Embed Size (px)
Citation preview
EfficientGPU-basedConstruction
of OGs
Motivation
OccupancyGridsBayesian Model
Sensor Model
From rangeinformation to2D gridPrevious Work
GPU Imple-mentationGeneral AlgorithmArchitecture
Dirac model
Gaussian model
ResultsEvaluationAlgorithms
Evaluation
Fusion results
Summary andperspectives
Efficient GPU-based Construction ofOccupancy Grids Using several Laser
Range-finders
M. Yguel1 O. Aycard2 C. Laugier3
1Institut National Polytechnique de GrenobleProBayes S.A.
2University of Joseph Fourier
3Institut National de Recherche en Informatique et Automatique
International Conference on Intelligent Robots andSystems, 2006
1 / 33
EfficientGPU-basedConstruction
of OGs
Motivation
OccupancyGridsBayesian Model
Sensor Model
From rangeinformation to2D gridPrevious Work
GPU Imple-mentationGeneral AlgorithmArchitecture
Dirac model
Gaussian model
ResultsEvaluationAlgorithms
Evaluation
Fusion results
Summary andperspectives
Outline
1 Motivation
2 Occupancy GridsBayesian ModelSensor Model
3 From range information to 2D gridPrevious Work
4 GPU ImplementationGeneral Algorithm ArchitectureDirac modelGaussian model
5 Results EvaluationAlgorithmsEvaluationFusion results
2 / 33
EfficientGPU-basedConstruction
of OGs
Motivation
OccupancyGridsBayesian Model
Sensor Model
From rangeinformation to2D gridPrevious Work
GPU Imple-mentationGeneral AlgorithmArchitecture
Dirac model
Gaussian model
ResultsEvaluationAlgorithms
Evaluation
Fusion results
Summary andperspectives
Environment modelling
Enforce vehicle safety by• percieving the whole robot
surroundings,• being robust to false
measurements,• having precise map,• providing real-time map.
3 / 33
EfficientGPU-basedConstruction
of OGs
Motivation
OccupancyGridsBayesian Model
Sensor Model
From rangeinformation to2D gridPrevious Work
GPU Imple-mentationGeneral AlgorithmArchitecture
Dirac model
Gaussian model
ResultsEvaluationAlgorithms
Evaluation
Fusion results
Summary andperspectives
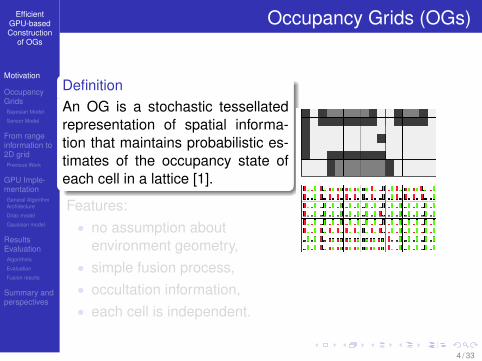
Occupancy Grids (OGs)
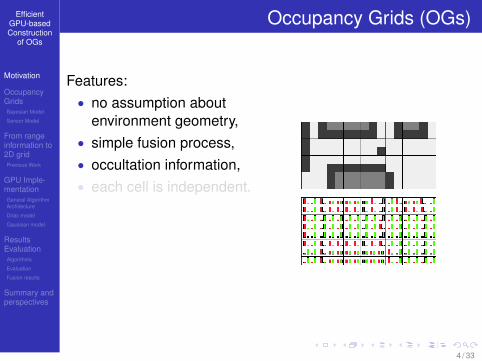
DefinitionAn OG is a stochastic tessellatedrepresentation of spatial informa-tion that maintains probabilistic es-timates of the occupancy state ofeach cell in a lattice [1].
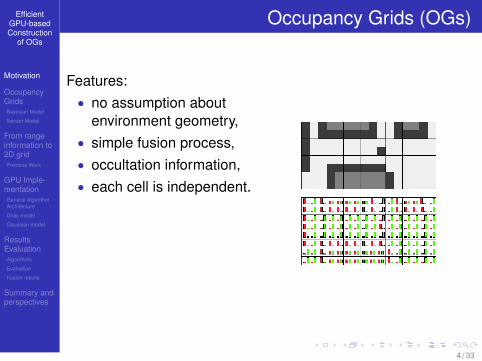
Features:• no assumption about
environment geometry,• simple fusion process,• occultation information,• each cell is independent.
4 / 33
EfficientGPU-basedConstruction
of OGs
Motivation
OccupancyGridsBayesian Model
Sensor Model
From rangeinformation to2D gridPrevious Work
GPU Imple-mentationGeneral AlgorithmArchitecture
Dirac model
Gaussian model
ResultsEvaluationAlgorithms
Evaluation
Fusion results
Summary andperspectives
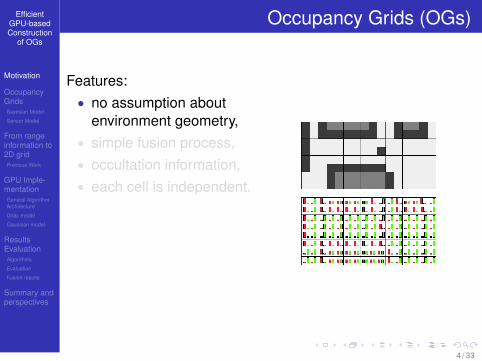
Occupancy Grids (OGs)
Features:• no assumption about
environment geometry,• simple fusion process,• occultation information,• each cell is independent.
4 / 33
EfficientGPU-basedConstruction
of OGs
Motivation
OccupancyGridsBayesian Model
Sensor Model
From rangeinformation to2D gridPrevious Work
GPU Imple-mentationGeneral AlgorithmArchitecture
Dirac model
Gaussian model
ResultsEvaluationAlgorithms
Evaluation
Fusion results
Summary andperspectives
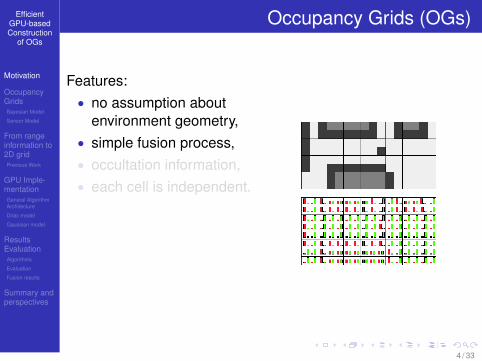
Occupancy Grids (OGs)
Features:• no assumption about
environment geometry,• simple fusion process,• occultation information,• each cell is independent.
4 / 33
EfficientGPU-basedConstruction
of OGs
Motivation
OccupancyGridsBayesian Model
Sensor Model
From rangeinformation to2D gridPrevious Work
GPU Imple-mentationGeneral AlgorithmArchitecture
Dirac model
Gaussian model
ResultsEvaluationAlgorithms
Evaluation
Fusion results
Summary andperspectives
Occupancy Grids (OGs)
Features:• no assumption about
environment geometry,• simple fusion process,• occultation information,• each cell is independent.
4 / 33
EfficientGPU-basedConstruction
of OGs
Motivation
OccupancyGridsBayesian Model
Sensor Model
From rangeinformation to2D gridPrevious Work
GPU Imple-mentationGeneral AlgorithmArchitecture
Dirac model
Gaussian model
ResultsEvaluationAlgorithms
Evaluation
Fusion results
Summary andperspectives
Occupancy Grids (OGs)
Features:• no assumption about
environment geometry,• simple fusion process,• occultation information,• each cell is independent.
4 / 33
EfficientGPU-basedConstruction
of OGs
Motivation
OccupancyGridsBayesian Model
Sensor Model
From rangeinformation to2D gridPrevious Work
GPU Imple-mentationGeneral AlgorithmArchitecture
Dirac model
Gaussian model
ResultsEvaluationAlgorithms
Evaluation
Fusion results
Summary andperspectives
OGs drawback
Grids have image-like structures:• huge amount of data
e.g. 100mx100m grid with cell side of 5cm→ 4M cells
• enlarging the field of view→ increases the amount of data
• increasing precision→ increases the amount of data
5 / 33

EfficientGPU-basedConstruction
of OGs
Motivation
OccupancyGridsBayesian Model
Sensor Model
From rangeinformation to2D gridPrevious Work
GPU Imple-mentationGeneral AlgorithmArchitecture
Dirac model
Gaussian model
ResultsEvaluationAlgorithms
Evaluation
Fusion results
Summary andperspectives
OGs drawback
Grids have image-like structures:• huge amount of data
e.g. 100mx100m grid with cell side of 5cm→ 4M cells
• enlarging the field of view→ increases the amount of data
• increasing precision→ increases the amount of data
5 / 33
EfficientGPU-basedConstruction
of OGs
Motivation
OccupancyGridsBayesian Model
Sensor Model
From rangeinformation to2D gridPrevious Work
GPU Imple-mentationGeneral AlgorithmArchitecture
Dirac model
Gaussian model
ResultsEvaluationAlgorithms
Evaluation
Fusion results
Summary andperspectives
The Graphical Hardwares
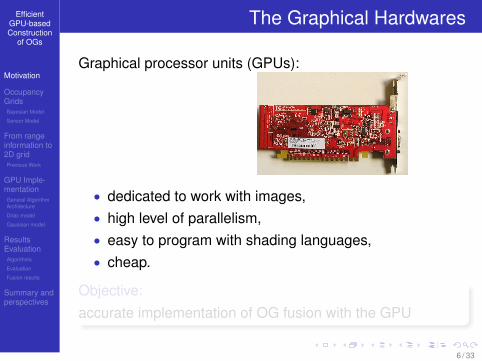
Graphical processor units (GPUs):
• dedicated to work with images,• high level of parallelism,• easy to program with shading languages,• cheap.
Objective:accurate implementation of OG fusion with the GPU
6 / 33

EfficientGPU-basedConstruction
of OGs
Motivation
OccupancyGridsBayesian Model
Sensor Model
From rangeinformation to2D gridPrevious Work
GPU Imple-mentationGeneral AlgorithmArchitecture
Dirac model
Gaussian model
ResultsEvaluationAlgorithms
Evaluation
Fusion results
Summary andperspectives
The Graphical Hardwares
Graphical processor units (GPUs):
• dedicated to work with images,• high level of parallelism,• easy to program with shading languages,• cheap.
Objective:accurate implementation of OG fusion with the GPU
6 / 33

EfficientGPU-basedConstruction
of OGs
Motivation
OccupancyGridsBayesian Model
Sensor Model
From rangeinformation to2D gridPrevious Work
GPU Imple-mentationGeneral AlgorithmArchitecture
Dirac model
Gaussian model
ResultsEvaluationAlgorithms
Evaluation
Fusion results
Summary andperspectives
Outline
1 Motivation
2 Occupancy GridsBayesian ModelSensor Model
3 From range information to 2D gridPrevious Work
4 GPU ImplementationGeneral Algorithm ArchitectureDirac modelGaussian model
5 Results EvaluationAlgorithmsEvaluationFusion results
7 / 33
EfficientGPU-basedConstruction
of OGs
Motivation
OccupancyGridsBayesian Model
Sensor Model
From rangeinformation to2D gridPrevious Work
GPU Imple-mentationGeneral AlgorithmArchitecture
Dirac model
Gaussian model
ResultsEvaluationAlgorithms
Evaluation
Fusion results
Summary andperspectives
OG Bayesian Model
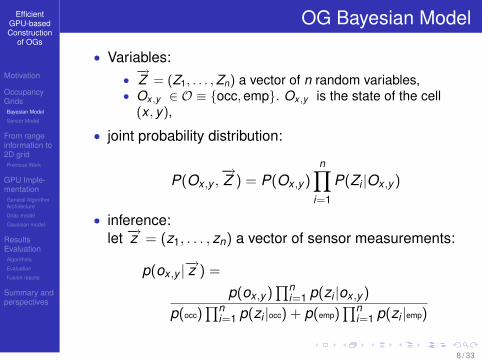
• Variables:•−→Z = (Z1, . . . , Zn) a vector of n random variables,
• Ox,y ∈ O ≡ {occ, emp}. Ox,y is the state of the cell(x , y),
• joint probability distribution:
P(Ox ,y ,−→Z ) = P(Ox ,y )
n∏i=1
P(Zi |Ox ,y )
• inference:let −→z = (z1, . . . , zn) a vector of sensor measurements:
p(ox ,y |−→z ) =
p(ox ,y )∏n
i=1 p(zi |ox ,y )
p(occ)∏n
i=1 p(zi |occ) + p(emp)∏n
i=1 p(zi |emp)
8 / 33
EfficientGPU-basedConstruction
of OGs
Motivation
OccupancyGridsBayesian Model
Sensor Model
From rangeinformation to2D gridPrevious Work
GPU Imple-mentationGeneral AlgorithmArchitecture
Dirac model
Gaussian model
ResultsEvaluationAlgorithms
Evaluation
Fusion results
Summary andperspectives
OG Bayesian Model
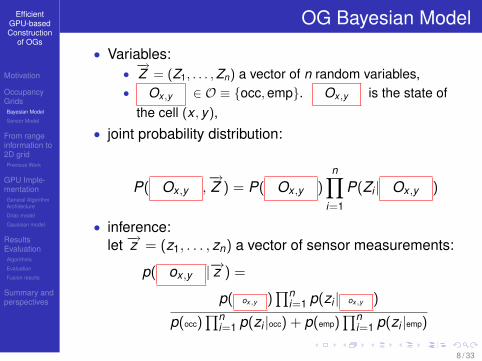
• Variables:•−→Z = (Z1, . . . , Zn) a vector of n random variables,
• Ox,y ∈ O ≡ {occ, emp}. Ox,y is the state ofthe cell (x , y),
• joint probability distribution:
P( Ox ,y ,−→Z ) = P( Ox ,y )
n∏i=1
P(Zi | Ox ,y )
• inference:let −→z = (z1, . . . , zn) a vector of sensor measurements:
p( ox ,y |−→z ) =
p( ox,y )∏n
i=1 p(zi | ox,y )
p(occ)∏n
i=1 p(zi |occ) + p(emp)∏n
i=1 p(zi |emp)
8 / 33
EfficientGPU-basedConstruction
of OGs
Motivation
OccupancyGridsBayesian Model
Sensor Model
From rangeinformation to2D gridPrevious Work
GPU Imple-mentationGeneral AlgorithmArchitecture
Dirac model
Gaussian model
ResultsEvaluationAlgorithms
Evaluation
Fusion results
Summary andperspectives
OG Bayesian Model
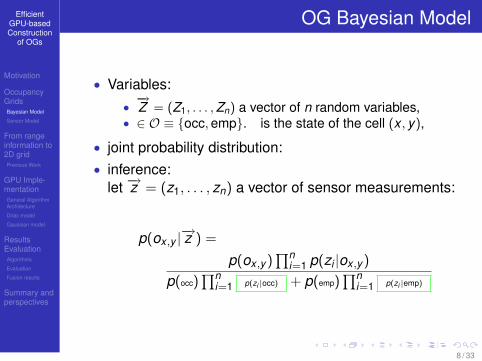
• Variables:•−→Z = (Z1, . . . , Zn) a vector of n random variables,
• ∈ O ≡ {occ, emp}. is the state of the cell (x , y),
• joint probability distribution:• inference:
let −→z = (z1, . . . , zn) a vector of sensor measurements:
p(ox ,y |−→z ) =
p(ox ,y )∏n
i=1 p(zi |ox ,y )
p(occ)∏n
i=1 p(zi |occ) + p(emp)∏n
i=1 p(zi |emp)
8 / 33

EfficientGPU-basedConstruction
of OGs
Motivation
OccupancyGridsBayesian Model
Sensor Model
From rangeinformation to2D gridPrevious Work
GPU Imple-mentationGeneral AlgorithmArchitecture
Dirac model
Gaussian model
ResultsEvaluationAlgorithms
Evaluation
Fusion results
Summary andperspectives
Outline
1 Motivation
2 Occupancy GridsBayesian ModelSensor Model
3 From range information to 2D gridPrevious Work
4 GPU ImplementationGeneral Algorithm ArchitectureDirac modelGaussian model
5 Results EvaluationAlgorithmsEvaluationFusion results
9 / 33
EfficientGPU-basedConstruction
of OGs
Motivation
OccupancyGridsBayesian Model
Sensor Model
From rangeinformation to2D gridPrevious Work
GPU Imple-mentationGeneral AlgorithmArchitecture
Dirac model
Gaussian model
ResultsEvaluationAlgorithms
Evaluation
Fusion results
Summary andperspectives
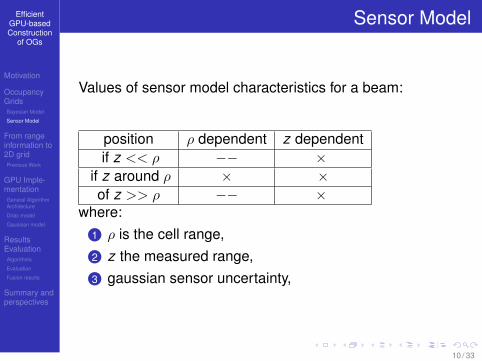
Sensor Model
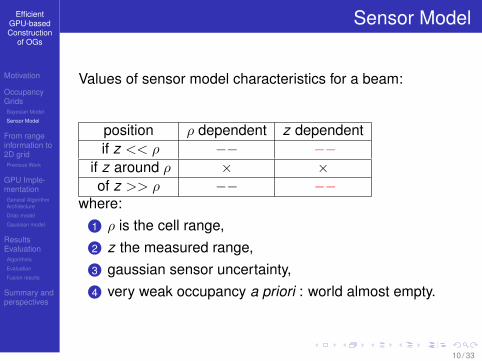
Values of sensor model characteristics for a beam:
position ρ dependent z dependentif z << ρ −− ×
if z around ρ × ×of z >> ρ −− ×
where:1 ρ is the cell range,2 z the measured range,3 gaussian sensor uncertainty,
10 / 33
EfficientGPU-basedConstruction
of OGs
Motivation
OccupancyGridsBayesian Model
Sensor Model
From rangeinformation to2D gridPrevious Work
GPU Imple-mentationGeneral AlgorithmArchitecture
Dirac model
Gaussian model
ResultsEvaluationAlgorithms
Evaluation
Fusion results
Summary andperspectives
Sensor Model
Values of sensor model characteristics for a beam:
position ρ dependent z dependentif z << ρ −− −−
if z around ρ × ×of z >> ρ −− −−
where:1 ρ is the cell range,2 z the measured range,3 gaussian sensor uncertainty,4 very weak occupancy a priori : world almost empty.
10 / 33
EfficientGPU-basedConstruction
of OGs
Motivation
OccupancyGridsBayesian Model
Sensor Model
From rangeinformation to2D gridPrevious Work
GPU Imple-mentationGeneral AlgorithmArchitecture
Dirac model
Gaussian model
ResultsEvaluationAlgorithms
Evaluation
Fusion results
Summary andperspectives
1D Occupancy Function
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 20 40 60 80 100 120
Occ
upan
cy p
roba
bilit
ies.
Cell indices.
(a)
0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1
-25 -20 -15 -10 -5 0 5 10 15 20 25X cell indices. 0 50
100 150
200 250
300
Y cell indices.
0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
1
Occupancy probabilities.
(b)
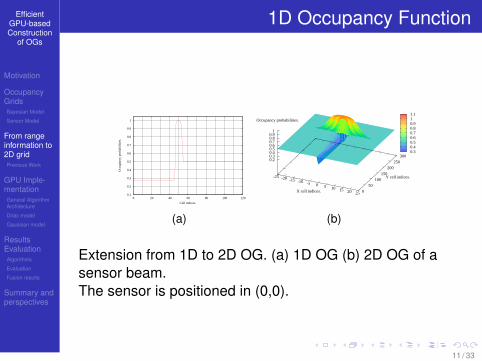
Extension from 1D to 2D OG. (a) 1D OG (b) 2D OG of asensor beam.The sensor is positioned in (0,0).
11 / 33
EfficientGPU-basedConstruction
of OGs
Motivation
OccupancyGridsBayesian Model
Sensor Model
From rangeinformation to2D gridPrevious Work
GPU Imple-mentationGeneral AlgorithmArchitecture
Dirac model
Gaussian model
ResultsEvaluationAlgorithms
Evaluation
Fusion results
Summary andperspectives
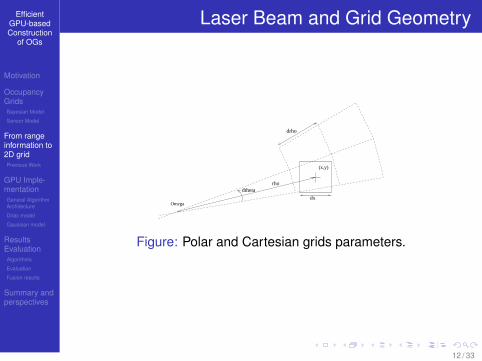
Laser Beam and Grid Geometry
(x,y)
drho
dx
dthetarho
Omega
Figure: Polar and Cartesian grids parameters.
12 / 33

EfficientGPU-basedConstruction
of OGs
Motivation
OccupancyGridsBayesian Model
Sensor Model
From rangeinformation to2D gridPrevious Work
GPU Imple-mentationGeneral AlgorithmArchitecture
Dirac model
Gaussian model
ResultsEvaluationAlgorithms
Evaluation
Fusion results
Summary andperspectives
Outline
1 Motivation
2 Occupancy GridsBayesian ModelSensor Model
3 From range information to 2D gridPrevious Work
4 GPU ImplementationGeneral Algorithm ArchitectureDirac modelGaussian model
5 Results EvaluationAlgorithmsEvaluationFusion results
13 / 33
EfficientGPU-basedConstruction
of OGs
Motivation
OccupancyGridsBayesian Model
Sensor Model
From rangeinformation to2D gridPrevious Work
GPU Imple-mentationGeneral AlgorithmArchitecture
Dirac model
Gaussian model
ResultsEvaluationAlgorithms
Evaluation
Fusion results
Summary andperspectives
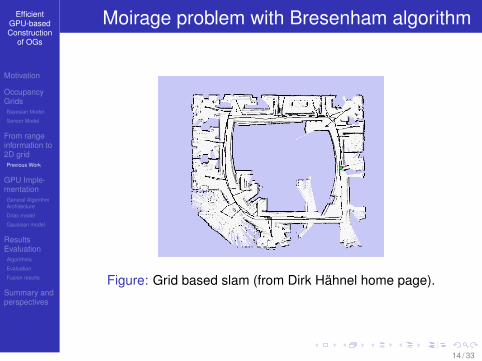
Moirage problem with Bresenham algorithm
Figure: Grid based slam (from Dirk Hähnel home page).
14 / 33

EfficientGPU-basedConstruction
of OGs
Motivation
OccupancyGridsBayesian Model
Sensor Model
From rangeinformation to2D gridPrevious Work
GPU Imple-mentationGeneral AlgorithmArchitecture
Dirac model
Gaussian model
ResultsEvaluationAlgorithms
Evaluation
Fusion results
Summary andperspectives
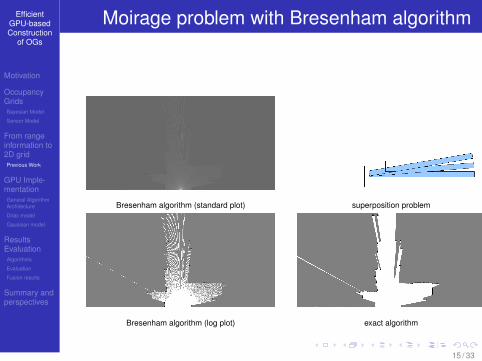
Moirage problem with Bresenham algorithm
Bresenham algorithm (standard plot) superposition problem
Bresenham algorithm (log plot) exact algorithm
15 / 33
EfficientGPU-basedConstruction
of OGs
Motivation
OccupancyGridsBayesian Model
Sensor Model
From rangeinformation to2D gridPrevious Work
GPU Imple-mentationGeneral AlgorithmArchitecture
Dirac model
Gaussian model
ResultsEvaluationAlgorithms
Evaluation
Fusion results
Summary andperspectives
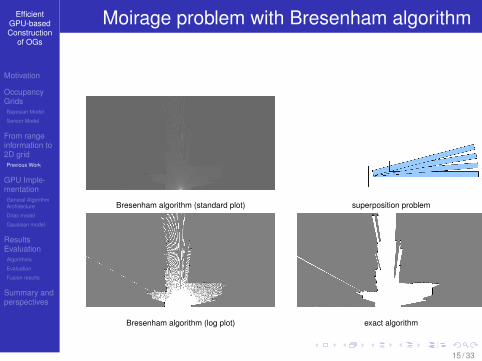
Moirage problem with Bresenham algorithm
Bresenham algorithm (standard plot) superposition problem
Bresenham algorithm (log plot) exact algorithm
15 / 33
EfficientGPU-basedConstruction
of OGs
Motivation
OccupancyGridsBayesian Model
Sensor Model
From rangeinformation to2D gridPrevious Work
GPU Imple-mentationGeneral AlgorithmArchitecture
Dirac model
Gaussian model
ResultsEvaluationAlgorithms
Evaluation
Fusion results
Summary andperspectives
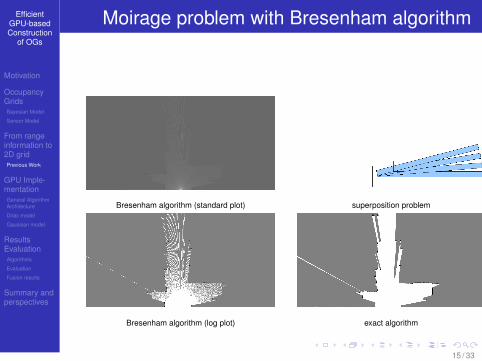
Moirage problem with Bresenham algorithm
Bresenham algorithm (standard plot) superposition problem
Bresenham algorithm (log plot) exact algorithm
15 / 33
EfficientGPU-basedConstruction
of OGs
Motivation
OccupancyGridsBayesian Model
Sensor Model
From rangeinformation to2D gridPrevious Work
GPU Imple-mentationGeneral AlgorithmArchitecture
Dirac model
Gaussian model
ResultsEvaluationAlgorithms
Evaluation
Fusion results
Summary andperspectives
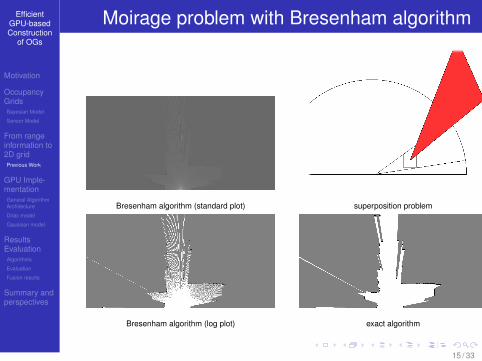
Moirage problem with Bresenham algorithm
Bresenham algorithm (standard plot) superposition problem
Bresenham algorithm (log plot) exact algorithm
15 / 33
EfficientGPU-basedConstruction
of OGs
Motivation
OccupancyGridsBayesian Model
Sensor Model
From rangeinformation to2D gridPrevious Work
GPU Imple-mentationGeneral AlgorithmArchitecture
Dirac model
Gaussian model
ResultsEvaluationAlgorithms
Evaluation
Fusion results
Summary andperspectives
Moirage problem with Bresenham algorithm
Bresenham algorithm (standard plot) superposition problem
Bresenham algorithm (log plot) exact algorithm
15 / 33
EfficientGPU-basedConstruction
of OGs
Motivation
OccupancyGridsBayesian Model
Sensor Model
From rangeinformation to2D gridPrevious Work
GPU Imple-mentationGeneral AlgorithmArchitecture
Dirac model
Gaussian model
ResultsEvaluationAlgorithms
Evaluation
Fusion results
Summary andperspectives
Outline
1 Motivation
2 Occupancy GridsBayesian ModelSensor Model
3 From range information to 2D gridPrevious Work
4 GPU ImplementationGeneral Algorithm ArchitectureDirac modelGaussian model
5 Results EvaluationAlgorithmsEvaluationFusion results
16 / 33

EfficientGPU-basedConstruction
of OGs
Motivation
OccupancyGridsBayesian Model
Sensor Model
From rangeinformation to2D gridPrevious Work
GPU Imple-mentationGeneral AlgorithmArchitecture
Dirac model
Gaussian model
ResultsEvaluationAlgorithms
Evaluation
Fusion results
Summary andperspectives
General Algorithm Architecture
FUSION
NEW GRID
Geometric transform Geometric transform
precalculated
sensor model
precalculated
sensor model
inferencePREVIOUS GRID
p(z|occ) p(z|emp)
Sensor model selection Sensor model selection
17 / 33

EfficientGPU-basedConstruction
of OGs
Motivation
OccupancyGridsBayesian Model
Sensor Model
From rangeinformation to2D gridPrevious Work
GPU Imple-mentationGeneral AlgorithmArchitecture
Dirac model
Gaussian model
ResultsEvaluationAlgorithms
Evaluation
Fusion results
Summary andperspectives
General Algorithm Architecture
FUSION
NEW GRID
Geometric transform Geometric transform
precalculated
sensor model
precalculated
sensor model
inferencePREVIOUS GRID
p(z|occ) p(z|emp)
Sensor model selection Sensor model selection
GPU STEPS
17 / 33

EfficientGPU-basedConstruction
of OGs
Motivation
OccupancyGridsBayesian Model
Sensor Model
From rangeinformation to2D gridPrevious Work
GPU Imple-mentationGeneral AlgorithmArchitecture
Dirac model
Gaussian model
ResultsEvaluationAlgorithms
Evaluation
Fusion results
Summary andperspectives
Outline
1 Motivation
2 Occupancy GridsBayesian ModelSensor Model
3 From range information to 2D gridPrevious Work
4 GPU ImplementationGeneral Algorithm ArchitectureDirac modelGaussian model
5 Results EvaluationAlgorithmsEvaluationFusion results
18 / 33

EfficientGPU-basedConstruction
of OGs
Motivation
OccupancyGridsBayesian Model
Sensor Model
From rangeinformation to2D gridPrevious Work
GPU Imple-mentationGeneral AlgorithmArchitecture
Dirac model
Gaussian model
ResultsEvaluationAlgorithms
Evaluation
Fusion results
Summary andperspectives
Polygons geometric primitives
19 / 33
EfficientGPU-basedConstruction
of OGs
Motivation
OccupancyGridsBayesian Model
Sensor Model
From rangeinformation to2D gridPrevious Work
GPU Imple-mentationGeneral AlgorithmArchitecture
Dirac model
Gaussian model
ResultsEvaluationAlgorithms
Evaluation
Fusion results
Summary andperspectives
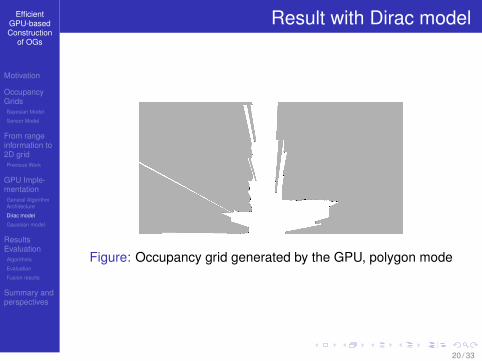
Result with Dirac model
Figure: Occupancy grid generated by the GPU, polygon mode
20 / 33

EfficientGPU-basedConstruction
of OGs
Motivation
OccupancyGridsBayesian Model
Sensor Model
From rangeinformation to2D gridPrevious Work
GPU Imple-mentationGeneral AlgorithmArchitecture
Dirac model
Gaussian model
ResultsEvaluationAlgorithms
Evaluation
Fusion results
Summary andperspectives
Outline
1 Motivation
2 Occupancy GridsBayesian ModelSensor Model
3 From range information to 2D gridPrevious Work
4 GPU ImplementationGeneral Algorithm ArchitectureDirac modelGaussian model
5 Results EvaluationAlgorithmsEvaluationFusion results
21 / 33
EfficientGPU-basedConstruction
of OGs
Motivation
OccupancyGridsBayesian Model
Sensor Model
From rangeinformation to2D gridPrevious Work
GPU Imple-mentationGeneral AlgorithmArchitecture
Dirac model
Gaussian model
ResultsEvaluationAlgorithms
Evaluation
Fusion results
Summary andperspectives
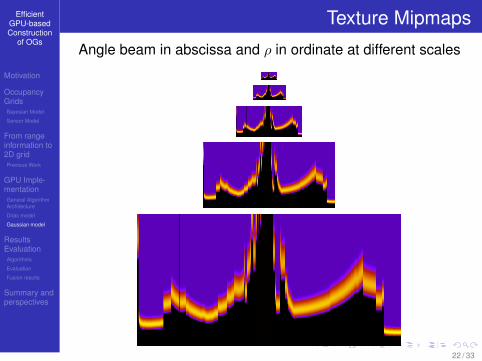
Texture Mipmaps
Angle beam in abscissa and ρ in ordinate at different scales
22 / 33
EfficientGPU-basedConstruction
of OGs
Motivation
OccupancyGridsBayesian Model
Sensor Model
From rangeinformation to2D gridPrevious Work
GPU Imple-mentationGeneral AlgorithmArchitecture
Dirac model
Gaussian model
ResultsEvaluationAlgorithms
Evaluation
Fusion results
Summary andperspectives
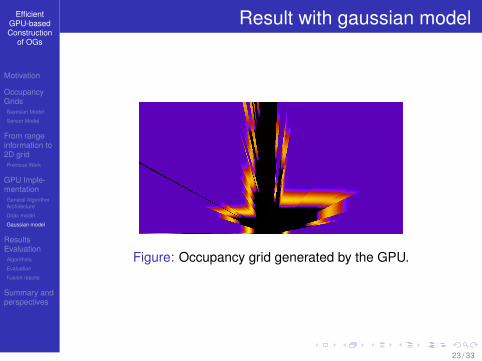
Result with gaussian model
Figure: Occupancy grid generated by the GPU.
23 / 33
EfficientGPU-basedConstruction
of OGs
Motivation
OccupancyGridsBayesian Model
Sensor Model
From rangeinformation to2D gridPrevious Work
GPU Imple-mentationGeneral AlgorithmArchitecture
Dirac model
Gaussian model
ResultsEvaluationAlgorithms
Evaluation
Fusion results
Summary andperspectives
Outline
1 Motivation
2 Occupancy GridsBayesian ModelSensor Model
3 From range information to 2D gridPrevious Work
4 GPU ImplementationGeneral Algorithm ArchitectureDirac modelGaussian model
5 Results EvaluationAlgorithmsEvaluationFusion results
24 / 33
EfficientGPU-basedConstruction
of OGs
Motivation
OccupancyGridsBayesian Model
Sensor Model
From rangeinformation to2D gridPrevious Work
GPU Imple-mentationGeneral AlgorithmArchitecture
Dirac model
Gaussian model
ResultsEvaluationAlgorithms
Evaluation
Fusion results
Summary andperspectives
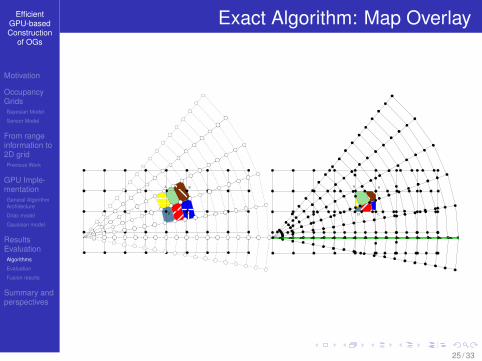
Exact Algorithm: Map Overlay
A B
D C
A B
CD
25 / 33
EfficientGPU-basedConstruction
of OGs
Motivation
OccupancyGridsBayesian Model
Sensor Model
From rangeinformation to2D gridPrevious Work
GPU Imple-mentationGeneral AlgorithmArchitecture
Dirac model
Gaussian model
ResultsEvaluationAlgorithms
Evaluation
Fusion results
Summary andperspectives
Algorithms for sick sensors with Dirac model
1 exact,2 Bresenham,3 adaptative sampling,4 GPU (polygon mode)
26 / 33
EfficientGPU-basedConstruction
of OGs
Motivation
OccupancyGridsBayesian Model
Sensor Model
From rangeinformation to2D gridPrevious Work
GPU Imple-mentationGeneral AlgorithmArchitecture
Dirac model
Gaussian model
ResultsEvaluationAlgorithms
Evaluation
Fusion results
Summary andperspectives
Outline
1 Motivation
2 Occupancy GridsBayesian ModelSensor Model
3 From range information to 2D gridPrevious Work
4 GPU ImplementationGeneral Algorithm ArchitectureDirac modelGaussian model
5 Results EvaluationAlgorithmsEvaluationFusion results
27 / 33
EfficientGPU-basedConstruction
of OGs
Motivation
OccupancyGridsBayesian Model
Sensor Model
From rangeinformation to2D gridPrevious Work
GPU Imple-mentationGeneral AlgorithmArchitecture
Dirac model
Gaussian model
ResultsEvaluationAlgorithms
Evaluation
Fusion results
Summary andperspectives
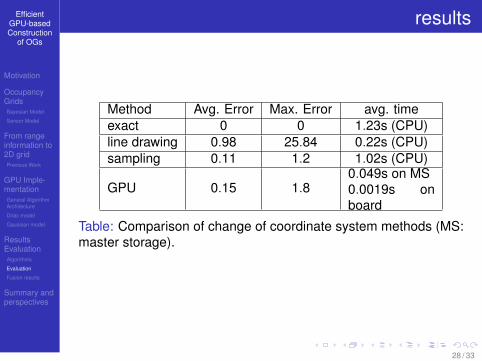
results
Method Avg. Error Max. Error avg. timeexact 0 0 1.23s (CPU)line drawing 0.98 25.84 0.22s (CPU)sampling 0.11 1.2 1.02s (CPU)
GPU 0.15 1.80.049s on MS0.0019s onboard
Table: Comparison of change of coordinate system methods (MS:master storage).
28 / 33

EfficientGPU-basedConstruction
of OGs
Motivation
OccupancyGridsBayesian Model
Sensor Model
From rangeinformation to2D gridPrevious Work
GPU Imple-mentationGeneral AlgorithmArchitecture
Dirac model
Gaussian model
ResultsEvaluationAlgorithms
Evaluation
Fusion results
Summary andperspectives
Outline
1 Motivation
2 Occupancy GridsBayesian ModelSensor Model
3 From range information to 2D gridPrevious Work
4 GPU ImplementationGeneral Algorithm ArchitectureDirac modelGaussian model
5 Results EvaluationAlgorithmsEvaluationFusion results
29 / 33
EfficientGPU-basedConstruction
of OGs
Motivation
OccupancyGridsBayesian Model
Sensor Model
From rangeinformation to2D gridPrevious Work
GPU Imple-mentationGeneral AlgorithmArchitecture
Dirac model
Gaussian model
ResultsEvaluationAlgorithms
Evaluation
Fusion results
Summary andperspectives
fusion results
-vo x11 cycabFusion.aviFusion of four SICK laser range-finders surrounding a vehicle.
30 / 33
EfficientGPU-basedConstruction
of OGs
Motivation
OccupancyGridsBayesian Model
Sensor Model
From rangeinformation to2D gridPrevious Work
GPU Imple-mentationGeneral AlgorithmArchitecture
Dirac model
Gaussian model
ResultsEvaluationAlgorithms
Evaluation
Fusion results
Summary andperspectives
Summary
1 correct sampling is necessary,2 graphical hardwares for sensor geometry,3 graphical hardwares for multiple sensor fusion and grid
handling,4 on board: fusion of 50 sensors is possible in real-time.
31 / 33
EfficientGPU-basedConstruction
of OGs
Motivation
OccupancyGridsBayesian Model
Sensor Model
From rangeinformation to2D gridPrevious Work
GPU Imple-mentationGeneral AlgorithmArchitecture
Dirac model
Gaussian model
ResultsEvaluationAlgorithms
Evaluation
Fusion results
Summary andperspectives
Perspectives
Handling with GPU:1 angle uncertainty,2 sensor position uncertainty,3 scan matching.
32 / 33
EfficientGPU-basedConstruction
of OGs
Alberto Elfes.Occupancy grids: a probabilistic framework for robotperception and navigation.PhD thesis, Carnegie Mellon University, 1989.
33 / 33