Embed Size (px)
DESCRIPTION
EE255/CPS226 Expected Value and Higher Moments. Dept. of Electrical & Computer engineering Duke University Email: [email protected] , [email protected]. Expected (Mean, Average) Value. Mean, Variance and higher order moments E ( X ) may also be computed using distribution function. - PowerPoint PPT Presentation
Citation preview
04/19/23 1
EE255/CPS226Expected Value and Higher
Moments
Dept. of Electrical & Computer engineering
Duke UniversityEmail: [email protected],
Bharat B. Madan, Department of Electrical and Computer Engineering, Duke University
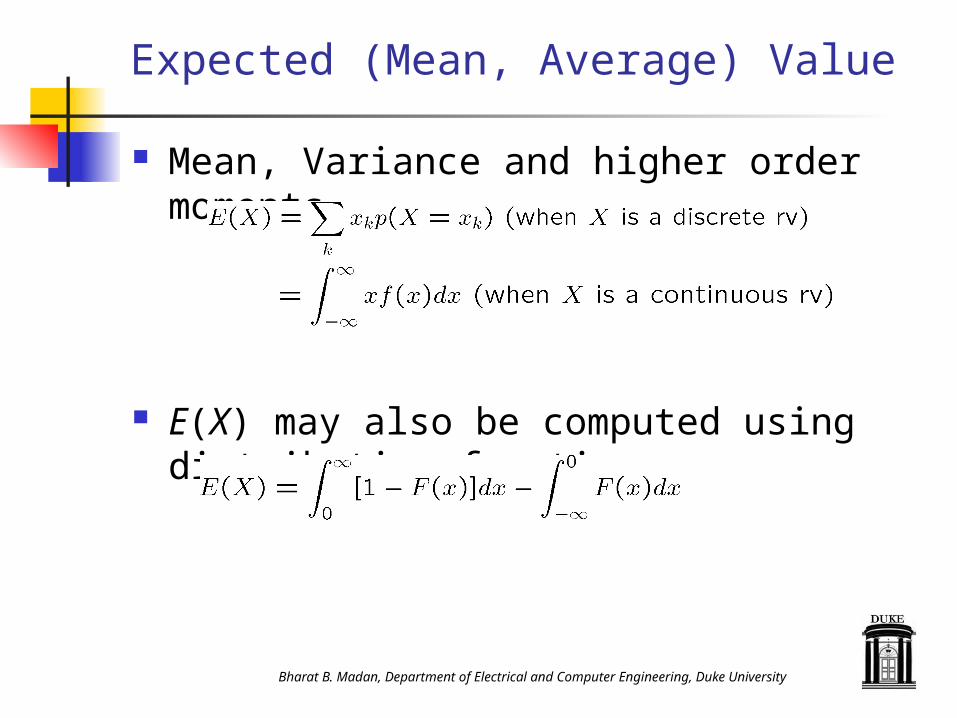
Expected (Mean, Average) Value
Mean, Variance and higher order moments
E(X) may also be computed using distribution function
Bharat B. Madan, Department of Electrical and Computer Engineering, Duke University
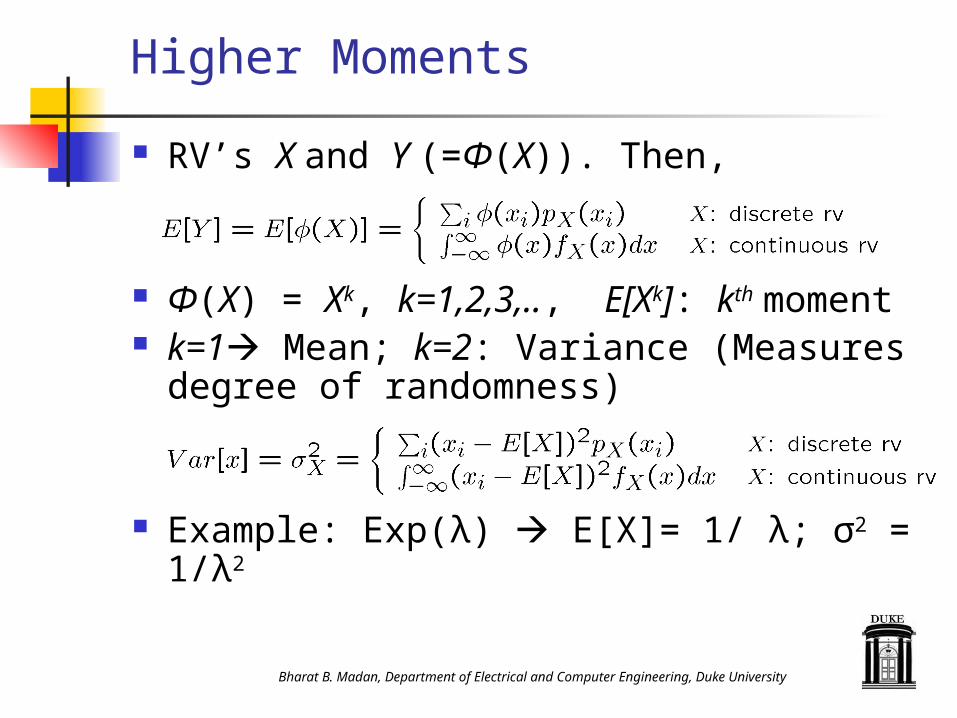
Higher Moments
RV’s X and Y (=Φ(X)). Then,
Φ(X) = Xk, k=1,2,3,.., E[Xk]: kth moment k=1 Mean; k=2: Variance (Measures degree of
randomness)
Example: Exp(λ) E[X]= 1/ λ; σ2 = 1/λ2
Bharat B. Madan, Department of Electrical and Computer Engineering, Duke University
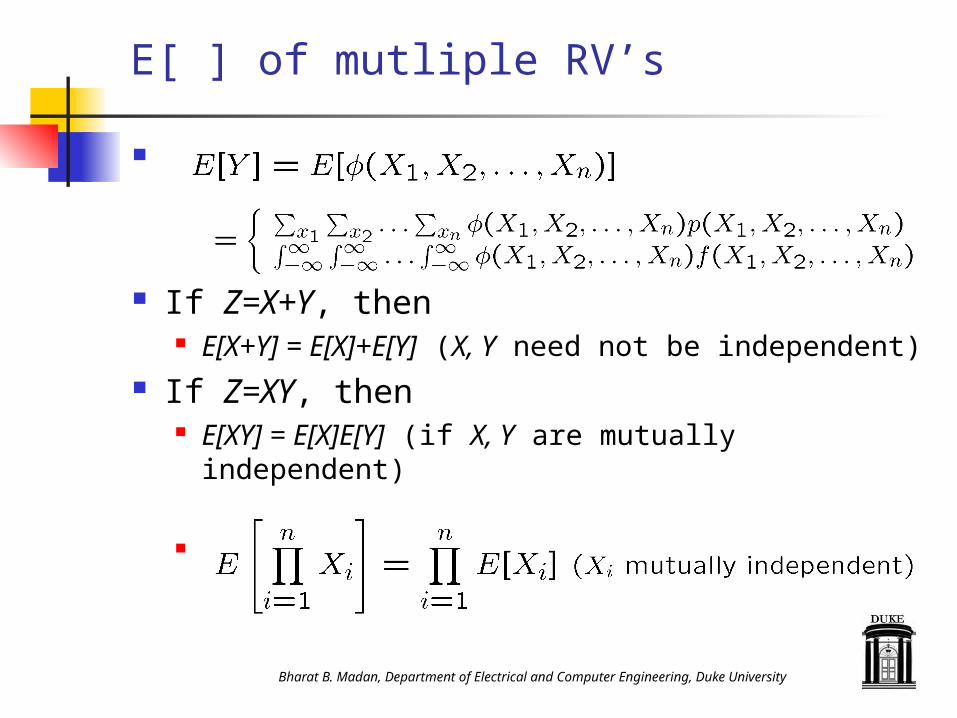
E[ ] of mutliple RV’s
If Z=X+Y, then E[X+Y] = E[X]+E[Y] (X, Y need not be independent)
If Z=XY, then E[XY] = E[X]E[Y] (if X, Y are mutually independent)
Bharat B. Madan, Department of Electrical and Computer Engineering, Duke University
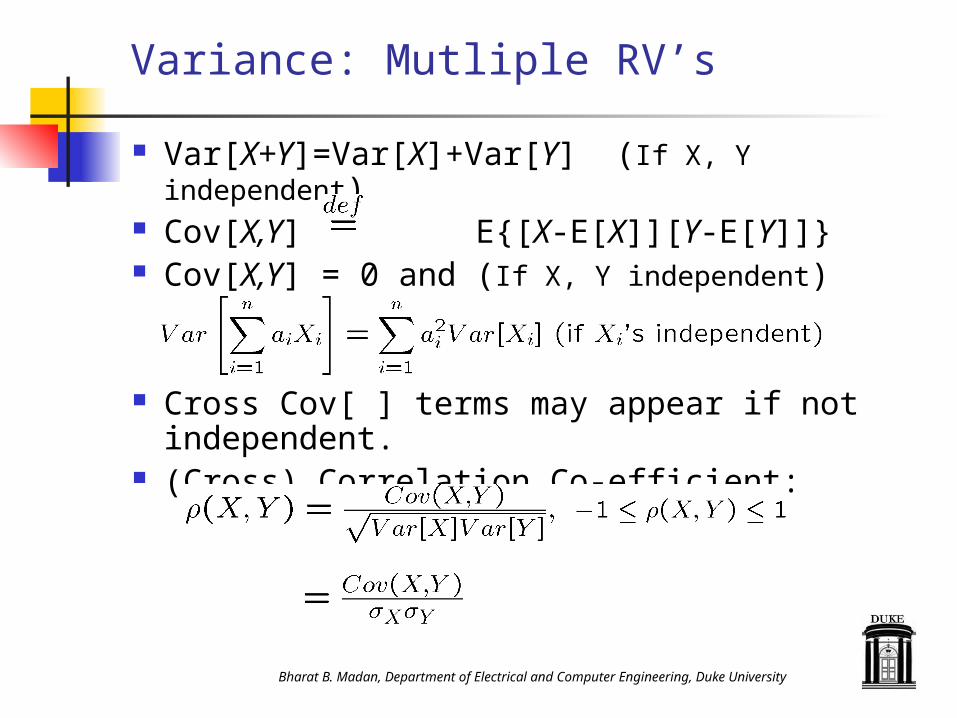
Variance: Mutliple RV’s
Var[X+Y]=Var[X]+Var[Y] (If X, Y independent) Cov[X,Y] E{[X-E[X]][Y-E[Y]]} Cov[X,Y] = 0 and (If X, Y independent)
Cross Cov[ ] terms may appear if not independent. (Cross) Correlation Co-efficient:
Bharat B. Madan, Department of Electrical and Computer Engineering, Duke University
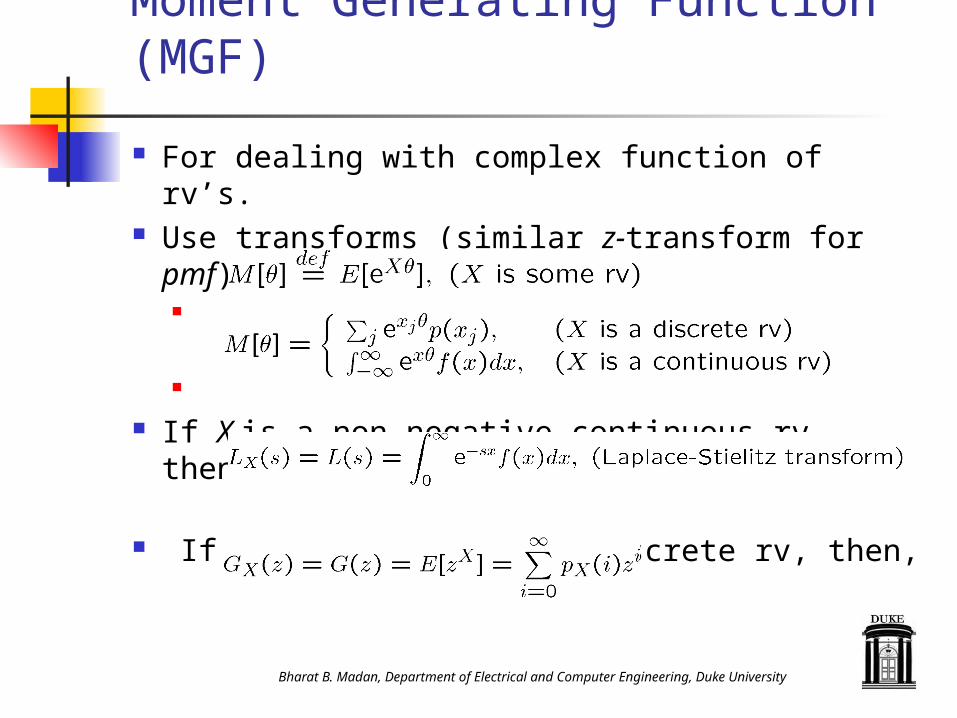
Moment Generating Function (MGF)
For dealing with complex function of rv’s. Use transforms (similar z-transform for pmf)
If X is a non-negative continuous rv, then,
If X is a non-negative discrete rv, then,
Bharat B. Madan, Department of Electrical and Computer Engineering, Duke University
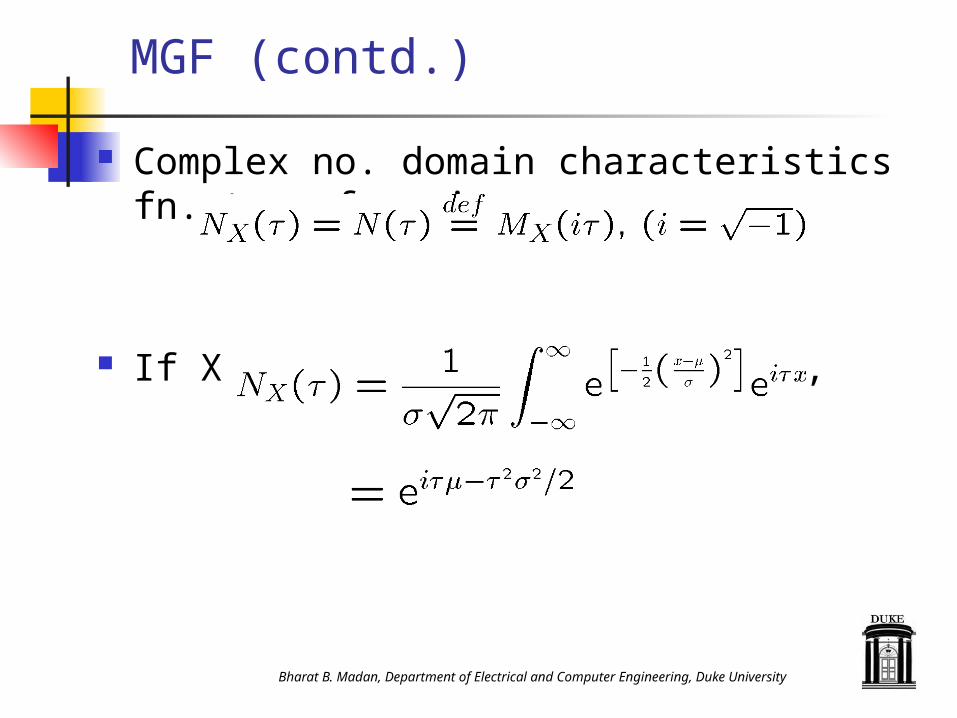
MGF (contd.)
Complex no. domain characteristics fn. transform is
If X is Gaussian N(μ, σ), then,
Bharat B. Madan, Department of Electrical and Computer Engineering, Duke University
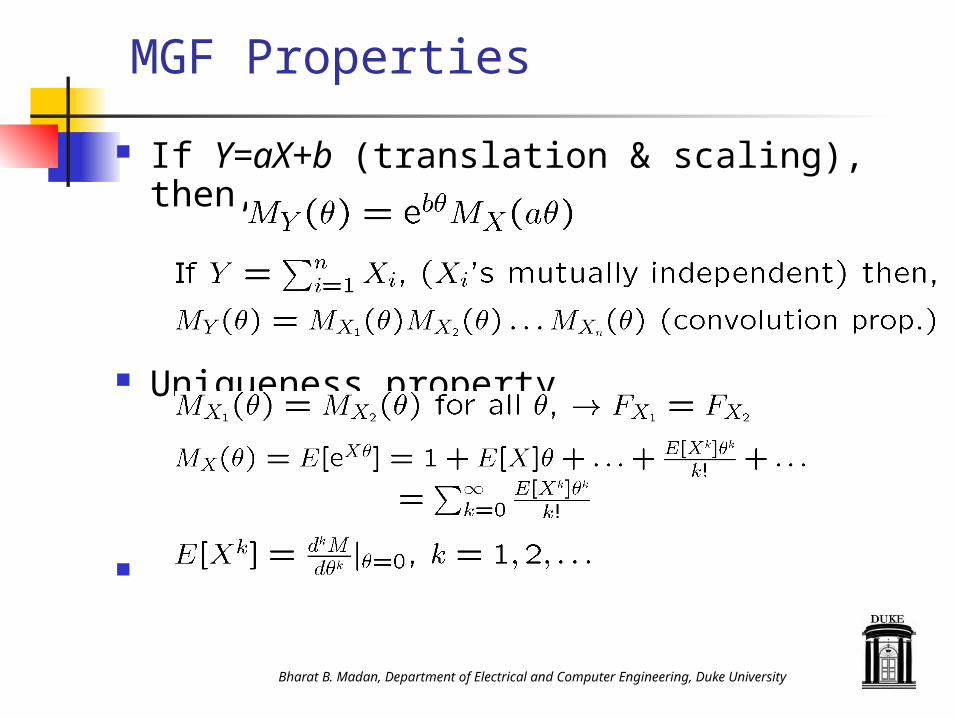
MGF Properties
If Y=aX+b (translation & scaling), then,
Uniqueness property
Bharat B. Madan, Department of Electrical and Computer Engineering, Duke University
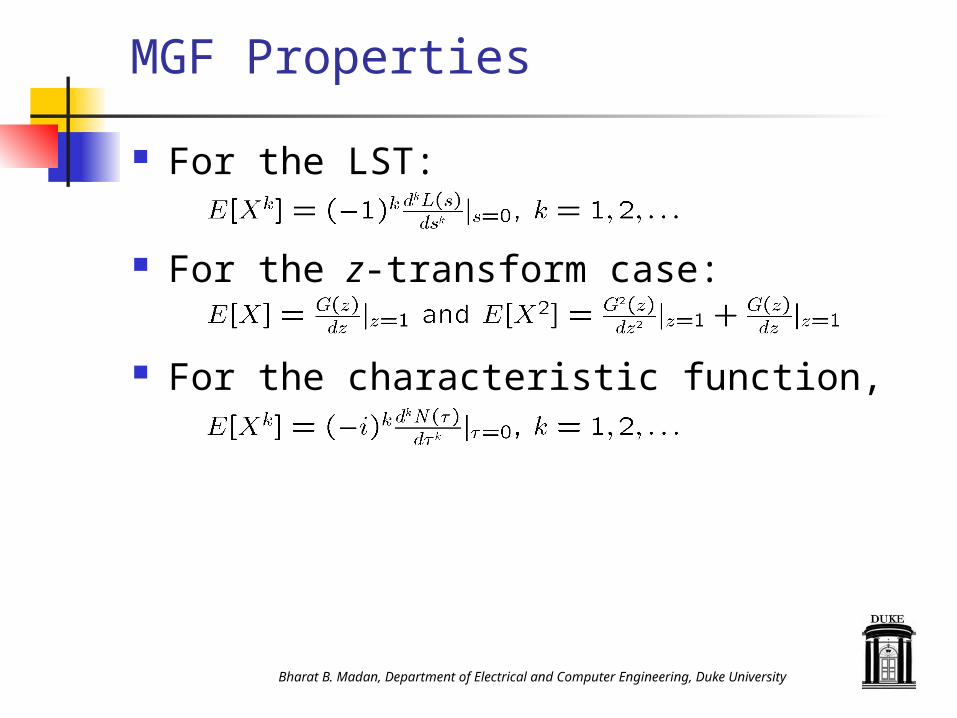
For the LST:
For the z-transform case:
For the characteristic function,
MGF Properties
Bharat B. Madan, Department of Electrical and Computer Engineering, Duke University
MFG of Common Distributions
Read sec. 4.5.1 pp.217-227
Bharat B. Madan, Department of Electrical and Computer Engineering, Duke University
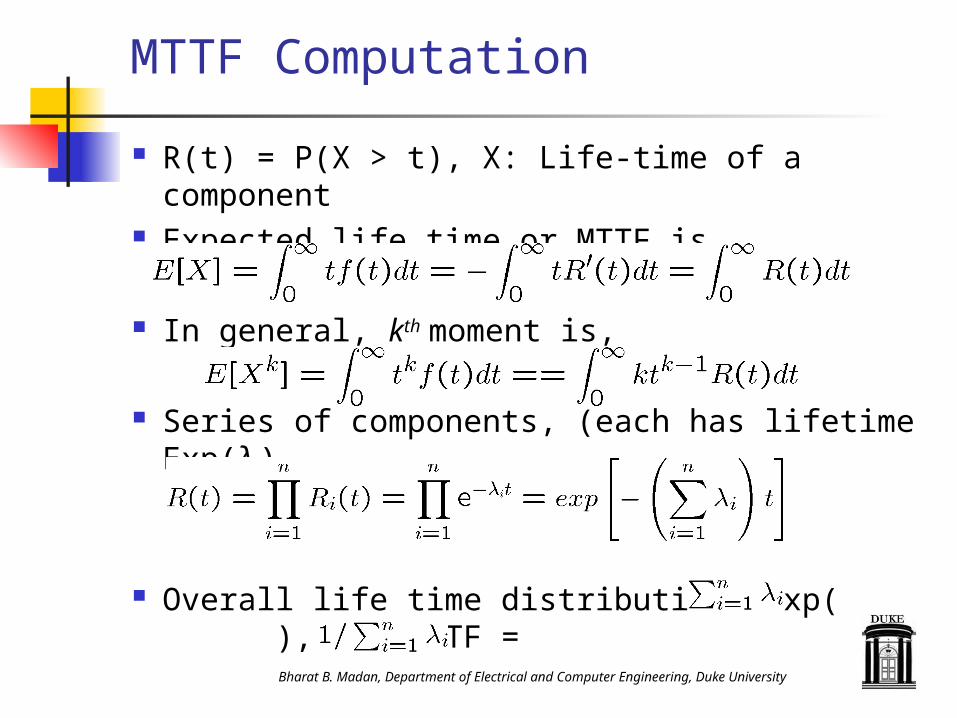
MTTF Computation
R(t) = P(X > t), X: Life-time of a component Expected life time or MTTF is
In general, kth moment is,
Series of components, (each has lifetime Exp(λi)
Overall life time distribution: Exp( ), and MTTF =
Bharat B. Madan, Department of Electrical and Computer Engineering, Duke University
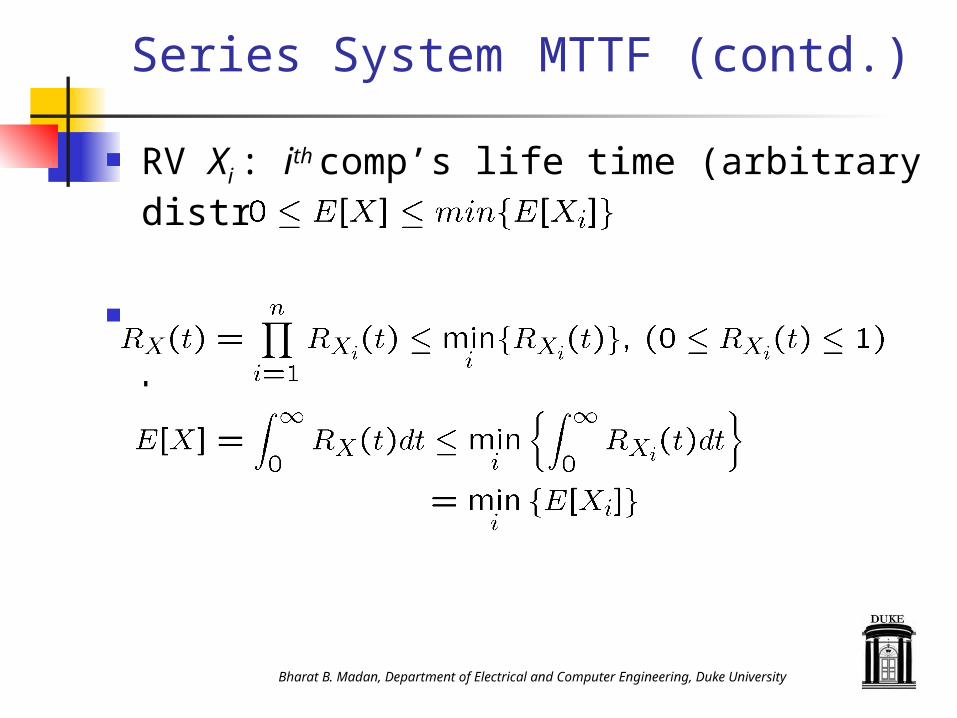
Series System MTTF (contd.)
RV Xi : ith comp’s life time (arbitrary distribution)
Case of least common denominator. To prove above
Bharat B. Madan, Department of Electrical and Computer Engineering, Duke University
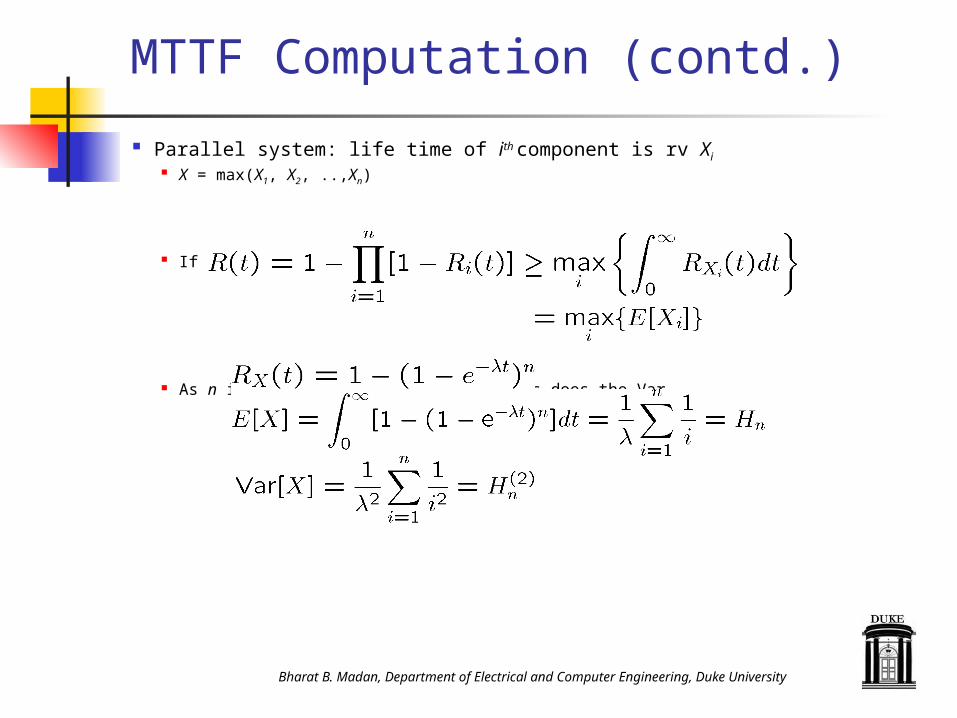
MTTF Computation (contd.)
Parallel system: life time of ith component is rv Xi X = max(X1, X2, ..,Xn)
If all Xi’s are EXP(λ), then,
As n increases, MTTF also increases as does the Var.

Bharat B. Madan, Department of Electrical and Computer Engineering, Duke University
Standby Redundancy
A system with 1 component and (n-1) cold spares. Life time,
If all Xi’s same, Erlang distribution.
Read secs. 4.6.4 and 4.6.5 on TMR and k-out of-n. Sec. 4.7 - Inequalities and Limit theorems





























