Embed Size (px)
Citation preview

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
IEEE/ASME TRANSACTIONS ON MECHATRONICS 1
Effects of Wireless Power Transfer on CapacitiveCoupling Human Body Communication
Rumei Zhang, Hao Liu, Member, IEEE, Qi Shao, Guiyang Li, Xuelin Fang, and Hongyi Li, Member, IEEE
Abstract—The capsule endoscope is being integrated with vari-ous kinds of actuators and sensors to form a micromedical robot,and hence, it requires much more energy than before. Wirelesspower transfer (WPT) is promising to address the energy supplyproblem, but strictly restricted to keep safe. Human body com-munication (HBC), a low-power consumption method, can greatlyreduce energy for communication. This paper, for the first time,combines HBC with WPT to investigate the possibility of theirworking together, and focuses on the effects of WPT on the com-munication effectiveness of HBC. Parameters for both HBC andWPT are set to be those widely studied or even clinically used.The frequencies and peak-peak voltages for HBC were selected as3 MHz and 3.3 V, and WPT were adjusted from 0 kHz to 1.5 MHzand 0 to 400 V. On the one hand, HBC with fundamental sinusoidalwave was used to study the interaction. The simulation results ac-cord well with the experimental results, and both of them indicatethat the HBC signal can be accurately extracted based on IIR notchfilter. On the other hand, HBC modulated by binary differentialphase shift keying method was utilized. Groups of experimentswere conducted, and the received signals were demodulated by im-proved polarity comparison method. Bit error rate was calculatedto be zero in all the studied frequencies and voltages. Results indi-cate that HBC and WPT can cowork well when integrated in onecapsule robot.
Index Terms—Binary differential phase shift keying, communi-cation effectiveness, human body communication (HBC), interac-tion, wireless power transfer (WPT).
I. INTRODUCTION
THE wireless microcapsule robot has become a revolution-ary tool for the diagnosis and treatment of gastrointestinal
diseases with its significant advantages of minimal invasion andless pain [1], [2]. Unlike the passive capsule endoscope, it isexpected to eventually include sophisticated functions such asmultiparameter monitoring, active locomotion, drug delivery[3], biopsy, and local treatment [4]. As a result, the traditionalmethod using button battery cannot offer enough power for the
Manuscript received November 21, 2013; revised May 30, 2014; acceptedJuly 12, 2014. Recommended by Technical Editor F. Carpi. This work wassupported by the National Natural Science Foundation of China under Grant61105099 and Self-planned Project Funded by State Key Laboratory (No. 2013-Z10). (Corresponding author: Hao Liu.)
R. Zhang, Q. Shao and X. Fang are with the State Key Laboratory ofRobotics, Shenyang Institute of Automation, Chinese Academy of Sciences,Shenyang 110016, China, and also with the University of Chinese Academy ofSciences, Beijing 100049, China (e-mail: [email protected]; [email protected];[email protected]).
H. Liu, G. Li, and H. Li are with the State Key Laboratory of Robotics,Shenyang Institute of Automation, Chinese Academy of Sciences, Shenyang110016, China (e-mail: [email protected]; [email protected]; [email protected]).
Color versions of one or more of the figures in this paper are available onlineat http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/TMECH.2014.2345254
multifunctional microcapsule robot any longer [4], [5], and lim-ited power capacity is now becoming a main bottleneck for thefurther development of microcapsule robot [2], [6], [7].
Currently, solutions toward the energy problem for micro-capsule robot have been widely investigated, and some of themhave made considerable progress. Generally, they are dividedinto two categories: One is to find battery alternatives to solveenergy problem essentially; and the other is to reduce the powerconsumption from each component of microcapsule robot. Rep-resentatives of them are wireless power transfer (WPT) [4] andhuman body communication (HBC) [8].
WPT is the most promising and sustainable alternative tobattery because of its character of perpetual energy supply [9],[10]. The external primary coil generates an alternating mag-netic field, and the implanted secondary coil gathers the powerby inductive coupling [11]. However, there is only a part of theelectromagnetic energy emitted can be collected by the receiv-ing coil for the limited magnetic flux and the energy decay dueto the tissue absorption [12]. In addition, dramatic losses can becaused by the relative motion or significant tilting of the receiv-ing coil [13]. Thus, in order to provide enough energy for theadded actuating and sensing functions, the electromagnetic fieldproduced by the primary coil must be strong enough. However,according to the International Commission on Non-ionizing Ra-diation Protection (ICNIRP) safety guidelines[14], the specificabsorption rate (SAR) must be controlled to a certain extent forthe protection of human tissues [11]. Obviously, there is a con-flict between electromagnetic field intensity and human tissuesafety. As a result, power consumption from each module ofcapsule robot still has to be largely reduced.
HBC, which directly uses the human body as an electricalconductive medium [15], [16], is an emerging communicationtechnique for body sensor networks due to its features of higherdata rate, small size, and low power consumption [8]. Com-pared with traditional radio frequency (RF) data transmissioncircuit, HBC contacts with human body tissues only throughimpedance matched networks [17], which not only cuts downthe power dissipation [18], [19], but also reduces the size andcost of microcapsule robot. However, HBC can only reducepower consumption to a certain extent, but not solve energylimitation on microcapsule robot essentially.
So far, there have not yet been any reports that correlatedthese two techniques in one micromedical robot. In this paper, itis believed that the integration, in which traditional wireless RFis replaced by HBC for data transmission and button battery issubstituted by WPT as power source, is to generate a new energycontrol scheme and put it forward to the clinical application. Theenergy saved by HBC could be used to support the actuating and
1083-4435 © 2014 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission.See http://www.ieee.org/publications standards/publications/rights/index.html for more information.
This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
2 IEEE/ASME TRANSACTIONS ON MECHATRONICS
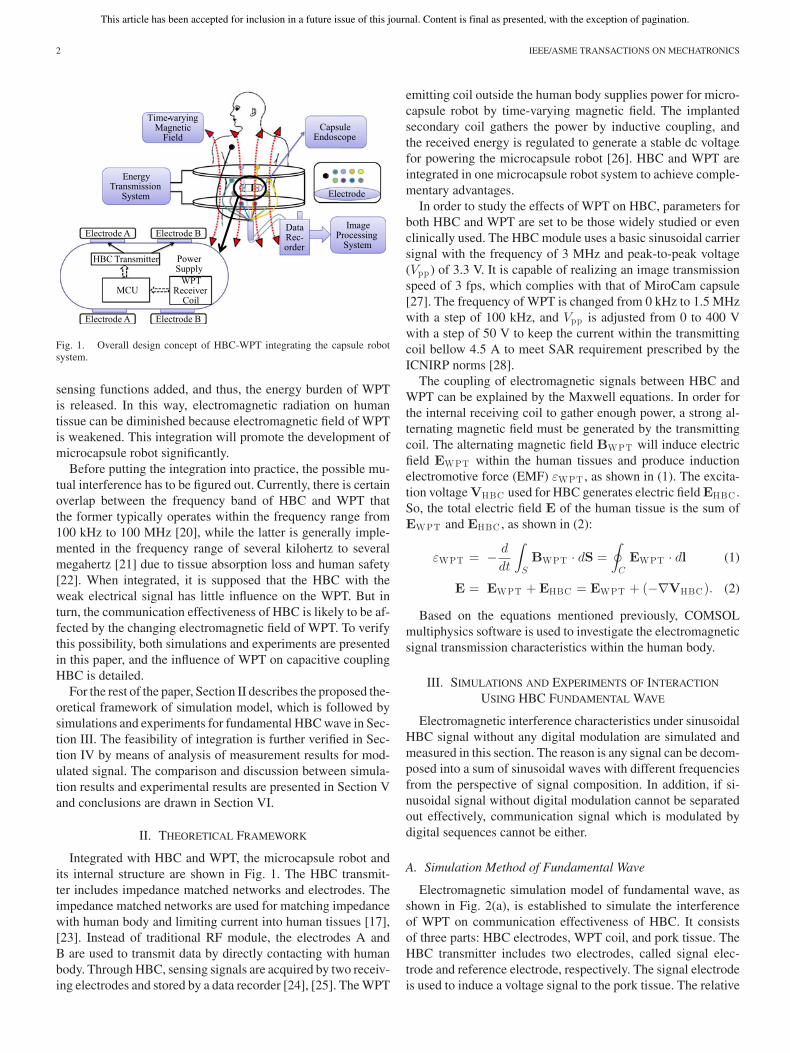
Fig. 1. Overall design concept of HBC-WPT integrating the capsule robotsystem.
sensing functions added, and thus, the energy burden of WPTis released. In this way, electromagnetic radiation on humantissue can be diminished because electromagnetic field of WPTis weakened. This integration will promote the development ofmicrocapsule robot significantly.
Before putting the integration into practice, the possible mu-tual interference has to be figured out. Currently, there is certainoverlap between the frequency band of HBC and WPT thatthe former typically operates within the frequency range from100 kHz to 100 MHz [20], while the latter is generally imple-mented in the frequency range of several kilohertz to severalmegahertz [21] due to tissue absorption loss and human safety[22]. When integrated, it is supposed that the HBC with theweak electrical signal has little influence on the WPT. But inturn, the communication effectiveness of HBC is likely to be af-fected by the changing electromagnetic field of WPT. To verifythis possibility, both simulations and experiments are presentedin this paper, and the influence of WPT on capacitive couplingHBC is detailed.
For the rest of the paper, Section II describes the proposed the-oretical framework of simulation model, which is followed bysimulations and experiments for fundamental HBC wave in Sec-tion III. The feasibility of integration is further verified in Sec-tion IV by means of analysis of measurement results for mod-ulated signal. The comparison and discussion between simula-tion results and experimental results are presented in Section Vand conclusions are drawn in Section VI.
II. THEORETICAL FRAMEWORK
Integrated with HBC and WPT, the microcapsule robot andits internal structure are shown in Fig. 1. The HBC transmit-ter includes impedance matched networks and electrodes. Theimpedance matched networks are used for matching impedancewith human body and limiting current into human tissues [17],[23]. Instead of traditional RF module, the electrodes A andB are used to transmit data by directly contacting with humanbody. Through HBC, sensing signals are acquired by two receiv-ing electrodes and stored by a data recorder [24], [25]. The WPT
emitting coil outside the human body supplies power for micro-capsule robot by time-varying magnetic field. The implantedsecondary coil gathers the power by inductive coupling, andthe received energy is regulated to generate a stable dc voltagefor powering the microcapsule robot [26]. HBC and WPT areintegrated in one microcapsule robot system to achieve comple-mentary advantages.
In order to study the effects of WPT on HBC, parameters forboth HBC and WPT are set to be those widely studied or evenclinically used. The HBC module uses a basic sinusoidal carriersignal with the frequency of 3 MHz and peak-to-peak voltage(Vpp ) of 3.3 V. It is capable of realizing an image transmissionspeed of 3 fps, which complies with that of MiroCam capsule[27]. The frequency of WPT is changed from 0 kHz to 1.5 MHzwith a step of 100 kHz, and Vpp is adjusted from 0 to 400 Vwith a step of 50 V to keep the current within the transmittingcoil bellow 4.5 A to meet SAR requirement prescribed by theICNIRP norms [28].
The coupling of electromagnetic signals between HBC andWPT can be explained by the Maxwell equations. In order forthe internal receiving coil to gather enough power, a strong al-ternating magnetic field must be generated by the transmittingcoil. The alternating magnetic field BWPT will induce electricfield EWPT within the human tissues and produce inductionelectromotive force (EMF) εWPT , as shown in (1). The excita-tion voltage VHBC used for HBC generates electric field EHBC .So, the total electric field E of the human tissue is the sum ofEWPT and EHBC , as shown in (2):
εWPT = − d
dt
∫S
BWPT · dS =∮
C
EWPT · dl (1)
E = EWPT + EHBC = EWPT + (−∇VHBC). (2)
Based on the equations mentioned previously, COMSOLmultiphysics software is used to investigate the electromagneticsignal transmission characteristics within the human body.
III. SIMULATIONS AND EXPERIMENTS OF INTERACTION
USING HBC FUNDAMENTAL WAVE
Electromagnetic interference characteristics under sinusoidalHBC signal without any digital modulation are simulated andmeasured in this section. The reason is any signal can be decom-posed into a sum of sinusoidal waves with different frequenciesfrom the perspective of signal composition. In addition, if si-nusoidal signal without digital modulation cannot be separatedout effectively, communication signal which is modulated bydigital sequences cannot be either.
A. Simulation Method of Fundamental Wave
Electromagnetic simulation model of fundamental wave, asshown in Fig. 2(a), is established to simulate the interferenceof WPT on communication effectiveness of HBC. It consistsof three parts: HBC electrodes, WPT coil, and pork tissue. TheHBC transmitter includes two electrodes, called signal elec-trode and reference electrode, respectively. The signal electrodeis used to induce a voltage signal to the pork tissue. The relative
This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
ZHANG et al.: EFFECTS OF W P T ON CAPACITIVE COUPLING H B C 3
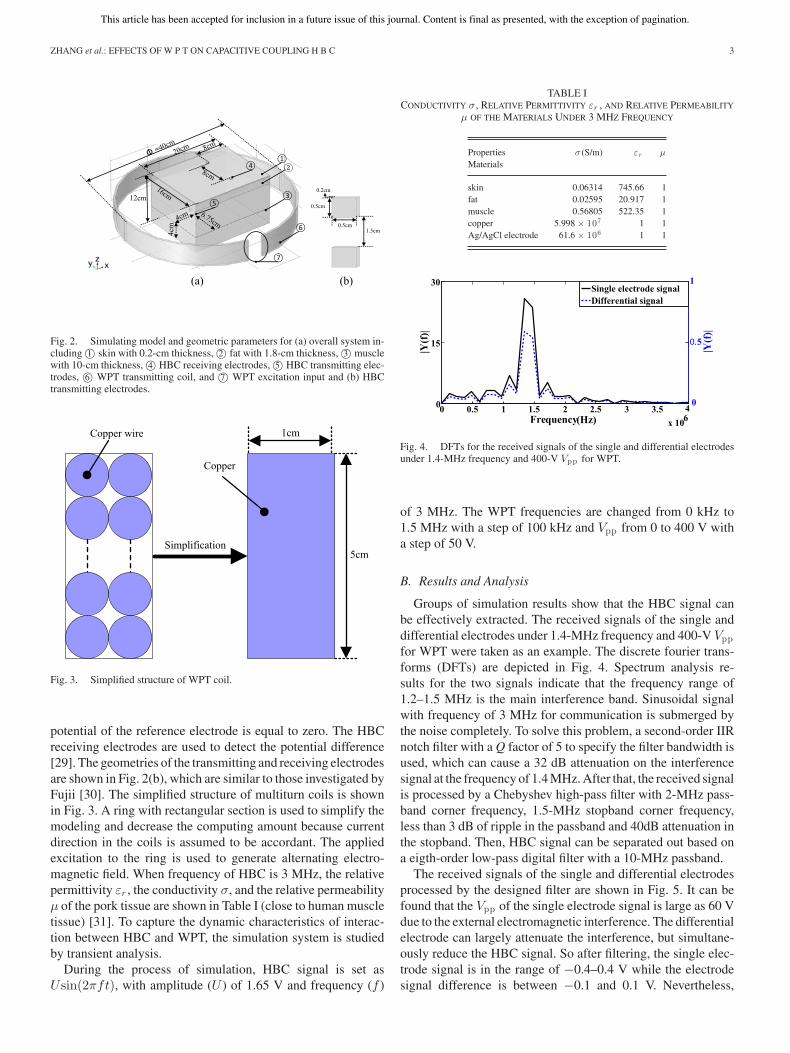
Fig. 2. Simulating model and geometric parameters for (a) overall system in-cluding ©1 skin with 0.2-cm thickness, ©2 fat with 1.8-cm thickness, ©3 musclewith 10-cm thickness, ©4 HBC receiving electrodes, ©5 HBC transmitting elec-trodes, ©6 WPT transmitting coil, and ©7 WPT excitation input and (b) HBCtransmitting electrodes.
Fig. 3. Simplified structure of WPT coil.
potential of the reference electrode is equal to zero. The HBCreceiving electrodes are used to detect the potential difference[29]. The geometries of the transmitting and receiving electrodesare shown in Fig. 2(b), which are similar to those investigated byFujii [30]. The simplified structure of multiturn coils is shownin Fig. 3. A ring with rectangular section is used to simplify themodeling and decrease the computing amount because currentdirection in the coils is assumed to be accordant. The appliedexcitation to the ring is used to generate alternating electro-magnetic field. When frequency of HBC is 3 MHz, the relativepermittivity εr , the conductivity σ, and the relative permeabilityμ of the pork tissue are shown in Table I (close to human muscletissue) [31]. To capture the dynamic characteristics of interac-tion between HBC and WPT, the simulation system is studiedby transient analysis.
During the process of simulation, HBC signal is set asUsin(2πft), with amplitude (U ) of 1.65 V and frequency (f )
TABLE ICONDUCTIVITY σ, RELATIVE PERMITTIVITY εr , AND RELATIVE PERMEABILITY
μ OF THE MATERIALS UNDER 3 MHZ FREQUENCY
Properties σ (S/m) εr μ
Materials
skin 0.06314 745.66 1fat 0.02595 20.917 1muscle 0.56805 522.35 1copper 5.998 × 107 1 1Ag/AgCl electrode 61.6 × 106 1 1
Fig. 4. DFTs for the received signals of the single and differential electrodesunder 1.4-MHz frequency and 400-V Vpp for WPT.
of 3 MHz. The WPT frequencies are changed from 0 kHz to1.5 MHz with a step of 100 kHz and Vpp from 0 to 400 V witha step of 50 V.
B. Results and Analysis
Groups of simulation results show that the HBC signal canbe effectively extracted. The received signals of the single anddifferential electrodes under 1.4-MHz frequency and 400-V Vppfor WPT were taken as an example. The discrete fourier trans-forms (DFTs) are depicted in Fig. 4. Spectrum analysis re-sults for the two signals indicate that the frequency range of1.2–1.5 MHz is the main interference band. Sinusoidal signalwith frequency of 3 MHz for communication is submerged bythe noise completely. To solve this problem, a second-order IIRnotch filter with a Q factor of 5 to specify the filter bandwidth isused, which can cause a 32 dB attenuation on the interferencesignal at the frequency of 1.4 MHz. After that, the received signalis processed by a Chebyshev high-pass filter with 2-MHz pass-band corner frequency, 1.5-MHz stopband corner frequency,less than 3 dB of ripple in the passband and 40dB attenuation inthe stopband. Then, HBC signal can be separated out based ona eigth-order low-pass digital filter with a 10-MHz passband.
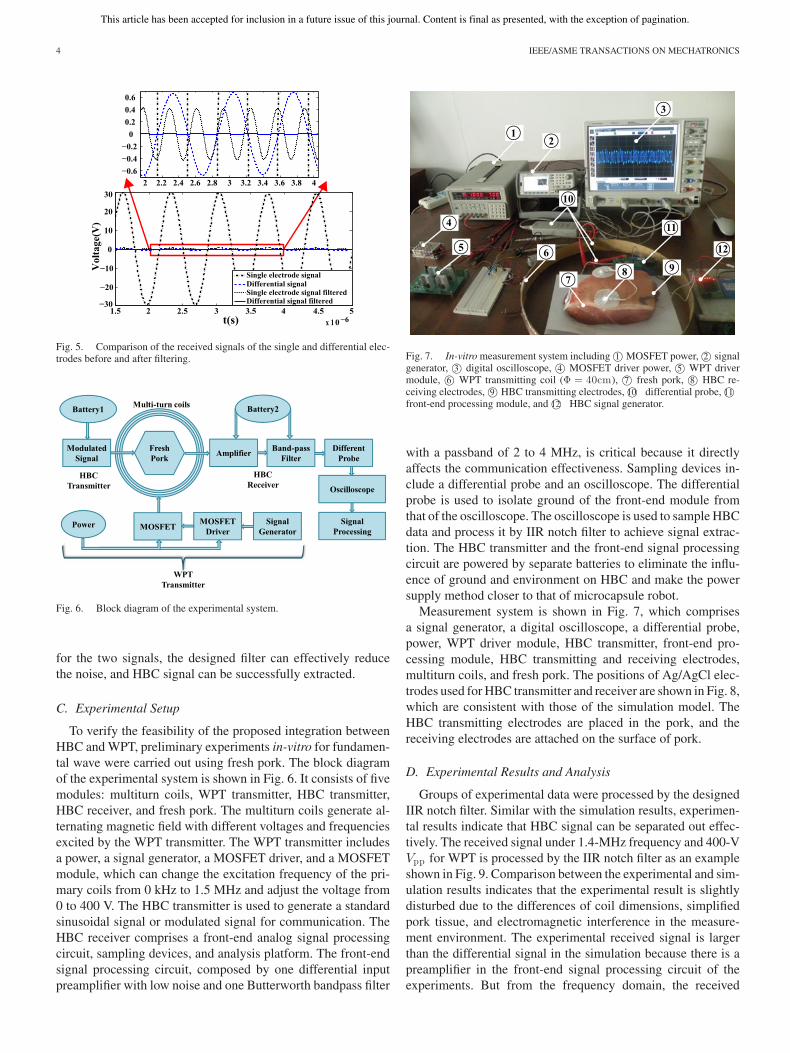
The received signals of the single and differential electrodesprocessed by the designed filter are shown in Fig. 5. It can befound that the Vpp of the single electrode signal is large as 60 Vdue to the external electromagnetic interference. The differentialelectrode can largely attenuate the interference, but simultane-ously reduce the HBC signal. So after filtering, the single elec-trode signal is in the range of −0.4–0.4 V while the electrodesignal difference is between −0.1 and 0.1 V. Nevertheless,
This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
4 IEEE/ASME TRANSACTIONS ON MECHATRONICS
Fig. 5. Comparison of the received signals of the single and differential elec-trodes before and after filtering.
Fig. 6. Block diagram of the experimental system.
for the two signals, the designed filter can effectively reducethe noise, and HBC signal can be successfully extracted.
C. Experimental Setup
To verify the feasibility of the proposed integration betweenHBC and WPT, preliminary experiments in-vitro for fundamen-tal wave were carried out using fresh pork. The block diagramof the experimental system is shown in Fig. 6. It consists of fivemodules: multiturn coils, WPT transmitter, HBC transmitter,HBC receiver, and fresh pork. The multiturn coils generate al-ternating magnetic field with different voltages and frequenciesexcited by the WPT transmitter. The WPT transmitter includesa power, a signal generator, a MOSFET driver, and a MOSFETmodule, which can change the excitation frequency of the pri-mary coils from 0 kHz to 1.5 MHz and adjust the voltage from0 to 400 V. The HBC transmitter is used to generate a standardsinusoidal signal or modulated signal for communication. TheHBC receiver comprises a front-end analog signal processingcircuit, sampling devices, and analysis platform. The front-endsignal processing circuit, composed by one differential inputpreamplifier with low noise and one Butterworth bandpass filter
Fig. 7. In-vitro measurement system including ©1 MOSFET power, ©2 signalgenerator, ©3 digital oscilloscope, ©4 MOSFET driver power, ©5 WPT drivermodule, ©6 WPT transmitting coil (Φ = 40cm), ©7 fresh pork, ©8 HBC re-ceiving electrodes, ©9 HBC transmitting electrodes, ©10 differential probe, ©11front-end processing module, and ©12 HBC signal generator.
with a passband of 2 to 4 MHz, is critical because it directlyaffects the communication effectiveness. Sampling devices in-clude a differential probe and an oscilloscope. The differentialprobe is used to isolate ground of the front-end module fromthat of the oscilloscope. The oscilloscope is used to sample HBCdata and process it by IIR notch filter to achieve signal extrac-tion. The HBC transmitter and the front-end signal processingcircuit are powered by separate batteries to eliminate the influ-ence of ground and environment on HBC and make the powersupply method closer to that of microcapsule robot.
Measurement system is shown in Fig. 7, which comprisesa signal generator, a digital oscilloscope, a differential probe,power, WPT driver module, HBC transmitter, front-end pro-cessing module, HBC transmitting and receiving electrodes,multiturn coils, and fresh pork. The positions of Ag/AgCl elec-trodes used for HBC transmitter and receiver are shown in Fig. 8,which are consistent with those of the simulation model. TheHBC transmitting electrodes are placed in the pork, and thereceiving electrodes are attached on the surface of pork.
D. Experimental Results and Analysis
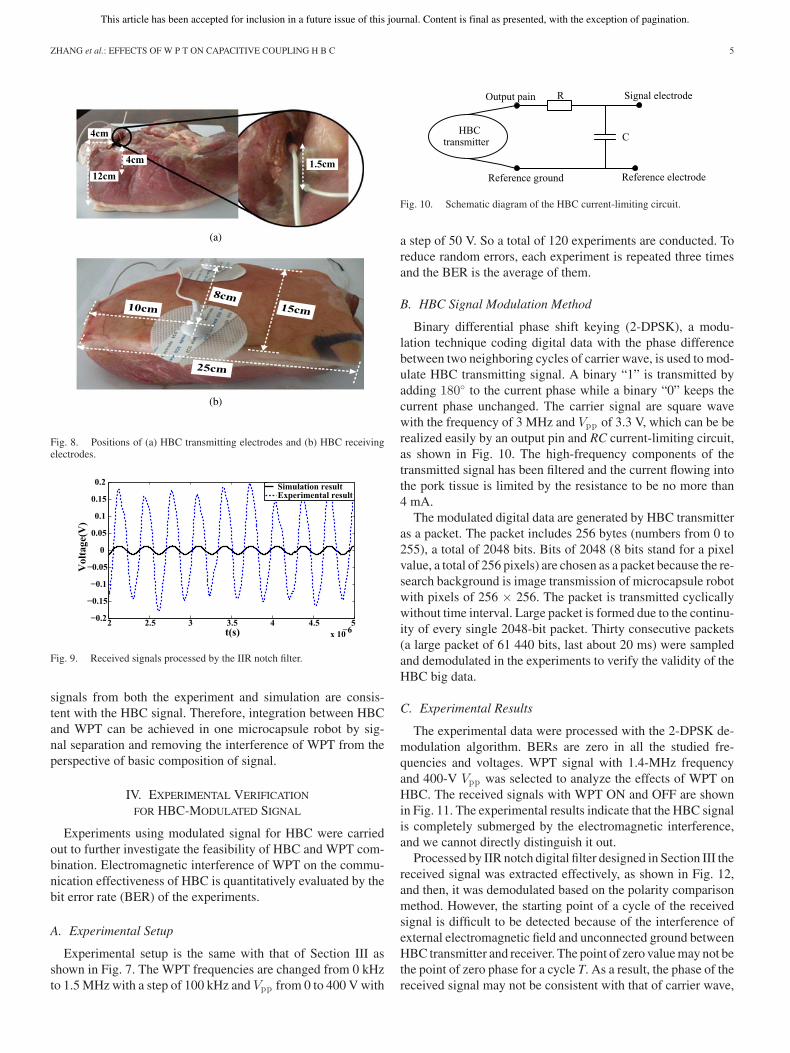
Groups of experimental data were processed by the designedIIR notch filter. Similar with the simulation results, experimen-tal results indicate that HBC signal can be separated out effec-tively. The received signal under 1.4-MHz frequency and 400-VVpp for WPT is processed by the IIR notch filter as an exampleshown in Fig. 9. Comparison between the experimental and sim-ulation results indicates that the experimental result is slightlydisturbed due to the differences of coil dimensions, simplifiedpork tissue, and electromagnetic interference in the measure-ment environment. The experimental received signal is largerthan the differential signal in the simulation because there is apreamplifier in the front-end signal processing circuit of theexperiments. But from the frequency domain, the received
This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
ZHANG et al.: EFFECTS OF W P T ON CAPACITIVE COUPLING H B C 5
Fig. 8. Positions of (a) HBC transmitting electrodes and (b) HBC receivingelectrodes.
Fig. 9. Received signals processed by the IIR notch filter.
signals from both the experiment and simulation are consis-tent with the HBC signal. Therefore, integration between HBCand WPT can be achieved in one microcapsule robot by sig-nal separation and removing the interference of WPT from theperspective of basic composition of signal.
IV. EXPERIMENTAL VERIFICATION
FOR HBC-MODULATED SIGNAL
Experiments using modulated signal for HBC were carriedout to further investigate the feasibility of HBC and WPT com-bination. Electromagnetic interference of WPT on the commu-nication effectiveness of HBC is quantitatively evaluated by thebit error rate (BER) of the experiments.
A. Experimental Setup
Experimental setup is the same with that of Section III asshown in Fig. 7. The WPT frequencies are changed from 0 kHzto 1.5 MHz with a step of 100 kHz and Vpp from 0 to 400 V with
Fig. 10. Schematic diagram of the HBC current-limiting circuit.
a step of 50 V. So a total of 120 experiments are conducted. Toreduce random errors, each experiment is repeated three timesand the BER is the average of them.
B. HBC Signal Modulation Method
Binary differential phase shift keying (2-DPSK), a modu-lation technique coding digital data with the phase differencebetween two neighboring cycles of carrier wave, is used to mod-ulate HBC transmitting signal. A binary “1” is transmitted byadding 180◦ to the current phase while a binary “0” keeps thecurrent phase unchanged. The carrier signal are square wavewith the frequency of 3 MHz and Vpp of 3.3 V, which can be berealized easily by an output pin and RC current-limiting circuit,as shown in Fig. 10. The high-frequency components of thetransmitted signal has been filtered and the current flowing intothe pork tissue is limited by the resistance to be no more than4 mA.
The modulated digital data are generated by HBC transmitteras a packet. The packet includes 256 bytes (numbers from 0 to255), a total of 2048 bits. Bits of 2048 (8 bits stand for a pixelvalue, a total of 256 pixels) are chosen as a packet because the re-search background is image transmission of microcapsule robotwith pixels of 256 × 256. The packet is transmitted cyclicallywithout time interval. Large packet is formed due to the continu-ity of every single 2048-bit packet. Thirty consecutive packets(a large packet of 61 440 bits, last about 20 ms) were sampledand demodulated in the experiments to verify the validity of theHBC big data.
C. Experimental Results
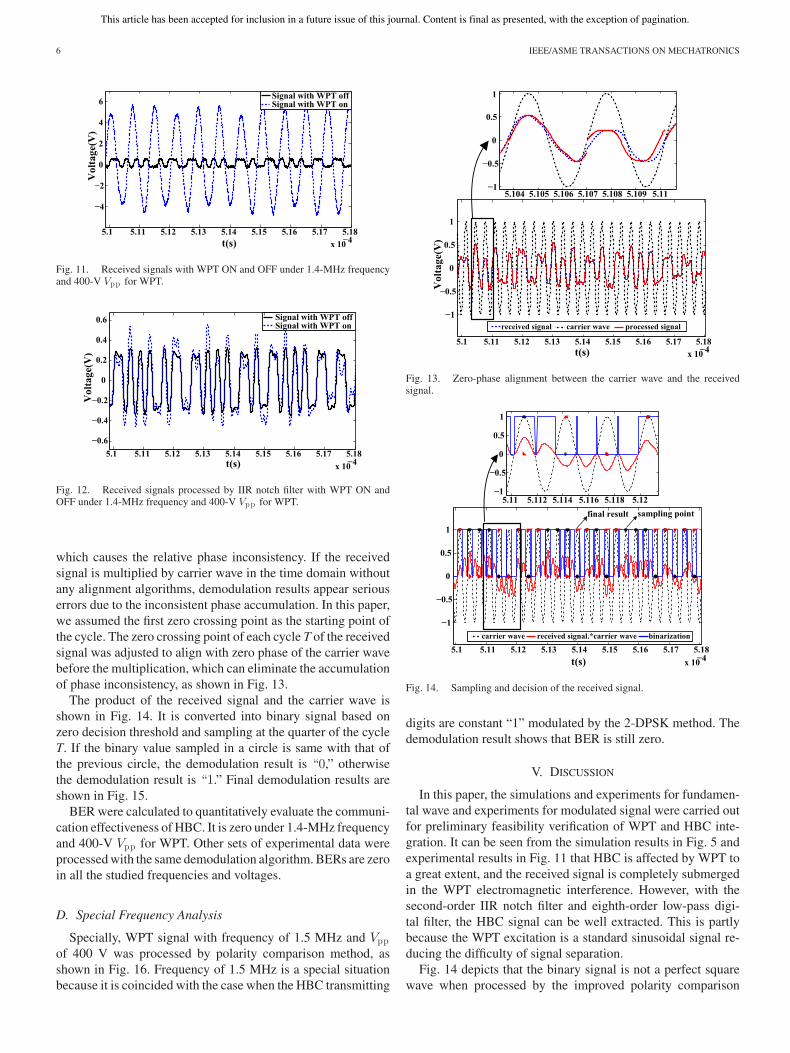
The experimental data were processed with the 2-DPSK de-modulation algorithm. BERs are zero in all the studied fre-quencies and voltages. WPT signal with 1.4-MHz frequencyand 400-V Vpp was selected to analyze the effects of WPT onHBC. The received signals with WPT ON and OFF are shownin Fig. 11. The experimental results indicate that the HBC signalis completely submerged by the electromagnetic interference,and we cannot directly distinguish it out.
Processed by IIR notch digital filter designed in Section III thereceived signal was extracted effectively, as shown in Fig. 12,and then, it was demodulated based on the polarity comparisonmethod. However, the starting point of a cycle of the receivedsignal is difficult to be detected because of the interference ofexternal electromagnetic field and unconnected ground betweenHBC transmitter and receiver. The point of zero value may not bethe point of zero phase for a cycle T. As a result, the phase of thereceived signal may not be consistent with that of carrier wave,
This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
6 IEEE/ASME TRANSACTIONS ON MECHATRONICS
Fig. 11. Received signals with WPT ON and OFF under 1.4-MHz frequencyand 400-V Vpp for WPT.
Fig. 12. Received signals processed by IIR notch filter with WPT ON andOFF under 1.4-MHz frequency and 400-V Vpp for WPT.
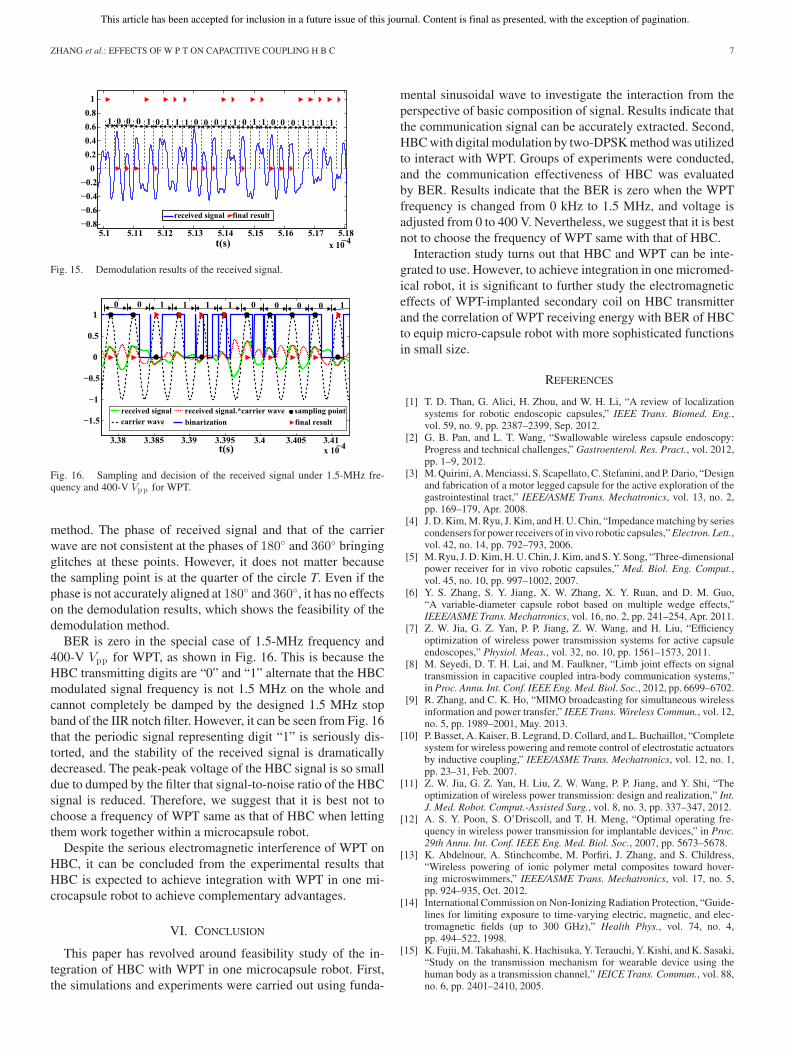
which causes the relative phase inconsistency. If the receivedsignal is multiplied by carrier wave in the time domain withoutany alignment algorithms, demodulation results appear seriouserrors due to the inconsistent phase accumulation. In this paper,we assumed the first zero crossing point as the starting point ofthe cycle. The zero crossing point of each cycle T of the receivedsignal was adjusted to align with zero phase of the carrier wavebefore the multiplication, which can eliminate the accumulationof phase inconsistency, as shown in Fig. 13.
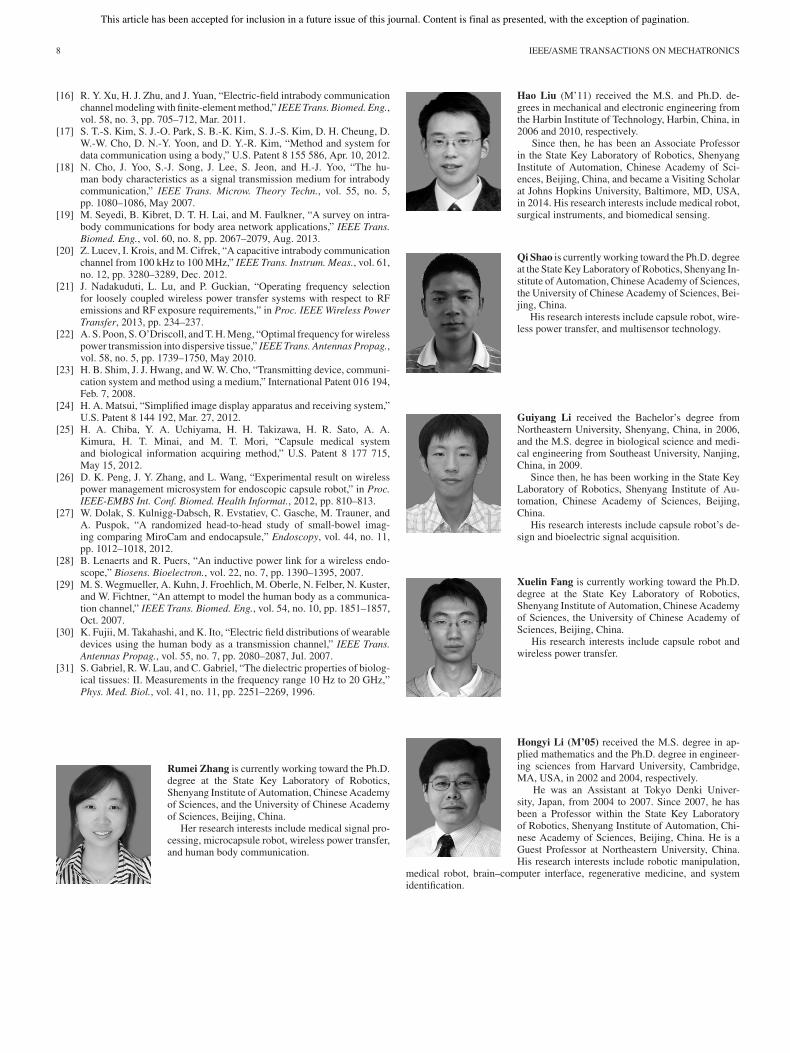
The product of the received signal and the carrier wave isshown in Fig. 14. It is converted into binary signal based onzero decision threshold and sampling at the quarter of the cycleT. If the binary value sampled in a circle is same with that ofthe previous circle, the demodulation result is “0,” otherwisethe demodulation result is “1.” Final demodulation results areshown in Fig. 15.
BER were calculated to quantitatively evaluate the communi-cation effectiveness of HBC. It is zero under 1.4-MHz frequencyand 400-V Vpp for WPT. Other sets of experimental data wereprocessed with the same demodulation algorithm. BERs are zeroin all the studied frequencies and voltages.
D. Special Frequency Analysis
Specially, WPT signal with frequency of 1.5 MHz and Vppof 400 V was processed by polarity comparison method, asshown in Fig. 16. Frequency of 1.5 MHz is a special situationbecause it is coincided with the case when the HBC transmitting
Fig. 13. Zero-phase alignment between the carrier wave and the receivedsignal.
Fig. 14. Sampling and decision of the received signal.
digits are constant “1” modulated by the 2-DPSK method. Thedemodulation result shows that BER is still zero.
V. DISCUSSION
In this paper, the simulations and experiments for fundamen-tal wave and experiments for modulated signal were carried outfor preliminary feasibility verification of WPT and HBC inte-gration. It can be seen from the simulation results in Fig. 5 andexperimental results in Fig. 11 that HBC is affected by WPT toa great extent, and the received signal is completely submergedin the WPT electromagnetic interference. However, with thesecond-order IIR notch filter and eighth-order low-pass digi-tal filter, the HBC signal can be well extracted. This is partlybecause the WPT excitation is a standard sinusoidal signal re-ducing the difficulty of signal separation.
Fig. 14 depicts that the binary signal is not a perfect squarewave when processed by the improved polarity comparison
This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
ZHANG et al.: EFFECTS OF W P T ON CAPACITIVE COUPLING H B C 7
Fig. 15. Demodulation results of the received signal.
Fig. 16. Sampling and decision of the received signal under 1.5-MHz fre-quency and 400-V Vpp for WPT.
method. The phase of received signal and that of the carrierwave are not consistent at the phases of 180◦ and 360◦ bringingglitches at these points. However, it does not matter becausethe sampling point is at the quarter of the circle T. Even if thephase is not accurately aligned at 180◦ and 360◦, it has no effectson the demodulation results, which shows the feasibility of thedemodulation method.
BER is zero in the special case of 1.5-MHz frequency and400-V Vpp for WPT, as shown in Fig. 16. This is because theHBC transmitting digits are “0” and “1” alternate that the HBCmodulated signal frequency is not 1.5 MHz on the whole andcannot completely be damped by the designed 1.5 MHz stopband of the IIR notch filter. However, it can be seen from Fig. 16that the periodic signal representing digit “1” is seriously dis-torted, and the stability of the received signal is dramaticallydecreased. The peak-peak voltage of the HBC signal is so smalldue to dumped by the filter that signal-to-noise ratio of the HBCsignal is reduced. Therefore, we suggest that it is best not tochoose a frequency of WPT same as that of HBC when lettingthem work together within a microcapsule robot.
Despite the serious electromagnetic interference of WPT onHBC, it can be concluded from the experimental results thatHBC is expected to achieve integration with WPT in one mi-crocapsule robot to achieve complementary advantages.
VI. CONCLUSION
This paper has revolved around feasibility study of the in-tegration of HBC with WPT in one microcapsule robot. First,the simulations and experiments were carried out using funda-
mental sinusoidal wave to investigate the interaction from theperspective of basic composition of signal. Results indicate thatthe communication signal can be accurately extracted. Second,HBC with digital modulation by two-DPSK method was utilizedto interact with WPT. Groups of experiments were conducted,and the communication effectiveness of HBC was evaluatedby BER. Results indicate that the BER is zero when the WPTfrequency is changed from 0 kHz to 1.5 MHz, and voltage isadjusted from 0 to 400 V. Nevertheless, we suggest that it is bestnot to choose the frequency of WPT same with that of HBC.
Interaction study turns out that HBC and WPT can be inte-grated to use. However, to achieve integration in one micromed-ical robot, it is significant to further study the electromagneticeffects of WPT-implanted secondary coil on HBC transmitterand the correlation of WPT receiving energy with BER of HBCto equip micro-capsule robot with more sophisticated functionsin small size.
REFERENCES
[1] T. D. Than, G. Alici, H. Zhou, and W. H. Li, “A review of localizationsystems for robotic endoscopic capsules,” IEEE Trans. Biomed. Eng.,vol. 59, no. 9, pp. 2387–2399, Sep. 2012.
[2] G. B. Pan, and L. T. Wang, “Swallowable wireless capsule endoscopy:Progress and technical challenges,” Gastroenterol. Res. Pract., vol. 2012,pp. 1–9, 2012.
[3] M. Quirini, A. Menciassi, S. Scapellato, C. Stefanini, and P. Dario, “Designand fabrication of a motor legged capsule for the active exploration of thegastrointestinal tract,” IEEE/ASME Trans. Mechatronics, vol. 13, no. 2,pp. 169–179, Apr. 2008.
[4] J. D. Kim, M. Ryu, J. Kim, and H. U. Chin, “Impedance matching by seriescondensers for power receivers of in vivo robotic capsules,” Electron. Lett.,vol. 42, no. 14, pp. 792–793, 2006.
[5] M. Ryu, J. D. Kim, H. U. Chin, J. Kim, and S. Y. Song, “Three-dimensionalpower receiver for in vivo robotic capsules,” Med. Biol. Eng. Comput.,vol. 45, no. 10, pp. 997–1002, 2007.
[6] Y. S. Zhang, S. Y. Jiang, X. W. Zhang, X. Y. Ruan, and D. M. Guo,“A variable-diameter capsule robot based on multiple wedge effects,”IEEE/ASME Trans. Mechatronics, vol. 16, no. 2, pp. 241–254, Apr. 2011.
[7] Z. W. Jia, G. Z. Yan, P. P. Jiang, Z. W. Wang, and H. Liu, “Efficiencyoptimization of wireless power transmission systems for active capsuleendoscopes,” Physiol. Meas., vol. 32, no. 10, pp. 1561–1573, 2011.
[8] M. Seyedi, D. T. H. Lai, and M. Faulkner, “Limb joint effects on signaltransmission in capacitive coupled intra-body communication systems,”in Proc. Annu. Int. Conf. IEEE Eng. Med. Biol. Soc., 2012, pp. 6699–6702.
[9] R. Zhang, and C. K. Ho, “MIMO broadcasting for simultaneous wirelessinformation and power transfer,” IEEE Trans. Wireless Commun., vol. 12,no. 5, pp. 1989–2001, May. 2013.
[10] P. Basset, A. Kaiser, B. Legrand, D. Collard, and L. Buchaillot, “Completesystem for wireless powering and remote control of electrostatic actuatorsby inductive coupling,” IEEE/ASME Trans. Mechatronics, vol. 12, no. 1,pp. 23–31, Feb. 2007.
[11] Z. W. Jia, G. Z. Yan, H. Liu, Z. W. Wang, P. P. Jiang, and Y. Shi, “Theoptimization of wireless power transmission: design and realization,” Int.J. Med. Robot. Comput.-Assisted Surg., vol. 8, no. 3, pp. 337–347, 2012.
[12] A. S. Y. Poon, S. O’Driscoll, and T. H. Meng, “Optimal operating fre-quency in wireless power transmission for implantable devices,” in Proc.29th Annu. Int. Conf. IEEE Eng. Med. Biol. Soc., 2007, pp. 5673–5678.
[13] K. Abdelnour, A. Stinchcombe, M. Porfiri, J. Zhang, and S. Childress,“Wireless powering of ionic polymer metal composites toward hover-ing microswimmers,” IEEE/ASME Trans. Mechatronics, vol. 17, no. 5,pp. 924–935, Oct. 2012.
[14] International Commission on Non-Ionizing Radiation Protection, “Guide-lines for limiting exposure to time-varying electric, magnetic, and elec-tromagnetic fields (up to 300 GHz),” Health Phys., vol. 74, no. 4,pp. 494–522, 1998.
[15] K. Fujii, M. Takahashi, K. Hachisuka, Y. Terauchi, Y. Kishi, and K. Sasaki,“Study on the transmission mechanism for wearable device using thehuman body as a transmission channel,” IEICE Trans. Commun., vol. 88,no. 6, pp. 2401–2410, 2005.
This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
8 IEEE/ASME TRANSACTIONS ON MECHATRONICS
[16] R. Y. Xu, H. J. Zhu, and J. Yuan, “Electric-field intrabody communicationchannel modeling with finite-element method,” IEEE Trans. Biomed. Eng.,vol. 58, no. 3, pp. 705–712, Mar. 2011.
[17] S. T.-S. Kim, S. J.-O. Park, S. B.-K. Kim, S. J.-S. Kim, D. H. Cheung, D.W.-W. Cho, D. N.-Y. Yoon, and D. Y.-R. Kim, “Method and system fordata communication using a body,” U.S. Patent 8 155 586, Apr. 10, 2012.
[18] N. Cho, J. Yoo, S.-J. Song, J. Lee, S. Jeon, and H.-J. Yoo, “The hu-man body characteristics as a signal transmission medium for intrabodycommunication,” IEEE Trans. Microw. Theory Techn., vol. 55, no. 5,pp. 1080–1086, May 2007.
[19] M. Seyedi, B. Kibret, D. T. H. Lai, and M. Faulkner, “A survey on intra-body communications for body area network applications,” IEEE Trans.Biomed. Eng., vol. 60, no. 8, pp. 2067–2079, Aug. 2013.
[20] Z. Lucev, I. Krois, and M. Cifrek, “A capacitive intrabody communicationchannel from 100 kHz to 100 MHz,” IEEE Trans. Instrum. Meas., vol. 61,no. 12, pp. 3280–3289, Dec. 2012.
[21] J. Nadakuduti, L. Lu, and P. Guckian, “Operating frequency selectionfor loosely coupled wireless power transfer systems with respect to RFemissions and RF exposure requirements,” in Proc. IEEE Wireless PowerTransfer, 2013, pp. 234–237.
[22] A. S. Poon, S. O’Driscoll, and T. H. Meng, “Optimal frequency for wirelesspower transmission into dispersive tissue,” IEEE Trans. Antennas Propag.,vol. 58, no. 5, pp. 1739–1750, May 2010.
[23] H. B. Shim, J. J. Hwang, and W. W. Cho, “Transmitting device, communi-cation system and method using a medium,” International Patent 016 194,Feb. 7, 2008.
[24] H. A. Matsui, “Simplified image display apparatus and receiving system,”U.S. Patent 8 144 192, Mar. 27, 2012.
[25] H. A. Chiba, Y. A. Uchiyama, H. H. Takizawa, H. R. Sato, A. A.Kimura, H. T. Minai, and M. T. Mori, “Capsule medical systemand biological information acquiring method,” U.S. Patent 8 177 715,May 15, 2012.
[26] D. K. Peng, J. Y. Zhang, and L. Wang, “Experimental result on wirelesspower management microsystem for endoscopic capsule robot,” in Proc.IEEE-EMBS Int. Conf. Biomed. Health Informat., 2012, pp. 810–813.
[27] W. Dolak, S. Kulnigg-Dabsch, R. Evstatiev, C. Gasche, M. Trauner, andA. Puspok, “A randomized head-to-head study of small-bowel imag-ing comparing MiroCam and endocapsule,” Endoscopy, vol. 44, no. 11,pp. 1012–1018, 2012.
[28] B. Lenaerts and R. Puers, “An inductive power link for a wireless endo-scope,” Biosens. Bioelectron., vol. 22, no. 7, pp. 1390–1395, 2007.
[29] M. S. Wegmueller, A. Kuhn, J. Froehlich, M. Oberle, N. Felber, N. Kuster,and W. Fichtner, “An attempt to model the human body as a communica-tion channel,” IEEE Trans. Biomed. Eng., vol. 54, no. 10, pp. 1851–1857,Oct. 2007.
[30] K. Fujii, M. Takahashi, and K. Ito, “Electric field distributions of wearabledevices using the human body as a transmission channel,” IEEE Trans.Antennas Propag., vol. 55, no. 7, pp. 2080–2087, Jul. 2007.
[31] S. Gabriel, R. W. Lau, and C. Gabriel, “The dielectric properties of biolog-ical tissues: II. Measurements in the frequency range 10 Hz to 20 GHz,”Phys. Med. Biol., vol. 41, no. 11, pp. 2251–2269, 1996.
Rumei Zhang is currently working toward the Ph.D.degree at the State Key Laboratory of Robotics,Shenyang Institute of Automation, Chinese Academyof Sciences, and the University of Chinese Academyof Sciences, Beijing, China.
Her research interests include medical signal pro-cessing, microcapsule robot, wireless power transfer,and human body communication.
Hao Liu (M’11) received the M.S. and Ph.D. de-grees in mechanical and electronic engineering fromthe Harbin Institute of Technology, Harbin, China, in2006 and 2010, respectively.
Since then, he has been an Associate Professorin the State Key Laboratory of Robotics, ShenyangInstitute of Automation, Chinese Academy of Sci-ences, Beijing, China, and became a Visiting Scholarat Johns Hopkins University, Baltimore, MD, USA,in 2014. His research interests include medical robot,surgical instruments, and biomedical sensing.
Qi Shao is currently working toward the Ph.D. degreeat the State Key Laboratory of Robotics, Shenyang In-stitute of Automation, Chinese Academy of Sciences,the University of Chinese Academy of Sciences, Bei-jing, China.
His research interests include capsule robot, wire-less power transfer, and multisensor technology.
Guiyang Li received the Bachelor’s degree fromNortheastern University, Shenyang, China, in 2006,and the M.S. degree in biological science and medi-cal engineering from Southeast University, Nanjing,China, in 2009.
Since then, he has been working in the State KeyLaboratory of Robotics, Shenyang Institute of Au-tomation, Chinese Academy of Sciences, Beijing,China.
His research interests include capsule robot’s de-sign and bioelectric signal acquisition.
Xuelin Fang is currently working toward the Ph.D.degree at the State Key Laboratory of Robotics,Shenyang Institute of Automation, Chinese Academyof Sciences, the University of Chinese Academy ofSciences, Beijing, China.
His research interests include capsule robot andwireless power transfer.
Hongyi Li (M’05) received the M.S. degree in ap-plied mathematics and the Ph.D. degree in engineer-ing sciences from Harvard University, Cambridge,MA, USA, in 2002 and 2004, respectively.
He was an Assistant at Tokyo Denki Univer-sity, Japan, from 2004 to 2007. Since 2007, he hasbeen a Professor within the State Key Laboratoryof Robotics, Shenyang Institute of Automation, Chi-nese Academy of Sciences, Beijing, China. He is aGuest Professor at Northeastern University, China.His research interests include robotic manipulation,
medical robot, brain–computer interface, regenerative medicine, and systemidentification.








![Aalborg Universitet Analysis, design and implementation of ... · capacitive [14]. The capacitive coupling branch reduces the operational voltage of the CGCI when leading reactive](https://img.pdfslide.us/doc/110x75/5e1654b4976d2152bf379f84/aalborg-universitet-analysis-design-and-implementation-of-capacitive-14.jpg)



















