Embed Size (px)
DESCRIPTION
ECE 551: Digital System Design & Synthesis. Lecture Set 10 10.1: Functional & Timing Verification 10.2: Faults & Testing. ECE 551 - Digital System Design & Synthesis Lecture 10.1 - Functional & Timing Verification. Overview Functional Validation Timing Verification - PowerPoint PPT Presentation
Citation preview

04/21/2003 1
ECE 551: Digital System Design & Synthesis
Lecture Set 1010.1: Functional & Timing
Verification10.2: Faults & Testing

04/21/2003 2
ECE 551 - Digital System Design & Synthesis Lecture 10.1 - Functional & Timing Verification
Overview Functional Validation Timing Verification Elimination of ASIC Timing Violations False Paths Dynamically-Sensitized Paths System Tools for Timing Verification

04/21/2003 3
Functional Validation - 1 Validation of functionality of post-synthesis
netlist compared to pre-synthesis RTL model
Not verification of correctness which should be determined using RTL model
Approaches Formal methods - proof of equivalence Simulation
• Comparison of simulation outputs resulting from application of a rigorously-derived input tests
• Can be simulated simultaneously or separately with post-simulation comparison of results
• Coverage of mismatches depends heavily on the test pattern sequences applied

04/21/2003 4
Functional Validation - 2 Simulation Mismatch
RTL model is delay-free; gate-level model contains propagation delays.
• Mismatch may be due to improperly written RTL model or due to the speed of the synthesized circuit
• Code modification, re-synthesis, and/or change in target specifications may be necessary to resolve.
The RTL description contains races between assignment of one or more variables, improperly used blocking assignments, or asynchronous logic
Don’t care conditions in the RTL model become “care” conditions in the gate-level model

04/21/2003 5
Timing Verification
Dynamic Timing Analysis - Simulation
Static Timing Analysis - Signal path analysis
Timing Specifications Pragmatics: Factors that Affect
Timing

04/21/2003 6
Dynamic & Static Timing Analysis Comparison
Dynamic StaticMethod Simulation Path Analysis
Test Vectors Used
Yes No
Coverage Test Pattern Dependent
Test Pattern Independent
Risk Missed violations False Violations
Min-Max Analysis
No Yes
Coupled with Synthesis
Not Feasible Yes
CPU Run Time Days/Weeks Hours
Memory Use Heavy Low-Moderate

04/21/2003 7
Dynamic Timing Analysis - 1 Coverage of timing violations dependent
on effectiveness of applied test vectors Vectors are not just static, but also
involve one or more changing inputs For the simplest timing model, pairs of
vectors are required In sequential circuits, to achieve a
“vector pair” internally may require a long sequence of vectors on the external ports

04/21/2003 8
Dynamic Timing Analysis - 2 How are effective test patterns produced? Critical path concept - longest delay path through
a circuit - requires consideration of flip-flop propagation delays, flip-flop setup times, delays to inputs from flip-flops and delays from outputs to flip-flops per prior discussion
Elimination of one critical path may simply produce others until timing constraints are meet - thus a set of many paths may need to be considered
How are critical paths identified? Ad Hoc Using timing analysis!

04/21/2003 9
Dynamic Timing Analysis - 3 Critical path determination may be very
difficult since it can be dependent on applied values
Once path determined, need to “sensitize” the output of the path to an input change
Requires fixing of “off path” values according to controlling input patterns on gates
Can be made very complex due to reconvergent fanout paths
More complex when using tPHL and tPLH values due to changes in delay based on inversion control on the path
Example of complex DTA case

04/21/2003 10
Static Timing Analysis - 1 Creates directed, acyclic graph (DAG) of
circuit by abstracting the topology of the net list
Implicitly analyzes all possible paths to determine critical delay path
Example of simple STA case (no slide) But there are issues re accuracy
Problems of multiple paths with the same entry and exit points due to reconvergent fan-out
Complexity introduced by tPHL and tPLH values Issue of false paths - paths through the DAG
down which no signal can propagate from input to output

04/21/2003 11
Static Timing Analysis - 2
Requires introduction of functional information: Dealing with multiple paths with same
entry and exit point Dealing with tPHL and tPLH and inversions on
path Requires user assistance
Dealing with false paths Example of complex STA case (no slide)

04/21/2003 12
Timing Specifications
Already covered in Synthesis Constraints lecture (9.1)

04/21/2003 13
Pragmatics: Factors that Affect Timing Basics covered in lecture on Synthesis
Constraints (9.1) Addition of Concepts of Skew and Jitter in timing
equations: skew = tclk2 - tclk1 - clock period If tclk2 is late, then skew > 0, if early, skew < 0 jitter = the absolute value of the worst case variation
at a given location with respect to the ideal periodic reference clock edge
In the worst case, with a + jitter on the driving FF clock edge and a - jitter on the driven FFs clock edge, the reduction in the clock period is 2 x jitter.

04/21/2003 14
Synchronous
Slack - the extra time available for signals to propagate from the clock to the input of a flip-flop (FF) slack = ideal clock period - path delay - setup
+ skew - 2 x jitter
Constraint - setup slack
specified clock periodMaximum FF, combinationaland wiring delay
slack
setup
skew < 0
jitterjitter

04/21/2003 15
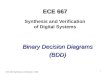
Synchronous
“Hold” Slack - the extra delay present for signals to propagate from the clock to the input of a flip-flop (FF)
slack = path delay - skew - 2 x jitter - hold
Constraint - hold slack
Minimum FF, combinationaland wiring delay
slack
holdskew > 0
jitter

04/21/2003 16
Elimination of ASIC Timing Violations
Action EffectRe-synthesize with changed options
Reduce path delays
Rewrite Verilog code Reduce path delays
Substitute a different algorithm Reduce Path delays
Substitute architectures Reduce path delays
Resize and substitute devices Reduce device delays
Reroute critical paths Reduce net delays
Redesign the clock gen & tree Reduce clock skew & jitter
Lengthen the clock cycle Eliminates violation, but …
Change technologies Reduce path delays

04/21/2003 17
False Paths
See Figure 11-18 in Text See Figure 11-20 in Text

04/21/2003 18
Dynamically Sensitized Paths
Will be missed by static timing analyzer
May or may not be handle by simulation depending on inputs
Example

04/21/2003 19
System Tasks for Timing Verification
Tests for: Setup condition Hold condition Setup and hold conditions Pulse width constraint Signal Skew Constraint Clock period Recovery time
Use of specify block

04/21/2003 20
Setup and Hold Tests
Common statements for examples `timescale 100 ps / 10 ps reg [7:0] data; reg clk;
$setup(data_event, reference_event, limit) Example: $setup(data, posedge clk, 1)
$hold(reference_event, data_event, limit) Example: $hold(posedge clk, data, 0.5)
$setuphold(reference_event, data_event, setup_limit, hold_limit) Example: $setuphold(posedge clk, data, 1, 0.5)

04/21/2003 21
Clock and Recovery Tests
Common statements for examples `timescale 100 ps / 10 ps reg [7:0] data; reg clk, clk1, clk2;
$width(reference_event, limit) Example: $setup(posedge clk, 2)
$skew(reference_event, data_event, limit) Example: $skew(posedge clk1, posedge clk2, 1)
$period(reference_event, limit) Example: $period(posedge clk, 5)
$recovery(reference_event, data_event, limit) Example: $recovery(negedge reset, posedge clk, 2)