Embed Size (px)
Citation preview

ECE 477 Design Review ECE 477 Design Review Team 8 Team 8 Spring 2008 Spring 2008
Mike Cianciarulo, Josh Wildey, Robert Toepfer, Trent Nelson

OutlineOutline• Project overview Project overview • Project-specific success criteriaProject-specific success criteria• Block diagramBlock diagram• Component selection rationaleComponent selection rationale• Packaging designPackaging design• Schematic and theory of operationSchematic and theory of operation• PCB layoutPCB layout• Software design/development statusSoftware design/development status• Project completion timelineProject completion timeline• Questions/discussionQuestions/discussion

Project OverviewProject Overview
• Part of solution for Purdue IEEE Aerial Robotics team that Part of solution for Purdue IEEE Aerial Robotics team that competes in I.A.R.C.competes in I.A.R.C.
• Autonomously navigated roverAutonomously navigated rover– Control vehicle motion (Direction and Speed)Control vehicle motion (Direction and Speed)– Static sensors interfacing and filtering using Static sensors interfacing and filtering using μμCC– Structural detection/avoidanceStructural detection/avoidance– Room mapping algorithms (SLAM)Room mapping algorithms (SLAM)
• Image capturingImage capturing– Compressed image relay to base stationCompressed image relay to base station– Simple Logo identificationSimple Logo identification
• Wireless (bi-directional) data relay in urban settingWireless (bi-directional) data relay in urban setting– 802.11b/g (TCP/IP)802.11b/g (TCP/IP)

Project-Specific Success CriteriaProject-Specific Success Criteria
1.1. An ability to control vehicle direction and An ability to control vehicle direction and speed.speed.
2.2. An ability to detect and avoid obstacles.An ability to detect and avoid obstacles.
3.3. An ability to autonomously map room and An ability to autonomously map room and determine vehicle path.determine vehicle path.
4.4. An ability to capture still images.An ability to capture still images.
5.5. An ability to identify a logo within a An ability to identify a logo within a captured image.captured image.

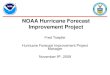
Block DiagramBlock Diagram

Component Selection RationaleComponent Selection Rationale
• Embedded ComputerEmbedded Computer– RequirementsRequirements
• Enough computational power for image Enough computational power for image recognition and room mapping algorithmsrecognition and room mapping algorithms
• Small size and robustSmall size and robust• Interface with Interface with μμC (UART), Camera (USB), C (UART), Camera (USB),
wireless communicationswireless communications• MicrocontrollerMicrocontroller
– 6 ADCs, 3 PWMs, UART, I6 ADCs, 3 PWMs, UART, I22CC

Component Selection RationaleComponent Selection Rationale• Embedded ComputerEmbedded Computer
– Gumstix XL6PGumstix XL6P• Adequate computation power (600 MHz)Adequate computation power (600 MHz)
• Very small form factor 80mm x 20mmVery small form factor 80mm x 20mm
• 128 MB of RAM128 MB of RAM
• RS232 serial to sensors uCRS232 serial to sensors uC
• Host mode USB to cameraHost mode USB to camera
• Low power (5 V, common to other devices)Low power (5 V, common to other devices)
• Ethernet connectivityEthernet connectivity
– Triton 320Triton 320
• Maximum of 800 MHzMaximum of 800 MHz
• DIMM200 SlotDIMM200 Slot
• Hard to find small wireless card to connect via PCMCIAHard to find small wireless card to connect via PCMCIA
• Uncommon power requirements (1.8 V)Uncommon power requirements (1.8 V)
• Poor documentationPoor documentation

Component Selection RationaleComponent Selection Rationale• MicrocontrollerMicrocontroller
– ATmega32ATmega32
• Satisfies all on-chip peripheral requirementsSatisfies all on-chip peripheral requirements
• Development board already on-handDevelopment board already on-hand
• Familiarity with Atmel microcontrollersFamiliarity with Atmel microcontrollers
• Already have DIP and QFP packages of ATmega32Already have DIP and QFP packages of ATmega32
– Motorola HCS12Motorola HCS12
• Satisfies all on-chip peripheral requirementsSatisfies all on-chip peripheral requirements

Packaging DesignPackaging Design
• Very few packaging constraintsVery few packaging constraints– Size and weightSize and weight– IR minimum range IR minimum range – Wide enough for motorsWide enough for motors

Packaging DesignPackaging Design

Schematic/Theory of OperationSchematic/Theory of Operation

Schematic/Theory of OperationSchematic/Theory of Operation

Schematic/Theory of OperationSchematic/Theory of Operation

Schematic/Theory of OperationSchematic/Theory of OperationPart Voltage Rail Max Current Units Quantity Total Current
Gumstix 5 V 0.5 A 1 0.5
ATmega32 5 V 0.015 A 1 0.015
IR(long) 5 V 0.33 A 2 0. 66
IR(short) 5 V 0.05 A 2 0.1
Sonar (I2C) 5 V 0.5 A 4 1
H-Bridge 5 V 0.01 A 2 0.02
Accelerometer 3.3 V 0.0008 A 1 0.0008
Magenetometer 3.3 V 0.001 A 1 0.001
Motor Vbatt 2.05 A 4 8.20
Total Current Draw 5 V Rail 2.301
Total Current Draw 3.3 V Rail
0.0018
Total Current Draw from Vbatt 10.5

PCB LayoutPCB Layout
• MajorMajor– Current DrawCurrent Draw
• Gumstix, camera, wirelessGumstix, camera, wireless• Micro, sensors, motorsMicro, sensors, motors
– Size and weightSize and weight• Needs to fit on helicopterNeeds to fit on helicopter
– DataData• Accurate and preciseAccurate and precise• ReliableReliable

PCB LayoutPCB Layout
• Use headers to interfaceUse headers to interface– Components pre-packagedComponents pre-packaged– Sensors go on topSensors go on top– Motor Controller on bottomMotor Controller on bottom– Gumstix, camera, wireless too bigGumstix, camera, wireless too big

PCB LayoutPCB Layout
• SectionsSections– PowerPower
• 1 - 3.3 Volt regulator1 - 3.3 Volt regulator• 2 - 5.0 Volt regulator2 - 5.0 Volt regulator• BatteryBattery
– AnalogAnalog• ADC lines for IR and Motor ControllerADC lines for IR and Motor Controller
– DigitalDigital

PCB LayoutPCB Layout
• MicrocontrollerMicrocontroller– Bypass CapacitorsBypass Capacitors– LC for ADCLC for ADC
• PowerPower– Regulators have bypass capacitorsRegulators have bypass capacitors– 2 – 5.0 Volt at 1A each2 – 5.0 Volt at 1A each
• GumstixGumstix• Everything elseEverything else

PCB LayoutPCB Layout

PCB LayoutPCB Layout
IRIR
SonarSonar
PowerPower
Level TransLevel Trans

PCB LayoutPCB Layout
ADC LinesADC Lines

PCB LayoutPCB Layout3.3 V and 5.0 V for Gumstix3.3 V and 5.0 V for Gumstix

PCB LayoutPCB Layout
Arrangement Arrangement

`̀Capacitors and LCCapacitors and LC
PCB LayoutPCB Layout

PCB LayoutPCB LayoutCopper PourCopper Pour

PCB LayoutPCB Layout
• 3.5” x 2”3.5” x 2”• Copper PourCopper Pour• ChangesChanges
– Headers smallerHeaders smaller– Route 5 V to sensors Route 5 V to sensors – Less white spaceLess white space

Software Design/Development StatusSoftware Design/Development Status

Software Design/Development StatusSoftware Design/Development Status

Project Completion TimelineProject Completion TimelineMonth Week Task
Interface/test motor controllerReceive Gumstix expansion boardsFinalize PCBReplace bad magnetometerOrder final quantities of sensorsInterface Gumstix with camera and base stationTest cross compiled OpenCV libraryGet basic operation of micro controller with all peripherals at onceEstablish communication between Gumstix and microcontrollerDetect obstacles on microcontrollerChoose SLAM algorithmImplement SLAM algorithmDebug
1 Debug2 Debug
Complete designStart on final report
4 Complete final report
March
April
1
2
3
4
3

Questions / DiscussionQuestions / Discussion