Embed Size (px)
Citation preview

September 23, 2014 8:48 energy˙harvesting˙v6
International Journal of Bifurcation and Chaosc© World Scientific Publishing Company
Dynamics, Bifurcations and Normal Forms in Arrays of
Magnetostrictive Energy Harvesters with All-to-All Coupling
Antonio Matus-Vargas, Hugo G. Gonzalez-HernandezTecnologico de Monterrey, Campus Puebla,
Puebla, MEXICO
[email protected], [email protected]
Bernard S. Chan and Antonio PalaciosNonlinear Dynamical Systems Group, Department of Mathematics,
San Diego State University, San Diego, CA 92182
Pietro-Luciano BuonoFaculty of Science, University of Ontario Institute of Technology
2000 Simcoe St N, Oshawa, ON L1H 7K4, Canada
Visarath In, Suketu Naik, Alex Phipps, Patrick LonghiniSpace and Naval Warfare Systems Center, Code 2363,
53560 Hull Street, San Diego, CA 92152-5001, USA
[email protected], [email protected], [email protected], [email protected]
Received (to be inserted by publisher)
Modeling and bifurcation analysis of an energy harvesting system composed of coupled res-onators using the Galfenol-based magnetostrictive material are presented. The analysis in thiswork should be broad enough to be applicable to a large class of vibratory-based energy har-vesting systems since various types of vibratory harvesters share the same normal forms, e.g.,magnetostrictive and piezoelectric materials. A combined model of the mechanical and electricaldomains of a single energy harvester is discussed first. Building on this model, the governingequations of the coupled system are derived, leading to a system of differential equations with anall-to-all coupling between the resonators. A bifurcation analysis of the system equations revealsdifferent patterns of collective oscillations. Among the many different patterns, a synchronousstate exist and it is stable over a broad region of parameter space. This pattern has the potentialto yield significant increases in power output and it will be used as a starting point to guidefuture experimental work. A hamiltonian approach is employed to study analytically the natureof the bifurcations and to calculate an expression for the onset of synchronization valid for anynumber of harvesters.
Keywords : Synchronization; networks; energy harvesting; bifurcations.
1

September 23, 2014 8:48 energy˙harvesting˙v6
2 A. Matus-Vargaset al.
1. Introduction
The advent of smart materials, whose properties can be significantly altered in a controlled fashion by ex-ternal conditions such as stress, temperature, moisture, electric or magnetic fields, has been a catalyst forthe development of high-performance microelectronic devices that can operate at very low power. Together,smart materials and power-efficient microelectronics have lead the quest for robust energy harvesting (EH)systems that can endure long-term exposure to hostile environments while powering such small electronicdevices. Examples span a wide range of technologies: wireless sensor networks, micro wind turbine, thermo-electric generators, health monitoring systems, human-generated power devices for biomedical applications,and, of course, consumer products such as automatic wrist watches, television remote controls, and sensorfeeds to the computer cloud [Beeby et al., 2006; Erturk , 2009; Gilbert & Balouchi, 2008].
In general, the goal of all energy harvesting devices is to convert ambient or environmental energyinto electrical energy [Roundy et al., 2004]. A suitable classification scheme for energy harvester systems,proposed and adopted by various authors [Gilbert & Balouchi, 2008], is based on the energy source:electromagnetic radiation (e.g., ambient light), thermal (e.g., a domestic hot water radiator), human energy(e.g., body heat, exhalation, body motion), and mechanical, which can be subdivided into steady-statemechanical sources (e.g., fluid flow in wind turbines and hydroelectric plants), intermittent mechanicalsources (e.g., moving vehicles), and vibration (e.g., vibrations from engines or the motion of a heel ofa shoe). This work is focused on the study of vibrational energy harvesting systems. Typically, thesetypes of systems rely on a transducer to convert the device oscillations into electrical energy. At meso-scale (1cm-10 cm), the three most common transduction mechanisms are electromagnetic, electrostatic,and piezoelectric [Sodano et al., 2003]. More recently, magnetostrictive materials (MsM) have also gainedconsiderable use as a fourth mechanism [Lei & Fuh-Gwo, 2006; Wang & Yuan, 2008].
The electromagnetic technique includes suspended magnets in a coil or a suspended coil in a magnetarray which oscillates when it is excited with a vibrational motion. The oscillations are then convertedinto the electrical energy. The performance of these devices relies heavily on the proximity of the magnetswith the coil, strength of the magnets, and the coil windings (number of turns). In another method,an electrostatic conversion employs a parallel plate originally polarized by a power source. Variations inthe distance between the plates or in their overlapping area lead to changes in voltage which can then beextracted to power up an electrical load. Piezoelectric materials can directly generate electrical energy whenthey are mechanically strained. For this reason, they are among the most widely used mechanisms of energyconversion. In particular, Lead Zirconate Titanate or (PZT) has a high electro-mechanical coefficient,which is a measure of efficiency of the conversion of mechanical strain into electricity, but the lead possesan environmental risk. Another major issue with standard energy harvesting techniques is that mosttransducers behave as second order linear systems and are designed to have strong resonant behavior, i.e.,high quality factor Q, to create more displacement. However, the amount of electrical energy producedis drastically degraded when there is a mismatch between the resonant frequency of the device and theexcitation frequency. The mismatch can be addressed by devices with nonlinear resonance with extendedbandwidth [Barton et al., 2010; Cottone et al., 2009; Ferrari et al., 2009; Hu et al., 2006; Moehlis et al.,2009; Sebald et al., 2011]. The devices with a nonlinear response characteristics can possibly perform betterthan a linear device when targeting a broad spectrum vibrational energy [Barton et al., 2010; Lien & Shu,2012; Sodano et al., 2003].
To circumvent these challenges, a wide range of techniques that combine linear and nonlinear com-ponents with novel materials and “coupling” configurations have been proposed with the ultimate goal ofharvesting more energy from a broad range of frequencies. Some include: axial preloads [Hu et al., 2007],nonlinear stochastic resonance [Cottone et al., 2009; McInnes et al., 2008], damping matching betweenelectrical and mechanical components [Challa et al., 2009], bidirectional hysteresis [Stanton et al., 2009],exploiting bistability [Cottone et al., 2009; Erturk et al., 2009; Mann & Owens , 2010; Stanton et al.,2010] and magnetic levitation [Mann & Sims, 2009; Liu & Yuan, 2011]. Most of these works have focusedon a single energy harvester and the word “coupling” is typically used to describe the integration of twocomponents, e.g., a PZT material with an electromagnetic component. Recently, a two-beam buckled con-figuration [Blarigan et al., 2012] with a double-well potential function was shown to harvest energy over

September 23, 2014 8:48 energy˙harvesting˙v6
Arrays of Coupled Magnetostrictive Energy Harvesters 3
a broad range of frequencies. And very recently, a 2012 fast-track communication [Lien & Shu, 2012] hasprovided a preliminary glimpse into the power output of parallel/series arrays of “linear” models of PZTs.
In this work we also consider nonlinear systems but with an alternative configuration. We proposeto couple, mechanically and, possibly, inductively, multiple harvesters. We restrict our attention to 1Darrays, for brevity, and the goal is to exploit the symmetry of the system and its collective behavior ofmultiple units to optimize the energy conversion. The results obtained will be used to guide the design andexperimental work that is in progress. The motivation for this approach stems from previous theoreticaland experimental works [Vu et al., 2010, 2011; Davies et al., 2013; Bulsara et al., 2003; Turtle et al., 2013]on coupled nonlinear oscillators, with nonlinear input-output characteristics similar to vibration energyharvesting systems. More specifically, those works have shown that coupling induced oscillations can lead,under certain conditions that depend on the topology of connections, i.e., which nodes are connectedto each other, and the symmetry of the system, to highly sensitive and robust sensor systems that canoperate at low power. Examples include: magnetic- and electric-field sensors, gyroscopic sensors, and multi-frequency conversion systems. For this work, magnetostrictive materials would be the preferred choicebecause they exhibit high electromechanical coefficients, are highly flexible, and are well suited to workwith high frequency vibrations. Additionally, even though our work and focus are on the magnetostrictive-based material, the results developed here will be applicable to the piezoelectric-based energy harvestersas well since the normal form equations for both systems are the same, see Section 2 for details. In thissense the analysis will be device-independent.
The manuscript is organized as follows. In Section 2 a system-based model, which captures both themechanical and electrical behavior of the individual transducers where the vibrational energy is convertedinto electrical energy, is briefly described. In Section 3 the governing equations, in dimensionless form,for the 1D array are introduced. The mechanical coupling is assumed to be all-to-all because the basefor mounting the array is rigid. Therefore, the array exhibits SN -symmetry, where SN is the group ofpermutations of N objects. The inductive coupling is also assumed to be all-to-all as it may arise in micro-scale (MEMS) implementations. A computational bifurcation analysis of the particular case of N = 3 showscomplex transitions between different types of collective behaviors, including complete synchronization. InSection 4 a similar circuit with a load capacitor is studied. The observed transitions are similar but withsignificantly less complexity than those of the previous case. To analyze the behavior of larger arrays, theequations of motions, without forcing and damping, are first written in Hamiltonian form, see Section 5.Then the isotopic decomposition of the phase space under the action of the group of symmetries, i.e.,SN , is used to study the linear stability of equilibrium states. In Section 6 experimental works aimed atestimating parameter values and at validating the modeling approach are presented. The presentation ispreliminary in nature, complete details will be disseminated in a follow-up manuscript.
2. Single Magnetostrictive Energy Harvesting System Model
In order to effectively design an efficient vibration energy harvesting system, it is necessary to have anaccurate model which captures the electromechanical behavior of various system components, e.g., trans-ducer materials, power electronics, load matching, and the understanding of the interactions of the coupledsystem through the different coupling mechanisms. To start off, a single beam model is first developedby using Galfenol material with a typical composition of Fe83Ga17. It is a magnetostrictive material thatexhibits large magnetostrictive effect (200-300 ppm strain) at low applied magnetic field [2] which has apotential for high power generation. Additionally, it exhibits other desirable characteristics such as lowoutput impedance (ideal for impedance matching in the electrical domain), small hysteresis and low coer-civity. Furthermore, unlike the ceramic materials, such as PZT, which tends to develop fatigue issues aftergoing through many oscillating cycles, Galfenol does not exhibit this problem.
The linear transducer model is based on the principles of lumped element modeling, whereby thepotential and kinetic energy distributed throughout the transducer beam is lumped together and assumedto occur at the tip of the beam. In this manner, the transducer can be modeled as a second order mechanicalsystem coupled to the electrical domain via the magnetostrictive effect and the electrical coil. Further detailof the model may be found in [Sodano et al., 2003; Lei & Fuh-Gwo, 2006; Wang & Yuan, 2008].

September 23, 2014 8:48 energy˙harvesting˙v6
4 A. Matus-Vargaset al.
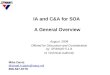
Fig. 1. Lumped model of an energy harvesting system.
The mechanical domain of the transducer is represented by a second order RLC circuit system, as isshown in Fig. 1, where Mm represents the lumped mass, Cms is the lumped spring constant, and Rm isthe lumped damping parameter. The effort variable is force, Fm and the flow variable is velocity, Vm. Theelectrical domain of the transducer is comprised of the coil inductance, LCoil, and its resistance, RCoil, alsoshown in Fig.1. The transduction between the two domains is modeled as a gyrator. Unlike the transformerscommonly used in electrodynamic modeling, a gyrator assumes a linear relationship between the effort andflow variables of the two domains. For example, a linear relationship is assumed between the force in themechanical domain and the current in the electrical domain. The gyrator transduction factor, G, lumpsall of the energy transduction mechanisms (mechanical to magnetic to electrical) into a single term. Thederivation of this term from first principles is not trivial and has been carried out empirically for this work.
Ideally, the soft potential behavior of the magnetic material would show up in the frequency responseas hysteresis during up-sweep and down-sweep in the experiment. However further increasing the baseexcitation to a higher amplitude (so that nonlinearity is more prominent than damping) tends to breakthe beams. Both the measured and simulated responses show a distinct shift of the resonant frequency tothe left and eventually a hysteresis shows up while increasing the excitation amplitude. Following theseobservations, the values of the nonlinear spring constant were calculated to reflect the experimental responsequalitatively. Finally, linear and nonlinear responses were combined to arrive at the following model for asingle MsM energy harvesting system:
md2z
dt2+ b
dz
dt+ k1z + k3z
3 = Fe(t) − G i
Lcdi
dt+ (RL +Rc)i = G
dz
dt,
(1)
where z(t) is the state variable that describes the displacement at any given time t of a cantilever beamof mass m, b is the damping coefficient, k1 and k3 are the linear and nonlinear coefficients of the elasticrestoring force of the beam. The externally applied force Fe(t) is assumed to be sinusoidal and of the formFe(t) = Ad cos(ωdt), where Ad is the amplitude and wd is the frequency of the excitation. In the readoutcoil, G is the transduction factor that measures the gain in the conversion of vibrations into electricalcurrent, Lc and Rc are the coil inductance and resistance, respectively, and RL is the load. In the absenceof any energy conversion, i.e., G = 0, the equations of motion (1) become uncoupled from one anotherwhich essentially reduces the dynamics of the beam to that of a Duffing oscillator subjected to a periodicforcing. This is a system that has been extensively studied [Nayfeh, 2004; Rand, 2012].
For comparison purposes, vibrating piezoelectric energy harvesters typically consist of a mass m,which is subjected to an applied force F (t) while it sits on top of a spring of stiffness K, a damper ofcoefficient η and a piezoelectric material of coefficient Θ and capacitance Cp. Under this configuration, thevibrating energy harvester will generate an AC voltage Vp across the piezoelectric element upon a nonzerodisplacement u(t) of the mass m. This behavior is also frequently modeled [Shu & Lien, 2006] through

September 23, 2014 8:48 energy˙harvesting˙v6
Arrays of Coupled Magnetostrictive Energy Harvesters 5
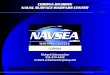
Fig. 2. Cantilever Beam.
lumped mass-spring-damper circuits of the form
mu(t) + ηu(t) +Ku(t) = Fe(t) − ΘVp(t)
(Cp + Ce)Vp +1
RVp = Θu(t),
(2)
where Ce is a filtering capacitor which is used to convert the AC Voltage to a DC one. This modelassumesthe energy harvester to work at resonance. However, as it was described in Section 1, nonlinear mechanicalresonators have become common practice to increase power output. In addition, MEMS realizations behavenonlinearly even under small forcing amplitudes due to their size. In both cases, the nonlinearities commonlyyield an additional term of the form u3(t). Thus, up to a change of variables, Eq. (1) and Eq. (2) are one andthe same. Consequently, the normal forms for an energy harvesting system with magnetostricitve materialsand with piezoelectric structures are identical.
To help extract the relevant parameters used in the model, a single beam system is constructed.Figure 2 illustrates the single beam design for a meso-scale transducer used in this work. It comprises ofan active Galfenol sample mounted onto a thin aluminum shim. This entire structure, both the shim andthe Galfenol, is then wrapped with insulated copper wire to form the coil. As the base of the transduceris vibrated in the z-direction, inertial forces cause a relative displacement between the base and tip of thebeam. The result of this displacement is a strain induced in the Galfenol in the x-direction, which generatesa magnetic field (also in the x-direction) due to the magnetostrictive effect. Oscillations of the beam lead toa time-varying magnetic field within the coil, which produces a time-varying electrical current as a result ofFaradaic induction. The electric current can be converted to electric voltage using load. Here, displacementwas measured with laser sensors and the output of the coil (voltage) was measured using Dynamic SignalAnalyzer (DSA) from which the frequency response curves were obtained. Resonance frequency (wd) wasdetermined from the frequency response curve. The sample was weighed to determine the value of mass(m). Next, the values of linear spring constant (k1) and damping (b) were determined. All of the abovevalues and the values of transduction factor (G) were measured and verified in additional experiments.The value of the nonlinear spring constant (k3) was approximated from the frequency response curve. Theparameters for the coil were measured on the LCR meter.
Consequently, from this model and the single beam setup, most accurate and physically relevantparameters have been used for the subsequent analyses. A complete detail of the experimental system willbe discussed in a future report when focus is given to the construct of the actual device based on thisforthcoming analysis. Table 1 shows a compilation of the parameters used throughout the remainder ofthis paper.
3. Coupled Energy Harvester System
As mentioned previously, the aim is to eventually fabricate an energy harvesters in the coupled configurationto optimize the energy production from a bath of vibration energy. Toward this end, a mesoscale coupledenergy harvesters in an array may resemble a system as illustrated in Fig. 3, where individual beam areconstructed according the aforementioned design in Section 2. Two possible coupling topologies are shownfor illustration purposes: a ring with all-to-all coupling and a chain with nearest-neighbors coupling. In thiswork, the analysis is focused, however, on the ring configuration with all-to-all coupling. At the microscale,a similar system would consist of coupled Micro-Electro-Mechanical-Systems (MEMS) resonators. Thus

September 23, 2014 8:48 energy˙harvesting˙v6
6 A. Matus-Vargaset al.
Table 1. System parameters for avibratory energy harvesting system.
Parameter Value Unit
m 0.010326 Kg
b 0.2753 N s/meter
k1 568.69 N/meter
k3 -2.8445 N/meter3
Ad 1.0E-03 N
wd 30 Hz
G 0.1448 V s/meter
Lc 47.16E-03 H
Rc 90.87 Ohms
RL 90.87 Ohms
the aim now is to study the behavior of such system before it is fabricated and to use the results as adesign guide for future experimental work of a prototype device.
Fig. 3. Schematic designs of a coupled energy harvesting system with two possible coupling topologies. (Top-left) A ring con-figuration with all-to-all coupling and (bottom-left) a chain configuration with nearest-neighbors coupling. Other configurationsmight be realizable as well.
3.1. Model Equations
We now consider an array of N energy harvesting units arranged in a ring configuration which is repre-sentative of the system shown in Fig. 3. The beams are coupled mechanically through the displacementvariable zj of the jth beam and inductively through the derivatives of the circulating currents ij . Thegoverning equations for beams j = 1, . . . , N can then be written in the following general form
md2zjdt2
+ bdzjdt
+ k1zj + k3z3j +
∑
k→j
cjkhz(zj , zk) = Fe(t) − G ij
Lcdijdt
+ (RL +Rc)ij +∑
k→j
Mjkhi
(dijdt
,dikdt
)= G
dzjdt
,(3)

September 23, 2014 8:48 energy˙harvesting˙v6
Arrays of Coupled Magnetostrictive Energy Harvesters 7
where hz(zj , zk) is the mechanical coupling function between beam j and k, the summation is takenover those beams k that are coupled to beam j and cjk is a matrix of coupling strengths. Parametervalues for each beam are the same as those shown in Table 1. Similarly, hi (dij/dt, dik/dt) is the inductivecoupling function between beams j and k, with coupling strength Mjk, except that now coupling occursthrough the derivatives of the circulating currents. Note from Fig. 3 that all individual composite beams arecoupled to one another through the common mounting base which suggests a coupling function of the formhz(zj , zk) = zk. If we further assume the beams to be identical, then the cjk = λ can designate the commoncoupling strength. An analysis of non-identical elements is deferred for future work. In a micro-scale MEMSrealization we can expect all units to be inductively coupled to one another, due to the proximity of themagnetic fields, so that the inductive coupling function is of the form hi (dij/dt, dik/dt) = dik/dt. Thenwe can rewrite Eq. (3) using matrix notation as
d2zjdt2
+ 2δdzjdt
+ ω20zj +
k3m
z3j +λ
m
N∑
k=1
zk =Ad
mcos(wdt) −
G
mij
(MN×N × diN×1
dt
)
j
+ (RL +Rc)ij = Gdzjdt
,
(4)
where
ω20 =
k1m
, 2δ =b
m=
ω0
Q, Q ≡ Quality factor,
and
MN×N =
Lc M1,2 · · · M1,N
M1,2 Lc · · · M2,N...
.... . .
...M1,N M2,N · · · Lc
, iN×1 =
i1(t)i2(t)...
iN (t)
.
Since we are assuming all beams to be identical with identical Galfenol samples and pick up coil thenit is reasonable to consider identical mutual couplings, so that Mi,j = M .
3.2. Dimensionless Model
We now seek to derive a dimensionless version of the model Eq. (4) so that we can interpret and distinguishthe oscillations with small amplitudes with norm close to zero from those with large amplitudes withnorm closer to one. Following a similar approach used in the nonlinear analysis of piezoelectric energyharvesters [Sebald et al., 2011], we introduce the following dimensionless variables:
τ = ω0t, zj(t) =
√k1|k3|
xj(τ), ij(t) =k1G
√k1|k3|
Ij(τ).
Due to the change in time variable, time derivatives are modified according to
d
dtzj(t) = ω0
√k1|k3|
d
dτxj(τ),
d2
dt2zj(t) = ω2
0
√k1|k3|
d2
dτ2xj(τ)
d
dtij(t) = ω0
k1G
√k1|k3|
d
dtIj(τ).
Eq. (4) can then be rewritten in dimensionless form as
x′′j (τ) +1Qx′j(τ) + xj(τ) + γx3j (τ) + λr
N∑
k=1
xk = Fr cos(ωrτ) − Ij(HN×N × I′
N×1
)j+ αIj(τ) = κ2x′j(τ),
(5)

September 23, 2014 8:48 energy˙harvesting˙v6
8 A. Matus-Vargaset al.
where seven new independent parameters have been defined as
λr =λ
k1, κ2 =
G2
Lck1, γ = sgn(k3),
Fr =
√|k3|
k3/21
Ad, ωr =ωd
ω0, α =
RL +Rc
Lcω0,
µ =M
Lc,
and
IT =N∑
n=1
In(τ), HN×N =
1 µ · · · µµ 1 · · · µ...
. . ....
µ µ · · · 1
, IN×1 =
I1(τ)I2(τ)...
IN (τ)
.
From this set of transformations and preparation, we now turn to study the underlying bifurcationsof the coupled energy harvesting system using the computational method to gain access into the details ofvarious behaviors that exist in the dynamics. This kind of access would be difficult and nearly impossibleto obtain through analytical methods.
3.3. Computational Bifurcation Analysis
Micro-scale Analysis
We first consider a micro-scale version of the array. The expected, small, separation among the beamssuggest that the beams will be coupled inductively, so that M 6= 0. A bifurcation diagram of the emergentbehavior in Eq. (5), as a function of the coupling strength λr, is shown in Fig. 4. All other parameters areheld fixed. The diagram was generated with the aid of the continuation software package AUTO [Doedel &Wang, 1994]. As a convention, solid/dashed lines and filled-in/empty circles correspond to stable/unstableequilibrium points and stable/unstable periodic solutions, respectively in the bifurcations diagrams.
In the absence of forcing, i.e., Fr = 0, the coupled system cannot oscillate, see Fig. 4(left). For couplingstrengths λ < λc = −0.333, only the trivial solution exists, although it is unstable. At λ = λc, two (unstable)branches of equilibrium points emerge via a subcritical pitchfork bifurcation. For λ > λc the trivial solutiongains stability as it becomes globally asymptotically stable, i.e., all initial conditions eventually approachzero. For small nonzero forcing term, about Fr = 0.1 in Fig. 4(right), three branches of collective behavioremerge. Branch 1 represents a pattern of complete synchronization in which all beams oscillate with thesame wave form and same amplitude and phase. Along this branch the mean value of the oscillations isexactly zero. We denote this pattern IP. In Branch 2 the vibrations of the beams are also synchronized butwith a nonzero mean. Observe that Branch 2 emerges, locally, off of Branch 1 via a subcritical pitchforkbifurcation located at the same critical coupling strength λc as in the zero-forcing case. In fact, we can usethe Implicit Function Theorem to show that for small 2π/ωr-periodic forcing, if a non-resonance conditionon the eigenvalues of the Jacobian at a certain equilibrium (x0, I0) is satisfied, there exists a 2π/ωr-periodic solution P0(t) of the forced system (5) passing near (x0, I0) in the extended phase space. SeeChicone [Chicone, 2000] for a proof. In simple words, when the forcing term is turned on the equilibriumsolutions of Fig. 4(left) become foliated by a family of periodic oscillations with nonzero mean correspondingto the equilibrium points. Along Branch 3, two of the beams always oscillate in phase with one anotherwhile the third beam vibrates with a different phase. For weak coupling, the phase of that third beam ismodulated and it is slightly off of the other beams. For strong coupling, the third beam oscillates completelyin anti-phase, i.e., half-period out of phase, with respect to the other two beams. We wish to emphasize thatamong the three branches of solutions, the IP solution is stable over longer intervals of coupling strength.In fact, it is globally asymptotically stable over a small interval of negative values of the coupling strengthand, more importantly, for all positive values of coupling strength. From an engineering standpoint, thisstability result is important. That is, if this pattern can produce more combined energy, then it should be

September 23, 2014 8:48 energy˙harvesting˙v6
Arrays of Coupled Magnetostrictive Energy Harvesters 9
Fig. 4. One-parameter bifurcation diagram for a 1D array of N = 3 energy harvester beams coupled mechanically andinductively. On the left, no forcing is applied. On the right, a sinusoidal forcing term leads to three branches of collectivebehavior. Parameters are: ωr = 0.9, Q = 100, α = 1, κ2 = 0.2, γ = −1, µ = 0.1. Along Branch 1 complete synchronization, inwhich all beams oscillate with the same phase and amplitude and same mean values, is obtained. In Branch 2, the beams alsooscillate in synchrony but with a nonzero mean. In Branch 3, two of the beams oscillate in phase while the third one oscillateswith a different phase.
relatively easy to tune up an actual device to lock onto the IP regime. Branch 3 is also stable and canyield large amplitudes of oscillations but its stability region spans a smaller interval of coupling strength.Fig. 5 illustrates representative patterns of oscillation for each branch. We also notice the appearance ofstable and unstable torus bifurcations. We do not trace, however, these secondary bifurcations since we aremainly interested in primary bifurcations as potential patterns for an energy harvesting system.
Meso-scale Analysis
At the mesoscale size, the separation among the beams can be significant enough to render the inductancecoupling negligible, i.e., M = 0. A similar bifurcation diagram was generated for this case and is shown inFig. 6(a). Branch 1 denotes again a collective pattern of complete synchronization. Branch 2 of unstablesynchronized oscillations emerges again via a subcritical pitchfork bifurcation off of Branch 1 at the samecritical value of coupling strength λc = −0.333. Since the oscillations are unstable, it is not practical topursue these solutions further for an energy harvesting design; But as many other new branches emerge,the complexity of the bifurcation diagram increases significantly. We notice, in particular, the appearanceof many period-doubling bifurcations. As for stability results, again, for strong coupling, the synchronizedIP solution remains globally asymptotically stable but the amplitudes of the IP oscillations are relativelysmall, just as before when M 6= 0. However, for weak coupling there is a relatively large region, labeledU in Fig. 6(a) and magnified in Fig. 6(d), where the IP solution is globally asymptotically stable andthe oscillations exhibit large amplitudes. This region is an ideal candidate to operate the coupled energyharvester system because it offers the potential to convert vibrational energy into large amount of power.Two additional branches of IP solutions are Branch 4 and 5. These branches are similar to Branch 2 wheretwo beams vibrate with the same nonzero mean while the third one vibrates with a different mean. Theyare mostly unstable. Branches 3, 6 and 7 represent Traveling Wave patterns.
4. Resistive-Capacitive Load
In this section we consider a load capacitor attached to the lumped circuit, so that it can store the generatedcharge. The rationale for this addition is to seek a reduction in the complexity of the bifurcation diagram

September 23, 2014 8:48 energy˙harvesting˙v6
10 A. Matus-Vargaset al.
0 5 10 15
−0.2
−0.1
0
0.1
0.2
0.3
t
X1, X
2, X3
−1 −0.5 0 0.5 1−1
−0.5
0
0.5
1
θ1
θ2, θ
3
−0.4−0.2
00.2
−0.5
0
0.5−0.4
−0.2
0
0.2
0.4
X1
X2
X3
(a)Branch 1, λr = −0.05
0 5 10 150
0.05
0.1
0.15
0.2
0.25
0.3
0.35
t
X1, X
2, X3
−6 −4 −2 0 2 4−5
−4
−3
−2
−1
0
1
2
3
θ1
θ 2, θ3
00.1
0.20.3
0.4
0
0.2
0.40
0.1
0.2
0.3
0.4
X1
X2
X3
(b)Branch 2, λr = −0.31
0 5 10 15−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
t
x1
x2, x
3
−8 −6 −4 −2 0 2−5
−4
−3
−2
−1
0
1
2
θ1
θ 2, θ3
−0.5
0
0.5
−1
0
1−1
−0.5
0
0.5
1
X1
X2
X3
(c)Branch 3, weak coupling regime, λr = −0.05
0 5 10 15−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
t
x1
x2, x
3
−4 −2 0 2 4−7
−6
−5
−4
−3
−2
−1
0
θ1
θ 2, θ3
−1
0
1
−0.5
0
0.5−0.4
−0.2
0
0.2
0.4
X1
X2
X3
(d)Branch 3, strong coupling regime, λr = 0.5
Fig. 5. Time series, angles and phase-space plots for representative patterns of solutions along Branches 1-3 of Fig. 4 generatedby the continuation software AUTO. For Branch 1, all three beams oscillate in complete synchronization, same phase andamplitude and same mean values. In Branch 2, the beams also oscillate in synchrony but with a nonzero mean. In Branch 3,two of the beams oscillate in phase while the third one oscillates with a different phase. Only the complete synchronizationsolution, along Branch 1, is stable.
of Fig. 6. Indeed, the entanglement of so many branches of solutions has the potential to complicatethe operation of an array of energy harvester system [Sodano et al., 2003]. We show in this section thatconversion to voltage can, however, significantly simplify the underlying bifurcations of the array device tothe make the design a viable choice to pursue.

September 23, 2014 8:48 energy˙harvesting˙v6
Arrays of Coupled Magnetostrictive Energy Harvesters 11
Fig. 6. (a) One-parameter bifurcation diagram for a 1D array of N = 3 energy harvester beams coupled mechanically only.(b) - (d)show magnified regions of Sections L, R and U. Parameters are: ωr = 0.9, Q = 100, α = 1, κ2 = 0.2, γ = −1,µ = 0. Branch 1 corresponds again to complete synchronization of oscillations with zero mean in the three beams; Branch 2synchronization with non-zero mean oscillations and Branch 3 in which two beams oscillate in synchrony while the third oneis out of phase. Four additional Branches 4-7 appear now. In Branches 4 and 5 the solutions are topologically conjugate tothose of Branch 2 while Branches 6 and 7 contain traveling waves topologically conjugate to those of Branch 3.
4.1. Model Equations
The voltage across the load capacitor is Vj(t) and its current is ij(t) = CLVj(t). We assume again amesoscale implementation so that inductance coupling is negligible. Then the model equation (3) can berecasted as
d2zjdt2
+ 2δdzjdt
+ ω20zj +
k3m
z3j +λ
m
N∑
k=1
zk =Ad
mcos(wdt) −
G
mij
LcCLd2Vj
dt2+ CL(RL +Rc)
dVj
dt+ Vj = G
dzjdt
.
(6)

September 23, 2014 8:48 energy˙harvesting˙v6
12 A. Matus-Vargaset al.
Re-scaling time and beam displacement as in Section 3 and defining a dimensionless voltage through
Vj(t) =k1
CLω0G
√k1|k3|
Uj(τ),
with derivatives
d
dtVj(t) =
k1CLG
√k1|k3|
U ′j(τ),
d2
dt2Vj(t) =
ω0k1CLG
√k1|k3|
U ′′j (τ),
yields the following equations in dimensionless form
x′′j (τ) +1Qx′j(τ) + xj(τ) + γx3j (τ) + λr
N∑
k=1
xk = Fr cos(ωrτ) − U ′j(τ)
U ′′j (τ) + αU ′
j(τ) +1
LcCLω20
Uj(τ) = κ2x′j(τ).
(7)
4.2. Bifurcation Results
The bifurcation diagram for the array of harvesters with resistive-capacitive load appears in Fig. 7. Overall,the diagram shows significantly less complexity especially when it is compared against that of the arrayof harvesters with resistive load of Fig. 4 and Fig. 7. In particular, Branch 1 of zero-mean synchronizedoscillations is the only branch of solutions that exists for small and large values of coupling strength λ.This branch is globally asymptotically stable/unstable for large positive/negative values of λ, but theoscillations show small amplitude. For small (positive) values of coupling strength, Branch 1 exhibits a sortof coupling hysteresis behavior as multi-stability arises due to the presence of a saddle-node bifurcationaround λ = 0.02. Small-amplitude in-phase limit cycle oscillations and another limit point bifurcation existjust slightly to the right of λ = 0.02 which leads to large-amplitude in-phase oscillations. This latter limitpoint bifurcation defines the region of interest to operate the array of voltage-based energy harvesters. Forslightly larger (negative) values of λ, the stable large-amplitude of in-phase oscillations that appear via thelimit-point bifurcation become unstable as an almost circular branch of non-zero mean oscillations appearvia a pitchfork bifurcation, just as they did in the harvester with resistive load.
4.3. Perturbation Analysis
In order to design and operate an actual device of the proposed coupled energy harvester system, it isimperative to find an explicit analytic expression of the Hopf bifurcation curve that limits the transitionfrom steady-state solutions into coupling-induced oscillations. To accomplish this task, we apply a two-timescale perturbation analysis [Nayfeh, 2004; Rand, 2012] on a dimensionless version of the model equations:
x′′
j +ε
Qx
′
j + xj + εγx3j + ελ
N∑
k=1
xk = εFr cos(wrt)− εy′
j
y′′
j + εαy′
j + kyyj = εκ2x′
j ,
(8)
where ky = 1/LcCLω20, ()
′ denotes differentiation with respect to τ , and j = 1, 2, 3. Thus we seek anasymptotic expansion for xj and yj in powers of ε as
xj(ξ, η) = x0j(ξ, η) + εx1j(ξ, η) + ε2x2j(ξ, η) + . . .yj(ξ, η) = y0j(ξ, η) + εy1j(ξ, η) + ε2y2j(ξ, η) + . . . ,
(9)
where ξ = ωrτ denotes the fast scale while η = ετ denotes the slow scale. To introduce these two-timescales into (8), we need the expressions for the first and second derivatives of x and y with respect to τ ,

September 23, 2014 8:48 energy˙harvesting˙v6
Arrays of Coupled Magnetostrictive Energy Harvesters 13
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
-1 -0.5 0 0.5 1
λr
maxX1
0.3
0.35
0.4
0.45
0.5
0.55
0.6
0.65
-0.16 -0.14 -0.12 -0.1 -0.08 -0.06 -0.04 -0.02
LP
LP
0.3
0.35
0.4
0.45
0.5
0.55
0.6
0.65
0.02 0.025 0.03 0.035 0.04
LP LP
LP
LP
LP
LP
1
2
3
11
Stable Torus Bifurcation
LP Limit Point
Bifurcation Point
Fig. 7. One-parameter bifurcation diagram for a 1D array of N = 3 voltage energy harvester beams coupled mechanically.On the left, no forcing is applied. Parameters are: ωr = 0.9, Q = 100, α = 1, κ2 = 0.2, γ = −1, µ = 0.0, 1/LcCLω
2
0 = 0.1.
which we obtain through the chain rule:
dxjdτ
= ωr∂xj∂ξ
+ ε∂xj∂η
,
d2xjdτ2
= ω2r
∂2xj∂ξ2
+ 2εωr∂2xj∂ξ∂η
+ ε2∂2xj∂η2
,
dyjdτ
= ωr∂yj∂ξ
+ ε∂yj∂η
,
d2yjdτ2
= ω2r
∂2yj∂ξ2
+ 2εωr∂2yj∂ξ∂η
+ ε2∂2yj∂η2
.
(10)
We also expand xj and yj in a truncated Fourier series of ε:
xj = x0j + ε(x1j +A1j cos ξ +B1j sin ξ)+ε2(x2j +A2j cos ξ +B2j sin ξ + E2j cos 2ξ + F2j sin 2ξ) + . . .
yj = y0j + ε(y1j + C1j cos ξ +D1j sin ξ)+ε2(x2j + C2j cos ξ +D2j sin ξ +G2j cos 2ξ +H2j sin 2ξ) + . . .
(11)
Substituting (9)-(11) into the governing equations (8) yields, after collecting equal powers of ε, a set ofpartial differential equations (PDE) associated with each order term. Details of the calculations are rathertechnical but they can be found in Appendix 1. Solving the PDE equations (A.1)-(A.3), we arrive at theclosed form solutions for x0j , y0j, x1j , y1j, x2j , and y2j . These solutions are then substituted into Eq. (9) toobtain analytic approximations to xj and yj for the energy harvesting system (8), up to O(ε). Fig. 8 showsa comparison of this approximation against a numerical solution for a representative value of the couplingstrength. Overall, the accuracy of the approximation is very good. More importantly, the perturbationanalysis yields the critical value λc = −1/3 at which the harvesters become fully synchronized.
5. Hamiltonian Analysis
For larger array sizes, the governing equations are, however, not amenable to similar perturbation basedanalyses. To circumvent this problem, we employ a different approach. First, the governing equations,without forcing and damping, are reformulated in a Hamiltonian structure. In fact, since the scale of

September 23, 2014 8:48 energy˙harvesting˙v6
14 A. Matus-Vargaset al.
Fig. 8. Comparison of asymptotic approximation up to O(ε) and numerical solutions for the vibrations of an energy harvestingsystem.
the damping coefficient δ is significantly smaller than that of the natural frequency, its exclusion will benegligible on the calculation of the bifurcation points associated with stable synchronization. Similarly,since we are interested in a weak forcing regime we can set Fr = 0 and conduct a stability analysis ofbifurcations of equilibria, which become foliated by periodic solutions when the forcing term is turn on.Then the isotypic decomposition of the phase space RN under the action of the group of symmetriesSN , which describes the permutations of N objects that correspond to the all-to-all coupling, is used tostudy the linearized system of equations. This approach allows us to calculate an approximate analyticalexpression for the critical value of coupling strength at the onset of synchronization. More importantly,the expression is valid for any network size N and remains valid under nonzero weak coupling.
We assume again a mesoscale implementation so that inductance coupling is negligible. Then the modelequation (3) can be rewritten as
d2zjdt2
+ 2δdzjdt
+ ω20zj +
k3m
z3j +λ
m
N∑
k=1
zk =Ad
mcos(wdt) −
GCL
m
dVj
dt
LcCLd2Vj
dt2+ CL(RL +Rc)
dVj
dt+ Vj = G
dzjdt
.
(12)
Re-scaling time and beam displacement as in Section 3 and defining a dimensionless voltage through
Vj(t) =k1κ
CLω0G
√k1|k3|
Uj(τ),
with derivatives
d
dtVj(t) =
k1κ
CLG
√k1|k3|
U ′j(τ),
d2
dt2Vj(t) =
ω0k1κ
CLG
√k1|k3|
U ′′j (τ),
yields the following equations in dimensionless form
x′′j (τ) +1Qx
′j(τ) + xj(τ) + γx3j(τ) + λr
N∑
k=1
xk = Fr cos(ωrτ) − κU ′j(τ)
U ′′j (τ) + αU ′
j(τ) + βUj(τ) = κx′j(τ),
(13)
where β = 1/(LcCLω20). Observe that now under this re-scaling the coefficient κ appears in front of both
coupling derivative terms of Eq. (13), which will allow us to cast the equations in Hamiltonian form. Indeed,

September 23, 2014 8:48 energy˙harvesting˙v6
Arrays of Coupled Magnetostrictive Energy Harvesters 15
disregarding the damping terms and the period forcing in (13) without self-coupling, we may rewrite thesystem as
x′′i (τ) + xi(τ) + γx3i (τ) + λr
n∑
j=1j 6=i
xj(τ) = − κu′i(τ)
u′′i (τ) + βui(τ) = κx′i(τ).
(14)
The case with self-coupling is treated in a similar manner and show the results for both cases but forbrevity we include the details only for the case without self-coupling.
Let qi = (qi1, qi2)T = (xi, ui)
T and pi = q′i +Kqi, with
K =1
2
(0 κ−κ 0
).
Since
q′′i =
(x′′i
u′′i
)=
−xi(τ)− γx3i (τ)− λr
∑
j→i
xj(τ)− κu′i(τ)
−βui(τ) + κx′i(τ)
,
we can write the derivative of pi as
p′i = Λqi −Kq′i − fi − λr
∑
j→i
Γqj,
where Λ =
(−1 00 −β
), fi =
(γx3i (τ)
0
), and Γ =
(1 00 0
). Thus in vector form, the system can be written
as (q′ip′i
)=
(−K I2
Λ+K2 −K
)(qipi
)−(
0fi + λr
∑j→i Γqj
).
Now, let Yi = (qi, pi)T , M1 =
(−K I2
Λ+K2 −K
), M2 =
(0 0
−λrΓ 0
), and Fi =
(0
−fi
). Then the entire
coupled energy harvesting system can be written as
Y ′ = MY + F, (15)
where
Y =
Y1
Y2...
YN
, M =
M1 M2 . . . . . . M2
M2 M1 M2 . . . M2...
. . .. . .
......
. . .. . .
...M2 . . . M2 M1
, and F =
F1
F2...
FN
.
A direct calculation shows that the system in (15) is Hamiltonian with respect to
J = diag (J4, . . . , J4)︸ ︷︷ ︸N times
, (16)
with J4 =
(0 I2
−I2 0
). The corresponding Hamiltonian is
H(Y (qi, pi)) =1
2Y TJ−1MY +
n∑
i=1
γq4i14.
Next we study the linearized system near the origin starting with the SN isotypic decomposition of thetangent space, where SN is the group of permutations of N objects induced by the all-to-all coupling. Thisleads to a block diagonal decomposition from which the eigenvalues can be obtained explicitly and theirdistribution can be studied for all N ∈ N. In particular, we determine for general N , a threshold conditionfor the origin to lose spectral stability as the coupling parameter λ is varied.

September 23, 2014 8:48 energy˙harvesting˙v6
16 A. Matus-Vargaset al.
5.1. Isotypic Decomposition
Let IN denote the identity matrix in RN . We can write the generators of SN in R
N as the set
σi : i = 1, . . . , N − 1,where σi is the matrix obtained by swapping columns i and i+1 of IN . Since the phase space of the systemis R4N , we can write its generators as
ξ := ξi = σi ⊗ I4 : i = 1, . . . , N − 1.For ζ = exp (2πi/N ) and some v ∈ R, let vj = (v, ζjv, ζ2jv, . . . , ζ(N−1)jv)T be a vector in C. Suppose
j = 0, . . . , N − 1, then the vectors vj form a basis for CN . Observe that the basis decomposes CN into
CN = V0 ⊕ V1,
where V0 = (z1, . . . , zN ) ∈ CN |z1 + · · · + zN = 0 and V1 = (z, . . . , z)|z ∈ C are invariant subspaces.
Note also that the vectors vj , with j = 0, form a basis for the subspace V1 while the remaining vectors vj ,j = 1, . . . , N − 1, form a basis for the subspace V0.
Given that each energy harvester has an internal phase space of dimension four, let
e1 =
1000
, e2 =
0100
, e3 =
0010
, e4 =
0001
,
and define
vji = (ei, ζjei, ζ
2jei, . . . , ζ(N−1)jei)
T ,
for i = 1, 2, 3, 4. This set of 4N vectors form a basis for the system. We need to verify that for the symplecticform ω(u, v) = uTJv, with u, v ∈ C
4N and J given by (16), ω(vji, vkℓ) = 0 holds for any pair vji, vkℓ in thebasis of C4N . Direct calculations yield
ω(vji, vkℓ) = vTjiJvℓk =n−1∑
m=0
ζm(j+ℓ)eTi J4ek = eTi J4ek
N−1∑
m=0
ζm(j+ℓ),
and note thatN−1∑
m=0
ζm(j+ℓ) = 0,
for any combination of j, ℓ. The corresponding real symplectic transition matrix P is constructed usingthe normalized real and imaginary parts of the vectors vji for complex vectors and just the normalizedvji if it is real. For complex vector vji, let ℜji and ℑji denote its real and imaginary parts, respectively.Furthermore, we denote a normalized vectors by ·. For N odd, the real symplectic transition matrix is
P =[v01, . . . , v04, ℑ11, ℜ11, . . . , ℑ14, ℜ14, . . . , ℑ⌊N/2⌋1, ℜ⌊N/2⌋1, . . . , ℑ⌊N/2⌋4, ℜ⌊N/2⌋4
].
Similarly, the corresponding real symplectic matrix for N even is
P =[v01, . . . , v04, ℑ11, ℜ11, . . . , ℑ14, ℜ14, . . . ,
ℑ(N/2−1)1, ℜ(N/2−1)1, . . . , ℑ(N/2−1)4, ℜ(N/2−1)4, v(N/2)1, . . . , v(N/2)4
].
From the basis chosen, the complexified phase space can now be written as(CN)4
= (V0)4 ⊕ (V1)
4 ,
where (V0)4 and (V1)
4 are invariant subspaces with respect to ξ.Applying P to the linear part of (15), we obtain the following diagonalization of the linear part of the
coupled energy harvesting array
M := P−1MP = diag (M0,M1, . . . ,M1) , (17)
where M0 = M1 + (N − 1)M2 and M1 = M1 −M2.

September 23, 2014 8:48 energy˙harvesting˙v6
Arrays of Coupled Magnetostrictive Energy Harvesters 17
5.2. Characteristic Polynomial
Given the structure of the linear part of the system shown in (17), we only need to study the matrices M0
and M1 in order to understand the eigenvalues of the system. The matrix
M0 = M1 + (N − 1)M2 =
0 −κ/2 1 0κ/2 0 0 1
−1− κ2/4− (n− 1)λr 0 0 −κ/20 −β − κ2/4 κ/2 0
,
has corresponding characteristic polynomial
y4 +(β + κ2 + 1 + (N − 1)λr
)y2 + β + βλr(N − 1),
whose roots are
±
√√√√− (β + κ2 + 1 + (N − 1)λr)±√
(β + κ2 + 1 + (N − 1)λr)2 − 4(β + βλr(N − 1))
2.
Similarly, the matrix
M1 = M1 −M2 =
0 −κ/2 1 0κ/2 0 0 1
−1− κ2/4 + λr 0 0 −κ/20 −β − κ2/4 κ/2 0
,
has corresponding characteristic polynomial
y4 +(β + κ2 + 1− λr
)y2 + β(1− λr),
whose roots are
±
√√√√− (β + κ2 + 1− λr)±√(β + κ2 + 1− λr)
2 − 4(β(1 − λr))
2.
5.3. Eigenvalues
Observe that the characteristic equations of both matrices, M0 and M1, have the same form
y4 + by2 + c = 0. (18)
Thus, we will first investigate this equation in general and then apply the results to the characteristicequations of the M0 and M1 matrices. We start by writing the roots of (18) in the form
±
√−b±
√b2 − 4c
2. (19)
Since we want the system to be spectrally stable, i.e., all eigenvalues with zero real parts, we need toinvestigate the following cases sperately.
Case 1: b2 − 4c > 0, i.e.√b2 − 4c ∈ R
In this case, the roots are purely imaginary if−b±
√b2 − 4c
2≤ 0 or if c ≥ 0.
Case 2: b2 − 4c = 0
In this case, b ≥ 0 must hold for the eigenvalues to be purely imaginary.

September 23, 2014 8:48 energy˙harvesting˙v6
18 A. Matus-Vargaset al.
Case 3: b2 − 4c < 0, i.e.,√b2 − 4c ∈ C
In this case, the roots can be written as
±
√−b± i
√4c− b2
2.
In general, the square root of a complex number v + iw can be written as
1
2
√2√
v2 + w2 + 2v − 1
2icsgn (∓w + iv)
√2√
v2 + w2 − 2v
Thus, in this situation, v = − b
2and w =
√4c− b2
2. We require that the roots be purely imaginary, yielding
1
2
√√√√√2
√√√√(− b
2
)2
+
(√4c− b2
2
)2
+ 2
(− b
2
)= 0,
which reduces to
4c− b2 = 0.
5.4. Application to M0 and M1
We now apply these results to the the characteristic equations of M0 and M1. Based on the values of theparameters, only Case 1 applies but the other two cases are shown for completeness.
Case 1
For M0, c = β + βλr(N − 1). Direct substitution and simplification of the condition c ≥ 0 leads to thecritical value of coupling strength: λr ≥ −1/(N − 1). It follows that a bifurcation occurs at the criticalvalue of coupling strength
λc = − 1
N − 1. (20)
For M1, c = β(1 − λr). Again, substitution into c ≥ 0 leads to λr ≤ 1. It follows that a secondbifurcation points occurs at λc = 1. Numerical simulations show that the oscillations that emerge off thispoint when the forcing term is turn on have rather small amplitude, i.e., small power output. For thisreason, we do not pursue the analysis of this bifurcation any further.
For the system with self-coupling, similar calculations show that the bifurcation point with respect toλr changes slightly to
λc = − 1
N. (21)
For the special case of N = 3, Eq. (21) yields λc = −0.333, which corresponds to the subcriticalpitchfork bifurcation identified in Fig. 4(left) for a coupled energy harvesting system with zero forcingFr = 0. Observe now in Fig. 4(right) that increasing the forcing by a small amount does not lead to adrastic change in the bifurcation point. In fact, numerical simulations show that Eq. (20) is a good analyticalapproximation to the onset of stable synchronized oscillations that emerge through the subcritical pitchforkbifurcation shown in Fig. 4(right).
Since λr is not part of the characteristic polynomial ofM1, there is no corresponding second bifurcationpoint in this case.

September 23, 2014 8:48 energy˙harvesting˙v6
Arrays of Coupled Magnetostrictive Energy Harvesters 19
Case 2
For M0, b = β + κ2 + 1+ (N − 1)λr. Direct substitution and simplification of the condition b ≥ 0 leads tothe following critical value of coupling strength:
λr ≥−β − κ2 − 1
(N − 1).
For M1, b = β + κ2 + 1− λr. Again, substitution into b ≥ 0 leads to
λr ≤ β + κ2 + 1.
Case 3
For M0, 4c− b2 = 4(β + βλr(N − 1))− (β + κ2 + 1 + (N − 1)λr)2 = 0. Solving for λr, we get
λr =−1− κ2 + β ± 2κ
√−β
N − 1.
For M1, 4c− b2 = 4β − 4β λ−(β + κ2 + 1− λ
)2= 0. Again, solving for λr, we get
λr = κ2 − β + 1± 2κ√
−β.
6. Validation
In this section we present preliminary results of ongoing experimental works aimed at validating theproposed models of arrays of energy harvesters with composed beams. Of particular interest is to estimateparameter values that can guide the ongoing modeling and analysis tasks. We wish to emphasize that theresults presented in this section are preliminary in nature. They are intended to validate the proposedmodeling approach. However, details of experimental results will be disseminated in future manuscripts.
6.1. Parameter Estimation
In order to validate the accuracy of the models, various composite beams with Galfenol as the main materialand with aluminum as the substrate were wrapped with 35 gauge magnet wire for the coil. The beamswere fitted to the test apparatus on top of the shaker using Plexiglas or plastic plates to avoid interactionwith the shaker magnet. The shaker was driven by an amplifier, which was connected to the source of thedynamic signal analyzer. Various base clamping configurations and beam clamping methods were tried andan appropriate set up was created. Figure 9 shows the frequency response curves measured on a dynamicsignal analyzer. Here, base displacement and tip displacement were measured with laser sensors and theoutput of the sensor was converted to the actual displacement values. The beam clearly shows nonlinearbehavior, i.e. soft-spring response. That is, the resonance frequency shifts to the left, from 46.25 Hz to36.8 Hz, as the vibration is increased. For comparison purposes, dashed arrows show the trace of a linearresponse vs a nonlinear one. Soft-spring (nonlinear) response occurs due to the material compression-tension and the alignment of the magnetic poles while the beam is being vibrated. The nonlinear behavioris crucial for the coupled system in which the nonlinear behavior contributes to the synchronization of theindividual beams and can potentially increase the output power. The output of the coil across a resistorthat was matched to the coil resistance was measured at 35.2 mV. Note that this value depends on theshaker vibration, the material, the base clamp configuration and beam structure.
It was also observed that adding the coil on top of the sample creates an imbalanced lumped mass whichcan contribute to the lowering of the effective mass. Additionally, the coil spreads the frequency response.In other words, the coil lowers the quality factor Q (based on the mechanical displacement amplitude vs.excitation frequency curve). As expected, when the frequency is swept up and down, a hysteresis loop wasobserved for large vibration amplitudes. The width of the hysteresis loop grows as the vibration amplitudeincreases.

September 23, 2014 8:48 energy˙harvesting˙v6
20 A. Matus-Vargaset al.
Fig. 9. Frequency response curves of the composite fixed-free beam: normalized frequency response with tip displacementdivided by base acceleration divided by Earths gravity vs excitation frequency. Beam response curves show nonlinear behaviorsince resonance frequency shifts to the left with increased vibrations. For comparison purposes, dashed arrows show nonlinearvs. linear responses.
Experiments were carried out for the spring constant, mechanical to electrical transduction, and damp-ing. The measured data of one of the beams was used to develop the linear and nonlinear transducer model.Here, the shaker was vibrated at low amplitude to confine the vibration within the linear regime and thefrequency response curves for the tip displacement and base displacement were used to determine the rel-ative tip displacement (Tipdisp – Basedisp) over the base acceleration. The spring constant was measuredusing weight vs. displacement measurements and the resonance frequency was measured as 46.25 Hz. Us-ing these values, the value of effective mass m or beam inductance Lc was determined. Using this valueof effective mass as an approximation, the damping parameter b or beam resistance RL was derived bythe Levenberg-Marquardt algorithm. The parameters for the coil were measured on the LCR meter. Thevalue of transduction factor G was determined by two methods: from the mechanical side and from theelectrical side. For the mechanical side measurement, the current output of the coil across 10 MΩ resistor(open circuit) was measured for a given shaker vibration amplitude and corresponding tip velocity. Here,G is coil output voltage over tip velocity [V/(m/s)]. Conversely for the electrical side measurement, thecoil was connected to the voltage source and the output vibration was measured which was then convertedto corresponding force. Here, G is tip force over input current [F/A]. The two values were close to eachother and an average value was derived. The collective list of all parameter values was shown in Table 1.
6.2. Normalized Power Output
Three identical beams were fixed on a plastic disk in a triangular pattern as is shown in the top portion ofFig. 10. The normalized power (the measured power was divided by the measure base acceleration valuesand this ratio was again divided by Earths gravitational constant, 9.81 m/s2) vs. excitation frequencyis shown in the bottom panels. The uncoupled and coupled responses are shown in the top and bottomrows, respectively. The excitation amplitude of the shaker was increased from 100 mV to 500 mV and thecorresponding results are shown in the left, middle and right plots. It can be seen that the coupled systemdoes not synchronize at lower excitation amplitude; however, a synchronization pattern occurs, at higherexcitation amplitudes. We denote increment factor at the synchronized frequency as the ratio of the peakpower of a given beam in the coupled state vs. the one in the uncoupled state at that frequency. Here, theincrement factors at the synchronized frequency are 51.9, 29.76, and 30.49 for beam 1,beam 2, and beam3, respectively. The synchronized pattern in time domain showed two resonators in phase and one out ofphase by half a period, which requires additional modification in the power converter circuit (ideally allthree resonators would be in phase). The synchronized frequency of the coupled system is higher than the

September 23, 2014 8:48 energy˙harvesting˙v6
Arrays of Coupled Magnetostrictive Energy Harvesters 21
Fig. 10. Experimental results of the coupled system with N = 3 in chain configuration: from left to right, the sourceamplitude=100mV, 300 mV, and 500 mV. The top row and bottom row correspond to uncoupled responses and coupledresponses, respectively.
natural frequency of the individual resonators due to the additional modes introduced by the substrate.
7. Discussion
We have shown proof of concept that an array of vibratory energy harvesters, coupled mechanically andinductively, can produce, under certain conditions that depend mainly on the coupling strength, collectivepatterns of oscillations. Among the many different patterns, synchronization behavior is of particular im-portance because, in principle, it can be used to form a coherent power output to a usable level to drivesome devices. A perturbation analysis shows that it is possible to find approximate analytical expressionsfor the critical coupling strength that leads to the stable synchronized solutions. The analysis is, however,complicated for it to be extended to arrays of arbitrary size, specially large arrays. An alternative ap-proach, based on casting the model equations in Hamiltonian form, with zero forcing and zero damping,leads to an approximate analytical solution for the onset of synchronization. The expression is a reasonableapproximation even under weak forcing and it can be very useful towards the design and operation of anarray of energy harvesters for higher combined energy production. In the analysis, we chose the modelequations representing the energy harvester constructed with magnetostrictive material, as a case study.However, we wish to emphasize that the fundamental principles of symmetry-driven spatio-temporal pat-terns of oscillations are model independent so that similar ideas of arrays of harvesters can be readilyextended to other arrays with different materials, for instance piezoelectric transduction. Finally, we notethat power production has not been discussed at this point because the entire experimental system is notfully optimized yet to give a realistic projection of the total power production from the coupled system.The optimization will be carried out mainly in the power converter part where the impedance matching,component sizes and load matching are very important to efficiently convert power to do useful work. Weplan to discuss this part of the system in a follow-up manuscript comparing theoretical and computationalresults against experiments.
Acknowledgments
A.P. and B.S. were supported by the Complex Dynamics and Systems Program of the Army ResearchOffice, supervised by Dr. Samuel Stanton, under grant W911NF-07-R-003-4. A.P. was also supported bythe ONR Summer Faculty Research Program, at SPAWAR Systems Center, San Diego. V.I. acknowledgessupport from the Office of Naval Research (Code 30) and the SPAWAR internal research funding (S&T)program. PLB acknowledges funding support from NSERC in the form of a Discovery Grant.

September 23, 2014 8:48 energy˙harvesting˙v6
22 A. Matus-Vargaset al.
Appendix A Perturbation Analysis
In this section we provide details of the perturbation analysis that yields asymptotic analytical approxima-tions to the solutions of the coupled energy harvesting system (8). Substituting (10) and (11) into (8) andneglecting terms of O(ε3), we get, after collecting equal powers of ε, a set of partial differential equationsfor each order term:Order ε0
ω2r
∂2x0j∂ξ2
+ωr
Q
∂x0j∂ξ
+ x0j + γx30j = −ωr∂y0j∂ξ
− λr
N∑
k=0
x0k
∂2y0j∂ξ2
+ωr
α
∂y0j∂ξ
+ kyy0j = κ2ωr∂x0j∂ξ
.
(A.1)
Order ε
ω2r
∂2x1j∂ξ2
+ 2ωr∂x0j∂ξ∂η
+1
Q
[wr
∂x1j∂ξ
+∂x0j∂η
]+ x1j + 3γx20jx2j = −
[wr
∂y2j∂ξ
+∂y0j∂η
]−
λr
N∑
k=0
x2k
ω2r
∂2y2j∂ξ2
+ 2ωr∂y0j∂ξ∂η
+1
α
[wr
∂y1j∂ξ
+∂y0j∂η
]+ kyy1j = κ2
[wr
∂x1j∂ξ
+∂x0j∂η
]
ω2r
∂2X1j
∂ξ2+
ωr
Q
∂X1j
∂ξ+X1j + 3γx20jX1j = cos(ωrτ)− ωr
∂Y1j
∂ξ−
λr
N∑
k=0
X1k
∂2Y1j
∂ξ2+
ωr
α
∂Y1j
∂ξ+ kyY1j = κ2ωr
∂X1j
∂ξ,
(A.2)
where
X1j = A1j cos ξ +B1j sin ξY1j = C1j cos ξ +D1j sin ξ.
Order ε2
ω2r
∂2x2j∂ξ2
+ 2ωr∂2x1j∂ξ∂η
+∂2x0j∂η2
+1
Q
[ωr
∂x2j∂ξ
+∂x1j∂η
]+
x2j + 3γx0j
(x0jx2j +
R1j
2
)= −
[ωr
∂y2j∂ξ
+∂y1j∂η
]−
λr∑N
k=0 x2k
ω2r
∂2y2j∂ξ2
+ 2ωr∂2y1j∂ξ∂η
+∂2y0j∂η2
+1
α
[ωr
∂y2j∂ξ
+∂y1j∂η
]+ kyy2j = κ2
[ωr
∂x2j∂ξ
+∂x1j∂η
]
ω2r
∂2X2j
∂ξ2+ 2ωr
∂2X1j
∂ξ∂η+
1
Q
[ωr
∂X2j
∂ξ+
∂X1j
∂η
]+
X2j + 3γx0j
(x0jX2j +
S1j
2
)= −
[ωr
∂Y2j
∂ξ+
∂Y1j
∂η
]−
λr∑N
k=0X2k
ω2r
∂2Y2j
∂ξ2+ 2ωr
∂2Y1j
∂ξ∂η+
1
α
[ωr
∂Y2j
∂ξ+
∂Y1j
∂η
]+ kyY2j = κ2
[ωr
∂X2j
∂ξ+
∂X1j
∂η
],
(A.3)

September 23, 2014 8:48 energy˙harvesting˙v6
Arrays of Coupled Magnetostrictive Energy Harvesters 23
where
X2j = A2j cos ξ +B2j sin ξ + E2j cos 2ξ + F2j sin 2ξY2j = C2j cos ξ +D2j sin ξ +G2j cos 2ξ +H2j sin 2ξR1j = A2
1j +B21j
S1j = (A21j −B2
1j) cos(2ξ) + 2A1jB1j sin(2ξ).
Next we solve Eq. (A.1) through Eq. (A.3). We start with Order ε0. Since x0j and y0j are equilibriumpoints (up to O(1)) then the derivative terms in (A.1) are all equal to zero, leading to the following set ofalgebraic equations for x0j and y0j:
x0j + γx30j = −λr
N∑
k=0
x0k, (A.4)
while y0j = 0, j = 1, 2, 3. Solving for x0j , we find that Eq. (A.4) admits the following sets of solutions.
Set I: x0j = y0j = 0, j = 1, 2, 3. Set II: x0j = ±√
−(1 + 3λr)/γ, y0j = 0. Set III: x0,1 = a, x0,2 = b, andx0,3 = c, y0j = 0, where a, b and c are expressions that depend on parameters, mainly λr and γ, but aretoo cumbersome to be written explicitly.
The trivial equilibrium solution in set I corresponds to the zero-mean oscillations of the coupled systemin which the vibrations of the harvesters are fully synchronized, i.e., they all oscillate with the same phaseand same amplitude. Recall that numerical simulations indicate that this solution is unstable for λ ≤ λc
and stable when λ > λc. When λ > λc, in particular, numerical simulations show a second synchronizationstate in which all harvesters oscillate in phase but with a non-zero amplitude. This state is unstable and itseems to correspond to solution set II above. By direct comparison of the mean oscillations between sets Iand II, we can deduct that the transition occurs at λc = −1/3, which agrees very well with the bifurcationdiagrams.
We now consider Order ε1. Solving the first two equations in (A.2) we get x1j = y1j = 0, j=1,2,3.Substituting X1j and Y1j in the last two equations of (A.2) leads to an algebraic linear system of equationsfor A1j , B1j , C1j , and D1j , j = 1, 2, 3, of the form
MV = ~b1,
where V = [A1j , B1j , C1j ]T , ~b1 = [1, 0, 0, 0]T , and M is a 4× 4 matrix given by
M =
−ω2r + 1 + 3γx201 + 3λr
wr
Q0 ωr
−wr
Q−ω2
r + 1 + 3γx201 + 3λr −ωr 0
0 −κ2ωr −ω2r + ky
ωr
ακ2ωr 0 −ωr
α−ω2
r + ky
.
We solve the resulting system of equations analytically via Maple which yields a unique solution forA1j , B1j , C1j , and D1j , j = 1, 2, 3, but we do not express that solution explicitly for brevity.
We now consider Order ε2. Solving the first two equations in (A.2) we get
x2j + 3γx0j
(x0jx2j +
A21j +B2
1j
2
)+ λr
N∑
k=0
x2k,
and y2j = 0, j = 1, 2, 3. Substituting X2j and Y2j in the last two equations of (A.3) yields two possiblesolutions sets. Set I: x0j = x1j = 0 and y0j = y1j = 0, A2j = B2j = C2j = D2j = 0 and E2j = F2j =G2j = H2j = 0, j = 1, 2, 3. The only nonzero terms are A1j , B1j , C1j and D1j , but they are again to
cumbersome to be shown explicitly. Set II: x0j = ±√
−(1 + 3λr)/γ, y0j = 0, x1j = y1j = 0, y2j = 0 andA2j = B2j = C2j = D2j = 0. The only nonzero terms are now x2j and E2j, F2j , G2j , H2j, j = 1, 2, 3, whichare too cumbersome to be displayed directly.

September 23, 2014 8:48 energy˙harvesting˙v6
24 REFERENCES
References
Beeby, S.P., Tudor, M.J. & White, N.M.[2006] “Energy harvesting vibration sources for microsystemsapplications”. Measurement Science and Technology, 17, R175-R195.
Erturk, A[2009]. Electromechanical Modeling of Piezoelectric Energy Harvesters. PhD thesis, Virginia Poly-technic Institute and State University, Blacksburg, VA, November (2009).
Gilbert, J.M. & Balouchi, F.[2008] “Comparison of energy harveting systems for wireless sensor networks.”International Journal of Automation and Computing, 5(4), 334–347.
Roundy, S., Wright, P.K. & Rabaey, J.M.[2004] Energy Scavenging for Wireless Sensor Networks. KluwerAcademic, Boston (2004).
Sodano, H.A., Park, G., Leo, D.J. & Inman, D.J.[2003] “Model of piezoelectric power harvesting beam”.In Proceedings of IMECE’03, pages 1–6, Washington, DC, November (2003). ASME InternationalMechanical Engineering Congress.
Lei, W. & Fuh-Gwo, Y.[2006] “Structural vibration energy harvesting by magnetostrictive materials(msm)”. In The Proceeding of 4th China-Japan-US Symposium on Structural Control and Monitoring,pages 1–8, October (2006).
Wang, L. & Yuan, F.G.[2008] “Vibration energy harvesting by magnetostrictive material”. Smart Materials
and Structures, 17, 045009, 2008.Barton, D.A.W. & Burrow, S.G. & Clare, L.R.[2010] “Energy harvesting from vibrations with a nonlinear
oscillator”. Journal of Vibrations and Acoustics, 132, 021009.Cottone, F., Vocca, H. & Gammaitoni, L.[2009] “Nonlinear energy harvesting”. Physical Review Letters,
102, 080601.Ferrari, M., Ferrari, V., Guizzetti, M., Ando, B., Baglio, S. & Trigona, C.[2009] “Improved energy harvesting
from widebrand vibrations by nonlinear piezoelectric converters”. Procedia Chem., 1, 1203–1206.Hu, Y., Xue, H., Jang, J. & Jiang, Q.[2006] “Nonlinear behavior of a piezoelectric power harvester near
resonance”. IEEE Trans. Ultrasonic Ferrolectrics and Frequency Control, 53, 1387–1391.Moehlis, J., DeMartini, B.E., Rogers, J.L. & Turner, K.L.[2009] “Exploiting nonlinearity to provide broad-
band energy harvesting”. In Proceedings of the ASME 2009 Dynamic Systems and Control Conference,Hollywood, CA, (2009).
Sebald, G., Kuwano, H., Guyomar, D. & Ducharne, B. “Simulation of a Duffing oscillator for broadbandpiezoelectric energy harvesting”. Smart Materials and Structures, 20, 075022.
Lien, I.C. & Shu, Y.C.[2012] “Array of piezoelectric energy harvesting by the equivalence impedanceapproach”. Fast Track Communication in Smart Materials and Structures, 21, 082001.
Hu, Y., Xue, H. & H. Hu.[2007] “A piezoelectric power harvester with adjustable frequency through axialpreloads”. Smart Materials and Structures, 16, 1961–1966.
McInnes, C.R., Gorman, D.G. & Cartmell, M.P.[2008] “Enhanced vibrational energy harvesting usingnonlinear stochastic resonance”. J. Sound and Vib., 318, 655–662.
Challa, V.R., Prasad, M.G. & Fisher, F.T.[2009] “A coupled piezoelectric-electromagnetic energy harvestingtechnique for achieving increased power output through damping matching”. Smart Materials and
Structures, 18, 095029.Stanton, S.C., McGehee, C.C. & Mann, B.P.[2009] “Reversible hysteresis for broadband magnetopiezoe-
lastic energy harvesting”. Appl. Phys. Lett., 95, 174103.Erturk, A., Hoffmann, J. & Inman, D.J.[2009] “A piezomagnetoelastic structure for broadband vibration
energy harvesting”. Appl. Phys. Lett., 94, 254102.Mann, B.P. & Owens, B.A.[2010] “Investigations of a nonlinear energy harvester with a bistable potential
well”. J. Sound and Vib., 329 1215–1226.Stanton, S.C., McGehee, C.C. & Mann, B.P.[2010] “Nonlinear dynamics for broadband energy harvesting:
Investigation of a bistable piezoelectric inertial generator”. Physica D, 239, 640–653.Mann, B.P & Sims, N.D.[2009] “Energy harvesting from the nonlinear oscillations of magnetic levitation”.
J. Sound and Vib., 319, 515–530.Liu, L. & Yuan, F.G.[2011] “Nonlinear vibration energy harvester using diamagnetic levitation”. Applied
Physics Letters, 98, 203507.

September 23, 2014 8:48 energy˙harvesting˙v6
REFERENCES 25
Van Blarigan, L., Danzl, P. & Moehlis, J.[2012] “A broadband vibrational energy harvester”. Applied
Physics Letter, 100, 253904.Vu, H., Palacios, A., In, V., Longhini, P. & Neff, J.[2010] “Two-time scale analysis of a ring of coupled
vibratory gyroscopes”. Physical Rev. E., 81, 031108,.Vu, H., Palacios, A., In, V., Longhini, P. & Neff, J.[2011] “A drive-free vibratory gyroscope”. Chaos, 21,
013103.Davies, N., H. Vu, Vu, H., Palacios, A., In, V. & Longhini, P.[2013] “Collective behavior of a coupled
gyroscope system with coupling along the drive and sense modes”. International Journal of Bifurcationand Chaos, 23(1), 1350006.
In, V., Bulsara, A., Palacios, A., Longhini, P., Kho, A. & Neff, J. “Coupling induced oscillations in over-damped bistable systems”. Physical Review E Rapid Communications, 68, 045102–1–0415102–4.
Turtle, J., Beauvais, K., Shaffer, R., Palacios, A., Emery, T., In, V. & Longhini, P. “Gluing bifurcations incoupled spin torque nano-oscillators”. Journal of Applied Physics, 113, 114901.
Nayfeh, A.[2004] Perturbation Methods. Wiley-VCH.Rand, R.[2012] Lectures Notes on Nonlinear Vibrations.Shu, Y.C. & Lien, I.C.[2006] “Analysis of power output for piezoelectric energy harvesting systems”. Smart
Mater. Struct., 15, 1499-1512.Doedel, E. & Wang, X. Auto94: Software for Continuation and Bifurcation Problems in Ordinary Differ-
ential Equations, Applied Mathematics Report, California Institute of Technology.Chicone, C.[2000] Ordinary Differential Equations with Applications. Springer (2000).