-
8/10/2019 Edge-Detection for FPGA
1/7
-
8/10/2019 Edge-Detection for FPGA
2/7
-
8/10/2019 Edge-Detection for FPGA
3/7
Depending on the size of the kernels, the processingrequirements
for the first two convolution stages canchange. Using the
assumption of a kernel size of 7*7for the Gaussian and 5*5 for the
derivative of theGaussian, the two stages require approximately
62operations per pixel. This implementation requires lesscomplexity
than most typical 2-D convolution
processes because of the symmetric and separablecharacteristics
of the Gaussian masks. The non-maximal suppression stage requires
27 operations perpixel. Due to the recursive nature of the
hysteresisthresholding process, this stage requires an additional40
operations per pixel. In total, the Canny algorithmrequires
approximately 130 operations per pixel.Coupled with running at
multiple resolutions, serialimplementation of the algorithm using a
programmableDSP with a clock speed of 600MHz can only process4.6
mega pixels per second. This is not sufficient tosupport real-time
video streams at high resolution.
As high-resolution video standards become moreprevalent, the
processing requirements will increaseeven further. The
high-resolution video standardstypically have 4 times more pixels
per frame. Thecomputation load, therefore is approximately 4
timeshigher. These image processing applications with
highcomputation loads can be implemented with multipleDSPs or a
single, very expensive high-end DSP. In thisscenario, FPGAs offer
an alternative real-time imageprocessing platform. An FPGA
efficiently supportshigh levels of parallel-processing data-flow
structures,which are important for efficient implementation ofimage
processing algorithms.
V. Hardware Implementation on an FPGA
The FPGA implementation of the Canny edge-detectoralgorithm is
partitioned into four different stages asshown in Figure 2.
Figure 2 Block diagram of hardware implementation ofCanny
algorithm
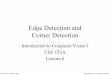
Figure 3 describes the implementation of a genericnon-symmetric
2-D image filter. The incoming pixelsare shifted through the line
buffers that create a delayline. The buffer depth depends on the
number ofpixels in each line of the frame. These delay lines
feedthe filter array simultaneously with pixels from all
therelevant video lines. At each filter node, the pixel is
multiplied with the appropriate filter coefficients. All
themultiplier results are added together at the adder treeto
produce the filter middle point output result.Typically, scaling is
applied at the final output.
Figure 3 Hardware Implementation of non-symmetric2D filter
In general, the efficiency of a hardware implementationis
measured by the number of multiplications. Usingthis metric as the
measure, the complexity of the non-symmetric filter is proportional
to the dimension of the
filter m
2
, where m * mis the size of the convolutionalkernel.
Significant size optimization can be achieved in thecase of
symmetric 2-D video filters. The optimization iseven more
significant in cases where the filter kernel issymmetric and
separable, as is the case with theGaussian filter used in the Canny
algorithm. The 2-Dfilter is separated into two 1-D filters
implemented firstin the horizontal direction, followed by the
verticaldirection as shown in Figure 4. This technique can
beapplied to both the smoothing stage with the Gaussianfilter, and
the identification of the gradient with thederivative of the
Gaussian. Table 1 shows theimplementation complexity of the
different class offilters as a function of number of
multiplicationoperations.
FilterSize
Non-Symmetric
SymmetricSymmetric
andSeparable
m * m m * m (m+1)*(m+3)/8 m + 1
Table 1: 2-D Filter implementation complexity based onnumber of
multiplication operations
-
8/10/2019 Edge-Detection for FPGA
4/7
Figure 4 Hardware implementation of symmetricseparable 2D
filter
Since the convolution for both the Gaussian and itsderivative
can be implemented as separate 1-Dconvolutions, the operations are
implemented inparallel on the FPGA as shown in Figure 2.
The noise reduction function is performed using a 7*7Gaussian
kernel. This kernel slides over the image,line by line, attenuating
the high-frequency noisecomponents of the image. The finding of
zerocrossings is performed using a 5*5 kernel obtained
bycalculating the derivative of Gaussian.
The non-maximal suppression stage identifies pixelsthat are
local maxima in the direction of the gradientusing the magnitude
and orientation of the pixels. Themajor orientation of the
gradient, either horizontal orvertical, is obtained by comparing
the individual
components, dxand dy, which are the result ofconvolving the
smoothed image with the derivative ofthe Gaussian. Since most edges
are at an angle, it ispossible to obtain further granularity in the
orientationof the gradient by comparing the sign bit of the
gradient[3]. This allows the neighboring pixels and theorientation
of the gradient to be determined withinspecific quadrants as shown
in Figure 5.
Figure 5: Determine orientation of gradient in the non-maximal
suppression stage
Once the orientation is determined, the magnitude ofthe gradient
is compared to the interpolated value ofthe magnitude of the
neighboring pixels.The magnitude of the neighboring pixels is
calculatedusing parallel multiplier units. Pixels with
gradientintensities less than their neighboring pixels in the
gradient direction are automatically suppressed orclassified as
a non-edge in order to keep the edgesthin.
The final stage involves thresholding the result fromthe
non-maximal suppression stage to create a binaryimage using two
threshold values (hysteresis): thand tl.
A straightforward approach would include running afirst pass
over the video frame to compare all the pixelswith the two
threshold values. Pixels with gradientvalues above thare marked 2,
classified as an edge.Next, pixels with gradient values less than
thbut abovetlare marked 1, classified as a potential edge. The
rest of the pixels are left as zeros, or non-edge. Figure6 shows
an example of this frame mapping approach.
For each pixel marked as 2, its neighboring pixelswithin a 3x3
neighborhood that are marked 1 areremarked 2. If implemented in
software, this sectionof the algorithm alone can contribute to more
than 20operations per pixel. Additional passes are required tofind
potential edges that were left behind in the initialpasses. Edges
are left behind in cases where there isa line of 1s that leads to 2
in the direction of thepass. Figure 6 shows an example with the
assumptionthat the lines are processed from left to right starting
atthe top. In this scenario, all the 1s in the second row
would be remarked as 2 only in subsequent passes.The number of
passes required depends on thecharacteristics of each video
frame.
Figure 6: Edge strength classification map
Since the number of conversions from 1 to 2 isalways less than
the total number of pixels in theframe, this upper limit guarantees
that operations thatdepend on the 2 locations list FIFO can be
completedduring the real-time processing period of a frame. The
-
8/10/2019 Edge-Detection for FPGA
5/7
FIFOs are implemented using multiple M4K embeddedmemory blocks,
which are of size 4Kbits each.
At the first pass, the edge-detection result map (0, 1,or 2
values) is stored in the embedded RAM blocks,or MRAMs, in the
Stratix or Stratix II device. Theselarge embedded RAM blocks of
589-Kbit size can be
used to temporarily store the edge map where 2 bitsare allocated
for each pixel location.
During each pixel clock cycle, the following operationsare
executed simultaneously in the FPGA to achievereal-time
performance:
Compare gradient value with th
Compare gradient value with tl
Depending on the previous comparisonresults, write 2, 1, or 0
into the next pixellocation
If 2 is being written, then write this addresslocation into the
2 locations list FIFO
If the 2 locations list FIFO is not empty thenread the next
address from the FIFO andconvert each 1 neighbor pixel to 2
Add all the new converted into 2 locations tothe 2 locations
list FIFO
It is possible to extend this design architecture tosupport
multiple resolutions for processing the imageat different levels of
details across scales. A softwareapproach can be used to initiate
and control the dataflow, while the hardware implementation is used
toaccelerate the repetitive tasks.
When combining hardware and software in thesolution, it is
possible to keep the implementation ofthe entire system on a single
FPGA device using theNios II embedded processor. The Nios II
embeddedprocessor features a general-purpose RISC CPUarchitecture.
This soft processor can be reconfiguredto a different set of
peripherals, memories, interfaces,and performance characteristics
using the SOPCBuilder tool featured in the Quartus II design
software.The hardware accelerator block is connected to theNios II
processor as a peripheral using the Avalonswitch fabric which is
generated automatically bySOPC Builder [4].
VI. Implementation Analysis and PreliminaryResults
The architecture described above is implementedusing DSP
Builder, a development tool that interfacesbetween the Altera
Quartus II design software andMATLAB/Simulink tools. The tool
automaticallytranslates the Simulink design representation
created
using the DSP Builder blockset into VHDL targeting theAltera
FPGA.
Figure 7 compares the edge-detection results of theCanny
algorithm and the standard Prewitt filter fornoise-free and noisy
images with different noise levels.It shows the Canny edge detector
is able to keep the
edges one pixel thin as a result of the non-maximalsuppression
process. It also performs better atsuppressing white Gaussian
noise, while maintainingsome level of accuracy at detecting edges
compared tothe Prewitt filter.
Canny Prewitt
a) No Noise
b) SNR 21
c) SNR 11
d) SNR 5Figure 7: Comparing Canny and Prewitt edge
detectorresults at different noise level
Preliminary results show the FPGA design running at264MHz
targeting Stratix II. We used a test image witha resolution of
256x256. The module is fully pipelined
-
8/10/2019 Edge-Detection for FPGA
6/7
2where a resulting pixel is calculated every clock cycle.
With this throughput and clock rate, it is possible toprocess
over 4000 frames of images at the 256x256resolution. The design is
scalable to handle higherresolution images, while maintaining the
clockfrequency used to process standard video-resolutionsignals at
30 frames per second, as well as high-speed
computer vision applications, which require more than100 frames
per second.
It is possible to increase the frequency beyond264MHz by
introducing even more pipeline stages atthe expense of increasing
resource usage. The logiccell usage of 1530 adaptive look-up tables
(ALUTs)consumes approximately 3% of the total utilization ofthe
Stratix II EP2S60 device. Also shown are theresource utilization
numbers targeting the StratixEP1S20 device.
Stage ALUT M4K MRAMDSP
Element2
GaussianSmoothing
320 7 0 16
Derivative ofGaussian
250 5 0 12
Non-MaximalSuppression
800 3 0 15
HysteresisThresholding
160 8 2 0
Total 1530/48352 23/255 2/2 43/288
Percentage 3% 9% 100% 15%
Table 2: FPGA Resource usage based on Cannyalgorithm targeting
Stratix II EP2S60
Stage Logic Cell M4K MRAMDSP
Element2
GaussianSmoothing
500 7 0 16
Derivative ofGaussian
300 5 0 12
Non-MaximalSuppression
1200 3 0 15
HysteresisThresholding
200 8 2 0
Total 2200/18460 23/82 2/2 43/80
Percentage 15% 28% 100% 54%
Table 3: FPGA Resource usage based on Cannyalgorithm targeting
Stratix EP1S20
If a combined hardware and software solution isrequired using
the Nios II processor, an additional
count of 1300 logic cell is required. Depending on theset of
peripherals chosen and performancerequirement for the processor,
the amount of additionallogic required may vary.
2DSP Element refers to a 9x9 multiplier structure within the
DSP
Block3. There are 8 DSP Elements per DSP Block.
3DSP Blocks are dedicated circuitry which offers
multipliers,
accumulators, adders, subtractors, summation units, and
pipelineregisters.
VII. Conclusion
This paper discussed the implementation of the
Cannyedge-detection algorithm on an FPGA. We presentedpreliminary
results, which show the capability ofsupporting adaptive edge
detection for real-time imageprocessing.
Further improvement in the edge-detection researcharea has
resulted in a broad range of evaluationtechniques, which include
using neural networks,probabilistic models [5], and automatic scale
selection[6]. Another class of gradient operators attempt tomatch
image functions to a parametric model of edges.Parametric models
describe edges more precisely thansimple edge magnitude and
direction and are muchmore computationally intensive. While these
advancedalgorithms provide better results, a common challengeamong
these techniques is the increasingcomputational cost as the
complexity of the algorithm
increases. FPGAs are good alternatives, which can beused to
off-load these computationally-intensive andrepetitive functions as
co-processors. Customimplementation in FPGAs, using a combination
ofhardware and software co-design, allows real-timeprocessing,
providing a good trade-off betweenperformance and flexibility.
References
[1] Canny, J., A Computational Approach to EdgeDetection, IEEE
Trans. Pattern Analysis and MachineIntelligence, 8:679-714,
November 1986
[2] Maar, D., Hildreth E., Theory of edge detection,Proceedings
Royal Soc. London, vol. 207, 187-217,1980[3] Advanced Edge
Detection Technique: Techniquesin Computational
Vision:http://www.cpsc.ucalgary.ca/Research/vision/501/edgedetect.pdf[4]
AN333: Developing Peripherals for SOPC
Builder:http://www.altera.com/literature/an/an333.pdf[5] Marimont,
D., Rubner Y., A ProbabilisticFrameword for Edge Detection and
Scale Selection,Proceedings of the IEEE International Conference
onComputer Vision, 207-214, January 1998
[6] Lindeberg T., Edge Detection and Ridge Detectionwith
Automatic Scale Selection, International Journalof Computer Vision,
vol. 30, number 2, 117-154, 1998
http://www.cpsc.ucalgary.ca/Research/vision/501/edgedetect.pdfhttp://www.cpsc.ucalgary.ca/Research/vision/501/edgedetect.pdfhttp://www.altera.com/literature/an/an333.pdfhttp://www.altera.com/literature/an/an333.pdfhttp://www.cpsc.ucalgary.ca/Research/vision/501/edgedetect.pdfhttp://www.cpsc.ucalgary.ca/Research/vision/501/edgedetect.pdf
-
8/10/2019 Edge-Detection for FPGA
7/7
101 Innovation DriveSan Jose, CA 95134(408)
544-7000www.altera.comApplications Hotline:(800) 800-EPLDLiterature
Services:[email protected]
Copyright 2005 Altera Corporation. All rights reserved. Altera,
The Programmable Solutions Company, the stylized Altera logo,
specificdevice designations, and all other words and logos that are
identified as trademarks and/or service marks are, unless noted
otherwise, thetrademarks and service marks of Altera Corporation in
the U.S. and other countries. All other product or service names
are the property oftheir respective holders. Altera products are
protected under numerous U.S. and foreign patents and pending
applications, maskwork rights,and copyrights. Altera warrants
performance of its semiconductor products to current specifications
in accordance with Altera's standardwarranty, but reserves the
right to make changes to any products and services at any time
without notice. Altera assumes no responsibility orliability
arising out of the application or use of any information, product,
or service described herein e xcept as expressly agreed to in
writingby Altera Corporation. Altera customers are advised to
obtain the latest version of device specifications before relying
on any published infor-mation and before placing orders for
products or services.
All copyrights reserved.







![Automatic Brain Tumor Segmentation Using FPGA Platform · transform edge detection algorithm using FPGA approach proposed by Selvathi and Dhara ni [15]. T he above background of current](https://img.pdfslide.us/doc/110x75/5e15d72bdcc4c4249636f163/automatic-brain-tumor-segmentation-using-fpga-platform-transform-edge-detection.jpg)