Embed Size (px)
Citation preview

INTERNATIONAL JOURNAL OF c© 2010 Institute for ScientificINFORMATION AND SYSTEMS SCIENCES Computing and InformationVolume 6, Number 3, Pages 318–332
EFFORT DYNAMICS IN A PREY-PREDATOR MODEL WITHHARVESTING
TAPAN KUMAR KAR AND KUNAL CHAKRABORTY
(Communicated by Guofeng Zhang)
This paper is dedicated to our authors
Abstract. In a fully dynamic model of an open-access fishery, the level of
fishing effort expands or contracts according as the net economic revenue to
the fishermen is positive or negative. A model reflecting this dynamic inter-
action between the net economic revenue and the effort in a fishery is called
a dynamic reaction model. In the present paper we consider a prey-predator
type fishery model with a partial closure of prey species. The steady states of
the systems are determined, and the dynamical behavior of both the species
is examined. The optimal harvest policy is formulated and solved with the
help of Pontryagin’s maximal principle. Results are illustrated with the help
of numerical examples.
Key Words. Prey-predator, dynamic reaction, global stability, bifurcation,
optimal harvesting.
1. Introduction
Major parts of human population in developing countries earn their livelihoodby fishing. But over exploitation of fisheries is a serious and immediate global prob-lem that current management policies struggle to solve. Scientists and researchersconsider that new strategies based on a long term approach are necessary for futurefisheries management and sustainable development of ecosystem. One potentialsolution to these problems is the creation of marine reserves in which fishing isrestricted. The implementations of marine reserve areas can protect and enhancethe stock biomass by protect the species inside the reserve area and increase fishabundance in adjacent areas. From several economic researches it is noted thateconomists in general underline different problems of fisheries management andprovide the solution as implementation of marine reserve. According to them ma-rine reserve must be seen as one of the many tools of fisheries management and thehow, where and for what fisheries, reserves are implemented is of great concern.The migration rates of the stock biomass between the protected and unprotectedareas provide the way to recover the exploited stock and thus enhance the stockbiomass.
The use of MPAs is directed towards ecosystem functioning where ecosystemsare easily disrupted by fishing efforts, reserves may be a more appropriate option.For the two fisheries as a whole, the creation of certain size protected areas can
Received by the editors May 9, 2010.2000 Mathematics Subject Classification. 34K20, 92D25.
318

EFFORT DYNAMICS IN A PREY-PREDATOR MODEL WITH HARVESTING 319
yield some benefits in terms of overall harvest and resource rent. Conard (1999)observed two possible benefits from the creation of the protected area. First, theoverall variation in biomass and as such harvest; and second, it may reduce thecosts of management mistakes. Dixon (1993) shown that the objectives of creationof a marine protected area can lead to conflicts between the various economic agentsinvolved with the area.
The study of the population dynamics in harvesting is a subject of mathemati-cal bio-economics, which in turn related to the optimal management of renewableresources (Clark, 1990). Kar and Misra (2006) examined the existence of possiblesteady states along with their local and global stability in a prey-predator fisherywith prey reserve. They also examined the possibilities of existence of bionomicequilibrium and provide the optimal harvesting strategy using Pontryagin’s maxi-mum principle. Kar and Chaudhuri (2003), investigated a dynamic reaction modelin the case of a prey-predator type fishery system, where only the prey species issubjected to harvesting, taking taxation as a control instrument. In this paper theycritically compare the uniqueness of their developed model with other researcherslike Chaudhuri and Johnson (1990); Ganguly and Chaudhuri (1995); Anderson andLee (1986); Krishna et al. (1998) and Pradhan and Chaudhuri (1999). Kar andMatsuda (2006) investigated a prey-predator model with Holling type of predationand harvesting of mature predator species. From the study it is evident that usingthe harvesting effort as control, it is possible to break the cyclic behavior of thesystem and drive it to a required steady state.
A generalized predator-prey system with exploited terms and the existence ofeight positive periodic solutions was studied by Zhanga and Tianb (2008). Herethe continuation theorem of coincidence degree theory was used. A Lotka-Volterrapredator-prey system with a single delay was used by Yan and Zhang (2008) in theirinvestigation. Here investigation was carried out on the delay as the bifurcationparameter, analysis of the characteristic equation of the linear system, the linearstability of the system etc. and Holf bifurcations were demonstrated. Kar and Mat-suda (2007) was also studied a harvested prey-predator system with Holling typeIII response function. Here the effect of harvesting efforts on the prey-predator sys-tem was analyzed. The combined harvesting of two competing species was studiedin detail by Chaudhuri (1986 & 1988). Although various models on single speciesfisheries have so far been developed in the fisheries literature but adequate litera-ture in multispecies fisheries is still limited. Mesterton-Gibbers (1987) reported themultispecies harvesting models.
Hannesson (2002) suggested that even if all rents disappear by assumption, it ispossible to identify this is an economic benefit, particularly when the average catchincreases. The variability of the catch falls for a range of values of the popula-tion migration parameter and variability of growth. Hannesson (1998) investigatedwhat would happen to fishing outside the marine reserve and to the stock size inthe entire area as a result of establishing a marine reserve. Three regimes werecompared: (1) open access to the entire area; (2) open access to the area outsidethe marine reserve and (3) optimum fishing in the entire area. The dynamics ofa fishery resource system in an adequate environment which consists of two zonessuch as a free fishing zone and a reserve zone where fishing is strictly prohibitedwas studied by Kar (2006) using a non-linear mathematical model.

320 T.K.KAR AND K. CHAKRABORTY
2. The model and its qualitative properties
Our study is mainly concerned with a prey-predator system, the ecological setup of which is as follows. There is a prey which is harvested continuously. There isa predator, living on the prey and it is assumed that the predator is not harvestedand hence harvesting does not affect the growth of the predator population directly.However, there is a conflict for common resource i.e. prey between predators andharvesting agency though the predators have competition among themselves fortheir survival. The growth of prey is assumed to be logistic. Let us assume x andy are respectively the size of the prey and predator population at time t. Keepingthese in view, the model becomes
dx
dt= rx
(1− x
K
)− αxy
a + x− h(t),(1.1)
dy
dt= −dy +
βαxy
a + x− γy2,(1.2)
where r is the intrinsic growth rate of the prey, K is the environmental carryingcapacity of prey, α is the maximal relative increase of predation, a is Michaelis-Menten constant, h(t) is the harvesting at time t, d is the death rate of predator, βis conversion factor (we assume 0 < β < 1, since the whole biomass of the prey isnot transformed to the biomass of the predator). Density dependent mortality rateγy2 describes either a self limitation of consumers or the influence of predation. Selflimitation can occur if there is some other factor (other than food) which becomeslimiting at high population densities.
Traditionally, predation term is taken as αxy but due to the fact that predationtends to infinity as prey population goes to infinity with finite and fixed predatorpopulation we consider the predation term as αxy/(a + x) (Holling,1965). Here wepoint out that
limx→∞
αxy
a + x= αy.
Harvesting has a strong impact on the dynamic evaluation of a population subjectedto it. First of all, depending on the nature of the applied harvesting strategy, thelong run stationary density of population may be significantly smaller than the longrun stationary density of a population in the absence of harvesting. Therefore, whilea population can in the absence of harvesting be free of extinction risk, harvestingcan lead to the incorporation of a positive extinction probability and therefore,to potential extinction in finite time. Secondly, if a population is subjected to apositive extinction rate then harvesting can drive the population density to a dan-gerously low level at which extinction becomes sure no matter how the harvesteraffects the population afterwards.
Thus, the study of population dynamics with harvesting is a very interesting subjectof mathematical bioeconomics. Therefore, our objective is to provide some resultswhich are theoretically beneficial to maintaining the sustainable development of theprey-predator system as well as keeping the economic interest of harvesting at anideal level.
We take the harvest rate h(t) in the form
(2) h = mqxE,

EFFORT DYNAMICS IN A PREY-PREDATOR MODEL WITH HARVESTING 321
where q is the catchability co-efficient, E is the effort used to harvest the populationand m(0 < m < 1) is the fraction of the stock available for harvesting.
Let us extend the model system (1), assuming that fishery effort itself is a dy-namic variable that satisfies
(3)dE
dt= λ(pmqx− c)E,
where c is the constant fishing cost per unit effort, p is the constant price per unitbiomass of landed fish and λ is stiffness parameter.
Thus,the final model becomes
dx
dt= rx
(1− x
K
)− αxy
a + x−mqxE,(4.1)
dy
dt= −dy +
βαxy
a + x− γy2,(4.2)
dE
dt= λ(pmqx− c)E,(4.3)
with initial conditions x(0) ≥ 0, y(0) ≥ 0, E(0) ≥ 0.
3. Boundedness, boundary equilibria and stability of the system
Boundedness of a model guarantees its validity. The following theorem estab-lishes the uniform boundedness of the model system (4).
Theorem 1. All the solutions of the model system (4) which start in <3+ are
uniformly bounded.
Proof. Let x(0) ≥ 0, y(0) ≥ 0, E(0) ≥ 0 be any solution of the system with positiveinitial conditions.Now we define the function W = x +
y
β+
E
λp.
Therefore, time derivative gives
dW
dt=
dx
dt+
1β
dy
dt+
1λp
dE
dt
= rx
(1− x
K
)− αxy
a + x−mqxE − d
βy +
αxy
a + x− γ
βy2 + mqxE − c
pE
= rx− r
Kx2 − d
βy − γ
βy2 − c
pE.
Now for each v > 0, we have
dW
dt+ vW = rx− r
Kx2 − d
βy − γ
βy2 − c
pE + vx +
v
βy +
v
λpE.
Taking v = λc, we getdW
dt+ vW ≤ u,
where u =rK
4
(1 +
v
r
)2
+γ
4β
(d
γ+
v
γ
)2
.

322 T.K.KAR AND K. CHAKRABORTY
Applying the theory of differential inequality (Birkoff and Rota, 1982), we obtain
0 ≤ W (x, y, E) ≤ u
v+
W (x(0), y(0), E(0))evt
and for t →∞, 0 ≤ W ≤ u
v.
Thus, all the solutions of the system (4) enter into the region
B ={
(x, y, E) : 0 ≤ W ≤ u
v+ ε, for any ε > 0
}.
This completes the theorem.
In the following lemma we have mentioned the boundary equilibria and their sta-bility of the system (4) and the condition of existence of them.
Lemma 1. System (4) always have two boundary equilibrium points P0(0, 0, 0)and P1(K, 0, 0). The third boundary equilibrium point P2(x, 0, E) exists if and onlyif c < Kmpq. When this condition is satisfied, x and E are given by x =
c
mpqand
E =r(Kmpq − c)
Km2pq2.
At P0(0, 0, 0) we find the characteristic equation as
µ3−(r−d−cλ)µ2−(dr−cdλ+crλ)µ−cdrλ = 0, the roots of which are−d, r and−cλ.
So,P0(0, 0, 0) is unstable.
At P1(K, 0, 0), the characteristic equation is
((−c + Kmpq)λ− µ)(
dr − Krαβ
a + K+ dµ + rµ− Kαβµ
a + K+ µ2
)= 0,
the roots of which are −r,−d +Kαβ
a + Kand (−c + Kmpq)λ.
Consequently,P1(K, 0, 0) is locally asymptotically stable if Kαβ < d(a + K) andc < Kmpq.
At P2(x, 0, E), the characteristic equation is(− d +
xαβ
a + x− µ
)(Em2pq2xλ +
rxµ
K+ µ2
)= 0,
the roots of which are −d +xαβ
a + x, µ1 and µ2.
We observe that µ1 + µ2 = −rx
K< 0 and µ1µ2 = Em2pq2xλ, therefore, P2(x, 0, E)
is locally asymptotically stable ifx
a + x<
d
αβ.
4. The interior equilibrium point: existence and stability
Lemma 2. The interior equilibrium point P3(x∗, y∗, E∗) of the system (4) exists ifcαβ > cd + admpq, m > c/Kpq and d > αβ. When these conditions are satisfiedx∗, y∗ and E∗are given by

EFFORT DYNAMICS IN A PREY-PREDATOR MODEL WITH HARVESTING 323
x∗ =c
pmq, y∗ =
cαβ − cd− admpq
(c + ampq)γand E∗ =
r(Kmpq − c)Km2pq2
+pα(admpq + c(d− αβ))
(c + ampq)2γ.
The characteristic equation at P3(x∗, y∗, E∗) is given by
f(µ) = µ3 + a1µ2 + a2µ + a3 = 0,
where a1 = γy∗ +rx∗
K− αx∗y∗
(a + x∗)2,
a2 =γrx∗y∗
K+
aα2βx∗y∗
(a + x∗)3− αγx∗y∗2
(a + x∗)2+ E∗m2pq2x∗λ,
a3 = E∗γm2pq2x∗y∗λ.
We find that a1 > 0 if γ >αB1K
(B1K + r)(a + x∗)2,
where B1 =cαβ − cd− admpq
(c + ampq).
Let ∆ = a1a2 − a3.
Therefore, ∆ =(
B1 + B4 − B5B1
γ
)(B1B4 +
B6B1
γ− B5B
21
γ+
(B2 +
B3
γ
)B7
)
−B1B7
(B2 +
B3
γ
),
where B2 =r(Kmpq − c)
Km2pq2, B3 =
pα(admpq + c(d− αβ))(c + ampq)2
, B4 =rx∗
K, B5 =
αx∗
(a + x∗)2,
B6 =aα2βx∗
(a + x∗)3and B7 = m2pq2x∗λ.
After a little simplification we get ∆ =B8γ
2 + B9γ + B10
γ2,
where B8 = B21B4 + B1B
24 + B2B4B7,
B9 = B21B6 + B1B4B6 + B3B4B7 −B2
1B4B5 −B31B5 −B2
1B4B5 −B1B2B5B7,
B10 = B31B2
5 −B21B5B6 −B1B3B5B7.
Now we have the following theorem which ensures the local stability of P3(x∗, y∗, E∗).
Theorem 2. If P3(x∗, y∗, E∗) exists with γ >αB1K
(B1K + r)(a + x∗)2and B8γ
2 +
B9γ + B10 > 0, then P3(x∗, y∗, E∗) is locally asymptotically stable.
Proof. The condition γ >αB1K
(B1K + r)(a + x∗)2implies that a1 > 0. a3 is al-
ways positive. Finally, B8γ2 + B9γ + B10 > 0 implies that ∆ = a1a2 − a3 > 0.
Hence by Routh Hurwitz criterion, the theorem follows.
Theorem 3. Let us define ρ(x) =r
K− αy∗
(a + x)(a + x∗)and assume that the
positive equilibrium is locally stable. If ρ(0) > 0, then the positive equilibrium is

324 T.K.KAR AND K. CHAKRABORTY
globally asymptotically stable.
Proof. To show the global stability of system (4) let us construct a suitable Lya-punov function. We define a Lyapunov function
V (x, y, E) = L1
∫ x
x∗
u− x∗
udu + L2
∫ y
y∗
v − y∗
vdv + L3
∫ E
E∗
w − E∗
wdw,
where L1, L2 and L3 are positive constants to be determined in the subsequentsteps. It can be easily verified that the function V is zero at the equilibriumP3(x∗, y∗, E∗) and is positive for all other positive values of x, y and E.
The time derivative of V along the trajectories of (4) is
dV
dt= L1(x− x∗)
[r
(1− x
K
)− αy
a + x−mqE
]+ L2(y − y∗)
(− d +
βαx
a + x− γy
)
+ L3λ(E − E∗)(pmqx− c)
= L1
[− r
K+
αy∗
(a + x)(a + x∗)
](x− x∗)2 +
1(a + x)
[− L1α + L2
βαa
(a + x∗)
](x− x∗)(y − y∗)
+ [−L1mq + L3pmq](x− x∗)(E − E∗) + L2[−γ](y − y∗)2.
Choosing L1 = 1 and L2 =ampq + c
aβpmqand L3 =
1p, a little algebric manipulation
yeilds
dV
dt=
[− r
K+
αy∗
(a + x)(a + x∗)
](x− x∗)2 − γL2(y − y∗)2.
The coefficient of (y − y∗)2 is always negative. The coefficient of (x− x∗)2 is
−ρ(x) = − r
K+
αy∗
(a + x)(a + x∗)
≤ − r
K+
αy∗
a(a + x∗)= ρ(0)
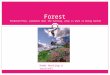
Thus if ρ(0) > 0, then dV/dt < 0 and dV/dt = 0 if and only if x = x∗, y = y∗ andE = E∗.This completes the proof.
The following plot of ρ(x) indicates that ρ(0) > 0, for some parameter values.So the assumption makes some sense.

EFFORT DYNAMICS IN A PREY-PREDATOR MODEL WITH HARVESTING 325
0 5 10 15 20 25 303
3.5
4
4.5
5
5.5
6
6.5
7
7.5
8x 10
−3
x
ρ(x)
Figure1. Variation of ρ(x) with the size of the prey population corresponding tothe numerical values r = 0.9,K = 100, q = 0.009, d = 0.004, a = 10, α = 0.2, β =0.2, γ = 0.01, λ = 1, p = 10, c = 2 and m = 0.450997.
Remark Again, the condition of global stability reduces to
γ >Kαpmq(cαβ − cd− admpq)
ar(c + ampq)2= γ0(say).
Once the positive equilibrium is locally stable, the predator intraspecific compe-tition γ; plays an important role on its global stability. When γ crosses γ0, thepositive equilibrium becomes unstable and a Hopf bifurcation may occur.
5. Bifurcation analysis
Prey-predator models with constant parameters are often found to approach asteady state in which the species coexist in equilibrium. But if parameters used inthe model are changed, other types of dynamical behavior may occur and the criti-cal parameter values at which such transitions happen are called bifurcation points.
When a stable steady state goes through a bifurcation will in general either loseits stability or disappear entirely. Even if the system ends up in another steadystate the transition to that state will often involve the extinction of one or morelevels of the food chain. On the other hand the entire system may survive in a non-stationary state, but further bifurcation may lead to local extinction of species.In order to preserve the system under consideration in its natural state, crossingbifurcation should be avoided and in doing so it is of great importance to determinethe critical parameter values at which bifurcation occur.
Liu (1994) derived a criterion of Hopf bifurcation without using the eigenvaluesof the variational matrix of the interior equilibrium point. We specify below theresult for the current purposes.
Liu’s criterion. If the characteristic equation of the interior equilibrium point isgiven by λ3+a1(φ)λ2+a2(φ)λ+a3(φ) = 0, where a1(φ), a3(φ),∆(φ) = a1(φ)a2(φ)−a3(φ) are smooth functions of φ in an open interval about φ∗ ∈ < such that
(i)a1(φ∗) > 0,∆(φ∗) = 0, a3(φ∗) > 0

326 T.K.KAR AND K. CHAKRABORTY
(ii)(
d∆dφ
)
φ=φ∗6= 0,
then a simple Hopf bifurcation occurs at φ = φ∗.
Now we analyse the bifurcation of the model system assuming γ as the bifurca-tion parameter.
Theorem 4. If P3(x∗, y∗, E∗) exists with γ >αB1K
(B1K + r)(a + x∗)2andB10 < 0,
then a simple Hopf bifurcation occurs at the unique positive value
γ = γ∗ =−B9 +
√B2
9 − 4B8B10
2B8.
Proof. The characteristic equation of P3(x∗, y∗, E∗) is given by
µ3 + a1(γ)µ2 + a2(γ)µ + a3(γ) = 0.
We observe that a3 > 0 for all positive values of γ.
Now ∆(γ) = a1(γ)a2(γ) − a3(γ) =B8γ
2 + B9γ + B10
γ2and it is easy to see that
∆(γ∗) = 0.
Furthermore,(
d∆dγ
)
γ=γ∗= −B9
γ2− 2B10
γ3=
√B2
9 − 4B8B10
2B8> 0.
Hence, by Liu’s criterion, the theorem follows.
Remark Since ∆(γ∗) = 0 and (d∆/dγ)γ=γ∗ > 0, ∆(γ) > 0 for γ > γ∗ andaccording to the Routh Hurwitz criterion, P3(x∗, y∗, E∗) is locally asymptoticallystable for γ > γ∗. Furthermore, according to the criterion a simple Hopf bifurcationoccurs at γ = γ∗ and for decreasing 0 < γ < γ∗, it approaches a periodic solution.
6. Optimal Harvesting Policy
In commercial exploitation of renewable resources the fundamental problem fromthe economic point of view, is to determine the optimal trade-off between presentand future harvests. If we look at the problem it is observed that the marine fisherysectors become more important not only for domestic demand but also from theimperatives of exports.
In this section our objective is to maximize the total discounted net revenues fromthe fishery. Symbolically our strategy is to maximize the present value J given by
(5) J =∫ ∞
0
e−δt(pmqx− c)Edt
where δ is the instantaneous annual discount rate.
Now we wish to find out the path traced out by (x(t), y(t), E(t)) with the opti-mal fraction m so that if prey predator populations and the harvesting effort arekept along this path, then the regulatory authority will be assumed to achieve itsobjective.

EFFORT DYNAMICS IN A PREY-PREDATOR MODEL WITH HARVESTING 327
The problem (5), subject to population equations (4) and control constraints mmin ≤m ≤ mmax, can be solved by applying Pontryagin’s maximum principle.
The Hamiltonian of this control problem is
H = (pmqx− c)E + λ1
[rx
(1− x
K
)− αxy
a + x−mqxE
]+ λ2
[− dy +
βαxy
a + x− γy2
]
+ λ3[λ(pmqx− c)E]
where λ1(t), λ2(t) and λ3(t) are the adjoint variables. The Hamiltonian must bemaximized for m ∈ [mmin,mmax]. Assuming that the control constraints are notbinding (i.e. the optimal solution does not occur at mmin or mmax), we havesingular control (Clark, 1990) given by
(6)∂H
∂m= pqxE − λ1qEx + λ3pqExλ = 0.
We intend to derive here an optimal equilibrium solution of the problem. Since weare considering an equilibrium solution, x, y and E are to be treated as constantsin the subsequent steps. Now the adjoint equations are
dλ1
dt= δλ1 − ∂H
∂xdλ1
dt= δλ1−
[pmqE + λ1
(r − 2xr
K− aαy
(a + x)2−mqE
)+ λ2
(aαβy
(a + x)2
)(7)
+λ3pmqEλ
],
dλ2
dt= δλ2 − ∂H
∂y
dλ2
dt= δλ2−
[λ1
(− αx
a + x+ λ2
(− d +
αβx
a + x− 2γy
)],(8)
dλ3
dt= δλ3 − ∂H
∂Edλ3
dt= δλ3 − [(pmqx− c)− λ1mqx + λ3(pmqx− c)λ],(9)
Let us solve the adjoint equations(7),(8)and(9), we get
(10) λ1 =pmqE∗ + 1
δ (pmqx∗ − c)λpmqE∗(
δ − αx∗y∗(a+x∗)2 + rx∗
K + aα2x∗βy∗(a+x∗)3(δ+γy∗) + λpm2q2x∗E∗
δ
) = A1(say)
(11) λ2 = − αx∗
(a + x∗)(δ + γy∗)A1,
(12) λ3 =1δ[(pmqx∗ − c)−A1mqx∗].
From the equations(6),(10)and(12),we get the singular path as follows:
(13) [(pqx− c)−A1mqx]λpqxE −A1δqEx = 0.
Let m∗ be a solution (if it exists) of (13). Using this value of m∗ in Lemma 2 weobtain the optimal equilibrium solution.

328 T.K.KAR AND K. CHAKRABORTY
Thus we have established the existence of an optimal equilibrium solution thatsatisfies the necessary conditions of the maximum principle.
7. Numerical examples
As the problem is not a case study, the real world data are not available for thismodel. We, therefore, take here some hypothetical data with the sole purpose ofillustrating the results that we have established in the previous sections.
In order to ensure the existence of bifurcation let us consider the parameters ofthe system as m = 0.5, r = 0.8, q = 0.1, d = 0.001, a = 10, α = 0.75, β = 0.75,K =100, λ = 1, p = 10, c = 2.
0 200 400 600 800 10000
20
40
60
80
100
120
140
160
180
200
t
x,y
& E
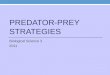
Figure2. Solution curves of prey popula-tion, predator population and fishing ef-fort with the increasing time when γ =0.0827341.
05
1015
2025
0
10
20
300
50
100
150
200
xy
E
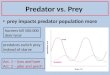
Figure3. Phase plane trajectories ofbiomass and fishing effort beginningwith different initial levels when γ =0.0827341.
0 200 400 600 800 10000
20
40
60
80
100
120
140
160
180
200
t
x,y
& E
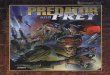
Figure4. Solution curves of prey popula-tion, predator population and fishing ef-fort with the increasing time when γ =0.0727341.
05
1015
2025
0
10
20
300
50
100
150
200
xy
E
Figure5. Phase plane trajectories ofbiomass and fishing effort beginningwith different initial levels when γ =0.0727341.

EFFORT DYNAMICS IN A PREY-PREDATOR MODEL WITH HARVESTING 329
0 200 400 600 800 10000
20
40
60
80
100
120
140
160
180
200
t
x,y
& E
Figure6. Solution curves of prey popula-tion, predator population and fishing ef-fort with the increasing time when γ =0.0527341.
0
10
20
30
0
10
20
300
50
100
150
200
xy
E
Figure7. Phase plane trajectories ofbiomass and fishing effort beginningwith different initial levels when γ =0.0527341.
If we consider the value of γ = 0.0827341 then it is observed from the Figure2&3 that P3(x∗, y∗, E∗) is locally asymptotically stable and the populations x, yand fishing effort E converge to their steady states in finite time. Now if we gradu-ally decrease the value of γ, keeping other parameters fixed, then by Theorem 4 wehave got a critical value γ∗ = 0.0727341 such that P3(x∗, y∗, E∗) loses its stabilityas γ passes through γ∗. Figures 4&5 clearly show the result. It is also noted thatif we consider the value of γ = 0.0527341, then it is evident from Figures 6&7 thatthe positive equilibrium P3(x∗, y∗, E∗) is unstable and there is a periodic orbit nearP3(x∗, y∗, E∗).
Example1 In order to ensure the existence of the optimal equilibrium we usethe following values:r = 0.9, K = 100, q = 0.009, d = 0.004, a = 10, α = 0.2, β = 0.2, γ = 0.01, λ =1, δ = 0.01, p = 10, c = 2.Using these parameter values from optimal harvesting policy we have found theoptimal value of m = 0.450997 and the corresponding optimal equilibrium is(49.2736, 2.92516, 110.045).

330 T.K.KAR AND K. CHAKRABORTY
0 10 20 30 40 500
20
40
60
80
100
120
140
160
180
t
x,y
& E
Prey biomassPredator biomassFishing effort
Figure8. Solution curves of prey,predatorpopulations and fishing effort with the in-creasing time when m = 0.450997.
020
4060
80100
0
20
40
600
50
100
150
200
250
xy
E
Figure9. Phase plane trajectories ofbiomass and fishing effort beginning withdifferent initial levels when m = 0.450997.
Example2 In this example we use the parameter values as:r = 0.3,K = 100, q = 0.0015, d = 0.032, a = 15, α = 0.45, β = 0.45, γ = 0.05, λ =3, δ = 0.01, p = 8, c = 0.5.Using these parameter values from optimal harvesting policy we have found theoptimal value of m = 0.890635 and the corresponding optimal equilibrium is(46.7831, 2.42672, 106.273).
0 20 40 60 80 1000
20
40
60
80
100
120
140
160
180
t
x,y
& E
Prey biomassPredator biomassFishing effort
Figure10. Solution curves of prey, preda-tor populations and fishing effort with theincreasing time when m = 0.890635.
020
4060
80100
0
10
20
300
50
100
150
200
xy
E
Figure11. Phase plane trajectories ofbiomass and fishing effort beginning withdifferent initial levels when m = 0.890635.
8. Concluding remarks
This paper deals with a prey-predator type fishery model with subject to preyharvesting only. One real example is the Antarctic krill whale fishery. While thereis a moratorium on the killing of whales, the Antarctic krill population is beingincreasingly harvested over the recent years. As the krill population is the mainsource of food for whale, large krill catches are bound to affect the growth of boththe krill and whale populations. So it is necessary to control krill harvesting by

EFFORT DYNAMICS IN A PREY-PREDATOR MODEL WITH HARVESTING 331
introducing some regulatory mechanism. Imposition of a reserve is applied on krillharvesting.
As stated above, we have adopted reserve as a controlling instrument to regulateharvesting of prey. We have derived suitable policies for reserve. The model also in-corporates a fully dynamic interaction between the fishing effort and the perceivedrent. In the optimally managed fishery, marine reserve may or may not increasefisheries rent. In many cases, marine reserves of any size would not be optimal atall. When positively sized marine reserves would be optimal, the introduction ofmarine reserves may or may not increase fisheries rents, depending on whether theactual size of marine reserves is sufficiently close to the optimal or not.
It is important to realize that even when marine reserves of a certain size areoptimal, their actual imposition may not hit the target. The problem of setting thecorrect marine reserves is qualitatively similar to the setting of the correct TAC orfisheries tax rate. The main difference is that the knowledge base for setting ma-rine reserves is probably substantially weaker than that for these more traditionalcontrols.
Acknowledgments
Research of T. K. Kar is supported by the Council of Scientific and IndustrialResearch(CSIR), India (Grant no. 25(0160)/ 08 / EMR-II dated 17.01.08.
References
[1] Anderson L. G. and Lee D. R., Optimal governing instrument, operation level and enforce-ment in natural resource regulation: The case of the fishery, American Journal of AgriculturalEconomics, 68(1986)678-690.
[2] Birkoff G. and Rota G.C., Ordinary Differential Equations. Ginn;1982.[3] Chaudhuri K. S. and Johnson T., Bioeconomic dynamics of a fishery modeled as an S-system,
Mathematical Biosciences, 99(1990)231-249.[4] Chaudhuri K. S., A bioeconomic model of harvesting a multispecies fishery, Ecol. Model.,
32(1986)267-279.[5] Chaudhuri K. S., Dynamic optimization of combined harvesting of a two-species fishery, Ecol.
Model., 41(1988)17-25.[6] Clark C. W., Mathematical Bioeconomics: The optimal Management of Renewable Re-
sources, 2nd ed., John Wiley and Sons, New York, 1990.[7] Conrad J.M., The bioeconomics of marine sanctuaries, Journal of Bioeconomics, 1(1999),
205-217.[8] Dixon J.A., Economic benefits of marine protected areas, Oceanus, 36(3)(1993) 35-40.[9] Ganguly S. and Chaudhuri K. S., Regulations of a single species fishery by taxation, Ecological
Modelling, 82(1995)51-60.[10] Hannesson R., Marine Reserves: What would they accomplish? Marine Resource Economics,
13(1998)159-170.[11] Hannesson R., The economics of marine reserves, Natural Resource Modeling, 15(2002)273-
290.[12] Holling C.S., The functional response of predators to prey density and its role in mimicry
and population regulation, Memories of Entromological Society of Canada, 45(1965)1-60.[13] Kar T. K. and Chaudhuri K. S., Regulation of a prey-predator fishery by taxation: A dy-
namics reaction model, Journal of Biological Systems, 11(2) (2003)173-187.[14] Kar T.K. and Misra S., Influence of prey reserve in a prey-predator fishery, Nonlinear Analysis,
65(2006)1725-1735.[15] Kar T. K., A model for fishery resource with reserve area and facing prey-predator interac-
tions, Canadian Applied Mathematics Quarterly, 14(4)( 2006), 385-399.[16] Kar T.K.and Matsuda H., Controllability of a harvested prey-predator system with time
delay, Journal of Biological Systems, 14(2) (2006)243-254.
332 T.K.KAR AND K. CHAKRABORTY
[17] Kar T.K. and Matsuda H., Global dynamics and controllability of a harvested prey-predatorsystem with Holling type III functional response, Nonlinear Analysis: Hybrid Systems,1(2007)59-67.
[18] Krishna S. V., Srinivasu P. D. N. and Kaymakcalan B., Conservation of an ecosystem throughoptimal taxation, Bulletin of Mathematical Biology, 60(1998) 569-584.
[19] Liu, W. M., Criterion of Hopf bifurcations without using eigenvalues, J. Math. Anal. Appl.182(1994) 250-256.
[20] Mesterton-Gibbons M., On the optimal policy for combined harvesting of independent species,Natural Resource Modelling, 2(1987)109-134.
[21] Pradhan T. and Chaudhuri K. S., A dynamic reaction model of two species fishery with tax-ation as a control instrument: A capital theoretic analysis, Ecological Modelling, 121(1999)1-16.
[22] Yan X.P. and Zhang C.H., Hopf bifurcation in a delayed Lokta-Volterra predator-prey system,Nonlinear Analysis: Real World Applications, 9(2008)114 - 127.
[23] Zhanga Z. and Tianb T., Multiple positive periodic solutions for a generalized predator-preysystem with exploited terms, Nonlinear Analysis: Real World Applications, 9(2008)26-39.
Department of Mathematics, Bengal Engineering and Science University, Shibpur, Howrah-711103,West Bengal, India
E-mail : [email protected]
Department of Mathematics, MCKV Institute of Engineering, 243 G.T.Road (N), Liluah,Howrah-711204, West Bengal, India
E-mail : kc [email protected].