-
8/3/2019 Embedded System Design-Presentation
1/120
Embedded System Design
By
Dr K A Radhakrishna RaoProf in E & C Engg
-
8/3/2019 Embedded System Design-Presentation
2/120
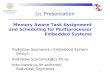
Typical Embedded System
Memory (EmbeddedFirmware)
Communication
System Core
(MP,MC,DSP,ASIC,PLD,
COTS)
Interface (USB,RS232)
O/P
Ports(Actuators)
Other supporting Ics,
Subsystems
I/P Ports
(sensors)
-
8/3/2019 Embedded System Design-Presentation
3/120
System core
Microprocessor (Intel 8085)
Microcontroller(AT89C51) x nx
Spartan)
Digital Signal Processor (DSP) (Blackfin processors)
Application Specific Integrated Circuit (ASIC)/Application
Specific Standard Product (ASSP)
(ADE7760 Single phase Energy Metering IC)
-
8/3/2019 Embedded System Design-Presentation
4/120
Embedded system viewed as REACTIVE system
REACTIVE system is one which responds to an input.
Embedded systems are basically designed to regulate a
physical variable or to manipulate the state of some
devices by sending some control signals to the Actuators
or devices connected to the O/p ports of the system, in
response to the input signals provided by the end users
or the sensors which are connected to the I/p port.
-
8/3/2019 Embedded System Design-Presentation
5/120
Common User Interface (I/O ports):
Input devices Key boards, push-button switches
Output devices Buzzers, LED, LCD
Not allNot allNot allNot all iiii/p and o/p devices are used
with any/p and o/p devices are used with any/p and o/p devices are
used with any/p and o/p devices are used with anyembedded system,
it is only application dependent.embedded system, it is only
application dependent.embedded system, it is only application
dependent.embedded system, it is only application dependent.
egegegeg. Mobile applications requires keyboard & screen.
Mobile applications requires keyboard & screen. Mobile
applications requires keyboard & screen. Mobile applications
requires keyboard & screen
Embedded systems could be automaticEmbedded systems could be
automaticEmbedded systems could be automaticEmbedded systems could
be automatic i.ei.ei.ei.e wholewholewholewholeprocess of control
and monitoring could beprocess of control and monitoring could
beprocess of control and monitoring could beprocess of control and
monitoring could beautomated.automated.automated.automated.
-
8/3/2019 Embedded System Design-Presentation
6/120
Communication Interface: Serial and parallel devices such as
USB, DB9, parallel
port and RS 232.
Communication interface devices providesconnect v ty w t ot er
ev ces or systems.
Memory: Responsible for holding control algorithm and other
configuration details Typical memory types are OTP, PROM,
UVPROM,
EEPROM and FLASH
-
8/3/2019 Embedded System Design-Presentation
7/120
Core of the Embedded System
1. General purpose and Domain Specific Processors
Microprocessors
Microcontrollers
Digital Signal Processors
2. Application Specific Integrated Circuits (ASIC)
3. Programmable Logic Devices (PLDs)
4. Commercial off-the- shelf Components(COTS)
-
8/3/2019 Embedded System Design-Presentation
8/120
General purpose and Domain Specific Processors Microprocessors
typically consists of CPU which internally contains
ALU, control unit and working registers.
It requires supporting chips to be fully functional
Intel 4004 (4-bit processor) , Intel 4040 (advanced features
incomparison to 4004),Intel 8008(similar to 4040 but with 14 bit
PC),
-, - ,version additional instructions, interrupts, power supply
of +5V) ,Z80(concept of register banking by doubling register
set)
16, 32 and 64 bit processors, clock speed drastically raised,
morecompetitors in the market, low cost and low power issues
addressed)
Intel, AMD, Freescale, IBM, TI, Cyrix, Hitachi, NEC, LSI logic
are keyplayers
Harvard and Von-Neumann are the two common architectures
forprocessor design
-
8/3/2019 Embedded System Design-Presentation
9/120
General Purpose Processor (GPP) vs Application Specific
Instruction Set Processor (ASIP)
GPP meant for general computational tasks (Pentium 4/AMD
Athlon, etc) Produced in lar e uantit
ASIP are processors with architecture and instruction
setoptimized to specific-domain/application requirements
likenetwork processing, automotive, telecom, mediaapplications,
DSP, control applications
ASIP fill the architectural spectrum between general
purposeprocessors and ASICs.
Most of the Embedded systems are built around ASIPs
-
8/3/2019 Embedded System Design-Presentation
10/120
Microcontrollers: Highly integrated containing CPU, scratch pad
RAM, special and general
purpose register arrays,on chip ROM/FLASH memory for program
storage,timer and interrupt control units and dedicated I/O
ports.
Super set of microprocessors
More suitable for Embedded systems Cheap, cost effective and
readily available
TI 1000 rst m crocontro er , Inte MCS-48 am
y(8038HL,8039HL,8040HL,8048HL,8049AH)
8051 most popular MC. PIC form Microchip Technologies is equally
popular. Itis a high performance RISC microcontroller complementing
CISC features of8051.
ARM 11 series provides solution to applications requiring
hardware
acceleration and high processing capability. Freescale, NEC,
Zilog, Hitachi, Mitsubishi, Infineon, ST Electronics, National,
TI,
Toshibha, Philips, Microchip. Analog Devices, Daewoo, Intel,
Maxim, Sharp,Silicon Laboratories, TDK, Triscend, Winbond, Atmel
are the key players inMicrocontroller market.
-
8/3/2019 Embedded System Design-Presentation
11/120
Digital Signal Processors:
Dedicated hardware to address signal processing tasks
Speed not just dependent on clock used but on the specific
hardware u p y ccumu a on n one c oc cyc e
Harvard architecture (separate Data and Program memory)
Audio video signal processing, telecommunication and
multimedia applications are typical examples where DP is
involved.
Blackfin from Analog Devices and TMS series from TI are
typical DSPs.
-
8/3/2019 Embedded System Design-Presentation
12/120
RISC or CISC
RISC (Reduced Instruction Set Computer)
CISC (Complex Instruction Set Computer)
having only 32 instructions
Example of CISC: AT89C51 having 255 instuctions
Note: It is not just number of instructions whichdetermine the
processor to be RISC or CISC, thereare many other criteria.
-
8/3/2019 Embedded System Design-Presentation
13/120
RISC CISC
Lesser no. of instructions Greater no. of instructions
Instruction pipelining and execution
speed
Generally no instruction pipelining feature
Orthogonal instruction set Non-orthogonal instruction set
Operations are performed on registers
only, memory operations restricted to
load and store
Operations are performed on registers
and memory depending on instruction
A large number of registers are available Limited no. of general
purpose registers
Longer code length to execute a task Shorter code length to
execute a taskSingle, fixed length instructions Variable length
instructions
Less silicon usage and pin count More silicon usage
Harvard architecture Can be Harvard or Von-Neumann
-
8/3/2019 Embedded System Design-Presentation
14/120
Harvard vs Von-Neumann
I/O CPU Memory
Single shared bus
Program
Memory CPUData
Memory
-
8/3/2019 Embedded System Design-Presentation
15/120
Harvard Architecture Von-Neumann Architecture
Separate buses for instructions and data
fetching
Single shared bus for instructions and
data fetching
Easier to pipeline thus high performance Low performance
No memory alignment problems Allows self modifying
codesSelf-modifying code is a code/instruction which modifies
itself
while execution
No chances for accidental corruption of
PM as it is separate from DM
Chances of corruption of PM
-
8/3/2019 Embedded System Design-Presentation
16/120
Big Endian vs Little-Endian Processors/Controllers
Endianness specifies the order in which the data isstored in the
memory by processor operations in a
multi byte system, Two ways of doing this are e n an: ower-or er
y e o e a a s s ore n
memory at the lowest address, and the higher orderbyte at the
highest address (The little end comes first)
Base Address +0 Byte 0 Byte 0 0x20000(Base Addr)
Base Address +1 Byte 1 Byte 1 0x20001(Base Addr+1)
Base Address + 2 Byte 2 Byte 2 0x20002(Base Addr + 2)
Base Address +3 Byte 3 Byte 3 0x20003(Base Addr + 3)
-
8/3/2019 Embedded System Design-Presentation
17/120
Big Endian: Higher order byte of the data is stored
in memory at the lowest address, and the lower-
order byte at the highest address (The big end comes
first)
Base Address +0 Byte 3 Byte 3 0x20000(Base Addr)
Base Address +1 Byte 2 Byte 2 0x20001(Base Addr+1)Base Address +
2 Byte 1 Byte 1 0x20002(Base Addr + 2)
Base Address +3 Byte 0 Byte 0 0x20003(Base Addr + 3)
-
8/3/2019 Embedded System Design-Presentation
18/120
Load Store Operation and Instruction
Pipelining
Load Store ArchitectureR1 R2 R3
ALU
xyz
-
8/3/2019 Embedded System Design-Presentation
19/120
Load R1, x
Load R2,y
Load R3, R1, R2
Store R3, z
fetch-decode-execute
While decode-execute stage, next fetch can beoverlapped as
memory address bus is free.
Fetch will go waste in case of present executeinstruction is
branch or jump
Multiple levels of pipelining is possible.
-
8/3/2019 Embedded System Design-Presentation
20/120
Application-Specific Integrated Circuits (ASICs) A microchip
designed to perform a specific or unique application
Integrates several functions into a single chip and there bt=y
reduces the systemdevelopment cost
Most of them are Proprietary products
As a single chip, ASIC consumes a very small area in the total
system and therbyhelps design of smaller systems with high
capabilities/functionalities
Pre-fabricated or custom fabricated using re-usable building
block library ofcomponents for a particular customer
application.
Profitable only in case of large volume commercial
productions.
Non-refundable initial investment required Non Recurring
Engineering Charge(NRE)
If NRE is borne by third party then ASIC is made openly
available in the market,the ASIC is then referred to as Application
Specific Standard Product (ASSP). TheADE 7760 Energy meter is one
example.
Generally internal details of the chip are not revealed.
-
8/3/2019 Embedded System Design-Presentation
21/120
Programmable Logic Devices
Logic devices performs specific logical functions
Logic devices are broadly classified as fixed and
Programmble
PLDs offer customers a wide range of logic capacity, features,
speed andvolatage-characteristics
These devices can be re-configured to perform any number of
functions at.
PLD designers make use of inexpensive software tools to quickly
develop,simulate, and test their designs. (eg., network router, a
DSL modem, aDVD player, or an automotive navigation system)
There is no NRE costs and the final design is completed much
faster than
that of a custom, fixed logic device Customers can change the
circuitry as often during the design phase until
it operates to their satisfaction. This mainly due to its
programmablenature on re-writable memory.
-
8/3/2019 Embedded System Design-Presentation
22/120
Twp major types of PLDs are CPLDs and FPGAs.
FPGAs offers highest amount of logic density, the mostfeatures
and the highest performance.
(ex. Xilinx Virtex line of devices, provides eight millionsystem
gates)
These devices also offers features such as built-inhardwired
processors, substantial amounts of memory,clock management systems
and suport for many latest,very fast device-to-device signaling
technologies.
FPGA are used in data processing and storage,instrumentation,
telecommunication and signalprocessing applications.
-
8/3/2019 Embedded System Design-Presentation
23/120
CPLDs offer much smaller amounts of logic-up
about 10,000 gates.
They offer very predictable timing
critical control applications. Ex., Xilinx
CoolRunner series
Low amounts of power, inexpensive.
-
8/3/2019 Embedded System Design-Presentation
24/120
Advantages of PLD
More flexibility during design cycle
Do not require long-lead times for prototypes or
production parts
No large NRE charges on customers
Customer can order just the number of parts theyneed, when they
need them, allowing them to
control inventory PLDs can be reprogrammed even after a piece
of
equipment is shipped to a customer.
-
8/3/2019 Embedded System Design-Presentation
25/120
Commercial Off-the-Shelf Components(COTS)
COTS product is one which is used as-is
These are designed in a such a way to provide easy integration
andinteroperability with existing system components.
COTS component itself can be developed around a general purpose
or
domain specific processor or an ASIC or a PLD.. , ,
plug-in module (WIZnet, Freescale, Dynolog)
Major advantage is that they are available in the market, cheap
anddeveloper can cut his cost
Identifying proper COTS is the task and provide the plug-in
option on the
board. There is no operational and manufacturing standards among
the vendors
Major disadvantage is that manufacturer withdraws the COTS
componentany time.
-
8/3/2019 Embedded System Design-Presentation
26/120
MEMORY
On-Chip , Off-chip and working Memory
Program Storage memory (ROM)
Different types of ROM used in storing program
codes are Flash, NVRAM,PROM(OTP), Masked
ROM (MROM), EPROM, EEROM
Program storage memory is non-volatile
-
8/3/2019 Embedded System Design-Presentation
27/120
Masked ROM (MROM): It is a one-time programmable device
Makes use of hardwired technology for storing the data. Device
isfactory programmed by masking and metallisation process at the
timeof production itself.
It is low cost for high volume production ec an sms use w mas ng
process
Creation of an enhancement or depletion mode transistor through
channelimplant
By creating the memory cell either using a standard transistor
or a highthreshold transistor. In the high threshold mode, the
supply voltage requiredto turn ON the transistor is above the
normal ROM IC operating voltage. This
ensures that the transistor is always off and the memory cell
stores alwayslogic 0.
Major disadvantage is that there is no flexibility in modifying
thefirmware once programmed.
-
8/3/2019 Embedded System Design-Presentation
28/120
PROM:
Can be programmed by end user.
This memory has nichrome or polysilicon wirees. .
Programming the PROM is by selective
burning/blowing the fuses
Fuse not blown/burnt represent logic 1.Defaultlogic is 1
OTP can be programmed only once.
-
8/3/2019 Embedded System Design-Presentation
29/120
EPROM: Flexible as it can be erased and reprogrammed
EPROM stores the bit information by charging the floating gate
of anFET. EPROM programmer are used to store bit-information
High voltage is used to charge the floating gate.
Erasing is done by exposing quartz crystal window to UV rays.
Entirememory s erase w en expose o rays or xe ura on
Erasing is a tedious and time-consuming process as it requires
chip tobe taken out and exposed to UV rays for 20-30 mins.
EEPROM uses electrical signals at the register/Byte level to
alter
They can be erased and reprogrammed in-circuit
Very flexible in terms of erasing and reprogramming Disadvantage
is that it has limited capacity compared to standard
ROM
-
8/3/2019 Embedded System Design-Presentation
30/120
FLASH Latest and most popular ROM technology
Variation of EEPROM technology
It combines the re-programmability of EEPROM and the high
capacity ofstandard ROMs
FLASH memory is organised as sectors (blocks) or pages and
storesinformation in an array of floating gate MOSFET
transistors.
Erasing of memory can be done at sector or page level and should
be donebefore re-programming
The typical erasable capacity of FLASH is 1000 cycles
W27C512 from WINBOND is an example of 64KB FLASH memory
NVRAM
Non Volatile RAM is random access memory with battery back-up.
Contains static RAM and a minute battery for providing supply to
the memory
in the absence of external power supply. Both are packed
together in a singlepackage.
Life span is typically 10years.DS1644 from Maxim/Dallas is 32KB
NVRAM
-
8/3/2019 Embedded System Design-Presentation
31/120
Read-Write Memory/Random Access
Memory(RAM)
RAM is used as data or working memory. Both
.
accessing is random.
Static RAM (SRAM), Dynamic RAM (DRAM) and
Non-Volatile RAM (NVRAM) are major types.
-
8/3/2019 Embedded System Design-Presentation
32/120
SRAM This stores data in the form of voltage and they are
made
up of flip-flops.
This is fastest among the types of RAM.
In a typical implementation, a SRAM cell (storing one bitn orma
on s rea se us ng s x rans s ors or
MOSFETs).
Four of the transistors are used for building the latch partof
the memory and two for controlling the access.
SRAM is fast in operation due to its resistive networkingand
switching capabilities.
Major disadvantage of SRAM are low-capacity and highcost.
-
8/3/2019 Embedded System Design-Presentation
33/120
DRAM
Stores data in the form of charge.
It is made up of MOS transistor gates.
Since it is stored in the form of charge, it faces
leakage problem and calls for periodic refreshing.
Special DRAM controllers are used for periodicrefreshing (in
milliseconds interval).
-
8/3/2019 Embedded System Design-Presentation
34/120
Memory according to the Type of Interface
Parallel Interface(parallel data lines of processor
connected to data lines of memory)
2 -
Serial peripheral interface(SPI) [ 2+n line interface
where n stands for the total number of SPI bus
devices in the system] Single wire interconnection(ex Dallas
1-Wire
interface)
-
8/3/2019 Embedded System Design-Presentation
35/120
Memory Shadowing Execution of program or configuration reading
from ROM is generally slower
compared with that of RAM due to difference in memory accessing
timings.
Memory shadowing is used to enhance program executing or
configurationsetting.
Basic Input Output configuration ROM or simply BIOS is used to
holdimportant hardware configuration setting of a system.
Data in the BIOS is usually read in the beginning and system is
configuredaccordingly, it is time consuming process.
RAM is included behind the logical layer of BIOS at its same
address as ashadow to the BIOS.
First step that happens during the boot up is copying the BIOS
to theshadowed RAM and write protecting the RAM then disabling BIOS
reading.
Non-volatile nature of RAM requires data to be in ROM and high
accessingspeed of RAM helps one to speed up the process.
-
8/3/2019 Embedded System Design-Presentation
36/120
Memory Selection for Embedded Systems No general rule
Application and situation dependent
Many factors influence while deciding on size and type of memory
(Cost,mobility, power conservation)
Real time applications need separate consideration (RTOS
selection, RAM andROM share, keeping image of Program in ROM while
running the codes fromRAM)
Normally the binary code for RTOS kernel containing all the
services is storedin a non-volatile memory (like FLASH) as either
compressed or non-compressed data. During boot- up of the device
the RTOS files are copied fromthe program storage memory and then
loaded to the RAM for execution.
Always have buffer (extra) memory
Memory comes in definite sizes and near closest on higher end is
chosen.
Choose total amount of memory based on address bus size.
NAND and NOR flash
-
8/3/2019 Embedded System Design-Presentation
37/120
Sensors and Actuators Sensors are means of collecting physical
status of the system and they are the
input to Embedded system
Actuators are the means of driving the control mechanism which
itself iscontrolled by output of the embedded system .
Sensors and Actuators are not mandatory, it depends on the
application
If the system is only designed for monitoring then there is no
necessity ofactuators.
Sensor is a transducer that converts energy from one form to
another for anymeasurement or control purpose.
Actuator is a form of transducer (mechanical or electrical)
which convertssignals to corresponding physical action
(motion).
Both sensors and actuators constitute part of I/O subsytem.
Both sensors and actuators are not directly connected to
embedded system ,it is generally done through I/O interface which
takes care of signal matchingetc..
-
8/3/2019 Embedded System Design-Presentation
38/120
Light Emitting Diode(LED) It is a p-n junction diode
LED can be driven by Logic 0 or 1 level of the processor(source
/sink option)
7-segment LED Display Contains 8 light emitting diode arranged
in a special form
7 LEDs are used for displaying alpha numeric charactersand 1
used for decimal point display.
Common anode and common cathode LED display
-
8/3/2019 Embedded System Design-Presentation
39/120
Optocoupler
It is a solid state device to isolate two parts of acircuit.
It combines LED and photo-transistor in a single
.
It is used in electronic circuits for suppressinginterference in
data communication, circuit isolation,high voltage separation,
simulataneous separation
and signal intensification An example for a optocoupler is MCT2M
from
Fairchild semiconductors.
-
8/3/2019 Embedded System Design-Presentation
40/120
-
8/3/2019 Embedded System Design-Presentation
41/120
Stepper Motor It is an Electro-mechanical device which
generates
discrete displacement (motion) in response to dcelectrical
signals.
Different in operation in comparison to normal dcmotor
It is continuous rotation in case of normal dc motorwhere as it
discrete rotation for the applied dc inputin case of stepper
motor.
Widely used in industrial embedded applications,robotics control
systems, consumer electronicproducts.
-
8/3/2019 Embedded System Design-Presentation
42/120
Based on the coil winding arrangements , a two-phasestepper
motor is classified into: Unipolar
Bipolar
Unipolar has two windings per phase
The direction of rotation (clockwise or anticlockwise)
iscontrolled by changing the direction of current flow
Current in one direction flows through one coil and
opposite in other coil Direction is changed by switching the
terminals to which
the coils are connected
-
8/3/2019 Embedded System Design-Presentation
43/120
A,B,C and D represent coils
Coils A and C carry current in opposite directions for
phase 1 (only one of them will be carrying current at
a time), similarly, B and D carry current in oppositedirections
for phase 2.
-
8/3/2019 Embedded System Design-Presentation
44/120
Bipolar
It has single winding per pahse
For reversing the motor rotation the current flow
Complex circuitry is required for current flow
reversal.
-
8/3/2019 Embedded System Design-Presentation
45/120
-
8/3/2019 Embedded System Design-Presentation
46/120
The stepping of stepper motor can be
implemented in different ways by changing
the sequence of activation of the stator
.
Full step: Out of the two windings, only one
winding of a phase in energised at a time
Step Coil A Coil B Coil C Coil D
1 H H L L
2 L H H L
3 L L H H
4 H L L H
-
8/3/2019 Embedded System Design-Presentation
47/120
Wave Step: Only one phase is energised at a
time and each coils of the phase is energised
alternatively
Step Coil A Coil B Coil C Coil D
1 H L L L
2 L H L L
3 L L H L
4 L L L H
-
8/3/2019 Embedded System Design-Presentation
48/120
Half Step: It sues combination of wave and full
step. It has the highest torque and stability.
Step Coil A Coil B Coil C Coil D
1 H L L L
2 H H L L
3 L H L L
4 L H H L
5 L L H L
6 L L H H
7 L L L H
8 H L L H
-
8/3/2019 Embedded System Design-Presentation
49/120
Two-phase unipolar stepper motors arepopular choise
Port pins of Microprocessor/microcontroller
ma not be able to drive the motors
Voltage requirement is in the range of 5 to 24volts
Drivers are needed, ULN2803 is a octalperipheral driver array
available from ONsemiconductors and ST microelectronics
-
8/3/2019 Embedded System Design-Presentation
50/120
-
8/3/2019 Embedded System Design-Presentation
51/120
Relays: It is a Electro-mechanical device
Dynamic path selector for signals and power
Magnetic field generated due to current flow attracts armature
core
Most of the industrial relays are bulky and requires high
voltage to
operate. Reed relays use low voltage DC which is used with
ES
-
8/3/2019 Embedded System Design-Presentation
52/120
A free-wheeling diode is used for free-wheeling the
voltageproduced in the opposite direction when the relay coil is
de-energised. The free wheeling diode is essential for protecting
therelay and the transistor .
-
8/3/2019 Embedded System Design-Presentation
53/120
Piezo Buffer It is a piezoelectric device for generating audio
indications in
embedded application.
It contains piezoelectric diaphragm which produces audiblesound
in response to the voltage applied to it.
Self drivin and External drivin are the two t es.
Self driving has all the necessary components to
generatepredefined tone
External driving supports generation of different tones.
Tone can be varied by applying a variable pulse train to the
piezoelectric buffer. This can be directly interfaced to the
port pin o fthe processor
Transistor drive circuit can be used in case of higher
driverequirement.
-
8/3/2019 Embedded System Design-Presentation
54/120
Push Button Switch Input device, Push to Make and Push to break
are two types
Configured to used with LOW or HIGH
Key Board
Array of keys arranged in matrix form reat y re uces num er o
nter ace connect ons ex to connect
16 keys, we need 16 port pins where as if it is arranged as
4x4then only 8 pins are needed)
Scanning technique is used to identify key pressing.
Rows are o/p ports and columns are i/p port. Sequentially
each
row is pulled down and columns are scanned. De-bouncing is a
standard problem. Hardware and Software
solutions are possible.
-
8/3/2019 Embedded System Design-Presentation
55/120
-
8/3/2019 Embedded System Design-Presentation
56/120
Programmable Peripheral Interface (PPI)
Supports 24 I/O pins (I/O, Handshake, BSR modes)
Either used as three 8-bit I/O ports or two 8 bit
8 individual I/O pins
Two 4-bit ports
Control word defines roles of ports/pins
-
8/3/2019 Embedded System Design-Presentation
57/120
-
8/3/2019 Embedded System Design-Presentation
58/120
Communication Interface
Communication interface is essential for
communicating with various subsystems of the
embedded s stem and with the external world
Two perspectives of communication interface with
embedded systems
Onboard communication interface (connecting onboard
components)
External communication interface(connecting outside
embedded system)
-
8/3/2019 Embedded System Design-Presentation
59/120
Examples of Onboard communication interface are I2C, SPI, UART
1-Wire
External communication interface is responsible for data
transferbetween the embedded system and other devices or modules.
Thiscan be either wired or wireless media and it can be serial
or
parallel. (ex Mobile communication equipment) n rare , ue oo ,
re ess - , a o requency
waves (RF), GPRS are exaples of wireless communication
interface.
RS-232C/RS-422/RS-485, USB, Ethernet IEEE 1394 port,
Parallelport, CF-II interface, SDIO, PCMCIA are examples for
wiredinterfaces.
It is not mandatory that embedded system should contain
anexternal communication initerface.
-
8/3/2019 Embedded System Design-Presentation
60/120
Onboard Communication Interfaces Inter Integrated Circuit (I2C)
Bus:
Synchronous bi directional half duplex two wire serial interface
bus.
Developed by Philips Semiconductors in the early 1980s to be
usedwith connecting Microprocessor and peripheral chips in
television sets
Has two bus lines; Serial Clock-SCL and Serial Data SDA. SCL
line is responsible for generating synchronisation clock pulses
and
SDA is responsible to carry serial data.
I2C is a shared bus to which many devices can be connected.
Devicescan be Master or Slave. Master take responsibility of
sendingsynchronizing clocks and serial data.
Master and Slave devices can act as either transmitter or
receiver.Master either as transmitter or receiver is responsible
for sendingsynchronizing clock pulses.
I2C supports multi masters on the same bus.
-
8/3/2019 Embedded System Design-Presentation
61/120
-
8/3/2019 Embedded System Design-Presentation
62/120
I2C bus interface is built around an input bufferand an open
drain/collector transistor.
When the bus is in the idle state, the open drain
/collector transistor will be in the floating stateand the
output lines SDA and SCL switch to theHigh Impedance state. For
proper operation ofthe bus, both the bus lines should be pulled
to
the voltage using pull-up resistors. With pull-upresistors, the
output lines of the bus in the idlestate will be HIGH
-
8/3/2019 Embedded System Design-Presentation
63/120
Sequence of operations for communicating with an I2Cslave
device:1. The master device pulls the clock line (SCL) of the bus
to HIGH
2. The master device pulls the data line (SDA) LOW when the SCL
line is at logic HIGH (this isthe start condition for data
transfer)
3. The master device sends the address of the slave device over
the SDA line. Clock pulses aregenerated at the SCL line for
synchronizing the bit reception by the slave device. The MSBof the
data is always transmitted first. The data in the bus is valid
during the HIGH period
of the clock signal. . ,
write)
5. Master waits for the acknowledgement from slave while slave
dcode the address sent onthe SDA line
6. Slave device sends an acknowledgement over SDA line
7. Master transmits 8-bit data over SDA line if it is write
operation or slave sends the data if itis Read operation
8. Acknowledgement for data transfer is done (either master or
slave will send depending onread or write operation)
9. The master device terminates the transfer by pulling the SDA
line HIGH when the clockline SCL is at logic HIGH (indicating the
STOP condition)
-
8/3/2019 Embedded System Design-Presentation
64/120
Three different rates supported by I2C are; Standard mode
(100kbps)
Fast mode (400kbps)
High speed mode(3.4mbps)
Serial Peripheral Interface (SPI) Bus
It is synchronous, bi-directional full-duplex four wire serial
interface bus
It is a single master multi-slave system
More than one master is allowed but only one will be active at a
time.
Signals used with SPI are: Master Out Slave In (MOSI): Signal
carrying data from master to slave device. It is also
known as Slave Input/Slave Data In (SI/SDI)
Master In Slave Out (MISO): Signal line carrying data from slave
to master device. It isalso known as Slave Output (SO/SDO)
Serial Clock (SCLK): Signal line carrying clock signals
Slave Select (SS): Signal line for slave device select. It is
active low signal.
-
8/3/2019 Embedded System Design-Presentation
65/120
Master is responsible for generating clock signal. It selects
the required slavedevice. The data outline (MISO) of all the slave
devices when not selected floats athigh impedance state.
Serial data transmission through SPI bus is fully configurable.
Certain set ofregisters are used for this. The serial peripheral
control register holds theconfiguration parameters such as slave
select address, baud rate, clock signal
control etc. The status register holds the status of various
conditions for TX and RX. .
device have special shift registers. Size of the shift register
is normally devicedependent and it is generally multiple of 8.
Shift registers of master and slave forms a circular buffer.
Data transfer happensfrom master shift register to slave shift
register through MOSI pin. Whereasotherwise communication is
through MISO pin.
Comparison to I2C bus, SPI bus is most suitable for applications
requiring transfer
data in Streams. Limitation is that it does not support
acknowledgement mechanism.
-
8/3/2019 Embedded System Design-Presentation
66/120
-
8/3/2019 Embedded System Design-Presentation
67/120
Universal Asynchronous Receiver Transmitter (UART) Asynchronous
serial data transmission, no clock signal required.
Pre defined rules and agreements control the data transfer.
The serial communication settings (baud rate, number of bits per
byte,parity, number of start and stop bits and flow control ) for
both Tx and
Rx should be set as identical. o ng o a a a x s one a e ra e x
secon s w ere x s e
baud rate. The receiver unit polls the receiver line exactly
half of thetime slot available for the bit.
Parity adding and checking is done at Tx and Rx
respectively.
In addition to the serial data transmission function, UART
provideshardware handshaking signal support for controlling the
serial dataflow.
National semiconductors 8250 is an example for UART chip.
Present day processors/controllers comes with integrated
UARTfunctionality.
-
8/3/2019 Embedded System Design-Presentation
68/120
-
8/3/2019 Embedded System Design-Presentation
69/120
1-Wire Interface
It is an asynchronous half-duplex communication
protocoldeveloped by Maxim Dallas. It is also referred to as
Dallas1-wire protocol.
Sin le line called DQ is used for communication. Master-Slave
communication model is followed.
Power can be sent along the signal-wire
Supports single master and one or more slave devices.
Every 1-wire device contains a globally unique 64
bitidentification number stored within it. The identifier asthree
parts: an 8-bit family code, a 48-bit serial numberand an 8-bit CRC
computed from the first 56 bits.
-
8/3/2019 Embedded System Design-Presentation
70/120
-
8/3/2019 Embedded System Design-Presentation
71/120
The communication protocol is:1. The master device sends a Reset
pulse on the 1-wire bus
2. The slave device present on the bus respond with a Presence
pulse
3. The master device sends a ROM command (Net address
commandfollwoed by the 64 bit address of the device). This
addresses the
slave devices to which it wants to initiate a communcation.. e
mas er ev ce sen s a rea wr e unc on comman o rea
/write the internal memory or register of the slave device.
5. The master initiates a Read data/Write data from the device
or tothe device.
All communication over 1-wire bus is mater initiated.
Communication is divided into timeslots of 60 microseconds. Each
operation of data communication is expressed interms of
above time slots. Ex In the step -1 Reset pulse occupies 8
timeslots.
-
8/3/2019 Embedded System Design-Presentation
72/120
-
8/3/2019 Embedded System Design-Presentation
73/120
Parallel Interface Generally used with memory mapped devices
onboard
The host processor/controller of the embedded system containsa
parallel bus and the device which supports parallel bus candirectly
connect to this bus system
Communication on this bus is controlled throu h control si
nalinterface.
Control signal includes Read and write and device
select.Direction of data transfer is controlled by Read and Write
signal.
Strict timing characteristics are followed for
parallelcomunication.
Parallel communication is always host initiated
If the device wants initiate a data transfer then
interruptmechanism is used.
-
8/3/2019 Embedded System Design-Presentation
74/120
-
8/3/2019 Embedded System Design-Presentation
75/120
External Communication Interfaces RS-232 C & RS-485
RS-232 C (Recommended Standard number 232,revision Cfrom the
Electron Industry Association(EIA)) is a legacy, full
duplex, weird, asynchronous serial communication interface eve
ope n s. - ex en s e
communication signals for external data communication
RS-232 follows EIA standard for bit transmission (logic 0
isrepresented by voltage +3 to +25 V and logic 1 isrepresented with
voltage between -3 to -25 V. Logic 0
referred to as Space and logic 1 known as Mark RS-232 has
various handshaking signals for data
communication apart from standard transmit and receive
Two connectors are supported DB-9 and DB-25
-
8/3/2019 Embedded System Design-Presentation
76/120
1 5
4 9
11
3
1
4
2
5
-
8/3/2019 Embedded System Design-Presentation
77/120
Pin
name
DB-9 DB-25 Description
TXD 3 2 Transmit pins for transmitting serial data
RXD 2 3 Receive pin for Receiving serial data
RTS 7 4 Request to send
CTS 8 5 Clear to send
DSR 6 6 Data set ready
GND 5 7 Signal Ground
DCD 1 8 Data Carrier detect
DTR 4 20 Data terminal Ready
RI 9 22 Ring Indicator
FG 1 Frame Ground
SDCD 12 Secondary DCD
SCTS 14 Secondary CTS
STXD 15 Secondary TXD
-
8/3/2019 Embedded System Design-Presentation
78/120
Pin
name
DB-9 DB-25 Description
TC 15 Transmission Signal Element Timing
SRXD 16 Secondary RXD
RC 17 Receiver Signal Element Timing
SRTS 19 Secondary RTS
SQ 21 Signal Quality detector
NC 9 No connection
NC 10 No connection
NC 11 No connection
NC 18 No connection
NC 23 No connection
NC 24 No connection
NC 25 No connection
-
8/3/2019 Embedded System Design-Presentation
79/120
Data Terminal Equipment (DTE) and Data Communication Equipment
(DCE) are involved in point-to-point communication usingRS-232
If no data flow control is required then it is only TXD and RXD
are required in crossconnection mode.
Control signals are used for modem communication .
RTS and CTS signals coordinate the communication between DTE and
DCE.
DTR and DSR are acknowledgement kind of signals from DTE and DCE
respectively.
DCD is used by the DCE to indicate the DTE that a god signal is
being received.
RI is a modem specific signal line for indicating an incoming
call on the telephone line.
The 25 pin DB connector contains two sets of signal lines for
transmit, receive and controllines. Now a days DB-25 connector is
obsolete.
Baud rate supported are 300bps,1200bps,9600bps,11.52kbps and
19.2kbps. 9600 bps is themost widely used one.
Maximum operating distance of RS-232 is 50 feet
UART is used as onboard communication interface in most of the
embedded systemsconversion from onboard to RS-232 is done through
converters both at TX and RX. (eg MAX232)
-
8/3/2019 Embedded System Design-Presentation
80/120
Disadvantages of RS-232 Bluetooth, USB, Firewire technologies
have pushed RS-232
technology.
RS-232 supports only point-to-point communication not suited
formulti-drop communication
Since it uses single ended data transfer technique for
signaltransmission and threb more susce tible to noise and this
reatlreduces the operating distance.
RS-422 is another standard from EIA supporting 100kbps baudrate
over 400 feet. It is compatible with RS-232, converters
areneeded.
Multi-drop communication with one TX device and Rx devices
upto 10. RS-485 is the enhanced version of RS-422. It can go up
to 32
receivers. The communication between devices in the bus usesthe
addressing mechanism to identify slave sections.
-
8/3/2019 Embedded System Design-Presentation
81/120
Universal Serial Bus (USB) Wired high speed bus
Intel, Microsoft, IBM, Compaq, Digital and Northern Telecom
togetherproposed this standard.
USB communication system follows a star topology with a USB host
at
the centre and one or more USB peripheral devices connected to
it. os can suppor connec on up o nc us ve o s ave an
other USB hosts.
USB transmits data in packet format. Comunnication is host
initiatedone.
USB host contains a host controller which is responsible for
controllingthe data communication, including establishing
connectivity with USB
slave devices, packetizing and formatting the data. Two
important standards Open Host Control Interface (OHCI) and
Universal Host Control Interface (UHCI)
-
8/3/2019 Embedded System Design-Presentation
82/120
-
8/3/2019 Embedded System Design-Presentation
83/120
USB cable is used to establish physical connectionbetween host
and other devices.
USB cable supports communication upto 5 meters.
USB standard uses two different types of connector at.
Type A connector is used for upstream connection(connection with
host) and Type B is used fordownstream connection (connection with
slave)
Type A connector is used with PCs and Laptops.
Both Type A and Type B contain 4-pins forcommunication.
-
8/3/2019 Embedded System Design-Presentation
84/120
Pin no Pin Name Description
1 V Bus Carries power (5V)
2 D- Differential data carrier line
3 D+ Differential data carrier line
4 GND Ground signal line
-
8/3/2019 Embedded System Design-Presentation
85/120
USB uses differential signals for data transmission. It improves
the noise immunity.
USB interface has the ability to supply power to the connecting
devices. It can supply power upto 500mA at5 V.Mini and Micro USB
connectors are available for small form factor devices like
portable media players.
Each USB device contains a product ID (PID) and Vendor ID (VID)
which embedded into the USB chip by theUSB device manufacturer. VID
is supplied by the USB standards forum. PID and VID are essential
for loadingthe drivers corresponding to a USB device for
communication.
USB supports four modes of data transfer:
Control: Used by USB system software to query, configure and
issue commands to the USBdevice
Bulk: Is used for sending block of data to a device. This
supports error checking and correction.Transferring data to a
printer.
Isochronous mode: Used for real data communication. Data
transmitted as stream in real-time. No error-checking allowed.
Audio devices and medical equipments use this.
Interrupt transfer: Used for small amount of data transfer .
Uses polling technique to seewhether the USB device has any data to
send. Mouse and keypad uses this technique .
Four different data rates : Low speed (1.5 Mbps), Full speed (12
Mbps), High speed (480Mbps) andsuper speed (4.8 Gps)
USB1.0 defines Low and Full speed
USB 2.0 and above defines high and super speed.
-
8/3/2019 Embedded System Design-Presentation
86/120
IEEE 1394 (Firewire) Wired, isochronous high speed serial
communication bus, also known as High
Performance Serial Bus (HPSB)
Apple carried out this research and standard proposed by IEEE.
Available fromvarious vendors (Firewire from Apple, i.Link from
Sony, Lynx from TI)
Supports peer-to-peer connection and point-to-multipoint
communication
allowing 63 devices to be connected on the bus in a tree
topology. Can support cable length of 15 feet.
Evolution from initial version (1394-1995) to recent version
(1394-2008)
Supports data rate from 400 to 3200 Mbits/sec
Uses differential data transfer
Interface cable supports 3 types of connectors, namely; 4-pin
connector, 6-pinconnector(alpha connector) and 9 pin connector
(beta connector)
6 & 9 pin connectors carry power also to power peripheral
devices. It cansupply unregulated power in the range of 24 to 30
V.
-
8/3/2019 Embedded System Design-Presentation
87/120
Pin Name 4pin 6pin 9pin Description
Power 1 8 Unregualted DC supply, 24 30V
Signal Ground 2 6 Ground connection
TPB- 1 3 1 Diff signal line for signal line B
TPB+ 2 4 2 Diff signal line for signal line B
TPA- 3 5 3 Diff signal line for signal line A
TPA+ 4 6 4 Diff signal line for signal line A
TPA (S) 5 Shield for Diff signal line A. Normally Gnded
TPB(S) 9 Shield for Diff signal line B. Normally Gnded
NC 7 No connection
-
8/3/2019 Embedded System Design-Presentation
88/120
There are two differential data transfer lines A & B
perconnector. In a 1394 cable, normally the differentiallines of A
are connected to B
1394 is a popular communication interface for
connecting embedded devices like Digital camera,,transfer and
storage.
Unlike USB interface ,IEEE 1394 does not require ahost for
communicating between devices. Eg., scannercan be connected to
printer directly.
Data rate supported by 1394 is far higher than the onesupported
by USB 2.0 interface.
-
8/3/2019 Embedded System Design-Presentation
89/120
Infrared (IrDA) Serial, half duplex, line of sight based
wireless technology (used with
TV, VCD etc)
Uses infrared waves of electromagnetic spectrum for transmitting
thedata.
Supports point-to-point and point-to-multipoint
communication.
Typical range 10 cm to I mt. Range can be increased further
byincreasing TX power.
Speed of transmission is from 9600 bps to 16 Mbps
Based on speed five classifications. Serial IR (SIR) 9600bps to
115.2 kbps
Medium IR (MIR)-0.576 Mbps to 1.152 Mbps
Fast IR (FIR)- 4Mbps
very fast IR (VFIR) -16Mbps
Ultra Fast IR (UFIR)-targeted for 100Mbps
-
8/3/2019 Embedded System Design-Presentation
90/120
Tx and Rx are involved in Ir DA communication. LED is the IR
source fortransmission and photodiode at RX used for reception.
Both Tx and Rx will be present in the device known as
Transceiver tohave two-way communication.
Infra-red Data Assocaition is the regulatory body.
IrDA communication has two essential parts; a physical link part
and.of data between devices and protocol part is responsible for
definingthe rules of communication. IrDA specification include the
standardfor both physical link and protocol layer.
The IrDA control protocol contains implementations for physical
layer(PHY), Media Access Control (MAC) and Logical Link Control
(LLC)
IrDA is a popular interface for file exchange and data transfer
in lowcost devices.
-
8/3/2019 Embedded System Design-Presentation
91/120
Bluetooth (BT)
Low cost, low power, short range wireless technology for data
and voice data communication.
Proposed first by Ericsson in 1994
Operates at 2.4 GHz of the Radio Freq spectrum and uses
Frequency Hopping Spread Spectrum(FHSS) technique
Supports data rate of 1 Mbps and 30 feet
Has physical link part and protocol part.
Bluetooth enabled devices essentially contain a Bluetooth
wireless radio for the transmission andreception of data. Rules
governing the Bluetooth communication is implemented in the
Bluetoothprotocol stack. Bluetooth communication IC holds the
stack.
Each Blue tooth device has a 48 bit ID number. Communication
follows packet based transfer.
Supports point-to-point and point-to-multipoint communication.
Master slave communicationmodel is followed. When network is formed
with one bluetooth device as master and more than onedevice as
slaves, it is called Piconet. Piconet supports max of seven slave
devices.
Most widely used with Mobile devices
The Generic Access Profile (GAP) defines the requirements for
detecting a Bluetooth device andestablishing a connection with it.
All other specific usage profiels are based on GAP. Serial Port
Profile
(SPP) for serial communication, File transfer Profile (FTP ) for
file transfer between devices, HumanInterface Device (HID) for
supporting human interface devices like keyboard and mouse.
Blue tooth Special interest group (SIG) defines the
standards.
-
8/3/2019 Embedded System Design-Presentation
92/120
Wi-Fi or Wireless Fidelity Popular communication technique for
networked communication of devices and it supports
Internet Protocol(IP)
It follows IEEE 802.11 standard
As it is requirement of networking devices to have
identification, in wi-fi it is done through IPaddress.
In Wi-Fi routers/access points to manage communication are
needed.
Routers/access points are responsible for restricting the access
to a network, assigning IP,
network
Wi-Fi enables devices contain a wireless adaptor for
transmitting and receiving data in theform of Radio signals through
an antenna.
Wi-Fi operates at 2.4 GHz or 5GHz of radio spectrum
Service Set Identifier (SSID) are used in identifying available
networks. In case of securednetworks password is needed.
Wi-Fi employs different security mechanisms like Wired
Equivalency Privacy (WEP), WirelessProtected Access (WPA) etc.. for
securing the data communication
Supports data rates from 1 Mbps to 150 Mbps depending on the
standards andaccess/modulation method.
Depending on the type of antenna and usage location , Wi-Fi
offers a range of 100-300 feet.
-
8/3/2019 Embedded System Design-Presentation
93/120
-
8/3/2019 Embedded System Design-Presentation
94/120
ZigBee Low power, low cost, woreless network communication
protocol based on the IEEE
802.15.4.2006 standard
Targeted for Wireless Personal Area Networking (WPAN).
ZigBee specifications support a robust mesh network containing
multiple nodes. Thisnetworking strategy makes the network reliable
by permitting messages to travelthrough a number of different paths
to get from one node to another.
Operates worldwide at the unlicenced badns of Radio spectrum.
Supports operating distance up to 100 mts and a data rate of 20 to
250kbps.
ZigBee Coordinator(ZC)/Network Coordinator: This acts as root of
the ZigBee network.It is responsible for initiating the network and
it has the capability to store informationabout the network.
ZigBee Router(ZR)/Full function Device (FFD): Responsible
forpassing informationfromm device to another device or ZR
ZigBee End Device (ZED)/Reduced Function Device (RFD): End
device containing ZigBee
functionality for data communication . It can talk with a ZR or
ZC and doesnt have thecapability to act a mediator for transferring
data from one device to another.
-
8/3/2019 Embedded System Design-Presentation
95/120
ZigBee has wide application areas such as Home & Industrial
automation,
energy management, home control/security, medical/patient
tracking,
logistics & asset tracking and sensor networks & active
RFID
ZigBee alliance manages defining standards
-
8/3/2019 Embedded System Design-Presentation
96/120
General Packet Radio Service (GPRS) GPRS is a communication
technique for transferring data over a mobile
communication network like GSM.
Packet communication is used
GPRS supports a theoretical maximum transfer rate of 171.2
Kbps.
Shared communication is used, i.e., instead of radio channel is
dedicated to
single cell user it shared among many users. Time division
multiplexing is used, i.e., channel is divided into 8 timeslots
and
transmits data over the available channel.
GPRS supports IP, Point to Point Protocol (PPP) and X.25
protocols forcommunication.
GPRS is mainly used by mobile enabled embedded devices for
datacommunication. The device should support the necessary GPRS
hardware like
GPRS modem and GPRS radio. To accomplish GPRS based
communication, the carrier network also should
have support for GPRS communication
EDGE, High Speed Downlink Packet Access (HSDPA) are now
replacing GPRS.
-
8/3/2019 Embedded System Design-Presentation
97/120
Embedded Firmware This refers to the control algorithm
(Program
Instructions) and or the configuration settings than anembedded
system developer dumps into the code
(Program) memory of the embedded system. This isan unavo a e par
o m e e sys em.
Different ways of developing Embedded Firmware are1. Write
program in high level languages like Embedded
C/C++ using an Integrated Development Environment(IDE). IDE will
contain an editor, compiler,l inker, debugger,
simulator etc. IDE is different for different family
ofprocessors. Eg., Keil with 8051 microcontrollers
2. Writing an Assembly level program
-
8/3/2019 Embedded System Design-Presentation
98/120
Process of converting the program written in either a high level
language or processorspecific Assembly code to machine readable
binary code is called HEX File Creation.The methods used for HEX
File Creation is different depending on the programmingtechniques
used.
For a beginner it is always better to use High level language
method, since it is easilyportable. Also programs written in high
level languages are not developer dependent.Any skilled programmer
can trace out the functionalities and do suitable modification
ifsufficient comments and documentation is done.
Debu in time will be ver short.
Assembly language approach is very time consuming and tedious.
Each has their ownstyle of writing. Knowing every instruction of
the processor is not easy.
Two types of control algorithm development are used in practice.
Infinite or loop or super loop approach, where control flow runs
from top to bottom an then
jumps back to the top of the program. It is similar to while (1)
{ } based technique in C.
Second method deals with splitting the function to be executed
into tasks and running thesetasks using a scheduler which is part
of General Purpose or Real Time Embedded Operation
System (GPOS/RTOS)
-
8/3/2019 Embedded System Design-Presentation
99/120
Other System Components
Reset Circuit
Brown-out Protection circuit
Real-Time Clock (RTC)
Watchdog Timer
-
8/3/2019 Embedded System Design-Presentation
100/120
Reset Circuit It is essential to ensure that the device is not
operating at a
voltage level where the device is not guaranteed tooperate,
during system power ON.
The reset signal brings the internal regsiters and the
a known state and starts the firmware execution from thereset
vector.
Reset signal can be active High or Low
Since the processor operation is synchronised to a clock
signal, the reset pulse should be wide enough to give timefor
the clock oscillator to stabilize before the internal resetstate
starts.
-
8/3/2019 Embedded System Design-Presentation
101/120
-
8/3/2019 Embedded System Design-Presentation
102/120
Brown-out Protection Circuit
This circuit prevents the processor/controller fromunexpected
program execution behaviour when thesupply voltage to the
processor/controller falls below a
specified voltage. It is essential for battery powered
devices.
Processor may not behave predictably if voltage falls
belowrecommended voltage. It may lead to data corruption.
A brown-out protection circuit holds the processor
/controller in reset state, when the operating volatge
fallsbelow the threshold, until it rises above the
thresholdvolatge.
-
8/3/2019 Embedded System Design-Presentation
103/120
The Zener diode Dz and transistor Q forms the heart of the
circuit. The transistor
conducts always when the supply voltage Vcc is greater than that
of the sum of VBEand VZ. Moment Vcc drops below this threshold Q
stops conducting. When Q is
ON pulse is in High mode when Q in OFF reset pulse is Low.
-
8/3/2019 Embedded System Design-Presentation
104/120
Oscillator Unit Commonly clock circuit are built on the board.
However, certain
processors/controllers integrate a built-in-oscillator unit and
simplyrequire an external ceramic resonator/quartz crystal for
producing thenecessary clock signals. Quartz crystal and ceramic
resonators areequivalent in operation , however they possess
physical difference.
S eed of the rocessor de ends on the clock fre but this fre
cannotbe blindly increased. The internal gates decides the
threshold.
The total system power consumption is directly proportional to
theclock frequency.
The accuracy of program execution depends on the accuracy of
theclock signal. The accuracy of the crystal oscillator or ceramic
resonator
is normally expressed in terms of +/- ppm(parts per million)
-
8/3/2019 Embedded System Design-Presentation
105/120
-
8/3/2019 Embedded System Design-Presentation
106/120
Real-Time Clock (RTC) RTC is a system component responsible for
keeping track of time. This supplies
timing reference to the system.
RTC is intended to perform in the absence of power.
The RTC chip contains a microchip for holding the time and date
relatedinformation and backup battery cell for functioning in the
absence of power, in
a single IC package. The RTC chip is interfaced to the processor
or controller ofe em e e sys em.
For OS based embedded devices, a timing reference is essential
forsynchronizing the operations of the OS kernel. The RTC can
interrupt the OSkernel by asserting the interrupt line of the
processor/controller to which theRTC interrupt line is connected.
One IRQ can be assigned to the RTC interruptand the kernel can
perform necessary operations like system date timeupdation,
managing software timers etc when an RTC timer tick interrupt
occurs. The RTC can be configured to interrupt the processor at
predefined intervals
or to interpret the processor when the RTC register reaches a
specified value.
-
8/3/2019 Embedded System Design-Presentation
107/120
Watchdog Timer Watchdog timer is responsible to reset the
embedded
system when the execution of program hangs up.
This is a Hardware timer for monitoiring the
firmwareexecution
epen ng on n erna mp emen a on , e wa c ogtimer increments or
decrements a free running counterwith each clock pulse
Generates a reset signal to reset the processor if the
countreaches zero incase of decrement counter or highest value
in case of up-counter. Firmware can initialize the watchdog
counter before the
start of execution
-
8/3/2019 Embedded System Design-Presentation
108/120
If the firmware execution doesnt complete due to
malfunctioning,within the time required by the watchdog to reach
the maximumcount, the counter will generate a reset pulse and this
will reset theprocessor. If the program completes the execution
then watchdogcounter can be loaded with 0 (up counter)
Most of the processors implements this as built-in component
and
provides status register to control the watchdog timer and
watchdogtimer register for writing the count value.
Some processors have this as external circuitry also. The
hardware/logic takes care of generating necessary enabling,
disabling, countincrement/decrement and reset generation
The Microprocessor supervisor IC DS1232 integrates a
hardwarewatchdog timer in it.
Interrupt can also be generated instead of reset and interrupt
handlercan be programmed to handle the situation.
-
8/3/2019 Embedded System Design-Presentation
109/120
-
8/3/2019 Embedded System Design-Presentation
110/120
PCB and Passive Components
PCB is the backbone of every Embedded System
Along with ICs responsible for executing required
logic etc. there are passive components likeresistors,
capacitors supporting the whole system.
There are many subsystems like circuit responsiblefor supplying
regulated (ripple free) power supply,spike suppressors etc which
are of equalimportance in defining performance of thesystem.
Characteristics and Quality Attributes
-
8/3/2019 Embedded System Design-Presentation
111/120
Characteristics and Quality Attributes
of Embedded System Characteristics of an Embedded System
1. Application and domain specific-designed for one application
cannot be used for other
2. Reactive and Real Time- responding to input and that to too
quickly
3. Operates in harsh environments-dusty, high temperature
andvibration full atmosphere
. s r u e - ar rea ng, ransac ons, money coun er antransaction
printer in ATM are independent embedded systems.Coffee vending
machine has card reader and vending unit which areseparate ES.
Supervisory Control and Data Acquisition (SCADA)
5. Small size and weight-Small is comfortable, compact and easy
tomaintain
6. Power concerns-devices consuming less power, devices with
lowpower technology
-
8/3/2019 Embedded System Design-Presentation
112/120
-
8/3/2019 Embedded System Design-Presentation
113/120
Quality Attributes of Embedded System
These are the non-functional requirements that
need to be documented properly in any system
desi n. More concrete and measurable has better impact
on system development process.
1. Operational Quality Attributes
2. Non-Operational Quality Attributes
-
8/3/2019 Embedded System Design-Presentation
114/120
Operational Quality Attributes
Represents the relevant quality attributes related to the
embedded system when it is in the operational mode
or online mode
. esponse- easure o qu c ness
2. Throughput- No. of products, no. of transactions over a
fixed time, Measured in terms of Benchmark
3. Reliability- percentage of reliance of proper functioning
or
what is the susceptibility of the system for failure, Mean
Time Between Failures (MTBF) and Mean Time BetweenRepair (MTTR)
are used in expressing above.
-
8/3/2019 Embedded System Design-Presentation
115/120
4. Maintainability- Reliability and Maintainability are
complementary.Maintainability is closely related to system
availability. Two categories
Scheduled or Periodic Maintenance, Maintenance to
unexpectedfailures Eg: Printer
5. Security Confidentiality Integrity and Availability.
Confidentialitydeals with protection of data and application from
unauthorizeddisclosure. Integrity deals with protection of data and
application from
unauthorized modification. Availability deals with protection of
data. .(PDA). In case of shared one PDA is operated and available
toindividual through password, this is Availability. Not all data
isaccessible to everyone. Administrator defined security is used.
ThisConfidentiality. Data available to users can only be seen but
notalterable this is Integrity
6. Safety This is possible damage to the operators, public
andenvironment due to the breakdown or emission of
dangerousradioactive or hazardous materials. Breakdown may due to
failure ofhardware or software. Safety analysis should be done
during thedesign.
-
8/3/2019 Embedded System Design-Presentation
116/120
Non Operational Quality Attributes
1. Testability & Debug-ability
2. Evolvability
.
4. Time to prototype and market
5. Per unit and total cost
-
8/3/2019 Embedded System Design-Presentation
117/120
Testability and Debug ability
Ease of testing (both hardware & software)
Debug-ability is a means of debugging the product assuch for
figuring out the probable sources that create
unex ected behaviour in the total s stem. Bothhardware and
software debugging option need to beprovided.
Evolvability
This is referred to as non-heritable variation. It is the
ease with which embedded product can be modified totake the
advantage of new firmware or hardwaretechnologies.
-
8/3/2019 Embedded System Design-Presentation
118/120
Portability
It is a measure of system independence
The ease with which an embedded product can be ported onto a new
platform is a direct measure of the re-workrequired.
Standard embedded product should always be flexible
andportable.
In embedded products, the termporting represents themigration of
the embedded firmware written for one targetprocessor to a
different target processor.
Using high-level language in writing fimrware
improvesportability.
If the firmware is platform independent it is still better.
-
8/3/2019 Embedded System Design-Presentation
119/120
Time-to-Prototype and Market
This is the time elapsed between the conceptualisationof a
product and the time at which the product is readyfor selling or
use.
This time has to be as small as ossible to beat
thecompetition
Delay in making may lead to outdate of the technology.
Prototyping is an informal kind of rapid productdevelopment in
which important features of the
product under consideration are developed. If Prototype is
developed fast time for final product can
be speeded up.
-
8/3/2019 Embedded System Design-Presentation
120/120
Per Unit Cost and Revenue
Product life cycle (PLC) has different stages:
Product development- idea discussion, prototyping, design
and development. This stage has only investment no returns
.Generally low revenue in this stage
Growth This stage product gains high market and revenue
increases
Product Maturity Revenue peaks up in this stage
Product retirement revenue starts declining due tocompetition
from similar products or change in technology