Embed Size (px)
Citation preview

EE 290A: Generalized Principal Component Analysis
Lecture 4: Generalized Principal Component Analysis
Sastry & Yang © Spring, 2011
EE 290A, University of California, Berkeley 1
This lecture
GPCA: Problem Definition Segmentation of Multiple Hyperplanes
Reminder: HW 1 due on Feb. 8th.
Sastry & Yang © Spring, 2011
EE 290A, University of California, Berkeley 2

Problem Definition
Define a mixture subspace model
Subspace Segmentation Problem:
Sastry & Yang © Spring, 2011
EE 290A, University of California, Berkeley 3

Projectivization of Affine Subspaces Every affine subspace can be “lifted” to
a linear subspace by adding the homogeneous coordinates
Homogeneous representation
Sastry & Yang © Spring, 2011
EE 290A, University of California, Berkeley 4

Conclusion: Projectivization does not lose information on data model and sample membership
Sastry & Yang © Spring, 2011
EE 290A, University of California, Berkeley 5

Subspace Projection
High-dim data may lie in low-dim subspaces
When d << D, estimation is not efficient
Sastry & Yang © Spring, 2011
EE 290A, University of California, Berkeley 6
Images of a subject under illumination lie on a 20-dim subspace
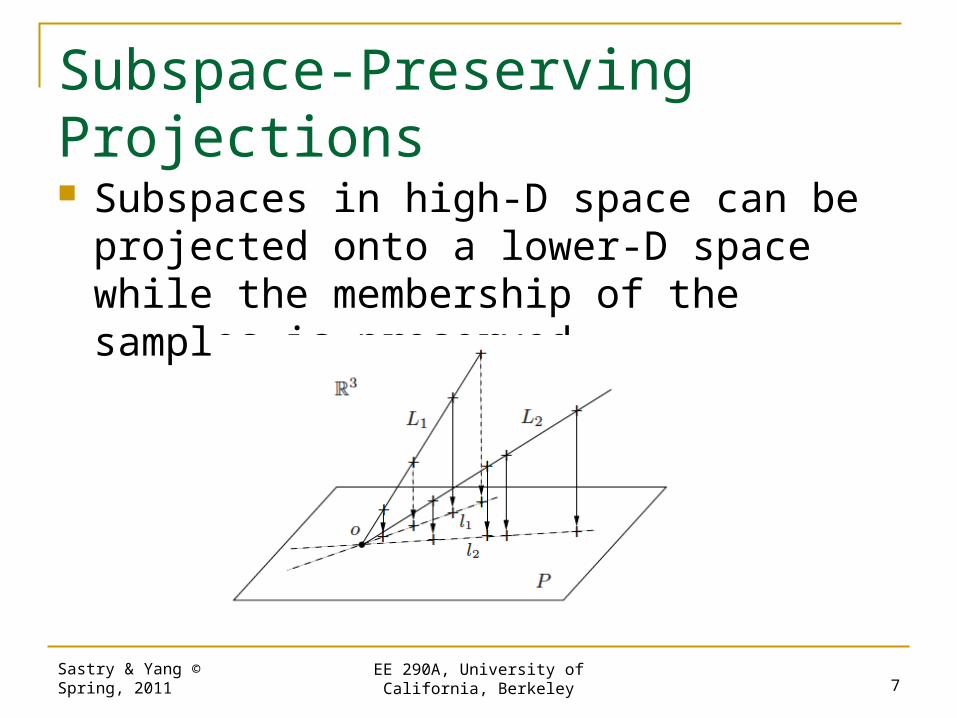
Subspace-Preserving Projections Subspaces in high-D space can be
projected onto a lower-D space while the membership of the samples is preserved
Sastry & Yang © Spring, 2011
EE 290A, University of California, Berkeley 7
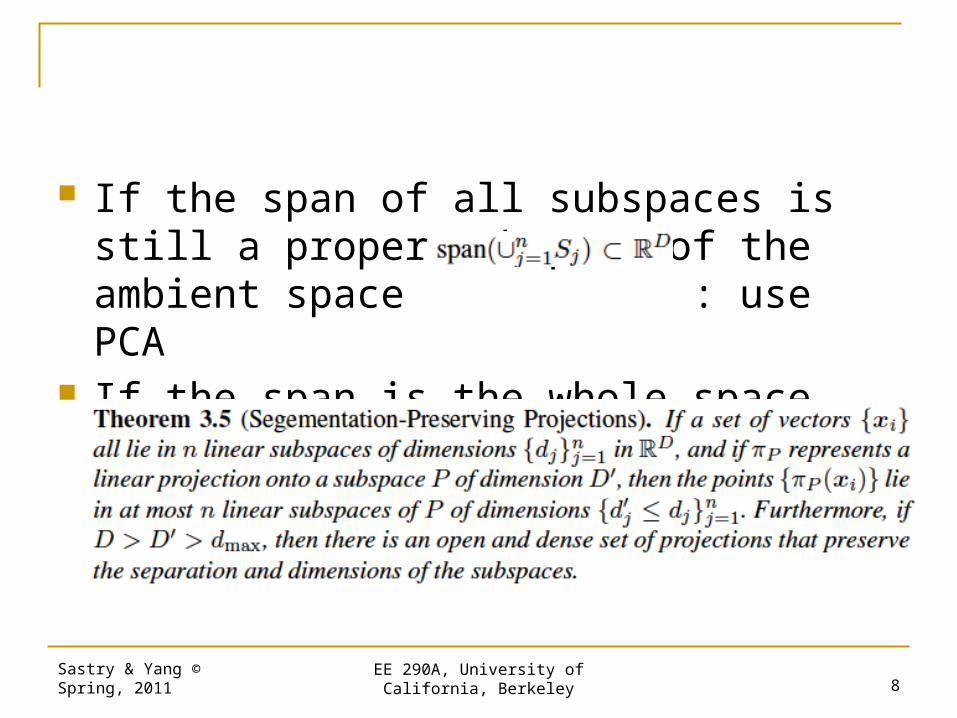
If the span of all subspaces is still a proper subspace of the ambient space
: use PCA If the span is the whole space, yet the
largest dimension is less than (D-1)
Sastry & Yang © Spring, 2011
EE 290A, University of California, Berkeley 8
The approach for mixture-subspace segmentation
Sastry & Yang © Spring, 2011
EE 290A, University of California, Berkeley 9

Choosing a SP-Projection
Sastry & Yang © Spring, 2011
EE 290A, University of California, Berkeley 10

3.2 Introductory Cases
Segmenting points on a line
Sastry & Yang © Spring, 2011
EE 290A, University of California, Berkeley 11

Determine the number of groups
Sastry & Yang © Spring, 2011
EE 290A, University of California, Berkeley 12
Question: When j=K, is the null space of P always 1-D in this case?

Segmenting lines on a plane
Sastry & Yang © Spring, 2011
EE 290A, University of California, Berkeley 13

Sastry & Yang © Spring, 2011
EE 290A, University of California, Berkeley 14

Question 1: How to determine the number of lines?
Question 2: When k=K, is the null space of V always rank-1?
Sastry & Yang © Spring, 2011
EE 290A, University of California, Berkeley 15
Segmenting point clusters on a line or segmenting lines on a plane is a special case of mixture hyperplanes.
Segmenting multiple hyperplanes
Sastry & Yang © Spring, 2011
EE 290A, University of California, Berkeley 16
Sastry & Yang © Spring, 2011
EE 290A, University of California, Berkeley 17
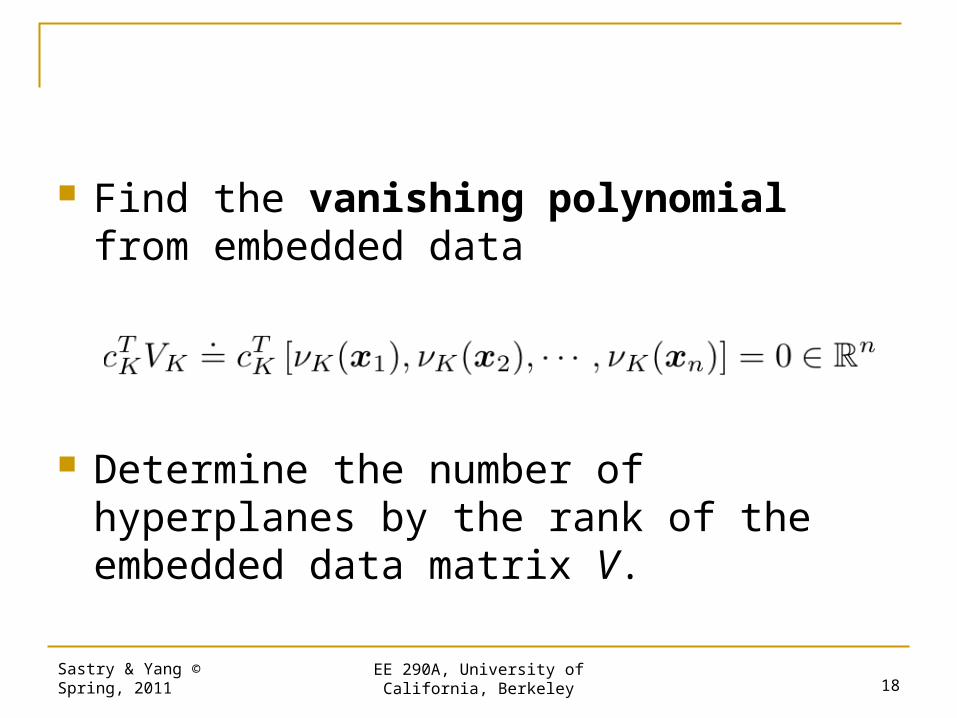
Find the vanishing polynomial from embedded data
Determine the number of hyperplanes by the rank of the embedded data matrix V.
Sastry & Yang © Spring, 2011
EE 290A, University of California, Berkeley 18

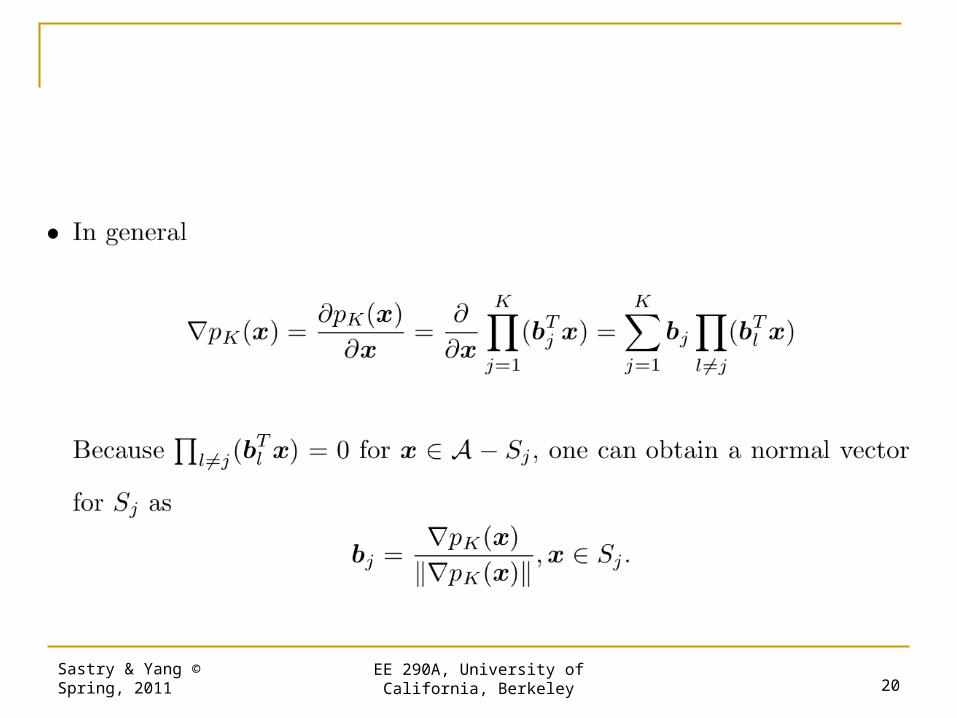
Recover subspaces from vanishing polynomial
Sastry & Yang © Spring, 2011
EE 290A, University of California, Berkeley 19
Sastry & Yang © Spring, 2011
EE 290A, University of California, Berkeley 20

Sastry & Yang © Spring, 2011
EE 290A, University of California, Berkeley 21