Embed Size (px)
Citation preview

Calhoun: The NPS Institutional Archive
Theses and Dissertations Thesis Collection
1984-09
Equilibrium solutions, stabilities and dynamics of
Lanchester's equations with optimization of initial
force commitments.
Ang, Bing Ning
Monterey, California. Naval Postgraduate School
http://hdl.handle.net/10945/19300


l [ library
naval; te school
MONTE FORNIA 93943







NAVAL POSTGRADUATE SCHOOL
Monterey, California
THESISEQUILIBRIUMDYNAMICS OF
OPTIMIZATION
SOLUTIONS,LANCHESTEROF INITIAL
STABILITIES AND'S EQUATIONS WITHFORCE COMMITMENTS
by
Ang Bing Ning
September 1984
Thesis » Advisor: Paul H . Moose
Approved for public release; distribution unlimited
T221693


UNCLASSIFIEDSECURITY CLASSIFICATION OF THIS PAGE (Whan Data Entered)
REPORT DOCUMENTATION PAGE READ INSTRUCTIONSBEFORE COMPLETING FORM
1. REPORT NUMBER 2. GOVT ACCESSION NO. 3. RECIPIENT'S CATALOG DUMBER
4. TITLE (and Subtitle)
Equilibrium Solutions, Stabilities and
Dynamics of Lanchester's Equations withOptimization of Initial Force Commitments
5. TYPE OF REPORT 4 PERIOD COVERED
Master's thesis;September 1984
6. PERFORMING ORG. REPORT NUMBER
7. AUTHORfaj
Ang Bing Ning
8. CONTRACT OR GRANT NUMBERf*;
9. PERFORMING ORGANIZATION NAME AND ADDRESS
Naval Postgraduate SchoolMonterey, California 93943
10. PROGRAM ELEMENT. PROJECT, TASKAREA A WORK UNIT NUMBERS
i
i
1
11. CONTROLLING OFFICE NAME AND ADDRESS
Naval Postgraduate SchoolMonterey, California 93943
12. REPORT DATE }
September 198413. NUMBER OF PAGES
12814. MONITORING AGENCY NAME ft ADDRESS^// different from Controlling Office) 15. SECURITY CLASS, (of thia report)
I
Unclassified15a. DECLASSIFICATION/ DOWNGRADING
SCHEDULE1
16. DISTRIBUTION STATEMENT (of this Report)
Approved for public release; distribution unlimited
'7. DISTRIBUTION STATEMENT (of the abstract entered In Block 20, 11 different from Report)
18. SUPPLEMENTARY NOTES
19. KEY WORDS (Continue on reverse aide if neceasary and identify by block number)
Lanchester's Equations Domains of AttractionsEquilibrium Solutions Initial Force CommitmentsStabilities
20. ABSTRACT (Continue on reverse aide if necessary and identify by block number)
Generalised Lanchester-type differential equations are used to studycombat processes. This system of non- linear equations has multipleequilibrium solutions which can be determined by a numerical techniquecalled the Continuation Method. Useful properties pertaining to neighbor-hood stability are derived by considering the lowest -dimensional (1*1)
problem. A new set of parameters based on the system asymptotes is definedand used to characterize stabilities. System dynamics are investigated
DDl JAN 73 1473 EDITION OF 1 NOV 65 IS OBSOLETE
5 N 0102- LF- 014- 6601 1
UNCLASSIFIEDSECURITY CLASSIFICATION OF THIS PAGE (When Data Bntarad)

UNCLASSIFIEDSECURITY CLASSIFICATION OF THIS PAGE fWh»n Datm Bnfrmd)
#20 - ABSTRACT - (CONTINUED)
using phase trajectories which are found to depend on the domains ofattraction and stabilities of surrounding equilibria. The effect ofvarying initial force levels (X,Y) is studied by calculating an objectivefunction which is the difference of the losses at the end of a multistagebattle simulation. Based on the minimax theorem, a set of mixedstrategies for (X,Y) can be found. For highly unstable warfare withlarge war resources, instability can be used to influence battle outcome,
S<N 0102- LF- 014-6601
UNCLASSIFIEDSECURITY CLASSIFICATION OF THIS PAGEfWh»n Dmtm Bnftmd)

Approved for public release; distribution unlimited
Equilibrium Solutions, Stabilities amdDynamics of Lanchester's Equations withOptimization of Initial Force Commitments
by
Ang Biug NingCaptain, Republic of Singapore Navy
B. SC. (Honors) , university of Singapore, 1979
Submitted in partial fulfillment of therequirements for the degree of
MASTER OF SCIENCE IN ELECTRICAL ENGINEERING
from the
NAVAI POSTGRADUATE SCHOOLSeptember 1984

MONTEREY.CAUFOKN
ABSIFACT
Generalized Lanchester- type differential equations are
used to study combat processes. This system of non-linear
equations has multiple equilibrium solutions which can be
determined by a numerical technique called the Continuation
Method. Useful properties pertaining to neighborhood
stability are derived by considering the lowest-dimensional
(1*1) problem. A new set of parameters based on the system
asymptotes is defined and used to characterize stability.
System dynamics are investigated using phase trajectories
which are found to depend on the domains of attraction and
stabilities of surrounding equilibria. The effect of varying
initial force levels (X,Y) is studied by calculating an
objective function which is the difference of the losses at
the end of a multistage battle simulation. Based on the
minimax theorem, a set of mixed strategies for (X,Y) can be
found. For highly unstable warfare with large war resources,
instability can be used to influence battle outcome.

DUDLEY KIVOX LIBRARVN,5 POSTGRADUATE SCHnniTABLE OF CONTENTS MONTEREY,
CALIFORNIA
S
3
L
I. INTRODUCTION 12
II. LANCASTER'S EQUATION 16
A. EACKGROUND 16
B. OPTIMUM FORCE DISTRIBUTION 17
C. NEIGHBORHOOD STABILITY 18
III. MULTIDIMENSIONAL (N* N) SYSTEM 21
A. NATURE OF N*N PROBLEM 21
1. Existence of Multiple Equilibria 21
2. Stability and Domains of Attraction ... 24
B. FINDING TBE EQUI1IBRIUM SOLUTIONS 26
1. Continuation Method 27
2. Algorithm to Obtain 2*2 Equilibrium
Problem 29
3. Example and Results 33
IV. PROPERTIES OF THE 1*1 SYSTEM 40
A. SYSTEM ASYMPTOTES AND EQUILIBRIUM POINTS ... 40
1. Stability Criteria 41
2. Stability and Asymptotes 43
B. SYSTEM DYNAMICS 48
1. Trajectories 49
2. Boundaries of Domains of Attraction ... 52
3. Boundary Curve between Two Hyperbolas . . 54
4. Summary of the 1*1 Problem 55
V. SIRATEGY FOR INITIAL FORCE COMMITMENT 57
A. PROELEM STATEMENT AND APPROACH 57
B. MULTISTAGE BATTLE 59

U Stage 1 59
2. Stage 2 60
3. Stage 3 62
C. MIXED STRATEGIES 62
D. EXAMPLE USING KOREAN WAR DATA 69
1. Results and Discussions 69
VI. CONCLUSIONS AND RECOMMENDATIONS 75
A. CONCLUSIONS 75
B. RECOMMENDATIONS 77
1. Transformation of N*N Problem into the
1*1 Problem 77
2. Time Variable Replenishment
Coefficients 78
APPENDIX A: SOLVING FOR OPTIMUM VECTORS X AND Y .... 79
APPENDIX B: NUMBER CF EQUILIBRIUM SOLUTIONS OF THE
N*N PROBLEM 84
1. 2*2 Problem 84
2. 3*3 problem 85
3. Extension to N*N Problem 86
4. Degeneracies 88
APPENDIX C: PROGRAM LISTING FOR SOLVING 2*2 SYSTEM
USING CONTINUATION 89
APPENDIX D: DERIVATIONS OF THE RELATIONS BETWEEN ex
,£y AND STABILITY 97
1. Neutral Stability 97
2. Intersections in First and Third
Quadrant 98
3. Two Equilibria in the Third Quadrant . . 103
4. Repeated Equilibria 103
APPENDIX E: RELATION BETWEEN STABILITY AND £ x , £y
PLANE: VERIFICATIONS 105

1. Procedure 106
2. Results 106
APPENDIX F: PROGRAM TO PLOT TRAJECTORIES IN 1*1
SYSTEMS 108
APPENDIX G: PROGRAM TO PLOT BOUNDARY CURVE 111
APPENDIX H: PROGRAM 10 OBTAIN PAYOFF MATRIX AND
OPTIMUM MIXED STRATEGIES 114
APPENDIX I: TRANSFORMING MIXED STRATEGY PROBLEM INTO
LINEAR PROGRAMMING 122
APPENDIX J: KOREAN EAR BACKGROUND DATA 125
LIST OF REFERENCES 127
INITIAL DISTRIBUTION LIST 128

LIST OF TABLES
I. Computed Equilibria 39
II. Effect of Different Perturbations on the
Payoff 71
III. Payoff Matrix and Mixed Strategies for Korean
War 73
IV. Effect of Operating at Non-eguilibrium Points . . 74
V. Trivial Solution for 2*2 Problem 85
VI. Trivial solution for 3*3 problem 86
VII. Results of Experimental Verification 107
8

LIST OF FIGURES
3.1 Equilibrium Points at Hyperbolic
Intersections 22
Infinite Number of Equilibria 23
Repeated Equilibria 24
Domains of Attraction 25
Integration Eath using Predictor-Corrector ... 32
Curve Passing through Singularity 34
Flowchart for Algorithm to Find 2*2
Equilibria 35
z i (t) Versus t for Values of t Close to Zero . . 36
z i (t) Versus t during Continuation Process ... 37
System Asymptotes 42
Types of Equilibria 44
The £x, £yPlane 47
Analytical nethod of predicting trajectories . . 50
Computer Plot of Trajectories 51
Trajectories when Hyperbolas do not
Intersect 52
Boundary Curve through an Unstable Point .... 53
Existence of Boundary Between Two Hyperbolas . . 54
Exact Boundary Curve Between Two Hyperbolas . . 55
Replenishment Versus Time 58
Losses at Stage 1 61
Trajectories and Hyperbolic Intersection
During Stage 2 63
Losses at Stage 2 64
Trajectories and Hyperbolic Intersection
During Stage 3 65
•a 2
3. 3
•aw m 4
3. 5
3. 6
3. 7
3. 8
3. 9
4, 1
4. 2
4. 3
4. 4
4. 5
4, 6
4. 7
4. 8
4, 9
5. 1
5, 2
5. 3
5. 4
5. 5

w «,6
5. 7
5.,8
5.,9
5.,10
Losses at Stage 3 66
Payoff Matrix 67
Obtaining Pure Strategy from Mixed
Strategies 69
Trajectory for Korean War 71
Initial Operating Points at Non-equilibrium
Points 74
D.1 Effect of Varying xe2
and y e?on e - £
Plane 99
D.2 Boundary line of Stability on e , z Plane . . 100j J x yD.3 Regions in r , z Plane 102
X VD.4 Two equilibria in the Third Quadrant 103
E.1 Experimental Verifications 105
10

ACKNOWLEDGEMENT
I would like to thank my thesis advisor, Professor Paul
Moose for his patience in guiding and assisting me in this
thesis. I also wish to thank Professor John Wozencraft who
has done much more than just being a second reader in his
effort to help me. Per all the support, encouragement and
patience in typing this manuscript, I am grateful to my
wife.
11


I- INTRODUCTION
Since World War II, comtat modeling, simulation and
analysis have been the subjects of considerable research.
The objectives of this research are to support defense deci-
sion making and doctrinal developments during peace and war
time. During peacetime defense-planners are primarily
concerned with weapon procurement, development, acquisition,
organisation and structuring. During war time it is
believed that a better understanding of the quantitative
aspects cf attrition can help commanders make better command
and control decisions.
Ccmbat processes involve complicated interactions
between opposing forces. These interactions are often influ-
enced by many external factors such as environment, troop
quality and tactics. There are different types of ccmbat
models such as war games, simulations and analytical models.
A fundamental requirement for a good model is that it must
te of a fairly high degree of operational realism, since
otherwise they would not be credible to military planners.
Cn the other hand, excessively complicated models can make
the mathematics too difficult tc handle.
In this thesis, a generalised Lanchester [Ref. 1] model
which contains area-fire, aimed-fire, self-attrition and
replenishment coefficients is used. It consists of a system
of 2N bilinear eguations and belongs to the general category
of analytical models. The model is rich enough to treat
modern combined-arms operations involving heterogeneous
forces. It is also possible to extend the model to analyse
operations cn two or more fronts.
Among the many important issues that could be analysed
using this model, the problem of optimum force iistributi on
12

had teen studied by Eozencraft and Moose (1983). In their
paper [Eef. 2], an objective function was chosen as the
difference of the aggregate attrition rates. It was shewn
that the optimization problem is mathematically equivalent
to a matrix game. Hence, the model has a saddle-point solu-
tion with corresponding optimum force distribution vectors
x and y for Blue and Crange forces respectively.
In addition, the neighborhood stability of the model at
the operating point (x* and y *) was also investigated. By
defining two parameters, K1 and K2 which are obtained by
considering small perturbations around the operating points,
a great deal could be learned about stability.
Motivated by these results, much of the work done during
the initial part of this thesis was directed at studying the
effect of stability en battle outcome. The ultimate question
is, how do we exploit the knowledge of stability of an oper-
ating point to influence battle outcome? Before this ques-
tion can be answered, it appears that there is a need for a
tetter understanding of the equilibrium points. Chapter III
is devoted to finding and understanding the equilibrium
solutions and their stability behavior. Like many other
nonlinear system of eguations, the Lanchester's model
adopted here has multiple equilibria. Stability analysis
[fief. 3] of a non-linear system is usually done by methods
which do net require prior knowledge of the equilibrium
solutions. One example of such a method is the Liapunov
method [Eef. 4 ]• If, by some realizable means, the equilib-
rium solutions can be found explicitly then there is no need
to rely on these indirect methods which are often difficult
to iiplement.
One of the reasons for resorting to the Liapunov method
is the difficulty in obtaining equilibrium solutions of a
non-linear system. Many numerical methods are unsuitable for
reasons such as difficulty in obtaining good initial
13

guesses, non-convergence, ill-conditioning and so forth.
Fortunately, a powerful numerical technique called the
Continuation Method can be applied for our purpose. This
method not only finds all the solutions (i.e. it is exhaus-
tive) , it dees not even require initial guesses.
In order to gain a firm grasp on the dynamics of the
system surrounding the equilibria, it is helpful to tempo-
rarily fecus attention on the homogeneous (1*1) system. In
spite of its simplicity, the 1*1 system is not devoid of the
essential characteristics of the N*N system. In fact, the
1*1 model is sufficiently sophisticated for certain analyses
in which the opposing forces can be assumed to be homoge-
neous. As we proceed through Chapter IV, it will become
clear that much insight into the stability and system
dynamics could be gained by merely considering the 1*1
system. Part of the chapter is devoted to the derivations
and interpretations cf the relations between system asymp-
totes, locations of equilibrium points and stability. The
dynamics of the system are studied using the idea of phase
trajectories. These trajectories represent changes cf force
levels with time and they will be shown to depend not only
on the stabilities of equilibrium points but also on the
domains of attraction.
Chapter V concentrates on battle outcome which is ere of
the main issues facing a commander. It encompasses many
issues such as, (1) Who will win and by what margin? (2)
What is the length of battle? (3) How do initial deployments
affect battle outcome? (U) Which parameters affect battle
outcome most? But we will only address the two following
subjects :
(a) The effect cf stability on battle outcome;
(b) The effect cf varying X and Y, the initial force
levels.
14

The tasic approach is to define a multistage battle with
a predetermined condition for termination. The resultant
payoff matrix can th€n be used to obtain the optimum set of
mixed strategies. An example, which employs KOREAN WAR data,
is presented for the purpose of illustrations and
discussions.
The essence of tie findings are:
1. Unstable operating conditions can be exploited to
influence battle outcome, especially when total war
resources are large. The effect on battle outcome is
mere pronounced for highly unstable warfare;
2. Initial force deployment can be optimize! in accor-
dance with a set of mixed strategies.
We conclude this introduction by stating two of the
outstanding issues. The first question is the extent to
which cne can replace the N*N problem by the 1*1 problem.
The motivation to find an equivalent 1*1 system stems from
(1) our better understanding of the 1*1 system, (2) ease of
presentirg and visualizing two-dimensional pictures, and (3)
savings in computational effort.
The second question concerns replenishment rates. In
this thesis, the replenishment terms used in the model have
teen constant. It is therefore reasonable to ask, how to
modify replenishment terms to reflect a higher degree of
operational realism? In other words, are there more suit-
able time-dependent replenishment rates r(t)?
15

II. IANCHESTEB'S ELATION
A. EACKGRCOND
Ccmbat models have been studied as a form of decision
aid for defense planting. A wide variety of defense plan-
ning problems, ranging from force structuring and weapon
selection to rates of deployment in battles have been anal-
ysed using combat models. There are many different types of
models. They can be loosely categorized as either war games,
simulations or analytical models. Discussions on the
nature, advantages and shortcomings of each can be found in
[Ref. 5].
Cur attention will be focused on a generalized
lanchester's [Ref. 5] model, which is an analytical model.
It consists basically of a system of ordinary differential
equations describing the mutual interactions -between
opposing combat forces. Although earlier works in
Lanchester's model [Ref. 6] employed only a few terms in the
equations, modern high speed computers enable more general-
ised, realistic and responsive versions to be used.
Consider a battlefield with opposing forces, Elue and
Crange, denoted by { x. } and {y.} respectively. The
subscripts i, j refer to the type of forces such as
infantry, tanks, artillery, etc. A generalised version of
lanchester's model given by
x. = -x.u. - x . y*a . .y- -/ b . .y .+ r\-
i ii ±Z-j 133 '-—'i] 3 1
y . = - v . y . - y . > x . c . . - > x . d . . + s .
i i
(eqn 2.1)
16

i = 1 2 I
i = 1 ° T
where
u. , v. = self -attrition coefficients
a«• , c. . = area-fire attrition coefficients
b.. , d.. = aimed-fire attrition coefficients
r. , s. = replenishment coefficients1
J
is adopted in this thesis.
Note that in general I ? J, implying that the force
compositions may be different for the two sides. It is also
possible to extend the above formulation to a scenerio
involving more than cne battlefield.
In the next two sections, the highlights of the work
done by Wozencraft and Moose (1983) are given. The work done
in this thesis is a continuation and extention of their
work. The detailed derivations of the results obtained by
them can be found in [ Ref . 2}, and hence are not included
here.
B. OPTIMUM FOECE DISIRIBUTION
The guestion of optimum force distribution arises in
combined-arms operations. The problem is fundamentally
this: Given aggregated forces X, Y, how should one
distribute them among the different types xi
and y. , i =
1,2...,!, j = 1,2.. .,J? Since loss rate is one of the
fundamental concepts in combat modeling, it is reasonable to
choose this measure as a starting point. The objective
function was chosen to be
17

h *^>i - v -B^j - sj ( e q n 2 . 2 )
Per this choice of M, it was shown that there exists
optimum force distribution (row and column) vectors x* and
y* such that for any ether vectors x and y
~ * * * •*
xAy < M < x Ay (eqn 2.3)
where
M = x Ay
A = matrix determined by attrition coefficients andthe aggregate force levels X and Y
The resemblance of this result to the Mini max theorem
[Ref. 7 ] in matrix games is very striking. Indeed, this
result holds precisely because H can be written in a form
mathematically equivalent tea matrix game. Consequently,
it is net surprising that one can solve for the optimum
vector x* and y* by means of a Linear Program. An interac-
tive program to solve a 2*2 program is given in appendix A.
C. NEIGEBCBHOOD STAEILITY
Equilibrium conditions can be achieved if the replenish-
ment rates are chosen to make
x. = y . =
i = 1,2. .. ,1j = 1,2. ,.,J
18

at x = x* and y = y* . Following the usual approach in the
analysis of nonlinear system stability, equation 2.1 can
then be transformed into a system of linear equations.
6x
6y= -C
5x
6yc =
A
AA
~
B
AD C
C is called the conflict matrix and its elements are deter-
mined by the attrition coefficients and the optimum vectorsA A
x* and y* . For the system of equations 2.1, A and C are
diagonal matrices. It was shown that two parameters k 1# k 2
partially characterize the stability of the system, k^ and k~
turn out to be the column sums of the left and right side of
the matrix
/\ /\
-A B
S\ /\
D -C -
» m
Eenoting the elements of the submatrices A, B, C, D, by ai
.
,
b]_j , Cjj and d1;L
respectively, k x and k2
can be written as
k, = - a .. XV11 iL; li
A * >/N
k = -c . . +/ b, •
2 JJ Z^ lj
independent of the columns i, j. Furthermore, it was shown
that the following relation holds
6X - kx6X = 6Y - k 6Y
19

where
i 7J
It was found that the eguilibrium point (x*, y* ) is
stable if k± and k2
are negative. If k-^ and k2
are positive,
then the system is 'unstable'. 1 Furthermore, values cf k±
and k2
and hence the stability of the operating point was
found to be affected by the aggregate X and Y.
l More generally, it can be_shown that k.-, < A <fc , whthe maximum eigenvalue of -C. ± u zis tne maximum eig<
20
ere AQ

III. BOITIDIttENSIONAL (N*N) SYSTEM
A. MATURE CF N*H PRCEIEM
The interesting results highlighted in the last chapter
provided motivation tc extend the body of knowledge. A study
of the effect on stability of battle outcome seems to have
important potentials for applications. Should a commander
strive to establish a stable operating point, and if so,
under what conditions? Also, what is the optimum initial
level of forces he should deploy and how many should he
maintain in reserve? To answer these questions, more knowl-
edge about the nature of these equilibria and their
stability behavior is required.
The next section outlines the kind of problems we would
expect to see and their potential complexity. It is
followed by. a section on finding the equilibrium solutions.
1 . Exi ste nce of gulti p le Eauilibria
An N*N system is in equilibrium if the replenishment
rates r. , s. are such that there is no change in the force
levels (x. = y. = 0) . The system of equations becomes
= -x.u. - x.Va.-y. - Vb..y. + r.
J J
= - v • y • - y - Vx c - . - Vx . d . + s -
i, j = 1 , 2 , . . . , N
(eqn 3.1)
21

where, for simplicity, i and j are each assumed tc have N
types cf forces.
A 2N-tuple vector, z - (x, y) which satisfies equa-
tion 3.1 is an equilibrium solution. Like many nonlinear
systems cf equations, equations 3.1 have more than one equi-
librium point. Geometrically, these equilibrium points are
at the intersections of a set of hypersurfaces in the
2N- dimensional space. To help in visualizing the geometry,
we can look at an example using a 1*1 system as shown in
figure 3.1. In this case the hypersurfaces simply reduce to
hyperbolic curves.
figure 3.1 Equilibrium Points at Hyperbolic Intersections.
The existence of multiple equilibria makes the anal-
ysis of the N*N problem very interesting but difficult. In
chapter IV, some illustrations en how the locations of these
equilihria affect phase trajectories will be presented.
A few other interesting questions arise spontane-
ously. For instance, how many of these equilibria are there
22

Figure 3.2 Infinite Number of Equilibria.
in an N*N problem? The answer to this question is not imme-
diately obvious just by looking at equation 3.1; however, it
emerges guite naturally when the Continuation Method is
considered in Section IIIB. It will be seen then that an
N*N system has, in general, Nk equilibrium points where
N
N, Til i N.i =
Two excepticns, or degenerate cases, have been
observed, namely: (1) when some or all of the hy persur faces
merge there are an infinite number of equilibrium points,
(see Figure 3.2), (2) when some or all of the hy persurfaces
intersect in such a manner that repeated equilibria are
formed, the number of distinct equilibria is less than Nk .
Figure 3.3 illustrates such a degeneracy.
23

Figure 3.3 Repeated Equilibria.
2 . Sta bil ity and Do mains of Attraction
Each equilibrium point in an N*N system may cr nay
not be stable depending on whether or not its equilibrium
point can be maintained. The property of neighborhood
stability is important because it has a strong influence on
the phase trajectories. Generally, if an operating point is
stable (the maximum eigenvalue is negative), then any
perturbation away from that point results in the system
returning to the same point. Conversely, perturbations
about an unstable point results in divergence from that
point.
The notion of domains of attraction is also critical
when determining phase trajectories. Any operating point
within this domain cr region will be "attracted" toward a
stable equilibrium point. In short, a domain of attraction
is a volume in the 2N-dimensional space surrounding a stable
equilibrium point. Figure 3.4 shows a typical domain in
which seme of the trajectories are shown converging to a
stable equilibrium point.
24

ty
/ boundary
X unstable point
stable point
Figure 3.4 Domains of Attraction.
Domains of attraction are separated by boundaries
which are invariant curves in 1*1 problems and invariant
hypersurfaces in N*N problems. A boundary surface may be
considered as an infinite number of invariant curves placed
side by side. A boundary curve is the locus of points that
approach an unstable point from both sides. The boundary
line can be obtained by backward integration (i.e. using
negative time in equation 2.1) starting just on either side
of an unstable point. The rationale behind this method is
that to approach an unstable equilibrium, a point must
remain exactly on the boundary. If this is not the case,
then the point will he attracted into the domains and move
25

toward a stable point or infinity. By performing a backward
integration, we are actually retracing the path taken by a
point which previously approached the unstable equilibrium
point. Ihis method requires knowledge of the unstable equi-
libria, but this is made feasible because the Continuation
Methods can be used tc find all equilibrium solutions.
E. IINDING THE EQUILIBRIUM SOLUTIONS
To obtain a set cf equilibrium solutions, one has to
solve equation 3.1, which can be written using a more
compact notation as
F(z) = (eqn 3. 2)
where
F(.) represents the right-hand side ofequation 3.1
z = (x,y)
= zero vector
It is well known that numerical techniques for solving
nonlinear equations are not always successful. Since equa-
tion 3.2 describes a bilinear system, one should expect to
face similiar difficulties when attempting to solve it
numerically.
Most numerical methods for root finding generally
require that a fairly good initial guess (z ) be known so
that some convergent iteration process
*n+l= S(V
26

brings the approximated root closer and closer to z the
desired equilibrium solution or root. In practice, the
following difficulties are often encountered :
(1) The convergence condition of the algorithm
must be ensured
;
(2) Finding an initial guess that is sufficiently
close to the correct solution is difficult,
especially for higher dimensions;
(3) Even if a good initial guess has been obtained,
the numerical process may still be plagued by
ill-conditioning, saddle points, etc.;
(4) Not all the solutions are guaranteed to be
found.
1 • Continua tion Metho d
Fortunately, the above problems are avoided if a
numerical method called the Continuation Method [Ref. 8] is
used. This technique, which is sometimes called The
Imbedding Method, has been successfully applied in many
fields. It introduces an artifical guide which will channel
the iterates toward a specific solution. Such a guiding
principle is actually a kDowledge of the existence of a
suitable curve connecting an initial point with the desired
solution.
Continuation Method has significant advantages over
other numerical techniques. Most importantly, a good initial
guess is not necessary and all the solutions can be
obtained.
a. Basic Theory
Given the problem F(z) = to solve, the first
step is to embed it into a homotopy or a parameterized set
of problems, H (z,t) . The requirements on H (z,t) are :
27

(1) H(z,1) = F 1 (z) = is the original problem
(2) H(z,0) = F (z) = has a trivial or easily
computed solution
For example, a homotopy could be :
H(z,t) = tF(z) (l-t)F (z) , te[0,l] (eqn.3.3)
Using the above parameterization, the simple
problem of F (z) = is deformed into the desired one, F x (z)
55 . This is done by calculating the solution tc the
deformed problem at each stage of the deformation. The exis-
tence of a continuous curve such that H(z(t), t) is a solu-
tion to H(.,.) = for all te [0, 1] is assumed.
i. Implementation
To actually carry out the above continuation
process one usually differentiates H(.,.) to form
H(z(t) ,t) = (eqn 3.4)
•
Using eguation 3.4, z can be written as a function of z and
t as given in equation 3.5. The function, h(.,.) is prefer-
ably a linear function that can be integrated numerically.
z = h(z, t) (eqn 3. 5)
Together with the initial condition z (0) = zQ ,
equation 3.5 is actually an initial value problem which can
be integrated numerically. The solution at t=1 is then the
solution to the original problem F(z) = 0.
28

2 . Algorithm to Obtai n 2*2 Ecjuil ibr iu m P roblem
A 2*2 Lanchester problem is first formulated into a
Continuation process. It is followed by a discussion on how
the accuracy of the method can be improved. The last part of
this subsection includes a note on the number of equilibrium
points in an N*N problem.
a. Formulation
For the 2*2 problem, F (z) =0 is explictly
zl (V a
llZ3+a
12z 4> * r
iW a21
z3+a
22z4 5
+ r2
Z3Cu
3+C
llZl+C
21Z2
3 * r3
Z4(U
4+C
12Z1+C
22Z2
5 * r4
-b..z.11 j>
b21
z3
-d11 1
12"!
u 12"4
b22
Z4
da 21"2
22^2
=
=
=
=
The hoiiotopy is formed by writing
Hx(z)
H2(z)
H3(z)
H4(z)
where
H1(z,0) + t ( r
1- b
11z3
- b12
z 4)
H2(z,0) + t Cr
2-b
21z5-b
22z4
)
H3(z,0) + t(r
3-d
11ir d
21z2 )
H4(z,0) + t (r
4-d
12z1-d
22z2
)
(eqn 3 . 6)
H2(z,0) =
H3(z,0) =
H4(z,0) =
z1(u
1+ an z
5+ a
12z4 )
z2(u
2+a
21z 5+ a
22z4
)
Z3(U
3+C
11Z1+C
21Z2
)
-Z/iC^.+c +C22
Z 2^=
29

Next, we differentiate equation 3.6 with respect to t and
put it in a matrix form
Az = B (eqn 3.7)
where
A =
VallVa12
Z4
cn z 3+dn t
an z 1+bn t a12
z1+b 12t
^lV^l* u3+CllVC
2122
c12
z4+d12t c
22z4+d22
t
u2+a2lVa
22Z4
a21
Z2+b
21t a
22Z2+b
22t
U4+C
12Z1+C
22Z2
z =Lzi>
z 2*zZ'
z4-*
B =
rr bll
Z 3" b 12Z4
r 2" b 21Z 3" b
22Z4
r 3" d llZl"
d21
Z2
r 4" d 12Zl"
d22
Z2
Equation 3-7 can now be integrated numerically using one of
the readily available integration routines.
We have assumed that the trivial solution to
H(z, 0) - has been previously found.
b. Improving Accuracy
Numerical integration of equation 3.7 inevitably
produces seme errors at each iteration. Since the
30

Continuation method relies on following curves to arrive at
the desired solution, it is esssential that each iterate
remains close to the actual curve. It is necessary to
include a way to correct the approximated position by means
cf a corrector step. The combination of integration and
correction is often called a "predictor-corrector step"
This process of prediction-correction is shewn
in Figure 3.5 where each integration error has been exagger-
ated for illustrative purposes. The algorithm tc be
presented later employs an IMSL routine called ZSCNT for the
predictor step. Other forms of curve following routine can
also be found in the literature, and are briefly mentioned
in [Eef- 8].
c. Trivial Solution
The trivial system H (z, 0) = was chosen to be
^(2,0) = -^1
( u1+ a
11z3+ a
12z 4^
= °
H (z,0) = -MVa 21z3+ a
22z4
) = ° ., R
.
( eqn ^ . b
)
H3(z,0) = "WcnVc 21
z2 ) = °
H4(z,0) = - z
4C u
4+c
1 2zi+c
22Z2
)= °
In non-degenerate cases, there are six solutions
corresponding to equation 3.8. The result is derived in
Appendix B which also deduces the number of trivial solu-
tions for an N*N problem to be
(eqn 3 . 9)
The method of obtaining the trivial solutions is given in
Appendix 3. Using a combinatorial identity, N, can be
written as
31

*z.
predictorpath
corrector
desiredsolution
)
theoreticalcurve
trivialsolution'
Figure 3.5 Integration Path using Predictor-Corrector.
N,
Each continuation process starts from a trivial
solution zQ
and follows a specific curve until it reaches
the equilibrium point. Con seguently, the number of equilib-
rium points will also be N k . As mentioned in section IIIA,
the two exceptions are situations involving infinitely-many
and repeated equilibria. Situations involving degeneracy
are discussed in Appendix B.
d. Algorithm
0) Singularity Treatment. In Continuation
Method algorithms [ Bef . 8], it is sometimes necessary to
give special treatment to cases in which the curves being
32

followed by the integration routine pass through a singu-
larity. Experimentally, it had been observed that in our
problem, the singularity took on the form shown in Figure
3.6. Corrective measures were necessary to ensure that upon
crossing the singularity, the large magnitude was preserved
but the sign was changed; otherwise the curve might termi-
nate at an eguilibriuir point which was not the intended one.
In the algorithm, the presence of the
singularity is detected by monitoring the rate of change of
the individual component z^ Once identified, this fast-
changing and large-magnitude component (zp )
is monitored at
each step t where = t n <...<... t, < t, , <...< t , = 1.* k k+1 endWhen z F is found not to cross the singularity and end up at
approximately -z F , the algorithm attempts to correct this
irregularity by artificially making z = -z before the next
predictor step commences.
(2 ) Flowchart. The flowchart for the algo-
rithm is given in figure 3.7. Only the major steps have been
shown. The program listing is given in Appendix C.
3 . Example an d Jesuits
Consider as an example a 2*2 problem with the
following attrition coefficients
A =1.0 0.3"
0.6 0.9C =
1,2
1.1
1.0
0.6
C =
15 0.1"
15 0.3D =
0.0 0.0
0.0 0.0
U = [0.3 0.3]V =
0.1
0.2
33

fZ:
correctcurve
incorrect
curve
\0
Figure 3.6 Curve Passing through Singularity.
Ihe trivial solutions are first computed and serve
as one of the inputs to the program. The program obtains the
values of z (t) and plots each component ( Zj_ (t) ) versus t.
In Figure 3.8, the plcts for t close to zero show one set
of curves for z ± (t) starting from their respective trivial
solutions. The curves of z^t) versus t for all the six
sets cf equilibrium solutions are shown in Figure 3.9.
A few interesting features of the continuation
process are worth noting. For example
• Each trivial solution leads to different eguilib-
riuir solution and the integration path is different
for each component.
All the curves are smooth one of the four curves
may pass through a singularity. ( see Figure 3.9 (c)
and (d) ) .
Table I summarizes the computed equilibrium solu-
tions. They are tabulated in the same order as the plots in
34

(Start)
Input A, E, C, D, 0, R,
TS , A, N, omax, z
Yes Print S Plot'/-
,rrio
predictor step : solve
Az = E ; uodate z., ,, =— — ' K+l
+ ^ AK "1C
T
(Stop)
corrector step : compute
corrected z K+ ,
^ i
Singularity treatment : detecti
fast-changing component (z_);
criterion : zv ., > omax ftI Min
K+l(z
K+1- z
R ) | for 10 TS
'
r
^^ 1S ZF \^
^-'''changing sign? If so,\\ No<c -^ *
'^\* (ZF
}K + 1
" ( " ZF^>-^ (ZF
} K+1 =" (Vk
^"\^ ^^ TS = 2...
TS
YesT1
'
- -«
Legend TSN
partition 0<t<l ; A = integration step;number of equations ; omax = a constant;trivial solution.
Figure 3.7 Flowchart for Algorithm to find 2-2 Equilibria
35

*2i
/Vt)
V2j0)
23(fj
•2,0)
O.I-*f
Figure 3.8 z^t) Versus t for Values of t Close to Zero.
Figure 3.9. To estimate the accuracies of the results, we
defined error as
ERROR V~z - 2 ~ 2
Fl * F
2+ F
3+
~2
where
Fi
~ F j_(z), z is the computed equilibrium
solution to F(z) =
Decreasing the integration step size in the
predictor and corrector routines may reduce the errors by a
small amount; but the increase in computational effort iray
not be justifiable. Conversely, it may be desirable to cut
down computing time. Currently, the algorithm performs one
corrector step for each predictor step. If two or more
36

tz
i
2.0
0.0/.& z
|
(0)«z2(0)=z
3(0) = z
4(0)
(a)1.0
t zi
35.0-
-65.0-
2,(0) = o*
//. ^ *,(0)»0^t%_-'r>'——
—
*——• — •— — • — •—
:
«2«—-33
(b) 1.0
->t
*
3.0 z4(0)=0
V
»\
Figure 3.9 Plots of z-(t) Versus t during Continuation Proces:
37

A*;
52.0
20.0
z,(P)"2
(d)10
-».t
30.0'LZ
i
V°)=°~- ""~"
7x^J(o)=o
45.0-
tr*-2=Ti^z,(:
6j»-.683
'CO) =--3 """""-..^
v.
"S.
>»
1—m
(e)10
40.0 ?2i
•45.0 •
z,(o)=. 37 ^^--'
f^-X^ V°>"--17
(f)
* t
Figure 3.9 (contd.)
38

TABLE I
Computed Equilibria for X. = 1.0, Y = 4.0
Trivial Solution Computed Ecu! lit riant Solution, z Error
(0, 0, (1.7755, 1.2906, 0.2- : 10" U
0,0) 1.0533,0. 3512
(0, -0.33,0, -0.33)
( 34 .8989 , -64 .2951,-0.1350 , -0 .2775 )
,.6no" 6
(0, -0.091,-0.5, )
(0 .6154 , . 3946,3.0769, 0.92 31)
, .
1-10" D
(-0.2, 0,0, -1.0)
(0.46- : 10" U, -0.3930,
-16.6400, 52.9920 )
. 2 2 no" 5
(-0.083, ,
-0.3, 0)
(-0.1357 , 0.0325,-44.5297, 28.6147)
0,,56-no"5
(-0.42, 0.37,0.25 , -0.17)
(-45.2284, 39.1604,-0 . 3497 , -0 .04485)
.23-10" 6
predictor steps are done for each corrector step, seme
computational effort 2 can be saved.
2 Saving in computational effort will be more significantwhen solving higher dimensional systems.
39

IV. PBCEERTIES OF THE 1*J[ SYSTEM
The 1*1 problem is the simplest case in our nodel. It is
nevertheless important for us to investigate and understand
its properties. Despite its relative simplicity, it is by no
means uninteresting. There exists many situations which can
te realistically and easily modeled by the 1*1 system. For
example, when the opposing forces can be considered as homo-
geneous, it is convenient to use the 1*1 model for analysis.
It is also useful for the analyses at the strategic level
when the forces and parameters can be aggregated. In many
instances, it seems to provide insight on how to approach
the N*N problem, which is much more difficult to visualize.
In fact, as the understanding of the 1*1 system increases,
there is a strong urge to try to represent the N*N problem
by an equivalent 1*1 problem. The equivalent representation
is not only attractive in terms of its simplicity but also
its economy in computational efforts.
The next section will focus on the relation between
system asymptotes and stability of the equilibria. By formu-
lating the problem quantitatively, we are able to arrive at
some useful properties. In Section IVB, the system dynamics
i.e. the changes in the force levels are analysed by consid-
ering the phase trajectories.
A. SYSTEM ASYMPTOTES AND EQOIIIBRIOM POINTS
For the 1*1 problem, the system reduces to
x = -x(u +ay) + r - by(eqn 4.1)
y = -y(v + cx) + s - dx
40

An equilibrium condition exists if r and s are chosen such
that x and y are both zero. In general, there will be two
equilibrium points corresponding to two locations where the
two hyperbolas intersect. The hyperbolas are described by
x =
y =
r - byu + ay
s - dx
(eqn 4.2)
v + ex
From equation 4. 2, one can easily deduce the fouc asymptotes
(two vertical and two horizontal) associated with the hyper-
bolas. Figure 4.1 shows a typical set of four asymptotes.
They always cross in the third guadrant of the x- y plane and
d° UP.* depend on the replenishment coefficients. The rela-
tive displacements between the two horizontal (and also
vertical) asymptotes depend only on the ratios of attrition
coefficients and not on the coefficients themselves. It
turns out that these properties of the system asymptotes
help to simplify the analysis considerably.
1 . Sta bility Criteria
Considering small perturbations about an eguilitrium
(x e #y e ) and linearizing the eguations, we have
Sx (u + ayJ (b + axJ
(d + cye
) (v + cxe )e J
5x
>y
The characteristic polynomial is simply
41

1 ' '
Ci a.
hy
4c
"T'TViLa
i;
Figure 4.1 System Asymptotes.
where
D(s) = Det [si - C] (eqn 4 . 3)
I = identity matrix
C = the 2*2 matrix in equation 4.3
Hence,
DCs) [s + Cu +ay^lfs + (v+cxe
) - |_Cb + axe
) Cd + cye )J
T Cu+aye
) + Cv+cxe
) s + [(u + aye
) Cv+cx e )
Cb + axe
) Cd + cye )J
s2
+
The conditions for (x e , y e ) to be a stable equilibrium,
i.e. for the roots of D(s) to be in the Left Half Plane
(LHP) are given by
42

(u + aye
) +(v + cxe
) >
(u + aye)(v + cx
e) - (b + ax
g) (d + cy
e) >
(eqn 4.4)
2- Stability and Asymptotes
Five different ways in which the hyperbolas can
intercept have been identified and their stabilities
accounted for. These five cases are shown in Figure 4.2 and
each case will be elaborated upon subsequently.
a. Definitions and Formulation
One of the most intriguing facets of the 1*1
problem is the connection between the asymptotes and the
stability cf the resulting equilibria. We begin the quanti-
tative treatment by first defining the following ratios:
n 4 H n £ 1la' 2 c
u £ b u £ I1 a 2 c
The four asymptotes are x =-)~1
:L# x = -u
2 / y =~ r11
and y =
-n 2• If we let the first equilibrium point be (x el , yel )
and substitute the corresponding r and s into the equation
4.2, we have
Vx-xel )+
(xy- x
elyel 5+ u
l(y -yel 3
= °
(eqn 4 . 5)
n2(x-x
el ) + (xy-xel y el )
+ V^el 5= °
13

case (e)
case (d)
s
ns
unstable
stable
neutrally stable
Figure 4.2 Types of Equilibria
44

Next, the distances between the asymptotes are defined as
u _ \i
2 1
yn2
- n
It is not difficult to see that £x and £ will
decide where the hyperbolas intersect. For instance, when £X
> and > 0, there may be two equilibria in the first
quadrant 3 (See case (b) of Figure 4.2). In general, the
second equilibrium point (X , Y ) can be fouQd by elimi-
nating y or x from eguation 4.5 and comparing coefficients
with (y - y el ) (y - y e2 ) and (x - xel ) (x - x
q2 ) . The final
expressions are
e2 ew el 1 1
y e 2 " F1( x el
+ V " \x
(eqn 4.6)
4.6 can be
£ plane.
For constant x , # xe 2' ^ l'
an<^ ^ 2' equation
written to represent two straight lines in £x ,
The equations of these two lines are
y =
y =
(y., + V£ w e2x
(xel v
(xe2 Vl )
(eqn 4.7)
3 In our context, the quadrants are defined by the asymp-totes and not by the x, y axes.
45

b. Types of Equilibria and their Stability
To derive the different types of equilibria and
their associated stabilities, we make a transition from the
x, y plane into the e x , e plane. Briefly, the basic
approach is to fix ore equilibrium point (x , , y ) on the
first quadrant hyperbolas and consider the regions in the
ex , e plane when we have the other point in various places
of the x, y plane. The other essential step is to express
the stability criteria (equation 4.4) in terms of £ x , e ,
u, - ru * x n/ y , . A summary of the results which are derived-Llelelin Appendix D is given below :
(1) When both equilibrium points are on the first
guadrant hyperbolas ( case (b) in Figure 4.2 ), cne
will be stable and the other unstable;
(2) When one equilibrium point is on the first
quadrant and the other on the third, both can be
unstable or one will be stable and the other
unstable ( case (a) in Figure 4.2 );
(3) When both equilibrium points are on the third
guadrant hyperbolas, both are unstable ( case (c) in
figure 4.2);
(4) When there are infinite number of equilibria as
in case (d) in Figure 4.2, £x
= e = and the two
sets of hyperbolas merge. Equilibria lying on the
first quadrant hyperbola are neutrally stable (one
eigenvalue equals zero) and those on the ether
hyperbola are unstable;
(5) When there are repeated equilibria as in case
(e) in Figure 4.2, they are neutrally stable if the
hyperbolas touch in the first guadrant ; otherwise
they are unstable.
46

Host of the above results are embedded withinFigure 4.3 which is reproduced from Appendix D for conven-ience. Evidently, both the coordinates of the equilibriumpoints (x e , y ) and the location in the e ,
mine the stabilities. The e , e
x , £yplane deter-
plane has been subdividedinto a few regions each with distinct stabilitycharacteristics.
y
SXu
(xel' >W
unstable;Ue2 , > e2 )
stable
^^ as above
32E both' unstable
stable;(x
e2' y
unstable
(x D y -Je2' J cl J
as above
7 rX
^l+xeP
E..-E
Figure 4.3 The c r e Plane.X y
The case of infinitely many equilibria corre-sponds to the origin cf ex , £y plane ( y
]_= y
2 , n1= n
2 . ) . The
only way for two sets of hyperbolas to merge is for theirrespective asymptotes to merge. This case is a degenerate
HI

instance of repeated equilibria ( case (e) in Figure 4.2 ),
which is shown in Appendix D to correspond to operating
points on the line e = e (Y + n-^/CX + ux ) as illustrated
in Figure 4.3.
As a corollary, we note that there cannot be two
stable equilibrium pcints in the 1*1 problem. This deduction
can be made by referring to Figure 4.3. There is no region
in the £x , £ plane which allows for this case. At most,
there can be two neutrally stable equilibria which are
repeated. Numerous attempts have been made to obtain two
stable equilibria in the 2*2 problem, but in vain. Whether
it is also true for 2*2 or higher dimensional problems that
only cne equilibrium may te stable is still a matter of
conjecture.
In Appendix E, the relations between the regions
on the e x , e plane and their associated stabilities are
verified. Some representative points on the £ x , e plane
are chosen and their stabilities checked.
E. SISIEM DYNAHICS
The dynamics of a 1*1 system are characterised by its
phase trajectories, which are curves on the x-y plane
describing the history of the system as the time, t,
changes. These trajectories can be conveniently obtained by
integrating equation 4.1 numerically.
Needless to say, being able to predict the trajectories
is important, for it means that we know how our model of a
battle progresses. Cnce the factors influencing the course
of a battle are known, appropriate command decisions can be
introduced to ensure favorable battle outcome. In Chapter V,
we will see how many cf the results obtained in this section
can be used to rationalize and predict battle outcome.
48

Some typical trajectories corresponding to the different
types of equilibria are described in the next subsection.
Besides the stability which influences trajectories, it was
briefly mentioned in Chapter III that domains of attraction
also affect the trajectories. In the subsection that
follows, ve will show specific examples of the way to deter-
mine the domains by finding their exact boundaries.
1. Trajectories
Two methods cf establishing the trajectories from a
given initial condition will be described. The brute-force
method which has been mentioned uses numerical integration.
The ether method which often provides better insight, is
more graphical. The graphical method is based on a few very
simple rules to predict the gross behavior of a trajectory.
Some cf these rules are listed below :
(1) A stable point "attracts"; unstable point
"repels"
;
(2) Points on either side of a boundary move into
their respective domains;
(3) For large (x, y) , trajectories are governed by
the Lanchester "linear law";
(U) Points near the hyperbolas can be easily
analyzed by noting the signs of x and y.
As an example of using the graphical method to
determine trajectories, consider a region around an unstable
equilibrium point on the first quadrant hyperbola. The whole
picture of the phase trajectories (sometimes called phase-
plane portrait [Eef- 9] ) can be put together in a logical
fashion by using those simple rules. Since this equilibrium
point is unstable, trajectories will be expected to diverge
from it. As an unstable equilibrium point, it will have a
boundary line passing through it. Initial conditions start
49

from each side give rise to different trajectories. Next, we
determine the signs cf x , y on both sides of each hyperbola
as indicated in Figure 4.4 where only one intersection is
shown.
y
X>0Y>
-* x
Figure 4.4 Analytical method of predicting trajectories.
Note how predictable these trajectories are. If,
for some reasons, the exact trajectories are required, we
can resort to the brute-force method. The methods are obvi-
ously complementary in nature. The advantages of the brute-
force method are accuracy and simplicity. In Figure 4.5, a
typical computer plot consisting of ten trajectories is
shown. The program which produces the plot is included in
Appendix F.
Referring to Pigure 4.5, the trajectories cross the
hyperbolas and move asymptotically along a common curve
50

y4
hyperbola
-* X
Figure 4.5 Computer Plot of Trajectories.
lying between the hyperbolas. This same property is exhib-
ited by other cases. Even the special case with no hyper-
bolic intersection has been found to behave similarly as can
seen in Figure 4.6.
Our ability to determine the trajectories and
present them vividly is partly due to fact that two-
dimensional pictures can be easily drawn and visualized. For
dimensions higher than the third, it is impossible to visu-
alize trajectories; however, the notion of trajectcries can
be conceptually extended to n-dimensional space. Thus, it
seems likely that in the higher dimensional systems, trajec-
tories cross hy persurfaces and move along a common asymp-
totic curve analogous to that in the 1*1 system. Further
studies are required before this behavior can be confirmed.
51

Figure 4.6 Trajectories when Hyperbolas do not Intersect.
2 • Boundaries of Domains of Attraction
In Chapter III, the idea of the domains of attrac-
tion was briefly discussed. In an n-dimensional space, such
a domain is a region or volume in which all initial points
come under similiar influence. Khen domains exist, there
will be boundary surfaces which can be thought of as
collections of invariant curves passing through unstable
equilibria.
For a 1*1 problem, domains and boundaries are net at
all abstract. In the last subsection, they have been shown
to affect trajectories. Recall that in Chapter III, we
mentioned a simple and yet effective way of finding the
boundary curves and establishing the domains in the x-y
plane. Examples on the use of backward integration to obtain
boundary curves are now presented.
52

a. Boundary Curve through an Unstable Point
Starting from an unstable point, we apply small
perturbations in both directions perpendicular to an eigen-
vector associated with the most positive eigenvalue and
integrate backward in time (in the computer program, this is
easily done by employing negative time steps for integra-
tion). The result is a smooth, invariant curve which is
exactly the boundary or the so-called separatrix lik€ the
one shown in Figure 4.7.
Boundary
Figure 4.7 Boundary Curve through an Unstable Point.
To verify that the curve is indeed the boundary,
two initial points are chosen just off the curve (e.g A, B
in Figure 4.7). if we forward integrate from these two
points, they move into different domains as indicated in the
same diagram. Appendix G contains a Fortran program that
does the backward integration and plots the boundary curve.
53

3. Boundary Curve between Two HX£erbolas
Boundary curves do not necessarily pass through
unstable points. Backward integration methods can also be
used if a boundary exists but there is no unstable equilib-
rium point to serve as the starting point of integration.
This is best illustrated by considering the case of both
equilibria en the first quadrant hyperbolas. In this case,
there is no equilibrium point in the third quadrant; never-
theless a boundary does exist between the third-quadrant
hyperbolas. The existence of the boundary is visible by
simply censidering the signs of x and y on both sides of the
hyperbolas. In figure 4.8, the signs of x and y and also the
directions of some typical trajectories are depicted.
-X +-
/
-Y
Figure 4.8 Existence of Boundary Between Two iyperbolas.
To obtain the exact boundary, choose a point close
to a hyperbola and en lower part of the hyperbolas (e.g.
point P or Q in Figure 4.8) and integrate backward. The
result is a boundary curve as shown in Figure 4.9.
54

-X «-
hyperbola! -/
Figure 4.9 Exact Boundary Curve Between Two Hyperbolas.
4 . Sum mar y of t he 1*1 Problem
We have seen the close relation between system
asymptotes and stabilities. Through the use of newly defined
variables e and e , the stability of different types ofx y
equilibria has been derived. Five cases have been identi-
fied, and they correspond to the types of intersections on
the x-y plane. For example, if both the equilibria are found
on the third quadrant hyperbolas, then we know that they
will be unstable.
Two methods of establishing the trajectories have
been described in this chapter. These two methods conplement
each other and the choice depends on our requirements. Ihe
dynamics of the system are characterized by the trajecto-
ries, which as we have seen are very predictable. These
trajectories are influenced by the stabilities of equilibria
and domains of attraction which are separated by boundary
curves. A simple way of plotting the boundary curves has
also been presented along with specific examples.
55

The results derived in this chapter will be applied
in the next chapter. The knowledge of the system dynamics
and how they are affected by stability and other parameters
will enable us to analyze changes in force levels as the
battle progresses.
56

V. STRATEGY JOB INITIAL FORCE COMMITMENT
Id the last two chapters, emphasis has been placed on
establishing the mathematical framework of the system
dynamics and stability. In this chapter, we examine some
model operational problems that are related to stability and
dynamic considerations.
One of the major command decisions that has to be made
during a build-up period of a war pertains to initial force
commitment. A good strategy calls for a balance between
initial deployment and reserves. In practice, a multitude of
factors have to be considered before deciding on a partic-
ular commitment. The approach in this chapter provides us
with a set of mixed strategies but does not consider intan-
giable factors like world politics, national economy,
survival factor and so on.
Stability has been shown to effect trajectories which in
turn effect battle outcome. Recall from Chapter IV that
there are some trajectories which represent speedy and
complete annihilation of one force; hence it seems reason-
able that the side that is tipped to win the battle will
want to operate on an unstable trajectory. But to what
extent can one exploit the stability behavior of the system
to influence battle outcome? Obviously there will be prac-
tical limitations; an important one of these is total avail-
able resources.
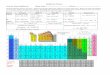
A. PBOBIEfl STATEMENT AND APPROACH
The problem statement is as follows :
Given total defense resources Q x , Qyfor x and y
respectively, what is the optimum set of strategies for
initial force ccnmitment, X and Y?
57

We begin by treating this as a 1 *1 problem at the stra-
tegic level. The dynamics of the problem are thus governed
by eguation 4.1. Both sides are assumed to operate initially
at equilibrium with constant replenishment rates given by
r = X(u + aY) + bY
s = Y(v + cX) + dX
(eqn 5.1)
Since both sides have limited defense resources Q , Qv ,
the replenishment rates versus time may be as shown in
figure 5.1, where Q = rT and Q = sT .3 x x y y
I replenishment
r
sI•
I t
T \
Figure 5. 1 Replenishment Versus Time.
The next step is to select some suitable form of payoff
function which is to be optimized for a certain choice of X
and Y. The payoff function (from X to Y) has been chosen to
be
A(X,Y) = Ly
L
where Lx , L = Total losses for x, y at battle termination
58

As each side runs out of resources at different times,
the simulation is conducted in stages. The total losses are
determined by simulating the dynamics of the system until
one of the force levels drops to ten percent of its total
resources, Q.
If X and Y are assumed to be chosen from a finite set of
values, then for each pair (X,Y) , one A(X,Y) can be
obtained. A payoff matrix can be formed and the problem can
be treated as a two-person game. Based on the mirimax
theorem, there exists a set of optimal mixed-strategies and
one convenient way of finding them is through the use of
linear Programming.
It is perhaps worth-noting that the approach is
computation- oriented. It has been made feasible by the
availability of high-speed computers and efficient software
for numerical computations.t
E. HOLTISTAGE BATTLE
Dsing the above approach, the entire battle can be
divided into three stages, namely
(1) Both r and s are nonzero
(2) One of the r or s equals zero
(3) Both r and s are zero
1 . St acje JT_
This stage will be the period from outbreak of war
to the time (T ) when one side runs out of resources. It is
also possible that x < 0. 1Q or y < 0.1Q before T isr x -*
y 1
reached, in which case the battle is over. In general, this
period T can be written mathematically as
T, = Min IT , T [
1 ' x* y
'
59

During this stage, the dynamics of the system is
given by the familiar 1*1 system
x = -x(u + ay) - by + r
(eqn 5 . 2)y = -y(v + ex) - dx + s
Khen this 1*| system is integrated, just as in
Chapter IV, the resulting trajectories behave similiarly.
However, there is a irajor difference. Now, we no longer
have unlimited defense resources, and this stage will not
last forever. It implies that, unless Q x or is extremely
large 4, trajectories which reflect quick annihilation of
one of the forces are rare. In general, T x and T are given
by
TQ - xxx
x r
TQ - Y_T
y s
If one of the force levels drops to less than ten
percent of Q x or Q y , the battle is arbitrarily considered
over and the losses are calculated as in Figure 5.2. Iht
finish time (FINTIM) is simply t, the time when x < 0.1Q orx
J < 0.1Q .
2- ita^e 2
Since either x or y can run out of reserves first,
the dynamics of stage 2 are governed by either equation 5.?
or 5.4 respectively.
4 QX or Q may be very large if x or y is backed by a;uperpower whe is fully, committed to provide military aid.
60

Lx
= °- 9QxLy
= (t*s) +
(Y - y)
A(X,Y) = L - L
Mo
Continue
Integration
-(STOP^-
^L
Lx
= (t*r) +
(X - x)
L = 0.9QAr
y tA(X,Y) = L
y- L
x
Figure 5.2 Losses at Stage 1.
x = -x(u + ay) - by
y = -y(v + ex) -" dx + s
(eqn 5.3)
x = -x(u + ay) - by + r
y = -y(v + ex) - dx(eqn 5.4)
Unless the battle ends earlier, this period will
last for T 2 which is given by
T, = Max (T , T | - T,2 « x* y
'
1
During this period, the trajectory will be different from
that in stage 1. This is because when r = or s = 0, one of
the hyperbolas is shifted so as to cross the origin and we
61

have different equilibrium points. The trajectory will now
be influenced by the new equilibrium point. This is illus-
trated in Figure 5.3.
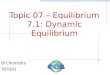
Calculations of the losses are more complex than in
stage 1 since there are now two cases to deal with i.e. r =
or s = 0. The procedure is shown in Figure 5. 4.
3 . St aqe 3
If the battle enters stage 3 without either x <
0.1Q X or y < 0. 1Q then the dynamics will be dominated by
attritions since r = s = 0. Equation 5.5 is now used for
integration.
x = -x(u + ay) - by
y = -y(v + ex) - dx(eqn 5 . 5)
Again, the trajectory will have to change because
now both hyperbolas pass through the origin. This is illus-
trated in Figure 5.5 where we show how the intersection at
stage 2 has changed. Losses and FINTIM are calculated in
accordance with the procedure in Figure 5.6.
C. MIXEE STRATEGIES
The range to Q 5 for both X and Y can be subdivided
into o force levels. There are m*m pairs of X and Y and
corresponding number of payoffs, A(X,X). We thus have an m*m
payoff matrix having elements A(X,Y) . Figure 5.7 gives a
pictorial representation of this two-person game.
5 In the actual program. one may wish to restrict theange of X and Y to interval (0.2Q - 0.75Q) to reflect prac-ical linitations in initial force deployment.
rantic
62

X>u~u
oII
• X(U
—
t
T3 fNI r—
!
O <y XIQJ U 0) r—
1
ra
Xj\ 4-J CP XJ -p
(0 •H (0 (0 mJ->
(—4J JJ c
in 03 in (fl 3
C3
c
2ec
uoV.
o
u
o
o
uo
•—
.
s-
o
63

r=0
Integrateeqn 5 . 3
L = Q - X
L = s(T +y ^ x
A(X,Y) = LV. > J
y xFINTIM = t + T
x
t)
- L
+ Y
<STOP>
s =
Integrateeqn 5 .
4
-Yes
L = r(T + t) +x v v J
L = Q - y
A(X,Y) = L - LK > J
y xFINTIM = t + T
v
NO
Figure 5.4 Losses at Stage 2.
In the last section, the procedure for computing A (X,Y)
has been described. A simple program can be written to
compute each element of the payoff matrix. One such program
is given in Appendix H.
64

ro
OCOa*->
in
COc
co
uoCO
u
o"p
a
-d
cH
tno
ouo•I—
>
fO
LO
LO
ou
65

No
integrate eqn 5.5
L = Q - xx xx
L = Q -
A(X,Y) = L
y
yFINTIM = Max |T
x, T
j
+ t
(stop)
Figure 5.6 Losses at Stage 3*
There are a few ways of presenting and interpreting the
payoff matrix. A normal practice is to present it in tabular
form and consider only pure strategy. Alternatively, a plot
of A(X,Y) as a function of X and Y could be obtained. When
using pure strategies, it has been observed that the game
does not always have a saddle point [Ref. 10] and it would
be better to use mixed strategies.
In mixed strategies, x and y may play all their strat-
egies in accordance with a certain set of probabilities.
Although in our situation, x and y can only play once, the
same concept of mixed strategies is still useful. If we let
p and g be the probabilities by which x and y select theiri J
ith and jth pure strategies respectively, then
66

xl
X-
x 7
m
Yl
Y2
Y3
. Yin
A(X,Y)
Figure 5.7 Payoff Matrix.
E pi"Zqj
=
IP i
> 0, q^ >
Id addition the (i,j)th entry of the payoff matrix be
denoted by a^j, the probabilities can be represented by the
matrix below
Lm
Pl Pz Pm
all
al 2
alm
•
•
•
•
•
•
•
a 1mla tmz • • • amm
Ihe optimal mixed strategy is based on the mini max
criterion- Mathematically, x and y select p. and g. which
67

will yield D and V as given equation 5.6 and equation 5.7
respectively.
„ _ maxu =
imm
Pi
m m m
L ailPi • Z ai2Pi"-" E a
imPii=l i=l i=l
(eqn 5.6)
nunv =
\ maxm m
j-i j-i
mVa .q.
j=l(eqn 5.7)
Appendix I describes how the problem of solving for the
optimal values of p. and g. can be put into linear program-
ming form. The program given in Appendix H also computes
this optimum set of solution in addition to obtaining the
payoff matrix.
The concept of mixed strategies is quite intuitive if a
game is to be played repeatedly. But since we are using it
to provide us with an optimum set of probabilities of
selecting the pure strategies, some interpretation is
required. Although the optimum mixed strategies have been
obtained, a pure strategy still has to be selected and used.
However, it is important that the selection process should
be random 6 according to the optimized probabilities
obtained.
One simple but valid statistical procedure [Ref. 11] to
select a pure strategy from a set of mixed strategies is to
first plot the probability distribution function. A random
number generator is then used to generate a number between
zero and one. The corresponding value of the strategy could
then be selected. This procedure is shown in Figure 5.8.
6 The selection process must be random otherwiseopponent can select a strategy to improve his outcome.
the
68

1.
P(X<x )
randomnumber
1
1
strategy Xselected
Figure 5.8 Obtaining Pure Strategy from Mixed Strategies.
D. EXAMPLE DSIHG KOEEAN BAR DATA
One cf the main objectives of using actual historical
data in a model is for validation. It is important that the
results obtained using the model should at least be consis-
tent Kith actual events. The Korean War has been chosen
because there was a clear-cut victor during the initial
phase of the war. We consider the period when only North
Korea and Republic of Korea (South Korea) were involved.
Before the entire simulation can be carried out, the
actual force strategies, fighting ability, weapon state,
etc, have to be transformed into familiar quantities and
parameters such as Q x# Q , X, Y, a, b, c, d,..., and so en.
This transformation, together with some background data on
the Korean War are given in Appendix J.
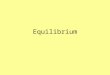
1 • Eesults and Eiscuss ions
First we examine the resultant trajectories during
the three stages of the battle which are shown in Figure
5.9. The simulation uses the X and Y which correspond to
69

the actual initial deployment by both North and South Korea
respectively. Clearly we see that the victor is x, as it
was in history. The result of the simulation also shows the
three stages explained in the last section. Note that the
trajectories for the first and second stages are curtailed
because both sides run out of war reserves. The implication
is that in practice, the kind of trajectories leading to
large and rapid changes in force levels are rather rare.
However, the effect of instability on battle outcome
is borne out by experimenting with the directions of pertur-
bations. Consider the case in which x (North Korea) fixes
the initial force and y (South Korea) varying the initial
force levels around the equilibrium point. In Figure 5.9,
these perturbed points are denoted by points A to D spanning
across tbe boundary separating the domains of attraction.
Prom our understanding of the stability and system dynamics
each perturbation will give rise to different trajectory and
payoff at the end of the simulation. Clearly, y will want to
operate at the perturbed points A or B rather C or D since
the former will result in the trajectory for stage one to be
in a decreasing x direction. Table II shows the variation in
the payoff as the perturbation point changes. When the
perturbed points are at A or E, the payoffs to x are less
then those for points C or D. Thus we have seen how an
unstable system can be used to inflict heavier losses on the
opponent. The more unstable a system gets, the more signif-
icant will be the effects of initial perturbation which are
manifested by initial victory and element of surprise. Since
some systems with large aimed-fire coefficients tend to be
highly unstable, we can expect this effect to be most
pronounced in battles involving high-technology and highly-
lethal weapons.
The payoff matrix and optimal probabilities p. and
q. are shown in Table III. The results suggest that the
70

TABLE II
Effect of Different Perturbations on the Payoff
Location inFigure 5.9
A
B
C
D
Co-ordinates ofPerturbed Point
5.05)
3.025)
(6.7,
(6.7,
(6.7, 2.975)
(6.7, 2.95)
Payoff to X
2.39
2.41
2.45
2.47
'y
^^~^~-^Z^^^^^^^^^ B Astage]. .
••••-
Hyberbola " ^=====:::=*,'"r"'^^^
during Stage 1 ...•••' /\ •
====~=;::^...••-"" c D V sta9e2
...••• \
-#*#'*
^.— v
S?age 3
•IQ/
*-""'"
.X—>
Figure 5.9 Trajectory for Korean War.
71

North Koreans should use large initial deployment. In the
actual war, North KoLea actually deployed almost all of its
regular force and within a few days capture! Seoul, the
capital cf South Korea. The payoff matrix also shows that
no matter which strategy is chosen by South Korea, it is
bound to suffer much more losses than North Korea. Again,
this is in agreement with history since it is an accepted
fact that without US intervention, there would be no South
Korea today.
So far in the example, we have always considered the
situation in which the equilibrium point (X,Y) determines
the replenishment rates as given in equation 5.1. It is
interesting to investigate the effect on the payoff when the
initial operating point is at some other location ether than
(X,Y). let the new initial point be at (X,,Y,) and consider
a case where I 1 is kept equal to X and only Y, is varied.
(X,Y) has been chosen to be (6.7,3.0). In Figure 5.10, three
trajectories corresponding to Y at 2.5, k.Q, 5. are shown
together with the hyperbolic intersection during stage one.
Basically, the trajectcries correspond to the three stages
of simulation as before and x is still the victor. However,
toth the payoff (Ly-Lx) and finish time are slightly
different from operating at (X,Y). Table IV shows that y
inflicts more losses on x when operating at Y above the
boundary curve rather than at (X,Y), but in doing so y is
defeated faster. Thus depending on his mission, a commander
can choose to lengthen the battle or inflict sore casualties
on his opponent by chcosing a suitable operating point which
may be other than an equilibrium point.
72

w> O ~*r^rM<-Mr>i<si<vioi<vi«sj(Mr4rMr<irMr"*krs> u"tO%oOLnwr"-^o«—i fvi ao w o
Kl O 0> O o — —iivijvii—ir^Kif-ifvimr-iKi»nO <->rMr4r^«v»rsi(vi<virsi«virsi»vitvi«NirM
ooo*C^-t**siOKiaoaOK^rsi^LnrsirM
r~»viw»©\>O0^O>0r".fM>c — wr^ —coo a^OOOr^i— r>ji—<r>4KiKifOfMf«iinwo -^^ivjrMrsifNirMrMrMrsii-sirvirsirMrsi
cooor-owO\co^'Or,^»ooo'"McoWO — fNir^rM<virs.rvi<vJ rMr4rM«virsirsl rsi
UTO r*»Kit/tor,,~C"**Cwaoutaoo<^iwco2 WO C> O O — >-* <~-l — ««"l<vi»OK1w'"">rvjr')C WO — fvi<vifv4rMfNirMrsiivifsi<»sifvi«Nir>i<viTO
1)
u I-- <v» w CT\ ~ k* f> — r~ 01 — M O W WlO »^0 OOOC — r*ieif"><-Mf->i-Mww>Ow* •WO — rMrM«vi<virsifNi«>ifMrMrsi<v(rMr^«vi
in r— p- cm r~- ao G •—>eo'^>C%0«or~rsio —4) a— o> o o o — ivi(vi»n<viio(Nirsi(Niwi-)OS wo —i »virsiry|(Ni«si«>MOjrgfMrMfMrsiivirsiU
re c e «*>i r» .-< wwiwoaoowo'vific^•-4 k. CO f> O O O — .— — «-MK>CMr>i<vtf->i"->«vi»-!t-i t-i • - • .
»—• U") Kl © (Nic\jrvir>jivirM<viCM<v««vi«virMr*irM<Ni_1 ^=D tl M e<"Mr- — wk/i"">%Of~u">r*wr~u-iCi«C X <ocn O O O ~ »-i — (vir~irg(viKii-iKiKi(V4
C ^\»oaorMwu">c\r'-crOwco<vifvio« WO (TlOO — -<~-«rMK-llvl^)K1WWK1X KIO -HrM«sifNirM(VifM<-M<vi<-sirMr>ir^rMiviu«-< .—ii/1C»'">»/1<00>SU">C". r- vO OA O — ^^ CM O OO — — — .-.— rsirsirsifOtviKltow
•OO CMrMCM<>MCMCMCMCMrMrMrNirMrMrMrMwO fir».cMW>r».ao — I'lcoooowr'^co>- 0>O CO—. — — — ivirsirvifvifOfOi-nwwTO . ...............C_ CM O rNj<VlfS*fNir«l<-M(VIIVIfM<V|(NI(NlfNI(V4(VJ
wOCMwCiOC'-Lnc^oc^^wcMroI^O O — — — —iCMCMCMCMI»-|CMK1Wf'l»-lcm o cmcmcmcmcmcmcmcmcmcmcmcmcmcmcm
c- — u">aocMi-">u->r-»o%-» — w O cm omo o — — — cmcmcmcmcmkik-iwwwwcm o «viiNi<viCMivirv4(N»rvi(Vi«siivirM(vjfsi<vi
* V. o\ w r»Q. OOOCOOOOOOOO— trtw
>- ^.HOOOOOCOOOOOOOOOa.
i/i ea i—iwr".o»»">\oo\<vii/iao — wr—X . .C^CMKlrOfnwWWWl/lWIU^^vO *0
73

(x^yp-ce. 7,5.0)
(X1,Y
1) = (6. 7,4.0)
""'^(X,Y)=(6. 7,3.0)
[^^ = (6. 7, 2. 5)
>
Figure 5.10 Initial Operating Points at Non-egailibrium Points,
TABLE IV
Effect of Operating at Non-equilibrium Points
2.5
3.0
4.0
5.0
(Ly-Lx)
2.475
2.435
2.353
2 o 305
Finish Time(FINTIM)
0.323
0.313
0.293
0.283
Remarks
Below boundary
At equilibrium
Above boundary
Above boundary
74

VI. COHCIOSIONS AND RECOMMENDATIONS
A- CONCIUSIONS
This thesis has covered a number of subjects which are
based on the generalized Lanchester Model. The first part of
the results has to do with finding the equilibrium points in
the N*N system. The Continuation Methods have been found to
be suitable for this purpose. The advantages of the
Continuation Methods over numerical techniques are numerous
and important to our understanding of the non- linear set of
eguations. The method finds all the equilibrium solutions
accurately and does not need good initial guesses. An
example to compute the equilibrium solutions of a 2*2 system
is presented along with a way to treat singularity problem.
The derivations and interpretations of the relations
between stability and system parameters form the next major
portion of the thesis. By considering the simpler 1*1
problem, a few interesting conclusions have been reached,
namely
(1) Eoth the system asymptotes and equilibrium points
are intrinsic to a system in equilibrium. The locations
cf the equilibrium points on the x-y and e x , ey planes
completely characterize their stabilities; c and zr J x yare the differences in the system asymptotes;
(2) The dynamics of a system are characterized by the
phase trajectories which represent the ways a battle
progresses. Besides stability, the domains of attrac-
tion also influence the trajectories. The boundary
curves which separate these domains can be ascertained
by graphical or backward integration.
75

The last portion of the thesis integrates th= concept of
equilibrium stability and system dynamics. It relates these
theoretical concept to operational problems. Two operational
issues are addressed namely, (1) the effect of varying X and
Y, the initial force deployment on battle outcome, (2) the
exploitation of stability to influence battle outcome. A
methodology which combines multistage battle simulation with
two-person game has been employed and the conclusions are
(1) Initial force deployment, X and Y can be optimized
by finding a set of mixed strategies. A suitable pure
strategy can then be selected from the mixed strat-
egies;
(2) Instability can and should be used to shape the
course of battle and its outcome. This is particularly
true in highly unstable warfare which is normally asso-
ciated with large aimed-fire attritions. Unless defense
resources are extremely large, it is not possible to
completely reverse the outcome of a lopsided-battle
where one side is much stronger than the other.
As far as military commanders are concerned, the above
conclusions suggest two things. Firstly, depending en the
relative strengths, it is not necessarily true that
deploying the largest possible force will bring victory,
reduce loss or even buy time. There is an optimum way of
deploying available forces. Secondly, if a war involves
large aimed-fire attritions due to weapons like aircraft,
missiles, tanks, artillery, naval bombardment, etc., then
initial victory which could perhaps be achieved through a
preemptive strike certainly affects battle outcome.
76

B. BECOBMEHDATIOHS
1 • Transformation of N *N Problem into the 1*J[ Problem
It has been mentioned that the simplicity of the 1*1
problem can be attributed to the simpler mathematics
involved and our ability to draw and visualize two-
dimensional pictures. Despite its simplicity, it does share
many of the properties with the N*N problem. Considering
these factors, it seems logical that an attempt should be
made to find the 1*1 equivalent to the N*N system. Another
reason is that there is much to be gained in terms of
savings in computational effort by going to the 1*1
equivalent.
Of course, the "equivalent" system will not be
expected to be identical to the N*N problem in every aspect.
One can only hope that it is equivalent in some sense, for
example
(a) Preservation of stability characteristics and
dynamics;
(b) Preservation of mixed strategies.
One way of transforming the N*N system into the
equivalent 1*1 system is t o equate losses in both systems.
The equivalent system parameters are obtained by using rela-
tions such as
aX Y VVa. -x.y.eq eq L^Lu ij i' j
i J
where
xvi' 7
j = coordinates of the equilibrium point inthe N*N problem
77

Xea " ZX
ieq
Ye q 2^y j
The results of the preliminary studies suggest that
this method of transformation can preserve some stability
characteristics. The possibility of using the equivalent
system to obtain the mixed strategies should not be
dismissed until further studies have been conducted.
2« lime Variable Replenishment Coefficients
The replenishment rates used in the thesis have
always been assumed to be constant. In actual wars, constant
replenishment rates may not be used by either side; at
times, it may not even be possible to do so. It would there-
fore be interesting to study the cases which involve time-
varying replenishment rates r(t). The choice of r (t) , for
example periodic, non-periodic, ramp, etc. will depend on
how well it represents practical replenishment rates.
Whether a mathematical tool can be found to cope with the
added complexity also has to be considered.
78

C APPENCIX AC SOLVING FOR CPTIMLM VECTORS ANDCCC£********* **********************************************C THIS FRCGRAM COMPUTES THE CPTIMLM FCRCEC DISTR1EUTICN, X* GIVEN X,Y,AND THE ATTRITIONC CCEFFICIENTS. PARAMETERS K1,K2 AND CONFLICTC MATRI> ARE ALSO OETAINED.C THIS IS Art INTERACTIVE PROGRAM. EEF OPE EXECUTIONC , CHECK TPE VALUES OF ATTRITION COEEFICIENTC MATRICES A4,BB,CC,D AND I Ult U2f VI t V2)C IN THE FILE LPU FORTRAN. THEN ENSURE YOU HAVEC ANCTHEF FILE CALLEC CCLIB EXEC. TO EXECUTE THEC PROGRAM ENTER "COLIB LPD" AND FOLLCW INSTRUCTIONS.C ON INFUT OF X AND V HILL CREATE THE A MATRIXC AND RUN THE LINEAR PROGRAM ZX4LP.C************* * *****************************************CC MMl*M2*2,N + Nl+2)C E(M1+M2iC CIN)C FSOL(N)C DSOLIM1 + M2JC RW<I A*(M1 + M2 + 4H-2*(N + M1))C IW(2*(N+M1J +31
REAL Al4 t 7JtB(2) tC(3 J .S , FSOL (3) , DSOL ( 2 J , RW( 34 J
,
£IER,X,Y,M,PHI,BB (2,3 ) ,D(2,3J&,Xl,X2,Yl,r2,Y3,Kl,K2,CC(2,3),AA(2,3J,CON(5,5)INTEGER C,IW(13) ,Ml,M2,IA f N,R
C************* ************ ******************************C V/RIAELE CEFINITICNSQ********* ***** *****************************************cC AA.BB.CCD.Ul ,U2, VI, V2=ATTRTION COEFFICIENTSC PSCL,OSCL = FRI MARY AND DUAL SOLUTIONC M1=NUMEER CF ECUALITY CONSTRAINTSC M2=NUMEER CF INEQUALITY CONSTRAINTSC RW,IW=FARAMETERS USED BY IMSL ROUTINE 2X4LFC IEP=ERROR CODE FROM ZX4LPC N=NUMEER OF UNKNOWNSC A=MATRI> DEFINED IN ECUATION A. 3 OF PAFERC "LANCHESTER EGUATIONS AND GAME THEORY"C BY P. H. MOOSE AN C J. M. UQZ ENCR AFTC C = WECTCR CONTAINING COEEFICIENTS CFC OF OBJECTIVE FUNCTION IN LPC B=VECTOR CONTAINING THE RIGHTHAND SIDESC OF THE CONSTRAINTS.C I A=M102 + 2;IS THE ROW DIMENSION OF A M/STRIXC Q=COLUMN DIMENSION OF A
Ml =2M2=0N=3IA=Ml+M2+2C =N+Ml+2P=M1+M2
CUl = .30U2
IIIVIV2 = .0^45V3 = 2.0
/AI1.1J = 1.0AA(1,2) = .3AA(1,3) = 0.0
79

AA12,1) s .604A(2,2) = .900AA(2 ,3) - 0.0
EBC1 til s 0.15BBU ,2) = .10EB(1 ,3) — 0.0£B<2 ,1) s 0.15BB(2,2) s .3EB(2,3J — COCC(1 ili z 1.2CC(1 f 2J s 1.0CC(1 ,31 = 15.CC(2,1) S 1.1CC(2 ,2) s 0.6CC<2,3) - 15.0
0(1,1) - .00D(1,2J = .000(1, 3J = 0.00Di2 t 1) = .000(2,2) = .000(2,2) = 0.0
cc***** ********* * ********************** ******************C REPETITICN LOOP STARTS HEREC**,* ****************************************** **********C7000 CCNTINUECC ENTER > AND YC
WRITE(6,296)296 FORMAT (IX, 'ENTER X ANO Y ONE AT A TIME*)
CC
L
READ(5,*) X,Y
Bl= BE(1,1)+BB(2, UB2= BE<lt2J+BB(2t'2JB3= BE(1,3)+BB(2,3)01= D( 1,1J*[)( 1,2) +01 1,3)D2= D(2,l)+D( 2,2) *C(2,3)
A(l,l)= CC(1,1) - AA(1,1) + (Dl-UD/Y - (Bl-Vl)/X+15.A(l,2)= CC(1,2) - AA(l,2i + (C1-U1J/Y - (B2-V2)
£ /XU5.A(1.3) = CC(1,3) - AA(1,3J * (01-UU/Y - (B2-V3J
£ /X+15.A(2,l)= CC(2,1) - AA(2,1) + (C2-U2J/Y - (B1-V1J
£ /X+15.A(2.2)= CC(2,2i - AA(2,2) + (D2-U2)/Y - (B2-V2)
£ /X+15.A(2,3)= CC(2,3i - AA(2,3) + (D2-U2)/Y - (B2-V3)
CWRITE U4.9S9J ((I. J,A(1.J] ,J=1 ,2) ,1=1, 2)
99 9 FORM AT (• 0'. ,3X,«A( • ,13, 13, ') = « ,F10.3JC
B(l) = 1.0B(2)=1.0
1000 CCNTINUEC
C(l) = 1.0C 121 = 1.0C(3)=1.Q
80

W PIT E (14, 130)130 FOPMATdX, 'COEFFICIENTS OF CONSTRAINTS iAJ'J
DO 30C 1 = 1,
R
WRnE(14,200) (A( I,K) ,K=1 ,N)C THIS NUMBER = N+Ml+2200 F0PM/1T(1X,7F15.6)300 CONTINUEC
CALL ZX4LP (A, IA,B,C,N, Ml, M2,S ,PSOL ,DS0L,RW ,
€ I W,I EF J
CC***** ***************************************** *********C CCMPLTE V1.Y2.Y3 ,X1,X2,M£************** is***:?*****************.******************:c
PH1=SY l=PSCl(l)*Y/PHIY2 = PSCL (2)*Y/ PHIY3=PSCL(3)*Y/PHiX1=DSLU1)*X/PHIX2=DSCl(2i*X/PHIM=X*Y/(FHI-15 J
Kl=( <E1-V1)*Y1 (B2-V2)*Y2 -* (B3-V3)*Y3 * M J/XK2=( (C1-U1)*X1 (U2-U2)*X2 - M i/Y
CQ******************************************* ************C COMPUTE CONFLICT MATRIXq************** *****************************************C
CCM1,1) = LI + AA(1,1)*Y1 AA(1,2)*Y2 + AAU,3J6 *Y3
CON( 1 ,2) = 0.0CCN(1,3)= AA(1,1)*X1 + BBdiliC0N(1,4) = M(1,2)*X1 BB(1,2)COMl,f) = AA(1,3)*X1 BB(1 V 3)C0N<2,1) = COCOM2, 2) = U2 AA(2,1)*Y1 AA(2,2J*Y2 + AA(2,3J
I *Y3COM2, 3)= AA(2,1)*X2 + BB(2,1)COM2, 4) = AA(2,2)*X2 + BB(2,2JC0N(2,ii = AA(2,3)*X2 * BB(2,3)COM3 ,1) = CC( 1,1)*Y1 * D( 1,1 J
CON<3,2) = CC(2,1)*Y1 0(2, 1)CON(3,3) = VI CC(1,1J*X1 + CC(2,1)*X2COM3, 4) = COC0M3,f) = COCCNU,1) = CC(1,2)*Y2 + 0(1,2)COM4, 21= CC(2,2)*Y2 + 0(2, 2)COM4, 3)= COC0N(4,4) = V2 CC(1,2)*X1 * CC(2,2)*X2COM4, 5) = COC0N(5,1)= CC(l,3i*Y3 0(1,3)CON(5,2) = CC(2,3)*Y3 « 0(2,3)COM5,3) = COC0M5,4) = COC0M5,5) = V3 CC(1,3)*X1 + CC(2,3)*X2DO 21CC L4=l,
5
CO 2110 L5= 1,5CQN(L4,L5)= -1.0*CON(L4,L5)
2110 CONTINUE2100 CONTINUECQ***** ******** ******************************************C PRINT RESULTSC************** *****************************************c
W*ITE(14,1SQ)
81

150
160
170C180
190191
192
210
C220
C23
240
570580500510520530540550660670C£*****C£*****c
TdX.'RIGHT HANO SIDES OF CONSTRAINTS (B)«)(14,160) (B( I ) ,1 = 1, R )
THIS NUMBER =M1+M2T(1X,2F10.4)(14,170)(14,180) (C( IJ, 1 = 1, N)7(1X, 'COEFFICIENTS OF OBJECTIVE FUNCT ION (C) )
THIS NUMBER =NT(1X,3F10.4)(14.190) N(14.191) Ml(14.192) M27 (IX, 'NUMBER CF UNKNOWNS (N) = ',120)T (IX, 'NUMBER CF INEQUALITY CONSTRAINT S( Ml J=«
FOPMAWRITE
FCPMAWRITEWPITEFORMA
FOPMAWRITEWPITEWRITEFORMAFCPMA,15)FORMATdX, 'NUMBER OF EQUALITY CCNSTRA I NTS ( /*2) =, 17)WRITEFORMA,F15WRITE
i
1 4 , 2 10 ) S(IX, 'VALUE)
14,220) (PSCL
CF OBJECTIVE FUNCTION(S) =-•
(I)
FCRMA,3F15WPITE
FCPMA, 2F15WRITEFCPMAWRITEWPITEWRITEWRITE
ITEITEITEITEITEITE
ORMAORMACPMACRMACPMACPMAORMACPMACRMACRMA
MIX, 'VALUE CF
(14,230) (OSCL(
,I=1,N)THIS NUMBER
PRIMAL SOLUTION= N(PSOLJ = '
T(1X,.a(14,240)T(1X,'IE(14,570)(14,580)(14 ,530)( 14,540)(14,500)( 14,510)(14,520)
,550),660),670)
X
I),I=1,R)THIS NUMBER = M+M2
•VALUE CF DUAL SOLUTION (DSOL) =
(14(1414(IX(IX(IX(IX(IX(IX(IX(IX(IX(IX
IERR =XYXIX2YlY2Y3MKlK2
I5J
YYlY2Y3XIX2MKlK2
,F1,F1,F1,F1,F1,F1,F1,F1,F1,F1
.6)
.6)
.6)
.6)
.6)5.6)5.6)5.6J5.6)5.6)
44******4*4 44************************4**4*********PRINT PARAMETERS444****4 44**44******4 44 444**44**4 4444 4*4*4444*****
WPITE (14WRITE (14WPITE (14WP1TEU4WRITEU4WPITEU4WRITE(14WRITE( 14WPITE (14WPITE(14WPITE (14WPITE(14
705)710)715)7 20)725)769)750)7 70)750)7 80)750)790)
UlU2VIV2V3
((AA(I ,J),J=1,3),I=1,2)
((B£(I, JJ,J=1,3),I=1,2)
((CC(I ,JJ,J=1,3) ,1 = 1,2)
82

70 571071572725750760770780790
C
c£****c*c
673674C£*****c£***:**c
wFFFFFFFFF
F
FITE (14,OFMA7 ax
<(D
0RMA7OFMA70RMA7ORMA70FMA70RMA7OPMA7ORMA70RMA7
(IX(IX(IX(IX(IX(IX(IX(IX(IX
750 J
UlU2VIV2V32F15.5JVALUEVALUEVALUEVALUE
( IttFltFltFltFl,F1
OFOFOFOF
J55
5
55
ABC
) ,J=1,3).6).6).6).6).6)
MATRIXMA7R1XMATRIXMATRIX
tl=l,2)
(AA)(bBi<CC)(0)
390400410
420
430
440
450
460C
C
c
******************** *******************************PRINT CC^LICl MATRIX**************************************************
WRITE (14,673)WRITE (14,674) ( (CCN(L4,L5),L5=1,5) ,14=1,5)F0FMA7 (IX, 'VALUE OF ThE CONFLICT MATRIX (CON) "JF0RMA7(lX,SF14.o)
********* * * ** *** ********* *****j?*******************PRIN7 MEANING OF I ER********* *****************************************
WPITE(14,390)WFITE (14.4C0)WRITE( 14,410)WRITE (14,420)WRITE (14 ,420)WRITE( 14,440)wPITE (14,450)WRITE (14,4*0)F0PMA7UX, • • )
FORMAT(1X,«IER=130F0RMA7(1X, , IER=131• )
FCPMA7(1X,«IER=132CONSTRAINTS 1
)
FQPMA7(1X, I IER=134 INCICATES GBJECTIVE FUNCTIONUNBOLNCED' )
F0RMA1 (1X,»IER=135 INDICATES CCNSTPAINTSI NFEAS JELE«)F0PMA7 (IX, «IER=136SOLUTIONS' )
FCPMAT (9X,«00 NOT SATISFY THE CONSTRAINTS')
INCICATESINCICATES
M2>N» )
EXCESSIVE ITERATIONS
INCICATES REOUNCANCIES IN
INCICATES PRIMARY GP DUAL
******** ******************************************REITERATICN RCUTINE********* *****************************************
470480
CONTINUE ENTER 1«STOP ENTER -!• )
49049149 2
9000
WRITE U,47C)WRITE (6,480)FCRMAT (1X,«T0F0RMAT(lX,«TOREAD(5,*) L7lF(ABS(L7*1.0).LT„l«.0E-5) GOTO 9000WPITE(14,490)WRITE (14,491)WRITE( 14,492)FORMAT (IX, • • )
F ORMAT ( IX i ***********************************
J
FOPMATdX, • • i
GOTO 700CCGNTINUESTOP
83

APPENDIX B
NOMBEB OF EQUILIBBIOH SOIDTIONS OF THE N*N PROBLEM
We first consider the 2*2 and 3*3 problem and extend the
results to the N *N problem.
1 • 2*2 Problem
In general, each trivial solution leads to a unique
equilibrium solution in a continuation process and there
will be egual number of equilibrium and trivial solutions.
Section 4 discusses what happens when there is degeneracy.
The trivial solutions are obtained by solving
zl(u
l+a
llZ3ia
12:4
)=
°
z2
( u2+a2lV a22V =
° (eqn B.l)
Z3(U
3+C
11Z1+C
21225
= °
z4(u
4+C
12:l+C
22Z 2l
=°
At first glance, there would seem to ba 24 trivial
solutions corresponding to the number of ways of making the
lefthand sides of equation B. 1 zero. Each lefthand sides can
be made zero by either making z- or the terms in parenthesis
equal to zero. But closer examination reveals only six
allowed cases, in non-degenerate cases, corresponding to (12+2 + 1) =6 solutions. Table V shows how these cases
arise.
84

TABLE V
Trivial Solution for 2'-': 2 Probem
Case z. which are made zero Remarks
1
2
3
4
5
6
7
'2' Z 3'
;
3
=
= 4 cases
all terms in parenthesiequal todegenerate case;see section 4.
2. 3*3 jroblem
Here, the trivial solutions are obtained from
Zl(u
l+ allV a
12Z5+ a
15Z6
Z2(u
2+a
21Z4+a
22z5+a
25Z6
3^ u3Ta
31Z4+a
32z5+a
33z6
z^(u3+a
Z4(U
4+C
11Z1+C
21Z2+C
31Z3
Z5(U
5+C
12Z1+C
22Z2+C
32Z3W C
13Z1+ C
23Z2+ C
33Z3
=
=
=
=
=
=
Again, there are some cases which are not allowed
because cf inconsistencies in non-degenerate cases. Table VI
shows the different cases.
In this case, the total number of allowed cases is
/_x2 /,x2
[ 1+ 1 ] - 20
85

TABLE VI
Trivial Solution for 3*-': 3 Problem
Case vjhich are made zero Remarks
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
'2
'4
'6
"4
'5
•X6
22'
Z3 ; z
-
'6
'6
'5
'6
'6
:
B
:
6
= 9 cases
9 cases
all items in parenthesisequals to .
degenerate case;see section 4.
degenerate case;see section 4.
86

3 • Extension to N* N Problem
Now we know the type of allowed cases, it is easy to
recognise the pattern of results. The pattern looks like a
Pascal triangle with each element squared.
N*N
1*1
2*2
3*3
4*4
5*5
I2
* I2
I2
22
+ I2
I2 + 3
2+ 3
2l2
1* 42
62
42
l2
I2 + 5
2+ 10
2+ 10
2+ 5
2+ 1
Number ofEquilibria (Nj,)
= 2
= 6
= 20
= 70
= 252
For N*N in general,
v 2
N, 2i-0
N can also be written ask
N,
The proof of the identity,
N
2N
N",
E ; -ft=
can be found in [Ref. 12].
87

4 . Degeneracies
Por the 2*2 problem, a degeneracy can arise when z,
(or any ether z .) is made equal to zero. The other three
lefthand sides in equation B. 1 are made equal to zero making
the terms in the parentheses egual to zero.
In general, such a case does not correspond to a new
trivial solution because there is an inconsistency when z2
=
-u /c and z = -u /c . However, it seems that by making
u3/c 21
= u /c , the inconsistency no longer exists and
there will be an infirite number of trivial solution as long
as z3
, z4
are chosen to satisfy u2
+ a z + a z = 0. It
turns out that the number of equilibrium solutions still
remains at a maximum of six (disregarding the case with
infinite number of eguilibria) . Similarly for the 3*3 case,
even if there is degeneracy, the number of eguilibria will
not exceed 20.
That the above is true can be shown by considering
the 1*1 problem. In this case, the two non-degenerate cases
correspond to (a) x = y =0 (b) v + ex = and u + ay = 0. A
degeneracy can occur if v = or u = in which case there
seems to be an infinite number of trivial solutions lying on
the y or x axis respectively and hence an infinite number of
equilibria. But when the actual hyperbolas are plotted,
there are only two intersections and hence two equilibrium
points, furthermore, when the Continuation method is used to
find the equilibria, there are only two equilibria irrespec-
tive of whether the trivial solutions are chosen to be
degenerate or not.
88

ccC APPENDIX CC PROGRAM LISTING FOR SOLVING 2*2 SYSTEMC USING CONTINUATION METHODCccc*** ********** 4*******************************4****4*****C THIS PROGRAM SOLVES A 2*2 SYSTEM FOR THEIRC EQUILIBRIUM PCINTS USING CONTINUATION METHODS. SEEC SECTICN I II B PUR THECRY ANO IMPLEMENTATIONS.Q***** ******** 4 44****************************************c
REAL * 8 />,X,CEL .T.rtKAREA.FNORM, WK,U,R,B ,C,D,EP,AP,£XT,DX,GMA>,XF7EMP,TLEFT,T$,F1,F2 ,F3,F4,ERRPEAL * 4 >^,XE,XCtXO,TAINTEGER I iJ,K,Nt M ,MM ,CQUNT,
I
A,I DGT , I ER,NS IG, I E, I REP&, CON, KK,NRECGN, SIGNL .FAST, QCOUNT. RON . ERF L AG , REFL AG, C HFL AG ,CTR ,CP 1 ,JJDIMENSION WKAREAi 100 J ,WK { 11 5 J ,BP (4J , APi4 , 4J ,
6XAU0C5 J ,XE(1CD5 J ,XC<1005)£tXD< 1C05J ,TA(100 5) ,DX<4)EXTERNAL fCNCOMMON /PEPLEN/ R(4JCOMMON /P4RAM/ A ( 2 ,2 ) ,B( 2 ,2 i ,C( 2 , 2 J , D (2 , 2 ) ,U ( 4)COMMON /TREPAR/ XT (4 ) ,X ( 4J ,
T
<4J , TS, F AST , CON , COUNT ,N£,OMA X, Q COUNT, PUN, XFTEMP, SUM .SIGN, I ERDATA OEL/l.OD-16/,
£ MM/1 / ,M/ 1/, NS IG/ 5/, I TMAX/ 200/, ID GT/O/, I A/ 4/,&ERFL AG/0/ ,REFLAG/0/
C£***** 4*** 44**4 44**«****4**********************4*********C VARIABLE CEFINAT10NSQ***** 44** *** 4 4 4 4 4* 4** ************************* **********CC AP^SEE EQUATION 3-7 FCR THE MEANING.C EP=AS ABCVtC >=THE ROCT OF THE 2*2 SYSTEM TO BE EVALUATED EY THEC CONTINUATION PROCESS.C T=PARAMETER DEFINING THE HuMOTOPY;HAS VALUE BETWEENC C AN C 1 . CC CEL=SMALL TIME INTERVAL USED TO APPROXIMATE TFEC PARTIAL TIME DERIVATIVE.C AS, BS,CS,DS = THE ORIGINAL A,B,C,D PARAMETERS IN THEC LANCHESTER ECUATIUNC U,R=CCRRESPCNO TO THE SELF ATTRITION £ REFLENISH-C MENT CCEEF. IN THE LANCHESTER EQUATION.C TS=PARTITJON INTERVAL FRCM T=0 TO T= 1 W THEC CONTINUATION PROCESS.C CQUNT=COUNTER FOR THE # CF TIME STEPS ADVANCED INC THE CONTINUATION PROCESS.C CON=THE CONDITION FOR REACHING T = lC FCN=A SUEFOUTINE USEC BY 1HE IMSL ROUTINE ZSCNT.C WK.NS1G , ITMAX,IER,FNCRM=PARAMETERS IN THE ROUTINEC ZSCNT.C IE, I A=PARAMETERS IN THE ROUTINE LE0T1F.C CTR=COUNTER FOR PLOTTING THE CURVESC JsRECON=REFE T.ITION CCUNTER.C£************* 4 44 ********* * 4******************* **** ******CC INPUT ATTRITION CCFF IC IENTS, C OUNTERS AND FLAGS.CQ*****4 4** **** * 44 ***** ******* ********** 4** ********* ******C
All, 1)=1.CD0
89

Alii 2i=C.3D0A12, 1J=0.6D0A(2, 2J=0.9Q0E(l, 1)=0.15D0E(li 2J=0.3Q06(2, 1J=0.15D0E(2, 2)=0.3D0C(l, 1J = 1 ,2000C{1, 2J=1.0C0C(2, 1J=1.10C0C(2, 2i=0.£C0Dili l)=O.OCQ00(1, 2J=0.0D0D(2 t 1)=0.00000(2, 2J=0.0DCU(lJ =0.300U(2J=C.3D0U(3)=0.1D0U(4) = C.2D0N=4T(1)=0.0Q0T(2J=C.OD0T(3J =C.0DQ7(4) =0.000CCUNT = 1
CC0UNT=0PGN=1IER=0IREP=1fsRECQN=0
C£************************* *********************$*********C CALCULATE R VECTOR USING ONE POSITIVE EQUILIBRIUMC SOLUTION OR MODIFY R VECTOR AS APPROPRIATE.Q************* *******************************************C
X(1J=0.6153SD0X(2)=Q. 384600X(3)=3.0769DCX(4) =0.S231C0R(l)=X(l)*(Ull)*A(l, lJ*X(3)+A(l,2)*X(4))+B(l,li
£*X(3 )*B( 1,2J*X(4)F(2)=X(2)*(U(2J*A(2,lJ*X(3) + A(2,2)*X(4))-fB(2,U
&*X(3 )*B(2,2)*X(4 J
Rt3J-X(3i*(U<3i*C(l f l)*X(mC(2 t li*XUJ)+C(l, 1J&*X(1 )+D(2,l)*X(2 )
P(4)=X(4)*(U(4)+C(1, 2J*X(U+Ci2,2J*X(2)J+D(l,2)
RC ,13, • ) =
£<X(1 )+D(2,2J*X(WRITE (1.9 99 8 J (I, X(I) t IfR(I) » 1 = 1, 4 J
9998 FORM^T('0S3X,«X( ' il3,* J=* ,F 12.4 ,4X,&F12.4)
C£******************<*************************************CC kHILE IREF (ThE CODE FOR REPEAT1NT ) IS l.THE CGNT-C INUATICN FRCCESS WILL BE REP EAT EC. EACH REPE TITIONC WILL INCREASE TS IN MULTIPLES OF 0.005.C£***** **** ***********************************************c7 IFC.NOT. (IREP.EQ.Ui GO TO 8
NRECCN=NFEC0N+1C£************** *********** *******************************C SET TRIVIAL SOLUTION£***** **** ***********************************************C
90

X ( 1)=-C. 10C00D0/1 .20000X (2)=- COO ODD 0/1. 100 00X (3) =-C.30C0/l. 00000X (4)=-C.C000/0. 30000t (i)=cccoT(2)=C.CD0T(3)=C.0C0T(4) =C.CDQCHFLAG = CQCOUNT=0R0N=1EPFLAG=CREFLAG^GC0UNT=1I ER=0CTR=1TS=UFLCAT(NRECGN) *0. 00500CON=IDJM( (1. OCO-TUJ )/TS)+2
C£************* *******************************************C fcHILE T<1 OR CORRECTOR STEP DOES NOT RETURN WITHC ERRUR FLAG IER********************************************************c
cIF(.NOT.((IER.NE. 129) . AND. (IE R .NE . 130 ) .AND.
£ ( IER.NE. 131). AND. (COUNT. LE.CQN))) GO TO 6CC TREAT THE SINGULAR CASE IF REFLAG OR ERFLACC IS SET.C
CALL TREAT (REFLAG, ERFLACCHFLAG)CQ* ********************************************* **********C PREDICTOR STEP:C SET UP THE SET OF DIFFERENTIAL EGUATJCN ANDC CALL LEGUF TO SOLVE THE SYSTEM AX=BQ***** ********************************************* ******c
00 101 1=1, MMEP(1)=(R(1)-6(1,1)*X(3)-B< 1,2)*X(4))*DELEP(2)=(R(2)-E(2,1J*X(3)-B(2,2)*X(4))*0ELBF(3J*(R(3J-D< 1,1)*X(1)-C(2,1)*X(2) )*JELEF<4)=( R(4)-D( 1,2)*X(1)-D(2,2)*X(2) )*DEL/3Pll,l)=U(l )+A(l,l)*X(3 )+A( 1,2) *X(4)AF( 1,2)=0.0C0AP(1 ,3)=A(1 ,1)*X(1)*B(1,1)*T(1)AP(1,4) =A(1 ,2)*X(1)*B(1 ,2)*T(1)AP(2,1)=O.OCOAP(2,2)=U(2 )+A( 2,1) *X( 3) +A( 2,2) *X( 4)AP(2,3)=A(2,1)*X(2)+B(2,1)*T(2)AP(2,4)=A<2,2)*X(2)+B(2,2)*T(2)AP(3,1)=C(1 f lJ*X(3)+0(l ,1)*T(3)AP(3,2)=C(2 , 1)*X(3)+D(2 ,1)*T(3)AP<3,3) =U(3 )+C(l,l)*X(l )*C(2,1)*X(2)AP(3,4) =0.000AP(4,1)=C(1 ,2)*X(4)-*D(1 ,2J*T(4)AP(4,2)=C(2 ,2)*X(4)+D(2 , 2)*T(4)AF(4,3)=0.0C0AP(4,4)=U(4 )*C( 1,2 ) *X (
1
)+C( 2,2) *X( 2)CALL LEGT1F (AP,M,N, IA, B P , IDbf ,WKARE A ,IE
)
CO 102 K=1,NX(K) =BP( K)+X(K)
102 CONTINUE101 CONTINUECQ***** ******** * ******************************************C CORRECTOR STEF:
91

£************* <4*****************************************c
CALL ZSCNT {FC N fNS J G» N , 1TMAX, T , X ,F NCRM , kK , I ER)GM A A=2 5 C.0D0*DM IN 1(DX( U,DX(2i ,DX(3),DX(4JJ
C COMPUTE DIFFERENCE BETWEEN PREVICUS AND CURRENT XC
DO 104 K=l .NCXKJ=DABS( XT(K)-XIKJ)
104 CONTINUECC CALL SUBROUTINE TO DETECT FAST CHANGING COMPONENTC
CALL DETECT(DX ,REFLAG, ERFL AG
)
CC^***** **************************************** ***********C COMPUTE ERROR IF T IS NEAR 1.0Q* ************************************************* ******C
IF(.NGT.(DABS(T<1 J-l.OCO) . L E.O . 0005D0 J J GO TOL 1031
Fl=-X(l )*CU(1)+A(1,1J*X(3H-A(1,2)*X<4JJ£ •»R(1)-BU,1 J*X(3)-BU,2 i*X(4)
F2 =-X<2 J*(U l2)*A<2t l)*X(3J*Ai2i2)*X(4J)L -*R(2J-B<2,1 )*X(3)-B(2,2)*X<4)
F3=-Xi3 i*<U 13J +C (1
,
1J*Xm + C(2, 1)*X(2J J
£ *R(3i-Dilfl J*Xil)-D(2 f 1)*X(2JF4=-X(4 1*(U(4J+Ccli 2J*X(1J+C(2f 2i*X( 2JJ
£ +RI4J-DI1.2 )*X(1J-D<2,2 J*X(2)ERR=CSQRT(F 1**24F2**2+F 3**2+F4**2)fcRITEU ,997)T(1),ERR
1031 CONTINUEC£***** **** ************************************ ***********C OUTPUT V^LUE OF X VECTOR WHEN T IS NEAR 1.0£***** **************************************** ***********C
IF(.NGT.(T(1J.GE. (0.99D0)) JGO TC 865kRITE( 1,955 JT(1)loBlTECl ,999 J <K,X(K) ,K=1 ,N)
865 CONTINUEC£***** **************************************** ***********C CHANGE DOUBLE TO SINGLE PRECISION FOR PLOTTINGC************** ******************************************C
TA(CTR)=SNGL(T Hi i
XA(CTR)=SNGL(X(U J
XB(CTR)=SNGL(X(2) J
XC<CTR)=SNGL(X(3J )
XD(CTR)=SNGL(X(4; )
C0UNT=CCUNT+1CTR^CTR-aGO TO 5
6 CONTINUEC£********* ************ ***********************************C COMMENCE PLOTTING ROUTINEC***** ********************************************* ******c
C/5LL TEK618C CALL C0MPR3
CALL F*GE(14.0,10.5)CALL NOBRDPCALL 6L0WUP(0.4JC4LL AFEA2DU2.0, 8.0J
92

8
CALL XNAMECTIME IN SECS$*,100)CALL YNAME(« XUJ $», 100JCALL XNONUMCALL YNONUM
CC INPUT HEADING IF REQUIRECCC CALL HEADIM 1 INPUT HEADING HE RE*****************C ilOOtl.t4JC CALL HEADINi • ***********AND H ERE** ******** *****$•C ,100,1. ,4)
CALL HEADINl • *********AND HERE******** •• 100, 1 . ,4JCALL HEAGIN1 * *********AND HER E******* ********
•
C ,100,1. ,4JCALL GFAF10.0 , • SCALE* , 1.00 ,-56.0, • SCAL
E
1 ,3 5. J
CP1=CTF-1CALL CUKVE(TA ,XA, CP1,-1JCALL CURVE(TA,XE, CP1,-1)CALL CURVE(TA,XC,CP1,-1JCALL CURVE(TA,XD,CP1,1)CALL ENDPL(O)WRITE U,9910J
9910 FORMAT (•0« ,3X , 'ENTER 1 TO CON TINUE ' ,3 X ,• OTHER NO.6 TO STOP'J
READ( 5,*JIFEPGO TO 1
8 CONTINUECALL CONEFLSTOP
955 FORMAT( •0 , ,3X, I T = * ,024.12)99 7 FORMATS «0 ".ax, 1 T = « ,0 24. 14.3X , »ERRGR= ,D24.6)999 FORM AT (• 0« , 3X ,• X (
• , I 3 ,« i = *f 024. 1 4/
i
END£********* **** * **** ************************************ **CC SUBPROGRAM FCN REQUIRED EY THE ROUTINE ZSCNTCC***** **************************************** ***********
SUBROUTINE FCMX,F,N,TJINTEGER N,I,J,NNREAL * 8 >,F,R,U,A,B ,C,D,TCIMENSION X(4),F<4).T(4JCOMMON /FEFLEN/ R(4iCOMMON /PARAM/ A < 2 ,2 ) ,B < 2 ,2) ,C( 2 ,2i , C (2 , 2 ) , U ( 4 )
F(l)=-X(l)*(U(lJ*A<l,lJ*X(3)+A(l,2J*X(4i)^(R(lJ£-B(l,l)*Xi3i-e(l,2J*X(4i)*T(l)F(2)=-X(2)*(U<2)*A(2,l)*X(3J*A(2,2J*X<4n+(R<2)
&-B (2, 1)*X (3 )-E{2 ,2 J*X44 J )*T< 2)F(3)=-X(3)*(U<3)+CU ,lJ*xm+C(2,l)*X(2n+(R(3JC-DU ,l)*X(li-0(2,li*X(2) )*Ti3iF(4)=-X( 4J*(U(4i+C(l,2J*X(lJ+C(2,2J*X(2)j4(R(^j
6-D(i ,2)*X(1J-0(2,2J*X(2) )*T14)FETURNEND
CQ***** ********************************************* ******cC SUBROUTINE TO TREAT SINGULAR CASE. WHEN EITHERC THE "REVERSE" FLAG.REFLAG CR THE ERROR FLAG,C ERFLAG IS SET , THE P/Wl* ^ INTERVAL, TS MLL BEC INCREASED. IN AUD1TI0N.IF REFLAG IS SET, THE FASTC CHANGING COMPONENT WHICH HAS BEEN FOUND NOT TOC FLIP CORRECTLY WILL HAVE ITS SIGN CHANGED.
cc************** * ****************************** ***********
CSUEROUTINE TREAT( P EFLAG, ERFLAG ,CHFLAG
J
93

REAL * € X7,X,7 f TS,GMAX t XFTEMP,SUA'INTEGEF K,N, COUNT . CON ,FAS T ,QC CUNT .RON , SIGN , I ER
COMMON /TFEPAR/ XT (4 J ,X I 4J , T ( 4) , IS .F AST , CON , COUNT ,N6,ONAX,QCOUNT,PON ,XFTEMP,SUM, SIGN , IER
DO 10$ K=1,NIF( .NOT.( ( (REFLAG.NE. 1 ) .AND .( ERFLAG .NE . 1) J
&.QR. (CHFL/G.EQ.l )
J
i GC TG 10T(K) = T(IO + 7SXT(K) = X(KJ
CC IF NEED TC SET X (FAS 7 J=-XT( FAST J £ ERFLAG IS SETC10 IF(.N07.((REFLAG.EC.1J -AND . ( ERFLAG . EQ. 1 J J J
£ GO 7C 11> (FAS7)=-X7( FASTJ>7(FAST)=X(FAST)If {.NOT. (CHFLAG.EQ.OJ) GO TO 1011
T(K) = T(K J+TST(2i=T(l i
T(3J=T(2 J
T(4i = T(3)TS=2.0D0*7SCHFLAG=1
C T(K)=7(K)+TSCON= IDINTU 1.0D0-T( 1 ))/TS)+3C0UNT=1
1011 CCNTINUEPEFLAG=0ERFLAG=0
GO 70 2CCC IF ONLY ERFLAG I S SE
T
C11 IF( .NOT. (ERFLAG. EQ.l) J GO TO 12
IK. NOT. (ChFLAG.EU.OJJ GOTO 1012Ii(K)=T(K)+TST(2J=T(1 I
T(3)=T(2)T(4)=T<3 J
TS=2.0D0*TSCFFLAG=1
C T(KJ=T(K)4TSCON* ID INTU 1.000-m J i/TSi+3C0UNT = 1
1012 CCNTINUEREFLAC=0EF.FLAG=0
CC IF ONLY PEFLAG I S SETC
GO 70 2012 IF( .NOT.iREFLAG.EU.U J GO TO 20
X(FASTJ=-XT(FAST J
IFUNOT. (CHFLAG.EQ.O)J GO TO 1013T(Ki=T(K)+TST(2J =T(1JT(3i=7(2)T(4J=T(3)TS=2.0DO*TSCHFLAG=1
C T(Kl=T(KmSC0N=IDIN7(( 1.000-7(1 J )/TSJ*3C0UNT=1
1013 CONTINUEREFLAG=0EPFLAG=0
20 CGA7INUE
94

109 CONTINUERETURNEND
CC*** ****** ************************************ ***********cC SUBROUTINE TO OETECT FAST CHANGING COMPONENT OFC X.UPON FETURNINGTC MAIN PROGRAM, THE FLAGS ERFLAGC AND REfLAGhILL BE SET IF ANY SUCH COMPONENTI
S
C DETECTECC^***** ********************************************* ******C
SUER0L7INE DE TECT ( CX , REFL AG, ERFLAG )
REAL * 8 OMAX ,XFT EMP , SUM, XT . X , CX ( 4 ) ,TS ,TINTEGEF K,CCOUNT, FAST , RON ,SIG
N
,REF LAG , IER, ERFLAG6 , N, COUNT, CCN
COMMON /TREPAR/ X T (4 ) ,X( 4 J ,T ( 4 J , T S , FAST, CON, COUNTL ,N,0 MA X.QCOJNT, RON, XFTEMP,SUM,SIGN,IER
CC IF DX(KJ > OMAX FOR 10 TS ,THATCOMPON ENT IS CHANGINGC FAST.C
00 105 K = 1,NIF(. NOT. (DX( K).GE. OMAX) ) GO TO 1014
IF*. NOT. I QC0UNT.GE.10 )J GO TO 1015FAST=KXFTEMP=X(FAST)R0N=2QCOUNT =
1015 CONTINUECCCUNT=QC0UNT+1
1014 CONTINUE105 CONTINUECC IF X(FAST J=-XT(FAST) i»HEN FLIPPING, SET REFLAGC
1F(.NCT.(RCN.NE.1 J) GC TO lOlfcSUM-XT { FAS 7 J +X I FASTIIF( .NOT.(( CABS 4X1 FAST) ).LE .(0.2C0*0ABS
L (XT(FASTJ) J J .0R.( IER.GT.O) ii GC TO 1017IF( .NOT .( (DABS* X (FAST}) .LE. (C.3DC*DAES
£ (XT(FAST) )) ).ANC.( IER.GT.O) )) GO TO 30SIGN = IDI NT ( XT (FA ST) /X( FA ST))IF(. NOT. (SIGN.LT.O) ) GO TO 10 21
REFLAG=11021 CONTINUE
IER=0ERFLAG=1
CC TO 4030 IF (.NOT. (DABS(X(FAST)) . LE. ( .3D0*DABS
L (XT(FAST) )) ))G0 TO 31SIGN=IUINT(XT(FAST)/XFAST) )
1F(. NOT. (SIGN. LT.O) J GO TO 10 2 2
REFLAG^l1022 CONTINUE
GO TO 4031 1F(. NOT .( IER.GT.O)) GO TO 40
IER=0EPFLAG=1
40 CONTINUE1017 CONTINUEiOlfc CONTINUECC IF NO COMPONENT IS ChANGING FAST, BUT THERE IS ERRORC FRCM ZSCNTC
95

10 20
IF(.N07.( (RONiEP=0EFFLAG=1
CONTINUERETURNEND
.EQ. lJ.AND.i IER.GT.O) )) GO TO 1020
96

APPENDIX D
DERIVATIONS OF THE BELATIONS BETHEEN £ , £, AND STABILITYx y
1. Neutral Stability
In this case, e = e = and equation 4.5 reducesx y
3
to
n!(x-xcl ) + Cxy-x
clyel ) + ^(y-y^) = o
It follows that both sets of hyperbolas merge into ore and
all the points on the common hyperbola are equilibrium
points. The lefthand side of the second condition in equa-
tion 4.4 can be manipulated as follows
(u+aye ) (v+cx
e) - (b+ax
e) (d+cy
g )
= ac [(vy e)(u
2+x
e ) - Cy 1+x
e)(n
2+y
e )
= ac
=
[xe(n r n
2)
+ye (w 2" v
l]
+ nlu2
n^y2 M1
This result implies that the constant term of the character-
istics polynomial D(s), is zero ; hence one of the eigenva-
lues, sxequals to zero. Factoring out the characteristic
polynomial, we get the other eigenvalue as
(u+aye
) + (v+cxe )
a(n1+y e ) + c(y
2+x
e )
(eqn D.l)
97

For points on the first quadrant hyperbola, x e > -u, and y
> -rj1
; therefore s < and neutral stability exists.
Conversely, s2
> on the third quadrant hyperbola which is
therefore unstable. The results are summarised as fellows :
(1) Khen £x
= ey
= 0, infinitely-many equilibria
exist as points en the two hyperbolas on which x = y =
C;
(2) The first quadrant hyperbola is neutrally stable;
(3) The third quadrant hyperbola is unstable.
2- Intersections in First and Third Quadrant
The proofs for the following results ace given in
this section :
(1) when both equilibrium points are on the first
guadrant hyperbolas, one is stable and the other
unstable
(2) when one equilibrium point is on the first guad-
rant hyperbola and the other on the third, both can be
unstable or one will be stable and the other unstable.
The straight lines given by equation 4.7 are plotted
on the e x , e plane as shown in Figure D.1. It also shews
the corresponding regions on the ev , e„ plane as x „ and y „X Y e 2 e 2
vary.
let (x el , y , ) be the first equilibrium point on the
first guadrant hyperbola. The first stability criterion in
equation 4.4 is automatically satisfied since
(u+aye
) + (v+cxe )
= a ^! +y e )
+ c ^2+x
e )
> for xe2
> -y2
and Yq2 > -r^
98

ey.
V _=-«' e2
*— V = +oo /J e2
'
-x ,=-u,'
e2 Kl/
eZ
/ x -=0e2
^
/s
/
iss
X -,= +oo
e-/
y
s
ss
y ->=+o°
/7 e2
X _= -oo
e2
ye2
X = +o°el
1 1 '*x' e2 1
Figure D.1 Effect of Varying x _ and y on e , e Plane.e 2 e 2 x y
Consequently, the stability of (x , y ) is solely deter-
mined by the second condition in equation 4.4. The second
condition can be rewritten in the following manner :
(u+ay )(v+cx ) - (b+ax )(d+cy )J e e e e
= ac xe
( n1-n
2) + ye (u
2-u
1) + y
1(n
1-n
2) + n-
L(u
2-M-
L)
j
c[ "S^e^l 5 + ^l^e']= a
or £ < £y > xJ u
(eqn D.2)
99

For (xel# F el)f
equation D. 2 represents the boundary
line of stability and this line has a slope between n n /(x1 el
+ U-j) and (y el+ n
1)/U
1- It is shown in Figure D.2.
I
I ^ /
'/ •••-'
/V < ^//.slope- xr^p^
Ai
k^'slope =
Tv^IT
^e, /slope = (V>-el )
Figure D.2 Boundary line of Stability on e - e Plane,"* x ' y
To investigate the stability of {x , yo9 ),
ite them .
for stability as
e2' Je2substitute them into equation D.2 and obtain the condition
u
s (P! +xel )
(eqn D.3)
100

Eguations D.2 and D.3 are only different in the
directions cf inequality. This means that on one side of the
line e £x (
n]_
+ ye i )' ( u i* x ei) ' one equilibria hi point is
stable and the other is unstable. On the other side of the
line, the opposite conditions exists.
Note that (xe 2* y e2 ) maY or ma Y not satisfy the
first condition of ecuation 4.4. This condition is
a(T»1*y
e2 )+ cCWi+e^x 2 ) > (eqn D.4)
From Figure D.1, equation D.4 and earlier results the
following deductions can be made
(1) In the first quadrant of the e , e
*e2 > "V ye2> " n
i:
plane, e x> 0,
hence equation D.4 is satisfied,
in Figure D.3 is stable forThe region labelled
(Xe2' Ye2 ) iUt unstabiefcr ( xe i' Ye 1 ) ;
(2) In the third quadrant of the ey
plane tut
between the two lines wheree2
> and y „ > -ne2
equation D.4 is again satisfied. The region labelled
« is also stable for (X , y ) but unstable for& \w\
(xel' *ei> ;
plane, x e2(3) In the second quadrant of the
fied ; so both (x 1# Yel ) an<^ ( xe 2' ^2' are unstab le
Ihe region is labelled
< -n and e < 0, equation D. 4 is not satis-e2 1 x
in Figure D.3
;
(4) In the fourth quadrant of the e , e plane, equa-x y
tion D.3 is not satisfied ; so (x ~, y ~) is unstable1 e 2 * e 2
but (x el , y e i) ^- s stable. This region is labelled
in Figure D.3;
equat ion D. 3 isi**|
(5) In the region labelled
not satisfied ; so (x e2 / Y e 2) ^ s unstab le ^ ut (xei
'
y ) is stable.
101

K el' ' e]/unstable;(xe2 , ye2 )
stable
^2)^ as above
E®e botn"* unstable
H
el' ' el J
stable;
e2' 7 e2^
unstable
as above
r „ (ni%PE = £7 ^V^
Figure D,3 Regions in £ , e Plane-
By carefully roting the signs of (xe2 * Ye 2^an ^ t^ e
various regions in Figure D.3, all the previous deductions
can be combined ; we conclude that :
(1) When both equilibrium points are ou the first
guadrant hyperbola, one is stable and the ether
unstable;
(2) When one equilibrium point is on the first guad-
rant hyperbola and the other on the third, both can be
unstable or one will be stable and the other unstable.
102

3 • Two Equilibria in the Thi r d £ua dr an
t
The simplest way to show that both equilibrium
points in the third quadrant are unstable is t o refer to
Figure D.4. Clearly, we must have x < - v/c and y < - u/a
for toth equilibriun points. In that case, the first
stability criterion in equation 4.4 is not satisfied since
(u+ay ) + (v+cx ) <
Therefore, both equilibria are unstable,
a
Figure D. 4 Two equilibria in the Third Quadrant.
4 . Rep eat ed Equilibri a
This case corresponds to operating exactly on the r
£ (y ,+ n,)/(* .
+x el 1 el
u_J on the plane. The proof is
obtained by substituting x n =x, , y = y , into equation2 3 e2 e 1 * e 2 'el
4.6 and solving for e •
103

£ vye2 ' yel' -T (x
el+^l 3
xe2
= xel
=r- ^el
+ nl
}
Rewriting eguaticn D.5, we have
- n
(eqn D . 5)
Vel = £yXel
+ MlEy
" nlCx
y el x y el 1 x 1 y
subtracting one from the other,
2e y . = 2e x . + 2u,e - 2r\.cx J el y el 1 y i x
e = E LSI 1 (eqn D.6)y x
C*.i**i>
Ihus we have shown that the case of repeated equi-
libria corresponds to points on the straight line indicated
in Figure D.3.
Equation D.6 can be also obtained by setting the
second stability criterion egual to zero ( see equation D.2
). lhat is equilavent to saying one of the eigenvalues, s,
is egual to zero. The sign of s is determined by consid-
ering the first stability criterion. Following the same
argument as in neutrally stable case, we can prove that
repeated equilibria on the first quadrant hyperbclas are
neutrally stable. On the other hand, repeated equilibria on
the third guadrant hyperbolas are unstable.
104

APPENDIX E
RELATION BETWEEN STABILITY AND e , e PLANE: VERIFICATIONSx y
Seme representative points on the e , plane arex •
y
chosen and the corresponding stablities of the equilibria
calculated. The points chosen are marked F, G, H, M, N, P,
Q, T and W in Figure E.1.
W
H/
/
U/
/
/
/
/
/
/G,'
/
/
/
N
M
•Q
Figure E. 1 Experimental Verifications
105

1- Procedure
Having chosen the points on the £ x ,£y plane, we
have to work backward to obtain a, b, c, d, u and v.
Suitable (x . , yel ) are then chosen, followed by a calcula-
tion cf i, s, x and y . (x , y ) can be obtained
directly from equation 4.6. From all these parameters, the
eigenvalues can be calculated and results compared with
theory.
2 . Bes ult s
The results are tabulated in Table VII. They agree
with the theoretical results given in Figure E.1.
106

MUcd
EV
ccj 0)
•H HU 3
4-> XI enrd •H •H
e.H•rH
01 3 0) CNIX tr Q) •
d U) ^
<N m r^ O H ID ID O• • • • • • •
•
>1 .H rH O O Hu ' 1 1 1
0)
<N T .m O M 04 m OO O rH
1
O1
O1
rH
0) <N3 0)
H >i <ne rd ro H m m P» CM in3 > U •. O O rH O O O CN O
o•H
.|C0) U-i <N O O ** O O en O
X en 0) 1 1 1
cd H X21 <U
*-*
U•H
•H<n m ID
<* r-l rH O CN f« O(N0) O H ^ <T> O v£5 <3* rH
t—
1
> >. 1 1 1
1—
1
> rH
1- ci ro CO
W c CN "<T CN r-l • <N O V O-JPQ<
X•
(N
•
H OHH
1
• «
O1
«
CN1
H
H
0)
3rH
Uh H > ^r rH CN CO P- <£> co
o S rrj H rH ro H rH CN O3 > M %»
(/) E C O O O O O O O4_i -H <D <4-i H 1 1 1
r—
1
X Cn 0)
3 1 0)
X
<D
«:
0)
CO
oon
o
0)
in m CN OCN
* 0)
c cX CO
<x) rHH CUc•H ai
x: >>a. j-» u
Cm C* O Cm
107

cC APPENDIX FC PROGFAM TO PLOT TRAJECTORIES IN 1*1 SYSTEMSCCCC£***** ******** * ******************************* ************C PROGRAM I1PL FORTRANC THIS PROGFAM fLOTS THE TRAJECTORIES OF A 1*1 SYSTEM.C IT CALLS AN IMSL ROO TIN E ,DVERK FOR INTEGRATION.C eEFOFE E>£CUTION , DETERMINE THE SCALE OF THEC PLOT AND NUMBER OF CURVES REGU1RED.C THE VALUE , "STEP" IS DETERMINED EY THE RANGE OVERC fcHICH WE VAH1 TO SET THE INITIAL POINTS. CHECK A,B f
C CtDiANO U(2).FIX EITHER XUJ OR X(2J AND VARY THEC 0THEF;THE ONE FIXED HAS TO BE RESET AFTER EACHC CURVE HAS BEEN DRAWN. IT IS RESET IN THE LASTC ASSIGNMENT STATEMENTIN THE DO LOOP. TO EXECUTE,C ENTER "I1FL".THE EXEC FILE,"I1PL EXEC"C MUST EE IN THE DISK.IT MUST BE EXECUTED ON AC TERMINAL ATTACHED TO THE TEKTRONIX 616.£*************** ****************************** ************ccQ********************************************* ************C VARIABLE CEFIMTIONSQ***** ***************************************** ***********C >=VECTOR OF LENGTH 2 CONTAINING ThE UNSTAELEC EQUILIBRIUM POINT.C A,B,C,D,U,R=ATTRITION CCEFFIENTS.C CAPX,CAPY,CAP1X, CAPIY^ARRAYS USED TO STORE X"SC FOR PLOTTING PURPOSES.C CEL= INTEGFATICN STEP SIZE.C IND, CC, W,TOL,TEND=PARAMETRS REQUIRED BY IMSL FOUT1NEC DVERKC IER=ERROR MESSAGE NUMEER FRUM DVERKC 01R=CONSTANT FACTOR DETERMINING THE DIRECTIONC OF PERTURBATIONS FROM THE UNSTABLE POINTC FCN1=EXTERNAL FUNCTION REGUIRED BY DVERKC NSTEP=NUM6ER CF CURVES TC PLCT;ALSO § OF STARTINGC STEP=INTEFVAL BETWEEN DIFFERENT1 N1TI AL POINTS.C INTEGRATION PCINTS.C K,KMl^COUN7ERS FOR PLOTTING ROUTINEQ***** ******************************************** ********C
INTEGER N,IND,NW , I ER ,K, NPOINT ,KM
1
,KK , J J , K 1, K2 ,KM2INTEGER N,INO,UW #IER ,K , NPOINT , KM1 ,KK , J
,
NSTEPPEAL * 4 X<2),CC<24J ,M2,9) ,
T
,TOL ,T END ,D EL,R < 2 ) ,A,B,SC,C,U<2J,CAPX(10 00J, CAP Y( 1000 J ,X A( 10 00) , XEi 10 CO i , STE
P
EXTERNAL FCN1COMMON RtA,E,C,D,UOATA NW/2/,N/2/,T/0.0/,TOL/0.0010/,IND/l/,IER/0/
CC ENTER ATTFITICN COEFFICIENTS HEREC
A = C6000E=0.3000C=1.0000D=5. CCU(1J=0.60U(2) =1.00000
CC ENTER ONE ECUILIBRIUM POINT HERE FOR THE CALCULATIONC OF R VECTORC
X(1J=5.0CCOO
108

X(2)=4.CCCC0pm=xm*(uiii«-A*xi 2))+e*x( 2JF12> =X(2)*lbl2) + C*Xl liJ+C*X< 1J
CC ENTER R DIRECTLY HERE if THEY ARE KNQkN;R£MGVEC THE COMMENT CHARACTERS.CC p<i)=**4*xC p(2)=***<*CC************* < i******************************************C SET PLOTTING PARAMETERSQ************** 444********$************************$******C
CALL TEKilfC CALL CGMFR5C CALL VRSl£C(0,O,O)
CALL PAGEUP. 7, 11.5JCALL NQBRCRCALL CRG<<CALL ELOWUP<0.5)CALL AREA2OU3.7,9.50)CALL XNAME(»TCTAL X FGRCE$«,100)CALL YNANE(« TOTAL Y FORCES', 100JCALL FRAME
CC INSERT HEADINGS WITHIN CLOTES ;REMGVE COMMENTC CHARACTERCC CALL HEAO IN (•*******************************$
»
C £.100 f l.f4JC CALL HEaDJN( • *****************************$•C £,100,1. ,4)C CALL HEAOINC •*********************$«, 100C 6jJ.00i1.i4JC CALL FEAOIN( *#**********************<***<$C C, 100,1., A I
CALL GRAF (-3.000 ,
•
SCALE* ,10.0,-6.00, 'SCALE 1, 1C.00
J
CCC INSERT INITIAL CONDITIONS FOR INTEGRATIONCC
STEP=C.5CCCNSTEF=10X(1J sl.OCCODO 100 J=1,NSTEP
X <2J=-5.00OFL0AT< JJ*STEPK = lDEL=C.01CNF01NT=200
5 IFl.NQT.( (IER.LE. OJ.AND. < IND
.
GE.O ) .ANC . ( K. LE.£ NP0IN7))) GO TO 6
TEND=FLCAT <KJ*DELCALL OVERK (N,FCN1 , 1,X, TEND ,TOL , IND , CC, Nh,W , IER J
C XA(K) = X(1)C XB(KJ = X(2i
WRnE(6,999)IER999 FOP^^'D 1 ,3X, • IER-«, I3J
CAFX1K)=X( 1JCAFYIK)=X( 2iK = K«1GO 10 5
6 CONTINUER M 1 — K — 1
CALL CLRVE(CAPX,CAPY,KM1,3JC
109

C RESET INTEGRATION PARAMETERS AFTER EACH CLRVE.C
T = 0.0I ER=0IND-1X(1J = 1.GC0C
100 CONTINUECALL ENDFL(OJCALL CQNEPLSTOPEND
CC***** ******* ********* ************************************C SUBROUTINE FCN1 RECUIRED BY OVERK£***** ********* ** ********************* ********************C
SUBROUTINE FCN1 i N ,T, X ,XPRIJINTEGER N, 1,JREAL * 4 X(N) .XPRI (NJ,T,R(2J , A,B,C,D,U(2JCOMMON AtAfBt CtC, UXPRI (1 J=-X(lj *(U{ 1)+A*X(2 ) J+R(1J-E*X( 2)XFRI (2)=-Xi2J *(U( 2)+C*X(l)J+R(2J-C*Xl ljRETURN
END
110

cC APPENDIX GC PROGRAM TO PLOT BOUNDARY CURVECccC* ************* i * ************************* ********* *******C PFOGRAM EK1 FORTRANC THIS PROGRAM CETERMINES ThE EOUNDARY SEPERATING THEC COMAINS OF ATTRACTION IN A 1*1 PRUBL EM. BACKWARDC INTEGRATION (NEGATIVE TIME) IS USED STARTINGC FROM AN UNSTAELE EQUILIBRIUM POINT,C BEFORE EXECUTION CHECK A , B, C ,D,
U
( 2) , AND X(2J.C TO EXECUTE ENTER BK1.THE EXEC FILE, n EKl EXEC"C MUST EE IN THE DISK. IT MUST EE EXECUTED ON AC TERMINAL ATTACHED TO THE TEKTRONIX 618.C************************************************** *******cc£**** ********** *******************************************C VARIABLE DEFINITIONSQ***** ***************************************** ***********C X=VECTOR CF LENGTH 2 CONTAINING THE UNSTABLEC EQUI LIBRIUM POINT.C A,B,CtD,U,R = ATTRITION CCEEFIENTS.C CAPX,CAPY,CAP1X, CAP1Y =ARRAYS USED TO STORE X"SC FOR PLOTTING FURPOSES.C CEL= INTEGRATION STEP SIZE.C JNO, CC,W,TCL,TEND=PARAMETRS REQUIRED BY 1MSL ROUTINEC V ER KC IER=ERROR MESSAGE NUMEER FROM DVERKC D1R=C0NSTANT FACTOR DETERMINING THE CIRECTIONC OF PERTUPEATICNS FROM THE UNSTABLE PL1NTC FCN1=EXTERNAL FUNCTION RECUIRED BY DVERKC E=CONSTANTS EQUAL 1.0;FOR SETTING OIRECTION OFC CF PERTUPBATICN TOGETHER WITH D I RC K.K1 ,K2=COUNTERS FOR PLOTTING ROUTINE£***** ******************************************** ********C
INTEGER NiINDiNW 1 1 ER ,K, N POINT, KM 1 ,KK , J J , K 1 ,K2 ,KM2REAL * 4 X(2J ,CC<24) ,W(2,9J ,
T
,TOL, TENO ,D EL, E ( 2 J , R, A, Bfi.CtOtUfCAFXlCOOitCAPYi lOOOJ ,
GCAPlX{IO0CitCAPlY(lOCCJ ,£IREXTERNAL FCN1COMMON RliiCOMMON /F/RA/ A,B,C,C,U(2)OATA NW/2/ ,N/2/,T/0.0/,TGL/0.0010/,IND/l/,IER/0/
£,E/+1.000,4l.OOO/A=0. 7
E = 0. 4
C = 1.00=0. 6U( li=0. 15U12J =0.2
Cc* ************ * *******************************************C CALCULATE a t S VECTOR USING DATA FRCM LP PROGRAMC************* ********************************************C
Xll)=£.70X(2J=3.00RUJ =X(1 )*<UUH-A*X<2 )J*E*X(2)Rt2)=X(2J*lU(2)+C*X( 1JJ+0*X( 1)kR IT E (6, 9998 HI, X( IJ , I,R(I), 1 = 1, N J
9998 FORM AT (• 0* ,3X , X I • ,1 3 ,• ) *• ,F 12.4 ,4X , • P (• , 13, • )=• ,F12 .4
CC***** **************************************** ************
111

C INSERT INITIAL CONDITIONS FOR INTEGRATIONC***** ***************************************** ***********c
Kl=lK2 = l
CO 100 JJ»l f 2CC FOR JJ=1 £ 2, BACKWARD INTEGRATE ALONG ERANCh # 1,2C RESPECTIVELYC
IFC.N07.UJ.EG.1) JGO TO 50DIP=0.03X(l )=X<1J+DIR*E(1)X( 2J=X(2)*DIR*E(2JGO TO 60
50 CONTINUEDIP=-0.C3X( li=6.70+DIR*E(l)X<2^3.G00+DIR*E(2J
60 CONTINUEK = lT = 0.0DEL=0.1001FUJ.EC.2) DEL=0.100NPOINT=200IND-1
CQ***** ********* *******************************************CC WHILE NO ERROR ANC NUMBER OF INTEGRATION STEPSC LESS TH/N NPOINTCQ***** ******************************** ********************C5 IF(.NQT.( ( IER. LE. C i. AND. (IND.GE.O J.AN D.(K. IE.
£ NPOINT) J) GO TO to
TEND=-(FLOAT(KJ*DEL)
i CALL INTEGRATION ROUTINE
CALL CVERK(N,FCN1,T,X,TEN0 ,TOL , IND , CC , N W, W , IER
J
CC PRINT ERXOR MESSAGE IN ANYC
WRIT£(6,999J IEP999 FOF-MATCO 1 ,3X, • IER= , ,I3)CC STOFE X(l) ,X(2) FOR THE TWO BRANCHES OF THEC BOUNDARY IN TWO ARRAYSC
IF (.NOT. (J J.EQ.1J )G0 TC 501CAPXtK) = X(1 i
C/PY<K)=X(2 )
K1 = K1+1GO TO 601
501 CONTINLECAP1X(K) = X( liC^P1YU) = X( 21K2 = K2+1
601 CONTINUEK-MlGO TO 5
6 CONTINUE100 CONTINUECC SET NUMBEF OF PLOTTED POINTS TO ONE LESS THANC THE NUMBEF OF DATA POINTS
112

cKM1=K1-1KM2=K2-1
C£*#*** *$$*$*** <<****-it ************************* ************C COMMENCE PLGTTING THE BCUNDARY
cCALL TEK616
C CALL COMFFSC CALL VRSTEC(0,0,0)
CALL PAG£U4.7 f 11.5)CALL NOBFCFCALL CROSSCALL BLGWUP(0.55)CALL AREA2D<13.7,9.0)CALL XNAMEl 1 TOTAL X FORCES'.IOOJCALL YNANEt 1 TOTAL Y FORCES', 100J
CC INSERT HEADINGS WITHIN QLOT ES ;REMCVE COMMENT CHARACTERCC CALL HEADIN( •*******************************$C &,100il.,4)C CALL HEAD IN( • ****************************<$•C S, 100,1. ,4)C CALL HEA01N( •*********************$•, 100C 6, 100.1., 4)C CALL HEAOINi *******<********************<$•C &,100,1.,4J
CALL GRAF 16.000, •SCALE* ,7.000,0.400, • SCALE* ,4 .000
J
CALL CURVEiCAPX, CAPY ,KMl,2JCALL CURVE(CAflX,CAPlY,KM2,2)CALL ENCFLIOJCALL DQNEFLSTOPEND
Cc* ****** ******* ** ******************************** *********C SUBPROGRAM CALL BY INTEGRATION ROUT I N E , D V ERi<£************* * (u*^*****************^*************^****C
SUBRQUTIfsE FCN1 1 N, T, X ,XPR I)INTEGER Nfl, JREAL * 4 X(N) ,XFRI(N) ,T,R ,A,B,C,D,UCOMMON M2JCCMMON /PARA/ A,B,C,D.U<2)APRl ( 1)=-XU) *(U( I)+A*X(2) )+R{lJ-E«X(2)XPRI <2) =-X<2)*(U< 2i*C*X(lii +R(2)-D*X( liRETURN
END
113

C APPENOIX HC PROGRAM TO OBTAIN PAYOFF MATRIX ANOC OPTIMUM MIXED STRATEGIESCCC£********* ********* $*******$******************************C THIS PROGRAM COMPOTES THE PAYOFF MATRIX ANCC OPTIMUM MIXED STRATEGIES FOR X ANC Y.THE ALGORITHMC IS BASED ON THE THEORY GIVEN lti CHAPTER 5.C THE PAYOFF FUNCTIONS ARE COMPUTEO FCR 60*60 X,YC BUT ONLY 15*15 SAMPLED MATRIX IS PRINTED.C THE OUTPUT ALSO INCLUGES MATRIX FOR LX,LY,ANDC FINTIM.C BY CHANGING ALAMDA TO LESS THAN 1,THEC 0EJECT1VE FUNCTION CAN BE MADE TO EMPHASIZEC MORE OF FINTIM IN ACCORDANCE WITH:C A( >, n= ALAMO A* I LY-LX) * ( 1-A LAMDA J*F INTIMC BEFORE EXECUTIGN, CHECK ATTRITION C0EFF1ENTS,C QX.QY ,/LAMCA,XlS, X2S, STEP 1, ST EP2, CARDSC LABELLED CltC2 ANC SCALE IN THE PLOTTINGC ROUTINE. PERTURBATIONS ARE GIVEN BY CARCSC LABELLED C3 AND C4.C TO EXECUTEfYOU NEEC THE EXEC FILE "LOSCP EXEC"C AND A TERMINAL CONNECTED MTH A TEK618.ENTERC "LOSQF 11 fcHEN READY.£************** 44*4 **************************** ***********CC£************* ************ ********************************C VARIAELE DEFINITIONSQ***** **************************************** ************C X(2J=ARRAY CONTAINING X AND YC X1S,X2S=VARIBLES USED TO SET THE FARTITONSC OF X AND Y VALUES TO CALCULATEC A(X,Y). THERE ARE 60 INTERVALS FOR X ANDC Y IN THE RANGE 0.2Q AND 0.75Q.C STEP1 ,STEP2^T0 OBTAIN THE CORRECT STEP INTERVALC AS DESCRIBED ABOVEC XFRIN1 ,XPRIN2=VARIABLES USED TO SAFEKEEP INITIALC VALUES OF X AND Y
C TX,TY,P,S = AS DEFINED IN CHAPTER 5C RX,RY=(OX-X) , (QY-Y) RESPECTIVELYC XLQSS ,\LOSS=LX,LY IN CHAP. 5C CCtNW, W,TQL, TEND, DEL, IND= FARAMETE PS REQUIRED BYC IMSL ROUTINE, DVERK.C IED=ERROR CODE FRCM DVERK.C ZMAT=M^TRIX USED FCR PLOTTING SURFACE AU.Y).C RATLCS=FAYCFF MATRIXC FINTIM=f INISH TIME MATRIXC RATAVE=15*15 PAYOFF MATRIX FOR OUTPUTC XLOSPR=LX MATRIX FCR OUTPUTC YLOSPP^LY MATRIX FCR CUTPUTC FTPR=FINTIM MATRIX FCR OUTPUTC ROWMIN=ROW MINIMUM IN PAYCFF MATRIXC COLMAX=CQLUMN MAXIMUM IN PAYOFF MATRIXC AXMIN=MAXIMUM OF THE THE ROW MINIMUMC XINMAX=MIN1MUM OF THE COLUMN MAXIMUMC RHS=ARRAY CONTAINING RHS CF CONSTRAINTSC OECOEF^ARRAY CONTAINING COEFFICIENTS OF OBJECTIVEC FUNCTION IN LP.C ALAMDA^NUMeER BETkEEN AHD 1 TO CETERMINEC RELATIVE EMPHASIS CF LOSS AND FINTIMC IN AU.Y)C SMMIN=SMALLEST VALUE OF RCh MINIMUMC PAY=15*15 MATRIX USED TO SAFEKEEP RATAVE ANDC CCMPUTE THE OPTIMIZED STAREGIES
114

C NS1,NS2=DIMENSIQN OF PAYOFF M ATR IX , EQ UALS 40.C NCGO=FLAG TO INDICATE END OF INTEGRATIONC J
J
fKK=lNCICES FOR MATRICESC C0UNT=(OUNTER FCR INTEGRATIONC KKM1=MW8EF OF POINTS PLOTTEDC FCNl,2 f 3f4=SUBRGUTINES REQUIRED BY DVERK;TFEYC CONTAIN 1*1 EQUATIONS FCR TFE VARIOUSC STAGES FOR THE BATTLEC T=TIMEC XA,YA,ZA = ARRAYS USED FOR STORING AND PLOTTINGC XPR1N1,XPRIN2,RATL0S AS DEFINED AtOVEC ZCOUNT=CQUNTER FOR XA,YAC JC=CQUNIER FOR ZAC TIMEl^Tl IN CHAP.
5
C T1 =T2 IN CHAP.
5
C NPLQT=MMBER OF PLOTS REULlRED
REAL X]£,X2S, X(2) ,R,S,RX,RY,TX,TY,CX,CY,A,C,U,V,£ M (2 t 9 I ,T f TOLt TEND , DEL ,XA( 3650 i , YA { 365 C J
,
RATIO& , RATLCS (60,60 ) , XP R INI ,XPR IN2
,
XT1 , XT 2, RGTR ATL , ZMATU0,6C) , ROfeMI N( 60 J ,C OLMA X ( 60 J ,AXJ* IN,XINMAX
REAL F]NAL.FINTIM(60,60),TIMEl.RATAVfc(20,2G)6 ,SMM1N,PAY(17,3 2) , TEMPO, RHS( 1 5 J ,OBCOE F (15 i ,ALAMOA& , XL0SUC6CJ • Yi_CS( 60,60) , FTPR (20 , 20 J ,
& YLOSPP (2 0,20 J ,CC( 24) ,T1, STEP1 , STEP2, Y LCSS , XLOSSREAL YLCXL,ZA(365 0i ,XL0SPR(20 ,20 J
INTEGER 1ND,N W, IE D,K, COUNT, NSTEP,NS1,NS2, J ,NOGO£ , ZCUUN1,NX,NY ,NPUINT , J
J
,KK, JK , JC , KKMlCOMMON /PAPAiM/ A, C ,U , V ,S , R ,B , DEXTERNAL FC.N1EXTERNAL FCN2EXTERNAL FCN3EXTERNAL FCN4
CQ************* < * * ************* ******** ********* ***********C SET PARAMETERS ANO COUNTERSQ************* * *******************************************C
A=0.70C = 1.00U=0.15V = C.2Q0B=0.4000D=C.6Q0ALAMOA=1.00F 1NAL = 0.10NW=2N«2T = 0.0TCL=0.001INC=1DEL=0.C1CQUNT=1QX=10.CCQY=7.CCX1S=3.CX2S^=3.C0JC=0NOGO=CNSl=bCNS2=6CNS=NS1-1ZCOUNT=0NP0INT = NS1*NS2
CQ**************** *****************************************C START COMPUTING 6C*60 PAYOFF FUNCTIONS
115

c* ************ * ***********$******************#<<*********$c
DC 100 J=1,NS1STEFl=(FL0AT(J-NSin/39.33DO 101 K=1,NS2
JC=JC+11*0.0COUNT=lIND-1STEP2=(FLCAT(K-NS2) )/54.42ti
C CARD CI
C CARD C2
C CAPO C3
C CAPO C4
>m=XlS*(2.333*STEPl)
><2J=X2S*(1.S17+STEP2J>FRIN1=X(1J>PRIN2=X12)>4<JU = XPRIMYMJCJ = XPRIN2F = X( U*(U+A*X(2n + B*X(2 J
S=X(Z)*<V-*C*X( 1)J+D*X(1)PX^QX-X(1JR* = QY-X(2J
>(1J=XPRIN1-0.01
XJ2)=XPRIN2-0.05T>=RX/RTY=RY/S
CC************** *******************************************C STAGE 1
C* ******** ************ ************************************C
TEND=0.0TIME1=AMIN1 (TX,TY)
5000 IF < .NOT. < (TEND.LE.TIME1 J.AND,<NQGO.EC.O) ))£ GO TO 6000
TEND=FL0 4T(CCUNT)*DElCALL DVERMN,FCN4,T,X,TEND,T0l,IND,CC
£ ,Nw,W,IED)IF( .NOT. ( (X(1).LE.(FINAL*CX) J .OR. <X(2J
£ .IE. (FINAL*CY)J J ) GO TO 10231F(.N0T.( X<1) -LE. (FINAL*qXJJ )GC TO 52
XLQSS-C.1.-F1NALJ*QXYL0SS=T*S+XPRIN2-X(2)
GO TO 6252 CONTINUE
XLOSS = T*R-*-XPRINl-X(l)YLCSS=(1.-FINALJ*QY
62 CONTINUENOGO=1XLGS( J,K)=XLOSSYLCS( J,KJ=YLOSSRATLOS(J,M = YLGSS-XLOSSFINTIM(J f KJ=TIF( .NOT.(PATLOS(J .KJ.LT.O-OJ JGQ TO 153
SIGN-1.0GO TO 163
153 CONTINUESIGN--1.0
163 CONTINUERATLOS(J,K)=AIAMDA*RATLOS < J,K]*(1.
L -ALA/-»CAi*SlGN*FINTIM{ J,KJ1028 CONTINUE
CQUNT=C0UNT+1IED=0GO TO 5000
116

6000 CGNIINUECC CALCULATE TlC
IF(.NQT.(TX.LT.TY) J GO TO 50T1=TY-TXGO TO 60
50 CONTINUET1=TX-TY
60 CONTINUEC£********************************************** ***** ******C STAGE 2C* ********* *********** ************************ * *** ********C
TENC=0.0T=O.CCQUNT=1IND*1
5 IF (.NOT. I (TEND.LE.Tl).AND.(NOGO.EQ.OJ) )
6 GO TO 6TEN0=FL0AT(CCLNT1*DELIf( .NOT.(TX.LT.TYiJGC TO 51
CALL DVERMN.FCNl , T , X , TENC ,TOL ,IND6 ,CCiNW,w,IEDi
IF(.NOT.UX( 1 J.LE . <FINAL*C>) J .OR.L 1X12) .LE.(FINAL*QY) ) J i GU TO 1C11
XL0SS=CX-X(1)YLQSS=(T*S)*XPRiN2-M2 )*(TX*SJRAT LOS
(
J,KJ=YLCSS-XLOSSXLOSUtKJ = XLOSSYLOS( JtKJ=YL05SFINTIM1 J,K)=TX+TIF< .NOT.(RATLOS(J,KJ.LT.0.0JiGO TO
& 154SIGN-1.0GO TO 164
154 CONTINUESIGN=-1.0
164 CONTINUERATLOS(JrK)=ALAMOA*RATLCS< J ,KJ+
6 CI .-ALAMDAJ*SIGN*FINTIM{J,KJN0G0=1
1011 CONTINUEGO TO 61
51 CONTINUECALL DVERMN.FCN2 ,T,X,TEND ,TQL,IND
L ,CCfNW,W,IEOJtF<.NCT.((Xm.LE.(FINAL*CXn.OR.
L (X<2) .LE.<FINAL*QYn ) i GO TO 1013XLQSS^<T*R J+XPRIN1-M1 )-MTY*R)YL0SS=CY-X(2)RATLOS(Ji K )=YLOSS->LOSSXLQSl JiK) = XLOSSYL0S1 J.KJ^YLOSSFINTIMU,K)=TY*TIF UNCT.( RATLOSUtKJ.LT.0.0 J J GO
& TO 15 5SlGN^l.OGO 10 165
155 CONTINUES1GN--1 .0
165 CONTINUERATLOS<J,KJ=ALAMUA*RATLOSl J,Ki*
£ (1 .-ALAMDAJ*SIGN*FINTIMJ»K)NCG0=1
1013 CONTINUE
117

61 CONTINUECOUNT*COUNT+lIED=0GO TO 5
6 CONTINUEC£********************* ************************* **********C STAGE 2£***** ******** 4 X ****** ******* ********* ****** ******* ******c
1 = 0,0C0UNT=1IND=1
500 IM.NOT.(NOGO.EC.O) JGO TO 6CC1005 CONTINUE
T END= FLOAT (COUNT J* CELCALL CVERK(N,FCN3,1,X,TENC ,TOL ,IND
& t CC iNWtWf I ED J
IF( .NOT. I (X(l).LE. (FINAL* CXJJ .CR.6 ( X(2) .LE.(FINAL*QY) )J ) GO TO 1014
XLGSS=CX-X(1)YLCSS=CY-X(2)RATLOS( J.K)=YLCSS-XLOSSXLQS( JtKi=XLOSSYLOS( J,KJ=YLOSSFI NTIM( J.K)=AMAX1(TX,TY)+TIF ( .NOT.(RATLOS( J , K ) .LT .0 . J JGO
£ TO 156SI GN=1.0GU TO 166
156 CONTINUESIGN=-1.0
166 CONTINUERATLUS(J,K)=ALAMDA*RATLCS(J .KJ +
£ (1 .-ALAMDA)*SIGN*FINTIM(J,KJNOG 0=1
1014 CONTINUEC0UNT=CUUNT+1IED=0
IF( .NOT. ( U(1).LE.(FINAL*CX] J.OR.£ (X(2).LE.(FINAL*QYn ii GO TO 1005
GC TO 500600 CONTINUEC£*** *********** 3j *********************************** ******C END OF eATTLEC********* ************ ************************ ***********c
XA(2CQUNT)=XPRIN1YA(ZCQUNTJ=XPRIN2NOGO=0ZA (JCJ=RATLOS( J,K)
101 CONTINUE100 CONTINUE
C********************************************** **********C COMPUTE ROW MINIMUMAND SMALLEST kCWMINQ************* ******** ***********************************C
DC 301 KK-1.NS1RCWMN(KK) =RATL0S(KK,1)DO 302 JJ=2, NS2
IF (.NOT . (RATLOS(KK, JJJ . LT .RC kiMI N (KK J J J
L 00 TO 1017RCWMIN(KKJ=RATLOS(KK ,JJJ
1017 CONTINUE302 CONTINUE
118

301 CONTINUEDO 305 KJ<=2 ,NS1
IFUNGT.tRGWMI N(KK) .LT.SMMIN) J GO TO 1019SMMIN=RCWM1 N(KKJ
C INSER=KK1019 CONTINUE305 CONTINUECC*4c4C 4t 4[ *41 4t 4t 4,4.4t *444'*****************************4**********C SAWPLE 15*15 MATRICES FROM 60*60 NATRIXC* 4c* 4^4$ ** 44>4<*4444'**** ********************** 4<* ***********C
CG 301 JJ*l f 15J=4*JJ00 3C8 KK=1,15
M4*KnR4T AVE* JJtKKi-RATLGSUi KJPAY(JJ,KK)=RATAVE(JJ,KK)XLOSPRt JJ,KM = XLCS( JtKJ>LOSP«IJJ,KK)=YLCS(J,K)MPRUJ ,KK) = F1 NT IM< J, K
J
308 CONTINUE307 CONTINUECQ 4c******** ****4**** 4* **************** *********44***4*****C OUTPUT MATRICES£***** ********4 4 4****************************************C
WRITE UfSSCJt (RATAVE<JJfKKJ t KK=l t lS)f JJ*l t 15JWRITE ( 1,9814)WRITE (1 ,98 11 J ( (XLQSPR ( J J, KK J ,KK=1 ,15 J nJ=l ,15JWRITE (1,9814)WRITE (1,98 12 i ((YLOSPR (JJ.KK) , KK=1, 15 J , JJ=1,15)WRITE( 1,9814)WPITEi 1,98 13) UFTPRUJ,KK) tKK=l,15i,JJ=l,l£)WR1TE(1,9814)
980 FORMAT ('1» ,15F7.3//J
9811 FORMAT I'l' ,15F7.3//)9812 . FORMAT <• 1« ,15F7.3//)9813 FORMAT t«l« ,15F7.3//)9814 FORMAT CO' ,» • )
C£********** 4*4 4 4****** ***********************************C CALCULATE QP SOLUTIONC ACD AeS(SMMIN) TO ALL -PAY(J,K)TQ WAKE GAME VALUEC PCSITIVEQ4t**** ***************************************************C
SMHIN=/8S(SMMINJ+2-DO 403 JJ=l f 15
RHS(JJ)=1.08CCEF(JJi=l.00 4C-4 KK*1,15
FAY( JJ,KKJ=<PAY( JJ,KK)+SMMIN)404 CONTINUE403 CONTINUECC CALL SUBROUTINE LP TO COMPUTE OPTIMIZEDC STRATEGIESC
CALL LPlPAY,RHS,OBCGEF,SMMINiCQ*4c4e****** ********* 4** ***********************************C PLOTTING ROUTINEC*** **4******* 4*4****************************************C
CALL TEK61E
119

NFL0T=1DO 102 L-l,NPLOT
CALL F4GE< 8.50,11.0)CALL NCEKDRCALL ELCWUP41.0)CALL AREA2D<5.50,7.00)REAC(5,*)XVUWRI7E(6»906)XVURE/C15,*) YVUWR ITE<6,907) YVURE*C(5,*JZVUWRnS(6,908)ZVU
C CALL FRAMECALL SCMPLXCALL XAXANG<45.0)CALL YAXANGC45.0)CALL ZA/ANG(45.0)CALL X3NAME( • X-CEPLOYMENTS ,100)CALL Y3NAME( • Y-CEPLOYM ENT$ •
,
IOC)CALL Z3NAME(«PAYCFF TO X$« ,100)
CC INSERT FEADING IN 4****** ,REMCVE "C"CC CALL HEADIN< , **************«, 100, l.C, 4)C CALL hEAJI N(i**************i
,
100,1,0,4)C CALL hEAJlN< # *************$« , IOC, 1.0, 4)C CALL HE/iDINC************** 1
, 100, l.C, 4)C CALL MES5AG (•*************$• ,100,1.2,C I 7.0)
CALL V0LM3C<1. ,1.,1.)CALL VUABS < X VU , Y VL ,ZVU )
CALL GRAF3D(2. 50, SCALE ' , 7 .000 , 2. 5 ,« SCALE* ,
& 5.75,-5.0, 'SCALE* ,5.000)CALL BCX3DCALL RASPIN(0. )
CALL SUPMAT(KATL0S,1,NS1,1 ,NS2 ,0)CALL ENCPL(O)
102 CONTINUECALL OCNEPL
906 F0RMA7(«0»,3X, 'XVU- 1)
907 FORMAT <i ,Y3X, ,VVU=" )
908 FORMATP0S3X, *l VL-« )
C WRITE (3 ,98e)INSER, INSECC988 FORMAT CO'^X, 1
1 NSER=« , I4,« INSEC=« ,14)WRITE U,967)A ,B,C ,C
987 FORMAT CO 1 ,2X ,• A, E,C,C = « ,4F13.3)WRITEU,986)U,V,aLAM0A
98 6 FORMAT CO 1 ,2X ,«U, V = « ,2F13.3,2X, • L AMOA= , F 1 3.2)C307 CONTINUE
STOPENO
C£*************<******************************************C SUeRCLTINE FCN1Q***** ********************************************* ******c
SUEROUTINE FCN1 (N ,T,X ,XPR IME)INTEGER NREAL X<N) .XPRIMEi N),TCOMMON /PAFAM/ A,C ,U,V,S,R,B, DXPRIME(1)=-X( 1)*( U*A*X<2) )-B*X(2)XFRIM£(2)=-X (2)*( V*C*XU) )+S-C«X(l'JRETURNEND
CC************************************************* *******C SUBROUTINE FCN2
120

£********************* ************************$*******:*$$c
SUBROUTINE J=CN2(N ,T,X,XPRIMEJINTEGEF NREAL X(NJ , XPRIME(M,TCOMMON /PARAM/ A, C,U,V,S,R,B»XPRIMEm=-X( 1)*( L*A*X<2) )+R-B*X(2)XFPIME <2J=-X(2)*< V4C*XU) )-D*X(l)RETURNENC
C£*********$**:(, * <* ***5=* ***************************** ******C SUBROUTINE FCN3Q*********^^**^****^^*************************^********^*c
SUBROUTINE FCN3 (N ,T, X, XPR IMEiINTEGEF NREAL ><N),>PRIME(NJ,TCOMMON /P4PAM/ A. C ,U , V ,S t R t B , DXPRIMEU)=-X( 1)*< L+A*Xi2Ji-B*X(2JXPRIME(2)=-X(2)*< V*C*Xm)-D*X(URETURNEND
C£********************************************************C SLERQUINE FCN4Q«*c*c ******( 9 ****<*** 4************************ *************c
SUBROUTINE FCN4 <N ,T, X, XPR IME)INTEGEF NREAL MN),>PRIME( NJt TCOMMON /PARAM/ A, C ,U , V ,S i R t B ,
XPRIME(1)=-X{1)*( U*A*X(2) )+R-B*X<2)XFRI ME <2J = -X(2)*{ \+C*Xil) )+S-C*X( 1)RETURNENC
CC************ * * t *****************************************C SUBROUTINE LP^* ************ * * *****************************************C
SUBROUTINE LP ( ALP , EL
P
,CLP t SMM IN
)
INTEGEF IALPiNA.Pt Ml f M2#IW<63J iIELPREAL A LP ( 1 7, 3 2i tS LP tPSOL( 15)
,
CSGL(15) ,FW(3E3i ,
& SMMIN,VAL,ELP(15i ,CLP<15JN L F= 1 5
Ml = 15M2=0I ALP=17CALL Z>4LP(ALPtIALP,BLP,CLP,NLP,Ml,M2,SLP,FSOL
£ ,CSOL ,FW,IH, I ELP)VAL=( l./SLP)-SMMINWRITE (1.729JVAL
729 FCRMAT(«Q« ,' VALUE OF GAME=« , F 14.3 J
DO 405 JJ=1,15PSCL<JJ}=PSOLUJ)/SLPDSCUJJ)=DSGL( JJi/SLPWRITE(li73 0iJJtFSCL(JJ),JJ,CS0L(JJ)
730 FOFM^TCO* ,2X, «FRCB OF.STR. # ,t I3 f
,0F V=«£ •F12.3f , PR0B.0F STR. #«iI3 f '0F X=»,F12.3)
405 CONTINUERETURNEND
121

APPENDIX I
TRANSFORMING MIXED STRATEGY PROBLEM INTO LINEAR PROGRAMMING
The payoff function has been defined to be
A(X,Y) = L v- L x
Y selects his optimum mixed strategies which yeild
, r mmV = _ ; max
m m
DijvS* 2^m
amj q
j
L J«i J-i J-i
where
a. . = payoff to x when x adopts ith strategy and y adopts
j th strategy
q. = probability that y selects j th strategy
Subject to :
\ q. = 1, q. > , j = 1,2, . . . ,m
J
A n '
Let Vq - max \talj*y £>2jV" Samj^j 1
Lj-i j.i j-,J J
Then the original problem becomes
minimize v,
122

Subject to :
j
Za2j
qJ
< v
* v
Ea .q.3
< V
= 1
J
Qj > , j = 1,2, . ..,m
Dividing the constants by v~ (> 0) , we have
1m
- Va, -q- < 1
1 v^a2j«j
<*v ^
- Va .q. < 1
= 1
qiLet Q. = —«- and since
J V
rain vQ
= max - = max [Q1
+ Q2
+ . . . + QJ
,
the problem can be written as :
max QQ
= [Qx
+ Q2
+ . . . + QJ
123

Subject to :
Eaij^j > 1
J
^a2jQj
> 1
J
Va .Q.
J
Q. > , j = 1,2, ... ,m
1q
jSince Q n = — and Q • = --—v J v
Qi= = = > q
3
=
V<>=
Qj
After solving the LP problem, the optimum strategies for y
is given by q. = Q. vn
Some constants, K = |min(a..)| could
have been added to a. . to ensure v n > 0. If this is done,l j
'
K has to be subtracted from the optimum value obtained by the
LP, that is
v* - Q Q- K
where v = the value of the game
124

APPENDIX J
BACKGROUND DATA ON KOREAN WAR
2.
3.
4.
a,
B
PERIOD CONSIDERED 25 June 1950 to 7 July 1950(No American ground involvementas yet)
TYPE OF ENGAGEMENT : Predominantly land combat
GENERAL STATE OF READINESS :
NORTH KOREA
REPUBLIC OF KOREA
SOURCE OF DATA
Well prepared by 1950; armsbuild-up and training oftroops since 1945; manymilitary leaders and combatpersonnel were war veteransfighting in China
: By 1950; a small defenseforce began to take shapethrough American aid;training only started around1948.
Appleman, R.E., United States"
Army in the Korean War , Departmentof the Army, 1961
.
b) Montross, Lynn, U.S. Marine Opera -
tions in Korea , U.S. Marine Corps.1954.
a)
RELATIVE STRENGTH
NORTH KOREA REPUBLIC OF KOREA
Total strength = Q = 135,000 men Qv = 95,000 meny
Tanks : 150Artillery pieces : 1,600
Aircraft(i) fighters - 40(ii) attack bombers - 70(iii) reconnaissance - 10
nil700
no combat aircraft(22 trainer, 4
auxiliary; no pilot)
125

6. CORRESPONDING PARAMETERS USED IN MODEL
a = 0.7 c = 1.0
b = 0.4 d = 0.6
u = 0.15 v = 0.2
1 unit = 13,500 men
126

1IST Of REFERENCES
1.
12,
Dolansky. L. , Present State of the Lanch? ster Theorycj Combat , Operations Research Society or America"! VI.334=35F7~196 4.
l
2. Wozencraft, J. M.and [loose, P.H.. Lanchastec Theory an dMatrix Games, Eroc. of the sixth "HIT/OUI WorxsTioj on C*
systemsj December 1983.
3. Siljak, D. 0. , Non-linear Systems, John Wiley & Sons,1S69.
4. Ogata, K., Modern Control Engineering, Prentice-Hall,19 70.
5. Taylor, James G. , Manchester Models of War fare ,
Operations Research Society or America, 198~3.
6. Lanchester, F.E., Aircraft in Warfare : The Dcvm ofFourth Arm No. V., ""THe "principle ol Concentration ,
EngTneerIng~90, TJ22-423, 1914.
7. Strang, I. , linear Algebra and Its A pplica ticn sAcademe Press, T9~7b, pages 319-3"23
8. Pichter, Stephen L., Continua tion Methods : Theory, andApplications, IEEE "Trans. ~ on system, ~~Ean "7AITT5
CyrefneTics", vol. SMV-13, No. 4, July/August 1983.
9. Ohihiro, H. , Non linear Oscillat ions in Phy sica lSystem, Mcgraw Hill, T9X3.
Taha, H.A., Cperat i or.s Research : An In troduc ticn ,
MacMillan, 197T.
Frederick, S.H. and Gerald, J.L., Operations Rese arch ,
Holden-Day, 1974.
Liu, C.L.. Intro duc tion to Combinatorial M athema tics ,
Mcgraw-Hill, TUB.
127



INITIAL DISTRIBUTION LIST
No. Copies
1. lirrary. Code 0142 2Naval Postgraduate SchoolMonterey, California 93943
2. Defense Technical Information Center 2Cameron StationAlexandria, Virginia 223 14
3. Professor Paul R. Moose. Code 62ME 3Department of Electrical andComputer Engineering,Naval Postgraduate schoolMonterey, California 93943
4. Professor John ft. Wozencraft, Code 62WE 3Department of Electrical andComputer Engineering,Naval Postgraduate SchoolMonterey, California 93943
5. Department Chairman, Code 62 1
Department of Electrical andComputer Engineering,Naval Postgraduate schoolMonterey, California 93943
6. Dr. Percy Studt 1
Outsdre (TWF/OM)The PentagonWashington B.C. 20350
7. Dr. William R. "Verry 1
P.O. Bex 55 20Kirtland AFEN.M 87185
8. Cpt Ang Bing Ning 1
Block 5, Normanton Park11-107, Singapore 051 1
Republic of Singapore
9. Staff Officer, Shore Training 1
Naval Training DepartmentNo. 2, Ritchie RoadSingapore 1024Republic of Singapore
128

/
13 5 3 7 5





ThesisA5373c.l
?.' 9327
ThesisA53T3c. 1
Ang
Equilibrium solutionsstabilities and dyna-mics of Lanchester'sequations with optimi-zation of initial forcecommitments.
203327
AngEquilibrium solutions
stabilities and dyna-
mics of Lanchester'sequations with optimi-zation of initial force
commitments.