-
Optimal Design of Piezoelectric Transducers
D.Ruiz,J.C.Bellido & A.Donoso
Department of Mathematics, University of Castilla-la Mancha,
Spain
11th WCSMO
Sydney, June 9th, 2015
-
IntroductionProblem formulation
Numerical approach and examplesConclusions and future work
1 Introduction
2 Problem formulation
3 Numerical approach and examples
4 Conclusions and future work
D.Ruiz, J.C.Bellido & A.Donoso Optimal Design of
Piezoelectric Transducers
-
IntroductionProblem formulation
Numerical approach and examplesConclusions and future work
1 Introduction
2 Problem formulation
3 Numerical approach and examples
4 Conclusions and future work
D.Ruiz, J.C.Bellido & A.Donoso Optimal Design of
Piezoelectric Transducers
-
IntroductionProblem formulation
Numerical approach and examplesConclusions and future work
Beginnings
Electronics + Mathematics = Great results!
D.Ruiz, J.C.Bellido & A.Donoso Optimal Design of
Piezoelectric Transducers
-
IntroductionProblem formulation
Numerical approach and examplesConclusions and future work
Modal sensors/actuators
DescriptionMSA are piezoelectric-based devices that
excite/measure a specific mode.
C.K.Lee and F.C.Moon. Modal Sensors/Actuators. Journal of
AppliedMechanics, volume(57), 434-441, 1990.
Analytical expressions for one-dimensional plates.
Figure: Mode shape and top view of optimized sensors for 1st and
2nd eigenmodes
D.Ruiz, J.C.Bellido & A.Donoso Optimal Design of
Piezoelectric Transducers
-
IntroductionProblem formulation
Numerical approach and examplesConclusions and future work
Modal sensors/actuators
DescriptionMSA are piezoelectric-based devices that
excite/measure a specific mode.
C.K.Lee and F.C.Moon. Modal Sensors/Actuators. Journal of
AppliedMechanics, volume(57), 434-441, 1990.
Analytical expressions for one-dimensional plates.
Figure: Mode shape and top view of optimized sensors for 1st and
2nd eigenmodes
D.Ruiz, J.C.Bellido & A.Donoso Optimal Design of
Piezoelectric Transducers
-
IntroductionProblem formulation
Numerical approach and examplesConclusions and future work
Two-dimensional modal sensors/actuators
A. Donoso and J.C. Bellido. Systematic design of distributed
piezoelectric modalsensor/actuators for rectangular plates by
optimizing the polarization profile.Struct. Multidisc. Optim.
volume(38), 347-356, 2009
J.L. Sánchez-Rojas, J. Hernando, A. Donoso, J.C. Bellido, T.
Manzaneque, A.Ababneh, H. Seidel, U. Schmid. Modal optimization and
filtering inpiezoelectric microplate resonators. J Micromech
Microeng 20:055027,2010
D.Ruiz, J.C.Bellido & A.Donoso Optimal Design of
Piezoelectric Transducers
-
IntroductionProblem formulation
Numerical approach and examplesConclusions and future work
The problem
Aim
Optimal design of two-dimensional MSA by optimizing
simultaneously the topology and
the electrode polarization.
Why MSA?
Powerful applications: measurement of density and viscosity in
fluids and substance
detection. Simplify electronic circuits.
D.Ruiz, J.C.Bellido & A.Donoso Optimal Design of
Piezoelectric Transducers
-
IntroductionProblem formulation
Numerical approach and examplesConclusions and future work
The problem
Aim
Optimal design of two-dimensional MSA by optimizing
simultaneously the topology and
the electrode polarization.
Why MSA?
Powerful applications: measurement of density and viscosity in
fluids and substance
detection. Simplify electronic circuits.
D.Ruiz, J.C.Bellido & A.Donoso Optimal Design of
Piezoelectric Transducers
-
IntroductionProblem formulation
Numerical approach and examplesConclusions and future work
1 Introduction
2 Problem formulation
3 Numerical approach and examples
4 Conclusions and future work
D.Ruiz, J.C.Bellido & A.Donoso Optimal Design of
Piezoelectric Transducers
-
IntroductionProblem formulation
Numerical approach and examplesConclusions and future work
Continuous formulation
Output charge up to a scalling factor can be expressed as
follows (C.K. Lee and F.C.Moon 1990):
q(t) =
∫Ωχp(x , y)
[(∂u
∂x+∂v
∂y
)−
(hs + hp)
2
(∂2w
∂x2+∂2w
∂y2
)]dΩ
?χs= 1
TOP VIEW
SIDE VIEW
Finχs=0
χp=
χp= -1
ELECTRODEPROFILE
VOID
STRUCTUREANDPIEZO
STRUCTUREPIEZO
PIEZO1
q
χp= 0
out
Ω
D.Ruiz, J.C.Bellido & A.Donoso Optimal Design of
Piezoelectric Transducers
-
IntroductionProblem formulation
Numerical approach and examplesConclusions and future work
Continuous formulation (cont.)
Using modal expansion:
u(x , y , t) =∞∑
j=1
φj (x , y)ηj (t)
v(x , y , t) =∞∑
j=1
ψj (x , y)ηj (t)
w(x , y , t) =∞∑
j=1
ϕj (x , y)ηj (t)
Replacing:
q(t) =∞∑
j=1
Fjηj (t), Fj =
∫Ωχp(x , y)
[(∂φ
∂x+∂ψ
∂y
)−
(hs + hp)
2
(∂2ϕ
∂x2+∂2ϕ
∂y2
)]dΩ
D.Ruiz, J.C.Bellido & A.Donoso Optimal Design of
Piezoelectric Transducers
-
IntroductionProblem formulation
Numerical approach and examplesConclusions and future work
Continuous formulation (cont.)
Using modal expansion:
u(x , y , t) =∞∑
j=1
φj (x , y)ηj (t)
v(x , y , t) =∞∑
j=1
ψj (x , y)ηj (t)
w(x , y , t) =∞∑
j=1
ϕj (x , y)ηj (t)
Replacing:
q(t) =∞∑
j=1
Fjηj (t), Fj =
∫Ωχp(x , y)
[(∂φ
∂x+∂ψ
∂y
)−
(hs + hp)
2
(∂2ϕ
∂x2+∂2ϕ
∂y2
)]dΩ
D.Ruiz, J.C.Bellido & A.Donoso Optimal Design of
Piezoelectric Transducers
-
IntroductionProblem formulation
Numerical approach and examplesConclusions and future work
Continuous formulation (cont.)
maxχs ,χp
: Fk (χp ,Φk (χs ))
s.t. : A(χs ,Φj (χs )) = 0|Fj (χp ,Φj (χs ))| ≤ �Fk (χp ,Φk (χs
)), j = 1, . . . , J, j 6= k
χs ∈ {0, 1}χp ∈ {−1, 0, 1}
Bound formulation:maxχs ,χp
: Fk (χp ,Φk (χs ))− α
s.t. : A(χs ,Φj (χs )) = 0|Fj (χp ,Φj (χs ))| ≤ α, j = 1, . . .
, J, j 6= k
χs ∈ {0, 1}χp ∈ {−1, 0, 1}α ≥ 0
D.Ruiz, J.C.Bellido & A.Donoso Optimal Design of
Piezoelectric Transducers
-
IntroductionProblem formulation
Numerical approach and examplesConclusions and future work
Continuous formulation (cont.)
maxχs ,χp
: Fk (χp ,Φk (χs ))
s.t. : A(χs ,Φj (χs )) = 0|Fj (χp ,Φj (χs ))| ≤ �Fk (χp ,Φk (χs
)), j = 1, . . . , J, j 6= k
χs ∈ {0, 1}χp ∈ {−1, 0, 1}
Bound formulation:maxχs ,χp
: Fk (χp ,Φk (χs ))− α
s.t. : A(χs ,Φj (χs )) = 0|Fj (χp ,Φj (χs ))| ≤ α, j = 1, . . .
, J, j 6= k
χs ∈ {0, 1}χp ∈ {−1, 0, 1}α ≥ 0
D.Ruiz, J.C.Bellido & A.Donoso Optimal Design of
Piezoelectric Transducers
-
IntroductionProblem formulation
Numerical approach and examplesConclusions and future work
Discrete approach
FEM
Integer variables (χs , χp) → Density variables (ρs , ρp)
(RAMP)
Dicretized coefficients Fi can be expressed as follows: Fi =
R(ρs )(2ρp − 1)BΦi
R(ρs ) is an interpolation scheme. R(ρ(e)s ) = e
−γ(1−ρ(e)s ) − (1− ρ(e)s )e−γ(2ρp − 1) is the polarization
density.B is the strain displacement matrix.Φi is the i-th mode
shape.
R
se
0 1
1=0=1=3=5
D.Ruiz, J.C.Bellido & A.Donoso Optimal Design of
Piezoelectric Transducers
-
IntroductionProblem formulation
Numerical approach and examplesConclusions and future work
Discrete approach
FEM
Integer variables (χs , χp) → Density variables (ρs , ρp)
(RAMP)
Dicretized coefficients Fi can be expressed as follows: Fi =
R(ρs )(2ρp − 1)BΦi
R(ρs ) is an interpolation scheme. R(ρ(e)s ) = e
−γ(1−ρ(e)s ) − (1− ρ(e)s )e−γ(2ρp − 1) is the polarization
density.B is the strain displacement matrix.Φi is the i-th mode
shape.
R
se
0 1
1=0=1=3=5
D.Ruiz, J.C.Bellido & A.Donoso Optimal Design of
Piezoelectric Transducers
-
IntroductionProblem formulation
Numerical approach and examplesConclusions and future work
Discrete approach
FEM
Integer variables (χs , χp) → Density variables (ρs , ρp)
(RAMP)
Dicretized coefficients Fi can be expressed as follows: Fi =
R(ρs )(2ρp − 1)BΦi
R(ρs ) is an interpolation scheme. R(ρ(e)s ) = e
−γ(1−ρ(e)s ) − (1− ρ(e)s )e−γ(2ρp − 1) is the polarization
density.B is the strain displacement matrix.Φi is the i-th mode
shape.
R
se
0 1
1=0=1=3=5
D.Ruiz, J.C.Bellido & A.Donoso Optimal Design of
Piezoelectric Transducers
-
IntroductionProblem formulation
Numerical approach and examplesConclusions and future work
Discrete approach (cont.)
Discrete problemmax
ρs ,ρp ,α: Fk − α
s.t. : (K− µj M)Φj = 0, j = 1, . . . , JΦTj MΦl = 0, j , l = 1,
. . . , J, j 6= l
ΦTj Φj = 1, j = 1 . . . , J|Fj | ≤ α, j = 1, . . . , J, j 6= kρs
∈ [0, 1]ρp ∈ [0, 1]α ≥ 0
Problem with eigenvectors in both, cost and constraints.
Introduction of an interpolation scheme in the expression of the
collectedcharge.
D.Ruiz, J.C.Bellido & A.Donoso Optimal Design of
Piezoelectric Transducers
-
IntroductionProblem formulation
Numerical approach and examplesConclusions and future work
Discrete approach (cont.)
Discrete problemmax
ρs ,ρp ,α: Fk − α
s.t. : (K− µj M)Φj = 0, j = 1, . . . , JΦTj MΦl = 0, j , l = 1,
. . . , J, j 6= l
ΦTj Φj = 1, j = 1 . . . , J|Fj | ≤ α, j = 1, . . . , J, j 6= kρs
∈ [0, 1]ρp ∈ [0, 1]α ≥ 0
Problem with eigenvectors in both, cost and constraints.
Introduction of an interpolation scheme in the expression of the
collectedcharge.
D.Ruiz, J.C.Bellido & A.Donoso Optimal Design of
Piezoelectric Transducers
-
IntroductionProblem formulation
Numerical approach and examplesConclusions and future work
Difficulties
Classical issues in topology optimization problems
Local optima
Mode switching
Spurious modes
Normalization of eigenvectors
Large grey areas
Repeated eigenfrequencies
Figure: 2nd and 3rd mode shapes for a simply supported square
plate
D.Ruiz, J.C.Bellido & A.Donoso Optimal Design of
Piezoelectric Transducers
-
IntroductionProblem formulation
Numerical approach and examplesConclusions and future work
Difficulties
Classical issues in topology optimization problems
Local optima
Mode switching
Spurious modes
Normalization of eigenvectors
Large grey areas
Repeated eigenfrequencies
Figure: 2nd and 3rd mode shapes for a simply supported square
plate
D.Ruiz, J.C.Bellido & A.Donoso Optimal Design of
Piezoelectric Transducers
-
IntroductionProblem formulation
Numerical approach and examplesConclusions and future work
Computation of sensitivities
Optimizer used: Method of moving asymptotes (MMA).
Gradient-based method.Commonly used in structural optimization
problems.
The sensitivity with respect to the polarization density is
straighforward.
Fi = R(ρs )(2ρp − 1)BΦi (ρs )
Single eigenfrequencies → Adjoint + Nelson’s method.
Repeated eigenfrequencies → Dailey’s method.Computation of
eigenvectors Φ.Computation of adjacent eigenvectors Z =
ΦΓ.Computation of derivatives of Z, Z′.Computation of derivatives
of Φ, Φ′ = Z′ΓT
D.Ruiz, J.C.Bellido & A.Donoso Optimal Design of
Piezoelectric Transducers
-
IntroductionProblem formulation
Numerical approach and examplesConclusions and future work
Computation of sensitivities
Optimizer used: Method of moving asymptotes (MMA).
Gradient-based method.Commonly used in structural optimization
problems.
The sensitivity with respect to the polarization density is
straighforward.
Fi = R(ρs )(2ρp − 1)BΦi (ρs )
Single eigenfrequencies → Adjoint + Nelson’s method.
Repeated eigenfrequencies → Dailey’s method.Computation of
eigenvectors Φ.Computation of adjacent eigenvectors Z =
ΦΓ.Computation of derivatives of Z, Z′.Computation of derivatives
of Φ, Φ′ = Z′ΓT
D.Ruiz, J.C.Bellido & A.Donoso Optimal Design of
Piezoelectric Transducers
-
IntroductionProblem formulation
Numerical approach and examplesConclusions and future work
Computation of sensitivities
Optimizer used: Method of moving asymptotes (MMA).
Gradient-based method.Commonly used in structural optimization
problems.
The sensitivity with respect to the polarization density is
straighforward.
Fi = R(ρs )(2ρp − 1)BΦi (ρs )
Single eigenfrequencies → Adjoint + Nelson’s method.
Repeated eigenfrequencies → Dailey’s method.Computation of
eigenvectors Φ.Computation of adjacent eigenvectors Z =
ΦΓ.Computation of derivatives of Z, Z′.Computation of derivatives
of Φ, Φ′ = Z′ΓT
D.Ruiz, J.C.Bellido & A.Donoso Optimal Design of
Piezoelectric Transducers
-
IntroductionProblem formulation
Numerical approach and examplesConclusions and future work
1 Introduction
2 Problem formulation
3 Numerical approach and examples
4 Conclusions and future work
D.Ruiz, J.C.Bellido & A.Donoso Optimal Design of
Piezoelectric Transducers
-
IntroductionProblem formulation
Numerical approach and examplesConclusions and future work
Numerical approach
Algorithm
1 Choose J mode shapes of the homogeneous plate. These are the
reference forthe 1st iteration. J = 4, {Φ1,Φ2,Φ3,Φ4}
2 Initialize design variables ρs and ρp .
3 Compute L mode shapes for the plate to be optimized, with L
> J, largeenough. L = 8, {Φ1,Φ2, . . . ,Φ8}
4 Identify the J closest modes to the ones of reference, among
the set ofpreviously computed L modes by using MAC {Φ1,Φ5,Φ4,Φ8}.
Relabel thesequence from 1 to J. This is the reference for the next
iteration.
5 Check the multiplicity of eigenvalues by using a
tolerance.
Simple: Compute Fi and its derivatives with Nelson’s method.
Repeated:
Find a new basis of eigenvectors using MAC.Compute Fi and its
derivatives using Dailey’s method.
6 Update design variables by using MMA.
7 Until convergence go to step 3.
D.Ruiz, J.C.Bellido & A.Donoso Optimal Design of
Piezoelectric Transducers
-
IntroductionProblem formulation
Numerical approach and examplesConclusions and future work
Numerical approach
Algorithm
1 Choose J mode shapes of the homogeneous plate. These are the
reference forthe 1st iteration. J = 4, {Φ1,Φ2,Φ3,Φ4}
2 Initialize design variables ρs and ρp .
3 Compute L mode shapes for the plate to be optimized, with L
> J, largeenough. L = 8, {Φ1,Φ2, . . . ,Φ8}
4 Identify the J closest modes to the ones of reference, among
the set ofpreviously computed L modes by using MAC {Φ1,Φ5,Φ4,Φ8}.
Relabel thesequence from 1 to J. This is the reference for the next
iteration.
5 Check the multiplicity of eigenvalues by using a
tolerance.
Simple: Compute Fi and its derivatives with Nelson’s method.
Repeated:
Find a new basis of eigenvectors using MAC.Compute Fi and its
derivatives using Dailey’s method.
6 Update design variables by using MMA.
7 Until convergence go to step 3.
D.Ruiz, J.C.Bellido & A.Donoso Optimal Design of
Piezoelectric Transducers
-
IntroductionProblem formulation
Numerical approach and examplesConclusions and future work
Numerical approach
Algorithm
1 Choose J mode shapes of the homogeneous plate. These are the
reference forthe 1st iteration. J = 4, {Φ1,Φ2,Φ3,Φ4}
2 Initialize design variables ρs and ρp .
3 Compute L mode shapes for the plate to be optimized, with L
> J, largeenough. L = 8, {Φ1,Φ2, . . . ,Φ8}
4 Identify the J closest modes to the ones of reference, among
the set ofpreviously computed L modes by using MAC {Φ1,Φ5,Φ4,Φ8}.
Relabel thesequence from 1 to J. This is the reference for the next
iteration.
5 Check the multiplicity of eigenvalues by using a
tolerance.
Simple: Compute Fi and its derivatives with Nelson’s method.
Repeated:
Find a new basis of eigenvectors using MAC.Compute Fi and its
derivatives using Dailey’s method.
6 Update design variables by using MMA.
7 Until convergence go to step 3.
D.Ruiz, J.C.Bellido & A.Donoso Optimal Design of
Piezoelectric Transducers
-
IntroductionProblem formulation
Numerical approach and examplesConclusions and future work
Numerical approach
Algorithm
1 Choose J mode shapes of the homogeneous plate. These are the
reference forthe 1st iteration. J = 4, {Φ1,Φ2,Φ3,Φ4}
2 Initialize design variables ρs and ρp .
3 Compute L mode shapes for the plate to be optimized, with L
> J, largeenough. L = 8, {Φ1,Φ2, . . . ,Φ8}
4 Identify the J closest modes to the ones of reference, among
the set ofpreviously computed L modes by using MAC {Φ1,Φ5,Φ4,Φ8}.
Relabel thesequence from 1 to J. This is the reference for the next
iteration.
5 Check the multiplicity of eigenvalues by using a
tolerance.
Simple: Compute Fi and its derivatives with Nelson’s method.
Repeated:
Find a new basis of eigenvectors using MAC.Compute Fi and its
derivatives using Dailey’s method.
6 Update design variables by using MMA.
7 Until convergence go to step 3.
D.Ruiz, J.C.Bellido & A.Donoso Optimal Design of
Piezoelectric Transducers
-
IntroductionProblem formulation
Numerical approach and examplesConclusions and future work
Numerical approach
Algorithm
1 Choose J mode shapes of the homogeneous plate. These are the
reference forthe 1st iteration. J = 4, {Φ1,Φ2,Φ3,Φ4}
2 Initialize design variables ρs and ρp .
3 Compute L mode shapes for the plate to be optimized, with L
> J, largeenough. L = 8, {Φ1,Φ2, . . . ,Φ8}
4 Identify the J closest modes to the ones of reference, among
the set ofpreviously computed L modes by using MAC {Φ1,Φ5,Φ4,Φ8}.
Relabel thesequence from 1 to J. This is the reference for the next
iteration.
5 Check the multiplicity of eigenvalues by using a
tolerance.
Simple: Compute Fi and its derivatives with Nelson’s method.
Repeated:
Find a new basis of eigenvectors using MAC.Compute Fi and its
derivatives using Dailey’s method.
6 Update design variables by using MMA.
7 Until convergence go to step 3.
D.Ruiz, J.C.Bellido & A.Donoso Optimal Design of
Piezoelectric Transducers
-
IntroductionProblem formulation
Numerical approach and examplesConclusions and future work
Numerical approach
Algorithm
1 Choose J mode shapes of the homogeneous plate. These are the
reference forthe 1st iteration. J = 4, {Φ1,Φ2,Φ3,Φ4}
2 Initialize design variables ρs and ρp .
3 Compute L mode shapes for the plate to be optimized, with L
> J, largeenough. L = 8, {Φ1,Φ2, . . . ,Φ8}
4 Identify the J closest modes to the ones of reference, among
the set ofpreviously computed L modes by using MAC {Φ1,Φ5,Φ4,Φ8}.
Relabel thesequence from 1 to J. This is the reference for the next
iteration.
5 Check the multiplicity of eigenvalues by using a
tolerance.
Simple: Compute Fi and its derivatives with Nelson’s method.
Repeated:
Find a new basis of eigenvectors using MAC.Compute Fi and its
derivatives using Dailey’s method.
6 Update design variables by using MMA.
7 Until convergence go to step 3.
D.Ruiz, J.C.Bellido & A.Donoso Optimal Design of
Piezoelectric Transducers
-
IntroductionProblem formulation
Numerical approach and examplesConclusions and future work
Numerical approach
Algorithm
1 Choose J mode shapes of the homogeneous plate. These are the
reference forthe 1st iteration. J = 4, {Φ1,Φ2,Φ3,Φ4}
2 Initialize design variables ρs and ρp .
3 Compute L mode shapes for the plate to be optimized, with L
> J, largeenough. L = 8, {Φ1,Φ2, . . . ,Φ8}
4 Identify the J closest modes to the ones of reference, among
the set ofpreviously computed L modes by using MAC {Φ1,Φ5,Φ4,Φ8}.
Relabel thesequence from 1 to J. This is the reference for the next
iteration.
5 Check the multiplicity of eigenvalues by using a
tolerance.
Simple: Compute Fi and its derivatives with Nelson’s method.
Repeated:
Find a new basis of eigenvectors using MAC.Compute Fi and its
derivatives using Dailey’s method.
6 Update design variables by using MMA.
7 Until convergence go to step 3.
D.Ruiz, J.C.Bellido & A.Donoso Optimal Design of
Piezoelectric Transducers
-
IntroductionProblem formulation
Numerical approach and examplesConclusions and future work
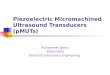
First example
Square plate clamped on its left edge. In-plane regime.
J = 4, L = 8.
Optimized mode shape: 1st.
Canceled mode shapes: 2nd, 3rd and 4th.
D.Ruiz, J.C.Bellido & A.Donoso Optimal Design of
Piezoelectric Transducers
-
IntroductionProblem formulation
Numerical approach and examplesConclusions and future work
First example cont.
The gain obtained is 106% with respect to the optimization of
only the polarityvariable ρp .
1 2 3 40
0.5
1
1.5
2
2.5
Simultaneous
optimization
Single
optimization
Mode shape
Norm
alized F
i
0 50 100 150 200 250 300500
1000
1500
2000
2500
3000
3500
4000
Iteration number
Eig
enfr
equencie
s
D.Ruiz, J.C.Bellido & A.Donoso Optimal Design of
Piezoelectric Transducers
-
IntroductionProblem formulation
Numerical approach and examplesConclusions and future work
Square plate clamped on its left edge
In-plane
(a) 1st mode (b) 2nd mode (c) 3rd mode (d) 4th mode
Out-of-plane
(e) 1st mode (f) 2nd mode (g) 3rd mode (h) 4th mode
D.Ruiz, J.C.Bellido & A.Donoso Optimal Design of
Piezoelectric Transducers
-
IntroductionProblem formulation
Numerical approach and examplesConclusions and future work
Square plate clamped on its left edge
In-plane
(a) 1st mode (b) 2nd mode (c) 3rd mode (d) 4th mode
Out-of-plane
(e) 1st mode (f) 2nd mode (g) 3rd mode (h) 4th mode
D.Ruiz, J.C.Bellido & A.Donoso Optimal Design of
Piezoelectric Transducers
-
IntroductionProblem formulation
Numerical approach and examplesConclusions and future work
Square plate clamped on its left and right edges
In-plane
(a) 1st mode (b) 2nd mode (c) 3rd mode (d) 4th mode
Out-of-plane
(e) 1st mode (f) 2nd mode (g) 3rd mode (h) 4th mode
D.Ruiz, J.C.Bellido & A.Donoso Optimal Design of
Piezoelectric Transducers
-
IntroductionProblem formulation
Numerical approach and examplesConclusions and future work
Square plate clamped on its left and right edges
In-plane
(a) 1st mode (b) 2nd mode (c) 3rd mode (d) 4th mode
Out-of-plane
(e) 1st mode (f) 2nd mode (g) 3rd mode (h) 4th mode
D.Ruiz, J.C.Bellido & A.Donoso Optimal Design of
Piezoelectric Transducers
-
IntroductionProblem formulation
Numerical approach and examplesConclusions and future work
Square plate clamped on its four edges
In-plane
(a) 1st mode (b) 2nd mode (c) 3rd mode (d) 4th mode
Out-of-plane
(e) 1st mode (f) 2nd mode (g) 3rd mode (h) 4th mode
D.Ruiz, J.C.Bellido & A.Donoso Optimal Design of
Piezoelectric Transducers
-
IntroductionProblem formulation
Numerical approach and examplesConclusions and future work
Square plate clamped on its four edges
In-plane
(a) 1st mode (b) 2nd mode (c) 3rd mode (d) 4th mode
Out-of-plane
(e) 1st mode (f) 2nd mode (g) 3rd mode (h) 4th mode
D.Ruiz, J.C.Bellido & A.Donoso Optimal Design of
Piezoelectric Transducers
-
IntroductionProblem formulation
Numerical approach and examplesConclusions and future work
1 Introduction
2 Problem formulation
3 Numerical approach and examples
4 Conclusions and future work
D.Ruiz, J.C.Bellido & A.Donoso Optimal Design of
Piezoelectric Transducers
-
IntroductionProblem formulation
Numerical approach and examplesConclusions and future work
Advantages of simultaneous optimization
Simultaneous optimization vs “Single” optimization
Isolated modes1st 2nd 3rd 4th
In-plane 106% 7% 2% 25%Out-of-plane 0% 36% 73% 56%
Isolated modes1st 2nd 3rd 4th
In-plane 73% 17% 39% 7%Out-of-plane 5% 9% 7% 0%
Isolated modes1st 2nd 3rd 4th
In-plane 11% 11% 307% 34%Out-of-plane 1% 2% 2% 2%
D.Ruiz, J.C.Bellido & A.Donoso Optimal Design of
Piezoelectric Transducers
-
IntroductionProblem formulation
Numerical approach and examplesConclusions and future work
Troubleshooting
Local optima: Symmetry absence is the unique evidence.
Solution:continuation methods.
Mode switching: Changes in topology modifies eigenmodes order.
Solution:mode tracking (MAC).
0 50 100 150 200 250 3000
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
Iteration number
Mode s
wit
ch
ing
ω
ω
ω
ω
D.Ruiz, J.C.Bellido & A.Donoso Optimal Design of
Piezoelectric Transducers
-
IntroductionProblem formulation
Numerical approach and examplesConclusions and future work
Troubleshooting (cont.)
Spurious modes: Due to bad modelling. Spoils frequency spectrum.
Solution:suitable relationship between stiffness and mass of the
material.
Normalization of eigenvectors: M-orthonormal eigenvectors cause
convergenceproblem. Solution: normalization of eigenvectors with
respect to the identitymatrix.
Appearance of grey areas: Nature of the problem favours the
appearance oflarge grey areas. Solution: introduction of a new
interpolation scheme in theexpression of the collected charge.
Repeated eigenvalues: Can appear at any time. Solution: the use
of referenceeigenmodes to fix the basis.
D.Ruiz, J.C.Bellido & A.Donoso Optimal Design of
Piezoelectric Transducers
-
IntroductionProblem formulation
Numerical approach and examplesConclusions and future work
Future work
Introduction of a gap-phase in the electrode
Gap
Introduction of supports as a new variable
Fabrication and testing
Transducers with only one electrode
D.Ruiz, J.C.Bellido & A.Donoso Optimal Design of
Piezoelectric Transducers
-
Thank you for your attention!
IntroductionProblem formulationNumerical approach and
examplesConclusions and future work