Embed Size (px)
Citation preview

IL NUOVO CIMENTO Vol. ?, N. ? ?
Dynamics of Alfven Waves in Tokamaks
G. Vlad, F. Zonca and S. Briguglio
Associazione EURATOM-ENEA sulla Fusione, C.R. Frascati, C.P. 65, 00044, Frascati, Rome,
Italy
(ricevuto ?; approvato ?)
Summary. — Theoretical analyses predict that shear Alfven waves may be drivenunstable by energetic particles (with energies in the MeV range) in thermonuclearplasmas, e.g., by fusion products. Indeed, these waves have been experimentallyobserved and – in certain circumstances – found to be responsible of significant en-ergetic particle losses. This fact, together with the possible detrimental effect ofthese instabilities on the plasma performance – in the perspective of a fusion reactor–, has attracted significant attention on the topic. The present review article isfocused on both linear stability and non-linear dynamics of shear Alfven in toka-maks, the presently most successful experimental machines devoted to the study offusion reactions via magnetic confinement of thermonuclear plasmas. The presenttheoretical investigation highlights both analytical and numerical approaches to theproblem.
PACS 52.35.Bj – Magnetohydrodynamic waves.PACS 52.35.Mw – Non-linear waves and non-linear wave propagation (includingparametric effects, mode coupling, ponderomotive effects, etc.).PACS 52.55.Dy – General theory and basic studies of plasma lifetime, particle andheat loss, energy balance, etc..PACS 52.55.Fa – Tokamaks.
November 6, 2003
1. – Introduction
The international research program on controlled thermonuclear fusion and its effortsto achieve reactor relevant conditions in magnetically confined plasmas have reachedtheir best results, to date, in experiments on machines of the tokamak type. Theseare experimental devices characterized by a toroidal symmetry, which is invariant forarbitrary rotations in the azimuthal angle about a symmetry axis, often called the toroidalaxis. In a tokamak, the plasma is confined by a strong azimuthal (toroidal) magnetic fieldof the order of some Tesla. Plasma equilibrium, furthermore, requires also the presenceof a poloidal magnetic field, which is much smaller than the toroidal field and is providedby a current flowing, in the plasma itself, along the azimuthal direction.
1

2 G. VLAD, F. ZONCA and S. BRIGUGLIO
Thermonuclear fusion is expected to occur in a tokamak plasma via deuterium-tritium (DT) reactions
D + T → 4He(3.52 MeV) + n(14.06 MeV) ,
which produce alpha particles and neutrons. The optimal operation conditions for afusion reactor are those in which fusion alpha particles are confined in the plasma andprovide the required energy input to keep the plasma in steady state. This plasmacondition is called ignition and is characterized by a self-sustained burning plasma whichprovides energy via the escaping thermonuclear neutrons. At present, no experimentaldevice has been capable to reach ignition, although the largest existing tokamaks haveapproached, and essentially reached, the so called breakeven condition, in which the totalfusion power (from thermonuclear neutrons and alphas) balances the required powerinput to maintain the plasma in steady state. The study and characterization of ignitedplasmas is the primary goal of an international collaboration project: the InternationalTokamak Experimental Reactor (ITER) [1].
Fusion power production has been experimentally demonstrated, to date, in two ofthe largest existing tokamaks, the Joint European Torus [2] (JET) and the TokamakFusion Test Reactor [3] (TFTR), of which only JET is still in operation. JET hasproduced, for the first time, 1.7 MW of DT fusion power in the Preliminary TritiumExperiment [4] (PTE, 1992). After JET PTE, other experiments have followed on TFTR,using optimal DT fuel mixtures and producing up to 10.7 MW of fusion power [5].More recently, after TFTR decommissioning, JET has obtained, during its second DTexperimental campaign, about 5 MW of DT fusion power for an extended operation ofroughly 4 s and a record peak fusion power of 16 MW [6].
As it may be clearly recognized from the considerations made so far, the confinementproperties of energetic particles in fusion plasmas are of major importance in determiningthe performance of current and future generations of machines operating near or atreactor relevant regimes. For example, the good confinement of alpha particles producedin the DT fusion reactions is necessary to ignite the DT plasma. Similarly, energeticions, produced by radio-frequency waves or by injection of neutral particle beams (withenergies ≈ 100 keV), must be well confined in order to successfully achieve plasma heatingand/or current drive. However, while the theoretical predictions of the energetic-particlelosses due to Coulomb collisions are sufficiently adequate, there remain serious concernsover “anomalous” losses induced by collective oscillations spontaneously excited by theenergetic particles.
Since the fusion alphas are born at 3.52 MeV mainly in the plasma center, the cor-responding pressure profile is peaked. As a consequence, the energetic-particle pressuregradient is a free energy source that can destabilize waves which resonantly interact withthe periodic motion of the energetic particles [7, 8, 9]. As typically in the case of pressure-gradient driven modes, the instability growth rates increase with the energetic-particlediamagnetic drift frequency which is proportional to the toroidal mode number n. Onthe other hand, characteristic frequencies of the energetic-particle motion (e.g., transitand bounce) are estimated to be in the Mhz range; similar to that of shear Alfven waves.This observations thus suggest that high-n (n 1) shear Alfven waves are the primecandidate for the instabilities.
Shear Alfven waves in a laboratory plasma are, however, difficult to excite, sinceenergy is needed to bend the magnetic field lines. Moreover, in a sheared magnetic field,the shear Alfven waves are characterized by a continuous spectrum [10]. Thus, these

DYNAMICS OF ALFVEN WAVES IN TOKAMAKS 3
waves are highly localized around the surface where ω = k‖vA (ω is the mode frequency,k‖ is the wave vector parallel to the magnetic field and vA = B/
√4π% the Alfven speed,
% being the plasma mass density), and strongly stabilized because of phase mixing.This situation, strictly valid in a slab, is qualitatively modified in toroidal confine-
ment devices due to the poloidal symmetry breaking associated with toroidal magneticfield inhomogeneities over a magnetic surface. The resultant couplings between neigh-bouring poloidal harmonics produces not only frequency gaps [11] in the continuous shearAlfven spectrum, but also discrete Alfven eigenmodes.
These discrete modes, known as Toroidal Alfven Eigenmodes [12, 13] (TAE’s), arelocalized in the forbidden frequency window (‘gap’) of the shear Alfven continuum. As aconsequence, TAE’s are undamped, to the lowest order, due to their negligible couplingto the continuum.
That TAE’s are marginally stable naturally suggests that energetic particles canresonantly destabilize these modes. Furthermore, these resonant energetic particles couldalso be effectively scattered by the resultant Alfvenic fluctuations. Indeed, it has beenshown that even low-amplitude TAE’s, with δB/B ≈ 5 × 10−4, can cause severe fusionalpha particles losses [14]. The study of the linear stability of TAE’s is, therefore, animportant issue for tokamak fusion research, and has attracted increasing theoretical aswell as experimental interest [15, 16, 17, 18, 19].
The linear TAE drive, due to the resonant interaction of the mode with the periodictransit of the passing energetic particles has been extensively studied [20, 21, 22, 23].The weakening effect on the linear drive because of resonance detuning due to finiteparticle drift orbits has also been considered [24, 25, 26]. Furthermore, it has beenpointed out [25, 26, 27] that both passing and trapped (between magnetic mirror points)particles play important roles in determining the linear drive.
A number of damping mechanisms have been suggested by various authors to bal-ance the energetic-particle linear drive and, hence, to determine the marginal stabilitythreshold for TAE’s. Electron Landau damping [20, 21, 22, 23] is typically negligi-ble, while ion Landau damping [23] and trapped electron collisional damping [28, 29]could be important depending on the plasma parameters [25]. Also non-ideal effectsof electron inertia and finite ion Larmor radius may significantly enhance the dampingrate [26, 30, 31, 32, 33, 34, 35] and even yield a new kinetic branch of the TAE modes, theKinetic Toroidal Alfven Eigenmodes [30] (KTAE’s). Another effective damping mecha-nism, due to the coupling of the TAE mode to the continuous shear Alfven spectrum,was suggested first in ref. [20] and studied in detail in refs. [36, 37, 38, 39] for the high-ncase, and in ref. [40] for low-n. In this case, the damping is a consequence of the toroidalmode coupling, which renders the TAE global radial mode width much broader than thetypical radial extent of a single poloidal harmonic [37].
In addition to ideal (TAE) and kinetic (KTAE) discrete plasma eigenmodes of theshear Alfven spectrum, tokamak plasma may be characterized by forced oscillations inthe presence of a sufficiently strong energetic particle free energy source. These forcedoscillations, called Energetic Particle Modes [41] (EPM’s), are excited via resonant inter-actions with fast, “hot”, ions [41, 42] and, thus, have the typical frequencies of particlemotions, i.e., ωtH (the “transit” frequency of fast ions around the toroidal plasma col-umn), ωbH (the “bounce” frequency associated with their periodic motion between twomagnetic mirror points for “trapped” energetic particles), and/or ωdH (the precessionrate in the toroidal direction of the trapped particle orbits). Since these forced oscil-lations have nothing to do with the presence of a frequency gap in the shear Alfvencontinuous spectrum, it is readily demonstrated that the threshold in the energetic par-

4 G. VLAD, F. ZONCA and S. BRIGUGLIO
ticle free energy in order to excite EPM’s is associated with the necessity to balance (atleast) the continuum damping due to coupling to the Alfven continuum [41].
Considering that small fluctuation levels of shear Alfven oscillations in a tokamakplasma can cause severe fusion alpha particles losses [14], it is not only important toanalyze the global stability properties of those waves, but also to understand their non-linear dynamics and the fundamental physical processes which, eventually, yield to sat-uration of these modes. Essentially, it is possible to classify the saturation mechanismsof Alfven modes in tokamaks in two major categories: those related to energetic particlenon-linearities, i.e., to the non-linear modifications of particle motions; and those asso-ciated with mode-mode couplings. The former of these processes are the most studiedin the literature, since the first work on non-linear dynamics of shear Alfven waves intokamaks [43], and are expected to be the most important for weakly unstable modes.However, it has been recently pointed out that also the latter processes may be impor-tant in determining non-linear mode saturation, depending on the considered plasmaequilibrium (see, e.g., ref. [44]). In any event, it is difficult to identify, in general, asingle specific physical process – falling in one of the two categories mentioned above –that may be thought to be the most relevant in determining the non-linear evolution ofshear Alfven waves in tokamaks and their effect on the energetic particle population. Infact, there may exist other non-linear dynamics, even stronger than the effects discussedabove, which may determine the saturated level of these instabilities. This is, e.g., thetypical case of EPM’s, as it may have been expected from the very definition of thesemodes as forced oscillations.
Both linear stability properties of shear Alfven waves in tokamaks and their non-linear dynamic evolution will be analyzed in the present review article, along with theconsequences that these modes may have on energetic particle confinement. Our goalis to give an as complete as possible overview of the major results, obtained in the lit-erature, on these topics. However, our treatment has, by no means, the aim of beingcomplete and exhaustive. We will rather try to summarize the present understanding ofthe matter, frequently referring to published papers for detailed derivations, and some-times only quoting results which would require a too specific discussion for the moregeneral viewpoint we have tried to maintain throughout the present work.
2. – Linear Theory
We wish to start the discussion of the general properties of the Alfven-wave spec-trum using simple-model equations, the so-called ideal magnetohydrodynamic (MHD)equations, which in Gaussian units read [45]:
∂%
∂t+ ∇ · (%v) = 0 ,(1)
%dv
dt= −∇P +
1
cJ × B ,(2)
d
dt
(P
%Γ
)= 0 ,(3)
E +1
cv × B = 0 ,(4)
∇× E = −1
c
∂B
∂t,(5)

DYNAMICS OF ALFVEN WAVES IN TOKAMAKS 5
∇× B =4π
cJ ,(6)
∇ · B = 0 .(7)
In the above equations v is the fluid velocity, J is the plasma current, B is the magneticfield, % is the mass density, P is the scalar pressure of the plasma, Γ is the ratio of thespecific heats, c is the speed of light, and
d
dt=
∂
∂t+ v · ∇(8)
is the convective derivative.The ideal MHD equations describe the plasma as a single fluid. In particular, eq. (1)
describes the time evolution of mass (conservation of the total number of particles).Equation (2) describes the time evolution of momentum, showing that the fluid is subjectto inertial, pressure-gradient and magnetic forces. Equation (3) is the equation of stateand generally describes the polytropic evolution of the plasma. It may be combined withthe continuity equation and written as
dP
dt= −ΓP∇ · v .(9)
Equation (4), the so-called ideal Ohm’s law, describes the plasma as a perfectly conduct-ing fluid (from which the expression “ideal MHD” originates). Note that in the moregeneral case in which plasma resistivity η is considered, eq. (4) is replaced by
E +1
cv × B = ηJ .(10)
Finally, the last three equations (eqs. (5), (6), (7)) are the low-frequency limit of theMaxwell equations. From eq. (6) it follows
∇ · J = 0 ,(11)
which is equivalent to neglect the displacement current in the Maxwell equations. Therelation ∇·J = 0 is also called the quasi-neutrality condition, and states that the chargedensity is locally zero and does not vary in time.
2.1. Waves in an infinite homogeneous plasma. – The ideal MHD model, in spite of
its simplicity, describes a very reach phenomenology, even in its linearized limit. Thus,it would be instructive to consider a very simple configuration to start with.
In this section we consider a homogeneous plasma of infinite extent, in which theequilibrium magnetic field is uniform and directed along the ez axis. No gradients arepresent at the equilibrium, so that the configuration is described by the following set ofequations:
% = %0 ,
v = 0 ,
P = P0 ,(12)
B = B0 = B0ez ,
J = 0 ,

6 G. VLAD, F. ZONCA and S. BRIGUGLIO
where %0, P0, B0 are constants. Next, we linearize the ideal MHD set of equations aroundthe above described equilibrium, assuming the following form for the generic perturbedquantity f :
f(r, t) = fe−i(ωt−k·r) .(13)
For simplicity, we also assume that the wave vector k lies in the (y, z) plane; moreover,we indicate with k⊥, k‖, respectively the perpendicular and parallel component of thewave vector with respect to the equilibrium magnetic field. From the linearized MHDequations, solving for the three components (δvx, δvy , δvz) of the perturbed velocity δv,it follows that
(ω2 − k2‖v
2A)δvx = 0 ,
(ω2 − k2⊥v
2S − k2v2
A)δvy − k⊥k‖v2Sδvz = 0 ,
− k⊥k‖v2Sδvy + (ω2 − k2
‖v2S)δvz = 0 ,
(14)
where k2 ≡ k2⊥ + k2
‖, vA ≡ (B20/(4π%0))
1/2 is the Alfven velocity and vS ≡ (ΓP0/%0)1/2
is the sound speed. The dispersion relation is obtained by setting the determinant of thecoefficients of the linear system, eqs. (14), to zero:
ω2 = k2‖v
2A ,
ω2 = 12k
2(v2A + v2
S)(1 ±
√1 − α2
),
(15)
where
α2 ≡ 4k2‖
k2
v2Av
2S
(v2A + v2
S)2.(16)
Since 0 ≤ α2 ≤ 1, three solutions are obtained from the dispersion relation eqs. (15),each of them corresponding to a purely oscillating motion.
The first branch of the dispersion relation eqs. (15),
ω2 = ω2A ≡ k2
‖v2A ,(17)
is known as the shear Alfven wave. It does not depend on k⊥ and corresponds to a purelytransverse wave, having the perturbed magnetic field parallel to the perturbed velocityand perpendicular to the equilibrium magnetic field B0ez. The wave travels along theequilibrium field lines with a group velocity
vgA = vAB0/B0.(18)
Thus the fluid element and the magnetic field line oscillate in phase (plasma frozen tothe magnetic field lines), behaving as a massive elastic string under tension. From theOhm’s law, eq. (4), it follows that the fluid motion is generated by the vE ≡ (c/B2) E×B
velocity. The motion is such that it makes the magnetic field lines to bend. Moreover,the motion is incompressible (∇ · v = 0); thus, the density and pressure perturbationsare zero (see eqs. (1) and (9)). The shear Alfven wave is essentially the result of thebalance between the inertia term (% dv/dt) and the magnetic field tension (J × B/c) inthe momentum equation, eq. (2), producing an oscillation between perpendicular plasmakinetic energy and perpendicular magnetic energy related to the field line bending.
The second and third branches of the dispersion relation are obtained from thesecond of eqs. (15). These branches correspond to oscillations in which the disturbancedepends on both the perpendicular and parallel wave vector components. For both

DYNAMICS OF ALFVEN WAVES IN TOKAMAKS 7
waves, the motion produces a compression of the magnetic field and a plasma-pressureperturbation (∇ · v 6= 0).
The second branch, corresponding to the plus sign in front of the square root ineqs. (15), is called the fast magneto-acoustic wave, being characterized by a frequencyω2 = ω2
F , such that it is always ω2A ≤ ω2
F . In the limit v2S/v
2A 1 – which physically
corresponds to the case of plasma β ≡ 8πP0/B20 (the ratio between the plasma kinetic
and the magnetic pressures) much less than unity – the fast magneto-acoustic wave isreduced to the so-called compressional Alfven wave, with
ω2F ≈ (k2
⊥ + k2‖)v
2A .(19)
In the low-β limit, it can be shown that the ratio between the perturbed plasma pressureand the perturbed magnetic pressure is O(β): thus, the compressional term is dominatedby the magnetic field pressure. Furthermore, the fluid is dominated by the perpendicularmotion. The fast magneto-acoustic wave essentially results from the balance betweenplasma inertia and magnetic field tension and compression in the momentum equation,eq. (2). Its group velocity is
vgF = vAk/k.(20)
The third branch, corresponding to the minus sign in front of the square root ineqs. (15), is called the slow magneto-acoustic wave, for it is characterized by a frequencyω2 = ω2
S , with ω2S ≤ ω2
A. Again, in the limit β 1, the slow magneto-acoustic wave isreduced to the so-called sound wave, with
ω2S ≈ k2
‖v2S .(21)
The fluid is dominated by the parallel motion, and the magnetic field compression is O(β)with respect to that of the fluid plasma. The slow magneto-acoustic wave is essentiallythe result of the balance between inertia and plasma compression in the momentumequation, eq. (2). Its group velocity is
vgS = vSB0/B0 .(22)
It can be shown [45] that the most dangerous modes in confined systems are thosecorresponding to incompressible motion. In fact, it can be shown that the work doneby an arbitrary displacement of the plasma to compress the fluid is always positive(corresponding to an increase of the potential energy), making the system more stable.Hence, the shear Alfven wave can be considered the most likely one to be driven unstableby the available sources of free energy always present in a confined system. Indeed, if oneinterprets [46] the terms k⊥vA and k‖vA as effective spring constants of the plasma subjectto a perturbed motion, in analogy to an harmonic oscillator, one can argue that the shearAlfven waves are more likely to be driven unstable than the compressional waves, beingk‖ < (k2
⊥ +k2‖)
1/2. In fact, a larger spring constant can be interpreted as a greater abilityof the plasma to maintain its state under an external perturbation. Moreover, it willbe shown later that, usually, in the confined systems of interest k2
‖ k2⊥ (Alfven waves
are typically characterized by parallel wavelength comparable to the system size), thusmaking the shear Alfven branch even more dangerous.
Finally, another important difference between shear and compressional Alfven wavesis related to the group velocity. For both branches it is equal to vA in magnitude.However, for the compressional wave the group velocity is directed along k (cf. eq. (20))and, thus, essentially across the magnetic field (since k2
⊥ k2‖), while it is directed

8 G. VLAD, F. ZONCA and S. BRIGUGLIO
along B0 (cf. eq. (18)) for the shear Alfven wave, making the latter more suitable to beresonantly excited by fast ions with v ' vA. Indeed, at least to the lowest order in theparticle gyroradius, the particle motion is directed along B0.
2.2. Waves in a non-uniform slab configuration. – Differently from the case discussed
in the previous section, a spatially confined plasma is characterized by equilibrium inho-mogeneities. Here, we study the simple configuration of a one-dimensional (1-D) plasmaslab confined in straight magnetic field [47, 48]. The equilibrium quantities (plasmadensity, pressure and magnetic field) are assumed to vary only along the x direction(% = %(x) = %0(x), P = P (x) = P0(x),B = B(x) = B0(x)). The equilibrium magneticfield is assumed to have a shear component,
B0(x) = B0y(x)ey +B0z(x)ez .(23)
The equilibrium pressure balance can be found using using eqs. (2) and (6)
d
dx
(P0 +
B20
8π
)= 0 .(24)
Again, we proceed by linearizing the ideal MHD eqs. (1- 7), introducing, for convenience,the displacement vector ξ of the fluid element, defined as
δv =∂ξ
∂t.(25)
The Faraday equation, becomes, after using the Ohm’s law, eq. (4),
δB = ∇× (ξ × B0) = (B0 · ∇)ξ − B0(∇ · ξ) − (ξ · ∇)B0 ,(26)
where δB is the linear perturbed magnetic field. Moreover, following ref. [48], the mo-mentum equation can be written as
%0∂2
∂t2ξ = −∇p+
1
4π(B0 · ∇)2ξ − 1
4πB0(B0 · ∇)(∇ · ξ) ,(27)
where we have defined
p = δP +δB · B0
4π(28)
as the total (kinetic plus magnetic) perturbed pressure. The perturbed plasma pressurecan then be obtained in terms of the displacement vector ξ from eq. (9)
δP = −ξxdP0
dx− ΓP0(∇ · ξ) .(29)
In the following, the generic perturbed quantity f is assumed to have the form:
f(r, t) = f(x)e−i(ωt−kyy−kzz) .(30)
Moreover, it is convenient to adopt the set of coordinates based on the parallel andperpendicular directions to the equilibrium magnetic field B0, defining e‖ ≡ B0/B0 ande⊥ ≡ e‖ × ex. Thus, the momentum equation, eq. (27), yields [48]
DAξ‖ =4π
B20
ik‖p+ ik‖
(ik‖ξ‖ + ik⊥ξ⊥ +
d
dxξx
),(31)
DAξ⊥ =4π
B20
ik⊥p ,(32)
DAξx =4π
B20
d
dxp ,(33)

DYNAMICS OF ALFVEN WAVES IN TOKAMAKS 9
where DA ≡ (ω2/v2A)−k2
‖ is the local shear Alfven propagator. Note that k‖ = (kyB0y+
kzB0z)/B0 and k⊥ = (kyB0z − kzB0y)/B0. Using eqs. (24), (26)and (28), one can writep in terms of the three components of ξ,
p = −ik‖ΓP0ξ‖ −(
ΓP0 +B2
0
4π
)(ik⊥ξ⊥ +
d
dxξx
).(34)
Solving eq. (31) for ξ‖ and substituting the obtained expression into eq. (34), fromeq. (32), it is possible to relate ξ⊥(x) to ξx(x), as
ξ⊥(x) =iαk⊥
αk2⊥ −DA
dξxdx
,(35)
where
α(x) ≡ 1 +Γβω2
2ω2 − Γβk2‖v
2A
.(36)
Differentiating eq. (32) with respect to x, making use of eq. (35) and substituting ineq. (33), we obtain the wave equation for ξx [48]:
d
dx
(B2
0DAα
αk2⊥ −DA
dξxdx
)−B2
0DAξx = 0 .(37)
Equation (37) describes again the three branches studied in the sect. 2.1, which are now
coupled together by equilibrium non-uniformities. It has to be noted that the differentialequation, eq. (37), – and hence its solution ξx – is singular at the points where B2
0DAα =0, which correspond to the appearance of two continuous spectra defined by
ω2 = ω2A(x) ≡ k2
‖(x)v2A(x) ,(38)
and
ω2 = ω2S(x) ≡
v2S(x)k2
‖(x)
1 + v2S(x)/v2
A(x).(39)
To further gain some insight on the properties of the continuous spectrum and, ingeneral, on the shear Alfven waves, we can proceed assuming, as above, that the equilib-rium plasma density varies along x, %0 = %0(x), but taking now a uniform equilibriummagnetic field without shear along the z coordinate B0 = B0ez, with the plasma be-ing confined by two perfectly conducting plates at z = 0 and z = L [49]. Moreover,let us adopt the slow sound wave approximation (Γβ → 0, or α → 1 in eq. (37)) toreduce eq. (37) to the description of the coupled shear and compressional Alfven waves.Note that in this limit it is sufficient to consider the perpendicular components of themomentum equation, eq. (27), which does not depend on the parallel component of thedisplacement ξ‖,
DAξ⊥ = ∇⊥
(δB‖
B0
),(40)
with the parallel component of the perturbed magnetic field given, from eq. (26), by
δB‖
B0= ∇ · ξ⊥ .(41)

10 G. VLAD, F. ZONCA and S. BRIGUGLIO
Furthermore, the local shear Alfven operator DA is expressed by
DA ≡ ω2
v2A
+∂2
∂z2(42)
and ∇⊥ = eyiky + ex(∂/∂x). In the remainder of this section, we strictly follow ref. [49].For convenience, all perturbed fields f are assumed to be decomposed in the completeorthonormal set of shear Alfven eigenfunctions ψA`(z|x)
f(r, t) = e−i(ωt−kyy)∞∑
`=1
f`(x0, x1)ψA`(z|x1) ,(43)
where ψA`(z|x) satisfies the differential equation[∂2
∂z2+ω2A`(x)
v2A
]ψA`(z|x) = 0,(44)
along with boundary conditions ψA` = 0 at z = 0 and L, and ω2A`(x) defines the local
shear Alfven eigenfrequency. Note that in eq. (43), the existence of continuous frequencyspectra, with a corresponding singular eigenfunction behaviour, has been explicitly takeninto account by introducing “fast” x0 (singular) and “slow” x1 (equilibrium) radial vari-ables. Using the following definition of the internal product
〈ψA`|ψA`′〉 ≡∫ ∞
0
v2AψA`ψA`′dz = δ`,`′ ,(45)
it is straightforwardly demonstrated that, in the present case,
ψA`(z|x) = (2/Lv2A)1/2 sin k`z ,(46)
with k` = `π/L and ω2A`(x) = k2
` v2A(x).
We now exploit the existence of two spatial scales (x0 and x1) and solve eqs. (40)
and (41) via asymptotic expansions of the fluctuating fields f` = f(0)` + f
(1)` + . . ., where
|f (1)` /f
(0)` | ≈ |∂x1
/∂x0| etc. With the definition of eq. (43) and considering that |DA| k2
y
for a typical shear Alfven wave (i.e., k2‖ k2
y), eqs. (40) and (41) may be combined andyield, to the lowest order,
[∂
∂x0εA`
∂
∂x0− k2
yεA`
]ξ(0)x` = 0 ,(47)
where εA` = ω2 − ω2A`(x). Equation (47) has solutions which become singular at the
radial positions xR` where the “local dispersion relation”, εA` = 0 (ω2 = ω2A`(xR`)), is
satisfied; i.e., at those positions where the shear Alfven continuous spectrum is resonantlyexcited. A natural definition of the “fast” (singular) variable is x0 ≡ x − xR`, sinceεA` = ε′A`(x1)x0. In this way, it is readily shown that eq. (47) has solutions that may bewritten in the form
ξ(0)x` =
C`(x1)
ε′A`(x1)ln (x0) .(48)
Meanwhile, eqs. (40) and (41) can be used to demonstrate that, at the lowest order,
∇ · ξ(0)⊥` = 0, from which we get
ξ(0)y` =
i
ky∂x0
ξ(0)x` =
iC`(x1)
kyε′A`(x1)
1
x0.(49)

DYNAMICS OF ALFVEN WAVES IN TOKAMAKS 11
Using eq. (49) along with the y component of eq. (40), it is possible to show that the com-pressional component of the magnetic field perturbation is given in the form of eq. (43),i.e.,
δB‖ = e−i(ωt−kyy)∞∑
`=1
b‖`(x1)ψA`(z|x1) ,(50)
with the important difference that, here, b‖` are functions of the “slow” (equilibrium)
radial variable x1 only. More specifically, it is readily demonstrated that b‖` is directlyrelated to the functions C`(x1) introduced above:
b‖`(x1)
B0=
ε′A`(x1)x0
ikyv2A(x1)
ξ(0)y` =
C`(x1)
k2yv
2A(x1)
.(51)
It is important to recognize the fundamental meaning of eqs. (48), (49) and (51): ina non-uniform plasma, shear and compressional Alfven waves are coupled together andtheir coupling is the origin of the singular solutions corresponding to the “local” shearAlfven oscillations of the continuous spectrum ω2 = ω2
A`(x). In fact, as discussed insect. 2
.1, the group velocity of shear Alfven waves is directed along the magnetic field
lines (z-direction in the present case), whereas the compressional wave generally carriesenergy across the field itself. Thus, the latter one “piles up” wave energy at the radiallocation where the shear Alfven spectrum is resonantly excited, explaining the origin of“local singular oscillations” [49].
Resonant excitation allows us to introduce the concept of resonant absorption [48]of shear Alfven waves. In fact, a finite amount of wave energy can be absorbed at theresonant layer, xR`. To see this, we start from the fact that the time-averaged energyabsorption rate, d〈W 〉/dt, is given by the Poynting energy flux into the infinitely narrowlayer at xR`. Thus [48],
d〈W 〉dt
= −cLy8π
Re
∫ L
0
dz
∫ ∞
−∞
∇ ·[(
iω
cξ × B0
)× δB∗
]dx
,(52)
where Ly is the system extension in the y-direction. Using the definitions of eqs. (45)and (46) along with boundary conditions at z = 0 and z = L, eq. (52) becomes
d〈W 〉dt
= −B0Ly8π
Re
∞∑
`=1
∫ ∞
−∞
∂
∂x
(− iω
v2A
ξx`b‖∗
`
)dx
.(53)
The right hand side (r.h.s.) of eq. (53) does not vanish only for the contribution to theintegral at the resonant surface xR`. Here, using the causality constraint Imω → 0(+),
it is possible to demonstrate that ξ(0)x` (cf. eq. (48)) has a jump given by
∆ξ(0)x` = −iπ sgn
(ω
ε′A`(xR`)
)C`(xR`)
ε′A`(xR`).
Thus, recalling eq. (51), eq. (53) finally becomes [49]
d〈W 〉dt
=Ly|ωA`(xR`)|8|ε′A`(xR`)|
k2y
∞∑
`=1
∣∣∣b‖`(xR`)∣∣∣2
.(54)

12 G. VLAD, F. ZONCA and S. BRIGUGLIO
The existence of the resonant energy absorption mechanism becomes evident alsowhen one analyzes the time asymptotic response of the system to initial perturbations.From the previous discussion, it can be conjectured that, as ωA`t → ∞, one essentiallyhas |∂x| |ky| and, thus, that the relevant equation which describes the time asymptoticresponse is (cf. eq. (47)):
∂
∂x
[∂2
∂t2+ ω2
A`(x)
]∂
∂xξx`(x, t) = 0 .(55)
Equation (55) can be straightforwardly integrated once and it yields
∂
∂xξx`(x, t) = C`(x)e
±iωA`(x)t ,
where C`(x) is a function depending on equilibrium non-uniformities. Now, note that,as ωA`t→ ∞,
∂x ∼= ±iω′A`(x)t(56)
and, thus,
ξx`(x, t) = ∓iC`(x)
ω′A`(x)t
e±iωA`(x)t .(57)
Meanwhile, noting eq. (49), one readily derives
ξy`(x, t) =i
kyC`(x)e
±iωA`(x)t .(58)
Equations (57) and (58) give us further insight in the dynamics associated with theresonant excitation of the shear Alfven continuum and resonant wave absorption: theξx` component exhibits the characteristic (1/t) decay via phase mixing of the continuous
spectrum, whereas ξy` shows undamped oscillations at frequencies corresponding to theshear Alfven continuum. This peculiar feature will be analyzed in detail in sect. 2
.4,
where numerical computations are presented, focusing on the resonant excitation of thecontinuous spectrum. Furthermore, eq. (56) suggests that the radial wave-vector is
|kx| ∼= |ω′A`(x)t|
and, thus, |kx| → ∞ as t → ∞, in agreement with eq. (48) and with the fact that thewave function becomes singular in the asymptotic time limit.
The wave function singularity that emerges in the asymptotic time limit is a clearindication of the break down of the ideal MHD model, which fails when very short scaleperturbations are excited. Typically, the most relevant new (with respect to the idealMHD model) dynamics that appear on short scales are associated with charge separation,i.e., with the finite parallel electric field fluctuations (δE‖) due to, e.g., finite ion Larmorradius (ρi), small but finite electron inertia and finite plasma resistivity. In the presenceof finite δE‖, additional effects are to be expected also from wave-particle interactions,which yield collisionless wave dissipation known as Landau damping. Incorporating such“kinetic” effects essentially allows finite energy propagation across the resonant surfacesx = xR`. Thus, we may expect that wave energy can no longer “pile up” at these radiallocations and that, as a consequence, all wave-function singularities are removed on shortscales. Here, we limit our discussion to the case in which me/mi βe 1 (with βe

DYNAMICS OF ALFVEN WAVES IN TOKAMAKS 13
being the ratio between the electron kinetic and magnetic pressures), i.e., the electronthermal speed is much larger that the Alfven velocity. Furthermore, for the sake ofsimplicity, we also assume (k2
x + k2y)ρ
2i ≡ k2
⊥ρ2i 1. It is then possible to show that
eq. (47) becomes [48, 49][4ω2∇2
⊥ρ2K∇2
⊥ + ∇⊥ · εA`∇⊥
]ξx` = 0 ,(59)
where
ρ2K =
1
4
[3
4(1 − iδi) +
TeTi
(1 − iδe)
]ρ2i − i
c2η
16πω.(60)
Here, δi and δe indicate, respectively, ion and electron Landau damping contributions,whereas the term proportional to η is due to finite plasma resistivity (cf. eq. (10)). Ineq. (59), the singularity at εA` = 0 is clearly removed by the term including the 4-th orderderivative, which is also proportional to ρ2
K 1, indicating the formation of a boundarylayer around the shear Alfven resonant surface. In fact, eq. (59) describes the mode-conversion of a long wavelength MHD mode (the shear Alfven wave) to a short wavelengthkinetic mode: the Kinetic Alfven Wave (KAW) [8, 48, 50, 51]. The rate at which KAW’sare excited is exactly that of eq. (54). Thus, the resonant energy absorption rate of shearAlfven waves may be interpreted as a power transfer to short wavelength modes, which,eventually, may be absorbed by the background plasma. Note, however, that resonantabsorption of the MHD wave and KAW dissipation are mutually independent processes.Indeed, eq. (54) itself is independent on the details of the dissipation mechanism.
The WKB local dispersion relation of KAW’s is
ω2 =(1 + 4k2
⊥ρ2K
)ω2A` .(61)
Equation (61) indicates that KAW’s are propagating for εA` > 0 and become cut-off forεA` < 0.
2.3. Waves in general non-uniform axisymmetric equilibria. – In the following, we
derive the governing equations for shear Alfven waves in general non-uniform plasmaequilibria, characterized by symmetry under rotations about a given axis, which we as-sume to be the z-axis. In this system, we take a as the typical scale-length perpendicularto the equilibrium magnetic field, and R0 as the characteristic parallel scale-length. Sucha choice is not a casual one, since it will allow us to naturally use it in the discussion oftoroidal plasma equilibria in later sections; it also yields no restrictions of validity of ouranalysis, since it is a quite general one, until a specific ordering of a with respect to R0
is not further assumed.In order to obtain the simplest, yet relevant, set of wave equations, we focus on high
wave-number modes. More specifically, we assume waves of the form ≈ exp(inϕ), with ϕbeing the trivial angular coordinate of the rotationally symmetric equilibrium, and n 1being the toroidal mode number. In such a way, perpendicular (to the magnetic field B0)wavelengths are typically λ⊥ ≈ a/n, whereas λ‖ ≈ R0 in order to minimize the stabilizinginfluence of magnetic field line bending. Recollecting the results of sections 2
.1 and 2
.2,
the present high-n assumption separates the typical time-scales of incompressible shearAlfven waves and of fast magnetosonic (compressional) waves. The n 1 assumptionwill be maintained throughout this section, unless otherwise explicitly stated.
The governing equations for shear Alfven waves can be derived from the quasi-neutrality condition ∇ · δJ = 0; i.e.,
∇ · δJ⊥ + B0 · ∇(δJ‖
B0
)= 0 ,(62)

14 G. VLAD, F. ZONCA and S. BRIGUGLIO
where δ J is the perturbed current. The expression for δJ‖ is given by the parallelAmpere’s law
4πδJ‖ = cb · ∇ × (∇× δA) ,
δA being the perturbed vector potential, and b ≡ B0/B0. Thus, in the present axisym-metric equilibrium,
δJ‖ = − c
4π∇2
⊥ δA‖
(1 +O
(a
nR0
)).(63)
Furthermore, δA‖ can be expressed in terms of the scalar potential perturbation δφ viathe parallel Ohm’s law δE‖ = 0 (see eq. (4)); i.e.,
−b · ∇δφ + iω
cδA‖ = 0 .
Note that time dependence of the form ≈ exp(−iωt) has been assumed here.The perpendicular current perturbation is obtained from the perpendicular force
balance (cf. eq. (2)); i.e.,
δJ⊥ = −iωc
B20
B0 × %0δv⊥ +c
B20
B0 ×∇δP +
J0‖
B0δB⊥ − δB‖
B0
c
B20
B0 ×∇P0 .(64)
Here, P0 is the equilibrium pressure and β ≡ 8πP0/B20 1. In eq. (64), the perpendicular
velocity δv⊥, meanwhile, is given by the Ohm’s law
B0 × δv⊥ = −c∇⊥ δφ ;(65)
and the pressure perturbation δP by the equation of state, eq. (9),
−iω δP + δv⊥ · ∇P0 ' 0 ,(66)
corresponding to an incompressible plasma behaviour. Equation (66) gives
δP =c
iω
B0 ×∇⊥δφ
B20
· ∇P0 '(ck⊥ωB0
)∂P0
∂rδφ ,(67)
where r is a radial coordinate, orthogonal to the local magnetic flux surface. Fromeq. (64), we then find
(1 +O
(1
n
))∇ · δJ⊥ = i∇ ·
[c2
B20
%0ω∇⊥δφ
]− 2cκ × B0
B20
· ∇⊥δP −
cB0 ×∇P0
B40
· ∇⊥
(4πδP +B0δB‖
),
where κ ≡ b · ∇b is the magnetic field curvature.For n 1, the fluctuations are localized in the radial direction, i.e., their typical
width is much smaller than a, the perpendicular scale-length of the system. Moreoverthe modes considered here are characterized by the shear Alfven time scale, which is

DYNAMICS OF ALFVEN WAVES IN TOKAMAKS 15
much longer (an order O(nR0/a)) than that of the compressional Alfven wave. As aconsequence, the plasma behaves as an incompressible fluid, and
4πδP +B0δB‖ = 0(68)
to the lowest order in n, which expresses the perpendicular pressure balance. Incidentally,we note that the decoupling from the compressional wave, at the lowest order in the high-n limit, is only one of the reasons that cause this case to be one of particular relevance.In fact, as it will be shown in the following, shear Alfven waves may be driven unstableby their resonant interaction with MeV ions, which are present in the plasma, e.g., asfusion products.
The high-n assumption, along with eq. (68), allows us to further simplify the ex-pression of ∇· δJ⊥. Combining eqs. (63) through (68), eq. (62) can be cast into the formof the following vorticity equation
B0b · ∇[
1
B0∇2
⊥ b · ∇ δ φ
]+∇ ·
[4π%0
B20
ω2 ∇⊥ δ φ
]−
−8 πκ × B0
B20
· ∇⊥
[(B0 ×∇P0
B20
)· ∇⊥ δφ
]= 0 .(69)
Equation (69) is the general equation governing high-n shear Alfven waves in low-β,non-uniform, axisymmetric plasma equilibria. Applied to different plasma configurationsand geometries, it will be the starting point of our analyses of the general properties ofshear Alfven wave spectra.
2.4. Waves in a cylinder. – The simplest plasma equilibrium (with cylindrical sym-
metry) we analyze, with the help of eq. (69), is a pressureless (P = 0) screw pinch.A screw pinch of length 2πR0 is characterized by an equilibrium magnetic field B0 ≡(0, B0ϑ(r), B0z(r)), where (r, ϑ, z) is a cylindrical coordinate system. Shear Alfven wavesin such a plasma equilibrium (which is a 1-D equilibrium as a sheared slab) are char-acterized by a continuous spectrum ω2 = k2
‖(r)v2A(r). The only new feature introduced
when considering a screw pinch is the presence of finite magnetic field curvature. If weassume to have a shear Alfven oscillation of the scalar potential δφ(r, ϑ, z, t) of the form
δφ(r, ϑ, z, t) = ei(nz/R0−mϑ)δφm,n(r, t) ,(70)
equation (69) becomes, for δφm,n(r, t),
1
r2∂
∂r
[r3(n− m
q(r)
)2
+ r3R2
0
v2A
∂2
∂t2
]∂
∂r
(δφm,n(r, t)
r
)=
m2 − 1
r2
[(n− m
q(r)
)2
+R2
0
v2A
∂2
∂t2
]δφm,n(r, t) −
(∂
∂r
R20
v2A
)∂2
∂t2
(δφm,n(r, t)
r
),(71)
with q(r) = rB0z(r)/(R0B0ϑ(r)) playing the role of the so-called safety factor in a toka-mak, and m and n that of the poloidal and toroidal mode number respectively. Equa-tion (71) is the continuity (or quasi-neutrality) equation ∇ · δJ = 0, the terms ≈ ∂2/∂t2

16 G. VLAD, F. ZONCA and S. BRIGUGLIO
coming from the divergence of the perpendicular polarization current, and the othersfrom the divergence of the parallel current. Then eq. (71), solved as an initial valueproblem [52, 53], gives
δφm,n (r, t) ' 1
te−iωA(r)t(72)
for the time asymptotic behaviour of δφm,n (r, t), where
ω2A (r) =
v2A
R20
(n− m
q (r)
)2
.(73)
If we identify k‖ (r) ≡ (n−m/q(r)) /R0, the nature of the continuous shear Alfvenspectrum in a screw pinch is clear. Shear Alfven waves, in fact, consist of “local” plasmaoscillations, with frequency ω2(r) = ω2
A(r) satisfying eq. (73) and continuously changingthroughout the plasma column. For the shear Alfven continuous spectrum in a screwpinch the same considerations hold, which were made for a sheared slab in sect. 2
.2.
The validity of eqs. (72) and (73) is general and it is not limited by the high-nassumption made in deriving eqs. (69) and (71). In fact, exploiting the local nature ofcontinuum plasma oscillations, eq. (71) reduces to
1
r2∂
∂r
[r3(n− m
q(r)
)2
+ r3R2
0
v2A
∂2
∂t2
]∂
∂r
(δφm,n(r, t)
r
)= 0 ,(74)
which holds for arbitrary (m,n) in the boundary layer where the continuous spectrumis excited. Such general validity is confirmed by the results of numerical simulations ofthe time asymptotic behaviour of a radially extended initial perturbation of the low-nAlfven continuum in a cylindrical configuration. We make use of the initial-value versionof the MARS code (see appendix sect. 5
.2), and choose an equilibrium configuration
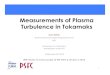
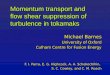
with the safety factor q ranging from q = 1.1 in the centre to q = 1.85 at the edge of theplasma column and a flat plasma-density radial profile. This equilibrium corresponds toan Alfven continuum, for a mode perturbation with poloidal and toroidal mode numbers(m,n) = (1, 1), ranging from ω/ωA ' 0.1 in the centre to ω/ωA ' 0.45 at the edge ofthe plasma (here we define ωA ≡ vA/R0). The assigned initial perturbation is shown infig. 1, and consists of a radially extended velocity perturbation (here s ≡ (V (ψ)/Vtot)
1/2,see appendix sect. 5
.2). As already shown in sect. 2
.2, we expect the radial component of
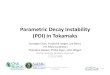
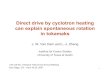
this perturbation to oscillate at the local Alfven frequency, with the amplitude decayingasymptotically in time as ∝ 1/t, whereas the poloidal component asymptotically oscillateswith constant amplitude. In fig. 2 the time dependence of the radial component of theperturbed velocity is shown, at a fixed value of the radial coordinate. The poloidalcomponent of the perturbed velocity is shown in fig. 3. To better illustrate the phasemixing phenomenon, we also show in figs. 4 the profile of the perturbed radial velocityat several times. The initially smoothed and extended perturbation changes in time andbecomes more and more jagged, loosing phase correlation. In fact, each fluid elementoscillates at the local Alfven frequency, loosing coherence with the motion of adjacentelements. This fact qualitatively explains the reason of the name “phase mixing”, whichindicates this phenomenon. A careful analysis of the time behaviour of the velocityperturbation at a fixed value of the radial coordinate (e.g., making its Fourier transformin time) shows that a global oscillation exists, which is present at all the values of theradial coordinate and is superimposed to the local Alfven frequency (see fig. 5). These“global” modes are, generally speaking, potentially dangerous if they are driven unstable,

DYNAMICS OF ALFVEN WAVES IN TOKAMAKS 17
0.00
0.05
0.10
0.15
0.20
0.25
0.0 0.2 0.4 0.6 0.8 1.0
s
ωA t=0v
1,1
s
Fig. 1. – Initial perturbation of the contravariant radial component of the perturbed velocity,vs1,1.
-0.08
-0.04
0.00
0.04
0.08
0 200 400 600 800 1000
ωA t
v1,1
s
Fig. 2. – Time dependence of the contravariant radial component of the perturbed velocity, vs1,1,
at s = 0.2. Also the envelope of the curve decaying as ∝ 1/t is shown.

18 G. VLAD, F. ZONCA and S. BRIGUGLIO
-0.3
-0.2
-0.1
0.0
0.1
0.2
0.3
0 200 400 600 800 1000
ωA t
v1,1
χ
Fig. 3. – Time dependence of the contravariant poloidal component of the perturbed velocity,vχ1,1, at s = 0.2.
because they may affect large regions of the plasma and eventually yield confinementdegradation for both particles and energy. The global mode observed in the frequencyspectrum of fig. 5 is characterized by a purely real frequency, which lies just above theAlfven continuum, and by a perturbed radial velocity almost uniform over the wholeplasma cross section.
As a further example, it is instructive to analyze a cylindrical configuration witha plasma density decreasing with radius, as generally encountered in confined plasmaequilibria. Here, we assume %0(s) = %0(0)(1 − s4)3. Moreover, a perturbation with(m,n) = (2, 1) is considered. In fig. 6 the corresponding Alfven continuum is shown. Ithas to be noted that the Alfven continuum frequency increases toward the edge of theplasma because of the corresponding density decrease. In fig. 6, a line corresponding toa Global Alfven Eigenmode (GAE) is also shown, whose corresponding radial-velocityeigenfunction is reported in fig. 7. Several global Alfven eigenmodes are in fact presentwith frequencies just below the continuous spectrum, which correspond to eigenfunctionswith different radial nodes.
Some insight in these global modes can be obtained, following refs. [46, 47] andexpanding the quasi-neutrality equation, ∇ · δJ = 0, around an extremum, rext, of theAlfven spectrum (ω′
A(rext) = 0). Defining F (ω, r) ≡ ω2 − k2‖v
2A and E ≡ −cδφm,n/(B0r)
(the poloidal component of the electric field), for consistency of notation with refs. [46,47], the following differential equation for E is obtained
d
dr
(Fr
d
dr(rE)
)−m2FE − g(r)E = 0 ,(75)

DYNAMICS OF ALFVEN WAVES IN TOKAMAKS 19
0.00
0.05
0.10
0.15
0.20
0.25
0.0 0.2 0.4 0.6 0.8 1.0
s
ωA t=0v
1,1
s
-0.06
-0.05
-0.04
-0.03
-0.02
-0.01
0.00
0.0 0.2 0.4 0.6 0.8 1.0
s
ωA t=10
v1,1
s
-0.03
-0.02
-0.01
0.00
0.01
0.02
0.0 0.2 0.4 0.6 0.8 1.0
s
ωA t=100
v1,1
s
-0.004
-0.002
0.000
0.002
0.004
0.006
0.0 0.2 0.4 0.6 0.8 1.0
s
ωA t=1000
v1,1
s
Fig. 4. – Radial profile of the contravariant radial component of the perturbed velocity, vs1,1, at
several times.
s=0.35
s(ω ) (a.u.)v
s=0.17
s(ω ) (a.u.)v
s=0.55
s(ω ) (a.u.)v
s=0.75
s(ω ) (a.u.)v0
0.1
0.2
0.3
0.4
0.5
0.0 0.2 0.4 0.6 0.8 1.0
ω /ωA
s
0
0.1
0.2
0.3
0.4
0.5
ω /ωA
1,1 1,1 1,1 1,1
Fig. 5. – Alfven frequency spectrum of the contravariant radial component of the perturbedvelocity, vs
1,1, at several radial positions.

20 G. VLAD, F. ZONCA and S. BRIGUGLIO
0.0
0.2
0.4
0.6
0.8
1.0
1.2
0.0 0.2 0.4 0.6 0.8 1.0
ω /ωA
s
GAE
Fig. 6. – Alfven frequency spectrum for %0(s) = %0(0)(1 − s4)3. A perturbation with (m, n) =(2, 1) is considered. Also a Global Alfven Eigenmode (GAE) is shown (dashed line).
-0.06
-0.05
-0.04
-0.03
-0.02
-0.01
0.00
0.0 0.2 0.4 0.6 0.8 1.0
s
v2,1
s
Fig. 7. – Radial profile of the contravariant radial component of the perturbed velocity, vs2,1, for
the GAE mode shown in fig. 6.

DYNAMICS OF ALFVEN WAVES IN TOKAMAKS 21
where g(r) is given by [46, 47]
g(r) = v2A(rext)
[rk‖
d
dr
(rdk‖
dr
)− mrk‖
B0
d
dr∇2
⊥ψeq0,0
],(76)
and ψeq0,0 is the equilibrium poloidal magnetic field flux function (see appendix sect. 5.1).
Equation (75) is valid for arbitrary (m,n) and, thus, cannot be directly derived fromeq. (69). Indeed, the term g(r) represents the effect of the equilibrium current, which isnegligible (O(1/n)) in the high-n limit.
Upon expanding F around rext,
F = ω2 − ω2A ' ω2 − (ω2
A(rext) +1
2ω2A′′(rext)x
2) =ω2A(rext)
L2(∆
2 − x2) ,(77)
with x ≡ (r − rext), ∆2
= L2[ω2 − ω2A(rext)]/ω
2A(rext) and L2 ≡ 2ω2
A(rext)/ω2A′′(rext).
Substituting the last expression into eq. (75) and evaluating all the other quantities atr = rext, we obtain
d
dy(y2 − 1)
dE
dy− ∆(y2 − 1)E + g0E = 0 .(78)
Here y = x/∆ and g0 = g(rext), whereas ∆ = ∆2(m/rext)
2 represents the eigenvalue ofthe problem.
Analyzing eq. (78) in Fourier space, a Schrodinger like equation can be obtained
d2Ψ
dz2+ [∆ − V (z)]Ψ = 0 ,(79)
where Ψ(z) = (1 + z2)1/2E(z∆1/2), and
E(p) =1
(2π)1/2
∫ ∞
−∞
dy e−ipyE(y) .
The effective potential V (z) is given by
V (z) = − g01 + z2
+1
(1 + z2)2.(80)
For g0 ≤ 0 (see fig. 8), the potential V (z) has a maximum at z = 0. Thus no localizedmodes can exist for any value of ∆ and only continuum modes are present (we remindthat the mode equation in the Fourier conjugate space is being analyzed, and that modeslocalized in such space correspond to extended (global) modes in the real space andvice versa). For g0 ≥ 2, V (z) has a minimum at z = 0, is negative everywhere andapproaches zero as z−2 as z → ±∞. Thus ∆ − V (z) = 0 has real solutions only for∆ < 0, corresponding to bound states. These modes are localized in the narrow potentialwell around z = 0. Thus in real space they are broad and represent the discrete GAEspectrum. For 0 < g0 < 2 the potential V (z) has two minima; again it can be shown [54]that bound states (GAE’s) can exist only for ∆ < 0. Taking into account that, for thecase shown in fig. 6, g0 ≈ 0.4, the existence of a GAE in that case can be justified on thebasis of the previous analysis.

22 G. VLAD, F. ZONCA and S. BRIGUGLIO
-1.0
-0.5
0.0
0.5
1.0
1.5
2.0
-6.0 -4.0 -2.0 0.0 2.0 4.0 6.0
V(z)
z
g0=-1
0.4
1.0
2.0
Fig. 8. – Potential profile for different values of g0.
In the presence of non-ideal terms, as, e.g., resistivity or finite Larmor radius effects,the expression for V (z) in this simplified analysis, can be written as [46]
V (z) = − g01 + z2
+1
(1 + z2)2+ σ(1 + z2) ,(81)
where σ depends on the particular non-ideal effects considered. Thus for large values ofz, V (z) behaves like the potential of a simple harmonic oscillator implying bound statesfor all values of g0 (see fig. 9) and then, also, for positive values of ∆. This corresponds tothe fact that, beyond GAE’s, other discrete, closely spaced, localized modes (the KAW’s)exist, which, as shown in sect. 2
.2, replace the Alfven continuous spectrum.
The GAE’s are considered to be not so dangerous for tokamak plasmas because, ina two-dimensional (2-D) equilibrium, it can be shown that toroidicity generally acts onsuch modes as a stabilizing effect [55]. In fact, different poloidal harmonics are coupledtogether, as it will be shown in the following sections, and GAE’s very easily suffer theso-called continuum damping.
2.5. Waves in a torus: analytic theory. – In toroidal plasma equilibria, the situa-
tion discussed so far changes qualitatively. The poloidal-symmetry breaking due to thetoroidal field variation on a given magnetic flux surface causes different poloidal harmon-ics to be coupled. In contrast with the cylindrical case, m is no longer a good quantumnumber. As a consequence, at the intersection of the cylindrical continuous spectra oftwo neighbouring poloidal harmonics, say m and m + 1, the shear Alfven continuumbreaks up and a frequency gap appears [11] (cf. fig. 10). To demonstrate this, reconsider

DYNAMICS OF ALFVEN WAVES IN TOKAMAKS 23
0.0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0
-6.0 -4.0 -2.0 0.0 2.0 4.0 6.0
V(z)
z
σ = 0.1
σ = 0
Fig. 9. – Potential profile for σ = 0.1 and σ = 0, with g0 = −1.
eq. (71) as modified by toroidicity:
1
r2∂
∂r
[r3(n− m
q(r)
)2
+ r3R2
0
v2A
∂2
∂t2
]∂
∂r
(δφm,n(r, t)
r
)=
− ∂
∂rε0R2
0
v2A
∂2
∂t2∂
∂r
[δφm+1,n(r, t) + δφm−1,n(r, t)
]+
m2 − 1
r2
[(n− m
q(r)
)2
+R2
0
v2A
∂2
∂t2
]δφm,n(r, t) −
(∂
∂r
R20
v2A
)∂2
∂t2
(δφm,n(r, t)
r
),(82)
Equation (82) represents an infinite set of 1-D (in space) differential equations, whichdescribe shear Alfven waves coupled to (cut-off) compressional Alfven waves [48, 56] in a2-D (in space) toroidal equilibrium. Here, ε0 = O(ε) is the strength of the toroidal modecoupling in a toroidal equilibrium characterized by an inverse aspect ratio ε ≡ a/R0, witha and R0 the minor and major radius of the torus, respectively. Once fixed a frequencyω0, singular cylindrical poloidal harmonics δφm0,n and δφm0+1,n, with nq0 = m0 + 1/2,are excited at the radial position r0, such that v2
A0/(4q20R
20) = ω2
0 . Here vA0 ≡ vA(r0) andq0 ≡ q(r0). These components are thus the dominant ones near the considered surfaceand are described by the following coupled equations
∂
∂ δq
[δω
2ω0−(
1 − 1
2m0 + 1
)nδq
]∂
∂ δqδφm0,n = − ε0
4
∂2
∂ δq2δφm0+1,n ,

24 G. VLAD, F. ZONCA and S. BRIGUGLIO
1.50.5-0.5
0
1
gap
ω
nq-m
ωo
+
-
ω
ω
4
2
2
2
2
Fig. 10. – Continuous spectra for the (m, n) (circles) and (m + 1, n) (crosses) cylindrical shearAlfven modes. When toroidicity effects are included, a frequency gap appears in the shearAlfven continuum. Here nq − m, rather than r, has been used as a radial variable.
∂
∂ δq
[δω
2ω0+
(1 +
1
2m0 + 1
)nδq
]∂
∂ δqδφm0+1,n = − ε0
4
∂2
∂ δq2δφm0,n ,(83)
which correspond to eq. (82) Fourier transformed (in time) and then linearized in δq =
q−q0 and δω = ω−ω0. Note that the Fourier transform (in time) of δφm0,n and δφm0+1,n
have been indicated with the same symbols for a simpler notation.Equations (83) can be integrated once and give
D(δω, nδq)∂
∂ δqδφm0,n = B
[δω
2ω0+
(1 +
1
2m0 + 1
)nδq
]− ε0
4C ,
D(δω, nδq)∂
∂ δqδφm0+1,n = C
[δω
2ω0−(
1 − 1
2m0 + 1
)nδq
]− ε0
4B ,(84)
with
D(δω, nδq) = − ε2016
+
[δω
2ω0−(
1 − 1
2m0 + 1
)nδq
]×
[δω
2ω0+
(1 +
1
2m0 + 1
)nδq
].(85)
Here B and C are integration constants. In the ε0 → 0 cylindrical limit, eqs. (84) give
δφm0,n singular atδω = 2ω0nδq [1 − 1/(2m0 + 1)] ,

DYNAMICS OF ALFVEN WAVES IN TOKAMAKS 25
while the singularity in δφm0+1,n occurs at
δω = −2ω0nδq [1 + 1/(2m0 + 1)] .
Thus, the local expression for the cylindrical shear Alfven continuous spectrum is ob-tained.
When toroidicity is included (ε0 6= 0), both δφm0,n and δφm0+1,n are singular at
D(δω, nδq) = 0 ,
i.e.,
(86)
n δq
(1 − 1
(2m0 + 1)2
)=
δω
2ω0(2m0 + 1)±√δω2
4ω20
− ε2016
(1 − 1
(2m0 + 1)2
).
If 4δω2 < ε20ω20
(1 − 1/(2m0 + 1)2
), eq. (86) has no real solutions. Thus, it describes the
formation of a frequency gap in the continuum, at the intersection of the m0 and m0 + 1cylindrical harmonics, as shown in fig. 10. The width of the gap is
δωw = ε0|ω0|√
1 − 1/(2m0 + 1)2 .(87)
Within this frequency window, discrete shear Alfven modes can exist, with normal-izable well behaved eigenfunctions, characteristic of a discrete spectrum [12, 13]. Thesemodes, known as Toroidal Alfven Eigenmodes (TAE’s), are bound eigenstates of thesystem. Very roughly speaking, they exist because, at the intersection of the cylindricalcontinua, two modes, m and m+ 1, are degenerate and propagate in opposite directionsalong the magnetic field (since k‖m+1,n = −k‖m,n). Their beating generates a stand-ing wave, which is further localized into a bound state by equilibrium inhomogeneities.Although the TAE poloidal harmonics are regular, the corresponding eigenfunctions arepeaked at the gap positions and have a typical width |nδq| ≈ ε0 (cf. fig. 11). The mech-anism of toroidal coupling can, however, couple many poloidal harmonics, making theradial extent of the TAE much broader. In the absence of radial equilibrium variationsof ωA/q, ωA = vA/R0 being the Alfven frequency, the spectrum sketched in fig. 11 wouldbe invariant under translations, and different poloidal harmonics would have the same(translated) shape. With equilibrium inhomogeneities, the TAE mode is further radiallylocalized into a bound state and only a finite number of poloidal harmonics are coupledto give the TAE eigenmode structure. The amplitude of the poloidal harmonics outsidethe localization region rapidly (exponentially) decays away from it (cf. fig. 12(a)). To besomewhat more specific, we note that the central gap frequency ω2
G = v2A/(4q
2R20) varies
with the radial position and a given TAE frequency is in the continuum forbidden win-dow over a limited radial interval (cf. fig. 12(b)), |nδq| ≈ nε0|q′LA|, LA being the scalelength of ω2
A/q2 = v2
A/(q2R2
0). This estimate also gives the typical number of coupledpoloidal harmonics which are in the gap region.
At surfaces where the TAE frequency coincides with the local shear Alfven contin-uum frequencies, the wave energy is resonantly absorbed [48, 56]. The mode is radiallybound by a local potential well within the gap and has to tunnel through regions in whichit decays in order to reach the continuous spectrum. Generally, the mode amplitude is,therefore, exponentially small at resonances and the wave absorption rate, proportional tothe amplitude squared, is correspondingly small. Therefore, the TAE mode is undamped

26 G. VLAD, F. ZONCA and S. BRIGUGLIO
nq-m
0.0
0.5
1.0
0.0
0.5
1.0
0.0
0.5
1.0
0.0
0.5
1.0
3.02.01.00.0-1.0-1
(b)
(c)
(d)
εoεo
εoεo
εoεo
δφ m,n
m+2,nδφ
m+1,nδφ
ω2
oω
24
ωTAE2
oω
24
(a)
^
^
^
Fig. 11. – (a) Gap formation and gap structure for the poloidal harmonics m, m +1 and m+ 2.The form of each eigenfunction is given; in (b) for δφm,n, in (c) for δφm+1,n and in (d) forδφm+2,n.

DYNAMICS OF ALFVEN WAVES IN TOKAMAKS 27
GAP
TAE width (a)
cont. cont.
n qδ
n qδ
ω2
ω 2o
4
ωTAE
2
ω 2o
4
(b)
δφ^
Fig. 12. – (a) TAE eigenmode structure. The gap region |nδq| ≈ nε0|q′LA| corresponds to
the spatial interval in which the TAE frequency is in the forbidden frequency window of thecontinuous spectrum. The amplitude of the poloidal harmonics outside the TAE localizationregion is exponentially small. (b) Resonant excitation of the shear Alfven continuum at theTAE frequency.

28 G. VLAD, F. ZONCA and S. BRIGUGLIO
to the lowest order and attracts a significant attention, since it may be driven linearlyunstable by energetic ions in the MeV range, which have typical velocities vH ≈ vA. Itis worthwhile to note that in this case the resonant wave absorption rate is proportionalto the square of the amplitude of the magnetic field compression as in refs. [48, 56], but,unlike there, in the case under examination, toroidal coupling broadens the TAE modewidth to a much larger extent than that of a single poloidal harmonic. Thus, it maybe expected that, in the toroidal case, the resonant absorption rate, due to non-localcoupling to the continuous spectrum, is larger than in the simpler cylindrical geometry.
In the case of TAE, resonantly excited by energetic particles, the high-n assumption,made – so far – for mere simplicity of the model, takes up a more profound physicalmotivation. These modes can tap free energy from the energetic-particle source via theparticle diamagnetic drifts ω∗PH
= kϑ[cTH/(eHB0)]|∇ lnP0H | ∝ m. In the following, itwill be shown that m ∼= nq; thus the energetic particle drive is expected to grow linearlywith n [20] until phase decorrelation of wave-particle resonances sets in at k⊥ρLH ≈krρLH ≈ 1, with ρLH the energetic-particle Larmor radius. Considering that kr ≈(1/∆rTAE) ≈ (nq′/ε0) (cf. fig. 11), we can infer that the most unstable TAE modenumber should be expected for nmax ≈ (1/q)ε0(a/ρLH). In present-day tokamaks, likeTFTR [3] and JET [2], nmax ≈ 1÷10, but in next-generation rector-relevant devices likeITER [1] a range of nmax ≈ 20 ÷ 60 is expected. For the high-n case is the physicallyrelevant one to analyze, thus, eq. (69) can be considered the starting point of all thequantitative studies of TAE waves reported in this section.
2.5.1. Two-Dimensional WKB analysis
From now on, we use a toroidal coordinate system (r, ϑ, ϕ) for the description of a toka-mak plasma equilibrium with major and minor radii respectively R0 and a (cf. fig. 13).More precisely, r is a radial-like flux variable, i.e., B0 ·∇r = 0, ϑ is the poloidal angle andϕ is the ignorable toroidal angle, on which the axisymmetric toroidal equilibrium doesnot depend. Details on the specific features of tokamak plasma equilibria and on theirnumerical computations are reported in appendix 5
.1. For the present discussion we sim-
ply ought to recall that a tokamak plasma is characterized by an equilibrium magneticfield which is essentially oriented in the ϕ direction; i.e., B0ϕ B0ϑ.
Typically, the most unstable shear Alfven waves have k‖ ≈ (1/R0) in order to min-
imize magnetic field line bending. Thus, we must have b · ∇δφ = O(1/R0)δφ. Formally,
we may write the b · ∇ operator as
b · ∇ = b · ∇ϕ[∂
∂ϕ+
B0 · ∇ϑB0 · ∇ϕ
∂
∂ϑ
],(88)
where, recalling that B0ϕ B0ϑ, b ·∇ϕ ∼= (1/R0). Meanwhile, the most general Fourierrepresentation we may use for δφ is, for a single n,
δφ(r, ϑ, ϕ, t) = ei(nϕ−ωt+nλ(r,ϑ))∑
m
e−imϑ δφm,n(r) ,(89)
where λ(r, ϑ) is a periodic function of ϑ, which is chosen such that b ·∇δφ = O(1/R0)δφ.Using eqs. (88) and (89), we have
e−i(nϕ−ωt+nλ(r,ϑ)−mϑ) b · ∇[ei(nϕ−ωt+nλ(r,ϑ)−mϑ)δ φm,n
]=
=i
R
[n−
(m− n
∂λ
∂ϑ
)B0 · ∇ϑB0 · ∇ϕ
]δ φm,n .(90)

DYNAMICS OF ALFVEN WAVES IN TOKAMAKS 29
0R a
ϑ
r
R
Z
ϕ
Fig. 13. – Toroidal coordinate system (r, ϑ, ϕ) for a tokamak plasma equilibrium with majorradius R0 and minor radius a.

30 G. VLAD, F. ZONCA and S. BRIGUGLIO
Therefore, a possible choice for λ(r, ϑ), which yields k‖ ≈ (1/R0) on a given magneticflux surface r, is given by
λ(r, ϑ) = −(
m
nq(r)
)(∫ ϑ
0
B0 · ∇ϕB0 · ∇ϑ
dϑ′ − q(r)ϑ
),(91)
with the safety factor q(r) defined as follows:
q(r) =1
2π
∮B0 · ∇ϕB0 · ∇ϑ
dϑ .(92)
Indeed, with the present choice for λ(r, ϑ), we have
e−i(nϕ−ωt+nλ(r,ϑ)−mϑ)b · ∇[ei(nϕ−ωt+nλ(r,ϑ)−mϑ)δ φm,n
]=
i
qR(nq −m) δ φm,n ,(93)
which yields k‖ ≈ (1/R0) for a mode with a radial localization, ∆(nq(r)), such that(nq − m) = O(1). Thus, in the present representation, we generally have nq ∼= mand a radial localization (for a single Fourier mode) ∆rm,n ≈ 1/(nq′), which implies(1/k⊥) ≈ 1/(nq′) to the lowest order in n (cf. fig. 11).
The high-n approximation allows us to assume that the 2-D TAE eigenmode struc-ture is characterized by two separate spatial scales (cf. fig. 11): a scale ≈ ∆rs ≡ 1/(nq′)describing the fast radial variation of each poloidal harmonic of the TAE wave function,and a scale LA ≈ a ∆rs accounting for slow equilibrium variations. This fact can beformally stated assuming that the poloidal harmonics δφm,n can be written in the form[37]
δφm,n(r) = Aj φ(j, ζ − j) ,(94)
where ζ ≡ nq −m0 is a newly defined radial (flux) variable, m0 is a “central” poloidalmode-number and the (ζ − j) variable contains the fast radial variation of the poloidaleigenfunctions, while the slow variation due to equilibrium inhomogeneities is describedby the slow scale of the discrete variable j ≡ m −m0. Note that, here, the concept ofm0 as a “central” poloidal mode-number is well-defined since (cf. fig. 12(b)) the numberof poloidal harmonics which are effectively coupled together to form the TAE eigenmodestructure is ∆m ≈ nε0 m ∼= m0. Using the two-scale argument further, we can rewriteeq. (94) as
δ φm,n (ζ) = A(ζ)φ(ζ, ζ − j) ,
where now ζ, rather than the discrete variable j, contains the slow variation due toequilibrium inhomogeneities. Moreover, if we further take the Fourier transform of thefunction φ(ζ, ζ − j) with respect to the fast variable (ζ − j), we get [37]
δφm,n = A(ζ)
∫ +∞
−∞
dθ e−i(ζ−j)θ Φ(ζ, θ) .(95)
Here, θ is the coordinate usually referred to as the extended poloidal angle in the theoryof ballooning modes [57].
The two radial scale-lengths are naturally separated in eq. (95), where θ ≈ 1 reflectsthe fast scale ≈ ∆rs = 1/(nq′), while the slow radial equilibrium variations are accountedfor by the ζ dependencies of the envelope A(ζ) and the form function Φ(ζ, θ). The Fourierrepresentation of eq. (89), thus, becomes
δφ(r, ϑ, ϕ, t) = ei(nϕ+nλ(r,ϑ)−m0ϑ−ωt)A(ζ)∑
j
e−ijϑ
∫ +∞
−∞
dθ e−i(ζ−j)θ Φ(ζ, θ) .(96)

DYNAMICS OF ALFVEN WAVES IN TOKAMAKS 31
This equation is still exact since the existence of two scale-lengths in the problem is takeninto account only when the WKB ansatz [36, 37]
A(ζ) ∝ exp
(i
∫ ζ
θk(ζ′)dζ′
)(97)
is explicitly made, along with the optimal ordering
|∂ζ ln θk(ζ)| ∼ |∂ζ ln Φ(ζ, θ)| ∼ (1/n) ,
expressing θk(ζ) and Φ(ζ, θ) slow dependencies on equilibrium profiles.In order to make further analytical progress in solving eq. (69), we limit our inves-
tigation to a toroidal plasma equilibrium with circular shifted magnetic flux surfaces.Such an equilibrium can be completely described by two local plasma parameters [57]:the magnetic shear s ≡ rq′/q and the dimensionless pressure gradient α ≡ −q2R0β
′ =−q2R0(8πP
′0/B
20). In this case the strength of the toroidal mode coupling ε0 takes the
explicit form ε0 ≡ 2(r0/R0 + ∆′), with ∆′ being the radial derivative of the so-calledShafranov shift ∆(r), defined in the appendix sect. 5
.5. Substituting eq. (96) along with
A(ζ) given by eq. (97) into eq. (69), we have
[∂
∂θ
(1 + I2
) ∂∂θ
+ Ω2(1 + I2
)(1 + 2ε0 cos θ) +
α (cos θ + I sin θ)
]Φ(ζ, θ) = 0 ,(98)
with
I = s
(θ − θk + i
∂
∂ζ
)− α sin θ .(99)
Here, the boundary conditions are Φ(ζ, θ) → 0 as |θ| → ∞. In eq. (99), ∂ζ acts on theslow variation of Φ(ζ, θ) and θk(ζ) only, the radial derivative on A(ζ) being taken careof by θk(ζ) itself. Furthermore, Ω2 ≡ q2ω2/ω2
A. Thus, eq. (98) is completely equivalentto eq. (69), but it is written in a form which may be exploited for a two-scale WKBasymptotic expansion, by formally assuming ∂ζ = O(1/nτT ), where either τT = 1/2 orτT = 1/3, as it will be shown shortly. Asymptotic expansions may be written for Φ(ζ, θ)and θk(ζ), i.e.,
Φ(ζ, θ) = Φ(0)(ζ, θ) + Φ(1)(ζ, θ) + . . . ,
θk(ζ) = θ(0)k (ζ) + θ
(1)k (ζ) + . . . ,
where θ(i)k = O[(1/ni)τT ], i = 0, 1, 2, . . .. In the lowest order, the equation for Φ(0)(ζ, θ)
will read as eq. (98) with I replaced by I0, where
I0 = s(θ − θ
(0)k
)− α sin θ .(100)
The solution of the 1-D second order differential equation with homogeneous boundaryconditions, i.e., |Φ(0)(ζ, θ)| → 0 as |θ| → ∞, gives the local dispersion relation
F (θ(0)k ,Ω2, α, s) = 0 .(101)

32 G. VLAD, F. ZONCA and S. BRIGUGLIO
Hence, this first step exactly reproduces the well known results of ballooning theory [57].In eq. (101), the dependencies on Ω2, α and s have been indicated explicitly, since
through them the dependence of θ(0)k on ζ takes place. Equation (101) can be viewed as
the implicit form of the WKB trajectories in the (θ(0)k , ζ) plane, which determines θ
(0)k (ζ).
In the next order, it can be shown that
θ(1)k =
i
2
d
dζln
∂F
∂θ(0)k
;(102)
leading to the following WKB expression for A(ζ)
A(ζ) =const√∂F/∂θ
(0)k
exp i
∫ ζ
θ(0)k dζ′ .(103)
The WKB expression for the radial envelope becomes invalid close to the WKB
turning points, identified by the condition ∂F/∂θ(0)k = 0. So, close to a turning point,
we must recall the actual operator nature of I in eq. (99), and solve the correspondingcomplete problem
F
(−i
∂
∂ζ,Ω2, α, s
)A(ζ) = 0(104)
in order to connect WKB solutions of different validity regions. Locally, within a
small distance from the turning point position (θ(0)kT , ζT ), it is always possible to expand
eq. (104) as 1
2
∂2F
∂θ(0)2k
∣∣∣∣∣ζ=ζT
(−i
∂
∂ζ− θ
(0)kT
)2
+(F (θ
(0)kT ,Ω
2, ζ) − F (θ(0)kT ,Ω
2, ζT )) A(ζ) = 0 .(105)
Thus, recalling that ∂ζ = O(1/n) when acting on equilibrium quantities, it is readily
demonstrated that, generally, τT = 1/3, whereas τT = 1/2 if ∂ζF (θ(0)kT ,Ω
2, ζT ) = 0.In general, eq. (105) is exactly solvable in terms of special functions or classic poly-
nomials, depending on the order of the considered turning point. The connection ofWKB solutions for the radial envelope from different WKB validity regions, with bound-ary conditions |A(ζ)| → 0 as |ζ| → ∞, leads to the global dispersion relation for theundamped TAE modes, in the form of a corresponding quantization condition:
∮ζ(θ
(0)k |Ω2)dθ
(0)k = 2π(N + ν) ,(106)
where ζ(θ(0)k |Ω2) satisfies the local dispersion relation F (θ
(0)kT ,Ω
2, ζ) = 0. Furthermore,
N is the radial mode number, whereas ν = 1 for WKB ray oscillations in the (θ(0)kT , ζ)
phase space and ν = 0 for phase space rotations [36]. The detailed solutions of eq. (106)is beyond the scope of the present work. Here, we will refer to refs. [26, 36, 49, 58], whereeq. (106) is solved and discussed in great detail.
2.5.2. Gap formation and continuum damping
The lowest order eq. (98) can serve clarifying the existence of TAE modes as discrete(bound) eigenstates, well separated from the shear Alfven continuous spectrum. Con-
sider, for simplicity, the case α = 0, θ(0)k = 0. If we define Φ =
√1 + s2θ2Φ, eq. (98)

DYNAMICS OF ALFVEN WAVES IN TOKAMAKS 33
reduces to [∂2
∂θ2+ Ω2 (1 + 2ε0 cos θ) − s2
(1 + s2θ2)2
]Φ = 0 .(107)
In the large-θ limit, this is the Schrodinger equation of a free particle moving in asmall perturbing periodic potential. For ε0 = 0 the solutions would be just plane wavesΦ = exp(±ikθ) with k = Ω. The traveling waves can be reflected by the backgroundperturbation, but, in a 1-D periodic lattice of period L, they constructively combine instanding waves only when the Bragg reflection condition is met:
2L = lλ , λ ≡ 2π
k, l = 1, 2, 3, ... .(108)
In this case L = 2π. Then we must have k = Ω = l/2 for standing waves ≈ sin(lθ/2) and≈ cos(lθ/2) to form. For the two lowest energy states, the eigenfrequency is given by
sin
(θ
2
): Ω2 =
1
4−
⟨sin
(θ
2
) ∣∣∣∣ 2ε0Ω2 cos θ
∣∣∣∣sin(θ
2
)⟩
⟨sin
(θ
2
) ∣∣∣∣ sin
(θ
2
)⟩ =1
4(1 + ε0) ,
cos
(θ
2
): Ω2 =
1
4−
⟨cos
(θ
2
) ∣∣∣∣ 2ε0Ω2 cos θ
∣∣∣∣cos
(θ
2
)⟩
⟨cos
(θ
2
) ∣∣∣∣ cos
(θ
2
)⟩ =1
4(1 − ε0) ,(109)
with 〈f |g|f〉 = (1/4π)∫ 4π
0 dθfgf∗. It is not surprising that upper and lower edges of theshear Alfven continuous spectrum are found in this way. The ≈ sin(θ/2) and ≈ cos(θ/2)eigenfunctions are, however, not normalizable. In other words, they are still eigenstatesof the continuum. This draws a perfect analogy between Alfven waves in a toroidalplasma and wave packets of Bloch electrons in a 1-D crystal lattice. The role of magneticshear in eq. (107) is to create a ‘local’ potential well, which can transform TAE modesinto discrete modes, with well behaved normalizable eigenfunction. The potential well
is local because it varies with the radial position along with θ(0)k (ζ). It remains an
effective well throughout the continuum forbidden frequency window (cf. fig. 12) and,of course, stops to be such when unnormalizable(1) eigenfunctions are excited in thecontinuous spectrum. The typical radial TAE localization region corresponds to ζ values
such that the WKB phase trajectories θ(0)k (ζ) are given by the local dispersion relation
eq. (101), for purely real θ(0)k . Under normal circumstances, the localization region is
contained within the gap, and the mode exponentially decays before it resonantly excitesthe continuum. Thus, since any asymptotic expansion always neglects exponentiallysmall terms, eq. (106) does not generally include damping. Perturbation analyses, basedon energy conservation arguments, yield the following expression for TAE’s continuumdamping [37, 36, 38]:
γ
|ω| = − |1/nq′LA|3/24√
2ε0
Γ`(s, α) e−2|nq′LA|ε0T (s,α) +
Γu(s, α) e−2|nq′LA|ε0R(s,α).(110)
(1) Incidentally, it is worthwhile to note that unnormalizable eigenfunctions in the ballooning θ spacecorrespond to singular eigenfunctions in real space.

34 G. VLAD, F. ZONCA and S. BRIGUGLIO
Here, the functions Γ`(s, α) and Γu(s, α) represent, respectively, the absorption rate atthe lower and upper shear Alfven continuum. Meanwhile, T (s, α) and R(s, α) are the“tunneling” factors that describe the TAE wave cut-off while propagating towards thelower and upper continuum. All these functions have been calculated numerically forarbitrary values of (s, α) [36, 38].
The effect of pressure on the magnitude of continuum damping is important in thatit may cause the tunneling region towards the lower continuous spectrum to disappearif α exceeds a critical threshold αc(s) [36, 38, 59], such that T (s, αc(s)) = 0 [36, 38, 59],leading to a strong TAE coupling to the continuum and to a strong |γ/ω| = O(ε0)mode damping. In fact, it may be shown that the r.h.s. of eq. (110) diverges as α →αc(s) [36, 38], due to the break-down of the perturbative assumption which yields thatexpression. In the |s|, |α| 1 limit, the functions appearing in eq. (110) may be givenan analytical expression [36, 37, 38]
Γ`(s, α) ' 2−1/2|s|−1π−3/2[(1 − α)
2 − η2]−1/2
[arccosh
(1 − α
η
)]−3/2
,(111)
Γu(s, α) ' 2−1/2|s|−1π−3/2[(1 + α)
2 − η2]−1/2
[arccosh
(1 + α
η
)]−3/2
,(112)
T (s, α) ' s2π2
8arccosh
(1 − α
η
) [(1 − α)2 +
η2
2
],(113)
R(s, α) ' 2 arccosh
(α
η+
2
π|s|η
),(114)
with the definitions η = (1 + 1/|s|) exp(−1/|s|) and α = α (1 + s)/s2. From eq. (113), itfollows [36, 38, 59]
αc(s) =s2
1 + s
[1 − (1 + 1/|s|) e−1/|s|
].
Thus, as α→ αc(s),
γ
|ω| ≈ − 0.0057 ε0 (nq0ε0|s|)−3/2 s2(1 + |s|)(1 + s)2
e−1/|s|
(αc(s) − α)2
(r0LA
)3/2
,(115)
where r0 is the radial location of the high-n localized TAE mode. Equation (115) typicallygives |γ/(ε0ω)| ≈ 0.1 ÷ 1.
2.5.3. Excitation of kinetic TAE
As it was discussed in sect. 2.2, when the Alfven continuum is resonantly excited the
energy absorption at the resonant layer corresponds to mode conversion to KAW’s [48,56]. In this case, and similarly to what happens for a TAE, two degenerate kinetic wavescan form a standing wave: the Kinetic Toroidal Alfven Eigenmode (KTAE) [30]. Asalready discussed for eq. (59), kinetic effects modify eq. (98) into [49, 60]
[∂θ(1 + I2
0
)∂θ + Ω2
(1 + I2
0
)(1 + 2ε0 cos θ)+
α(cos θ + I0 sin θ) − 4Ω2(1 + I2
0
)s2(θ − θ
(0)k )2ρ2
K
]Φ(ζ, θ) = 0 ,(116)
where I0 is given by eq. (100) and ρ2K ≡ k2
ϑρ2K , with ρ2
K given by eq. (60). It maybe shown that, close to the accumulation points of the continuous spectrum (the gap

DYNAMICS OF ALFVEN WAVES IN TOKAMAKS 35
boundaries), the solution of eq. (116) may be written as
Φ(ζ, θ) =(1 + I2
0
)−1/2
[Ac(θ) cos
(θ + θ
(0)k
2
)+As(θ) sin
(θ + θ
(0)k
2
)],(117)
where θ ≡ θ − θ(0)k . Furthermore, Ac(θ) and As(θ) satisfy the coupled equations [49, 60]
dAc(θ)
dθ=
(Ω2 − 1
4+ ε0Ω
2 − s2ρ2K θ
2
)As(θ) ,
dAs(θ)
dθ= −
(Ω2 − 1
4− ε0Ω
2 − s2ρ2K θ
2
)Ac(θ) .(118)
Equation (118) is easily solved in proximity of lower and upper accumulation point ofthe shear Alfven continuum and it yields, respectively,
Ω2 =1 − ε0
4− i(2N + 1)
(2
ε0
)1/2
sρK ,
Ω2 =1 + ε0
4+ (2N + 1)
(2
ε0
)1/2
sρK ,(119)
where N is the radial mode number. The asymmetry between lower and upper KTAEspectra is due to the KAW dispersion relation, eq. (61), which predicts propagating wavesfor ω2 > ω2
Am (with ω2Am ≡ v2
A(n−m/q)2/R20 being the local shear Alfven frequency of
the m-th poloidal harmonic) and wave cut-off for ω2 < ω2Am. In the case of the upper
KTAE branch, the two degenerate KAW’s form a standing wave at the frequency-gapradial position, whereas, for the lower KTAE branch, KAW’s carry energy away fromthe mode localization region [30] (see fig. (14)). In fact, in the dissipationless limit,eq. (60) yields purely real ρK (δi = δe = η = 0) and eqs. (119) indicate that upperKTAE’s are undamped waves, while lower KTAE’s are affected by convective damping.The asymmetry between lower and upper KTAE spectra disappears when only the effectof finite plasma resistivity is considered in the definition of ρ2
K (ρi = 0): both the upperand lower branches are damped modes, located on straight lines in the complex frequencyplane, emerging at 45o from the upper and lower limits of the gap, respectively. Thiscase was originally investigated in ref. [12], where purely “resistive” KTAE were calledResistive Periodic Shear Alfven Eigenmodes (RPSAE’s).
2.5.4. Resonant excitation of gap modes
That shear Alfven wave may be driven unstable by resonant interactions with MeVenergetic ions was originally proposed in ref. [8]. This is due to the fact that, as statedbefore, for such particles the typical speed is vH ≈ vA and that the rate at which themode taps the free energy source associated with equilibrium pressure gradients, ω∗PH
,typically overcomes collisionless dissipation in velocity space (Landau damping ∝ ω),i.e., ω∗PH
> ω. On the contrary, both ions of the thermal plasma and electrons usuallyprovide mode damping, since ω∗Pi,e < ω.
Resonant excitations of both TAE and KTAE may be analyzed only via kinetic de-scription of energetic particle dynamics. It is possible to show that, with the contribution

36 G. VLAD, F. ZONCA and S. BRIGUGLIO
0.0
0.2
0.4
0.6
0.8
1.0
-0.2 0.0 0.2 0.4 0.6 0.8 1.0 1.2
ω (a.u.)
nq-m
propagating
cut-off
cut-offcut-off
propagating propagating
Fig. 14. – Sketch of propagating and cut-off regions of KAW’s.
of energetic ions, eq. (116) is modified into [26, 49, 60][∂θ(1 + I2
0
)∂θ + Ω2
(1 + I2
0
)(1 + 2ε0 cos θ) + α(cos θ + I0 sin θ)−
4Ω2(1 + I2
0
)s2(θ − θ
(0)k )2ρ2
K
]Φ(ζ, θ) =
4πωeHc2
q2R20
k2ϑ
〈ωdHδGH〉 ,(120)
where 〈. . .〉 =∫(. . .)d3v, ωdH = ΩdH(cos θ + I0 sin θ) is the magnetic drift frequency,
ΩdH = kϑ(v2⊥/2 + v2
‖)/(R0ΩH), ΩH = eHB0/(mHc) and δGH is the non-convectiveresponse of the energetic particle fluctuating distribution function δFH to the wave fields,i.e., δGH = δFH + (i/ω)(c/B0)(δE × b) · ∇FH0, with FH0 being the energetic particleequilibrium distribution function (cf. appendix 5
.5). In the limit k2
⊥ρ2LH 1 (with
ρLH ≡ vH/ΩH), the governing equation for δGH can be shown to be [20] (see eq. (204)of appendix 5
.5):
[ωt∂θ − i (ω − ωd)]H δGH = ieHmH
QFH0ωdHω
Φ ,(121)
where ωt = v‖/(qR) is the transit frequency and QFH0 = (2ω∂v2 + k × b/ΩH · ∇)FH0.Although eq. (120) has been derived in the high-n limit, it also holds for low-n modes in
the thin boundary layer at the gap region |θ| ≈ 1/ε0.Numerical investigations of TAE and KTAE resonant excitations by energetic ions
will be thoroughly reported in sect. 2.6.3. Analytical solutions of eq. (120), instead, have
been discussed in detail in refs. [26, 41, 49, 60]. Such detailed discussions are beyond thescope of the present work and, thus, we refer the interested reader to the cited literature.Here, we recall those results in some simple cases, considering circulating energetic ionsonly, i.e., particles which are never trapped between magnetic mirror points.

DYNAMICS OF ALFVEN WAVES IN TOKAMAKS 37
Two distinct scales determine the large |θ| behavior of the solution of eq. (120) in
the gap region: θ ≈ 1 and θ ≈ 1/ε0. It is then possible to show that Φ(ζ, θ) may be
written in the form of eq. (117) [12], where Ac(θ) and As(θ) satisfy the following coupledequations [61], i.e., an extension of eqs. (118):
d
dθAc =
(Γ− − β − s2ρ2
K θ2 − s2ρ2
KH θ2)As + sθδAc ,
d
dθAs = −
(Γ+ − β − s2ρ2
K θ2 − s2ρ2
KH θ2)Ac − sθδAs ,(122)
where Γ± = (Ω2 − 1/4) ± ε0Ω2 [20]. Assuming, for the sake of simplicity, the case of an
equilibrium distribution function FH0 symmetric in v‖, the following expressions can be
obtained for the constants β, δ and ρ2KH , containing the contribution of the energetic
particles:
β =2πq3
B20
R0
⟨mH
(v2⊥
2+ v2
‖
)2[
QFH0(v‖ − 2qR0ω
) +QFH0(
3v‖ − 2qR0ω)]⟩
,
δ = − 3πq3
B20
kϑω
⟨mH
ΩH
(v2⊥
2+ v2
‖
)3QFH0(
3v‖ − 2qR0ω)⟩
,(123)
ρ2KH = − πq5
2B20
k2ϑR0
⟨mH
Ω2H
1
v2‖
(v2⊥
2+ v2
‖
)4[
QFH0(v‖ − 2qR0ω
) − QFH0(5v‖ − 2qR0ω
)]⟩
.
The conditions for the excitation of TAE’s or KTAE’s can be easily seen fromeqs. (122) [60]. For toroidal equilibrium terms (Γ− and Γ+) sufficiently strong to domi-nate the kinetic terms, the “regular” MHD TAE mode prevails. This occurs as long as|s2(ρ2
K + ρ2KH)/(ε0Ω
2Γ2)| 1 and |sδ/(ε20Ω4)| 1, with Γ2 = −Γ−Γ+. A perturbativecalculation of the kinetic contribution to the TAE dispersion relation shows indeed that,for a TAE close to the bottom of the frequency gap (Γ+ ' 0 and Γ− ' −2ε0Ω
2, which isusually the case for the n = 1 and the high-n low shear modes),
Γ+ = β +s2
2
(1
Γ2+
1
2ε20Ω4
)(ρ2K + ρ2
KH) − sδ
4ε0Ω2+π2
8ε0Ω
2s2 ,(124)
with Γ2 ≈ (12 sπε0Ω
2)2. The growth rate γ (γ ≡ Imω) of the TAE is then given by
γ
ωA' ωA
2ω(1 + ε0)q2×
Im
[β + 4
(8
π2+ s2
)(1 + ε0ε0
)2
(ρ2K + ρ2
KH) − sδ
(1 + ε0ε0
)].
(125)
Equation (125) includes, in addition to the energetic-particle drive, the TAE dampingdue to a small kinetic-like perturbation superimposed on the regular MHD wave [30, 60].From eq. (123), it is possible to see that the finite energetic-particle drift-orbit size
(through the terms proportional to ρ2KH and δ, respectively) effectively decreases the
strength of energetic-particle drive because of resonance detuning.For sufficiently high energetic-particle pressures, the TAE downward real-frequency
shift – produced by energetic-particle compressibility – causes the TAE mode to be

38 G. VLAD, F. ZONCA and S. BRIGUGLIO
strongly coupled to the lower KTAE branch and damped because of kinetic convectionof energy away from the gap region. The criteria given above for exciting the TAE branchmay then be violated. In this case, analogously to what happens in the presence of otherdissipative effects (e.g., Landau damping), the KTAE branch is instead excited, usuallyclose to the upper shear Alfven continuum, Γ− ≈ 0 [60], since it is affected by a fairlysmall “radiative damping”. In this case, the upper KTAE’s dispersion relation becomes
Γ− = β +s
2ε0Ω2
√δ2 + 2ε0Ω2(ρ2
K + ρ2KH) − sδ
2ε0Ω2,(126)
or
γ
ωA' ωA
2ω(1 − ε0)q2×
Im
[β + 2s
(1 − ε0ε0
)√δ2 +
1
2
(ε0
1 − ε0
)(ρ2K + ρ2
KH) − 2sδ
(1 − ε0ε0
)].
(127)
Both equations (125) and (127) depend linearly on Im β, indicating, thus, that the growthrate of these modes is expected to increase linearly with the mode number for k⊥ρLH 1,as it was anticipated in the present section on the basis of qualitative considerations.
Note that eqs. (126) and (127) refer to the most unstable mode of the upper KTAEbranch, i.e., that corresponding to N = 0 in eq. (119). Furthermore, as already pointedout, eqs. (126) and (127) are obtained in the limit k2
⊥ρ2LH 1. For mode numbers such
that k2⊥ρ
2LH ' 1, the TAE dispersion relation is given by [41]
Υ(Ω) ≡(−Γ+
Γ−
)1/2
= δTf (s, α) + δTK ,(128)
where δTf(s, α) is associated with the thermal plasma (fluid) contribution to variationsin the potential energy, while δTK accounts for the analogous (kinetic) contribution dueto energetic particle dynamics, and is given by
δTK =π2
4|s|e2Hm2Hc
2
q2R20
k2ϑ
⟨Ω2dHQFH0
Ξ (1 + Ξ2)3/2
∑
`=1,3
ω
`2v2‖/(4q
2R20) − ω2
⟩,(129)
with Ξ2 = (k2ϑ/4)(ρ2
H + ρ2dH/2), with ρ2
H = v2⊥/Ω
2H and ρ2
dH = q2R20Ω
2dH/(k
2ϑv
2‖). Here,
recalling that ω ∼= vA/(2qR0) for the present modes, the resonant denominator eviden-tiates the fundamental wave-particle resonances at v‖ = vA and v‖ = vA/3 [20, 23, 27].Furthermore, previous results on the gap mode growth rates – increasing linearly withthe mode number for k2
⊥ρ2LH < 1 – and the functional dependence of δTK on Ξ2 ∝ k2
ϑρ2H
suggests that the most unstable modes are characterized by k2ϑρ
2LH
<∼ 1 and k2⊥ρ
2LH>∼ 1,
as discussed earlier in this section.In eq. (128) it is also possible to include the Landau damping contribution due to
thermal electron and ion magnetic drifts by simply replacing [26, 49] Ω2 → Ω2 − β1 inthe expression for Υ(Ω), where [20]
β1 =πq2
B20
⟨∑
j=e,i
∑
`=1,3
mj
(v2⊥
2+ v2
‖
)2ωQFj0
`2v2‖/(4q
2R20) − ω2
⟩.(130)

DYNAMICS OF ALFVEN WAVES IN TOKAMAKS 39
Equation (128) must satisfy the “causality constraint” ReΥ(Ω) > 0 [41, 62]. In thesimple limit |s|, |α| 1, for which [41] δTf(s, α) = (sπ/4)(1 − α/αc(s)), the causalityconstraint is α < αc(s) for sufficiently small energetic particle response, i.e., the conditionfor having a TAE well inside the frequency gap in the continuous spectrum. This is thetypical case of a TAE mode driven unstable by an energetic particle population, whichmay be considered as a perturbation to the thermal plasma. Clearly, this is no longer thecase when δTK ≈ δTf (s, α) in eq. (128). In fact, shear Alfven wave can still be excitedfor α > αc(s), provided that the energetic particle drive is sufficiently strong to overcome“continuum damping”, ΥC(Ω) ≡ (−Υ(Ω)2)1/2 [26, 41, 49, 62]. More precisely, close tomarginal stability, these modes have ω = ωr + iγ, with
Re δTK(ωr) +sπ
4
(1 − α
αc(s)
)= 0 ,
γ
ωr= − Im δTK(ωr) − ΥC(ωr)
ωr(∂/∂ωr)Re δTK(ωr).(131)
Equation (131) clearly indicates the existence of a threshold in the energetic particle drive,∝ Im δTK , for the excitation of these modes which, for this reason, are called EnergeticParticle Modes (EPM’s) [41]. The threshold condition is set by continuum damping,which is proportional to ΥC . It is evident, already from this preliminary discussion,that EPM’s, which will be discussed in detail below, are not eigenmodes of the thermalplasma and that, therefore, their stability properties and non-linear evolution may bequite different from those of TAE and KTAE.
In refs. [26, 49] it has been shown that also the general “even parity” (2) KTAEdispersion relation may be written in the same form of eq. (128), i.e.,
Υ`,u(Ω) = δTK + δTf(s, α) ,(132)
where Υ` and Υu refer, respectively, to lower and upper KTAE spectra and are given by
Υ` =e−iπ/4
(2∆K)1/4
Γ(1/4 + a`/2)
Γ(3/4 + a`/2),
Υu = (2∆K)1/4 Γ(3/4 + au/2)
Γ(1/4 + au/2).(133)
Here, Γ is the Euler Γ-function, ∆K = s2ρ2K/(ε0Ω
2)3 and
a` =−i(Γ+ − β1)√2sρK/
√ε0Ω2
,
au = − (Γ− − β1)√2sρK/
√ε0Ω2
.(134)
In the case |δTf | 1 and with weak energetic particle drive, eq. (132) is easily reducedto [26, 49]
(Γ+ − β1)
ε0Ω2' −i
√2∆K
1
2+ 2N − (2N + 1)!!
(2N + 1)×
(2) Here, parity is referred to the mode parity with respect to the transformation (θ, θk) → (−θ,−θk).Incidentally, we note that TAE are characterized only by even parity.

40 G. VLAD, F. ZONCA and S. BRIGUGLIO
×e−iπ/4 [δTK + δTf ]
(2∆K)1/4
2N−1N !√π
,(135)
for the lower “even parity” KTAE, whereas the upper KTAE branch turns out to be:
(Γ− − β1)
ε0Ω2'√
2∆K
3
2+ 2N +
(2N + 1)!!
2NN !×
× (2∆K)1/4
√π
[δTK + δTf ]
.(136)
In addition to the “even parity” KTAE branches, it is possible to demonstrate that “oddparity” KTAE’s also exist and are described, in the |s|, |α| 1 limit, by the dispersionrelation
1
Υ`,u(Ω)= −
[sπ
4
(1 +
α
αc
)+ δTK
].(137)
Analogously to the “even parity” KTAE branches, when |δTf | 1 and energetic particledrive is weak, eq. (137) reduces to
(Γ+ − β1)
ε0Ω2' −i
√2∆K
3
2+ 2N − (2N + 1)!!
2NN !×
×eiπ/4 (2∆K)1/4
√π
[δTK +
sπ
4
(1 +
α
αc
)],(138)
for the lower KTAE branch, and to
(Γ− − β1)
ε0Ω2'√
2∆K
1
2+ 2N +
(2N + 1)!!
(2N + 1)×
×
[δTK +
sπ
4
(1 +
α
αc
)]
(2∆K)1/4
2N−1N !√π
,(139)
for the upper KTAE branch. To the lowest order, it is readily seen that eqs. (135), (136),(138), and (139) reduce to eqs. (119), as expected.
Equation (137) helps clarifying the reason why a “odd parity” TAE mode cannotexist, since [26, 49] it should fulfill the dispersion relation
1
Υ(Ω)=
(− (Γ− − β1)
(Γ+ − β1)
)1/2
= −[sπ
4
(1 +
α
αc
)+ δTK
].(140)
Equation (140) can never satisfy the causality constraint ReΥ(Ω) > 0 for sufficientlysmall energetic particle contribution, i.e., in the typical condition in which a TAE couldbe excited. On the contrary, eq. (140) may describe the resonant excitation of an “oddparity” EPM, for which an equation similar to eq. (131) can be written above a certainthreshold in energetic particle density.

DYNAMICS OF ALFVEN WAVES IN TOKAMAKS 41
2.5.5. Energetic Particle Modes
That a close relationship exists between TAE, KTAE and EPM can be readily seen froma comparison between eqs. (128) and (140) on one side and eqs. (132) and (137) on theother. In fact, Υ`,u(Ω) → Υ(Ω) as |a`,u| → ∞. Thus, when the perturbative assumptionthat yields eqs. (135), (136), (138), and (139) breaks down, the response of the thermalplasma can be considered “ideal” and all modes (TAE, KTAE and EPM) are describedby the same dispersion relations, eqs. (128) and (140), any distinction between thembeing reduced to differences in the mode growth-rate. In fact, a careful examinationof eqs. (135) and (139) indicates that, if KTAE’s are driven strongly enough that theperturbative treatment of energetic particle dynamics fails, the even and odd ideal EPMbranches get excited and emerge, respectively, from the closest even lower KTAE andodd upper KTAE [26, 49]. Using the Stirling approximation to factorials, the conditionfor break down of perturbative analyses reads, respectively,
|δTK | >∼ N 1/2 |∆K |1/4 ∼∣∣∣∣(Γ± − β1)
ε0Ω2
∣∣∣∣1/2
,(141)
which is equivalent to the threshold condition for EPM excitation, eq. (131). This resultdemonstrates that the most unstable energetic-particle-driven shear Alfven gap modesare “ideal modes”. In the absence of TAE (α > αc) and EPM (i.e., below the thresholdcondition set by eq. (131)), only moderately unstable upper KTAE can be excited [26, 49],the lower branch being generally more stable [30].
The merging of the odd EPM mode into an odd mode of the upper KTAE branchin shown in figs. 15 and 16. There, for simplicity, only two modes of the upper KTAEspectrum are shown, as obtained from a numerical solution of the dispersion relationseq. (132) (boxes) and eq. (137) (crosses). The energetic particle response, eq. (129), iscomputed assuming a slowing-down distribution function, with birth speed 1.3vA. Thesolution of eq. (140) is also reported (circles) to show that, as −R0q
2β′H increases, the odd
KTAE clearly becomes an unstable EPM, whereas the even KTAE growth rate remainsessentially unchanged. The sharp change in the slope of the growth-rate for increasing−R0q
2β′H indicates the existence of a threshold for EPM excitations, which may be well
identified with that of eq. (131).The resonant excitation of even parity EPM’s is usually related to finite thermal
plasma pressure effects. In fact, as discussed above in this section, TAE’ modes tendto merge into the lower Alfven continuum when α > αc(s). Under such circumstances,such modes become eigenmodes of the lower KTAE branch and tend to be stabilized viaconvective damping. Thus, above the threshold set by eq. (131), the most unstable modeis a low frequency EPM [63]. Figure 17 shows how such a transition from unstable TAEto unstable EPM modes occurs as α is increased above αc. These results are obtainedfrom numerical solutions of eq. (120), using ε0 = 0.1, s = 0.32, −R0q
2β′H = 0.121
and vH/vA = 1.0 as fixed parameters. In this case, the numerical threshold for EPMexcitation was found to be −R0q
2β′Hc ' 0.05. Note that the transition from TAE to
EPM cannot be considered as a smooth one, since both modes coexist.
2.6. Waves in a torus: numerical results. – In the previous section, the problem
of linear stability of shear Alfven modes has been treated for idealized circular-cross-section plasma equilibria on the basis of asymptotic analyses, which are fully justified inthe limit of high toroidal mode number. The interest in moderate, or even low toroidalnumber modes (which can be of great relevance in the interpretation of present plasma

42 G. VLAD, F. ZONCA and S. BRIGUGLIO
-0.1
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.10 0.15 0.20 0.25
Im ( Γ+ - β
1)
- R0q2β
H'
Fig. 15. – Normalized growth rate, Im (Γ+ −β1) for two modes of the upper KTAE branch witheven (boxes) and odd (crosses) parities. Fixed parameters, here, are: s = 0.5, α = 0, ∆K = 0.01and β1 = −0.01i. An odd EPM is also shown for reference (circles).

DYNAMICS OF ALFVEN WAVES IN TOKAMAKS 43
3.30
3.35
3.40
3.45
3.50
3.55
3.60
3.65
0.10 0.15 0.20 0.25
Re ( Γ+ - β
1)
- R0q2β
H'
Fig. 16. – Normalized real frequency, Re(Γ+ − β1) for two modes of the upper KTAE branch.An odd EPM is also shown for reference. Fixed parameters and symbols are the same as infig. 15.
experiments) justifies the numerical approach to the problem. Indeed, in this limit theeigenfunction corresponding to global modes are fairly broad, and thus large portionsof the plasma discharge will be displaced from the rest position. On the one hand, thisfact makes modes that are eventually driven unstable particularly dangerous, because oftheir effect on the macroscopic properties of the plasma discharge (particle and energyconfinement, etc.). On the other hand, it greatly limits the applicability of the asymptoticanalyses which make analytic studies possible.
Further motivation for the numerical approach is given by the need of extendingthe investigation to non-linear evolution of the Alfven modes, and considering realisticshaped-cross-section experimental devices. Although in this paper we will not addressthis latter problem, it is instructive, before analyzing non-asymptotic and/or non-linearregimes, to show the main features of the Alfven spectrum in a present-day tokamakconfiguration, namely the Joint European Torus [2] (JET). The JET plasma equilibriumhas a shaped poloidal cross section described by the following equations:
R = R0 (1 + a/R0) cos(ϑ+ δ sinϑ) ,Z = aκ sinϑ ,
(142)
where ϑ is the poloidal angle, a/R0 = 0.423 is the inverse aspect ratio, κ = 1.68 andδ = 0.3 are the ellipticity and the triangularity of the plasma boundary, respectively.Equilibria with shaped-plasma cross sections are generally preferred to circular onesbecause of their improved performance in terms of thermonuclear plasma figures of merit.In fig. 18, the poloidal cross section of the JET tokamak is shown, for an equilibrium

44 G. VLAD, F. ZONCA and S. BRIGUGLIO
ϑH
Fig. 17. – Real frequency and growth rates for the two most unstable modes obtained from anumerical solution of eq. (120). The TAE mode is indicated by open circles and the EPM modeby triangles. The growth rates are maximized with respect to kϑρLH . The corresponding peaksof the qR0k‖ spectrum are also shown.

DYNAMICS OF ALFVEN WAVES IN TOKAMAKS 45
obtained with the CHEASE code (see appendix sect. 5.1) assuming a volume average
β ≈ 3% and the safety factor q ranging from q(0) ≈ 1 to q(a) ≈ 6. It is to be noted that
Fig. 18. – Poloidal cross section for a typical JET equilibrium.
non-circular shapes of the internal magnetic surfaces could be developed even in plasmaequilibria with circular boundary because of the natural outward Shafranov shift of themagnetic axis. Besides the gaps in the continuum spectrum induced by toroidicity, higherorder gaps appear, in general configurations, because of coupling of poloidal harmonicsmwith m±2,m±3, . . ., being related, e.g., to ellipticity, triangularity, etc. The continuousAlfven spectrum for the toroidal mode number n = 1 is shown in fig. 19, as obtainedfrom the code MARS assuming an ideal plasma with Γ = 0 (that is, excluding theslow magnetosonic wave continuum) and a plasma density %0(s) = %0(0)(1 − s2). Gapscentered around ω/ωA ≈ 0.4 (the toroidicity induced gap) and ω/ωA ≈ 0.9 (the ellipticityinduced gap) appear in the Alfven continuum. Also the dominant poloidal componentsare marked for each portion of the spectrum, from which it is possible to observe thatthe toroidicity induced gap results from the coupling of the m with the m±1 harmonics,while the ellipticity induced gap is given by the coupling of the m with the m± 2 ones.The presence of several discrete Alfven modes is also indicated (TAE’s and Ellipticity

46 G. VLAD, F. ZONCA and S. BRIGUGLIO
0.0
0.2
0.4
0.6
0.8
1.0
1.2
0.0 0.2 0.4 0.6 0.8 1.0
ω /ωA
s
TAE
EAE
0 3 1
21 3
11 2 2 3
4 2
2 43
0
Fig. 19. – Alfven frequency spectrum (for toroidal mode number n = 1) for the JET equilibriumshown in fig. 18. The dominant poloidal components in the Alfven continua are marked on thecurves. Also, the global gap modes are shown.
induced Alfven Eigenmodes (EAE’s)) in fig. 19.
2.6.1. Global toroidal modes
We start the investigation of the non-asymptotic low-n limit considering a circular-cross-section equilibrium, with safety factor q ranging from ≈ 1.1 to ≈ 1.8, inverse aspectratio ε = 0.1, flat radial density profile, and zero plasma pressure. Consistently withthe choice of a small value of ε, we will take into account only the coupling betweenadjacent poloidal components. The eigenvalue version of the MARS code will be used(see appendix sect. 5
.2), generalized to a complex resistivity to represent in a simple way
the kinetic effects associated to finite ion Larmor radius.
In fig. 20 the Alfven continuous spectrum for the n = 1 mode is shown versus theradial-like variable s, considering only the poloidal mode components m = 1, 2.
The cylindrical Alfven continuous spectra are also shown (dashed lines). At theradial location s0 where the safety factor is q(s0) = (2m + 1)/(2n), and where the twocylindrical continua are degenerate, a “gap” appears, the width of which is ordered withthe local inverse aspect ratio εs0 = r(s0)/R0. In fig. 21, the radial velocity eigenfunction isshown for the TAE mode, which lies within the gap at ω/ωA ' 0.316. It is a global mode,in the sense that the eigenfunction is radially extended over a large portion of the plasmacross section. Such eigenfunction exhibits the larger variation around the gap position.This mode is a purely oscillating mode (marginally stable mode) in ideal MHD. Addingnon-ideal terms to the MHD equations (as, e.g., resistivity, finite ion Larmor radius,parallel electron dynamics or kinetic effects associated with electron Landau damping)

DYNAMICS OF ALFVEN WAVES IN TOKAMAKS 47
0.0
0.2
0.4
0.6
0.8
1.0
1.0
1.2
1.4
1.6
1.8
0.0 0.2 0.4 0.6 0.8 1.0
ω /ωA
q
s
m=2
m=1
Fig. 20. – Upper and lower branches of the Alfven frequency spectrum for the circular crosssection case, n = 1, m = 1, 2 (solid lines). Also the cylindrical m = 1 and m = 2 continuousspectra are shown (dashed lines).
0.000
0.001
0.002
0.003
0.004
0.005
0.006
0.0 0.2 0.4 0.6 0.8 1.0
s
m=1
m=2
vm,1
s
Fig. 21. – Radial profile of the poloidal harmonics of vs for the ideal TAE.

48 G. VLAD, F. ZONCA and S. BRIGUGLIO
slightly modifies the nature of the TAE, the main difference being the appearance of acomplex part of the eigenfrequency, but it gives rise, as discussed in sect. 2
.5, to the
KTAE’s or their purely resistive version, the RPSAE’s.
In figs. 22 and 23 the real frequency and the damping rate of the TAE and of the lessstable upper and lower branches of the RPSAE’s (corresponding to N = 0 in eqs. (119))are shown versus the inverse of the Lundquist number, S−1 ≡ ηc2R0/(4πa
2vA). Theresults for the RPSAE’s slightly depart from the perfectly-symmetric theoretical predic-tions discussed after eqs. (119) because of the weak radial dependence of the equilibriumquantities. Their damping rate scales as the square root of the resistivity γ ∝ η1/2,whereas the TAE damping rate is found [30, 64] to scale as γ ∝ η1/3 in the limit of largeresistivity, ηn2q(s0)
3[a/r(s0)]2 2εs0 , and as γ ∝ η/ε2s0 in the limit of small resistivity,
ηn2q(s0)3[a/r(s0)]
2 2εs0 .
0.25
0.30
0.35
0.40
10-7 10-6 10-5 10-4
ω /ωA
S-1
upper RPSAE
lower RPSAE
TAE
Fig. 22. – Real frequency of TAE, upper and lower RPSAE versus resistivity.
The damping is due to the coupling with the KAW’s, and is associated to thepropagating component of such waves, which carry energy away from the gap region(radiative damping). In the case of the TAE (whose frequency is properly containedwithin the forbidden gap), the KAW’s can only be excited by tunneling [32], and thusthe damping is typically smaller than for RPSAE.
The inclusion of kinetic effects results in increasing the damping of the lower branch,whereas the upper branch tends toward the marginal stability. This can be seen fromfig. 24, which has been obtained from MARS simulations adding an imaginary part tothe resistivity to model kinetic terms.
In fig. 25 and fig. 26, the radial velocity eigenfunctions are shown for an upper(ω/ωA = 0.416) and lower (ω/ωA = 0.293) KTAE, respectively. A complex resistivitycorresponding to S−1 = (1 − 2i) × 10−5 has been assumed. The propagating character

DYNAMICS OF ALFVEN WAVES IN TOKAMAKS 49
10-5
10-4
10-3
10-2
10-1
10-7 10-6 10-5 10-4
-γ /ωA
S-1
lower RSPAE
upper RSPAE
TAE
Fig. 23. – Damping rate of TAE, upper and lower RPSAE versus resistivity.
-0.03
-0.02
-0.01
0.00
0.25 0.30 0.35 0.40 0.45
γ /ωA
ω /ωA
Fig. 24. – Complex frequency plane for gap modes. The open circle refers to the ideal TAE.Full circles refer to the resistive TAE and RPSAE (S−1 = 10−5). Open and full squares referto TAE and KTAE (S−1 = (1 − i) × 10−5 and S−1 = (1 − 2i) × 10−5, respectively). Also theupper and lower Alfven continua are shown.

50 G. VLAD, F. ZONCA and S. BRIGUGLIO
-0.006
-0.004
-0.002
0.000
0.002
0.004
0.006
0.008
0.0 0.2 0.4 0.6 0.8 1.0
s
m=1m=2
vm,1
s
Fig. 25. – Radial profile of the poloidal harmonics of vs for the upper KTAE. Real (full line)and imaginary (dashed line) part of the eigenfunctions are shown.
-0.003
-0.002
-0.001
0.000
0.001
0.002
0.003
0.004
0.005
0.0 0.2 0.4 0.6 0.8 1.0
s
m=1
m=2
vm,1
s
Fig. 26. – Radial profile of the poloidal harmonics of vs for the lower KTAE.

DYNAMICS OF ALFVEN WAVES IN TOKAMAKS 51
of the eigenfunction is clearly visible in the gap internal region (0.7<∼ s<∼ 0.9) for the
upper branch and in the external region (s<∼ 0.7 and s>∼ 0.8) for the lower branch. Atypical TAE (ω/ωA = 0.318) is shown, in the presence of kinetic effects, in fig. 27 and isto be compared with the ideal TAE of fig. 21: only small oscillations of the eigenfunctioninside the gap region are present, which are typical of the (weak) coupling to KAW’s.
-0.001
0.000
0.001
0.002
0.003
0.004
0.0 0.2 0.4 0.6 0.8 1.0
s
m=1
m=2
vm,1
s
Fig. 27. – Radial profile of the poloidal harmonics of vs for the kinetic TAE.
Some general considerations can be done on the parity of the eigenfunctions of theglobal mode considered above. Following ref. [40] an expression for the radial derivative
of the Fourier components δφ1,1 and δφ2,1 of the scalar potential can be obtained fromeq. (82):
dδφ2,1/dr
dδφ1,1/dr∝ −
ω2/ω2A − k2
‖1,1R20
ω2/ω2A
≈ −ω2/ω2
A − 1/9
ω2/ω2A
.(143)
The upper branch of the KTAE is characterized by ω2/ω2A > 1/9, and thus the two
different Fourier components are out of phase as can be observed in fig. 25. On thecontrary, the lower KTAE and, for typical equilibria, also the TAE are characterized byω2/ω2
A < 1/9, and their Fourier components are mutually in phase (figs. 21 and 26).
2.6.2. Continuum damping
In the present section we study the continuum damping of a TAE mode, considering anequilibrium similar to the one used in the case shown in fig. 20, but imposing q(0) =1.4, thus shifting the localization of the gap toward the center of the plasma column.Moreover, a radial density profile %0(s) = %0(0)(1 − s4)c% is used, with c% > 0, causingthe Alfven continuum frequency to increase at the plasma edge. This choice allows us to

52 G. VLAD, F. ZONCA and S. BRIGUGLIO
better separate the gap region (where the mode is localized) from the plasma boundary,where the interaction with the continuum takes place. Considering, as before, the (1, 1)and (2, 1) harmonics, the gap is localized around s = 0.5, and the TAE resonantly excitesthe continuum for c%>∼ 0.5. The damping rate can be obtained from the MARS codetaking the limit of vanishing resistivity for a resistive TAE (see, e.g., ref. [65]) shown, atdifferent values of LA (cf. eq. (110)), in fig. 28. Note that the scaling observed in fig. 28
0
0.0004
0.0008
0.0012
0.00 0.02 0.04 0.06 0.08 0.10
-γ /ωA
|LA|/a
Fig. 28. – Continuum damping rate versus |LA|/a (with |LA| being the scale-length of %0q2).
is apparently opposite with respect to that ≈ |LA|−3/2, apparently given by eq. (110)and usually quoted in literature for the high-n case. In fact, in the present low-n case,changing the c% coefficient also modifies the tunneling factors in the same equation. Thiseffect can not be considered as a minor correction to the power-scaling result, due to theexponential dependence of such factors.
This shows that, when TAE has significant amplitude at the radial locations wherethe Alfven continuum is resonantly excited, strong coupling to the continuous spectrumand large mode damping due to phase mixing can occur. This is true, a fortiori, in thosesituations in which the interaction takes place in a region where the mode is not in cut-off.One of such situations occurs when the plasma β is raised above a critical threshold [38].In fact, finite β causes the local TAE frequency to shift downwards, eventually touchingthe lower boundary of the frequency gap, where the eigenfunction is close to its maximumamplitude. It has to be noted that in the case of TAE modes merging into the lowercontinuum, analytic treatments, which are usually based on perturbation theories, areno longer valid and fully non-perturbative treatments, as those obtainable by numericalsimulations, are needed to properly describe the mode dynamics.

DYNAMICS OF ALFVEN WAVES IN TOKAMAKS 53
2.6.3. Kinetic effects
In sect. 2.5 it has been pointed out that, depending on the relative importance of toroidal
equilibrium effects vs. kinetic dissipation terms, TAE’s may exist in their “regular” MHDor in their kinetic modified version, the KTAE. Aim of the present section is to com-pare those analytical estimates with the results yielded by linear simulation performedby the linear hybrid MHD-gyrokinetic numerical code (see appendix sect. 5
.5). Such
simulations are performed by using the δF algorithm (i.e., numerically evolving onlythe perturbed part of the energetic-particle distribution function) and retaining only theunperturbed terms when advancing the phase-space particle coordinates (the gyrocenterposition R, the magnetic moment M and the parallel velocity U) according to eqs. (192)(see appendix sect. 5
.5); the linearly perturbed terms are instead included in the evo-
lution of the weight factors, eq. (207). Furthermore, the mirroring term, i.e., the termproportional to b · ∇ lnB0 in dU/dt, responsible for particle trapping is neglected, as ouranalysis is focused, for simplicity, on the effects of circulating particles.
We consider an equilibrium magnetic field characterized by ψeq(r, ϑ) = ψeq0 (r) +ψeq1 (r) cosϑ, with q-profile approximately given by q(r) ' q(0) + [q(a) − q(0)] r2/a2,with q(0) = 1.1 and q(a) = 1.9. Perturbations with two coupled harmonics, (1, 1) and(2, 1), are taken into account for ψ and φ. With the equilibrium considered here, thefrequency spectrum for the shear Alfven modes shows a single-gap structure with the gaplocalized at r ≡ r/a ' 0.7. A TAE-like radial mode structure is chosen for the Fouriercomponents of the initial electromagnetic perturbation (the scalar potential is shown infig. 29), resulting from a preliminary simulation performed with a model driving term.Note that the two poloidal harmonics of the scalar potential are mutually in phase, as
1 10-35 10-2
00
0
-1 10-3
-1 10-1
-5 10-2
0.2 0.4 0.6 0.8 1.0
r/a
0 0.2 0.4 0.6 0.8 1.0
r/a
ˆδφ1,1ˆδφ2,1
Fig. 29. – Radial profiles of the real (solid line) and the imaginary (dashed line) part of theFourier components of the initial perturbed scalar potential δφ at t = 0. The two poloidalharmonics (1, 1) and (2, 1) are mutually in phase, corresponding to a TAE-like structure. Thegap region is localized at r/a ≈ 0.7.

54 G. VLAD, F. ZONCA and S. BRIGUGLIO
expected on the basis of eq. (143).The time evolution of the two Fourier components of the total (magnetic plus kinetic)
fluctuating energy for the hybrid simulation with inverse aspect ratio a/R0 = 0.25,vH/vA = 1, βH(0) = 0.04 and mH/mi = 2 is shown in fig. 30. The other parameters are
10-3
10-4
10-5
10-6
10-7
10-8
200 4000
WTOTm,n
(1,1)
(2,1)
ωA t
Fig. 30. – Time evolution of the Fourier components m = 1, 2 and n = 1 of the total (magneticplus kinetic) fluctuating energy for the hybrid simulation with vH/vA = 1, βH(0) = 0.04,mH/mi = 2, a/R0 = 0.25, ρLH/a = 0.01, αn = 2, a2/L2
n = 2, S−1 = 10−5. The initial TAE-likeconfiguration incoherently decays, because of the strong coupling with KAW’s. Later on, thefluctuating energy starts to grow due to the formation of an unstable KTAE.
the following (see appendix sect. 5.5): ρLH/a = 0.01, αn = 2, a2/L2
n = 2, S−1 = 10−5. Inspite of the strong energetic-particle drive, the initial configuration incoherently decays,indicating that, due to the strong coupling with KAW’s, the TAE is damped, contrary towhat could be inferred from a perturbative treatment of the energetic-particle dynamics.
Later on in the simulation, the fluctuating energy starts to grow, because an unstableKTAE emerges. This can be seen from fig. 31, which shows the perturbed-field profilesat t = 576ω−1
A . The KTAE upper-branch symmetry ∂rδφ2,1/∂rδφ1,1 < 0 is evident.This result [61] can be understood from fig. 32, where the analytical estimates for
the growth rate of the TAE, eq. (125), and that of the KTAE, eq. (127), are plottedversus the on-axis βH value. The value corresponding to the simulation is also shown.For this value the KTAE is predicted to be more unstable than TAE. Without finitedrift-orbit size effects (βH = ρ2
KH = δ = 0), eqs. (125) and (127) would have indeed

DYNAMICS OF ALFVEN WAVES IN TOKAMAKS 55
ˆδφ1,1 ˆδφ2,1
-0.002
-0.004
-0.006
0.0060
0.004
0.002
0
0 0.2 0.4 0.6 0.8 1.0
r/a
0 0.2 0.4 0.6 0.8 1.0
r/a
Fig. 31. – Radial profiles of the fluctuating-potential Fourier components at t = 576 ω−1
A . The
KTAE upper-branch symmetry, ∂rδφ2,1/∂rδφ1,1 < 0, is consistent with the occurrence of a peakin the frequency spectrum close to the upper boundary of the gap.
10-5
10-4
10-4
10-3
10-3
10-2
10-2
10-1
10-1
100
100
γ/ωA
βH (0)
KTAETAE
Simulation
value
Fig. 32. – Analytical estimates for the growth rates of the TAE (dashed line) and KTAE (solidline) versus βH(0). The value chosen for the simulation is indicated by an arrow. For this valuethe KTAE is predicted to be more unstable than the TAE.

56 G. VLAD, F. ZONCA and S. BRIGUGLIO
predicted the TAE mode to be more unstable than the upper KTAE branch, showingthe essential role played by these effects in bringing the TAE mode so close to the lowershear Alfven continuous spectrum that it is completely stabilized by the coupling to thelower KTAE branch, as discussed in sect. 2
.5.
The growth rate of the KTAE, obtained from numerical simulations at a fixed valueof βH(0) = 0.04 and different values of vH/vA, is shown in fig. 33 along with the analyticalvalue (dashed line) obtained from eq. (127). The main qualitative features are well
0.03
0.02
0.01
0
0 1 2 3
vH /vA
γ/ωA
Fig. 33. – Growth rate of the KTAE mode versus vH/vA, at a fixed value of βH(0) = 0.04.Open squares refer to the hybrid-code simulations. The dashed line corresponds to eq. (127),in which only the local contribution to the drive from the gap region is retained. The solid linewas obtained by replacing, in eq. (127), the local drive with the expression given by eq. (144),computed in terms of the scalar-potential profiles obtained from the hybrid simulations withvH/vA = 1.
reproduced: the maximum growth rate at vH ≈ vA, corresponding to the resonantcharacter of the driving mechanism, and the effect of the secondary resonance at v‖ ≈vA/3. The quantitative agreement, however, appears to be quite poor. This can be
attributed to the approximations adopted in calculating the expressions for β, δ and ρ2KH
(eqs. (123)). In particular, it has been assumed that the energetic-particle contributionto the driving and damping terms comes essentially from the gap region, where the fieldamplitude is maximum. This is justified with regard to the finite Larmor radius terms δand ρ2
KH , whilst it is not a good assumption for the driving term, γH ≡ Im β ωA/[2ω(1−ε0)q
2], which receives significant contributions from the whole radial extension of theeigenmode for realistic (not too large) values of the aspect ratio of the torus. A moreaccurate estimate of γH can be obtained in terms of the energetic-particle contributionto the potential energy δWK and of the plasma kinetic energy KM , as [23]
γH ' Im limImω→0
δWK/KM '
− 1
2ρLH
vHvA
mH
mi
nH0
n0Re
∫d3r δP b×∇R·∇δφ∗∫
d3r |∇⊥δφ|2.(144)
The value of γH can then be computed by using the following approximate expressionsfor the perturbed pressure δP [61]:

DYNAMICS OF ALFVEN WAVES IN TOKAMAKS 57
δPm,n(r, t) ' − 2m
nH0
R0
a
vHvA
ρLHa
ωAω
δ
ˆφm,nr
∂nH∂r
δPm±1,n(r, t) ' ± m
nH0
R0
a
v2H
v2A
ρ2LH
a2
(ωAω
)2(∂
∂r∓ m
r
)δ
ˆφm,nr
∂nH∂r
×
z±3z± + 2z3
± +[1 + 2z2
±(1 + z2±)]Z(z±)
,(145)
and using the scalar-potential profiles obtained from the hybrid simulations with vH/vA =1. In eqs. (144) and (145), we have defined
δP ≡ δP‖ + δP⊥,
δP‖ =
(2π
nH0TH
)∫dMdUΩHU
2δFH
and
δP⊥ =
(2π
nH0TH
)∫dMdU
Ω2H
mHMδFH ,
with δFH being the perturbed energetic-particle distribution function in the gyrocentercoordinate system. Moreover, δφ ≡ eHδφ/TH , z± ≡ ωvA/
[√2ωAvH |(m± 1)/q − n|
],
and Z is the plasma dispersion function [66].
The solid line in fig. 33 is the result of eq. (125), in which Im β is substitutedwith 2(ω/ωA)(1 − ε0)q
2γH , and γH is obtained from eq. (144). The agreement withthe simulation findings is now excellent, showing the relevance that details neglectedin the asymptotic treatment can assume in realistic situations, and, in particular theimportance of the broad character of the eigenfunction for low-n modes.
Let us now look at the effect of increasing the energetic-particle drive. In fig. 34(a)the growth rate of the most unstable modes and the corresponding real frequency areplotted at different values of βH(0), for a/R0 = 0.1 and the other parameters as infig. 30. Figure 34(b) shows the gap structure corresponding to the equilibrium and themode numbers considered here. Two different regimes can be recognized. At low valuesof βH , the KTAE is the most unstable mode. The real frequency ωr of the mode comesout to be close to the upper boundary of the gap and the mode structure – analogousto that shown in fig. 31 – exhibits its sharpest variation in correspondence of the gapregion. The growth rate is weakly dependent on βH , and satisfies the condition γ ωr.Above a certain threshold in βH (βH(0) ≈ 0.024 in this case) a new mode appears,with growth rate sharply increasing with βH . Its real frequency becomes very small (sothat γ ≈ ωr) and falls inside the lower continuum. The mode structure, reported infig. 35 for βH(0) = 0.03, shows the m = 1 and m = 2 poloidal components localized atr ≈ 0.3a and r ≈ 0.8a, respectively. Such localization appears to be mainly determinedby the boundary conditions and the resonant excitation of the shear Alfven continuousspectrum at the mode frequency, rather than by the gap position. Differently from theodd-symmetry KTAE case and consistently with the opposite localization of the realfrequency with respect to the centre of the gap, the two poloidal components show evensymmetry. All these features allows us to identify this mode as the EPM [26, 41].
It is worth to note that, while the TAE (or the KTAE) exists as a MHD (or kinetic)global mode and is affected by energetic-particle dynamics in a perturbative way (both

58 G. VLAD, F. ZONCA and S. BRIGUGLIO
0.00
0.04
0.08
0.12
0.0
0.2
0.4
0.6
0.8
0.005 0.015 0.025 0.035
βH (0)
γ /ωA
ωr/ω
Aωr KTAE
ωr EPMγ
KTAE
γEPM
a)
0.0 0.2 0.4 0.6 0.8 1.0
r/a
b)
Fig. 34. – Growth rate and real frequency of the most unstable modes versus βH(0) for linearsimulations of the n = 1 and m = 1, 2 components (a), and the corresponding shear Alfvencontinuous-spectrum (b). Here a/R0 = 0.1, ρLH/a = 0.01, αn = 2, a2/L2
n = 2. At low values ofβH , the KTAE (boxes) is the most unstable mode and the growth rate is weakly dependent onβH . For βH(0)>∼ 0.024 the Energetic Particle Mode (circles) appears, with growth rate sharplyincreasing with βH .
δφ1,1ˆδφ2,1ˆ
0
8
0.2 0.4 0.6 0.8 1.0
r/a
0 0.2 0.4 0.6 0.8 1.0
r/a
6
4
4
3
2
12
Fig. 35. – Radial profiles of the scalar-potential components for a simulation with βH(0) = 0.03.The two components are peaked quite far from the gap position and show even symmetry. Theirlocalization is determined by the boundary conditions and the resonant excitation of the shearAlfven spectrum at the mode frequency. This mode can be identified as the Energetic ParticleMode.

DYNAMICS OF ALFVEN WAVES IN TOKAMAKS 59
mode structure and real frequency are substantially determined by the MHD terms ineqs. (180) and (183)), the EPM exists only because of the energetic-particle contribu-tion. Not only its growth rate, but also its localization and real frequency are, in fact,determined by the competition between energetic-particle resonant drive and continuumdamping. In this respect, the presence of a frequency gap, needed for the formation ofMHD/kinetic global modes, is not directly related to their existence.
These features of the EPM strongly limit the validity of any perturbative treatmentof the linear stability of shear Alfven modes. We can appreciate this fact by comparingthe results obtained by the just described self-consistent simulations with those of simpli-fied “perturbative” ones. These latter are performed by approximating the evolution ofthe perturbed fields in the following way: both the real frequency and the radial profileof the mode are fixed, while the growth rate is computed, at each step, by retainingthe energetic-particle contribution on the basis of an approximate expression like thatof eq. (144). The damping mechanisms are surrogated by a fixed background dissipa-tion rate γD. This approach bypasses the MHD field solver and clearly corresponds toneglecting the effects of the particles on the mode structure and on its frequency, andclosely resembles that of refs. [67, 68, 69], with a little difference: the real frequency shiftdue to energetic particles, neglected here, is evaluated there on the basis of a perturbativeexpression analogous to that used to compute the growth rate.
The comparison between the above self-consistent results and the findings of pertur-bative simulations is presented in fig. 36. The radial profiles adopted, for the fluctuating
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.00 0.05 0.10 0.15 0.20
γ /ωA
βH (0)
self-consistent
perturbative
Fig. 36. – Growth rate versus βH(0) for self-consistent (circles) and perturbative (boxes) linearsimulations in the n = 1 case. A fixed real frequency ωr = 0.33 ωA has been assumed forperturbative simulations. Perturbative results agree quite well with the self-consistent ones inthe KTAE regime, but do not exhibit the transition to the EPM unstable regime.

60 G. VLAD, F. ZONCA and S. BRIGUGLIO
potentials, in such perturbative simulations correspond to a n = 1 KTAE-like eigen-mode. A fixed value ωr = 0.33ωA has been assumed for the real frequency. Whilethe two treatments show fair agreement in the KTAE regime, the EPM destabilizationcannot be reproduced in the perturbative framework.
The results on the transition from gap modes (TAE’s and KTAE’s) to continuummodes (EPM’s) seem consistent with those reported, for the high-n limit, in sect. 2
.5.5.
Note that the present investigation, as that of ref. [63], suggests that such transitioncannot be described as a smooth one. The coexistence of the two distinct modes, withsharply different real frequencies, can indeed be made evident by looking at the transitionregime, where the respective growth rates are of the same order. Figure 37 shows thetime evolution (a) of the m = 2 component of the fluctuating scalar potential andthe corresponding frequency spectrum (b) at r = 0.5 a, for βH(0) = 0.024. Both the
δφ2,1(ω)ˆδφ2,1(t)ˆ
-0.5 10-3
0
0.5 10-3
-0.0025
-0.0050
0.0025
0.0050
0
0 100 200 -1.0 -0.5 0 0.5 1.0
ωA t ω/ωA
Fig. 37. – Time evolution (a) and corresponding frequency spectrum (b) of the m = 2 fluctuatingscalar potential at r = 0.5 a, for a simulation with βH in the transition regime from KTAE toEPM (βH(0) = 0.024). The coexistence of unstable EPM and KTAE, with real frequenciesωr ≈ 0.14 ωA and ωr ≈ 0.56 ωA respectively, can be observed.
KTAE and the EPM are visible, with real frequencies ωr ≈ 0.56ωA and ωr ≈ 0.14ωArespectively.
Similar results are found in the case of higher – although still moderate – toroidalmode number n. In fig. 38(a) real frequencies and growth rates are reported versusβH(0) for the case of modes with n = 4 and m ranging from 4 to 8 (only the poloidalcomponents that yield, for the considered q profile, frequency-gap positions properlycontained inside the plasma volume have been retained). The corresponding shear Alfvencontinuous spectrum is shown in fig. 38(b). For βH(0)>∼ 0.02, the real frequency is solow, compared with the growth rate, that it cannot be determined on the basis of thenumerical-simulation results. The destabilization of EPM’s is observed, in this case,at much lower values of βH than those observed in the n = 1 case. This can also beseen from fig. 39, where the n dependence of the threshold βH(0) is shown. In orderto qualitatively explain this dependence, we assume that the continuum damping of themode does not depend on n, which is certainly true in the high-n limit (cf. eq. (131)).Moreover, it has been shown that the energetic-particle drive, close to the threshold,is proportional to βH [41], and that it grows linearly with n for low n values, while itdecreases as n−3 in the large-n limit [25, 26, 41, 62, 70]. By balancing damping and driveterms, βHth can then be predicted to decrease as n−1 for low-n modes and to increase asn3 at large n, so that it is expected to reach a minimum at some intermediate value of

DYNAMICS OF ALFVEN WAVES IN TOKAMAKS 61
0.00
0.05
0.10
0.15
0.20
0.25
0.0
0.2
0.4
0.6
0.8
0.000 0.005 0.010 0.015 0.020 0.025
γ /ωA ω
r/ω
A
βH (0)
a)
0.0 0.2 0.4 0.6 0.8 1.0
r/a
b)
Fig. 38. – Real frequency (boxes) and growth rate (circles) of the most unstable mode at differentβH(0) values for linear simulations of modes with n = 4 and m ranging from 4 to 8 (a), andthe corresponding shear Alfven continuous-spectrum (b). The real frequency for βH(0) = 0.02is too low, compared with the growth rate, to be appreciated from the numerical-simulationresults. The threshold for the EPM destabilization is much lower than in the n = 1 case.
0.001
0.01
0.1
0.1 1 10 100
βH (0)
th
n
Fig. 39. – Threshold βH(0) value for the EPM destabilization at different values of the toroidalmode number n. The results corresponding to n = 8 should be considered just as indicativeones, because of the reduced velocity-space resolution achieved in the corresponding high-spatial-resolution simulations.

62 G. VLAD, F. ZONCA and S. BRIGUGLIO
n. Simulation results show that such a minimum is not yet reached up to n = 8, so thathigher-n modes can be expected to have a even lower excitation threshold and to play arole in reactor-relevant tokamak plasmas.
3. – Non-linear Theory
3.1. Fluid non-linearities. – In the following, we discuss the non-linear dynamics of
the shear Alfven spectrum in a toroidal plasma. More specifically, we analyze the satura-tion of TAE modes via mode-mode couplings, assuming that slow beat wave fluctuationsare characterized by a phase velocity much smaller than the sound speed. Thus, the issueof resonant interactions with ions of the thermal plasma of sound-wave-like non-linearfluctuations, produced by ponderomotive forces associated with TAE’s, is neglected here.This topic is discussed in great detail in ref. [71], where TAE saturation via frequencycascading, due to non-linear ion Landau damping of low-frequency waves excited by thebeating of two TAE’s, is analyzed.
Following sect. 2.5, the non-linear equations for TAE’s will be derived from the
quasi-neutrality condition ∇ · δJ = 0; i.e., eq. (62). As shown there, the perpendicularcurrent perturbation is obtained from the perpendicular force balance, where, now, alsonon-linear terms are kept; i.e.,
δJ⊥
(1 +
δB‖
B0
)=
c
B20
B0 × (%0 + δ%)∂
∂tδv⊥ +
c
B20
B0 ×∇δP +
(J0‖ + δJ‖
) δB⊥
B0− δB‖
B0
c
B20
B0 ×∇P0 +
c
B20
B0 × %0 (δv⊥ · ∇) δv⊥ .(146)
Using the expression for δJ‖ as given by the parallel Ampere’s law and substitutingeq. (146) back into the quasi-neutrality condition, we obtain the following non-linearvorticity equation
∂
∂t
(B0 + δB⊥) · ∇
[1
B0∇2
⊥
(−1
cδA‖
)]+∇ ·
(1
v2A
)∂
∂t
[−(
1 +δ%
%0
)∂
∂t+
δv⊥ · ∇⊥
]∇⊥ δ φ
+8 π κ × B0
B20
·∇⊥
[δv⊥
c· ∇⊥ (P0 + δP )
]= 0 ,(147)
where δv⊥ = (c/B)b×∇⊥δφ. Here, all corrections of order O(ε/n) or higher have beenneglected, and only the leading order non-linear contributions have been retained. Notethat the parallel vector potential fluctuation, δA‖, is related with δψ, the fluctuation ofthe poloidal magnetic flux function ψ, as δA‖ = (R/R0)δψ. In deriving eq. (147), a high-n limit has been assumed. Moreover, the equilibrium terms have been separated fromfluctuating ones; in this way, we may directly identify the physical processes involved ineach of the considered non-linear processes.
Equation (147) is closed by the non-linear parallel Ohm’s law
−(
1
c
)∂
∂tδA‖ = b · ∇δφ+
δv⊥
c· ∇⊥δA‖ .(148)
The non-linear dynamics, described by the coupled Equations (147) and (148), canbe interpreted as follows. The term proportional to δB⊥ · ∇⊥ accounts for non-linear

DYNAMICS OF ALFVEN WAVES IN TOKAMAKS 63
magnetic field line bending, whereas those proportional to δv⊥ · ∇⊥ relate to non-linearE × B flows. Finally, the terms proportional to δ% and to δP account for non-linearfluctuations due to the ponderomotive force [B0/(cB0)] · (δJ × δB∗); in fact, it can beshown that only the slow non-linear fluctuations (δ%s/%0) and (δPs/P0) play a significantrole for β < ε/n, which we assume to be the case in the following.
Our purpose, here, is not to report on the details of the work published elsewhere [44,71, 72, 73, 74, 75, 76], but to give a discussion of the dynamic properties of TAE’s whichdetermine its non-linear saturation via mode-mode coupling at levels comparable with,or even lower than, that due to non-linear weakening of the energetic particle drive [43],which yields saturated amplitudes δBr/B0 ≈ (γ/ωr)
2 (cf. also sect. 3.4). However, it
is fundamental to note that, in both cases, the proposed picture of non-linear TAEsaturation can be considered correct only below the threshold for stochastic particleorbits.
The fact that mode-mode couplings can be very efficient in determining TAE’s non-linear saturation can be explained recalling that TAE modes exist in a narrow (toroidicityinduced) frequency gap in the shear Alfven continuous spectrum of approximate widthε0ωA (cf. eq. (87)). Therefore, the non-linear terms in the coupled equations (147)and (148) can alter the mode dynamics and eventually lead to saturation only whenthey introduce a time scale shorter than (ε0ωA)−1, or, more precisely, shorter than thedistance (in frequency), ∆ω, of the linear eigenmode from the accumulation point of theshear Alfven continuous spectrum (in certain conditions, |∆ω| |ε0ωA|).
Previous analyses [44, 72, 73], which have been recently confirmed [76], have consid-ered the effect of non-linear magnetic field line bending and of convective non-linearitiesassociated with the non-linear E × B drift, showing that TAE saturation may occurr,when the non-linear frequency shift becomes comparable with ∆ω, because of mode con-version to damped short-wavelength modes. Meanwhile, the possiblity of TAE saturationas a consequence of non-linear E×B∗ sheared flows, when the induced decorrelation rateovercomes ∆ω, was demonstrated in ref. [74] for the low-n case and in ref. [75] for the high-n one. Finally, in ref. [75], it was demonstrated that TAE saturation may take place vianon-linear density modulations (the term ∝ (δ%s/%0) in eq. (147)) and non-linear pressurecavitons (the term ∝ (δPs/P0) in eq. (147)) when the non-linear frequency shift becomescomparable with ∆ω .
In all these cases, the non-linear saturated phase is characterized by fine scale per-turbations to the radial mode structures. To see this effect more clearly, in what followswe will further delineate the solutions of eqs. (147) and (148) in two particular cases,i.e., when the non-linear mode dynamics is dominated by line bending together withnon-linear density modulations or convective non-linearities, respectively. The former ofthese cases has been analyzed in ref. [75] assuming the high-napproximation, whereas thelatter was first studied in ref. [73] in the low-n limit. Detailed discussions on the otherpossible non-linear TAE dynamics can be found in the above referenced literature. Forthe sake of simplicity and of a more compact formalism, we will initially assume n 1.In this way, we will be able to present a discussion of how the just mentioned mode-modecouplings may alter the local mode structure, eventually leading to saturation.
In the linear limit, the local TAE structure with toroidal mode number n is given bythe coupling of two poloidal harmonics, m and m+ 1, at the radial locations, r0, wherethese modes are degenerate, i.e., q(r0) = (2m + 1)/(2n). In toroidal coordinates, these

64 G. VLAD, F. ZONCA and S. BRIGUGLIO
modes may be represented as
δφm,n = e−i(ω0t−nϕ+mϑ)
(Te + Ti
e
)δΦ(nq −m, t) ,
where ω0 = ωA/(2q) = vA/(2qR0) and δΦ(nq −m, t) varies on a time scale ≈ (εω0)−1.
3.2. Non-linear density modulation. – Assume, first, that non-linear effects of pon-
deromotive force dominate in eqs. (147) and (148). Moreover, assume that the plasmaβ is sufficiently small to neglect the ballooning-interchange term in eq. (147) [57]. As aconsequence of mode couplings, there will be forced low frequency pressure perturbations,which may be obtained from the non-linear (perpendicular) force balance:
∇⊥
(δPs +
δB2⊥
8π
)= 0 .(149)
Meanwhile, assuming an isothermal process, the quasi-neutrality condition along witheq. (149) yields
δ%s%0
= − c2
4πn(Te + Ti)ω20
∣∣∣∇⊥(b · ∇δφ)∣∣∣2
.(150)
Here, we have also used eq. (148) to the required order, which, for a TAE of frequency ω0
reads δA‖ = −i(c/ω0)b·∇δφ. Since we are interested in the local non-linear modificationsto the TAE mode structure, we concentrate on the region nq −m ' 1/2, where, fromlinear theory, it is well known that only m and m + 1 mode numbers contribute, i.e.,only δΦ(nq −m, t) and δΦ(nq −m− 1, t) need to be taken into account. Using the factthat δΦ(z, t) is expected to have narrow mode structures about z = ±1/2, and to varyon a time scale ≈ (εω0)
−1, eq. (147) along with eq. (148) and eq. (150) can be rewrittenas:
(i∂t − ν) ∂νδΦ(ν + 1/2, t) + (ε0/4)∂νδΦ(ν − 1/2, t) +
bss2
4|∂νδΦ(ν − 1/2, t)|2∂νδΦ(ν + 1/2, t) = C1 ,
(i∂t + ν) ∂νδΦ(ν − 1/2, t) + (ε0/4)∂νδΦ(ν + 1/2, t) +
bss2
4|∂νδΦ(ν + 1/2, t)|2∂νδΦ(ν − 1/2, t) = C2 .(151)
Here, t ≡ ωAt/q, ν ≡ nq−m−1/2, bs ≡ (m/r0)2(Te+Ti)/miω
2ci, s = r0q
′/q and C1 andC2 are integration constants, which must be provided by the matching with the linearsolution [44]. It is possible to show [36] that C1 and C2 can be expressed as a functionof the ballooning representation [57] of δΦ(z, t):
δΦ(θ, t) =1√2π
∫ ∞
−∞
δΦ(z, t)e−iθzdz =Ac(θ1) cos(θ0/2) +As(θ1) sin(θ0/2)
(1 + s2θ21)1/2
,(152)
where θ0 ≈ 1 and θ1 ≈ 1/ε0 (eq. (152) is analogous to eq. (117)). It is readily demon-strated that [36]
C1 = −C2 =1√2π
Ac0s
,
∫ ∞
−∞
∂νδΦ(ν − 1/2, t)dν = −∫ ∞
−∞
∂νδΦ(ν + 1/2, t)dν =π√2π
As0s
,(153)

DYNAMICS OF ALFVEN WAVES IN TOKAMAKS 65
where Ac0 = Ac(θ1 = 0) and As0 = As(θ1 = 0). The quantities Ac0 and As0 are relatedby the TAE local dispersion relation which imposes
As0Ac0
= δTf ,(154)
with δTf being a function of equilibrium profiles related to the MHD (fluid) potentialenergy of the system.
Equations (151) can be put in a different form, which helps identifying the typicalmode amplitude at saturation: with the definitions
H = (s/2)(bs/ε0)1/2(∂νδΦ(ν − 1/2, t) − ∂νδΦ(ν + 1/2, t)) ,
K = −(s/2)(bs/ε0)1/2(∂νδΦ(ν − 1/2, t) + ∂νδΦ(ν + 1/2, t)) ,
ζ = 4ν/ε0 ,
A = 4(Ac0/√
2π)(bs/ε30)
1/2 ,
they become [77]
(Λ + 1)K − ζH + (K2 −H2)K = 0 ,
(Λ − 1)H − ζK − (K2 −H2)H = −A .(155)
Here, a time dependence ≈ exp−(iλt) has been assumed for the mode at saturation,and the quantity Λ = 4λ/ε0 has been introduced. Equations (155) is closed by the localdispersion relation, eq. (154), which becomes, together with eq. (153):
∫ ∞
−∞
H(ζ|Λ, A
)dζ = πAδTf ,(156)
which may be intended as an implicit definition of the non-linear frequency as a functionof A and parameterized by δTf , i.e., Λ = ΛNL(A|δTf ).
Non-linear saturation occurs due to the appearance of singularities in the modestructure above a critical mode amplitude, Ac, as discussed in refs. [44, 72, 73]. Infact, above Ac, it can be readily verified that a regular solution of eq. (155), whichasymptotically (|ζ| 1) matches the linear solution, no longer exists, because of theappearance of bifurcations in the mode structure, i.e., of fine scales which eventuallyyield mode saturation in the presence of finite dissipation. It is possible to explicitlyderive an analytical expression for Ac parameterized with Λ [77]
Ac1 =4
3
[1 − Λ +
(Λ2 + Λ + 1
)1/2][
Λ − 1
6+
(Λ2 + Λ + 1
)1/2
3
]1/2
; Λ < 1
Ac2 =2 (Λ − 1)
3/2
3√
3; Λ ≥ 1 .(157)
Clearly, the actual value of Ac(δTf ) is obtained by the simultaneous solution of thenon-linear dispersion relation, eq. (156), together with eq. (157). Figure 40 shows Λ =ΛNL(A|δTf ) as a function of A. The values of Ac1 and Ac2 of eq. (157) are also shown.The intersection of the Λ = ΛNL(A|δTf) curves with those representing Ac1 and Ac2provide the actual functional form of Ac(δTf ), which is shown in fig. 41. At saturation,

66 G. VLAD, F. ZONCA and S. BRIGUGLIO
-1.0
-0.5
0.0
0.5
1.0
1.5
0.1 1
Λ
A-
Ac1
-
Ac2
-
Fig. 40. – The quantity Λ = ΛNL(A|δTf ) as a function of A is shown. Different curves correspondto different values of δTf , increasing from bottom to top from δTf = 0.4 to δTf = 4.0 withincrements of 0.4. The values of Ac1 and Ac2 of eq. (157) are also shown.
0.0
0.5
1.0
1.5
2.0
0.1 1 10
Ac
-
δTf
Fig. 41. – Functional dependence of Ac(δTf ) on δTf .

DYNAMICS OF ALFVEN WAVES IN TOKAMAKS 67
the value of Ac0 is expected to be Ac0 = (√
2π/4)(ε30/bs)1/2Ac, i.e., to exhibit a (ε30/bs)
1/2
scaling. Numerical solutions of eq. (147) [77], neglecting the ballooning-interchange termand keeping only the δ%s/%0 non-linearity given in eq. (150), provide direct confirmationof the theoretically expected scalings. In fact, assuming s = 1 as a fixed parameter, fig. 42
indicate that both the ε3/20 scaling (at fixed bs) and the b
−1/2s scaling( at fixed ε0) are well
reproduced. Also the magnitudes of numerical solutions at saturation compare well withthe analytical predictions [77]: for ε0 = 0.2, s = 1.0 and bs = 1.0, the numerical saturationis Ac0 = 5.2 × 10−3; meanwhile, the analytical estimate yields Ac0 = 5.32 × 10−3.
Ac0
Ac0
0
0
Fig. 42. – Scalings of Ac0 at mode saturation, in the case s = 1. The ε3/2
0 scaling is obtained
with fixed bs = 1; the b−1/2s scaling with fixed ε0 = 0.2.
Present results allow us to give estimates of the mode amplitude at saturation. Infact, the typical solution of eq. (155) givesH ≈ K ≈ A. This, together with the definitionof H , yields, at mode saturation, ∂νδΦ ≈ (ε0/bs)
1/2s−1Ac, i.e.,
(δBr/B0) ≈ sε0b1/2s β1/2∂νδΦ ≈ ε
3/20 β1/2Ac(δTf ) .
This result confirms the fact that the efficiency of mode-mode couplings in determiningthe TAE amplitude at saturation greatly depends on the location of the linear modefrequency within the toroidal gap, i.e., on the magnitude of the function Ac(δTf), whichmay be vanishingly small [44, 72, 73, 77].

68 G. VLAD, F. ZONCA and S. BRIGUGLIO
3.3. E × B convective non-linearities. – Assume, now, that non-linear line bending
together with convective non-linearities dominate in eqs. (147) and (148). As a conse-quence of mode couplings, there will be forced non-linear oscillations in the scalar andvector potential, which may be shown to be given (in the high-n limit) [44, 72, 73] by:
δφ1,0 =c
ω0B
m
r0
∂
∂r
(δφ∗m,nδφm+1,n
),
∂
∂rδφ2m+1,2n = − c
ω0B
m
r0
(2∂
∂rδφm,n
∂
∂rδφm+1,n−
δφm,n∂2
∂r2δφm+1,n − δφm+1,n
∂2
∂r2δφm,n
);(158)
∂
∂rδA‖1,0 = − c2
ω0BvA
m
r0
∂
∂r
(δφ∗m,n
∂
∂rδφm+1,n − δφm+1,n
∂
∂rδφ∗m,n
),
δA‖2m+1,2n =c2
ω0BvA
m
r0
(δφm+1,n
∂
∂rδφm,n − δφm,n
∂
∂rδφm+1,n
).(159)
When substituted back into eqs. (147) and (148), eqs. (158) and (159) yield the followingcoupled equations for the fields δΦ(ν ± 1/2, t)
(i∂t − ν )∂ν δΦ(ν + 1/2, t) + (ε0/4)∂νδΦ(ν − 1/2, t) +
− 2m2q2s2(R0
r0
)2
βbs∂2ν |δΦ(ν − 1/2, t)|2∂νδΦ(ν + 1/2, t) =
1√2π
Ac0s
,
(i∂t + ν )∂ν δΦ(ν − 1/2, t) + (ε0/4)∂νδΦ(ν + 1/2, t) +
− 2m2q2s2(R0
r0
)2
βbs∂2ν |δΦ(ν + 1/2, t)|2∂νδΦ(ν − 1/2, t) = − 1√
2π
Ac0s
,(160)
which closely resembles eq. (151). Introducing the scaled fields
U = 8√
2mqs
(R0
r0
)(βbsε30
)1/2
δΦ(ν + 1/2, t) ,
V = 8√
2mqs
(R0
r0
)(βbsε30
)1/2
δΦ(ν − 1/2, t) ,
eqs. (160) become:
(i∂τ − ζ) ∂ζU + ∂ζV − ∂2ζ |V |2∂ζU = B ,
(i∂τ + ζ) ∂ζV + ∂ζU − ∂2ζ |U |2∂ζV = −B .(161)
Here, τ = ε0t/4 and
B = 8mq
(R0
r0
)(βbsε30
)1/2Ac0√π.
In the present case, the analysis can proceed in the same fashion as in the case of eq. (151).In particular, from eq. (161), it is possible to give estimates of the mode amplitude atsaturation, i.e.,
(δBr/B0) ≈ sb1/2s β1/2∂ζδΦ ≈ ε3/20
(r0R0
)(1
mq
)Bc(δTf ) ≈
ε5/20
mqBc(δTf ) ,(162)

DYNAMICS OF ALFVEN WAVES IN TOKAMAKS 69
where Bc(δTf ) is the value of B at saturation and can be shown to have a depencenceon δTf similar to that of the quantity Ac(δTf ) [44, 72, 73].
Incidentally, we note that the scaling of eq. (162) is valid also in the low-n limit [44,72, 73] and, in fact, in the remainder of this section we will discuss such limit. This willallow us to directly compare the analytical results, obtained with the method presentedabove and specialized to the low-n case, with those of a direct numerical solution ofthe reduced MHD equations, eqs. (180) and (183) of the appendix sects. 5
.3 and 5
.4,
respectively. More precisely, we will analyze the non-linear dynamics of n = 1 globalmodes induced by the toroidicity, namely the TAE and the RPSAE.
As already stated in the Introduction, these modes can be driven unstable by theresonant interaction of the mode with energetic ions, such as α-particles produced infusion reactions. To describe this effect properly, a kinetic description of the energeticparticle population would be necessary. With the aim of studying only the saturationmechanisms related to the MHD non-linearities, however, it will be sufficient to includea model forcing term in the reduced MHD equations in order to drive the system fromthe linear to the non-linear regime.
To separately study the dynamics of the different global modes, we need to selectivelydrive only one of them at a time. To this purpose, we can use the fact that both TAE’sand RPSAE’s eigenfunctions are localized around the gap region, whereas GAE’s haveeigenmode structures which tend to peak towards the edge of the plasma column. Thus,localizing the forcing term in different radial regions will help in driving GAE’s or gapmodes. In order to further discriminate between TAE and RPSAE, we can look at therelative phase of the Fourier components of their eigenfunctions [30]. Indeed, as shown infigs. (21) and (25), TAE’s are characterized by in phase components, whereas the (upper)RPSAE’s by out of phase ones.
The model forcing term used in eq. (183) of appendix 5.4 has Fourier harmonics:
(Fαc)m,n = %γαc
(∇2
⊥φ)m,n
,(163)
where Fαc replaces the term proportional to ∇ · ΠH, and γαc = γαc(r). In order to drivea gap mode, without destabilizing GAE’s, we choose a bell-shaped radial profile for thefunction γαc, centered at the gap position r0. In particular, the TAE will be driven bythe following choice of (Fαc):
(Fαc)1,1 = %γαc
(∇2
⊥φ)
1,1, (Fαc)2,1 = %γαc
(∇2
⊥φ)
1,1,
whereas the (upper) RPSAE is driven assigning:
(Fαc)1,1 = −%γαc(∇2
⊥φ)
2,1, (Fαc)2,1 = %γαc
(∇2
⊥φ)
2,1.
From a theoretical analysis [44] it is possible to show that two time scales exist in thesystem. The shorter scale corresponds to the oscillation at frequency ω = ωA/(2q(r0)),while the longer one is determined by the O(ε) toroidal coupling and by non-linear effects,and scales as (εωA)−1. Therefore, γαc/(εωA) is the relevant normalization of the lineardrive.
At the gap location, the “fundamental” linear components, Fm,n and Fm+1,n (where
F generically stays for φ or ψ), generate non-linear F1,0 beat components (forced by
Fm+1,n × F ∗m,n) and F2m+1,2n ones (forced by Fm+1,n × Fm,n).

70 G. VLAD, F. ZONCA and S. BRIGUGLIO
10-14
10-12
10-10
10-8
10-6
10-4
0 100 200 300 400 500
WTOTm,n
ωA t
(1,0)
(1,1)
(2,1)
(3,2)
Fig. 43. – Volume integrated energy (magnetic plus kinetic) for different Fourier components(m, n) vs. time for a non-linear simulation of an unstable driven TAE. The q-profile has aparabolic radial dependence with q(0) = 1.1 and q(a) = 1.9. The inverse aspect ratio is ε = 0.075,the density is constant % = %0 and the resistivity corresponds to S−1 = 10−5.

DYNAMICS OF ALFVEN WAVES IN TOKAMAKS 71
An example of a non-linear simulation of TAE is shown in fig. 43. We include inthe simulation the Fourier components with mode numbers (1, 0), (1, 1), (2, 1) and (3, 2).The q-profile has a parabolic radial dependence with q(0) = 1.1 and q(a) = 1.9. Theinverse aspect ratio is ε = 0.075, the density is uniform % = %0, the resistivity correspondsto S−1 = 10−5 and a small amount of perpendicular viscosity is added in the vorticityequation (eq. (183)) to improve the numerical stability in the non-linear regime, thusallowing for longer time step. After a transient phase during which the TAE emergesfrom the initial conditions, the forcing term drives the system in the linear growingphase, with a normalized linear growth rate γαc/(εωA) ≈ 1.7 × 10−1 (the smallnessof such parameter ensures that the linear drive can be treated as a perturbative one).The frequency spectrum comes out to be essentially monochromatic, thus showing thatonly a single eigenmode is driven, with frequency ω = ω0 ≈ 0.33ωA on the (1, 1) and(2, 1) components. When the non-linear modifications to the (1, 0) harmonic becomesignificant (ωAt ≥ 400), the system enters the non-linear regime, the growth slows downand saturation is eventually obtained. It has to be noted that, at the lowest order,the (1, 0) Fourier component shows a zero frequency perturbation, as expected fromtheory [44], whereas the (3, 2) perturbation exibits a frequency ω ≈ 2ω0.
In fig. 44 a blow-up of the continuous spectrum around the gap position is shown.The spectra obtained in the linear limit and at the beginning of the non-linear phase
0.30
0.32
0.34
0.36
0.38
0.40
0.66 0.68 0.70 0.72 0.74
ω /ωA
s
linear phase
non-linear phase
Fig. 44. – Blow-up of the Alfven continuum for the simulation of fig. 43. The continuous spectraobtained in the linear limit and at the beginning of the non-linear phase are compared.
are compared. As the system enters the non-linear phase, the structure of the gapshrinks, and the mode is forced to have a real frequency inside the lower continuum. Thecoupling with the KAW’s becomes stronger and the enhanced resistive damping yieldssaturation [44].

72 G. VLAD, F. ZONCA and S. BRIGUGLIO
The saturated amplitudes of the fluctuating magnetic field are predicted to scale asδBr (1,1)/B0 ∝ δBr (2,1)/B0 ∝ ε5/2 and δBr (1,0)/B0 ∝ δBr (3,2)/B0 ∝ ε3. In fig. 45 thenumerical results for such amplitudes are reported versus ε. The forcing term has beenscaled keeping the dimensionless parameter that measures the driving term, γαc/(εωA),constant. Theoretical results [44] are also shown for comparison. A best-fit analysis of the
10-5
10-4
10-3
10-2
0.08 0.1 0.2
δBr (m,n)_____
B0
ε
(2,1)(3,2)
(1,1)
(1,0)
(1,1)theory
∝ε2.5
Fig. 45. – Saturated amplitudes versus ε for the different Fourier components of the TAE. Theq profile, density and resistivity are the same as those of fig. 43.
simulation findings gives δBr (1,1)/B0 ∝ ε2.44, δBr (2,1)/B0 ∝ ε2.14, δBr (1,0)/B0 ∝ ε2.24
and δBr (3,2)/B0 ∝ ε2.92.Non-linear MHD saturation has also been found for the RPSAE. To compare the
numerical results for the saturated amplitude with the corresponding TAE scaling, alsoS−1/ε3 has been kept constant, thus fixing the relative importance of resistive dissipation.The simulation results for the saturation amplitudes, reported in fig. 46, show that theupper RPSAE saturates at a higher level than the TAE, and with a weaker ε dependence(δBr (1,1)/B0 ∝ ε1.9, δBr (2,1)/B0 ∝ ε2.1).
3.4. Kinetic non-linearities. – A complementary approach to the TAE saturation
problem consists in investigating non-linear wave-particle interactions. In the presentsection, in fact, we focus on such problem, mainly presenting the results obtained withthe Hybrid MHD-Gyrokinetic Code, although the first investigations on this topic havebeen carried out by other authors both analytically and with different numerical codes.Numerical simulations based on a Hamiltonian guiding-center representation of the par-ticle motion have been indeed performed by Wu and coworkers [67, 68] and Borba etal. [69], while Todo et al. [78] have developed a hybrid MHD-Vlasov code, which, unlikethe particle codes (Lagrangian in nature), computes the energetic-particle distributionfunction in an Eulerian frame. The results found by these authors appear to be in rea-

DYNAMICS OF ALFVEN WAVES IN TOKAMAKS 73
10-3
10-2
0.08 0.1 0.2
ε
(2,1)
(1,1)
δBr (m,n)_____
B0
Fig. 46. – Saturated amplitudes versus ε for the different Fourier components of the upper
RPSAE. The q profile and density are the same as those of fig. 43, whereas the resistivity isscaled according to S−1/ε3 = 2.37 × 10−2.
sonable agreement with those based on a theoretical model [43], which assumes thatsaturation is due to non-linear trapping of the resonant energetic particles in the poten-tial well of the wave. This model can be summarized as follows. Let Ψm,n be the wavephase for a particle at the position (r, ϑ, ϕ) at the time t:
Ψm,n ≡ ωrt−mϑ+ nϕ.(164)
In the linear case (i.e., with unperturbed particle orbits), the resonant energy exchangebetween the wave and the particle can take place only in a radial shell centered aroundthe resonant surface and qualitatively defined by the condition
∣∣∣∣dΨm,n
dt
∣∣∣∣<∼ γL,(165)
where γL is the linear growth rate of the wave.When non-linear wave-particle interactions are included, two different kind of orbits
exist: closed trajectories for particles trapped in the potential well of the wave and openones for untrapped particles. Trapped particles are subtracted to the drive, because theback-and-forth motion along the Ψm,n axis causes their energy exchange with the wave tobe averaged to zero. The separatrix between the two families of orbits corresponds to themaximum radial extension of the particle motion, which can be shown to be proportionalto the square root of the wave amplitude. Thus, as a linear instability grows, the growthrate of the wave becomes weaker, since more and more particles become trapped. Whenthe separatrix width becomes of the same order of the width of the resonant shell defined

74 G. VLAD, F. ZONCA and S. BRIGUGLIO
by eq. (165), the wave eventually saturates. This condition corresponds to a relationshipbetween the saturation amplitude of the fluctuating radial magnetic field and the lineargrowth rate. Berk and Breizmann found [43], as it straightforwardly follows from theprevious discussion,
δBrB0
∝ γ2L .(166)
Here, it is worth to recall that particle effects are treated perturbatively: they affectthe growth rate of the wave, but have no influence on the real frequency and the modestructure, which are thought to be fixed and given by the dynamics of the core plasma.This approach is fully consistent with that of refs. [67, 68, 69], which, in fact, obtainresults in agreement with eq. (166). From the discussion of the previous section, we expectthat this perturbative approach is indeed adequate for investigating the saturation of thelow-γL gap modes (TAE’s) or their kinetic counterpart (KTAE’s). The results obtainedin ref. [78] in the framework of fully self-consistent (non-perturbative) simulations of thegap-mode regime do not significantly depart from the findings of the model proposedin ref. [43] and confirm this expectation. On the contrary, we have to presume thatthe (high-γL) EPM’s, for which particle dynamics plays an intrinsically non perturbativerole, can be characterized by a completely different phenomenology, thus requiring a morecomplete approach. This issue is further discussed in the following, by comparing thefindings of self-consistent (i.e., full MHD-gyrokinetic) simulations with those obtainedfrom perturbative non-linear studies, which retain the effects of non-linear wave-particleinteractions but neglect the possible modifications of the mode structure and frequency.
3.4.1. Gap-mode saturation
The maximum amplitude of the radial component of the fluctuating magnetic field, ob-tained at different values of βH(0) is plotted, in fig. 47, versus the corresponding valuesof the linear-phase growth rate γL. Full boxes refer to perturbative simulations, emptyboxes to self-consistent ones. The fair agreement between the two sets of results, allrelative to low-γL gap modes, confirms the validity of the perturbative approach for thisregime. Saturation can be attributed to the trapping of resonant particles, discussedabove. This can be easily recognized by examining the findings of a typical perturbativesimulation in such regime. Figure 48 shows the time behaviour of the mode amplitudefor βH(0) = 0.08, with a given background dissipation represented by a damping rateγD = 0.01ωA, and the other parameters as in the simulations considered in fig. 36. Suchcase corresponds, in fig. 47, to the point relative to γL = 0.03ωA. After the initiallinear-growth phase, the non-linear growth rate progressively decreases and saturation iseventually reached. The time evolutions of the radial coordinate r and the parallel veloc-ity U are reported in fig. 49(a) and (b), respectively, for a particle initially close to theresonance condition – eq. (165) – with the m = 2 poloidal component. It can be notedthat during the linear phase (ωAt < 150) the particle orbit is almost unperturbed, theoscillation of the particle radial position being due to the effect of magnetic drifts, whilethe significant decrease of the non-linear growth rate coincides with a strong modificationof the original linear orbit. The trajectories in the (Ψ2,1, r) plane, for the same particle,are shown in fig. 50, for the time intervals 0 < ωAt < 284 (a) and 264 < ωAt < 560 (b)(note that the two intervals are slightly overlapping). For the sake of clarity, the Ψ2,1
axis is mapped onto the interval 0 < Ψ2,1 < 4π. It is evident that, in the first interval(linear growth of the wave), the trajectory corresponds to that of a passing particle,

DYNAMICS OF ALFVEN WAVES IN TOKAMAKS 75
10-5
10-4
10-3
10-2
0.01 0.1
γL/ω
A
perturbative
self-consistent
δBr (1,1)_____
B0
Fig. 47. – Maximum amplitude of the fluctuating radial magnetic field versus linear growth ratefor perturbative (full boxes) and self-consistent (empty boxes) n = 1 simulations, performed atdifferent values of βH(0), with the other parameters as in figs. 34 and 36.

76 G. VLAD, F. ZONCA and S. BRIGUGLIO
6
4
2
0 200 400 600 800
ωA t
ln A (t)
Fig. 48. – Time evolution of the mode amplitude A(t) for a perturbative non-linear simulationwith γD = 0.01 ωA, βH(0) = 0.08, and the other parameters as in fig. 36.
0 200 400 600 800
ωA t
0 200 400 600 800
ωA t
1.0
1.20.8
1.0
0.8
0.6
0.6
0.4
0.2
a) b)r/a U/vH
Fig. 49. – Time evolution of the radial coordinate (a) and the parallel velocity (b) of a nearly-resonant (with respect to the component m = 2) energetic particle, for the case of fig. 48. Duringthe linear-growth phase the orbit remains almost unperturbed. The saturation phase coincideswith a significant alteration of the particle motion.

DYNAMICS OF ALFVEN WAVES IN TOKAMAKS 77
0.8
0.7
0.6
0.5
0 2π 4π
r/a
0.8
0.7
0.6
0.5
r/a
Ψ2,1
0 2π 4πΨ2,1
a) b)
Fig. 50. – Orbit in the plane (Ψ2,1, r), for the same particle as in fig. 49, in the time intervals0 < ωAt < 284 (a) (linear growth) and 264 < ωAt < 560 (b) (non-linear saturation). The Ψ2,1
axis is mapped onto the interval 0 ≤ Ψ2,1 < 4π. The particle is initially passing, but becomestrapped as the mode reaches a certain amplitude.
whilst, when the mode amplitude reaches a certain level, the particle becomes trapped,stops driving the mode and, in fact, contributes to its saturation.
The results of the self-consistent simulations allow us to draw, as expected, similarconclusions. In fig. 51, the time evolution of the poloidal harmonics of the total fluctu-ating energy for the KTAE obtained at βH(0) = 0.02 (corresponding to γL/ωA = 0.023)is plotted. Figure 52 shows, for the same case, the normalized energetic-particle line-density profile (∝ rnH(r)) at two different times: the solid line refers to ωAt = 30,during the linear growth of the mode; the dashed line to ωAt = 480, after saturationhas been reached. No appreciable modification in the density profile can be observed,consistently with the conjecture of “soft” trapping mechanism.
Two different sub-regimes can be distinguished with respect to the scaling of thesaturated amplitude. In the first sub-regime, at very low values of γL, a dependenceδBr|sat ∝ γαL, with α<∼ 4, is obtained. Note that such a dependence differs from that [43]reported in eq. (166) and obtained also in refs. [67, 68, 69]. It is possible to guess that thefinite character of the growth rates considered here does not allow us a straightforwardcomparison with the vanishing-γL approach of ref. [43]. The second sub-regime canbe identified at slightly higher (although still low) values of γL. The γL dependence ofδBr|sat tends to become weaker as the radial width of the resonance region (proportionalto γL) exceeds the (finite) radial width of the mode, and the fraction of resonatingparticles is consequently cut off. Saturation is then reached at almost constant values ofδBr|sat, irrespectively to the value of γL.
3.4.2. EPM saturation
On the basis of the results presented in sect. 2.6.3 we know that EPM saturation cannot
be investigated within a perturbative approach and that it requires self-consistent simu-lations. Figure 53(a) shows the time evolution of the total energy for such a simulation,with βH(0) = 0.04, while the contour plot of the line-density in the (t, r) plane is rep-

78 G. VLAD, F. ZONCA and S. BRIGUGLIO
10-5
10-6
10-7
10-8
(1,1)
(2,1)
100 200 300 400 5000
WTOTm,n
ωA t
Fig. 51. – Time evolution of the poloidal harmonics of the total fluctuating energy for a n = 1,βH(0) = 0.02 self-consistent non-linear simulation.

DYNAMICS OF ALFVEN WAVES IN TOKAMAKS 79
1.5
1.0
0.5
0 0.25 0.50 0.75 1.00
r n (a. u.)
r/a
Fig. 52. – Energetic-particle line-density profile, for the case shown in fig. 51, at ωAt = 30(solid line), during the linear growth of the mode, and at ωAt = 480 (dashed line), after thatsaturation has been reached. No appreciable modification can be observed.
resented in fig. 53(b). We note that, unlike the case examined in the previous section,saturation occurs because of a sudden displacement of the energetic-particle population(the instability source). This displacement is also evident in fig. 54, which shows theline-density profile before (solid line) and after (dashed line) saturation, and can be at-tributed to the secular drift that affects the radial motion of energetic particles. Such adrift can be observed, for a particle with initial radial coordinate r = 0.4 a, in fig. 55.
The secular radial drift induced on the circulating particles in resonance with thewave is analogous to that discussed, for the fishbone mode, in ref. [79]. In particular, it isevident, from fig. 53, that the secular motion becomes larger at larger mode amplitude,in agreement with the process called “mode-particle pumping” in ref. [80]. We musthowever remind that fishbone oscillations have n = 1 and they are typically drivenunstable by resonant interactions with magnetically-trapped energetic particles, whereasthe most unstable EPM’s are characterized by larger n values, and those described hereare destabilized by circulating energetic ions.
The fact that the secular radial motion becomes negligible for particles located atradial positions where the mode amplitude is small causes the formation of a sharpenergetic-particle density gradient at the plasma boundary. A consistent description ofappreciable particle losses through the plasma boundary would then require to remove thefixed-boundary constraint and include “external” poloidal harmonics (with m/n > qa),coupled to the fundamental m = 1, 2 EPM components. We also note that the inclusionof a significant background dissipation in the model and of a source term in the Vlasovequation would yield “bursting” cycles of the EPM instability and of the associatedparticle displacement [79, 81] instead of the steady-state saturation described here.

80 G. VLAD, F. ZONCA and S. BRIGUGLIO
10-2
10-3
10-4
10-5
10-6
10-7
10-8
0 20 40 60ωA t
0 20 40 60ωA t
(1,1) a)
(2,1)WTOTm,n
1.00
0.75
0.50
0.25
b)
r/a
Fig. 53. – Time evolution of the poloidal harmonics of the total energy (a), and contour plot ofthe line-density in the (t, r) plane (b) for a self-consistent simulation with βH(0) = 0.04 (EPMregime). Saturation occurs because of a macroscopic displacement of the energetic-particlepopulation.

DYNAMICS OF ALFVEN WAVES IN TOKAMAKS 81
1.5
1.0
0.5
0 0.25 0.50 0.75 1.00
r/a
r n (a. u.)
Fig. 54. – Line-density profile at ωAt = 20 (solid line), during the linear growth of the mode, andat ωAt = 40 (dashed line), after saturation, for the simulation shown in fig. 53. A macroscopicdisplacement of the source of instability is observed.
-1.0
-0.5
-1.0 -0.5
0
0
0.5
0.5
1.0
1.0
Z/a
R - R0a
Fig. 55. – Poloidal-plane projection of a typical energetic-particle orbit in the simulation offig. 53. The initial radial coordinate is r = 0.4 a.

82 G. VLAD, F. ZONCA and S. BRIGUGLIO
Particle redistributions associated to EPM’s can be appreciated, from a quantitativepoint of view, in fig. 56, which shows the fraction of the global energetic-particle popu-lation displaced out of a fixed radial position (r = 0.7a, in this case). Results relative to
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.00 0.02 0.04 0.06 0.08 0.10
(∆N/N)r>0.7a
βH (0)
n = 4
n = 1
Fig. 56. – Fraction of the global energetic-particle population displaced out of r = 0.7a inself-consistent simulations with toroidal number n = 1 (full boxes) and n = 4 (empty boxes).
simulations with toroidal number n = 1 (full boxes) and n = 4 (empty boxes) are plottedfor different values of βH(0). These findings forbid to generalize to the whole family ofAlfven modes the results concerning gap modes, concluding, on the basis of perturbativetreatments, that such family has little influence on the transport and confinement ofenergetic particles.
The inclusion of MHD non-linearities is not expected to appreciably modify theseresults. Indeed, it has been shown [44, 72] that such non-linearities mainly alter the shearAlfven continuum in the region close to the gap. Such modification can influence thecontinuum damping of gap modes and, eventually, yield their saturation. The existenceof EPM’s and their dynamics are weakly affected by the presence of the gap; thus, wecan guess that the EPM saturation mechanism, described here, remains effective even ifthe MHD non-linear terms are fully taken into account in the simulation. This is con-firmed by the results shown in figs. 57 to 60, where two simulations are compared, withand without MHD non-linearities, respectively. No significant difference can be appreci-ated for both the saturation level (see figs. 57a and 59a) and the particle-displacementmechanism (see figs. 57b and 59b, as well as figs. 58 and 60).
Finally, we note that the βH threshold for the deterioration of confinement propertiesis characterized by a strong correlation with the EPM destabilization (cf. figs. 34 and 38).Thus, a relevant dependence on the toroidal mode number is also expected, since high-n

DYNAMICS OF ALFVEN WAVES IN TOKAMAKS 83
a) (2,1)
(1,1)
0.25
0.50
0.75
1.00
r/ab)
WTOTm,n
ωA t
ωA t
Fig. 57. – Time evolution of the n = 1 poloidal components of the total energy (a), and contourplot of the line-density in the (t, r) plane (b) for a simulation analogous to that shown in fig. 53,but including the MHD non-linearities. An artificial viscous term has been introduced in thefluid equations and a larger resistivity value has been fixed (S−1 = 10−3) in order to preventnumerical instabilities due to the explicit character of the non-linear MHD terms.

84 G. VLAD, F. ZONCA and S. BRIGUGLIO
1.5
1.0
0.5
0 0.25 0.50 0.75 1.00r/a
r n (a. u.)
Fig. 58. – Initial (solid line) and final (dashed line) line-density profile for the simulation shownin fig. 57.
EPM’s are the most unstable ones. Indeed, while in the n = 1 case such a thresholdappears to be unrealistically high (with the parameters considerd in this paper, βH(0)th ≈0.024), for n = 4 and n = 8 we find βH(0)th ≈ 0.011 and βH(0)th ≈ 0.006, respectively(cf. fig. 39). EPM’s with n>∼ 10 have been predicted to be unstable in plasmas close toignition conditions [58, 82, 83]. High resolution self-consistent simulations are required tocheck whether the qualitative features of EPM dynamics, discussed here, are preservedin such high-n regime and whether the βH threshold for confinement deterioration ofcharged fusion products may be significantly low for realistic ignited-plasma conditions.
4. – Discussions and Open Problems
The present review article has dealt with both linear stability properties of shearAlfven waves in tokamaks and their non-linear dynamic evolution. Essentially, the inter-est in this problem is given by the consequences that these modes may have on energeticparticle confinement and, thus, by their potential detrimental effect on the ignition mar-gins of future experimental devices as ITER.
From the overall discussion on the linear stability of the Alfven spectrum, given insect. 2, it can be stated, with reasonable confidence, that the present understanding ofthis issue is thorough and complete, at least qualitatively. In fact, the various numericalcodes, available at present, make it possible to precisely compute the linear spectrum ofAlfven eigenmodes in realistic tokamak geometries, e.g., that of ITER, up to toroidalmode numbers n<∼ 10. Nonetheless, analytical investigations of the most unstable mode
numbers – in the range 10<∼ n<∼ 50 for ITER – are still required due to memory limitationof present computer facilities. Asymptotic analyses, of the type discussed in section 2
.5,

DYNAMICS OF ALFVEN WAVES IN TOKAMAKS 85
a) (2,1)
(1,1)
0.25
0.50
0.75
1.00
r/a
b)
ωA t
ωA t
WTOTm,n
Fig. 59. – Same as fig. 57, without MHD non-linearities. No appreciable difference is observedwith respect to the saturation mechanism in the two cases. Note that the simulation differsfrom that of fig. 53 only for the inclusion of a viscous term and the different resistivity value.

86 G. VLAD, F. ZONCA and S. BRIGUGLIO
1.5
1.0
0.5
0 0.25 0.50 0.75 1.00r/a
r n (a. u.)
Fig. 60. – Initial (solid line) and final (dashed line) line-density profile for the simulation shownin fig. 59.
offer extremely useful tools in this respect, although their advantage becomes quite ques-tionable if they are to be applied to investigations of realistic plasma equilibria, forwhich these analytic-theoretical tools become difficult to handle and even to implementnumerically. Thus, despite the present fundamental understanding of Alfven eigenmodestability in tokamaks, there still exist limitations in the capability of predicting the sta-bility properties of these modes in a real device [84].
Besides the problems related to the linear stability of Alfven eigenmodes in tokamaks,a separate consideration is necessary for EPM’s, which are not eigenmodes of the thermalplasma and whose stability properties, thus, deserve a specific attention. This is true notonly because the energetic particle population must be treated non-perturbatively, i.e.,on the same footing of the thermal plasma (cf. sect. 2
.5.5), but also because EPM’s, as it
was recently emphasized, for sufficiently high pressure gradients of the thermal plasma orenergetic particle density [42, 63, 85], smoothly connect to the Kinetic Ballooning Mode(KBM) branch [86, 87] resonantly excited by energetic particles. These modes have beenobserved experimentally and have been given the name of Beta induced Alfven Eigen-modes (BAE) [88, 89], since their frequency is near (not necessarily inside) the betainduced frequency gap in the shear Alfven continuum (0 < (ω/ωA)2<∼ Γβ, with Γ beingthe ratio of specific heats: cf. sect. 2). It has been also demonstrated that, when theAlfven mode frequency becomes so low to be comparable with the ion diamagnetic fre-quency and to the thermal ions transit frequency (≈ vti/(qR0)), eigenmodes of the shearAlfven branch may be excited even in the absence of an energetic particle drive [90]. Allthese low-frequency Alfven modes may have serious detrimental effects on the energeticparticle confinement [88], analogously to what happens for the higher frequency modesdiscussed in the present review article. Nonetheless, the study of the former instabilities

DYNAMICS OF ALFVEN WAVES IN TOKAMAKS 87
has not quite received the same attention as the latter, and, thus, they have not beenanalyzed here. However, it is clear that further studies on this issue are needed, due toits possible impacts on the performances of reactor relevant plasmas.
The present understanding of non-linear dynamic properties of Alfven modes intokamaks is, unlike for the fundamental insight into their linear stability, still not en-tirely satisfactory. The most widely accepted picture of non-linear saturation of Alfveneigenmodes is a single resonance local theoretical model [43], which assumes that sat-uration is due to non-linear trapping of the resonant energetic particles in the poten-tial well of the wave. The saturation level, in this case, can be shown to scale asδBr/B0 ∝ (a/ρLH)(γL/ω)2 ∝ n(γL/ω)2; thus, it is expected to be important near thresh-old and for relatively small mode numbers. For larger growth rates and/or mode numbers,the saturation mechanism due to wave-particle trapping is eventually substituted by that
due to mode-mode couplings, which, e.g., predicts δBr/B0 ≈ (1/n)ε5/20 in the case of
E × B convective non-linearities [44]. In all these cases, however, the expected particlelosses are neglible, unless a threshold in the mode amplitude for stochasticity of particleorbits in phase space is reached, which can be estimated by the Chirikov criterion of reso-nance overlapping [91]. Meanwhile, both wave-particle trapping and mode-mode couplingbased models, discussed in the present review article, are single resonance models and,thus, intrinsically not applicable to a multi resonance scenario with stochastic particleorbits. In this respect, the first work that analyzes gap mode saturation accounting forglobal mode structures in the high-n case is ref. [71], which yields δBr/B ≈ ε20(γL/ω)1/2
for saturation via frequency cascading, due to non-linear ion Landau damping of low-frequency waves. In any event, a general understanding of non-linear gap mode dynamicsis, at present, still lacking. This fact, together with the above mentioned uncertainties inpredicting the linear Alfven spectrum in a realistic plasma equilibrium, makes it impos-sible, to date, to forecast the level of energetic particle losses in a next generation devicelike ITER. However, it can be argued that the typical ITER condition – (ρLH/a) 1– should play a beneficial role in keeping energetic particle losses much smaller than inpresent experimental machines.
As in the case of linear stability, the non-linear dynamics of EPM need a separatediscussion. As shown in the present review article and in previous published papers [85,92], the saturation mechanism of these modes is essentially different from that of gapmodes and it is crucially related to macroscopic redistributions of the energetic particlesource. As expected, this novel behavior is related to the non-perturbative contributionof particle dynamics to both linear and non-linear evolution of EPM’s. This remarkalso explains why, as shown in sect. 3
.4, the threshold in fast particle energy density
(βHth) for EPM destabilization coincides with the threshold for macroscopic particleredistribution. From the present understanding, we expect that βHth decreases withn – as it is indeed observed in numerical simulations [85, 92] – eventually reaching aminimum for n = nmax. Due to memory limitations, numerical simulations have not yetreached high enough mode numbers to show the minimum threshold at nmax. However,from high-n one-dimensional linear gyrokinetic simulations [63] (cf. sect. 3
.4), one can
predict nmax ' r0/(qρLH) (r0 being the radial location of the mode) with βH(0)th '(0.05/q2)(LpHth/R0) and LpHth representing the typical scale length of βH at threshold.Future investigations need to confirm this theoretically expected values via global non-linear EPM numerical simulations.
In the analyses of non-linear dynamics of Alfven modes in tokamaks, the aspectsinvolving low-frequency waves – in the range of thermal ion diamagnetic and transit fre-

88 G. VLAD, F. ZONCA and S. BRIGUGLIO
quencies – is still untouched. Nonetheless, this topic remains one of the most interestingfrom a theoretical point of view and one of potentially great practical impact. In fact,since excitations of these low-frequency modes are possible even in the absence of anenergetic particle drive [90], their non-linear dynamics may affect the energetic particleconfinement properties as well as those of the thermal plasma.
In summary, since the first works on excitations of Alfven modes in tokamaks byenergetic particle populations [7, 8, 9], the theoretical understanding of this problemhas made impressive advances to such an extent that, at present, the challenge is to becapable of precisely predicting the properties of Alfven wave spectra and their possibleconsequences on particle and energy confinement in real devices. There are many openproblems along this route, and we may look forward to new exciting and very likelycontroversial results.

DYNAMICS OF ALFVEN WAVES IN TOKAMAKS 89
5. – Appendices
In the following, we will summarize the main features of the numerical instrumentsused in our analysis. In particular, the equilibrium code CHEASE [93] and the linearstability one, MARS [94, 95], will be briefly described. Then, the derivation of the O(ε3)-reduced MHD model is presented, along with the Hybrid MHD-Gyrokinetic Code [72],which is based on such model and allows us to investigate the effects of a population ofenergetic ions on the stability and non-linear dynamics of shear Alfven modes.
5.1. CHEASE. – Numerical equilibria in toroidal geometry may be calculated using
the CHEASE code [93]. The MHD equilibrium equations read
∇P0 =1
cJ0 × B0 ,
∇× B0 =4π
cJ0 ,(167)
∇ · B0 = 0 .
Assuming axisymmetry, the magnetic field can be represented as
B0 = F (ψ)∇ϕ+R0∇ψ ×∇ϕ ,(168)
where ϕ is the ignorable toroidal angle, ψ is the poloidal magnetic flux function and R0
is the major radius of the torus, measured at the geometric axis of the plasma vacuumchamber. For the axisymmetric equilibria we are considering, the pressure P0 and thefunction F depend on ψ only (P0 = P0(ψ), F = F (ψ) ≡ RB0ϕ). Substituting eq. (168)into eqs. (167) leads to the elliptic second-order non-linear partial differential Grad-Shafranov equation [45]
∆∗ψ = 4πR2
R20
dP0
dψ+
1
R20
FdF
dψ,(169)
which completely describes the two-dimensional (2-D) toroidal equilibria once the freefunctions P0(ψ) and F (ψ) are given. The elliptic operator ∆∗ is given by
∆∗ψ = R2∇ ·(∇ψR2
)= R
∂
∂R
(1
R
∂ψ
∂R
)+∂2ψ
∂Z2.(170)
The CHEASE code represents ψ by Hermite cubic elements, allowing very accurateequilibrium calculations with modest mesh sizes. The poloidal angle χ is determinedonce fixed the functional dependence of the Jacobian J = (∇ψ × ∇ϕ · ∇χ)−1, which inthe CHEASE code has the form
J = C(ψ)Rα|∇ψ|µ ,
where α and µ are integers. C(ψ) is determined by demanding that χ increases by 2πper poloidal turn. The choice of α = 2 and µ = 0 has been done in the present paper.
5.2. MARS. – The MHD linear stability in general toroidal geometry can be in-
vestigated using the full, toroidal, resistive-MHD code MARS [94, 95], which uses theequilibrium calculated by the CHEASE code as input. MARS solves the linear limitof the MHD eqs. (1- 7) with eq. (4) replaced by the resistive version, eq. (10). Theproblem is solved in flux coordinates (s, χ, ϕ), where s is a radial coordinate (as, e.g.,

90 G. VLAD, F. ZONCA and S. BRIGUGLIO
s = (1 − ψ/ψaxis)1/2, with s = 0 on the axis of the plasma column and s = 1 at the
plasma boundary or, similarly, s = (V (ψ)/Vtot)1/2 where V (ψ) is the volume enclosed
inside the magnetic surface labeled by the value ψ and Vtot is the total plasma volume), χis a poloidal angle-like variable (see appendix sect. 5
.1) and ϕ is the toroidal angle. As al-
ready stated in sect. 2, in general toroidal geometry the poloidal mode number is no morea good “quantum number”, because of the 2-D equilibrium dependence, that is, differentpoloidal harmonics are coupled together. The perturbed variables in MARS are expandedusing Fourier series in the poloidal (χ) and toroidal (ϕ) angles and a generalization offinite elements in s [96]. The dependent variables are the Fourier harmonics of plasmapressure and contravariant (s, χ, ϕ)-components of velocity, perturbed magnetic fieldand current densities, the latter two multiplied by the jacobian J . After discretization,the linearized resistive MHD system takes the form of a complex eigenvalue problem:
AX = λBX ,(171)
where A and B are the matrices of the coefficients of MHD-force and inertial operatorrespectively, λ ≡ γ − iωr is the complex eigenvalue (a dependence ∝ exp(λt) is assumedfor the perturbed quantities; γ is the growth rate and ωr is the real frequency), and X
is the vector of the dependent variables. The eigenvalues are found by a generalizationof the inverse vector iteration to complex eigenvalues and eigenvectors [97]. In order toconverge to the closest eigenvalue in the complex plane to a certain guess λ0, eq. (171)is first rewritten as
(A− λ0B)X = (λ− λ0)BX .(172)
This allows to apply the following standard iteration scheme
(A− λ0B)X(n) = BV(n−1) ,(173)
V(n) =X(n)
||X(n)||.(174)
The n-th approximation to the eigenvalue is then given by
λ(n) = λ0 +1
||X(n−1)||(X∗
(n−1),X(n−1))
(X∗(n),X(n−1))
,(175)
where (Y∗,Z) is the inner product of the complex conjugate of vector Y with vector Z
and ||Z|| ≡ (Z∗,Z)1/2.Part of the same machinery of the eigensolver can be easily adapted to solve the
initial value (rather than the eigenvalue) linear problem, which formally can be recoveredfrom eq. (171) by replacing λ with a time derivative ∂t acting only on the vector X. Thetime-discretized evolution equation takes indeed the form
(A− 1
∆tB)Xt = − 1
∆tBXt−∆t ,(176)
which has the same structure of eq. (173) under the conditions of identifying λ0 with1/∆t, redefining the matrix on the r.h.s. and skipping the renormalization step, eq. (174).
In this paper only fixed-boundary modes, that is, modes characterized by normalcomponents of the perturbed magnetic and velocity fields equal to zero at the plasmaboundary, are considered, although the code allows the user to handle also a vacuumregion surrounding the plasma.

DYNAMICS OF ALFVEN WAVES IN TOKAMAKS 91
5.3. Order-ε3 reduced MHD. – We introduce, here, a simplified version of the resis-
tive MHD equations, which will be useful later for the non-linear study of the Alfvenmodes, greatly reducing the complexity of the problem. We start from the resistive MHDequations (1-7), with the Ohm’s law generalized by eq. (10).
Since tokamak plasmas are characterized by values of the safety factor q(r) ≈(rBϕ)/(RBϑ) ≈ O(1) (Bϕ and Bϑ are, respectively, the toroidal and poloidal componentof the magnetic field) and inverse aspect ratio ε = a/R0 much lower than unity, MHDequations can be simplified by expanding in powers of ε. This procedure has been widelyused, since the first paper of Strauss [98], both for analytical and numerical work. Atthe leading order in ε, O(ε2), and considering the low-β approximation, β ≈ O(ε2), thereduced-MHD equations describe the plasma in the cylindrical approximation. Toroidalcorrections enter the equations at the next order in the inverse aspect ratio expansion.The derivation of these equations has been described in detail in ref. [99] and is onlybriefly reported here.
Following the low-β tokamak ordering, it is possible to write
v⊥vA
≈ B⊥
Bϕ≈ B/B · ∇
∇⊥≈ O(ε) ,
vϕvA
≈ ∇ · v⊥
vA/a≈ ∇(RBϕ)
Bϕ≈ O(ε2) ,
∂
∂t≈ vA
R.
Here, a cylindrical-coordinate system (R,Z, ϕ) has been used, and the subscript ⊥ de-notes components perpendicular to ∇ϕ. The magnetic field can be written as
B =(F0 + F
)∇ϕ+R0∇ψ ×∇ϕ+O(ε3Bϕ) ,(177)
where ψ is the poloidal magnetic flux function, F0 = R0B0, B0 is the vacuum (toroidal)magnetic field at R = R0, and F ≈ O(ε2F0) is given, at the leading order, by equilibriumcorrections. Substituting eq. (177) and Ohm’s law, eq. (10), into Faraday’s law, eq. (5),we obtain
R0∂ψ
∂t∇ϕ+ c
(ηJ − 1
cv × B
)= −c∇φ+O(ε4vABϕ) ,(178)
where φ is the scalar potential. Taking the cross product by ∇ϕ, eq. (178) can be solvedwith respect to v⊥ :
v⊥ = − cR2
R0B0∇φ×∇ϕ+O(ε3vA) .(179)
Equation (179) states that, at the lowest order, the perpendicular velocity is given bythe E×B drift. Then, taking the ∇ϕ component of eq. (178), the following equation forthe evolution of the poloidal magnetic flux function is obtained:
∂ψ
∂t= − cR2
R0B0∇ψ ×∇ϕ · ∇φ− c
R0
∂φ
∂ϕ+ η
c2
4π∆∗ψ +O(ε4vABϕ) ,(180)
with the Grad-Shafranov operator ∆∗ defined by eq. (170).Upon applying the operator ∇ϕ · ∇×R2. . . to the momentum equation, eq. (2), the
following equation for the evolution of the scalar potential is obtained:
%
(D
Dt− 2c
R0B0
∂φ
∂Z
)∇2
⊥φ+ ∇% ·(D
Dt− c
R0B0
∂φ
∂Z
)∇φ =
− B0
4πcB · ∇∆∗ψ − B0
cR0∇ ·(R2∇P ×∇ϕ
)+O(ε4%
v2ABϕa2c
) ,(181)

92 G. VLAD, F. ZONCA and S. BRIGUGLIO
where
% =R2
R20
% ,D
Dt=
∂
∂t+ v⊥ · ∇ ,
∇2⊥ ≡ 1
R
∂
∂RR∂
∂R+
∂2
∂Z2.
Note that, both in eq. (180) and eq. (181), vϕ and F enter only at the fourth order in ε.In eq. (181) the dependence on the density gradient has been retained explicitly. Withthe particular choice of the mass density %R2 = %R2
0 = const, and using the definition ofv⊥ given in eq. (179), the continuity equation, eq. (1), is satisfied up to the third order.The pressure equation becomes
DP
Dt= O(ε4
vAB2ϕ
a) .(182)
5.4. Hybrid MHD-kinetic models. – In order to include in this model the effects on an
energetic-ion population, we can take advantage from the fact that the energetic particledensity is typically much smaller than the bulk plasma density. The following orderingcan then be adopted:
nHni
≈ O(ε3) ,THTi
≈ O(ε−2) ,
where nH (ni) and TH (Ti) are the energetic particle (bulk ion) density and temperaturerespectively. Thus, the following ordering for the ratio of the energetic to bulk ion betafollows:
βHβi
≈ O(ε) ,
It can be shown [100] that, making use of the above ordering, the MHD momentumequation is modified by a term which represent the perpendicular component of thedivergence of the energetic-particle stress tensor ΠH (in ref. [100] an alternative, equiv-alent form in which the electric current associated to the energetic ions appears, insteadof the energetic-particle stress tensor, is also derived). Thus, the O(ε3) equation for theevolution of the scalar potential is modified as follows
%
(D
Dt− 2c
R0B0
∂φ
∂Z
)∇2
⊥φ+ ∇% ·(D
Dt− c
R0B0
∂φ
∂Z
)∇φ =
− B0
4πcB · ∇∆∗ψ − B0
cR0∇ ·[R2 (∇P + ∇ · ΠH) ×∇ϕ
]+O(ε4%
v2ABϕa2c
) .(183)
In order to close the set of reduced MHD eqs. (180) and (183), the hot-particlestress-tensor components can be evaluated by directly calculating the appropriate velocitymoment of the distribution function for the particle population moving in the perturbedfields ψ and φ (see appendix sect. 5
.5).
5.5. Hybrid MHD-kinetic code. – In this section, we describe the code that solves
the O(ε3) reduced MHD model, in the limit of zero bulk-plasma pressure. In such limit,only eqs. (180) and (183) need to be solved. As a boundary condition, we take a rigidconducting wall at the plasma edge. The numerical tool [61, 72, 73] used to solve theO(ε3) model is based on a field solver originating from an existing O(ε2) code [101]. Suchfield solver uses toroidal coordinates (r, ϑ, ϕ), finite differences in the radial direction(r) and Fourier expansion in the poloidal (ϑ) and toroidal (ϕ) directions. The coupled

DYNAMICS OF ALFVEN WAVES IN TOKAMAKS 93
equations for the Fourier components of the magnetic and velocity stream functions ψ andφ are advanced in time using a semi-implicit algorithm, where all the linear terms thatcouple with the cylindrical part of the equilibrium (i.e., the component having poloidaland toroidal mode numbers (m,n) = (0, 0)) are treated implicitly. The non-linear terms,the terms which arise from the toroidal corrections to the cylindrical approximation andthe contributions of the energetic particles (the term containing ∇·ΠH in eq. (183)) aretreated explicitly. Moreover, only the Fourier components in a half plane of the (m,n)space are evolved, the ones that fall in the other half plane being recovered from thereality condition of the solution:
ψ−m,−n(r, t) = ψ∗m,n(r, t) , φ−m,−n(r, t) = φ∗m,n(r, t) .(184)
The equilibrium configuration used for numerical simulations can be exactly calcu-lated to the desired order in ε, starting from the expression for the equilibrium toroidalcurrent
∆∗ψeq = −4π
c
R
R0J0ϕ ,(185)
and expanding ψeq in powers of ε,
ψeq(r, ϑ) = ψeq0 (r) + ψeq1 (r, ϑ) +O(ε2ψeq0 ) .
In the toroidal coordinate system (r, ϑ, ϕ) the Grad-Shafranov operator can be expressedas
∆∗ =1
r
∂
∂r
(r∂
∂r
)+
1
r2∂2
∂ϑ2− 1
R
(cosϑ
∂
∂r− sinϑ
r
∂
∂ϑ
),
with R = R0 + r cosϑ. To the leading order, that is in the cylindrical approximation,eq. (185) is given by
1
r
d
dr
(rdψeq0dr
)= −4π
cJ0ϕ[ψeq0 (r)] ,(186)
yieldingdψeq0dr
= −B0
R0
r
q(r),
which can be integrated assigning ψeq0 (a) = 0 and q(r), the safety factor in the cylindrical(O(ε2)) approximation (q(r) = rB0ϕ/(R0B0ϑ)). Equation (186) gives the symmetric(m = 0, n = 0) Fourier component of the poloidal magnetic flux function ψeq. To thenext order in ε, eq. (185) yields
1
r
∂
∂r
(r∂ψeq1∂r
)+
1
r2∂2ψeq1∂ϑ2
− 1
R0cosϑ
dψeq0dr
=
−4π
cψeq1
d
dψeq
(R
R0J0ϕ
)∣∣∣∣ψeq=ψeq
0
.(187)
Equation (187) admits solutions of the form
ψeq1 (r, ϑ) = ψeq1 (r) cos ϑ = ∆(r) cos ϑdψeq0dr
,(188)
where we have introduced the so-called Shafranov shift ∆. Substituting eq. (188) intoeq. (187) and using the leading order solution of eq. (186), the following equation for the

94 G. VLAD, F. ZONCA and S. BRIGUGLIO
Shafranov shift ∆ is obtained:
1
r
d
dr
[r
(dψeq0dr
)2d∆
dr
]− 1
R0
(dψeq0dr
)2
= 0 .(189)
Equation (189) can be integrated assigning the radial derivative of the Shafranov shiftat the center ∆′(0) = 0 (regularity condition) and ∆(a) = 0 (corresponding to ψeq = 0on the rigid conducting wall), to obtain ∆(r). The substitution of ∆(r) into eq. (188)allows us to obtain the first-order (1, 0) Fourier component of the magnetic flux functionψeq , thus completing the equilibrium solution at the desired order. Note that, once fixedr and ϑ, the quantity ∆(r) corresponds to the shift, with respect to the center of thepoloidal cross section, of the geometric center of the magnetic surface labelled by thevalue ψeq(r, ϑ). Such a shift causes shear Alfven waves, even when propagating alongthe magnetic field line, to cross the radial grid, thus imposing restrictions on the timestep of integration [99]. Further restrictions are imposed by the strength of the explicitlysolved terms (as, e.g., in the case of high inverse aspect ratio equilibria and/or highlynon-linear cases).
The term ΠH in eq. (183) is the pressure-tensor of the energetic (hot) ions; it can beexpressed in terms of the corresponding distribution function fH (ΠH ≡ mH
∫d3vvvfH ,
with mH being the energetic-ion mass), to be determined by solving the Vlasov equation(the collisionless limit of the Boltzmann equation). Since the time scale of the dynamicswe want to analyze is long compared to a cyclotron period, it is convenient [102, 103] tosolve the Vlasov equation in the gyrocenter-coordinate system Z ≡
(R,M,U, θ
), where
R is the gyrocenter position, M is the magnetic moment, U is the parallel velocity (i.e.,the velocity along the magnetic-field line), and θ is the gyrophase. This corresponds toaveraging the single-particle equations of motion over many cyclotron orbits and allowsone to retain the relevant finite-Larmor-radius effects without resolving the details of thegyromotion. Such a choice is particularly suited for numerical time integration of theparticle motion, as the numerical-stability constraint on the time-step size turns out to bemuch less severe than that we would obtain without adopting the averaging procedure.
The hot-particle pressure tensor assumes the following form, in terms of the gyrocenter-coordinate distribution function,
ΠH (t,x) =1
m2H
∫d6ZDzc→ZFH
(t,R,M,U
)×
[ΩHM
mHI + bb
(U
2 − ΩHM
mH
)]δ(x − R
),(190)
where I is the identity tensor (Iij ≡ δij), FH(t,R,M,U
)is the energetic-particle dis-
tribution function in gyrocenter coordinates, and Dzc→Z is the Jacobian of the transfor-mation from canonical to gyrocenter coordinates.
The Vlasov equation can be written as
dFHdt
= 0,(191)
with
d
dt≡ ∂
∂t+dZ
i
dt
∂
∂Zi,

DYNAMICS OF ALFVEN WAVES IN TOKAMAKS 95
and dZi/dt given by the following equations of motion [61, 104, 105, 106]
dR
dt= U b +
eHmHΩH
b×∇φ− U
mHΩHb×∇a‖ +
[M
mH+
U
ΩH
(U +
a‖mH
)]b ×∇ lnB,
dM
dt= 0,(192)
dU
dt=
1
mHb·[
eHΩH
(U +
a‖
mH
)∇φ+
M
mH∇a‖
]×∇ lnB +
eHmHΩH
∇a‖×∇φ− ΩHM
mHb · ∇ lnB.
Here, eH and ΩH ≡ eHB/(mHc) are, respectively, the energetic-ion charge and Larmorfrequency. The fluctuating potential a‖ is related to the poloidal magnetic flux functionψ through the relationship
a‖ =eHc
R0
Rψ.(193)
Note that the magnetic moment M is exactly conserved in this coordinate system andthat, correspondingly, neither FH nor the equations of motion contain any dependenceon the gyrophase θ.
The particle-simulation approach to the solution of Vlasov equation, eq. (191), con-sists in representing any phase-space function G(t, Z) by its discretized form,
G(t, Z)≡∫d6Z ′G
(t, Z ′
)δ(Z − Z ′
)≈∑
l
∆lG(t, Z l
)δ(Z − Z l
),(194)
where ∆l is the volume element around the phase-space marker Z l, and in assuming thateach marker evolves in time according to the gyrocenter equations of motion, eqs. (192).Such markers can then be interpreted as the phase-space coordinates of a set of Npart“particles”, and G(t, Z) can be approximated by
G(t, Z)≈Npart∑
l=1
∆l (t) G(t, Z l (t)
)δ(Z − Z l (t)
).(195)
The time-variation of the volume element ∆l (t) is then given by
d∆l
dt= ∆l(t)
(∂
∂Zi
dZi
dt
)
t,Zl(t)
.(196)
For the purpose of calculating the pressure tensor components, eq.(190), it is conve-nient to directly represent the quantity Dzc→ZFH according to its discretized form
Dzc→Z
(t, Z)FH
(t, Z)≈
Npart∑
l=1
wl (t) δ(Z − Z l (t)
),(197)
with the weight factor wl defined by
wl (t) ≡ ∆l FH(t, Zl (t)
),(198)

96 G. VLAD, F. ZONCA and S. BRIGUGLIO
and∆l ≡ ∆l (t) Dzc→Z
(t, Z l (t)
).(199)
In fact, from eqs.(191), (196), and from the Liouville theorem,
∂
∂tDzc→Z +
∂
∂Zi
(Dzc→Z
dZi
dt
)= 0 ,(200)
it is immediate to show thatd∆l
dt= 0,(201)
anddwldt
= 0.(202)
At each time step, the fluctuating electromagnetic potentials are computed at thegrid points of a three-dimensional toroidal domain in terms of the Fourier componentsyielded by the field solver. Phase-space coordinates are then evolved in the fluctuatingfields, and the pressure tensor components at the grid points are updated, in order toclose the MHD equations for the next time step.
Field values at each particle position are obtained by trilinear interpolation of thefields at the vertices of the cell the particle belongs to. The corresponding trilinear weightfunction is adopted, after pushing the particles, in order to distribute their contributionto the pressure tensor components among the vertices of the cell. Phase-space coordinatesand weights for the simulation particles are initially determined in such a way to yielda prescribed (e.g., Maxwellian) distribution function. Particle pushing is performedby integrating eqs. (192) by a second-order Runge-Kutta method, more accurate thanthe standard O(∆t) Euler method (O(∆t2) is properly retained), although more timeconsuming. Particles that hit the wall (r = a) are considered lost and are not re-injectedin the plasma.
It has been shown [61, 107, 108, 109, 110, 111] that, as far as regimes are consideredwhere the distribution function can be expected to slightly depart from the equilibriumone, it is worth limiting the numerical investigation to the evolution of the perturbedpart δFH , defined by the relationship
FH(t,R,M,U
)= FH0
(t,R,M,U
)+ δFH
(t,R,M,U
),(203)
where FH0 is the lowest-order (“equilibrium”) distribution function.In terms of δFH , eq.(191) can be written in the form
dδFHdt
= S ,(204)
with
S ≡ −dFH0
dt.
Meanwhile, eq.(197) is replaced by the following one,
Dzc→Z
(t, Z)δFH
(t, Z)≈
Npart∑
l=1
wl (t) δ(Z − Z l (t)
),(205)

DYNAMICS OF ALFVEN WAVES IN TOKAMAKS 97
with
wl (t) ≡ ∆lδFH(t, Z l (t)
),(206)
anddwldt
= ∆lS(t, Zl (t)
).(207)
Note that eq.(203) is by no means equivalent to a linearization of the Vlasov equation,since all non-linear terms are correctly retained. The decomposition of eq.(203) is usefulin reducing numerical noise as long as |δFH | |FH0|.
In the present paper, when adopting the δF approach, we take FH0 to be Maxwellian
FH0 ∝ nH(R)exp
(−ΩHM + 1
2mHU2
TH
),(208)
where nH(R)
and TH are, respectively, the energetic-particle equilibrium density and(uniform) temperature. The r.h.s. of eq.(204) is then given by
S(t,R,M,U
)= −FH0
dR
dt·∇ lnnH +
eHTH
[M
mH+
U
ΩH
(U +
a‖
mH
)]b ×∇ lnB·∇φ+
eHU
THΩHmHb · ∇φ×∇a‖
.(209)
We also assume the following model for the energetic-particle equilibrium density:
nH(r) = nH0 exp
[−(r2
L2n
)αn],(210)
where nH0 is the on-axis density.
REFERENCES
[1] K. Tamabechi, J.R. Gilleland, Yu.A. Sokolov, R. Toschi, and ITER
Team, Nucl. Fusion, 31, (1991) 1135.
[2] JET Joint Undertaking, Nucl. Fusion, Special Supplement, (1991) 22.
[3] D.J. Grove and D.M. Meade, Nucl. Fusion, 25, (1985) 1167.
[4] JET Team, Nucl. Fusion, 32, (1992) 187.
[5] TFTR Project, Nucl. Fusion, 35, (1995) 1429.
[6] A. Gibson, to be published in Phys. Plasmas, (1997).
[7] A.B. Mikhailovskii, Zh. Eksp. Teor. Fiz., 68, (1975) 1772.
[8] M.N. Rosenbluth and P.H. Rutherford, Phys. Rev. Lett., 34, (1975) 1428.
[9] K.T. Tsang, D.J. Sigmar, and J.C. Whitson, Phys. Fluids, 24, (1981) 1508.
[10] H. Grad, Phys. Today, 22, (1969) 34.
[11] C.E. Kieras and J.A. Tataronis, J. Plasma Physics, 28, (1982) 395.
[12] C.Z. Cheng, L. Chen, and M.S. Chance, Ann. Phys. (N.Y.), 161, (1985) 21.
[13] C.Z. Cheng and M.S. Chance, Phys. Fluids, 29, (1986) 3695.
[14] D.J. Sigmar, C.T. Hsu, R.B. White, and C.Z. Cheng, Phys. Fluid, B4, (1992)1506.

98 G. VLAD, F. ZONCA and S. BRIGUGLIO
[15] K.L. Wong, R.J. Fonk, S.F. Paul, D.R. Roberts, E.D. Fredrickson,R. Nazikian, H.K. Park, M. Bell, L. Bretz, R. Budny, S. Cohen, G.W.
Hammet, F.C. Jobes, D.M. Meade, S.S. Medley, D. Mueller, Y. Na-
gayama, D.K. Owens, and E.J. Synakowski, Phys. Rev. Lett., 66, (1991)1874.
[16] W.W. Heidbrink, E.J. Strait, E. Doyle, and R. Snider, Nucl. Fusion, 31,(1991) 1635.
[17] A. Fasoli, J.B. Lister, S.E. Sharapov, S. Ali-Arshad, G. Bosia, D. Borba,D.J. Campbell, N. Deliyanakis, J.A. Dobbing, C. Gormezano, H.A. Hol-
ties, G.T.A. Huysmans, J. Jacquinot, A. Jaun, W. Kerner, P. Lavanchy,J.-M. Moret, L. Porte, A. Santagiustina, and L. Villard, Nucl. Fusion,35, (1995) 1485.
[18] G.Y. Fu, C.Z. Cheng, H. Kimura, T. Ozeki, and M. Saigusa, Nucl. Fusion,36, (1996) 1759.
[19] G.Y. Fu, C.Z. Cheng, R. Budny, Z. Chang, D.S. Darrow, E. Fredrickson,E. Mazzucato, R. Nazikian, K.L. Wong, and S. Zweben, Phys. Plasmas, 3,(1996) 4036.
[20] L. Chen, in Theory of Fusion Plasmas, edited by J. Vaclavik, F. Troyon, andE. Sindoni, pp. 327–338, Bologna, 1988, Editrice Compositori Societa Italiana diFisica.
[21] L. Chen, R.B. White, G. Rewoldt, P.L. Colestock, P.H. Rutherford,M.N. Bussac, Y.P. Chen, F.J. Ke, and S.T. Tsai, in Proceedings of the 12thInternational Conference on Plasma Physics and Controlled Nuclear Fusion Re-search, Nice (France), vol. 2, p. 77, Vienna, 1989, International Atomic EnergyAgency.
[22] G.Y. Fu and J.W. Van Dam, Phys. Fluids B, 1, (1989) 1949.
[23] R. Betti and J.P. Freidberg, Phys. Fluids B, 4, (1992) 1465.
[24] H.L. Berk, B.N. Breizman, and H. Ye, Phys. Lett. A, 162, (1992) 475.
[25] G.Y. Fu and C.Z. Cheng, Phys. Fluids B, 4, (1992) 3722.
[26] F. Zonca and L. Chen, Phys. Plasmas, 3, (1996) 323.
[27] H. Biglari, F. Zonca, and L. Chen, Phys. Fluids B, 4, (1992) 2385.
[28] A.B. Mikhailovskii and I.G. Shuchman, Zh. Eksp. Teor. Fiz., 71, (1976) 1813.
[29] N.N. Gorelenkov and S.E. Sharapov, Phys. Scr., 45, (1992) 163.
[30] R.R. Mett and S.M. Mahajan, Phys. Fluids B, 4, (1992) 2885.
[31] R.R. Mett and S.M. Mahajan, in Theory of Fusion Plasmas, edited by J. Va-
clavik, F. Troyon, and E. Sindoni, p. 243, Bologna, 1992, Editrice Compositori,Societa Italiana di Fisica.
[32] H.L. Berk, R.R. Mett, and D.M. Lindberg, Phys. Fluids B, 5, (1993) 3969.
[33] M.S. Chu, A.D. Turnbull, J.M. Greene, L.L. Lao, M.S. Chance, H.L.
Berk, B.N. Breizman, W.Q. Li, D.M. Lindberg, S.M. Mahajan, R.R.
Mett, D.W. Ross, J.W. Van Dam, J.C. Wiley, H. Ye, J. Candy, and M.N.
Rosenbluth, in Proceedings of the 14th International Conference on PlasmaPhysics and Controlled Nuclear Fusion Research, Wurzburg (Germany), vol. I, p.855, Vienna, 1993, International Atomic Energy Agency.
[34] J. Candy and M.N. Rosenbluth, in Bull. Am. Phys. Soc., volume 37, p. 1558,1992.
[35] J. Candy and M.N. Rosenbluth, Phys. Plasmas, 1, (1994) 356.

DYNAMICS OF ALFVEN WAVES IN TOKAMAKS 99
[36] F. Zonca, Continuum damping of toroidal Alfven eigenmodes in finite-beta toka-mak equilibria, PhD thesis, Princeton University, Plasma Physics Laboratory,Princeton N.J., 1993.
[37] F. Zonca and L. Chen, Phys. Rev. Lett., 68, (1992) 592.[38] F. Zonca and L. Chen, Phys. Fluids B, 5, (1993) 3668.[39] M.N. Rosenbluth, H.L. Berk, J.W. Van Dam, and D.M. Lindberg, Phys.
Rev. Lett., 68, (1992) 596.[40] H.L. Berk, J.W. Van Dam, Z. Guo, and D.M. Lindberg, Phys. Fluids B, 4,
(1992) 1806.[41] L. Chen, Phys. Plasmas, 1, (1994) 1519.[42] C.Z. Cheng, N.N. Gorelenkov, and C.T. Hsu, Nucl. Fusion, 35, (1995) 1639.[43] H.L. Berk and G. Breizman, Phys. Fluids B, 2, (1990) 2246.[44] F. Zonca, F. Romanelli, G. Vlad, and C. Kar, Phys. Rev. Lett., 74, (1995)
698.[45] J.P. Freidberg, Ideal Magnetohydrodynamics, Plenum Press, New York, 1987.[46] S.M. Mahajan, Physica Scripta, T60, (1995) 160.[47] J.P. Goedbloed, Physica, 12D, (1984) 107.[48] L. Chen and A. Hasegawa, Phys. Fluids, 17, (1974) 1399.[49] L. Chen and F. Zonca, Physica Scripta, T60, (1995) 81.[50] A. Hasegawa and L. Chen, Phys. Rev. Lett., 35, (1975) 370.[51] A. Hasegawa and L. Chen, Phys. Rev. Lett., 36, (1976) 1362.[52] E.M. Barston, Ann. Phys., 29, (1964) 282.[53] Z. SedlaCek, J. Plasma Physics, 5, (1971) 239.[54] K. Appert, R. Gruber, F. Troyon, and J. Vaclavik, Plasma Physics, 24,
(1982) 1147.[55] C.Z. Cheng, G.Y. Fu, and J.W. Van Dam, in Theory of Fusion Plasmas,
edited by J. Vaclavik, F. Troyon, and E. Sindoni, pp. 259–270, Bologna,1988, Editrice Compositori Societa Italiana di Fisica.
[56] A. Hasegawa and L. Chen, Phys. Rev. Lett., 32, (1974) 454.[57] J.W. Connor, R.J. Hastie, and J.B. Taylor, Proc. R. Soc. London Ser. A,
365, (1979) 1.[58] G. Vlad, F. Zonca, and F. Romanelli, Nucl. Fusion, 35, (1995) 1651.[59] G.Y. Fu and C.Z. Cheng, Phys. Fluids B, 2, (1990) 985.[60] F. Zonca, Plasma Phys. Controlled Fusion, 35, (1993) B307.[61] S. Briguglio, G. Vlad, F. Zonca, and C. Kar, Phys. Plasmas, 2, (1995) 3711.[62] S.T. Tsai and L. Chen, Phys. Fluids B, 5, (1993) 3284.[63] R.A. Santoro and L. Chen, Phys. Plasmas, 3, (1996) 2349.[64] C. Kar, G. Vlad, and F. Romanelli, Phys. Letters A, 182, (1993) 309.[65] S. Poedts, W. Kerner, J.P. Goedbloed, B. Keegan, G.T.A. Huysmans,
and E. Schwarz, Plasma Phys. Controlled Fusion, 34, (1992) 1397.[66] B.D. Fried and S.D. Conte, The Plasma Dispersion Function, Academic Press,
New York, 1961.[67] Y. Wu and R.B. White, Phys. Plasmas, 1, (1994) 2733.[68] Y. Wu, R.B. White, Y. Chen, and M.N. Rosenbluth, Phys. Plasmas, 2,
(1995) 4555.[69] D. Borba, J. Candy, A. Fasoli, W. Kerner, D. Muir, and S. Sharapov,
Linear and nonlinear dynamics of alfven eigenmodes in jet plasmas, in ControlledFusion and Plasma Physics (Proc. 23nd Eur. Conf. Kiev), volume 20C, Part I, p.143, Geneva, 1996, European Physical Society.

100 G. VLAD, F. ZONCA and S. BRIGUGLIO
[70] H.L. Berk, B.N. Breizman, and H. Ye, Phys. Lett. A, 162, (1992) 475.[71] T.S. Hahm and L. Chen, Phys. Rev. Lett., 74, (1995) 266.[72] G. Vlad, C. Kar, F. Zonca, and F.Romanelli, Phys. Plasmas, 2, (1995) 418.[73] G. Vlad, S. Briguglio, C. Kar, F. Zonca, and F. Romanelli, in Theory of
Fusion Plasmas, edited by E. Sindoni and J. Vaclavik, pp. 361–382, Bologna,1992, Editrice Compositori Societa Italiana di Fisica.
[74] D.A. Spong, B.A. Carreras, and C.L. Hedrick, Phys. Plasmas, 1, (1994)1503.
[75] G. Hu and L. Chen, Bull. Am. Phys. Soc., 41, (1996) 1397.[76] A. Thyagaraja, C. Lashmore-Davies, W. Han, and W.H. Yang, in Pro-
ceedings of the 24th EPS Conference on Controlled Fusion and Plasma Physics,Part I, edited by M. Schittenhelm, R. Bartiromo, and F. Wagner, p. 277,Berchtesgaden (Germany), 1997, The European Physical Society.
[77] L. Chen, F. Zonca, R.A. Santoro, and G. Hu, Submitted to Phys. Rev. Lett.,(1998).
[78] Y. Todo, T. Sato, K. Watanabe, T.H. Watanabe, and R. Horiuchi, Phys.Plasmas, 2, (1995) 2711.
[79] L. Chen, R.B. White, and M.N. Rosenbluth, Phys. Rev. Lett., 52, (1984)1122.
[80] R.B. White, R.J. Goldston, K. McGuire, A.H. Boozer, D.A. Monti-
cello, and W. Park, Phys. Fluids, 26, (1983) 2958.[81] H.L. Berk, B.N. Breizman, and H. Ye, Phys. Rev. Lett., 68, (1992) 3563.[82] S. Briguglio, C. Kar, F. Romanelli, G. Vlad, and F. Zonca, Plasma Phys.
and Controlled Fusion, 37, (1995) A279.[83] C.Z. Cheng, H.L. Berk, D. Borba, R. Budny, R.H. Bulmer, J. Candy,
D.S. Darrow, A. Fasoli, E.D. Fredrikson, G.Y. Fu, R.J. Goldston, N.N.
Gorelenkov, G.T.A. Huysmans, W. Kerner, H. Kimura, S.V. Konovalov,Y. Kusama, J. Manickam, R. Nazikian, G.H. Neilson, W.M. Nevins,T. Ozeki, L.D. Pearlstein, S. Putvinskii, M.H. Redi, F. Romanelli,M.N. Rosenbluth, S. Sharapov, D.A. Spong, K. Tobita, J.W. Van Dam,G. Vlad, R.B. White, K.L. Wong, V. Wong, F. Zonca, and S.J. Zweben, inPlasma Physics and Controlled Nuclear Fusion Research 1996, Montreal, volume 2,p. 953, Vienna, 1997, International Atomic Energy Agency.
[84] W.W. Heidbrink, in Alpha Particles in Fusion Research, edited byJ. Jacquinot, B.E. Keen, and G. Sadler, pp. 65–68, Abingdon, UK, 1997,JET Joint Undertaking.
[85] S. Briguglio, L. Chen, F. Romanelli, R.A. Santoro, G. Vlad, andF. Zonca, in Plasma Physics and Controlled Nuclear Fusion Research 1996,Montreal, volume 2, p. 543, Vienna, 1997, International Atomic Energy Agency.
[86] H. Biglari and L. Chen, Phys. Rev. Lett., 67, (1991) 3681.[87] S.T. Tsai and L. Chen, Phys. Fluids, B5, (1993) 3284.[88] W.W. Heidbrink, E.J. Strait, M.S. Chu, and A.D. Turnbull, Phys. Rev.
Lett., 71, (1993) 855.[89] A.D. Turnbull, E.J. Strait, W.W. Heidbrink, M.S. Chu, J.M. Greene,
L.L. Lao, T.S. Taylor, and S.J. Thompson, Phys. Fluids, B5, (1993) 2546.[90] F. Zonca, L. Chen, and R.A. Santoro, Plasma Phys. Contr. Fus., 38, (1996)
2011.[91] B.V. Chirikov, Phys. Rep., 52, (1979) 263.[92] S. Briguglio, F. Zonca, and G. Vlad, Submitted to Phys. Plasmas, (1998).

DYNAMICS OF ALFVEN WAVES IN TOKAMAKS 101
[93] H. Lutjens, A. Bondeson, and A. Roy, Comput. Phys. Commun., 69, (1992)287.
[94] A. Bondeson, G. Vlad, and H. Lutjens, Phys. Fluids B, 4, (1992) 1899.[95] A. Bondeson, G. Vlad, and H. Lutjens, in Proceedings of the International
Atomic Energy Agency Technical Committee Meeting on Advances in Simulationsand Modeling of Thermonuclear Plasmas, Montreal, Canada, 15-18 June 1992, p.306, Vienna, 1993, International Atomic Energy Agency.
[96] A. Bondeson and G.Y. Fu, Comput. Phys. Commun., 66, (1991) 167.[97] R. Gruber, F. Troyon, and D. Berger et al., Comput. Phys. Commun., 21,
(1981) 323.[98] H.R. Strauss, Phys. Fluids, 20, (1977) 1354.[99] R. Izzo, D.A. Monticello, W. Park, J. Manickam, H.R. Strauss,
R. Grimm, and K. McGuire, Phys. Fluids, 26, (1983) 2240.[100] W. Park, S. Parker, H. Biglari, M. Chance, L. Chen, C.Z. Cheng, T.S.
Hahm, W.W. Lee, R. Kulsrud, D. Monticello, L. Sugiyama, and R.B.
White, Phys. Fluids B, 4, (1992) 2033.[101] A. Bondeson, Nucl. Fusion, 26, (1986) 929.[102] W.W. Lee, Phys. Fluids, 26, (1983) 556.[103] W.W. Lee, J. Comput. Phys., 72, (1987) 243.[104] T.S. Hahm, Phys. Fluids, 31, (1988) 2670.[105] T.S. Hahm, W.W. Lee, and A. Brizard, Phys. Fluids, 31, (1988) 1940.[106] A.M. Dimits, L.L. LoDestro, and D.H.E. Dubin, Phys. Fluids B, 4, (1992)
274.[107] T. Tajima and F.W. Perkins, private communication, 1983.[108] T. Tajima, Computational Plasma Physics, Addison-Wesley, Redwood City,
California, 1989.[109] M. Kotschenruether, in Bull. Am. Phys. Soc., volume 33, p. 2107, 1988.[110] S. Briguglio, G. Betello, G. Fogaccia, G. Graziadei, S.C. Guo, C. Kar,
F. Romanelli, G. Vlad, and F. Zonca, in Plasma Physics and Controlled Nu-clear Fusion Research 1992, Wurzburg, volume II CN-56/D-2-3, pp. 87–95, Vienna,1993, International Atomic Energy Agency.
[111] S.E. Parker and W.W. Lee, Phys. Fluids B, 5, (1993) 77.

102 G. VLAD, F. ZONCA and S. BRIGUGLIO
6. – *
Contents1 – Introduction 1
2 – Linear Theory 4
2.1 Waves in an infinite homogeneous plasma. – . . . . . . . . . . . . . . . . 5
2.2 Waves in a non-uniform slab configuration. – . . . . . . . . . . . . . . . . 8
2.3 Waves in general non-uniform axisymmetric equilibria. – . . . . . . . . . 13
2.4 Waves in a cylinder. – . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.5 Waves in a torus: analytic theory. – . . . . . . . . . . . . . . . . . . . . . 22
2.5.1 Two-Dimensional WKB analysis . . . . . . . . . . . . . . . . . . . 28
2.5.2 Gap formation and continuum damping . . . . . . . . . . . . . . . 32
2.5.3 Excitation of kinetic TAE . . . . . . . . . . . . . . . . . . . . . . . 34
2.5.4 Resonant excitation of gap modes . . . . . . . . . . . . . . . . . . 35
2.5.5 Energetic Particle Modes . . . . . . . . . . . . . . . . . . . . . . . 41
2.6 Waves in a torus: numerical results. – . . . . . . . . . . . . . . . . . . . . 41
2.6.1 Global toroidal modes . . . . . . . . . . . . . . . . . . . . . . . . . 46
2.6.2 Continuum damping . . . . . . . . . . . . . . . . . . . . . . . . . . 51
2.6.3 Kinetic effects . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
3 – Non-linear Theory 62
3.1 Fluid non-linearities. – . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
3.2 Non-linear density modulation. – . . . . . . . . . . . . . . . . . . . . . . . 64
3.3 E× B convective non-linearities. – . . . . . . . . . . . . . . . . . . . . . . 68
3.4 Kinetic non-linearities. – . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
3.4.1 Gap-mode saturation . . . . . . . . . . . . . . . . . . . . . . . . . . 74
3.4.2 EPM saturation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
4 – Discussions and Open Problems 84
5 – Appendices 89
5.1 CHEASE. – . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
5.2 MARS. – . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
5.3 Order-ε3 reduced MHD. – . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
5.4 Hybrid MHD-kinetic models. – . . . . . . . . . . . . . . . . . . . . . . . . 92
5.5 Hybrid MHD-kinetic code. – . . . . . . . . . . . . . . . . . . . . . . . . . 92
6 – * 102