Embed Size (px)
Citation preview

Doha Dec. 2009 1Prof. Dr.-Ing. Jens Onno KrahCologne University of Applied Sciences
Electrical Energy Education and Research
Energy Curriculum
“From Matlab Simulink to Practical Results in Minutes”
Jens Onno Krah
Prof. Dr.-Ing.
Cologne University of Applied Sciences
www.fh-koeln.de [email protected]
Doha Dec. 2009 2Prof. Dr.-Ing. Jens Onno KrahCologne University of Applied Sciences
Introduction: Jens Onno Krah 1
1988 – 1993 Ph.D. – team of Prof. Holtz
1993 – 1996 Post Doc at University Wuppertal
Prof. Joachim HoltzJ. Holtz, J. O. Krah: Adaptive Optimal Pulsewidth
Modulation for the Line-Side Converter of Electric
Locomotives. IEEE Transactions on Power
Electronics (1992), pp. 205-211.

Doha Dec. 2009 3Prof. Dr.-Ing. Jens Onno KrahCologne University of Applied Sciences
Introduction: Jens Onno Krah 2
1996 – 1997 R&D Manager: Seidel Servo Drives
1998 – 2000 R&D Manager: Kollmorgen
2000 – 2004 R&D Manager: Danaher Motion
Danaher Servo Drive
ServoStar 300 Permanent Magnet Motor
Advanced Kollmorgen Motor

Doha Dec. 2009 4Prof. Dr.-Ing. Jens Onno KrahCologne University of Applied Sciences
Introduction: Jens Onno Krah 3
Since 2004: Professor for control theory at the Cologne University
Research: Motor control & digital signal processing with FPGA
Team: 7 Eng. , 2 Master thesis and 14 diploma thesis
8000 eng. Students
~ 90 % Bachelor (diploma)
~ 10 % Master
~ 1 % PH. D. (in Co.)
Engineering Research Center
Cologne University of Applied Sciences

Doha Dec. 2009 5Prof. Dr.-Ing. Jens Onno KrahCologne University of Applied Sciences
www.google.de
Cologne

Doha Dec. 2009 6Prof. Dr.-Ing. Jens Onno KrahCologne University of Applied Sciences

Doha Dec. 2009 7Prof. Dr.-Ing. Jens Onno KrahCologne University of Applied Sciences
Germany: Students are striking7
Diploma -> Bachelor & Master

Doha Dec. 2009 8Prof. Dr.-Ing. Jens Onno KrahCologne University of Applied Sciences
All complex projects are more or less build
by using modular building Blocs (like LEGO)
Integrating Students in Research … break down in small blocks.

Doha Dec. 2009 9Prof. Dr.-Ing. Jens Onno KrahCologne University of Applied Sciences
Building Bloc 1: Computing Algorithms
+ Well known by every student
+ Excellent – floating point – computing power per $
– PC (was) not real time
(Industrial)
Personal
Computer= +
( ) ( )

Doha Dec. 2009 10Prof. Dr.-Ing. Jens Onno KrahCologne University of Applied Sciences
Building Bloc 2: System Modulation and Simulation
+ Fast design entry
+ Excellent simulation
+ Most eng. students learn during their education
+ Real time workshop (with FPU)
– Interface to hardware (was) expensive

Doha Dec. 2009 11Prof. Dr.-Ing. Jens Onno KrahCologne University of Applied Sciences
Building Bloc 3: IGBT Inverter
+ One control card from < 1 kW … > 1 MW
+ 3 ~ closed loop hall current measurement
+ High volume manufacturer
+ Every student can install and set up
– Power stage (was) not free programmable
VLT AutomationDrive

Doha Dec. 2009 12Prof. Dr.-Ing. Jens Onno KrahCologne University of Applied Sciences
Building Bloc 4: the Ethernet Fieldbus
+ Most common Real Time Ethernet for Motion Control
+ Extremely fast (50µs) due to the summing frame structure
+ The EtherCAT slave devices read the data addressed to them while the frame
passes through the node
+ Similarly, input data is inserted while the telegram passes through
+ up to 180 Mbit per second (full duplex fast Ethernet)
Slave Device
EtherCAT Slave
Controller
Slave Device
EtherCAT Slave
Controller

Doha Dec. 2009 13Prof. Dr.-Ing. Jens Onno KrahCologne University of Applied Sciences
Building Bloc 5: I/O Bus Terminal
+ The Beckhoff I/O system supports about 400 Bus Terminals
+ Extremely fast (50µs) due to the EtherCAT interface
+ The Beckhoff Bus Terminals have been tried and tested in a wide range of
sectors worldwide, from machine construction to building management.
+ Beckhoff Bus Terminal technology makes design, wiring and maintenance of
equipment very cost-effective.
• Analog I/O
• Digital I/O
• Encoder interface
• Communication
• …

Doha Dec. 2009 14Prof. Dr.-Ing. Jens Onno KrahCologne University of Applied Sciences
Building Bloc 6: Field Programmable Gate Array (FPGA)
+ Extremely fast due to parallel computing (VHDL)
+ Processing of feedback units: Encoder / Resolver
+ 6 ~ Pulse Width Modulation (PWM)
+ 3–Level Inverter (Wind power – PV)
+ Fieldbus connectivity – EtherCAT IP
+ Handling of SD ADC
– Not much internal RAM
VHDL+
-

Doha Dec. 2009 15Prof. Dr.-Ing. Jens Onno KrahCologne University of Applied Sciences
Building Bloc 7: TwinCAT PC → real-time controller
+ TwinCAT turns almost any compatible PC
into a real-time controller
+ open: utilizes compatible PC hardware
+ embedded IEC 61131-3 software PLC,
software NC and software CNC in
Windows NT/2000/XP/Vista, Windows 7,
NT/ XP Embedded, CE
+ programming and run-time systems
optionally together on one PC or separated
+ data communication with user interfaces and other programs by means of open
Microsoft standards (OPC, OCX, DLL, etc.)
– Version 3.0: direct Matlab Simulink Interface (new)
www.beckhoff.com

Doha Dec. 2009 16Prof. Dr.-Ing. Jens Onno KrahCologne University of Applied Sciences
Building a Motor Control System for University purposes - step 1
1. Take the Altera / EBV Cyclone III evaluation board (www.ebv.de)
2. Take off all parts we do not need (USB, CAN, 24 V I/O, …)
3. Add SD ADC1204 from Texas Instruments
4. Add Danfoss power stage interface
5. Design a PCB with the dimensions of the Danfoss control card
6. Add motor control VHDL IP (PWM, current measuring …)
7. Add EtherCAT (Real Time Ethernet) fieldbus IP
8. Replace the original control card of the frequency inverter
Evaluation Board from EBW FPGA based control board from University Cologne

Doha Dec. 2009 17Prof. Dr.-Ing. Jens Onno KrahCologne University of Applied Sciences
Real Time Ethernet:
Resolver
`PC
Cyclone III C 40
3~
0 – 480 V
Motor
400
Vdc
Avago Avago
230-480 Vac
20
0 -
80
0 V
dc
5 / 15 Vdc
Control LogicPower Supply
Vb
us SD
Motor Current SD
IGBT Signals
Chopper
Ballast Power Stage
Power Supply
Danfoss
JTAG
EMI Filter
Feed-
back
Nio
s II / V
HD
L
Mo
tor C
on
trol
`SRAM
`Flash
`MAC
or
IP
PHY
PHY
sinc3SVMRS 485
or SDFB IP
VHDL
Motor
Control
„C“
Motor
ControlCologne – FPGA Control Board
BLAC
or IM
Doha Dec. 2009 18Prof. Dr.-Ing. Jens Onno KrahCologne University of Applied Sciences
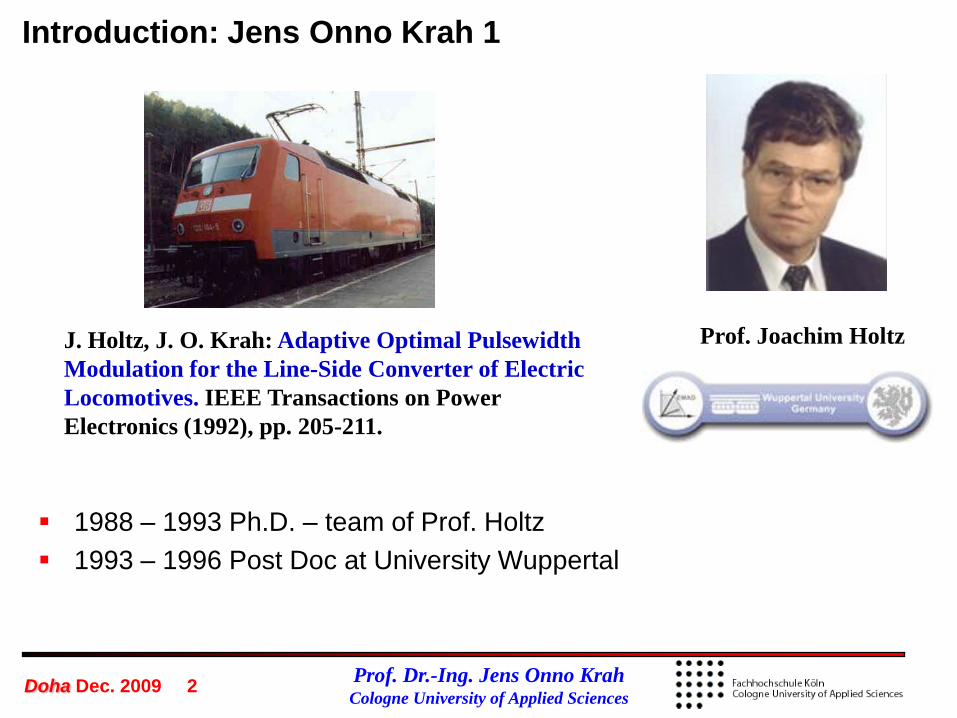
Building a Motor Control System for University purposes - step 2
Hardware Setup
1. Connect motor and drive
2. Connect fieldbus (EtherCAT)
PC: second Ethernet adapter (for example Intel Pro)
3. Connect optional Input, Output & motor feedback
PC (for example Dell) Danfoss Drive with
FPGA control board
from University Cologne
Cat 5Cat 5
Motor (with feedback)
Beckhoff I/O
Doha Dec. 2009 19Prof. Dr.-Ing. Jens Onno KrahCologne University of Applied Sciences
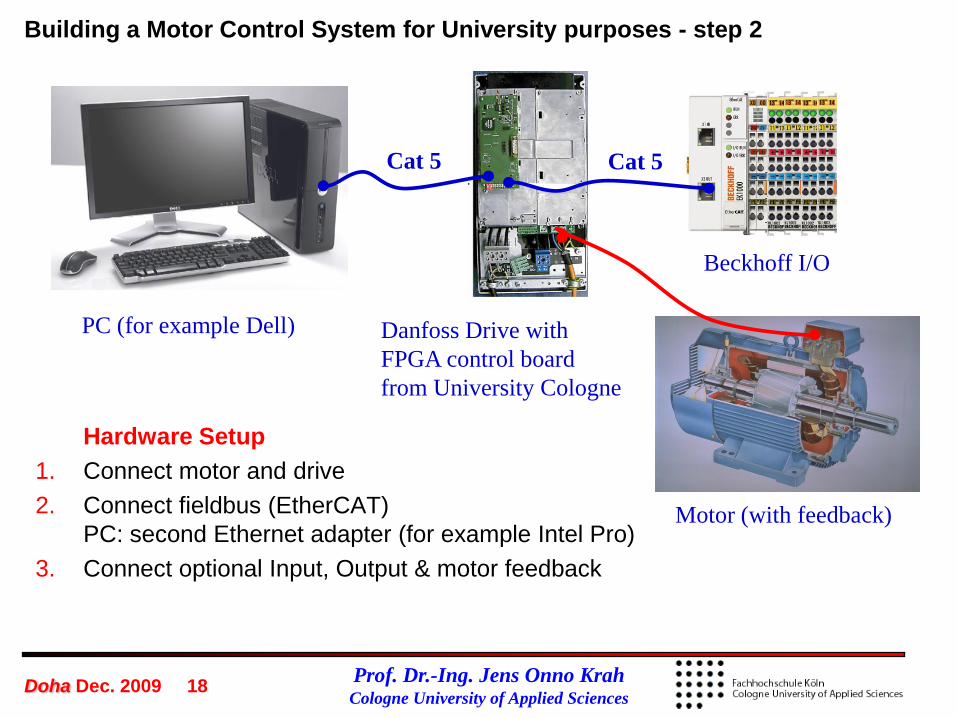
Building a Motor Control System for University purposes - step 3
Software Setup
1. Install TwinCAT
2. Install real time Ethernet adapter driver
3. Configure the system with the TwinCAT System Manager
4. Create control loop software …

Doha Dec. 2009 20Prof. Dr.-Ing. Jens Onno KrahCologne University of Applied Sciences
Building a Motor Control System for University purposes - step 4
Take advantage of the superior development environment
1. On-Line variable read and modify
2. Multi-channel software scope
3. Gflops computing power (Intel CPU)
4. Utilize Microsoft interface standards (OPC, OCX, DLL, etc.)

Doha Dec. 2009 21Prof. Dr.-Ing. Jens Onno KrahCologne University of Applied Sciences
EtherCAT
„Read I/O“
TwinCATControl
Algorithm
RT Task EtherCAT
„Write I/O“
DC Event
Sync
Read: S&H
Write: Latch
D
VHDL
PWM
EtherCAT
„Read I/O“
S&H
XFC EtherCAT Cycle Time (62.5 µs)
Distributed
Clock Offset
8 MHz
Request
Clock Burst
Encoder
Building a Motor Control System for University purposes - EtherCAT Timing

Doha Dec. 2009 22Prof. Dr.-Ing. Jens Onno KrahCologne University of Applied Sciences
Building a Motor Control System for University purposes – Design flow
Real Time
Workshop
Visual C++
TwinCAT
real time Task
TwinCAT
Soft Scope
TwinCAT
IDE
Doha Dec. 2009 23Prof. Dr.-Ing. Jens Onno KrahCologne University of Applied Sciences
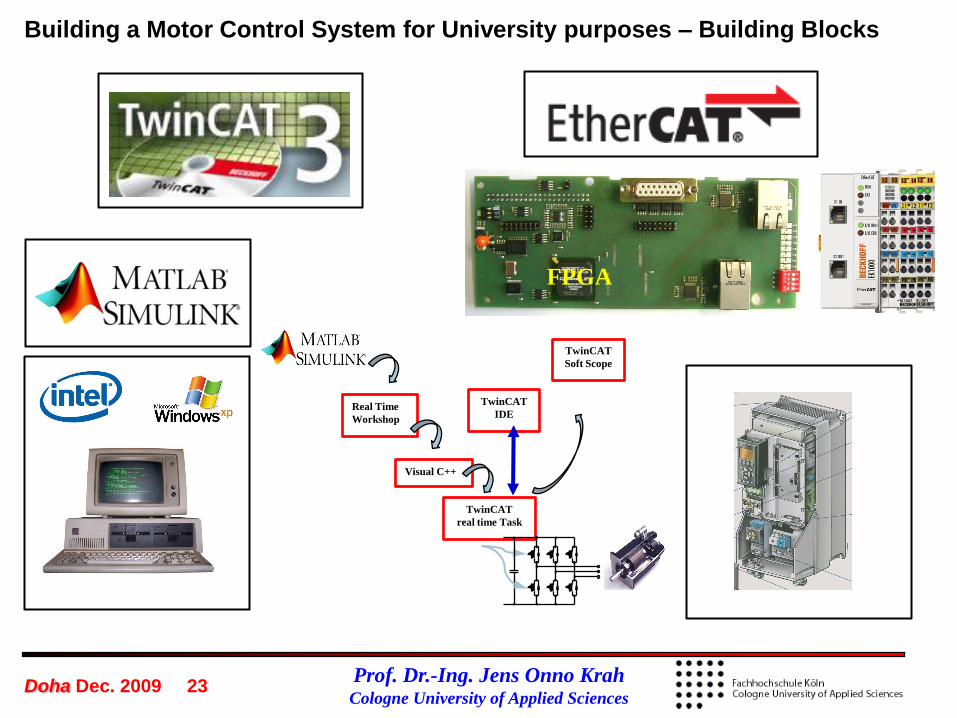
Building a Motor Control System for University purposes – Building Blocks
Real Time
Workshop
Visual C++
TwinCAT
real time Task
TwinCAT
Soft Scope
TwinCAT
IDE
FPGA

Doha Dec. 2009 24Prof. Dr.-Ing. Jens Onno KrahCologne University of Applied Sciences
Automated table soccer
(one side)

Doha Dec. 2009 25Prof. Dr.-Ing. Jens Onno KrahCologne University of Applied Sciences
8 PM motors with PC / FPGA control

Doha Dec. 2009 26Prof. Dr.-Ing. Jens Onno KrahCologne University of Applied Sciences
Build by 3 undergraduate students in 6 month

Doha Dec. 2009 27Prof. Dr.-Ing. Jens Onno KrahCologne University of Applied Sciences
Conclusion:
Standard power electronics with high computing power and Matlab
Simulink tool chain interface
Motor Control is going to be free programmable with reasonable effort
High quality industrial components for reasonable cost
Utilized building blocks:
1. PC technology (Intel CPU + Windows XP)
2. Matlab Simulink
3. Danfoss frequency inverter (power electronics)
4. EtherCAT the real time Ethernet Fieldbus
5. Beckhoff I/O bus terminal technology
6. Field Programmable Gate Array (FPGA) from Altera
7. TwinCAT real time automation software system
The funding of this project was kindly provided by Altera (California),
Beckhoff Automation (Germany) and EBV Elektronik (Germany)
From Matlab Simulink to Practical Results in Minutes

























![ALEXANDRIA UNIVERSITY FACULTY OF …people.qatar.tamu.edu/shehab.ahmed/NSF Presentations...FOURTH YEAR EE&E (POWER & MACHINES SECTION) •FIRST SEMESTER o POWER ELECTRONICS –2 [4+1+1]](https://img.pdfslide.us/doc/110x75/5b064d387f8b9a79538c4095/alexandria-university-faculty-of-presentationsfourth-year-eee-power-machines.jpg)