Embed Size (px)
Citation preview
Originalscientificpaper
Croat. j. for. eng. 36(2015)2 147
Estimating the Position of the Harvester Head – a Key Step towards the Precision
Forestry of the Future?
Ola Lindroos, Ola Ringdahl, Pedro La Hera, Peter Hohnloser, Thomas Hellström
Abstract
Modern harvesters are technologically sophisticated, with many useful features such as the ability to automatically measure stem diameters and lengths. This information is processed in real time to support value optimization when cutting stems into logs. It can also be transferred from the harvesters to centralized systems and used for wood supply management. Such in-formation management systems have been available since the 1990s in Sweden and Finland, and are constantly being upgraded. However, data on the position of the harvester head relative to the machine are generally not recorded during harvesting. The routine acquisition and analysis of such data could offer several opportunities to improve forestry operations and re-lated processes in the future. Here, we analyze the possible benefits of having this information, as well as the steps required to collect and process it. The benefits and drawbacks of different sensing technologies are discussed in terms of potential applications, accuracy and cost. We also present the results of preliminary testing using two of the proposed methods.Our analysis indicates that an improved scope for mapping and controlling machine movement is the main benefit that is directly related to the conduct of forestry operations. In addition, there are important indirect benefits relating to ecological mapping. Our analysis suggests that both of these benefits can be realized by measuring the angles of crane joints or the loca-tions of crane segments and using the resulting information to compute the head's position. In keeping with our findings, two companies have recently introduced sensor equipped crane solutions.
Keywords: boom tip control, automation, ALS, sensors, harvester data
1. IntroductionForest machines used for fully mechanized cut-to-
length (CTL) harvesting are technically advanced with theabilitytoperformcomplexoperationssuchasau-tomatic mechanical measurement of stem diameters and lengths during harvesting. These measurements areprocessedinrealtimetosupportvalueoptimiza-tionwhencuttingstemsintologs.Theycanalsobetransferred from the machines and used in central sys-temsforwoodsupplymanagementbytheforestin-dustry (e.g. Eriksson and Lindroos 2014). Information management systems of this kind have been used in Sweden and Finland since the 1990s, and have been refinedovertime(Anon.2010).Whereasspatialdatawere initially only gathered at the stand level, it is in-
creasingly common for this information to be disag-gregated within stands.
The main factor driving this increase in resolution is the now common use of the global navigation satel-litesystem(GNSS)todeterminemachinepositions.Thispositionalinformationisusedtolinkdataforhar-vestedtreestothemachine'spositionwhenthetreewas harvested (e.g. Bollandsås et al. 2011). However, thepositionalaccuracyofcurrentsystemsislimitedbytwokeyproblems.First,GNSSdatatypicallyhavearelativelylowpositionalaccuracyof±10metersinforestenvironments(Andersen2009,Rodrigues-Pérezet al. 2007, Naesset and Jonmeister 2002). Second, the actualpositionoftheharvesterheadrelativetothemachine'spositionisgenerallynotknownbeyondthe

O. Lindroos et al. Estimating the Position of the Harvester Head – a Key Step towards the Precision Forestry ... (147–164)
148 Croat. j. for. eng. 36(2015)2
fact that it must be somewhere within the crane’s reach,whichistypicallyaround10m.ThisintroducesanaccuracyerrorcomparableinmagnitudetothatinherenttotheGNSSdata.Despitetheselimitations,currentpositioningsystemshavefoundsomepracticalapplications(e.g.Mölleretal.2012).Thepotentialofusingmeasurementsofthespatial
positionoftheharvesterheadasalowcostmethodforforestmappingwasoutlinedlongago(StendahlandDahlin 2002). It might well be that increased accuracy willunlockmanyintriguingpossibilitiesforfutureforestry and related areas. However, there has been littleprogresstowardsthisobjective,andthefullpo-tentialofexistingdatagatheringmethodshasnotyetbeenembracedduetothelowaccuracyoftheposi-tionaldata.Whilemethodsforgatheringmoreaccu-ratepositionaldatacouldcertainlybedeveloped,ithasnotyetbeendemonstratedthatthebenefitsofdo-ingsowouldjustifythecosts.Ideally,thepotentialbenefitsofsuchundertakingsshouldbeanalyzedbefore allocating scarcedevelopment resources(cf. Lindroos 2012, Berg et al. 2014).Today’stechnologymakesitpossibletogatherdata
atvariouslevelsofaccuracyandcost.Sincedifferentapplicationsarelikelytohavedifferentaccuracyre-quirements,itisimportanttomatchthelevelofac-curacytothedesiredobjectives.Inthisarticle,wein-vestigate the possible benefits of gathering highlyaccuratespatialdataonthepositionoftheharvesterhead,andcomparethesebenefitstotheeffortrequiredtogatherandprocesssuchdata.Thisinformationisusefulforunderstandingthebenefitsanddrawbacksofdifferentsensingtechnologiesintermsoftheirap-plications,accuracyandcosts.Tothisend,westartbyanalyzingthepossibleben-
efitsofknowingtheharvesterhead'sposition,andthepossiblemethodsofacquiringsuchinformation.Wethencompare the featuresand limitationsof thesemethods to the accuracy required to achieve each ben-efit.This leadstoanevaluationofthebenefitsandmethodsbywhichtheycouldberealized.Tosupportourfindings,wesummarizeresultsfromfeasibilitytestsontwooftheproposedmethodsandthencon-clude with a discussion section.
2. The benefits of knowing the position of the harvester head
Knowing the location of the harvester head confers anumberofbenefitsthatcanbedividedintotwocat-egories.Indirectbenefitsarethosethatrelatetomap-pingoftheforestenvironment.Thesebenefitsarereal-
izedbyusingthepositionoftheharvesterheadtoestimatethepositionsofotherobjects.Directbenefitsrelatetomappingandcontrollingthemovementofthemachine;insuchcases,informationonthepositionofthe harvester head is used to guide the harvesting work.Herewelistanddiscussbenefitsofbothkinds.Whilethelistisquiteextensive,thepotentialbenefitsarenumerousandsowesuspectthatreadersmaybeable to identify some that we have overlooked.
2.1 Defining accuracyForeachbenefit,weprovideanestimateofitsac-
curacyrequirements.Naturally,excessivelyaccuratepositionalinformationisnotaproblem,whereasin-sufficientaccuracymaymakecertainbenefitsimpos-sibletoachieve.Thus,mostapplicationsbenefitfromhavingthehighestpossibleaccuracy.However, in-creasedaccuracynormallyimpliesincreasedcosts,soforeachbenefitweaimtoidentifytheminimumlevelof accuracy needed to achieve the relevant functional-ity.Forexample,insomeapplications,itiscrucialtoknowwhichstandatreeoriginatesfrom.Accuracyatthemmlevelwouldprovidesuchinformation,butwouldbeexcessive;theobjectivecouldbeachievedequally well with an accuracy of 10 to 20 meters. Therefore, we have tried to estimate a reasonable min-imumlevelofaccuracyforeachapplication,whilenoting that the actual accuracy required in a given situationmaybesomewhatvariable,dependingonlocalconditions.Ouraimistobroadlycaptureandcontrast the levels of accuracy required to achieve dif-ferentbenefits,ratherthantoexactlyspecifytheac-curacyrequiredtoachieveaparticulargoal.Therefore,wehavechosentofocusonpositionalaccuracyinthehorizontalplane,andaccuracyrequirementsarede-finedintermsofasetofconcentriccirclescentredonthetruepositionoftheharvesterhead.Theradiusofthelargestcirclecontainingtheestimatedpositionoftheheadisusedtospecifythelevelofaccuracyre-quired. Five accuracy categories are considered: >10m, m,dm,cmandmm.Ifabenefitrequiresmmaccuracy,theestimatedpositionoftheheadmustbewithinsev-eralmillimetres(withanupperlimitof1cm)ofitstrueposition.Thecm,dm,andmcategoriesindicatethattheestimatedpositionmustbewithinseveralcenti-metres,decimetresormetersofthetrueposition,re-spectively.Anaccuracyrequirementof>10mindicatesthatthebenefitinquestioncanbeachievediftheesti-matedpositioniswithinacirclehavingaradiusof>10m.Wedidnotdefineanupperlimitforthiscategorybe-causeitisusedtocharacterizebenefitswhoseaccu-racy requirements are relatively low, but naturally there is always some limit.

Estimating the Position of the Harvester Head – a Key Step towards the Precision Forestry ... (147–164) O. Lindroos et al.
Croat. j. for. eng. 36(2015)2 149
2.2 Mapping the forest environmentInformation about the forest environment is re-
quiredtosupportvariousforestryoperationsandthestudy or management of forest ecology. Such informa-tion is useful for answering questions relating to the nature of the standing forest (e.g. how much forest with specificpropertiesdowehave?)andoperationalques-tions (where should the machine drive, where have treesbeenharvested?).Herewefocusonthebenefitsofknowingwheretreesare(orhavebeen)spatiallyposi-tioned and the location of the harvester head.
2.2.1 Reconstructing representative 3D models of forestsThemostobviousapplicationfordataontheloca-
tion of the harvester head is that it could be used to updateexistinginformationonthepositionsoftreesduringharvesting.Analysisofsuchdatawouldmakeitpossibletovirtuallyreconstructtheharvestedtreesbasedonthepropertiesoftheirlogsandtherebygen-erate a 3D model of the harvested forest. In current systems, all trees harvested when the machine is in a given location are assumed to be located in the same placeasthemachine,whichmakesitappearasthoughalloftheharvestedtreesweregrowingontopofeachother(Anon.2010).Thisisawell-knownlimitation,andtree-specificpositionaldatacouldeasilybeincor-poratedintoexistingdatagatheringprotocolsiftherewere some method of gathering it. In this way, it would bepossibletousedatagatheredduringconventionalharvestingtostudythespatialdistributionoftreespe-cies and sizes in the clearcut forest. Information ob-tainedbysuchlargescaledestructivesamplingwouldprobablybeusefulinsilviculturalapplicationsandforestecology.Forinstance, itwouldprovidelargeamountsofrepresentativedatathatcouldbeusedinspatialforestmodelling(e.g.Ariietal.2008,Thorpeetal.2010,Fortinetal.2013).Perhapsmoreinterestingly,3Dforestmodelsofthissortcouldbeusedtopredictthe features of unharvested forests by analyzing the harvesterdatainconjunctionwithinformationgath-ered by remote sensing (see below).
»Estimated accuracy need«: m to dm. The most importantinformationinsuchdatasetsisthepositionsoftreesrelativetooneanother.Accuracyerrorsofsev-eralmeterscouldthuspotentiallybetoleratediftheywere systematic.
2.2.2 Training of ALS and other remote sensing methodsRecentstudieshavedemonstratedthatcombining
automaticallygenerated3Dforestmapswithairbornelaserscanning(ALS)couldbeextremelyuseful.ALS
canprovideveryaccurategeographicalinformationfor large areas of land. Height models of tree crowns andthegroundcanbegeneratedfromALSdataandprocessedusingtreecrownsegmentationalgorithmstoproduceglobaltreemapswithcompletecoverage.Severalvariablesrelatedtocrownshapeandsize,suchasthestemvolume(Hyyppaetal.2008),canthenbeestimated.Today,manualfieldinventoriesconductedingeo
referencedsampleplotsarestillneededtoestablishthemodelsusedtopredictstemattributesfromALSdata(Naessetetal.2004).Inthefuture,localtreemapsgeneratedbyharvestersduringnormalforestryop-erationscouldmakeitpossibletocollectmorerefer-encedata to improvepredictionsandobtainmoredetailed stem data. In this way, normal harvesting wouldserveasaformofdestructivesampling,yield-ing data that could be used to make inferences about similar forest areas. Gathering data in this way during continuouslargescaleforestoperationswouldenablethecreationofasystemforthetrainingandrefinementofALSbasedalgorithmsforlargescalestudies.Treedatacollectedbyharvestersduringharvestingopera-tionshavepreviouslybeenusedtotrainALSdata,butithaseitherbeendonebasedonthemachineposition,inwhichcasetheproblemofhavingmultipletreeswiththesameestimatedpositionarises(Bollandsåsetal.2011),orbasedonmanualpositioninginformationthatwaslinkedtothetreedataafterharvesting(Hol-mgren et al. 2012, Barth and Holmgren 2013).Localmapsgeneratedonthebasisofinformation
onthepositionoftheharvesterheadrelativetothemachinemustbecombinedwithglobalALSmapsinorder toenable thedevelopmentof improvedALSmodels.Inotherwords,thetreesinthelocalmapsgenerated from the harvester data must be matched to treesintheALSmap.Matchingpresentsvariouschal-lenges.First,atree'stopandstumpmayhavedifferentlocations if the tree leans. Second, there may be limita-tions on the ability to identify individual trees within theALSdata.Third,matchingmaybechallengingduetopooraccuracyinmachinepositioning,althoughthisproblemcouldbealleviatedbyusingmatchingalgo-rithmsthatonlytakepositionalinformationfromaGNSS as starting positions (Rossmann et al. 2009,Rossmannetal.2010).SuchanapproachcouldbeusedasanalternativeorcomplementtoGNSS,tohelpim-proveitsrelativelypoorpositionalaccuracyinforestenvironments(Andersenetal.2009,Rodríguez-Pérezetal.2007,NaessetandJonmeister2002).ALSmodelscouldthusberefinedonthebasisofharvesterheaddata and used to feed information back into GNSS systemsinordertoincreasetheirpositionalaccuracy.

O. Lindroos et al. Estimating the Position of the Harvester Head – a Key Step towards the Precision Forestry ... (147–164)
150 Croat. j. for. eng. 36(2015)2
Naturally,thisisnottheonlywayofimprovingthequalityofthedataonthemachine'sposition.Severalproposedsolutionsinvolvesensorsmountedonforestmachinestocreatelocaltreemapsoftheirenviron-mentsinrealtime(Hellströmetal.2009,HellströmandRingdahl2009,Öhmanetal.2008).Thisistypi-cally achieved with a 2D laser scanner combined with SLAM(simultaneouslocalizationandmapping)algo-rithms(Wangetal.2005,Miettinenetal.2007,Huangetal.2008).ToachievehighaccuracyintheSLAMal-gorithms, the centre of the tree must be accurately determined (Dissanayake et al. 2001), which is quite challengingduetotheirregularshapesoftreetrunksandtheirvariabilityovertime(seee.g.Ringdahletal.2013).
»Estimated accuracy need«: dm to m. The most importantaspectofspatialdataforindividualtreesistheaccuracyoftherelativepositionoftrees.Inthisapplication, thepositionsof theharvested tree (asjudgedbythedatafromtheharvester)arematchedtotheestimatedlocationoftreesfromtheALSdata.Con-sequently, as long as there is a good match between thetwodatasets,theycanbeusedtosupportonean-other, reducing the need for high accuracy in the head positiondata.However,ifthetwodatasetsarepoorlymatched,forexampleifsomeharvestedtreescannotbediscernedintheALSdata,highlyaccurateharvest-edtreepositionswouldbeveryimportantbecausetheywouldbeusedasabasisforcorrectingtheALSalgorithms. Overall, however, accuracy errors of sev-eralmeterscouldprobablybetoleratediftheyweresystematic.
2.2.3 Timber traceabilityForest owners must be able to demonstrate that
theirproductionandharvestingoperationsarecon-ductedresponsiblywhensupplyingdemandingendusers.Itis,therefore,importanttoensurethatallprod-uctcomponentsaretraceable.Fortreebasedproducts,this means having the ability to unambiguously deter-minewherethetreesusedinagivenproductweregrowing before being harvested. Traceability require-ments can be met with very low levels of accuracy, and thelevelsachievedbycurrentmachinepositionaldataaregenerallysufficient.Infact,greateraccuracywouldbeoflittleuseandtherearemanyharderchallengesthatshouldbeaddressedfirsttoincreasetraceability.The key missing link is the ability to link the data gath-eredforindividuallogsatdifferentstagesinthechainofcustody,andtothentracethefateofthelogpartsastheyaremixedandblended(thismixingandblendingmaybeextensive–sheetsofpaperaremadeofdis-solvedfibresfromthousandsoftrees).Severalmeth-
ods for tracing the fate of individual logs have been proposed(e.g.Haklietal.2010,Murphyetal.2012,Seideletal.2012,Athanasiadisetal.2013),butfewareimplementedonalargescale.
»Estimated accuracy need«: >10 m. There is gener-ally littleneed toprovide anythingmore than thestand from which a given tree was harvested, and in facteventhislowlevelofaccuracymaybeexcessive.Theupperlimitonthetolerableaccuracyforthisap-plicationdependsonstandsize,thedemandsoftheendusers,andpotentiallyfuturelegalrequirements.
2.2.4 Improved characterization of product propertiesItiswellknownthatthepropertiesofatree'swood
dependontheconditionsunderwhichitisgrown.Silviculturalregimesarethusdesignedtooptimizewoodpropertiessuchasdensity,fibreangles,knotoc-currenceandtaper(Yang2002,Erikssonetal.2006,Persson 1977). Technological developments havemadeitpossibleforharvesterstogatherdatawhilebuckingtreesintologs,includingdataonwoodprop-ertiesthathadnotpreviouslybeenconsideredsuchasstiffness(Murphy2014).Furthermore,whiletreesofthesamespeciescanalsovaryintheirchemicalcom-position(e.g.Arshadietal.2013),dataonthechemicalcompositionofwoodisrarelyusedduringindustrialprocessing.However, theongoingdevelopmentofnewwoodproducts andprocesses, suchasbio-refining,meanthatitmaybecomeincreasinglyimpor-tanttoidentifytreeswithdesirablechemicalproper-ties.Datacollectedbyharvesterscanalreadyprovideindustry relevant information at the stand level (Nor-dströmetal.2010).However,someimportantproper-tiesare likely toberelatedto the tree'sgeo-spatialproperties.Itmay,therefore,beimportanttodeter-minethelocationsofindividualtreesonaglobalmapthatalsorecordsdataonlocalspatialconditionssuchas stand density. Information of this sort, such as the slopeofthelandatreeisgrowingon,thenatureofthesoil at the site, or the density of the tree stand can also becapturedmanuallybytheoperator.However,theneed for manual recording could be reduced or elimi-natedifbetterpositionaldatawereavailable.Aswithtraceability, this would require the ability to link data forindividuallogsfrommultiplepointsinthesupplychain.However,sortingonthebasisofproductfea-tures could be done at a relatively late stage in the supplychain, therebyavoiding theneed forcostlysorting in the forest.
»Estimated accuracy need«: >10 m to 1 m. There is generally littleneedforgreaterpositionalaccuracythanthatprovidedbyexistingsystemswhichsimply

Estimating the Position of the Harvester Head – a Key Step towards the Precision Forestry ... (147–164) O. Lindroos et al.
Croat. j. for. eng. 36(2015)2 151
recordthemachine'sposition.However,theabilitytoprovidemoredetailedinformationonthepropertiesofrawmaterialscouldpotentiallyenablethedevelop-mentoffine-tunedindustrialprocessesthatrequirefeedstockwithtightlydefinedproperties.Itis,there-fore,possiblethattheabilitytodeliverwouldcreatearequirement for greater accuracy.
2.2.5 Calculating the density of tree removalThinningsarenormallyperformedatanintensity
that is chosen so as to leave a residual stand with the densityrequiredtoprovidethebestpossiblecondi-tionsforfuturedevelopment.Traditionally,thinningintensitiesaredefinedusingmeanvaluesforentirestands,oftenintermsofthetotalbasalareathatshouldbeharvested.Agivenintensitycanbeachievedbyfell-ing several thin trees or fewer thicker trees. It can, therefore,bedifficultforoperatorstodecidewhichtreestofelltoachievethedesiredintensity.Moreover,the tree density normally varies somewhat within a stand,makingitevenmoredifficulttodecidewhichtrees to fell. Insomecountries, thisproblemisad-dressed by marking trees to be harvested. However, inNordiccountries,operatorsselectwhichtreestoharvest.Whiletheirselectionsarenormallyconsid-eredtobequitereasonable,theselectionprocessre-quires recurring manual (and thus costly) calibration bytheoperators.Improvementswould,therefore,bebeneficial.Variousmethodshave,therefore,beendeveloped
to calculate thedensity of trees removedper area(StendahlandDahlin2002,Mölleretal.2012).How-ever,thesetechniquesarebasedonthemachine'spo-sition, with estimations of the area harvested for given numbersoftrees.Theyareusefulsincetheyprovidetheoperatorwithrealtimefeedbackontheharvesteddensityduringthinnings,whichcanbecomparedto the desired intensity. The ability to determine the harvesterhead'spositionwouldincreasetheaccuracyof these calculations, enabling better thinning anddocumentation of the variation in removal intensity withinastand.Thiswouldbeusefulinsupportingoperators’decisionmaking.However,thisapproachwouldbealotmorepowerfulifitwerecomplementedby methods for sensing or deducing the density of the residualstand.Machinemountedsensorscouldpo-tentiallyprovideinformationontheresidualstand(e.g.Rossmanetal.2009),butitwillbechallengingtodevelopappropriateandaffordablesensortechnolo-gies.Alternatively,andperhapsmorepracticallyinthenear term, information on the intensity of removal couldbeintegratedwithALSdataonthepropertiesoftheoriginalstand.ProvidedthatALSdatacanbe
usedtoreliablyidentifysmalltreesinthelowerpartsofthecanopy,spatiallyspecificthinningregimescouldbedesignedandimplementedbycalculatingtheden-sityoftheresidualstandasthedifferencebetweenthatoftheoriginalstand(determinedfromtheALSdata)and the harvested density (determined from the data suppliedbytheharvester).Harvesterheadpositioningdatacouldthusenableoperatorstoimplementdesiredthinning regimes more easily and accurately.»Estimatedaccuracyneed«:>10mto1m.Existing
methods(Mölleretal.2012)arefunctionalwithposi-tional accuracies in the >10 m range, since they use informationonthepositionofthemachineratherthanthehead.Ahigherpositionalresolutionwouldbeben-eficial for thedevelopmentofdetailedthinningre-gimes,butwouldprobablybemostusefulfortrainingtheALSmodelsusedtoestimatetheinitialstandden-sityandspatiallyresolvethethinningintensity.
2.2.6 Virtual marking and constrainingIfthepositionoftheharvesterheadwasrecorded,
itcouldpotentiallybeusedasavirtualpentomarkthepositionsofvariousfeaturesondigitalmapsofthehar-vesting site. This would need to be combined with a meansfor theoperator torecordthe identityof themappedfeature.Themostobviousfeaturestorecordin this way would be the locations of created snags, i.e. trees cut at a greater height than normal. In addition, objectsofinterestcouldbemappedbyholdingthehar-vesterheadaboveornexttothem.Inthisway,theloca-tionsofecologicallyand/orculturallyinterestingobjectscouldbereliablyrecordedondigitalmaps.Bordersofvarious kinds could be delineated in a similar way, al-lowing to introduce virtual obstacles to the motion of the harvester and its crane in order to avoid harvest of treesormachinedrivinginpredefinedareas.»Estimatedaccuracyneed«:1mingeneral,butpo-
tentially1dmifdealingwithlegalissuessuchasprop-erty boundaries. However, like current digital and papermaps,thegeneratedmapswouldprobablyjustbe used as indicativemaps, and field inspectionswouldberequiredtoverifythelocationsofspecificobjects.Accuracyatsubmeterlevelswouldthusbeunnecessaryforcurrentapplications,althoughit ispossiblethataccuracydemandswouldbecomemorestringent as data of this sort became readily available andapplicationsweredeveloped.
2.3 Mapping and controlling machine movementsReliableandaccurateinformationonthepositions
ofindividualmachinepartsisessentialwhenmap-ping and controllingmachinemovements. Conse-

O. Lindroos et al. Estimating the Position of the Harvester Head – a Key Step towards the Precision Forestry ... (147–164)
152 Croat. j. for. eng. 36(2015)2
quently,theacquisitionandprocessingofsuchinfor-mation is being studied intensively around the world inordertosupportthedevelopmentofmachinesca-pable of autonomous navigation and performingvarious other functions (semi) autonomously. In the contextofforestry,therehasbeensubstantialrecentprogressinthisarea(e.g.Hellströmetal.2009,Mettinetal.2009,Rossmanetal.2009,Rossmanetal.2010,Ringdahl2011,OrtizMoralesetal.2014),butindus-trial acceptance of such approaches has been lesswidespreadthanisthecaseinrelatedfieldssuchasagriculture.Herewediscussthegeneralbenefitsthatcouldberealizedbyknowingthepositionoftheboomtipofanyforestmachine(e.g.harvesterorforwarder)because they are not related to ecological data col-lectedduringharvesting.Infact,thesebenefitscouldinprinciplebeachievedforanymachinewithahy-draulic crane.
2.3.1 Machine (semi) automationFormostmechanicalmanipulators,itisimportant
tobeabletoestimatetheposition(andorientation)oftheendeffectorinordertoimplementanyformofdecision making concerning its actions. This informa-tioncanbefedintocomputeralgorithmstocontrolthemanipulator’smovementsortoprovideinformationforsupervision.Therequiredaccuracyoftheestimatesusuallydependsontheapplication.Forexample,con-trollingthemotionofamanipulatorrequireshighac-curacyandfastsamplingbecausetheestimatesareusedbycomputersasfeedbackinformationformo-tion control. However, if the information is only need-ed from time to time for supervisory purposes, awider range of measurement resolutions and sam-plingspeedsmaybeacceptable.
Ideas of this sort have been studied for some time withintheforestmachineindustry.Recentdevelop-ments in sensing technologies for cranes have led to theintroductionofoneofthefirstcommercialprod-uctsforcontrollingforestrycranesusingcomputer-ized algorithms (John Deere 2013). Solutions of this sortaresaidtoprovide»boomtipcontrol«(BTC)be-causetheoperatorusesjoystickstocontrolthetip'smovementsratherthanindependentlymanipulatingthe movements of individual sections of the crane arm (e.g. Gellerstedt 2002). This has a number of advan-tages,notleastofwhichisthatitreducesthedifficultyofcontrollingthecrane,makingtheprocessmorein-tuitiveandeasiertolearnwhileimprovingthema-chine'sefficiency(Westerberg2014).AlthoughthecommercializationofBTCrepresents
a milestone for the forest machine industry, various othercomputercontrolledfunctionshavebeensug-
gestedanddevelopedovertheyears.ForinstancetheworkspresentedbyShiriaevetal.(2008),Mettinetal.(2009),Westerberg (2014), andOrtizMorales et al.(2014)discussfutureapplicationsinwhichmostcraneoperationsaregovernedbyamixtureofhumancom-mandsandsemi-autonomousfunctions.Asimpleex-amplewouldbeasystemthatallowedaharvestertoautonomouslyapproachatreethathasbeenselectedforfelling.Itwouldthenbepossibletousetheexistingtechnologytocontrolthegrippingandfellingofthetree,whichcouldbeperformedmanuallyorbytakingadvantage of other modes of interaction such as voice commands. The automation of forwarder cranes wouldalsoofferseveraladvantagesbecauseitcouldreducetheoperator’smentalfatiguebyautomatingthe movement of the crane between bunk and log piles.Thisisalsobeneficialintermsofefficiencybe-causecomputersaresignificantlybetterthanpeopleatidentifyingoptimalworkingconditionsintermsofspeedofwork,fuelconsumption,energyusage,andsoon(Westerberg2014).Additionally,thistechnologyalsooffersthepossibilitytoimproveoperatorandma-chinesafetybyapplyingvirtualrestrictionstoharmfulcrane movements.Despitethevarioustechnologicaladvancesunder-
pinningthesesolutionsandtheircommercialsuccess,therearestillmajorchallengestoovercomeintheau-tomationofforestrymachines.Akeychallengestemsfrom the highly unstructured nature of the forest en-vironment,whichwillnecessitatethedevelopmentofreliable sensing technologies. In addition, consider-ablefurtherprogressinroboticswillberequiredtoenablefullyautomatedforestryoperations.
»Estimated accuracy need«: mm to cm. The re-quiredaccuracyvariesfromapplicationtoapplication.However, an accuracy in the centimetre range is es-sential for efficient autonomous cranemovement;lowerlevelsofaccuracywouldimpairthefunctioningof the control algorithms and risk damaging the ma-chineortrees.Thegreaterthesophisticationandau-tonomy of the control system, the greater the level of accuracy required.
2.3.2 Improving operators’ working methodsOperatingforestmachinesisknowntobechalleng-
ing because many tasks must be conducted simultane-ouslyandathighspeed(e.g.Gellerstedt2002,Ovas-kainenandHeikkilä2007).Operatorsaretrainedtohandle the machines, but as with most trades, there areoftenseveralwaysofaccomplishingagiventask,particularlygiventheheterogeneityofforestenviron-ments.Itis,therefore,difficulttoidentifythemostef-ficientworkingmethodforaparticularsituationand

Estimating the Position of the Harvester Head – a Key Step towards the Precision Forestry ... (147–164) O. Lindroos et al.
Croat. j. for. eng. 36(2015)2 153
task.Thedevelopmentofscreenbasedforestmachinesimulatorshasfacilitatedthetrainingofmachineop-erators, allowing education and evaluation to be con-ducted in virtual environments (e.g. Ovaskainen 2005).However,thescopeforpracticalevaluationofspecificworkingmethodsiscurrentlylimited.Studiesonthetimeconsumptionassociatedwithspecificele-mentsofaworkingmethodcanbehelpfulbuttheirresults are not readily translated into assessments of theefficiencyofagivenapproach.Akeyprobleminsuchanalysesisthat,whileexperiencedindividualscanrelativelyeasilyassessthegeneralefficiencyofanoperatorafterbrieflyobservingtheirwork,theygener-allycannoteasilyexplainindetailthereasonsfortheirjudgement(PurfürstandLindroos2011).However,ifcrane movements could be monitored, the resulting datamightenabletheanalysisofefficientworkingmethods,whichcouldthenbetaughttootheropera-tors. For instance,OrtizMorales et al. (2014)haveshownthatoperators’workingpracticescanbeim-provedbymonitoringtheircranemovementsandus-ingmotionoptimizationtoanalyzetheirworkingpat-ternsandsuggestwaysofincreasingefficiency.Theresultsofsuchstudieshavedirectapplicationsinareassuchasthetrainingofmachineoperators,automation,information management and interaction design.»Estimatedaccuracyneed«:dm.Apositionalac-
curacyofafewdecimetresshouldbesufficienttoiden-tifythemostefficientcranemovementpatternsformosttypesofwork.Giventhegreatdiversityofwork-ingconditionsencounteredinpracticalforestryandthehighlevelsofvariationinthewaydifferentopera-torsperformdifferentmovements,greateraccuracyisunlikelytobeparticularlyusefulinthiscontext.More-over,itisunlikelythatanoperatorwouldbeabletofollowagivencranepathwithbetteraccuracythansomedecimetres,giventhetimeconstraintsthatapplyduring normal work.
3. Methods for estimating harvester head pose
3.1 Working conditions and required featuresBefore discussing methods that could be used to
monitorthepositionoftheharvesterhead,itisimpor-tanttodefinetheconditionsunderwhichthesemeth-ods must function. Forest work is conducted all year roundinunstructuredterrain,whichimpliesahighvariation in temperature, humidity and visibility.Moreover,forestmachinesmoveandvibrateduetoboth the work they do and the movements of the ma-chine through the rough terrain. In addition, the ma-chine's engine makes the environment noisy. Since for-
estry work involves harvesting trees, the machine and its sensors are at risk of being hit by trees or branches. Finally, the forest environment is dirty; the machine willbeexposedtosoil,sawdust,rain,andpossiblyalso snow, all of which may accumulate on its sensors. There are also two other factors that should be consid-ered.First,theharvesterheadwilltypicallybewithin10mofthemachinebecauseitspositionislimitedbythereachofthecrane.Second,forestryoperationsarecost sensitive, so any method used to monitor the head positionmustnotgreatlyincreasethecostofthework.Inmostnonforestrycontexts,themostpractical
way of obtaining robust and high resolution data on thepositionofthemanipulatoristousesensorsthatarephysicallyattachedtoit.Awiderangeofsuitablesensorsofdifferentpricesandsizesareavailable.Asa rule of thumb, more accurate sensors are more cost-ly.Asecondfactortoconsiderwhenmountingsensorsonamanipulatorrelatestotheextrahardwareneeded.Forinstance,externalmountingoftenrequiresaddi-tionalmechanicalsupport,holders,screws,etc.,whichwillprobablyhavetobecustomizedbecausetherel-evantcomponentswillnotnecessarilybecommer-cially available. This may also be the case for any ad-ditional cabling and electronic devices required for dataacquisition.Inaddition,realtimedataprocessingisrequiredtoachievemostofthebenefitsdiscussedintheprecedingsection.Therefore,fastcomputersarerequired.
In summary, an ideal method should be relatively economical, robust enough to tolerate harsh and var-iedforestconditions,andinstantaneouslyprovideac-curate data.
3.2 Overview of methodsMethodsfordeterminingthelocationofaharvest-
erheadmaybeeitherlocalorglobal,dependingonthe location of the »base coordinate system« (CS). Lo-calmethodsuse aCSfixed to theharvesterwhileglobalmethodsuseaCSfixedtotheground.Methodscan also be categorized according to the level of infor-mationtheyprovideonthehead'slocation.Thefull»pose«ofanobjectin3Disasetofsixnumbersde-finedrelativetothechosenCSthatspecifythehead's»position«inspaceandits»orientation«.The»orienta-tion«or»attitude«isasetofthreenumbersdescribingthehead'splacementintermsofrotationsaroundthethreecoordinateaxes.The»position«isanothersetofthreenumbersthatdefinethehead'slocationintermsoftranslationsoroffsetsalongthecoordinateaxes.Differentapplicationsmayrequiredifferentcom-
ponentsofthefullpose,whichcanbemeasuredineither relative or absolute fashion. To identify a tree

O. Lindroos et al. Estimating the Position of the Harvester Head – a Key Step towards the Precision Forestry ... (147–164)
154 Croat. j. for. eng. 36(2015)2
selectedforharvestingonamap,itistypicallysuffi-cienttoprovideonlythepositionoftheharvesterheadwithrespecttothe x and yaxes(inglobalcoordinates).In contrast, semi-autonomous control of a crane dur-ingharvestingoperationsrequiresthefullpose,ex-pressedrelativetotheharvester.Anoverviewofexistingmethodsforlocalposees-
timation is given below. The discussion is limited to local techniques because, in most cases relevant to har-vesters,itissufficienttoknowtheposerelativetothemachine.Furthermore,alocalposecanbeeasilytrans-formedintoaglobaloneiftheglobalposeofthelocalCSisknown.Themethodspresentedaregroupedintofour different categories: »Angle and range-basedmethods«derivetheposebyestimatingtheanglesand/or ranges (distances) between a number of sen-sors and the harvester head. »Joint estimating meth-ods«estimatetheposebasedonthegeometryofthecrane combinedwithdirectmeasurementsof jointanglesanddisplacements.»Inertialtechniques«useacombinationofaccelerometers,gyroscopes,andmag-netometers, while »tilt sensors« estimate the static posebysensingthehead'sorientationwithrespecttotheearth’sgravitationalfield.
3.3 Angle and range based methodsPosescanbeestimatedbymeasuringvariousangles,
i.e.bytriangulation.Wiklundetal.(1988)describedtheuseofarotatinglaserplacedontheroofofanautono-mousguidedvehicle(AGV)toestimatethevehicle'sposebymeasuringtheanglesbetweenthevehicle'slongaxisandassortedreflectorsplacedatknownpointsintheenvironment.Alternatively,itispossibletohaveasimilarsysteminwhichthefixeddevicesarethesig-nal sources: Chunhan et al. (2003) used infra-red emit-tersplacedatfixedpositionsandmeasuredtheincidentangleoftheiremittedlightonasensorplacedontheobjectwhosepositionwastobedetermined.Onelimitationofthisapproachisthatitrequiresa
clear line of sight to the harvester head. Given that the head rotates, this might be hard to achieve. Locating thereflectorsontheboomtipcouldpotentiallysolvethisproblem.However,evenif thereflectorscouldalwaysbepointedinthedesireddirection,thelineofsight could be blocked by obstacles (e.g. trees, under-growth,stones)oratmosphericconditions(e.g.fog,rain, snow or dust). Given a free line of sight to a vis-iblereflector,triangulationshouldbeabletodeter-minethepositionofthehead(relativetotheharvester)with cm to dm accuracy.Posescanalsobeestimatedbyvarious typesof
range estimations (trilateration). Satellite navigation systemssuchasGNSSutilizethisapproachtoestimate
globalposesfrom»timeofflight«dataforradiosignalsbroadcast simultaneously from several satellites. The GNSSreceiverisplacedontheobjecttobelocalized.Essentialforthistechniqueisexacttimesynchroniza-tion, which is achieved by using more satellites than would otherwise be necessary. Trilateration is also used insomelocalmethods.Smithetal.(2004)presentedatechniqueforindoorpositioningthatdoesnotrequiresynchronization.Inthisapproach,rangeisestimatedfrom»timeofflight«dataforultrasonicpulsestrans-mittedfrombeaconsplacedintheenvironment,andradio waves are used to synchronize transmission. It is alsopossibletoplacetheultrasonictransmitterontheobjecttobelocalized,asisdoneinthe»ActiveBat«location system (Harter et al. 1999). In such cases, the poseoftheobjectisdeterminedonthebasisofsignalspickedupbyseveralfixedreceivers.One potential solution based on this approach
wouldbetosimplyequiptheharvesterheadwithaseparateGNSSreceiver.However,theresultingdatawouldhavethesamelimitedaccuracyastheGNSSpo-sitioningdataforthemachine.Thus,untilbetterGNSSaccuracy is achieved, it seems more suitable to estimate theharvesterhead'spositionrelativetothemachine.
If both angular and range data are available, a sin-glemeasurementmaybesufficient tospecify theobject'sposition.Theobject'spositioninCartesianco-ordinates can be easily obtained by conversion from polarcoordinates.Severaltypesofsensorscanbeuti-lized to obtain combined angular and range measure-ments.Forexample,laserscannersemitlaserbeamsand directly measure the angular coordinates and linear displacementofobjectsthatreflectthosebeamsintoa2Dplaneinfrontofthescanner.Todeterminetheposi-tionofaspecificobject,itmustbeidentifiedinthelaserscan such that the relevant angle and range are deter-mined.Dependingonthetypeoflaserusedandthenatureoftheobject,thismaybequitechallenging(foranexample,seethesectiononfieldexperiment2).
Cameras can also be utilized as described by Davi-sonandKita(2002),whoemployedstereovisiontodetectamarkeronthetargetobjectandtherebydeter-mineits3Dpositionand2Dorientation.
These methods require a (reasonably) clear line of sightandtheabilitytodistinguishthedesiredobject(i.e. the harvester head and/or the tree to be harvested) fromothernearbyobjects.Providedthatthesecondi-tionsaresatisfied,techniquessuchaslaserscanningcanprovideveryaccurate(mmtocm)estimatesoftheharvester head's position relative to themachine.Camerabasedtechniquesaretypicallylessaccuratebutshouldstillbecapableofprovidingdatawitharesolutionofafewcentimetres.Manyofthesemeth-
Estimating the Position of the Harvester Head – a Key Step towards the Precision Forestry ... (147–164) O. Lindroos et al.
Croat. j. for. eng. 36(2015)2 155
odsofferatradeoffbetweenaccuracyanddatapro-cessingtime.Forinstance,contemporary3Dlaserscanprovidehighaccuracyandhighresolutiondataforeasyobjectidentification,butnot(yet)inrealtime.
3.4 Joint estimating methodsTheposeofanendeffectorcanbeestimatedfrom
jointvaluesandtheknowngeometryofthesystemonwhichtheeffectorismounted.ThegeometrycanoftenbeobtainedwithhighaccuracyfromCAD/SolidWorksmodels,andvarioustypesofsensorscanbeattachedto the system to monitor the rotational and transla-tionalmotionofitsindividualjoints.Theresolutionofan estimate obtained in this way is, according to the ISO9283standard,definedasthesmallestincrementalmovementthatcanbesensed.Foraserialmanipulatorof Njoints,theresolutionoftheestimatedendeffectorposecanbeapproximatedas:
( )N
i ii 1
Resolution d q qd=
= ×∑ (1)
Where:
id distancebetweentheendeffectorendpointandrotationalaxisoftheithjoint;
q vectorofmeasuredjointangles;
iqd resolution of the ith sensor.Consequently,theresolutionisnonlinearlydepen-
dentonthejointsandcannotbespecifiedexplicitlyusinga singlevalueor range.Anumberof sensortypescanbeusedtoestimatejointangles;somethatare widely used in robotics are discussed below.
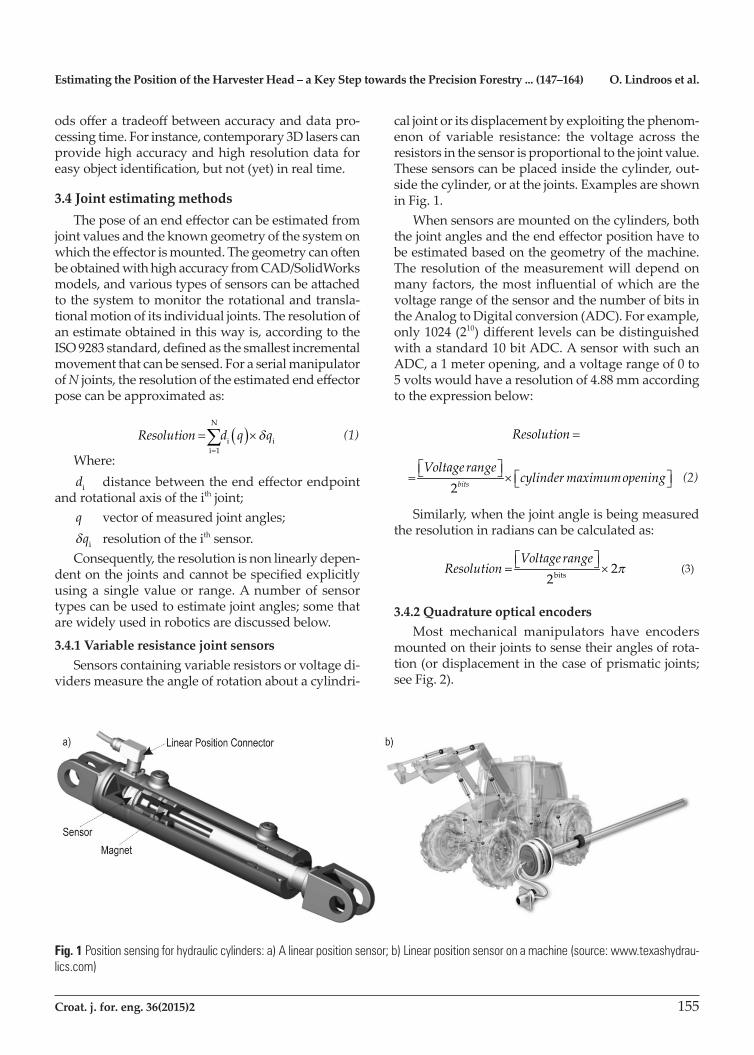
3.4.1 Variable resistance joint sensorsSensors containing variable resistors or voltage di-
viders measure the angle of rotation about a cylindri-
caljointoritsdisplacementbyexploitingthephenom-enon of variable resistance: the voltage across the resistorsinthesensorisproportionaltothejointvalue.Thesesensorscanbeplacedinsidethecylinder,out-sidethecylinder,oratthejoints.Examplesareshownin Fig. 1.Whensensorsaremountedonthecylinders,both
thejointanglesandtheendeffectorpositionhavetobe estimated based on the geometry of the machine. Theresolutionofthemeasurementwilldependonmanyfactors, themost influentialofwhicharethevoltage range of the sensor and the number of bits in theAnalogtoDigitalconversion(ADC).Forexample,only 1024 (210)differentlevelscanbedistinguishedwithastandard10bitADC.AsensorwithsuchanADC,a1meteropening,andavoltagerangeof0to5 volts would have a resolution of 4.88 mm according totheexpressionbelow:
2bits
Voltage rangeResolution cylinder maximumopening
= ×
2bits
Voltage rangeResolution cylinder maximumopening
= × (2)
Similarly,whenthejointangleisbeingmeasuredthe resolution in radians can be calculated as:
bits
2
2Voltage range
Resolution p = × (3)
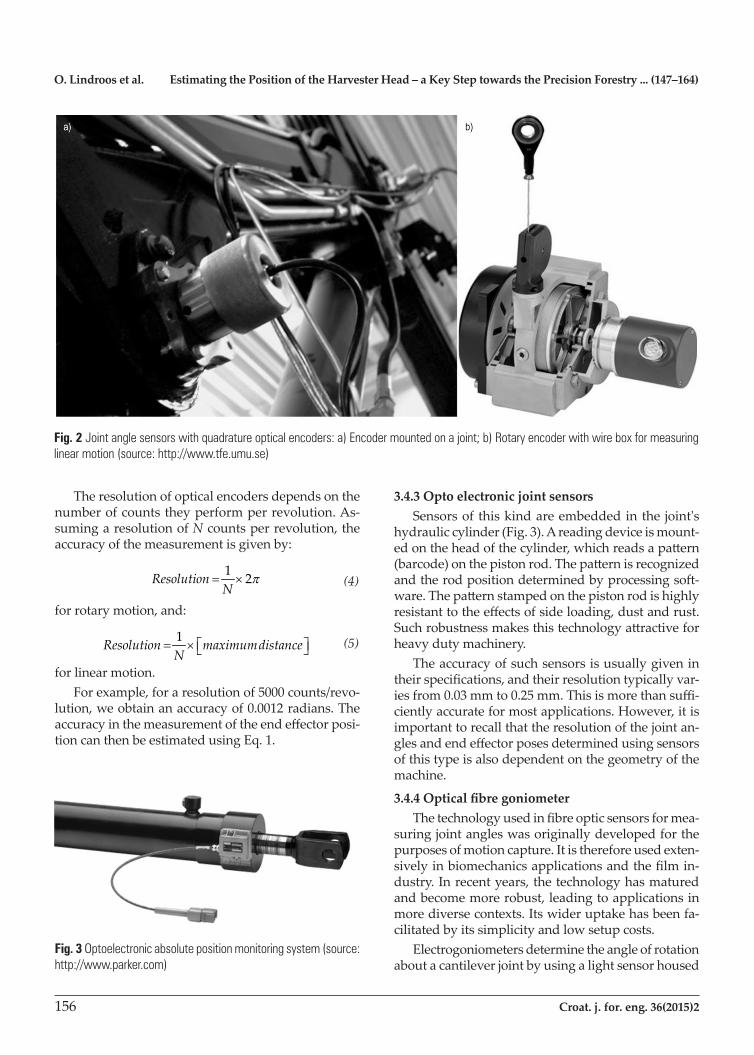
3.4.2 Quadrature optical encodersMost mechanical manipulators have encoders
mountedontheirjointstosensetheiranglesofrota-tion(ordisplacementinthecaseofprismaticjoints;see Fig. 2).
Fig. 1 Position sensing for hydraulic cylinders: a) A linear position sensor; b) Linear position sensor on a machine (source: www.texashydrau-lics.com)
O. Lindroos et al. Estimating the Position of the Harvester Head – a Key Step towards the Precision Forestry ... (147–164)
156 Croat. j. for. eng. 36(2015)2
Theresolutionofopticalencodersdependsonthenumberofcountstheyperformperrevolution.As-suming a resolution of Ncountsperrevolution,theaccuracy of the measurement is given by:
1 2ResolutionN
p= × (4)
for rotary motion, and:
1 Resolution maximumdistanceN
= × (5)
for linear motion.Forexample,foraresolutionof5000counts/revo-
lution, we obtain an accuracy of 0.0012 radians. The accuracyinthemeasurementoftheendeffectorposi-tion can then be estimated using Eq. 1.
3.4.3 Opto electronic joint sensorsSensorsofthiskindareembeddedinthe joint's
hydrauliccylinder(Fig.3).Areadingdeviceismount-edontheheadofthecylinder,whichreadsapattern(barcode)onthepistonrod.Thepatternisrecognizedandtherodpositiondeterminedbyprocessingsoft-ware.Thepatternstampedonthepistonrodishighlyresistanttotheeffectsofsideloading,dustandrust.Suchrobustnessmakesthistechnologyattractiveforheavy duty machinery.
The accuracy of such sensors is usually given in theirspecifications,andtheirresolutiontypicallyvar-iesfrom0.03mmto0.25mm.Thisismorethansuffi-cientlyaccurateformostapplications.However,itisimportanttorecallthattheresolutionofthejointan-glesandendeffectorposesdeterminedusingsensorsofthistypeisalsodependentonthegeometryofthemachine.
3.4.4 Optical fibre goniometerThetechnologyusedinfibreopticsensorsformea-
suringjointangleswasoriginallydevelopedforthepurposesofmotioncapture.Itisthereforeusedexten-sivelyinbiomechanicsapplicationsandthefilmin-dustry. In recent years, the technology has matured andbecomemorerobust,leadingtoapplicationsinmorediversecontexts.Itswideruptakehasbeenfa-cilitatedbyitssimplicityandlowsetupcosts.
Electrogoniometers determine the angle of rotation aboutacantileverjointbyusingalightsensorhoused
Fig. 2 Joint angle sensors with quadrature optical encoders: a) Encoder mounted on a joint; b) Rotary encoder with wire box for measuring linear motion (source: http://www.tfe.umu.se)
Fig. 3 Optoelectronic absolute position monitoring system (source: http://www.parker.com)

Estimating the Position of the Harvester Head – a Key Step towards the Precision Forestry ... (147–164) O. Lindroos et al.
Croat. j. for. eng. 36(2015)2 157
inanenclosuretomeasuretheamountoflightpassingthroughapairofopticfibresrunningalongthelengthof the cantilever (Fig. 4a). The resolution of the mea-surementdeviceistypicallyspecifiedbytheproductmanufacturer, and usually varies from 0.01 to 0.1 de-grees (0.000174 to 0.0017 radians).
Once again, the resolution for the ultimate mea-surementoftheendeffectorpositioncanbecalculatedusing Eq. 1.
3.5 Inertial techniques and tilt sensorsInertialmeasurementunits (IMUs)areused for
measuring velocity, orientation, and gravitational forces.UsuallyanIMUisaboxcontainingsensorsofthreetypes;accelerometers,gyroscopesandmagne-tometers.Inmodernmachineapplications,IMUsareattacheddirectlytothelinksinaruggedrobustbox,as shown in Fig. 5. To avoid the overhead of installing externalcables,theyareoftenwireless.ThesekindsofIMUsaretypicallybasedonme-
chanicalprinciplesandareequippedwithelectronics
that generate measurements in the form of electrical signals.AssumingthemeasuringdeviceincorporatesanADC,theresolutionofitsmeasurementscanbeestimated using Eq. 2 and Eq. 3.AproblemoftenencounteredusingIMUsisthat,
while velocity and acceleration are reliably measured, itisdifficulttoobtainreliablepositionalinformation.Thisisbecauseenvironmentalfactors(e.g.thepres-enceofnearbymetals,magneticfields,radiosignals,etc.)maycausetheoutputofthemagnetometerstofluctuate.Additionalsoftwareestimationisrequiredtocopewiththisproblem.Observerbasedestimationtechniques,suchasKalmanfiltering,areusedtocom-bine the information from the accelerometers and gy-roscopesoftheIMUandobtainstatisticallyoptimalestimatesofthesystem's3Dpositionandangularori-entation.Using thesedata and simplegeometricalrelationships,itispossibletoestimatetheposeoftheendeffector.Itisdifficulttoquantifytheresolutionofthesemeasurementsbecauseitdependsonthesoft-warethatisused.Algorithmicestimationcanbeveryaccurate, regardless of the sensor resolution, because itisundertheprogrammer’scontrol.ThisisthemainreasonwhyIMUtechnologyhasbeenwidelyusedforwireless sensing in diverse industries including mo-tioncapture,biomedicine,unmannedaerialvehiclesand robotics.
4. Matching benefits to methods for estimating the location of the harvester
headTheaccuracyrequiredtorealizeaparticularben-
efitisnotbyitselfsufficienttodeterminewhichsens-ingtechnologiesarebestsuitedtodeliverthatbenefit.Moreimportantcriteriaarethetimeconstraintsandthenumberofpositionsatwhichsensorsarerequired.Therefore,webrieflyoutlinetheanticipatedposition-ingprocessandthenpresentamatchingmatrixthatcomparesthevariousbenefitsachievablewithheadpositioningdata to themethodsof acquiring suchdata.
4.1 The positioning processDifferent applicationshavedifferentpositional
informationrequirements.Ingeneral,eitherpointorcontinuousestimatesareneeded.Pointestimatespro-videinformationonthepositionoftheharvesterheadat specificpoints in time; they areuseful in caseswhereitisnecessarytoknowthepositionofahar-vestedtree,forexample.Mostindirectapplications(e.g. thoseassociatedwithecologicalmapping)re-quirepointestimates.Conversely,directbenefitssuch
Fig. 4 Fibre optic electrogoniometer sensors: a) Joint angle elect-rogoniometer sensor; b) Manipulator with built in electrogoniom-eter sensors (source: http://www.adinstruments.com/)
Fig. 5 Joint angle sensing on a machine fitted with IMUs: a) Place-ment of IMUs on an excavator; b) A ruggedized IMU (source: http://www.topconpositioning.com)
O. Lindroos et al. Estimating the Position of the Harvester Head – a Key Step towards the Precision Forestry ... (147–164)
158 Croat. j. for. eng. 36(2015)2
asthoseassociatedwithmappingandcontrollingma-chinemovementsrequireacontinuousflowofinfor-mation on the location of the head. In automation applicationsthisflowmustbesuppliedinrealtime,whichinevitablyrequireshighprocessingcapacity.Pointestimatespresentlessofachallengebutre-
quireprecisecontroloverwhichpositionsareesti-mated. This can be achieved by connecting the estima-tionprocesstospecificmachinecommands.Duringharvesting,theharvesterheadgraspsthetreewhenitis felled. Therefore, if the location and the direction of apointontheharvesterheadareknown,thepositionof the tree's centre can be determined. The estimation ofthehead'sposition(andthusthetree'sposition)canbesynchronizedwiththeactionofcuttingthetree,during which the harvester head is held still for a sec-ond or two to enable the chainsaw to cut through the stem. In this case, the harvester head would be in the desired location during the few seconds between be-ingmovedtowardsthetreeandthepointatwhichthetree starts to fall. Once the tree is felled, the harvester head and tree are moved to enable subsequently cut logstofallintoseparateassortmentpiles.Thepositionmeasurements must, therefore, be acquired quickly becausetheheadspendsrelativelylittletimeinthedesiredposition,andthereistypicallyonly30secondsorsobetweentreefellings.Moreover,onceagiventree'spositionhasbeendetermined,itmustbesavedand linked to each of the logs that are subsequently cut from the tree (together with information on the tree'slength,taper,species,andsoon).Theentirepro-cessmustthenberepeatedwhenthenexttreeisfelled.
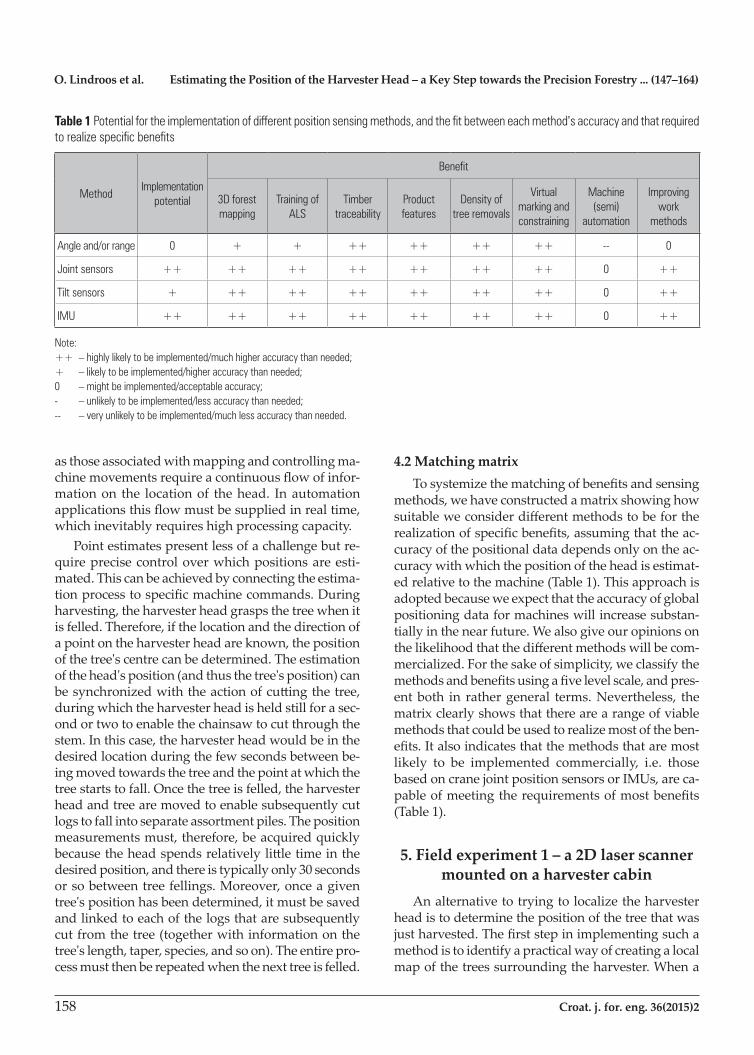
4.2 Matching matrixTosystemizethematchingofbenefitsandsensing
methods,wehaveconstructedamatrixshowinghowsuitableweconsiderdifferentmethodstobefortherealizationofspecificbenefits,assumingthattheac-curacyofthepositionaldatadependsonlyontheac-curacywithwhichthepositionoftheheadisestimat-edrelativetothemachine(Table1).Thisapproachisadoptedbecauseweexpectthattheaccuracyofglobalpositioningdataformachineswillincreasesubstan-tiallyinthenearfuture.Wealsogiveouropinionsonthelikelihoodthatthedifferentmethodswillbecom-mercialized.Forthesakeofsimplicity,weclassifythemethodsandbenefitsusingafivelevelscale,andpres-ent both in rather general terms. Nevertheless, the matrixclearlyshowsthattherearearangeofviablemethods that could be used to realize most of the ben-efits.Italsoindicatesthatthemethodsthataremostlikely to be implemented commercially, i.e. thosebasedoncranejointpositionsensorsorIMUs,areca-pableofmeetingtherequirementsofmostbenefits(Table 1).
5. Field experiment 1 – a 2D laser scanner mounted on a harvester cabin
Analternativetotryingtolocalizetheharvesterheadistodeterminethepositionofthetreethatwasjustharvested.Thefirststepinimplementingsuchamethodistoidentifyapracticalwayofcreatingalocalmapofthetreessurroundingtheharvester.Whena
Table 1 Potential for the implementation of different position sensing methods, and the fit between each method's accuracy and that required to realize specific benefits
MethodImplementation
potential
Benefit
3D forest mapping
Training of ALS
Timber traceability
Product features
Density of tree removals
Virtual marking and constraining
Machine (semi)
automation
Improving work
methods
Angle and/or range 0 + + ++ ++ ++ ++ -- 0
Joint sensors ++ ++ ++ ++ ++ ++ ++ 0 ++
Tilt sensors + ++ ++ ++ ++ ++ ++ 0 ++
IMU ++ ++ ++ ++ ++ ++ ++ 0 ++
Note:++ – highly likely to be implemented/much higher accuracy than needed;+ – likely to be implemented/higher accuracy than needed;0 – might be implemented/acceptable accuracy;- – unlikely to be implemented/less accuracy than needed;-- – very unlikely to be implemented/much less accuracy than needed.

Estimating the Position of the Harvester Head – a Key Step towards the Precision Forestry ... (147–164) O. Lindroos et al.
Croat. j. for. eng. 36(2015)2 159
tree is harvested, we should be able to detect which treeismissingfromthismap.Thereliabilityofthistreedetectionprocesscanbeimprovedbyaccurateestimations of tree diameter. In this section, we de-scribetwodifferentfieldexperimentsusingaSICKLMS2212Dlaserscannertodetecttrees.Theangularresolutionofasinglelaserbeamemittedbythescan-nerwas0.25°anditsfieldofviewis100°.Eachscanconsistedof401beams.Accordingtothemanufac-turer, the laser scanner had a measurement range of upto80m,andameasurementaccuracyof±3.5cmforrangesupto20m.However,totakeadvantageofthis high accuracy, trees must be distinguished from otherobjects(e.g.brush,branches,rocks,etc.).There-fore, a key goal of the study was to evaluate the utility of data collected using a 2D laser mounted on a har-vester.Inthefirstexperiment(Hellströmetal.2012),the
laserscannerwasmountedontopofaharvestercabin.Measurementswereacquiredatthreedifferentloca-tions in the same forest, with varying degrees of vi-sual obstruction due to branches, leaves, needles, and so on. To identify trees from laser scanning data, the first thing thatmustbedone is tocluster the laserpoints.Thiswasdoneusinganalgorithmdevelopedby Jutilaetal. (2007)withminormodifications.Tovalidate the clusters, the estimated diameter of each tree cluster has to be calculated and checked to ensure that it is within a reasonable range (between 15 and 80cminourstudy).Weimplementedandtestedtheaccuracyofseveraldifferentmethodsforcalculatingtree diameters from clusters in the laser scanning data.The tree identification algorithmwas found to
work reasonably well even at a forest site with quite severe visual obstruction due to branches and needles. However,atreethatwasidentifiedinonelaserscanwasnotalwaysdetectedinthenexteventhoughthescanner was not moved between scans. It also failed to detect all trees. Some trees were blocked by the har-vester crane and some were blocked by other trees or branches. Several methods for enhancing tree detec-tion were evaluated, such as using median values from several consecutive scans. Overall, however, it was concluded that 2D laser scanners are not suitable or reliable for detecting recently harvested trees due to uncertaintiesintreedetectionefficiency.However,thedetectedtreesdidappeartohavebeenpositionedwithat least cm level accuracy (although this was not inves-tigated rigorously).Anotherpossibleuseforthistreedetectionmethod
is to localize the vehicle relative to the surrounding trees.Bygeneratingalocaltreemapandmatchingitwithaglobalmap,whichcouldbegeneratedfrom
ALSdata,themachine'spositioncanbedeterminedmoreexactlythanwouldbepossiblebyusingaGNSS(Rossmanet.al2010),whichhasobviouslimitationsindenseforests.Inthisscenario,itisnotnecessarytofindalltrees(oraspecificone);weneedonlyfindenoughtrees to allow the accurate matching of local and glob-almaps.Theresultsobtainedusingdifferentmethodsfor
estimating tree diameter varied considerably between thethreeexperimentalsitesandalsobetweenmeth-ods.Theaverageerrorforthedifferentmethodsvar-ied between 40% and 90%. No method was best for all circumstances. Since estimated diameters are used to validateidentifiedtreeclusters,amoreaccuratediam-eter estimation method should increase the number of treesidentifiedinagivenlaserscanandthusmakeiteasiertofilteroutclustersthatdonotcorrespondtotrees.Todevelopbettermethodsfordiameterestima-tion, we conducted a second experiment indoors(Ringdahletal.2013)usingninetreetrunksectionswithdiametersof 6–50 cm.The tree sectionswereplacedoneatatimeinanindoorcorridor,atdistancesvaryingbetween5and20meters,withdifferentsidesfacing the laser scanner. In total, we measured 172 combinations of stem section diameters and distances. For each measurement, the tree's real diameter was manuallymeasuredwithmmaccuracyusingacaliperatthespotwherethelaserbeamshit.Thesamecluster-ing algorithm as described above was used to identify trees in the laser scan. However, since there was only one tree in each scan, there was no need for validation of the clustering.
The algorithms for diameter estimation evaluated inthepreviousexperimentwereusedagaininthisstudy.Wealsodevelopedenhancedalgorithmsthatcompensatefortheeffectofthebeamwidthandrelyonmultiplescans.Thebestexistingalgorithmsoveres-timated the tree trunk diameters by ca. 40%. Our en-hanced algorithms reduced this error to less than 12%.Thetested2Dlaserscannerthusprovedtobeun-
suitableforestimatingthepositionsofeitherharvest-edtreesortheharvesterhead.However,itsoutputmaybeusefulinimprovingtheaccuracywithwhichthemachine'spositionisdetermined,therebyincreas-ing the accuracy of other methods for estimating the headpositionrelativetothemachine.
6. Field experiment 2 – encoders on crane joints
Avery reliablemethodused for estimating theboomtipcoordinatesofforestrycranesistomonitor
O. Lindroos et al. Estimating the Position of the Harvester Head – a Key Step towards the Precision Forestry ... (147–164)
160 Croat. j. for. eng. 36(2015)2
theangularmotionoftheirjoints.Belowwepresentsome results from a decade long series of studies (Or-tizMoralesetal.2014,Westerberg2014),whoseresultscontributedtothedevelopmentandrecentreleaseofacommercialproduct(Cranab2013b).Theaimofthisdiscussionistoillustratethepracticalityofthisap-proach togatheringdataon thepositionsof cranebooms. Previous studies (Westerberg 2014) haveshown that the method's accuracy is high enough to supportcraneautomation;usingasimilarapproachto that embodied in Eq. 1, it was determined to be of mmlevel(DanielOrtízetal.2014).AKomatsu830.3forwarder(KomatsuForest2013)
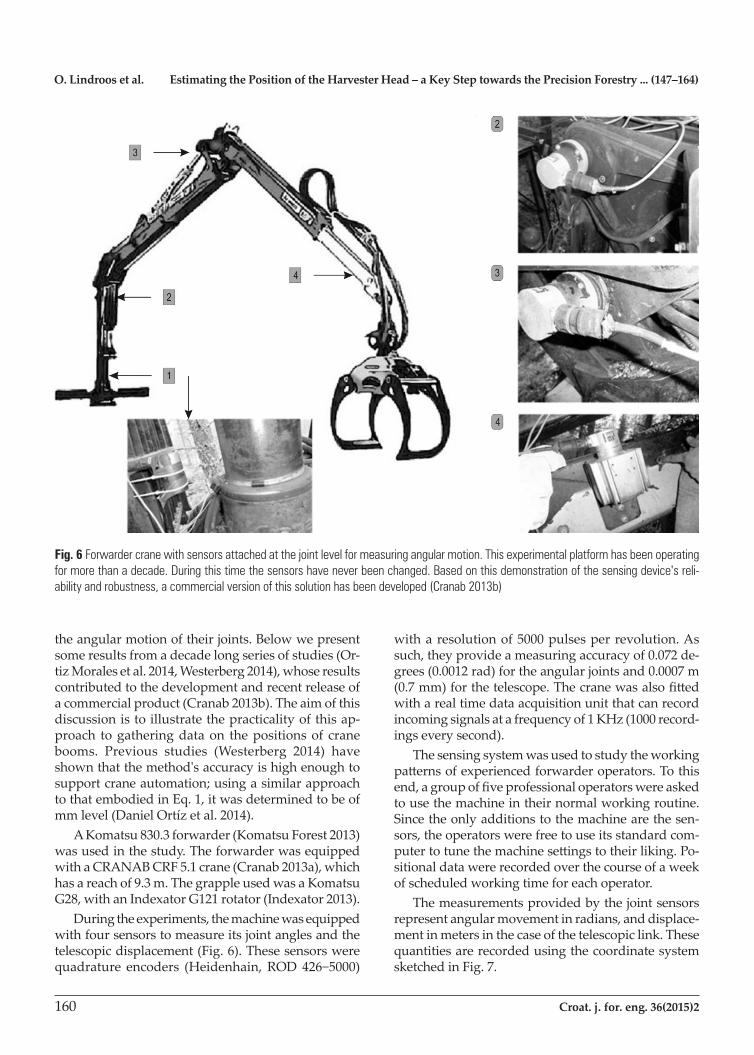
wasusedinthestudy.TheforwarderwasequippedwithaCRANABCRF5.1crane(Cranab2013a),whichhasareachof9.3m.ThegrappleusedwasaKomatsuG28,withanIndexatorG121rotator(Indexator2013).Duringtheexperiments,themachinewasequipped
withfoursensorstomeasureitsjointanglesandthetelescopicdisplacement(Fig.6).Thesesensorswerequadrature encoders (Heidenhain,ROD426−5000)
witharesolutionof5000pulsesperrevolution.Assuch,theyprovideameasuringaccuracyof0.072de-grees(0.0012rad)fortheangularjointsand0.0007m(0.7mm)forthetelescope.Thecranewasalsofittedwith a real time data acquisition unit that can record incoming signals at a frequency of 1 KHz (1000 record-ings every second).
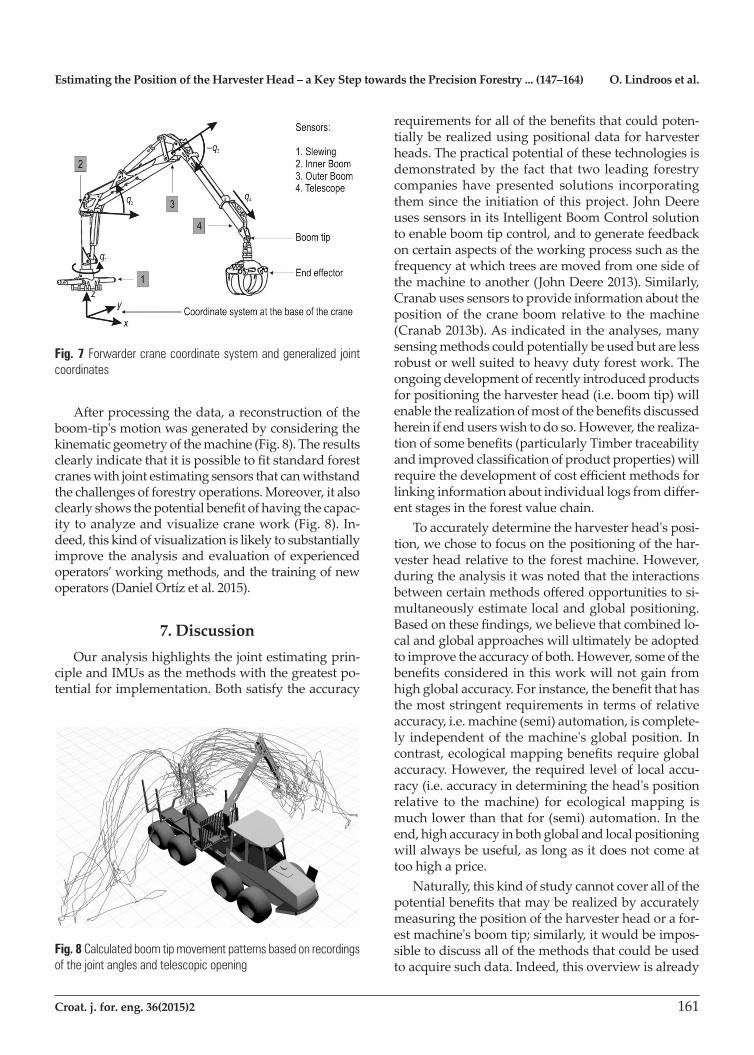
The sensing system was used to study the working patternsofexperiencedforwarderoperators.Tothisend,agroupoffiveprofessionaloperatorswereaskedto use the machine in their normal working routine. Since the only additions to the machine are the sen-sors,theoperatorswerefreetouseitsstandardcom-putertotunethemachinesettingstotheirliking.Po-sitional data were recorded over the course of a week ofscheduledworkingtimeforeachoperator.Themeasurementsprovidedbythejointsensors
representangularmovementinradians,anddisplace-mentinmetersinthecaseofthetelescopiclink.Thesequantities are recorded using the coordinate system sketched in Fig. 7.
Fig. 6 Forwarder crane with sensors attached at the joint level for measuring angular motion. This experimental platform has been operating for more than a decade. During this time the sensors have never been changed. Based on this demonstration of the sensing device's reli-ability and robustness, a commercial version of this solution has been developed (Cranab 2013b)
Estimating the Position of the Harvester Head – a Key Step towards the Precision Forestry ... (147–164) O. Lindroos et al.
Croat. j. for. eng. 36(2015)2 161
Afterprocessingthedata,areconstructionoftheboom-tip'smotionwasgeneratedbyconsideringthekinematic geometry of the machine (Fig. 8). The results clearlyindicatethatitispossibletofitstandardforestcraneswithjointestimatingsensorsthatcanwithstandthechallengesofforestryoperations.Moreover,italsoclearlyshowsthepotentialbenefitofhavingthecapac-ity to analyze and visualize crane work (Fig. 8). In-deed, this kind of visualization is likely to substantially improvetheanalysisandevaluationofexperiencedoperators’workingmethods,andthetrainingofnewoperators(DanielOrtízetal.2015).
7. DiscussionOuranalysishighlightsthejointestimatingprin-
cipleandIMUsasthemethodswiththegreatestpo-tentialforimplementation.Bothsatisfytheaccuracy
requirementsforallofthebenefitsthatcouldpoten-tiallyberealizedusingpositionaldataforharvesterheads.Thepracticalpotentialofthesetechnologiesisdemonstrated by the fact that two leading forestry companieshavepresented solutions incorporatingthemsincetheinitiationofthisproject.JohnDeereuses sensors in its Intelligent Boom Control solution toenableboomtipcontrol,andtogeneratefeedbackoncertainaspectsoftheworkingprocesssuchasthefrequency at which trees are moved from one side of the machine to another (John Deere 2013). Similarly, Cranabusessensorstoprovideinformationaboutthepositionof thecraneboomrelative to themachine(Cranab2013b).Asindicatedintheanalyses,manysensingmethodscouldpotentiallybeusedbutarelessrobust or well suited to heavy duty forest work. The ongoingdevelopmentofrecentlyintroducedproductsforpositioningtheharvesterhead(i.e.boomtip)willenabletherealizationofmostofthebenefitsdiscussedherein if end users wish to do so. However, the realiza-tionofsomebenefits(particularlyTimbertraceabilityandimprovedclassificationofproductproperties)willrequirethedevelopmentofcostefficientmethodsforlinkinginformationaboutindividuallogsfromdiffer-ent stages in the forest value chain.Toaccuratelydeterminetheharvesterhead'sposi-
tion,wechosetofocusonthepositioningofthehar-vester head relative to the forest machine. However, during the analysis it was noted that the interactions betweencertainmethodsofferedopportunitiestosi-multaneouslyestimatelocalandglobalpositioning.Basedonthesefindings,webelievethatcombinedlo-calandglobalapproacheswillultimatelybeadoptedtoimprovetheaccuracyofboth.However,someofthebenefitsconsideredinthisworkwillnotgainfromhighglobalaccuracy.Forinstance,thebenefitthathasthe most stringent requirements in terms of relative accuracy,i.e.machine(semi)automation,iscomplete-lyindependentofthemachine'sglobalposition.Incontrast,ecologicalmappingbenefitsrequireglobalaccuracy. However, the required level of local accu-racy(i.e.accuracyindeterminingthehead'spositionrelative to themachine) for ecologicalmapping ismuch lower than that for (semi) automation. In the end,highaccuracyinbothglobalandlocalpositioningwill always be useful, as long as it does not come at toohighaprice.
Naturally, this kind of study cannot cover all of the potentialbenefitsthatmayberealizedbyaccuratelymeasuringthepositionoftheharvesterheadorafor-estmachine'sboomtip;similarly,itwouldbeimpos-sible to discuss all of the methods that could be used to acquire such data. Indeed, this overview is already
Fig. 7 Forwarder crane coordinate system and generalized joint coordinates
Fig. 8 Calculated boom tip movement patterns based on recordings of the joint angles and telescopic opening

O. Lindroos et al. Estimating the Position of the Harvester Head – a Key Step towards the Precision Forestry ... (147–164)
162 Croat. j. for. eng. 36(2015)2
lengthyenough.However,wehopethatbyhighlight-ingsomeofthesebenefitsandpromisingpositioningmethods, we will introduce a wider audience to the potentialofthisrecenttechnicaldevelopment.Infu-ture, we look forward to building on the results and ideaspresentedhereinbyexaminingnewsolutionsforrealizingsomeoftheprospectivebenefitsarisingfrom having detailed information on the location of the harvester head.
AcknowledgementsThisworkwasfundedbytheRoyalSwedishAcad-
emyofAgricultureandForestry(KSLA;H11-0085-MEK,H11-0085-GBN).WewouldliketothankSees-Editing Ltd for revising the English language.
8. ReferencesAlam,M.M.,Strandgard,M.N.,BrownM.W.,Fox,J.C.,2012:Improvingtheproductivityofmechanisedharvestingsys-temsusingremotesensing.AustralianForestry75(4):238–245.
Andersen,H.E.,Clarkin,T.,Winterberger,K., Strunk, J.,2009:Anaccuracyassessmentofpositionsobtainedusingsurveyandrecreationalgradeglobalpositioningsystemreceivers across a range of forest conditions within the Tan-anaValleyofinteriorAlaska.WesternJournalofAppliedForestry24(3):128–136.
Anon.,2010:StanForD2010–moderncommunicationwithforestmachines.Uppsala,Sweden,Skogforsk.16p.
Arii,K.,Caspersen,J.P.,Jones,T.A.,Thomas,S.C.,2008:Aselectionharvestingalgorithmforuseinspatiallyexplicitindividual based forest simulation models. Ecological mod-elling211(3):251–266.
Arshadi,M.,Backlund, I.,Geladi,P., Bergsten,U., 2013:ComparisonoffattyandresinacidcompositioninboreallodgepolepineandScotspineforbiorefineryapplications.IndustrialCropsandProducts49:535–541.
Athanasiadis,I.N.,Anastasiadou,D.,Koulinas,K.,Kiourtsis,F., 2013: Identifying Smart Solutions for Fighting Illegal Log-gingandTimberTrade.InEnvironmentalSoftwareSystems.FosteringInformationSharing,Springer,BerlinHeidelberg143–153p.
Barth,A.,Holmgren,J.,2013:Stemtaperestimatesbasedonairborne laser scanning and cut-to-length harvester meas-urementsforpre-harvestplanning.InternationalJournalofForestEngineering24(3):161–169.
Berg,S.,Bergström,D.Nordfjell,T.,2014:Simulatingcon-ventionalandintegratedstumpandroundwoodharvestingsystems:acomparisonofproductivityandcosts.Interna-tionalJournalofForestEngineering25(2):138–155.
Bollandsås,O.M.,Maltamo,M.,Gobakken,T.,Lien,V.,Naes-set,E.,2011:PredictionofTimberQualityParametersofFor-estStandsbyMeansofSmallFootprintAirborneLaserScan-ner Data. International Journal of Forest Engineering 22(1): 14–23.
Chunhan,L.,Yushin,C.,Gunhong,P.,Jaeheon,R.,Seung-Gweon,J.,Seokhyun,P.,Jae,W.P.,Hee,C.L.,Keum-Shik,H.,Man,H.L.,2004:Indoorpositioningsystembasedoninci-dentanglesofinfraredemittersIndustrialElectronicsSoci-ety. IECON, 30thAnnualConferenceofIEEE(Vol.3).
Cranab2013a:Cranab-Products-ForwarderCranes.Avail-ableat:http://www.cranab.info/www%5Ccranabcom.nsf/pages/ProductsForwarderCranes.
Cranab2013b:Cranabpresentsanentirelynewgenerationofcranes.Availableat:http://www.cranab.se/static/en/206/.
Davison,A.J.,Kita,N.,2002:ActiveVisualLocalizationforMultipleInspectionRobots.AdvancedRobotics16(3):281–295.
Dissanayake,M.W.M.G.,Newman,P.,Clark,S.,Durrant-Whyte,H.,Csorba,M.A.,2001:Solutiontothesimultaneouslocalizationandmapbuilding(SLAM)problem.IEEETrans.Robot.Autom.17(3):229–241.
Eriksson,D.,Lindberg,H.,Bergsten,U.,2006:Influenceofsilvicultural regime on wood structure characteristics and mechanicalpropertiesofclearwoodinPinus sylvestris. Silva Fennica40(4):743–762.
Eriksson,M.,Lindroos,O.,2014:Productivityofharvestersand forwarders inCTL operations inNorthern Swedenbasedonlargefollow-updatasets.InternationalJournalofForestEngineering25(3):179–200.
Fortin,M.,Delisle-Boulianne,S.,Pothier,D.,2013:Consider-ingspatialcorrelationsbetweenbinaryresponsevariablesinforestry:anexampleappliedtotreeharvestmodeling.ForestScience59(3):253–260.
Gellerstedt,S.,2002:Operationofthesingle-gripharvester:motor-sensory and cognitive work. International Journal of ForestEngineering13(2):35–47.
Hakli,J.,Jaakkola,K.,Pursula,P.,Huusko,M.,Nummila,K.,2010:UHFRFIDbasedtrackingoflogsintheforestindustry.IEEEInternationalConferenceonRFID.Orlando,FL,USA,14–16April,245–251.
Harter,A.,Hopper,A.,Steggles,P.,Ward,A.,Webster,P.,1999:TheAnatomyofaContextAwareApplication.InProc.5thACMMOBICOMConf.Seattle,WA.
Heidenhain,2013:MeasurementandControlTechnologyforDemandingPositioningTasks.Availableat:http://www.heidenhain.de/de_EN/home/.
Hellström,T.,Lärkeryd,P.,Nordfjell,T.,Ringdahl,O.,2009:Autonomous Forest Vehicles: Historic, envisioned, andstate-of-the-art. International Journal of Forest Engineering 20(1):31–38.

Estimating the Position of the Harvester Head – a Key Step towards the Precision Forestry ... (147–164) O. Lindroos et al.
Croat. j. for. eng. 36(2015)2 163
Hellström,T.,Ringdahl,O.,2009:Realtimepathplanningusingasimulator-in-the-loop.InternationalJournalofVehi-cleAutonomousSystems7(1/2):56–72.
Hellström,T.,Hohnloser,P.,Ringdahl,O.,2012:Treediam-eterestimationusinglaserscanner.TechnicalReportUMINF12.20,DepartmentofComputingScience,UmeåUniversity,Umeå,Sweden.
Holmgren,J.,Barth,A.,Larsson,H.,Olsson,H.,2012:Predic-tionofstemattributesbycombiningairbornelaserscanningandmeasurements fromharvesters. SilvaFennica 46(2):227–239.
Huang,S.,Wang,Z.,Dissanayake,G.,2008:Sparselocalsub-mapjoiningfilterforbuildinglarge-scalemaps.IEEETrans.Robot.24(5):1121–1130.
Hyyppa,J.,Hyyppa,H.,Leckie,D.,Gougeon,F.,Yu,X.,Mal-tamo,M.,2008:Reviewofmethodsofsmall-footprintair-bornelaserscanningforextractingforestinventorydatainborealforests.Int.J.RemoteSens.29(5):1339–1366.
Indexator,2013:Rotatorsandaccessories–Indexator.Avail-ableat:http://www.indexator.se/en/rotator_systems/rota-tors_and_accessories.
JohnDeere,2013:IntelligentBoomControl(IBC).Availableat:http://www.deere.co.uk/wps/dcom/en_GB/industry/for-estry/learn_more/ibc_en.page.
Jutila,J.,Kannas,K.,Visala,A.,2007:TreeMeasurementinForestby2DLaserScanning.InternationalSymposiumonComputational Intelligence inRoboticsandAutomation.IEEE,491–496.
KomatsuForest,2013:830.3–Sverige–KomatsuForest.Available at: http://www.komatsuforest.se/default.aspx?id=10876.
Lee,C.,Chang,Y.,Park,G,.Ryu,J.,Jeong,S.G.,Park,S.,Park,J.W.,Lee,H.C.,Hong,K.S.,Lee,M.H.,2004:Indoorposition-ingsystembasedonincidentanglesofinfraredemitters.Industrial Electronics Society. IECON 2004. 30thAnnualCon-ferenceofIEEE,vol.3:2218–2222.
Lindroos, O., 2012: Evaluation of technical and organiza-tionalapproachesfordirectlyloadinglogsinmechanizedCTLharvesting.ForestScience58(4):326–341.
Mettin,U.,LaHera,P.X.,Morales,D.O.,Shiriaev,A.S.,Frei-dovich,L.B.,Westerberg,S.,2009:Path-constrainedtrajec-toryplanningandtime-independentmotioncontrol:Ap-plication to a forestry crane. In Proceedings of 14th InternationalConferenceonAdvancedRobotics(ICAR).
Miettinen,M.,Ohman,M.,Visala,A.,Forsman,P.,2007:Si-multaneousLocalizationandMappingforForestHarvest-ers.InProceedingsofthe2007IEEEInternationalConfer-enceonRoboticsandAutomation.10–14April,Roma,Italy:517–522.
Milne,B.,Chen,X.Q.,Hann,C.E.,Parker,R.,2013:Robotisa-tionofforestryharvestinginNewZealand–Anoverview.The 10thIEEEInternationalConferenceonControlandAu-tomation(ICCA),12-14Jun,Hangzhou,China,1609–1614.
Möller,J.J.,Bhuiyan,N.,Hannrup,B.,2012:Monitoringofthinningusingharvesterdata.Resultat1,Uppsala,Sweden,Skogforsk.
Murphy,G.,2014:Prioritylistbuckingonamechanizedhar-vesterconsideringexternalpropertiesandstiffnessofDoug-las-fir. International JournalofForestEngineering25(3):214–221.
Murphy,G.,Clark,J.A.,Pilkerton,S.,2012:CurrentandPo-tential Tagging and Tracking Systems for Logs Harvested fromPacificNorthwestForests.WesternJournalofAppliedForestry27(2):84–91.
Naesset,E.,Jonmeister,T.,2002:AssessingpointaccuracyofDGPSunderforestcanopybeforedataacquisition,inthefieldandafterpostprocessing.ScandinavianJournalofFor-estResearch17(4):351–358.
Næsset,E.,Gobakken,T.,Holmgren,J.,Hyyppä,H.,Hyyp-pä,J.,Maltamo,M.,Nilsson,M.,Olsson,H.K.,Persson,A.S.,Söderman,U.,2004:Laserscanningofforestresources:Thenordicexperience.Scand.J.For.Res.19(6):482–499.
Nordström,M.,Wilhelmsson,L.,Arlinger, J.,Möller, J.J.,2010:Harvesterdatacanprovideimportantadvanceinfor-mationtoendusers.Resultat21,Uppsala,Sweden,Skog-forsk.
OrtizMorales,D.,Westerberg,S.,LaHera,P.X.,Mettin,U.,Freidovich,L.,Shiriaev,A.S.,2014:IncreasingtheLevelofAutomation in theForestryLoggingProcesswithCraneTrajectoryPlanningandControl.JournalofFieldRobotics,31(3):343–363.doi:10.1002/rob.21496.
OrtizMorales,D.,LaHera,P.,Westerberg,S.,Mettin,U.,Freidovich,L.,Shiriaev,A.,2015:Path-constrainedmotionanalysis.Analgorithmtounderstandhumanperformanceonhydraulicmanipulators.IEEETransactionsJournalonHuman-MachineSystems45(2):187–199.
Ovaskainen,H.,Heikkilä,M.,2007:Visuospatialcognitiveabilitiesincut-to-lengthsingle-griptimberharvesterwork.InternationalJournalofIndustrialErgonomics37(9):771–780.
Persson,1977:QualitydevelopmentinyoungspacingtrialswithScotspine.SwedishUniversityofAgriculturalScience,DepartmentofForestYieldResearch,Report45,152p.
Purfürst,T.,Lindroos,O.,2011:Thelong-termproductivity’scorrelationwithsubjectiveandobjectiveratingsofharvesteroperators.Croatian Journal of Forest Engineering 32(2):509–519.
Ringdahl,O.,2011:AutomationinForestry–DevelopmentofUnmannedForwarders.PhDthesis,DepartmentofCom-putingScience,UmeåUniversity.
Ringdahl,O.,Hohnloser,P.,Hellström,T.,Holmgren, J.,Lindroos,O.,2013:EnhancedAlgorithms forEstimatingTreeTrunkDiameterUsing2DLaserScanner.RemoteSens-ing5(10):4839–4856.
Rodríguez-Pérez,J.R.,Álvarez,M.,Sanz-Ablanedo,E.,2007:Assessmentoflow-costGPSreceiveraccuracyandprecision

O. Lindroos et al. Estimating the Position of the Harvester Head – a Key Step towards the Precision Forestry ... (147–164)
164 Croat. j. for. eng. 36(2015)2
in forest environments. Journal of Surveying Engineering 133(4):159–167.Rossmann,J.,Krahwinkler,P.,Schlette,C.,2010:Navigationofmobilerobotsinnaturalenvironments:Usingsensorfu-sioninforestry.J.Syst.Cybern.Inform.8(3):67–71.Rossmann,J.,Schluse,M.,Waspe,R.,Moshammer,R.,2011:Simulation in the woods: from remote sensing based data acquisitionandprocessingtovarioussimulationapplica-tions.In:Proceedingsofthe2011WinterSimulationConfer-ence»SimulationforaSustainableWorld«editedbyS.Jain,R.R.Creasey,J.Himmelspach,K.P.White,andM.Fu,De-cember11–14,Phoenix,Arizona,984–996.Rossmann,J.,Schluse,M.,Schlette,C.,Buecken,A.,Krah-winkler,P.,Emde,M.,2009:Realizationofahighlyaccuratemobilerobotsystemformultipurposeprecisionforestryapplications.The14thInternationalConferenceonAdvancedRobotics,22–26June,Munich,1–6.Seidel,F.,Fripp,E.,Adams,A.,Denty,I.,2012:TrackingSus-tainability.ReviewofElectronicandSemi-ElectronicTimberTracking Technologies. ITTO Technical Series TS-40. The InternationalTropicalTimberOrganization(ITTO),Yoko-hama,Japan.62p.Shiriaev,A.,Freidovich,L.,Manchester,I.,Mettin,U.,LaHera,P.,Westerberg,S.,2008:StatusofSmartCraneLabProject:ModelingandControlforaForwarderCrane;Tech-nicalReport;DepartmentofAppliedPhysicsandElectron-ics,UmeåUniversity:Umeå,Sweden.Smith,A.,Balakrishnan,H.,Goraczko,M.,Priyantha,N.B.,2004:TrackingMovingDeviceswiththeCricketLocationSystem,inProc.ofThe2ndInt.Conf.onMobileSystems,ApplicationsandServices.
Stendahl,J.,Dahlin,B.,2002:Possibilitiesforharvester-basedforest inventory in thinnings. Scandinavian Journal of Forest Research17(6):548–555.Thorpe,H.C.,Vanderwel,M.C.,Fuller,M.M.,Thomas,S.C.,Caspersen,J.P.,2010:Modellingstanddevelopmentafterpartial harvests:An empirically based, spatially explicitanalysis for lowlandblack spruce.EcologicalModelling221(2):256–267.Yang,K.C.,2002:Impactofspacingonjuvenilewoodandmaturewoodpropertiesofwhitespruce(Picea glauca). Tai-wanJournalofForestScience17(1):13–29.Zheng,Y.,Liu,J.,Wang,D.,Yang,R.,2012:Laserscanningmeasurementsontreesforloggingharvestingoperations.Sensors12(7):9273–9285.Wang,Z.,Huang,S.,Dissanayake,G.,2005:D-SLAM:De-coupledlocalizationandmappingforautonomousrobots.InProceedingsoftheInternationalSymposiumofRoboticsResearch,ISRR05,SanFrancisco,CA,USA,12–15October(Vol.26):203–213.Westerberg,S.,2014:Semi-automatingforestmachines.Mo-tionplanning,systemintegrationandHuman-Machinein-teractions.PhDthesis,Dep.AppliedPhysicsandElectronics,UmeåUniversity,Sweden.Wiklund,U.,Andersson,U.,Hyyppä,K.,1988:AGVnaviga-tionbyanglemeasurements.Proc.6thint.Conf.AutomatedGuidedVehicleSystem,Brussels,October,199–212.Öhman,M.,Miettinen,M.,Kannas,K.,Jutila,J.,Visala,A.,Forsman,P.,2008:TreeMeasurementandSimultaneousLo-calizationandMappingSystemforForestHarvesters.InLaugier,C.andSiegwart,R.,FieldandServiceRobotics.Springer,BerlinHeidelberg,369–378.
Received:September3,2014 Accepted:January9,2015
Authors’address:Assoc.Prof.OlaLindroos,PhD.* e-mail: [email protected] PedroLaHera,PhD. e-mail:[email protected] DepartmentofForestBiomaterialsandTechnology SwedishUniversityofAgriculturalSciences SE-90183UmeåSWEDENOlaRingdahl,PhD. e-mail: [email protected] PeterHohnloser e-mail:[email protected] Assoc.Prof.ThomasHellström,PhD. e-mail: [email protected] DepartmentofComputingScience UmeåUniversity SE-90187Umeå SWEDEN*Correspondingauthor