Embed Size (px)
Citation preview

1
SIMULATION MODELLING OF VOLTAGE STABILITY OF AN INTERCONNECTED ELECTRIC POWER SYSTEM NETWORK.
A Thesis Submitted in Partial Fulfilment For the Award of Doctor of Philosophy
(Ph.D) in Electrical Engineering
By
Enemuoh Francis Odilichukwu Reg. No. PG/Ph.D/03/35105
Supervisor
Ven.Engr.Prof. T.C.Madueme Professor of Electrical Engineering
Department of Electrical Engineering
University of Nigeria, Nsukka. APRIL 2012

2
APPROVAL PAGE
SIMULATION MODELLING OF VOLTAGE STABILITY OF AN INTERCONNECTED ELECTRIC POWER SYSTEM NETWORK
By
ENEMUOH FRANCIS ODILICHUKWU
REG.NO. PG/Ph.D/03/35105
A THESIS SUBMITTED IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE AWARD OF THE DEGREE OF DOCTOR OF PHILOSOPHY (Ph.D) IN ELECTRICAL ENGINEERING, UNIVERSITY OF
NIGERIA, NSUKKA.
APRIL, 2012 Enemuoh F.O. Signature……………. Date……...... (Student) Ven. Engr. Prof T. C. Madueme Signature…………….. Date………… (Supervisor) Engr. Prof F. N. Okafor Signature……………. Date………… (External Examiner) Engr. Dr. B. O. Anyaka Signatue…………….. Date………… (Head of Department) Engr. Prof. J. C. Agunwamba Signature……………. Date………… (Dean of Faculty)

3
Certification
ENEMUOH, FRANCIS ODILICHUKWU, a doctoral degree postgraduate student in the
Department of Electrical Engineering and with registration number PG / Ph.D / 03 /35105 has
satisfactorily completed the requirements for the award of the degree of Doctor of Philosophy in
Electrical Engineering
The work embodied in this thesis is original and has not been submitted in part or in full for any
other diploma or degree of this or any other University to the best of our knowledge.
--------------------------------------- ---------------------------------
Ven. Engr. Prof. T. C. Madueme Engr. Prof. F. N. Okafor
(Supervisor) (External Examiner)
------------------------------------ -----------------------------------
Engr. Dr. B. O. Anyaka Engr. Prof. J. C. Agunwamba
(Head of Department) (Dean of Faculty)

4
Table of Contents Pages
Chapter Title page i
Approval page ii
Certification iii
Abstract vii
Acknowledgement viii
Dedication ix
List of figures x
List of tables xi
List of symbols and abbreviations xiii
Chapter One 1
1.0 Introduction 1
1.1 Background of the study 1
1.2 Statement of the Problem 5
1.3 The Research Motivation 6
1.4 Purpose of the Study 7
1.5 Scope of Study 8
1.6 Outline of the Dissertation 11
Chapter Two 12
2.0 Literature Review 12
2.1 Electric Power System Stability. 12
2.2 Classification of Power Systems Stability 13
2.2.1 Synchronous Stability 13
2.2.2 Dynamic Stability 14
2.2.3 Angle Stability 14
2.2.4 Small- disturbance Angle Stability 15
2.2.5 The Steady-State Stability 15
2.2.6 Transient Stability 16
2.2.7 Frequency Stability 16
2.2.8 Asynchronous Stability 16

5
2.3 Relation of Voltage Stability to Rotor Angle Stability 16
2.4 Concepts of Voltage Stability and voltage Collapse in Electric Power System 18
2.5 Control Problems of Megawatts and Megavars in Electric Power System 22
2.6 Nigerian 330kV, 30Bus Interconnected Electric Power System 23
2.6.1 System Description 23
2.7 System Disturbances/Collapses in Nigerian Interconnected Power System 25
2.8 Reactive Power Compensation in Nigerian 330kV, 30Bus
Interconnected Electric Power System 26
2.9 Methods for Voltage Stability Analysis 26
2.10 Methods of Voltage Collapse Point Computation 41
2.11 Comparison of Computation Methods of Voltage Stability 45
Chapter Three 47
3.0 Power System Modelling 47
3.1 Philosophy of Engineering Modelling 47
3.2 System Modelling on Power System Operation 47
3.3 Models for Voltage Stability Investigation and Assessment 49
3.4 Generators and their excitation controls 50
3.5 Automatic Generation Control (AGC) 57
3.6 Modelling of Static Var Systems 61
3.7 Modelling of Power Network 63
3.8 Load Model 65
3.9 Static Modelling of Voltage Stability of Large System 67
3.10 Dynamic modelling of Voltage Stability 69
Chapter Four 71
4.0 Method of Analysis of Voltage Stability 71
4.1 Introduction 71
4.2 Power Flow Problem 72
4.3 Modal Analysis 75
4.4 Identification of the Weak Load Buses 80
4.4.1 Bus participation factor 80

6
4.4.2 Branch participation factor 80
4.4.3 Generator participation factor 81
4.5 V-Q Sensitivity Analysis 81
Chapter Five 83
5.0 Sample Systems Modelling Simulation and
Results Analysis 83
5.1 Introduction 83
5.2 Simulation Modelling of the IEEE 14 Bus System 83
5.3 Nigerian System Modelling, Simulation, Results and Analysis 89
5.3.1 The Compensated Nigerian Interconnected Power System (CNIPS)
Network Modelling, Simulation, Results and Analysis. 100
Chapter Six 111
6.0 Achievements, Contributions, Recommendations and Conclusion, 111
6.1 Achievements of the Thesis 111
6.2 Contributions of the Thesis to Knowledge 111
6.3 Recommendations for future work 112
6.4 Conclusion 113
References 115
Appendix 124
Matlab Code for Load Flow Program 128
Appendix 148

7
ABSTRACT
The research work is directed towards investigation and assessment of voltage stability operation
of a typical interconnected MkV, NBus power system network. Investigations on power system stability operation of an interconnected power system networks have
been a major concern to system operators especially in area of voltage stability assessment
essential for indication of point of voltage collapse in the system. This is achieved by accurate
modelling of the typical interconnected power system using a known power system analysis
software package, on which the system will be modelled using power system analysis tools
(PSAT). The interconnected power systems used in this thesis test systems are the IEEE 14 Bus
system and the Nigerian 330kV, 30Bus uncompensated and compensated power systems were
modelled in a digital computer using NEPLAN software package operated in MATLAB Version
7.5.0 environment. With the known parameters of the networks, the system is simulated for
investigation and assessment of voltage stability. The method used in the analysis is
modal/eigenvalue analysis with voltage reactive power sensitivity used as a determining factor
while the Q-V curves were used to confirm the result. The values of the various eigenvalues are
used for the determination of the various V-Q sensitivities of the buses, and the value of the least
eigenvalue is used to indicate the bus at that value that will on loading experience voltage
collapse. The highest positive V-Q sensitivity will indicate the proximity to voltage collapse with
the increased loading of the bus. The modelled networks on simulation gave loadflow results of
voltages within acceptable ranges (± 5%) for the IEEE 14 Bus system and the compensated
Nigerian system except three nodes for the uncompensated. The system is simulated for voltage
stability and the results gave the required eigenvalues of the systems with least eigenvalues
identified. The V-Q sensitivities clearly indicated the nodes with highest sensitivities. At the
least eigenvalues, the buses, branches and generators with highest participation factors were
identified. With increased loading of the network, the buses, branches and generators that are
highly disposed to contribute to voltage collapse were indicated.

8
ACKNOWLEDGEMENTS
First I would like to express my sincere appreciation to my supervisor, Ven. Engr. Prof. T.C.
Madueme for his guidance and advice while carrying out the research work. I would also thank
Engr. Prof. M.U.Agu, Engr. Prof. I.O. Okoro, Engr. Dr. L. U.Anih and Engr. Dr. Paul Ekemezie
for their encouragements and advices. My thanks is extended to Engr. Dr. G. C. Ejebe for his
training on the use of software packages.
I wish to thank the entire staff of the Department of Electrical Engineering of the University of
Nigerian Nsukka for their various contributions.
My appreciation also goes to Nwafor Adaku for word processing of this work.
To the entire staff of Departments of Electrical Engineering and Electronic and Computer
Engineering of Nnamdi Azikiwe University Awka, I appreciate your cooperation while the work
is going on. My thanks goes to Engr. Dr. Vin Agu for making out time to read the work and give
some corrections.
Special thanks to my wife and children for their support, help and patience while I travel for
academic pursuit. Finally, I would like to thank my friend Engr. Dr. Emma Anazia for his
support and encouragement.

9
DEDICATION
To my late parents: Nze Matthias Enemuoh and Mrs. Veronica Enemuoh (Gold)
To my dear wife: Chioma
To my children: Nnenna, Ogechukwu, Mmesomachukwu and Ebubechukwu

10
List of figures pages
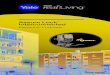
Figure 1.1 Line diagram of the IEEE 14Bus interconnected network 9
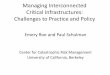
Figure 1.2 Line diagram of the PHCN 330kV, 30Bus interconnected network 10
Figure 2.1 Simple examples showing extreme situations 17
Figure 2.2 Typical P-V curve 29
Figure 2.3 Typical Q-V Curve 31
Figure 2.4 A P-V curve and a load characteristic where the load demand is increased 37
Figure 2.5 P-V curve solution using predictor correction technique 44
Figure 3.1 AVR and exciter model for synchronous generator 53
Figure 3.2 Principal operation for delayed current limiter at constant overload 54
Figure 3.3 System model for field current limitation 55
Figure 3.4 System model for armature current limitation 56
Figure 3.5 Equivalent network for a two-area power system 57
Figure 3.6 Two-area system with only primary LFC loop 59
Figure 3.7 Schematic of a typical SVS 62
Figure 3.8 SVS functional block diagram 62
Figure 3.9 A two-bus system 63
Figure 4.1 Algorithm for the voltage stability analysis 79
Figure 5.1 The IEEE 14 Bus System Modelled using Neplan
software simulated on matlab 7.5.0 environment 84
Figure 5.2 Voltage Profile of all buses of the IEEE 14 Bus System 85
Figure 5.3 Q-V Sensitivity of IEEE 14 Bus system 86
Figure 5.4 Bus Participation Factors at the Least eigenvalue of λ = 2.0792 87
Figure 5.5 The branch Participation Factor for Least Eigenvalue λ = 2.0792 88
Figure 5.6 Generator Participation Factor at least Eigenvalue of λ = 2.0792 89
Figure 5.7 Nigerian 330kV, 30Bus Interconnected Power System Network,
modelled Using NEPLAN software Simulated in Matlab 7.5.0 Environment. 90
Figure 5.8 Voltage Profile of PHCN 30Bus System 91
Figure 5.9 The P-V Curves For Jos, Maiduguri and Gombe 92
Figure 5.10 The Q-V Curves for Maiduguri, Gombe and Jos 93
Figure 5.11 The Eigenvalues of The 23 Buses 95

11
Figure 5.12 The V-Q Sensitivities of All Buses 97
Figure 5.13 Bus Participation Factors at the Least Eigenvalue of 3.4951 98
Figure 5.14 The Branch Participation Factors at the Least Eigenvalue of 3.4951 99
Figure 5.15 The Generator Participation Factors at the Least Eigenvalue of 3.4951 100
Figure 5.16 Voltage Profile of the Compensated 330kV, 30Bus System 102
Figure 5.17 The eigenvalues of the 23 buses of the compensated NIPS 104
Figure 5.18 The v-q sensitivities of all buses for the compensated NIPS. 106
Figure 5.19 Bus participation factors of the compensated NIPS
at the least eigenvalue of 3.6755 107
Figure 5.20 Branch participation factors of the compensated NIPS
at the least eigenvalue of 3.6755 108
Figure 5.21 Generator participation factors of the compensated NIPS
at the least eigenvalue of 3.6755 109
Figure 5.22 The Q-V curves for the compensated NIPS. 110

12
List of Tables Pages
Table 2.1 Voltage collapse incidents 20
Table 2.2 Incidents without collapse 21
Table 2.3 Summary of System Disturbances of [NIPS]
January –December ( 1985-2000) 25
Table 2.4 Status of Reactors in the Nigerian 330kV, 30Bus Interconnected
Electric Power System Network 26
Table 5.1 Line Data for IEEE 14 Bus system 123
Table 5.2 Load Data for IEEE 14 Bus system 124
Table 5.3 IEEE 14 Bus system eigenvalues. 85
Table 5.4 Line data for 330kV, 30Bus NIPS 125
Table 5.5 Load distribution for 330kV, 30Bus NIPS 126
Table 5.6 Load flow results for 330kV, 30Bus NIPS 147
Table 5.7 Elements results for 330kV, 30Bus NIPS 148
Table5.8 Buses with voltages below acceptable (±5%) level
for 330kV, 30Bus NIPS 91
Table 5.9 PHCN 30Bus eigenvalues for 330kV 30Bus NIPS 94
Table 5.10 V-Q sensitivities for 330kV 30Bus NIPS 96
Table 5.11 Bus participation factors of various eigenvalues
for 330kV 30Bus NIPS 154
Table 5.12 Branch participation factors of various eigenvalues
for 330kV 30Bus NIPS 156
Table 5.13 Generator participation factors of various eigenvalues
for 330kV 30Bus NIPS 159
Table 5.14 Status of Reactors used in the Modelling and Simulation of
Nigerian 330kV, 30Bus NIPS 101
Table 5.15 Nodes Results PHCN 2004 Bus Model with Compensators 161
Table 5.16 NIPS 330kV, 30 Buses Compensated system eigenvalues 103
Table 5.17 The V-Q sensitivities for the compensated NIPS network system 105

13
List of Symbols and Abbreviations
J − Jacobian matrix
λ − Eigenvalue
JR − Reduced jacobian matrix
x − State variables of the system
P − Active power
Q − Reactive power
θ − Angle
V − Voltage
γ − Loss participation coefficient
kG − Distribution slack bus variable
Po − Initial bus load active power
Vo − Initial bus voltage
Qo − Initial bus reactive power
ed − Direct axis instantaneous stator phase voltage
eq − Quadrature instantaneous stator phase voltage
ψ − Flux linkage
id − Direct axis instantaneous stator phase current
iq − Quadrature axis instantaneous stator phase current
Ra − Armature resistance per phase
ωr − rotor electrical speed
β − Frequency bias factor
R − Composite governor droop
D − Composite load damping
Pm− Active power consumption model
Pr − Active power recovery
αs − Steady state active load-voltage dependence
αt − Transient active load- voltage
Тpr − Active load recovery time constant
Qm − Reactive power consumption model
βs − Steady state reactive load-voltage dependence

14
List of Symbols and Abbreviations
βt − Transient reactive load- voltage dependence
rq − Reactive load recovery time constant
Y − Admittance matrix
S − Apparent power
n − Number of buses
δk − Angle of voltage
δkm − Load angle
Φ − Right eigenvector
− Left eigenvector
Pki− Bus participation factor
Pj − Branch participation factor
Pm − Generator participation factor
NDA - Nigerian Dams Authority
ECN – Electricity Corporation of Nigeria
NEPA- National Electric Power Authority
NERC- North American Electric Reliability Council
PHCN – Power Holding Company of Nigeria
NIPS- Nigerian Interconnected Power System
VSE – Voltage Stability Evaluation
EMS – Energy Management System
POC – Point of Collapse
VCPI – Voltage Collapse Proximity Indicator
OLTC- Over Load Tap Changer
AGC – Automatic Generation Control
SDAS- Small Distributed Angle Stability
PSS- Power System Stability
PST- Power System Toolbox
AVR- Automatic Voltage Regulator
LFC- Load Frequency Control
CNIPS- Compensated Nigerian Interconnected Power System

15
CHAPTER ONE
INTRODUCTION
1.1 Background of the Study
For many years, the demand for and consumption of energy in many countries of the world has
been on the increase. The major portion of the energy needs of these nations is electric energy. In
Nigeria and other industrial developing nations, the demand for supply of electrical power has
been on the increase, which may be as a result of improved economic activities of the people. To
satisfy the increasing demand for electricity, complex power system networks have been built.
The most usual practice in electric power transmission and distribution is an interconnected
network of transmission lines usually referred to as a grid system that links generators and loads
to form a large integrated system that spans the entire country. In many countries of the world
including Nigeria, generating stations are located thousands of kilometers apart and operate in
parallel. The generating stations’ output is connected and transmitted through the grid system to
load centers nationwide.
The complexity of an interconnected electric power system network provides different
challenging engineering problems to the operators. These problems are in aspect of planning,
construction, operation and control of the system. The problems can stimulate the managerial
talent of the operator, while others tax his knowledge and experience in network design.
One operating characteristic of power systems is that the devices included in the model can reach
a particular state at which the equation that models the system will change. This characteristic is
independent of many of the other assumptions used to model the system. The new state of the
network must be predicted on automatic control and not on human operational response that can
be very slow. The operator is forced to rely on ever more powerful tools of solving the problem
of prediction of the performance of the complex system. One of the several problems confronting
the efficient performance of an interconnected system is voltage stability.

16
Voltage stability issues are of major concern worldwide because of the significant number of
black-outs that have occurred in recent times in which it was involved. For many power systems,
assessment of voltage stability and prediction of voltage instability or collapse have become the
most important types of analysis performed as part of system planning, operational planning and
real-time operation. Voltage stability is defined as the ability of a power system to maintain
steady acceptable voltages at all buses in the system under normal operating conditions, and after
being subjected to a disturbance [1]. In other words, voltage stability is the ability of a system to
maintain voltage so that when load admittance is increased, load power will increase, and so that
both power and voltage are controllable. The ability to transfer reactive power from production
sources to consumption sinks during steady operating conditions is a major aspect of voltage
stability. Voltage stability deals with the ability to control the voltage level within a narrow band
around normal operating voltage.
The consumers of electric energy are used to rather small variations in the voltage level and the
system behaviour from the operators’ point of view is fairly well known in this normal operating
state. Equipment control and operation are tuned towards specified set points giving small losses
and avoiding power variation due to voltage sensitive loads.
Once outside the normal operating voltage band many things may happen of which some are not
well understood or properly taken into account today. A combination of actions and interactions
in the power system can start a process which may cause a completely loss of voltage control. It
is known that to maintain an acceptable system voltage profile, a sufficient reactive support at
appropriate locations must be found. Nevertheless, maintaining a good voltage profile does not
automatically guarantee voltage stability. On the other hand, low voltage although frequently
associated with voltage instability is not necessarily its cause [2] and [3].
Voltage stability studies of a power system is now essential and is intended to help in the
classification and the understanding of different aspects of power system stability [4].
Voltage stability evaluation requires the determination of:-
(i) The parameters and a stress test that establish the structural causes of voltage collapse
and instability in each load area (exhaustion of reactive reserves in a reactive reserve
basin).

17
(ii) A method of identifying each load area (voltage collapse and instability area) that has
a unique voltage collapse and instability problem, and
(iii) A measure of proximity to voltage collapse for each load area (a measure of reactive
reserve or voltage control areas with zero reserves in the reactive reserve basin)
Voltage stability assessment involves two methods, the static method and dynamic method. The
static method is intended to evaluate the voltage stability margin based on load flow steady state
analytical techniques, such as continuation method, multiple power flow solutions, sensitivity
analysis, singular value or modal analysis of Jacobian matrix, etc. It consists of either load flow
or steady state stability methods. Static analysis is useful for indicating the possibility of voltage
collapse.
The dynamic method employs non-linear algebraic and differential equations in the power
system model. It indicates the true dynamic behaviour of the voltage instability. Dynamic
analysis is important in complementing the steady state analysis and for a better understanding of
voltage stability phenomena.
One of the operating goals of an electric power system is to attend the power demand keeping
the system’s voltages as well as the frequency close to rated values. Deviation from these
nominal conditions may result in abnormal performance of or even damage to the supplied
equipment. An unacceptable voltage level means voltage instability. The voltage instability, also
known as voltage collapse of power systems appears when the attempt of load dynamics to
restore power consumption is just beyond the capability of the combined transmission and
generator system [5]. The problem is also a main concern in power system operation and
planning. It is characterized by a sudden reduction of voltage on a set of buses of the system. In
the initial stage the decrease of the system voltage starts gradually and then decreases rapidly.
The following can be considered the main contributing factors to the problem [6]:
1. Stressed power system; i.e., high active power loading in the system.
2. Inadequate reactive power resources.
3. Load characteristics at low voltage magnitude and their difference from those
traditionally used in stability studies.

18
4. Transformers tap changer response to decreasing voltage magnitudes at the load
buses.
5. Unexpected and or unwanted relay operation may occur during conditions with
decreased voltage magnitudes.
This problem is a dynamic phenomenon and transient stability simulation may be used.
However, such simulations do not readily provide sensitivity information or the degree of
stability. They are also time consuming in terms of computers and engineering effort required for
analysis of results.
The problem regularly requires inspection of a wide range of system conditions and a large
number of contingencies. For such application, the steady state analysis approach is much more
suitable and can provide much insight into the voltage and reactive power loads problem [7] and
[8].
So, there is a requirement to have an analytical method, which can predict the voltage collapse
problem in a power system. As a result, considerable attention has been given to this problem by
many power system researchers. A number of techniques have been proposed in the literature for
the analysis of this problem [9].
The problem of reactive power and voltage control is well known and is considered by many
researchers.
The dynamic analysis is especially critical in the final stages at the points of voltage collapse.
Dynamic voltage stability is analyzed by monitoring the eigen-value of the linearized system as a
power system is progressively loaded. Instability occurs when a pair of complex eigen-value
crosses to the right half plane. This is referred to as dynamic voltage instability.
The system will experience a voltage collapse and this will result to a rapid loss of electrical
supply in wide areas, sometimes affecting millions of people.
The origin of a significant voltage deviation is in most cases some kind of contingency where
generation in a vital power plant shuts down or an important transmission line is disconnected
from the power grid.
This indicates a voltage change and alters the system characteristics. The system is normally
designed to withstand these kinds of single contingencies occurring many times

19
a year. However, abnormal operating conditions, several independent contingencies occurring
almost simultaneously in time or a completely unexpected phenomenon may violate the normal
design conditions. These lead to an insecure operating condition threatening the voltage stability
of the system. The goal is therefore to try to understand the course of events after such a
contingency and propose remedial actions when the control of voltage is insecure.
In this thesis, a powerful software NEPLAN operated in matlab 7.5.0 environment is used to
model an interconnected power system networks using power system analysis tools (PSAT) and
simulated for voltage stability evaluation using Modal Analysis Technique.
This technique was chosen after reviewing all available literature presented in Chapter two of
this thesis, and found that (Modal analysis Technique) is capable of determining the objectives
(i) – (iii) mentioned above with less stress to the researcher [10]
The Modal analysis calculates the smallest eigenvalues of the reduced Jacobian Matrix RJ and
the bus, branch, and generator participation factors. The smallest eigenvalue and its associated
eigenvectors of RJ at the nose of the PV curve defined the critical mode of voltage stability.
The corresponding bus, branch and generator participations identify the voltage stability sub-
zone, and the elements that have large impact on the voltage stability of this critical mode. This
would enable remedial measure to be applied at the sub-zone identified by these participations so
as to enhance the voltage stability of the critical zone and mitigate the negative impact of these
elements on the overall system voltage stability.
1.2 Statement of the Problem
The analysis of voltage stability for a given system involves the examination of two aspects:
(1) Proximity to voltage instability.
How close is the system to voltage instability (which is the distance to instability)
This may be measured in terms of physical quantities, such as load level, active power flow
through a critical interface, and reactive power reserve. The most appropriate measure for
any given situation depends on the specific system and the

20
intended use of the margin; for example, planning versus operating decisions. Also in
measurement, consideration must be given to possible contingencies (line outages, loss of a
generating unit or a reactive power source, etc.).
(11) Mechanism of voltage instability.
In considering the mechanism of voltage instability the following issues must be clarified:
How and why does instability occur?
What are key factors contributing to instability?
What are the voltage weak areas?
What measures must be effected in improving voltage stability?
Time-domain simulation, in which appropriate modelling is included, capture the events and
their chronology leading to instability. However, such simulations are time-consuming and do
not readily provide sensitivity information and degree of stability. System dynamics influencing
voltage stability are usually slow. The static analysis like Modal/Eigenvalue technique can
provide much insight into the nature of the problem and identify the key contributing factors.
The advantage of Modal analysis technique is that it gives voltage stability-related information
from system –wide perspective and clearly identifies areas that have potential problem. It has the
added advantage that it exposes and measures all masked information regarding the mechanism
of instability.
The analysis of a generator connected to an infinite bus does not pose the kind of challenge
encountered when an interconnected system is in focus. The challenge is always associated with
modelling capability of the interconnected system and the ability to solve the problem using
simulation software operated in the Matlab environment as proposed in this thesis.
1.3 The Research Motivation
An interconnected power system is affected by events that depend upon the states
(voltage magnitude and current) and parameters ( real and reactive power) of the electric power
system. The states and parameters of the power system are influenced by both controllable and
uncontrollable factors. The problem of voltage stability has been addressed by numerous papers
published around the world that discussed ways to tackle this pressing problem. For some years,
the increasing higher power demands and the

21
restricted growth of electric transmission systems have forced utilities to operate power networks
close to their transmission limit, this has created new voltage stability problems. While some
forms of disturbances resulting in changes in reactive power demand may trigger the process of
voltage instability, the causes of stressed systems are many [6]. The high cost of upgrading and
strengthening existing transmission lines to meet the increasing demand for electricity,
inadequate provision of new generating plants, the difficulty of acquiring way-leaves from the
rural dwellers are just a few reasons that lead to the increase of vulnerability in today’s
interconnected power system network. Power system operators are researching to enhance their
understanding of where the system is operating with respect to the point of collapse. This point is
often referred to as the critical point. The identification of the critical point indirectly defines the
boundary between the stable and unstable steady state operating region, the research for the
critical point is of importance. However, non-linearity gives rise to complex and unexpected
behaviour for many physical, chemical and biological systems. An interconnected power system
is not an exception for this complicated behaviour. A particular feature seen in many nonlinear
systems is the abrupt change in steady-state behaviour that may occur as a parameter changes
smoothly. The parameter values for which the abrupt change occurs generally correspond to
singular points in the governing equations. At a singular point, the Jacobian matrix of the
linearized system is singular and one real eigenvalue for the linearized system crosses the
imaginary axis at such a point. This is accompanied by qualitative change in behaviour. In power
systems, it can be related to voltage instability/collapse.
1.4 Purpose of the Study
From the points raised in section 1.3, it is clear that the state of the power system is influenced
by both controllable and uncontrollable factors. For example, the system generation must
increase as load increases to keep power balance and maintain voltage stability. Often at high
load levels, generators reach real and reactive power limitation and the power flows in lines
exceed limits. Any of these events can initiate a change in the equations that model the power
equation. This thesis is intended to achieve the following aims and objectives:

22
To model an interconnected electric power system network that will continually track
system changes and assess its voltage stability.
To predict the possible causes of voltage collapse in an interconnected electric power
systems like the Nigerian power system.
To access stability margin and power transfer limit in the system
To indicate sensitivities and the major contributing factors that will provide insight
into system characteristics to assist in developing remedial actions.
1.5 Scope of Study
Many researchers in voltage stability have proposed and adopted various techniques in solving
the problem of an interconnected electric power system network. This research is limited to
Modal/Eigenvalue analysis technique, which has been successfully applied to many international
interconnected power system networks and was shown to be very efficient [7]. However, the Q-
V Sensitivity, Q-V Curves, and participating factors were used to confirm the results obtained
from the analysis and to predict the stability margin based on reactive power demand.
The modal/eigenvalue analysis technique, Q-Vsensitivity, Q-VCurves, were implemented using
NEPLAN Simulation software implemented using power system analysis tools (PSAT) and
Matlab program. In this thesis, plots were extensively used to present the results. The relevance
is that with plots it is easier to identify patterns than tables of numbers. Researchers usually use
plots both to gain insight and present their research findings and ideas to others. Two systems
that were modelled and simulated in this thesis include an international sample test network, the
IEEE 14 Bus system and a Nigerian interconnected 330kV , 30Bus electric power system [11].
These systems were shown in Figure 1.1 and Figure 1.2 respectively. The Nigerian System was
also compensated and studied.

23
Figure 1.1 Line diagram of the IEEE 14Bus interconnected network
LD BUS 11
BUS 11
BRANCH 18
BRANCH 11
BRANCH 12
BUS 12
BRANCH 13
BUS 13
LD BUS 13 BRANCH 19
LD BUS 12
BRANCH 20
BUS 14
BUS 10
LD BUS 10
BUS 9
LD BUS 14
LD BUS 9
BRANCH 17
BRANCH 15
BUS 7
BUS 8 ˜ BRANCH 14
LD BUS 7
GN BUS 8
BRANCH 8 LD BUS 4
BUS 4
BRANCH 9 BRANCH 7
LD BUS 5
BUS 6
LD BUS 6 GN BUS 6 BUS 1
BUS 1
BRANCH 2
BRANCH 4
BRANCH 6
LD BUS 3
˜ GN BUS 3
BUS 3
BRANCH 3
BRANCH 5
BUS 2 BRANCH 10
LD BUS 2
GN BUS 2
BRANCH 1
˜
˜
BUS 5

24
~ ~
~
N12-Birnin Kebbi-B11 L175409
N-175397-Sokoto-B27 N148-Kano-B-18
L-764 N175463-Maiduguri-B28
L461
L413 L-175506
Gombe-B20
L-370
L-182 Sm-160
N16-Kainj-B6
B49-Jebba-GS-B2
Ms-176
L-773
N20-Jebba-TS-B8
L485
L389 L421
L-334
L-175420 L-373 Sm-347
B-93 ShiroroGS-B3
N152-kaduna-B17
N144-Shiroro TS B9
L437 L445
L-340 L469 B-53
L477 Jos-B19 N45
L-364 N175427 Abuja B30
L-175427 B-89 Ajaokuta B22
L541 B85-Bennin-B21
L405 N28-Oshogbo-B12
N28-Ibadan-B13 L-779
L405
L-201 L509 B33 Ikeja West B14
L501 L517 L-322
L557
L429 Makurdi-B29 N175475
L549 L-175482
B-77-Enugu-B26
L-304
L573 B69-Onitsha-B23
L735
L453
L-316 L573 N65-Aba -B24
N61 Sapele B1
~ L-669 N81 Delta-B7
L661 Sm-137202 L-597
~
N73 Afam-B5
Sm-823
L677 N57-Aladja B25
L645 L637
L677 B41 Akangba B15
L613 L605
L-629 L-292 N136 Egbin TS-B10
L-213
L621 L685 N140 Egbin GS-B4
B37 Aja-B16
L-286 ~
Sm-245
Figure 1.2 Line diagram of the PHCN 330kV, 30Bus interconnected network
L-310

25
1.6 Outline of the Thesis
This dissertation consists of six chapters.
Chapter 1 gives a brief introduction to the thesis where the background, purpose
of study, statement of the problem, the research motivation, the scope of study were
discussed.
In chapter 2, a literature review is presented, that discussed the problems of voltage
stability and voltage instability in electric power systems.Many voltage instability
incidents were recorded to have occurred around the world. Lists of incidents that result
in voltage collapse and those that did not result in voltage collapse were presented.Then,
a number of related published techniques has been discussed
Chapter 3 presents models for voltage stability investigation and assessment covering:
generators and their excitation controls, automatic generation control, modelling of static
var systems, modelling of power networks, and load model. A static modelling of
voltage stability for large system is presented. Also, the dynamic system is covered.
In chapter 4, the modal or eigenvalue analysis technique is discussed. The method is
used to provide a relative measure of proximity to voltage instability.
In chapter 5, a sample systems simulation and results were presented. System model,
Simulation results and analysis for IEEE 14Bus interconnected power system and
Nigerian 330kV, 30 Bus interconnected electrical power system were presented.
In chapter 6, the research conclusion, contributions and recommendations were
presented.

26
CHAPTER TWO
LITERATURE REVIEW
2.1 Electric Power System Stability
The continuing increase in the demand for electric power especially in developing countries has
been projected to far exceed the planned generation of existing power systems in the coming
decades. This has led to increasingly complex interconnected systems, which are forced to
operate ever close to the limits of stability because of the high degree of coordination required to
ensure system stability.
Traditionally, power system stability refers to the notion of whether synchronism of the
generators can be maintained following a disturbance. Physically, this requires a balance
between the mechanical power applied to each generator and its electrical power output.
Disturbances are typically categorized as small or large, depending on their severity. An
example of a small disturbance is the usual load variations during the day. An example of
a large disturbance is the outage of a major transmission line, or a sizable generator.
Analytically, small disturbance problems can be studied via linearization of the equations
describing the dynamic behaviour of the network, large – disturbance problems, however,
require nonlinear techniques. The system is said to be stable, if, following a disturbance,
it is able to reach an acceptable steady state. Electric Power System Stability is defined as the capability of a system to maintain an operating
equilibrium point after being subjected to a disturbance for given initial operating conditions
[12]. Electric Power System stability is primarily concerned with variations in speeds, rotor
positions, and generator loads.
It focuses attention on the transmission network, since it is the network, more than power plant
or system controls, which provides for the power shifts between generators required to maintain
synchronism.
Stability considerations have been recognized as an essential part of electric power system
planning for a long time. Depending on individual experience and viewpoint, there is no doubt
various explanations for the increased concern with stability. The underlying cause, however,
would appear to be very extensive interconnection of power systems with greater dependence on
firm power flow over ties.

27
This magnifies the undesirable consequences of instability and complicates the analytical process
through which acceptable system behaviour is assured. The possible consequences of instability
are loss of generation, loss of transmission facilities and loss of load.
Stability therefore denotes a condition in which the various synchronous machines of a power
system remain in synchronism or “in step” with each other. Conversely instability denotes a
condition involving loss of synchronism, or “out of step”. To understand the different aspects
and characteristics of power system stability, the following issues need to be considered [12, 13]:
1. Beside the highly non-linear nature of a power system, this system is continuously
subjected to changing operating conditions (e.g. loads, generation, etc.), hence, the
stability of the system depends on the initial operating conditions.
2. Power systems are usually subjected to a wide range of disturbances. These are classified
as small disturbances (e.g. load changes) or large disturbances (e.g. fault conditions). For
example, short circuits and transmission line outages can lead to structural changes from
the reaction of the protection devices to isolate the faulty elements.
Based on the previous discussion, power system stability is categorized based on the following
considerations:
1. The nature of the resulting instability mode indicated by the observed instability on
certain system variables.
2. The size of the disturbance which consequently influenced the tool used to assess the
system stability.
3. The time margin needed to assess system stability.
2.2 Classification of Power System Stability
Stability of system relates to stability of individual generators, individual loads, group of
generators, group of loads and the complete system considered as a whole. Based on the above,
stability can be classified into synchronous and asynchronous stability.
2.2.1 Synchronous Stability
Electric Power System generators connected through a transmission network run in synchronism.
Automatic load and frequency control systems and individual machine

28
speed-governing systems tend to keep generator speeds, and consequently speed differences,
within narrow bounds, but it is the effect of variation power flow through the network which
forces speed differences to be zero on the average.
If any generator runs faster than another, the angular position of its rotor relative to that of the
slower machine will continue to advance as long as speed difference exists, and its generated
voltage will likewise advance in phase relative to the voltage of the slower machine. The
resultant phase difference within limits shifts a load from the slow machine to the fast one,
tending to reduce the speed difference.
The shift in load between generators is a non-linear function of the difference in rotor angles, and
above a certain angle difference, nominally 900, the incremental load shift due to incremental
angle-change reverses, and the forces which tended to reduce speed differences become forces
tending to increase speed difference. This, in essence, is the loss-of-synchronism phenomenon.
As machines loose synchronism, current and voltage vary over wide ranges, to trip affected
generators and lines.
Power system engineers have found it useful to identify three types of unstable behaviour under
synchronous stability designated as dynamic stability, angle stability, steady-state stability and
transient stability.
2.2.2 Dynamic Stability
Small speed deviation occurs continuously in normal operation with corresponding variations in
angle differences and generator loads. If the variations resulting from any initial change diminish
with time, the system is said to be dynamically stable. Conversely, if these variations in the form
of oscillation increase with time, the system is dynamically unstable. Dynamic instability is more
probable than steady-state instability, or at least is more common in existence.
2.2.3 Angle Stability
It is defined as the ability of interconnected synchronous machines to remain in synchronism
[13]. Maintaining this synchronism depends on the synchronizing torque. The lack of sufficient
synchronizing torque leads to a periodic or non-oscillatory instability, whereas the lack of
damping torque leads to oscillatory instability. Angle stability is hence categorized as follows:

29
2.2.4 Small-disturbance Angle stability
This category refers to the system’s ability under small disturbances. Lack of sufficient damping
torque leads to oscillatory instabilities, which may be associated with Hopf bifurcations, as has
been discussed in a variety of power system models as well as in practice. Linearization
techniques of the system equations are used to assess the system’s stability for such small
disturbances. The time frame of this stability is in the order of 10-20seconds following the
disturbances.
2.2.5 The Steady-State Stability
The steady-state stability is that for which the system is designed and in which it normally
operates. The limit of steady- state stability is the maximum power that a system or a given part
of a system can transmit under the condition of gradually changing load without causing loss of
synchronism or instability between generators or groups of generators at separated point within
the system. Steady- state instability is a possible but improbable event on large power systems.
In the simplest hypothetical two-machine system, loss of synchronism will occur if an attempt is
made to operate with an angle separation between machines greater than 900 for real multi-
machine system, large angle differences also tend toward steady-state instability.
Between widely separated machines on a large system, angle differences may greatly exceed 900
with no threat of steady-state instability.
On the other hand, depending on the location and the characteristic of system loads, steady-state
instability may occur with angle difference less than 900.
In those systems where this kind of instability is a genuine hazard, operators are frequently able
to recognize limiting condition in terms of some gradual change, such as a sagging bus voltage,
and alter operation in time to avoid instability. If limiting conditions are exceeded, rates of
change increase enormously, and loss of synchronism with system break-up can occur within
seconds.

30
2.2.6 Transient Stability
Transient stability is primarily concerned with much larger deviations in steady-state operating
conditions that arise, for example, following faults. The analysis is primarily concerned with the
effects of transmission faults on generator synchronism.
There is no limit to the kinds of disturbances which can occur, but a fault on a heavily loaded
line which requires opening the line to clear the fault is usually of greatest concern. During a
fault, electrical power from nearby generators is reduced, perhaps drastically, while power from
machines somewhat removed from the fault may be scarcely changed. The resultant differences
in acceleration produce speed differences over the time interval of the fault, and it is important to
clear faults quickly to limit these speed differences and the associated changes in angle
differences. The time frame of these stability studies is in the order of 3-5 seconds following the
disturbances.
2.2.7 Frequency Stability
Frequency stability refers to the ability of power system to maintain steady frequency following
a severe system upset resulting in a significant imbalance between generation and load.
Instability occurs in the form of sustained frequency swings leading to tripping of generating
units and/or loads. The severe system upset is most commonly associated with conditions
following splitting of system into islands.
Stability refers to whether or not each island will reach a state of operating equilibrium with
minimal unintentional loss of load.
2.2.8 Asynchronous Stability
In asynchronous stability we take into account the effect of induction motors, arc furnaces and
lighting loads which normally affect the voltage in the system. Voltage stability has been the
main aspect of asynchronous stability.
2.3 Relation of Voltage Stability to Rotor Angle Stability
Voltage stability and rotor angle (or synchronous) stability are more or less interlinked. Transient
voltage stability is often interlinked with transient rotor angle stability, and slower forms of
voltage stability are interlinked with small-disturbance rotor angle stability. Often, the
mechanisms are difficult to separate.

31
There are many cases, however, where one form of instability predominates. An IEEE report
[14] points out the extreme situations:(a) a remote synchronous generator connected by
transmission lines to a large system (pure angle stability- the one machine to an infinite bus
problem) and (b) a synchronous generator or large system connected by transmission lines to an
asynchronous load ( pure voltage stability). Figure 2.1 shows these extremes.
(a) Pure angle stability
(b) Pure voltage stability
Figure 2.1 Simple examples showing extreme situations
Rotor angle stability, as well as voltage stability, is affected by reactive power control.
In particular, small-disturbance (“steady-state”) instability involving periodically increasing
angles was a major problem before continuously-acting generator automatic voltage regulators
became available.
We can now see a connection between small- disturbance angle stability and longer-term voltage
stability: generator current limiting (say by an over excitation limiter) prevents normal automatic
voltage regulation. Generator current limiting is very detrimental to both forms of stability.
Voltage stability is concerned with load areas and load characteristics.
~
Large System
Load Large System

32
For rotor angle stability we are often concerned with integrating remote power plants to a large
system over long transmission lines. Voltage stability is basically generator stability.
In a large interconnected system, voltage collapse of a load area is possible without loss of
synchronism of any generator.
Transient voltage stability is usually closely associated with transient rotor angle stability.
Longer-term voltage stability is less interlinked with rotor angle stability.
We can say that if voltage collapses at a point in a transmission system remote from loads, it is
an angle instability problem. If voltage collapses in a load area, it is probably mainly a voltage
instability problem.
2.4 Concepts of Voltage Stability and Voltage Collapse in Electric
Power Systems.
Many large interconnected power systems are increasingly experiencing abnormally high or low
voltages or voltage collapse. There are many incidents of system blackout, due to voltage
collapse, reported [15]. Abnormally high or low voltages and voltage collapse pose a primary
threat to power system stability, security and reliability. Excessive voltage decline can occur
following some severe system contingencies and this situation could be aggravated, possibly
leading to voltage collapse, by further tripping of more transmission facilities, var sources, or
generating units due to overloading.
Recently, increased attention has been devoted to the voltage instability phenomenon in power
systems. Voltage stability is concerned with the ability of a power system to maintain acceptable
voltage level at all nodes in the system under normal and contingent conditions. A power system
is said to have a situation of voltage instability when a disturbance causes a progressive and
uncontrollable decrease in voltage level. The voltage instability progress is usually caused by a
disturbance or change in operating conditions, which create increased demand for reactive power
[16] and [17]. This increase in electric power demand makes the power system work close to
their limiting conditions such as high line current, low voltage level and relatively high power
angle differences which indicate the system is operating under heavy loading conditions. Such a
situation may cause loss of system stability, islanding or voltage collapse.

33
The main problem facing many utilities in maintaining adequate voltage level is economic. They
are squeezing the maximum possible capacity for their bulk transmission network to avoid the
cost of building new lines and generation facilities.
When a bulk transmission network is operated close to the voltage instability limit, it becomes
difficult to control the reactive power margin for that system.
As a result the system stability becomes one of the major concerns and an appropriate way must
be found to monitor the system and avoid system collapse [18].
One of the major reasons of voltage collapse is the heavy loading of the power system, which is
comprised of long transmission lines. The system appears unable to supply the reactive power
demand. Producing the demanded reactive power through synchronous generators, static
capacitors, can overtake the problem [19]. Another solution is to build transmission lines to the
weakest nodes. Voltage collapse may occur due to a major disturbance in the system such as
generator outage or lines outage. In such a situation a protection system and proper control may
resolve the problem. Many voltage incidents have occurred throughout the world as shown in
Table 2.1 and Table 2.2.

34
Table 2.1 Voltage collapse incidents.
Date Location Duration
13 April 1986 Winnipeg, Canada
Nelson River HVDC link
1 second
30 Nov. 1986 SE Brazil, Paraguay 2 second
17 May 1985 South Florida 4 seconds
22 Aug. 1987 Western Tennessee 10 seconds
27 Dec.1983 Sweden 55 seconds
21 May 1983 Northern California 2 minutes
2 Sept.1982 Florida 1-3minutes
26 Nov. 1982 Florida 1-3minutes
28 Dec. 1982 Florida 1-3minutes
30 Dec. 1982 Florida 1-3minutes
22 Sep.1977 Jackson ville, Florida Few minutes
4 Aug. 1982 Belgium 4-5 minutes
20 May 1986 England 5 minutes
12 Jan. 1987 Western France 6-7 minutes
9 Dec. 1965 Brittany, France Unknown
10 Nov.1976 Brittany, France Unknown
23 July 1987 Tokyo 20 minutes
19 Dec.1978 France 26 minutes
22 Aug. 1970 Japan 30 minutes
22 Sept 1970. New York State Several hours
20 July 1987 Illinois and Indiana Hours
11 June 1984 North east United States Hours
Source [1]

35
Table 2.2 Incidents without collapse
Date Location Duration
17,20,21 May1986 Miles City, Montana, USA
HVDC link
Transient, 1-2 seconds
11,30,31 July 1987 Mississippi, USA Transient, 1-2 seconds
11 July 1989 South Carolina, USA Unknown
21May 1983 North California, USA Longer term, 2minutes
10 August 1981 Longview, Wash., USA Longer term, minutes
17 Sept. 1981 Central Oregon, USA Longer term, minutes
20 May 1986 England Longer term, 5minutes
2 Mar. 1979 Zealand, Denmark Longer term,15minutes
3 Feb. 1990 Western France Longer term, minutes
Nov. 1990 Western France Longer term, minutes
22 Sept. 1970 New York state, USA Longer term, minutes
insecure for hours
20 July1987 Illinois and Indiana, USA Longer term, minutes
insecure for hours
11 June 1984 Northeast USA Longer term, minutes
insecure for hours
5 July 1990 Baltimore,Washington .D.C
USA
Longer term, minutes
insecure for hours
Source [1]

36
2.5 Control Problems of Megawatts and Megavars in Electric Power
System
A clear understanding of the voltage control problem is hindered by tantalizing similarities
between it and the more familiar megawatt control problem, these similarities could underline
the differences.There is something of a dualism in the manner in which the two problems are
commonly perceived and formulated. The bus voltages are expressed in terms of their magnitude
and angles, which respectively are closely coupled to the flows of reactive and active power.
Hence the system state vector is the vector of bus voltage. However, in the megawatt control
problem as commonly conceived, attention is focused on control of the supply of active power in
order to track the load demand, with the maintenance of the angle elements of the state vector
within limits being a condition in the background, while in the voltage control problem, attention
is focused on control of the magnitude of the bus voltages, which are elements of the state vector
with the necessary supply of reactive power megavars being a condition in the background.
Another similarity arises from the characteristic of weak coupling, which results in the
localization of many disturbances. A significant feature of power system topology in granularity
in the associations of buses, i.e. the system consistof weakly coupled groups of tightly coupled
buses. This is reflected in the phenomenon of coherency; the associations of generators in non
overlapping groups such that those within a group are more tightly interconnected among them,
there are the group with each other. In responding to severe disturbances, machines within these
groups tend to maintain mutual synchronism while oscillating groups against each other. This
concept has found widespread use in the development of efficient programs for the analysis of
system stability. Also, a significant feature of the voltage phenomenon is a restricted range of
effect of changes in reactive power injections, which often results in a localization of voltage
disturbances. In this case, we may term the resulting groups of affected buses Voltage Zone,
which we defined as group of one or more tightly coupled generator buses, together with the
union of sets of load buses that they support.
It has been generally accepted that the sensitivity to changes of reactive power injection at a
given bus generally drops sharply beyond a closed cut set through the nearest PV (Voltage
controlled) buses, and have defined voltage ‘areas’ whose boundaries pass

37
through nodes containing strong Var support. Adjacent areas under this definition will merge
when one or more PV generators reach their reactive limits.
Each of these grouping of buses is a reflection of the granularity of power system networks. The
two groupings should be distinguished, since the sensitivity of bus voltage magnitudes to a
change in reactive power injection at given bus may follow the same pattern as that of bus
voltage angles to a change in active power injection at the same bus. Voltage zones can draw to
only a limited extent on external supplies of reactive power for support of internal voltage levels,
due in large part to the non-linearly increasing burden of reactive losses as tranmission line
loadings increase.
2.6 Nigerian 330kV, 30Bus Interconnected Electric Power
System
2.6.1 System Description
The electrical utility is probably the largest and most complex industry in the world. The
electrical engineer, who researches in this industry, will encounter challenging problems in
designing future power systems to deliver increasing amounts of electrical energy in a safe, clean
and economical manner [20]. The origin of the Nigerian Electric Power System can be traced to
the year 1898 [21], when a small generating plant was installed in Lagos. The first power
interconnection was a 132kV link constructed in 1962 between Lagos and Ibadan. By 1968, the
first National grid structure emerged with the construction of the Kainji Hydro project, which
supplied power via a 330kV, primarily radial type transmission network into the three numbers
132kV subsystems then existing in the Western, Northern and Eastern parts of the country. The
330kV and 132kV systems were initially run by two separate statutory bodies: - “Nigerian Dams
Authority “ (NDA) and “Electricity Corporation of Nigeria” (ECN) respectively. Central control
for the 330kV Network was co-ordinated from Kainji Power Supply control room while the
132kV network was run by load dispatcher located at Ijora Power Supply Lagos. These two
bodies were merged formally into single power utility- National Electric Power Authority
(NEPA) on 1st April, 1972; thus ushering in centralized regulation and coordination of the entire
rapidly growing 330kV and 132kV national network in Nigeria. The transmission network in
Nigeria is characterised by several outages leading to

38
disruption in the lives of the citizenry. According to Anil et al [22], the level of disruption is a
function of the dependency of people on electricity, which can be very high for a developed
country and not as much as developing countries. In Nigeria, the available energy generated is
not enough to meet the demands of the users leading to constant load shedding and blackouts.
The Nigerian power stations are mainly hydro and thermal plants. Power Holding Company of
Nigeria.(PHCN) generating plants sum up to 6200MW out of which 1920MW is hydro and
4280MW is thermal-mainly gas fired[23].The transmission grid system in Nigeria is
predominantly characterised by radial, fragile and very long transmission lines, some of which
risk total or partial system collapse in the event of major fault occurrence and make voltage
control difficult. These lines include Benin-Ikeja West (280Km) Oshogbo-Benin (251km),
Oshogbo-Jebba (249km) Jebba-Shiroro (244km), Birnin-Kebbi-Kainji (310km), Jos-Gombe
(265Km) and Kaduna-Kano (230km) [24].
These lines experience high voltages under light load conditions and very low voltages under
high loading conditions [23]. The Nigerian Electricity Network comprises 11,000km
Transmission lines (330kV and 132kV), the sub-transmission line (33kV) is 24,000km, the
distribution line (11kV) is 19000km, while the substations are 22,500 [25].

39
2.7 System Disturbances/Collapses in Nigerian Interconnected
Power System
Table 2.3 shows the system disturbances/collapse in Nigerian Power System from 1985 to
2000. Transmission faults and its effects caused most of the voltage collapse.
Table 2.3 Summary of System Disturbances of [NIPS] January –December ( 1985-2000)
Years (Jan-Dec) Total No. of Disturbances Average Duration Causes
2000 11 1-2hours More of Gen.
1999 9 3-4hours Gen/Trx.
1998 18 2-5hours Gen/Trx
1997 20 Unknown -do-
1996 10 6-7hours -do-
1995 11 2-4hours -do-
1994 5 3-5hours -do-
1993 19 1-6hours -do-
1992 3 Unknown -do-
1991 6 2-6hours -do-
1990 14 30minutes -do-
1989 16 Unknown -do-
1988 22 Hours -do-
1987 33 Unknown -do-
1986 13 Several hours -do-
1985 48 Unknown -do-
Source [26]
Table 2.3 when compared with Tables 2.1 and 2.2 shows the deplorable condition of the
Nigerian electric power system.

40
2.8 Reactive Power Compensation in Nigerian 330kV, 30Bus
Electric Power System Network.
System voltage is highly dependent on the flow of reactive power. The long transmission
lines in the National Grid generate considerable reactive Mvars which constitute serious
problems in maintaining system voltages within statutory limits especially, during light load
periods, system disturbance or major switching. The Nigerian system has many reactors
installed in various locations in the country the status of the reactors is shown in table 2.4.
We have incorporated these reactors in our simulation model to investigate the system
voltage stability.
Table 2.4 Status of Reactors in the Nigerian 330kV, 30Bus Interconnected
Electric Power System Network
Station Reactor
Nomenclature
Rating
kV Mvar Remarks
Kaduna 3R3 330 75 Good
Jebba 2R1 330 75 Good
Kano R1 330 75 Good
Gombe R1
R2
330
330
50
50
Good
Good
Oshogbo 4R1 330 75 Good
Benin 6R2 330 75 Good
Ikeja- West R1 330 75 Good
Source [27]
2.9 Methods for Voltage Stability Analysis
The theory of phenomena that surrounds power system voltage stability detection and
prevention is now a popular subject among the operating power system utilities and research
communities around the world. Electric Power Research [28] of the United States of America
Journal published in February 1991, reported on knowledge based support system for voltage
collapse detection and prevention [29] prepared by Howard

41
University. This report presented many analytical tools and their algorithm deals with the
question of detection and prevention of the subject.
The North American Electric Reliability Council (NERC) in August 1991 published a survey of
the voltage stability. The report recognises that the voltage stability collapse phenomenon has
been observed over the last 20 years around the world. However, this report recognises that
voltage collapse is not a surprise experience in electric power network, the focus of the
recommendation as on detection and mitigation during the system operation is that there is no
burden placed on system planners nor are standards suggested for planning robust power supply
system that can be automated against voltage collapse.
The Institute of Electrical and Electronic Engineers in 1991 released a report on voltage stability
of power system [30]. In this report, definitions, concepts, and analytical tools and industrial
experience are given. This report defines voltage collapse as the process by which voltage
instability leads to very low voltage profile in a significant part of the system. References [30
and 31] suggested techniques for voltage stability analysis.
This second publication of the IEEE working group on voltage stability gives a better
understanding and presented developed and specialised tools for analytical technique for this
subject. It reviewed the elementary considerations for this subject. The relation among voltage,
active power, and reactive power were reviewed in this report. The relations are derived using a
simple system model that serves as an aid to the interpretation of measured or calculated
performance of large system. It gave a step-by-step computation procedure using a conventional
power flow. The vast majority of reported methods and criteria used by utilities are based on
load flow analysis. This type of evaluation produces meaningful results only when applied with
careful modification to reflect the dynamic effect of key elements in a sequence of quasi-steady
state snapshots of the system behaviour. The same report introduced the theory and the
application of linear analysis. Two types of formulation are described namely; the Singular value
decomposition and Eigenvalue formulations. However, the techniques reported and
recommended in this report are selected and screened carefully based on first hand successful
applications. The report suggested that no single technique among those reported necessarily
provides all the answers needed for complete voltage stability

42
studies. The third publication [32] presented concepts, practices and tools. This publication
explained in detail basic theoretical and now well established concepts behind voltage stability
analysis in power system, as well as presenting and discussing various procedures and techniques
presently used for off-line and on-line voltage stability evaluation of a power system. It shows
minimum use of complex equations to facilitate the understanding of the diverse issues related to
this perennial power system problem.
Some of its chapters described a set of guidelines for voltage stability evaluation as well as all
the fundamental requirements for an on-line Voltage Stability Evaluation (VSE) Module of an
Energy Management System (EMS). Many papers had appeared in several Electrical engineering
Journals and conferences proceedings on the subject. In references [33 and 34] several
researchers attempted solving the voltage stability problem by using rotor angle stability. The
application of this effort for practical use has not been adopted because of the large
computational time required to solve transient, classical and long-term voltage stability type
problem(s).
Power system researches have developed advanced mathematical techniques and computation
simulation programme for voltage stability problem detection and prevention. Some of these
techniques are: Q-V sensitivity analysis [28], P-V curves, Q-V curves, modal analysis, minimum
singular value [35] and [36], reactive power optimization [37], artificial neural networks [38]
neuro-fuzzy networks [39], reduced Jacobian determinant, Energy function methods [40] and
[41], thevenin and load impedance indicator and loading margin by multiple power-flow
solutions. Time domain simulations are yet another approach to analysis. Sometimes these
different methods are mixed so that two different methods are presented simultaneously to gain
further insight into the phenomenon. Some of the approaches in power system engineering
literature are briefly discussed below:-
(1) Real power – Voltage (P-V) curve
The P-V curves, active power- voltage curves are the most widely used method of predicting
voltage security. They are used to determine the MW distance from the operating point to the
critical voltage. A typical P-V curve is shown in Figure 2.2 .Consider a single, constant power
load connected through a transmission line to an infinite –bus. Let us consider the solution to the
power flow equations, where P, the real

43
power of the load, is taken as a parameter that is slowly varied, and V is the voltage of the load
bus. It is obvious that three regions can be related to the parameter P. In the first region, the
power flow has two distinct solutions for each choice of P; one is the desired stable voltage and
the other is the unstable voltage. As P is increased, the system enters the second region, where
the two solutions intersect to form one solution for P, which is the maximum. If P is further
increased, the power flow equations fail to have a solution. This process can be viewed as a
bifurcation of the power flow problem. In a large-scale power system the conventional
parametric studies are computationally prohibitive.
The method of maximum power transfer by Barbier [42] determines critical limits on the load
bus voltages, above which the system maintains steady –state operation. These limits are
evaluated using a formula, which is an extension of the formula for the maximum power transfer
limit of a transmission line connected by two buses.
Figure 2.2 A Typical P-V curve
The most famous P-V curve is drawn for the load bus and the maximum transmissible power is
calculated. It has been observed that the maximum transmissible power increases when power
factor is leading, i.e. load compensation increases. Each value of the transmissible power
corresponds to a value of the voltage at the bus until V= Vcrit
50
100
150
200
250
300
350 400
450
0 0
200 400 600 800 1000 1200
tan (phi) = 0.4 tan (phi) = 0.2
tan (phi) = 0 Maximum loading point
tan (phi) = - 0.2
tan (phi) = -0.4
Normal range of operation
Real power (in MW)

44
after which further increase in power results in deterioration of bus voltage. The top portion of
the curve is acceptable operation whereas the bottom half is considered to be the worsening
operation. The risk of voltage collapse is much lower if the bus voltage is further away, by an
upper value, from the critical voltage corresponding to Pmax.
(2) Reactive power – Voltage (Q-V) Curve
Q–V or reactive power-voltage curves are generated by a series of power flow simulation. The
plot of the voltage at a test bus or critical bus versus reactive power at the same bus, the bus is
considered to be a Q-V bus, where the reactive output power is plotted versus scheduled voltage.
Most of the time these curves are termed Q – V curves rather than V – Q curves. Scheduling
reactive load rather than voltage produces Q – V curves. These curves are more general method
of assessing voltage stability. They are used by utilities as a workhorse for voltage stability
analysis to determine the proximity to voltage collapse and to establish system design criteria
based on Q and V margins determined from the curves.
Operators may use the curves to check whether the voltage stability of the system can be
maintained or not and take suitable control actions. The sensitivity and variations of bus voltages
with respect to the reactive power injection can be observed clearly. The main drawback with Q
– V curves is that it is generally not known previously at which buses the curves should be
generated.
As a traditional solution in system planning and operation, the voltage level is used as an index
of system voltage instability. If it exceeds the limit, reactive support is installed to improve
voltage profiles. With such action, voltage level can be maintained within acceptable limits
under a wide range of MW loadings. In reality, voltage level may never decline below that limit
as the system approaches its steady state stability limits.
Consequently, voltage levels should not be used as a voltage collapse warning index.
Figure2.3 shows a typical Q – V curve.

45
Figure 2.3 A Typical Q – V curve.
The Q axis shows the reactive power that needs to be added or removed from the bus to maintain
a given voltage at a given load.
The reactive power margin is the MVar distance from the operating point to the bottom of the
curve. The curve can be used as an index for voltage instability (dQ/dV goes negative)
Near the nose of a Q – V curve, sensitivities get very large and then reverse sign. Also, it can be
seen that the curve shows two possible values of voltage for the same value of power. The power
system operated at lower voltage value would require very high current to produce the power.
That is why the bottom portion of the curve is classified as an unstable region; the system can not
be operated, in steady state, in this region.
Accordingly, any discussion regarding such kind of operation is just educational. The steady
state voltage problem analysis will be focused on the practical range of the operating system; the
top portion of the curve. Hence, the top portion of the curve represents the stability region while
the bottom portion from the stability limits indicates the unstable operating region. It is preferred
to keep the operating point far from the stability limit.
In normal operating condition an operator will attempt to correct the low-voltage condition by
increasing the terminal voltage. However, if the system is operating on the lower portion of the
curve, the unstable region, increasing the terminal voltage will cause an even further drop in the
load voltage which results to an unstable situation.
MVar distance to critical point
Stable region
Unstable region
Operating point Q max Q
V
Stability Limit Vcri

46
The Q – V curves have several advantages [43]:
1. Voltage security is closely related to reactive power, where the reactive power margin for a
test bus can be determined from these curves.
2. Characteristics of test bus shunt reactive compensation (capacitor, SVC or synchronous
condenser), can be plotted directly on the Q – V curve.
The operating point is the intersection of the Q – V system characteristic and the reactive power
compensation characteristic. This is useful since the reactive compensation is often a solution to
voltage stability problems.
3. Q – V curve can be computed at points along P – V curve to test system robustness
4. The slope of the Q – V curve indicates the stiffness of the test bus.
Q-V curve technique is a general method of evaluating voltage stability [44].
It mainly presents the sensitivity and variation of bus voltage with respect to the reactive power
injection. Q-V curves are used by many utilities for determining proximity to voltage collapse so
that operators can make a good decision to avoid losing system stability. In other words, by using
Q-V curves, it is possible for the operators and the planners to know what is the maximum
reactive power that can be achieved or added to the weakest bus before reaching minimum
voltage limit or voltage instability.
Furthermore, the calculated Mvar margin could relate to the size of shunt capacitor or static var
compensation in the load area [45].
These curves are also called “nose -curves” due to their characteristic shape. The nose curve is a
graph of the active or reactive power in a node as a function of the node voltage. The point on
the nose-curve where the maximum power occurs is called the “critical point” and in literature is
often considered to be the voltage stability limit.
(3) Bifurcation Analysis
Bifurcation describes qualitatively changes such as loss of stability. Voltage stability is basically
a non-linear phenomenon and it is natural to use non-linear analysis techniques such as
bifurcation theory to study voltage collapse. Bifurcation theory assumes that power system
parameters vary slowly and predicts how a power system becomes unstable. The change of
parameter moves the system slowly from the equilibrium to another until it reaches the collapse
point. The system dynamics must act more quickly to

47
restor the operating equilibrium than the parameter variations due to change the operating
equilibrium.
Bifurcation occurs at the point where, due to some slow changes of parameter, the characteristics
of the system change. Bifurcation points indicate the zones where changes from stable to
unstable, from stationary to oscillatory, or from order to chaos occur and they are the most
interesting points in voltage stability studies. These changes may also take place simultaneously.
Usually, only one parameter, example load demand, is changed at once, in which case there is a
possibility to achieve either saddle node or Hopf bifurcation.
At the saddle node bifurcation, the stable and unstable equilibria coincide and disappear and the
Jacobian matrix becomes singular. Thus one of the eigenvalues (or singular values) must be zero
at this point. The saddle node point is a limiting point between stable and unstable areas. The
consequence of the loss of operating equilibrium is that the system state changes dynamically (
the dynamics can be such that the system voltages fall dynamically). The complex conjugate
eigenvalue pair is located at the imaginary axis at the Hopf bifurcation, in which case oscillation
arises or disappears. The Jacobian matrix is non-singular at the Hopf bifurcation.
(4) Sensitivity Matrix Techniques
Traditionally, voltage stability evaluations are based on the sensitivity coefficient technique
presented by [46]. However, it is very clear from [47-50] that the sensitivity coefficient
technique cannot be applied to large-scale systems because it is difficult to enumerate the
combination of the coefficients [47] proposed for this technique after the enhancement of [50,
51] to use sensitivity matrices for the detection of normal and strong P-Q and P-V stability.
Other sensitivity matrix techniques such as the one proposed by [52,53] adopted the transformer
tap changes in the sensitivity matrix. Reference [54] gave a clear definition of base vector and
margin vector for sensitivity matrix analysis, which also have their merits. Ven [55] initiated the
pioneering work in the use of the singularity of the Jacobian

48
equation for determination of voltage collapse nose points and the sensitivity matrix techniques
are based on this relationship.
(5) Scalar Performance Index Techniques
The scalar performance index technique is a better alternative technique to sensitivity matrix
approach for checking the voltage stability as demonstrated by [56 and 57]. Lachs [56] used the
scalar performance index to test voltage stability by the value of their performance index.
Reference [58] demonstrated the performance index for the specified load bus by checking the
index with bus voltage degradation.
These techniques are also power-flow-result dependent. Using this index approach, a global
index for voltage collapse detection is provided. However, this is not capable of computing sub-
network behavior of power system.
(6) Energy Function and Stability Region Assessment Techniques
The use of direct method for assessing the voltage collapse nose point is one of the most vital
attempts in voltage stability problems studies. The use of energy function method in power
system has had a long history of development in the power system literature. Several
refinements in recent years have made energy functions useful tools in supplementing time
domains simulation of individual fault scenarios. Reference[59] presented a general overview of
these methods when applied to dynamic or network models.
The basic idea of this technique is to create a scalar function of the state variable, also known as
a Lyapunov function or an energy function that can be evaluated for a given state at any point in
time to obtain a direct measure of the relative stability of the system [60].

49
.
This method had remained largely conservative due to the difficulty in obtaining a suitable
Lyapunov function [61], which does not require an expenditure of efforts comparable with the
efforts required to compute solution trajectories throughout a region of the space. The general
idea of the technique is to create a scalar function of the generalized state variable, which is
equal to a suitable function of energy or energy like variable in a system, and examine it as a
function of time determination of the region of stability.
(7) V-Q Sensitivity Analysis Techniques
The V-Q sensitivity analysis examines voltage stability at a given operating condition. V-Q
Sensitivity determines system voltage stability based on the size of the sensitivity of the bus
voltage magnitude to the reactive power injection at the same bus. Positive V-Q sensitivity
means that the voltage at the bus increases if reactive power is injected into the same bus. The
system is voltage stable if all the V-Q sensitivities are positive, and the system is voltage
unstable if V-Q sensitivity is negative for at least one bus. By computing V-Q sensitivities for all
the buses within the system, this technique gives a total picture regarding system voltage
stability.
(8)Analytical Methods
The analytical approach is usually based on continuous mathematical models of the components
of interest.
Today these models are not as detailed as the models used in computer simulation [62] and it is
therefore difficult to explain all events during a computer collapse simulation. The analyst often
works with the following systems description.
,, yxfx
o = g(x, y, λ) (2.1)

50
Where x represents state variables of the system (rotor angles and speed, etc) y represents the
algebraic variable (bus voltage magnitude and angles), and λ represents the real and reactive
power injections at each bus. The function f represents the differential equations for the
generators, and the g represents the power flow equations.
From this set of equations the analyst tries to figure out at which points the time solution changes
its behaviour qualitatively. These points are called bifurcation points and are associated with
eigenvalues of the Jacobian matrix J of (2.2).
yg
xg
yf
xf
J (2.2)
The trajectory of the eigenvalues then decides the system behaviour in the bifurcation points.
Schluter et al [62] indicate more than 10 different bifurcations existing in a power system
depending on which models are included in (2.1) and the degree of complexity of the models.
The point of collapse (PoC) is a point where a bifurcation occurs and is indicated in figure 2.4. If
the power is increased for the load in Figure 2.4, there will be a bifurcation in the system
Jacobian matrix when reaching the PoC [63].

51
V
↑
Figure 2.4 A PV-curve and a load characteristic where the load demand is increased. The
indicated point of collapse PoC comes from Hill and Hiskens, [64] and is also described by Pal
[63].
(9) Indexes and Sensitivity Methods for Voltage Stability Analysis
A bifurcation is of special interest. It is connected to the singularity of the power flow Jacobian
matrix.
vJJJJ
QP
QVQ
PVP
(2.3)
where the changes in active and reactive power are related to changes in angle and voltage. If the
Jacobian matrix is singular (non-invertible), the system has reached a point, where it has no
solution usually called a saddle node bifurcation. Kwatny, Pasrija and Bahar [65] studied the
problem by applying the bifurcation analysis to the load flow equations. They showed that a
static bifurcation associated with voltage collapse exists and at that point the load voltages are
infinitely sensitive to parameter variations.
1
0.8
0.6
0.4
0.2
0 0.2 0.4 0.6 0.8 1.0 1.2
Static Load Characteristics
PoC
Active Power P (p.u)

52
The minimum singular value or the smallest eigenvalue of the Jacobian matrix, can be used as a
“distance” or proximity indicator to this limit.
If the Jacobian matrix models the power flow equation, this singularity will coincide with the
point of maximum loadabiliy (PML). But if load behaviour, etc, are included (extended Jacobian
matrix) the singularity will indicate the point of collapse.
If ,0P the relationship between voltage change and reactive power change can be written as:
VRVPVPQQVQ JJJJJ ][ 1 (2.4)
This matrix JR is used as a state space matrix in the analysis. Efficient algorithms [66] have been
developed to calculate the minimum singular value for the reduced matrix JR which can be used
as a voltage stability index.
(10) Other Indexes
Sometimes the distance in MW or MVAr to the maximum transfer point on the PV-curve is used
as an index to calculate the point where the system voltage will collapse. A conventional power
flow program can be used if it is capable of capturing the system bahaviour near the bifurcation
point (the same point as PML when applying constant power loads).
There are two indices called VCPIPi and VCPIQi (Voltage Collapse Proximity Indicator)
presented in [67] that may be useful. They relate the total change of reactive power output to a
change in either active or reactive power in a node i.
i
gP P
QVCPI
i
(2.5)
i
gQ Q
QVCPI
i
(2.6)
The indexes are near 1 at off-peak load and grow to infinity at the collapse point.

53
(11)Time Domain Simulations
Dynamic simulations can be very useful in voltage stability studies. Two steady state solutions
might appear to be stable when using static methods, but it may be impossible for the system to
move from one stable operating point to the other without collapsing on the way. These kinds of
dynamic limitations can be found with time domain simulations.
The simulations are mostly performed with a computer program that uses detailed models of the
system components. Both the simulation program and the models used must be adapted to the
demands of long-term dynamic simulations to be useful in voltage stability studies. These
demands are not always the same as for the more common transient stability simulations with a
much shorter time perspective.
Time domain simulation can be used to investigate basic aspects in small power systems as well
as more complex phenomena in large systems. The main problem is then to collect relevant input
data. Usually, a time simulation only indicates if a disturbance is stable or unstable but, by
calculating indexes and sensitivities, this drawback can be reduced.
(12)Other Indexes
As long as generator current protection or limitation load dynamic and on load tap changer
(OLTC) behaviour dominate the system response, it is possible to divide the voltage collapse
course into several static phases and solve the load flow for each step.
In [68] the system response is divided into the following phases.
1. T = 0 to 1 second
Voltage excursion due to transient decay in generator flux and change in motor slip. At the
end of the period, voltage regulating equipment is affecting the voltage levels.
2. T = 1 to 20 seconds
Generator terminal voltage output levels are restored if not limited by VAR limits. Loads are
modelled with transient models.
3. T = 20 to 60 seconds
Current limiters may affect the output capacity of generators.
4. T = 1 to 10 minutes
Load tap changes in the distribution network restore customer load.
5. T = 10+ minutes

54
Automatic Generation Control (AGC) operators, etc. affect the behaviour of the system.
If phase-angle, combustion turbine starting etc. come into action during the same time frame
simulation could be necessary to reveal the system behaviour. Governor response on the turbine
should also be taken into account if they affect the distribution of power production.
(13) Modal Analysis Technique
Most of the approaches or methods considered so far use conventional power flow model to
represent the system steady state. This may not always be appropriate, especially as the system
approaches critical condition. Voltage stability analysis often requires examination of a wide
range of system condition and a large number of contingency scenarios [69, 70]. For such
applications, the approach based on steady state analysis is more attractive and, if used properly,
can provide much insight into the voltage/reactive power problem. Hence there is a need for
analytical tools capable of predicting voltage collapse in complex network system by accurately
quantifying voltage stability margins, and power transfer limits, identifying voltage – weak
points and areas susceptible to voltage instability, and identifying key contributing factors
(buses, transmission lines and generators) and sensitivities that provide insight into system
characteristics to assist in developing remedial actions.
The modal analysis approach has the objective of meeting the above requirements. It involves
the computation of a small number of eigenvalues and the associated eigenvectors of a reduced
Jacobian matrix which retain the Q-V relationships in the network and which includes the
appropriate characteristics of generators, loads reactive power compensating devices [7]. It
would be quite interesting to note that this method is parallel to the use of modal analysis for
small signal stability studies. However, by using

55
the reduced Jacobian instead of the system state matrix, the focus is on voltage and reactive
power characteristics.
The eigenvector of the Jacobian identify different modes through which the system could
become voltage unstable. The magnitude of the eigenvalue provides a relative measure of
proximity to instability. The eigenvectors, on the other hand, provide information related to the
mechanism of loss of voltage stability. However, power system engineers have for sometime
been using the modal analysis technique to study the Small Disturbance Angle Stability (SDAS)
problem [71 and 72]. Modal analysis for voltage stability assessment is different from that of
SDAS study thus, the purpose of SDAS study is to identify negative or poorly damped local and
inter-area oscillation modes with respect to angular stability and to recommend ways to improve
the damping of these mode.
2.10 Methods of Voltage Collapse Point Computation
The most common methods to estimate the proximity of voltage collapse point are [73]:
1. Determination of Minimum Singular Value Point
The minimum singular value of load flow Jacobian matrix has been proposed as an index for
quantifying proximity to the voltage collapse point. It is an indicator available from normal load
flow calculations. The computation of minimum singular value can be done fast with a special
algorithm.
The method is based on the analysis of linear system Ax = b. The singular value decomposition
of the matrix A is given in equation (2.7), where A ε Rmxm, U and W are m x m orthonormal
matrices, the left and right singular vectors u, and w, are the columns of matrices U and W,
respectively, Σ is a diagonal matrix (Σ = diag {σ1}] and σ1 is singular value.
m
i
Tiii
T wuWUA1 (2.7)

56
The singular value decomposition is applied to linearised load flow equations to analyse power
system voltage stability.
The analysis needs to be performed under the influence of a small change in the active and
reactive power injections [ΔP ΔQ]T to the change of angle and voltage [Δδ ΔV]T. The solution to
linearised load flow equations using the singular value decomposition is given in equation (2.8),
where [J] is the load Jacobian matrix.
QP
UWQP
WUQP
JV
TT 111 (2.8)
The inverse of minimum singular value, (min{σ1})-1, will indicate the greatest change in the state
variables, small changes in either matrix [J] or vector [ΔP ΔQ]T may cause major changes in [Δδ
ΔV]T. if min {σ1}is small enough. The minimum singular value is a measure of how close to
singularity the load flow Jacobian is. If the minimum singular value of the load flow Jacobian
matrix is zero, then this matrix is singular, i.e. the inverse of the Jacobian matrix does not exist.
The operating point does not have a load flow solution: in that case the sensitivity of the load
flow solution to small disturbances is infinite. The load flow Jacobian matrix singularity point is
also called the sadle node bifurcation point. Singular vectors can provide information about a
power system’s critical areas and components. The right singular vector corresponding to the
smallest singular value indicates sensitive voltages and angles. i.e. critical areas. The left singular
vector corresponding to the smallest singular value indicates sensitive direction for the changes
of active and reactive power injections. It is to be remembered that a Jacobian matrix is a
linearization at the operating point while the voltage stability problem is basically non-linear in
nature.
If the operating point is far away from the voltage collapse point, then the minimum singular
value does not describe the state of the system accurately. The minimum singular value of a load
flow Jacobian matrix is also sensitive to the limitations of generator reactive power transformer
tap-changer and compensation device. The minimum singular value method may be applied to a
reduced Jacobain matrix in order to improve the profile of the index.

57
2. Point of Collapse Method
The point of collapse method is a direct method. It computes the voltage collapse point, the
power demand and the corresponding state variables directly without computing intermediate
load flow solutions. This method is based on the bifurcation theory and the singularity of the
load flow Jacobian matrix.
The voltage collapse point corresponds to the loss of equilibrium, subject to the smooth changes
in parameters. The method is used to solve the singularity point of load flow equations by
formulating a set of equations which includes load flow equations and equations describing
conditions of singularity.
3. Optimisation Method
Another direct computation method of voltage collapse point is the optimisation method. In this
case, the voltage stability margin is maximised according to the flow equations and power
system constraints. When using notation similar to that in the point of collapse method, the
optimisation problem is set in equation (2.9).
)9.2(0,
arg
xftosubjectedinmstabilityvoltagetheMax
The solution to the optimisation problem overestimates the real voltage stability margin. Next, it
is estimated using linear interpolation technique in which generators are switched to operate at
the reactive power limit. A new optimisation problem starting from the previous solution is
computed. The procedure is repeated until all constraints are satisfied. The final solution is the
voltage stability margin.
4. Continuation Load Flow Method
The purpose of continuation load flow is to find a continuum of load flow solutions for a given
load/generation change scenario (.i.e. computation direction). It is capable of solving the whole
PV-curve. The singularity of continuation load flow equations is not a problem. Therefore, the
voltage collapse point can be solved. The continuation load flow finds the solution path of a set
of load flow equations that are reformulated to include a continuation parameter. Thus scalar
equation represents phase conditions that guarantee the non-singularity of the set of equations.
The method is based on prediction-correction technique. The prediction-correction technique
applied to the PV-curve solution is

58
illustrated in Figure 2.5. The intermediate results of the continuation process also provide a
valuable insight into the voltage stability of the system and the areas prone to voltage collapse.
The prediction step estimates the next PV-curve solution based on known solution. Taking an
appropriately sized step in a chosen direction to the solution path can make the prediction of the
next PV-curve solution. However, the prediction is not necessary, especially at the flat part of the
PV-curve. The simplest prediction is the secant of the last two PV-curve solutions. The
computation of the secant is fast and simple.
The tangent of last PV-curve solution is more accurate than the secant, but also requires more
computation. The advantage of tangent direction is most valuable around the PV-curve nose. The
step size should be chosen so that the predicted solution is within the radius of convergence of
the corrector. The determination of step size can be based on the slope of tangent or the
difference between previously predicted and exact solutions.
Figure 2.5 PV-curve solution using prediction-correction technique
The inexact estimate is corrected using slightly modified load flow equations at the correction
step which is based on .e.g. local parameterisation, where one state variable is constant during
the computation of correction step. In Fig. 2.5 the constant state variable is the continuation
parameter at the first two corrections and the voltage at the last correction. There is no restriction
for the continuation parameter, but usually it is the increment of the total load. The maximum
loading point can be sensed easily using the
Maximum loading point
Corrector
Predictor
Parameter

59
tangent vector of PV-curve solution. The tangent component corresponding to the continuation
parameter is zero at the maximum loading point and becomes negative beyond the maximum
point. This method indicates whether the maximum loading point has been passed or not. The
exact location of the maximum loading point requires the searching with decreasing step size
around the maximum point, which is why the point of collapse method and the optimisation
method are more effective than the continuation load flow in finding the exact voltage collapse
point. The components of the tangent vector are different changes in the state variables (voltages
or voltages angles) in response to a differential change in system load (continuation parameter).
The tangent vector can be used for a sensitivity analysis so that a stability index and
identification of weak buses are obtained. A good method to decide which bus is nearest to
voltage stability limit is to find the bus with the largest ratio of differential changes in voltage to
differential change in active load for the whole system. The ratio can also be used as a voltage
stability index.
2.11 Comparison of Computation Methods of Voltage Stability
For making a comparison of the computation methods, it is important to note that all the methods
have different functions. They have their own strengths and weaknesses. The combination of all
these methods may be tried to get the best information in voltage stability analysis.
The minimum singular value, the continuation load flow and the maximum loading point
methods compute intermediate results for PV-curve. These methods provide valuable
information in the form of voltage stability indices for indicating proximity to the voltage
collapse point and identifying the weakest buses. The algorithms are easy to implement because
they are based on load flow equations. The intermediate results of these methods can also be
used for a quick and approximate analysis of voltage stability in on-line applications. The
number of equations is about the same as that in load flow. The implementation of device limit
handling is also relatively easy. However, the computation process may be substantially slowed
down when the system considers many limits.
The point of collapse method and the optimisation method compute the exact voltage collapse
point using a direct method. These methods also provide information related to

60
weak areas and to voltage stability enhancement. However, both the methods require good initial
values in order to converge quickly and correctly. Another drawback is the inclusion of
inequality constraints, like generator reactive power limits, in the problem, which require
additional logic to repeat the basic procedure until all constraints are satisfied. Although the
computation is fast enough and converges nicely. The inclusion of inequality limits sometimes
causes convergence problems. Another obvious disadvantage of these methods is the high
computational burden, as the number of equations increases almost twice with respect to the
power system load flow equations. The point of collapse method also has convergence problem
when the system is far from the collapse point, especially when device limits are encountered
along the solution path.
The continuous load flow method is probably the best for on-line application. It is accurate,
reliable and moderately fast. The reliability is based on the fact that it has no serious
convergence problems due to device limits, but the convergence may slow down due to this. The
implementation of continuous load flow is also much easier than the point of collapse method or
the optimisation method.

61
CHAPTER THREE
POWER SYSTEM MODELLING
3.1 Philosophy of Engineering Modelling
Electrical power network is concerned with complex system, which either already exists or is
being planned for the future. Because of the size of these systems, it is therefore necessary to
resort to investigation based on models. A model is a representation of the more important
properties of a system that can be used to predict the behaviour of the system over a range of
operating conditions in its operating environment [74]. Models may be physical or mathematical.
The physical models are the laboratory models like a switching and transmission systems, which
are used to evaluate their performance and to connect design faults before systems are put into
manufacture. However, mathematical models range from simple tables and graphs to
complicated sets of equations and logarithms for performing computer simulation. However,
diagrams and maps are also models and are extensively used in studies on electric power
networks.
3.2 System Modelling Effect on Power System Operation
Power system in general is an interconnection of millions of electrical and mechanical devices.
Hence, the variety of phenomena exhibited by a particular power system is immense because of
the equipment connected. The following description includes only the relevant characteristic of
which only a subset will be retained by the thesis model. A typical power system can be viewed
as an enormous nonlinear electric circuit. This implies that the model should retain the
fundamental characteristic of electric circuit and the dependence of state variable on circuit
parameters.
Many power system phenomena are initiated by the aqqregate effect of changing loads. The
model should have the ability to partially account for the response of interconnected generators
to fluctuating demands. As load increases the rotational speed and frequency of individual
generators decreases. A control system using frequency as a feedback increases the mechanical
input to the generators, which in turn results in increased electrical output and restoration of
frequency.
When the system is unstable or marginally stable, a small disturbance may propagate and grow,
eventually causing cascading operation of protective devices.

62
Even when the system is stable, large random disturbance such as lightning can propagate and
trip protective devices. These phenomena although very essential to power system operation are
not included in the model used in this work. This is because this work has considered including
in its model as many of the generation parameters and characteristics that can reasonably be
controlled or forecast. For instance, it did account for the steady state evolution of a power
system due to protective device and system operation including generator limits, but ignored the
transient effects caused by operation of the protective devices. Also the transient behavior,
protective device co-ordination, or instantaneous limits were not considered in the model.
Furthermore, we did not model the large disturbance response of a stable power system or the
dynamic analysis power system. The type of modeling applied in this thesis is classified as
“steady-state” or static which analysis uses Modal analysis technique.
With a cumulative increase in power demand, system voltages may decline, initiating several
activities such as:-
(i) On load tap changing transformers (OLTCT) adjust tap positions to maintain load side
voltages.
(ii) Shunt capacitors are switched in to provide reactive power support.
(iii)Fast starting back-up generators may be brought on-line.
The characteristic of changing system equipment and structure as a function of system state is a
feature to be incorporated in system model for assessment. When power demand and generation
increase, so do the flow and losses on the transmission lines as well as the flow and losses in the
circuits and devices that make up each generating unit. As the power flow on transmission line
increase, this causes temperature rise of the conductors, which results in a loss of mechanical
strength and increased sag. The increased sag can cause a line to become dangerously close to
ground increasing the possibility of flash over and faults. A faulted line can lead to momentary
or prolonged outage of the line. Extended operation of a line beyond its thermal rating can
permanently reduce the strength of the line. Once lines become overloaded, generation is re-
dispatched to relieve the overloads, and in some cases, the lines are interrupted to prevent permanent
damage.The power system model also should account for the operation of protective devices and
changes in system operation policy resulting from the condition of the system. This

63
implies that every change in load or generation, switching of a device, or tap change at a transformer
would be a disturbance to the entire power system. The disturbance may also be as a result of random
events like lightning strike and short circuit. If the system is stable, the control and dynamics will behave
in such a way as to move the system state towards a new equilibrium after the disturbance. As the
system becomes less stable, the rate at which the system approaches equilibrium after every
disturbance decreases. The duration of time for which the transient effects of disturbance dominate
increases as the stability of the system decreases. More so, significantly large disturbance can cause the
system state to diverge from the equilibrium (Hopf bifurcation) or for the equilibrium to disappear (SNB)
When the system is unstable or marginally stable, a small disturbance may propagate and grow
eventually causing capacity operation of protective devices. Even when the system is stable,
large random disturbance such as lightening can propagate and trip protective devices. These
phenomena although very essential to power system operation, are not included in the model.
This is because the research has considered including in the model as many of the generation
parameters and characteristics that can reasonably be controlled or forecast.
3.3 Models for Voltage Stability Investigation and Assessment
Because contemporary power systems are so large, power system analysis programs do not
usually model the complete system in detail. This problem of modelling a large system arises for
a number of reasons including:
Practical limitations on the size of computer memory.
The excessive computing time required by large power systems, particularly when
running dynamic simulation and stability programs.
Parts of the system far away from a disturbance have little effect on the system dynamics
and it is therefore unnecessary to model them with great accuracy.
Often parts of large interconnected systems belong to different utilities, each involving
their own control centres which treat the other parts of the system as external
subsystems.

64
In some countries private utilities compete with each other and are reluctant to disclose
detailed information about the business. This means that vital data regarding the whole
system may not be available.
Even assuming that the full system data is available, maintaining the relevant databases
would be very difficult and expensive.
To avoid all these problems only a part of the system called the internal subsystem, is modelled
in detail. The remainder of the system, called the external subsystem, is represented by simple
models referred to as the equivalent system or simply as the equivalent.
Power systems components models are selected according to the purpose of the system study,
and hence, one must be aware of what models in terms of accuracy and complexity should be
used for a certain type of system studies, while keeping the computational burden as low as
possible. Selecting improper models for power system components may lead to erroneous
conclusion. Voltage stability analysis and simulations are represented using mathematical
models, in these cases the components are represented using their equivalent electrical circuits.
The models of power system elements that have a significant impact on voltage stability studies
are:
Generators and their excitation controls
Automatic generation control (AGC)
Static Var systems (SVSS)
Loads
3.4 Generators and their excitation controls
Generators are important in system stability studies, and are modelled in dissimilar ways
depending on the objective of the study. For instance, in a power flow study, the following
generator models are considered: (i) Slack generator (ii) PV generator.
Slack generators are modelled as fixed voltage magnitude and phase buses, as follows
[75]:

65
1.300 VV
In case of distributed slack bus model, the last two parameters andP0 are mandatory and the
following additional equation holds:
01 PkGP (3.2)
Where kG is the distributed slack bus variable, γ is loss participation coefficient, 0P is active
power guess, if not specified, γ is assumed to be γ = 1.
(ii) PV generator
PV generators fix the voltage magnitude and the power injected at the buses where they are
connected, as follows [75]:
0VVPP g
(3.3)
Where gP is active power and 0V is voltage magnitude
In case of distributed slack bus model, the active power equation becomes:
gPkGP 1 (3.4)
For other complex analysis, such as small-disturbance stability, it may be required to use either
generator subtransient or transient stability models that are represented by means of differential
algebraic equations.
The per unit stator voltage equation for generator detailed model in dq reference frame are
typically written in [16]:
qardqq
darqdd
iReiRe
(3.5)
where ed and eq are the instantaneous stator phase voltages: ρ is the differential operator d/dt ; id
and iq are the instantaneous stator phase currents; ψd and ψq are the flux linkages; ωr is the rotor
electrical speed; and Ra is the armature resistance per phase.
The two most common simplifications in obtaining generator stability models are: First, neglect
the stator transients, which are represented by the ρψd and ρψq terms in( 3.5), these terms are
associated with network transients, which decay rapidly. Second, neglect the effect of speed
variations on stator voltages, i.e. ωr = 1 in (3.5). In addition to the

66
above mentioned simplifications, other assumptions, such as balanced voltages with slowly
varying phase and angle, yield generator stability models represented by differential equations
with orders ranging from 11 ( classical model ) to V1 (subtransient model) [75].
For instance, a generator subtransient model is obtained assuming two q-axis and one d-axis
damper windings on the rotor, and X!!d = X!!
q where X!!d and X!!
q are subtransient reactances . On
the other hand, a generator classical model is obtained by modelling the generator as a constant
voltage source behind a reactance, and hence, only two differential equations are used to
represent the electromechanical swing equation.
A generator is normally equipped with an exciter for primary voltage control and a governor for
frequency control. Fast exciters are known to enhance generator synchronizing torque, but may
deteriorate the damping [76], and hence, for some generators, a power system stabilizer (PSS) is
installed to improve the damping.
Several types of exciters, governors and PSS, are readily available [13], and are incorporated in
most small-disturbance stability and transient stability analysis programs, such as the power
system toolbox (PST) [77].
These models are not typically modelled in a power flow study; however, they have to be
adequately represented in an eigenvalue analysis (small-disturbance analysis) or a transient
stability analysis.
For eigenvalue studies (small signal stability analysis), it is necessary to include the effects of the
excitation controller, which indirectly controls the reactive output of a generator. A simple
Automatic Voltage Regulator (AVR) model is used here to represent the excitation control of the
generators, as shown in figure 3.1 [78, 79]

67
Figure 3.1 AVR and exciter model for synchronous generator, where SE is the saturation effect,
all ks are constant gains, and all Ts are time constants.
In voltage stability and long-term stability studies, it is important to consider the reactive
capability limits of synchronous machines. The continuous reactive power output capability is
limited by field current limit and armature current limit. The generator is equipped with a
modern microprocessor-based voltage regulator. The regulator can control terminal voltage, field
current, reactive power or power factor .
To enhance angular stability, a power system stabilizer (PSS) is included.
The voltage regulator is equipped with both a delayed field current limiter and a delayed
armature current limiter .
The delayed field current limiter protects the field winding and the exciter from thermal
overload under stressed operation conditions. The delay permits a temporary overload of
the generator to support the network with extra reactive power (at constant active power)
before the limiter is activated, which brings the field current down to its limit.
The delayed armature current limiter protects the armature winding from thermal
overload under stressed operational conditions. Similar to the delayed field current
limiter, the delay permits a temporary overload of the generator.
VTR
VREF VS(PSS)
VRMAX
VRMIN
∑ ∑ 1 . 1 + sTR
1 + sTC. 1 + s BT
KA . 1 + sTA
1 . sTE
ES + KF
+
-
+ +
sKF . 1 + sTF
VFB

68
The behaviour of these delayed limiter is illustrated in figure 3.2 for a constant overload
situation.
Figure 3.2 Principal operation for delayed current limiter at constant overload.
Where t1= delay time, t2 = limitation time, t3 = recovery time
The delay time t1 has a minimum value of a couple of seconds. An integrator, that uses the
difference between the measured current and the current limit as an input, adjusts the time t1 to
optimize the use of the generator’s thermal capability. The recovery time t3 is the time the
generator needs to cool before it can allow a new temporary overload. If the current for any
reason should exceed the limit again before the recovery time has past, the limiter acts
momentarily.
Since the field winding is fed from a static exciter the voltage regulator is also equipped with an
instantaneous field current limiter.
The instantaneous field current limiter protects the semiconductors in the static exciter,
which have very short-thermal time constants, from faults of short-circuit character in
the field circuit. This function is of little important for voltage stability studies.
All three limiters limit the current by decreasing the field voltage. As soon as one of the limiters
is activated, the terminal voltage of the generator will start to decrease.
Their models and describing equations are represented. The field current limitation model is
shown in figure 3. 3
1t 2t
3t
Limited
Time
I

69
gE
0.1E
Figure 3.3 System model for field current limitation
where δ is the voltage angle over x and ψ the angle over xg. n is the tap step, Qg is the reactive
power production in the small generator Eg is the voltage at the large generator. X reactance for
one transmission lines, Xg internal reactance during field current limitation.
The reactive power balance at the Bus small gives
0cos 2
2
gQxn
VnxEVQ (3.6 )
The active and reactive power output from the limited generator can be written as
sing
gg nX
VEP (3.7)
2
2
2
1
g
gg
g
g
gg VE
nXPnX
VEXn
VQ ( 3.8)
The capacity at the load point can be written according to
2cos1, nXEVPnVP g (3.9)
Where
2
111cos
g
gg
g
g
g VEnXP
EXXE
XXEnVX ( 3.10)
The armature current limitation model is shown in figure 3.3
Pg1Qg
Xg
X 0
1 0V
1 : n P1, Q = 0
V
small

70
Figure 3.4 System model for armature current limitation.
The capacity for armature current limitation can be calculated using figure 3.4. The reactive
power balance equation at the small generator terminal is in this case identical to equation (3.6)
and the reactive power output from the small generator can be written as
22
1gg P
nVIQ
(3.11)
The system capability P1 becomes
21 cos1,
nXEVpnVP g (3.12)
Where
22
1cos gPn
VIEVnX
EnV
(3.13)
In order to find a relationship for maximum load ability during armature current limitation , we
assume that the variables E, X, I, and n are constants.
The voltage dependence of the load is also neglected to allow straight forward calculations.
However, a voltage independent load may be used to show qualitative relationships. Taking the
derivative of equation (3.12) with respect to Pg we find
2
22
122
1
22
1
1
1
1
gg
gg
g
Pn
VIEVnX
nEVP
nVI
Pn
VIEVnX
nEVP
PP
(3.14)
Combining with (3.11), (3.13), (3.14) gives
Pg,Qg
I1
x
0.1E
01 0V
1 : n P1, Q = 0
V
small

71
2
1
cos1
cos1
g
g
g Q
PPP
(3.15)
By taking the zero value of equation (3.15) we find
2cos1
cos
g
g
PQ
(3.16)
Which is the maximum loadability point.
3.5 Automatic Generation Control (AGC)
This is a mechanism to restore frequency and net interchange power to scheduled values by
integral control by adjusting the output of selected generators. This function is commonly
referred to as load-frequency control (LFC). A secondary objective is to distribute the required
change in generation among units to minimize operating costs, this is commonly referred to as
economic dispatch.
We will discuss a model for only the faster load-frequency control which acts to maintain
scheduled system frequency and scheduled net power interchange. Following a large disturbance
(generation loss), AGC acts during a slowly developing voltage instability. The time frame is
roughly 0.5 to 15 minutes following the disturbance. The model for AGC in the multiarea system
can be realized by studying the AGC for a two-area system .Consider two areas represented by
an equivalent generating unit interconnected by a lossless tie line with reactance Xtie. Each area is
represented by a voltage source behind an equivalent reactance as shown in figure 3.5
Figure 3.5 Equivalent network for a two-area power system
X1 Xtie X2
E2 2 E1 1

72
During normal operation, the real power transferred over the tie line is given by
1212
2112 sin
XEE
P (3.17)
Where X12 = X1 + Xtie + X2 , and .2112
Equation (3.17) can be linearized for a small deviation in the tie-line flow 12P from the nominal
value, i.e …
121212
1212 120
SP
ddPP (3.18)
The quantity SP is the slope of the power angle curve at the initial operation angle
.2010120 This is defined as the synchronizing power coefficient by
12012
21
12
12 cos129
X
EEddPPS (3.19)
The tie-line power flow appears as a load increase in one area and a load decrease in the other
area, depending on the direction of the flow.
The direction of flow is dictated by the phase angle difference; if ,21 the power flows
from area1 to area2. A block diagram representation for the two-area system with LFC
containing only the primary loop is shown in figure 3.6
Let us consider a load change1LP in area 1. In the steady-state, both areas will have the same
steady- state frequency deviation, i.e,
21 www (3.20)
and
11121 DPLPP Wm
2122 DPP wm (3.21)

73
Figure 3.6 Two-area system with only primary LFC loop.
The change in mechanical power is determined by the governor speed characteristics, given by
11 R
P wm
(3.22)
22 R
P wm
(3.23)
Substituting (3.23) and (3.22) into (3.21),and solving for w , we have
ΔPref1(s)
ΔPref2(s)
1_ R1
1_ R2
sTg111
1___ 1+T1s
ΔPv1
ΔPv2
sTg 211
ΔPL1(s)
Governor Turbine Rotating mass and load
1___ 2H1s+D1
Δw1(s)
+ Δw2(s)
+ Ps_ s
ΔP12
-
-
-
- Rotating mass and load
1___ 2H2s+D2
1___ 1+T2s
Turbine Governor
+
+ +
+
+

74
212
21
2
11
11
lL
w
P
DR
DR
P (3.24)
Where
11
11 DR
(3.25)
22
21 DR
(3.26)
21 and are known as the frequency bias factors. The change in the tie-line power is
1
1
21
2
22
11
22
1211
1
l
l
PD
RD
R
PDR
P
(3.27)
Where R is composite governor droop of all generators in the area and D is composite load
damping.
The area frequency response characteristic is routinely calculated at control centres following
loss of generation in other control areas .The equation is
w
netmeas
P
int (3.28)
Where intnetP the measured net change or deviation in the line is power flow and w is the
measured change in system frequency (speed). The tie line power and the frequency
measurements are made after primary prime mover control (governor) action is largely complete,
and the system is temporarily quiescent.
Related to equation (3.28), the system frequency or speed after prime mover control action is due
to the frequency response characteristics of all control areas in the interconnection. We can write
ii
Pw
(3.29)
Where P is the generation loss.

75
3.6 Modelling Of Static Var Systems.
A static var system (SVS) is an aggregation of static var compensators SVCs and mechanically
switched capacitors (MSCs) or reactors (MSRs) where outputs are coordinated [80, 81, 82].
Static var compensators are shunt-connected static generators and/or absorbers whose outputs are
varied so as to control specific parameters of the electric power system.The term “static” is used
to indicate that SVCs, unlike synchronous compensators, have no moving or rotating main
components. Thus an SVC consists of static var generator (SGV) or absorber devices and a
suitable control device.
The basic types of reactive power control elements which make up all or part of any static var
system are:
Saturated reactor (SR)
Thyristor-controlled reactor (TCR)
Thyristor-switched capacitor(TSC)
Thyristor-switched reactor ( TSR)
Thyristor-controlled transformer (TCT)
Self-or line-commutated converter (SCC/LCC)
Since their first application in the late 1970, the use of SVCs in transmission system has been
increasing steadily. By virtue of their ability to provide continuous and rapid control of
reactive power and voltage, SVCs can enhance several aspects of transmission system
performance. Application to date include the following;
Control of temporary (power frequency) over voltages.
Prevention of voltage collapse
Enhancement of transient stability
Enhancement of damping of system oscillations.

76
A typical SVS is shown in Figure 3.7 It consists of a TCR and switched (thyristor or mechanical
) capacitors.
Figure 3.7 Schematic of a typical SVS
S- thyristor or mechanically controlled switch.
In stability studies, the modelling of an SVS of the type shown in figure 3.7 can be represented
by a functional block diagram as shown in Figure 3.8. The stability model may be developed by
identifying the mathematical model for each functional block.
Figure 3.8 SVS Functional block diagram
Controller Vref
Transformer
HV bus
PT
V2
V1
S S
Filter
1, V bus
I2
Capacitor Switching logic
Measuring circuit
Voltage regulator
VR max
Other signals
Vref Σ Σ TCR Interface B2 Bsvs LVBus HV bus
V2 Is
Bc
VR min
Vm
+
+
-
+

77
In modelling of static var compensator, let Bsvc be the shunt susceptance of the SVC
corresponding to the MVAR loading of it. It is then added to the susceptance at the busbar. The
total susceptance is given by B. A reduction in the controlling voltage V will cause the desired
susceptance B to increase, causing MVAR output of SVC enhanced.
The SVC injected current into the bus is then given by
VYI ( 3.30)
Here, jBGY (3.31)
[G may be assumed to be zero here.]
The MVA output of the SVC is given by
SVCVIS
and
BUSSVC BBVQ 2
(3.32)
3.7 Modelling Of Power Network
A real-life power system comprises a large number of buses that are interconnected by means of
transmission lines. Power is injected into a bus from generators, while the loads are tapped from
it. There may be some buses with no generation facilities and some buses may have VAR
generators attached to them. The surplus power at some of the buses is transported via
transmission lines to buses deficit in power. To easily understand these arrangements, a two-bus
system is shown in Figure 3.9.
Fig.3.9 A two-bus system
IPP
Load cQ
G G
S1=P1+Q1
S2=P2+Q2 R+jX
Gen. Center Load Center

78
In large power networks, the mathematical modelling will be as follows: Let Ii = injected current
at node i (i = 1, 2, …., n ) ij
ii eVV (voltage at node i) (3.33)
The current Ii can be expressed as a function of the voltages. Thus,
)(
,...,2,1),(
ij
jiijiiii
niVVyVyI
(3.34)
α(i) designates the subset of the nodes connected to node i and
)(
;/ 1
ij
jij
ijijijii
ijeyZ
yyy
(3.35)
In general form, the preceding equations can be written as
,VYI (3.36)
Where Yij = Gij + jBij ; Yii = Gii + jBii and 22 ;ij
ijij
ij
ijij z
xB
zr
G
ij ij
ijijiiijijii BbBGgG
,
Also, at node i, iiii IVjQP
However, iV is complex conjugate of Vi and hence
Pi = Real
ikjiijiiii VVyvyV
(3.37)
and
ikjiijiiiii VVyVyVQ
Im (3.38)
Simplification yields
ij ij ij
ijjiijijjiijijijii PyVVgyVP
coscos2 (3.39)
and
ij ij ij
ijjiijijjiijijijii QyVVbyVQ
sinsin2 (3.40)
where Pij and Qij denote the active and reactive powers through the line connecting the ith
and jth nodes.
Obviously,

79
jiijijjiijijijiij yVVgyVP coscos2
(3.41)
and ijijijjiijijjijji yVVgyVP coscos2 (3.42)
jiijijjiijijijiij yVVbyVQ sinsin2
(3.43)
ijijijjiijijjijji yVVgyVQ sinsin2 (3.44)
3.8 Load Modelling
The modelling of load is very essential and continues to be a controversial aspect of voltage
stability evaluation, as different load models has been shown to produce different simulation
results [83 and 84].
The modelling of loads is complicated due to the unclear nature of aggregated loads (e.g. a mix
of fluorescent, incandescent lamps, refrigerators, heaters, motors, etc.). A typical high voltage
bus is an assembly of different consumers with varying mix of different devices. This
composition may change depending on the time of the day, weather condition or state of the
consumer economy. In analysing voltage instability, it is necessary to consider the network under
various voltage profiles. Voltage stability depends on the level of current drawn by the loads.
Hence, voltage instability analysis requires a model of how the load responds to load variations.
Load models are typically classified into two load categories; static and dynamic.
One way to describe the static voltage power relation is to use the relations:
2
02
1
01
0
000
vva
vva
vvaPP
and
2
02
1
01
0
000 v
vbvvb
vvbQQ ( 3.45)
Where P and Q are active and reactive power loads respectively while Po and Qo are the powers
at voltage Vo. The relations in equation (3.45) are called a polynomial load

80
model. The three terms correspond to a constant power fraction, a constant current fraction, a
constant impedance fraction. The sum ao + a1 + a2 and bo + b1 + b2 are equal to 1 but there is a
choice to restrict each component to the interval [0,1] or let them vary freely. It is also possible
to use an exponential load model:
00 v
vPP and
00 v
vQQ (3.46)
Values for the parameters of these static load models can be found for instance in [85, page 73]
Electrical loads may also have a dynamic voltage dependence. Motor loads have a mechanical
dynamic dependence due to the applied load torque but since this load demand depends on the
frequency this will have little influence for decreasing voltage as long as the motor can develop
the necessary torque. Motors are sensitive to voltage changes and electrodynamic couplings will
arise within the winding when voltage changes but the time constants are quite small (one second
or less) and they are in the same time- frame as the voltage regulation of generators. This often
implies a nearly constant active power load when the mechanical slip has been adjusted to a new
operating point after a contingency whereas the reactive power demand may change.
Motor load dynamics is therefore mainly connected with transient voltage stability. There are
also loads with slower dynamics where the dynamic behaviour comes from control systems
regulating the dissipated power electrical heating appliances controlled by electromechanical
thermostats is one example.
The dynamic model proposed by Karlsson [86] is a special case of a dynamic load model given
by Hill [87]. The model implemented is described by the following equations. ts
r vvP
vvPP
dtdPT rP
00
00 (3.47)
t
vvPPP rm
00 (3.48)
Where
V = supplying voltage [kV]

81
Vo = pre-fault value of supplying voltage [kV]
Po = active power consumption at prefault voltage [MW],
Pm = active power consumption model [MW]
Pr = active power recovery [MW]
αs = steady state active load-voltage dependence,
αt = transient active load – voltage dependence, and
Tpr = active load recovery time constant [s] ts
r vvQ
vvQQ
dtdQT rq
00
00 (3.49)
t
vvQQQ rm
00 (3.50)
Qo = reactive power consumption at prefault voltage [Mvar],
Qm = reactive power consumption model [Mvar]
Qr = reactive power recovery [Mvar]
βs = steady state reactive load-voltage dependence,
βt = transient reactive load – voltage dependence, and
Tqr = reactive load recovery time constant [s]
3.9 Static Modelling of Voltage Stability of Large System
The tendency to improve power system performance by efficient utilization of the existing
equipment has led to increased loading and exploitation of the power transmission system. As a
result, incidents of voltage collapse have been experienced by some utilities. This made the
voltage stability problems to receive an increasing attention. Static methods [88-94] have been
widely used for the assessment of voltage stability.
A power system under static study can be considered as consisting of the following buses that are
interconnected through transmission lines:
1. Load Buses where P and Q are specified. These are called PQ buses.
2. Generator buses where the voltage magnitude V and the power P are specified. These are
called PV buses. If the upper and/or lower limits on the reactive power Q on a PV bus are
specified and this limit is reached, then such a bus is treated as a PQ bus as if the reactive power
is specified at that limit.

82
3. A Slack Bus which is essentially an “infinite” bus, where the voltage magnitude V is specified
(normally 1pu) and its phase angle is assumed zero as a reference angle. At this bus, P can be
what it needs to be, based on the line losses, and hence it is called the slack bus which takes up
the slack. Similarly, Q at this bus can be what it needs to be to hold the voltage at the specified
value.
4.There are buses where there is no P and Q injection specified, and the voltage is also not
specified. Often, these become necessary for including transformers. These can be considered as
a subset of PQ buses with specified injection of P=0 and Q=0.
Static methods are able to give indications about both the degree of stability and the sensitivity to
parameter variations. However, static methods can not account for the effects of load dynamics,
control, and protection equipment on voltage stability.
Static modelling of large power system for voltage stability assessment involves the arrangement
of power system elements: generators, transformers, transmission lines, feeders, load etc. The
static voltage stability analysis is based on the model analysis of the power flow Jacobian matrix,
as given in equation (3.51) [13]:
VQVQ
PVP
PQ
PV
JJJJ
QP
. (3.51)
Where
ΔPPV incremental change in bus real power
ΔQPQ incremental change in bus reactive power
Δθ incremental change in bus voltage angle
ΔV incremental change in bus voltage magnitude
The elements of the Jacobian matrix represent the sensitivities between nodal power and bus
voltage changes [95].Power system voltage stability is largely affected by the reactive power.
Keeping real power as constant at each operating point, the Q-V analysis can be carried out.
Assuming that ΔPPV = 0, it follows from equation (3.51) [13, 96]:
VRVPVPQQVPQ JJJJJQ .... 1 (3.52)
And
PQRV QJ .1 (3.53)

83
Based on the JR-1, which is the reduced V-Q Jacobian matrix, the Q-V modal analysis can be
performed. Therefore, the bus, branch and generator participation factors are obtained.
Moreover, the stability margin and the shortest distance to instability will be determined [96, 6].
As discussed in [97, 6], the application of singular value analysis to JR-1 also allows the static
voltage stability analysis.
Since static voltage stability can be analysed using ordinary load flow programs, the model
representation must be that used in the solution.
3.10 Dynamic Modelling Of Voltage Stability
The dynamic voltage stability model includes the following components: the nonlinear machine
model with a 2-axis representation of the generator [98], the IEEE type 1 excitation system [98],
the power system stabilizer of two cascaded lead stages, and the continuous model for the tap-
changing transformer.
In general, the direct axis internal transient voltage dE is very small compared to the quadrature
axis internal transient voltage ,qE and the armature resistance Ra is very small compared to the
direct and quadrature axis synchronous reactances Xd and Xq. Thus, the effects of these can be
neglected for the simplicity of analysis and the complicated stator algebraic equations are
simplified [99]. In addition to [99], the dynamic voltage stability models of power system
stabilizer (PSS) and under load tap changer (ULTC) are obtained as follows:
PSS model
.1dt
dwXTdt
dX ipssi
ri
pssi (3.54)
,2
1
2
12
2
2
dtdX
TKTX
iTKciU
TdtdU pssi
i
ciipssiiE
i
iE (3.55)
midt
dUTT
UT
UTdt
dU iE
i
iiE
iEi
i
Ei ,...1,11 2
2
12
22
(3.56)
Where UE is the stabilising signal as an output of the PSS, and Xpss and UE2 are the state
variables of the PSS system, T is the time constant K is the gain.
ULTC model

84
),( irefii
ti VVdtda
T i = 1, …, n (3.57)
Where the model is a continuous approximation of the discrete under-load tap changer [100], a is
the turns ratio, V and Vref are the secondary voltage measurement and the reference voltage,
respectively, and Ti is the time constant of the ULTC.
The mathematical model for dynamic stability in equations can be shown to be of the differential
algebraic type of ),( yxfx and ,,0 yxg where x represents the state variables and y
represents network variables, such as the voltages and angles at each of the network buses[99].
In the case of small disturbance around an equilibrium point xo, the differential algebraic
equations are linearized to give
yBxAx (3.58)
yDxC 0 (3.59)
Where A, B, C and D are matrices of appropriate dimension defined by
.,,,oooo xxxx y
gandDxgC
yfB
xfA
If D is singular, the Jacobian
IF
VF
IFVF
JQQ
PP
is singular and thus a static bifurcation exists
to cause voltage collapse. Thus, we assume now D is non-singular, then the incremental
algebraic variables can be eliminated and the final dynamic system is
,1 xAxCBDAx (3.60)
,1 xCxCDy (3.61)
Where .,)(.,)( ytyyxtxx and x, and y, are the steady state values of x(t) and y(t),
respectively.
Here, the control variables are model parameters in the system matrix A , hence the control
problem becomes non-conventional and the usual linear optimal control theory cannot be
applied. Since the objective of dynamic voltage stability can be achieved by minimizing
oscillations of the state and network variables, we define a new performance measure which will
limit the magnitude or envelope of oscillations.

85
CHAPTER FOUR
METHOD OF ANALYSIS OF VOLTAGE STABILITY
4.1 Introduction
It is important to have an analytical method to investigate voltage stability in the power system,
particularly with a complex and large interconnected network. The modal analysis or eigenvalue
analysis can be used effectively as a powerful analytical tool to verify both proximity and
mechanism of voltage instability. It involves the calculation of a small number of eigenvalues
and related eigenvectors of a reduced Jacobian matrix. In the past, the electric utility industry
has largely depended on conventional power-flow programs for static analysis of voltage
stability. Stability is determined by computing the V-P and V-Q curves at selected load buses.
Generally, such curves are generated by executing a large number of power flows using
conventional models. While such procedure can be automated, they are time –consuming and do
not readily provide information useful in gaining insight into causes of stability problems. In
addition, these procedures focuses on individual buses, that is, the stability characteristics are
established by stressing each bus independently. This may unrealistically distort the stability
condition of the system. Also, the buses selected for V-Q and V-P analysis must be chosen
carefully, and a large number of such curves may be required to obtain complete information. In
fact, it may not be possible to generate the V-Q curves completely due to power-flow divergence
caused by problems elsewhere in the system.
A number of special techniques have been proposed in the literature for voltage stability analysis
using the static approach. Some of these techniques were described in section 2.8 of this thesis.
In general, these have not found widespread practical application.
A practical application of approaches based on V-Q sensitivity and modal analysis are used. The
advantages of the two approaches are: They give voltage stability related information from a
system wide perspective and clearly identify areas that have potential problems. The modal
analysis approach has the added advantage that it provides information regarding the mechanism
of instability.
This is the principal reason for considering the modal and V-Q sensitivity analysis.

86
However, by using the reduced Jacobian matrix the focus is on the voltage and the reactive
power characteristics. The weak nodes (weak buses) of the system can be identified from the
system reactive power variation sensitivity to incremental change in bus voltage magnitude. The
stability margin or distance to voltage collapse can be estimated by generating the V-Q curves
for that particular bus.
Load characteristics have been found to have significant effect on power system stability. A
simplified voltage dependent real and reactive power load model is used to figure out that effect.
Induction machine is one of the important power system loads. It influences the system voltage
stability especially when large amount of such load is installed in the system.
4.2 Power Flow Problem
The power flow or load flow is widely used in power system analysis. It plays a major role in
planning the future expansion of the power system as well as helping to run existing systems to
run in the best possible way. The network load flow solution techniques are used for steady state
and dynamic analysis programme [3] and [4].
The solution of power flow predicts what the electrical state of the network will be when it is
subject to a specified loading condition. The result of the power flow is the voltage magnitude
and the angle of each of the system nodes. These bus voltage magnitudes and angles are defined
as the system state variables.
That is because they allow all other system quantities to be computed such as real and reactive
power flows, current flows, voltage drops, power losses, etc … power flow solution is closely
associated with voltage stability analysis. It is an essential tool for voltage stability evaluation.
Much of the research on voltage stability deals with the power-flow computation method.
The power flow problem solves the complex matrix equation:
I = YV = *
*
VS (4.1)
where
I = nodal current injection matrix
Y = system nodal admittance matrix
V = unknown complex node voltage vector

87
S = apparent power nodal injection vector presenting specified load and generation of nodes
Where
S = P + jQ (4.2)
The Newton-Raphson method is the most general and reliable algorithm to solve the power-flow
problem. It involves interactions based on successive linearization using the first term of Taylor
expansion of the equation to be solved. From equation (4.1), we can write the equation for node
k (bus k) as:
Ik =
n
mmkmVY
1
(4.3)
kk jQP = *
1
**m
n
mkmkkk VYVIV
(4.4)
Where:
m = 1, 2, …, n
n = number of buses
Vk is the voltage of the kth bus
Ykm is the element of the admittance bus
Equating the real and imaginary parts
n
mkkmkek VYVRP
1
** (4.5)
n
mkkmkmk VYVIQ
1
** (4.6)
Where
Pk is the real power
Qk is the reactive power
With the following notation:
kmmk jkmkm
jmm
jkk eYYeVVeVV ,, (4.7)

88
Where
kV is the magnitude of the voltage
k is the angle of the voltage
km is the load angle
Substituting for Vk, Vm, and Ykm in Equation (4.4)
n
m
jkm
jk
jkkk
kmkk eYeVeVjQP1
Or
n
m
jkmkkKK
kmmkeYVVjQP1
Or
n
mkmkkkmkkkk YVVjQP
1
Or
)sin(cos1
kmmkkmmk
n
mkmkkKk jYVVjQP
Separating the real and imaginary parts of above equation to get real and reactive powers,
kmmk
n
mkmkkk YVVP
1cos ( 4.8 )
kmmk
n
mkmkkk YVVQ
1sin ( 4.9 )
Equation ( 4.4 ) can also be written as
n
m
jmkmkm
jkkk
mk eVjBGeVQP1
where
kmkmkm jBGY
kmkmkm jBGY *
n
m
jmkmkmkkk
mkeVjBGVQP1
or

89
n
mmkmkmkmkkk VjBGVQP
1
n
mmkmkkmkmmkkk jjBGVVQP
1sincos
n
mmkkmmkkmmkKK BGVVQP
1
sincos
mkkmmkkm BGj cossin
Separating the real and imaginary parts of the above equation to get real and reactive
powers,
n
mmkkmmkkmmkK BGVVP
1sincos (4.10)
n
mmkk VVQ
1
mkkmmkkm BG cossin (4.11)
This mismatch power at bus k is given by:
kschkk ppP (4.12)
kschkk QQQ (4.13)
The Pk and Qk are calculated from Equation (4.10) and (4.11)
The Newton – Raphson method solves the partitioned matrix equation:
VJ
QP
(4.14)
Where,
ΔP and ΔQ = mismatch active and reactive power vectors.
ΔV and ΔӨ = unknown voltage magnitude and angle correction vectors. J = Jacobian matrix of partial derivative terms calculated from Equations (4.10) and (4.11)
4.3 Modal Analysis
The modal analysis mainly depends on the power-flow Jacobian matrix of equation (4.14). Gao,
Morison and Kundur [7] proposed this method in 1992. It can predict voltage collapse in
complex power system networks. It involves mainly the computing of the smallest eigenvalues
and associated eigenvectors of the reduced Jacobian matrix obtained

90
from the load flow solution. The eigenvalues are associated with a mode of voltage and reactive
power variation which can provide a relative measure of proximity to voltage instability. Then,
the participation factor can be used effectively to find out the weakest nodes or buses in the
system. The analysis is expressed as follows:
Equation (4.14) can be rewritten as:
VJJJJ
QP
2221
1211 (4.15)
By letting 0P in Equation (4.15)
,0 1211 VJJP VJJ 12
111 (4.16)
and
VJJQ 2221 (4.17)
Substituting Equation (4.16) in Equation (4.17):
VJQ R (4.18)
Where
121
112122 JJJJJ R
RJ is the reduced Jacobian matrix of the system.
Equation (4.18) can be written as
QJV R 1 (4.19)
The matrix RJ represents the linearized relationship between the incremental changes in bus
voltage (ΔV) and bus reactive power injection (ΔQ). It’s well known that, the system voltage is
affected by both real and reactive power variations. In order to focus the study of the reactive
demand and supply problem of the system as well as minimize computational effort by reducing
dimensions of the Jacobian matrix J the real power (ΔP = o) and angle part from the system in
Equation (4.15) are eliminated.
The eigenvalues and eigenvectors of the reduced order Jacobian matrix JR are used for the
voltage stability characteristics analysis. Voltage instability can be detected by identifying modes
of the eigenvalues matrix JR. The magnitude of the eigenvalues provides a relative measure of
proximity to instability. The eigenvectors on the other hand present information related to the
mechanism of loss of voltage stability.
Eigenvalue analysis of JR results in the following.

91
RJ (4.20)
Where
Ф = right eigenvector matrix of RJ
= left eigenvector matrix of RJ
= diagonal eigenvalue matrix of RJ
Equation (4.20) can be written as:
11 RJ (4.21)
Where I
Substituting Equation (4.21) in Equation (4.19):
QV 1
Or
i i
ii QV
(4.22)
Where i is the ίth eigenvalue, i is the ίth column right eigenvector and i is the ίth row left
eigenvector of matrix RJ . Each eigenvalue i and corresponding right and left eigenvectors i
and i , defined the ίth mode of the system. The ίth modal reactive power variation is defined as:
iimi KQ (4.23)
Where iK is a scale factor to normalize vector iQ so that
j
jiiK 122 (4.24)
with ji the thj element of i
The corresponding thi modal voltage variation is:
mii
mi QV 1
(4.25)
Equation (4.25) can be summarized as follows:
1. If λί = O, the ίth modal voltage will collapse because any change in the modal reactive power
will cause infinite modal voltage variation

92
2. If λί > O, the ίth modal voltage and ίth reactive power variation are along the same direction,
indicating that the system is voltage stable.
3. If λί < O the ίth modal voltage and the ίth reactive power variation are along the opposite
direction, indicating that the system is voltage unstable.
In general it can be said that, a system is voltage stable if the eigenvalues of JR are all positive.
This is different from dynamic systems where eigenvalues with negative real parts are stable.
The relationship between system voltage stability and eigenvalues of the JR matrix is best
understood by relating the eigenvalues with the V-Q. sensitivities of each bus (which must be
positive for stability). JR can be taken as a symmetric matrix and therefore the eigenvalues of JR
are close to being purely real. If all the eigenvalues are positive, JR is positive definite and the V-
Q sensitivities are also positive, indicating that the system is voltage stable.
The system is considered voltage unstable if at least one of the eigenvalues is negative. A zero
eigenvalue of JR means that the system is on the verge of voltage instability. Furthermore, small
eigenvalue of JR determine the proximity of the system to being voltage unstable [101].
There is no need to evaluate all the eigenvalues of JR of a large power system because it is
known that once the minimum eigenvalues becomes zeros the system Jacobian matrix becomes
singular and voltage instability occurs. So the eigenvalues of importance are the critical
eigenvalues of the reduced Jacobian matrix JR. Thus, the smallest eigenvalues of JR are taken to
be the least stable modes of the system. The rest of the eigenvalues are neglected because they
are considered to be strong enough modes. Once the minimum eigenvalues and the
corresponding left and right eigenvectors have been calculated the participation factor can be
used to identify the weakest node or bus in the system. An algorithm for the modal method
analysis used in this study is shown in figure 4.1.

93
Figure 4.1 Algorithm for the voltage stability analysis
Obtain the load flow solution for a base case of the system and get the Jacobian matrix (J)
Compute the reduced Jacobian matrix (JR) JR = [J22 – J21J11
-1J12]
Compute the eigenvalue of JR(λ)
If λί = 0 The system will collapse
If λί > 0 The system is voltage stable
If λί < 0 The system is voltage unstable
How close is the system to voltage instability?
Find the minimum eigen value of JR (λmin)
Calculate the right and left eigenvectors of JR(Ф and )
Compute the Participation factor (Pki) for (λmin)i: Pki = Фki ik
The highest Pki will indicate the most participated kth bus to ith mode in the
system
Generate the Q-V curve to the participated kth bus.

94
4.4 Identification of the Weak Load Buses.
The minimum eigenvalues, which become close to instability, need to be observed more closely.
The appropriate definition and determination as to which node or load bus participates in the
selected modes become very important. This necessitates a tool, called the participation factor,
for identifying the weakest nodes or load buses that are making significant contribution to the
selected modes [9].
4.4.1 Bus participation factor:
The relative participation of a bus in a certain mode is given by the bus participation factor. Bus
participation factors determine the areas with each mode. Thus, voltage weak areas or unstable
(not controllable) areas are identified. The sum of all the bus participations for each mode is
equal to unity. The size of bus participation in a given mode indicates the effectiveness of
remedial actions applied at that bus in stabilizing that mode.
If i and i represent the right and left – hand eigenvectors, respectively, for the eigenvalues λί
of the matrix JR, then the participation factor measuring the participation of the Kth bus in ίth
mode is defined as:
ikkikiP (4.26)
Note that for all the small eigenvalues, bus participation factors determine the area close to
voltage instability
Equation (4.26) implies that Pkί shows the participation of the ίth eigenvalue to the V – Q
sensitivity at bus k. The node or bus k with highest Pkί is the most contributing factor in
determining the V – Q sensitivity at ίth mode. Therefore, the bus participation factor determines
the area close to voltage instability provided by the smallest eigenvalue of JR.
4.4.2 Branch participation factors:
The relative participation of branch j in a certain mode is given by the participation factor
lossjj
lossjj QMax
QP
(4.27)
Branch participation factors indicate for each mode, which branches consume the most reactive
power in response to an incremental change in reactive load. Branches with high

95
participations are either weak links or, are heavily loaded. Branch participations are useful for
identifying remedial measures to alleviate voltage stability problems and for contingency
selection.
4.4.3 Generator participation factors:
The relative participation of machine in a certain mode is given by the generator participation
factor.
mm
mm QMax
QP
(4.28)
Generator participation factors indicate, for each mode, which generators supply the most
reactive power in response to an incremental change in system reactive loading.
Generator participations provide important information regarding proper distribution of reactive
reserves among all the machines in order to maintain an adequate voltage stability margin.
4.5 V – Q sensitivity Analysis
V – Q sensitivity analysis calculates the relation between voltage change and reactive power
change.
QJV R .1 (4.29)
ΔV incremental change in bus voltage magnitude (vector)
ΔQ incremental change in bus reactive power injection (vector)
JR reduced Jacobian matrix
The elements of the inverse of the reduced Jacobian matrix JR are the V – Q sensitivities. The
diagonal components are the self sensitivities i
i
QV
and the nondiagonal elements are the mutual
sensitivitiesi
k
QV
The sensitivities of voltage controlled buses are equal zero. Positive sensitivities: stable
operation, the smaller the sensitivity the more stable the system. As stability decreases, the
magnitude of the sensitivity increases, becoming infinite at the stability limit (maximum
loadability).

96
Negative sensitivities: unstable operation. The system is not controllable, because all reactive
power control devices are designed to operate satisfactorily when an increase in Q is
accompanied by an increase in V.

97
CHAPTER FIVE
SAMPLE SYSTEMS MODELLING, SIMULATION AND RESULTS
ANALYSIS
5.1 Introduction
The Modal analysis method has been successfully applied to two different power systems. A
power flow program based on Matlab is developed to:
1. Calculate the power flow solution
2. Analyze the voltage stability based on modal analysis
3. Generate the Q-V sensitivities and Participation factors
4. Generate Q-V Curves
5.2 Simulation Modelling Of the IEEE 14 Bus System
The Modal analysis technique is applied to the IEEE 14 Bus System shown in Figure 5.1. The
data required for the simulation are as follows: Line data represented in Table 5.1; while Table
5.2 represents load distribution, all indicated as appendix A and B respectively. The voltage
profile of the buses is presented from the load flow simulation as shown in Figure 5.2. It can be
seen that all the bus voltages are within the acceptable level (± 5%). The lowest voltage
compared to the other buses can be noticed in bus number 3.

98
BRANCH-3P=73.48 MWQ=3.54 MvarLoad=0.0 %
BRANCH-3P=73.48 MWQ=3.54 MvarLoad=0.0 %
BRANCH-2P=75.46 MWQ=5.58 MvarLoad=0.0 %
BRANCH-2P=75.46 MWQ=5.58 MvarLoad=0.0 %
BRANCH-1P=157.14 MWQ=-20.46 Mvar
Load=0.0 %
BRANCH-1P=157.14 MWQ=-20.46 Mvar
Load=0.0 %
BRANCH-7P=59.64 MWQ=-9.08 Mvar
Load=0.0 %
BRANCH-7P=59.64 MWQ=-9.08 Mvar
Load=0.0 % BRANCH-6P=23.06 MWQ=-6.89 Mvar
Load=0.0 %
BRANCH-6P=23.06 MWQ=-6.89 Mvar
Load=0.0 %
BRANCH-5P=41.72 MWQ=3.35 MvarLoad=0.0 %
BRANCH-5P=41.72 MWQ=3.35 MvarLoad=0.0 %
BRANCH-4P=55.93 MWQ=1.79 MvarLoad=0.0 %
BRANCH-4P=55.93 MWQ=1.79 MvarLoad=0.0 %
BRANCH-13P=18.30 MWQ=9.86 MvarLoad=0.0 %
BRANCH-13P=18.30 MWQ=9.86 MvarLoad=0.0 %
BRANCH-12P=8.05 MW
Q=3.15 MvarLoad=0.0 %
BRANCH-12P=8.05 MW
Q=3.15 MvarLoad=0.0 %
BRANCH-11P=8.22 MW
Q=8.66 MvarLoad=0.0 %
BRANCH-11P=8.22 MW
Q=8.66 MvarLoad=0.0 %
BRANCH-19P=1.87 MW
Q=1.38 MvarLoad=0.0 %
BRANCH-19P=1.87 MW
Q=1.38 MvarLoad=0.0 %
BRANCH-18P=4.55 MW
Q=6.50 MvarLoad=0.0 %
BRANCH-18P=4.55 MW
Q=6.50 MvarLoad=0.0 %
BRANCH-17P=8.69 MW
Q=0.46 MvarLoad=0.0 %
BRANCH-17P=8.69 MW
Q=0.46 MvarLoad=0.0 %
BRANCH-16P=4.45 MW
Q=-0.68 MvarLoad=0.0 %
BRANCH-16P=4.45 MW
Q=-0.68 MvarLoad=0.0 %
BRANCH-15P=27.15 MW
Q=15.71 MvarLoad=0.0 %
BRANCH-15P=27.15 MW
Q=15.71 MvarLoad=0.0 %
BRANCH-20P=6.41 MW
Q=4.94 MvarLoad=0.0 %
BRANCH-20P=6.41 MW
Q=4.94 MvarLoad=0.0 %
P=27.15 MWQ=-5.92 Mvar
Load=0.0 %
P=27.15 MWQ=-5.92 Mvar
Load=0.0 %
P=-27.15 MWQ=7.43 MvarLoad=0.0 %
P=-27.15 MWQ=7.43 MvarLoad=0.0 %
BRANCH-8BRANCH-8
P=45.77 MWQ=10.88 Mvar
Load=0.0 %
P=45.77 MWQ=10.88 Mvar
Load=0.0 %
P=-45.77 MWQ=-6.18 Mvar
Load=0.0 %
P=-45.77 MWQ=-6.18 Mvar
Load=0.0 %BRANCH-10BRANCH-10
P=15.49 MWQ=2.93 Mvar
Load=0.0 %
P=15.49 MWQ=2.93 Mvar
Load=0.0 %
P=-15.49 MWQ=-1.66 Mvar
Load=0.0 %
P=-15.49 MWQ=-1.66 Mvar
Load=0.0 %
BRANCH-9BRANCH-9
P=0.00 MWQ=-23.14 Mvar
Load=0.0 %
P=0.00 MWQ=-23.14 Mvar
Load=0.0 %
P=0.00 MWQ=24.00 Mvar
Load=0.0 %
P=0.00 MWQ=24.00 Mvar
Load=0.0 %
BRANCH-14BRANCH-14
GNBUS_1 69.0P=-232.60 MWQ=14.88 Mvar
GNBUS_1 69.0P=-232.60 MWQ=14.88 Mvar
GNBUS_2 69.0P=-40.00 MW
Q=-49.16 Mvar
GNBUS_2 69.0P=-40.00 MW
Q=-49.16 Mvar
GNBUS_6 13.8P=0.00 MW
Q=-22.98 Mvar
GNBUS_6 13.8P=0.00 MW
Q=-22.98 Mvar
GNBUS_3 69.0P=0.00 MW
Q=-27.58 Mvar
GNBUS_3 69.0P=0.00 MW
Q=-27.58 Mvar
GNBUS_8 18.0P=0.00 MW
Q=-24.00 Mvar
GNBUS_8 18.0P=0.00 MW
Q=-24.00 Mvar
LDBUS_2 69.0P=21.70 MW
Q=12.70 Mvar
LDBUS_2 69.0P=21.70 MW
Q=12.70 Mvar
LDBUS_6 13.8P=11.20 MWQ=7.50 Mvar
LDBUS_6 13.8P=11.20 MWQ=7.50 Mvar
LDBUS_5 69.0P=7.60 MW
Q=1.60 Mvar
LDBUS_5 69.0P=7.60 MW
Q=1.60 Mvar
LDBUS_4 69.0P=47.80 MWQ=4.00 Mvar
LDBUS_4 69.0P=47.80 MWQ=4.00 Mvar
LDBUS_3 69.0P=94.20 MW
Q=19.00 Mvar
LDBUS_3 69.0P=94.20 MW
Q=19.00 Mvar
LDBUS_11 13.8P=3.50 MW
Q=1.80 Mvar
LDBUS_11 13.8P=3.50 MW
Q=1.80 Mvar
LDBUS_10 13.8P=9.00 MW
Q=5.80 Mvar
LDBUS_10 13.8P=9.00 MW
Q=5.80 Mvar
LDBUS_9 13.8P=29.50 MW
Q=16.60 Mvar
LDBUS_9 13.8P=29.50 MW
Q=16.60 Mvar
LDBUS_7 13.8P=0.00 MW
Q=0.00 Mvar
LDBUS_7 13.8P=0.00 MW
Q=0.00 Mvar
LDBUS_14 13.8P=14.90 MWQ=5.00 Mvar
LDBUS_14 13.8P=14.90 MWQ=5.00 Mvar
LDBUS_13 13.8P=13.50 MWQ=5.80 Mvar
LDBUS_13 13.8P=13.50 MWQ=5.80 Mvar
LDBUS_12 13.8P=6.10 MW
Q=1.60 Mvar
LDBUS_12 13.8P=6.10 MW
Q=1.60 Mvar
BUS_1 69.0U=73.1 kVu=106.0 %
Uang=0.00 °
BUS_1 69.0U=73.1 kVu=106.0 %
Uang=0.00 °
BUS_8 18.0U=19.6 kVu=108.7 %
BUS_8 18.0U=19.6 kVu=108.7 %
BUS_2 69.0U=72.1 kVu=104.5 %
Uang=-4.99 °
BUS_2 69.0U=72.1 kVu=104.5 %
Uang=-4.99 °
BUS_6 13.8U=14.8 kVu=107.0 %
Uang=-14.43 °
BUS_6 13.8U=14.8 kVu=107.0 %
Uang=-14.43 °
BUS_5 69.0U=70.1 kVu=101.6 %
Uang=-8.75 °
BUS_5 69.0U=70.1 kVu=101.6 %
Uang=-8.75 °
BUS_4 69.0U=69.8 kVu=101.2 %
Uang=-10.22 °
BUS_4 69.0U=69.8 kVu=101.2 %
Uang=-10.22 °
BUS_3 69.0U=69.7 kVu=101.0 %
Uang=-12.76 °
BUS_3 69.0U=69.7 kVu=101.0 %
Uang=-12.76 °
BUS_11 13.8U=14.4 kVu=104.7 %
Uang=-14.84 °
BUS_11 13.8U=14.4 kVu=104.7 %
Uang=-14.84 °
BUS_10 13.8U=14.2 kVu=103.1 %
Uang=-15.02 °
BUS_10 13.8U=14.2 kVu=103.1 %
Uang=-15.02 °
BUS_9 13.8U=14.2 kVu=103.2 %
Uang=-14.81 °
BUS_9 13.8U=14.2 kVu=103.2 %
Uang=-14.81 °
BUS_7 13.8U=14.5 kVu=104.8 %
Uang=-13.23 °
BUS_7 13.8U=14.5 kVu=104.8 %
Uang=-13.23 °
BUS_14 13.8U=14.1 kVu=102.0 %
Uang=-16.06 °
BUS_14 13.8U=14.1 kVu=102.0 %
Uang=-16.06 °
BUS_13 13.8U=14.4 kVu=104.7 %
Uang=-15.31 °
BUS_13 13.8U=14.4 kVu=104.7 %
Uang=-15.31 °
BUS_12 13.8U=14.5 kVu=105.3 %
Uang=-15.28 °
BUS_12 13.8U=14.5 kVu=105.3 %
Uang=-15.28 °
Figure 5.1 The IEEE 14 Bus System Modelled Using Neplan Software Simulated in Matlab 7.5.0
Environment .

99
Since there are 14 buses among which there is one swing bus and 4 PV buses, then the total
number of eigenvalues of the reduced Jacobian matrix RJ is expected to be 9 as shown in Table
5.3
Table 5.3 IEEE 14 Bus System Eigenvalues.
# 1 2 3 4 5 6 7 8 9
Eigenvalue 2.0792 5.3677 7.5987 9.4942 16.0985 18.8474 19.3553 38.5332 64.9284
0 5 10 150
0.2
0.4
0.6
0.8
1
1.2
1.4
Bus number
Vol
tage
[p.u
]
Voltage Profile of all Buses [IEEE 14 Bus system]
Figure 5.2 Voltage Profile of all Buses of the IEEE 14 Bus System
From Table 5.3, it can be noticed that the minimum eigenvalue λ = 2.0792 is the most critical
mode. The Q-V Sensitivity is calculated to determine the most critical bus the simulation showed
that bus 14 is the most critical with sensitivity of 0.222725 as shown in Figure 5.3.

100
Figure 5.3 Q-V Sensitivity of IEEE 14 Bus system
The bus participation factors was calculated, the result shows that bus 14 has the highest bus
participation factor of 0.232557 at the least eigenvalue λ = 2.0792 as shown in
Figure 5.4, indicates the highest contribution of this bus to the voltage collapse.
The branch participation factors was calculated, the result shows that branch 10 has the highest
branch participation factor of 0.968457 at the least eigenvalue λ = 2.0792 as shown in Figure 5.5,
indicates the highest contribution of this branch to the voltage collapse.
The generator participation factors was calculated, the result shows that Gnbus 6 has the highest
generator participation factor of 0.952139 at the least eigenvalue λ = 2.0792 as shown in Figure
5.6, indicates the highest contribution of this generator to the voltage collapse.

101
Figure 5.4 Bus Participation Factors at the Least eigenvalue of λ = 2.0792

102
Figure 5.5 The branch Participation Factors for Least Eigenvalue λ = 2.0792

103
Figure 5.6 Generator Participation Factors at least Eigenvalue of λ = 2.0792
5 .3 Nigerian Power System Modelling, Simulation, Results and
Analysis
The Nigerian 330kV, 30Bus Interconnected Power System (NIPS) is modelled using NEPLAN
software operated in matlab 7.5.0 environment is shown in Figure 5.7 the model is achieved
using elements arrangement. The data required for the simulation are as follows: Line data
represented in Table 5.4; while Table 5.5 represents load distribution, all indicated as appendix C
and D respectively.

104
SM-160P=-230.000 MWQ=-93.402 Mvar
SM-160P=-230.000 MWQ=-93.402 Mvar
SM-176P=-90.000 MW
Q=-228.569 Mvar
SM-176P=-90.000 MW
Q=-228.569 Mvar
L-182P=56.400 MWQ=42.300 Mvar
L-182P=56.400 MWQ=42.300 Mvar
L-201P=133.000 MWQ=97.500 Mvar
L-201P=133.000 MWQ=97.500 Mvar
L-207P=332.000 MWQ=249.000 Mvar
L-207P=332.000 MWQ=249.000 Mvar
SM-245P=-220.000 MWQ=-670.366 Mvar
SM-245P=-220.000 MWQ=-670.366 Mvar SM-252
P=-70.000 MWQ=-3.468 Mvar
SM-252P=-70.000 MWQ=-3.468 Mvar
L-286P=95.000 MWQ=71.250 Mvar
L-286P=95.000 MWQ=71.250 Mvar
L-292P=228.000 MWQ=171.000 Mvar
L-292P=228.000 MWQ=171.000 Mvar
L-298P=20.000 MWQ=15.000 Mvar
L-298P=20.000 MWQ=15.000 Mvar
L-304P=90.000 MWQ=67.500 Mvar
L-304P=90.000 MWQ=67.500 Mvar
L-310P=0.265 MWQ=0.198 Mvar
L-310P=0.265 MWQ=0.198 Mvar
L-316P=86.000 MWQ=64.500 Mvar
L-316P=86.000 MWQ=64.500 Mvar
L-322P=124.200 MWQ=93.300 Mvar
L-322P=124.200 MWQ=93.300 Mvar
L-334P=109.600 MWQ=82.200 Mvar
L-334P=109.600 MWQ=82.200 Mvar
L-340P=390.000 MWQ=0.000 Mvar
L-340P=390.000 MWQ=0.000 Mvar
SM-347P=-150.000 MWQ=-285.773 Mvar
SM-347P=-150.000 MWQ=-285.773 Mvar
L-364P=65.000 MWQ=48.750 Mvar
L-364P=65.000 MWQ=48.750 Mvar
L-370P=0.133 MWQ=0.100 Mvar
L-370P=0.133 MWQ=0.100 Mvar
L373P=71.404 MWQ=52.318 Mvar
L373P=71.404 MWQ=52.318 Mvar
L389P=157.603 MWQ=39.464 Mvar
L389P=157.603 MWQ=39.464 Mvar
L405P=74.484 MW
Q=-276.269 Mvar
L405P=74.484 MW
Q=-276.269 Mvar
L413P=0.025 MW
Q=-0.046 Mvar
L413P=0.025 MW
Q=-0.046 Mvar
L421P=308.521 MWQ=-56.532 Mvar
L421P=308.521 MWQ=-56.532 Mvar
L429P=283.480 MWQ=-24.573 Mvar
L429P=283.480 MWQ=-24.573 Mvar
L437P=150.000 MWQ=285.773 Mvar
L437P=150.000 MWQ=285.773 Mvar
L445P=307.643 MWQ=122.471 Mvar
L445P=307.643 MWQ=122.471 Mvar
L453P=142.114 MWQ=134.388 Mvar
L453P=142.114 MWQ=134.388 Mvar
L461P=131.675 MWQ=12.731 Mvar
L461P=131.675 MWQ=12.731 Mvar
L469P=214.033 MWQ=-109.740 Mvar
L469P=214.033 MWQ=-109.740 Mvar
L477P=0.158 MWQ=0.021 Mvar
L477P=0.158 MWQ=0.021 Mvar
L485P=90.000 MW
Q=228.569 Mvar
L485P=90.000 MW
Q=228.569 Mvar
L493P=79.063 MW
Q=-112.274 Mvar
L493P=79.063 MW
Q=-112.274 Mvar
L501P=140.321 MWQ=-55.315 Mvar
L501P=140.321 MWQ=-55.315 Mvar
L509P=212.891 MWQ=-8.475 Mvar
L509P=212.891 MWQ=-8.475 Mvar
L517P=877.566 MWQ=-105.542 Mvar
L517P=877.566 MWQ=-105.542 Mvar
L541P=65.000 MWQ=48.750 Mvar
L541P=65.000 MWQ=48.750 Mvar
L549P=307.853 MWQ=18.296 Mvar
L549P=307.853 MWQ=18.296 Mvar
L557P=1512.972 MWQ=248.074 Mvar
L557P=1512.972 MWQ=248.074 Mvar
L573P=422.765 MWQ=35.337 Mvar
L573P=422.765 MWQ=35.337 Mvar
L589P=71.241 MW
Q=-52.321 Mvar
L589P=71.241 MW
Q=-52.321 Mvar
L597P=71.583 MW
Q=190.283 Mvar
L597P=71.583 MW
Q=190.283 Mvar
L605P=64.760 MW
Q=-186.656 Mvar
L605P=64.760 MW
Q=-186.656 MvarL613
P=64.760 MWQ=-186.656 Mvar
L613P=64.760 MW
Q=-186.656 Mvar
L621P=95.045 MWQ=71.580 Mvar
L621P=95.045 MWQ=71.580 Mvar
L629P=171.687 MWQ=143.450 Mvar
L629P=171.687 MWQ=143.450 Mvar
L637P=28.969 MWQ=21.727 Mvar
L637P=28.969 MWQ=21.727 Mvar
L645P=28.969 MWQ=21.727 Mvar
L645P=28.969 MWQ=21.727 Mvar
L-213P=80.000 MWQ=60.000 Mvar
L-213P=80.000 MWQ=60.000 Mvar
L661P=18.220 MWQ=-7.646 Mvar
L661P=18.220 MWQ=-7.646 Mvar
L669P=31.728 MWQ=-4.260 Mvar
L669P=31.728 MWQ=-4.260 Mvar
L677P=38.245 MWQ=7.533 Mvar
L677P=38.245 MWQ=7.533 Mvar
L685P=220.000 MWQ=670.366 Mvar
L685P=220.000 MWQ=670.366 Mvar
N140-Egbin G.S.-B4330 kV
u=100.00 %
N140-Egbin G.S.-B4330 kV
u=100.00 %
N28-Ibadan-B13330 kV
u=94.96 %
N28-Ibadan-B13330 kV
u=94.96 %
B-49-Jebba G.S.-B2330 kV
u=100.00 %
B-49-Jebba G.S.-B2330 kV
u=100.00 %
B-33-Ikeja West-B14330 kV
u=96.01 %
B-33-Ikeja West-B14330 kV
u=96.01 %
N136-Egbin T.S.-B10330 kV
u=96.91 %
N136-Egbin T.S.-B10330 kV
u=96.91 %B-41-Akangba-B15
330 kVu=93.07 %
B-41-Akangba-B15330 kV
u=93.07 %
N81-Delta-B7330 kV
u=100.00 %
N81-Delta-B7330 kV
u=100.00 %
N57-Aladja-B25330 kV
u=99.90 %
N57-Aladja-B25330 kV
u=99.90 %
N65-Aba-B24330 kV
u=98.50 %
N65-Aba-B24330 kV
u=98.50 %
L732P=260.498 MWQ=-14.644 Mvar
L732P=260.498 MWQ=-14.644 Mvar
B-69-Onisha-B23330 kV
u=96.65 %
B-69-Onisha-B23330 kV
u=96.65 %
B-77-Enugu-B26330 kV
u=96.31 %
B-77-Enugu-B26330 kV
u=96.31 %
B-93-Shiroro G.S.-B3330 kV
u=100.00 %
B-93-Shiroro G.S.-B3330 kV
u=100.00 %
N152-Kaduna-B17330 kV
u=98.35 %
N152-Kaduna-B17330 kV
u=98.35 %
N45-Jos-B19330 kV
u=94.17 %
N45-Jos-B19330 kV
u=94.17 %
L-764P=130.000 MWQ=0.000 Mvar
L-764P=130.000 MWQ=0.000 Mvar
N148-Kano-B18330 kV
u=96.65 %
N148-Kano-B18330 kV
u=96.65 %
L-773P=7.900 MWQ=5.930 Mvar
L-773P=7.900 MWQ=5.930 Mvar
L-779P=144.900 MWQ=108.680 Mvar
L-779P=144.900 MWQ=108.680 Mvar
N20-Jebba T.S.-B8330 kV
u=99.65 %
N20-Jebba T.S.-B8330 kV
u=99.65 %
N24-Oshogbo-B12330 kV
u=98.27 %
N24-Oshogbo-B12330 kV
u=98.27 %
B-37-Aja-B16330 kV
u=96.72 %
B-37-Aja-B16330 kV
u=96.72 %
SM-823P=-72.000 MW
Q=-193.423 Mvar
SM-823P=-72.000 MW
Q=-193.423 Mvar
N73-Afam-B5330 kV
u=100.00 %
N73-Afam-B5330 kV
u=100.00 %
L829P=40.000 MWQ=15.000 Mvar
L829P=40.000 MWQ=15.000 Mvar
B-85-Benin-B21330 kV
u=98.15 %
B-85-Benin-B21330 kV
u=98.15 %
SM-137202P=-1475.104 MWQ=-350.122 Mvar
SM-137202P=-1475.104 MWQ=-350.122 Mvar
N61-Sapele-B1330 kV
u=100.00 %
N61-Sapele-B1330 kV
u=100.00 %
L-175351P=65.000 MWQ=48.750 Mvar
L-175351P=65.000 MWQ=48.750 Mvar
B-89-Ajaokuta-22330 kV
u=97.29 %
B-89-Ajaokuta-22330 kV
u=97.29 %
N16-Kainji-B6330 kV
u=100.00 %
N16-Kainji-B6330 kV
u=100.00 %
L175409P=15.004 MWQ=10.018 Mvar
L175409P=15.004 MWQ=10.018 Mvar
L-175420P=15.000 MWQ=10.000 Mvar
L-175420P=15.000 MWQ=10.000 Mvar
N175397-Sokoto-B27330 kV
u=97.92 %
N175397-Sokoto-B27330 kV
u=97.92 %
N144-Shiroro T.S. -B9330 kV
u=99.55 %
N144-Shiroro T.S. -B9330 kV
u=99.55 %
N12-Birnin-Kebbi-B11330 kV
u=98.04 %
N12-Birnin-Kebbi-B11330 kV
u=98.04 %
L-175457P=40.000 MWQ=15.000 Mvar
L-175457P=40.000 MWQ=15.000 Mvar
N175427-Abuja-B30330 kV
u=99.48 %
N175427-Abuja-B30330 kV
u=99.48 %
B-53-Gombe-B20330 kV
u=94.16 %
B-53-Gombe-B20330 kV
u=94.16 %
L-175482P=20.000 MWQ=10.000 Mvar
L-175482P=20.000 MWQ=10.000 Mvar
L-175506P=0.025 MWQ=0.005 Mvar
L-175506P=0.025 MWQ=0.005 Mvar
N175463-Maiduguri-B28330 kV
u=94.17 %
N175463-Maiduguri-B28330 kV
u=94.17 %
Figure 5.7 Nigerian 330kV, 30Bus Interconnected Power System Network Modelled Using
NEPLAN Software Simulated in Matlab 7.5.0 Environment.

105
The modelled network was simulated to obtain the load flow results. Table 5.6 shows the nodes results, while Table 5.7 is the elements results, they were indicated as appendix E and F respectively. Voltage profile of the Power Holding Company of Nigeria (PHCN) 330kV, 30bus interconnected network system is shown in figure 5.8
0 5 10 15 20 25 30 350
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Bus number
Vol
tage
[p.u
]
Voltage Profile of all Buses[PHCN 30-Bus System]
Figure 5.8 Voltage Profile of (PHCN) 30 -Bus System
The voltage profile of all buses of the PHCN 30 Bus system as obtained from the load flow
result. It can be seen that all the bus voltages are within the acceptable level %5 except buses
in Table 5.8
Table 5.8 Buses with voltages below acceptable (±5% ) level
Bus Number Bus Name Voltage (p.u)
19 Jos 0 .9359
20 Gombe 0.9175
28 Maiduguri 0.9106

106
The lowest voltages compared to other buses can be noticed in buses 19, 20, 28 which are Jos,
Gombe and Maidugri respectively. The plot of the P-V curves for the three buses is shown in
figure 5.9 The bus that will on loading experience voltage instability or collapse can not be
predicted from the P-V curve as the three curves are interwoven.
Figure 5.9 The P-V Curves for Jos, Maiduguri and Gombe
The plots for the Q-V curves for Maiduguri, Gombe and Jos are shown in figure 5.10 the voltage
collapse bus can easily be predicted.

107
Figure 5.10 The Q-V curves for Maiduguri, Gombe and Jos
To have clear indication of voltage collapse on the system loading, the calculation of voltage
stability was carried out using the system software for the determination of the following: the
Eigenvalues, the V-Q sensitivities, the Bus participation factors at various eigenvalues, the
Branch participation factors at various eienvalues, the generator participation factors at various
eigenvalues. For a 30bus network with 7generator buses the expected eigenvalues will be 23
since voltage stability is load dependent we expect the eigenvalues at the 23 load buses. Table
5.9 is the calculated eigenvalues while Figure 5.11 is the plot of the eigenvalues. From Table 5.9
all the eigenvalues are positive this is an indication that the system is stable.

108
For the determination of the buses in the system that will collapse with system loading, the least
eigenvalue of 3.4951 will be used. .
Table 5.9 PHCN 30 Bus system eigenvalues
# Eigenvalue
1 3.4951
2 12.0129
3 21.1896
4 23.1243
5 34.6424
6 49.2926
7 51.1237
8 58.8551
9 107.3404
10 120.5424
11 128.6551
12 131.8992
13 183.4425
14 194.8132
15 198.2067
16 214.9579
17 223.3135
18 289.0459
19 420.3368
20 495.4999
21 1104.0739
22 1215.5813
23 1449.9396

109
Figure 5.11 The eigenvalues of the 23 buses
The calculated V-Q sensitivities are represented in Table 5.10, while Figure 5.12 is
V-Q sensitivities graph representation. The bus with highest sensitivity of 0.1474 is Maiduguri
followed by Gombe, Kano and Jos with 0.1312, 0.0823 and 0.0370 respectively. It is now clear
that the first bus that will collapse on the same percentage of loading will be Maiduguri followed
by Gombe then Kano before Jos against the load flow result of Table 5.8.

110
Table 5.10 The V-Q Sensitivities for the Network System ID NAME SENSITIVITY % /Mvar 1 175463 N175463-Maiduguri-B28 0.1474 2 53 B-53-Gombe-B20 0.1312
3 148 N148-Kano-B18 0.0823
4 45 N45-Jos-B19 0.0370
5 175397 N175397-Sokoto-B27 0.0310
6 175475 N175475-Makurdi-B29 0.0242
7 41 B-41-Akangba-B15 0.0231
8 28 N28-Ibadan-B13 0.0214
9 12 N12-Birnin-Kebbi-B11 0.0207
10 89 B-89-Ajaokuta-22 0.0181
11 77 B-77-Enugu-B26 0.0134 12 69
B-69-Onitsha-B23 0.0125
13 152
N152-Kaduna-B17 0.0082
14 65 N65-Aba-B24 0.0062 15 37
B-37-Aja-B16 0.0061
16 24
N24-Oshogbo-B12 0.0056
17 57
N57-Aladja-B25 0.0055
18 175427 N175427-Abuja-B30 0.0051 19 33
B-33-Ikeja West-B14 0.0051
20 136
N136-Egbin T.S.-B10 0.0038
21 85 B-85-Benin-B21 0.0031 22 144 N144-Shiroro T.S. -B9 0.0014 23 20
N20-Jebba T.S.-B8 0.0011

111
Figure 5.12 The V-Q Sensitivities of all Buses
The calculated bus participation factors at various eigenvalues are shown in Table 5.11 indicated
as appendix G .At the least eigenvalue of 3.4951 the buses that will contribute to voltage collapse
are Maiduguri and Gombe as shown in figure 5.13 with Maiduguri showing the highest
contribution. To improve the voltage problem in the zone, a generating station or static var
compensation can be built within the zone.

112
Figure 5.13 Bus Participation Factor at the Least Eigenvalue of 3.4951
The calculated branch participation factors at various eigenvalues are shown in Table 5.12 indicated as appendix H, while figure 5.14 is the branch participation factors for the least eigenvalue of 3.4951. The branch with highest contribution is L469- Jos –Kaduna B19-B17 followed by L517-Ikeja West –Benin B14 – B21; L453 Aba-Enugu B24-B26; L421 Jebba T.S –Shiroro T.S B8-B9; L445 Shiroro T.S – Kaduna B9-B17; L597 Afam- Aba B5-B24.

113
Figure 5.14 The Branch Participation Factor at the Least Eigenvalue of 3.4951
The calculated generator participation factors are shown in Table 5.13 indicated as appendix I,
while Figure 5.15 is the representation of the generator participation factor at
the least eigenvalue of 3.4951.The generator that will have highest contribution is
SM347 Shiroro, followed by SM-823 and SM-137202 Sapele.

114
Figure 5.15 Generator Participation Factor at Least Eigenvalue of 3.4951
5.3.1 The Compensated Nigerian Interconnected Power System
(CNIPS) Network Modelling, Simulation, Results and Analysis.
The system was modelled with the compensator of Table 5.14. The simulation results gave
voltage profile of Figure 5.16, the bus voltages are all within the acceptable range of (±
5%).The bus voltages are represented in Table 5.15 appendix J.

115
Table 5.14 Status of Reactors Used in the Modelling and Simulation of
Nigerian 330kV, 30Bus Interconnected System
. Station Rating
kV Mvar
Kaduna 330 75
Jebba 330 75
Kano 330 75
Gombe 330 100
Oshogbo 330 75
Benin 330 75
Ikeja- West 330 75
Aba 330 30
Onitsha 330 30
Enugu 330 30
Markurdi 330 30
Ibadan 330 75
Sokoto 330 75
Akangba 330 75
Jos 330 30
Birnin Kebbi 330 30
Ajaokuta 330 30

116
0 5 10 15 20 25 30 350
20
40
60
80
100
120 Voltage Profile of Compensated 330kV, 30Bus System
bus number
bus
volta
ge
Figure 5.16 Voltage Profile of the Compensated 330kV, 30Bus System.
Table 5.16 is the calculated eigenvalues for the compensated system, while Figure 5.17 is the
plot of the eigenvalues. From Table 5.16 all the eigenvalues are positive this is an indication that
the system is stable.
For the determination of the buses in the system that will collapse with system loading, the least
eigenvalue of 3.6755 will be used. .

117
Table 5.16 NIPS 330kV, 30 Buses Compensated System Eigenvalues
# Eigenvalue
1 3.6755
2 12.2427
3 21.3533
4 24.0815
5 35.3754
6 50.8600
7 52.4994
8 61.0761
9 111.4166
10 124.0722
11 132.2262
12 139.1700
13 183.4425
14 199.9023
15 200.7238
16 217.0518
17 227.4106
18 296.5655
19 429.6507
20 508.4341
21 1108.8401
22 1221.6477
23 1491.4947

118
Figure 5.17 The Eigenvalues of the 23 buses of the Compensated NIPS
The calculated V-Q sensitivities are represented in Table 5.17, while Figure 5.18 is the V-Q
sensitivities graph representation. The bus with highest sensitivity of 0.1398 is Maiduguri
followed by Gombe, Kano and Jos with 0.1247, 0.0807 and 0.0351 respectively. It is now clear
that the first bus that will collapse on the same percentage of loading will be Maiduguri followed
by Gombe then Kano and Jos.

119
Table 5.17 The V-Q Sensitivities for the Compensated NIPS Network System ID NAME SENSITIVITY % /Mvar 1 175463 N175463-Maiduguri-B28 0.1398 2 53 B-53-Gombe-B20 0.1247
3 148 N148-Kano-B18 0.0807
4 45 N45-Jos-B19 0.0351
5 175397 N175397-Sokoto-B27 0.0307
6 175475 N175475-Makurdi-B29 0.0233
7 41 B-41-Akangba-B15 0.0224
8 28 N28-Ibadan-B13 0.0208
9 12 N12-Birnin-Kebbi-B11 0.0205
10 89 B-89-Ajaokuta-22 0.0178
11 77 B-77-Enugu-B26 0.0131 12 69
B-69-Onisha-B23 0.0122
13 152
N152-Kaduna-B17 0.0081
14 65 N65-Aba-B24 0.0062 15 37
B-37-Aja-B16 0.0060
16 24
N24-Oshogbo-B12 0.0055
17 57
N57-Aladja-B25 0.0055
18 175427 N175427-Abuja-B30 0.0051 19 33
B-33-Ikeja West-B14 0.0050
20 136
N136-Egbin T.S.-B10 0.0037
21 85 B-85-Benin-B21 0.0031 22 144 N144-Shiroro T.S. -B9 0.0014 23 20
N20-Jebba T.S.-B8 0.0011

120
Figure 5.18 The V-Q Sensitivities of all Buses for the Compensated NIPS.

121
The calculated bus participation factors at the least eigenvalue of 3.6755 for the compensated
NIPS are Maiduguri with a value of 0.4948 and Gombe with a value of 0.4412 as shown in
figure 5.19 with Maiduguri showing the highest contribution.
Figure 5.19 Bus Participation Factors of the Compensated NIPS at the Least Eigenvalue of
3.6755
The calculated branch participation factors for the compensated NIPS at the least eigenvalue of 3.6755 are L477-Jos- Gombe line, L429-Ajaokuta-Jos line, L469-Jos-Kaduna line, L517-Ikeja West- Benin line, L549-Enugu-Makurdi line, L453-Aba-Enugu line, L589-Aba-Onisha line, L445-Shiroro T.S – Kaduna line, L461-Kaduna – Kano line, with a value of 1.000, 0.6807, 0.6284, 0.5124, 0.4446, 0.3940, 0.2461, 0.2282, 0.2100 respectively. With L477 Jos – Gombe line having the highest value of 1.000 showing that it will contribute more to voltage collapse. The branch participation factors are shown in Figure 5.20

122
Figure 5.20 Branch Participation Factors of the Compensated NIPS
at the Least Eigenvalue of 3.6755
The calculated generator participation factors for the compensated system at the least eigenvalue
of 3.6755 are SM347 Shiroro, followed by SM-823 and SM-137202 Sapele with the following
values 1.000, 0.8212, 0.3494 respectively. SM347 has the highest contribution to voltage
instability as shown in Figure 5.21

123
Figure 5.21 Generator Participation Factors of the Compensated NIPS
at the Least Eigenvalue of 3.6755
The plot of the Q-V curves for the buses that will contribute highly to voltage instability as
shown in Figure 5.22 shows clearly that Maidugri will contribute highest to voltage collapse of
the system.

124
Figure 5.22 The Q-V Curves for the Compensated NIPS.

125
CHAPTER 6
ACHIEVEMENTS, CONTRIBUTIONS, RECOMMENDATIONS AND
CONCLUSION
6.1 Achivements of the Thesis
1. This thesis successfully modelled an interconnected large electric power system network that
continually track system changes and assess the voltage stability. The models are included in
Figure 5.1 and Figure 5.7 of pages 84 and 90 respectively.
2. A matlab program was developed for the simulation of the voltage stability of an
interconnected electric power system network. The program has the capability of running the
system load flow, determining the system eigenvalues, the Q-V sensitivity and the participation
factors.
3. The possible causes of voltage stability problems were identified in the thesis to include long
transmission lines, over loading of the network, generation and transmission line limitations and
inadequate reactive power support.
4. The sensitivities and the major contributing factors that provide insight into the system
characteristics that will assist in developing remedial actions as identified in the thesis are Q-V
Sensitivity, Generator, Bus and line participation factors these were determined in chapter five of
the work.
5. The above achievements were in line with the set out objectives as stated in purpose of the
study of Chapter one.
6.2 Contributions of the Thesis to Knowledge
The contribution of this work to knowledge can be summarized thus:
Development of Modal evaluation for voltage stability.
Development of a simulation model that included compensators in the interconnected
power system network.
Development of Simulation model for large scale electric power system using software
package operated in a Matlab environment.
Confirmation of results obtained from Modal technique using Q-V curves generated on
the suspected weak bus.

126
Computation of the system margin based on reactive power demand. This would help the
system operators to plan and compute the capacitive reactance of equipment required to
improve the system.
The power system reactive power margin computed with these techniques can be used to
design an expert system for the protection and control of electric power system.
This thesis demonstrated that the voltage stability computation with respect to system
parameters yields practical information useful for the control, planning and operation of
an interconnected electric power system network.
The results can be used to determine placement locations for reactive support and
Flexible Alternating Current Transmission System (FACTS) controllers in the
interconnected power system network.
6.3 Recommendation For Future Work
There are a number of issues that still need to be addressed in this subject area.
Simulation modelling of other interconnected power system componets such as
generators, transmission lines and flexible alternating current transmission system
(FACTS) controllers such as Static Synchronous Compensators (STATCOM), Static
Synchronous Series Compensator (SSSC), Thyristor Controlled Series Capacitor (TCSC),
Thyristor Controlled Phase Shifter (TCPS), Static VAr Compensator (SVC) to determine
their sensitivities and participation factors for overall system stability.
Incorporation of the method in this thesis for accounting for the effects of power system
controllers and stability on power dispatch and electricity market prices.
The effect of deregulation in the reliability of electric power system in Nigeria has generated a
lot of concern to the citizens of the country. The power utility company is in need of a reliability
indicator that can be tracked over time and used to quantitatively assess system reliability. This
role will be played by security margins. The first limit violation of the loading margin of a bus
could be used to compare different buses relative security at different time.

127
6.4 Conclusion
In this dissertation, voltage stability of an interconnected power system network is investigated
and assessed. Two interconnected power system networks were used as test systems they are:
The IEEE 14 Bus system and the Nigerian 330kV, 30Bus interconnected power system. The
systems were modelled using NEPLAN software operated in Matlab 7.5.0 environment. Power
system analysis tools (PAST) is used in the modelling of the systems. The systems were
modelled elements by elements with the parameters of each element included. The model for the
Nigerian system incorporated compensators identified in the various locations of the system grid.
The inclusion of these
compensators in the interconnected power system network resulted in a great improvement in the
voltage stability of the system.
The modelled network is simulated for investigation and assessment of voltage stability.
The following can be concluded:
1 The modal analysis technique is applied to investigate the stability of IEEE 14 bus system and
the uncompensated and compensated Nigerian interconnected 330kV, 30Bus power system
network. The method computes the smallest eigenvalue of the reduced Jacobian matrix using the
steady state system model. The magnitude of the smallest eigenvalue gives the measure of how
close the system is to voltage collapse. The Q-V sensitivity is used to identify the bus that has the
highest sensitivity which is the bus that will have highest contribution to voltage collapse .The
Q-V curve is used to confirm the result.Then the participation factors is used to identify the
weakest node or bus, branch and generator in the system associated with the minimum
eigenvalue.
2 The loadflow is calculated using the software, the nodes’ results showed that all the buses’
voltage ranges were within the acceptable (±5%) for the IEEE 14 Bus bus system and the
compensated NIPS, while the uncompensated system has acceptable voltages except Maiduguri,
Gombe and Jos with 0.9106, 0.9175 and 0.9359 respectively.
3 The Q-V sensitivity is used to determine the buses with highest sensitivity and the identified
buses are Maiduguri with sensitivity figures of 0.1474 followed by Gombe, Kano and Jos with
0.1312, 0.0823 and 0.0370 respectively for the uncompensated Nigerian system while the
compensated system has Maiduguri with sensitivity figures of 0.1398 followed by Gombe, Kano
and Jos with 0.1247, 0.0807 and 0.0351

128
respectively.The results show that the compensated Nigerian system has reduced Q-V sensitivity
values which is an indication of improved stability of the system.
4 The buses with highest participation factors at the least eigenvalue of 3.1549 are
Maidugri and Gombe with figures of 0.4960 and 0.4413 respectively. The branches with highest
participation factors at the least eigenvalue of 3.1549 are L469-Jos- Kaduna B19-B17, L517-
Ikeja West – Benin B14 to B21, L453- Aba-Enugu B24-B26 L421- Jebba TS – Shiroro T.S B8-
B9, L445- Shiroro T.S – Kaduna B9 – B17, L597 – Afam – Aba B5 – B24 with the figures of
1.0000, 0.4706, 0.2584, 0.2263, 0.2232 and 0.2170 respectively. The generators with highest
participation factor at the least eigenvalue of 3.4951 are SM 347-Shiroro and SM 823 with
figures of 1.0000 and 0.7939 respectively.
5 The use of compensators in the interconnected power system network resulted in a great
improvement in the voltage stability of the system.

129
References
[1] Taylor, C.W; ‘Power System Voltage Stability; MacGraw-Hill, 1994
[2] Y. Tamura, H. Mori and S. Iwamoto, “ Relationship between Voltage Stability and Multiple
Load Flow Solution in Electric Systems,” IEEE Trans. On Power Apparatus and Systems, Vol.
PAS-102, pp.1115-1123, May 1983.
[3] P.A Lof, T. Smed, C. Anderson and D.J.Hill, “ Fast Calculation of a Voltage Stability Index,”
IEEE Trans. on Power Systems, Vol.7, pp59-64, Feb.1992.
[4] CIGRE Task Force 38-01-10,: “Modelling of Voltage Collapse including dynamic
phenomenon”, 1993.
[5] Abhijit Chakrabarti and Sunita Halder “Power System Analysis Operation and Control” PHI
Learning Private Limited, New Delhi, 2008.
[6] P.A. Lof, G. Anderson and D.J. Hill, “Voltage Stability Indices For Stressed Power
System”, IEEE Trans. on Power Systems, Vol. 8, 326-335, Feb. 1993.
[7] B. Gao, G.Morison and P. Kundur, “Voltage Stability Evaluation Using Modal Analysis”,
IEEE Trans. On Power Systems, Vol.7, No.4, pp. 1423-1543, Nov. 1992.
[8] H.G. Kwanti, A.K. Pasrija and L. Y. Bahar, “Static Bifucation in Electric Power Networks:
Loss of Steady- State Stability and Voltage Collapse,” IEEE Trans. on Circuits and Systems Vol.
CAS-33, pp.981-991, Oct. 1986.
[9] V. Ajjarapu, and B. Lee “Bibliograph on voltage Stability” IEEE Trans. on Power Systems,
vol. 13 pp 115- 125, 1998.
[10] Z. Feng, V. Ajjarapu, and D.J Maratukulam, “A Comprehensive Approach for Preventive
and Connective Control to Mitigate Voltage Collapse, IEEE Transactions on Power Systems PE
– 290PRS 1999.
[11] G.C. Ejebe, “Power Transmission Systems” Power System Analysis Seminar Nnamdi
Azikiwe University, Awka, December 21, 2006.
[12] IEEE/CIGRE Joint Task Force on Stability Terms and Definitions, “Definitions and
Classification of Power System Stability, Vol.19, no.3, August 2004, pp. 1387-1401.
[13] P. Kundur, “Power System Stability and Control” New York: McGraw-Hill,1994. [14] G.C.
Bullock, “Cascading Voltage Collapse in West Tennessee, August 22, 1987, “Western Protective
Relaying Conference, October 1990.

130
[15] S. Johnsson, and F. Sjogreen, “Voltage Collapse in Power Systems; The influence of
generator current limiters, on-load tap changers and dynamics,” Thesis, Chalmers University of
Technology, Gotenbery, Sweden, 1995, ISBN:91-7197-119-K.
[16] P.Kessel and H.Glavitsh, “Estimating the Voltage Stability of a Power System,”IEEE Trans.
On Power Delivery, Vol.1 pp.346-353, July1986.
[17] T.Cutsem, “ A method to Compute Reactive Power margins with respect to Voltage,” IEEE
Trans On Power Systems, Vol.PWRS-6, No.2, pp.145-156, Feb.1988.
[18] H.D.Chiang, I. Dobson,L. Fekih-Ahmed, R.J.Thomas and J.S.Thorp ” On Voltage Collapse
in electric power Systems” IEEE Trans. On Power Systems, Vol. 5, pp.601-611,May 1990.
[19] R. DOAquila, N.W. Miller, K.M. Jimma, M.T Shehan, and G.L.Comegys,”Voltage Stability
of the Puget Sound System under Abnormally Cold Weather Conditions,” IEEE Trans. On
Power Systems, Vol.8, pp.1133-1142,Aug. 1993.
[20] J. D. Glover and M.S. Sarma, “ Power System Analysis and Design”. 3rd Edition
Wadsworth Group, Brooks Cole, a division of Thomson Learning Inc.
[21] F.A. Somolu, “Maintaining an Interconnected Electric Grid with Inadequate Scada
Facilities”. Engineering Focus Jan/April 1992.
[22] P. Anil, H. Mark and T.R. Gaunt “Estimation of Outages in Overhead Distribution Systems
of South Africa and of Manhattan, Kansas, USA.7th International Conference on Power System
Operation and planning, Cape Town, South Africa. 2007
[23] O. S. Onohaebi, “ Power Outages in the Nigeria Transmission Grid Research Journal of
Applied Sciences 4(1): 1-9, 2009 ISSN. 1815-932X Medwell Journals, 2009.
[24] O.S. Onohaebi and S.O. Igbinovia “ Voltage Dips Reduction in the Nigeria 330kV
Transmission Grid” Journal of Engineering and Applied Sciences 3(6):496-503, ISSN: 1816-
949X
Medwell Journals, 2008.
[25] J. Sadoh “ Ph.D. Thesis on Power System Protection : Investigation of System Protection
Schemes on the 330kV of Nigeria Transmission Network” Unpublished University of Benin,
pp.27.
[26] “Electrical Power- Overview. Nigeria: Elecric Power.” Electrical Power.
http://www.mbendi.co.za 2010.

131
[27] B. Caven “A Study of Voltage Profile in the NEPA Network: Analysis and
Recommendations”. Engineering Focus Jan/April 1992.
[28] N. Flatabo, R.Ognedal, and T. Carlsen “Voltage Stability Condition in a Power
Transmission System Calculated by Sensitivity Methods”. IEEE Tran. On Power System. Vol.5.
No.4 Nov.1990.
[29] EPRI technical report, “ Methodology for the Introgression HDVC links in large A/C
System-phase-2. Advanced Concept,” Vol. 1 EL – 4365, April,1987.
[30] IEEE Working Group on Voltage Stability, “Suggested techniques for voltage stability
analysis”, IEEE Publications 1993.
[31] IEEE Working Group on voltage stability, “Voltage Stability of power system: Concepts,
Analytical tools and industrial experience”, IEEE Publications 90THO358-2-PWR1990
[32] IEEE/PES publications on “Voltage Stability Assessment: Concepts, Practices, and tools”,
IEEE/PES publications. Final Draft August 2002.
[33] L. M. Hajagos and B. Danai., Laboratory measurement and models of modern loads and
their effect on voltage stability studies, IEEE Transactions on power systems, Vol. 13, No.2,
May 1998, pp. 584-591.
[34] EPRI Code Manual “Extended Transient – Midterm stability Package. User’s Manual for
the Power Plan Program.” CL – 2002 – CCM January 1987.
[35] F.D.Galiana and Z.C.Zeng,” Analysis of the load Behavior near Jacobian Singularity,”
IEEE Trans. On Power Systems, Vol. 7, pp1529 -1542, Nov.1992.
[36] M.M Begovic and A.G. Phadice, “Voltage Stability Assessment through measurement of a
reduced state vector,” IEEE Trans. On Power Systems, Vol. 5 pp.198-203,Feb.1990.
[37] E.Vaahedi, Y.Mansour and D.Sun, “Large Scale Voltage Stability Constrained optimal
planning and Voltage Stability Applications Using Existing OPF/Optimal Var Planning Tools,”
IEEE Trans. On Power Systems Vol.14, No.1, Feb.1999.
[38] A.EL-Keit and X. Ma, “Application of Artificial Neural Networks In Voltage Stability
Assessment,” IEEE Trans. On Power System, Vol 10, No.4,pp.1890-1896.
Nov.1995.

132
[39] C. Liu, C. Chang, and M.Su, “Neuro-Fuzzy Networks for Voltage Security Monitoring
based on Synchronous Phasor Measurements,” IEEE Trans. On Power System, Vol. 13, No.2
May 1998.
[40] T.Overbye and C. Demarco, “Improved Power System Stability Assessment Using Energy
Method ,” IEEE Trans. On Power System, Vol.6, No.4 pp.1890-1896, Nov.1995.
[41] C.DeMarco and T.Overby,” An Energy based Security measure for Assessing Vulnerability
to Voltage Collapse,’ IEEE Trans.on Power System, Vol.5, no.2,pp.419-427,May1990.
[42] C.Barbier and J.P Barret,” Analysis of Phenomena of Voltage Collapse on a Transmission
System, “Review Generale de OI electricite, Vol.89,pp672-690,Oct.1980.
[43] P.A. Lof, G. Anderson and D.J. Hill, “ Voltage Stability Indices For Stressed Power
System”, IEEE Trans. On Power Systems. Vol. 8, 326-335, Feb.1993
[44] Y. Mansour, W.Xu, F.Alverado, and C.Rinzin. “SVC Placement Using Critical Modes of
Voltage Instability,” IEEE Trans. On Power Systems, Vol.9, no.2 pp.757-763,May 1994.
[45] M.Suzuki, S.Wada, T. Asano, and K.Kudo, “Newly Developed Voltage Security
Monitoring System,” IEEE Trans on Power System.Vol 7, no3, pp.965-972,August 1992.
[46] M. Chau, “Understanding voltage collapse in Bulk transmission System.” EPRI Proceedings
on Voltage Collapse. Potasi. MO. Sept. 18-23 1988.
[47] S. Abe, “ Power System Voltage Stability” IEEE Trans. PAS 101 No.10 pp. 3830-3840,
Oct., 1982.
[48] B. Bhargava , Synchronized phasors measurement System projectat South California Edison
Co. Proceedings of IEEE PES Summer Meetings, pp. 16-22 1999.
[49] V. Brandwajn and M.G. Lauby “ Complete bounding method for AC contingency screening
IEEE Transaction on power systems, Vol.4, No.2 pp.724-728 May 1989.
[50] R.R Austria “ Integrated approach to Transmission limit calculation IEEE Computer
Application in Power, pp. 48-52, January 1995.
[51] A Borizzi, P. Linazzi, “ First and second order method for voltage assessment and security
enhancement. Transaction on power systems, vol. 13 No. 2, pp. 543-551 May 1998.

133
[52] J. Boatman, “ Comparison of solution algorithms in point of collapse method, proceeding
of 13th power system computation conference, Trondheim Norway, pp. 451-455 June 1999.
[53] E. Vaahali, “ Voltage stability contingency screening and ranking IEEE Transactions on
power systems Vol.14, No.1, pp. 256-261, February 1999.
[54] R. Lind and D. Karlsson., “Distribution system modeling for voltage stability studies, IEEE
Transactions on power systems, Vol.11 No. 8 pp. 1677-1687 November 1996.
[55] Voltage Security assessment tool (VSAT), Product brochure Power tech labs Inc, the
information is available at http://www.powertech.bc.cal,2010.
[56] R. Hironen and I. Pottonen, “ Low voltage after a disturbance in the Finish 400kV network,
Proceedings of the International symposium on Bulk Power system Voltage Phenomena 111,
Davos, Switzerland, August 1994.
[57] IEEE Special Publication, “Techniques for Power System Stability limit Search”, TP-138-0,
1999.
[58] S. Repo, Data analysis in static voltage stability, Proceeding of the 6th International
Conference on Probabilistic Methods Applied to Power System (PMAPS) Madeira, Portugal,
September 2000
[59] R. A. Johnson and D. W. Wichern “ Applied multivariate statistical analysis Prentice Hall,
London, UK, pp.642, 1992.
[60] C.A. Canizres, “ Voltage Collapse and Transient Energy Function Analysis of AC/DC
Systems” Ph.D Thesis. University of Wisconsin-Madison. USA. 1991.
[61] W.D Rosehart “Optimization of Power Systems With Voltage Security Constraints” Ph.D
Thesis. University of Waterloo. Ontario. Ca. 2000.
[62] R.A. Schlueter, K.B.Kilani and U.Ahu, “Impact of Modeling Accuracy on Type, and Class
of Stability Problems In A Power System Model”, Bulk Power System Phenomena 111, Voltage
Stability, Security and Control, ECC, Davos, pp.117-156, 1994.
[63] M.K. Pal, “ Voltage Stability conditions considering load characteristics”, IEEE
Transactions on Power Systems, Vol.7 No.pp.243-249,1992.

134
[64] D.J Hill and I.A. Hiskens, “ Load Recovery in Voltage Stability Analysis and Control “,
Bulk Power System Phenomena 111, Voltage Stability, Security and Control, pp 579-595, Ecc,
Davos, August 1994.
[65] H.G.Kwatny, A.K.Pasrija, and L.Y.Bahar, “Loss of Steady State Stability and Voltage
Collapse in Electric Power Systems”, Proc.IEEE Conference on Decision and Control, Ft.
Landerdale, FL, pp.804-811, Dec.1985.
[66] P.A.Lof, T.Smed, G.Anderson and D.J.Hill, “Fast Calculation of a voltage stability index”,
IEEE Transactions on Power Systems, Vol.7, No.1, pp. 54-64, 1992.
[67] IEEE working group of voltage stability “Suggested Techniques for voltage stability
Analysis”, 93TH0620-5PWR,1993.
[68] C.A. Canizares and F.L.Alvarado, “Point of Collapse and continuation methods for large
AC/DC systems”, IEEE Trans. On Power Systems, Vol.8, No.1, pp 1-8, Feb. 1993.
[69] IEEE Working Group K12, Voltage Collapse Mitigation. IEEE Power System Relaying
Committee, 1996.
[70] Obadina O.O. and Berg G. J. Determination of Voltage Stability Limit in multi-machine
power systems, IEEE Transactions on Power Systems, Vol.3, No.4 pp. 1545-1552, November
1988.
[71] T.J Overbye “Use of Energy Methods for online Assessment of Power System Security,
IEEE Transactions on Power Systems, Vol. 8, No.2, pp. 452-458, May 1993.
[72] Power System Simulator for Engineering (PSS/E-26.1), Program Manual, Power
Technologies Inc. Schenectady, New York, USA 2000.
[73] Abhijit Chakrabarti; Sunita Halder “Power System Analysis Operation and Control” PHI
Learning Private Limited, New Delhi-11001, 2008.
[74] J.E Flood, “Telecommunication Networks” Peter peregrinus, Ltd Southgate House,
Stevenage, Herts. England 1997, pp.301.
[75] F.Milano, Power System Analysis Toolbox (PSAT), Version 1.3.4,User Manual, 2005,
available at http://www.power.uwaterloo.ca/~fmilano.
[76] F. P. Demello and C. Concordia, “Concepts of synchronous machine stability as affected by
excitation control,” IEEE Trans. Power Apparatus and Systems, Vol. PAS-88, No.4, pp. 316-
329, April 1969.

135
[77] Power System Toolbox (PST) Version 2.0: Dynamics Tutorial and Functions, Cherry Tree
Scientific Software, 2002.
[78] P.M Anderson and A. A. Fouad, Power System Control and Stability, IEEE Press,
Piscataway, NJ, 1994.
[79] P.Sauer and M. Pai, Power System Dynamics and Stability. Prentice Hall, Upper Saddle
River, NJ, 1998.
[80] CIGRE Report, “Static VAR Compensators.’ Prepared by WG 38-01, Task Force No. 2,
Paris, 1982.
[81] U.S. Department of Energy Report, “Static Reactive Power Compensators for High Voltage
Power Systems,” Prepared by General Electric Company, DOE/NBM-1010, March 1982.
[82] IEEE Special Stability Controls Working Group Report, “Static Var Compensator Models
for Power Flow and Dynamic Performance Simulation,” Paper 93WM173-5-PWRS,Presented at
the IEEE PES Winter Meeting, Columbus, Ohio, February 1993.
[83] D.Y. Wong and P.Kundur, “Eigenvalue Analysis of Very Large Power System” IEEE
Transaction Power System. PWRS-5.No.2, pp. 635-642 May 1990.
[84] B.Long and V. Ajjarapu “The Sparse Formulation of LSPS and its Application to voltage
stability Margin Sensitivity and Estimation”. IEEE Transactions on Power Systems, Vol. 14,
No.3, pp. 944-957, August 1999.
[85] IEEE Committee Report, “ Voltage Stability of Power System: Concepts, Analytical Tools,
and Industry Experience”, IEEE/PES 90THO358-2-PWR,1990.
[86] D. Karlsson “ Voltage Stability Simulation Using Detailed Models Based on Field
Measurement”, Ph.D. Thesis, ISBN 91-7032-725-4, teborgoG , Sweden, 1992.
[87] D.J. Hill “Nonlinear Dynamic Load Models with Recovery for Voltage Stability Studies”,
IEEE/PES 1992 Winter Meeting, New York, 1992.
[88] D. Karlsson, K. Linden, I. Segerqvist and B. Stenborg, “Temporary load-voltage
characteristics for voltage stability studies- Field and Laboratory measurements”, Cigre report
38-204, 1992.
[89] IEEE working group of voltage stability “Suggested Techniques for Voltage Stability
Analysis”, 93TH0620-5PWR,1993.

136
[90] C.A.Canizares and F.L.Alvarado, “Point of collapse and continuation methods for large
AC\DC systems,” IEEE Trans on Power systems, vol.8, No.1, pp 1-8, Feb; 1993.
[91] Y. Tamura, H. Mori and S. Iwamoto, “ Relationship between voltage collapse and multiple
load flow solutions in electric power systems”, IEEE Trans. Vol, PAS-102, No. 5, pp-1115-1123,
May 1982.
[92] Y.Tamura and K. Sakamoto. “Voltage instability Proximity Index (VIPI) Based on Multiple
Load Flow Solution in 111-Conditioned Power Systems”, Proc. of the 27th Conf. on Decision
and Control, Austin, Texas, pp-2114-2119, Dec.1988.
[93] P. Kessel and H. Glavitch, “ Estimating the Voltage stability of a power system ,” IEEE
Trans.Vol. PWRD-1, No. 3, pp.346-354, July 1986.
[94] C.L. Demarco, T. J. Overbye, “ An Energy based security measure for assessing
vulnerability to voltage collapse,” IEEE Trans. On Power Systems, Vol. 6, No.2 pp. 419-427,
May 1990.
[95] IEEE/CIGRE Joint Task Force on Stability Terms and Definitions, “Definitions and
Classification of Power System Stability, Vol.19, no.3, pp. 1387-1401, August 2004.
[96] Y. Tamura, H. Mori and S. Iwamoto, “ Relationship between Voltage Stability and Multiple
Load Flow Solution in Electric Systems,” IEEE Trans. On Power Apparatus and Systems, Vol.
PAS-102, pp.1115-1123, May 1983.
[97] P.A Lof, G. Anderson and D.J Hill, Voltage dependent reactive power limits for voltage
stability studies,” IEEE Trans. Power Systems, Vol.10, pp 220-228, February 1995.
[98] C. Rajagopalan, P. W. Sauer and M.A. Pai, “ An integrated approach to dynamic and static
voltage stability,” Proc. American Control Conference, Pittsburg, PA, Vol.3,pp.1231-1235 June
1989.
[99] B. H. Lee and K. Y. Lee, “ A study on voltage collapse mechanism in electric power
systems,” IEEE Trans. On Power Systems, Vol. 6, No. 3, pp. 966-974 August 1991.
[100] C. C. Liu and K. T. Vu, “ Analysis of tap-changer dynamics and construction of voltage
stability regions,” IEEE Trans. On Circuit and Systems, Vol. 36, pp. 575-590, April 1989.

137
[101] G. Verghes, I. Perez-Arriaga and F.Schwwppe, “Selective modal Analysis with
Application to Electric Power Systems”, Part 11 IEEE trans, on Power App. and system, Vol.
PAS 101, No. 9, pp 3117-3134, 1982
[102] IEEE Working Group on a “Common Format for the Exchange of Solved Load Flow
Data”, IEEE Transactions on Power Apparaus and Systems, Vol. PAS-92, No.6, pp.1916-1925,
November/December 1973.

138
Appendix A
IEEE 14 Bus System Load Flow Data
Table 5.1 Line Data for IEEE 14 Bus System Length 1KM
Source [102]
ID Name R(1) X(1) C(1) B(0) Ohm/… Ohm/… uF/… Us/… 1. 421 Branch-3 2.237193 9.425351 2.92837 919.975 2. 424 Branch-2 2.572368 10.61893 3.289402 1033.396 3. 427 Branch-1 0.922681 2.817083 3.53009 1109.01 4. 430 Branch-7 0.635593 2.004857 0.855779 268.851 5. 433 Branch-6 3.190346 8.142738 2.313279 726.738 6. 436 Branch-5 2.711389 8.278426 2.273164 714.136 7. 439 Branch-4 2.766617 8.394595 2.50048 785.549 8. 442 Branch-13 0.125976 0.248086 0 0 9. 445 Branch-12 0.234069 0.487164 0 0 10. 448 Branch-11 0.180879 0.378785 0 0 11. 451 Branch-19 0.42072 0.380651 0 0 12. 454 Branch-18 0.156256 0.365778 0 0 13. 457 Branch-17 0.242068 0.514911 0 0 14. 460 Branch-16 0.060578 0.160921 0 0 15. 463 Branch-15 0 0.209503 0 0 16. 466 Branch-20 0.325519 0.662769 0 0

139
Appendix B
IEEE 14 Bus System Load Flow Data
Table 5.2 Load Distribution for IEEE 14 Bus System
[102]
ID Name LF Type P MW
Q MVAR
1. 686 Load 2 PQ 21.7 12.7 2. 687 Load 6 PQ 11.2 7.5 3. 688 Load 5 PQ 7.6 1.6 4. 689 Load 4 PQ 47.8 4 5. 690 Load 3 PQ 94.2 19 6. 691 Load 11 PQ 3.5 1.8 7. 692 Load 10 PQ 9 5.8 8. 693 Load 9 PQ 29.5 16.6 9. 694 Load 7 PQ 0 0 10. 695 Load 14 PQ 14.9 5 11. 696 Load 13 PQ 13.5 5.8 12. 697 Load 12 PQ 6.1 1.6

140
Appendix c
Table 5.4 Line Data for NIPS Length 1KM
[11]
ID Name From To R(1) X(1) C(1) B(0) Ohm/… Ohm/… uF/… Us/… 17. 373 L373 B11 B6 13.26402 21.75822 0.000245 0.077 18. 389 L389 B6 B8 0.835 6.52 0.0012 0.377 19. 405 L405 B12 B8 0.7623 5.5466 0.0034 1.068 20. 413 L413 B20 B28 2.2869 16.63992 0.001685 0.529 21. 421 L421 B9 B8 5.21631 39.26934 0.001751 0.55 22. 429 L429 B19 B29 5.21631 39.2693 0.00175 0.55 23. 437 L437 B3 B9 0.20691 1.60083 1.8e-005 0.006 24. 445 L445 B17 B9 1.0291 7.7265 0.0014 0.44 25. 453 L453 B24 B26 2.05821 15.45291 0.000693 0.218 26. 461 L461 B17 B18 10.08414 76.79628 0.000864 0.271 27. 469 L469 B17 B19 7.81001 66.30921 0.000743 0.233 28. 477 L477 B19 B20 12.82842 96.57252 0.001082 0.34 29. 485 L485 B2 B8 0.20691 1.60083 1.8e-005 0.006 30. 493 L493 B12 B13 4.61736 35.19648 0.000396 0.124 31. 501 L501 B12 B14 9.62676 80.3682 0.000904 0.284 32. 509 L509 B13 B14 5.0094 38.3328 0.000496 0.156 33. 517 L517 B14 B21 2.9948 22.5423 0.004 1.257 34. 541 L541 B22 B21 2.0854 15.6925 0.0028 0.88 35. 549 L549 B29 B26 2.0854 15.6925 0.0028 0.88 36. 557 L557 B21 B1 0.5391 4.0239 0.00072 0.226 37. 573 L573 B21 B23 2.9294 22.0523 0.00098 0.308 38. 589 L589 B23 B24 5.79348 44.15895 0.000497 0.156 39. 597 L597 B24 B5 1.06722 8.03682 9.02e-005 0.028 40. 605 L605 B10 B14 0.6534 5.31432 0.000211 0.066 41. 613 L613 B10 B14 0.6534 5.31432 0.000211 0.066 42. 621 L621 B10 B16 0.3267 2.40669 0.000108 0.034 43. 629 L629 B10 B15 3.29967 24.78564 0.000278 0.087 44. 637 L637 B14 B15 0.35937 145.0548 0.000122 0.038 45. 645 L645 B14 B15 0.35937 145.0548 0.000122 0.038 46. 661 L661 B1 B25 2.70072 20.26629 0.000227 0.071 47. 669 L669 B1 B7 2.85318 21.75822 0.000245 0.077 48. 677 L677 B7 B25 1.11078 8.37441 9.38e-005 0.029 49. 685 L685 B4 B10 0.60984 4.82427 0.000884 0.278 50. 732 L732 B23 B26 3 20 0.000332 0.104 51. 829 L829 B30 B9 0.5391 4.0239 0.00072 0.226 52. 175409 L175409 B11 B27 1.4265 10.879 0.00049 0.154

141
Appendix D
Table 5.5 Load Distribution for NIPS
[11]
ID Name LF Type P MW
Q MVAR
13. 182 Load 11 PQ 56.4 42.3 14. 207 Load 14 PQ 332 249 15. 201 Load 13 PQ 133 97.5 16. 213 Load 10 PQ 80 60 17. 286 Load 16 PQ 95 71.25 18. 298 Load 25 PQ 20 15 19. 292 Load 15 PQ 228 171 20. 316 Load 23 PQ 86 64.5 21. 310 Load 24 PQ 264.8 198 22. 304 Load 26 PQ 90 67.5 23. 334 Load 9 PQ 109.6 82.2 24. 322 Load 21 PQ 124.2 93.3 25. 340 Load 17 PQ 390 0 26. 364 Load 19 PQ 65 48.75 27. 370 Load 20 PQ 132.8 99.6 28. 764 Load 18 PQ 130 60 29. 779 Load 12 PQ 144.9 108.68 30. 773 Load 8 PQ 7.9 5.93 31. 175351 Load 22 PQ 20 15 32. 175420 Load 27 PQ 56.4 42.3 33. 175457 Load 30 PQ 130 60 34. 175482 Load 29 PQ 83.45 61.22 35. 175506 Load 28 PQ 80 60

142
E.1 Matlab Code For Load flow program ***************************************************************** *Author…………………………………………….:Engr. F.O. Enemuoh *Registration Number………….:PG/Ph.D/03/35105 *Project Supervisor…………….:Ven. Engr. Prof. T. C. Madueme *Project Title………………………….: Simulation Modelling of Voltage Stability of 330kV,30Bus Interconnected Power System Network. % This program obtains the Bus Admittance Matrix for power flow solution j=sqrt(-1); i = sqrt(-1); nl = linedata(:,1); nr = linedata(:,2); R = linedata(:,3); X = linedata(:,4); Bc = j*linedata(:,5); a = linedata(:, 6); nbr=length(linedata(:,1)); nbus = max(max(nl), max(nr)); Z = R + j*X; y= ones(nbr,1)./Z; %branch admittance for n = 1:nbr if a(n) <= 0 a(n) = 1; else end Ybus=zeros(nbus,nbus); % initialize Ybus to zero % formation of the off diagonal elements for k=1:nbr; Ybus(nl(k),nr(k))=Ybus(nl(k),nr(k))-y(k)/a(k); Ybus(nr(k),nl(k))=Ybus(nl(k),nr(k)); end end % formation of the diagonal elements for n=1:nbus for k=1:nbr if nl(k)==n Ybus(n,n) = Ybus(n,n)+y(k)/(a(k)^2) + Bc(k); elseif nr(k)==n Ybus(n,n) = Ybus(n,n)+y(k) +Bc(k); else, end end end clear Pgg function [Fij, Jij, Hij, Fji, Jji, Hji] = fm_flows(type, mu1, mu2) % FM_FLOWS compute current, active power and apparent power flow % in transmission lines and the associated Jacobian and % Hessian matrices % %[FIJ, JIJ, HIJ, FJI, JJI, HJI] = FM_FLOWS(TYPE,MU1,MU2) % % TYPE -> type of flows computations: (1) current flows % (2) active power flows % (3) apparent power flows % % MU1 -> column vector (Line.n,1) of Lagrangian multipliers for (i->j) % MU2 -> column vector (Line.n,1) of Lagrangian multipliers for (j->i) % % FIJ -> column vector (Line.n,1) of flows from bus "i" to bus "j" % JIJ -> Jacobian matrix (Line.n,Bus.n) from bus "i" to bus "j" % HIJ -> Hessian matrix (Bus.n,Bus.n) from bus "i" to bus "j" % % FJI -> column vector (Line.n,1) of flows from bus "j" to bus "i" % JJI -> Jacobian matrix (Line.n,Bus.n) from bus "j" to bus "i" % HJI -> Hessian matrix (Bus.n,Bus.n) from bus "j" to bus "i"

143
global Line Bus DAE jay % ========================================================================== % line flow solution % ========================================================================== tps = Line.con(:,11).*exp(jay*Line.con(:,12)*pi/180); VV = DAE.V.*exp(jay*DAE.a); r = Line.con(:,8); rx = Line.con(:,9); chrg = Line.con(:,10)/2; z = r + jay*rx; y = 1./z; g = real(y); b = imag(y); nl = [1:Line.n]; switch type case 1 % ========================================================================== % AC Current Flows, Jacobian and Hessian % ========================================================================== Fij = ((VV(Line.from) - tps.*VV(Line.to)).*y + ... VV(Line.from).*(jay*chrg))./(tps.*conj(tps)); Fij = abs(Fij).^2; Fji = (VV(Line.to) - VV(Line.from)./tps).*y + VV(Line.to).*(jay*chrg); Fji = abs(Fji).^2; ati = imag(tps); atr = real(tps); cij = cos(DAE.a(Line.from)-DAE.a(Line.to)); sij = sin(DAE.a(Line.from)-DAE.a(Line.to)); g2 = g.^2; b2 = b.^2; at1 = ati.^2+atr.^2; at2 = at1.*at1; Vij = DAE.V(Line.from).*DAE.V(Line.to); Vi = DAE.V(Line.from); Vj = DAE.V(Line.to); a1 = ati.*b.*chrg; a2 = ati.*g2; a3 = atr.*g.*chrg; a4 = atr.*g2; a5 = ati.*g.*chrg; a6 = atr.*b2;

144
a7 = atr.*b.*chrg; a8 = ati.*b2; c1 = a4+a5+a6+a7; c2 = a1+a2-a3+a8; c3 = a1+a2+a3+a8; c4 = a4-a5+a6+a7; d1 = 2*((chrg+b).^2+g2)./at2; d2 = 2*at1.*(b2+g2)./at2; d4 = 2*((chrg+b).^2+g2)./at1; d3 = 2*(g2+b2)./at1; e1 = 2*(c2.*sij+c1.*cij)./at2; e2 = 2*(c2.*cij-c1.*sij)./at2; e3 = 2*(c3.*sij+c4.*cij)./at1; e4 = 2*(c3.*cij-c4.*sij)./at1; Jij = [sparse(nl,Line.from,-Vij.*e2,Line.n,Bus.n) + ... sparse(nl,Line.to, Vij.*e2,Line.n,Bus.n), ... sparse(nl,Line.from, Vi.*d1 - Vj.*e1,Line.n,Bus.n) + ... sparse(nl,Line.to, Vj.*d2 - Vi.*e1,Line.n,Bus.n)]; Jji = [sparse(nl,Line.from,-Vij.*e4,Line.n,Bus.n) + ... sparse(nl,Line.to, Vij.*e4,Line.n,Bus.n), ... sparse(nl,Line.from, Vi.*d3 - Vj.*e3,Line.n,Bus.n) + ... sparse(nl,Line.to, Vj.*at1.*d4 - Vi.*e3,Line.n,Bus.n)]; a1 = mu1.*Vij.*e1; a2 = -mu1.*Vj.*e2; a3 = -mu1.*Vi.*e2; a4 = mu1.*d1; a5 = -mu1.*e1; a6 = mu1.*d2; Hij = [sparse(Line.from, Line.from, a1, Bus.n, Bus.n) + ... sparse(Line.from, Line.to, -a1, Bus.n, Bus.n) + ... sparse(Line.to, Line.from,-a1, Bus.n, Bus.n) + ... sparse(Line.to, Line.to, a1, Bus.n, Bus.n), ... sparse(Line.from, Line.from, a2, Bus.n, Bus.n) + ... sparse(Line.from, Line.to, a3, Bus.n, Bus.n) + ... sparse(Line.to, Line.from,-a2, Bus.n, Bus.n) + ... sparse(Line.to, Line.to, -a3, Bus.n, Bus.n); ... sparse(Line.from, Line.from, a2, Bus.n, Bus.n) + ... sparse(Line.from, Line.to, -a2, Bus.n, Bus.n) + ... sparse(Line.to, Line.from, a3, Bus.n, Bus.n) + ... sparse(Line.to, Line.to, -a3, Bus.n, Bus.n), ... sparse(Line.from, Line.from, a4, Bus.n, Bus.n) + ... sparse(Line.from, Line.to, a5, Bus.n, Bus.n) + ... sparse(Line.to, Line.from, a5, Bus.n, Bus.n) + ... sparse(Line.to, Line.to, a6, Bus.n, Bus.n)]; a1 = mu2.*Vij.*e3; a2 = -mu2.*Vj.*e4; a3 = -mu2.*Vi.*e4; a4 = mu2.*d3; a5 = -mu2.*e3; a6 = mu2.*d4.*at1; Hji = [sparse(Line.from, Line.from, a1, Bus.n, Bus.n) + ... sparse(Line.from, Line.to, -a1, Bus.n, Bus.n) + ... sparse(Line.to, Line.from,-a1, Bus.n, Bus.n) + ... sparse(Line.to, Line.to, a1, Bus.n, Bus.n), ... sparse(Line.from, Line.from, a2, Bus.n, Bus.n) + ... sparse(Line.from, Line.to, a3, Bus.n, Bus.n) + ... sparse(Line.to, Line.from,-a2, Bus.n, Bus.n) + ... sparse(Line.to, Line.to, -a3, Bus.n, Bus.n); ...

145
sparse(Line.from, Line.from, a2, Bus.n, Bus.n) + ... sparse(Line.from, Line.to, -a2, Bus.n, Bus.n) + ... sparse(Line.to, Line.from, a3, Bus.n, Bus.n) + ... sparse(Line.to, Line.to, -a3, Bus.n, Bus.n), ... sparse(Line.from, Line.from, a4, Bus.n, Bus.n) + ... sparse(Line.from, Line.to, a5, Bus.n, Bus.n) + ... sparse(Line.to, Line.from, a5, Bus.n, Bus.n) + ... sparse(Line.to, Line.to, a6, Bus.n, Bus.n)]; case 2 % ========================================================================== % AC active power flows in each line from bus i to bus j % ========================================================================== Fij = VV(Line.from).*conj(((VV(Line.from) - tps.*VV(Line.to)).*y + ... VV(Line.from).*(jay*chrg))./(tps.*conj(tps))); Fij = real(Fij).^2; Fji = VV(Line.to).*conj((VV(Line.to) - VV(Line.from)./tps).*y ... + VV(Line.to).*(jay*chrg)); Fji = real(Fji).^2; ati = imag(tps); atr = real(tps); cji = cos(DAE.a(Line.to)-DAE.a(Line.from)); sji = sin(DAE.a(Line.to)-DAE.a(Line.from)); g2 = g.^2; b2 = b.^2; at2 = ati.^2+atr.^2; at4 = at2.^2; a1 = atr.*b.*cji; a2 = atr.*g.*sji; a3 = ati.*b.*sji; a4 = ati.*g.*cji; a5 = atr.*b.*sji; a6 = atr.*g.*cji; a7 = ati.*b.*cji; a8 = ati.*g.*sji; Vij = DAE.V(Line.from).*DAE.V(Line.to); Vi2 = DAE.V(Line.from).^2; Vj2 = DAE.V(Line.to).^2; Vi3 = DAE.V(Line.from).*Vi2; Vj3 = DAE.V(Line.to).*Vj2; v1 = Vi2.*Vj2; v2 = Vi3.*DAE.V(Line.to); v3 = Vj3.*DAE.V(Line.from); v4 = Vi2.*DAE.V(Line.to); v5 = Vj2.*DAE.V(Line.from); B1 = -a1 - a2 + a3 - a4; B2 = a5 - a6 + a7 + a8; B3 = -a5 - a6 - a7 + a8; B4 = -a1 + a2 + a3 + a4; C1 = B1.*B1; C2 = B2.*B2; C3 = B1.*B2; C4 = B3.*B3; C5 = B4.*B4; C6 = B3.*B4; C7 = B1.*g; C8 = B2.*g;

146
C9 = B3.*g.*at2; C0 = B4.*g.*at2; Jij = [sparse(nl,Line.from, 2*(v1.*C3+v2.*C7)./at4,Line.n,Bus.n) + ... sparse(nl,Line.to, -2*(v1.*C3+v2.*C7)./at4,Line.n,Bus.n), ... sparse(nl,Line.from, 2*(3*v4.*C8+v5.*C2+2*Vi3.*g2)./at4,Line.n,Bus.n) + ... sparse(nl,Line.to, 2*(v4.*C2+Vi3.*C8)./at4,Line.n,Bus.n)]; Jji = [sparse(nl,Line.from,-2*(v1.*C6+v3.*C0)./at4,Line.n,Bus.n) + ... sparse(nl,Line.to, 2*(v1.*C6+v3.*C0)./at4,Line.n,Bus.n), ... sparse(nl,Line.from, 2*(v5.*C4+Vj3.*C9)./at4,Line.n,Bus.n) + ... sparse(nl,Line.to, 2*(3*v5.*C9+v4.*C4+2*Vj3.*g2.*at4)./at4,Line.n,Bus.n)]; k1 = 2*mu1./at4; k2 = 2*mu2./at4; D1 = (v1.*(C1-C2)-v2.*C8).*k1; E1 = (v1.*(C5-C4)-v3.*C9).*k2; D2 = (3*v4.*C7 + 2*v5.*C3).*k1; E2 = (3*v5.*C0 + 2*v4.*C6).*k2; D3 = (Vi3.*C7 + 2*v4.*C3).*k1; E3 = (Vj3.*C0 + 2*v5.*C6).*k2; D4 = (3*Vi2.*C8+2*Vij.*C2).*k1; E4 = (3*Vj2.*C9+2*Vij.*C4).*k2; D5 = (Vi2.*C2).*k1; E5 = (Vj2.*C4).*k2; D6 = (6*Vij.*C8+6*Vi2.*g2+Vj2.*C2).*k1; E6 = (6*Vij.*C9+6*Vj2.*g2.*at4+Vi2.*C4).*k2; Hij = [sparse(Line.from, Line.from, D1, Bus.n, Bus.n) + ... sparse(Line.from, Line.to, -D1, Bus.n, Bus.n) + ... sparse(Line.to, Line.from,-D1, Bus.n, Bus.n) + ... sparse(Line.to, Line.to, D1, Bus.n, Bus.n), ... sparse(Line.from, Line.from, D2, Bus.n, Bus.n) + ... sparse(Line.from, Line.to, D3, Bus.n, Bus.n) + ... sparse(Line.to, Line.from,-D2, Bus.n, Bus.n) + ... sparse(Line.to, Line.to, -D3, Bus.n, Bus.n); ... sparse(Line.from, Line.from, D2, Bus.n, Bus.n) + ... sparse(Line.from, Line.to, -D2, Bus.n, Bus.n) + ... sparse(Line.to, Line.from, D3, Bus.n, Bus.n) + ... sparse(Line.to, Line.to, -D3, Bus.n, Bus.n), ... sparse(Line.from, Line.from, D6, Bus.n, Bus.n) + ... sparse(Line.from, Line.to, D4, Bus.n, Bus.n) + ... sparse(Line.to, Line.from, D4, Bus.n, Bus.n) + ... sparse(Line.to, Line.to, D5, Bus.n, Bus.n)]; Hji = [sparse(Line.from, Line.from, E1, Bus.n, Bus.n) + ... sparse(Line.from, Line.to, -E1, Bus.n, Bus.n) + ... sparse(Line.to, Line.from,-E1, Bus.n, Bus.n) + ... sparse(Line.to, Line.to, E1, Bus.n, Bus.n), ... sparse(Line.from, Line.from,-E3, Bus.n, Bus.n) + ... sparse(Line.from, Line.to, -E2, Bus.n, Bus.n) + ...

147
sparse(Line.to, Line.from, E3, Bus.n, Bus.n) + ... sparse(Line.to, Line.to, E2, Bus.n, Bus.n); ... sparse(Line.from, Line.from,-E3, Bus.n, Bus.n) + ... sparse(Line.from, Line.to, E3, Bus.n, Bus.n) + ... sparse(Line.to, Line.from,-E2, Bus.n, Bus.n) + ... sparse(Line.to, Line.to, E2, Bus.n, Bus.n), ... sparse(Line.from, Line.from, E5, Bus.n, Bus.n) + ... sparse(Line.from, Line.to, E4, Bus.n, Bus.n) + ... sparse(Line.to, Line.from, E4, Bus.n, Bus.n) + ... sparse(Line.to, Line.to, E6, Bus.n, Bus.n)]; case 3 % ========================================================================== % AC apparent power flows % ========================================================================== Fij = VV(Line.from).*conj(((VV(Line.from) - tps.*VV(Line.to)).*y + ... VV(Line.from).*(jay*chrg))./(tps.*conj(tps))); Fij = abs(Fij).^2; Fji = VV(Line.to).*conj((VV(Line.to) - VV(Line.from)./tps).*y + ... VV(Line.to).*(jay*chrg)); Fji = abs(Fji).^2; % ========================================================================== % Jacobian & Hessian matrix of tha AC apparent power flows from bus i to bus j % ========================================================================== i = Line.from; j = Line.to; ati = imag(tps); atr = real(tps); cji = cos(DAE.a(j)-DAE.a(i)); sji = sin(DAE.a(j)-DAE.a(i)); vij = DAE.V(i).*DAE.V(j); vi2 = DAE.V(i).*DAE.V(i); vj2 = DAE.V(j).*DAE.V(j); vi2j = DAE.V(j).*vi2; vj2i = DAE.V(i).*vj2; vi3 = vi2.*DAE.V(i); vj3 = vj2.*DAE.V(j); vi3j = vi2.*vij; vj3i = vj2.*vij; g2 = g.^2; b2 = b.^2; gb2 = g2 + b2; at2 = ati.^2+atr.^2; at4 = at2.*at2; bcg = (b+chrg).^2+g2; k1 = g.*ati.*chrg.*sji; k2 = g.*atr.*chrg.*cji; k3 = b.*ati.*chrg.*cji; k4 = b.*atr.*chrg.*sji; k5 = g.*ati.*chrg.*cji; k6 = g.*atr.*chrg.*sji; k7 = b.*ati.*chrg.*sji; k8 = b.*atr.*chrg.*cji; h1 = g2.*ati.*cji; h2 = b2.*ati.*cji; h3 = g2.*atr.*sji; h4 = b2.*atr.*sji; h5 = g2.*ati.*sji; h6 = b2.*ati.*sji; h7 = g2.*atr.*cji; h8 = b2.*atr.*cji;

148
j1 = -k1+h1+h2+k2+k3+h3+k4+h4; j2 = -h5-k5-h6-k6-k7+h7+k8+h8; j3 = -h4-k3-k1-h1+k2-h2-k4-h3; j4 = -h8+k7-k5+h5-k6+h6-k8-h7; Jij = [sparse(nl,Line.from, 2*vi3j.*j3./at4,Line.n,Bus.n) + ... sparse(nl,Line.to, -2*vi3j.*j3./at4,Line.n,Bus.n), ... sparse(nl,Line.from,(6*vi2j.*j4+4*vi3.*bcg+2*vj2i.*at2.*gb2)./at4,Line.n,Bus.n) + ... sparse(nl,Line.to, (2*vi3.*j4+2*vi2j.*at2.*gb2)./at4,Line.n,Bus.n)]; Jji = [sparse(nl,Line.from, -2*vj3i.*j1./at2,Line.n,Bus.n) + ... sparse(nl,Line.to, 2*vj3i.*j1./at2,Line.n,Bus.n), ... sparse(nl,Line.from, (-2*vj3.*j2+2*vj2i.*gb2)./at2,Line.n,Bus.n) + ... sparse(nl,Line.to, (-6*vj2i.*j2+2*vi2j.*gb2)./at2+4*vj3.*bcg,Line.n,Bus.n)]; D1 = -2*mu1.*vi3j.*j4./at4; D2 = 6*mu1.*vi2j.*j3./at4; D3 = 2*mu1.*vi3.*j3./at4; D4 = 2*mu1.*(-3*vi2.*j4+2*vij.*at2.*gb2)./at4; D5 = 2*gb2.*vi2.*mu1./at2; D6 = 2*mu1.*(-6*vij.*j4+6*vi2.*bcg+vj2.*at2.*gb2)./at4; Hij = [sparse(Line.from, Line.from, D1, Bus.n, Bus.n) + ... sparse(Line.from, Line.to, -D1, Bus.n, Bus.n) + ... sparse(Line.to, Line.from,-D1, Bus.n, Bus.n) + ... sparse(Line.to, Line.to, D1, Bus.n, Bus.n), ... sparse(Line.from, Line.from, D2, Bus.n, Bus.n) + ... sparse(Line.from, Line.to, D3, Bus.n, Bus.n) + ... sparse(Line.to, Line.from,-D2, Bus.n, Bus.n) + ... sparse(Line.to, Line.to, -D3, Bus.n, Bus.n); ... sparse(Line.from, Line.from, D2, Bus.n, Bus.n) + ... sparse(Line.from, Line.to, -D2, Bus.n, Bus.n) + ... sparse(Line.to, Line.from, D3, Bus.n, Bus.n) + ... sparse(Line.to, Line.to, -D3, Bus.n, Bus.n), ... sparse(Line.from, Line.from, D6, Bus.n, Bus.n) + ... sparse(Line.from, Line.to, D4, Bus.n, Bus.n) + ... sparse(Line.to, Line.from, D4, Bus.n, Bus.n) + ... sparse(Line.to, Line.to, D5, Bus.n, Bus.n)]; E1 = 2*mu2.*vj3i.*j2./at2; E2 = -2*mu2.*vj3.*j1./at2; E3 = -6*mu2.*vj2i.*j1./at2; E4 = -2*mu2.*(3*vj2.*j2-2*vij.*gb2)./at2; E6 = 2*mu2.*(-6*vij.*j2+vi2.*gb2)./at2 + 6*vj2.*bcg; E5 = 2*mu2.*vj2.*gb2./at2;

149
Hji = [sparse(Line.from, Line.from, E1, Bus.n, Bus.n) + ... sparse(Line.from, Line.to, -E1, Bus.n, Bus.n) + ... sparse(Line.to, Line.from,-E1, Bus.n, Bus.n) + ... sparse(Line.to, Line.to, E1, Bus.n, Bus.n), ... sparse(Line.from, Line.from, E2, Bus.n, Bus.n) + ... sparse(Line.from, Line.to, E3, Bus.n, Bus.n) + ... sparse(Line.to, Line.from,-E2, Bus.n, Bus.n) + ... sparse(Line.to, Line.to, -E3, Bus.n, Bus.n); ... sparse(Line.from, Line.from, E2, Bus.n, Bus.n) + ... sparse(Line.from, Line.to, -E2, Bus.n, Bus.n) + ... sparse(Line.to, Line.from, E3, Bus.n, Bus.n) + ... sparse(Line.to, Line.to, -E3, Bus.n, Bus.n), ... sparse(Line.from, Line.from, E5, Bus.n, Bus.n) + ... sparse(Line.from, Line.to, E4, Bus.n, Bus.n) + ... sparse(Line.to, Line.from, E4, Bus.n, Bus.n) + ... sparse(Line.to, Line.to, E6, Bus.n, Bus.n)]; E.2 This Program Calculates the Eigenvalue and Participation Factors Author…………………………………………….:Engr. F.O. Enemuoh *Registration Number………….:PG/Ph.D/03/35105 *Project Supervisor…………….:Ven. Engr. Prof. T. C. Madueme *Project Title………………………….: Simulation Modelling of Voltage Stability of 330kV,30Bus Interconnected Power System Network. function fm_eigen(type) % FM_EIGEN compute eigenvalues of static and dynamic Jacobian % matrices % % FM_EIGEN(TYPE,REPORT) % TYPE 1 -> Jlfd eigenvalues % 2 -> Jlfv eigenvalues % 3 -> Jlf eigenvalues % 4 -> As eigenvalues % REPORT 1 -> create report file % 0 -> no report file % % global DAE Bus Settings Varname File Path global Snapshot PV SW Fig Theme SSSA %if isempty(Snapshot), return, end switch type case 'matrix' % set matrix type mat = zeros(4,1); mat(1) = findobj(gcf,'Tag','Checkbox1'); mat(2) = findobj(gcf,'Tag','Checkbox2'); mat(3) = findobj(gcf,'Tag','Checkbox3'); mat(4) = findobj(gcf,'Tag','Checkbox4'); tplot = zeros(3,1); tplot(1) = findobj(gcf,'Tag','Radiobutton1'); tplot(2) = findobj(gcf,'Tag','Radiobutton2'); tplot(3) = findobj(gcf,'Tag','Radiobutton3');

150
ca = find(mat == gcbo); vals = zeros(4,1); vals(ca) = 1; for i = 1:4 set(mat(i),'Value',vals(i)) end a = get(tplot(3),'Value'); if ca == 4 set(tplot(3),'Enable','on') else if a set(tplot(3),'Value',0) set(tplot(1),'Value',1) SSSA.map = 1; end set(tplot(3),'Enable','off') end if ca == 4 & SSSA.neig > DAE.n-1, set(findobj(Fig.eigen,'Tag','EditText1'),'String','1') SSSA.neig = 1; elseif ca < 4 & SSSA.neig > Bus.n-1, set(findobj(Fig.eigen,'Tag','EditText1'),'String','1') SSSA.neig = 1; end SSSA.matrix = ca; SSSA.report = []; case 'map' % set eigenvalue map type tplot = zeros(3,1); tplot(1) = findobj(gcf,'Tag','Radiobutton1'); tplot(2) = findobj(gcf,'Tag','Radiobutton2'); tplot(3) = findobj(gcf,'Tag','Radiobutton3'); ca = find(tplot == gcbo); vals = zeros(3,1); vals(ca) = 1; for i = 1:3 set(tplot(i),'Value',vals(i)) end SSSA.map = find(vals); SSSA.report = []; case 'neig' % Set number of eigs to be computed if SSSA.matrix == 4 amax = DAE.n; else amax = Bus.n; end number = get(gcbo,'String'); try a = round(str2num(number)); if a > 0 & a < amax SSSA.neig = a;

151
SSSA.report = []; else set(gcbo,'String',num2str(SSSA.neig)); end catch set(gcbo,'String',num2str(SSSA.neig)); end case 'method' % Set method for eigenvalue computation t1 = findobj(Fig.eigen,'Tag','Radiobutton1'); t3 = findobj(Fig.eigen,'Tag','Radiobutton2'); a = get(gcbo,'Value'); hedit = findobj(Fig.eigen,'Tag','EditText1'); if a == 1 set(hedit,'Enable','off') set(t3,'Enable','on') else set(hedit,'Enable','on') if get(t3,'Value') set(t3,'Value',0) set(t1,'Value',1) SSSA.map = 1; end set(t3,'Enable','off') end SSSA.method = a; SSSA.report = []; case 'runsssa' % check for data file if isempty(File.data) fm_disp('Set a data file before running eigenvalue analysis.',2) return end % check for initial power flow solution if ~Settings.init fm_disp('Solve base case power flow...') Settings.show = 0; fm_set('lf') Settings.show = 1; if ~Settings.init, return, end end meth = {'LM';'SM';'LR';'SR';'LI';'SI'}; neig = SSSA.neig; if Settings.octave opts = 0; if SSSA.method-1 fm_disp(['Only full eigenvalue analysis is supported on ' ... 'Octave']) end

152
else opts = SSSA.method-1; end uno = 0; tipo_mat = SSSA.matrix; tipo_plot = SSSA.map; opt.disp = 0; SSSA.report = []; pf = []; if isempty(Bus.n) fm_disp('No loaded system. Eigenvalue computation cannot be run.',2) return end % build eigenvalu names if (Settings.vs == 0), fm_idx(3), end % initialize report structures Header{1,1}{1,1} = 'EIGENVALUE REPORT'; Header{1,1}{2,1} = ' '; Header{1,1}{3,1} = ['P S A T ',Settings.version]; Header{1,1}{4,1} = ' '; Header{1,1}{5,1} = 'Author: Federico Milano, (c) 2002-2004'; Header{1,1}{6,1} = 'e-mail: [email protected]'; Header{1,1}{7,1} = 'website: http://thunderbox.uwaterloo.ca/~fmilano'; Header{1,1}{8,1} = ' '; Header{1,1}{9,1} = ['File: ', Path.data,strrep(File.data,'(mdl)','.mdl')]; Header{1,1}{10,1} = ['Date: ',datestr(now,0)]; Matrix{1,1} = []; Cols{1,1} = ''; Rows{1,1} = ''; if tipo_mat == 4 if DAE.n == 0 fm_disp('No dynamic component loaded. State matrix is not defined',2) return end Fy = DAE.Fy; Gx = DAE.Gx; a = [PV.bus; SW.bus]; b2 = 1:Bus.n; c = []; for i = 1:length(a) c = [c; find(b2 == a(i))]; end if ~isempty(c) b2(c) = [];

153
end a = [SW.bus]; b1 = 1:Bus.n; c = []; for i = 1:length(a) c = [c; find(b1 == a(i))]; end if ~isempty(c) b1(c) = []; end b = [b1, b2+Bus.n]; if Settings.octave As = DAE.Fx - Fy(:,b)*([DAE.Jlfv(b,b)-1e-6*eye(length(b))]\ ... Gx(b,:)); else As = DAE.Fx - Fy(:,b)*([DAE.Jlfv(b,b)-1e-6*speye(length(b))]\ ... Gx(b,:)); end if tipo_plot == 3 if Settings.octave As = (As+8*speye(DAE.n))/(As-8*eye(DAE.n)); else As = (As+8*speye(DAE.n))/(As-8*speye(DAE.n)); end end if opts auto = eigs(As,neig,meth{opts},opt); else [V, auto] = eig(full(As)); auto = diag(auto); end auto = round(auto/Settings.lftol)*Settings.lftol; num_auto = length(auto); autor = real(auto); autoi = imag(auto); for i = 1:num_auto; names{i,1} = strrep(Varname.uautostate{i},'_As',' As '); names{i,1} = strrep(names{i,1},'eigenvalue','Eig'); end if ~opts W = inv(V); WtV = sum(abs(W').*abs(V)); pf = abs(W).*abs(V'); for i = 1:length(auto), pf(i,:) = pf(i,:)/WtV(i); end end Header{2,1} = 'STATE MATRIX EIGENVALUES'; Cols{2,1} = {'Eigevalue', 'Most Associated States', ... 'Real part','Imag. Part','Frequency'}; Matrix{2,1} = zeros(num_auto,3); Matrix{2,1}(:,[1 2]) = [autor, autoi]; for i = 1:num_auto; if imag(auto(i)) == 0 & ~opts [part, idxs] = max(pf(i,:));

154
stat = Varname.ux{idxs}; frec = 0; elseif ~opts [part, idxs] = sort(pf(i,:)); stat = [Varname.ux{idxs(end)},', ',Varname.ux{idxs(end-1)}]; frec = abs(imag(auto(i))/2/3.1416); else stat = '---'; frec = 0; end Rows{2,1}{i,1} = names{i}; Rows{2,1}{i,2} = stat; Matrix{2,1}(i,3) = frec; end if ~opts uno = fix(DAE.n/5); due = rem(DAE.n,5); if due > 0, uno = uno + 1; end for k = 1:uno Header{2+k,1} = 'PARTECIPATION FACTORS (Euclidean norm)'; Cols{2+k} = {' ',Varname.ux{5*(k-1)+1:min(5*k,DAE.n)}}; Rows{2+k} = names; Matrix{2+k,1} = pf(:,5*(k-1)+1:min(5*k,DAE.n)); end end elseif tipo_mat == 3 Jlf = DAE.Jlf; Jlf(SW.bus,:) = 0; Jlf(SW.bus+Bus.n,:) = 0; Jlf(:,SW.bus) = 0; Jlf(:,SW.bus+Bus.n) = 0; if Settings.octave Jlf(SW.bus,SW.bus) = Jlf(SW.bus,SW.bus) + eye(SW.n); Jlf(SW.bus+Bus.n,SW.bus+Bus.n) = Jlf(SW.bus+Bus.n,SW.bus+Bus.n) ... + 999*eye(SW.n); else Jlf(SW.bus,SW.bus) = Jlf(SW.bus,SW.bus) + speye(SW.n); Jlf(SW.bus+Bus.n,SW.bus+Bus.n) = Jlf(SW.bus+Bus.n,SW.bus+Bus.n) ... + 999*speye(SW.n); end Jlf(PV.bus+Bus.n,:) = 0; Jlf(:,PV.bus+Bus.n) = 0; if Settings.octave Jlf(PV.bus+Bus.n,PV.bus+Bus.n) = Jlf(PV.bus+Bus.n,PV.bus+Bus.n) ... + 999*eye(PV.n); else Jlf(PV.bus+Bus.n,PV.bus+Bus.n) = Jlf(PV.bus+Bus.n,PV.bus+Bus.n) ... + 999*speye(PV.n); end Jlfptheta = Jlf(1:Bus.n,1:Bus.n)+diag(Bus.n)*1e-5;

155
elementinulli = find(diag(Jlfptheta == 0)); if ~isempty(elementinulli) for i = 1:length(elementinulli) Jlfptheta(elementinulli(i),elementinulli(i)) = 1; end end Jlfr = (Jlf(Bus.n+1:2*Bus.n,Bus.n+1:2*Bus.n) - ... Jlf(Bus.n+1:2*Bus.n, 1:Bus.n)*... (Jlfptheta\Jlf(1:Bus.n,Bus.n+1:2*Bus.n))); if opts auto = eigs(Jlfr,neig,meth{opts},opt); else [V, auto] = eig(full(Jlfr)); auto = diag(auto); end auto = round(auto/Settings.lftol)*Settings.lftol; num_auto = length(auto); autor = real(auto); autoi = imag(auto); for i = 1:num_auto names{i,1} = strrep(Varname.uautojlfr{i},'_Jlfr',' Jlf'); names{i,1} = strrep(names{i,1},'eigenvalue','Eig'); end if ~opts W = inv(V); WtV = sum(abs(W').*abs(V)); pf = abs(W).*abs(V'); for i = 1:length(auto) pf(i,:) = pf(i,:)/WtV(i); end end Header{2,1} = 'EIGENVALUES OF THE STANDARD POWER JACOBIAN MATRIX'; Cols{2,1} = {'Eigevalue', 'Real part', ... 'Imaginary Part'}; Rows{2,1} = names; Matrix{2,1} = [autor, autoi]; if ~opts uno = fix(Bus.n/5); due = rem(Bus.n,5); if due > 0, uno = uno + 1; end for k = 1:uno Header{2+k,1} = 'PARTECIPATION FACTORS (Euclidean norm)'; Cols{2+k} = {' ',Varname.bus{5*(k-1)+1:min(5*k,Bus.n)}}; Rows{2+k} = names; Matrix{2+k,1} = pf(:,5*(k-1)+1:min(5*k,Bus.n)); end end elseif tipo_mat == 2 Jlfvr = (DAE.Jlfv(Bus.n+1:2*Bus.n,Bus.n+1:2*Bus.n) ... - DAE.Jlfv(Bus.n+1:2*Bus.n, 1:Bus.n)*... (DAE.Jlfv(1:Bus.n,1:Bus.n)\DAE.Jlfv(1:Bus.n,Bus.n+1:2* ... Bus.n)));

156
if Settings.octave Jlfvr(SW.bus,SW.bus) = Jlfvr(SW.bus,SW.bus) + 998* ... eye(SW.n); Jlfvr(PV.bus,PV.bus) = Jlfvr(PV.bus,PV.bus) + 998* ... eye(PV.n); else Jlfvr(SW.bus,SW.bus) = Jlfvr(SW.bus,SW.bus) + 998* ... speye(SW.n); Jlfvr(PV.bus,PV.bus) = Jlfvr(PV.bus,PV.bus) + 998* ... speye(PV.n); end if opts auto = eigs(Jlfvr,neig,meth{opts},opt); else [V, auto] = eig(full(Jlfvr)); auto = diag(auto); end auto = round(auto/Settings.lftol)*Settings.lftol; num_auto = length(auto); autor = real(auto); autoi = imag(auto); %if report for i = 1:num_auto names{i,1} = strrep(Varname.uautojlfr{i},'_Jlfr',' Jlfv'); names{i,1} = strrep(names{i,1},'eigenvalue','Eig'); end if ~opts W = inv(V); WtV = sum(abs(W').*abs(V)); pf = abs(W).*abs(V'); for i = 1:length(auto), pf(i,:) = pf(i,:)/WtV(i); end %pf = abs(vect'.*(inv(vect'))'); end Header{2,1} = 'EIGENVALUES OF THE COMPLETE POWER JACOBIAN MATRIX'; Cols{2,1} = {'Eigevalue', 'Real part', ... 'Imaginary Part'}; Rows{2,1} = names; Matrix{2,1} = [autor, autoi]; if ~opts uno = fix(Bus.n/5); due = rem(Bus.n,5); if due > 0, uno = uno + 1; end for k = 1:uno Header{2+k,1} = 'PARTECIPATION FACTORS (Euclidean norm)'; Cols{2+k} = {' ',Varname.bus{5*(k-1)+1:min(5*k,Bus.n)}}; Rows{2+k} = names; Matrix{2+k,1} = pf(:,5*(k-1)+1:min(5*k,Bus.n)); end end elseif tipo_mat == 1 if DAE.n == 0 fm_disp('Since no dynamic component is loaded, Jlfd = Jlfv.',2)

157
DAE.Jlfd = DAE.Jlfv; else Fx_mod = DAE.Fx+diag(-1e-5*ones(DAE.n,1)); DAE.Jlfd = (DAE.Jlfv - DAE.Gx*(Fx_mod\DAE.Fy)); end Jlfdr = (DAE.Jlfd(Bus.n+1:2*Bus.n,Bus.n+1:2*Bus.n) ... - DAE.Jlfd(Bus.n+1:2*Bus.n, 1:Bus.n)*... (DAE.Jlfd(1:Bus.n,1:Bus.n)\DAE.Jlfd(1:Bus.n,Bus.n+1:2* ... Bus.n))); if Settings.octave Jlfdr(SW.bus,SW.bus) = Jlfdr(SW.bus,SW.bus) + 998* ... eye(SW.n); Jlfdr(PV.bus,PV.bus) = Jlfdr(PV.bus,PV.bus) + 998* ... eye(PV.n); else Jlfdr(SW.bus,SW.bus) = Jlfdr(SW.bus,SW.bus) + 998* ... speye(SW.n); Jlfdr(PV.bus,PV.bus) = Jlfdr(PV.bus,PV.bus) + 998* ... speye(PV.n); end if opts auto = eigs(Jlfdr,neig,meth{opts},opt); else [V, auto] = eig(full(Jlfdr)); auto = diag(auto); end auto = round(auto/Settings.lftol)*Settings.lftol; num_auto = length(auto); autor = real(auto); autoi = imag(auto); for i = 1:num_auto names{i,1} = strrep(Varname.uautojlfr{i},'_Jlfr',' Jlfd'); names{i,1} = strrep(names{i,1},'eigenvalue','Eig'); end if ~opts W = inv(V); WtV = sum(abs(W').*abs(V)); pf = abs(W).*abs(V'); for i = 1:length(auto), pf(i,:) = pf(i,:)/WtV(i); end end Header{2,1} = 'EIGENVALUES OF THE DYNAMIC POWER JACOBIAN MATRIX'; Cols{2,1} = {'Eigevalue', 'Real part', ... 'Imaginary Part'}; Rows{2,1} = names; Matrix{2,1} = [autor, autoi]; if ~opts uno = fix(Bus.n/5); due = rem(Bus.n,5); if due > 0, uno = uno + 1; end for k = 1:uno Header{2+k,1} = 'PARTECIPATION FACTORS (Euclidean norm)'; Cols{2+k} = {' ',Varname.bus{5*(k-1)+1:min(5*k,Bus.n)}}; Rows{2+k} = names;

158
Matrix{2+k,1} = pf(:,5*(k-1)+1:min(5*k,Bus.n)); end end end auto_neg = find(autor < 0); auto_pos = find(autor > 0); auto_real = find(autoi == 0); auto_comp = find(autoi < 0); auto_zero = find(autor == 0); num_neg = length(auto_neg); num_pos = length(auto_pos); num_real = length(auto_real); num_comp=length(auto_comp); num_zero = length(auto_zero); if Fig.eigen hdl = zeros(8,1); hdl(1) = findobj(Fig.eigen,'Tag','Text3'); hdl(2) = findobj(Fig.eigen,'Tag','Text4'); hdl(3) = findobj(Fig.eigen,'Tag','Text5'); hdl(4) = findobj(Fig.eigen,'Tag','Text6'); hdl(5) = findobj(Fig.eigen,'Tag','Axes1'); hdl(6) = findobj(Fig.eigen,'Tag','Listbox1'); hdl(7) = findobj(Fig.eigen,'Tag','Text1'); hdl(8) = findobj(Fig.eigen,'Tag','Text2'); set(hdl(1),'String',num2str(num_pos)); set(hdl(2),'String',num2str(num_neg)); set(hdl(3),'String',num2str(num_comp)); set(hdl(4),'String',num2str(num_zero)); set(hdl(7),'String',num2str(DAE.n)); set(hdl(8),'String',num2str(Bus.n)); autovalori = cell(length(autor),1); if num_auto < 10 d = ''; e = ''; elseif num_auto < 100 d = ' '; e = ''; elseif num_auto < 1000 d = ' '; e = ' '; end for i = 1:length(autor) if autor(i)>=0 a = ' '; else a = ''; end if autoi(i)>=0

159
c = '+'; else c = '-'; end if i < 10 f1 = [d,e]; elseif i < 100 f1 = e; else f1 = ''; end if tipo_plot == 3 autovalori{i,1} = ['|',char(181),'(A)| #',num2str(i), ... f1, ' ', fvar(abs(auto(i)),9)]; else autovalori{i,1} = [char(181),'(A) #',num2str(i),f1, ... ' ',a,num2str(autor(i)),' ',c, ... ' j',num2str(abs(autoi(i)))]; end end set(hdl(6),'String',autovalori,'Value',1) end Header{3+uno,1} = 'STATISTICS'; Cols{3+uno} = ''; Rows{3+uno} = ''; Matrix{3+uno,1} = []; if tipo_mat < 4 Rows{3+uno}{1,1} = 'NUMBER OF BUSES'; Matrix{3+uno,1}(1,1) = Bus.n; else Rows{3+uno}{1,1} = 'DYNAMIC ORDER'; Matrix{3+uno,1}(1,1) = DAE.n; end Rows{3+uno}{2,1} = '# OF EIGS WITH Re(mu) < 0'; Matrix{3+uno,1}(2,1) = num_neg; Rows{3+uno}{3,1} = '# OF EIGS WITH Re(mu) > 0'; Matrix{3+uno,1}(3,1) = num_pos; Rows{3+uno}{4,1} = '# OF REAL EIGS'; Matrix{3+uno,1}(4,1) = num_real; Rows{3+uno}{5,1} = '# OF COMPLEX PAIRS'; Matrix{3+uno,1}(5,1) = num_comp; Rows{3+uno}{6,1} = '# OF ZERO EIGS'; Matrix{3+uno,1}(6,1) = num_zero; % save eigenvalues and participation factors in SSSA structure SSSA.eigs = auto; SSSA.pf = pf; axes(hdl(5)); fm_eigen('graph') SSSA.report.Matrix = Matrix; SSSA.report.Header = Header; SSSA.report.Cols = Cols;

160
SSSA.report.Rows = Rows; case 'report' if SSSA.matrix == 4 & DAE.n == 0 fm_disp('No dynamic component loaded. State matrix is not defined',2) return end if isempty(SSSA.report) fm_eigen('runsssa') end % writing data... filename = [fm_filenum(Settings.export),['.',Settings.export]]; switch Settings.export case 'txt' fm_writetxt(SSSA.report.Matrix,SSSA.report.Header, ... SSSA.report.Cols,SSSA.report.Rows,filename) case 'xls' fm_writexls(SSSA.report.Matrix,SSSA.report.Header, ... SSSA.report.Cols,SSSA.report.Rows,filename) case 'tex' fm_writetex(SSSA.report.Matrix,SSSA.report.Header, ... SSSA.report.Cols,SSSA.report.Rows,filename) end case 'graph' hgca = gca; if isempty(SSSA.eigs) fm_eigen('runsssa') end axes(hgca) autor = real(SSSA.eigs); autoi = imag(SSSA.eigs); if Fig.eigen switch SSSA.map case 1 idxn = find(autor < 0); idxz = find(autor == 0); idxp = find(autor > 0); if SSSA.matrix == 4 hdle = plot(autor(idxn), autoi(idxn),'bx', ... autor(idxz), autoi(idxz),'go', ... autor(idxp), autoi(idxp),'rx'); else hdle = plot(autor(idxn), autoi(idxn),'rx', ... autor(idxz), autoi(idxz),'go', ... autor(idxp), autoi(idxp),'bx'); end

161
hold on plot([0,0],ylim,':k'); plot(xlim,[0,0],':k'); set(hdle,'MarkerSize',8); xlabel('Real'); ylabel('Imag'); hold off set(hgca,'Tag','Axes1') case 2 surf(real(SSSA.pf)) set(hgca,'XLim',[1 num_auto],'YLim',[1 num_auto]); view(0,90); box('on') ylabel('Eigenvalues'); if SSSA.matrix == 4 xlabel('State Variables'); else xlabel('Buses'); end shading('interp') colormap('summer'); title('Participation Factors') set(hgca,'Tag','Axes1'); case 3 t = 0:0.01:2*pi+0.01; x = cos(t); y = sin(t); plot(x,y,'k:') hold on idxn = find(autor < 1); idxz = find(autor == 1); idxp = find(autor > 1); hdle = plot(autor(idxn), autoi(idxn),'bx', ... autor(idxz), autoi(idxz),'go', ... autor(idxp), autoi(idxp),'rx'); set(hdle,'MarkerSize',8); xlabel('Real'); ylabel('Imag'); xlim(1.1*xlim); ylim(1.1*ylim); plot([0,0],1.1*ylim,':k'); plot(1.1*xlim,[0,0],':k'); hold off set(hgca,'Tag','Axes1'); end set(hgca,'Color',Theme.color11) end end

162
Appendix E
TABLE 5.6 NODES RESULTS PHCN 2004 BUS MODEL
S/N ID Location Bus No.
Node Type
Rating (Kv)
Loading %(V)
Gen MW
Gen MVAR
1. 61 Sapele 1. Slack 330 100 2064.678 104.808 2. 49 Jebba 2. PV 330 100 90.000 159.946 3. 93 Shiroro 3. PV 330 100 150.000 304.175 4. 140 Egbin 4. PV 330 100 220.000 694.338 5. 73 Afam 5. PV 330 100 72.000 698.532 6. 16 Kainji 6. PV 330 100 230.000 81.869 7. 81 Delta 7. PV 330 100 70.000 3.174 8. 20 Jebba 8. PG 330 99.97 0 0 9. 144 Shiroro 9. PG 330 99.95 0 0 10. 136 Egbin 10. PG 330 99.68 0 0 11. 12 Birnin Kebbi 11. PG 330 99.08 0 0 12. 24 Osogbo 12. PG 330 99.28 0 0 13. 28 Ibadan 13. PG 330 99.02 0 0 14. 33 Ikeja 14. PG 330 99.30 0 0 15. 41 Akangba 15. PG 330 99.28 0 0 16. 37 Aja 16. PG 330 99.64 0 0 17. 152 Kaduna 17. PG 330 99.57 0 0 18. 148 Kano 18. PG 330 99.02 0 0 19. 45 Jos 19. PG 330 93.59 0 0 20. 53 Gombe 20. PG 330 91.76 0 0 21. 85 Benin 21. PG 330 99.49 0 0 22. 89 Ajaokuta 22. PG 330 99.39 0 0 23. 69 Onitsha 23. PG 330 98.89 0 0 24. 65 Aba 24. PG 330 99.48 0 0 25. 57 Aladja 25. PG 330 99.99 0 0 26. 77 Enugu 26. PG 330 98.58 0 0 27. 175397 Sokoto 27. PG 330 98.96 0 0 28. 175463 Maiduguri 28. PG 330 91.06 0 0 29. 175475 Makurdi 29. PG 330 96.01 0 0 30. 175427 Abuja 30. PG 330 99.39 0 0

163
Appendix F Table 5.7 Element Results of Loadflow of PHCN 330kV, 30Bus System
ID Node Element Type P Q I Angle Name name MW MVAR KA o 1 557 BUS 1 (Sapele) L01-21 Line 2114.673 93.134 3.703 -2.5 2 661 BUS 1 (Sapele) L01-25 Line -18.252 7.542 0.035 -157.5 3 669 BUS 1 (Sapele) L01-07 Line -31.743 4.132 0.056 172.6 4 137202 BUS 1 (Sapele) GEN 1 Synchronous -2064.678 -104.808 3.617 177.1 5 605 BUS 10 ( Egbin T.S.) L10-14 Line 1.386 392.302 0.689 -94.4 6 621 BUS 10 ( Egbin T.S.) L10-16 Line 95.043 71.244 0.208 -41.5 7 629 BUS 10 ( Egbin T.S.) L10-15 Line 43.274 168.741 0.306 -80.2 8 685 BUS 10 ( Egbin T.S.) L04-10 Line -219.703 -692.287 1.275 103 9 213 BUS 10 ( Egbin T.S.) Load 10 Load 80 60 0.176 -41.5 10 182 BUS11(Birnin-Kabbi) Load 11 Load 56.4 42.3 0.124 -43 11 373 BUS11(Birnin-Kabbi) L06-11 Line -112.815 -84.688 0.249 137 12 175409 BUS11(Birnin-Kabbi) L11-27 Line 56.415 42.388 0.125 -43 13 175820 BUS 12(Oshogbo) L12-21 Line -633.832 69.456 1.124 -178.3 14 405 BUS 12(Oshogbo) L08-12 Line 417.111 -204.296 0.819 21.6 15 493 BUS 12(Oshogbo) L12-13 Line 56.954 31.232 0.114 -33.3 16 501 BUS 12(Oshogbo) L12-14 Line 14.867 -5.072 0.028 14.3 17 779 BUS 12(Oshogbo) Load 12 Load 144.9 108.68 0.319 41.4 18 201 BUS 13(Ibadan) Load 13 Load 133 97.5 0.291 41 19 493 BUS 13(Ibadan) L12-13 Line -56.918 -30.982 0.114 146.7 20 509 BUS 13(Ibadan) L13-14 Line -76.082 -66.716 0.179 134.1 21 605 BUS 14(Ikeja West) L10-14 Line -1.2 -390.828 0.689 85.6 22 645 BUS 14(Ikeja West) L14-15 Line 184.841 3.013 0.326 -5.5 23 207 BUS 14(Ikeja West) Load 14 Load 332 249 0.731 -41.5 24 501 BUS 14(Ikeja West) L12-14 Line -14.865 4.789 0.028 -166.7 25 509 BUS 14(Ikeja West) L13-14 Line 76.13 66.716 0.178 -45.8 26 517 BUS 14(Ikeja West) L14-21 Line -576.906 67.31 1.023 -177.9 27 629 BUS 15(Akangba) L10-15 Line -43.182 -168.141 0.306 99.7 28 645 BUS 15(Akangba) L14-15 Line -184.818 -2.859 0.326 174.5 29 292 BUS 15(Akangba) Load 15 Load 228 171 0.502 -41.5 30 621 BUS 16(Aja) L10-16 Line -95 -71.25 0.209 138.5 31 286 BUS 16(Aja) Load 16 Load 95 71.25 0.209 -41.5 32 445 BUS 17(Kaduna) L09-17 Line -520.193 -60.932 0.92 164.2 33 461 BUS 17(Kaduna) L17-18 Line 130.193 61.183 0.253 -34.3 34 469 BUS 17(Kaduna) L17-19 Line 0 -0.251 0 80.9 35 340 BUS 17(Kaduna) Load 17 Load 390 0 0.685 -9.1 36 461 BUS 18(Kano) L17-18 Line -130 -60 0.253 145.6 37 764 BUS 18(Kano) Load 18 Load 130 60 0.253 -34.4 38 429 BUS 19(Jos) L19-29 Line -278.936 -216.273 0.66 133.4 39 469 BUS 19(Jos) L17-19 Line 0 0 0 90

164
ID Node Element Type P Q I Angle Name name MW Mvar Ka O 40 477 BUS 19(Jos) L19-20 Line 213.936 167.523 0.508 -46.8 41 364 BUS 19(Jos) Load19 Load 65 48.75 0.152 -45.6 42 176 BUS 2(Jebba G.S.) GEN 2 Synchronous -90 -159.946 0.321 113.7 43 485 BUS 2(Jebba G.S.) L02-08 Line 90 159.946 0.321 -66.3 44 413 BUS 20(Gombe) L20-28 Line 80.142 60.759 0.192 -47.1 45 477 BUS 20(Gombe) L19-20 Line -212.942 -160.359 0.508 133.1 46 370 BUS 20(Gombe) Load 20 Load 132.8 99.6 0.317 -46.8 47 557 BUS 21(Benin) L01-21 Line -2105.802 -26.975 3.703 177.5 48 573 BUS 21(Benin) L21-23 Line 743.094 -2.49 1.307 -1.6 49 175820 BUS 21(Benin) L12-21 Line 637.834 -39.315 1.124 1.7 50 322 BUS 21(Benin) Load 21 Load 124.2 93.3 0.273 -38.7 51 517 BUS 21(Benin) L14-21 Line 580.67 -39.319 1.023 2.1 52 541 BUS 21(Benin) L21-22 Line 20.005 14.799 0.044 -38.3 53 175351 BUS 22(Ajaokuta) Load 22 Load 20 15 0.044 -38.7 54 541 BUS 22(Ajaokuta) L21-22 Line -20 -15 0.044 141.3 55 573 BUS 23(Onitsha) L21-23 Line -737.091 47.592 1.307 178.4 56 589 BUS 23(Onitsha) L23-24 Line 243.203 -172.861 0.528 30.1 57 316 BUS 23(Onitsha) Load 23 Load 86 64.5 0.19 -42.2 58 732 BUS 23(Onitsha) L23-26 Line 407.888 60.769 0.73 -13.8 59 589 BUS 24(Aba) L23-24 Line -242.719 176.382 0.528 -149.9 60 597 BUS 24(Aba) L05-24 Line -71.517 -694.923 1.229 89.9 61 453 BUS 24(Aba) L24-26 Line 49.436 320.541 0.57 -87.2 62 310 BUS 24(Aba) Load 24 Load 264.8 198 0.582 -42.7 63 661 BUS 25(Aladja) L01-25 Line 18.253 -7.614 0.035 22.7 64 677 BUS 25(Aladja) L07-25 Line -38.253 -7.386 0.068 169.1 65 298 BUS 25(Aladja) Load 25 Load 20 15 0.044 -36.8 66 549 BUS 26(Enugu) L26-29 Line 366.309 306.414 0.848 -45.8 67 453 BUS 26(Enugu) L24-26 Line -49.051 -317.761 0.571 92.8 68 732 BUS 26(Enugu) L23-26 Line -407.258 -56.152 0.73 166.2 69 304 BUS 26(Enugu) Load 26 Load 90 67.5 0.2 -42.8 70 175409 BUS 27(Sokoto) L11-27 Line -56.4 -42.3 0.125 137 71 175420 BUS 27(Sokoto) Load 27 Load 56.4 42.3 0.125 -43 72 175506 BUS 28(Maiduguri) Load 28 Load 80 60 0.192 -47.2 73 413 BUS 28(Maiduguri) L20-28 Line -80 -60 0.192 132.8 74 549 BUS 29(Makurdi) L26-29 Line -364.06 -289.767 0.848 134.1 75 175482 BUS 29(Makurdi) Load 29 Load 83.45 61.22 0.189 -43.6 76 429 BUS 29(Makurdi) L19- 29 Line 280.61 228.547 0.659 -46.5 77 437 BUS 3(Shiroro G.S.) L03-09 Line 150 304.175 0.593 -72 78 347 BUS 3(Shiroro G.S.) GEN 3 Synchronous -150 -304.175 0.593 108 79 829 BUS 30(Abuja) L09-30 Line -130 -60 0.252 146.4 80 175457 BUS 30(Abuja) Load 30 Load 130 60 0.252 -33.6 81 685 BUS 4(Egbin G.S.) L04-10 Line 220 694.338 1.274 -77 82 245 BUS 4(Egbin G.S.) GEN 4 Synchronous -220 -694.338 1.274 103

165
ID Node Element Type P Q I Angle Name name MW Mvar kA O 83 823 BUS5(Afam) GEN 5 Synchronous -72 -698.532 1.229 89.9 84 597 BUS5(Afam) L05-24 Line 72 698.532 1.229 -90.1 85 373 BUS6(Kainji) L06-11 Line 113.062 86.162 0.249 -42.9 86 389 BUS6(Kainji) L06-08 Line 116.938 -4.293 0.205 -3.5 87 160 BUS6(Kainji) GEN 6 Synchronous -230 -81.869 0.427 154.8 88 669 BUS 7(Delta) L01-07 Line 31.746 -4.193 0.056 7.6 89 677 BUS 7(Delta) L07-25 Line 38.254 7.367 0.068 -10.9 90 252 BUS 7(Delta) GEN 7 Synchronous -70 -3.174 0.123 177.4 91 389 BUS 8(Jebba T.S.) L06-08 Line -116.896 4.521 0.205 176.5 92 405 BUS 8(Jebba T.S.) L08-12 Line -415.732 214.137 0.818 -158.5 93 421 BUS 8(Jebba T.S.) L08-09 Line 614.722 -64.685 1.082 0.3 94 485 BUS 8(Jebba T.S.) L02-08 Line -89.994 -159.903 0.321 113.6 95 773 BUS 8(Jebba T.S.) Load 8 Load 7.9 5.93 0.017 -42.6 96 829 BUS 9(Shiroro T.S.) L09-30 Line 130.199 61.196 0.252 -33.5 97 421 BUS 9(Shiroro T.S.) L08-09 Line -611.06 91.952 1.082 -179.7 98 334 BUS9(Shiroro T.S.) Load 9 Load 109.6 82.2 0.24 -45.2 99 437 BUS9(Shiroro T.S.) L03-09 Line -149.978 -304.013 0.593 108 100 445 BUS9(Shiroro T.S.) L09-17 Line 521.239 68.665 0.92 -15.8

166
Appendix F
Table 5.7 Element Results of Loadflow of PHCN 330kV, 30Bus System
ID Node Element Type Loading PLoss QLoss Name name % MW MVAR 1 557 BUS 1 (Sapele) L01-21 Line 123.44 8.8705 66.1592 2 661 BUS 1 (Sapele) L01-25 Line 40.65 0.001 -0.0714 3 669 BUS 1 (Sapele) L01-07 Line 62.23 0.0027 -0.0616 4 137202 BUS 1 (Sapele) GEN 1 Synchronous 5 605 BUS 10 ( Egbin T.S.) L10-14 Line 405.03 0.1859 1.4747 6 621 BUS 10 ( Egbin T.S.) L10-16 Line 83.39 0.0426 -0.006 7 629 BUS 10 ( Egbin T.S.) L10-15 Line 359.71 0.0926 0.5998 8 685 BUS 10 ( Egbin T.S.) L04-10 Line 318.7 0.2973 2.0508 9 213 BUS 10 ( Egbin T.S.) Load 10 Load 10 182 BUS11(Birnin-Kabbi) Load 11 Load 11 373 BUS11(Birnin-Kabbi) L06-11 Line 83.03 0.2465 1.4747 12 175409 BUS11(Birnin-Kabbi) L11-27 Line 36.65 0.0154 0.0876 13 175820 BUS 12(Oshogbo) L12-21 Line 224.74 4.0016 30.1417 14 405 BUS 12(Oshogbo) L08-12 Line 160.49 1.3787 9.8415 15 493 BUS 12(Oshogbo) L12-13 Line 134.67 0.0363 0.2498 16 501 BUS 12(Oshogbo) L12-14 Line 16.28 0.0022 -0.2833 17 779 BUS 12(Oshogbo) Load 12 Load 18 201 BUS 13(Ibadan) Load 13 Load 19 493 BUS 13(Ibadan) L12-13 Line 134.7 0.0363 0.2498 20 509 BUS 13(Ibadan) L13-14 Line 71.42 0.0479 0.198 21 605 BUS 14(Ikeja West) L10-14 Line 405.7 0.1859 1.4747 22 645 BUS 14(Ikeja West) L14-15 Line 36.19 0.0229 0.1538 23 207 BUS 14(Ikeja West) Load 14 Load 24 501 BUS 14(Ikeja West) L12-14 Line 16.19 0.0022 -0.2833 25 509 BUS 14(Ikeja West) L13-14 Line 71.34 0.0479 0.198 26 517 BUS 14(Ikeja West) L14-21 Line 73.1 3.7639 27.9908 27 629 BUS 15(Akangba) L10-15 Line 359.9 0.0926 0.5998 28 645 BUS 15(Akangba) L14-15 Line 36.19 0.0229 0.1538 29 292 BUS 15(Akangba) Load 15 Load 30 621 BUS 16(Aja) L10-16 Line 83.41 0.0426 -0.006 31 286 BUS 16(Aja) Load 16 Load 32 445 BUS 17(Kaduna) L09-17 Line 102.25 1.0457 7.7329 33 461 BUS 17(Kaduna) L17-18 Line 101.1 0.1934 1.1831 34 469 BUS 17(Kaduna) L17-19 Line 0.18 0 -0.251 35 340 BUS 17(Kaduna) Load 17 Load 36 461 BUS 18(Kano) L17-18 Line 101.19 0.1934 1.1831 37 764 BUS 18(Kano) Load 18 Load 38 429 BUS 19(Jos) L19-29 Line 146.63 1.6746 12.2747 39 469 BUS 19(Jos) L17-19 Line 0 0 -0.251

167
ID Node Element Type Loading PLoss QLoss Name name % MW MVAR 40 477 BUS 19(Jos) L19-20 Line 112.88 0.9937 7.1639 41 364 BUS 19(Jos) Load19 Load 42 176 BUS 2(Jebba G.S.) GEN 2 Synchronous 43 485 BUS 2(Jebba G.S.) L02-08 Line 321.09 0.0064 0.0426 44 413 BUS 20(Gombe) L20-28 Line 76.71 0.1418 0.7589 45 477 BUS 20(Gombe) L19-20 Line 112.96 0.9937 7.1639 46 370 BUS 20(Gombe) Load 20 Load 47 557 BUS 21(Benin) L01-21 Line 123.44 8.8705 66.1592 48 573 BUS 21(Benin) L21-23 Line 93.34 6.0026 45.1013 49 175820 BUS 21(Benin) L12-21 Line 224.75 4.0016 30.1417 50 322 BUS 21(Benin) Load 21 Load 51 517 BUS 21(Benin) L14-21 Line 73.1 3.7639 27.9908 52 541 BUS 21(Benin) L21-22 Line 12.87 0.0048 -0.2005 53 175351 BUS 22(Ajaokuta) Load 22 Load 54 541 BUS 22(Ajaokuta) L21-22 Line 12.94 0.0048 -0.2005 55 573 BUS 23(Onitsha) L21-23 Line 93.34 6.0026 45.1013 56 589 BUS 23(Onitsha) L23-24 Line 117.3 0.4841 3.5218 57 316 BUS 23(Onitsha) Load 23 Load 58 732 BUS 23(Onitsha) L23-26 Line 104.22 0.6295 4.6164 59 589 BUS 24(Aba) L23-24 Line 117.26 0.4841 3.5218 60 597 BUS 24(Aba) L05-24 Line 491.46 0.4832 3.6089 61 453 BUS 24(Aba) L24-26 Line 335.54 0.3849 2.7795 62 310 BUS 24(Aba) Load 24 Load 63 661 BUS 25(Aladja) L01-25 Line 40.71 0.001 -0.0714 64 677 BUS 25(Aladja) L07-25 Line 34.08 0.0015 -0.0191 65 298 BUS 25(Aladja) Load 25 Load 66 549 BUS 26(Enugu) L26-29 Line 169.51 2.2491 16.6463 67 453 BUS 26(Enugu) L24-26 Line 335.65 0.3849 2.7795 68 732 BUS 26(Enugu) L23-26 Line 104.23 0.6295 4.6164 69 304 BUS 26(Enugu) Load 26 Load 70 175409 BUS 27(Sokoto) L11-27 Line 36.66 0.0154 0.0876 71 175420 BUS 27(Sokoto) Load 27 Load 72 175506 BUS 28(Maiduguri) Load 28 Load 73 413 BUS 28(Maiduguri) L20-28 Line 76.86 0.1418 0.7589 74 549 BUS 29(Makurdi) L26-29 Line 169.57 2.2491 16.6463 75 175482 BUS 29(Makurdi) Load 29 Load 76 429 BUS 29(Makurdi) L19- 29 Line 146.55 1.6746 12.2747 77 437 BUS 3(Shiroro G.S.) L03-09 Line 148.34 0.0219 0.1615 78 347 BUS 3(Shiroro G.S.) GEN 3 Synchronous 79 829 BUS 30(Abuja) L09-30 Line 70.01 0.1986 1.1963 80 175457 BUS 30(Abuja) Load 30 Load 81 685 BUS 4(Egbin G.S.) L04-10 Line 318.57 0.2973 2.0508 82 245 BUS 4(Egbin G.S.) GEN 4 Synchronous

168
ID Node Element Type Loading PLoss QLoss Name name % MW MVAR 83 823 BUS5(Afam) GEN 5 Synchronous 84 597 BUS5(Afam) L05-24 Line 491.44 0.4832 3.6089 85 373 BUS6(Kainji) L06-11 Line 82.9 0.2465 1.4747 86 389 BUS6(Kainji) L06-08 Line 45.49 0.0419 0.2286 87 160 BUS6(Kainji) GEN 6 Synchronous 88 669 BUS 7(Delta) L01-07 Line 62.25 0.0027 -0.0616 89 677 BUS 7(Delta) L07-25 Line 34.08 0.0015 -0.0191 90 252 BUS 7(Delta) GEN 7 Synchronous 91 389 BUS 8(Jebba T.S.) L06-08 Line 45.49 0.0419 0.2286 92 405 BUS 8(Jebba T.S.) L08-12 Line 160.46 1.3787 9.8415 93 421 BUS 8(Jebba T.S.) L08-09 Line 120.19 3.662 27.2664 94 485 BUS 8(Jebba T.S.) L02-08 Line 321.1 0.0064 0.0426 95 773 BUS 8(Jebba T.S.) Load 8 Load 96 829 BUS 9(Shiroro T.S.) L09-30 Line 69.95 0.1986 1.1963 97 421 BUS 9(Shiroro T.S.) L08-09 Line 120.18 3.662 27.2664 98 334 BUS9(Shiroro T.S.) Load 9 Load 99 437 BUS9(Shiroro T.S.) L03-09 Line 148.34 0.0219 0.1615 100 445 BUS9(Shiroro T.S.) L09-17 Line 102.25 1.0457 7.7329

169
Table 5.11 Bus Participation Factors APPENDIX G Eigenvalue ID Name Participation Factor Mvar/% 1 3.4951 175463 N175463-Maiduguri-B2 0.4960 2 53 B-53-Gombe-B20 0.4413 3 12.0129 148 N148-Kano-B18 0.9777 4 21.1896 175397 N175397-Sokoto-B27 0.6204 5 12 N12-Bimin-Kebbi-B11 0.3796 6 23.1243 175475 N175475-Makurdi-B29 0.3580 7 45 N45-Jos-B19 0.3005 8 77 B-77-Enugu-B26 0.1630 9 69 B-69-Onitsha-B23 0.0761 10 34.6424 41 B-41-Akangba-B15 0.5255 11 28 N28-Ibadan-B13 0.2574 12 49.2926 28 N28-Ibadan-B13 0.6578 13 41 B-41-Akangba-B15 0.3090 14 51.1237 89 B-89-Ajaokuta-22 0.5797 15 45 N45-Jos-B19 0.2004 16 58.8551 89 B-89-Ajaokuta-22 0.3461 17 45 N45-Jos-B19 0.3294 18 77 B-77-Enugu-B26 0.1179 19 69 B-69-Onitsha-B23 0.0886 20 107.3404 69 B-69-Onitsha-B23 0.4374 21 175475 N175475-Makurdi-B29 0.3982 22 120.5424 37 B-37-Aja-B16 0.3866 23 33 B-33-Ikeja West-B14 0.2101 24 136 N136-Egbin T.S.-B10 0.2016 25 41 B-41-Akangba-B15 0.1382 26 128.6551 53 B-53-Gombe-B20 0.3736 27 175463 N175463-Maiduguri-B2 0.3158 28 152 N152-Kaduna-B17 0.2164 29 131.8982 152 N152-Kaduna-B17 0.4331 30 53 B-53-Gombe-B20 0.1662 31 175427 N175427-Abuja-B30 0.1596 32 175463 N175463-Maiduguri-B2 0.1278 33 183.4425 57 N57-Aladja-B25 1.0000 34 194.8132 65 N65-Aba-B24 0.4041 35 69 B-69-Onitsha-B23 0.2503 36 77 B77-Enugu-B26 0.2255 37 175475 N175463-Makurdi-B29 0.1042 38 198.2067 24 N24-Oshogbo-B12 0.9088 39 214.9579 175427 N175427-Abuja-B30 0.6872 40 152 N152-Kaduna-B17 0.2769 41 223.3135 12 N12-Birnin-Kebbi-B11 0.6204 42 175397 N175397-Sokoto-B27 0.3796

170
Table 5.11 Bus Participation Factors APPENDIX G Eigenvalue ID Name Participation Factor Mvar/% 43 289.0459 65 N65-Aba-B24 0.4913 44 77 B-77-Enugu-B26 0.4446 45 420.3368 85 B-85-Benin-B21 0.6050 46 33 B-33-Ikeja West-B14 0.1843 47 37 B-37-Aja-B16 0.1682 48 495.4999 33 B-33-Ikeja West-B14 0.4084 49 85 B-85-Benin-B21 0.3348 50 37 B-37-Aja-B16 0.2354 51 1104.0739 20 N20-Jebba T. S.-B8 0.8980 52 1215.5813 144 N144-Shiroro T.S. B9 0.8583 53 1440.0306 136 N136-Egbin T.S.-B10 0.7362

171
Table 5.12 Branch Participation Factors APPENDIX H Eigenvalue ID Name Participation Factor Mvar/% 1 3.4951 469 L469 1.0000 2 517 L517 0.4706 3 453 L453 0.2584 4 421 L421 0.2263 5 445 L445 0.2232 6 597 L597 0.2170 7 12.0129 461 L461 1.0000 8 445 L445 0.9531 9 437 L437 0.4143 10 517 L517 0.3264 11 469 L469 0.2938 12 21.1896 373 L373 1.0000 13 517 L517 0.2010 14 23.1243 469 L469 1.0000 15 517 L517 0.9115 16 597 L597 0.8312 17 453 L453 0.8097 18 557 L557 0.5130 19 421 L421 0.3665 20 685 L685 0.3419 21 445 L445 0.2437 22 501 L501 0.2187 23 34.6424 685 L685 1.0000 24 629 L629 0.5098 25 493 L493 0.2817 26 49.2926 629 L629 1.0000 27 493 L493 0.8989 28 405 L405 0.4625 29 685 L685 0.4019 30 51.1237 557 L557 1.0000 31 469 L469 0.6559 32 541 L541 0.4852 33 597 L597 0.3835 34 629 L629 0.3338 35 573 L573 0.2340 36 517 L517 0.2168

172
Table 5.12 Branch Participation Factors APPENDIX H Eigenvalue ID Name Participation Factor Mvar/% 37 58.8551 469 L469 1.0000 38 597 L597 0.6627 39 541 L541 0.4949 40 557 L557 0.4640 41 453 L453 0.4207 42 473 L473 0.2316 43 517 L517 0.2293 44 445 L445 0.2150 45 107.3404 685 L685 1.0000 46 597 L597 0.8585 47 589 L589 0.8158 48 557 L557 0.8027 49 573 L573 0.6618 50 549 L549 0.6590 51 517 L517 0.5377 52 629 L629 0.4825 53 732 L732 0.4617 54 429 L429 0.4506 55 453 L453 0.4065 56 445 L445 0.3792 57 469 L469 0.3609 58 541 L541 0.3061 59 437 L437 0.2657 60 120.5424 685 L685 1.0000 61 629 L629 0.4262 62 128.6551 445 L445 1.0000 63 469 L469 0.9435 64 437 L437 0.9119 65 131.8982 469 L469 1.0000 66 445 L445 0.7707 67 437 L437 0.7433 68 183.4425 661 L661 1.0000 69 677 L677 0.9868 70 194.8132 597 L597 1.0000 71 589 L589 0.5368 72 557 L557 0.2651

173
Table 5.12 Branch Participation Factors APPENDIX H Eigenvalue ID Name Participation Factor Mvar/% 73 198.2067 405 L405 1.000 74 493 L493 0.6256 75 485 L485 0.2358 76 501 L501 0.2288 77 214.9579 445 L445 1.0000 78 469 L469 0.5934 79 437 L437 0.5259 80 223.3135 373 L373 1.0000 81 175409 L175409 0.3375 82 453 L453 1.0000 83 597 L597 0.7131 84 420.3368 557 L557 1.0000 85 517 L517 0.4106 86 605 L605 0.3160 87 613 L613 0.3160 88 495.4999 557 L557 1.0000 89 605 L605 0.5599 90 613 L613 0.5599 91 685 L685 0.2347 92 621 L621 0.2057 93 1104.0739 405 L405 1.0000 94 485 L485 0.6540 95 1215.5813 437 L437 1.0000 96 445 L445 0.5060 97 405 L405 0.3060 98 485 L485 0.2054 99 1449.9396 685 L685 1.0000 100 605 L605 0.4197 101 613 L613 0.4197 102 629 L629 0.2317

174
Table 5.13 Generator Participation Factors APPENDIX I Eigenvalue ID Name Participation Factor Mvar/% 1 3.4951 347 SM-347
1.0000
2 823
SM-823 0.7939
3 137202 SM-137202 0.3485 4 12.0129 347 SM-347 1.0000 5 21.1896 160 SM-160 1.0000 6 23.1243 823 SM-823 1.0000 7 137202 SM-137202 0.5790 8 347 SM-347 0.3440 9 34.6424 245
SM-245
1.0000
10 176 SM-176
0.2841
11 137202 SM-137202 0.2805 12 49.2926 176 SM-176 1.0000
13 245 SM-245 0.5080 14 160 SM-160 0.2433 15 51.1237 137202
SM-137202
1.0000
16 823 SM-823 0.3430 17 347 SM-347 0.2023 18 58.8551 823 SM-823 1.0000 19 137202 SM-137202 0.7800 20 347 SM-347 0.5636 21 107.3404 347 SM-347 1.0000
22 823 SM-823 0.9510 23 137202 SM-137202 0.9395 24 245 SM-245 0.5324 25 120.5424 245 SM-245 1.0000 26 128.6551 347 SM-347 1.0000

175
Table 5.13 Generator Participation Factors APPENDIX I Eigenvalue ID Name Participation Factor Mvar/% 27 131.8982 347 SM-347 1.0000 28 183.4425 252 SM-252 1.0000 29 137202 SM-137202 0.4135 30 194.8132 823 SM-823 1.0000 31 137202 SM-137202 0.2934 32 198.8132 176 SM-176 1.0000 33 160 SM-160 0.2453 34 214.9579 347 SM-347 1.0000 35 223.3135 160 SM-160 1.0000 36 289.0459 823 SM-823 1.0000 37 420.3368 137202 SM-137202 1.0000 38 495.4999 137202 SM-137202 1.0000 39 1104.0739 176 SM-176 1.0000 40 160 SM-160 0.2453 41 347 SM-347 0.2353 42 1215.5813 347 SM-347 1.0000 43 176 SM-176 0.2568 44 1449.9396 245 SM-245 1.0000

176
Appendix J TABLE5.15 NODES RESULTS PHCN 2004 BUS MODEL WITH COMPENSATORS S/N ID Location Bus
No. Node Type
Rating (Kv)
Loading %(V)
Gen MW
Gen MVAR
31. 61 Sapele 31. Slack 330 100 2064.678 104.808 32. 49 Jebba 32. PV 330 100 90.000 159.946 33. 93 Shiroro 33. PV 330 100 150.000 304.175 34. 140 Egbin 34. PV 330 100 220.000 694.338 35. 73 Afam 35. PV 330 100 72.000 698.532 36. 16 Kainji 36. PV 330 100 230.000 81.869 37. 81 Delta 37. PV 330 100 70.000 3.174 38. 20 Jebba 38. PG 330 99.94 0 0 39. 144 Shiroro 39. PG 330 100.3 0 0 40. 136 Egbin 40. PG 330 99.68 0 0 41. 12 Birnin Kebbi 41. PG 330 99.86 0 0 42. 24 Osogbo 42. PG 330 99.89 0 0 43. 28 Ibadan 43. PG 330 99.40 0 0 44. 33 Ikeja 44. PG 330 99.52 0 0 45. 41 Akangba 45. PG 330 99.20 0 0 46. 37 Aja 46. PG 330 99.50 0 0 47. 152 Kaduna 47. PG 330 100.16 0 0 48. 148 Kano 48. PG 330 99.57 0 0 49. 45 Jos 49. PG 330 99.54 0 0 50. 53 Gombe 50. PG 330 100.87 0 0 51. 85 Benin 51. PG 330 99.85 0 0 52. 89 Ajaokuta 52. PG 330 99.45 0 0 53. 69 Onitsha 53. PG 330 99.70 0 0 54. 65 Aba 54. PG 330 100.12 0 0 55. 57 Aladja 55. PG 330 99.90 0 0 56. 77 Enugu 56. PG 330 99.83 0 0 57. 175397 Sokoto 57. PG 330 100.04 0 0 58. 175463 Maiduguri 58. PG 330 100.87 0 0 59. 175475 Makurdi 59. PG 330 99.99 0 0 60. 175427 Abuja 60. PG 330 100.23 0 0

177