Embed Size (px)
Citation preview
1
Environmental Performance andIts Determinants in China:
Spatial Econometric Approach
Katsuya Tanaka
IDEC, Hiroshima University
LBJ School of Public Affairs, University of Texas at Austin
COE Seminar
October 20, 2006
2
Presentation Outline
• Introduction of spatial econometrics– Consequences of the OLS under spatial
autocorrelation
– Spatial autocorrelation in dependent variable
– Spatial autocorrelation in residuals
• Application of spatial econometrics– Industrial SO2 emission and its determinants
3
Introduction
4
IntroductionWho cares?
– First Law of Geography (by Tobler)• Everything is related to everything else,
but near things are more related than distant things.
• Examples:– Is your income level likely to be similar to your neighbor’s?
– Are farm practices likely to be similar on neighboring farms?
– Are housing values likely to be similar in nearby developments?
– Do nearby provinces have similar economic trends?
– Spatial data tends to follow the First Law of Geography, and to include spatial autocorrelation problems
5
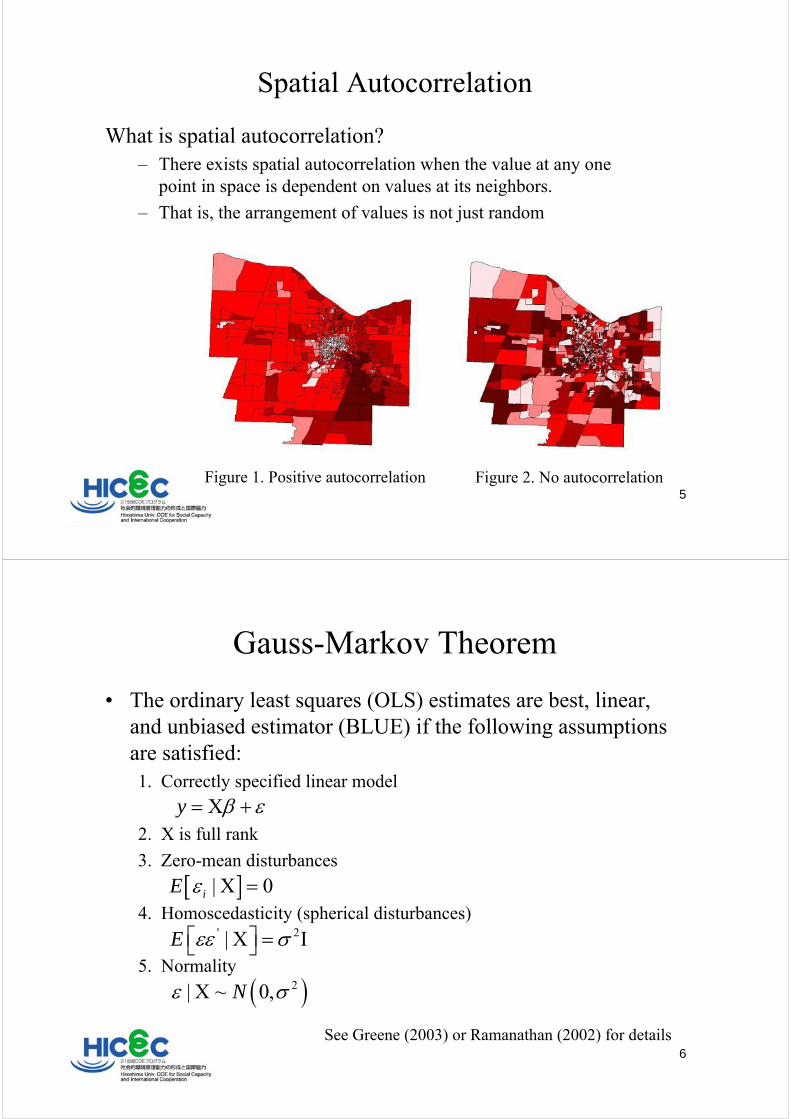
Spatial Autocorrelation
What is spatial autocorrelation?– There exists spatial autocorrelation when the value at any one
point in space is dependent on values at its neighbors.
– That is, the arrangement of values is not just random
Figure 1. Positive autocorrelation Figure 2. No autocorrelation
6
Gauss-Markov Theorem
• The ordinary least squares (OLS) estimates are best, linear, and unbiased estimator (BLUE) if the following assumptions are satisfied:1. Correctly specified linear model
2. X is full rank
3. Zero-mean disturbances
4. Homoscedasticity (spherical disturbances)
5. Normality
Xy β ε= +
[ ]| X 0iE ε =
' 2| X IE εε σ⎡ ⎤ =⎣ ⎦
( )2| X ~ 0,Nε σ
See Greene (2003) or Ramanathan (2002) for details
7
Spatial Autocorrelation
OK. So what’s the matter?– The OLS estimates will not be BLUE due to violation of
assumption under Gauss-Markov Theorem.
– Spatial data is likely to violate assumptions of OLS
– Depending on assumption violated, your OLS estimates are either:
• Inefficient (violation of assumption 4)
• Biased and inconsistent (violation of assumption 1)
– Consequences of the OLS depends on the types of spatial autocorrelation
1. Spatial autocorrelation in dependent variable
2. Spatial autocorrelation in residuals
8
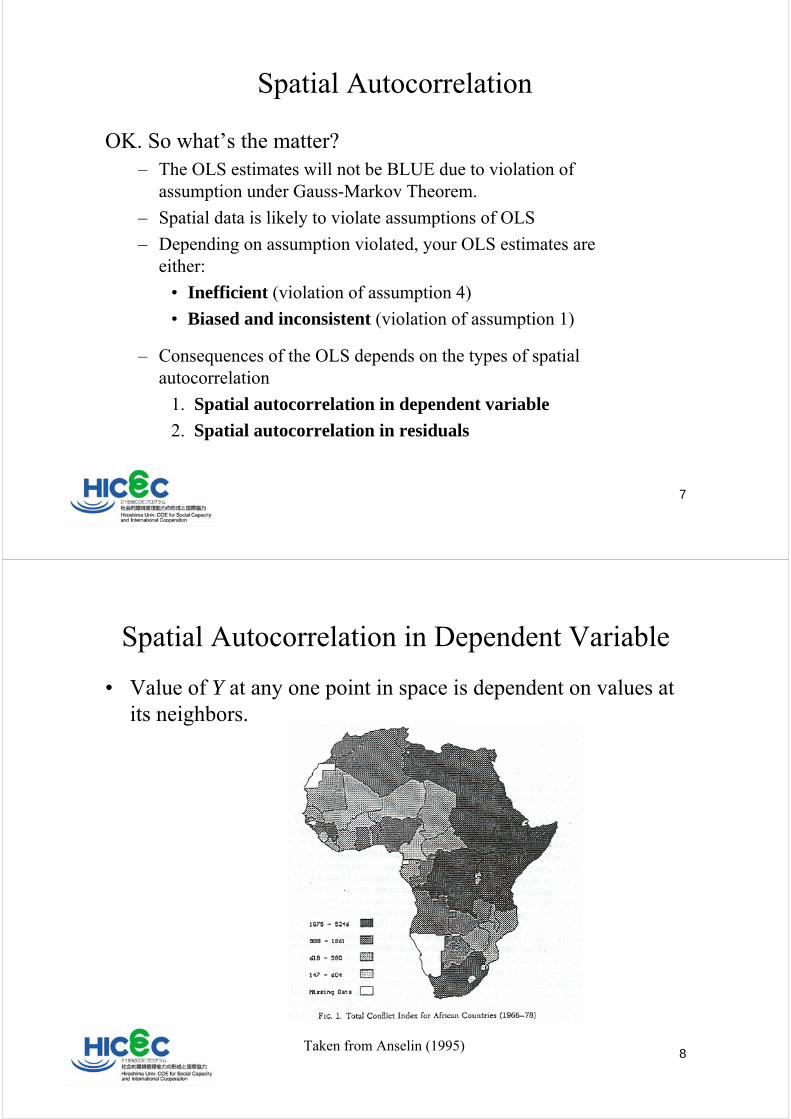
Spatial Autocorrelation in Dependent Variable
• Value of Y at any one point in space is dependent on values at its neighbors.
Taken from Anselin (1995)
9
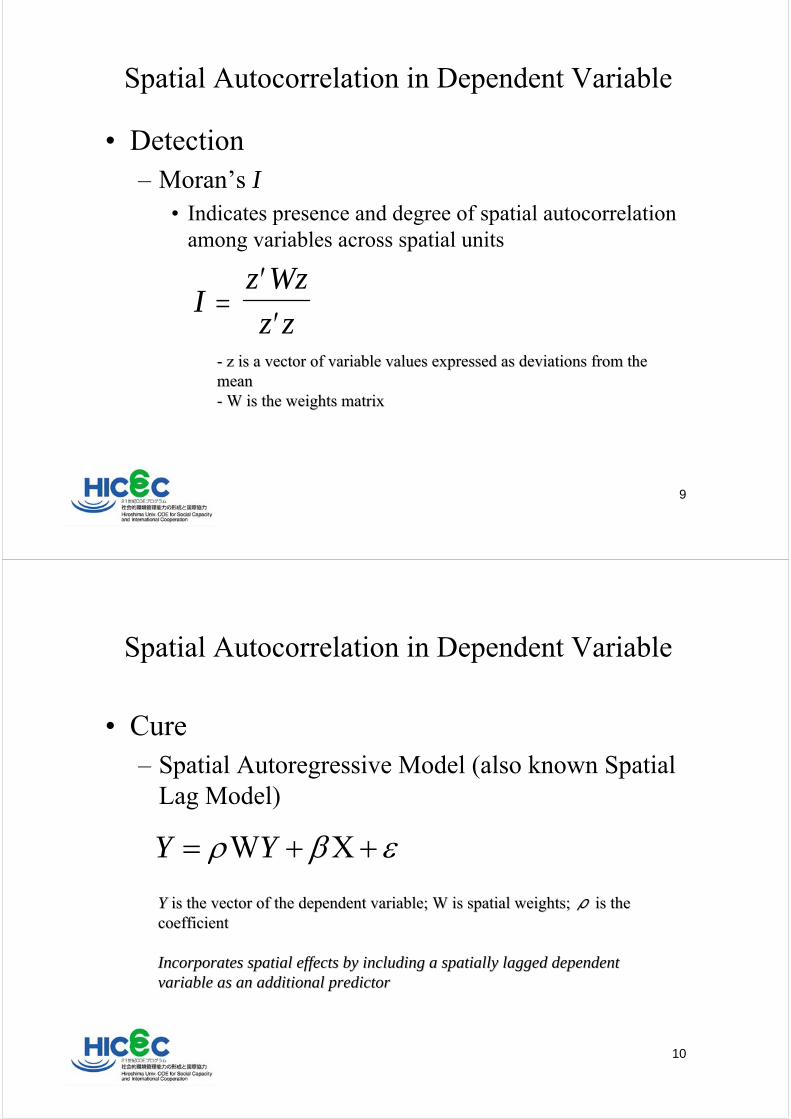
Spatial Autocorrelation in Dependent Variable
• Detection– Moran’s I
• Indicates presence and degree of spatial autocorrelation among variables across spatial units
Iz Wz
z z=
′′
-- z is a vector of variable values expressed as deviations from tz is a vector of variable values expressed as deviations from the he meanmean-- W is the weights matrixW is the weights matrix
10
Spatial Autocorrelation in Dependent Variable
• Cure– Spatial Autoregressive Model (also known Spatial
Lag Model)
W XY Yρ β ε= + +
YY is the vector of the dependent variable; W is spatial weights; is the vector of the dependent variable; W is spatial weights; ρρ is the is the coefficientcoefficient
Incorporates spatial effects by including a spatially lagged depIncorporates spatial effects by including a spatially lagged dependent endent variable as an additional predictorvariable as an additional predictor

11
Spatial Weights Matrix
• How spatial weights matrix (W) is defined– Rook contiguity
• common boundary at edge
– Queen contiguity• common boundary at both edge and point
– Distance-based
– k-nearest neighbors
12
Spatial Weights Matrix
• Example of rook contiguity
2 4
31
1 2 3 4
1 0 1 0 02 1 0 1 03 0 1 0 14 0 0 1 0
13
Spatial Autocorrelation in Residuals
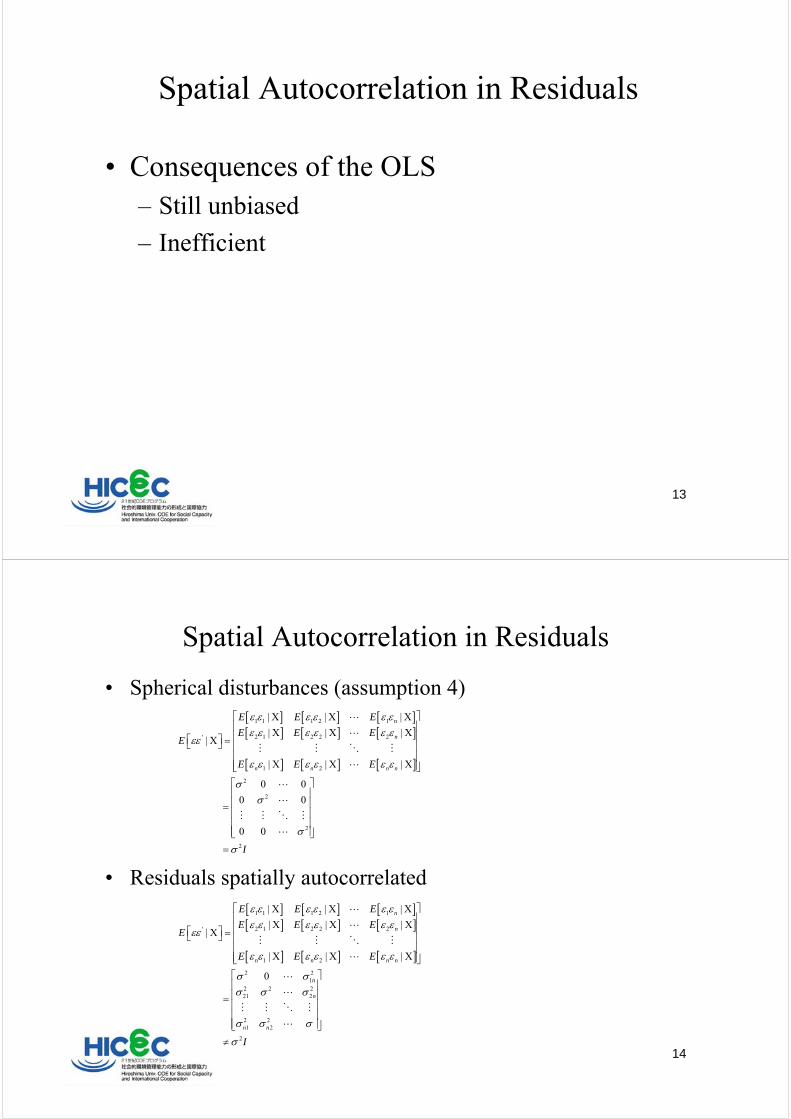
• Consequences of the OLS– Still unbiased
– Inefficient
14
Spatial Autocorrelation in Residuals
• Spherical disturbances (assumption 4)
• Residuals spatially autocorrelated
[ ] [ ] [ ][ ] [ ] [ ]
[ ] [ ] [ ]
1 1 1 2 1
2 1 2 2 2'
1 2
2
2
2
2
| X | X | X
| X | X | X| X
| X | X | X
0 0
0 0
0 0
n
n
n n n n
E E E
E E EE
E E E
I
ε ε ε ε ε εε ε ε ε ε ε
εε
ε ε ε ε ε ε
σσ
σ
σ
⎡ ⎤⎢ ⎥⎢ ⎥⎡ ⎤ =⎣ ⎦ ⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦⎡ ⎤⎢ ⎥⎢ ⎥=⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
=
L
L
M M O M
L
L
L
M M O M
L
[ ] [ ] [ ][ ] [ ] [ ]
[ ] [ ] [ ]
1 1 1 2 1
2 1 2 2 2'
1 2
2 21
2 2 221 2
2 21 2
2
| X | X | X
| X | X | X| X
| X | X | X
0
n
n
n n n n
n
n
n n
E E E
E E EE
E E E
I
ε ε ε ε ε εε ε ε ε ε ε
εε
ε ε ε ε ε ε
σ σσ σ σ
σ σ σ
σ
⎡ ⎤⎢ ⎥⎢ ⎥⎡ ⎤ =⎣ ⎦ ⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦⎡ ⎤⎢ ⎥⎢ ⎥=⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
≠
L
L
M M O M
L
L
L
M M O M
L
15
Spatial Autocorrelation in Residuals
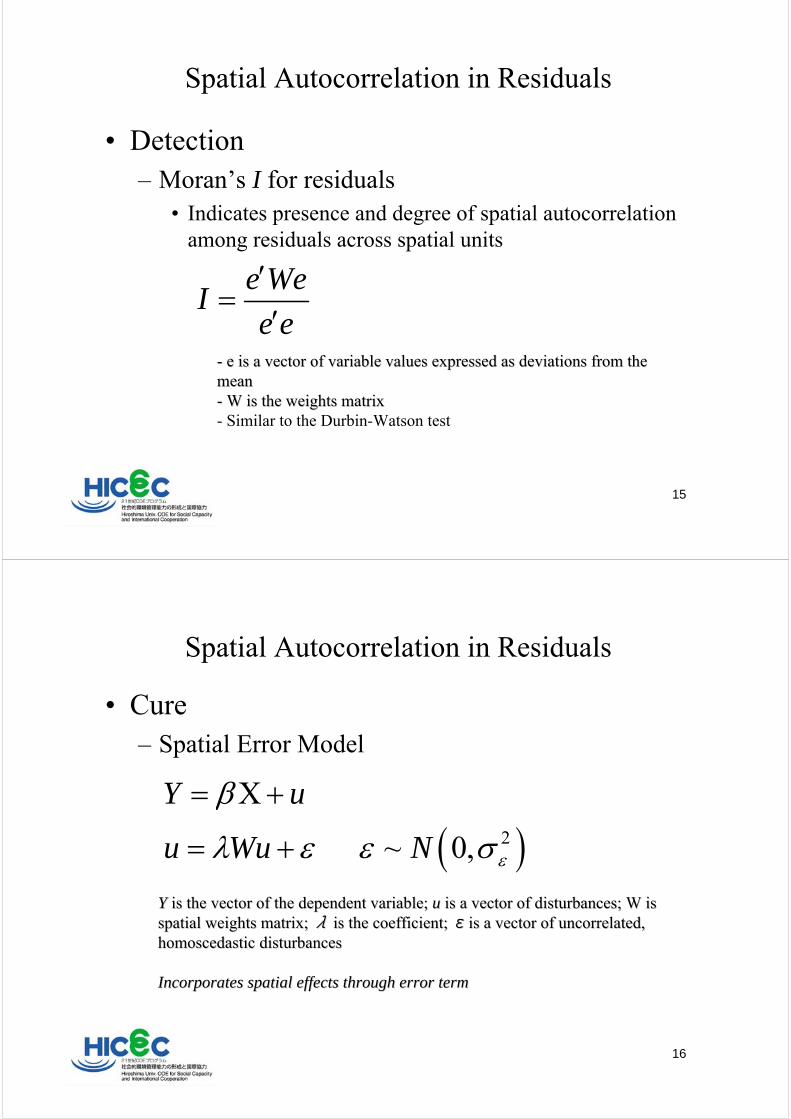
• Detection– Moran’s I for residuals
• Indicates presence and degree of spatial autocorrelation among residuals across spatial units
e WeI
e e
′=
′-- e is a vector of variable values expressed as deviations from te is a vector of variable values expressed as deviations from the he meanmean-- W is the weights matrixW is the weights matrix- Similar to the Durbin-Watson test
16
Spatial Autocorrelation in Residuals
• Cure– Spatial Error Model
YY is the vector of the dependent variable; is the vector of the dependent variable; uu is a vector of disturbances; W is is a vector of disturbances; W is spatial weights matrix; spatial weights matrix; λλ is the coefficient; is the coefficient; εεis a vector of uncorrelated, is a vector of uncorrelated, homoscedastic disturbanceshomoscedastic disturbances
Incorporates spatial effects through error termIncorporates spatial effects through error term
( )2
X
~ 0,
Y u
u Wu N ε
β
λ ε ε σ
= +
= +

17
Available Computer Packages
• SpaceStat– Easy graphical interface
– relatively old architecture
• GeoDa– Easy graphical interface with basic estimation routines
– Good for creating weights matrix
• R– Various estimation libraries available
– Works good with GeoDa
• MatLab– Extensive support from LeSage’s Spatial Econometric Toolbox
18
Conclusions from Introduction
• Spatial data is likely to have spatial autocorrelation problems
• Spatial autocorrelation violates the OLS assumptions
• If you use spatial data for your analysis, spatial autocorrelation needs to be tested
• Spatial autoregressive and spatial error models are solutions
• Recommended computer packages:1. R + GeoDa
2. MatLab
19
Application
20
Objectives
• Empirically environmental performance and its determinants in China
• Test the Environmental Kuznets Curve (EKC) hypothesis
• Examine the role of the SCEM on environmental performance
• Environmental performance: Industrial SO2 emission
• China’s 29 provinces during 1994-2003 (10 years)
21
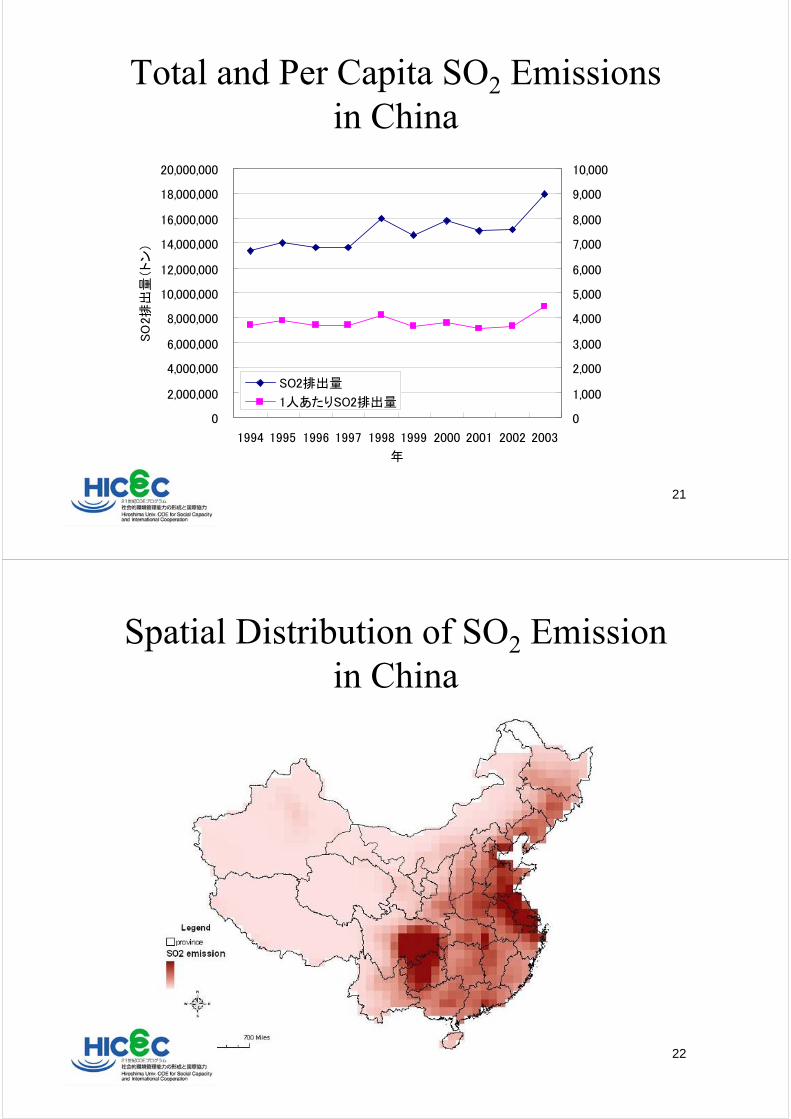
Total and Per Capita SO2 Emissionsin China
0
2,000,000
4,000,000
6,000,000
8,000,000
10,000,000
12,000,000
14,000,000
16,000,000
18,000,000
20,000,000
1994 1995 1996 1997 1998 1999 2000 2001 2002 2003
年
SO
2排
出量
(ト
ン)
0
1,000
2,000
3,000
4,000
5,000
6,000
7,000
8,000
9,000
10,000
SO2排出量
1人あたりSO2排出量
22
Spatial Distribution of SO2 Emissionin China

23
Tests for Spatial Autocorrelation
• Spatial autocorrelation in dependent variable:– Not detected by Moran’s I
• Spatial autocorrelation in residuals– Detected by Moran’s I for residuals
24
Spatial Error Model
( )2
1 2
3 4 5 6
ln ln ln
ln ln ln
Y X X
G F C TIME u
α β ββ β β β
= + +
+ + + + +
Y: SO2 emission per capita
X: GRP per capita
G: Environmental management capacity of government
(share of environmental budget in GRP)
F: Environmental management capacity of government
(SO2 removal ratio in industrial sector)
C: Environmental management capacity of government
(# of air quality complaints per population)
TIME: Time trend

25
Spatial Error Model
u: Disturbance
W: Spatial weights matrix
λ: Parameter to be estimated
ε: random component of disturbance
( )2W , ~ 0,u u N Iελ ε ε σ= +
26
The Estimated Results ofSpatial Error Model
Coefficient P-value Coefficient P-value
4.43835 *** < 2e-16 4.55480 *** < 2.2e-16
1.28135 *** 4.88e-14 1.32416 *** < 2.2e-16
0.78681 *** 3.20e-13 0.81911 *** 2.220e-16
G -0.39800 *** 1.66e-13 -0.39009 *** 4.796e-14
F -0.21989 0.11181 -0.22390 ** 0.02185
C -0.12368 *** 0.00079 -0.13785 *** 0.00016
0.02794 * 0.03291 0.02368 *** 0.00460
- - 0.27700 *** 0.00516
290
0.33
-272.59 -217.50559.18 453.00AIC
λ
n
Adjusted R 2
Log likelihood
GRP pre capita
(GRP per capita)2
SCEM
Time trend
OLS Spatial Error Model
Intercept

27
Conclusions from Application
• Spatial error dependence exists in China’s SO2
emissions among provinces
• Spatial error model significantly improves the estimation
• EKC hypothesis not met
• Significant contribution of the SCEM on SO2
emission reduction in China