Embed Size (px)
Citation preview

1
Spring 2014 Instructor: Kai Sun
ECE 422/522 Power System Operations &
Planning/Power Systems Analysis II :
7 - Transient Stability

2
Transient Stability
• The ability of the power system to maintain synchronism when subjected to a severe transient disturbance such as a fault on transmission facilities, loss generation, or loss of a large load. – The system response to such disturbances involves large
excursions of generator rotor angles, power flows, bus voltages, and other system variables.
– Stability is influenced by the nonlinear characteristics of the system – If the resulting angular separation between the machines in the
system remains within certain bounds, the system maintains synchronism.
– If loss of synchronism because of transient instability occurs, it will usually be evident within 2-3 seconds of the initial disturbances

3
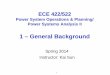
Single-Machine Infinite Bus (SMIB) System
Pe= =Pmaxsinδ
Pmax= E’EB/XT
• Swing Equation: 2
max20
2 sinm e mH d P P P P
dt
Pm= Pe
• The rotor will accelerate if Pm increases, or Pe decreases due to, e.g., a contingency on the transmission path
Pa is called Accelerating Power

4
Power Angle Relationship
Question: What if both circuits are out of service?
Pe= =Pmaxsinδ

5
Pa ωr δ
a >0 =ω0, ↑ ↑
b 0 =ωr, max,↑ ↑
c <0 =ω0 , ↓ =δmax, ↓
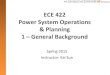
Response to a step change in Pm
Consider a sudden increase in Pm: Pm0→ Pm1. New equilibrium point b satisfying Pe(δ1)=Pm1
• a→ b: Due to the rotor’s inertia, δ cannot jump from δ0 to δ1, so Pa=Pm1-Pe(δ0)>0 and ωr increases from ω0. When b is reached, Pa=0 but ωr >ω0, so δ continues to increase.
• b→ c: δ>δ1 and Pa<0, so ωr decreases until c. At c, ωr=ω0 and δ reaches the peak value δmax.
• ← c: At c, the rotor starts to decelerate (since Pa<0) with ωr<ω0 and δ decreases.
• With all resistances (damping) neglected, δ and ωr oscillate around the new equilibrium point b with a constant amplitude.
2
max20
2 sina m e mH d P P P P P
dt

6
Equal-Area Criterion (EAC)
If δmax exists where dδ/dt=0:
(Note: all losses are neglected)
Moment of inertia in p.u. (Kundur’s Page 131)
2 0 ( )r m eP P dH
20
20
2 ( )2 r m eH P P d
max
0
max
2
0
1 ( )2
rm eJ P P d
1 max
0 1
( ) ( )m e e mP P d P P d
1 2= |area | |area | 0A A
At δmax, ∆ωr=0 and the integral=0

7
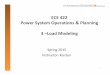
• Equal-Area Criterion (EAC): The stability is maintained only if a decelerating area |A2| ≥ the accelerating area |A1| can be located above Pm (before d, i.e. the Unstable Equilibrium Point or UEP).
• If |A2|<|A1|, δ will continue increasing at UEP (since ωr>ω0), so it will lose stability. • For the case with a step change in Pm, ∆Pm or the new Pm does matter for
transient stability.
UEP SEP

8
1 max
0 11 0 max max max 1( ) sin sin ( )m mP P d P d P
Following a step change Pm0→Pm, solve the transient stability limit of Pm:
• Assume | A1 |=| A2 |:
max 0 max 0 max( ) (cos cos )mP P
max 0 max max 0( )sin cos cos
Transient stability limit for a step change of Pm
• At the UEP, max maxsinmP P
1 max
UEP SEP
max maxsinmP P
• Solve δmax to calculate the transient stability limit for a step change of Pm:
Question: Can we increase Pm beyond that transient limit (with Pm<Pmax)?
0 max 1 0 max max 1 max(cos cos ) (cos cos )m mP P P P

9
• The nonlinear function form:
• Select an initial estimate:
• Calculate iterative solutions by the N-R algorithm:
• Give a solution when a specific accuracy ε is reached, i.e.
max 0 max max 0( )sin cos cos
max 0( ) cosf c
( )max/ 2 k
( )max
( ) ( )( ) max maxmax ( ) ( )
max 0 max
max
( ) ( )where ( ) cos
k
k kk
k k
c f c fdf
d
( 1) ( ) ( )max max max
k k k
( 1) ( )max max
k k
Solve δmax by the Newton-Raphson method

10
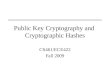
Response to a three-phase fault
Pe= =Pmaxsinδ
• Pe,during fault << Pe, post-fault
• Pe,post-fault <Pe,pre-fault for a permanent fault (cleared by tripping the fault circuit) or Pe, post-fault =Pe,pre-fault for a temporary fault

11
Stable Unstable

12
Critical Clearing Angle (CCA) • Saadat’s Sec.11.6 (Example 11.5) • Consider a simple case
– A three-phase fault at the sending end – Pe, during fault=0 if all resistances are
neglected – Critical Clearing Angle δc
|A1| |A2| Integrating both sides:
max
0m max m( sin )
c
c
P d P P d
0 max max max(cos cos ) ( )m c c m cP P P
max maxmax
cos ( ) cosmc c
PP
0 0max
( ) cosmc
PP
= π-δ0

13
Critical Clearing Time (CCT) • Solve the CCT from the CCA: Since Pe, during fault=0 for this case, during the fault:
2
20
2m
H d Pdt
0 0
02 2t
m md P dt P tdt H H
2004 mP t
H
0
0
4 ( )cc
m
HtP

14
(pre-fault) (post-fault) ≤P3max
(fault-on) ≤ P2max
• For a more general case: Pe (during fault)>0
0
max
3ma0 2 max x m maxsin (s n )ic
c
m ccP P PP dd
m max 3max max 2 max 0
3max 2 max
( ) cos coscos cc
P P PP P
P3max
P2max A1
A2
A3
δs (δu)
• |A1| = Vke(δc), the kinetic energy at δc
• |A1|+|A3| = V(δc)=Vke(δc)+Vpe(δc), total energy at δc
• |A2|+|A3| = Vpe(δu)=Vcr, i.e. the largest potential energy
• If and only if V(δc)≤Vcr (i.e. |A1|≤|A2|), the generator is stable

15
Factors influencing transient stability
• How heavily the generator is loaded. • The generator output during the fault. This depends on the fault
location and type • The fault-clearing time • The post-fault transmission system reactance • The generator reactance. A lower reactance increases peak power
and reduces initial rotor angle. • The generator inertia. The higher the inertia, the slower the rate of
change in angle. This reduces the kinetic energy gained during fault; i.e. the accelerating area A1 is reduced.
• The generator internal voltage magnitude (E’). This depends on the field excitation
• The infinite bus voltage magnitude EB
• How heavily the generator is loaded. • The generator output during the fault. This depends on the fault
location and type • The fault-clearing time • The post-fault transmission system reactance • The generator reactance. A lower reactance increases peak power
and reduces initial rotor angle. • The generator inertia. The higher the inertia, the slower the rate of
change in angle. This reduces the kinetic energy gained during fault; i.e. the accelerating area A1 is reduced.
• The generator internal voltage magnitude (E’). This depends on the field excitation
• The infinite bus voltage magnitude EB

16
EAC for a Two-Machine System • Two interconnected machines respectively with H1 and H2
– The system can be reduced to an equivalent SMIB system
21 0 0
1 1 121 1
( )2 2m e a
d P P Pdt H H
22 0 0
2 2 222 2
( )2 2m e a
d P P Pdt H H
2 2 212 1 2 0 1 12 2 2
1 2
( )2
a ad d d P Pdt dt dt H H
21 2 12 2 1 1 2 2 1 1 2 2 1 1 2
20 1 2 1 2 1 2 1 2
2 =a a m m e eH H d H P H P H P H P H P H PH H dt H H H H H H
12,max
12,0
0m,12 ,12
12
( ) 0eP P dH
212 12
,12 ,1220
2m e
H d P Pdt
Pe12
Pm12
δ12 δ12,max δ12,0

17
Single Machine Equivalent Method (EEAC or SIME) [1]-[3] • Based on generator trajectories obtained from time-domain simulations, split all
generators into two groups (fixed or dynamic) and build a 2-machine equivalent and consequently a single machine equivalent, such that EAC can be applied.
1. Y. Xue, et al, "A Simple Direct Method for Fast Transient Stability Assessment of Large Power Systems". IEEE Trans. on PWRS, PWRS3: 400–412, 1988.
2. Y. Xue, et al, "Extended Equal-Area Criterion Revisited". IEEE Trans. on PWRS, PWRS7: 10101022,1992. 3. M. Pavella, et al, “Transient Stability of Power Systems: a Unified Approach to Assessment and Control”, Kluwer, 2000.

18
Some examples from [3]

19
Methods for Transient Stability Analysis Analyzing a system’s transient stability following a given contingency • Time-domain simulation:
– At present, the most practical available method of transient stability analysis is time-domain simulation in which the nonlinear differential equations are solved by using step-by-step numerical integration techniques.
• Direct methods: – Those methods determine stability without explicitly solving the
system differential equations. The methods are based on Lyapunov’s second method, define a Transient Energy Function (TEF) as a possible Lyapunov function, and compare the TEF to a critical energy Vcr to judge stability
– EAC is a direct method for a SMIB or two-machine system

20
Numerical Integration Methods
• The differential equations to be solved in power system stability analysis are nonlinear ODEs (ordinary differential equations) with known initial values x=x0 and t=t0
where x is the state vector of n dependent variables and t is the independent variable (time). Our objective is to solve x as a function of t
• Explicit Methods – In these methods, the value of x at any value of t is computed from the
knowledge of the values of x from only the previous time steps, e.g. Euler method and R-K methods
• Implicit Methods – These methods use interpolation functions (involving future time steps)
for the expression under the integral, e.g. the Trapezoidal Rule
( , )=x xd f t
dt

21
Euler Method • The Euler method is equivalent to using the first two
terms of the Taylor series expansion for x around the point (x0, t0), referred to as a first-order method (error is on the order of ∆t2)
– Approximate the curve at x=x0 and t=t0 by its tangent
– At step i+1
• The standard Euler method results in inaccuracies because it uses the derivative only at the beginning of the interval as though it applied throughout the interval
0
0 0( , )x
fd xxt
td
=
( , )=dx f x tdt
0
0 01x
x dxx x tt
xd
= + ∆ = + ∆0x
dxd
xt
t∆ ≈ ∆
1+ = + ∆i
i ix
dxx x tdt
t0 t1
x0 ∆t
x1
x(t1)

22
Modified Euler (ME) Method • Modified Euler method consists of two steps:
(a) Predictor step:
The derivative at the end of the ∆t is estimated using x1
p
(b) Corrector step:
• It is a second-order method (error is on the order of ∆t3)
0
1 0p
x
dxxdt
tx = + ∆
1
1
1( , )px
pf xdxt
td
=
0 1
1 0 2
px xc
dx dxdt dt
x x t
+
= + ∆ 1
1 2
pi i
i
x xci
dx dxdt dt
x x t+
+
+
= + ∆
t0 t1
x0 ∆t
x1p
x1c
x (t1)
( , )=dx f x tdt
Slope at the beginning of ∆t
Estimated slope at the end of ∆t
• Step size ∆t must be small enough to obtain a reasonably accurate solution, but at the same time, large enough to avoid the numerical instability with the computer, e.g. increasing round-off errors.

23
Runge-Kutta (R-K) Methods • General formula of the 2nd order R-K method: (error is on the order of ∆t3)
• General formula of the 4th order R-K method: (error is on the order of ∆t5)
1 1 1 2 2i ix x a k a k+ = + +
1( , )i ik f x t t= ∆
2 1( , )i ik f x k t t tα β= + + ∆ ∆
1 0 1 1 2 2x x a k a k= + +
01 0( , )xk f t t= ∆
0 12 0( , )f x k t ttk α β+ + ∆= ∆
The ME method is a special case with a1=a2=1/2, α=β=1
t0 t1
x0 ∆t
x0+αk1
( , )=dx f x tdt
x(t1)
At Step i+1:
1 1 2 3 41 ( 2 2 )6i ix x k k k k+ = + + + +
1 ( , )i ik f x t t= ∆
12 ( , )
2 2i ik tk f x t t∆
= + + ∆
23 ( , )
2 2i ik tk f x t t∆
= + + ∆
4 3( , )i ik f x k t t t= + + ∆ ∆

24
Numerical Stability of Explicit Integration Methods
• Numerical stability is related to the stiffness of the set of differential equations representing the system
• The stiffness is measured by the ratio of the largest to smallest time constant, or more precisely by |λmax/λmin| of the linearized system.
• Stiffness in a transient stability simulation increases with modeling more details (more small time constants are concerned).
• Explicit integration methods have weak stability numerically; with stiff systems, the solution “blows up” unless a small step size is used. Even after the fast modes die out, small time steps continue to be required to maintain numerical stability

25
Implicit Methods • Implicit methods use interpolation functions for the expression under the
integral. “Interpolation” implies the function must pass through the yet unknown points at t1
• The simplest implicit integration method is the Trapezoidal Rule method. It uses linear interpolation.
• The stiffness of the system being analyzed affects accuracy but not numerical stability. With larger time steps, high frequency modes and fast transients are filtered out, and the solutions for the slower modes is still accurate. For example, for the Trapezoidal rule, only dynamic modes faster than f(xn,tn) and f(xn+1,tn+1) are neglected.
t0 t1
f(x0,t0) f(x1,t1)
∆t
( ) ( )
( ) ( )
1 0
1
0 0 1 1
1 1Δ2
Δ2
n+ n n n n+ n+
x = x +
tx = x + f x ,t +
t f x ,t
f x ,
+ f x
t
,t
( ) ( )1 1 n+12n
pn n n n
tx x f x ,t + f x ,t+ +
∆ = +
Compared to ME method:
A
B
x(t1)=x(t0)+|A|+|B|
f

26
Kundur’s Example 13.1

27

28

29
Overall System Equations
• The overall system equations are expressed in the general form comprising a set of first-order differential equations (dynamic devices) and a set of algebraic equations (devices and network) where x state vector of the system V bus voltage vector I current injection vector YN node admittance matrix. It is constant except for changes introduced by network-switching operations; symmetrical except for dissymmetry introduced by phase-shifting transformers (Kundur’s Sec. 6.2.3)
DE AEN
x = f(x,V)I(x,V) = Y V

30
Solution of the Equations • Schemes for the solution of equations DE and AE are
characterized by the following factors – The manner of interface between the DE and AE. Either a
partitioned approach or a simultaneous approach may be used – The integration method, i.e. an implicit method or explicit method,
used to solve the DE. – The method used to solve the AE (power flow analysis), e.g. the
Newton-Raphson method.
• Most commercialized power system simulation programs provide the Modified Euler, 2nd order R-K, 4th order R-K and Trapezoidal Rule methods

31
A Simplified Model for Multi-Machine Systems
• Consider these classic simplifying assumptions: – Each synchronous machine is represented by a voltage source E’ with
constant magnitude |E’| behind X’d (neglecting armature resistances, the effect of saliency and the changes in flux linkages)
– The mechanical rotor angle of each machine coincides with the angle of E’ – The governor’s actions are neglected and the input powers Pmi are assumed to
remain constant during the entire period of simulation – Using the pre-fault bus voltages, all loads are converted to equivalent
admittances to ground. Those admittances are assumed to remain constant (constant impedance load models)
– Damping or asynchronous powers are ignored. – Machines belonging to the same station swing together and are said to be
coherent. A group of coherent machines is represented by one equivalent machine

32
• Solve the initial power flow and determine the initial bus voltage phasors Vi. • Terminal currents Ii of m generators prior to disturbance are calculated by their
terminal voltages Vi and power outputs Si, and then used to calculate E’i
• All loads are converted to equivalent admittances:
• To include voltages behind X’di, add m internal generator buses to the n-bus power system network to form a n+m bus network (ground as the reference for voltages):
X’d1
X’d2
X’dm
E’1
E’2
E’m Ybus nxn reducebus m m×Y

33
• Node voltage equation with ground as reference
Ibus is the vector of the injected bus currents Vbus is the vector of bus voltages measured from the reference node Ybus is the bus admittance matrix :
Yii (diagonal element) is the sum of admittances connected to bus i Yij (off-diagonal element) equals the negative of the admittance between buses i and j Compared to the Ybus for power flow analysis, additional m internal generator nodes are added and Yii (i≤n) is modified to include the load admittance at node i

34
• To simplify the analysis, all nodes other than the generator internal nodes are eliminated as follows
I1
I2
Im
where
where θij is the angle of Yij
2 ω0
needs to be updated whenever the network is changed.

35
Homework #6
• Saadat’s 11.14-11.17, due on 4/24 (Thur)