Embed Size (px)
Citation preview

ENGR 215 ~ Dynamics Sections 16.6

Relative Motion Analysis

Relative Motion Analysis
ABAB
ABAB
/
/
rωvv
vvv
Instantaneous Center of Zero Velocity
• In this section we learn to solve problems similar to Section 16.5, we just use a different technique.
• I do not care which method you use.
Relative Motion Analysis
ABAB
ABAB
/
/
rωvv
vvv
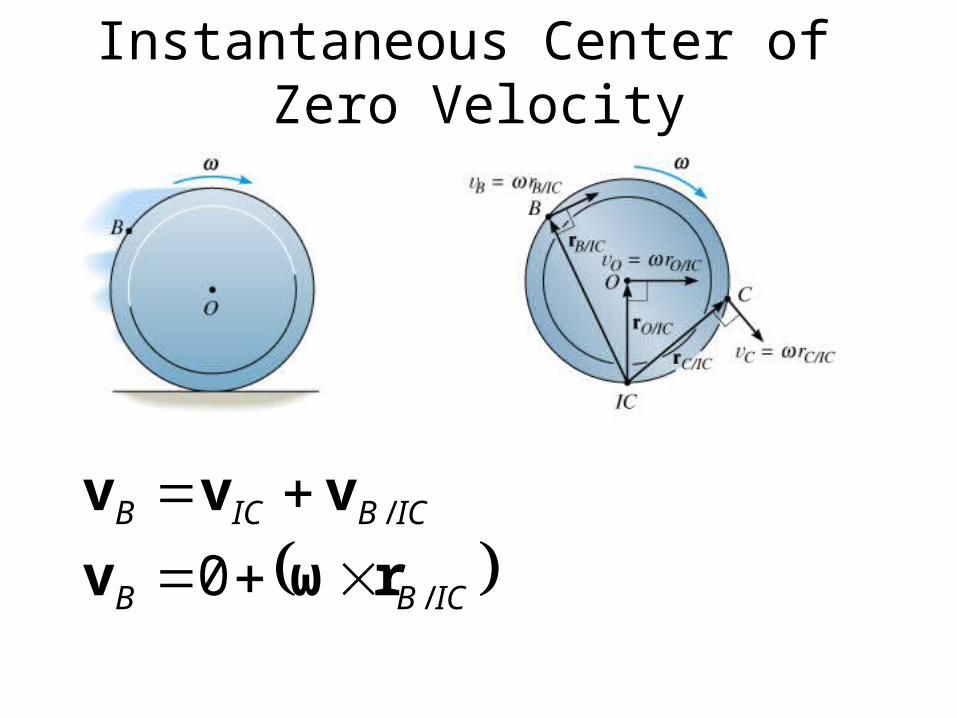
Instantaneous Center of Zero Velocity
ICBB
ICBICB
/
/
0 rωv
vvv
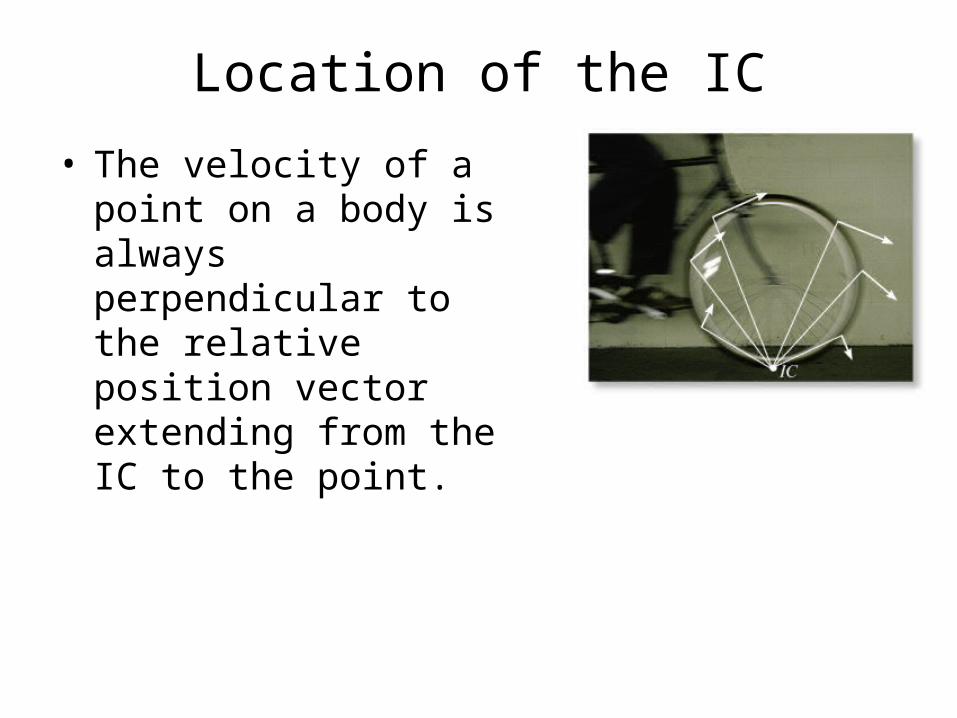
Location of the IC
• The velocity of a point on a body is always perpendicular to the relative position vector extending from the IC to the point.

Case 1: Location of IC
• Given the velocity vA of Point A on a body and the angular velocity ω of the body.
ω
vr
ωrv
AA/IC
A/ICA
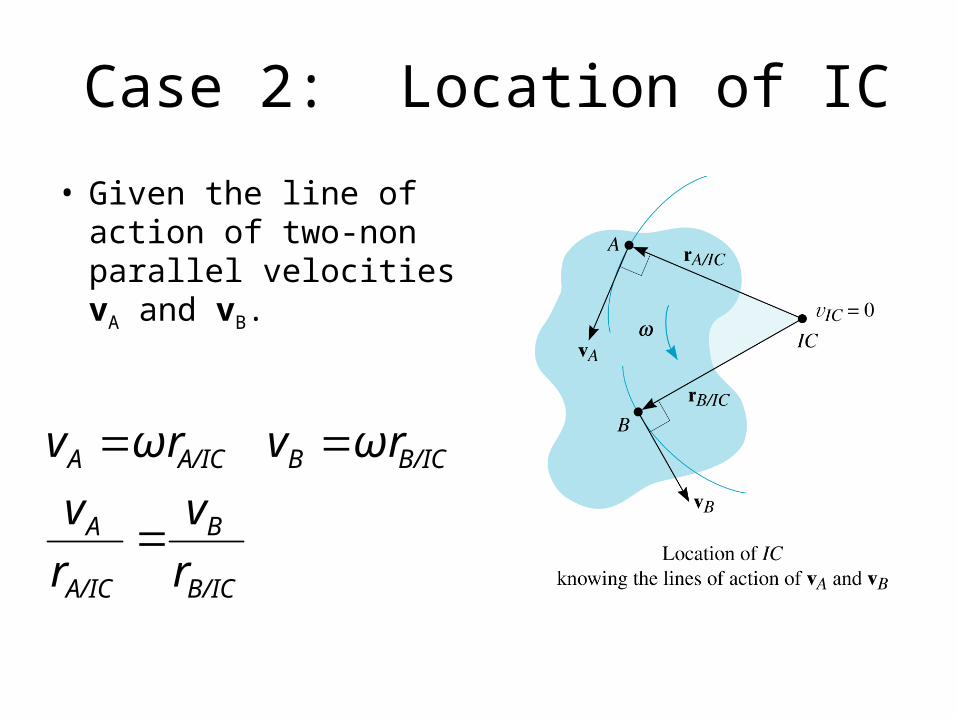
Case 2: Location of IC
• Given the line of action of two-non parallel velocities vA and vB.
B/IC
B
A/IC
A
B/ICBA/ICA
r
v
r
v
ωrvωrv

Case 3: Location of IC
• Given the magnitude and direction of to parallel velocities vA and vB.
• The point chosen as the instantaneous center of zero velocity can only be used for an instant in time since the body changes its position from one instant to the next.
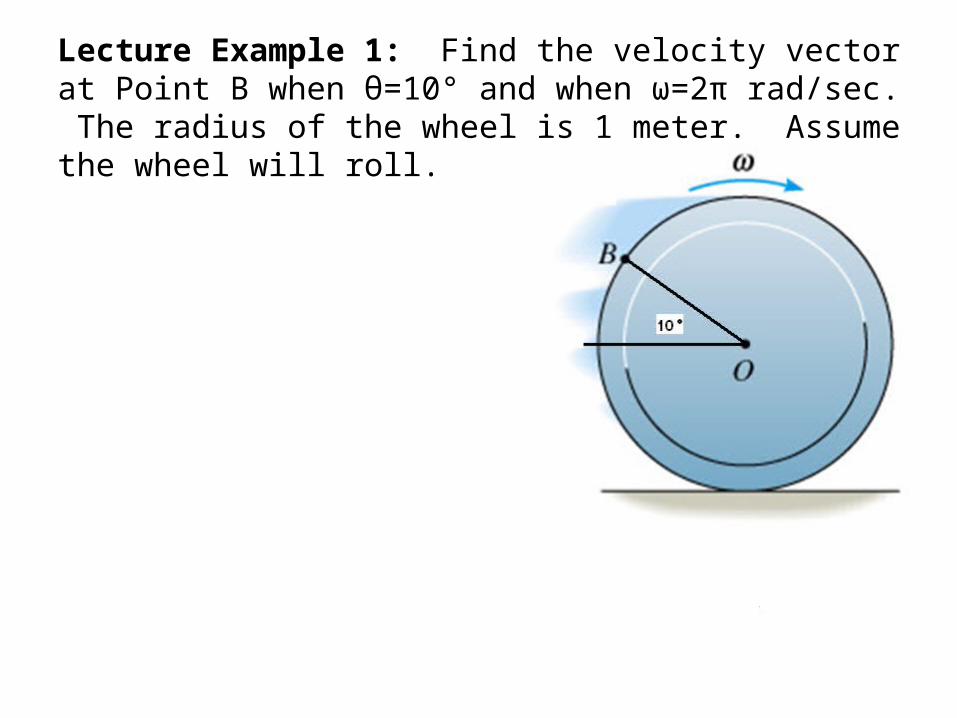
Lecture Example 1: Find the velocity vector at Point B when θ=10° and when ω=2π rad/sec. The radius of the wheel is 1 meter. Assume the wheel will roll.
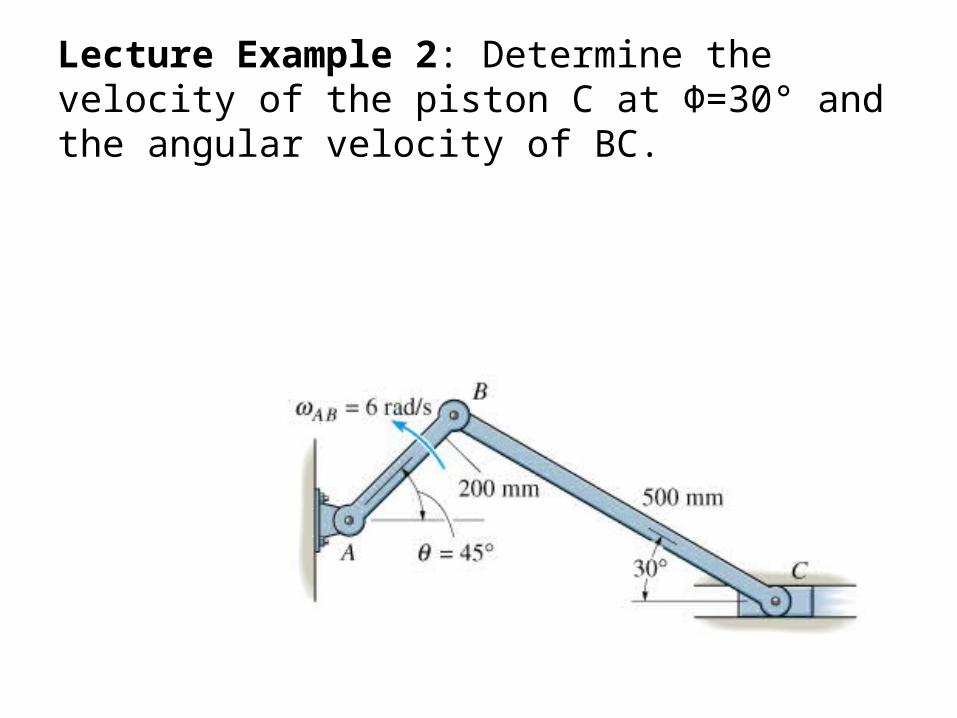
Lecture Example 2: Determine the velocity of the piston C at Φ=30° and the angular velocity of BC.
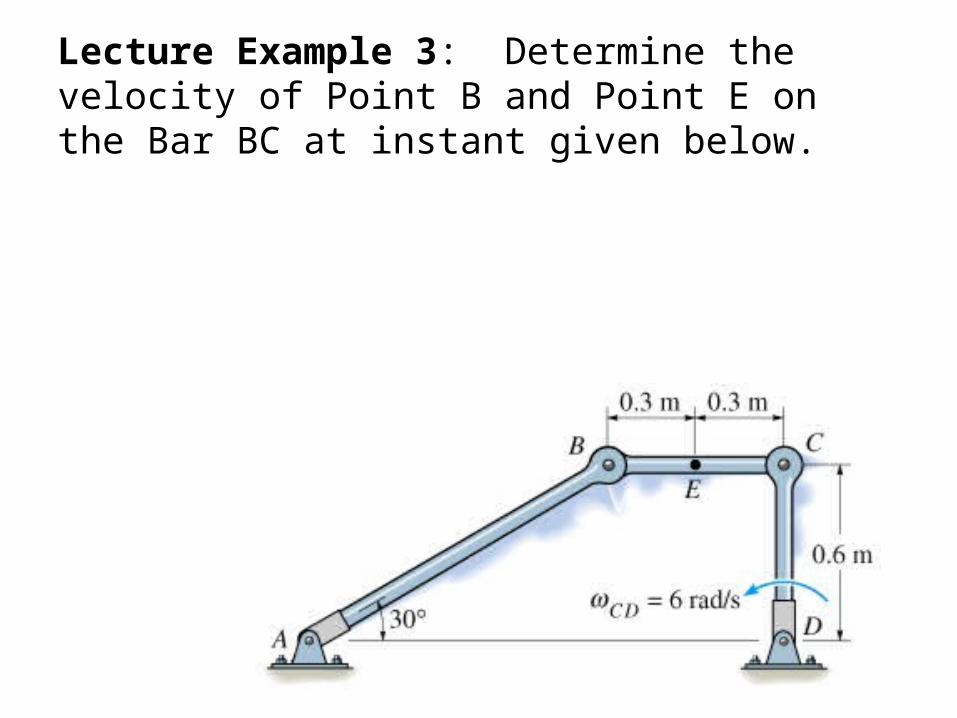
Lecture Example 3: Determine the velocity of Point B and Point E on the Bar BC at instant given below.