded MATLAB Function, qui sont les seules fonctions pouvant être
compilées et utilisées directement par des cartes DSP, sont utilisées pour l’implémenta-
tion des observateurs [94].
Le schéma Simulink utilisé est le suivant :
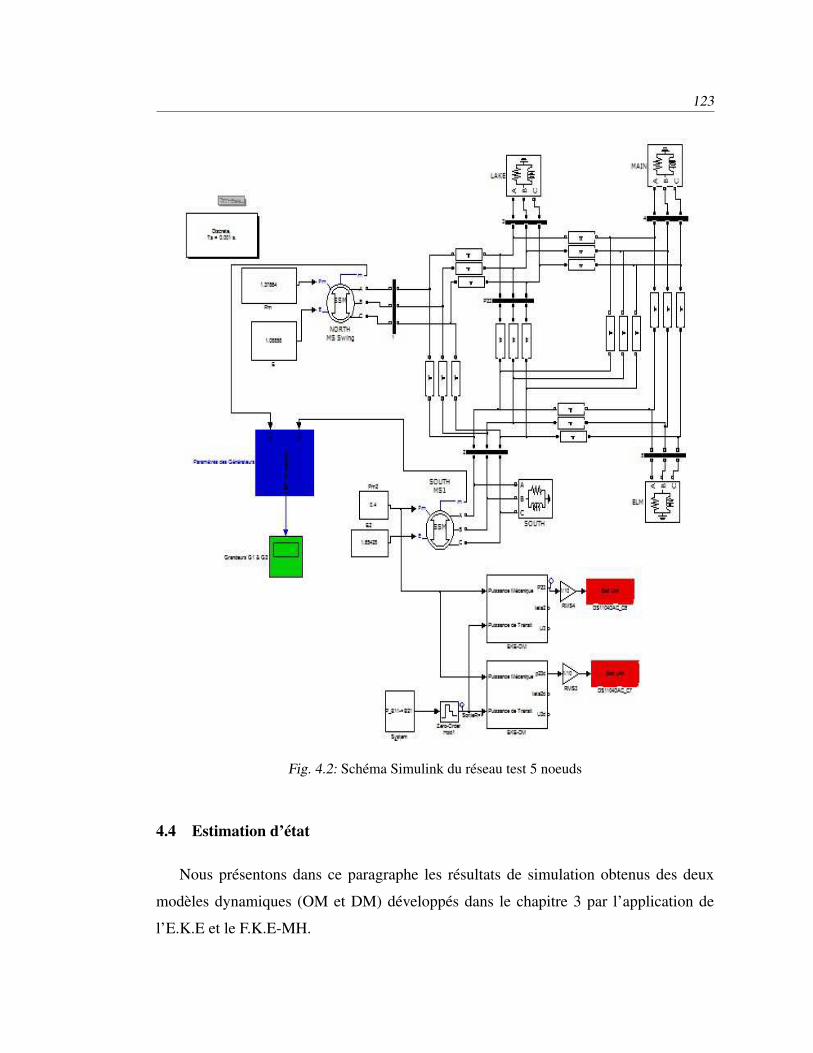
123
Fig. 4.2: Schéma Simulink du réseau test 5 noeuds
4.4 Estimation d’état
Nous présentons dans ce paragraphe les résultats de simulation obtenus des deux
modèles dynamiques (OM et DM) développés dans le chapitre 3 par l’application de
l’E.K.E et le F.K.E-MH.
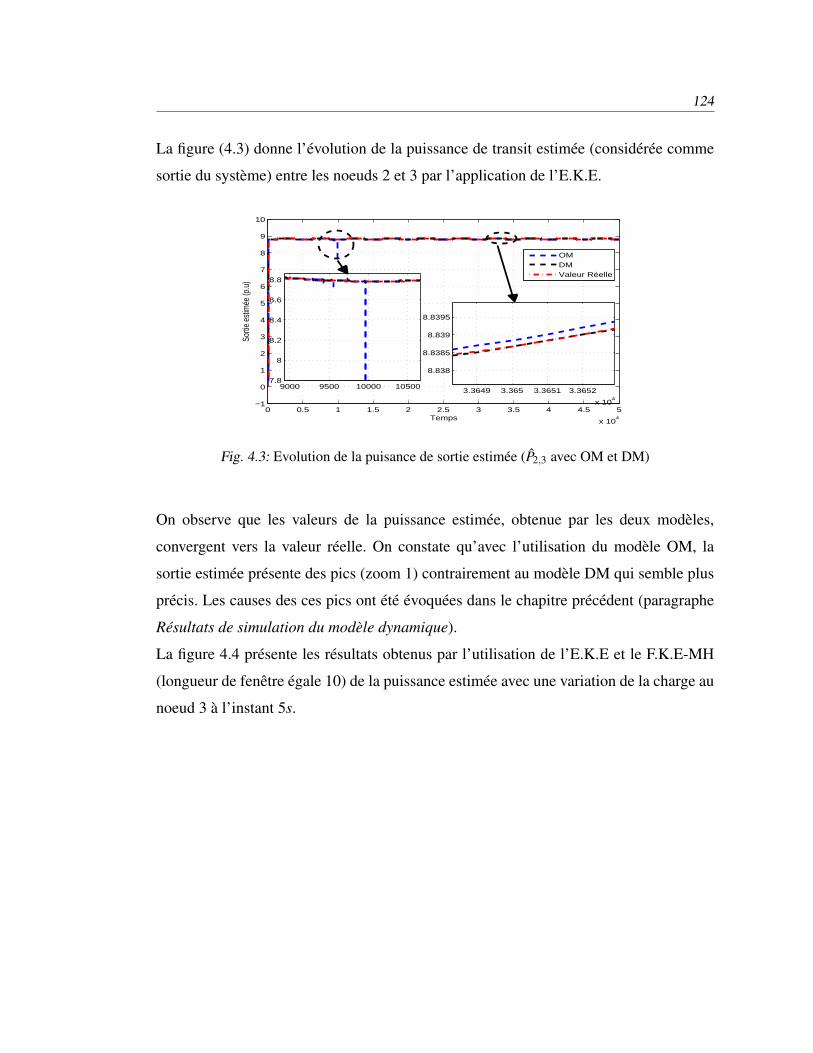
124
La figure (4.3) donne l’évolution de la puissance de transit estimée (considérée comme
sortie du système) entre les noeuds 2 et 3 par l’application de l’E.K.E.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
x 104
−1
0
1
2
3
4
5
6
7
8
9
10
Temps
Sorti
e es
timée
(p.u
)
9000 9500 10000 105007.8
8
8.2
8.4
8.6
8.8
OMDMValeur Réelle
3.3649 3.365 3.3651 3.3652
x 104
8.838
8.8385
8.839
8.8395
Fig. 4.3: Evolution de la puisance de sortie estimée (P2,3 avec OM et DM)
On observe que les valeurs de la puissance estimée, obtenue par les deux modèles,
convergent vers la valeur réelle. On constate qu’avec l’utilisation du modèle OM, la
sortie estimée présente des pics (zoom 1) contrairement au modèle DM qui semble plus
précis. Les causes des ces pics ont été évoquées dans le chapitre précédent (paragraphe
Résultats de simulation du modèle dynamique).
La figure 4.4 présente les résultats obtenus par l’utilisation de l’E.K.E et le F.K.E-MH
(longueur de fenêtre égale 10) de la puissance estimée avec une variation de la charge au
noeud 3 à l’instant 5s.
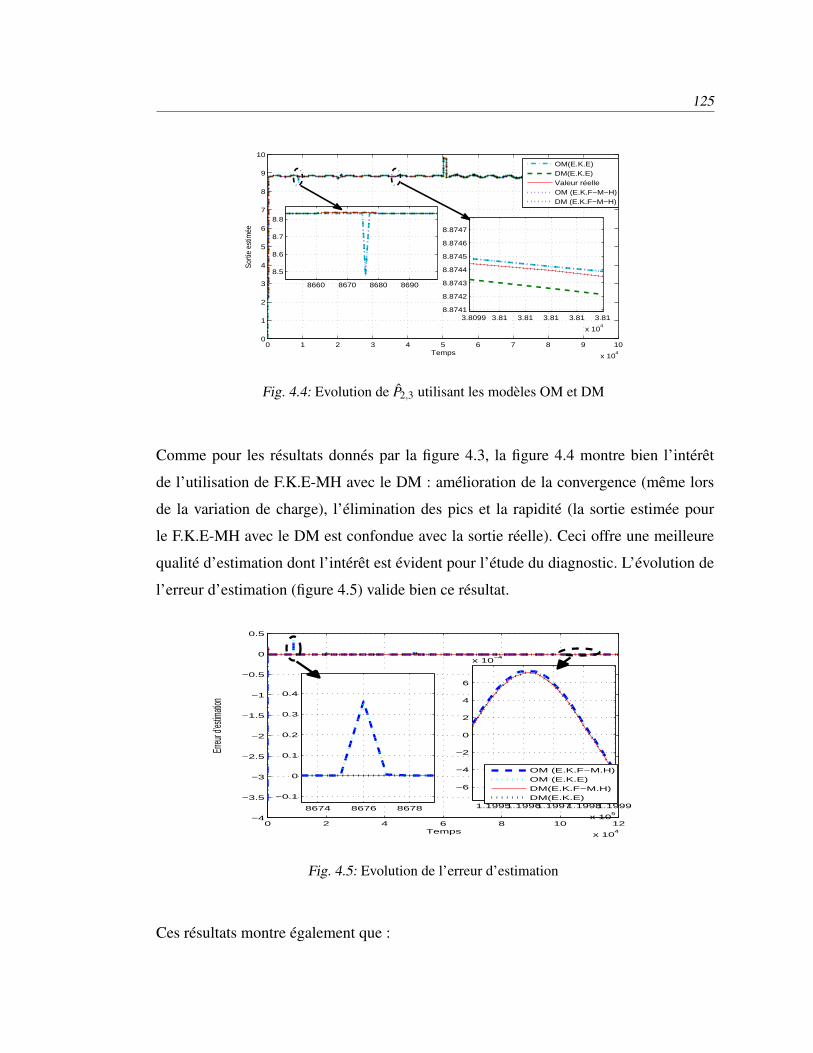
125
0 1 2 3 4 5 6 7 8 9 10
x 104
0
1
2
3
4
5
6
7
8
9
10
Temps
Sorti
e es
timée
8660 8670 8680 8690
8.5
8.6
8.7
8.8
3.8099 3.81 3.81 3.81 3.81 3.81
x 104
8.8741
8.8742
8.8743
8.8744
8.8745
8.8746
8.8747
OM(E.K.E)DM(E.K.E)Valeur réelleOM (E.K.F−M−H)DM (E.K.F−M−H)
Fig. 4.4: Evolution de P2,3 utilisant les modèles OM et DM
Comme pour les résultats donnés par la figure 4.3, la figure 4.4 montre bien l’intérêt
de l’utilisation de F.K.E-MH avec le DM : amélioration de la convergence (même lors
de la variation de charge), l’élimination des pics et la rapidité (la sortie estimée pour
le F.K.E-MH avec le DM est confondue avec la sortie réelle). Ceci offre une meilleure
qualité d’estimation dont l’intérêt est évident pour l’étude du diagnostic. L’évolution de
l’erreur d’estimation (figure 4.5) valide bien ce résultat.
0 2 4 6 8 10 12
x 104
−4
−3.5
−3
−2.5
−2
−1.5
−1
−0.5
0
0.5
Temps
Erreu
r d’es
timati
on
8674 8676 8678
−0.1
0
0.1
0.2
0.3
0.4
1.19951.19961.19971.19981.1999
x 105
−6
−4
−2
0
2
4
6
x 10−4
OM (E.K.F−M.H)OM (E.K.E)DM(E.K.F−M.H)DM(E.K.E)
Fig. 4.5: Evolution de l’erreur d’estimation
Ces résultats montre également que :
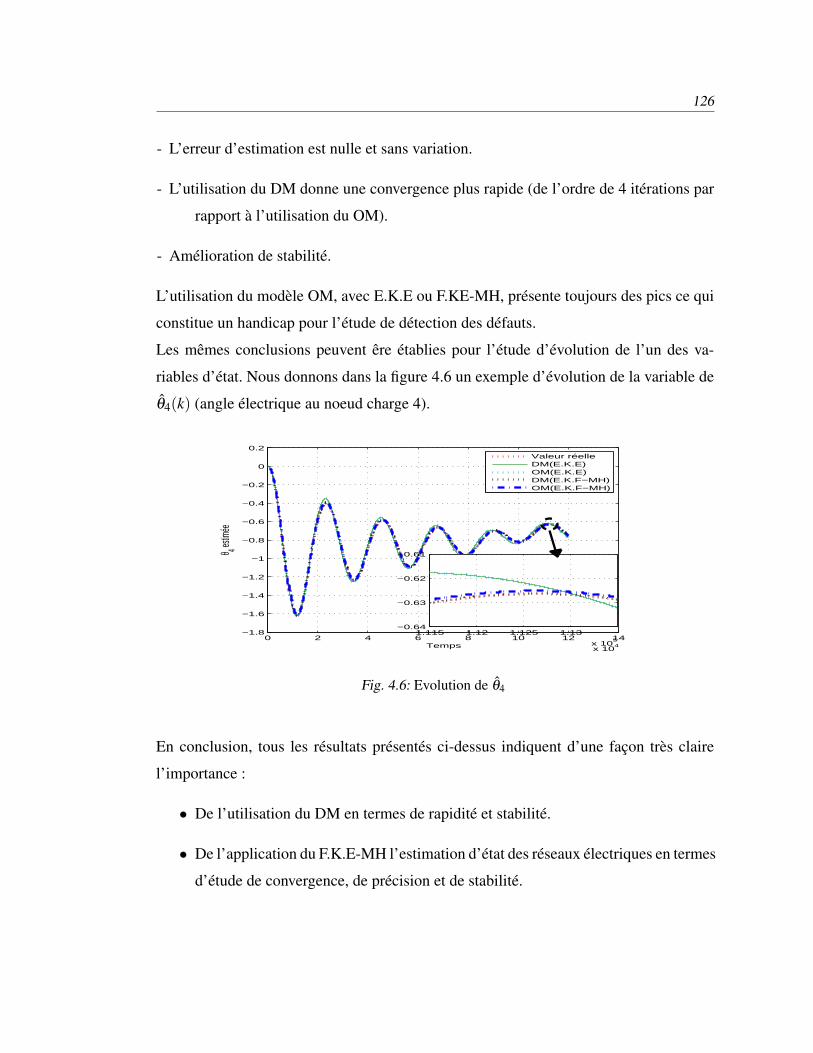
126
- L’erreur d’estimation est nulle et sans variation.
- L’utilisation du DM donne une convergence plus rapide (de l’ordre de 4 itérations par
rapport à l’utilisation du OM).
- Amélioration de stabilité.
L’utilisation du modèle OM, avec E.K.E ou F.KE-MH, présente toujours des pics ce qui
constitue un handicap pour l’étude de détection des défauts.
Les mêmes conclusions peuvent êre établies pour l’étude d’évolution de l’un des va-
riables d’état. Nous donnons dans la figure 4.6 un exemple d’évolution de la variable de
θ4(k) (angle électrique au noeud charge 4).
0 2 4 6 8 10 12 14
x 104
−1.8
−1.6
−1.4
−1.2
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
Temps
θ 4 estim
ée
Valeur réelleDM(E.K.E)OM(E.K.E)DM(E.K.F−MH)OM(E.K.F−MH)
1.115 1.12 1.125 1.13
x 105
−0.64
−0.63
−0.62
−0.61
Fig. 4.6: Evolution de θ4
En conclusion, tous les résultats présentés ci-dessus indiquent d’une façon très claire
l’importance :
• De l’utilisation du DM en termes de rapidité et stabilité.
• De l’application du F.K.E-MH l’estimation d’état des réseaux électriques en termes
d’étude de convergence, de précision et de stabilité.

127
4.5 Détection, Localisation et Estimation des défauts
4.5.1 Détection et Localisation
4.5.1.1 Détection des défauts
On procède, dans ce paragraphe, à la validation des algorithmes et du schéma FDI
donnés dans le chapitre 3.
La détection des défauts est assurée par un simple test logique des résidus. Nous consi-
dérons les deux cas Standard et Modifié pour vérifier l’analyse de convergence basée sur
le choix des matrice de covariance Rk et Qk.
Pour montrer l’apport du choix de Rk et Qk, on fait une comparaison des résidus générés
par le F.K.E, l’E.K.E et le F.K.E-MH (avec une fenêtre de 10 mesures) et on considère :
• Les versions Standard : (S-F.K.E / S-E.K.E / S-F.K.E-MH)
QE.K.Ek = QF.K.E
k = QF.K.E−MHk = 9.615∗10−5I8
RE.K.Ek = RF.K.E
k = 2.7∗10−3
RF.K.E−MHk = 2.7∗10−3 ∗ I10
• Les versions Modifiées : (M-F.K.F / M-E.K.E / M-F.K.E-MH)
QE.K.Ek = QF.K.E
k = 100eTk ekI8 +10−3I8
QF.K.E−MHk = 0.1e f T
k e fkI8 +10−3I8
RE.K.Ek = RF.K.E
k = 10∗HkPkHTk +10−3
RF.K.E−MHk = 0.01CkPkC
Tk +10−3I10
L’établissement d’un défaut (ouverture de ligne entre les noeuds 2 et 3) entre les instants
3s et 3.1s, nous a permis de suivre l’évolution des différents résidus. Les résultats obte-
nus sont donnés par la figure 4.7.
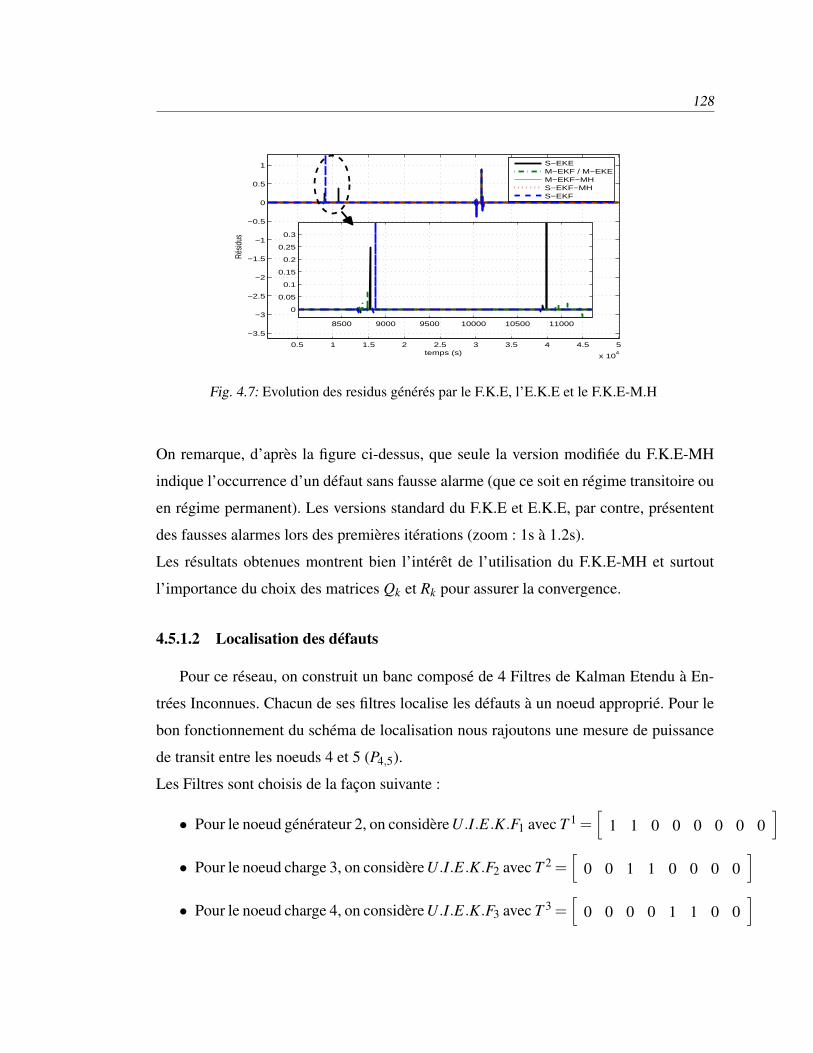
128
0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
x 104
−3.5
−3
−2.5
−2
−1.5
−1
−0.5
0
0.5
1
temps (s)
Résid
us
S−EKEM−EKF / M−EKEM−EKF−MHS−EKF−MHS−EKF
8500 9000 9500 10000 10500 11000
0
0.05
0.1
0.15
0.2
0.25
0.3
Fig. 4.7: Evolution des residus générés par le F.K.E, l’E.K.E et le F.K.E-M.H
On remarque, d’après la figure ci-dessus, que seule la version modifiée du F.K.E-MH
indique l’occurrence d’un défaut sans fausse alarme (que ce soit en régime transitoire ou
en régime permanent). Les versions standard du F.K.E et E.K.E, par contre, présentent
des fausses alarmes lors des premières itérations (zoom : 1s à 1.2s).
Les résultats obtenues montrent bien l’intérêt de l’utilisation du F.K.E-MH et surtout
l’importance du choix des matrices Qk et Rk pour assurer la convergence.
4.5.1.2 Localisation des défauts
Pour ce réseau, on construit un banc composé de 4 Filtres de Kalman Etendu à En-
trées Inconnues. Chacun de ses filtres localise les défauts à un noeud approprié. Pour le
bon fonctionnement du schéma de localisation nous rajoutons une mesure de puissance
de transit entre les noeuds 4 et 5 (P4,5).
Les Filtres sont choisis de la façon suivante :
• Pour le noeud générateur 2, on considère U.I.E.K.F1 avec T 1 =[
1 1 0 0 0 0 0 0
]
• Pour le noeud charge 3, on considère U.I.E.K.F2 avec T 2 =[
0 0 1 1 0 0 0 0
]
• Pour le noeud charge 4, on considère U.I.E.K.F3 avec T 3 =[
0 0 0 0 1 1 0 0
]
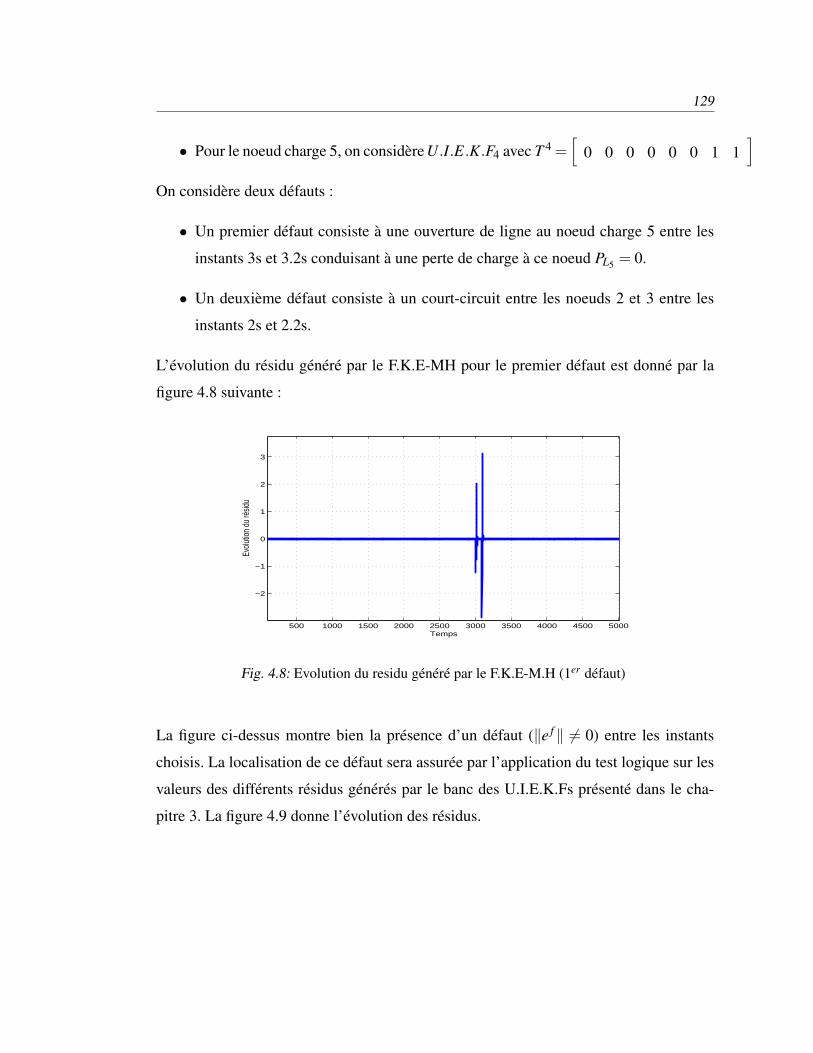
129
• Pour le noeud charge 5, on considère U.I.E.K.F4 avec T 4 =[
0 0 0 0 0 0 1 1
]
On considère deux défauts :
• Un premier défaut consiste à une ouverture de ligne au noeud charge 5 entre les
instants 3s et 3.2s conduisant à une perte de charge à ce noeud PL5= 0.
• Un deuxième défaut consiste à un court-circuit entre les noeuds 2 et 3 entre les
instants 2s et 2.2s.
L’évolution du résidu généré par le F.K.E-MH pour le premier défaut est donné par la
figure 4.8 suivante :
500 1000 1500 2000 2500 3000 3500 4000 4500 5000
−2
−1
0
1
2
3
Temps
Evol
utio
n du
résid
u
Fig. 4.8: Evolution du residu généré par le F.K.E-M.H (1er défaut)
La figure ci-dessus montre bien la présence d’un défaut (‖e f ‖ 6= 0) entre les instants
choisis. La localisation de ce défaut sera assurée par l’application du test logique sur les
valeurs des différents résidus générés par le banc des U.I.E.K.Fs présenté dans le cha-
pitre 3. La figure 4.9 donne l’évolution des résidus.
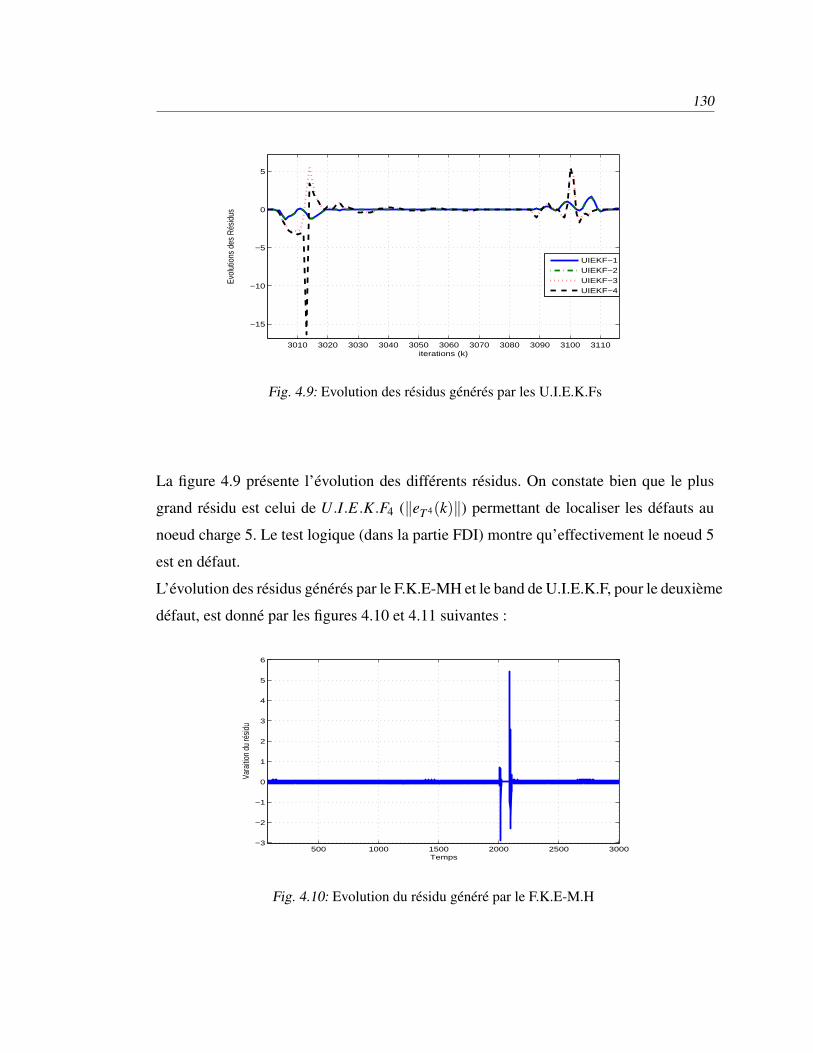
130
3010 3020 3030 3040 3050 3060 3070 3080 3090 3100 3110
−15
−10
−5
0
5
iterations (k)
Evol
utio
ns d
es R
ésid
us
UIEKF−1UIEKF−2UIEKF−3UIEKF−4
Fig. 4.9: Evolution des résidus générés par les U.I.E.K.Fs
La figure 4.9 présente l’évolution des différents résidus. On constate bien que le plus
grand résidu est celui de U.I.E.K.F4 (‖eT 4(k)‖) permettant de localiser les défauts au
noeud charge 5. Le test logique (dans la partie FDI) montre qu’effectivement le noeud 5
est en défaut.
L’évolution des résidus générés par le F.K.E-MH et le band de U.I.E.K.F, pour le deuxième
défaut, est donné par les figures 4.10 et 4.11 suivantes :
500 1000 1500 2000 2500 3000−3
−2
−1
0
1
2
3
4
5
6
Temps
Vara
ition
du ré
sidu
Fig. 4.10: Evolution du résidu généré par le F.K.E-M.H
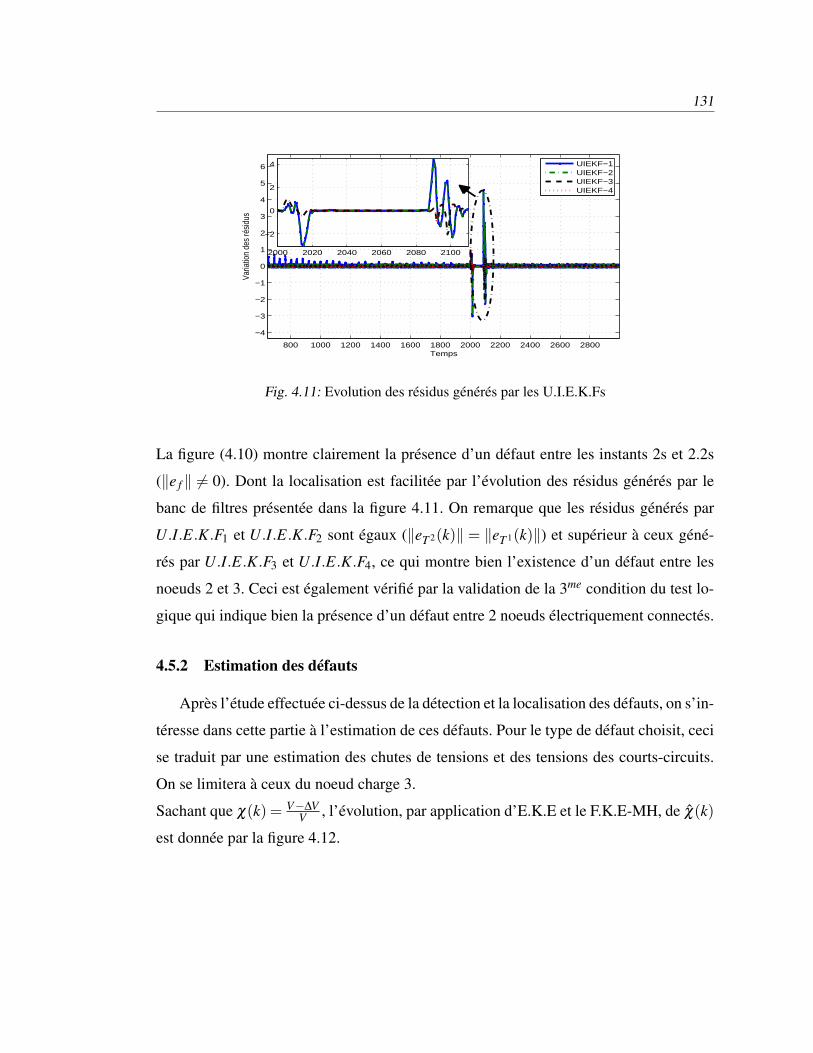
131
800 1000 1200 1400 1600 1800 2000 2200 2400 2600 2800
−4
−3
−2
−1
0
1
2
3
4
5
6
Temps
Varia
tion
des
rési
dus
2000 2020 2040 2060 2080 2100
−2
0
2
4
UIEKF−1UIEKF−2UIEKF−3UIEKF−4
Fig. 4.11: Evolution des résidus générés par les U.I.E.K.Fs
La figure (4.10) montre clairement la présence d’un défaut entre les instants 2s et 2.2s
(‖e f ‖ 6= 0). Dont la localisation est facilitée par l’évolution des résidus générés par le
banc de filtres présentée dans la figure 4.11. On remarque que les résidus générés par
U.I.E.K.F1 et U.I.E.K.F2 sont égaux (‖eT 2(k)‖ = ‖eT 1(k)‖) et supérieur à ceux géné-
rés par U.I.E.K.F3 et U.I.E.K.F4, ce qui montre bien l’existence d’un défaut entre les
noeuds 2 et 3. Ceci est également vérifié par la validation de la 3me condition du test lo-
gique qui indique bien la présence d’un défaut entre 2 noeuds électriquement connectés.
4.5.2 Estimation des défauts
Après l’étude effectuée ci-dessus de la détection et la localisation des défauts, on s’in-
téresse dans cette partie à l’estimation de ces défauts. Pour le type de défaut choisit, ceci
se traduit par une estimation des chutes de tensions et des tensions des courts-circuits.
On se limitera à ceux du noeud charge 3.
Sachant que χ(k) = V−∆VV
, l’évolution, par application d’E.K.E et le F.K.E-MH, de χ(k)
est donnée par la figure 4.12.
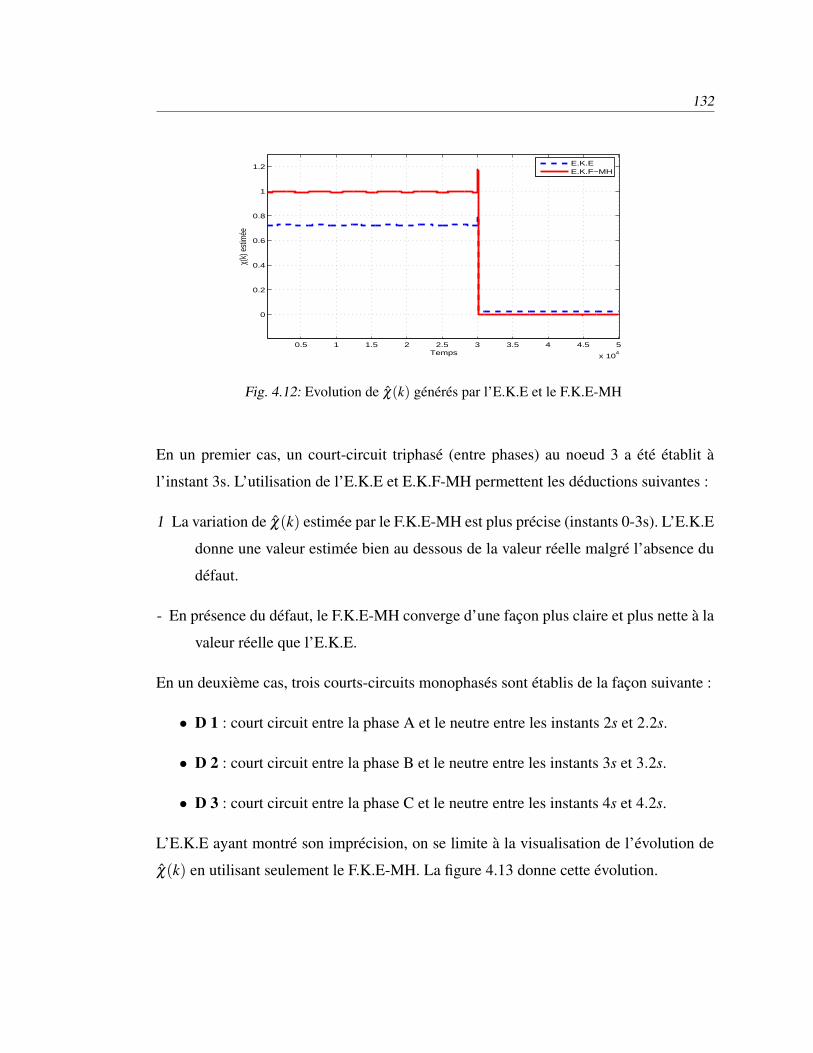
132
0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
x 104
0
0.2
0.4
0.6
0.8
1
1.2
Temps
χ(k)
est
imée
E.K.EE.K.F−MH
Fig. 4.12: Evolution de χ(k) générés par l’E.K.E et le F.K.E-MH
En un premier cas, un court-circuit triphasé (entre phases) au noeud 3 a été établit à
l’instant 3s. L’utilisation de l’E.K.E et E.K.F-MH permettent les déductions suivantes :
1 La variation de χ(k) estimée par le F.K.E-MH est plus précise (instants 0-3s). L’E.K.E
donne une valeur estimée bien au dessous de la valeur réelle malgré l’absence du
défaut.
- En présence du défaut, le F.K.E-MH converge d’une façon plus claire et plus nette à la
valeur réelle que l’E.K.E.
En un deuxième cas, trois courts-circuits monophasés sont établis de la façon suivante :
• D 1 : court circuit entre la phase A et le neutre entre les instants 2s et 2.2s.
• D 2 : court circuit entre la phase B et le neutre entre les instants 3s et 3.2s.
• D 3 : court circuit entre la phase C et le neutre entre les instants 4s et 4.2s.
L’E.K.E ayant montré son imprécision, on se limite à la visualisation de l’évolution de
χ(k) en utilisant seulement le F.K.E-MH. La figure 4.13 donne cette évolution.
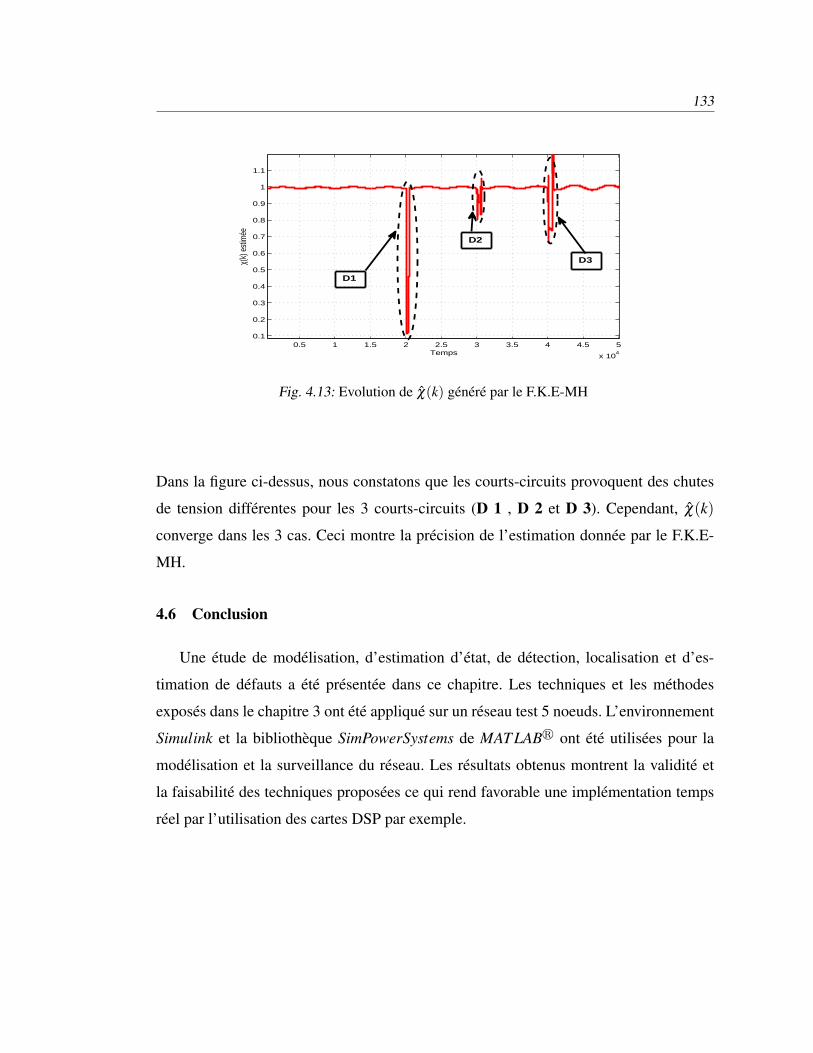
133
0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
x 104
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
1.1
Temps
χ(k)
est
imée
D1
D2
D3
Fig. 4.13: Evolution de χ(k) généré par le F.K.E-MH
Dans la figure ci-dessus, nous constatons que les courts-circuits provoquent des chutes
de tension différentes pour les 3 courts-circuits (D 1 , D 2 et D 3). Cependant, χ(k)
converge dans les 3 cas. Ceci montre la précision de l’estimation donnée par le F.K.E-
MH.
4.6 Conclusion
Une étude de modélisation, d’estimation d’état, de détection, localisation et d’es-
timation de défauts a été présentée dans ce chapitre. Les techniques et les méthodes
exposés dans le chapitre 3 ont été appliqué sur un réseau test 5 noeuds. L’environnement
Simulink et la bibliothèque SimPowerSystems de MAT LABr ont été utilisées pour la
modélisation et la surveillance du réseau. Les résultats obtenus montrent la validité et
la faisabilité des techniques proposées ce qui rend favorable une implémentation temps
réel par l’utilisation des cartes DSP par exemple.
CONCLUSION
Durant ces travaux de recherche, nous avons tout d’abord proposé une nouvelle mé-
thode de synthèse d’observateur d’état des systèmes non linéaires sous forme DAE. Ce
qui permet, dans un premier temps, d’améliorer les résultats disponibles dans la littéra-
ture sur l’estimation d’état et dans un deuxième temps de concevoir un nouveau schéma
robuste pour le diagnostic des réseaux électriques. Nous avons, en particulier, développé
des techniques spécifiques pour la modélisation dynamique des réseaux électriques en
s’inspirant des algorithmes découplés. Enfin, nous avons appliqué les résultats obtenus
pour l’estimation des principales variables du réseau électrique HT ainsi que sa Super-
vision/Diagnostic.
Afin de situer au mieux notre contribution par rapport aux travaux existants, un état
de l’art a été proposé dans le premier chapitre. Nous avons d’abord rappelé les résultats
principaux de la théorie concernant les deux aspects fondamentaux des réseaux élec-
triques Algébrique (flux de puissance / Estimation d’état) et Dynamique (les modèles
DAEs). Nous avons proposé dans ce chapitre quelques extensions d’approches propo-
sées dans la littérature pour mieux améliorer la rapidité (temps de calcul) et la stabilité
ce qui permet leurs faisabilités dans une implémentation pratique.
le chapitre 2 a été consacré à l’état de l’art (classer et étudier) des approches et des
techniques utilisées pour la synthèse des observateurs non-linéaires. Ce chapitre com-
prend aussi une étude permettant de donner des conditions suffisantes de stabilité, Ob-
servabilité et Commandabilité pour les deux cas des systèmes continus et discrets.
Nos contributions ont été proposées dans le troisième chapitre qui s’articule autour de
trois thèmes principaux. Dans le premier thème, un nouveau modèle dynamique basé sur
les techniques de dé-couplement et de transformation des systèmes DAEs en ODEs non-
linéaires. L’apport de ce modèle dynamique en termes de stabilité, convergence et temps
de calcule est prouvé par quelques applications sur des réseaux test selon le standard
135
IEEE. Le deuxième thème est consacré à l’estimation de l’état des réseaux électriques
HT décrits par des ODEs non linéaires.
Ce problème revêt une grande importance dans la pratique. En effet, dans de nom-
breux cas, la linéarisation du modèle dynamique ou la réduction de l’ordre du système
(en considérant quelques états de valeur fixe) est nécessaire pour réaliser des objectifs
d’estimation ou de diagnostic. Techniquement, le problème est résolu grâce aux transfor-
mations des DAEs en ODEs et par l’application de l’Estimateur de Kalman Etendu avec
une analyse de stabilité et de convergence locale. Une version plus évoluée et robuste du
Filtre de Kalman Etendu est décrite dans le thème qui suit.
Le problème de Diagnostic / Supervision est développé dans le troisième thème.
Il s’agit d’étudier les trois étapes de base pour former un module de diagnostic et qui
sont : la détection, la localisation et l’estimation des défauts. La première étape est vali-
dée après le développement d’un nouveau filtre de Kalman Etendu qui prend en compte
une fenêtre de mesures glissantes (E.K.F-MH) suivie par une étude de convergence lo-
cale. Le nouveau filtre montre une meilleure robustesse pour la détection des défauts. La
deuxième étape (ou la localisation) est fondée sur l’utilisation d’un banc des Filtres de
Kalman Etendu à Entrées Inconnues. Nous avons développé un schéma FDI robuste qui
combine ces derniers avec un E.K.F-MH tout en optant pour un Test logique proposé
pour assurer les tâches de détection et de localisation des défauts dans un réseau élec-
trique HT. La dernière étape est celle d’estimation des défauts. Pour ce faire, nous avons
développé un système augmenté où les nouvelles variables ajoutées au vecteur d’état
assurent la tâche d’estimation des chutes des tensions et les tensions des courts-circuits.
Les méthodes et les algorithmes développés sont basés sur le filtre de Kalman. Le F.K.E
est adapté pour des applications en temps réel à l’échelle industrielle avec le développe-
ment des cartes DSP.
Dans le dernier chapitre (chapitre 4), nous avons appliqué les méthodes et les algo-
rithmes d’estimation et de diagnostic à un réseau test 5 noeuds. Ce chapitre présente des
résultats de simulation. Dans un premier temps, on rappelle le modèle dynamique sous
forme des DAEs non-linéaires. La première application concerne l’estimation robuste de

136
l’état du système avec le modèle dynamique ordinaire et celui proposé. En exploitant ce
résultat sur l’estimation, on applique le schéma FDI en proposant une stratégie permet-
tant de détecter et estimer les défauts par le même E.K.F-MH. Les validations ont été
faites par simulation numérique du modèle physique dans l’environnement Simulink et
la bibliothèque SimPowerSystems de MAT LABr pour mieux gérer le réseau.
Ce travail ouvre la voie à d’autres développements, en particulier la recherche de
nouvelles structures d’observateurs permettant l’extension de nos résultats à des réseaux
électriques HT plus larges tout en réduisant le temps de calcul. Une autre alternative
peut être l’exploration de nouvelles stratégies de commande non-linéaire fondées sur les
modèles issus du réseau électrique dans le but de concevoir un schéma complet pour
une commande tolérante aux défauts. Enfin, une mise en oeuvre sur processus réel (avec
des cartes DSP) des différentes stratégies d’estimation et de diagnostic permettrait une
validation plus complète de nos travaux.
BIBLIOGRAPHIE
[1] M. Eremia, J. Trecat, and A. Germond. Reseau electriques : Aspects Actuels. Edi-
tura Tehnica, Bucuresti, 2nd edition, 2000.
[2] R.A. Jabr. Optimal power flow using an extended conic quadratic formulation.
IEEE Transactions on Power Systems, 23 :1000–1008, 2008.
[3] H.D. Chiang. A decoupled load flow method for distribution power networks :
algorithms, analysis and convergence study. International Journal of Electrical
Power and Energy Systems, 13 :130–138, 1991.
[4] V.V. Thong, J. Driesen, and R. Belmans. Power quality and voltage stability of dis-
tribution system with distributed energy resources. International Journal of Distri-
buted Energy Resources, 1 :227–240, 2005.
[5] C. J. Dafis. An observbility formulation for nonlinear power systems modeled as
differential algebraic systems. PhD thesis, Drexel university, PA, USA, 2005.
[6] Nesmat Abu-Tabak. Stabilité dynamique des systèmes électriques multima-
chines :modélisation, commande, observation et simulation. PhD thesis, L’école
centrale de LYON, FRANCE, 2008.
[7] Inigo Cobelo. Active control of Distribution Networks. PhD thesis, Faculty of
Engineering and Physical Sciences , University of Manchester. U.K, 2005.
[8] F.C. Schweppe and J. Wildes. Power system static state estimation. IEEE Transac-
tions on Power Apparatus and systems, 89 :130–135, 1970.
[9] R. Neela and P. Aravindhababu. A new decoupling strategy for power system state
estimation. International Journal of Electric Power Systems Research, 50 :2047–
2051, 2009.
[10] A. Monticelli and A. Garcia. Fast decoupled state estimators. IEEE Transactions
on Power Systems, 5 :556–564, 1990.
138
[11] J.J. Allemong, L. Radu, and A.M. Sasson. A fast and reliable state estimation
algorithm for aep’s new control center. IEEE Transactions on Power Apparatus
and systems, 4 :933–944, 1982.
[12] A. Thabet, M. Boutayeb, G. Didier, S. Chniba, and M.N.Abdelkrim. Power system
static state estimation and stability analysis. In 11th International conference on
Sciences and Techniques of Automatic control and computer engineering, pages
1–13, December 19-21, Monastir, TUNISIA, 2010.
[13] A. Thabet, S. Chniba, D. Gaetan, M. Boutayeb, and M.N Abdelkrim. Power sys-
tems load flow and state estimation : Modified methods and evaluation of stability
and speeds computing. International Review of Electrical Engineering, 5 :1110–
1118, 2010.
[14] M.N. Nursyarizal. Wls modification power systems state estimation embedded
with facts devices. In Proceedings of the International Conference on Electrical
Engineering and Informatics, pages 244–248, Institut Teknologi Bandung, Indone-
sia, 2007.
[15] Mahta Boozari. State estimation and Transient stability analysis in power system
using artificial neural networks. PhD thesis, Scholl of Engineering Science, SI-
MON FRASER University, CANADA, 2004.
[16] M. Roberto. Non gaussian state estimation in power systems. In International
Conference on Mathematical and Statistical Modeling, pages 1–23, Castillo, 2006.
[17] E.D. Crainic, X.D. DO, and D.F. Mukhedkar. Power system observability : guide-
lines for measurement system designer. In IFAC Symp on Power System Modelling
and Control Appl, pages 1–8, Brussels, 1998.
[18] Jiangnan Peng. Optimal pmu placement for full network observability using tabu
search algorithm. International Journal of Electrical Power and Energy Systems,
28 :223–231, 2006.
139
[19] T. Pierre and H. Nicolas. Observability and state estimation of electrical power
networks (sinusoidal signals). Computers and Electrical Engineering, 28 :391–
416, 2002.
[20] D. Karlsson and D.J. Hill. Modelling and identification of nonlinear dynamic loads
in power systems. IEEE Transactions on Power Systems, 9 :157–166, 1994.
[21] M. A. Pai, P. W. Sauer, B. C. Lesieutre, and R. Adapa. Structural stability in power
systems-effect of load models. IEEE Transactions on Power Systems, 10 :609–615,
1995.
[22] Ernst Scholtz. Observer based monitors and distributed wave controllers for elec-
tromechanical disturbances in power systems. PhD thesis, Massachusetts Institute
Technology, USA, 2004.
[23] P.M. Anderson and A.A. Fouad. Power system control and stability. In IEEE Press,
pages –, New York, 1994.
[24] P.W. Sauer and M. A. Pai. Power system dynamics and stability. In Prentice Hall,
Upper Saddle River, pages –, New Jersey, 1998.
[25] C. O. Nwankpa and R. M. Hassan. A stochastic based voltage collapse indicator.
IEEE Transactions on Power Systems, 8 :1187–1194, 1993.
[26] Jr William D. Stevenson. 5 bus sample system. 2008.
[27] C. Madtharad, S. Premrudeepreechacharn, and N.R. Watson. Power system state
estimation using singular value decomposition. International Journal of Electric
Power Systems Research, 67 :99–107, 2003.
[28] A. Pandian, K. Parthasarathy, D. Thukaram, and S.A. Soman. A numerically stable
decomposition based power system state estimation algorithm. International Jour-
nal of Electrical Power and Energy Systems, 20 :17–23, 1998.
[29] P.A. Lof, G. Anderson, and D.J. Hill. Voltage stability indices for stressed power
systems. IEEE Transactions on Power Systems, 8 :326–335, 1993.
140
[30] Gildas Besançon. Nonlinear Observers and Application. Springer, Berlin Heidel-
berg New York, 0170-8643 edition, 2007.
[31] R. Herman and J. Krener. Nonlinear controlability and observability. IEEE Tran-
sactions on Automatic Control, 22 :728–740, 1977.
[32] E.D Sontag. A concept of local observability. Systems and Control Letters, 5 :41–
47, 1984.
[33] J. Marquez. Nonlinear control systems analysis and design. JOHN WILEY and
SONS, INC., Hoboken, New Jersey, – edition, 2003.
[34] J. K. Hedrick and A. Girard. Control of nonlinear dynamic systems : Theory and
applications. 2008.
[35] H. Nijmeijer. Observability of autonomous discret-time nonlinear systems : a geo-
metric approach. International Journal Control, 36 :862–874, 1982.
[36] Ali Zemouch. Sur l’observation de l’état des systèmes dynamiques non linéaires.
PhD thesis, Université Louis Pasteur, Strasbourg I, France, 2007.
[37] B. Boulkroune. Estimation de l’état des systèmes non linéaires à temps discret. Ap-
plication à une station d’épuration. PhD thesis, Université Henri Poincaré Nancy
1, France, 2008.
[38] Y. Song and J.W. Grizzle. The extended kalman filter as a local asymptotic observer
for nonlinear discrete-time systems. Journal of Mathematical Systems, Estimation
and Control, 5 :59–78, 1995.
[39] M. Boutayeb. Identification of nonlinear systems in the presence of unknown but
bounded disturbances. IEEE Transactions on Automatic Control, 45 :1503–1507,
2000.
[40] A. Krener and A. Isidori. Linearization by output injection and nonlinear observers.
Systems and Control Letters, 3 :47–52, 1983.
141
[41] A. Krener and W. Respondek. Nonlinear observer with linearizable error dynamics.
SIAM on Control and Optimization, 23 :197–216, 1985.
[42] J. P. Gauthier, H. Hammouri, and S. Othman. A simple observer for nonlinear
systems - application to bioreactors. IEEE Transactions on Automatic Control,
37 :875–880, 1992.
[43] M. Arcak and P. Kokotovic. Non linear observers : A circle criterion design and
robustness analysis. Automatica, 12 :1923–1930, 2001.
[44] J. Jouroy and J.J. Slotine. Methodological remarks on contraction theory. In
Cong. on Desing and Control, pages 2537–2543, Atlantis, Paradise Island, Ba-
hamas, 2004.
[45] M. Benallouch, E. Laroche, M. Boutayeb, and J.J. Slotine. Methodological remarks
on contraction theory. In Eurpean Control Conference, pages –, Kos, Greece, 2007.
[46] R. E. Kalman. A new approach to linear filtering and prediction problems. Trans.
ASME, J. Basic Engineering, 82 :34–45, 1960.
[47] F.E. Thau. Observing the state of nonlinear dynamic systems. International Journal
Control, 17 :471–479, 1973.
[48] R.V. Patel and M. Toda. Quantitative measures of robustness in multivariable sys-
tems. In Proc. American Control Conference, pages –, San.Francisco, USA, 1980.
[49] S.R. Kou, D.L. Elliott, and T.J. Tarn. Exponential observers for nonlinear dynamic
systems. Information and Control, 29 :204–216, 1975.
[50] R. Rajamani. Observer for lipschitz nonlinear systems. IEEE Transactions on
Automatic Control, 43 :397–401, 1998.
[51] D. Bestle and M. Zeitz. Canonical form observer design for nonlinear time-variable
systems. International Journal Control, 38 :419–431, 1983.
142
[52] M. Nadri. Observation et commande des systèmes non-linéaires et application aux
bioprocédés. PhD thesis, Université Claude Bernard Lyon 1, France, 2001.
[53] M. Farza, M. MSaad, and L. Rossignol. Observer design for a class of mimo
nonlinear systems. Automatica, 40 :135–143, 2004.
[54] F. Zhu and Z. Han. A note on observers for lipschitz non linear systems. IEEE
Transactions on Automatic Control, 47 :1751–1754, 2002.
[55] G. Besançon, Q. Zhang, and H. Hammouri. High-gain observer based state and
parameter estimation in nonlinear systems. pages –, Stuttgart,Germany, 2004.
[56] M. Boutayeb and M. Darouach. Observers design for non linear descriptor systems.
In Cong. on Desing and Control, pages 2369–2374, New Orleans, LA, USA, 1995.
[57] S. Kaprielian and J. Turi. An observer for a nonlinear descriptor system. In Cong.
on Desing and Control, pages 975–976, Tucson, Arizona, 1992.
[58] G.I. Bara, A. Zemouche, and M. Boutayeb. Observer synthesis for lipschitz
discrete-time systems. In IEEE International Symposium on Circuits and Systems,
pages –, Kobe,Japan, 2005.
[59] B.W. Gordon. Dynamic sliding manifolds for realization of high index differential-
algebraic systems. Asian Journal of Control, 5 :454–466, 2003.
[60] T. Wichmann. Simplification of nonlinear dae systems with inex tacking. In Euro-
pean Conference on Circuit Theory and Design, pages 173–176, Espoo, Finland,
2001.
[61] D.C. Tarraf and H.H. Asada. On the nature and stability of differential-algebraic
systems. In Proc. American Control Conference, pages 3546–3551, Anchorage, Al
USA, 2002.
[62] V.M. Becerra, P.D. Roberts, and G.W. Griffiths. Applying the extended kalman
filter to systems described by nonlinear differential-algebraic equations. Control
Engineering Practice, 9 :267–281, 2001.
143
[63] L.Z Guo and Q.M Zhu. A fast convergent extended kalman observer for non linear
discrete-time systems. Int. J. Sys. Sci., 33 :1051–1058, 2002.
[64] M. Boutayeb and C. Aubry. A strong tracking extended kalman observer for non-
linear discrete-time systems. IEEE Transactions on Automatic Control, 44 :1550–
1556, 1999.
[65] R. Iserman. Process fault detection based on modeling and estimation methods- a
survey. Autmatica, 20 :387–404, 1984.
[66] R. Iserman. Supervision, fault detection and fault diagnosis methods : an introduc-
tion. Control Engineering Practice, 5 :639–652, 1997.
[67] R. Iserman. On the applicability of model based fault detection for technical pro-
cesses. In IFAC, pages 195–200, Sydney, Australie, 1993.
[68] A. Thabet, R. Hamdaoui, and M. N. Abdelkrim. Fault tolerant control : Application
of gimc structure to a pll identifier module. Int. J. Simulation and Multidisciplinary
Design Optimization, 3 :406–410, 2009.
[69] Alexey Shumsky. Robust analytical redundancy relations for fault diagnosis in
nonlinear systems. Asian Journal of Control, 4 :159–170, 2002.
[70] D.F.Leite, M.B.Hell, and P.Costa Jr.and F. Gomide. Real-time fault diagnosis of
nonlinear systems. Int. Multidisciplinary J. on Nonlinear Analysis, 71 :2665–2673,
2009.
[71] X. Zhang, T. Parisini, and M.M. Polycarpou. Sensor bias fault isolation in a class of
nonlinear systems. IEEE Transactions on Automatic Control, 50 :370–376, 2005.
[72] J. Stoustrup and H. Niemann. Fault detection for nonlinear systems - a standard
problem approach. In Cong. on Desing and Control, pages 96–101, Tampa, Florida,
USA, 1998.
144
[73] Wen Chen. Robust fault diagnosis and compensation in nonlinear systems via
sliding mode and iterative learning observers. PhD thesis, Scholl of Engineering
Science, SIMON FRASER University, CANADA, 2004.
[74] Cédric Join. Diagnostic des systèmes non linéaires : Contribution aux méthodes de
découplage. PhD thesis, Université Henri Poincaré, Nancy, FRANCE, 2004.
[75] V. Venkat, R. Raghunathan, Y. Kewen, and N.K. Surya. A review of process fault
detection and diagnosis. part i : Quantitative model-based methods. Computers and
Chemical Engineering, 27 :293–311, 2003.
[76] P.M Frank. Advances in observer-based fault detection. International Journal
Control, 59 :955–981, 1994.
[77] B. Jiang, M. Staroswiecki, and C. Cocquempot. Robust observer based fault diag-
nosis for a class of nonlinear systems with uncertainty. In Cong. on Desing and
Control, pages 161–166, Orlando, Florida, USA, 2001.
[78] P.M Frank. Analytical and qualitative model-based fault daignosis- a survey and
some new result. European Journal of Control, 2 :6–28, 1996.
[79] J. Chen and R.J. Patton. Robust model-based fault diagnosis for dynamic systems.
Kulwer Academic Publishers, –, – edition, 1999.
[80] V. Fathabadi, M. Shahbazian, K. Salahshour, and L. Jargani. Comparison of adap-
tive kalman filter methods in state estimation of a nonlinear system using asyn-
chronous measurements. In Proceedings of the World Congress on Engineering
and Computer Science, pages 1–8, October 20-22, San Francisco, USA, 2009.
[81] A. Thabet, M. Boutayeb, G. Didier, S. Chniba, and M.N.Abdelkrim. Fault
diagnosis for dynamic power systems. In 8th International Multi-Conference
on Syst.,Signals and Devices, Conference on Systems, Analysis and Automatic
Control, pages 1–7, Mach 22-25,Sousse, TUNISIA, 2011.
145
[82] A. Thabet, M. Boutayeb, G. Didier, S. Chniba, and M.N. Abdelkrim. Fault de-
tection and isolation for nonlinear dynamic power system. Int. Rev. of Automaic
Control, 4 :610–619, 2011.
[83] P. K. Kitandis. Unbaised minimum variance linear state estimation. Autmatica,
23 :775–778, 1987.
[84] M. Darouach, M. Zasadzinski, A.B Onana, and S. Nowakowski. Kalman filtering
with unknown inputs via optimal state estimation of singular systems. Int. J. Sys.
Sci., 26 :2015–2028, 1995.
[85] J.Y Keller, M. Darouach, and L. Caramelle. Kalman filte with unknown inputs and
robust two-stage filter. Int. J. Sys. Sci., 29 :41–47, 1998.
[86] L. Lingali, Z. Donghua, W. Youqing, and S. Dehui. Unknow input extended kalman
filter and applications in nonlinear fault diagnosis. Chinese Journal Chem. Eng.,
13 :783–790, 2005.
[87] Jiang Bin, Shi Peng, and Mao Zehui. Sliding mode observer-based fault estimation
for nonlinear networked control systems. Circuits, systems, and signal processing,
30 :1–16, 2011.
[88] Y. Wang, C.W. Chan, K.C. Cheung, and W.C. Chan. Fault estimation for a class of
nonlinear dynamical systems. In Cong. on Desing and Control, pages 3128–3129,
Phoenix, Arizona USA, 1999.
[89] Ke Zhang, Bin Jiang, and Vincent Cocquempot. Fast adaptive fault estimation
and accommodation for nonlinear time-varying delay systems. Asian Journal of
Control, 11 :643–652, 2009.
[90] G. Valverde and V. Terzija. Unscented kalman filter for power system dynamic
state estimation. IET Gener. Transm. Distrib., 5 :29–37, 2011.
146
[91] H. K. Kwang, J. G. Lee, and C. G. Park. Adaptive two-stage ekf for ins-gps loosely
coupled system with unknown fault bias. J. of Global Positioning Syst., 5 :62–69,
2006.
[92] Chien Shu Hsieh. On the optimality of two-stage kalman filtering for systems with
unknown inputs. Asian Journal of Control, 12 :510–523, 2010.
[93] A. Thabet, M. Boutayeb, G. Didier, S. Chniba, and M.N.Abdelkrim. Applying
extended kalman filter with moving horizon to fault estimation in power system.
In 12th International conference on Sciences and Techniques of Automatic control
and computer engineering, pages 608–623, December 18-20, Sousse, TUNISIA,
2011.
[94] A. Thabet, M. Boutayeb, and M.N. Abdelkrim. Real time dynamic state estimation
for power system. Int. J. of Computer Applicatons, 38 :11–18, 2012.
ANNEXE
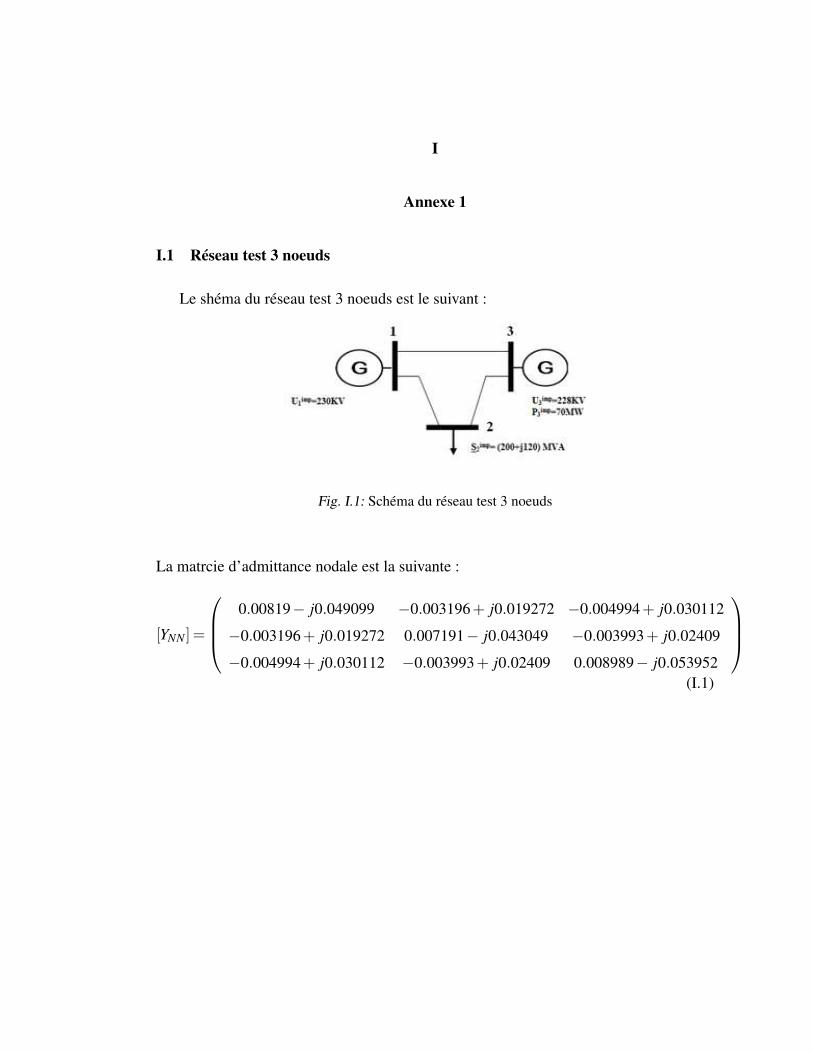
I
Annexe 1
I.1 Réseau test 3 noeuds
Le shéma du réseau test 3 noeuds est le suivant :
Fig. I.1: Schéma du réseau test 3 noeuds
La matrcie d’admittance nodale est la suivante :
[YNN ] =
0.00819− j0.049099 −0.003196+ j0.019272 −0.004994+ j0.030112
−0.003196+ j0.019272 0.007191− j0.043049 −0.003993+ j0.02409
−0.004994+ j0.030112 −0.003993+ j0.02409 0.008989− j0.053952
(I.1)

xix
I.2 Réseau test 13 noeuds
Le schèma du réseau est le suivant :
Fig. I.2: Schéma du réseau test 13 noeuds
-Le tableau des puissances est donné par :
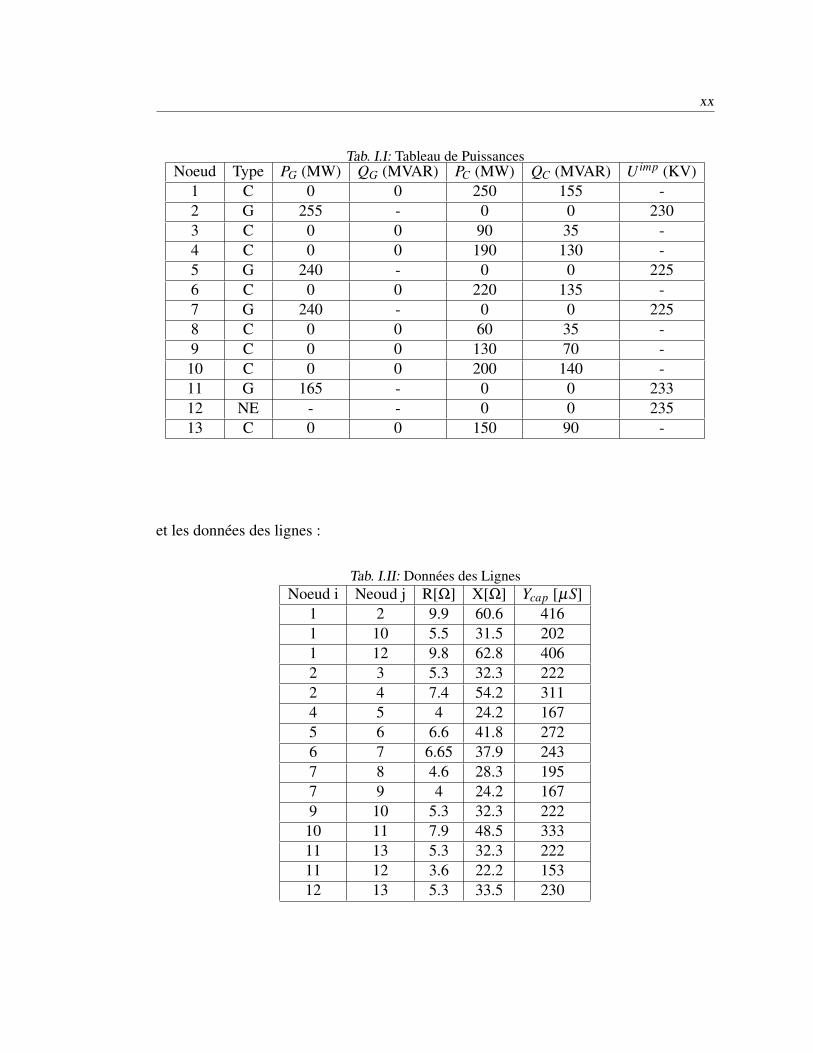
xx
Tab. I.I: Tableau de PuissancesNoeud Type PG (MW) QG (MVAR) PC (MW) QC (MVAR) U imp (KV)
1 C 0 0 250 155 -
2 G 255 - 0 0 230
3 C 0 0 90 35 -
4 C 0 0 190 130 -
5 G 240 - 0 0 225
6 C 0 0 220 135 -
7 G 240 - 0 0 225
8 C 0 0 60 35 -
9 C 0 0 130 70 -
10 C 0 0 200 140 -
11 G 165 - 0 0 233
12 NE - - 0 0 235
13 C 0 0 150 90 -
et les données des lignes :
Tab. I.II: Données des Lignes
Noeud i Neoud j R[Ω] X[Ω] Ycap [µS]
1 2 9.9 60.6 416
1 10 5.5 31.5 202
1 12 9.8 62.8 406
2 3 5.3 32.3 222
2 4 7.4 54.2 311
4 5 4 24.2 167
5 6 6.6 41.8 272
6 7 6.65 37.9 243
7 8 4.6 28.3 195
7 9 4 24.2 167
9 10 5.3 32.3 222
10 11 7.9 48.5 333
11 13 5.3 32.3 222
11 12 3.6 22.2 153
12 13 5.3 33.5 230
RÉSUMÉ
Ce travail traite l’estimation de l’état et la surveillance des systèmes non linéaires
de grandes dimensions avec une application sur des réseaux électriques. La modé-
lisation dynamique est effectuée en utilisant la propriété d’index 1 et les techniques
de découplement. Des nouvelles méthodes d’estimation d’état , basées sur le Filtre
de Kalman Etendu en incluant une fenêtre de mesures glissante, sont proposées
pour améliorer la robustesse et la précision. Une nouvelle étude de convergence
au sens de Lyapunov et de conditionnement de la matrice d’observabilité est pro-
posée pour assurer la convergence des observateurs. Une combinaison de Filtre de
kalman Etendu avec fenêtre de mesures glissantes et la version à entrées inconnues
est considérée pour assurer la tâche de surveillance. L’apport en performances des
approches développées est évalué par des simulations numériques sur des réseaux
électriques test selon le standard IEEE.
Mots clés: Systèmes non linéaires, Réseaux électriques, Techniques de Décou-
plement, Diagnostic, Filtre de Kalman, Convergence.
Abstract
This work deals with the state estimation and diagnosis of nonlinear systems with
application to power systems. Dynamic modeling is performed using an index 1
property and decoupling techniques. New methods of state estimation, based on
Extended Kalman Filter including a sliding window of measurements, are propo-
sed to improve the robustness and accuracy. A new convergence study based on
Lyapunov function and conditioning of the observability matrix is proposed to en-
sure the convergence of the observers. A combination of extended Kalman filter
with moving horizon and the version with unknown input is considered to ensure
the monitoring task. Performances of the proposed approaches were evaluated by
numerical simulations of IEEE power system test.
Key words: Non linear systems, Power system, Decoupling techniques, Diag-
nosis, Kalman Filter, Convergence.





























